
REVERSE ENGINEERING & THE EDUCATION SYSTEM: BIOMIMETIC ROBOTS Vivek Kumar Team Mentor

TEAM GENIUS
• Founded in 2010 as a private robotics/science team
• Global science competitions: • FIRST Robotics • IEEE robot design • National eCybermission Competition • Google Lunar X-Prize Moonbots • Robocup Junior

KEY POINTS
• Reverse engineering a biomimetic system can be used in the classroom to teach engineering and biological principles
• The process of reverse engineering consists of two parts: operational and structural analysis
• Reverse engineering can be used to gain a competitive advantage

BIOMIMETIC ROBOT SYSTEMS
• Biomimetics, \ˌbī-ō-mə-ˈme-tik\, - the study of biological mechanisms and processes for the purpose of creating an artificial duplicate
• Artificial Intelligence Research
• Biological Studies/Labs- LEGS
• Reverse Engineering Teaches two things: • Biology e.g., anatomy • Mechanical Engineering

REVERSE ENGINEERING PROCESS
Operational Analysis
Structural Analysis
According to ASME and PLTW Standards
Reverse Engineering: the process of taking something apart and analyzing it in detail

GLOBAL USE
• Military
• Software Engineers
• Healthcare Professionals
• Mechanical and Electrical Engineers
• Tech companies
• Designing/Manufacturing Companies

REVERSE ENGINEERING AND EDUCATION
Engineering, STEM,
Robotics
• Reverse Engineering Currently Existing Devices which display prominent engineering principles
• Provide insight into new and exciting technology • Facilitate design/engineering teaching • Help students gain leverage in the engineering design field
Non- STEM Related
Concepts
• Conceptually learn about another subject through reverse-engineering the device which uses that subject (In this case, biology)
• Example: Cosmetics through reverse-engineering the chemical composition of makeup

ROBOT SYLLABUS
Operational and Structural Analysis
Operational: Quadrupeds,
Stickybot
Structural: Sloth, Spider,
Elephant

QUADRUPEDS

OPERATIONAL ANALYSIS QUADRUPEDS

STICKYBOT

OPERATIONAL ANALYSIS STICKYBOT

SLOTH
Engineering Principles
• Gear Trains
• How to effectively use gear ratios
• How to maximize motor/power efficiency
Anatomical Principles
• Sloth Arm Comparative Speed
• Sloth Arm motion (shoulder Muscle)
• Body Orientation
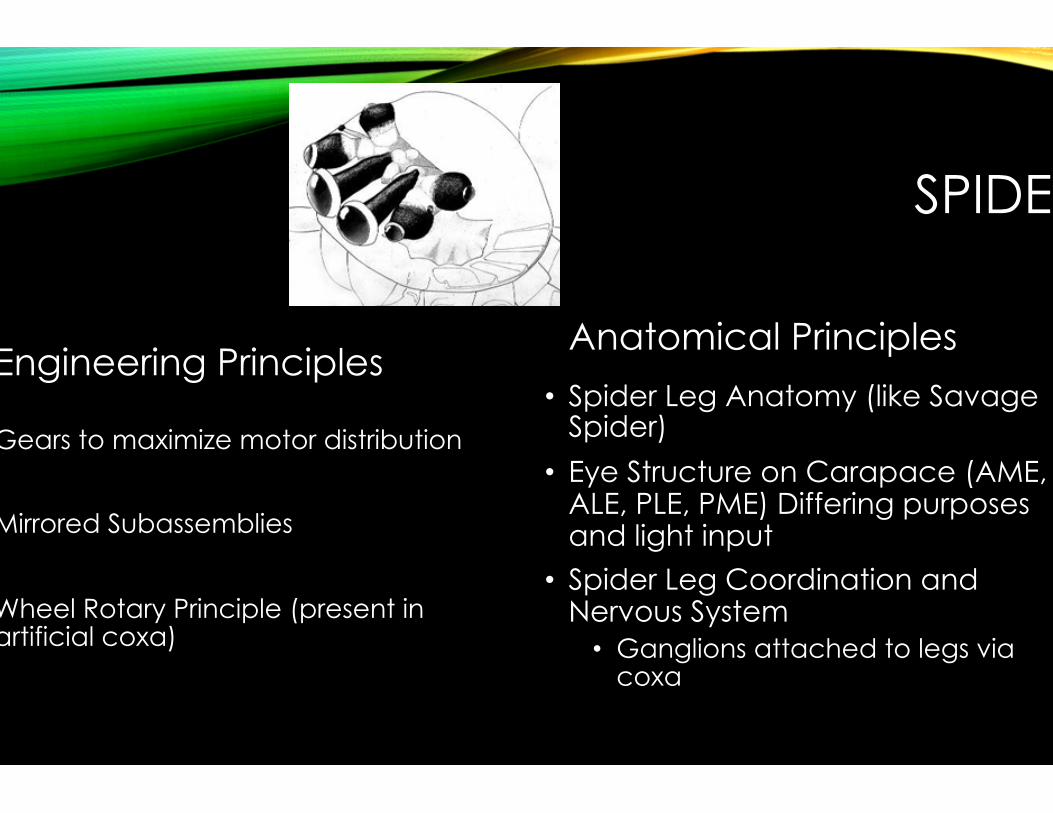
SPIDER
Engineering Principles
• Gears to maximize motor distribution
• Mirrored Subassemblies
• Wheel Rotary Principle (present in artificial coxa)
Anatomical Principles
• Spider Leg Anatomy (like Savage Spider)
• Eye Structure on Carapace (AME, ALE, PLE, PME) Differing purposes and light input
• Spider Leg Coordination and Nervous System • Ganglions attached to legs via
coxa
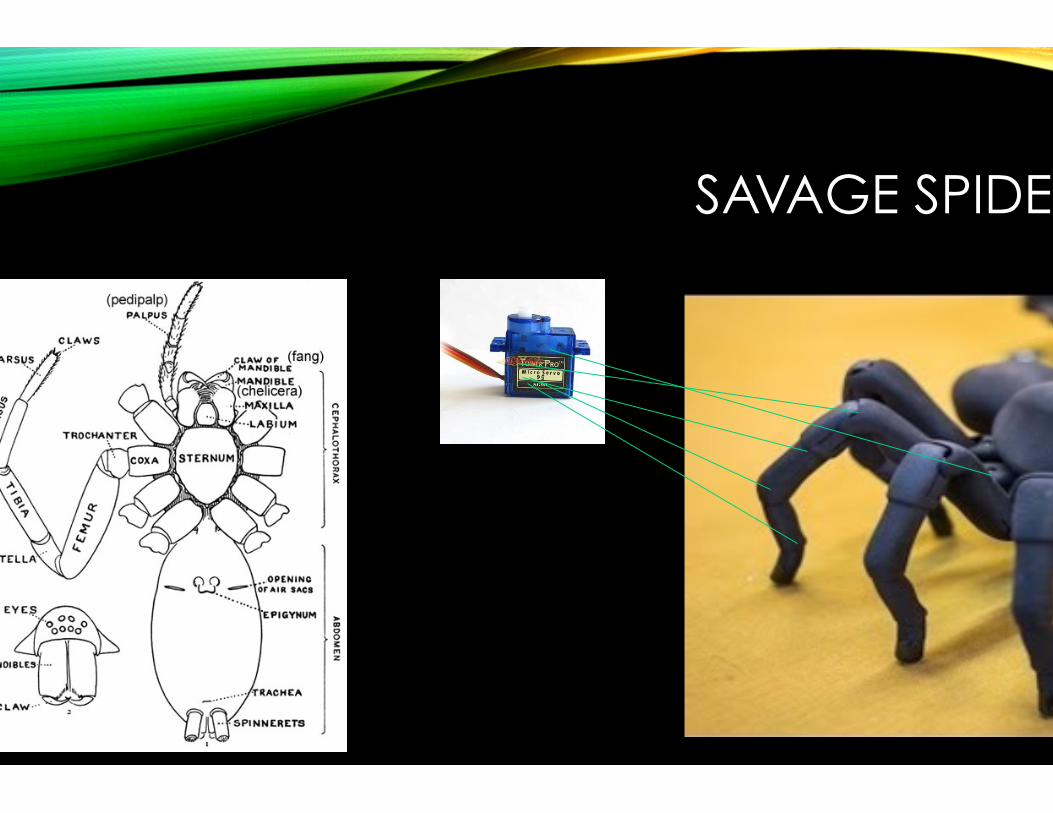
SAVAGE SPIDER

ELEPHANT
Engineering Principles • Framework:
• Body’s beam structure • Leg’s beam Structure • Framework/Fabrication stability/
Geometric stability Concepts • Wheel Rotary Principle • Gear Ratios and Unique Gear Train Use • Beam Pivot Utilization • Weight Distribution • Multiple Sub-Assemblies- observing
symmetry- expanding from a central subassembly
Anatomical Principles
• Elephant Tail and Trunk • Trunk and tusk Structure- Misconception in
trunk
• Bulk and Quadruped Coordination
• Leg Muscle Structure and Function
• Leg Joints (ankle)

APPLICATION TO ROBOCUP CHALLENGES
• Rescue • Rescue mechanisms • Ebm-Papst Cylinder Lifters
• Humanoid • Reverse of Biomimetic robots
• Soccer • Shooting Mechanism present in many other devices (Pinball Machine, Tennis ball
machine, toys, etc.) • Sensory Use

APPLICATION BY TEAM GENIUS
• Reverse engineering by Team Genius • Driving Device of Minion Robots • Framework of Minion Robots
• Other Science competitions • eCybermission (Cell Phone Charger) • FLL (FIRST Lego League)
Roomba by iRobot
Minion Robot by Team Genius

KEY POINTS
• Reverse engineering a biomimetic system can be used in the classroom to teach engineering and biological principles
• The process of reverse engineering consists of two parts: operational and structural analysis
• Reverse engineering can be used to gain a competitive advantage







