
RİJİT (KATI) CİSMİN RİJİT (KATI) CİSMİN KİNEMATİĞİKİNEMATİĞİKİNEMATİĞİKİNEMATİĞİ

Katı cisimlerin hareketlerinin tanımlanması ve analizi iki
yönden önem taşır.
Birincisi sıkça karşılaşılan bir durum olup amaç, değişik
tipte kam, dişli, çubuk ve bu gibi makina elemanlarını
kullanarak belirli bir tip hareketin yaratılmasını,kullanarak belirli bir tip hareketin yaratılmasını,
iletilmesini veya kontrolünü sağlamaktır. Burada
hareketin tanımı mekanik bağlantının dizayn geometrisini
(konstrüksiyon geometrisini) sağlamak için gereklidir.
Ayrıca yaratılan hareket göz önüne alınarak hesaplanması
gereken kuvvetler de belirlenir.

İkincisi, bir katı cismin üzerine uygulanan yükler
altındaki hareketini belirlemektir. Örneğin bir roketin
jet itmesi ve kendi ağırlığı altında hareket ederken
yörüngesinin saptanması 2. tip bir problemdir.
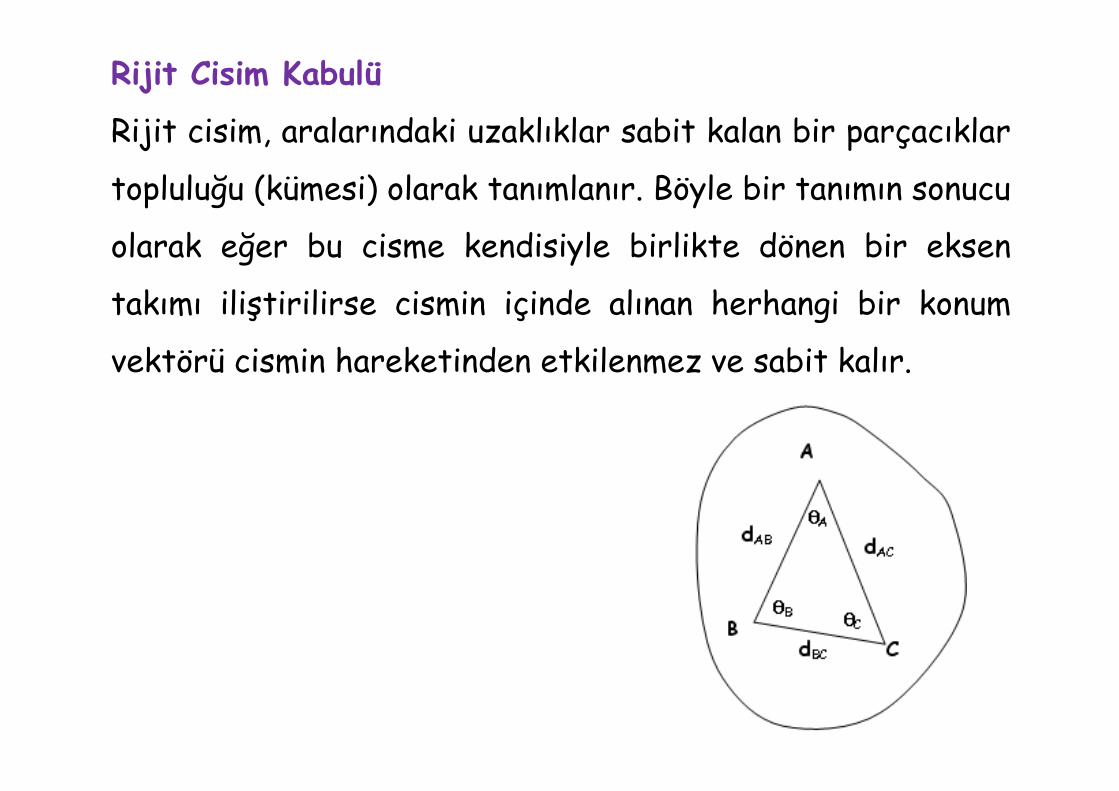
Rijit Cisim Kabulü
Rijit cisim, aralarındaki uzaklıklar sabit kalan bir parçacıklar
topluluğu (kümesi) olarak tanımlanır. Böyle bir tanımın sonucu
olarak eğer bu cisme kendisiyle birlikte dönen bir eksen
takımı iliştirilirse cismin içinde alınan herhangi bir konum
vektörü cismin hareketinden etkilenmez ve sabit kalır.

Bu durum ideal olup kuvvetlerin etkisinde her cisim az da olsa
bir miktar biçim değiştirecek ve içinde onu oluşturan
parçacıklar küçük de olsa yer değiştireceklerdir. Fakat bu
değişiklikler, cismin bir bütün olarak yaptığı harekete kıyasla
büyük bir genellikle güven içinde ihmal edilebilecek kadar
küçük ve önemsiz kalırlar.küçük ve önemsiz kalırlar.

1. ÖTELENME (Translation)
1a. Doğrusal Ötelenme
Bu harekette katı cisim içerisindeki her nokta birbirine paralel doğrular
çizer. Katı cismin tanımı gereği tüm parçacıkların hızları ve ivmeleri her
an birbirine eşittir.
Katı Cismin Düzlemsel Hareketinin Sınıflandırılması
Roket test kızağı

1b. Eğrisel Ötelenme
Katı cisim içerisindeki her nokta hareket boyunca birbirine paralel
eğriler çizer. Bu hareket düzlemde sabit bir nokta (veya bu sabit
noktadan geçen ve hareket düzlemine dik olan sabit bir eksen)
etrafındaki dönme hareketiyle karıştırılmamalıdır. Çünkü dönme
hareketinde katı cismin üstündeki her nokta eş merkezli çemberler
çizer. Eğrisel ötelemede ise her nokta ayrı bir eğri çizer ve buçizer. Eğrisel ötelemede ise her nokta ayrı bir eğri çizer ve bu
eğriler birbirine paraleldir.

2. Sabit Bir Eksen (Nokta) Etrafında Dönme
Katı cismin içindeki tüm noktalar eşmerkezli daireler çizerler. Ek olarak
katı cisim içine çizilmiş her çizgi dönme noktasından geçsin veya
geçmesin eşit zaman aralıklarında eşit açılar süpürerek dönerler. Eğrisel
ötelemede katı cisim içine çizilen düz bir doğru kendisine paralelliğini
korurken sabit bir eksen etrafındaki dönmede aynı doğru orijinal
doğrultusunu koruyamaz.
A
B
C
A′′′′B′′′′
C′′′′

3. Genel Hareket
Katı cismin düzlem içinde dönme ve ötelenme hareketlerini aynı anda
birlikte yapmasından doğan harekettir. Bu hareket bir ötelenme ve ardından
bir dönme veya bunun tersi bileşenlerinden oluşur.
A
A′′′′
B′′′′
BB

ωωωωO
Krank (crank)
(sabit eksen etrafında dönme)
Piston kolu, biyel (connecting rod) (genel hareket)
Piston
(ötelenme)
mafsal

Şekilde katı cismin düzlemsel hareketinde cisim içinde
alınan 1 ve 2 gibi herhangi iki doğrunun açısal konumları
görülmektedir. Bu açısal konumlar keyfi olarak seçilen
herhangi bir referans doğrultusundan itibaren belirli
bir yön (+) alınarak ölçülebilir. Şekilde bu referans
doğrultusu yataydır.
Katı Cismin Düzlemsel Hareketinde Açısal Yer Değiştirme
12 θθ && = 12 θθ &&&& =
Katı cismin tanımı gereği β açısı invaryanttır (değişmezdir).∆θ2 = ∆θ1 sonlu zaman aralığı süresince θ2 = θ1 + β bağıntısınınzamana göre türevi;
Katı cismin düzlemsel hareketinde cismin içindeki bütün doğrularaynı açısal yer değiştirme, aynı açısal hız ve aynı açısal ivmeyesahiptir.

Açısal Hareket Bağıntıları
Katı cismin düzlemsel dönme hareketinde, açısal hız (ω) ve açısal ivme (α),
dönme düzlemi içinde cismin üstünde yer alan herhangi bir doğru parçasının
açısal konumunun 1. ve 2. zaman türevlerine eşittir.
dd
dt
d
θω
θθ
ω
&&
&==
2
dθdorαdθ ωdω
dt
dor
dt
d
θθθ
θθ
αωω
α
&&&&
&&&
==
====
2
2
Sabit açısal ivme durumunda;
( )2
00
020
2
0
2
1
2
tt
t
αωθθ
θθαωω
αωω
++=
−+=
+=

SABİT EKSEN ETRAFINDA DÖNME
Katı cismin O’ dan geçen ve şekil düzlemine dik olan sabit bir eksen
etrafındaki dönüşünü göz önüne alalım. Bu dönüş esnasında cismin
dönme ekseni üzerinde bulunmayan tüm noktaları O etrafında eş
merkezli çemberler çizerek döner. Cisme ait herhangi bir A noktasının
çizgisel hareketi ile OA doğru parçasının açısal hareketi arasında
aşağıdaki bağıntılar bulunur:aşağıdaki bağıntılar bulunur:
α
ωω
ω
ra
vrvra
rv
t
n
=
===
=
/22

Aynı bağıntılar vektörel olarak da ifade edilebilir. Bunun için katı cismin
açısal hızı ve açısal ivmesi dönme düzlemine (x-y düzlemi) dik
olan açısal hız ve açısal ivme vektörleriyle belirtilir.
αrω
v
rrvvv&vv
×== ω
kkrrrr
ααωω == ,
( ) ( ){ {
{ ( )43421
rvvrrr
vrv
rvrr
rra
rrdt
rdr
dt
dr
dt
dv
dt
da ××+×=×+×=×== ωωαω
ωω
{ {43421
rr
rvrv nt aa
rv
dtdtdtdt×=ωα

ωv
Bir sağ takım olan xyz eksen takımında cisim xy düzlemi
içinde dönerken ve saat ibrelerinin tersi yönünde
(sity) ise , tersine olarak saat
ibrelerinin yönünde (siy) ise olur.
kkrrrr
ααωω +=+= ,
αr
kkrrrr
ααωω −=−= ,
Doğal olarak α ve ω’ nın mutlaka aynı yönde olması
beklenmez.

1. Bir dişli çarkın açısal hızı ω = 12 – 3t2 ifadesine uygun olarak
kontrol edilmekte olup burada ω rad/s ve t saniyedir. t = 0’dan t=3 s’ye
net açısal yer değiştirme ∆θ ‘yı bulunuz. Ayrıca üç saniye boyunca dişli
çarkın toplam devir sayısını bulunuz.
PROBLEMLER
ÇÖZÜM
( ) ( )
rad
radttdttd
dtddt
d
9
933123
312 , 312
33
0
33
0
2
0
=∆
=−=−=−=
=⇒=
∫∫θ
θθ
ωθωθ
θ
ÇÖZÜM

( ) ( )
( ) 73
12 312
1622123
312 312
2 312 0312
33
32
32
0
31
2
0
2
0
22
2
1
−=−=⇒−=
=−=−=⇒−=
===−=
∫∫
∫∫
radttdttd
radttdttd
sttt
θθ
θθ
ω
θ
θ
t = 0 ve t = 3 s aralığında dişli çark durmuş mudur?
t=2 s’ de duruyor.
ÇÖZÜM
( )
66.3 23evir
2 1
23716
73
312 312
2
32
2
2
0
2
=⇒
=−+
−=−=⇒−= ∫∫
Nradd N
raddevir
rad
radttdttd
π
θθ
devir

2. Kayışla döndürülen kasnak ve bağlı olduğu disk artan açısal hız ile
dönmektedir. Belirli bir anda kayışın v hızı 1.5 m/s ve A noktasının
toplam ivmesi 75 m/s2’dir. Bu an için (a) kasnak ve diskin α açısal
ivmesini, (b) B noktasının toplam ivmesini ve (c) kayış üzerindeki C
noktasının ivmesini belirleyiniz.
PROBLEMLER

222
222
CB2
45
/456075
/6015.020
/ 20075.0
5.1
?ac)?ab)?a) / 75 / 5.1
a
sma
smRa
sradr
v
smasmv
A
A
C
AC
t
n
=−=
===
===
=====
ω
ω
α
ÇÖZÜM
2
222
222
2
2
/5.22075.0300
/5.37305.22/30075.020
/5.22075.0300
/30015.0
45
smra
smasmra
smra
sradR
a
C
B
B
B
A
n
t
t
=⋅=⋅=
=+=
=⋅=⋅=
=⋅=⋅=
===
α
ω
α
α

3. Bir redüktör ünitesinin tasarım özellikleri incelenmektedir.
Şekildeki gibi A dişlisine 4 saniyelik bir sürede zamanla saatin tersi
yönünde (sity) bir α açısal ivmesi kazandırmak için t=2 s’ de bir
döndürme momenti A dişlisine uygulandığı zaman B dişlisi 300 dev/dak
ile dönmektedir. t=6 s’de B dişlisinin hızını hesaplayınız.
PROBLEMLER
sity

ÇÖZÜM
srad
dakdevNst
B
B
/1060
2300
/3002
ππ
ω =⋅=
=⇒=
Temas noktasında A ve B dişlilerinin hızları aynıdır.
( ) ( ) sradbbvv ABABA /202 =⇒=⇒= πωωω
( )
( ) ( )dakdevN
sradbbst
stsradtt
dttddt
dt
B
BBA
AA
t
AA
AA
A
/59.414
/415.4326
)6(/83.8622
20
22
6
2
2
6
220
=
=⇒=⇒=
==⇒+=−
+=⇒=⇒+= ∫∫=
ωωω
ωπω
ωω
ααω
π

Mutlak Hareket Analizi (Absolute Motion)
Bu yaklaşımda cismin geometrisinden yararlanılır. Konumu
veya başka bir değişken uzunluğu diğer büyüklükler
cinsinden (açısal büyüklükler dahil) yazılıp bu ifadenincinsinden (açısal büyüklükler dahil) yazılıp bu ifadenin
ardışık zaman türevleri alınarak hız ve ivmeye ulaşılır.

r yarıçaplı disk düz ve yatay zeminde sağa doğru kaymadan
yuvarlanmaktadır. Diskin açısal hareketini, merkezin doğrusal hareketi
cinsinden belirleyiniz. Ayrıca çevresi üstündeki bir noktanın hız ve
ivmesinin x ve y bileşenlerini belirleyip bu nokta zeminle temas ettiği
andaki hız ve ivmesinin özel değerlerini bulunuz .
PROBLEM

Bağıl Hareket Analizi
Parçacığın kinematiğinde bağıl hız bağıntısını çıkarırken A ve B gibi
birbirinden bağımsız hareket eden iki parçacık incelenmişti. Bu
parçacıklar arasındaki bağıl hız bağıntısı
vvvvvv
+=
Şimdi A ve B aynı katı cisim üzerindeki iki nokta ise aralarındaki mesafe
sabit olacak ve bu noktalardan biri üzerinde duran bir gözlemci diğer
noktanın dairesel hareket yaptığını görecek.
BABA vvv /vvv
+=

Aynı katı cisim üzerindeki A ve B noktalarını göz önüne alalım.
Hareketli koordinat sisteminin orijini B noktasında olsun, bu durumda
A’ nın hareketi iki şekilde oluşuyormuş gibi düşünülebilir. Cisim önce
AB doğrusuna paralel olarak A′’B′ konumuna ötelenir, daha sonra B
noktası etrafında Δθ açısı kadar döner. Ötelenme ‘yi, B
etrafında dönme ise ’ yi verir. Bu iki yer değişiminin toplamıBAr /v
∆Brv
∆
rrrvvv
∆∆∆ +=
BAr /v
∆
BABA rrr /vvv
∆∆∆ +=

B referans nokta alınarak, A ‘nın toplam yer değiştirmesi
BABA rrr /vvv
∆∆∆ +=
∆θ sıfıra yaklaşırken ‘nin şiddeti r∆θ ’dir. ∆t zaman aralığına
bölerek ve limite geçerek bağıl hız bağıntısını elde ederiz;
BAr /v
∆
A ve B arasındaki r mesafesi sabittir.
BABA vvv /vvv
+=A ve B arasındaki r mesafesi sabittir.

Bağıl hızın şiddeti
yerine kullanarak;
{ ( ) { ( )trtrvt
BAt
BA ∆θ∆∆∆∆∆
/lim/lim0
/0
/→→
==v
θω &=ωrv BA =/
BAr /v
rv
rv BAvvv
×=ω/
yerine kullanarak; BAr / r
Böylece bağıl hız bağıntısı;
rvv BAvvvv
×+= ω

Burada, yönü sağ el kuralı ile belirlenen hareket düzlemine dik doğrultuda olan açısal hızdır.
Bağıl hız her zaman A ve B noktalarını birleştiren doğruya diktir.
ωv
Ötelenme Sabit eksen
etrafında dönme

Bağıl İvme
ifadesi zamana göre türetilirse
BABA vvv /vvv
+=
BABA vvv /&v&v&v +=
BABA aaa /vvv
+=elde edilir.
Katı cisim ω açısal hızı ve α açısal ivmesi ile dönüyor olsun. Bağıl hız
teriminden farklı olarak burada bağıl ivme teriminin biri teğetsel diğeri
normal olmak üzere iki bileşeni vardır. B’ ye yerleşik gözlemci yine A
noktasını, B merkezli ve BA=r yarıçaplı bir dairesel hareket yapıyor
gibi görür.
BABA aaa /+=

Bağıl ivmenin bileşenlerinin şiddeti;
( ) ( )tBAnBABA aaaa //
vvvv++=
( )( ) α
ω
rva
rrva
BAtBA
BAnBA
==
==
//
22// /
&
Vektörel formda; ( ) ( )ranBA
vvvv××= ωω/( ) ( )
( ) ra
ra
tBA
nBAvvv
×=
××=
α
ωω
/
/
( ) rraa BAvvvvvvv
×+××+= αωω

Bağıl aA/B ivmesinin (aA/B)t teğetsel bileşeni α’ nın yönüyle uyumlu
olarak daima BA doğrultusuna A noktasında diktir. (aA/B)n normal
bileşen ise daima A’ dan B’ ye yönelik olarak AB doğrultusu üzerinde
yer alır. Dolayısıyla vektör poligon çizilirken (aA/B)t BA’ ya dik
doğrultuda, (aA/B)n ise BA’ ya paralel doğrultuda ve A’ dan B’ ye yönelik
olarak alınır.

Bir mekanizmada hız ve ivme analizleri yapılırken önce daima
(sorulmasa bile) hız analizi yapılır. Sonra ivme analizine geçilir. Çünkü
hız analizinden elde edilecek olan açısal hız veya hızlar mutlaka ivme
analizinde kullanılacaktır.
Bazen bir mekanizmada bir noktanın hızını veya ivmesini bulmak için bu
noktaya iki ayrı yönden yaklaşılır. Bu şekilde bu noktanın hız ve ivmesi
iki kez yazılıp bunlar eşitlenerek arananlar bulunur.

1. Diskin O merkezi şekilde gösterilen hız ve ivmeye sahiptir. Disk
kaymadan yuvarlandığına göre A noktasının hızı ile B’nin ivmesini
görülen an için hesaplayınız.
PROBLEMLER

2. Üçgen plaka ABD siy’de sabit 3 rad/s açısal hıza sahiptir. Görülen
an için BC kolunun açısal hızı ve açısal ivmesini hesaplayınız.
PROBLEMLER

3. Şekildeki konumu içeren an için A noktasının hızı sağa doğru 3 m/s
ise B noktasının ivmesinin teğetsel bileşeni ile AB çubuğunun açısal
ivmesini hesaplayınız.
PROBLEMLER

4. OAE dilimine takılı esnek F bandına şekilde gösterildiği gibi 4 m/s
sabit hız verilmiştir. BD’nin OA’ya dik olduğu anda BD’nin açısal
ivmesini hesaplayınız.
PROBLEMLER

5. Belirli bir anda dişli şekildeki gibi bir açısal harekete sahiptir.
Bağlantı çubuğu üzerindeki A ve B noktalarının ivmelerini ve AB
bağlantı çubuğunun açısal hız ve açısal ivmesini belirleyiniz.
PROBLEMLER

6. Yatay yüzey üzerinde kaymadan yuvarlanan diskin O merkezi
şekilde gösterilen hız ve ivmeye sahiptir. Diskin yarıçapı 4.5 cm’dir. B
noktasının hızını ve ivmesini hesaplayınız.
PROBLEMLER
v =45 cm/s a =90 cm/s
37o
A
O4 cm
4.5 cm
vo=45 cm/s ao=90 cm/s2
10 cm
6 cm
B
x
y
x=2 cm2
4
1xy =







