Solving Delay Differential Equations in S-ADAPT by
Method of Steps
Wojciech Krzyzanski1
Robert J. Bauer2
1Department of Pharmaceutical Sciences, University at Buffalo, Buffalo, NY, USA 2ICON Development Solutions, Ellicott City, USA

Cell Populations of PharmacodynamicInterest
• hematopoietic cells (RBC, WBC, PLT)• bacteria and viruses• neoplastic cells
Cell PopulationProduction Loss
tissue uptakesenescencerandom destructionmaturation
mitosisdifferentiationmaturation
• parasites

Erythropoiesis
Eliott et al., Exp. Hematol. 36:1573 (2008)
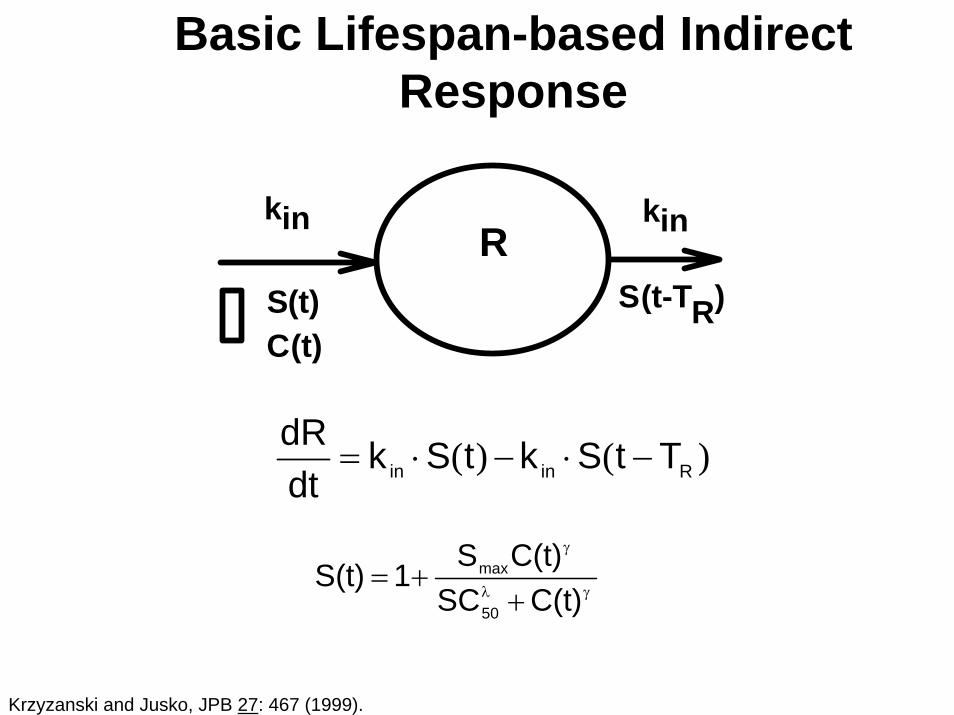
kin
S(t)
Rkin
S(t-TR)C(t)
)()( Rinin TtSktSkdtdR
−⋅−⋅=
γλ
γ
++=
C(t)SCC(t)S1S(t)
50
max
Basic Lifespan-based Indirect Response
Krzyzanski and Jusko, JPB 27: 467 (1999).

0 5 10 15Seru
m rH
uEPO
Con
cent
ratio
n, IU
/L
10
100
1000
10000
Time, day0 5 10 15 20
Ret
icul
ocyt
es, %
1
2
3
4
5
6
7
Data from K Cheung et al. Clin. Pharmacol. Ther. 64: 412 (1998)
kin kin kin
S(t)C(t)
S(t-TP) S(t-TP-TR)P R
Stimulation of Reticulocyte Production by Epoetin Alfa
EPO serum concentrations (upper panel) and reticulocyte counts (lower panel) after subcutaneous administration of EPO doses of 450, 900, 1350, and 1800 IU/kg.
)TTS(tk)TS(tkdtdR
RPinPin −−⋅−−⋅=

General Form of DDE System
x(t) = vector of states at time t.T1, …, Tp = delay times.x0 = state vector in the past.
The rate of change of x depends not only on the current value x(t), but also on the system states before times T1 , …, Tp: x(t-T1),…, x(t-Tp).
))Tt(x),...,Tt(x),Tt(x),t(x,t(fdtdx
p21 −−−=
x(t)= x0, for t ≤ 0
for t > 0

DDE Solvers
•DELSOL (Fortran)Willie DR and Baker CTH. DELSOL – a numerical code for the solutions of systems of delay-differential equations. Appl. Numer. Math. 9:223-234 (1992).
•RETARD, RADAR5 (Fortran)Hairer E, Norsett SP, and Wanner G. Solving Ordinary Differential Equations I: Nonstiff Problems. . Berlin, Springer, 1993.http://univaq.it/~guglielm/guglielmi_eng.html#SO
•dde23 (MATLAB)Shampine LF and Thompson S. Solving DDEs in MATLAB. Appl. Num. Math. 37:441-458 (2001).http://www.radford.edu/~thompson/webddes/index.html
Algorithms based on the Runge-Kutta Method:
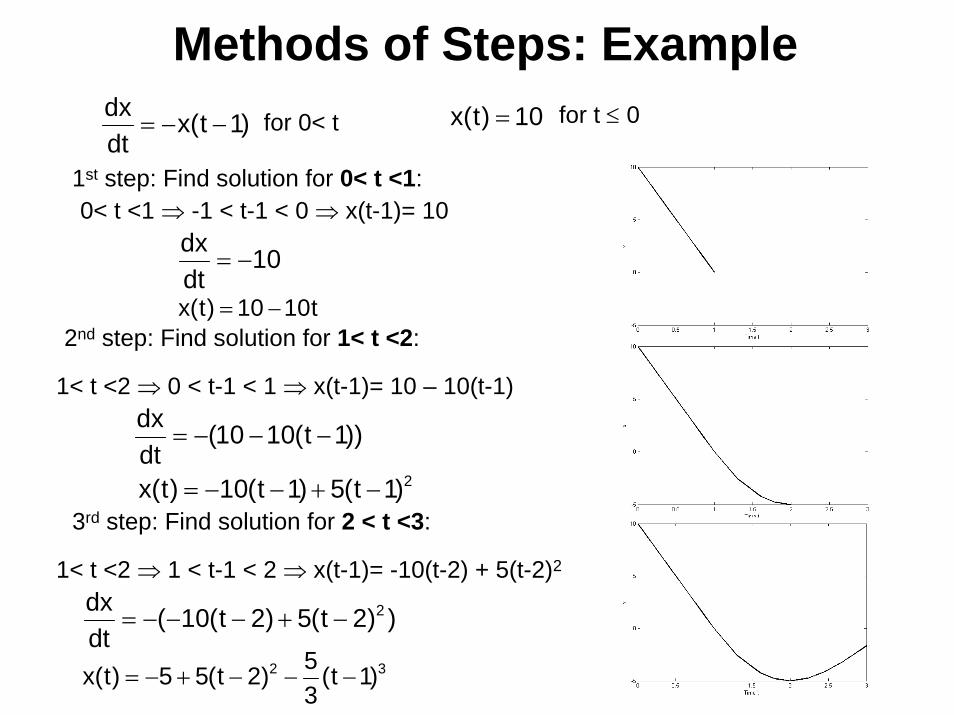
Methods of Steps: Example)1t(x
dtdx
−−= 10)t(x = for t ≤ 0
1st step: Find solution for 0< t <1:0< t <1 ⇒ -1 < t-1 < 0 ⇒ x(t-1)= 10
for 0< t
10dtdx
−=
t1010)t(x −=2nd step: Find solution for 1< t <2:
1< t <2 ⇒ 0 < t-1 < 1 ⇒ x(t-1)= 10 – 10(t-1)
))1t(1010(dtdx
−−−=
2)1t(5)1t(10)t(x −+−−=3rd step: Find solution for 2 < t <3:
1< t <2 ⇒ 1 < t-1 < 2 ⇒ x(t-1)= -10(t-2) + 5(t-2)2
))2t(5)2t(10(dtdx 2−+−−−=
32 )1t(35)2t(55)t(x −−−+−=

Methods of Steps: Numerical
)2t(xdt
dy2 −−=
10dt
dy3 −=
)1t(xdtdx
−−= 10)t(x = for t ≤ 0
To find a solution for 0< t <3: y1(t)=x(t), y2(t)=x(t-1)
for 0< t
)t(ydt
dy2
1 −=
Since t -2 > 0 for some t, we need to calculate x(t-2): y3(t)=x(t-2)
)3t(xdt
dy3 −−=
Since t -3 < 0 for all 0 < t <3 : x(t-3) = 10 and
Initial conditions: y1(0)= 10, y2(0) = 10, y3(0) = 10
)t(ydt
dy3
2 −=
Method of Steps
Driver RD. Ordinary and Delay Differential Equations. New York, Springer-Verlag, 1977. http://www.radford.edu/~thompson/webddes/tutorial.html
•If for a time interval ti < t < ti+1 (“a step”) the delay ti+1- T is less than ti, then delayed state y(t-T) defined by its values for times less than ti, which makes y(t-T) a “known” variable.
•If all delayed variables become “known” over the time interval ti < t < ti+1, then for this time interval the system does not have unknown delay variables and becomes an ODE system.
• Methods of steps transforms a system of DDEs into a system of ODEs.

Methods of Steps: NONMEM
• Delay is introduced to the state variables using ALAG.• Limited number of ODEs (99).• Limited number of ALAGs (20).

S-ADAPT
http://bmsr.usc.edu/Software/BMSRsoftware.html
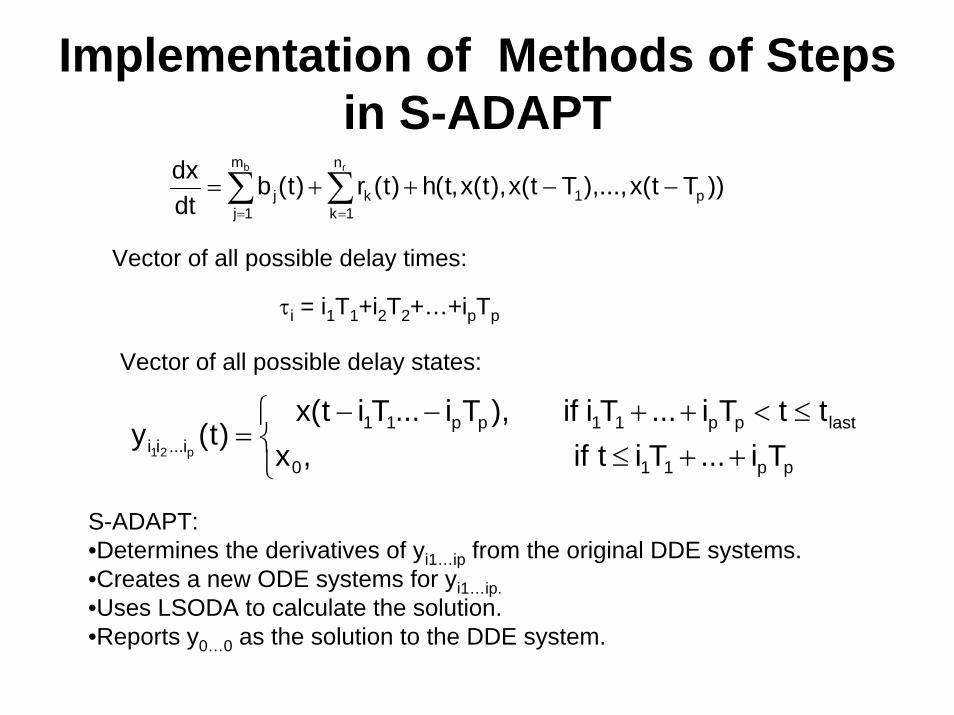
Implementation of Methods of Steps in S-ADAPT
∑ ∑= =
−−++=b rm
1j
n
1kp1kj ))Tt(x),...,Tt(x),t(x,t(h)t(r)t(b
dtdx
τi = i1T1+i2T2+…+ipTp
⎩⎨⎧
++≤≤<++−−
= Ti...Ti t if ,x
ttTi...Ti if ),Ti...Tit(x)t(y
pp110
lastpp11pp11i...ii p21
Vector of all possible delay times:
Vector of all possible delay states:
S-ADAPT:•Determines the derivatives of yi1…ip from the original DDE systems. •Creates a new ODE systems for yi1…ip. •Uses LSODA to calculate the solution.•Reports y0…0 as the solution to the DDE system.

Implementation of Methods of Steps in S-ADAPT
• Mapping integer combinations of the delay times.
• Filtering and sorting delay times.• Creating the ODE system.• Bolus and zero-order infusion input.• Handling the time dependent DDE
systems.
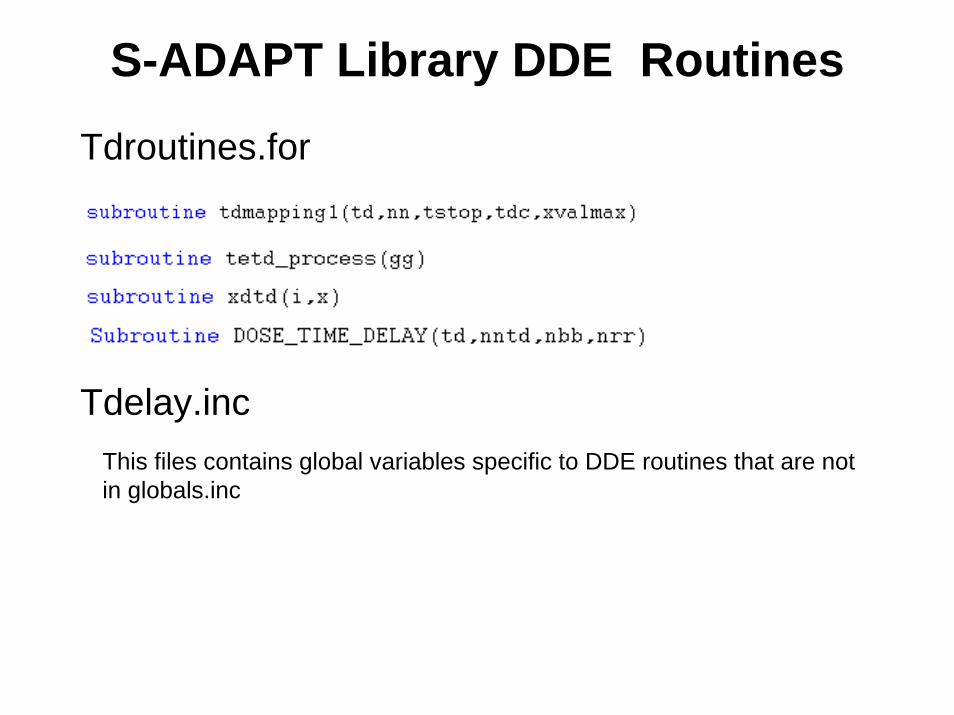
S-ADAPT Library DDE Routines
Tdroutines.for
Tdelay.incThis files contains global variables specific to DDE routines that are not in globals.inc

S-ADAPT User Defined DDE Routines
Model_Del.for

Multiple IV Boluses to One Compartment with Delayed Elimination
)Tt(Ak)tt(DosedtdA m
1ii −⋅−−δ⋅= ∑
=for t >0
A(t) = A0, for t ≤ 0
D = 10 doseBolus times t1 = 0,t2 = 1, t3 = 2,t4 = 3 k = 1 elimination rate constant.T = 2 delayA0 = 0 past
MATLAB dde23 generated solution

User Defined Model

Output Subroutine

Symbol Subroutine
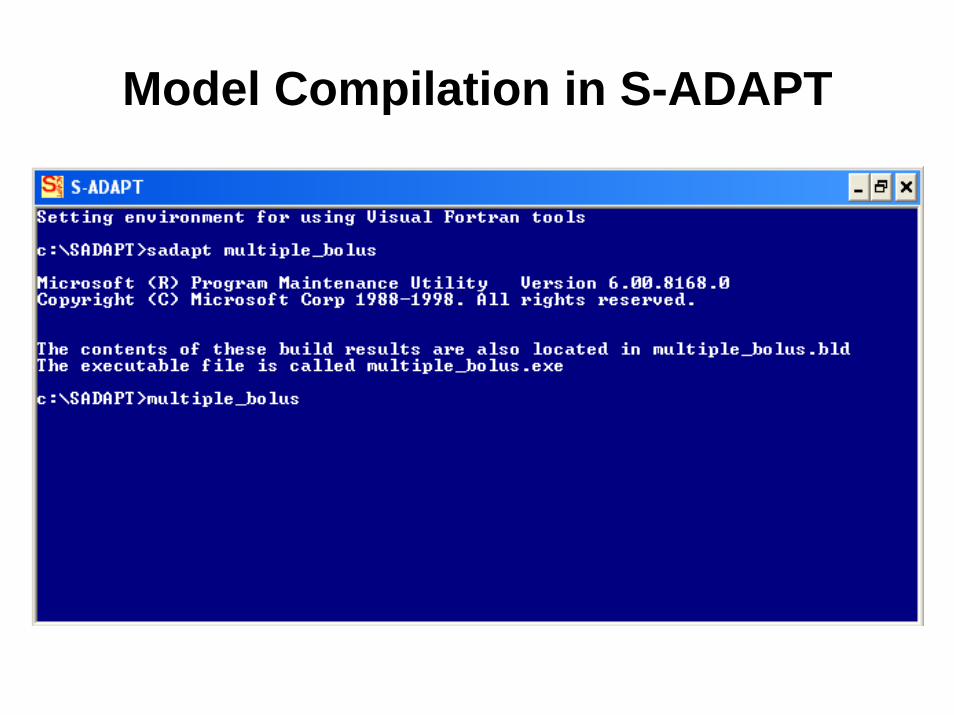
Model Compilation in S-ADAPT
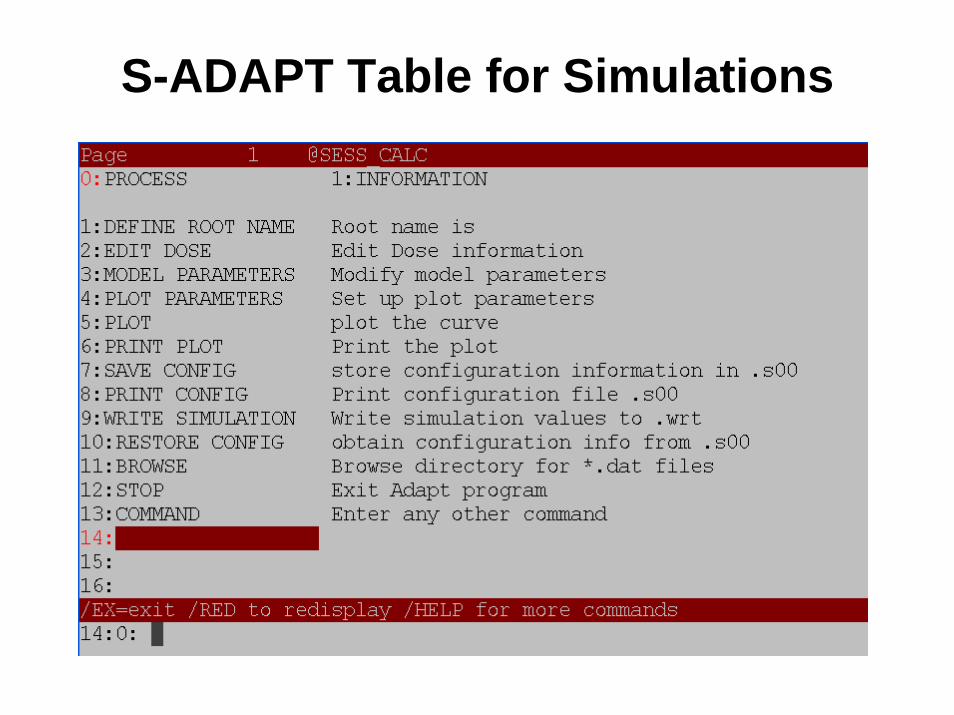
S-ADAPT Table for Simulations

Model Input

Model Output

S-ADAPT vs. MATLAB
MATLAB: RelTol=10-4 AbsTol=10-6
S-ADAPT: RelTol=10-8 AbsTol=10-8

PK/PD Model of rHuEPO Stimulatory Effect on RBC Production
S. Woo et al., J. Pharmacokinet. Pharmacodyn. 34:849-868 (2007).

Model Equations( ) pTtppteloffonEPO VAkCkkRCkCRkk
dtdC
⋅+⋅+−⋅+⋅⋅−=
TtppptT AkVCk
dtdA
⋅−⋅⋅=
RkRCkCRkkdtdR
degoffonsyn ⋅−⋅+⋅⋅−=
( ) RCkkCRkdt
dRCintoffon ⋅+−⋅⋅=
)TTTt(I)TTt(S)TTTt(Sk
)TTt(I)Tt(S)TTt(Skdt
dRET
RET2P1PRET2PRET2P1Pin
2P1P2P2P1Pin
−−−⋅−−⋅−−−⋅
−−−⋅−⋅−−⋅=
)TTTTt(I)TTTt(S)TTTTt(Sk
)TTTt(I)TTt(S)TTTt(Skdt
dRBC
RBCRET2P1PRBCRET2PRBCRET2P1Pin
RET2P1PRET2PRET2P1PinM
−−−−⋅−−−⋅−−−−⋅
−−−−⋅−−⋅−−−⋅=
)t(RCSC)t(RCS1)t(S
50
max
+⋅
+=)t(HbIC
)t(HbI1)t(I50
max
Δ+Δ⋅
−= )t(RBCMCH)t(Hb ⋅=

S-ADAPT Del_Diffeq and Del_Otput

S-DAPT Dosing and Parameters

C and ATS-ADAPT MATLAB

R and RCS-ADAPT MATLAB

RET and RBCMS-ADAPT MATLAB

Conclusions
• The methods of steps transforms a system of DDEs into a systems of ODEs.
• S-ADAPT implementation of the methods of steps allows solving DDEs with a constant past and bolus inputs.
• S-ADAPT solutions are identical with MATLAB dde23 generated solutions given the same tolerance levels for numerical error.
• S-ADAPT is the first program designed for population PK/PD analysis that is capable of solving arbitrary DDE models
Acknowledgments
• Aman Singh, Department of Pharmaceutical Sciences, University at Buffalo.
• NIH Grant GM57980 from the National Institutes of General Medical Sciences.
Please e-mail [email protected] for• S-ADAPT DDE solver routines.• S-ADAPT codes for presented examples.







