Download - teste matematici

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 1/42
¡ ¢ £ ¤ ¥ ¦ ¡ § ¨ © © ¦ © ¦ ¡ ¦ £ £ ¢
! " " # $ % & ' ( " ) $ 0 ( 1 2 " 3 ( $ 4 ! " " ) ' ( $ % ' 2 ' 5 " % $ % 4 ! " " # $ % & ' ( " ) $
¥ $ 6 " 2 " ! " $
Fie V o mulime nevidă de elemente şi K un corp de scalari şi fie:
- o lege de compoziie internă (notată aditiv)“+”: V V V →× y x y x +→),(
- o lege de compoziie externă (notată multiplicativ) “. “: V V K →× xk xk ⋅→),(
Spunem că tripletul (V,+,.) este spaiu liniar (sau spaiu vectorial peste corpul K) notat V/K dacă:
1. (V,+) formează o structură de grup abelian2. (V,.) satisface axiomele:
V x x xastfelcacorpulK unitatedinelementul K
x x K V x
x x x K V x
y x y x K V y x
∈∀=⋅∈∃
⋅⋅=⋅⋅⇒∈∈∀
⋅+⋅=⋅+⇒∈∈∀
⋅+⋅=+⇒∈∈∀
)(1)(1)(
)()(,,)(
)(,,)(
)(,,)(
β α β α β α
β α β α β α
α α α α
7 4 $ ( # ! " "
a) Dacă K este identic cu R sau C, atunci spaiul vectorial peste K este real, respectivcomplex.
b) Elementele lui V se numesc vectori, iar elementele lui K se numesc scalari.
8 $ 5 ) 9
==∀∈==≤≤
≤≤ n jmi K aa A K nmM ijn jmiij ,1,,1)(/)();,(
11 cu operaiile:

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 2/42
n jmiijij
def
ba B A≤≤
≤≤+=+11
.
)( unde
n jmiij
n jmiij
b B
a A
≤≤≤≤
≤≤≤≤
=
=
11
11
)(
)(
n jmiij
def
ak Ak ≤≤
≤≤⋅=⋅ 11)(
3 ( & " % 9 ) (
pentru m=1 sau n=1 se obine spaiul matricelor cu o linie sau cu o coloană
¨ 3 ¡ ¢ " £ " 5 $ 2 4 " 9 2 $ 0 © $ ( $ 3 $ 2 & ( $ 9 2 9 " # $ % & ' ( ¤ 2 & ( ¥ ' 7 3 ¡
¥ $ 6 " 2 " ! " $
a) Fiind dai vectorii { }nvv ,...,1 şi scalarii nα α ,...,1 vectorul nnvvvv α α α +++= ...2211 se
numeşte combinaie liniară a vectorilor nivi ,1, =
b) Spunem că v este un vector combinaie liniară a sistemului de vectori { }I iivS ∈= dacă există
în S vectoriiniii vvv ,...,,
21şi scalarii nα α ,...,1 astfel încât
ninii vvvv α α α +++= ...21 21
¥ $ 6 " 2 " ! " $
Vectorii nvvv ,...,, 21 se numesc liniar independeni dacă pentru orice
K i ∈α , ∑=
=⇒=n
i
iiiv1
00 α α )(∀ ni ,1=
7 4 $ ( # ! " $
Dacă sistemul de vectori { }nvvS ,...,1= este liniar independent, atunci orice
subsistem al său este tot liniar independent.
¥ $ 6 " 2 " ! " $
Vectorii nvvv ,...,, 21 se numesc liniar dependeni dacă nu sunt liniar independeni, adică există
K i ∈α , nu toi nuli, astfel încât ∑=
=n
i
iiv1
0α .
7 4 $ ( # ! " $
a) Dacă sistemul de vectori { }nvvS ,...,1= este liniar dependent, atunci orice suprasistem al său
este tot liniar dependent.

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 3/42
b) Sistemul de vectori { }vS = este liniar dependent ⇔ 0=v . Orice sistem de vectori care
conine vectorul nul este liniar dependent.
( ' ' 3 " ! " $
a) Vectorii { }nvvv ,...,, 21 sunt liniar dependeni ⇔ cel puin unul este o combinaie liniară
a celorlali. b) Dacă vectorii { }nvvv ,...,, 21 sunt liniar independeni, iar { }121 ,...,, +nvvv sunt liniar
dependeni atunci 1+nv este o combinaie liniară a vectorilor { }.,...,, 21 nvvv
Demonstraie
a) { }n x x x ,...,, 21 liniar dependeni ⇒ )(∃ n scalari ,,...,1 nα α nu toi nuli, astfel încât
∑=
=n
i
ii x1
.0α Fie nn x x x1
21
211 ...0
α
α
α
α α −−−=⇒≠
Reciproc: dacă 0...1... 221221 =−−−⋅⇒++= nnnn x x x x x x α α α α unde coeficienii
nα α −− ,...,,1 2 nu sunt toi nuli );01( ≠
b) { }121 ,...,, +n x x x sunt liniar dependeni 1,1,)( +=∃⇒ niiα nu toi nuli astfel încât
∑+
=
=1
1
0n
i
ii xα
01 ≠+nα altfel ni x i
n
i
ip
ind linii ,1)(00
1
.
..=∀=⇒=∑
=
α α şi se obine contradicie cu ipoteza
Deci: n
n
n
nn
n x x x x
1
2
1
21
1
11 ...
+++
+ −−−−=
α
α
α
α
α
α

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 4/42
¥ $ 6 " 2 " ! " $
Sistemul de vectori { }nii g G ,1== se numeşte sistem de generatori pentru V dacă orice vector din
V este o combinaie liniară finită de vectori din G, adică
K G g g V v nn ∈∈∃∈∀ α α ,...,,,...,)()( 11 astfel încât ∑==
n
iii g v 1α
¥ $ 6 " 2 " ! " $
Un sistem de vectori { }I iib B ∈= formează o bază a spaiului vectorial V dacă:
i) B este sistem de vectori liniar independeniii) B este sistem de generatori pentru V.
¥ $ 6 " 2 " ! " $
Spaiul vectorial V se numeşte finit dimensional dacă are o bază finită.
( ' ' 3 " ! " $
Într-un spaiu vectorial, orice vector se scrie în mod unic ca o combinaie liniară de vectori ai
bazei: ∑=
=n
i
iieav1
, unde { }nee E ,...,1= bază.
Demonstraie: Fie V spaiu vectorial cu baza { } .,,...,1 V vee E n ∈= Rezultă că E este sistem de
generatori pentru V şi ∑=
=n
i
iieav1
, ∑=
=n
i
iiebv1
⇒ ∑=
=−⇒=⋅−n
i
iiind lin
iii baeba1
..,00)( adică
niba ii ,1)(, =∀=
¥ $ 6 " 2 " ! " $
naa ,...,1 se numesc coordonatele vectorului v în baza E şi vom nota:
[ ]
==
n
t
n E
a
a
aav
.
.
.
),...,(
1
1

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 5/42
¥ $ 6 " 2 " ! " $
Se numeşte dimensiune a unui spaiu vectorial finit dimensional X, cardinalul unei baze (numărulde vectori al unei baze).
( ' ' 3 " ! " $
Într-un spaiu vectorial de dimensiune n, orice sistem de n vectori liniar independent formează o bază.
Demonstraie
n X =dim şi { }n x xM ,...,1= liniar independent. Rămâne de arătat că M este şi sistem de
generatori. Fie ; X x∈ sistemul de vectori { } x x x n ,,...,1 liniar dependent ⇒ x este o combinaieliniară de vectori .,...,1 n x x
7 4 $ ( # ! " $
Într-un sistem n vectori liniar independeni, condiia de a fi sistem de generatori este înlocuită de
relaia X n dim= .
¢ ' £ " 6 " % ( $ % ' ' ( £ ' 2 & $ ) ' ( 9 2 9 " # $ % & ' ( ) 4 % " 5 7 ( $ 7 3 $ "
În spaiul V considerăm bazele:
{ }niie E ,1== , { }
n j jh H ,1=
=
şi coordonatele [ ] E j E h x , cunoscute.
Să se determine coordonatele [ ] . H x

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 6/42
[ ] n j
c
c
c
h
nj
j
j
E j ,12
1
=
=Μ
[ ]
=
n
E
x
x
x
xΜ
2
1
¥ $ 6 " 2 " ! " $
Se numeşte matricea de trecere de la baza E la baza H matricea:
( )n jiij
nnnn
n
n
c
ccc
ccc
ccc
C ,1,
21
22221
11211
==
=
Μ
ΜΜΜΜ
Μ
Μ
(are drept coloane coordonatele vectorilor h exprimate în
baza E).
[ ] [ ] [ ]( ) [ ] H E M hhhC not
E n E E ,,...,,
.
21 ==
Notăm [ ] ( )t
n H y y x ,...,1= coordonatele vectorului x în baza H pe care trebuie să le determinăm.
Avem: ∑ ∑ ∑ ∑ ∑∑= = = = ==
=
===
n
i
n
j
n
j
n
i
i
n
j
jij
n
i
iij j j jii e ycec yh ye x x1 1 1 1 11
.
Deoarece scrierea într-o bază este unică, rezultă sistemul liniar:
∑=
==n
j
i jij ni x yc1
,1, ⇔
=+++
=+++
=+++
nnnnnn
nn
nn
x yc yc yc
x yc yc yc
x yc yc yc
...
...
...
2211
22222121
11212111
Μ
sau scris matriceal:

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 7/42
[ ] [ ] [ ] [ ] E H E H xC x x xC ⋅=⇒=⋅ −1 -( $ ( $ 3 " 2 & ¡ ( $ ) ! " £ $ & ( 2 4 6 ' ( 5 ( $ % ' ' ( £ ' 2 & $ ) ' (
9 2 9 " # $ % & ' ( ( " 2 & ( $ % $ ( $ £ $ ) 7 3 % 2 ' 2 " % ¡ 4 ! " 9 ) 9 " ) 9 2 ' ( $ % ( $ 0
În R Rn
/ presupunem ( ) [ ] E t
n x x x x == ,...,1 , E baza canonică şi { } { } niinii g G f F ,1,1 ; == == altedouă baze din .n R Avem: [ ] [ ] E F xC x ⋅= −1 şi [ ] [ ] E G x D x ⋅= −1 cu matricele de trecere notate
),( F E M C = respectiv ),( G E M D = şi se obine:
[ ] [ ] [ ] [ ] [ ] F GG F E xC D x x D xC x 1−=⇒⋅=⋅=
( $ ( $ 3 " 2 & ¡ ( $ ) ! " £ $ & ( 2 4 6 ' ( 5 ( $ % ' ' ( £ ' 2 & $ ) ' ( 9 2 9 " # $ % & ' ( ( " 2 & ( $ % $ ( $ £ $ ) ' 7 3 ¡
' ( $ % ( $ ) ) &
unde ),(1 F GM C D =− este matricea de trecere la schimbarea bazei.
¢ $ & ' £ $ 2 9 5 $ ( " % $ £ $ ( $ 3 ' ) # ( $ 4 " 4 & $ 5 $ ) ' ( ) " 2 " ( $
¢ $ & ' £ $ ) " 5 " 2 ¡ ( " " % ' 5 ) $ & $ ¡ § 9 4 4 ¢ £ ' ( £ 2 ¤
permite:
• rezolvarea unui sistem compatibil de “n” ecuaii cu „n” necunoscute• determinarea rangului matricei, a matricei inverse• determinarea coordonatelor modificate ale vectorilor odată cu schimbarea bazei.
Sistemul ,b Ax = ( ) ,,1, n jiija A
== ( ) ,,...,1
t
nbbb = ( )t n x x x ,...,1= este adus prin transformări
elementare la forma echivalentă: b A Ix 1−=
Se aplică sistemului o transformare elementară T, astfel încât în etapa i, matricea ataşată
sistemului să aibă coloana i egală cu cea corespunzătoare din matricea unitate .n I
0)( ≠i
iia se numeşte " # ' & 9 ) & ( 2 4 6 ' ( 5 ¡ ( " "
Ecuaia i se împarte la pivot, iar celelalte (n-1) se înlocuiesc cu ecuaia echivalentă, rolultransformării fiind de a anula coeficienii lui i x în aceste ecuaii, ceea ce implică următoarele
etape la o iteraie:
- linia pivotului se împarte la pivot;- coloana pivotului se completează cu 0;- primele (i-1) coloane rămân neschimbate;- elementele celorlalte coloane se calculează cu regula pivotului (regula dreptunghiului)

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 8/42
Schematic,( $ 1 9 ) " # ' & 9 ) 9 "
sau a dreptunghiului este:
xba p
Λ; x devine ( )
pab px x −='
pab x x −='
Pentru linia pivotului 0)( ≠i
iia se fac următoarele operaii:
)()()1( / i
ii
i
ik
i
ik aaa =+ nk ,1= , ;ik ≠
)()()1( / i
ii
i
i
i
i abb =+
iar pentru celelalte linii avem:
)()()()()()1( / i
ii
i
li
i
ik
i
lk
i
ii
i
lk aaaaaa −=+;
)()()()()()1( / i
ii
i
i
i
li
i
l
i
ii
i
l ababab −=+
$ ( & ' ( " ) " 2 " ( " $ 4 ! " " # $ % & ' ( " ) $
Fie , K
X K
Y spaii vectoriale peste acelaşi corp K.
¥ $ 6 " 2 " ! " $
O funcie Y X T →
: se numeşte
' $ ( & ' ( ) " 2 " (
dacă:1) ( ) )()()(:, yT xT y xT X y x +=+∈∀ (funcie aditivă)
2) ( ) )()(:, xT xT X x K ⋅=∈∈∀ α α α (funcie omogenă)
7 4 $ ( # ! " $
Condiiile 1) şi 2) din definiie se pot înlocui cu:
( ) )()()(:,,, yT xT y xT K X y x ⋅+⋅=+∈∈∀ β α β α β α
8 $ 5 ) $
1. X X T →: x xT =)( operator identitate pe X
2. [ ] [ ] X R X RT nn 1: −→ ')( P P T = operatorul de derivare

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 9/42

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 10/42
$ % & ' ( " ¢ " # ) ' ( " ( ' ( " " 0
¥ $ 6 " 2 " ! " $
Fie V un spaiu vectorial n - dimensional peste corpul de scalari K şi V V T →: o
aplicaie liniară. Un scalar K ∈λ se numeşte# ) ' ( $ ( ' ( " $
pentru aplicaia liniară T dacă
există cel puin un vector nenul V v∈ astfel încât :
vTv λ = (1)
Vectorul nenul V v∈ care verifică relaia (1) se numeşte# $ % & ' ( ( ' ( " 9
pentru aplicaia liniară
T asociat valorii proprii .λ .
¥ $ & $ ( 5 " 2 ( $ # $ % & ' ( " ) ' ( ¢ " # ) ' ( " ) ' ( ( ' ( " " $ 2 & ( 9 ' ) " % ! " $ ) " 2 " ( ¡
Fie ': V V T → o aplicaie liniară cu matricea aplicaiei T A în baza { }naa B ,...,1= . Relaia (1)
se mai scrie:
0=− vTv λ sau: V nT v E A 0)( =− λ (2)
unde:
=
nnn
n
T
aa
aa
A
Λ
ΜΜΜ
Λ
1
111
,
=
10
01
Λ
ΜΜΜ
Λ
n E şi
=
nv
v
v Μ1
Relaia (2) conduce la sistemul:
=−+++
=++−+
=+++−
0)(...
0...)(
0...)(
2211
2222112
1221111
nnnnn
nn
nn
vavava
vavava
vavava
λ
λ
λ
Λ (3)
Deci coordonatele vectorului propriu v nenul sunt soluiile sistemului omogen (3). Soluiilesistemului omogen (3) nu sunt toate nule, numai dacă determinantul sistemului este nul.
Determinantul sistemului (3) este:

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 11/42
λ
λ
λ
λ
−
−
−
=
nnnn
n
n
aaa
aaa
aaa
P
Λ
ΜΜΜΜ Λ
Λ
21
22212
12111
)(
se numeşte polinomul caracteristic asociat aplicaiei liniare T. Ecuaia 0)( =λ P se numeşte
ecuaie caracteristică a aplicaiei T.
¤ $ ' ( $ 5 ¡
Fie V V T →: , K ∈λ este o valoare proprie a aplicaiei liniare T dacă şi numai dacăeste rădăcină a ecuaiei caracteristice.
7 4 $ ( # ! " "
1. Polinomul caracteristic, deci şi ecuaia caracteristică nu depind de baza aleasă.2. Vectorii proprii asociai aplicaiei liniare V V T →: pentru valorile proprii determinate
se obin înlocuind valorile proprii în sistemul (3) şi rezolvând sistemul. Soluiile
sistemului vor fi coordonatele vectorilor proprii asociai aplicaiei T în raport cu baza B.3. Fiecărei valori proprii λ îi corespund o infinitate de vectori proprii. Sistemul omogen (3)
este compatibil nedeterminat, deoarece 0)( =λ P . Mulimea soluiilor formează unsubspaiu numit subspaiu propriu (spectrul) ataşat valorii proprii respective. Se notează:
{ }vTvV vv E λ λ =−∈= },0{/
4. Un vector propriu v poate fi asociat ca vector propriu unei singure valori proprii asociateaplicaiei liniare T. Observaia se demonstrează presupunând că pentru v, vector propriual lui T )(∃ două valori proprii adică: vTv λ = şi vTv β = , V v 0≠ vv β λ =⇒ sau
( ) ⇒==−⇒=− β λ β λ β λ ,00v presupunerea este fals
( 1 2 " 3 ( $ 4 ! " " ) ' ( # $ % & ' ( " ) $ % 4 ! " " 5 $ & ( " % $ ¢ " 4 ! " " 2 ' ( 5 & $
Fie V spaiu vectorial real

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 12/42
¥ $ 6 " 2 " ! " $
Funcia RV V →×:, se numeşte produs scalar pe mulimea V dacă:
1) x y y x ,, = V y x ∈∀ ,)( (simetrie)
2) y x y x y x x ,,, '' +=+ V y x ∈∀ ,)( (aditivitate în prima variabilă)
3) y x y x ,, ⋅=⋅ α α X x R ∈∈∀ ,)( α (omogenitate în prima variabilă)
4) 0, ≥ x x ,)( X x∈∀ 00, =⇔= x x x
7 4 $ ( # ! " $
Produsul scalar , este liniar şi în a doua variabilă, deci este o funcională biliniară
pozitiv definită.
¥ $ 6 " 2 " ! " $
Se numeşte spaiu euclidian un spaiu pe care s-a definit un produs scalar.
¥ $ 6 " 2 " ! " $
Funcia RV →:. cu x x x ,= se numeşte normă a spaiului euclidian.
( ' ' 3 " ! " $
Norma are următoarele proprietăi:
1) 0> x şi V x x x ∈∀=⇔= )(,00
2) x x ⋅=⋅ α α , V x R ∈∈∀ ,)( α
3) V y x y x y x ∈∀+≤+ ,)(, (inegalitatea triunghiului)
¥ $ 6 " 2 " ! " $
Vectorii x şi y se numesc ortogonali dacă 0, = y x
( ' ' 3 " ! " $
Un sistem de vectori nenuli { }m x x ,...,1 şi ortogonali doi câte doi este liniar independent.
¥ $ 6 " 2 " ! " $

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 13/42
O bază a spaiului V se numeşte ortogonală dacă şi numai dacă vectorii ei sunt ortogonali doi câtedoi.
( ' ' 3 " ! " $
Într-un spaiu finit dimensional V există o bază ortogonală.
( ' % $ £ $ 9 ) § ( 5 5 ¢ % 5 " £ & £ $ ' ( & ' 1 ' 2 ) " 3 ( $ 9 2 $ " 7 3 $ ' ( $ % ( $
Se pleacă de la o bază oarecare a spaiului euclidian { }nbbb B ,...,, 21= şi se vor construi vectorii:
11,2211
12122
11
... −−−−−−=
−=
=
nnnnnnn aaaba
aba
ba
λ λ λ
λ
Λ
Scalarii ijλ se vor determina punând condiia ca oricare doi din vectorii naaa ,...,, 21
să fie ortogonali.
22
233223
11
133113
11
122112
,
,0,
,
,0,
,
,0,
aa
abaa
aa
abaa
aa
abaa
=⇒=
=⇒=
=⇒=
λ
λ
λ
Se obine: j j
ji
ijaa
ab
,
,=λ
¥ $ 6 " 2 " ! " $
O bază a spaiului euclidian V se numeşte ortonormală dacă:
- este o bază ortogonală- norma fiecărui vector este 1
8 $ 5 ) 9

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 14/42
În n R baza canonică este ortonormală.
¤ $ ' ( $ 5 ¡
Într-un spaiu euclidian finit dimensional există o bază ortonormală.
Fie o bază ortogonală { }naaa A ,...,, 21= construită prin procedeul Gramm-Schmidt. Se va
construi o bază ortonormală din baza A prin împărirea fiecărui vector la norma sa.
Se obine baza:
n
nn
a
ac
a
ac
a
ac === ,...,,
2
22
1
11
¥ " 4 & 2 ! 4 ! " 9 5 $ & ( " %
¥ $ 6 " 2 " ! " $
Funcia RV V d →×: , ,),( y x y xd −= V y x ∈∀ ,)( se numeşte distană în V.
Un spaiu vectorial pe care s-a definit o distană se numeşte spaiu metric.
( ' ' 3 " ! " $
Funcia distană are proprietăile:
1) 0),( ≥ y xd şi y x y xd =⇔= 0),(
2) V y x x yd y xd ∈∀= ,)(),,(),(
3) V z y x y z d z xd y xd ∈∀+≤ ,,)(),,(),(),(
£ ¥ ¦ ¢ £ ¤ ¦ © ¦ ¤ ¢ ¦ ¥ ¡ ¡ © © £ © § © ¦ ¢ ¦ © ¡ £ ¦ ©
' ( 5 9 ) ( $ ( ' 7 ) $ 5 $ " £ $ ( ' 1 ( 5 ( $ ) " 2 " ( ¡ ¡ ¡ ¤ ¢ " 5 ' £ $ ) 9 ) 9 " 5 & $ 5 & " %
Modelarea unei probleme cu coninut economic care implică optimizare liniară necesită parcurgerea următoarelor etape:
8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 15/42
1. Identificarea variabilelor modelului, a funciei obiectiv (funcia de eficienă) ce se cereoptimizată, a restriciilor cărora le sunt supuse variabilele modelului şi eventualîntocmirea unui tabel de date;
2. Determinarea modelului matematic asociat problemei de programare liniară (PPL),rezultate;
3. Aducerea PPL la forma standard, cea pentru care este elaborat algoritmul de optimizare a
soluiei primal admisibile de bază;4. Determinarea unei baze admisibile;5. Aplicarea Algoritmului Simplex Primal pentru determinarea programului optim de bază
şi a optimului funciei obiectiv şi verificarea rezultatelor;6. Interpretarea rezultatelor din punct de vedere economic şi luarea deciziei optime în plan
economic.
' ( 5 $ 6 9 2 £ 5 $ 2 & ) $ ) $ ¡ 4 ' ) 9 ! " " % ) 4 " 6 " % ( $ " 2 & $ ( ( $ & ( $ $ % ' 2 ' 5 " % ¡ ¡
O problemă de programare matematică reprezintă determinarea optimului (maximului sauminimului) unei funcii de variabilă vectorială care îndeplineşte anumite condiii (restricii,legături) de tip inecuaii sau ecuaii, precum şi condiii de nenegativitate ale variabilelor funciei.
Dacă toate funciile care intervin în formularea problemei de programare matematică sunt liniareatunci problema se numeşte problemă de programare liniară (PPL). În caz contrar se numeşte problemă de programare neliniară.
1) ' ( 5 4 & 2 £ ( £ ¢
este cea care conine restricii de tip ecuaii( )nn xc xc xcoptimz +++=− ...2211
- restricii de tip egalitate
=+++
=+++
=+++
mnmnmm
nn
nn
d xa xa xa
d xa xa xa
d xa xa xa
...
...
...
2211
22222121
11212111
Λ
- condiii de nenegativitate0,...,0,0 21 ≥≥≥ n x x x
Matricial, forma standard poate fi exprimată astfel:

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 16/42
≥
=
0 X
D AX
X optimC T
unde
)
( )
( )
( )T m
T
n
T
n
nmij
d d d D
cccC
x x x X
a A
,...,,
,...,,
,...,,
21
21
21
=
=
=
=×
7 4 $ ( # ! " "
Se poate ca restriciile de tip inegalitate să fie aduse la forma unor restricii de tip egalitate (adicăcele cerute de forma standard) prin adunarea sau scăderea unui termen numit variabilă ecart sauvariabilă de compensare.
∑===
n
j
T j j X C xc x z
1)( - se numeşte funcie obiectiv (funcia economică)
- spaiul n R al vectorului X, respectiv C – se numeşte spaiul activităilor - vectorul m R D∈ se numeşte vectorul resurselor - spaiul m R se numeşte spaiul resurselor
2) ' ( 5 $ % 2 ' 2 " % $
≥
≥
0
min
X
D AX X C
T
sau
≥
≤
0
max
X
D AX X C
T
O problemă este în formă canonică dacă toate restriciile sunt concordante şi toate variabilele suntnenegative.
Pentru problema de minim, concordante sunt inegalităile cu semnul "."≥
Pentru problema de maxim, concordante sunt inegalităile cu semnul "."≤
¦ ) 1 ' ( " & 5 9 ) " 5 ) $ 8 ( " 5 )

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 17/42
Pentru rezolvarea problemelor de programare liniară s-a impus algoritmul simplex datorat luiG.B. Dantzig (1951).Metoda permite explorarea sistematică a mulimii programelor prin trecereade la un program de bază la alt program de bază “vecin” care este „cel puin la fel de bun” ca programul precedent. Metoda furnizează criterii pentru punerea în evidenă a faptului că problema are optim infinit, precum şi a cazului în care mulimea programelor este vidă.
Fie sistemul de m ecuaii liniare cu n necunoscute:
(1) b Ax = unde .,, nm
nm R x RbM A ∈∈∈ ×
Presupunem rang(A)= .nm ≤ Dacă m=n sistemul (1) are soluia unică ,1b A x −= iar dacă nm <
sistemul are o infinitate de soluii.
Fie B o matrice pătratică formată cu m coloane liniar-independente ale matricii A, numită bază:
( ).,...,1 m j j
aa B =
Notăm: B= { }m j j ,...,1 şi { }.,...,1
_
m j j
B
x x x =
Matricea formată cu coloanele lui A care nu sunt în B va fi notată cu R, iar R { }−= n,...,1 B.
Notăm cu R x vectorul format cu componentele lui x care nu se află în . B x
Componentele lui B x se numesc# ( " 7 " ) $ £ $ 7 3 ¡
, iar componentele lui R x se numesc# ( " 7 " ) $ 4 $ % 9 2 £ ( $ 0
Sistemul (1) devine: b Rx Bx R B =+ de unde se obine forma explicită
(2) R B Rx Bb B x 11 −− −=
O soluie n R x∈ a sistemului (1) se numeşte4 ' ) 9 ! " $ £ $ 7 3 ¡
, dacă pentru componentele sale
diferite de zero corespund coloane liniar independente ale lui A. Deoarece nm Arang <=)( , cel
mult m componente ale unei soluii de bază pot fi nenule. Dacă soluia de bază are exact mcomponente nenule , ea se numeşte
2 $ £ $ 1 $ 2 $ ( & ¡
, în caz contrar – £ $ 1 $ 2 $ ( & ¡ 0
O soluie de bază se poate obine din (2) dacă anulăm variabilele secundare:

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 18/42
(3)
=
= −
0
1
R
B
x
b B x
Această soluie de bază corespunde bazei B formată cu m coloane liniar independente ale lui A.
Se asociază în acest mod la fiecare bază o soluie de bază.
Fie ( ).,...,1 m j j aa B = o bază. Consideră forma explicită a sistemului b Ax = :
(4) R B Rx Bb B x 11 −− −= .
unde R este matricea formată cu coloanele lui A care nu sunt în B.
Fie B={ }m j j ,...,1 şi R { }−= n,...,1 B.
Dacă notăm B xb B =−1 şi ,1,1n j ya B B
j
j ≤≤=⋅− (4) devine:
(5) ∑∈
−= R j
j
B
j
B B x y x x , iar pe componente:
(6) ∑∈
∈−= R j
j
B
ij
B
i
B
i Bi x y x x .,
Soluia de bază corespunzătoare bazei B este dată de:
(7)
=
=
0 R
B B
x
x x
Această soluie de bază este program dacă:
(8) .01 ≥− b B
O bază B care verifică relaia (8) se numeşte7 3 ¡ ( " 5 ) £ 5 " 4 " 7 " ) ¡
.
Funcia obiectiv se poate scrie inând seamă de relaia (2):
( ) RT
R
T
B
T
B
RT
R
BT
B xc R Bcb Bc xc xc z −−=+= −− 11

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 19/42
unde Bc şi Rc sunt vectori coloană având componentele Bici ∈, şi respectiv ., Rici ∈
Notăm cu: .1,, n j yc z xc z B
j
T
B
B
j
BT
B
B ≤≤==
Observăm că B reprezintă valoarea funciei obiectiv pentru soluia de bază
.0, == R B B x x x
Cu notaiile de mai sus funcia z devine:
(9) ( )∑∈
−−= R j
j j
B
j
B xc z z z
La fiecare bază utilizată B corespunde un tabel simplex care are în prima coloană variabilele de
bază (vectorul B x ), în a doua coloană valorile variabilelor de bază (vectorul B
x _ ), iar în
următoarele n coloane, vectorii .1, n j y B j ≤≤ Pe o linie suplimentară se trec funcia obiectiv
xc z T = , valoarea sa în baza B (adică B _
), precum şi cantităile n jc z j
B
j ≤≤− 1, , necesare în
aplicarea algoritmului simplex.
Este util să scriem alături de coloana B x vectorul Bc , iar alături de lista variabilelor
,1, n j x j
≤≤ coeficienii ,1, n jc j
≤≤ din funcia obiectiv.
1c jc nc
V.B. V.V.B.1 x …
j x …n x
Bc B x b B x ⋅= −1 B y1 … j B
j a B y ⋅= −1 … B
n y
z BT
B
xc z = 11
c z B − … j
B
j
T
B j
B
j
c ycc z −=− …n
B
n
c z −
Fie problema de minim sub forma standard:

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 20/42
(10)
≥
=
0
)min(
x
b Ax
xcT
¤ $ ' ( $ 5 ¡
Fie B o bază primal admisibilă. Dacă
(11) ,)(,0 R jc z j
B
j ∈∀≤− atunci programul de bază (7) este o soluie optimă a problemei de
programare liniară (10).
Relaia (11) reprezintă& $ 4 & 9 ) £ $ ' & " 5 ) " & & $
.
¤ $ ' ( $ 5 ¡
Fie B o bază primal admisibilă. Dacă există Rk ∈ astfel încât să avem:
0>− k
B
k c z
şi ,0≤ B
k y atunci problema (10) are optim infinit.
¤ $ ' ( $ 5 ¡
Fie B o bază primal admisibilă. Dacă există Rk ∈ astfel încât să avem:
0>− k
B
k c z
şi B
k y >0 şi dacă Br ∈ se determină din condiia:
(12) ,min0/ B
rk
B
r B
ik
B
i yi y
x
y
x Bik
=
> atunci matricea B~ obinută din B prin înlocuirea coloanei r a cu
coloana k a este o bază primal admisibilă, iar programul B x~
este cel puin la fel de bun ca
programul B x adică .~
B B z z ≤
Relaia (12) reprezintă% ( " & $ ( " 9 ) £ $ " $ ¢ " ( $ £ " 2 7 3 ¡
.

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 21/42
¦ ) 1 ' ( " & 5 9 ) 4 " 5 ) $ 8
4 9 )
Se determină o bază primal admisibilă B, se calculează n jc z y z x j B j
B j
B B ≤≤− 1,,,, şise trece la pasul 2.
4 9 ) ¡
Dacă 0≤− j
B
j c z pentru orice R j∈ , STOP: 0, == R B B x x x este program optim.
Dacă există R j∈ pentru care ,0>− j
B
j c z se determină mulimea
{ }0/ >−∈=+ j
B
j c z R j R şi se trece la pasul 3.
4 9 ) ¢
Dacă există +∈ R j astfel încât să avem ,0≤ B
j y STOP: problema are optim infinit.
Dacă pentru orice +∈ R j avem ,0> B j y determinăm +∈ Rk folosind
% ( " & $ ( " 9 ) £ $ " 2 & ( ( $ ¤ 2
7 3 ¡
: (13) { } k
B
k j
B
j R j
c z c z −=−+∈
max şi apoi indicele Br ∈ cu criteriul de ieşire din bază (12) şi
se trece la pasul 4.
4 9 ) £
Se consideră baza B~
obinută din B prin înlocuirea coloanei r a cu coloana k a , se
calculează n jc z y z x j
B
j
B
j
B B ≤≤− 1,,,,~~~~
şi se trece la pasul 2 înlocuind B cu .~ B
7 4 $ ( # ! " $
În cazul unei probleme de maximizare, numai paşii 2 şi 3 ai algoritmului trebuie modificai:
4 9 ) '2 Dacă 0≥− j
B
j c z pentru orice R j∈ (criteriul de optimalitate pentru problema de
maxim), STOP: 0, == R B B x x x este program optim. Altfel, se determină mulimea
{ }0/ <−∈=− j
B
j c z R j R şi se trece la pasul '3 .
4 9 ) '3 Dacă există −∈ R j astfel încât ,0≤ B
j y STOP: problema are optim infinit. Altfel se
determină −∈ Rk folosind criteriul de intrare în bază (14) { } k
B
k j
B
j R j
c z c z −=−−∈
min şi −∈ Rr
folosind criteriul de ieşire din bază (12) şi se trece la pasul 4.
8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 22/42
' ( 5 9 ) $ ) $ £ $ 4 % " 5 7 ( $ 7 3 $ "
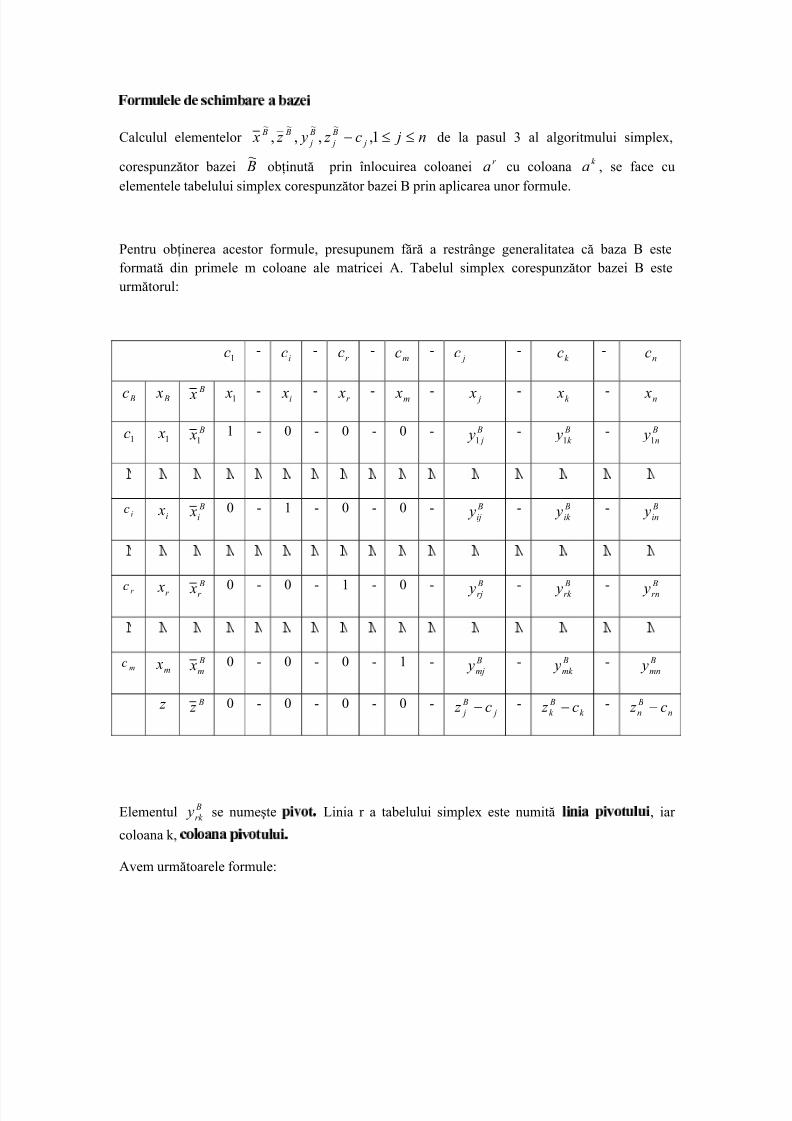
Calculul elementelor n jc z y z x j
B
j
B
j
B B ≤≤− 1,,,,~~~~
de la pasul 3 al algoritmului simplex,
corespunzător bazei B~
obinută prin înlocuirea coloanei r a cu coloana k a , se face cuelementele tabelului simplex corespunzător bazei B prin aplicarea unor formule.
Pentru obinerea acestor formule, presupunem fără a restrânge generalitatea că baza B esteformată din primele m coloane ale matricei A. Tabelul simplex corespunzător bazei B esteurmătorul:
1c -ic -
r c -mc -
jc -k c -
nc
Bc B x B x 1 x - i x - r x - m x - j x - k x - n x
1c 1 x B x1 1 - 0 - 0 - 0 - B
j y1 - B
k y1 - B
n y1
ic i x B
i x 0 - 1 - 0 - 0 - B
ij y - B
ik y - B
in y
r c r x B
r x 0 - 0 - 1 - 0 - B
rj y - B
rk y - B
rn y
mc m x B
m x 0 - 0 - 0 - 1 - B
mj y - B
mk y - B
mn y
z B z 0 - 0 - 0 - 0 - j
B
j c z − -k
B
k c z − -n
B
n c z −
Elementul B
rk y se numeşte " # ' & 0
Linia r a tabelului simplex este numită) " 2 " " # ' & 9 ) 9 "
, iar
coloana k,% ' ) ' 2 " # ' & 9 ) 9 " 0
Avem următoarele formule:

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 23/42
.1,,~~
n j y
y y
y
x x
B
rk
B
rj B
kj B
rk
B
r B
k ≤≤==
{ }k Bi
y
y y y y
y
y x x x
B
rk
B
ik
B
rj B
ij
B
ij B
rk
B
ik
B
r B
i
B
i \~
,;~~
∈−=−= .
( )
( )( )
.1,~
~
n j y
yc z c z c z
y
xc z z z
B
rk
B
rjk
B
k
j
B
j j
B
j
B
rk
B
r k
B
k B B
≤≤−
−−=−
−−=
Formulele de mai sus se numesc formulele de schimbare a bazei şi sunt echivalente cu
următoarele reguli de transformare a tabelului simplex:
a) elementele situate pe linia pivotului se împart la pivot b) elementele situate pe coloana pivotului devin zero, cu excepia pivotului care devine 1c) celelalte elemente ale tabelului simplex se transformă după
( $ 1 9 ) £ ( $ & 9 2 1 " 9 ) 9 "
: dacă
ne imaginăm dreptunghiul a cărui diagonală este determinată de elementul B
ij y care
trebuie transformat şi pivotul B
rk y , atunci noua valoare B
ij y~
se obine împărind la pivot
diferena dintre produsul Brk
Bij y y ⋅ al elementelor de pe diagonala considerată mai sus şi
produsul B
ik
B
rj y y ⋅ al elementelor situate pe cealaltă diagonală a dreptunghiului.
Pentru ultima linie a tabelului se poate aplica aceeaşi regulă a dreptunghiului sau formuleleiniiale.
' ( 5 £ 9 ) ¡ ¡ 0 ¤ $ ' ( $ 5 £ $ £ 9 ) " & & $ ¢ " % ' 2 ! " 2 9 & 9 ) $ % ' 2 ' 5 " % ) # ( " 7 " ) $ ) ' ( £ 9 ) $
Fie modelele de programare liniară (PL):

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 24/42
( )
=≥
=≥
=
∑
∑
=
=
_
1
_
1
,1,0
,1;
min
nk x
mib xa
xc f
k
n
k
ik
i
k
n
k
k k
(1) ⇔
( )
≥
≥
=
0
min
X
b AX
X c f T
( )
=≥
=≤
=
∑
∑
=
=
_
1
_
1
,1,0
,1;
max
mi y
nk c ya
yb g
i
m
i
k i
k
i
m
i
ii
)2( ⇔
( )
≥
≤
=
0
max
Y
c AY
bY g
T T
T
¥ $ 6 " 2 " ! " $
Modelele (1) şi (2) sunt modele de programare liniară (P.L.) aflate în relaia de£ 9 ) " & & $
4 " 5 $ & ( " % ¡
(modelul (1) este dualul modelului (2) şi invers).
9 2 % ! " " ( $ ) $ £ $ 5 " 5 9 ) & $ # ( " 7 " ) $ ( $ ) $
Modelarea activităilor economice este realizată prin funcii de producie, de ofertă, de cost, deconsum, de cerere, de venit care sunt exprimate prin funcii de mai multe variabile reale.
Fie o mulime n R A ⊆ . O funcie R A f →: definită prin R y x x f x f n ∈== ),...,()( 1 se
numeşte funcie reală de variabilă vectorială sau funcie reală de mai multe variabile reale.
8 $ 5 ) 9

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 25/42
Funciile de producie exprimă legătura dintre rezultatul unei activităi de producie P (produs
global, venit naional) şi factorii care determină producia respectivă n x x x ,...,, 21 - materii prime,
mijloace fixe, investiii, fora de muncă etc.
Deci ),...,,( 21 n x x x f P = , R R I f n →⊆:
¥ $ 6 " 2 " ! " $
Fie R R A f n →⊆: şi ),...,( 1 naaa = un punct de acumulare al mulimii de
definiie A. Se spune că Rl ∈ este limita funciei f în punctul a dacă pentru orice 0>ε , există
0)( >ε N astfel încât pentru orice a x ≠ şi )(ε N a x <− avem: ε <− l x x f n ),...,( 1 .
¥ $ 6 " 2 " ! " $
Fie R R A f n →⊆: şi Aaaa n ∈= ),...,( 1 . Funcia f este continuă în punctul a dacă
există şi este finită limita funciei ),...,( 1 n x x f şi pentru a x → avem:
),...,(),...,(lim 11 nna x
aa f x x f =→
¥ $ 6 " 2 " ! " $
Fie R R A f n →⊆: şi . Aa∈ Funcia ),...,( 1 n x x f este derivabilă parial în raport
cu variabila k x dacă există şi este finită limita:
k k
nnk k k
a x
a x
aa f aa xaa f
k k
−
−+−
→
),...,(),...,,,,...,(lim 1111
Această limită se notează ),...,( 1'
n x aa f k
sauk x
a f
∂
∂ )(şi se va numi
£ $ ( " # & ( ! " ) ¡ 6 9 2 % ! " $ " 6
¤ 2 ( ' ( & % 9 % ' 5 ' 2 $ 2 &
k x .
7 4 $ ( # ! " "
1. Din definiie rezultă că, atunci când calculăm derivata în raport cu una din variabile, i x ,
toate celelalte variabile sunt considerate constante.2. Funcia de n variabile reale ),...,( 1 n x x f are n derivate pariale de ordinul întâi:
)(),...,(),( '''
21 x f x f x f
n x x x .

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 26/42
3. Regulile de derivare cunoscute de la funcii de o variabilă rămân valabile. Dacă derivatele
pariale de ordinul întâi sunt la rândul lor derivabile parial, vom avea 2n derivate pariale de ordinul doi ce formează o matrice, care se numeşte
5 & ( " % $ $ 4 4 " 2 ¡ 0
=
)()()(
......... )()...()()(''''''
''''''
21
12111
x f x f x f
x f x f x f x H
nnnn
n
x x x x x x
x x x x x x
7 4 $ ( # ! " $
Pentru derivatele de ordinul doi folosim notaiile:
∂
∂
∂
∂),( y x
x
f
xse notează ),()2(
2 y x f x
sau ),(2
2
y x x
f
∂
∂
∂
∂
∂
∂),( y x
y
f
yse notează ),()2(
2 y x f y
sau ),(2
2
y x y
f
∂
∂
∂
∂
∂
∂),( y x
x
f
yse notează ),()2( y x f xy sau ),(
2
y x x y
f
∂∂
∂
∂∂
∂∂ ),( y x
y f
xse notează ),()2( y x f yx sau ),(
2
y x y x f ∂∂
∂
( ' ( " $ & & $
Funciile reale de mai multe variabile reale care admit derivate pariale de ordinul doi continue în
. Aa∈ au derivatele pariale mixte egale. Deci: )()( '''' a f a f i j ji x x x x = , ji ≠
Difereniala unei funcii ),...,()( 1 n x x f x f = în punctul ),...,( 1 naaa = se va calcula astfel:
nn xn xn dx x x f dx x x f x xdf n
),...,(...),...,(),...,( 1'
11'
1 1++=

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 27/42
Difereniala de ordinul n a funciei f este:
n
n
nn
n
n
n
nn
n
n
n
n
n
n
n
nnn
dy y
f C dydx
y x
f C
dydx y x
f C dx
x
f f dy
ydx
x f d
)()(
...)()(
11
1
11
1)(
∂
∂+
∂∂
∂+
+∂∂
∂+∂∂=
∂∂+
∂∂=
−
−
−
−
−
2 & $ ( ( $ & ( $ $ % ' 2 ' 5 " % ¡ £ $ ( " # & $ ) ' ( ( ! " ) $
Derivata parială a unei funcii ),...,( 1 n x x f arată variaia funciei la o creştere i x∆ a variabilei
i x .
Pentru funciile de producie ),...,,( 21 n x x x f P = unde n x x x ,...,, 21 sunt factorii care determină
producia respectivă, derivatele pariale determină eficiena utilizării unei unităi suplimentare a
factorului i x , atunci când ceilali factori rămân neschimbai şi se numesc( 2 £ 5 $ 2 & $
5 ( 1 " 2 ) $
.
Dacă notăm cu Y-venitul naional sau producia în unităi fizice sau produsul social total
L-fora de muncă utilizată sau fondul de salarii sau numărul de muncitori
K-capitalul utilizat sau fondurile fixe se poate scrie funcia
0 ' 7 7 ¢ 0 ¥ ' 9 1 ) 4
prin: ba K L AY ⋅⋅= unde:
A- constantă pozitivă, factor de proporionalitate, iar a,b sunt coeficienii de elasticitate
Să calculăm pentru ba K L AY ⋅⋅= randamentele marginale:
1'
1'
),(
),(−
−
⋅⋅⋅=
⋅⋅⋅=ba
K
ba
L
K Lb A K LY
K La A K LY

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 28/42
Difereniala funciei de producie exprimă efectul modificărilor variabilelor.
Difereniala de ordinul întâi a funciei de producie este:
YdK K
bYdL
L
adK Y dLY dY K L +=+= '' - exprimă variaia absolută a produciei
Variaia relativăY
dY exprimată prin:
K
dK b
L
dLa
Y
dY ⋅+⋅= este o combinaie liniară a variaiilor relative ale forei de muncă şi ale
capitalului.
Dacă ⇒= 0dL L este constant şi din dY se poate obine coeficientul:
K
dK
Y
dY b := ca raport între variaia relativă a produciei şi variaia relativă a capitalului
Analog dacă 0=dK se obine L
dL
Y
dY a :=
8 & ( $ 5 $ ) $ 6 9 2 % ! " " ) ' ( £ $ 5 " 5 9 ) & $ # ( " 7 " ) $
Fie R R A f n →⊆: şi ( ) Aaaa n ∈= ,...,1
¥ $ 6 " 2 " ! " $
Punctul a este un 9 2 % & £ $ 5 8 " 5 ) ' % )
dacă )()( a f x f ≤ pentru orice x ce aparine
unei vecinătăi a lui a, ., AV V x aa ∈∈
Punctul a este un 9 2 % & £ $ 5 " 2 " 5 ) ' % )
dacă )()( a f x f ≥ pentru orice x ce aparine unei
vecinătăi a lui a, ., AV V x aa ∈∈

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 29/42
7 4 $ ( # ! " $
La fel ca pentru funciile de o variabilă, dacă există puncte de extrem, atunciderivatele pariale de ordinul întâi în aceste puncte sunt nule, adică
0)(,...,0)(,0)( '''
21=== a f a f a f
n x x x
¥ $ 6 " 2 " ! " $
Un punct a pentru care derivatele pariale se anulează se numeşte 9 2 % & 4 & ! " ' 2 ( 0
7 4 $ ( # ! " $
Nu orice punct staionar este şi punct de extrem pentru funcie.
Condiiile suficiente ca un punct staionar să fie punct de extrem local sunt date de următoareateoremă:
¤ $ ' ( $ 5 ¡
Fie R R A f n
→⊆: şi Aa∈ un punct staionar. Punctul a este un punct de minimlocal al funciei dacă matricea hessiană, simetrică este pozitiv definită adică:
=
)()()(
)()()(
)()()(
)(
"""
"""
"""
21
22212
12111
a f a f a f
a f a f a f
a f a f a f
a H
nnnn
n
n
x x x x x x
x x x x x x
x x x x x x
Λ
ΛΛΛΛ
Λ
Λ
are minorii:
Λ
0)()(
)()(
0)(
""
""
2
"1
2212
2111
11
>=∆
>=∆
a f a f
a f a f
a f
x x x x
x x x x
x x
0
)()(
)()(
""
""
1
111
>=∆
a f a f
a f a f
nnn
n
x x x x
x x x x
n
Λ
ΛΛΛ
Λ

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 30/42
deci toi minorii hessiani sunt pozitivi în punctul a.
Punctul a va fi un punct de maxim local dacă:
0)1(,...,0,0,0 321 >−∆<∆>∆<∆ nn
7 4 $ ( # ! " $
Dacă 02 =∆ , nu putem preciza natura punctului staionar a prin această metodă.
Este necesar să se determine semnul formei pătratice a diferenialei de ordinul doi a funciei în
punctul a, ).(2 a f d
8 & ( $ 5 $ ) $ 6 9 2 % ! " " ) ' ( £ $ 5 " 5 9 ) & $ # ( " 7 " ) $ % ' 2 £ " ! " ' 2 & $
Dacă se cere să se determine extremele funciei ),...,,( 21 p x x x f y = în care variabilele
p x x x ,...,, 21 sunt supuse unor legături de forma:
,...,0),...,,( 211 = p x x xϕ 0),...,,( 21 = pq x x xϕ , q <
Se construieşte funcia lui Lagrange:
),...,,(...),...,,(),...,,(),...,,( 2121112121 pqq p p p x x x x x x x x x f x x x L ϕ λ ϕ λ +++= unde
qλ λ λ ,...,, 21 sunt multiplicatorii lui Lagrange.
Se formează apoi sistemul de q p + ecuaii:
0),...,,(
0),...,,(
0),...,,;,...,,(
21
211
2121
=
=
=
pq
p
q p
x x x
x x x
x x xdL
ϕ
ϕ
λ λ λ
Μcu q p + necunoscute q p x x x λ λ λ ,...,,,,...,, 2121
O condiie suficientă de extrem este ca: ),...,,( 212
p x x x Ld să păstreze semn constant.
Dacă Ld 2 este pozitiv definită, atunci funcia f are un punct de minim, iar dacă Ld 2 estenegativ definită, funcia f are un punct de maxim condiionat.

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 31/42
2 & $ 1 ( ) $ £ 9 7 ) $
Noiunea de integrală Riemann a unei funcii de o variabilă reală se poate generaliza pentrufuncii de două sau mai multe variabile.
Fie un domeniu D închis şi mărginit, deci domeniu ce poate fi mărginit de un interval
bidimensional [ ] [ ]d cba I ,, ×= care poate fi împărit la rândul său în nm ⋅ intervale
[ ] j jiiij y y x x ,, 11 −− ×=∆ cu ni ,...,1= şi m j ,...,1= .
Definim norma diviziunii astfel: ( ){ }11;max −− −−=∆ j jii y y x x
¥ $ 6 " 2 " ! " $
O funcie R R D f →⊂ 2: mărginită pe D este funcie integrabilă Riemann pe
domeniul D dacă există un număr real I cu proprietatea 0)( >∀ ε , există 0)( >ε N astfel încât
pentru orice diviziune ∆ a domeniului D cu )(ε N <∆ să avem ε σ <−∆ I f )( pentru orice
punct ijijijij y xM ∆∈),( şi sumă Riemann ∑∑= =
∆ =n
i
m
j
ijij y x f 1 1
),(σ
Numărul I se numeşte integrala funciei f pe domeniul D, care se notează ∫∫ = D
dxdy y x f I ),(
7 4 $ ( # ! " $
Calculul integralei duble se reduce la calculul unei inegrale simple.
a) Dacă 2 R D ⊂ este un domeniu simplu în raport cu axa Ox şi cu axa Oy, deci undreptunghi cu laturile paralele cu axele de coordonate, b xa ≤≤ şi d yc ≤≤ atunci:
dydx y x f dxdy y x f dxdy y x f d
c
b
a D
b
a
d
c
∫ ∫ ∫∫ ∫ ∫
=
= ),(),(),(
b) Dacă 2 R D ⊂ este un domeniu simplu în raport cu una din axe, de exemplu cu axa Oy;adică există [ ] Rba x y x y →,:)(),( 21 continue pe [ ]ba, şi )()( 21 x y x y ≤ atunci
( ) [ ]{ })()(,/, 212 x y y x yba x R y x D ≤≤∈∈= şi:

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 32/42
dxdy y x f dxdy y x f b
a
x y
x y D
∫ ∫ ∫∫
=
)(
)(
2
1
),(),(
c) Dacă f este funcie continuă pe xoy D ⊂ şi dacă există două funcii ),(1 vu f x = şi
),(2 vu f y = care admit derivate pariale de ordinul întâi continue cu determinantulfuncional:
0),(
),(
22
11
≠
∂
∂
∂
∂∂
∂
∂
∂
=
v
f
u
f v
f
u
f
vu D
y x Dpentru ( ) 1, Dvu ∈ atunci:
∫∫ ∫∫ =1
),(),()).,(),,((),( 21
D D
dudvvu D y x Dvu f vu f f dxdy y x f
Acest caz presupune schimbarea de variabile.
2 & $ 1 ( ) $ " 5 ( ' ( " " ¡ 1 $ 2 $ ( ) " 3 & $ ¤
Noiunea de integrală Riemann ∫
b
a
dx x f )( s-a studiat pe un interval [ ]ba, compact, adică a,b sunt
finite, iar funcia )( x f este mărginită pe acest interval.
Există probleme care conduc la extinderea noiunii de integrală definită la integrală în care unulsau ambele numere a,b sunt infinite.
∫ ∫ ∫ ∞
∞−∞−
dx x f dx x f dx x f bb
a
)(,)(,)(
Fie o funcie Ra f →∞),[: , integrabilă pe [ ]ba, pentru orice ab > . Dacă există şi este finită
limita integralei pe [ ]ba, , atunci integrala pe ),[ ∞a este convergentă şi este egală cu această
limită. Adică: ∫ ∫ ∞
∞→=a
b
ab
dx x f dx x f )()(lim

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 33/42
Dacă limita nu există sau nu este finită, spunem că integrala este divergentă.
Analog:
∫ ∫ ∞−
−∞→=
bb
aa
dx x f dx x f )()(lim şi
∫ ∫ +∞
∞−∞→−∞→
= dx x f dx x f b
aba
)()(lim
2 & $ 1 ( ) $ $ 9 ) $ ( " $ 2 $
¥ $ 6 " 2 " ! " $
Se numeşte funcie Gama, integrala:
dxe x p x p
∫ ∞
−−=Γ0
1)(
Această integrală este convergentă pentru orice parametru .0> p
( ' ( " $ & ¡ ! "
1) 0),()1( >Γ⋅=+Γ p p p p - reprezintă relaia de recurenă a funciei Γ
2) N nnn ∈=+Γ ,!)1(
3) 1)1( =Γ
4) π =
Γ
21
¥ $ 6 " 2 " ! " $
Se numeşte funcie Beta, integrala:

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 34/42
0,0,)1(),(1
0
11 >>−= ∫ −− q pdx x xq p q p β
Integrala beta este convergentă pentru orice parametri p şi q strict pozitivi.
( ' ( " $ & ¡ ! "
1) ),(),( pqq p β β =
2))(
)()(),(
q p
q pq p
+Γ
Γ⋅Γ= β
3) Π=
21,21
β
4) ),())(1(
)1,1( q pq pq p
pqq p β β ⋅
+++=++
5) Dacă 10,1 <<−= p pq avem:)sin(
)1()(Π⋅
Π=−Γ⋅Γ
p p p (
6 ' ( 5 9 ) % ' 5 ) $ 5 $ 2 & $ ) ' (
)
7 4 $ ( # ! " $
Aceste integrale ne ajută să calculăm convergena multor integrale improprii.
Cu ajutorul lor se definesc o serie de variabile aleatoare din teoria probabilităilor.
¤ " 9 ( " ( " 2 % " ) $ £ $ $ % 9 ! " " £ " 6 $ ( $ 2 ! " ) $ % 9 ) " % ! " " ¤ 2 $ % ' 2 ' 5 " $
Multe modele matematice din economie, mecanică, fizică exprimate cu ajutorul funciilor şi alderivatelor au condus la necesitatea studierii ecuaiilor difereniale. Modele ale economiei de piaă sunt exprimate prin ecuaii difereniale, adică necesită determinarea unei funcii care segăseşte într-o ecuaie ce conine şi derivate ale funciei.

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 35/42
Fie F o funcie definită pe un domeniu D, din ,2+n R cu valori reale, continuă în acest domeniu.
¥ $ 6 " 2 " ! " $
O relaie de forma
0),...,,,( )(' =n y y y x F (1)
se numeşte$ % 9 ! " $ £ " 6 $ ( $ 2 ! " ) ¡ £ $ ' ( £ " 2 9 ) 2
.
Fie ( ) Rba →,:ϕ o funcie derivabilă de n ori în orice punct al intervalului ( )ba, , unde a poate
fi ∞− , iar b poate fi ∞+
¥ $ 6 " 2 " ! " $
Se spune că funcia ϕ este4 ' ) 9 ! " $
a ecuaiei difereniale (1), dacă înlocuind în ecuaiadiferenială (1), funcia cu )( xϕ , se obine o identitate, oricare ar fi ( ),,ba x∈ adică
0))(),...,(),(,( )(' = x x x x F nϕ ϕ ϕ
Dacă în sistemul de coordonate xOy se reprezintă grafic funcia ϕ , se obine o curbă de ecuaie
)( x y ϕ = numită şi% 9 ( 7 ¡ " 2 & $ 1 ( ) ¡
a ecuaiei (1).
În unele cazuri, în locul soluiilor )( x y ϕ = se găsesc soluii de forma 0),( = y xG care definesc
soluii implicite cu depinzând de x , iar curbele pe care se definesc se numesc curbe integrale.
Dacă funcia F, ce intră în definiia ecuaiei difereniale (1) , îndeplineşte condiii suficiente
pentru a putea scoate din ecuaia 0),...,,,( )(' =n y y y x F pe )(n y ca funcie de celelalte variabile,
adică
),...,,,()1(')( −
=
nn
y y y x f y (2)
unde R R D f n →⊆ +1: este o funcie de 1+n variabile, definită pe domeniul D, cu valori reale
şi continuă în acest domeniu.
8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 36/42
Ecuaia se numeşte tot ecuaie diferenială de ordinul n , dar are o formă particulară faă de
ecuaia (1), deoarece conine pe )(n y , explicitat în raport cu )1(' ,...,,, −n y y y x .
( ' 7 ) $ 5 ) 9 " 9 %
pentru ecuaia diferenială de ordinul n, de forma (2), constă îndeterminarea soluiei ecuaiei, care satisface condiiile iniiale:
100
)1('00
'00 )(,...,)(,)( −− === nn y x y y x y y x y , unde 1)1(' ),...,,,( +− ⊆∈ nn R D y y y x este un
punct constant.
¥ $ 6 " 2 " ! " $
Prin soluie generală a ecuaiei diferniale (2) se înelege o soluie
),...,,,( 21 nccc x y ϕ = a ei ce depinde şi de n constante nccc ,...,, 21 , considerate ca parametri
reali şi cu ajutorul căreia se poate rezolva o problemă Cauchy pentru orice punct din domeniul D.
În cele ce urmează prezentăm câteva tipuri de ecuaii difereniale de ordinul întâi integrabile prinmetode elementare
% 9 ! " " £ " 6 $ ( $ 2 ! " ) $ % 9 # ( " 7 " ) $ 4 $ ( 7 " ) $
Aceste ecuaii sunt de forma:
)()(' y g x f y ⋅= cu 0)( ≠ y g
Dacă vom scrie derivatadx
dy y =' , atunci ecuaia se va putea scrie separând variabila x de y:
dx x f y g
dy y g x f
dx
dy)(
)()()( =⇒⋅=
Soluia generală a ecuaiei se obine integrând membru cu membru ecuaia:
∫ ∫ += C dx x f y g
dy)(
)(
% 9 ! " " ' 5 ' 1 $ 2 $

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 37/42
Sunt ecuaii de forma:
),( y x f dx
dy= (3)
unde f este o funcie omogenă de gradul zero, adică satisface condiia:
),(),( y x f tytx f = ,oricare ar fi t, astfel încât ( )tytx, să fie în domeniul de definiie al funciei f.
Punând x
t 1
= , se obine
=
=
x
y
x
y f y x f ϕ ,1),( de unde rezultă că ecuaia diferenială (3)
este de forma:
=
x
y
dx
dyϕ (4)
Cu schimbarea de funcie y
u = sau ux y = , derivând se obine:dx
du xu
dx
dy+= şi deci ecuaia
(4) se transformă în )(udx
du xu ϕ =+ , ecuaie cu variabile separabile
% 9 ! " " ) " 2 " ( $ £ $ ' ( £ " 2 9 ) ¤ 2 & "
Forma generală a acestor ecuaii este
0)()()( ' =++ xC y x B y x A (5)
Presupunem că funciile A,B,C sunt definite şi continue pe un interval ( )ba, şi că 0)( ≠ x A în
orice punct al acestui interval. Dacă împărim ecuaia (5) prin )( x A obinem:
)()(' xQ y x P y =+ (6)

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 38/42
unde)(
)()(
x A
x B x P = şi
)(
)()(
x A
xC xQ −=
Ecuaia 0)('
=+ y x P y (7)
se numeşte ecuaie liniară omogenă
7 4 $ ( # ! " $
Omogenitatea ecuaiei (7) se referă la absena termenului )( xQ din membrul stâng al ecuaiei (6).
Ecuaia (7) este o ecuaie cu variabile separabile deci: y x P dx
dy)(−= sau dx x P
y
dy)(−=
Integrând fiecare membru avem: ∫ −=+ dx x P c y )(lnln 1 sau ∫ −= dx x P c y )(ln 1
Notăm cc
=±1
1şi soluia generală este: ∫ =
− dx x P ce y
)((8)
Pentru ecuaia (6), se caută o soluie de forma (8), unde c este considerată o funcie de x. Aceastămetodă este cunoscută sub numele de
5 $ & ' £ # ( " ! " $ " % ' 2 4 & 2 & $ " 0
Derivând relaia (8), obinem:
∫ +∫ −=−− dx x P dx x P e xce x P xc y
)(')(' )()()( şi înlocuind în (6), rezultă
)()()()()()()()(')(
xQe x P xce xce x P xcdx x P dx x P dx x P
=∫ +∫ +∫ −−−−
de unde

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 39/42

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 40/42

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 41/42

8/9/2019 teste matematici
http://slidepdf.com/reader/full/teste-matematici 42/42







