
© Copyright 2018 Xilinx
Coding Considerations
© Copyright 2018 Xilinx
Objectives
˃ After completing this module, you will be able to:
List language support in Vivado HLS
State when a construct is not synthesizable
List unsupported constructs
Describe multi-access pointer and restriction imposed on using it
Describe how structs and pointers are handled in Vivado HLS
Generate efficient hardware from C sources using stream and shift register classes
List supported functions in OpenCV library
Coding Considerations 23- 2

© Copyright 2018 Xilinx
Outline
˃ Language Support
˃Pointers
˃Coding Considerations and IO
˃Streams
˃ Libraries Support FFT, FIR, Shift Registers and Linear Algebra
OpenCV
˃Summary
© Copyright 2018 Xilinx
Comprehensive C Support
˃ A Complete C Validation & Verification Environment
Vivado HLS supports complete bit-accurate validation of the C model
Vivado HLS provides a productive C-RTL co-simulation verification solution
˃ Vivado HLS supports C, C++ and SystemC
Functions can be written in any version of C
Wide support for coding constructs in all three variants of C
‒ It’s easier to discuss what’s not supported than what is
˃ Modeling with bit-accuracy
Supports arbitrary precision types for all input languages
Allowing the exact bit-widths to be modeled and synthesized
˃ Floating point support
Support for the use of float and double in the code
Coding Considerations 23- 4
© Copyright 2018 Xilinx
Comprehensive C Support
˃ Pointers based applications
Multi-access pointer issues and streams
˃ Streaming and shift registering applications
Generate efficient hardware from C sources using stream and shift register classes
˃ Support for OpenCV functions
Enable migration of OpenCV designs into Xilinx FPGA
Libraries target real-time full HD video processing
Coding Considerations 23- 5
© Copyright 2018 Xilinx
C, C++ and SystemC Support
˃ The vast majority of C, C++ and SystemC is supported
Provided it is statically defined at compile time
The C constructs must be of a fixed or bounded size and must be unamiguous
If it’s not defined until run time, it won’t be synthesizable
System calls to OS are not synthesizable
˃ Any of the three variants of C can be used
If C is used, Vivado HLS expects the file extensions to be .c
For C++ and SystemC it expects file extensions .cpp
˃ Let’s look at an example using a FIR
Single data input x
Coefficients are stored in a ROM
A single output: function return
Coding Considerations 23- 6
© Copyright 2018 Xilinx
FIR Filter with C
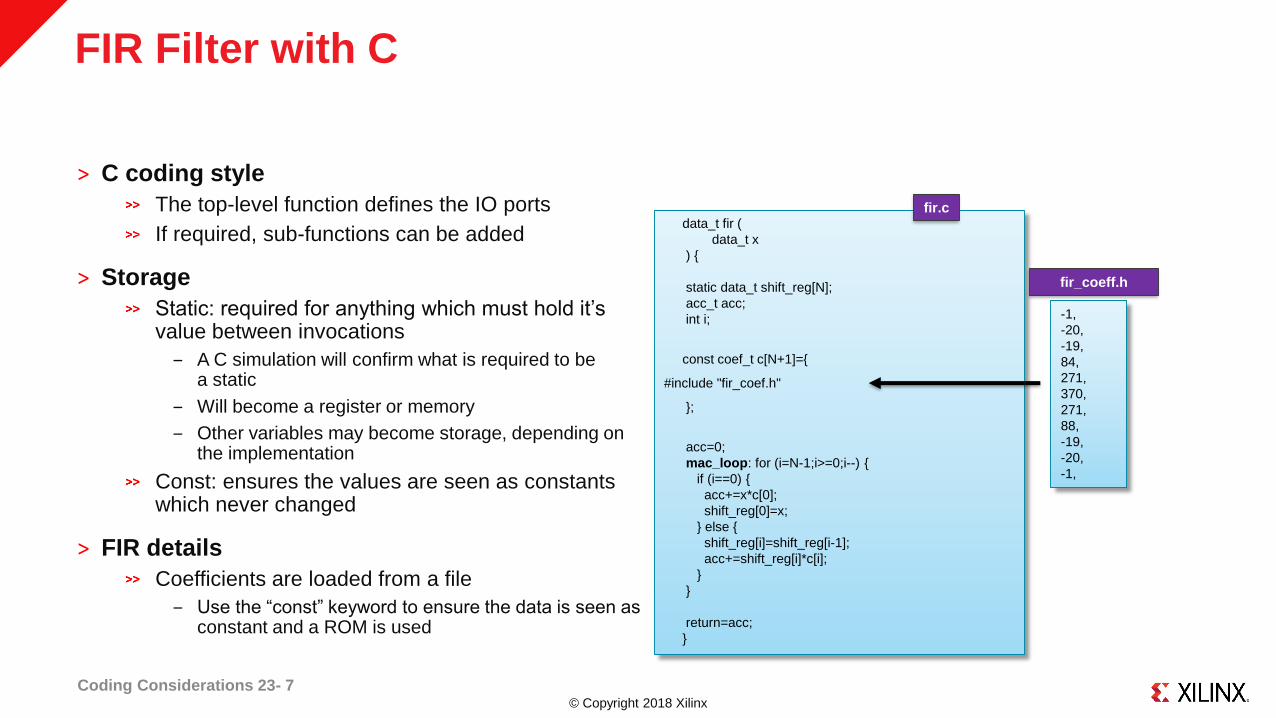
˃ C coding style
The top-level function defines the IO ports
If required, sub-functions can be added
˃ Storage
Static: required for anything which must hold it’s value between invocations
‒ A C simulation will confirm what is required to be a static
‒ Will become a register or memory
‒ Other variables may become storage, depending on the implementation
Const: ensures the values are seen as constants which never changed
˃ FIR details
Coefficients are loaded from a file
‒ Use the “const” keyword to ensure the data is seen as constant and a ROM is used
Coding Considerations 23- 7
data_t fir (
data_t x
) {
static data_t shift_reg[N];
acc_t acc;
int i;
const coef_t c[N+1]={
#include "fir_coef.h"
};
acc=0;
mac_loop: for (i=N-1;i>=0;i--) {
if (i==0) {
acc+=x*c[0];
shift_reg[0]=x;
} else {
shift_reg[i]=shift_reg[i-1];
acc+=shift_reg[i]*c[i];
}
}
return=acc;
}
fir.c
-1,
-20,
-19,
84,
271,
370,
271,
88,
-19,
-20,
-1,
fir_coeff.h
© Copyright 2018 Xilinx
Arrays to RAMs : Initialization
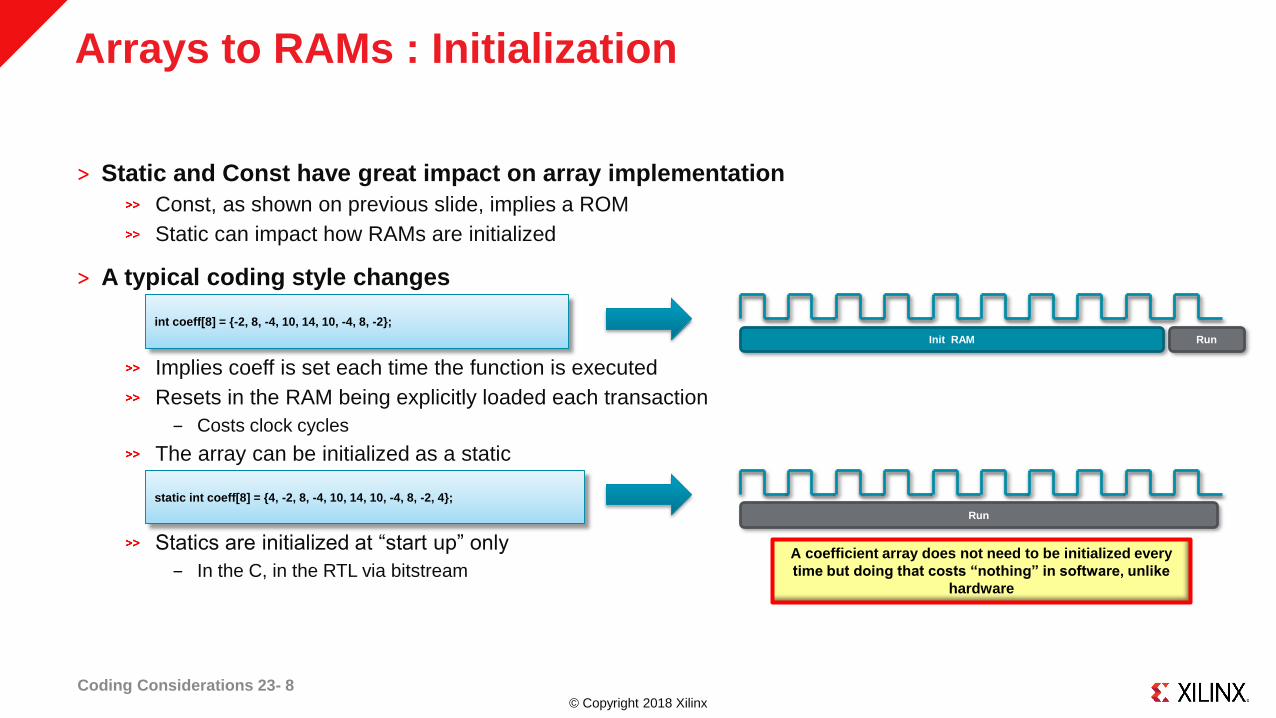
˃ Static and Const have great impact on array implementation
Const, as shown on previous slide, implies a ROM
Static can impact how RAMs are initialized
˃ A typical coding style changes
Implies coeff is set each time the function is executed
Resets in the RAM being explicitly loaded each transaction
‒ Costs clock cycles
The array can be initialized as a static
Statics are initialized at “start up” only
‒ In the C, in the RTL via bitstream
Coding Considerations 23- 8
int coeff[8] = {-2, 8, -4, 10, 14, 10, -4, 8, -2};
RunInit RAM
static int coeff[8] = {4, -2, 8, -4, 10, 14, 10, -4, 8, -2, 4};
Run
A coefficient array does not need to be initialized every
time but doing that costs “nothing” in software, unlike
hardware
© Copyright 2018 Xilinx
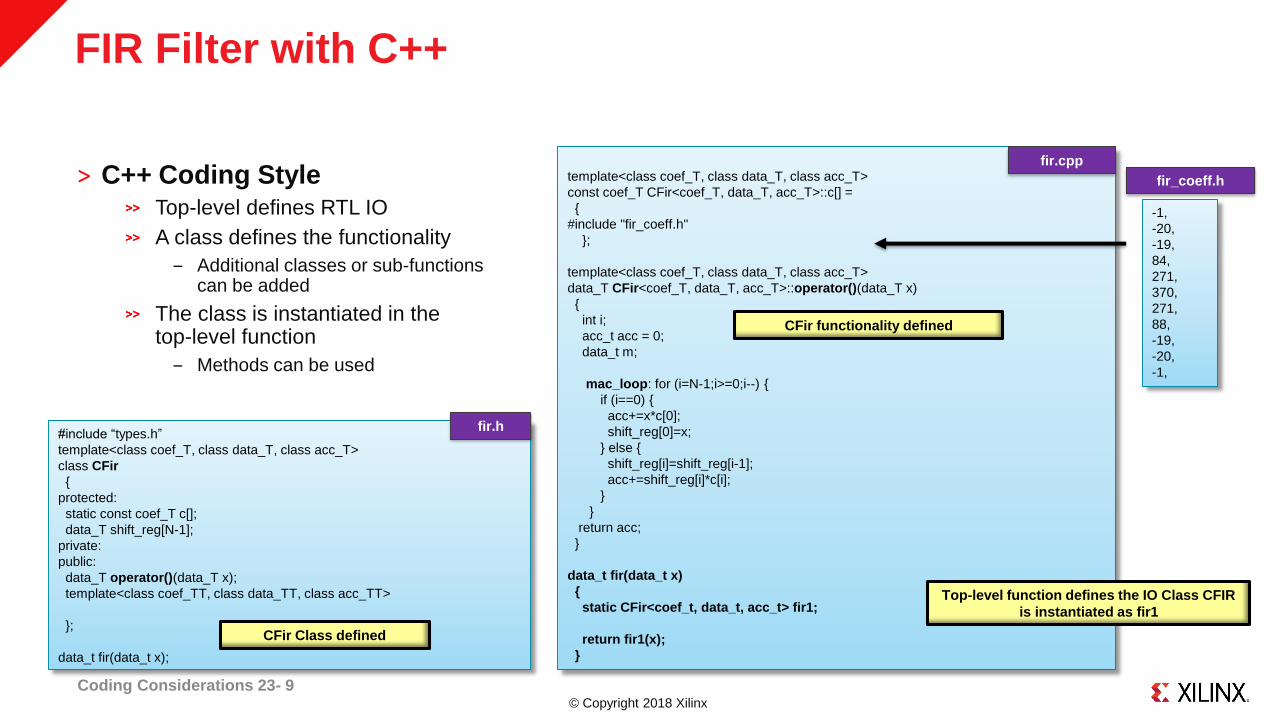
FIR Filter with C++
˃ C++ Coding StyleTop-level defines RTL IO
A class defines the functionality
‒ Additional classes or sub-functions can be added
The class is instantiated in the top-level function
‒ Methods can be used
Coding Considerations 23- 9
#include “types.h”
template<class coef_T, class data_T, class acc_T>
class CFir
{
protected:
static const coef_T c[];
data_T shift_reg[N-1];
private:
public:
data_T operator()(data_T x);
template<class coef_TT, class data_TT, class acc_TT>
};
data_t fir(data_t x);
fir.h
CFir Class defined
template<class coef_T, class data_T, class acc_T>
const coef_T CFir<coef_T, data_T, acc_T>::c[] =
{
#include "fir_coeff.h"
};
template<class coef_T, class data_T, class acc_T>
data_T CFir<coef_T, data_T, acc_T>::operator()(data_T x)
{
int i;
acc_t acc = 0;
data_t m;
mac_loop: for (i=N-1;i>=0;i--) {
if (i==0) {
acc+=x*c[0];
shift_reg[0]=x;
} else {
shift_reg[i]=shift_reg[i-1];
acc+=shift_reg[i]*c[i];
}
}
return acc;
}
data_t fir(data_t x)
{
static CFir<coef_t, data_t, acc_t> fir1;
return fir1(x);
}
-1,
-20,
-19,
84,
271,
370,
271,
88,
-19,
-20,
-1,
fir.cpp
fir_coeff.h
Top-level function defines the IO Class CFIR
is instantiated as fir1
CFir functionality defined
© Copyright 2018 Xilinx
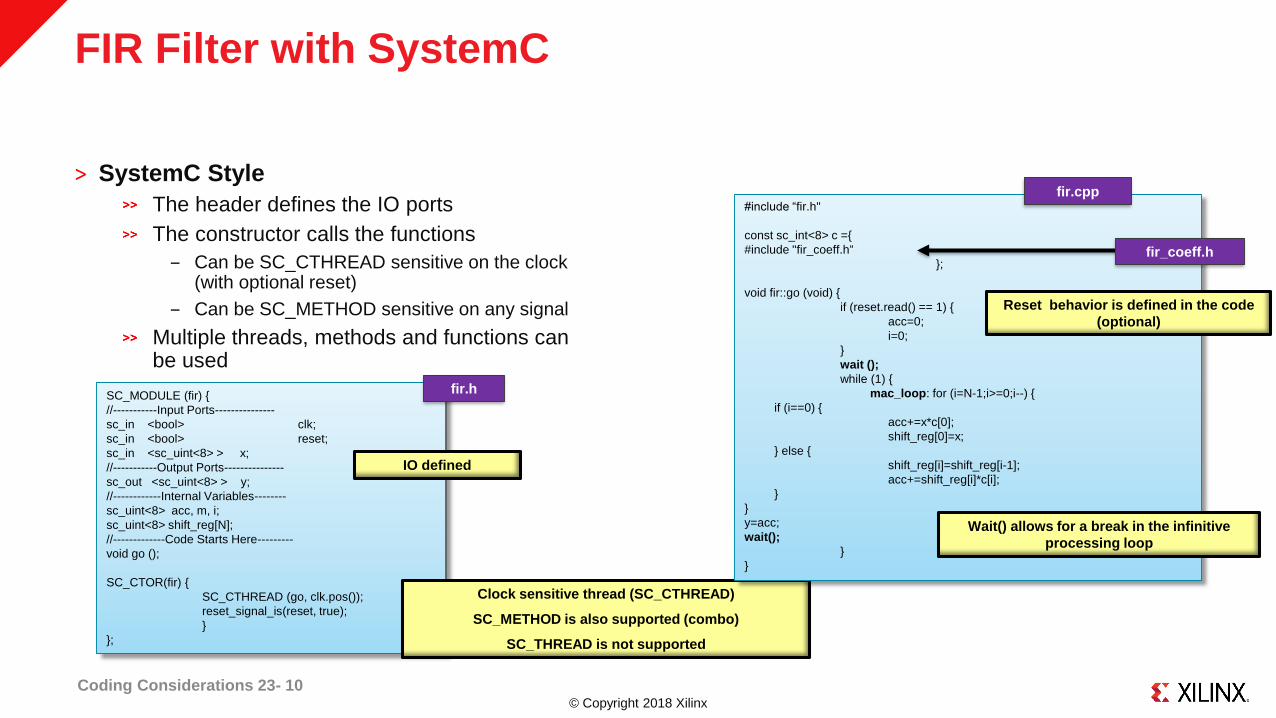
FIR Filter with SystemC
˃ SystemC Style
The header defines the IO ports
The constructor calls the functions
‒ Can be SC_CTHREAD sensitive on the clock (with optional reset)
‒ Can be SC_METHOD sensitive on any signal
Multiple threads, methods and functions can be used
Coding Considerations 23- 10
SC_MODULE (fir) {
//-----------Input Ports---------------
sc_in <bool> clk;
sc_in <bool> reset;
sc_in <sc_uint<8> > x;
//-----------Output Ports---------------
sc_out <sc_uint<8> > y;
//------------Internal Variables--------
sc_uint<8> acc, m, i;
sc_uint<8> shift_reg[N];
//-------------Code Starts Here---------
void go ();
SC_CTOR(fir) {
SC_CTHREAD (go, clk.pos());
reset_signal_is(reset, true);
}
};
fir.h
IO defined
Clock sensitive thread (SC_CTHREAD)
SC_METHOD is also supported (combo)
SC_THREAD is not supported
#include “fir.h"
const sc_int<8> c ={
#include "fir_coeff.h“
};
void fir::go (void) {
if (reset.read() == 1) {
acc=0;
i=0;
}
wait ();
while (1) {
mac_loop: for (i=N-1;i>=0;i--) {
if (i==0) {
acc+=x*c[0];
shift_reg[0]=x;
} else {
shift_reg[i]=shift_reg[i-1];
acc+=shift_reg[i]*c[i];
}
}
y=acc;
wait();
}
}
Reset behavior is defined in the code
(optional)
fir.cpp
Wait() allows for a break in the infinitive
processing loop
fir_coeff.h
© Copyright 2018 Xilinx
Unsupported Constructs: Overview
˃ System calls and function pointersDynamic memory allocation‒ malloc() & free()
Standard I/0 and file I/O operations‒ fprintf() / fscanf() etc.
System calls‒ time(), sleep() etc.
˃ Data typesForward declared typeRecursive type definitions‒ Type contains members with the same type
˃ Non-standard PointersPointer casting between general data types‒ OK with native integers types
If a double pointer is used in multiple functions, Vivado HLS will inline all the functions ‒ Slower synthesis, may increase area & run time
Coding Considerations 23- 11
© Copyright 2018 Xilinx
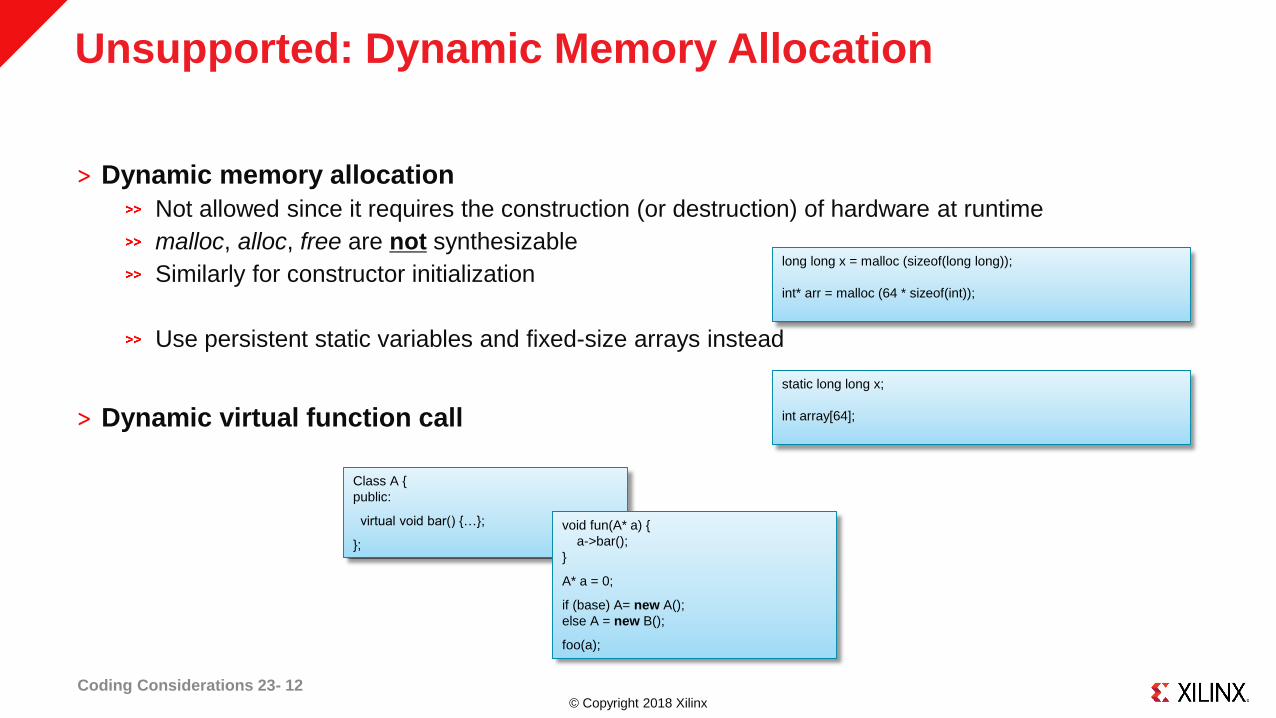
Unsupported: Dynamic Memory Allocation
˃ Dynamic memory allocation
Not allowed since it requires the construction (or destruction) of hardware at runtime
malloc, alloc, free are not synthesizable
Similarly for constructor initialization
Use persistent static variables and fixed-size arrays instead
˃ Dynamic virtual function call
Coding Considerations 23- 12
long long x = malloc (sizeof(long long));
int* arr = malloc (64 * sizeof(int));
static long long x;
int array[64];
Class A {
public:
virtual void bar() {…};
};
void fun(A* a) {
a->bar();
}
A* a = 0;
if (base) A= new A();
else A = new B();
foo(a);
© Copyright 2018 Xilinx
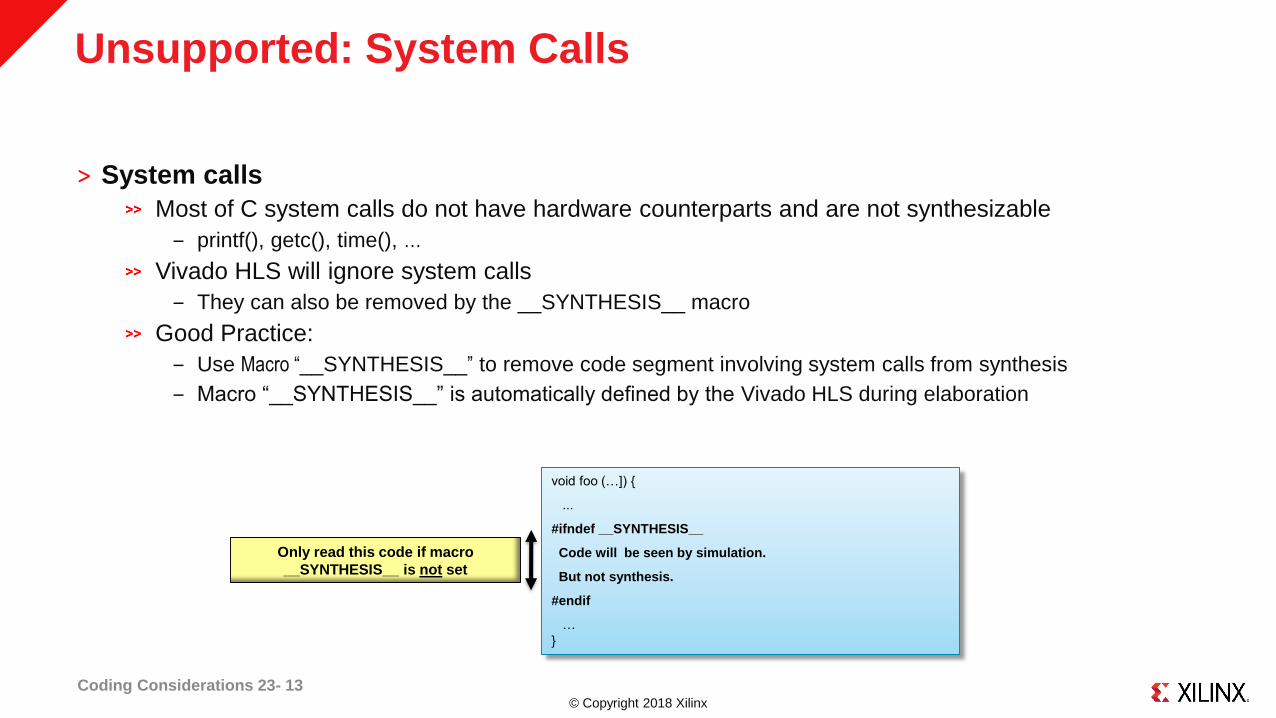
Unsupported: System Calls
˃ System calls
Most of C system calls do not have hardware counterparts and are not synthesizable
‒ printf(), getc(), time(), …
Vivado HLS will ignore system calls
‒ They can also be removed by the __SYNTHESIS__ macro
Good Practice:
‒ Use Macro “__SYNTHESIS__” to remove code segment involving system calls from synthesis
‒ Macro “__SYNTHESIS__” is automatically defined by the Vivado HLS during elaboration
Coding Considerations 23- 13
void foo (…]) {
...
#ifndef __SYNTHESIS__
Code will be seen by simulation.
But not synthesis.
#endif
…
}
Only read this code if macro
__SYNTHESIS__ is not set
© Copyright 2018 Xilinx
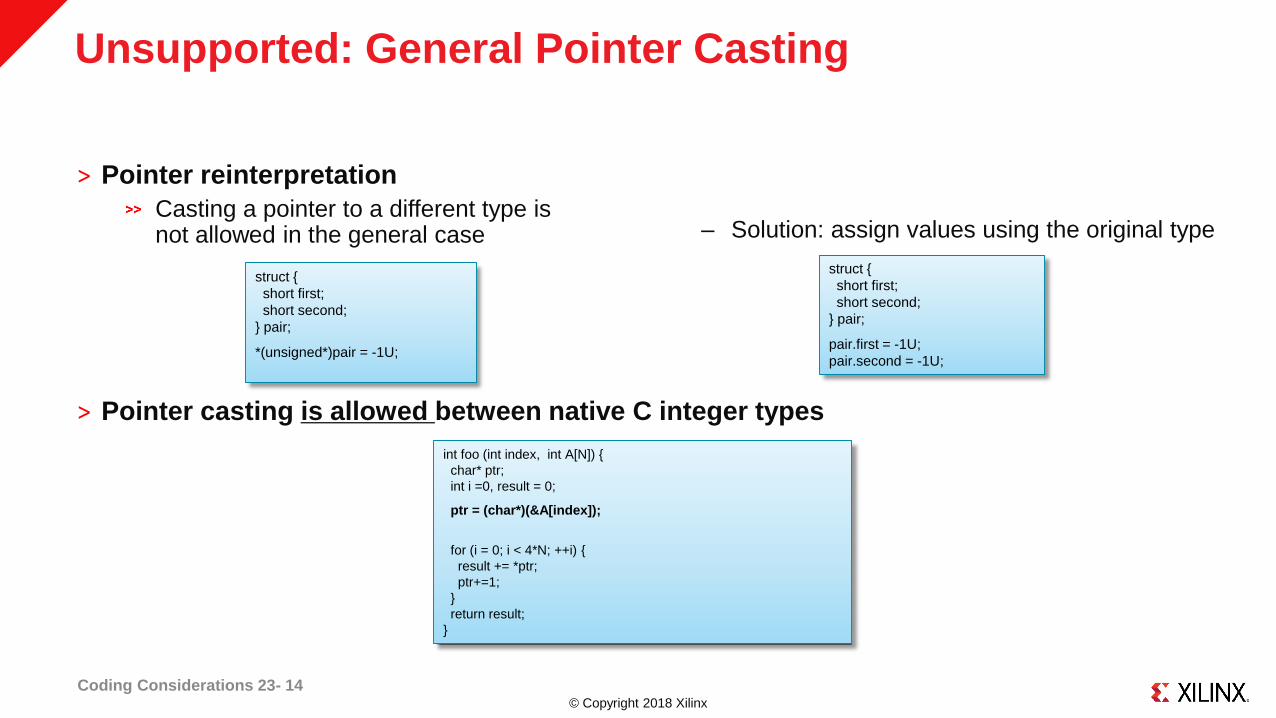
Unsupported: General Pointer Casting
˃ Pointer reinterpretation
Casting a pointer to a different type is not allowed in the general case
˃ Pointer casting is allowed between native C integer types
Coding Considerations 23- 14
– Solution: assign values using the original type
struct {
short first;
short second;
} pair;
*(unsigned*)pair = -1U;
struct {
short first;
short second;
} pair;
pair.first = -1U;
pair.second = -1U;
int foo (int index, int A[N]) {
char* ptr;
int i =0, result = 0;
ptr = (char*)(&A[index]);
for (i = 0; i < 4*N; ++i) {
result += *ptr;
ptr+=1;
}
return result;
}
© Copyright 2018 Xilinx
Unsupported: Recursive Functions
˃ Avoid recursive functions
Not synthesizable in general
‒ The code re-entrance indirectly uses dynamic memory allocation
˃ Standard Template Libraries (STLs)
Many are unbounded or use recursive functions
‒ In general they cannot be synthesized
Re-code to create a local bounded model
‒ Use arrays instead of vectors
‒ Shifts instead of queues
Coding Considerations 23- 15
unsigned foo (unsigned n)
{
if (n == 0 || n == 1) return 1;
return (foo(n-2) + foo(n-1));
}
Not synthesizable: Endless recursion
© Copyright 2018 Xilinx
Test Bench: Gotcha 1
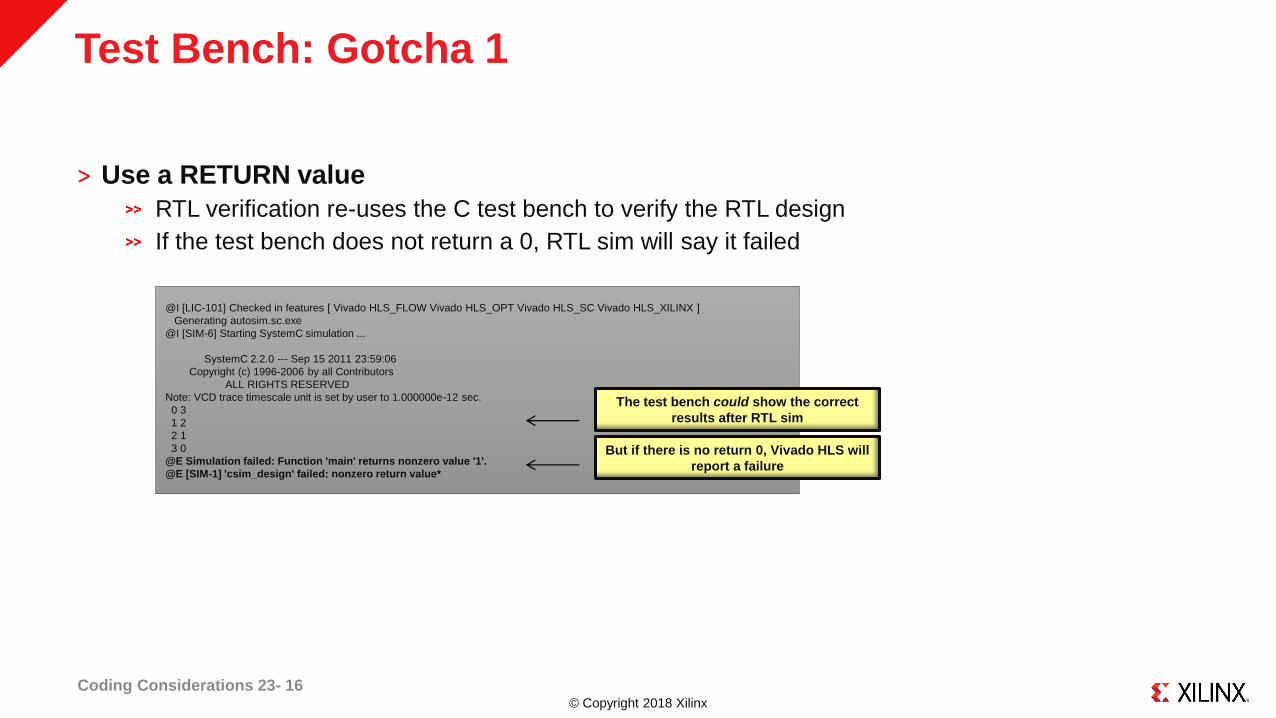
˃ Use a RETURN value
RTL verification re-uses the C test bench to verify the RTL design
If the test bench does not return a 0, RTL sim will say it failed
Coding Considerations 23- 16
@I [LIC-101] Checked in features [ Vivado HLS_FLOW Vivado HLS_OPT Vivado HLS_SC Vivado HLS_XILINX ]
Generating autosim.sc.exe
@I [SIM-6] Starting SystemC simulation ...
SystemC 2.2.0 --- Sep 15 2011 23:59:06
Copyright (c) 1996-2006 by all Contributors
ALL RIGHTS RESERVED
Note: VCD trace timescale unit is set by user to 1.000000e-12 sec.
0 3
1 2
2 1
3 0
@E Simulation failed: Function 'main' returns nonzero value '1'.
@E [SIM-1] 'csim_design' failed: nonzero return value*
The test bench could show the correct
results after RTL sim
But if there is no return 0, Vivado HLS will
report a failure
© Copyright 2018 Xilinx
Test Bench : Gotcha 2
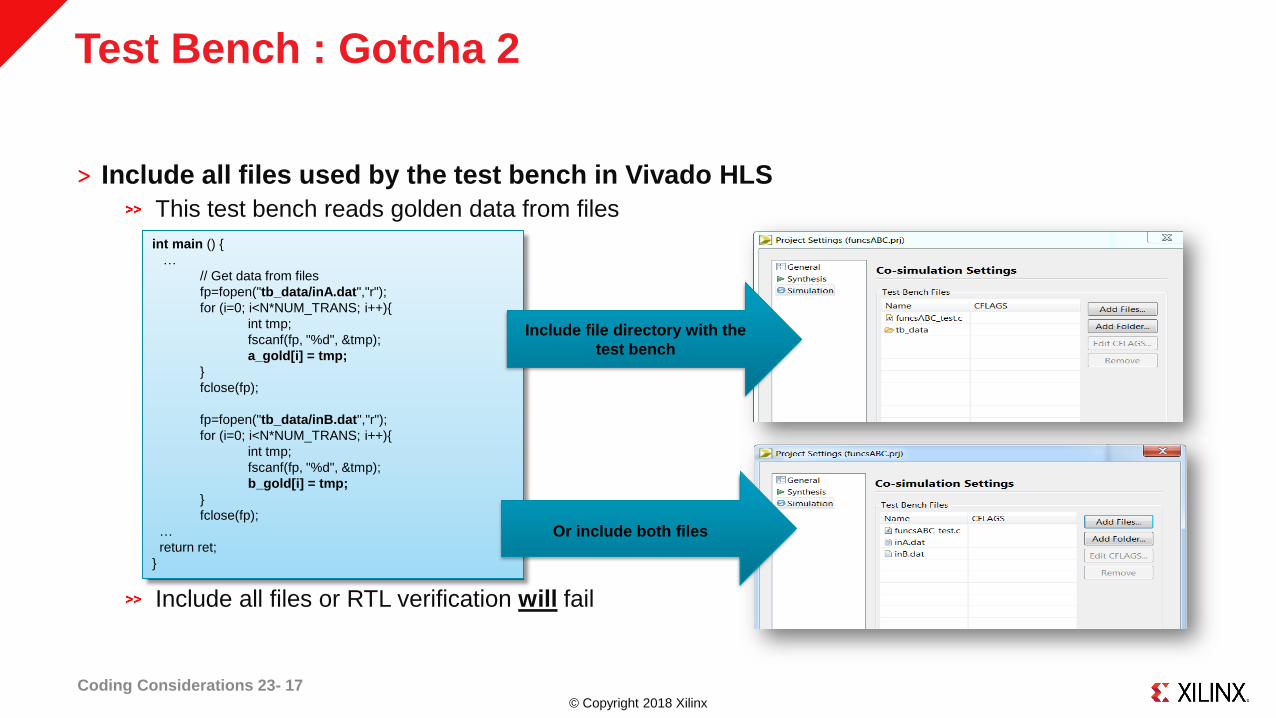
˃ Include all files used by the test bench in Vivado HLS
This test bench reads golden data from files
Include all files or RTL verification will fail
Coding Considerations 23- 17
int main () {
…
// Get data from files
fp=fopen("tb_data/inA.dat","r");
for (i=0; i<N*NUM_TRANS; i++){
int tmp;
fscanf(fp, "%d", &tmp);
a_gold[i] = tmp;
}
fclose(fp);
fp=fopen("tb_data/inB.dat","r");
for (i=0; i<N*NUM_TRANS; i++){
int tmp;
fscanf(fp, "%d", &tmp);
b_gold[i] = tmp;
}
fclose(fp);
…
return ret;
}
Include file directory with the
test bench
Or include both files

© Copyright 2018 Xilinx
Pointers
© Copyright 2018 Xilinx
Using Pointer
˃ Structs as pointers
Structs are implemented differently as pointers or pass-by-value
˃ Pointer arithmetic
Only supported as interface using ap_bus
˃ Converting pointers using malloc
Must be converted to fixed sized resources
˃ Multi-access Pointers
Must be marked as volatile or reads and writes will be optimized away
Cannot be rigorously validated with C simulation
Require a depth specification for RTL simulation
˃ Arrays of Pointers
When using arrays of pointers, each pointer must point to a scalar or a scalar array (not another pointer)
Coding Considerations 23- 19
© Copyright 2018 Xilinx
Pointer & Structs
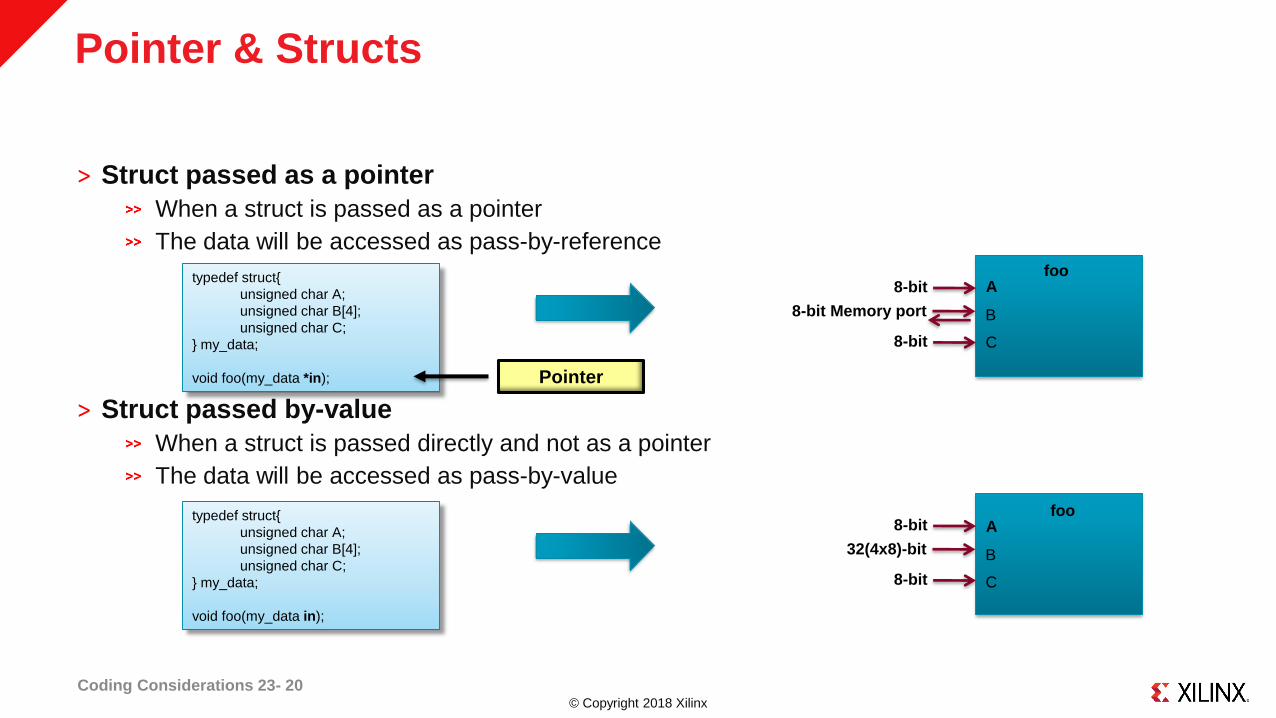
˃ Struct passed as a pointer
When a struct is passed as a pointer
The data will be accessed as pass-by-reference
˃ Struct passed by-value
When a struct is passed directly and not as a pointer
The data will be accessed as pass-by-value
Coding Considerations 23- 20
typedef struct{
unsigned char A;
unsigned char B[4];
unsigned char C;
} my_data;
void foo(my_data *in);
8-bit
8-bit Memory port
8-bit
fooA
B
C
Pointer
typedef struct{
unsigned char A;
unsigned char B[4];
unsigned char C;
} my_data;
void foo(my_data in);
8-bit
32(4x8)-bit
8-bit
fooA
B
C
© Copyright 2018 Xilinx
Struct Access
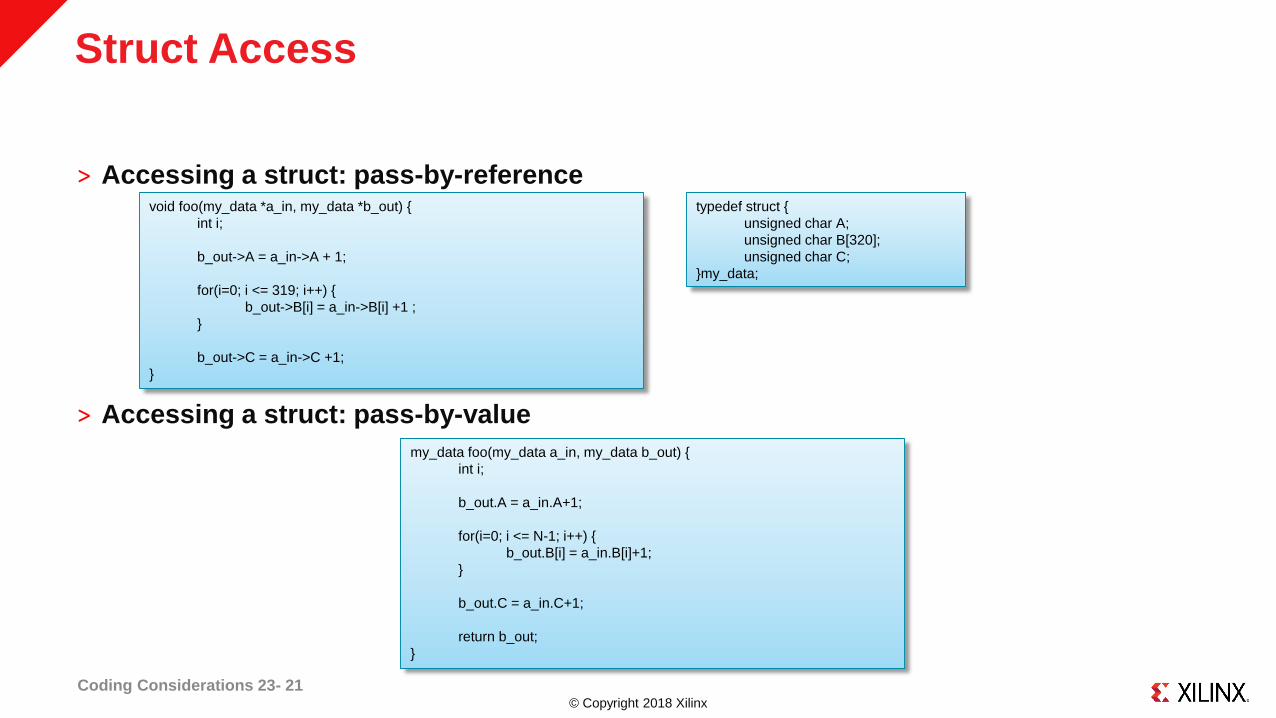
˃ Accessing a struct: pass-by-reference
˃ Accessing a struct: pass-by-value
Coding Considerations 23- 21
my_data foo(my_data a_in, my_data b_out) {
int i;
b_out.A = a_in.A+1;
for(i=0; i <= N-1; i++) {
b_out.B[i] = a_in.B[i]+1;
}
b_out.C = a_in.C+1;
return b_out;
}
void foo(my_data *a_in, my_data *b_out) {
int i;
b_out->A = a_in->A + 1;
for(i=0; i <= 319; i++) {
b_out->B[i] = a_in->B[i] +1 ;
}
b_out->C = a_in->C +1;
}
typedef struct {
unsigned char A;
unsigned char B[320];
unsigned char C;
}my_data;
© Copyright 2018 Xilinx
Pointer Arithmetic: One Interface
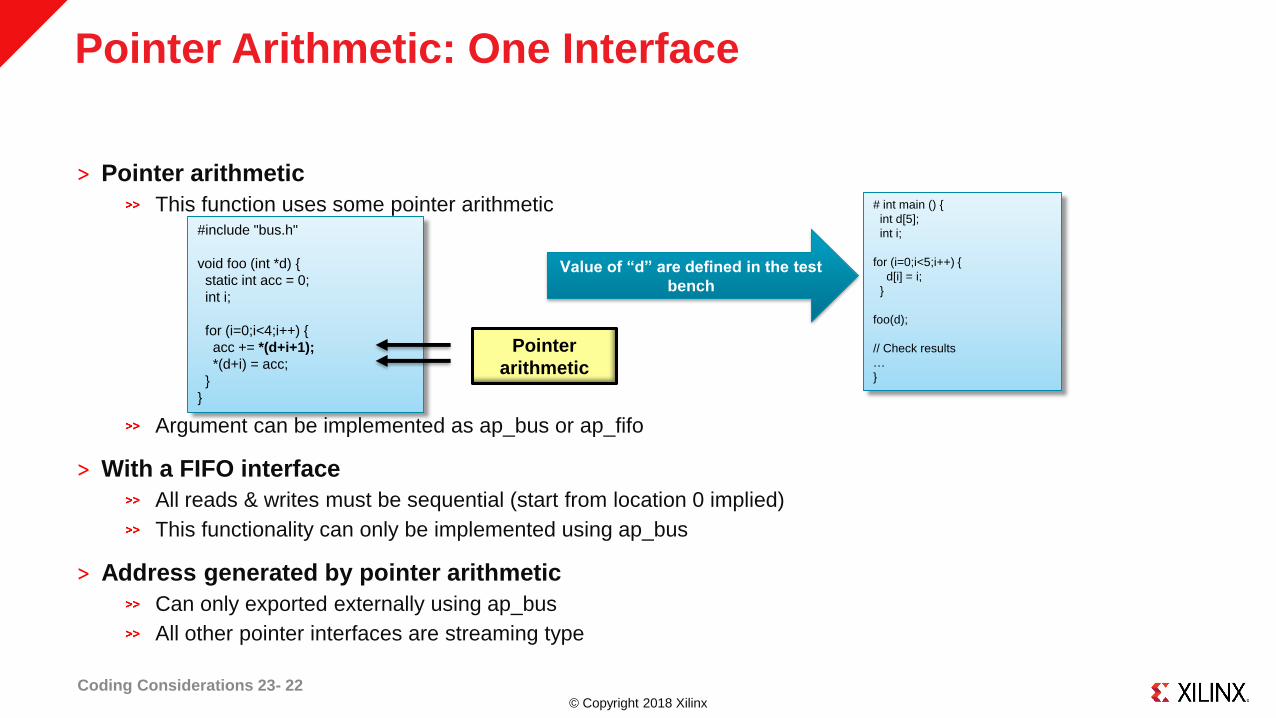
˃ Pointer arithmetic
This function uses some pointer arithmetic
Argument can be implemented as ap_bus or ap_fifo
˃ With a FIFO interface
All reads & writes must be sequential (start from location 0 implied)
This functionality can only be implemented using ap_bus
˃ Address generated by pointer arithmetic
Can only exported externally using ap_bus
All other pointer interfaces are streaming type
Coding Considerations 23- 22
#include "bus.h"
void foo (int *d) {
static int acc = 0;
int i;
for (i=0;i<4;i++) {
acc += *(d+i+1);
*(d+i) = acc;
}
}
Pointer
arithmetic
# int main () {
int d[5];
int i;
for (i=0;i<5;i++) {
d[i] = i;
}
foo(d);
// Check results
…
}
Value of “d” are defined in the test
bench
© Copyright 2018 Xilinx
Converting Malloc Pointers
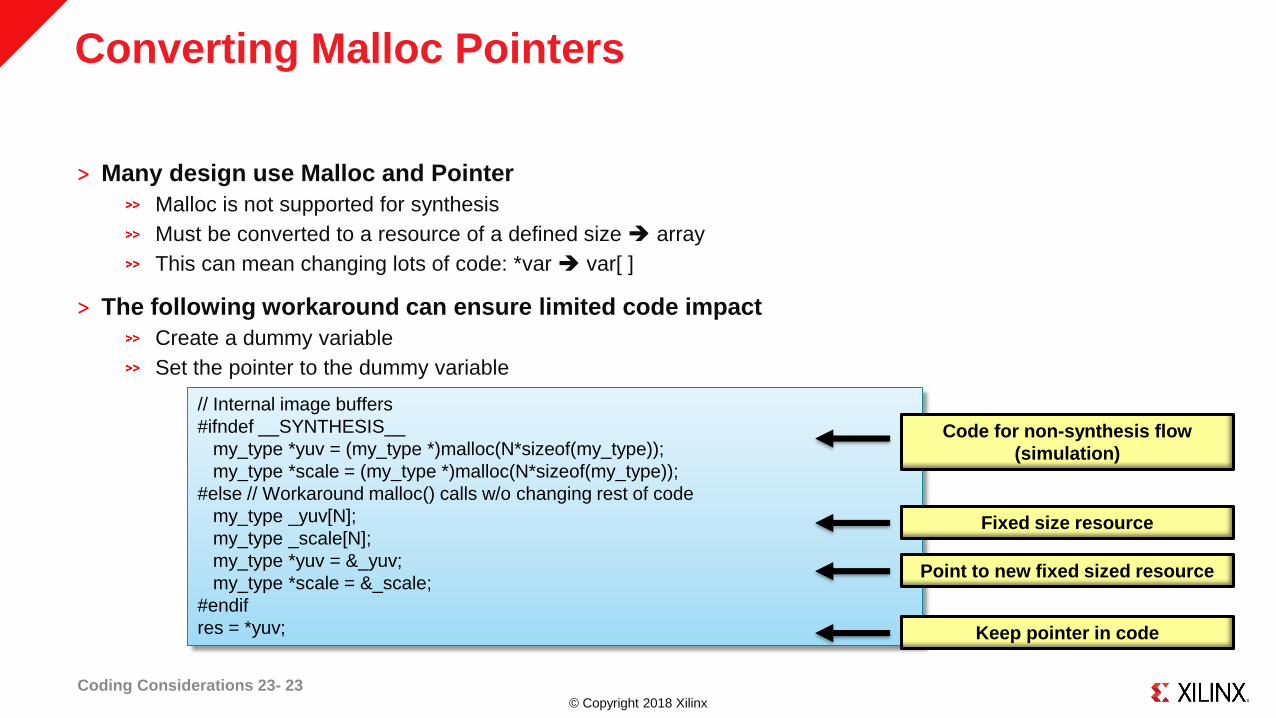
˃ Many design use Malloc and Pointer
Malloc is not supported for synthesis
Must be converted to a resource of a defined size array
This can mean changing lots of code: *var var[ ]
˃ The following workaround can ensure limited code impact
Create a dummy variable
Set the pointer to the dummy variable
Coding Considerations 23- 23
// Internal image buffers
#ifndef __SYNTHESIS__
my_type *yuv = (my_type *)malloc(N*sizeof(my_type));
my_type *scale = (my_type *)malloc(N*sizeof(my_type));
#else // Workaround malloc() calls w/o changing rest of code
my_type _yuv[N];
my_type _scale[N];
my_type *yuv = &_yuv;
my_type *scale = &_scale;
#endif
res = *yuv;
Code for non-synthesis flow
(simulation)
Fixed size resource
Point to new fixed sized resource
Keep pointer in code

© Copyright 2018 Xilinx
Coding Considerations and IO
© Copyright 2018 Xilinx
Coding and IO
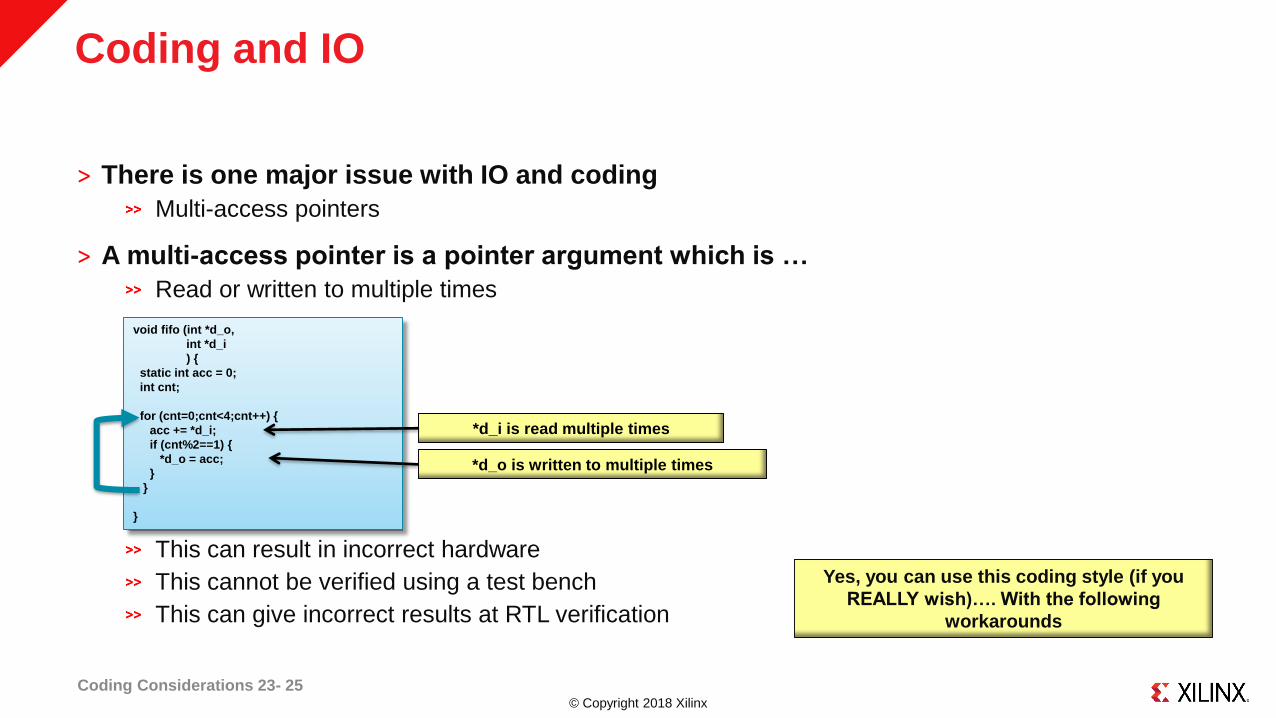
˃ There is one major issue with IO and coding
Multi-access pointers
˃ A multi-access pointer is a pointer argument which is …
Read or written to multiple times
This can result in incorrect hardware
This cannot be verified using a test bench
This can give incorrect results at RTL verification
Coding Considerations 23- 25
Yes, you can use this coding style (if you
REALLY wish)…. With the following
workarounds
void fifo (int *d_o,
int *d_i
) {
static int acc = 0;
int cnt;
for (cnt=0;cnt<4;cnt++) {
acc += *d_i;
if (cnt%2==1) {
*d_o = acc;
}
}
}
*d_i is read multiple times
*d_o is written to multiple times
© Copyright 2018 Xilinx
Multi-Access Pointers: Use Volatile!!!
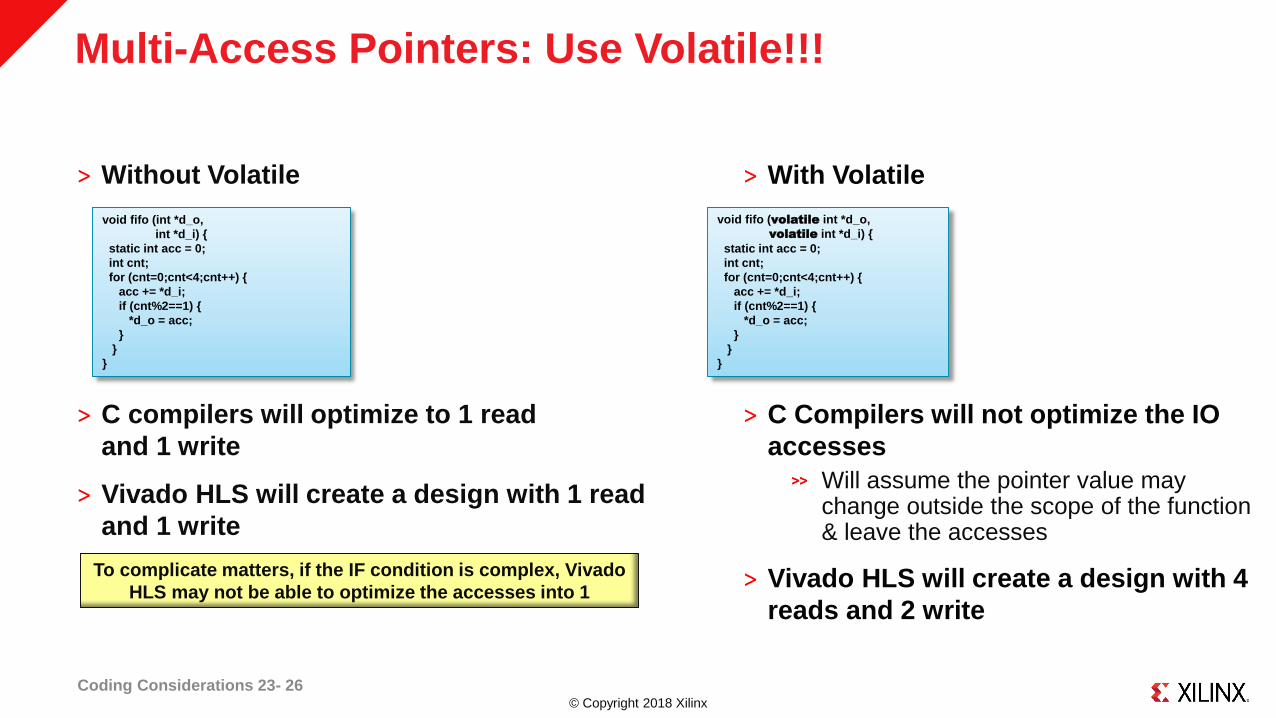
˃ Without Volatile
˃ C compilers will optimize to 1 read
and 1 write
˃ Vivado HLS will create a design with 1 read
and 1 write
Coding Considerations 23- 26
˃ With Volatile
˃ C Compilers will not optimize the IO
accesses
Will assume the pointer value may change outside the scope of the function & leave the accesses
˃ Vivado HLS will create a design with 4
reads and 2 write
To complicate matters, if the IF condition is complex, Vivado
HLS may not be able to optimize the accesses into 1
void fifo (int *d_o,
int *d_i) {
static int acc = 0;
int cnt;
for (cnt=0;cnt<4;cnt++) {
acc += *d_i;
if (cnt%2==1) {
*d_o = acc;
}
}
}
void fifo (volatile int *d_o,
volatile int *d_i) {
static int acc = 0;
int cnt;
for (cnt=0;cnt<4;cnt++) {
acc += *d_i;
if (cnt%2==1) {
*d_o = acc;
}
}
}
© Copyright 2018 Xilinx
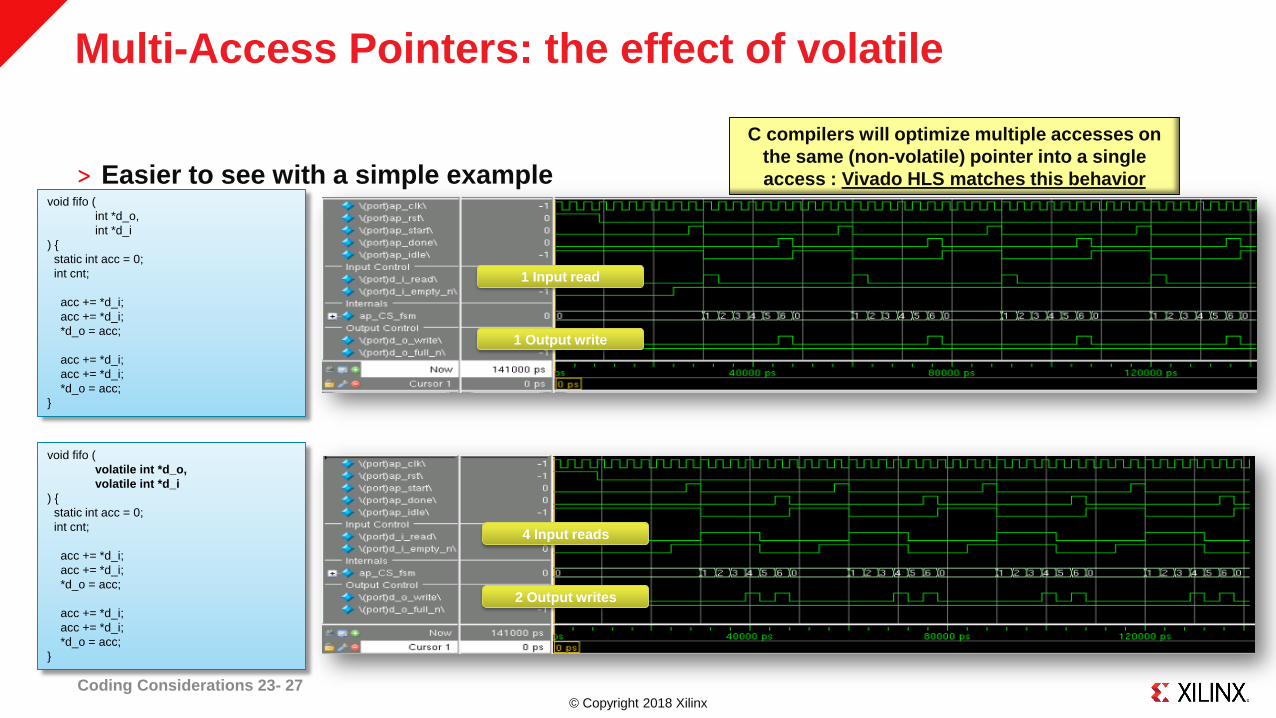
Multi-Access Pointers: the effect of volatile
˃ Easier to see with a simple example
Coding Considerations 23- 27
C compilers will optimize multiple accesses on
the same (non-volatile) pointer into a single
access : Vivado HLS matches this behaviorvoid fifo (
int *d_o,
int *d_i
) {
static int acc = 0;
int cnt;
acc += *d_i;
acc += *d_i;
*d_o = acc;
acc += *d_i;
acc += *d_i;
*d_o = acc;
}
void fifo (
volatile int *d_o,
volatile int *d_i
) {
static int acc = 0;
int cnt;
acc += *d_i;
acc += *d_i;
*d_o = acc;
acc += *d_i;
acc += *d_i;
*d_o = acc;
}
1 Input read
1 Output write
4 Input reads
2 Output writes

© Copyright 2018 Xilinx
Multi-Access Pointers: Limited Visibility
˃ The intermediate results are hard to use for verification
Only the final pointer value is passed to the test bench
• The final value of *d_o can be captured in the test bench and compared
• The intermediate values can only be seen by using printf : they cannot be automatically verified by the test bench
˃ Code could be added to the DUT
Use __SYNTHESIS__ to add unsynthesizable code for checking
Which will not be there in the RTL
HLS:STREAMS class can be used instead: discussed in next section
Coding Considerations 23- 28
Not the most ideal coding style for verification
void fifo (int *d_o,
int *d_i
) {
static int acc = 0;
int cnt;
for (cnt=0;cnt<4;cnt++) {
acc += *d_i;
if (cnt%2==1) {
*d_o = acc;
}
}
}
© Copyright 2018 Xilinx
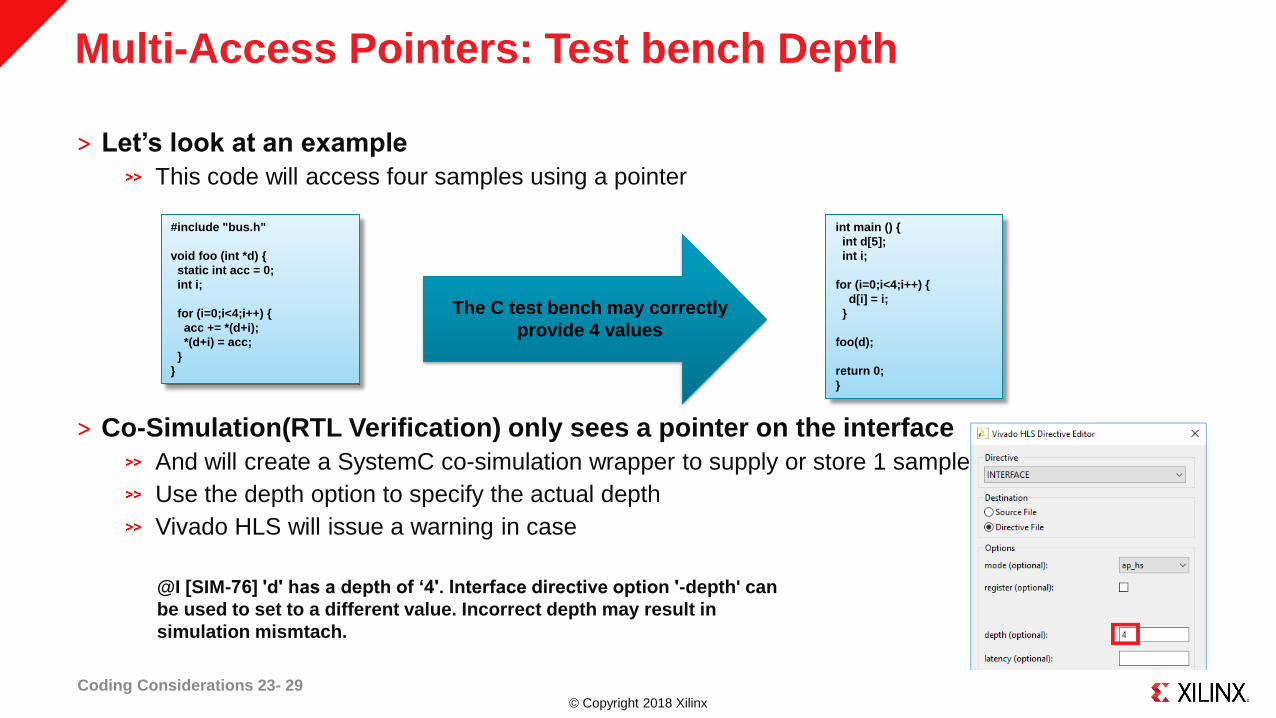
Multi-Access Pointers: Test bench Depth
˃ Let’s look at an example
This code will access four samples using a pointer
˃ Co-Simulation(RTL Verification) only sees a pointer on the interface
And will create a SystemC co-simulation wrapper to supply or store 1 sample
Use the depth option to specify the actual depth
Vivado HLS will issue a warning in case
Coding Considerations 23- 29
@I [SIM-76] 'd' has a depth of ‘4'. Interface directive option '-depth' can
be used to set to a different value. Incorrect depth may result in
simulation mismtach.
#include "bus.h"
void foo (int *d) {
static int acc = 0;
int i;
for (i=0;i<4;i++) {
acc += *(d+i);
*(d+i) = acc;
}
}
int main () {
int d[5];
int i;
for (i=0;i<4;i++) {
d[i] = i;
}
foo(d);
return 0;
}
The C test bench may correctly
provide 4 values

© Copyright 2018 Xilinx
Streams
© Copyright 2018 Xilinx
Designing with Streams
˃ Streams can be used instead of multi-access pointers
None of the issues
˃ Streams simulate like an infinite FIFO in software
Implemented as a FIFO of user-defined size in hardware
˃ Streams have support for multi-access
Streams interface to the testbench
Streams can be read in the testbench to check the intermediate values
Streams store values: no chance of the volatile effect
˃ Streams are supported on the interface and internally
Define the stream as static to make it internal only
Coding Considerations 23- 31
© Copyright 2018 Xilinx
Using Streams
˃ Streams are C++ classes
Modeled in C++ an as infinite depth FIFO
Can be written to or read from
˃ Ideal for Hardware Modeling
Ideal for modeling designs in which the data is known to be streaming (data is always in sequential order)
‒ Video or Communication designs typically stream data
No need to model the design in C++ as a “frame”
Streams allow it to be modeled as per-sample processing
‒ Just fill the stream in the test bench
‒ Read and write to the stream as if it’s an infinite FIFO
‒ Read from the stream in the test bench to confirm results
˃ Stream are by default implemented as a FIFO of depth 2
Can be specified by the user: needed for decimation/interpolation designs
Coding Considerations 23- 32
© Copyright 2018 Xilinx
Stream Example
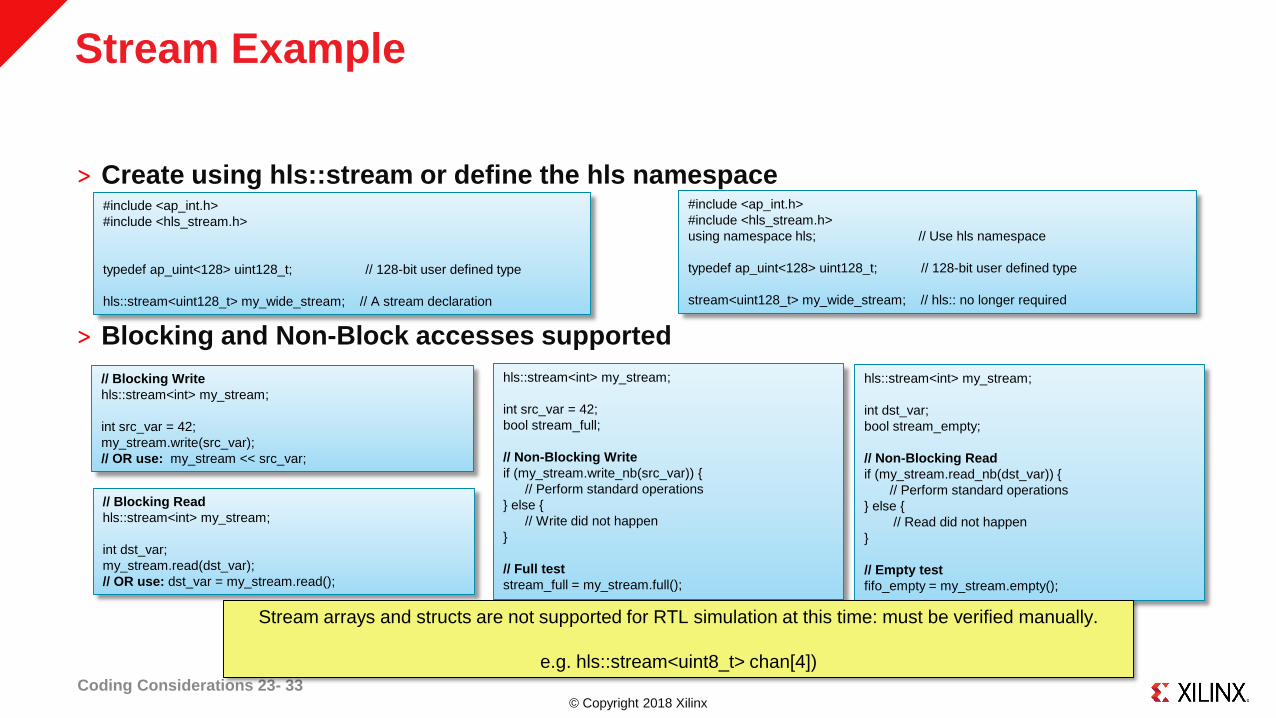
˃ Create using hls::stream or define the hls namespace
˃ Blocking and Non-Block accesses supported
Coding Considerations 23- 33
#include <ap_int.h>
#include <hls_stream.h>
typedef ap_uint<128> uint128_t; // 128-bit user defined type
hls::stream<uint128_t> my_wide_stream; // A stream declaration
#include <ap_int.h>
#include <hls_stream.h>
using namespace hls; // Use hls namespace
typedef ap_uint<128> uint128_t; // 128-bit user defined type
stream<uint128_t> my_wide_stream; // hls:: no longer required
// Blocking Write
hls::stream<int> my_stream;
int src_var = 42;
my_stream.write(src_var);
// OR use: my_stream << src_var;
// Blocking Read
hls::stream<int> my_stream;
int dst_var;
my_stream.read(dst_var);
// OR use: dst_var = my_stream.read();
hls::stream<int> my_stream;
int src_var = 42;
bool stream_full;
// Non-Blocking Write
if (my_stream.write_nb(src_var)) {
// Perform standard operations
} else {
// Write did not happen
}
// Full test
stream_full = my_stream.full();
hls::stream<int> my_stream;
int dst_var;
bool stream_empty;
// Non-Blocking Read
if (my_stream.read_nb(dst_var)) {
// Perform standard operations
} else {
// Read did not happen
}
// Empty test
fifo_empty = my_stream.empty();
Stream arrays and structs are not supported for RTL simulation at this time: must be verified manually.
e.g. hls::stream<uint8_t> chan[4])

© Copyright 2018 Xilinx
Libraries Support -
FFT, FIR, Shift Registers and
Linear Algebra
© Copyright 2018 Xilinx
FFT and FIR IP in HLS
˃ The Xilinx FFT and FIR IP are available in Vivado HLS
C simulates with a bit-accurate model
Fully configurable within the C++ source code
‒ Pre-defined C++ structs allow the IP to be configured & accessed
˃ Supported only for C++
Implemented with templates
˃ High-Quality Implementation
Same hardware as implemented by RTL versions of this IP
Functionality fully described in Xilinx Documentation
‒ LogiCORE IP Fast Fourier Transform v9.0 (document PG109)
‒ LogiCORE IP FIR Compiler v7.2 (document PG149)
Coding Considerations 23- 35
© Copyright 2018 Xilinx
FFT Function
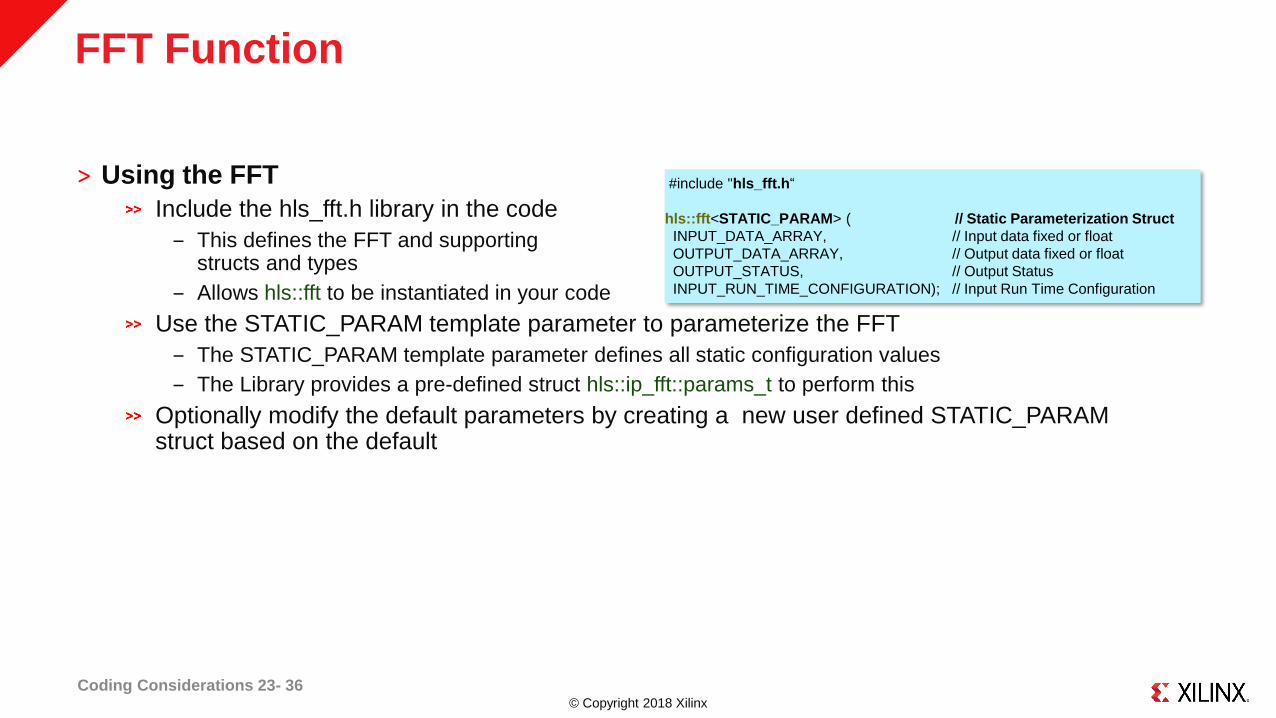
˃ Using the FFT
Include the hls_fft.h library in the code
‒ This defines the FFT and supporting structs and types
‒ Allows hls::fft to be instantiated in your code
Use the STATIC_PARAM template parameter to parameterize the FFT
‒ The STATIC_PARAM template parameter defines all static configuration values
‒ The Library provides a pre-defined struct hls::ip_fft::params_t to perform this
Optionally modify the default parameters by creating a new user defined STATIC_PARAM struct based on the default
Coding Considerations 23- 36
#include "hls_fft.h“
hls::fft<STATIC_PARAM> ( // Static Parameterization Struct
INPUT_DATA_ARRAY, // Input data fixed or float
OUTPUT_DATA_ARRAY, // Output data fixed or float
OUTPUT_STATUS, // Output Status
INPUT_RUN_TIME_CONFIGURATION); // Input Run Time Configuration
© Copyright 2018 Xilinx
FFT Static Configuration
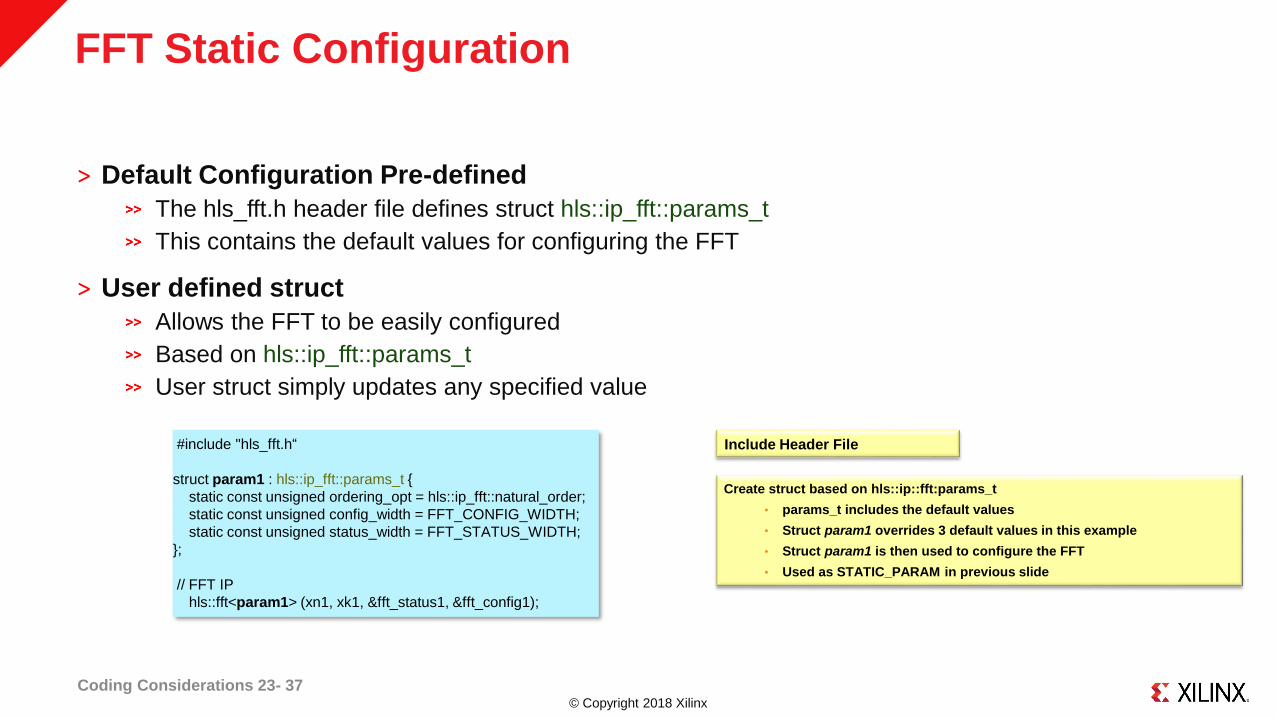
˃ Default Configuration Pre-defined
The hls_fft.h header file defines struct hls::ip_fft::params_t
This contains the default values for configuring the FFT
˃ User defined struct
Allows the FFT to be easily configured
Based on hls::ip_fft::params_t
User struct simply updates any specified value
Coding Considerations 23- 37
#include "hls_fft.h“
struct param1 : hls::ip_fft::params_t {
static const unsigned ordering_opt = hls::ip_fft::natural_order;
static const unsigned config_width = FFT_CONFIG_WIDTH;
static const unsigned status_width = FFT_STATUS_WIDTH;
};
// FFT IP
hls::fft<param1> (xn1, xk1, &fft_status1, &fft_config1);
Include Header File
Create struct based on hls::ip::fft:params_t
• params_t includes the default values
• Struct param1 overrides 3 default values in this example
• Struct param1 is then used to configure the FFT
• Used as STATIC_PARAM in previous slide
© Copyright 2018 Xilinx
FFT Configuration Parameters
Coding Considerations 23- 38
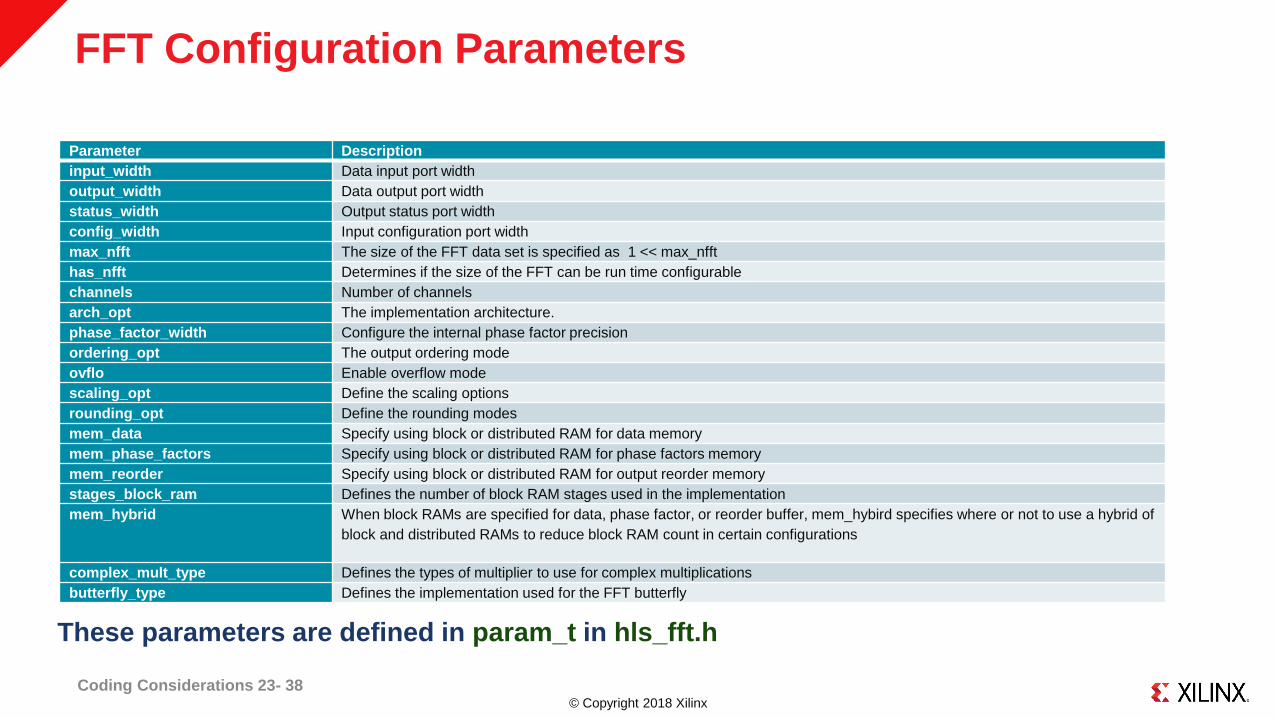
These parameters are defined in param_t in hls_fft.h
Parameter Description
input_width Data input port width
output_width Data output port width
status_width Output status port width
config_width Input configuration port width
max_nfft The size of the FFT data set is specified as 1 << max_nfft
has_nfft Determines if the size of the FFT can be run time configurable
channels Number of channels
arch_opt The implementation architecture.
phase_factor_width Configure the internal phase factor precision
ordering_opt The output ordering mode
ovflo Enable overflow mode
scaling_opt Define the scaling options
rounding_opt Define the rounding modes
mem_data Specify using block or distributed RAM for data memory
mem_phase_factors Specify using block or distributed RAM for phase factors memory
mem_reorder Specify using block or distributed RAM for output reorder memory
stages_block_ram Defines the number of block RAM stages used in the implementation
mem_hybrid When block RAMs are specified for data, phase factor, or reorder buffer, mem_hybird specifies where or not to use a hybrid of
block and distributed RAMs to reduce block RAM count in certain configurations
complex_mult_type Defines the types of multiplier to use for complex multiplications
butterfly_type Defines the implementation used for the FFT butterfly
© Copyright 2018 Xilinx
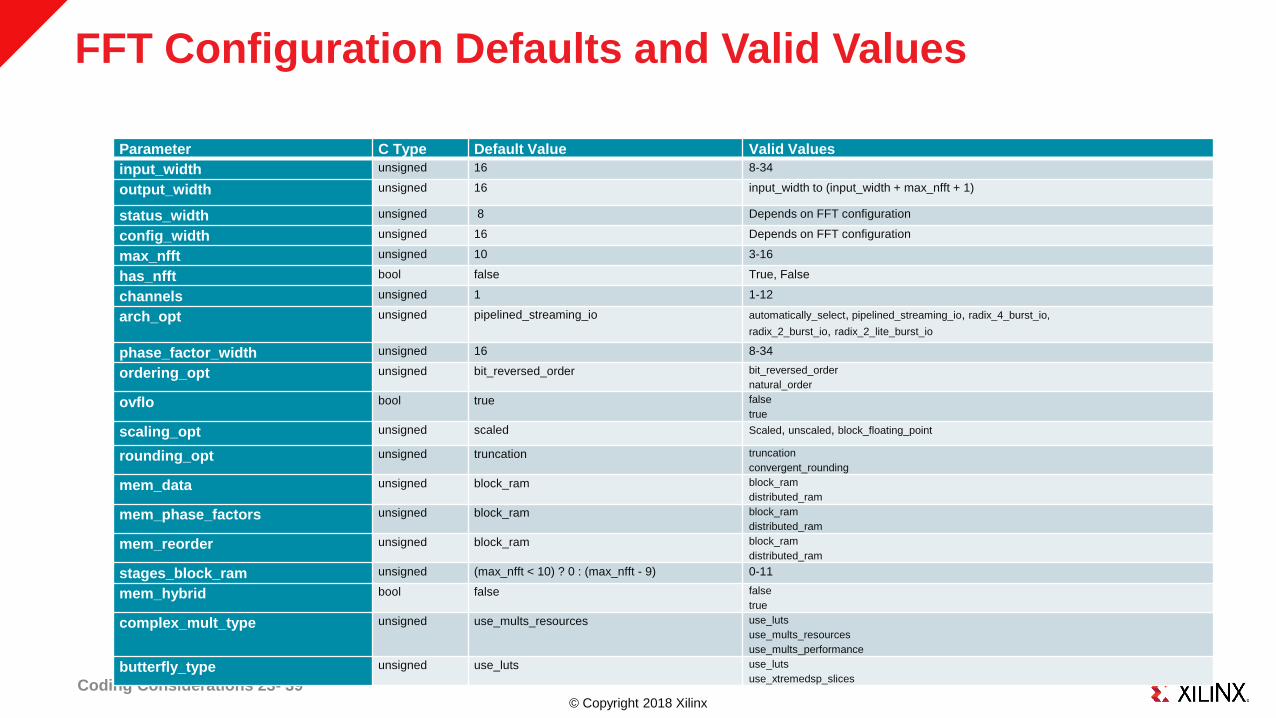
FFT Configuration Defaults and Valid Values
Coding Considerations 23- 39
Parameter C Type Default Value Valid Values
input_width unsigned 16 8-34
output_width unsigned 16 input_width to (input_width + max_nfft + 1)
status_width unsigned 8 Depends on FFT configuration
config_width unsigned 16 Depends on FFT configuration
max_nfft unsigned 10 3-16
has_nfft bool false True, False
channels unsigned 1 1-12
arch_opt unsigned pipelined_streaming_io automatically_select, pipelined_streaming_io, radix_4_burst_io,
radix_2_burst_io, radix_2_lite_burst_io
phase_factor_width unsigned 16 8-34
ordering_opt unsigned bit_reversed_order bit_reversed_order
natural_order
ovflo bool true false
true
scaling_opt unsigned scaled Scaled, unscaled, block_floating_point
rounding_opt unsigned truncation truncation
convergent_rounding
mem_data unsigned block_ram block_ram
distributed_ram
mem_phase_factors unsigned block_ram block_ram
distributed_ram
mem_reorder unsigned block_ram block_ram
distributed_ram
stages_block_ram unsigned (max_nfft < 10) ? 0 : (max_nfft - 9) 0-11
mem_hybrid bool false false
true
complex_mult_type unsigned use_mults_resources use_luts
use_mults_resources
use_mults_performance
butterfly_type unsigned use_luts use_luts
use_xtremedsp_slices
© Copyright 2018 Xilinx
FFT Function: Data
˃ Input & Output Data
Data Input and Output
‒ Array arguments of type ap_fixed or float type
‒ Two-dimensional arrays are used for multi-channel functionality
First dimension represents the channels; Second dimension the data for each channel
IP only supports multi-channels for ap_fixed (not float)
Coding Considerations 23- 40
#include "hls_fft.h“
hls::fft<STATIC_PARAM> ( // Static Parameterization Struct
INPUT_DATA_ARRAY, // Input data fixed or float
OUTPUT_DATA_ARRAY, // Output data fixed or float
OUTPUT_STATUS, // Output Status
INPUT_RUN_TIME_CONFIGURATION); // Input Run Time Configuration
© Copyright 2018 Xilinx
FFT Function: Run Time Configuration
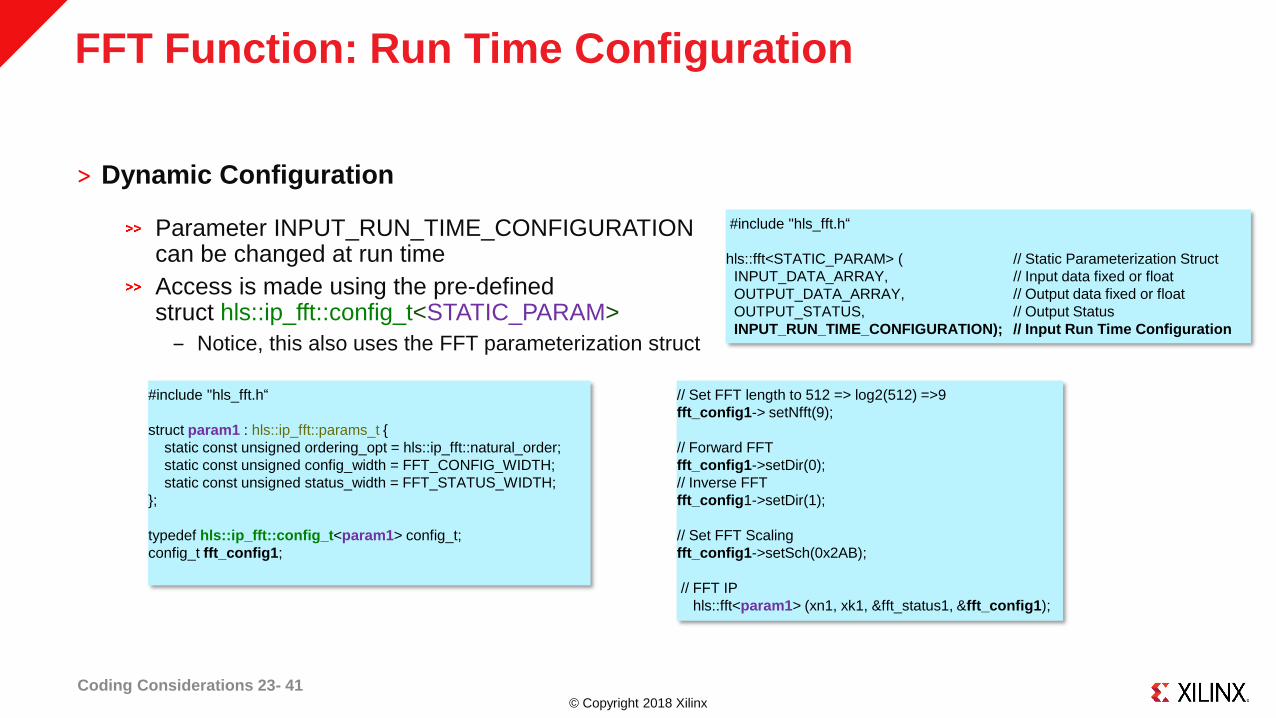
˃ Dynamic Configuration
Parameter INPUT_RUN_TIME_CONFIGURATION can be changed at run time
Access is made using the pre-defined struct hls::ip_fft::config_t<STATIC_PARAM>
‒ Notice, this also uses the FFT parameterization struct
Coding Considerations 23- 41
#include "hls_fft.h“
hls::fft<STATIC_PARAM> ( // Static Parameterization Struct
INPUT_DATA_ARRAY, // Input data fixed or float
OUTPUT_DATA_ARRAY, // Output data fixed or float
OUTPUT_STATUS, // Output Status
INPUT_RUN_TIME_CONFIGURATION); // Input Run Time Configuration
#include "hls_fft.h“
struct param1 : hls::ip_fft::params_t {
static const unsigned ordering_opt = hls::ip_fft::natural_order;
static const unsigned config_width = FFT_CONFIG_WIDTH;
static const unsigned status_width = FFT_STATUS_WIDTH;
};
typedef hls::ip_fft::config_t<param1> config_t;
config_t fft_config1;
// Set FFT length to 512 => log2(512) =>9
fft_config1-> setNfft(9);
// Forward FFT
fft_config1->setDir(0);
// Inverse FFT
fft_config1->setDir(1);
// Set FFT Scaling
fft_config1->setSch(0x2AB);
// FFT IP
hls::fft<param1> (xn1, xk1, &fft_status1, &fft_config1);
© Copyright 2018 Xilinx
FFT Function: Run Time Output Status
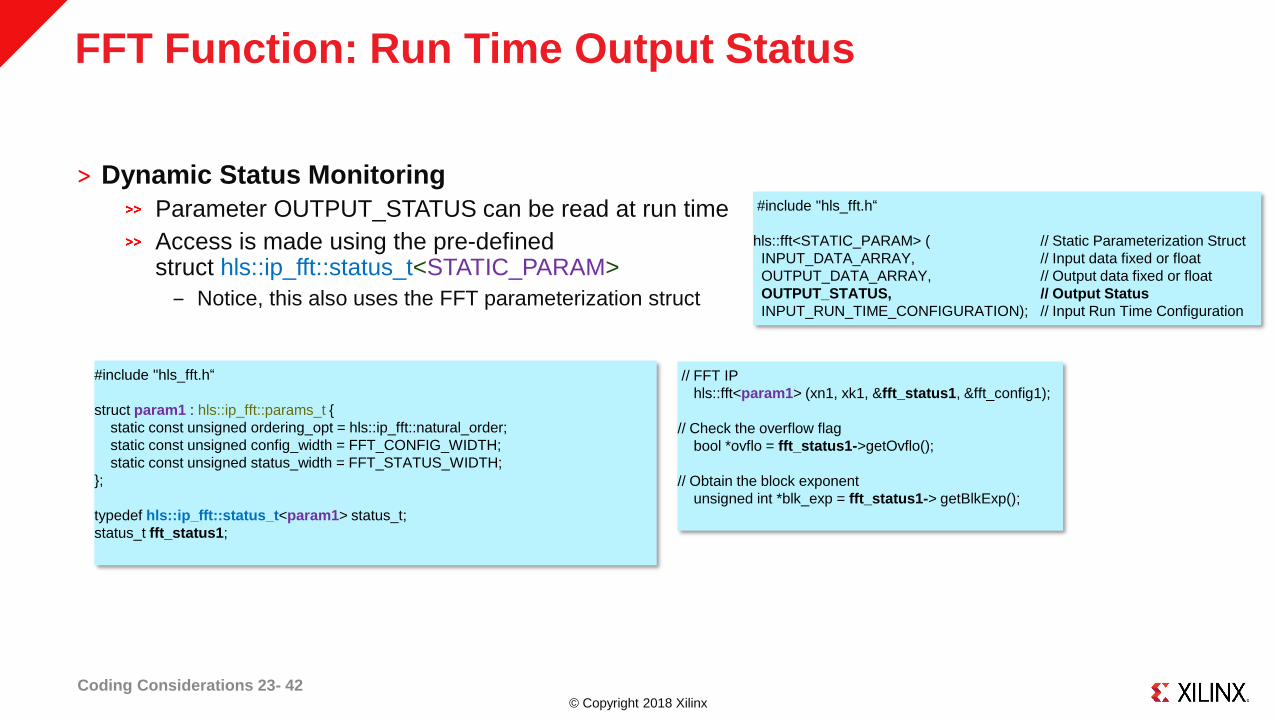
˃ Dynamic Status Monitoring
Parameter OUTPUT_STATUS can be read at run time
Access is made using the pre-defined struct hls::ip_fft::status_t<STATIC_PARAM>
‒ Notice, this also uses the FFT parameterization struct
Coding Considerations 23- 42
#include "hls_fft.h“
struct param1 : hls::ip_fft::params_t {
static const unsigned ordering_opt = hls::ip_fft::natural_order;
static const unsigned config_width = FFT_CONFIG_WIDTH;
static const unsigned status_width = FFT_STATUS_WIDTH;
};
typedef hls::ip_fft::status_t<param1> status_t;
status_t fft_status1;
// FFT IP
hls::fft<param1> (xn1, xk1, &fft_status1, &fft_config1);
// Check the overflow flag
bool *ovflo = fft_status1->getOvflo();
// Obtain the block exponent
unsigned int *blk_exp = fft_status1-> getBlkExp();
#include "hls_fft.h“
hls::fft<STATIC_PARAM> ( // Static Parameterization Struct
INPUT_DATA_ARRAY, // Input data fixed or float
OUTPUT_DATA_ARRAY, // Output data fixed or float
OUTPUT_STATUS, // Output Status
INPUT_RUN_TIME_CONFIGURATION); // Input Run Time Configuration
© Copyright 2018 Xilinx
FIR Function
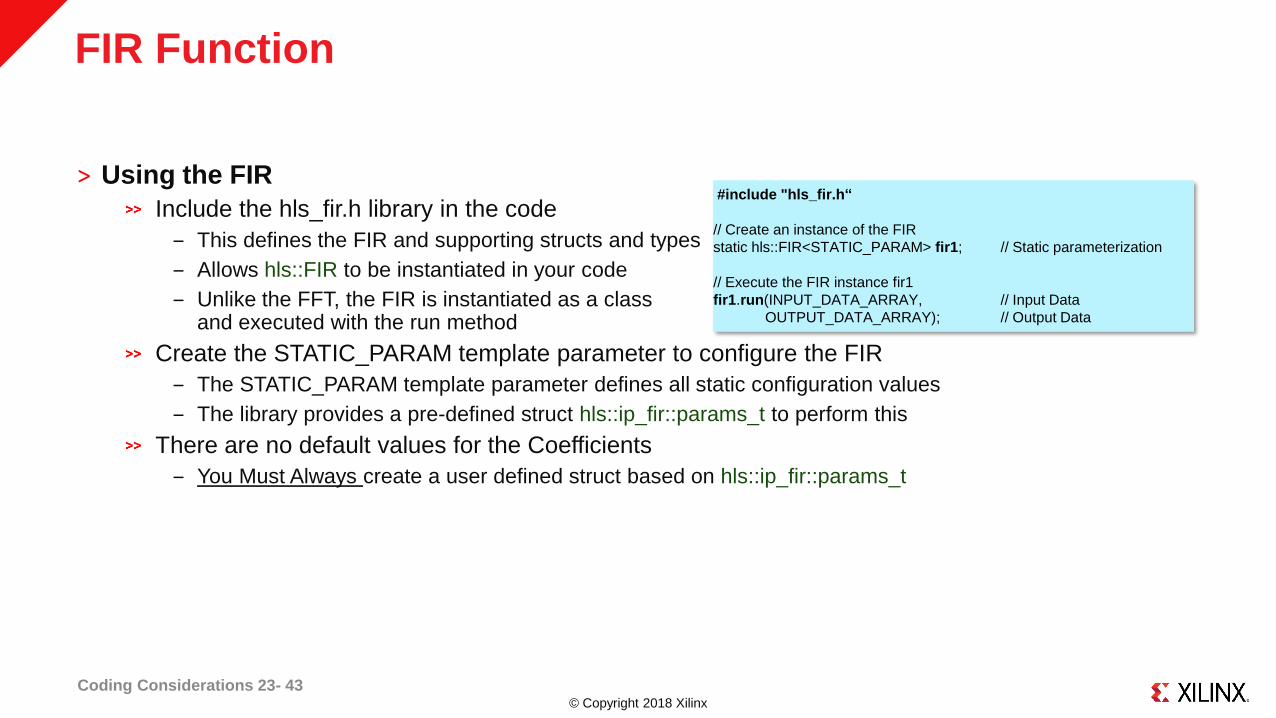
˃ Using the FIR
Include the hls_fir.h library in the code
‒ This defines the FIR and supporting structs and types
‒ Allows hls::FIR to be instantiated in your code
‒ Unlike the FFT, the FIR is instantiated as a class and executed with the run method
Create the STATIC_PARAM template parameter to configure the FIR
‒ The STATIC_PARAM template parameter defines all static configuration values
‒ The library provides a pre-defined struct hls::ip_fir::params_t to perform this
There are no default values for the Coefficients
‒ You Must Always create a user defined struct based on hls::ip_fir::params_t
Coding Considerations 23- 43
#include "hls_fir.h“
// Create an instance of the FIR
static hls::FIR<STATIC_PARAM> fir1; // Static parameterization
// Execute the FIR instance fir1
fir1.run(INPUT_DATA_ARRAY, // Input Data
OUTPUT_DATA_ARRAY); // Output Data
© Copyright 2018 Xilinx
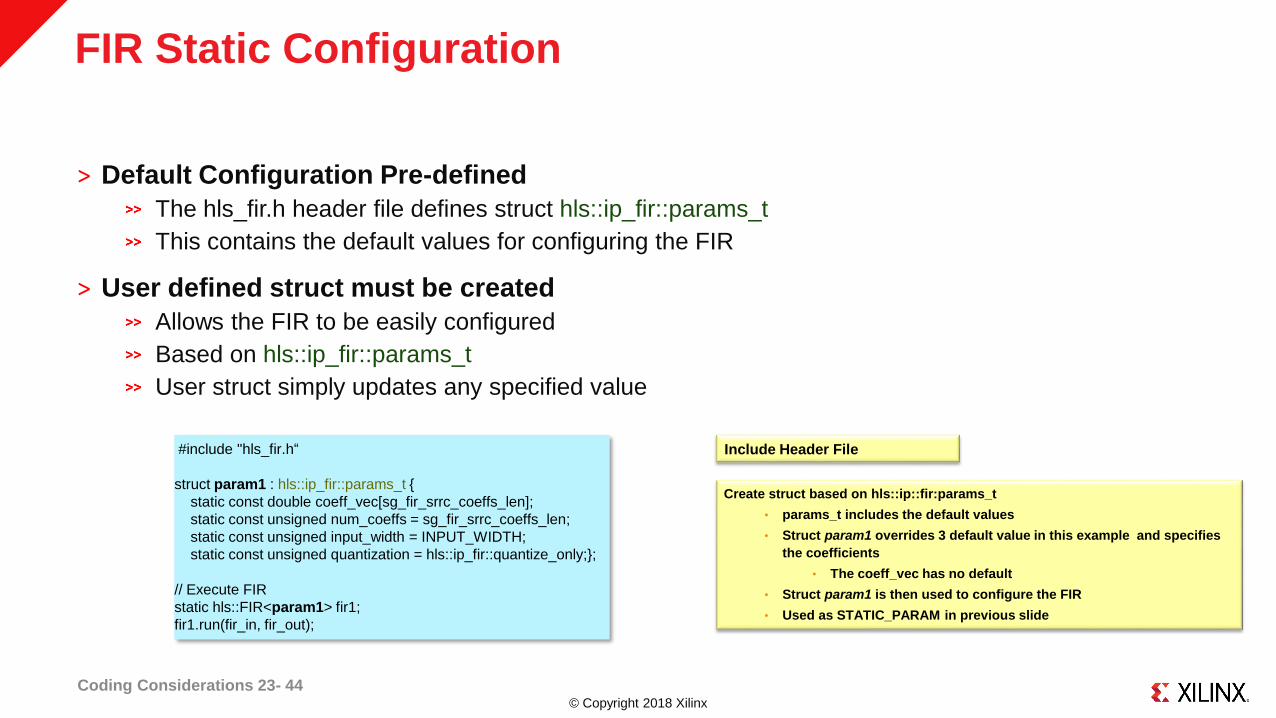
FIR Static Configuration
˃ Default Configuration Pre-defined
The hls_fir.h header file defines struct hls::ip_fir::params_t
This contains the default values for configuring the FIR
˃ User defined struct must be created
Allows the FIR to be easily configured
Based on hls::ip_fir::params_t
User struct simply updates any specified value
Coding Considerations 23- 44
#include "hls_fir.h“
struct param1 : hls::ip_fir::params_t {
static const double coeff_vec[sg_fir_srrc_coeffs_len];
static const unsigned num_coeffs = sg_fir_srrc_coeffs_len;
static const unsigned input_width = INPUT_WIDTH;
static const unsigned quantization = hls::ip_fir::quantize_only;};
// Execute FIR
static hls::FIR<param1> fir1;
fir1.run(fir_in, fir_out);
Include Header File
Create struct based on hls::ip::fir:params_t
• params_t includes the default values
• Struct param1 overrides 3 default value in this example and specifies
the coefficients
• The coeff_vec has no default
• Struct param1 is then used to configure the FIR
• Used as STATIC_PARAM in previous slide
© Copyright 2018 Xilinx
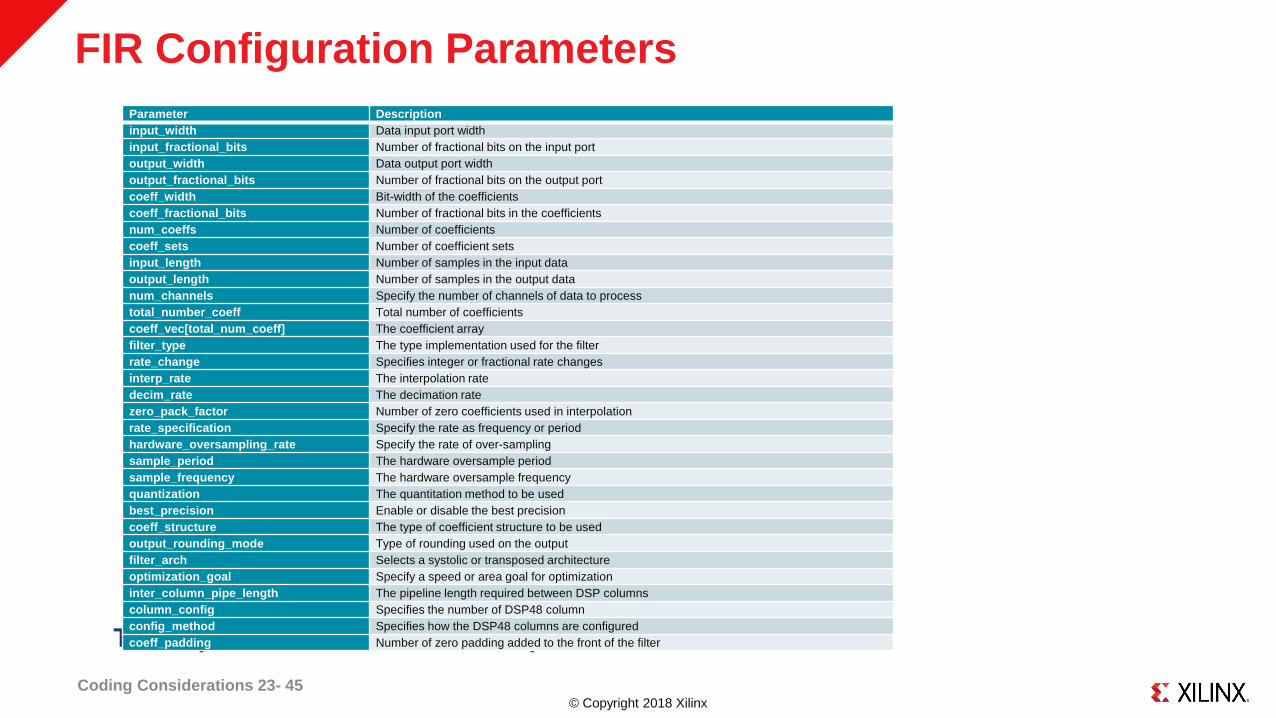
FIR Configuration Parameters
Coding Considerations 23- 45
These parameters are defined in param_t in hls_fir.h
Parameter Description
input_width Data input port width
input_fractional_bits Number of fractional bits on the input port
output_width Data output port width
output_fractional_bits Number of fractional bits on the output port
coeff_width Bit-width of the coefficients
coeff_fractional_bits Number of fractional bits in the coefficients
num_coeffs Number of coefficients
coeff_sets Number of coefficient sets
input_length Number of samples in the input data
output_length Number of samples in the output data
num_channels Specify the number of channels of data to process
total_number_coeff Total number of coefficients
coeff_vec[total_num_coeff] The coefficient array
filter_type The type implementation used for the filter
rate_change Specifies integer or fractional rate changes
interp_rate The interpolation rate
decim_rate The decimation rate
zero_pack_factor Number of zero coefficients used in interpolation
rate_specification Specify the rate as frequency or period
hardware_oversampling_rate Specify the rate of over-sampling
sample_period The hardware oversample period
sample_frequency The hardware oversample frequency
quantization The quantitation method to be used
best_precision Enable or disable the best precision
coeff_structure The type of coefficient structure to be used
output_rounding_mode Type of rounding used on the output
filter_arch Selects a systolic or transposed architecture
optimization_goal Specify a speed or area goal for optimization
inter_column_pipe_length The pipeline length required between DSP columns
column_config Specifies the number of DSP48 column
config_method Specifies how the DSP48 columns are configured
coeff_padding Number of zero padding added to the front of the filter
© Copyright 2018 Xilinx
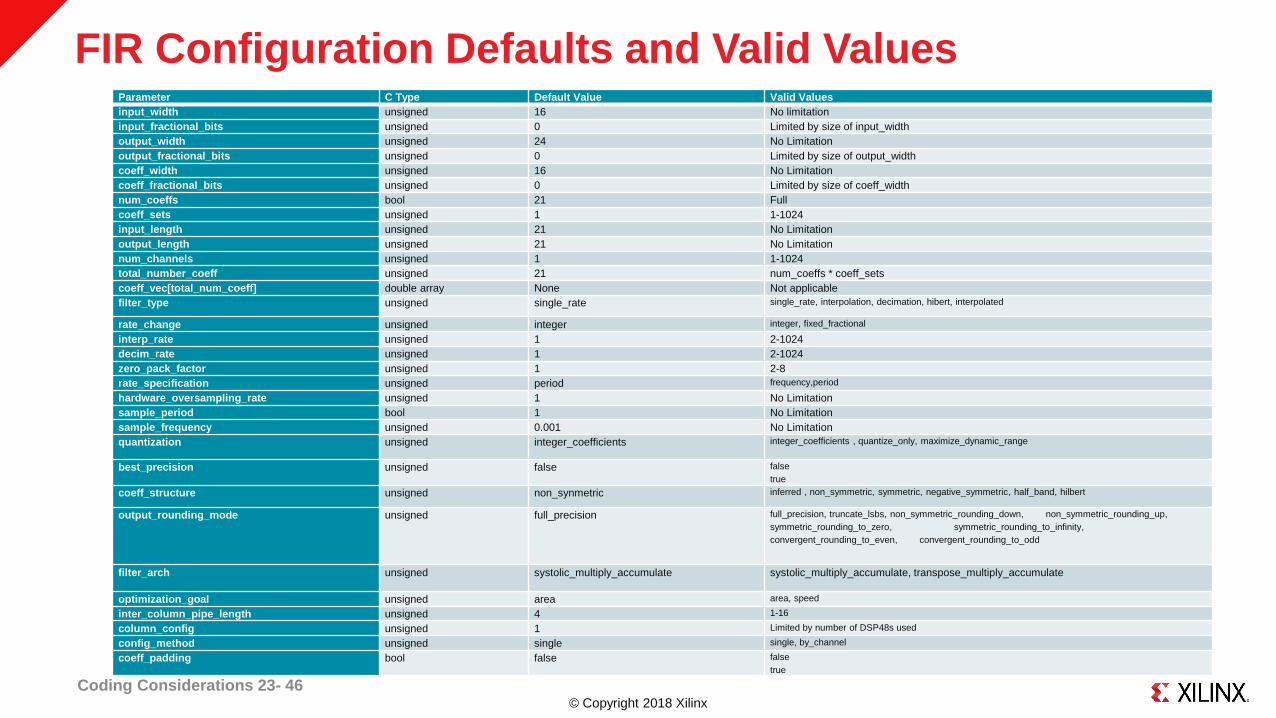
FIR Configuration Defaults and Valid Values
Coding Considerations 23- 46
Parameter C Type Default Value Valid Values
input_width unsigned 16 No limitation
input_fractional_bits unsigned 0 Limited by size of input_width
output_width unsigned 24 No Limitation
output_fractional_bits unsigned 0 Limited by size of output_width
coeff_width unsigned 16 No Limitation
coeff_fractional_bits unsigned 0 Limited by size of coeff_width
num_coeffs bool 21 Full
coeff_sets unsigned 1 1-1024
input_length unsigned 21 No Limitation
output_length unsigned 21 No Limitation
num_channels unsigned 1 1-1024
total_number_coeff unsigned 21 num_coeffs * coeff_sets
coeff_vec[total_num_coeff] double array None Not applicable
filter_type unsigned single_rate single_rate, interpolation, decimation, hibert, interpolated
rate_change unsigned integer integer, fixed_fractional
interp_rate unsigned 1 2-1024
decim_rate unsigned 1 2-1024
zero_pack_factor unsigned 1 2-8
rate_specification unsigned period frequency,period
hardware_oversampling_rate unsigned 1 No Limitation
sample_period bool 1 No Limitation
sample_frequency unsigned 0.001 No Limitation
quantization unsigned integer_coefficients integer_coefficients , quantize_only, maximize_dynamic_range
best_precision unsigned false false
true
coeff_structure unsigned non_synmetric inferred , non_symmetric, symmetric, negative_symmetric, half_band, hilbert
output_rounding_mode unsigned full_precision full_precision, truncate_lsbs, non_symmetric_rounding_down, non_symmetric_rounding_up,
symmetric_rounding_to_zero, symmetric_rounding_to_infinity,
convergent_rounding_to_even, convergent_rounding_to_odd
filter_arch unsigned systolic_multiply_accumulate systolic_multiply_accumulate, transpose_multiply_accumulate
optimization_goal unsigned area area, speed
inter_column_pipe_length unsigned 4 1-16
column_config unsigned 1 Limited by number of DSP48s used
config_method unsigned single single, by_channel
coeff_padding bool false false
true
© Copyright 2018 Xilinx
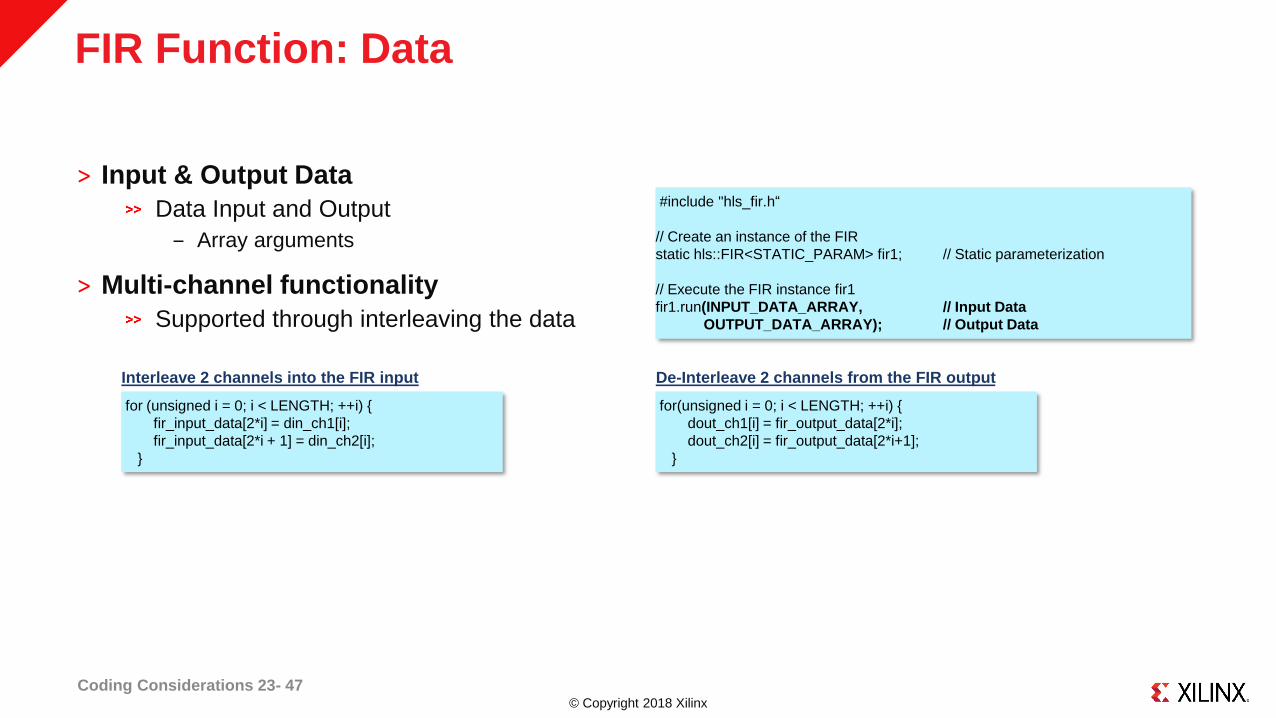
FIR Function: Data
˃ Input & Output Data
Data Input and Output
‒ Array arguments
˃ Multi-channel functionality
Supported through interleaving the data
Coding Considerations 23- 47
Interleave 2 channels into the FIR input De-Interleave 2 channels from the FIR output
#include "hls_fir.h“
// Create an instance of the FIR
static hls::FIR<STATIC_PARAM> fir1; // Static parameterization
// Execute the FIR instance fir1
fir1.run(INPUT_DATA_ARRAY, // Input Data
OUTPUT_DATA_ARRAY); // Output Data
for (unsigned i = 0; i < LENGTH; ++i) {
fir_input_data[2*i] = din_ch1[i];
fir_input_data[2*i + 1] = din_ch2[i];
}
for(unsigned i = 0; i < LENGTH; ++i) {
dout_ch1[i] = fir_output_data[2*i];
dout_ch2[i] = fir_output_data[2*i+1];
}
© Copyright 2018 Xilinx
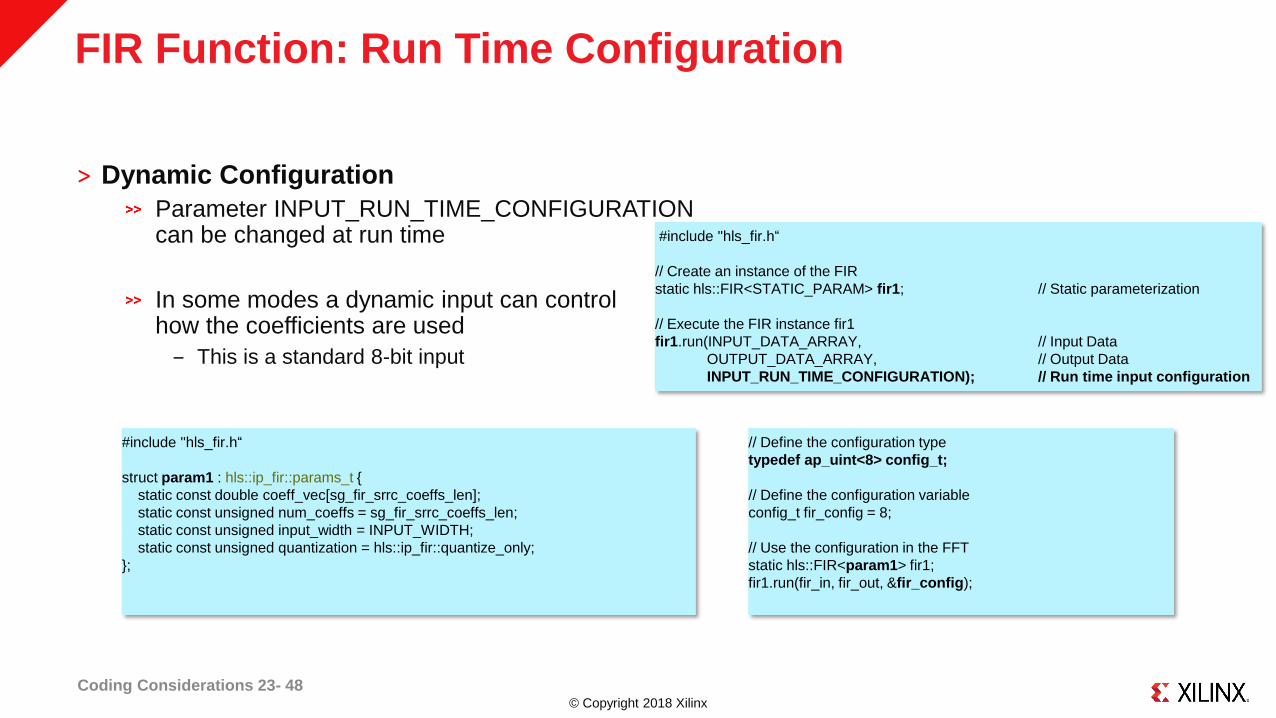
FIR Function: Run Time Configuration
˃ Dynamic Configuration
Parameter INPUT_RUN_TIME_CONFIGURATION can be changed at run time
In some modes a dynamic input can control how the coefficients are used
‒ This is a standard 8-bit input
Coding Considerations 23- 48
#include "hls_fir.h“
// Create an instance of the FIR
static hls::FIR<STATIC_PARAM> fir1; // Static parameterization
// Execute the FIR instance fir1
fir1.run(INPUT_DATA_ARRAY, // Input Data
OUTPUT_DATA_ARRAY, // Output Data
INPUT_RUN_TIME_CONFIGURATION); // Run time input configuration
#include "hls_fir.h“
struct param1 : hls::ip_fir::params_t {
static const double coeff_vec[sg_fir_srrc_coeffs_len];
static const unsigned num_coeffs = sg_fir_srrc_coeffs_len;
static const unsigned input_width = INPUT_WIDTH;
static const unsigned quantization = hls::ip_fir::quantize_only;
};
// Define the configuration type
typedef ap_uint<8> config_t;
// Define the configuration variable
config_t fir_config = 8;
// Use the configuration in the FFT
static hls::FIR<param1> fir1;
fir1.run(fir_in, fir_out, &fir_config);
© Copyright 2018 Xilinx
Using the FFT and FIR IP
˃ FFT and FIR support pipelined implementations
The functions themselves cannot be pipelined
They should be parameterized for pipelined operation
˃ The data arguments are always arrays
These will be implemented as AXI4 Streams in the RTL
‒ By default, arrays are implemented as BRAM interfaces
˃ Recommendation
Use these IP in regions where dataflow optimization is used
This will auto-convert the input and output arrays into streaming arrays
˃ Alternatively, a Requirement:
The input and output arrays must be marked as streaming using the command set_directive_stream (pragma STREAM)
Coding Considerations 23- 49
© Copyright 2018 Xilinx
Shift Registers
˃ Many C algorithms sequentially shift data through arrays
Add a new value to the start of the array,
Shift the existing data through array, and
Drop the oldest data value
˃ Common way to implement a shift register from C into hardware
Completely partition the array into individual elements, and allow the data dependencies between the elements in the RTL to imply a shift register
˃ SRL architectural resource is most efficient to implement the desired shift registers
When data is accessed in the middle of the shift register, logic synthesis cannot directly infer an SRL
Logic synthesis may implement the shift-resister in flip-flops, due to other factors
˃ Use the ap_shift_reg class
Coding Considerations 23- 50

© Copyright 2018 Xilinx
AP_SHIFT_REG Class
˃ Class AP_SHIFT_REG infers an SRL
Ensures that the behavior of an SRL component can be modeled in C
‒ Addressable shift register
Ensures that an SRL is in fact used in the implementation
‒ Guarantees that the high-performance Xilinx primitive is used
˃ Using the AP_SHIFT_REG
For use in C++ designs
Defined in the Vivado HLS tool header file ap_shift_reg.h
‒ Must be included
˃ SRL operations modeled in C
Supported in the C code
Addressable read from the shift register
Addressable read from the shift register and shift
Addressable read from the shift register and shift if enabled
Coding Considerations 23- 51
© Copyright 2018 Xilinx
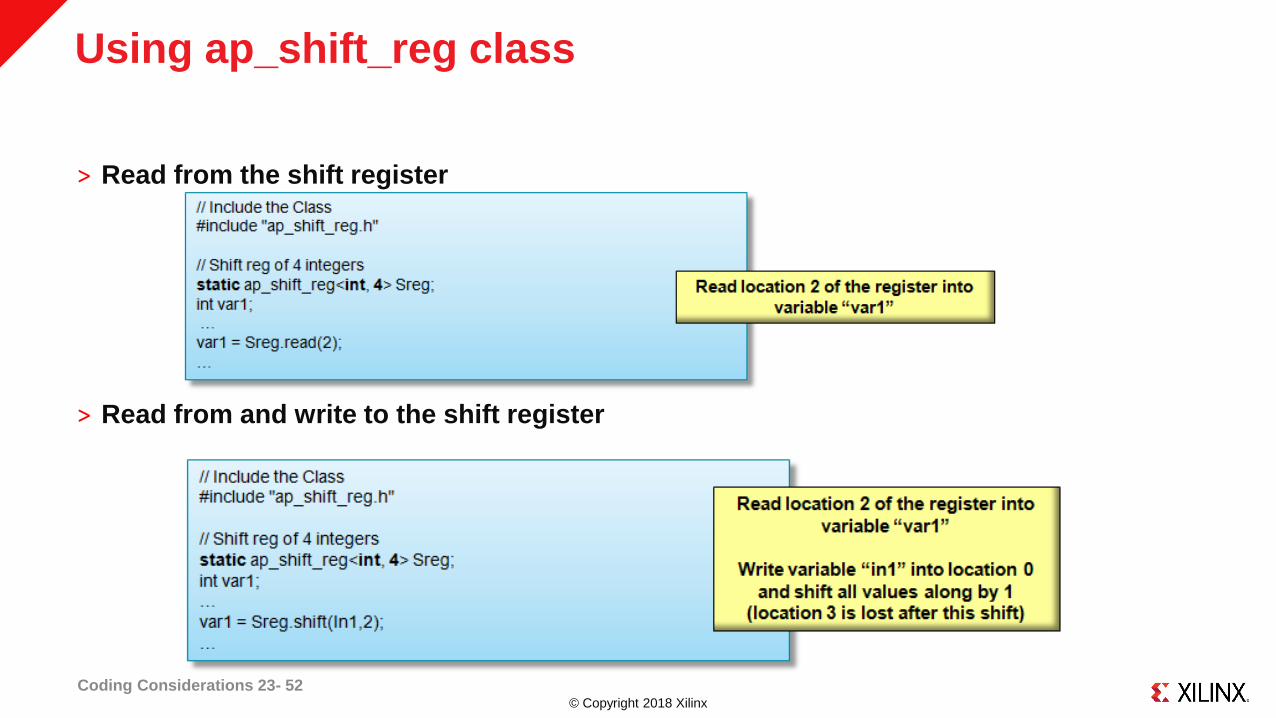
Using ap_shift_reg class
˃ Read from the shift register
˃ Read from and write to the shift register
Coding Considerations 23- 52
© Copyright 2018 Xilinx
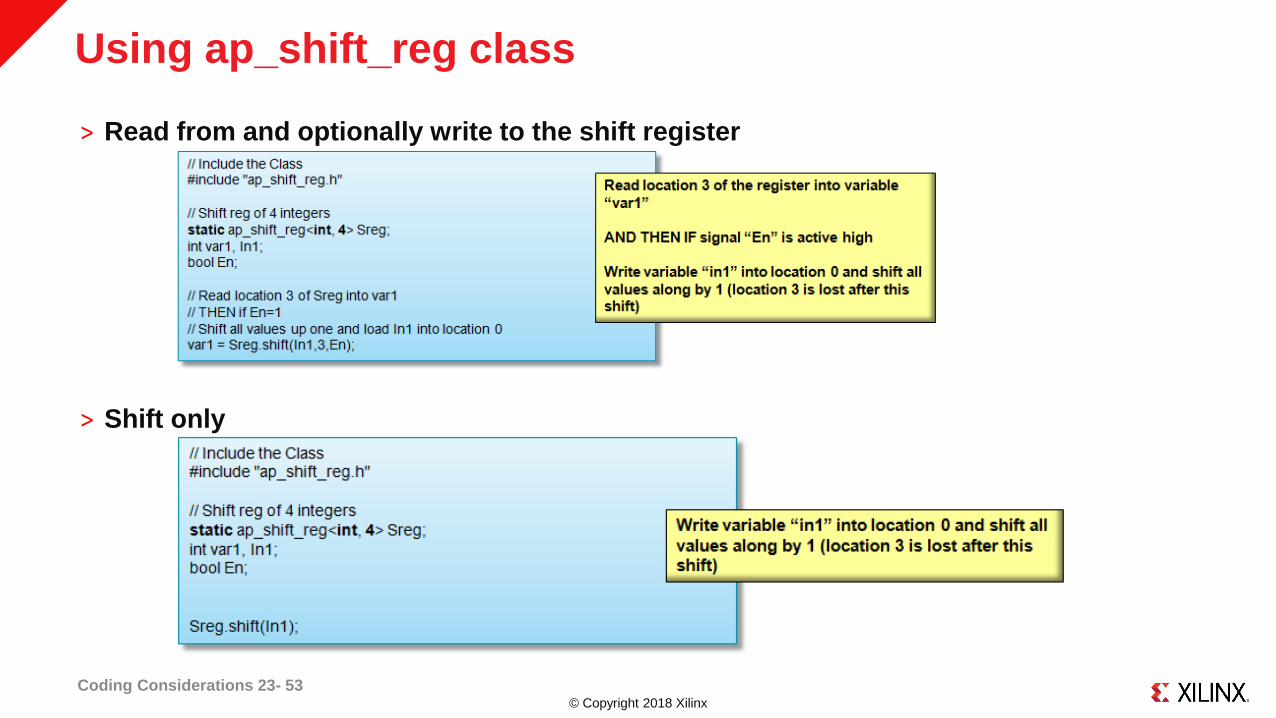
Using ap_shift_reg class
˃ Read from and optionally write to the shift register
˃ Shift only
Coding Considerations 23- 53
© Copyright 2018 Xilinx
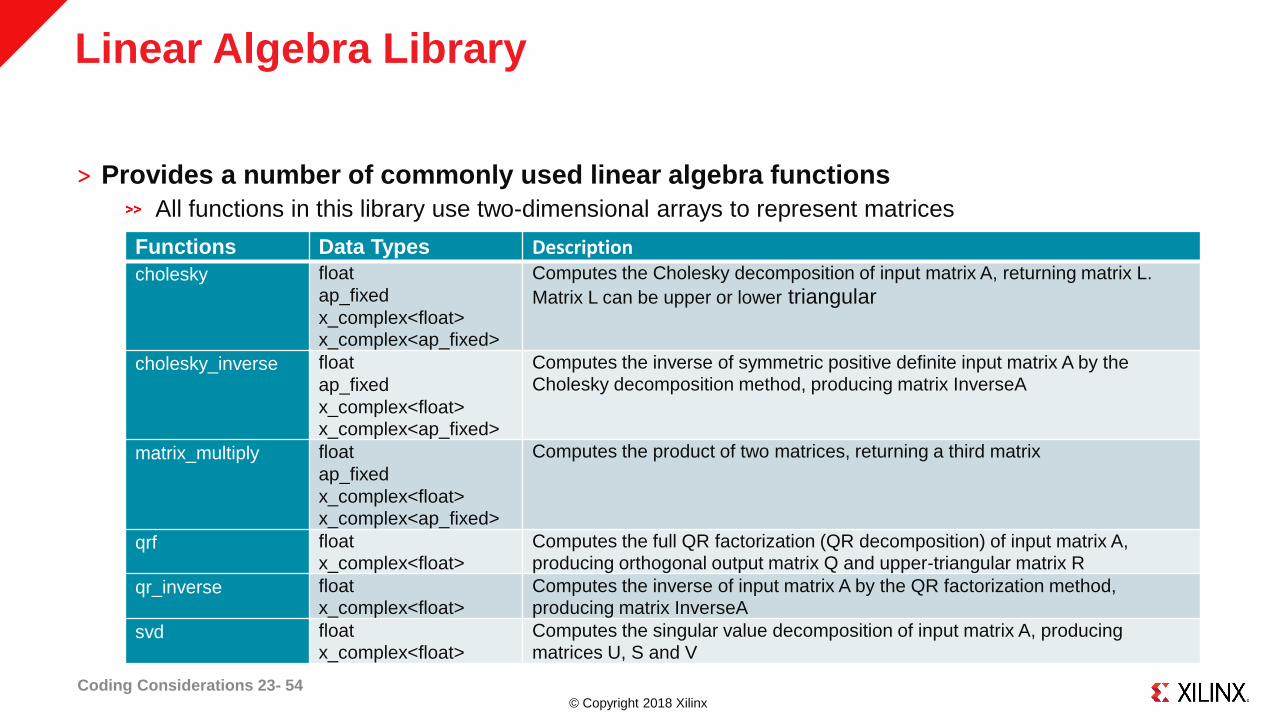
Linear Algebra Library
˃ Provides a number of commonly used linear algebra functions
All functions in this library use two-dimensional arrays to represent matrices
Coding Considerations 23- 54
Functions Data Types Description
cholesky float
ap_fixed
x_complex<float>x_complex<ap_fixed>
Computes the Cholesky decomposition of input matrix A, returning matrix L.
Matrix L can be upper or lower triangular
cholesky_inverse float
ap_fixed
x_complex<float>x_complex<ap_fixed>
Computes the inverse of symmetric positive definite input matrix A by the Cholesky decomposition method, producing matrix InverseA
matrix_multiply float
ap_fixed
x_complex<float>x_complex<ap_fixed>
Computes the product of two matrices, returning a third matrix
qrf floatx_complex<float>
Computes the full QR factorization (QR decomposition) of input matrix A, producing orthogonal output matrix Q and upper-triangular matrix R
qr_inverse floatx_complex<float>
Computes the inverse of input matrix A by the QR factorization method, producing matrix InverseA
svd floatx_complex<float>
Computes the singular value decomposition of input matrix A, producing matrices U, S and V

© Copyright 2018 Xilinx
Libraries Support -
OpenCV
© Copyright 2018 Xilinx
Video Libraries Supported in Vivado HLS
˃ C video libraries
Available within Vivado HLS tool header files
‒ hls_video.h library
‒ hls_opencv.h library
˃ Enable migration of OpenCV designs for use with the Vivado HLS tool
˃ HLS video library is intended to replace many basic OpenCV functions
Similar interfaces and algorithms to OpenCV
Focus on image processing functions implemented in FPGA fabric such as full HD video processing
Includes FPGA-specific optimizations
‒ Fixed-point operations instead of floating point
‒ On-chip line buffers and window buffers
Not necessarily bit-accurate
Libraries support standard AXI4 interfaces for easy system integration
Coding Considerations 23- 56
© Copyright 2018 Xilinx
Video Library Functions
˃ C++ code contained in hls namespace: #include “hls_video.h”
˃ Similar interface; equivalent behavior with OpenCV
OpenCV library: cvScale(src, dst, scale, shift);
HLS video library: hls::Scale<...>(src, dst, scale, shift);
˃ Some constructor arguments have corresponding or replacement template
parameters
OpenCV library: cv::Mat mat(rows, cols, CV_8UC3);
HLS video library: hls::Mat<ROWS, COLS, HLS_8UC3> mat(rows, cols);
‒ ROWS and COLS specify the maximum size of an image processed
Coding Considerations 23- 57
© Copyright 2018 Xilinx
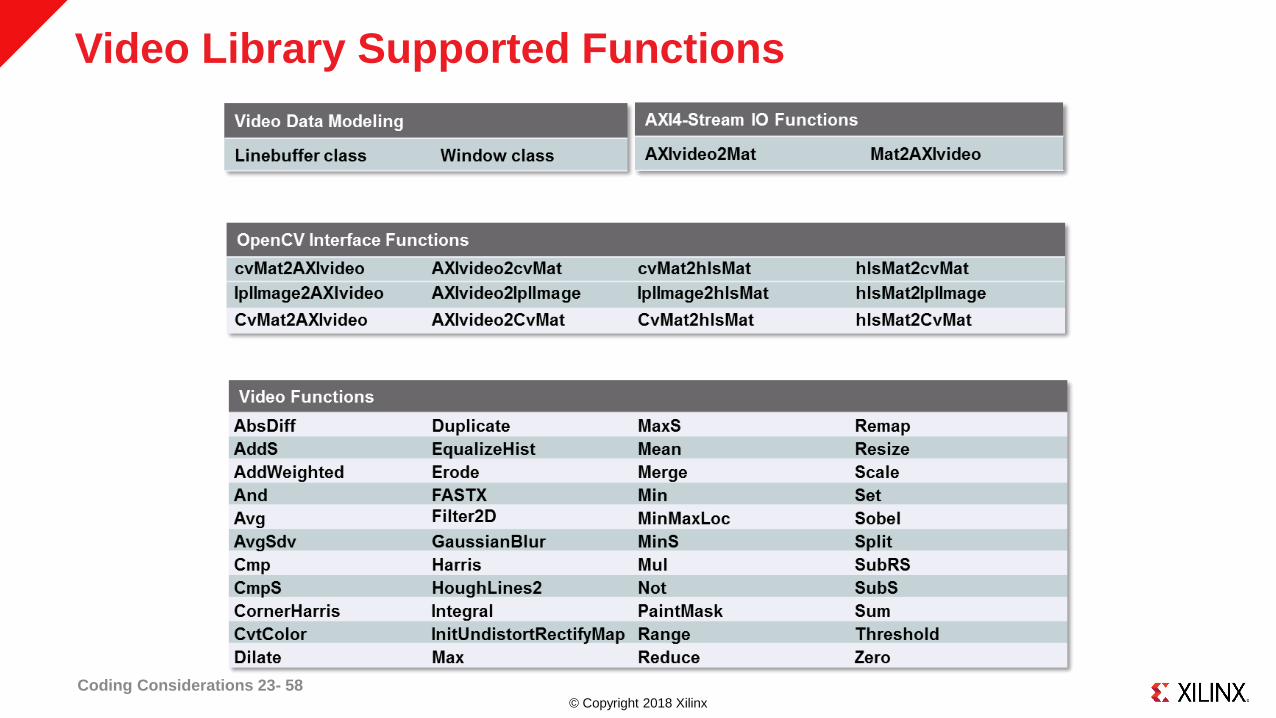
Video Library Supported Functions
Coding Considerations 23- 58
© Copyright 2018 Xilinx
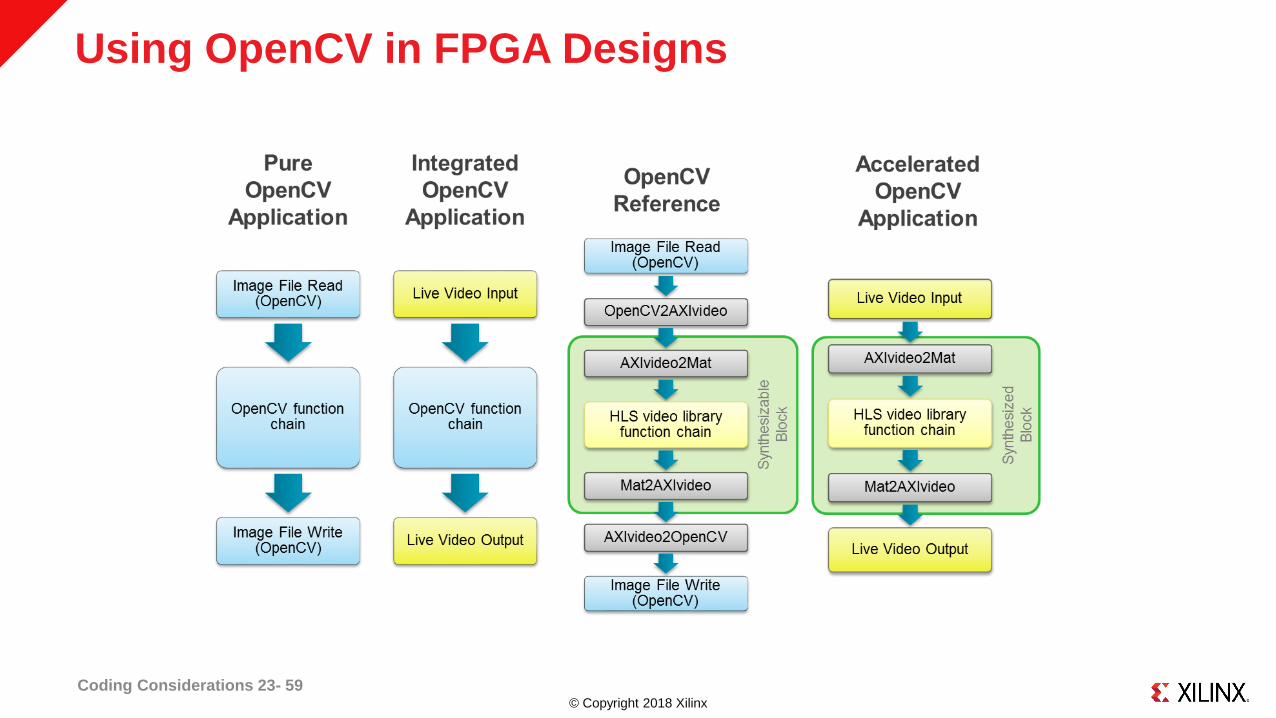
Using OpenCV in FPGA Designs
Coding Considerations 23- 59
© Copyright 2018 Xilinx
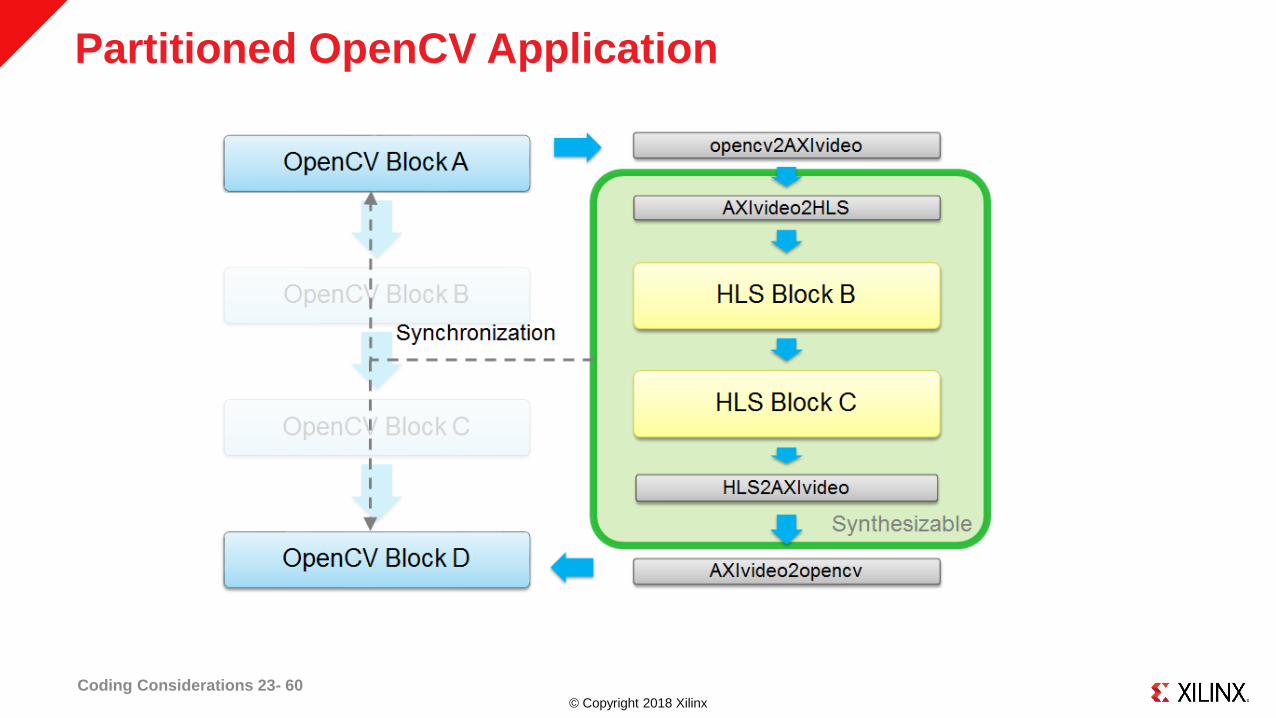
Partitioned OpenCV Application
Coding Considerations 23- 60
© Copyright 2018 Xilinx
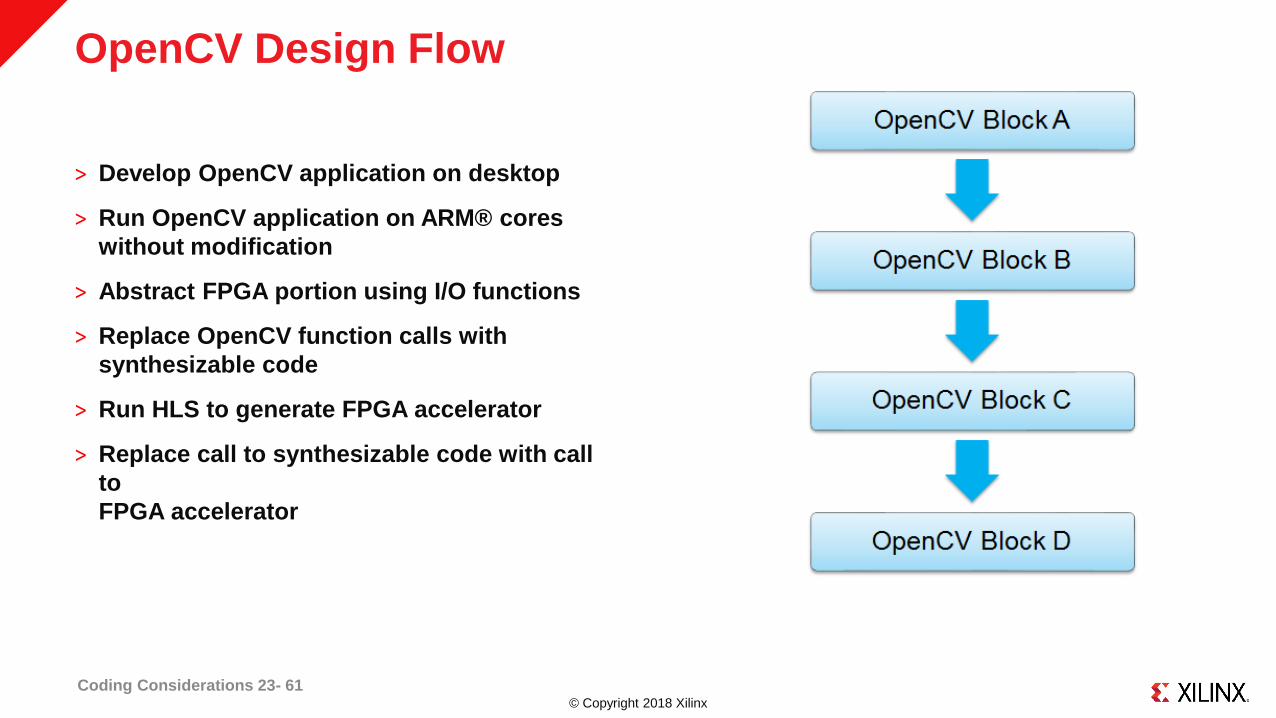
OpenCV Design Flow
˃ Develop OpenCV application on desktop
˃ Run OpenCV application on ARM® cores
without modification
˃ Abstract FPGA portion using I/O functions
˃ Replace OpenCV function calls with
synthesizable code
˃ Run HLS to generate FPGA accelerator
˃ Replace call to synthesizable code with call
to
FPGA accelerator
Coding Considerations 23- 61
© Copyright 2018 Xilinx
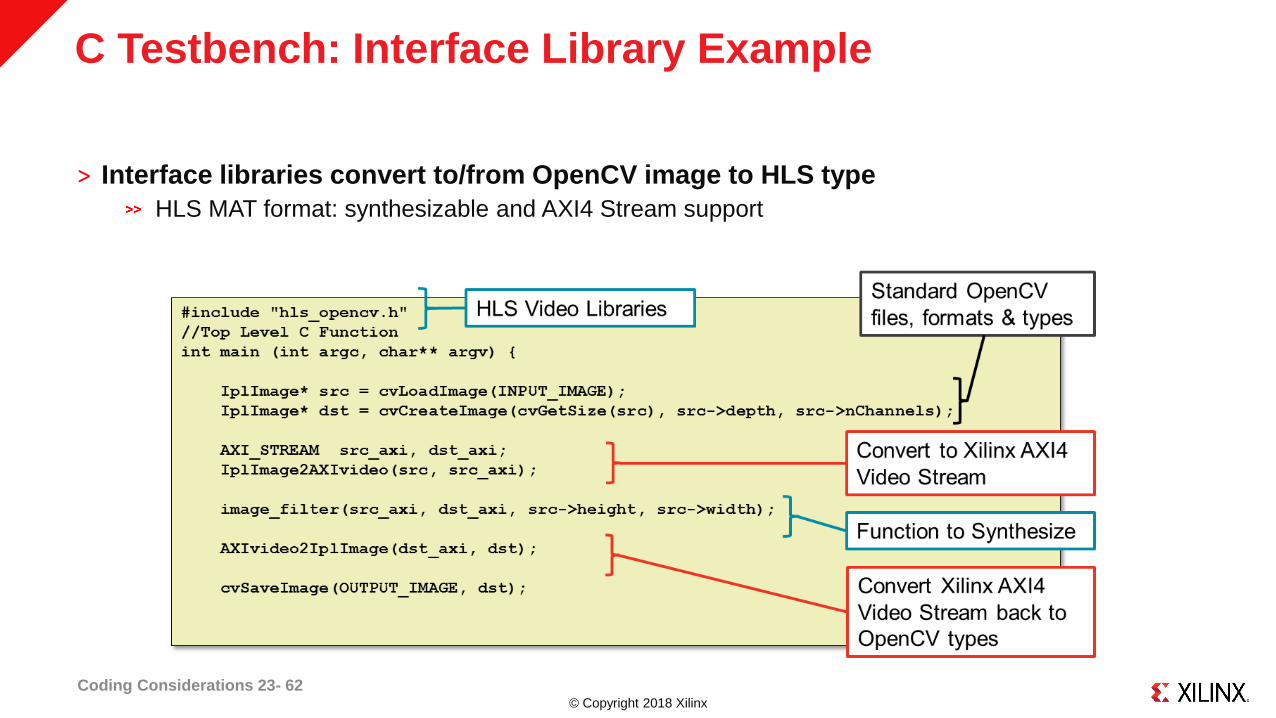
C Testbench: Interface Library Example
˃ Interface libraries convert to/from OpenCV image to HLS type
HLS MAT format: synthesizable and AXI4 Stream support
Coding Considerations 23- 62
© Copyright 2018 Xilinx
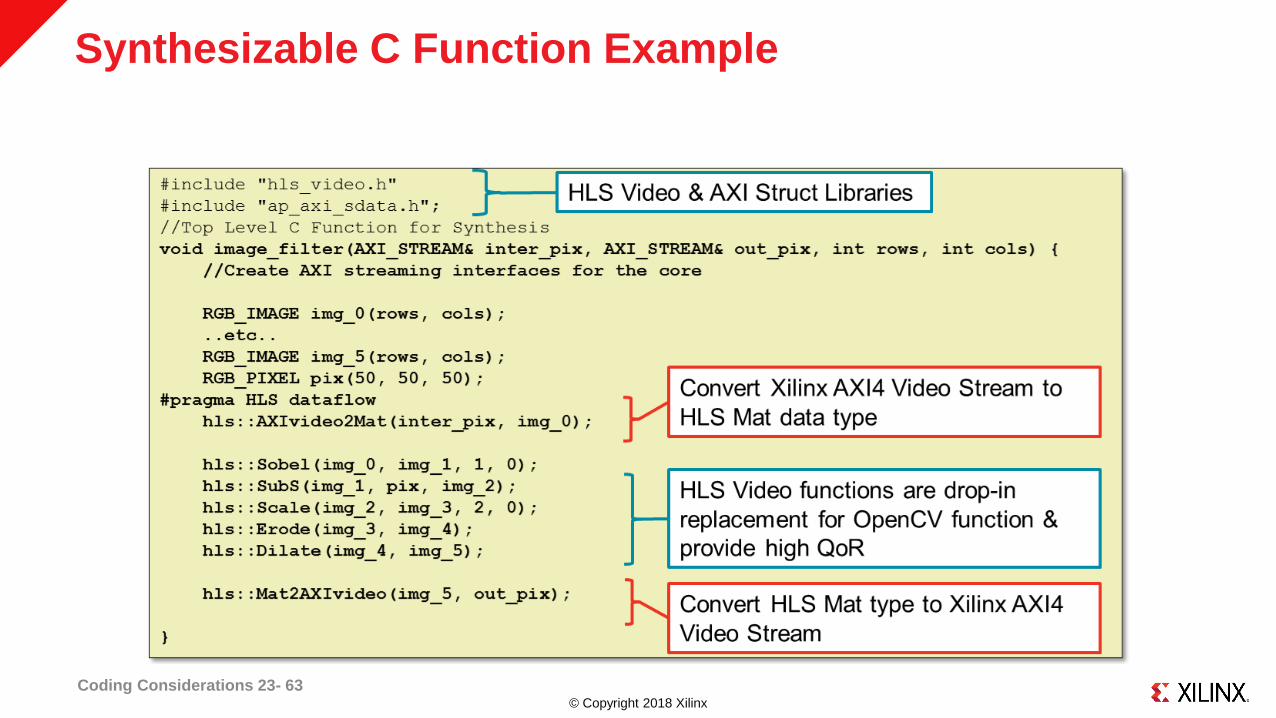
Synthesizable C Function Example
Coding Considerations 23- 63

© Copyright 2018 Xilinx
Summary
© Copyright 2018 Xilinx
Summary
˃ Vivado HLS supports C, C++, and SystemC
Vast majority of constructs are synthesizable provided they are statically defined at compile time
˃ Some of the unsupported constructs are
System calls and function pointer
Forward declared data type
Recursive type functions
Dynamic memory allocation
Dynamic virtual calls
Pointer reinterpretation
˃ Multi-access pointer is a pointer which is read and written to multiple times
Must be marked as volatile or reads and writes will be optimized away
Cannot be rigorously validated with C simulation
Require a depth specification for RTL simulation
Coding Considerations 23- 65
© Copyright 2018 Xilinx
Summary
˃ When struct is passed as a pointer the data are accessed as pass-by-reference
˃ When struct is not passed a pointer the data are accessed as by value
˃ When pointer arithmetic is performed, argument may be implemented as ap_bus or
ap_fifo
˃ Stream can be used instead of multiple-access pointer
˃ Vivado HLS provides support for FFT, FIR, SRL, and Linear Algebra
˃ Stream and shift registers classes may model and implement hardware better
˃ HLS video libraries
Drop-in replacement for OpenCV and provide high QoR
Coding Considerations 23- 66







