

Ton van den Bogert
Department of Mechanical Engineering
Cleveland State University
SPACE-TIME METHODS FOR
TRAJECTORY OPTIMIZATION

Motivation: design
• Devices for sports and rehabilitation
• Goal: improve human movement
• Design usually based on “normal
movement” data
• Human response is not considered or predicted
• Prototyping and human testing needed
• Predictive simulation of human movement
can speed up the development process
• Results must be good enough
• Results must be obtained quickly

Simulation of movement
• Model is represented by differential equation
• Simulation is normally done forward in time, e.g.
• This is appropriate for many applications
• But not always…
u)f(x,x
x: state variables
u: control inputs
)()()()( tththt u,xfxx Euler method
[t,x] = ODE23(’f’, x0) Matlab
variable step solver
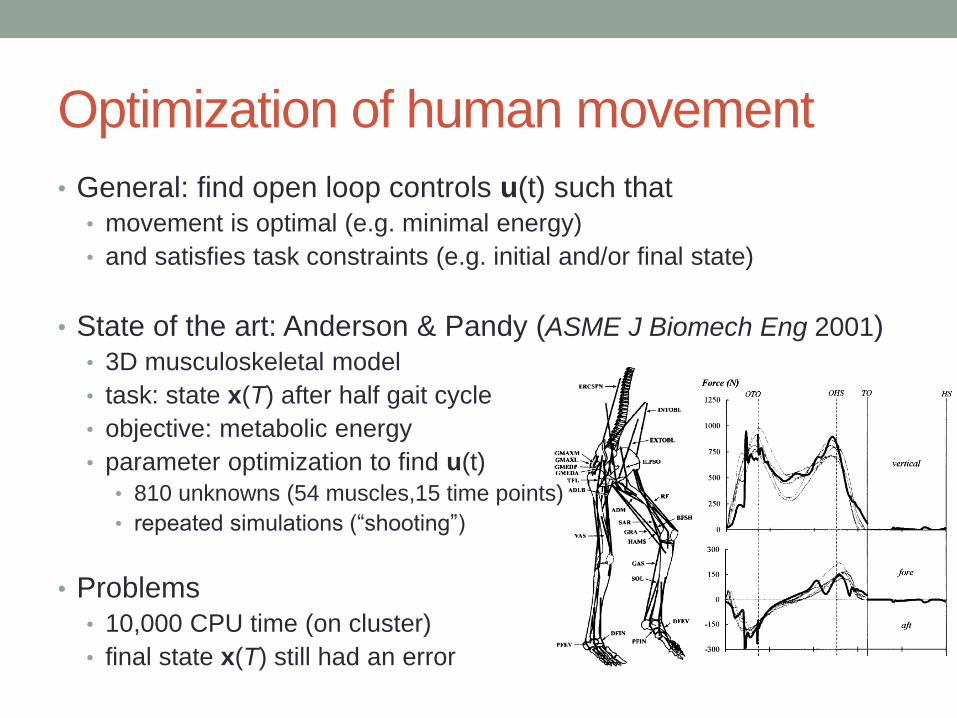
Optimization of human movement
• General: find open loop controls u(t) such that
• movement is optimal (e.g. minimal energy)
• and satisfies task constraints (e.g. initial and/or final state)
• State of the art: Anderson & Pandy (ASME J Biomech Eng 2001)
• 3D musculoskeletal model
• task: state x(T) after half gait cycle
• objective: metabolic energy
• parameter optimization to find u(t)
• 810 unknowns (54 muscles,15 time points)
• repeated simulations (“shooting”)
• Problems
• 10,000 CPU time (on cluster)
• final state x(T) still had an error
Spacetime methods
physics-based animation
“Because we extend the model through time as well as space, we
call the formulation spacetime constraints.”

The main idea
• Do not use simulation to find x(t)
• Iterate x(t) and u(t) until:
• movement is optimal
• satisfies task constraints
• satisfies physics constraints:
• Luxo lamp
• 2D, 6 DOF
• 3 torque actuators
• objective: minimal energy
• task: initial and final state
u)f(x,x
Book & aerospace applications

EXAMPLE: PENDULUM
SWING-UP

1-DOF pendulum
• Variables • angle x, torque u
• System dynamics:
• Task constraints for swing-up problem:
• Initial state
• Final state
• Cost function: integral of squared torque
x uxmgdxI sin
d
xd sin
mg
0)0(,0)0( xx 0)(,)( TxTx
T
dttu
0
2)(

Temporal discretization
• Direct collocation: N nodes
• Time step
• States controls
• Dynamics becomes algebraic constraints:
• Cost function becomes an algebraic function:
• Time step h usually much larger than in ODE solver • Convergence study to decide how many nodes are needed
• For human gait cycle: N=50 or N=100 is typically good enough
uxmgdxI sin iiiii uxmgd
h
xxxI
sin2
2
11
i
iu2
Nxxx 21, Nuuu 21,
t
x(t)
u(t)
t
h
1 2 3 … N
)1/( NTh

Constrained optimization problem
• Unknowns
• Minimize
• Subject to
• Matlab solvers for this type of problem:
• fmincon sequential quadratic programming
• SNOPT sequential quadratic programming (large scale)
• IPOPT interior point method (large scale)
TNN uuuxxx 2121 ,,,y
)(yf
0)( yc
cost function
task constraints and dynamics constraints
Matlab demo
using the Matlab code in pend.m

GAIT

Planar musculoskeletal gait model
• 7 body segments, 9 DOF
• 16 Hill-based muscles
• Matlab MEX function
• download at Dynamic Walking 2011
• Find optimal gait
• objective function?
u)f(x,x
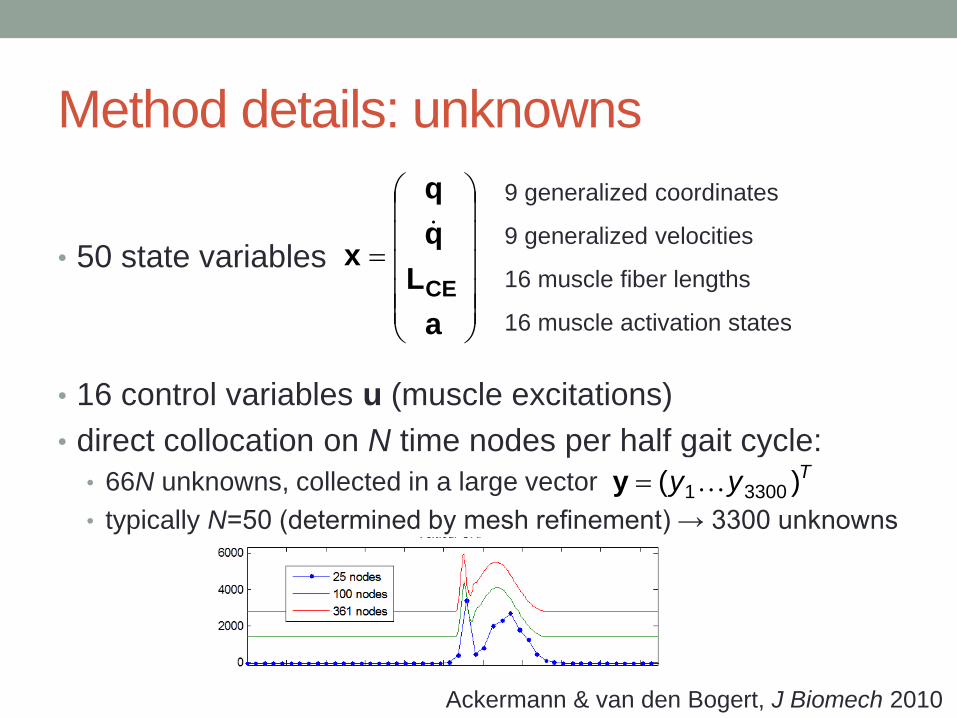
Method details: unknowns
• 50 state variables
• 16 control variables u (muscle excitations)
• direct collocation on N time nodes per half gait cycle:
• 66N unknowns, collected in a large vector
• typically N=50 (determined by mesh refinement) → 3300 unknowns
Ackermann & van den Bogert, J Biomech 2010
a
L
q
q
xCE
9 generalized coordinates
9 generalized velocities
16 muscle fiber lengths
16 muscle activation states
Tyy )( 33001y
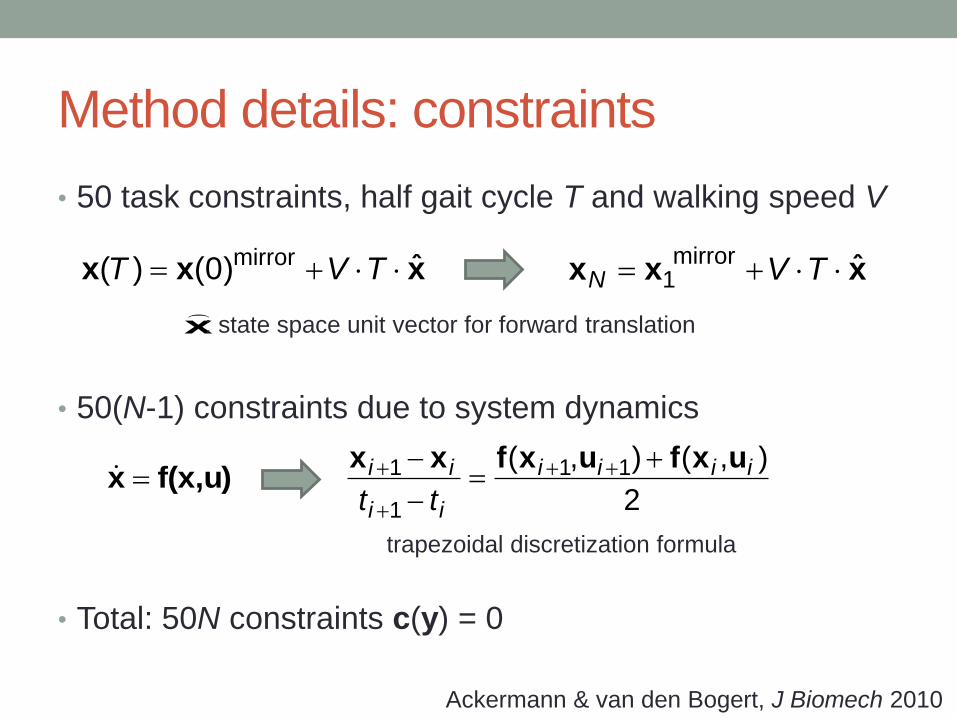
Method details: constraints
• 50 task constraints, half gait cycle T and walking speed V
• 50(N-1) constraints due to system dynamics
• Total: 50N constraints c(y) = 0
Ackermann & van den Bogert, J Biomech 2010
x
xxx ˆmirror1 TVNxxx ˆ)0()( mirror TVT
: state space unit vector for forward translation
u)f(x,x 2
),(),( 11
1
1 iiii
ii
ii
tt
uxfuxfxx
trapezoidal discretization formula

Method details: objective function
(cost function)
• For example, activation-based, M muscles:
• General form:
Ackermann & van den Bogert, J Biomech 2010
N
i
M
j
pj
jij
awwNM
f1 1
1
)(yf
wj: weighting of muscle j
exponent p = 2,3,…
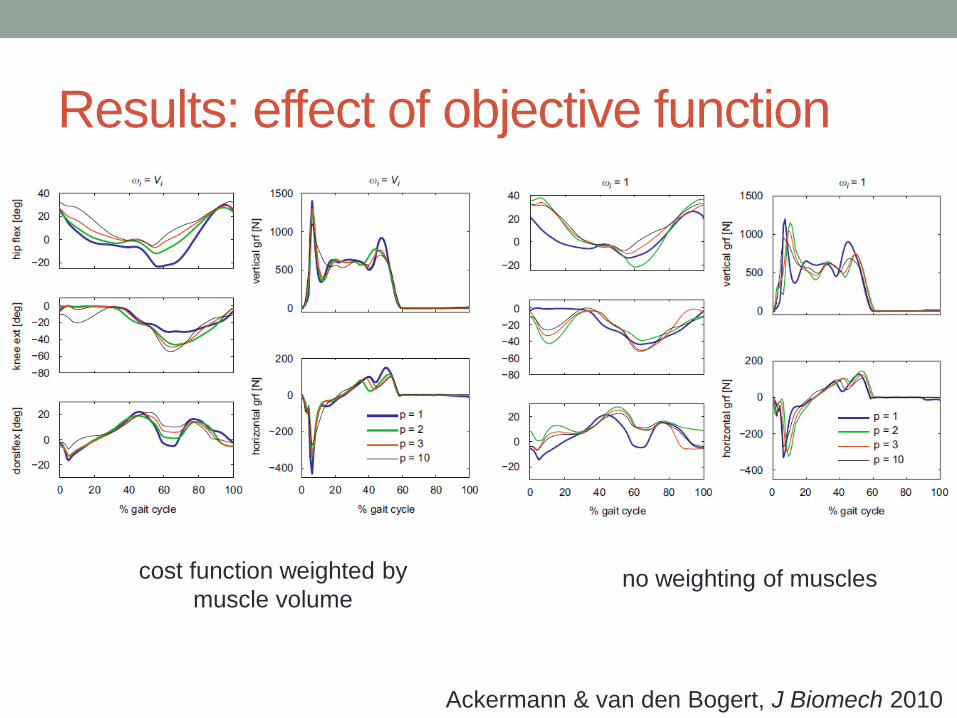
Results: effect of objective function
Ackermann & van den Bogert, J Biomech 2010
cost function weighted by
muscle volume no weighting of muscles
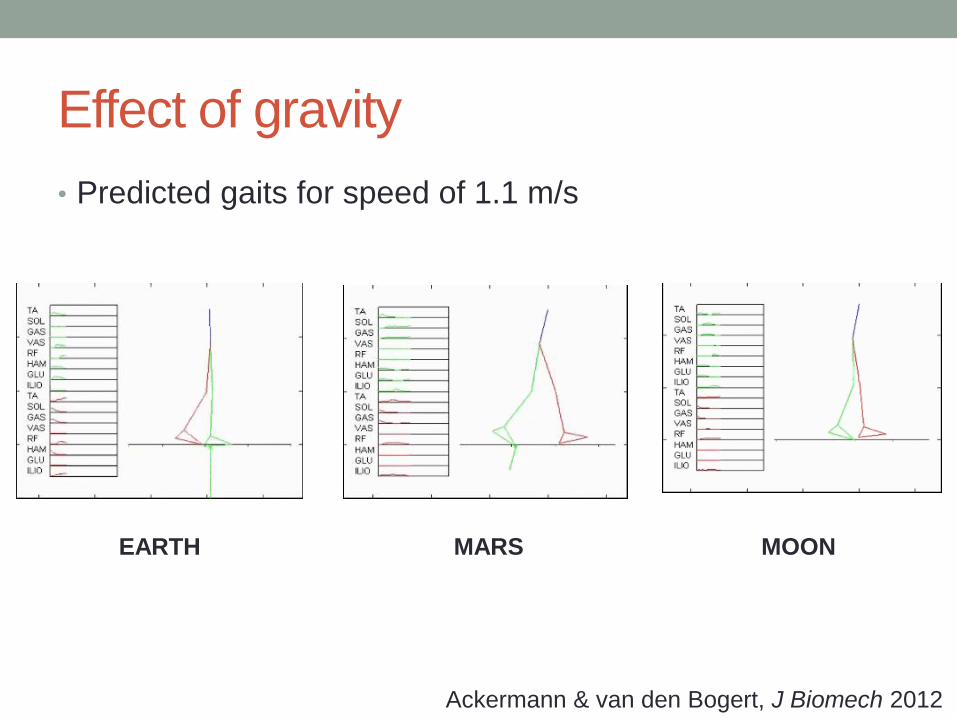
Effect of gravity
• Predicted gaits for speed of 1.1 m/s
Ackermann & van den Bogert, J Biomech 2012
EARTH MARS MOON

METHOD IMPROVEMENTS
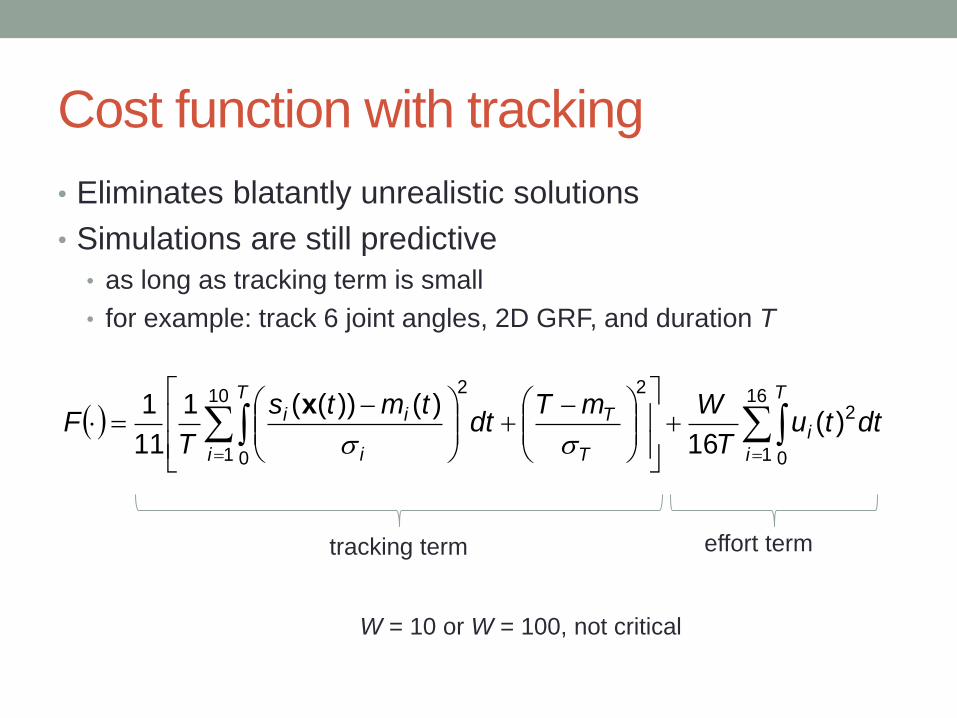
Cost function with tracking
• Eliminates blatantly unrealistic solutions
• Simulations are still predictive
• as long as tracking term is small
• for example: track 6 joint angles, 2D GRF, and duration T
16
1 0
210
1 0
22
)(16
)())((1
11
1
i
T
i
i
T
T
T
i
ii dttuT
WmTdt
tmts
TF
x
tracking term effort term
W = 10 or W = 100, not critical

Combined human/device model
• Hydraulic energy-storing knee
• Simultaneous optimal control of 10 muscles and 2 valves
prosthetic side (blue curves):
knee function is not restored
but it is the ankle’s fault!
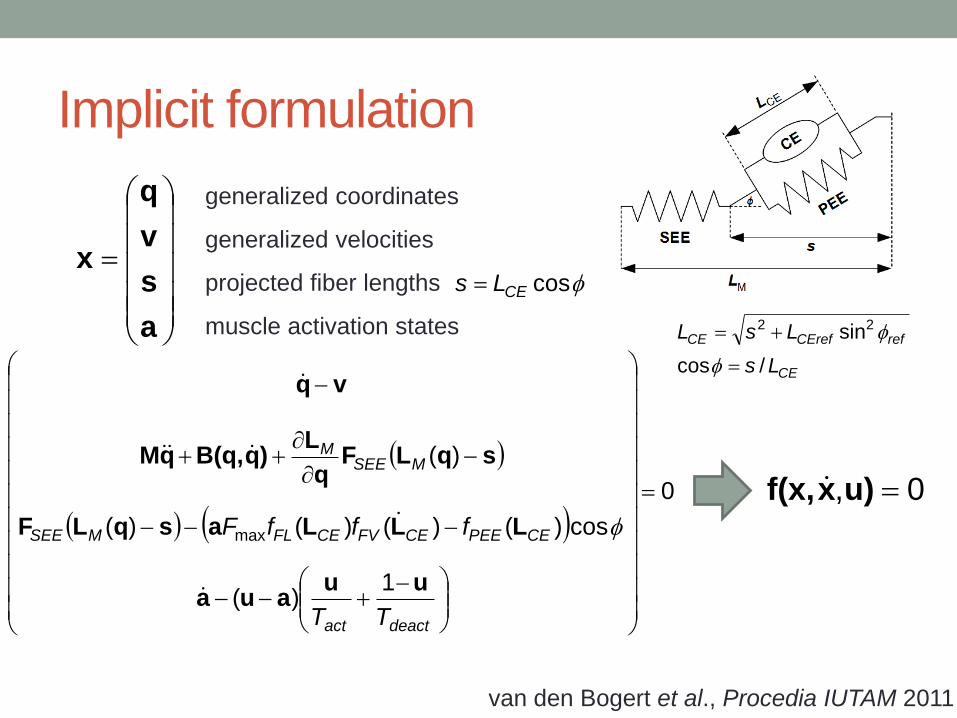
Implicit formulation
van den Bogert et al., Procedia IUTAM 2011
0, u)xf(x,
a
s
v
q
x
generalized coordinates
generalized velocities
projected fiber lengths
muscle activation states
cosCELs
0
1)(
cos)()()()(
)(
max
deactact
CEPEECEFVCEFLMSEE
MSEEM
TT
fffF
uuaua
LLLasqLF
sqLFq
L)qB(q,qM
vq
CE
refCErefCE
Ls
LsL
/cos
sin22
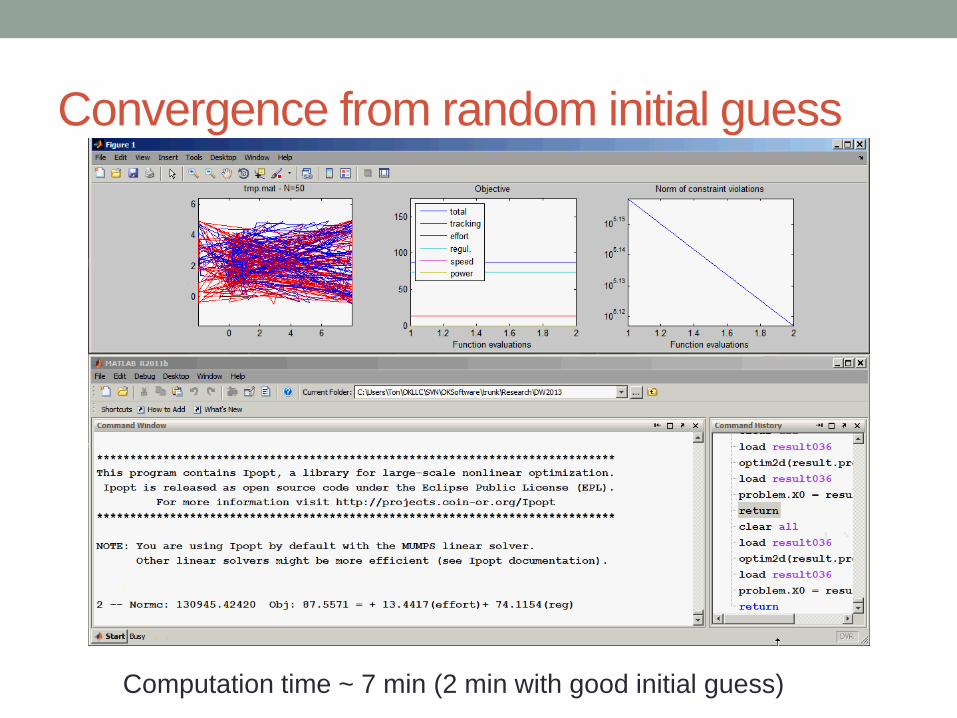
Convergence from random initial guess
Computation time ~ 7 min (2 min with good initial guess)

19 runs with random initial guess
• 3 runs did not converge
• 3 runs found the same solution (with cost 0.07)
• was also found from “intelligent” initial guesses
• 13 locally optimal solutions with higher cost
cost 0.071 cost 0.158

Discovering strategies for novel tasks
• Walk with a somersault in each step:
• Solution could only be found from random initial guess
31ˆ2ˆ0 xxxx TvT
mirror

Summary
• Trajectory optimization • in biomechanics known as “predictive simulation” because it can be
done without tracking human motion data
• direct collocation method was presented
• can include “hard” task constraints
• Many unknowns: discretized state and control trajectories • must use gradient-based solvers
• can fail to converge
• can even fail to produce a movement that is physically possible
• even if converged, solution can be a local optimum
• Trajectory optimization finds optimal open loop controls • this is not yet a controller!







