
Vision Computing
An Introduction

Visual Perception
• Sight is our most impressive sense. It gives us, without conscious effort, detailed information about the shape of the world around us
• The main focus will be on the processing of the raw information that they provide.
• The basic approach : understand how sensory stimuli are created by the world, and then ask what must the world have been like to produce this particular stimulus?

Human, Computer and Machine Vision
• the key elements – automatic extraction, manipulation, analysis
and classification of images or image sequences
• to solve real-world problems requires an appreciation of all the issues involved.
• computer and machine vision

What is “Image Processing and Computer Vision”?
Image Processingmanipulate image datagenerate another image
Computer Visionprocess image data
generate symbolic data

Image Resolution
• How many pixels– spatial resolution
• How many shades of grey/colours– amplitude resolution
• How many frames per second– temporal resolution

Spatial Resolution
n, n/2, n/4, n/8, n/16 and n/32 pixels on a side.

Shades of Grey
8, 4, 2 and 1 bit images.

Temporal Resolution
– how much does an object move between frames?
– Can motion be understood unambiguously?
• Nyquist’s Theorem– A periodic signal can be reconstructed if the
sampling interval is half the period– An object can be detected if two samples span
its smallest dimension

Colour Representation
• Newton– white light composed of seven colours
• red, orange, yellow, green, blue, indigo, violet
• three primaries could approximate many colours
• red, green, blue
• C= rR+gG+bB

Other Colour Models
• YMCK
• IHS
• YCrCb
• etc

Camera Calibration
• Link image co-ordinates and world co-ordinates
• Extrinsic parameters– location and orientation of camera with respect
to a co-ordinate frame
• Intrinsic parameters– relate pixel co-ordinates with camera reference
frame co-ordinates

Pinhole Camera
Image
ObjectOpticalcentre
Image and centre, object and centre are similar triangles.
f Z
Z
Yfy
Z
Xfx



How Do We Recover 3-D Information?
• There are number of cues available in the visual stimulus– Motion– Binocular stereopsis– Texture– Shading– Contour
• Each of these cues relies on background assumptions about physical scenes in order to provide unambiguous interpretation.

Assumption about the scene
• how to ‘invert’ the process of image formation - assign physical interpretations to the optical features found in the image, in spite of the ambiguities.– About the physical world (low level/early)– About what the machine is looking at (high
level/late)– Mapping from low level to high level– An assumption is worth making by a visual system
is often that the human visual system makes it.

Image Data Processing
• Simulate human image perception• pre-processing:
– Noise removal, contrast enhancement etc.
• Low level – find useful info from raw images– Colour, edges, shape, texture detection
• High level – find objects and meanings from the useful info– Objects– Spatial relationship– Meanings
• The higher level processing, the more domain knowledge needed
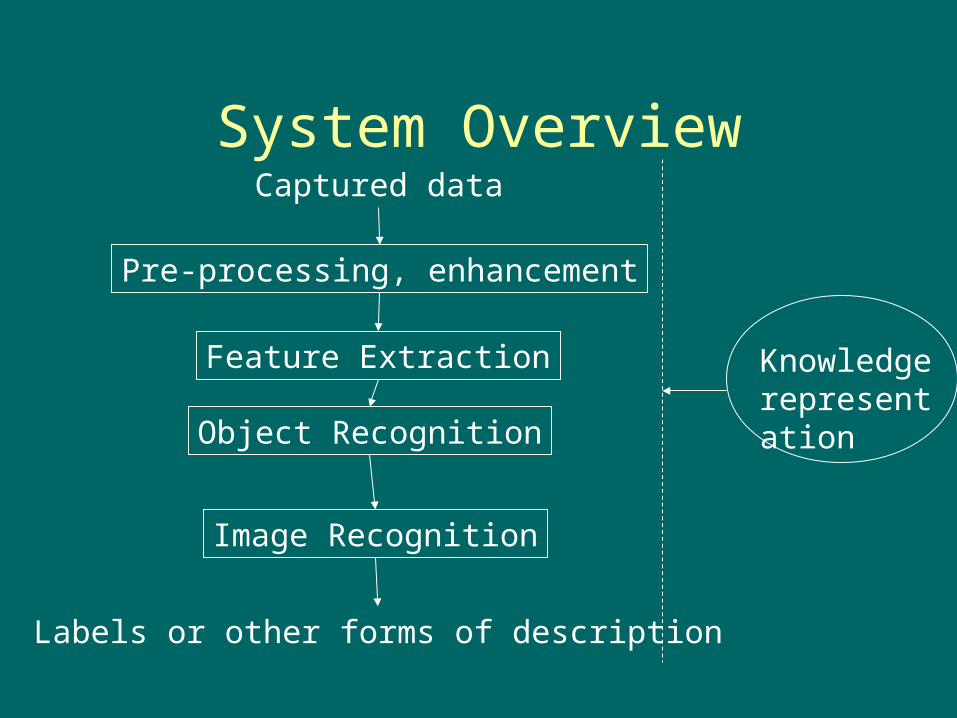
System Overview
Feature Extraction
Labels or other forms of description
Pre-processing, enhancement
Object Recognition
Image Recognition
Captured data
Knowledge representation

Image Processing

Image Analysis

Image Classification
Image classification examples
Example reference :
http://elib.cs.berkeley.edu/photos/classify/

What’s Next
• More examples on approaching “seeing things” in daily life
• Examples of approaching these problems in programmes
• Getting familiar with methodologies for providing intelligence in systems







