dsp108-06 kontroler dsp - website personalpersonal.its.ac.id/files/material/2540-jos-ee-dsp108-06...
TRANSCRIPT
1Dasar Sistem Pengaturan - 06
TE091346 Dasar Sistem Pengaturan
Kontroler
Ir. Jos Pramudijanto, M.Eng.Jurusan Teknik Elektro FTI ITS
Telp. 5947302 Fax.5931237Email: [email protected]
2Dasar Sistem Pengaturan - 06
Objektif:
Definisi KontrolerStruktur KontrolerKontroler PIDPerancangan Kontroler
3Dasar Sistem Pengaturan - 06
KONTROLER
Kontroler merupakan salah satu komponen sistemyang berfungsi mengolah sinyal umpan balik dansinyal referensi menjadi sinyal kontrol sedemikianrupa sehingga performansi dari sistem yang dikendalikannya sesuai dengan spesifikasiperformansi yang di inginkan.
4Dasar Sistem Pengaturan - 06
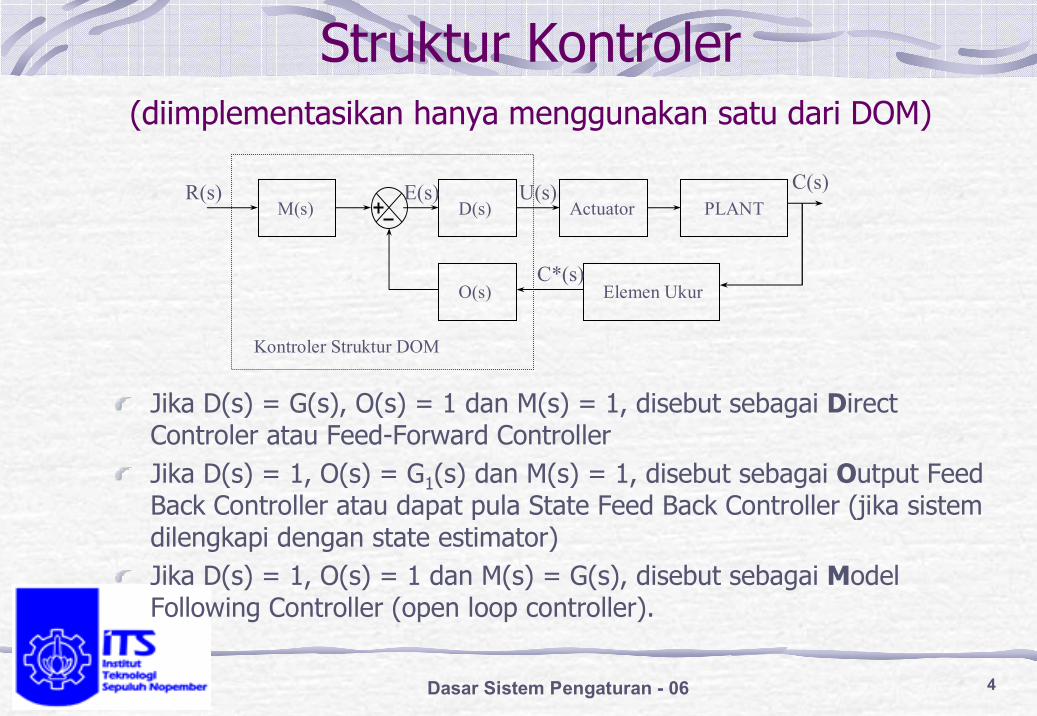
Struktur Kontroler(diimplementasikan hanya menggunakan satu dari DOM)
M(s) Actuator
O(s)
D(s) PLANT
Elemen Ukur
Kontroler Struktur DOM
R(s) C(s)E(s) U(s)
C*(s)
Jika D(s) = G(s), O(s) = 1 dan M(s) = 1, disebut sebagai Direct Controler atau Feed-Forward Controller Jika D(s) = 1, O(s) = G1(s) dan M(s) = 1, disebut sebagai Output Feed Back Controller atau dapat pula State Feed Back Controller (jika sistem dilengkapi dengan state estimator)Jika D(s) = 1, O(s) = 1 dan M(s) = G(s), disebut sebagai Model Following Controller (open loop controller).
5Dasar Sistem Pengaturan - 06
Kontroler P-I-DMerupakan kontroler feed-forward yang berfungsi mengolahsinyal eror menjadi sinyal kontrol, di mana hubungan sinyalkontrol terhadap sinyal eror dapat proporsional, integral, diferensial atau gabungan diantaranya. Berdasarkan bentuk hubungan sinyal eror dan sinyal kontrol, kontroler ini dibedakan atas beberapa tipe, antara lain:
• Kontroler tipe-P (Proportional Controller)• Kontroler tipe-PI (Proportional + Integral Controller)• Kontroler tipe-PD (Proportional + Derivative Controller)• Kontroler tipe-PID (Proportional + Integral + Derivative
Controller)
6Dasar Sistem Pengaturan - 06
Kontroler tipe-P (Proportional Controller)Hubungan sinyal eror dan sinyal kontrol pada kontroler tipe-Pdapat dinyatakan sebagai berikut:
Dalam bentuk diagram balok, kontroler tipe-P ini digambarkansebagai:
KPE(s) U(s)
P
P
KsEsU
functiontransferbentukdalamatauteKtu
=
=
)()(
,)()(
7Dasar Sistem Pengaturan - 06
Kontroler tipe-PI (Proportional + Integral Controller)
Hubungan sinyal eror dan sinyal kontrol pada kontroler tipe-PIdapat dinyatakan sebagai berikut:
Dalam bentuk diagram balok, kontroler tipe-PI ini digambarkansebagai:
ssK
sEsUatau
sK
sEsU
functiontransferbentukdalamatau
dtteteKtu
I
IP
IP
IP
ττ
τ
τ
)1()()()11(
)()(
,
])(1)([)(
+=+=
+= ∫
E(s) U(s)ssK
I
IP
ττ )1( +
8Dasar Sistem Pengaturan - 06
Kontroler tipe-PD(Proportional + Derivative Controller)
Hubungan sinyal eror dan sinyal kontrol pada kontroler tipe-PDdapat dinyatakan sebagai berikut:
Dalam bentuk diagram balok, kontroler tipe-PD inidigambarkan sebagai:
)1()()(
,
)]()([)(
+=
+=
sKsEsU
functiontransferbentukdalamatau
tedtdteKtu
DP
DP
τ
τ
E(s) U(s))1( +sK DP τ
9Dasar Sistem Pengaturan - 06
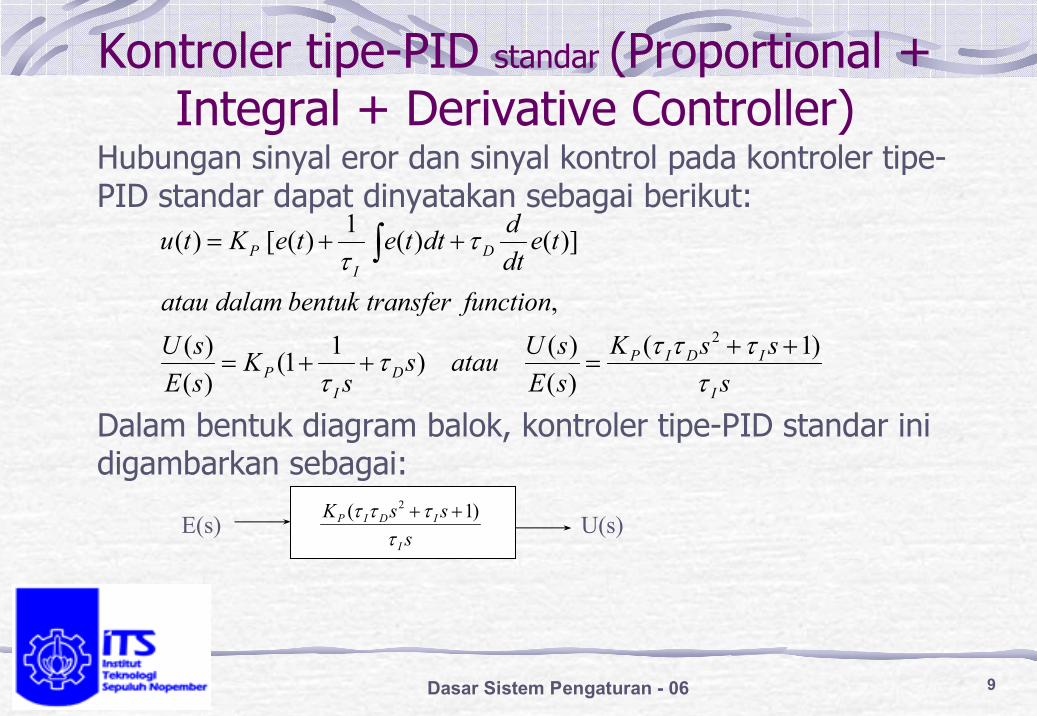
Kontroler tipe-PID standar (Proportional + Integral + Derivative Controller)
Hubungan sinyal eror dan sinyal kontrol pada kontroler tipe-PID standar dapat dinyatakan sebagai berikut:
Dalam bentuk diagram balok, kontroler tipe-PID standar inidigambarkan sebagai:
sssK
sEsUataus
sK
sEsU
functiontransferbentukdalamatau
tedtddtteteKtu
I
IDIPD
IP
DI
P
τττττ
τ
ττ
)1()()()11(
)()(
,
)]()(1)([)(
2 ++=++=
++= ∫
E(s) U(s)sssK
I
IDIP
ττττ )1( 2 ++
10Dasar Sistem Pengaturan - 06
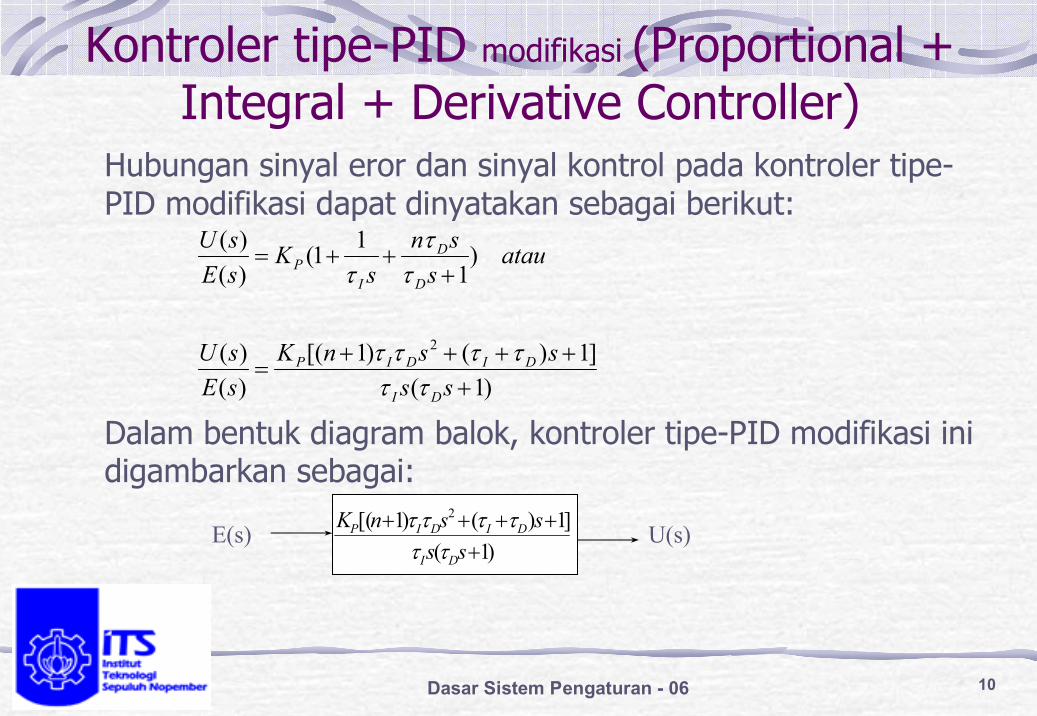
Kontroler tipe-PID modifikasi (Proportional + Integral + Derivative Controller)
Hubungan sinyal eror dan sinyal kontrol pada kontroler tipe-PID modifikasi dapat dinyatakan sebagai berikut:
Dalam bentuk diagram balok, kontroler tipe-PID modifikasi inidigambarkan sebagai:
)1(]1)()1[(
)()(
)1
11()()(
2
+++++
=
+++=
ssssnK
sEsU
ataussn
sK
sEsU
DI
DIDIP
D
D
IP
ττττττ
ττ
τ
E(s) U(s))1(
]1)()1[( 2
+++++
ssssnK
DI
DIDIP
ττττττ
11Dasar Sistem Pengaturan - 06
Perancangan Kontroler PIDJika dilihat dari derajat (orde) persamaan diferentialyang menghubungkan input output kontroler, kontroler P-I-D dapat dirancang menjadi kontrolerorde nol (tipe P), orde kesatu (tipe PI dan PD) atauorde kedua (tipe PID). Oleh karena itu secara teoritiskontroler ini dapat diterapkan untuk mengendalikanplant orde kesatu atau orde kedua saja. Akan tetapikarena sistem/plant di industri umumnya merupakansistem orde tinggi yang dapat direduksi menjadisistem orde kesatu atau orde kedua, kontroler P-I-D banyak di implementasikan di industri.
12Dasar Sistem Pengaturan - 06
Perancangan Kontroler PIDPerancangan dengan pendekatan respon waktu
• Direct Synthesis (perancangan analitik dengan SpesifikasiRespon Orde I dan Orde II)
• Metode Ziegler-Nichols• Perancangan dengan Root Locus melalui pendekatan
geometrisPerancangan dengan pendekatan respon frekwensi
• Metode analitik melalui Diagram Bode Perancangan analitikdengan Spesifikasi Respon Orde I dan Orde II
• Perancangan PI/PD menggunakan teknik PerancanganKompensator Lead/Lag melalui Diagram Bode