e5 lecture 7 - swarthmore college 2009/dl/e5_lecture… · microsoft powerpoint - e5_lecture_7.pptx...
TRANSCRIPT

Lecture 7: Even More MatLab, &Forward and Inverse Kinematics
Professor Erik Cheever
C b Course web page: http://www.swarthmore.edu/NatSci/echeeve1/Class/e5/E5Index.html
R bRemember…Thursday 10/22: 2nd MatLab lab is due (Solving the T puzzle)puzzle).
Thursday 10/29: 3rd MatLab lab is due (Animating the T y / ( gpuzzle – this week’s lab)
Tuesday & Wednesday 10/20 & 10/21: Wizards Tuesday & Wednesday, 10/20 & 10/21: Wizards available (Trotter 201) from 8:00-10:00 p.m. specifically for E5. Don’t wait until the last minute!
Start thinking about your project (last 3 weeks of class). Some ideas are at “Projects” link on left side of course jweb page page (including last year’s projects).
A l t t itA volunteer opportunityProfessor Macken works with kids from Chester on E i i j t (b id i th f ll l i Engineering projects (bridges in the fall, solar cars in the spring).
You must have Wednesday afternoons after 3:45 free.
It begins this Wednesday and goes 4 weeks.
C t t P f M k k 1 8073Contact Professor Macken, nmacken1, x8073

A l t t itA volunteer opportunity

Th bi i tThe big picture…Today:
Control of flow in MatLabForward kinematics for Robot armI ki ti f R b t Inverse kinematics for Robot armProfessor Lynne Molter, Electrical Engineering
Read sections 4 3 4-5 and 5 2 1-3 of textRead sections 4.3.4 5 and 5.2.1 3 of textFollowing three weeks: controlling motors, and designing, build, and program both a robotic arm with laser pointer.
Last three weeks of class individual projects Last three weeks of class – individual projects. Some ideas on “Projects” link on left side of course web page (including last year’s projects).

Control of flow in MatLabSo far we have used MatLab as a fancy calculatorThe real power comes when we can have MatLab:
f lPerform operations many times consecutively:for… loop
Make decisions:Make decisions:if…then…else…if…then…elseif…then…elseif… … …else…while… loop
The for… loop (1)Output:
12
Syntax:for variable=start:finish,
234
…commands…end
Example:f i 1 10
567for i=1:10,
disp(i)d
789end 9
10
The for… loop (2)Syntax:for variable=start:increment:finish,
d…commands…end
Example:for i=1:4:10
Output:1for i=1:4:10,
disp(i)end
159

F l l (0)For loop example (0)First define a shape:p%% Define a shapetheta=0:10:360; %theta is spaced around a circle (0 to 360).r=1; %The radius of our circle.%Define a circular magenta patch.x=r*cosd(theta);x=r*cosd(theta);y=r*sind(theta);myShape=patch(x,y,'m');axis(20*[-1 1 -1 1],'square'); grid on;

F l l (1)For loop example (1)Make the shape move:p%% Move it across the screen
T=0.25; %Delay between imagesfor x0=-15:2.5:15,
set(myShape 'Xdata' x0+x); %Translate by x0set(myShape, Xdata ,x0+x); %Translate by x0pause(T); %Wait T seconds
end
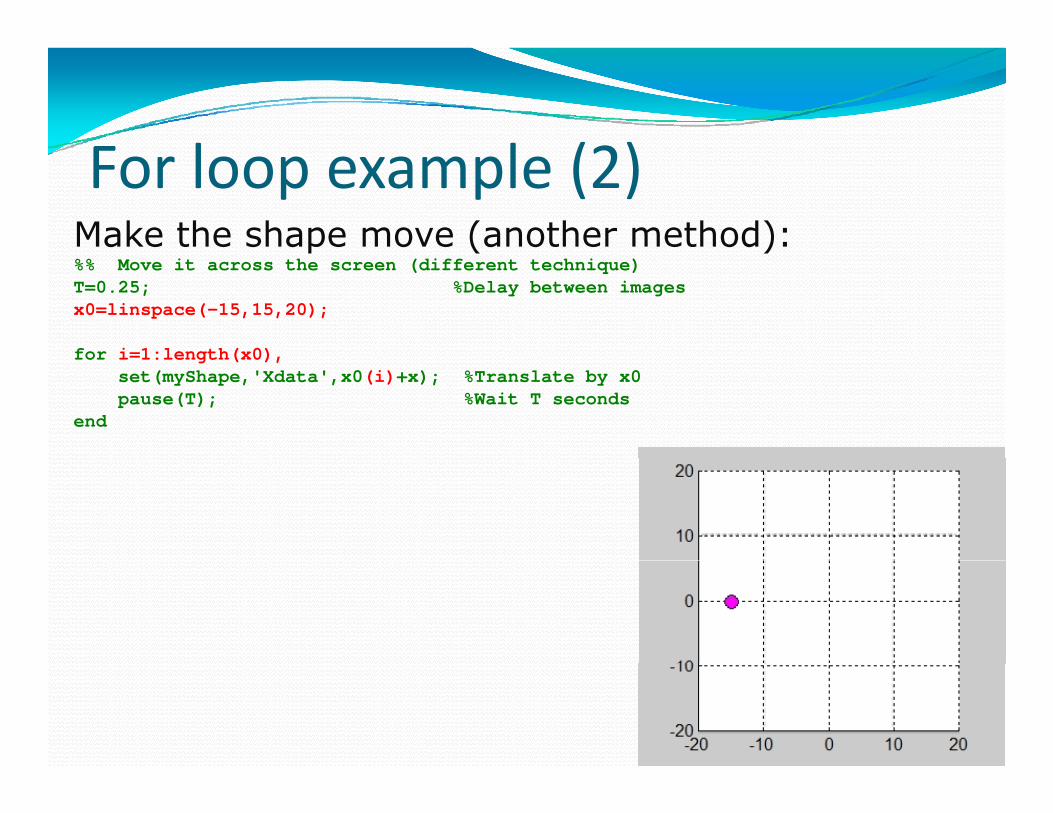
F l l (2)For loop example (2)Make the shape move (another method):p ( )%% Move it across the screen (different technique)T=0.25; %Delay between imagesx0=linspace(-15,15,20);
for i=1:length(x0)for i=1:length(x0),set(myShape,'Xdata',x0(i)+x); %Translate by x0pause(T); %Wait T seconds
end

F l l (2)For loop example (2)Make the shape move (another method):p ( )%% Move it across the screen (different technique)T=0.25; %Delay between imagesx0=linspace(-15,15,20);
for i=1:length(x0)for i=1:length(x0),set(myShape,'Xdata',x0(i)+x); %Translate by x0pause(T); %Wait T seconds
end
Note: This week in lab Note: This week in lab you will use the “RotTrans” function (from last lab) to animate the last lab) to animate the parts of the T puzzle as they move into place.

F l l (3)For loop example (3)Make the shape move by giving it velocity:p y g g y%% Move it by giving it a velocity in xvx=5; %velocity in meters/sec.dt=0.25; %time step
x0=-10;x0= 10;for t=0:dt:4,
set(myShape,'Xdata',x+x0); %Translate by x0pause(dt); %Wait dt secondsx0=x0+vx*dt; %update x position
end

F l l (4)For loop example (4)Give it velocity in two directions:%% M it b i i it l it i d%% Move it by giving it a velocity in x and yvx=5; %velocity in meters/sec.vy=10;dt=0.25; %time step
x0=-10;y0=-10;for t=0:dt:3,
set(myShape,'Xdata',x+x0,'Ydata',y+y0); %Translate by x0.y0pause(dt); %Wait dt secondspause(dt); %Wait dt secondsx0=x0+vx*dt; %update x positiony0=y0+vy*dt; %update y position
end

F l l (5)For loop example (5)Add gravity:%% Add it%% Add gravityvx=5; %velocity in meters/sec.vy=15;dt=0.2; %time step
x0=-15;y0=0;for t=0:dt:4,
set(myShape,'Xdata',x+x0,'Ydata',y+y0); %Translate by x0, y0pause(dt); %Wait dt secondspause(dt); %Wait dt secondsx0=x0+vx*dt; %update x postiony0=y0+vy*dt; %update y position
vy=vy-9.8*dt; %update y velocityend

M ki D i i i M tl b ifMaking Decisions in Matlab: ifSyntax:if expressionif expression,
… statements … end
E le
expression has to evaluate to TRUE or FALSE
Example:if a>b,
disp('a is greater than b');end
if (a>b) & (a>0),di (' b d i iti ')disp('a>b and a is positive');
end

L i l iLogical expressionsexpression has to evaluate to TRUE or FALSE
a>b TRUE when a is greater than b, otherwise FALSE
a<b TRUE when a is less than b, otherwise FALSEa<b TRUE when a is less than b, otherwise FALSE
a>=b TRUE when a is greater than or equal to b, otherwise FALSE
a==b TRUE when a is equal to b, otherwise FALSE
a~=b TRUE when a is not equal to b, otherwise FALSE
(a>0) & (b>0) TRUE when a is greater than 0 and b is greater than zero, otherwise FALSE
( >0) | (b>0) TRUE h i t th 0 b i t th th i FALSE(a>0) | (b>0) TRUE when a is greater than 0 or b is greater than zero, otherwise FALSE
(a>0) | ~(b>0)TRUE when a is greater than 0 or b is not greater than zero, otherwise FALSE
f l f b lBe careful if a or b are matrices, surprising results can occur!
Note: this list is not exhaustive, check you text for more.

M ki D i i if lMaking Decisions: if … elseSyntax:if expressionif expression,
… statements … else
… statementsend
E leExample:if a>b,
disp('a is greater than b');else
disp('a is less than or equal to b');end

kMaking Decisions: if … elseif … elseSyntax:if expression1if expression1,
… statements … elseif expression2,
… statements …else
… statements …end
Example:if a>b,
di (' i t th b')disp('a is greater than b');elseif a<b,
disp('a is less than b');else
disp('a is equal to b');end

l (1)Example: if…elseif…else (1)plot([-15 -15 15 15 -15],[15 -15 -15 15 15],'b','LineWidth',2);for t=0:dt:10,
( h d 0 d 0) % l b 0 0set(myShape,'Xdata',x+x0,'Ydata',y+y0); %Translate by x0, y0pause(dt); %Wait dt secondsx0=x0+vx*dt; %update x postiony0=y0+vy*dt; %update y postion
9 8*dt % d t l itvy=vy-9.8*dt; %update y velocityif x0>=15-r, %check for collision with right side
vx=-vx; %if so, reverse x velocityx0=15-r; %reset x position so it touches wall
l if 0 15 % h k f lli i ith l ft idelseif x0<=-15+r, %check for collision with left side...vx=-vx;x0=-15+r;
endif 0> 15 % h k f tif y0>=15-r, %check for top
vy=-vy;y0=15-r;
elseif y0<=-15+r, %check for bottomvy=-vy;y0=-15+r;
endend
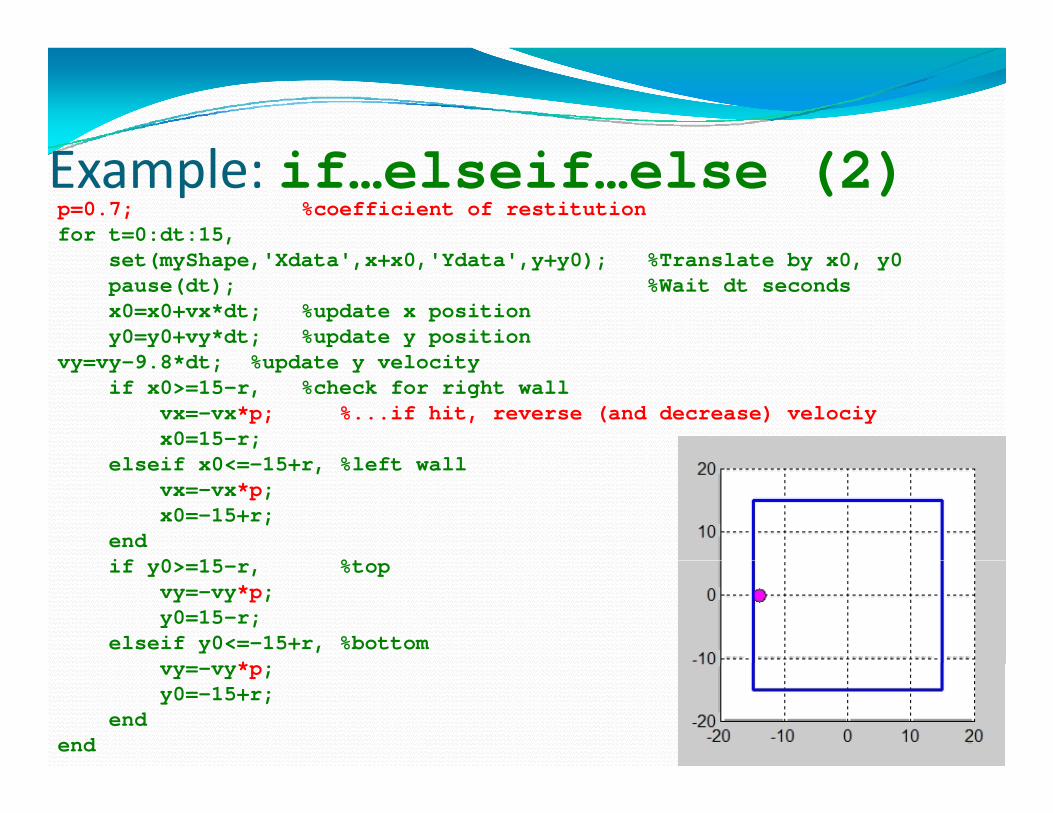
l (2)Example: if…elseif…else (2)p=0.7; %coefficient of restitutionfor t=0:dt:15,
( h d 0 d 0) % l b 0 0set(myShape,'Xdata',x+x0,'Ydata',y+y0); %Translate by x0, y0pause(dt); %Wait dt secondsx0=x0+vx*dt; %update x positiony0=y0+vy*dt; %update y position
9 8*dt % d t l itvy=vy-9.8*dt; %update y velocityif x0>=15-r, %check for right wall
vx=-vx*p; %...if hit, reverse (and decrease) velociyx0=15-r;
l if 0 15 %l ft llelseif x0<=-15+r, %left wallvx=-vx*p;x0=-15+r;
endif 0> 15 %tif y0>=15-r, %top
vy=-vy*p;y0=15-r;
elseif y0<=-15+r, %bottom*vy=-vy*p;
y0=-15+r;end
end

M ki D i i hilMaking Decisions: while…Syntax:while expressionwhile expression,
… statements … end
E lExample:i=1;while i<10,
disp(i);disp(i);i=i+4;
end
Output:159 Note: this is equivalent to the for…loop used earlier

lExample: while…while (abs(vx)>2) | (abs(vy)>2) | (y0<-15+2*r),
set(myShape,'Xdata',x+x0,'Ydata',y+y0); %Translate by x0, y0(d ) % i d dpause(dt); %Wait dt seconds
x0=x0+vx*dt; %update x positionvy=vy-9.8*dt; %update y velocityif x0>=15-r, %check for right wall
* %if hit ( d d ) l ivx=-vx*p; %if hit, reverse (and decrease) velociyx0=15-r;
elseif x0<=-15+r, %left wallvx=-vx*p;0 15x0=-15+r;
endif y0>=15-r, %top
vy=-vy*p;0 15y0=15-r;
elseif y0<=-15+r, %bottomvy=-vy*p;y0=-15+r;
dendend

Th l i jThe laser pointer projectl b h l hGiven a simple robotic arm with a laser, how
can you get it to point to a specified location on the wallon the wall.
To start, we must understand the geometry of the problem.
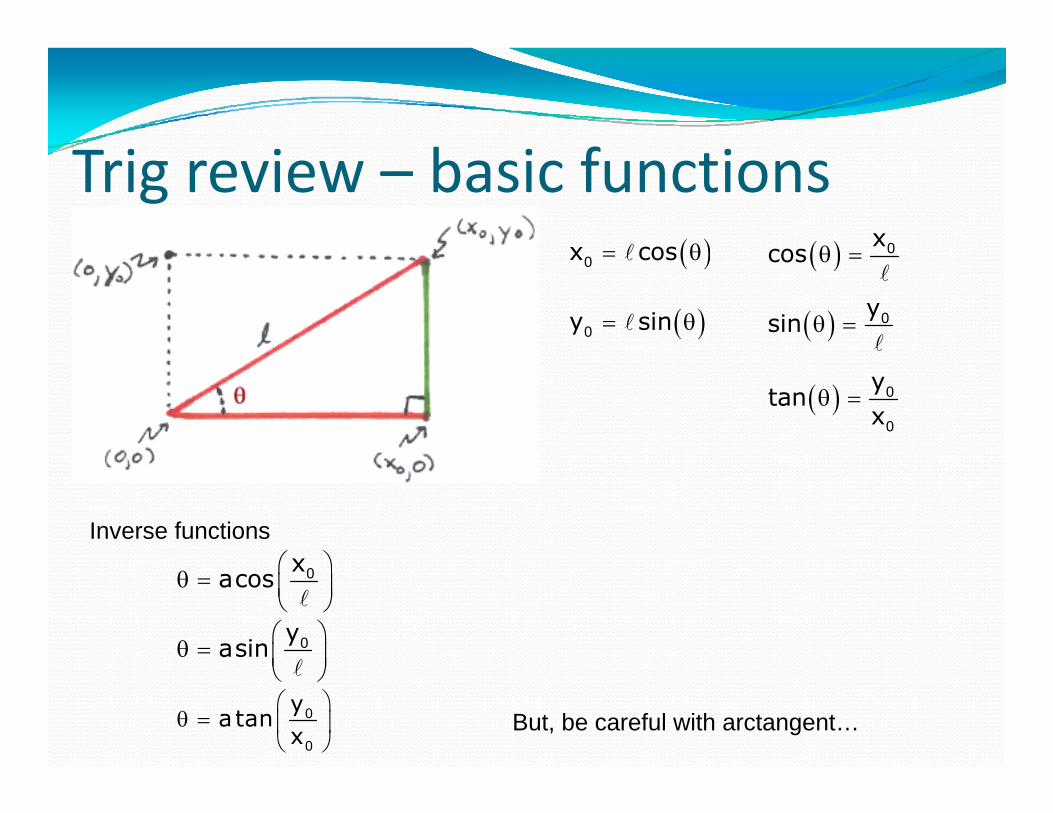
T i i b i f iTrig review – basic functions( )= θx cos ( )θ 0xcos( )= θ0x cos
( )= θ0y sin
( )θ = 0cos
( )θ = 0ysin
( )θ = 0
0
ytanx
Inverse functions⎛ ⎞x⎛ ⎞
θ = ⎜ ⎟⎝ ⎠
0xacos
⎛ ⎞θ = ⎜ ⎟
⎝ ⎠0yasin⎜ ⎟
⎝ ⎠⎛ ⎞
θ = ⎜ ⎟⎝ ⎠
0
0
yatanx But, be careful with arctangent…

Trig review – arctangentsConsider a point in the first quadrant, (x0,y0).
>> atan(6/3) * 180/pi ans = 63.4349
>> atan2(6,3)*180/pians = 63.4349
Now consider a point in the third quadrant, (x0,y0).
>> atan(-6/-3) * 180/pians = 63.4349
>> atan2(-6,-3) * 180/pians = -116.5651

T i i P hTrig review – Pythagoras2 2 20 0x y , Pythagoras' therom+ =
( )x cos θ= ( )0y sin θ=( )0x cos θ= ( )0y sin θ
( ) ( )2 2 2 2 2cos θ sin θ+ =
( ) ( )2 2cos θ sin θ 1+ =
www.gbbservices.com/images/cos2sin201.jpg
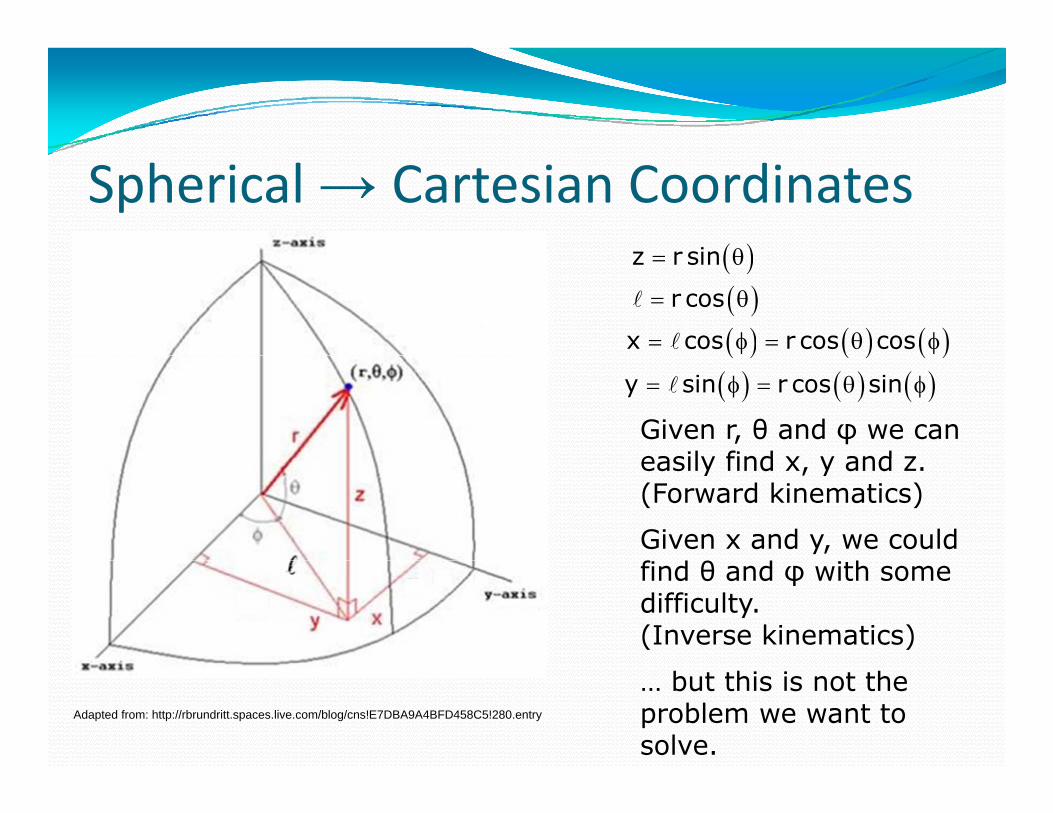
Spherical → Cartesian Coordinates( )θz r sin( )= θz r sin
( )= θr cos
( ) ( ) ( )= φ = θ φx cos r cos cos( ) ( ) ( )( ) ( ) ( )= φ = θ φy sin r cos sin
Given r, θ and φ we can easily find x y and z
Given x and y, we could f d θ d h
easily find x, y and z.(Forward kinematics)
find θ and φ with some difficulty.(Inverse kinematics)
Adapted from: http://rbrundritt.spaces.live.com/blog/cns!E7DBA9A4BFD458C5!280.entry
… but this is not the problem we want to solve.

2‐D Polar → Cartesian w/ offset( )= ρ φ0x sin
( )= ρ φ0y cos
Angle of “r” from horizontal is equal to φ.
( ) ( ) ( )0x x r cos sin r cos= + φ = ρ φ + φ
( ) ( ) ( )= + φ = ρ φ + φ0y y r sin cos r sin
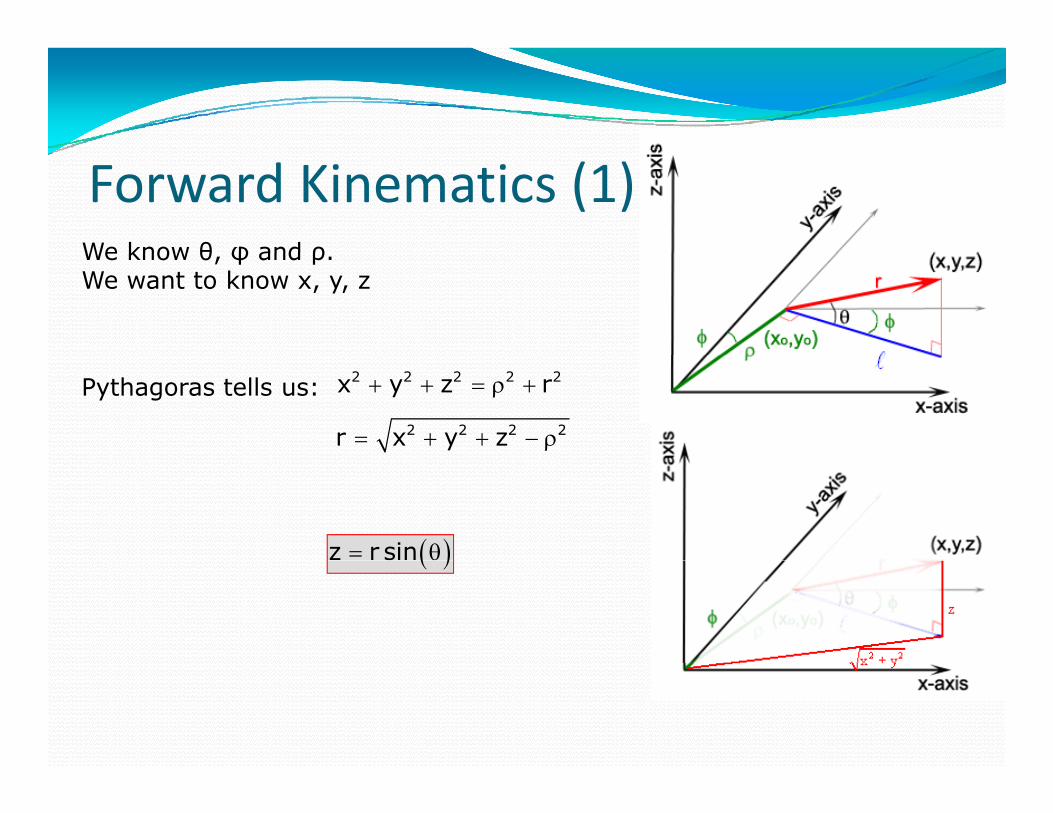
Forward Kinematics (1)We know θ φ and ρWe know θ, φ and ρ.We want to know x, y, z
Pythagoras tells us: 2 2 2 2 2x y z r+ + = ρ +
= + + − ρ2 2 2 2r x y z
( )z r sin= θ( )

( )0x sin= ρ φ
Forward Kinematics (2)( )0 ρ φ
( )0y cos= ρ φ
( )0x x cos= + θ
We know θ, φ and ρ.We want to know x, y, z
( )0x x cos+ θ
( ) ( )x sin cos= ρ φ + φ
( ) ( ) ( )x sin r cos cos= ρ φ + θ φ( ) ( ) ( )x sin r cos cos= ρ φ + θ φ
( )0y y sin= − θ
N t i i thi i f
( ) ( )y cos sin= ρ φ − φ
( ) ( ) ( )
Note sign in this expression for y
( ) ( ) ( )y cos r cos sin= ρ φ − θ φ

Inverse Kinematics (1)So… using forward kinematics we can determine x, y and z, given the
( ) ( ) ( )y cos r cos sin= ρ φ − θ φ( ) ( ) ( )x sin r cos cos= ρ φ + θ φ
g , y , gangles φ and θ.
But… forward kinematics is not enough. Generally with a robot, we know where we want the robot to be (x,y), and need to find the angles.
This process is called inverse kinematics.
Problem statement: we know x, y, and z (these are inputs) and we know ρ (determined by geometry of robot).
We want to find φ and θWe want to find φ and θ.

Inverse Kinematics (2)We know x, y, z and ρ.
Solving for θ. (this is relatively easy)
We know: ( )z r sin= θ
zarcsin⎛ ⎞θ = ⎜ ⎟So: arcsinr
θ = ⎜ ⎟⎝ ⎠
…and we have solved for one of our two angles.
So:

Inverse Kinematics (3)We know x, y, z and ρ.
( ) ( )= ρ φ + φx sin cosStart with:
Solving for φ. (this is harder)
( ) ( )= ρ φ − φy cos sin
Multiply x by sin(φ) and y by cos(φ) and add (to get rid of ℓ):
( ) ( ) ( ) ( )φ = ρ φ + φ φ2x sin sin cos sin
( ) ( ) ( ) ( )φ = ρ φ − φ φ2y cos cos sin cos
( ) ( ) ( ) ( ) ( )φ + φ = ρ φ + φ φ2x sin ycos sin cos sin ( ) ( ) ( )+ ρ φ − φ φ2cos sin cos
( ) ( ) ( ) ( )( )φ + φ = ρ φ + φ2 2x sin ycos sin cos
We’re almost done…
( ) ( )φ + φ = ρxsin ycos

Inverse Kinematics (4)
( ) ( )φ + φ = ρxsin ycos
… continued from previous
Use trigonometric identity:
( ) ( ) ( )( )α + α = + α +2 2asin bcos a b sin atan2 b,a
= = α = φa x b y
( ) ( ) ( )( )φ + φ = + φ + = ρ2 2x sin ycos x y sin atan2 y,x
( )( ) ρφ + =
+2 2sin atan2 y,x
x y
( )⎛ ⎞ρ
φ ⎜ ⎟t 2 i ⎛ ⎞ρ( ) ρφ + = ⎜ ⎟
⎜ ⎟+⎝ ⎠2 2
atan2 y,x asinx y
so… ( )⎛ ⎞ρ
φ = −⎜ ⎟⎜ ⎟+⎝ ⎠
2 2asin atan2 y,x
x y

What if we add a third joint?
Are there any difficulties to the forward kinematics problem?
Inverse kinematics is generally harder than forward kinematics.
Are there any difficulties to the reverse kinematics problem?
g y