earthquake distribution is not random: very narrow...
TRANSCRIPT

Earthquake distribution is not random: very narrow deforming zones(= plate boundaries) versus large areas with no earthquakes (= rigid
plate interiors)

Tectonic plates and their boundaries today -- continentsare embedded in the plates and move with them
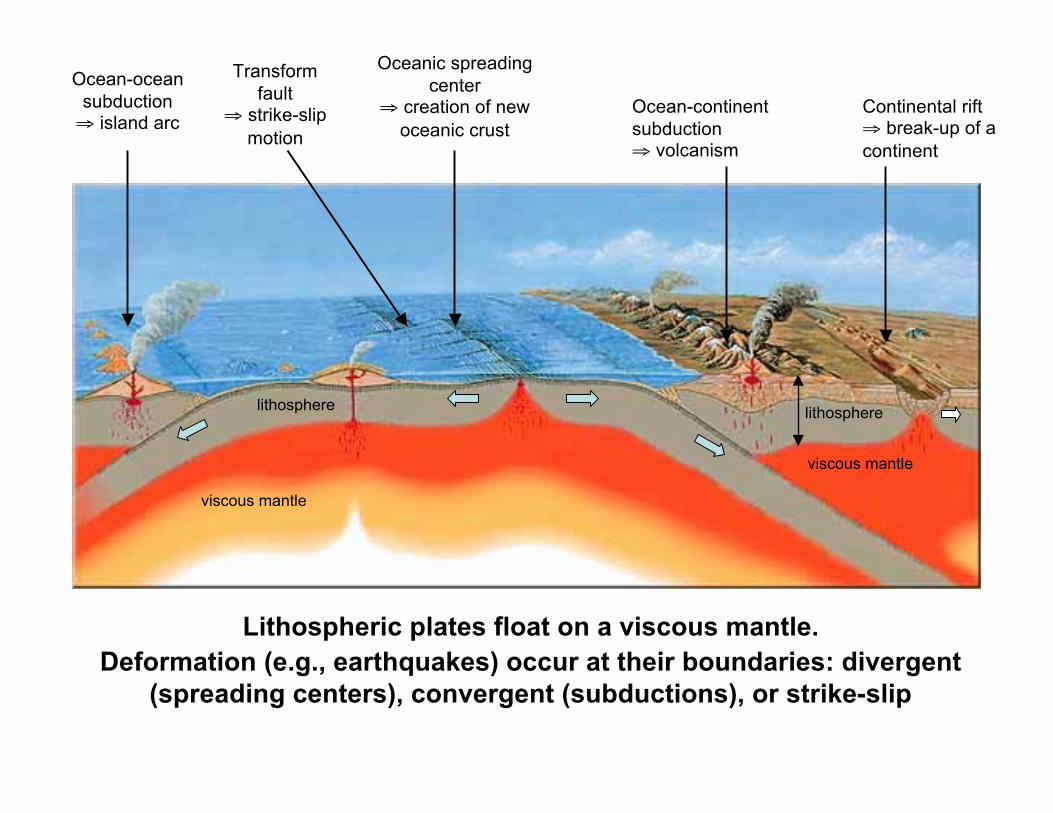
Ocean-oceansubduction⇒ island arc
Oceanic spreadingcenter
⇒ creation of newoceanic crust
Ocean-continentsubduction⇒ volcanism
Continental rift⇒ break-up of acontinent
Lithospheric plates float on a viscous mantle.Deformation (e.g., earthquakes) occur at their boundaries: divergent
(spreading centers), convergent (subductions), or strike-slip
Transformfault
⇒ strike-slipmotion
lithosphere
viscous mantle
viscous mantle
lithosphere
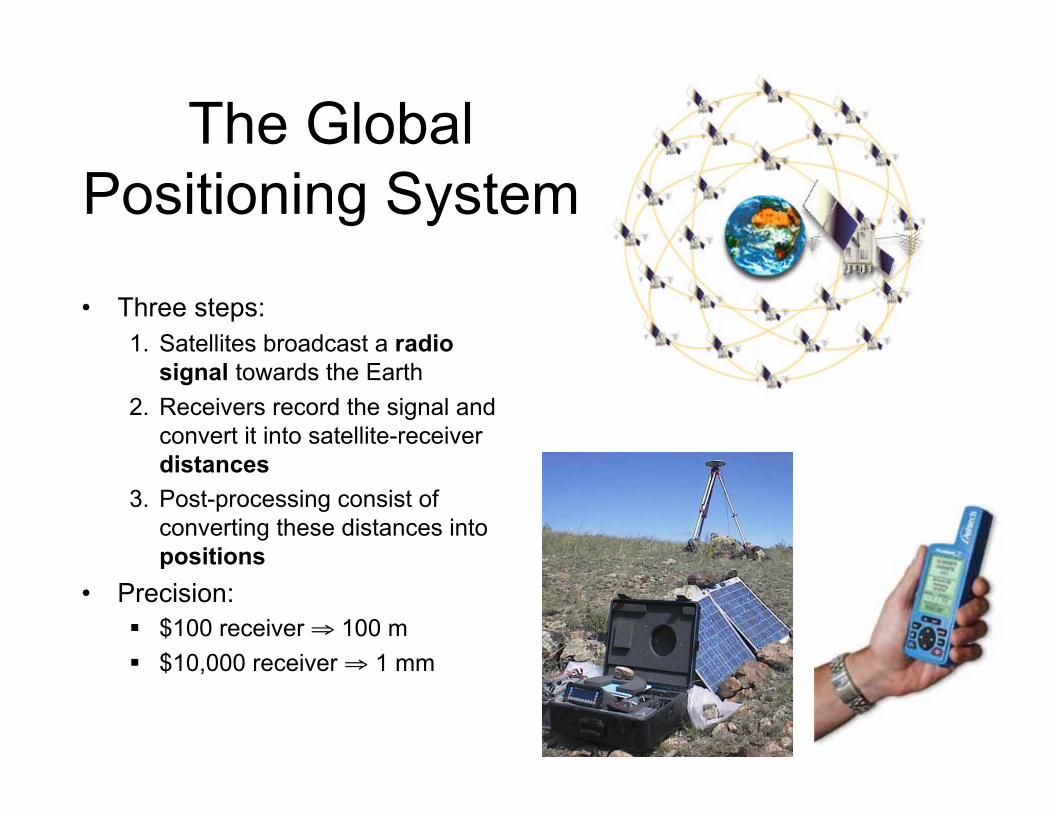
The GlobalPositioning System
• Three steps:1. Satellites broadcast a radio
signal towards the Earth2. Receivers record the signal and
convert it into satellite-receiverdistances
3. Post-processing consist ofconverting these distances intopositions
• Precision: $100 receiver ⇒ 100 m $10,000 receiver ⇒ 1 mm

Principle of GPS positioning
satellite 1
Earth
ρ1
satellite 3
ρ3
ρ2
You are here
x
ρ2
satellite 2
• Satellites broadcast signals on 1.2 GHzand 1.5 GHz frequencies:
– Satellite 1 sends a signal at time te1– Ground receiver receives it signal at time tr– The range measurement ρ1 to satellite 1 is:
ρ1 = (tr-te1) x speed of light– We are therefore located on a sphere
centered on satellite 1, with radius ρ1– 3 satellites => intersection of 3 spheres
• Or use the mathematical model:
• A! The receiver clocks are mediocre andnot synchronized with the satellite clocks
– Time difference between the satellite clocksand the receiver clock
– Additional unknown => we need 4observations = 4 satellites visible at thesame time
222 )()()(rsrsrs
s
rZZYYXX !+!+!="

Principle of GPS positioning• GPS data = satellite-receiver
range measurements (ρ)• Range can be measured in two
ways:1. Measuring the propagation time of
the GPS signal:• Easy, cheap• Limited post-processing required• As precise as the time
measurements ~1-10 m2. Counting the number of cycles of
the carrier frequency• More difficult• Requires significant post-processing• As precise as the phase detection ~1
mmEarth
x
te
tr
data = (tr-te) x c data = λ x n
λ ~ 20 cm
From codes: From carrier:
(unit = meters) (unit = cycles)
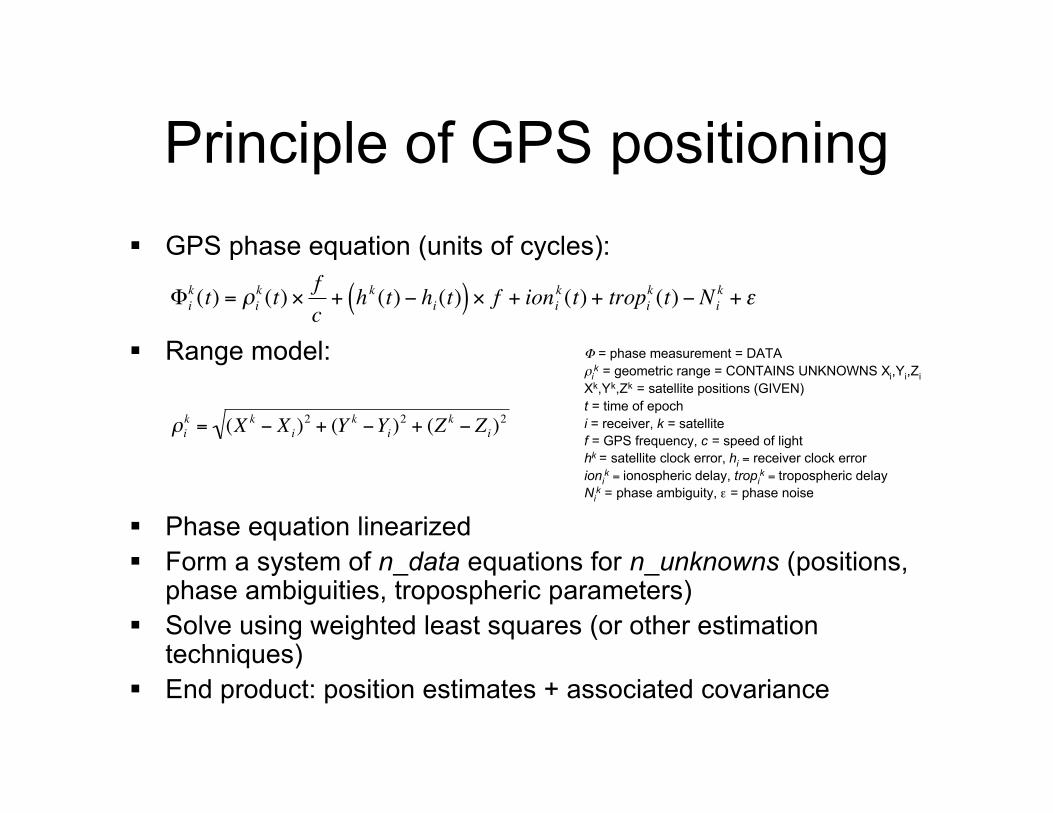
Principle of GPS positioning GPS phase equation (units of cycles):
Range model:
Phase equation linearized Form a system of n_data equations for n_unknowns (positions,
phase ambiguities, tropospheric parameters) Solve using weighted least squares (or other estimation
techniques) End product: position estimates + associated covariance
!
"i
k(t) = #i
k(t) $
f
c+ h
k(t) % hi(t)( ) $ f + ioni
k(t) + tropi
k(t) % Ni
k + &
!
"i
k= (X
k # Xi)2
+ (Yk #Y
i)2
+ (Zk # Z
i)2
Φ = phase measurement = DATAρi
k = geometric range = CONTAINS UNKNOWNS Xi,Yi,ZiXk,Yk,Zk = satellite positions (GIVEN)t = time of epochi = receiver, k = satellitef = GPS frequency, c = speed of lighthk = satellite clock error, hi = receiver clock errorioni
k = ionospheric delay, tropik = tropospheric delay
Nik = phase ambiguity, ε = phase noise

Principle of GPS positioning
⇒ Precise GPS positioning requires:• Dual-frequency equipment• Rigorous field procedures• Long (several days) observation sessions• Complex data post-processing
MagnitudeTreatmentError source
~ 1 cmUse correction tablesAntenna phase center
~ 0.5 mChoose good sites!Multipath
???Choose good operators!Site setup
centimetersPrecession, Nutation, UT, Polar motionGeodetic models
centimetersTides (polar and solid Earth), Ocean loadingGeophysical models
2 cm to 100 mGet precise (2-3 cm) orbitsSatellite orbits
1-50 mDual frequency measurementsIonospheric refraction
0.5-2 mExternal measurement or estimation of “troposphericparameters”
Tropospheric refraction
metersDouble difference or direct estimationReceiver clock errors
~1 mDouble difference or direct estimationSatellite clocks errors
< 1 mmNonePhase measurement noise
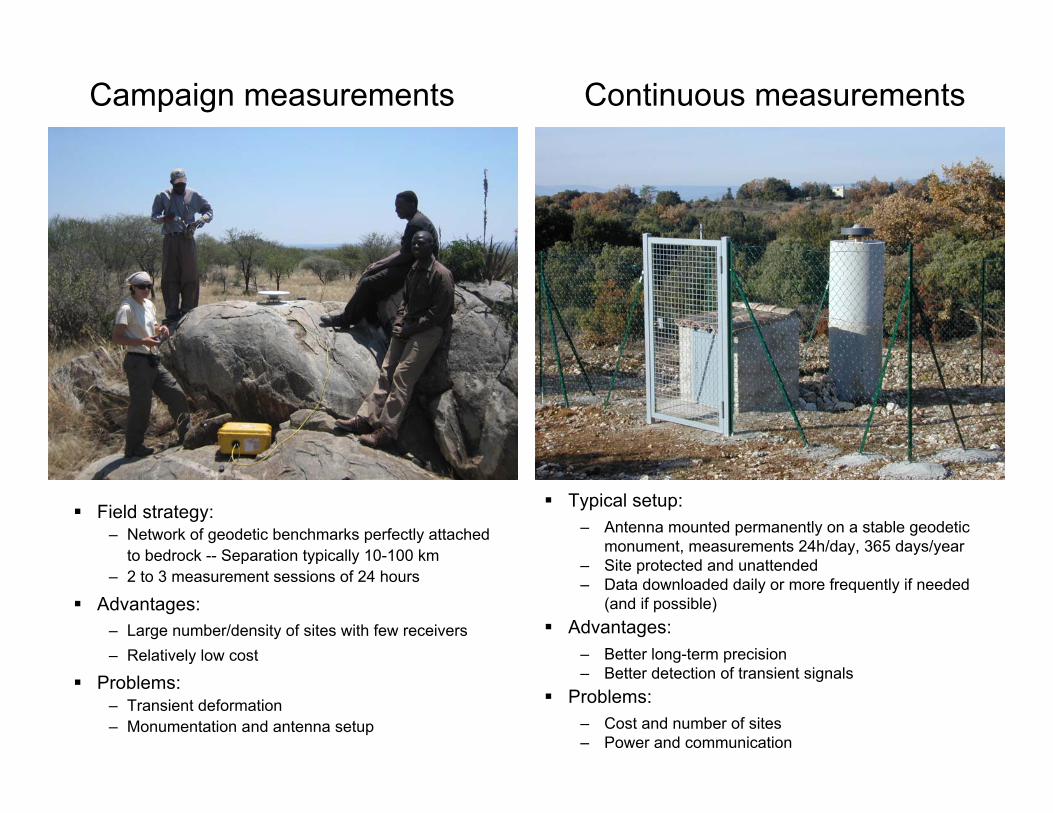
Campaign measurements Continuous measurements
Field strategy:– Network of geodetic benchmarks perfectly attached
to bedrock -- Separation typically 10-100 km– 2 to 3 measurement sessions of 24 hours
Advantages:– Large number/density of sites with few receivers– Relatively low cost
Problems:– Transient deformation– Monumentation and antenna setup
Typical setup:– Antenna mounted permanently on a stable geodetic
monument, measurements 24h/day, 365 days/year– Site protected and unattended– Data downloaded daily or more frequently if needed
(and if possible) Advantages:
– Better long-term precision– Better detection of transient signals
Problems:– Cost and number of sites– Power and communication

Continents show consistentpattern of displacement
They move at speeds ~fewcm/yr = the speed your
fingernails grow…
Repeated GPS measurements show that the longitude of Algonquin(Canada) is changing at a rate of 1.5 cm/yr


• Norabuena et al.(1999): decelerationback to at least 20My, initiation ofAndes growth
• Consequence ofconstruction of theAndes?
• Increased friction andviscous drag asleading edge of Sathickens?

Norabuena et al., Science, 1998

Hutton et al., GJI, 2001
Jalisco earthquake, October1995, Mw=8.0

Episodic Tremors and SlipDragert et al., Science 2001
http://www.pgc.nrcan.gc.ca/seismo/ETS/ETS.htm
• Juan de Fuca subduction• Typical interseismic strain accumulation• Episodes of aseismic slip every 13 to 16 months• Typically 10 day long, 5 mm surface displacement
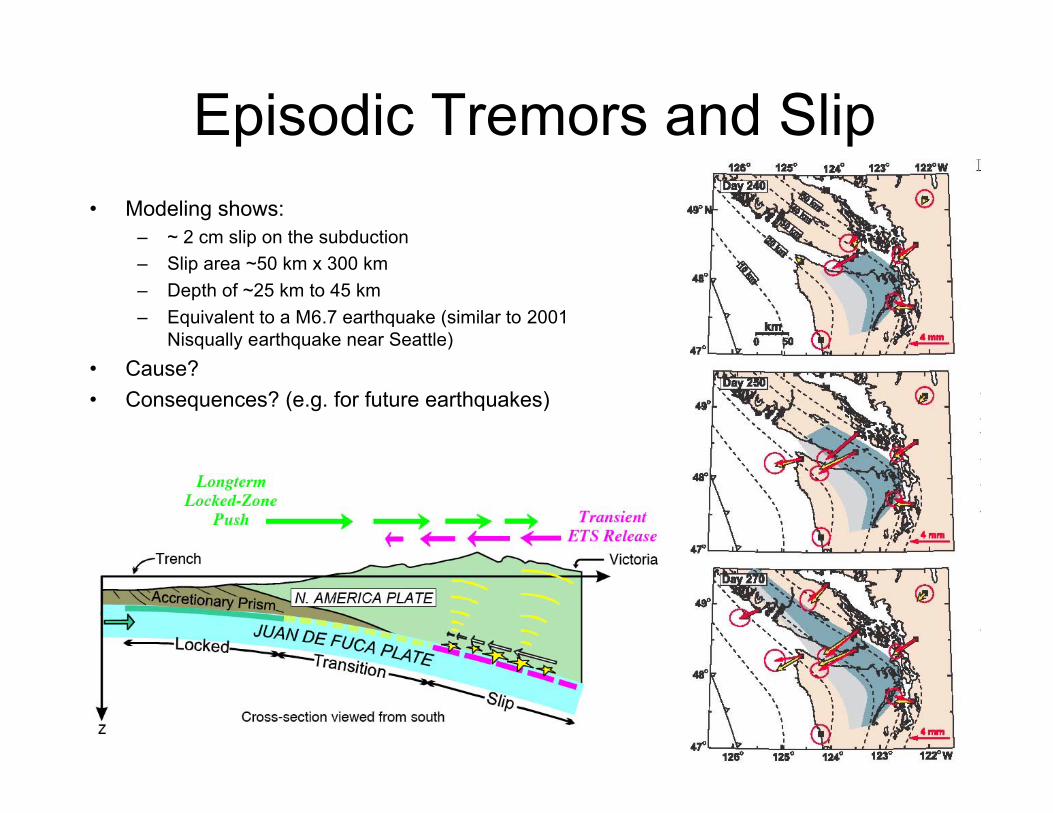
Episodic Tremors and Slip• Modeling shows:
– ~ 2 cm slip on the subduction– Slip area ~50 km x 300 km– Depth of ~25 km to 45 km– Equivalent to a M6.7 earthquake (similar to 2001
Nisqually earthquake near Seattle)• Cause?• Consequences? (e.g. for future earthquakes)

Vertical motions:post-glacial rebound, up to cm/yr
Sella et al., 2007

Time dependent vertical motions:hydrological loading
VanDam et al., 2001
Bevis et al., 2005
Comparison between GPS observations at Manaus(Amazonian basin, red dots) and the predicted flexure
of an elastic plate under water loading. A model of the peak-to-peak amplitude of vertical motionsdue to hydrological loading (=water + snow)