複雑構造材料の特性解析グループマイクロナノバイオマテリアルの機械的特性評価手法の...
TRANSCRIPT

複雑構造材料の特性解析グループ

京都大学‐ミシガン大学‐フライブルク大学 MicRO アライアンス
工学研究科機械工学専攻 田畑 修
Abstract: The objective of this alliance between three Universities, Kyoto University, The University of Michigan and Freiburg University, is the establishment of new design and fabrication paradigms for micro electro mechanical systems (MEMS) of next-generation in which nanostructures are integrated with micro MEMS. During the project, the key technologies to realize next-generation MEMS will be established. Furthermore, a strong international alliance in MEMS field will be formulated to further pursue the clarification and strengthening of the core-competence technology of the alliance institutes, to share systems of research infrastructure, as well as to develop the educational program, the continuing education program and the international internship program. Key words: MEMS, Michigan, Freiburg, alliance, education
1. はじめに
2004年11月,京都大学,ミシガン大学,フライブルク大学の3大学は次世代微小電気機械融合システム
(MEMS: Micro Electro Mechanical Systems)分野の基盤技術の系統的構築を目指して,3大学の学術交
流協定を締結した.今後この学術交換協定に基づき,21世紀COE「動的機能機械システムの数理モデル
と設計論」による支援を受けて,共同研究を進めていく予定である.この学術交流協定は,それぞれの
大学の名称からMicRO(Micigan, fReibuRg, kyOtO)アライアンスと名付けられた.本稿では,MicROア
ライアンスのパートナー大学であるミシガン大学とフライブルグ大学の紹介と,MicROアライアンスの目
標について紹介する.
2. パートナー大学
ミシガン大学は1817年に設立された世界でもトップクラスの大学の1つであり,全米50州からの学
生および留学生を含む54,000人の学生が学んでいる.アナーバー,フリント,ディアボーンの3市にキ
ャンパスを持ち,常に全米トップ25に入っている公立大学3校のうちの1校である.ミシガン大学には
19 のカレッジとスクールがあり,教員約7,600 人,その他の職員約27,500 人が教育・研究に従事して
いる.工学部門は教育と研究に関して,常に世界でも最高レベルにランクされている.工学部門の教員
より構成・運営される集積化ワイヤレスマイクロシステム研究センター(WIMS:Wireless Integrated
Micro Systems)はマイクロシステム,MEMS に関する研究で北米および世界における当該分野の研究拠
点として高い評価を受けている.
フライブルク大学は,ドイツ南西部,フランス,スイスとの国境近くに位置する人口20万人の都市フ
ライブルクにある公立大学である.1457年に神学,法学,医学,哲学の4学部で創設されたドイツでも
古い大学であるが,長い間人文科学系および医学系を中心とした大学であった.しかし,ドイツにおけ
る技術者不足の解消,また新たな産業の創出を目的として,工学部Faculty of Applied Scienceが1995
年に設立され,同年,マイクロシステム工学科が誕生した.今日では,全学で 11 学部,学生数 19,000
人以上,教職員9000人を擁し,欧州屈指の有力総合大学として知られている.マイクロシステム工学科
は18講座,200人の研究スタッフを擁し,マイクロシステム,MEMSに関する基礎物理・化学分野から,
電気・機械・情報などの広範な工学分野において横断的な分野の教育と研究を行っており,欧州および
世界における当該分野の研究拠点として高い評価を受けている.
3. MicROアライアンスの目標
京都大学は基礎科学・工学を重視した研究展開を行っている点が特徴である.平成17年4月には機械系
の改組によりマイクロエンジニアリング専攻が設置され,バイオ・次世代MEMS分野などの複合,境界領
域をサイエンス(基礎)からエンジニアリング(応用)までの幅広い視点で研究する体制が整った.ま
第4章 研究成果報告

た,平成15年から工学研究科の移転が開始された桂キャンパスには,共同実験棟として半導体微細加工
設備を有するインテックセンターが設置され,専攻の枠を超えてナノテクノロジーや次世代MEMSに関す
る基盤技術の研究開発を行う組織としてナノ工学高等研究院を設立された.ミシガン大学は集積化ワイ
ヤレスマイクロシステム研究センターにおける次世代LSIを集積化した次世代MEMSの研究開発が特徴的
であり,MEMSの生体・医療分野への応用研究も積極的に進めている.フライブルク大学は,次世代MEMS
に関わる電気・電子・化学・バイオ・微細加工・光・材料・パッケージ・シミュレーション・産業応用
などの幅広い領域の研究を18講座で系統的に網羅している点が特徴である.MicROアライアンスはこの3
大学の特徴を有機的に結びつけることで,次世代MEMS分野の基盤技術を系統的かつ網羅的に構築するた
めのフレームワークを形成することを目標としている.
若手研究者の養成も目標達成の重要な要素である.助教授,助手クラスの若手教員,ドクター・マス
ター学生の相互交流を積極的に進める.また次世代MEMS分野の持続的な研究・教育交流のために,若手
の相互交流によって各大学が保有する超微細加工,極微量・極超感度分析関連の研究インフラを若手研
究者に熟知させ,研究インフラの相互利用システム環境を構築する.
次世代MEMS分野のように急速に発展し,かつマルチディシプリナリーで最先端の知識を必要とする研
究分野の研究促進に重要なもう一つの要素は,企業における若手研究者・技術者の再教育(リカレント
教育)である.京都大学,ミシガン大学,フライブルク大学の3拠点大学は,それぞれが活発に産学連携
に取り組んでおり,これらの共同研究を進めている企業の若手研究者・技術者を社会人大学院学生とし
て受け入れ,次世代MEMS分野のリカレント教育を行うシステムを構築する.また京都大学,ミシガン大
学,フライブルク大学に在学中のドクター・マスター学生には,グローバルな視点で産業応用を常に意
識した次世代MEMS分野研究を行う能力を養うため,連携大学を通じての他地域でインターンシップを実
施するプログラムをスタートさせたいと考えている.
学術情報発信や研究成果還元も重要な目標である.京都大学,ミシガン大学,フライブルク大学が幹事校と
なり,アジア・北米・欧州において持ち回りで毎年ミーティングとシンポジウムを開催し,学術情報の国際的収集,
研究成果の学術的な還元および社会的な還元を積極的に実施する.学術交流協定初年の 2004 年度は京都
大学が幹事校となり, 10 月 12,13 日,京都大学にて第 1 回ミーティングとシンポジウムを開催した.2005 年度
は 10 月14,15 日にミシガン大学にて第2 回ミーティングとシンポジウムを開催する. さらには 3 大学がそれぞ
れの地域における関連研究機関の中核として学術情報の収集・分析を行った結果を,前述のシンポジウムな
どによって情報発信し,本事業での研究活動成果の公表に努める予定である.
フライブルク大学
京都大学
ミシガン大学
産学連携企業群
産学連携企業群
産学連携企業群
人材交流教育コンテンツ共有研究インフラ共有学術情報共有共同研究
産業応用フライブルク大学
京都大学
ミシガン大学
産学連携企業群
産学連携企業群
産学連携企業群
人材交流教育コンテンツ共有研究インフラ共有学術情報共有共同研究
産業応用
図 1 MicROアライアンス構想

マイクロナノバイオマテリアルの機械的特性評価手法の
開発と生体親和材料の創製
- 結晶方位解析に基づいたポリシリコン薄膜のヤング率の有限要素解析 -
工学研究科機械工学専攻 田中 和人
Abstract: The Young’s modulus of polysilicon thin film microelements were evaluated using the previously developed mechanical testing system for thin tensile microelements. The testing system consists of a tensile and fatigue testing machine actuated by a PZT driven positioning stage, a micro manipulation system, a non-contact strain measurement system with a help of a double-filed-of-view microscope. The tested part of the specimen is 250µm in length, 10 µm in width, 3.5 µm in thickness. The Young’s modulus of polysilicon thin film was 133±10 GPa. To analyze the effect of the crystal orientations and the grain size on the Young's modulus, finite element models were developed. Random orientation was given to each grain. When the number of grains increased, the Young's modulus converged on about 170GPa, which was larger than the value obtained by the tensile tests. Key words: MEMS, Polysilicon thin film, Tensile test, Young’s modulus, Crystal orientation, Finite element
analysis
1. 緒言
寿命・余寿命予測の可能な信頼性の高いマイクロマシンや MEMS(Micro-Electro-Mechanical System)の実現にあたっては,これらを構成するマイクロマテリアルの,実際に使用されるサイズにおける機械的
特性を把握することが必要不可欠である.とくに近年,従来は機能材料として用いられてきたポリシリ
コン薄膜などが,構造材料として用いられるようになってきている.このような薄膜では,強度特性の
みならず,設計段階で重要となる弾性係数やポアソン比といった機械的特性も,薄膜の製造方法や製造
条件に大きく依存するため,個々の薄膜の特性を把握する必要があるが,マイクロシステムを設計する
上で必要不可欠な機械的特性データは,十分整備されているとは言い難い. そこで,筆者らは,数µm 程度の厚さの薄膜を対象とした薄膜マイクロエレメント機械的特性評価シ
ステムを開発し,ポリシリコン薄膜を中心に,疲労特性を含んだ機械的特性評価を実施し,その破壊特
性を解明してきた[1], [2].しかし,ポリシリコン薄膜などの多結晶薄膜材においては,製造方法や製造
時の条件により結晶の配向性や分布状態が異なるため,機械的特性を制御するためには,結晶の配向性
やその分布状態が機械的特性に及ぼす影響を解明する必要がある.近年,EBSP(Electron Back-scattering Diffraction Pattern)法と呼ばれる結晶方位解析を用いて,集合組織,配向性,局所的な方位分布,結晶粒
界の評価[3], [4]が行われており,多結晶薄膜における結晶の配向性や分布状態を把握することが可能と
なっている.また,結晶粒に配向性を持たせた多結晶薄膜有限要素モデルを用いて,配向性が多結晶薄
膜の機械的特性に及ぼす影響についても検討されている[5], [6]. 本研究では,ポリシリコン薄膜微小素子を対象として,先に開発した薄膜マイクロエレメント機械的
特性評価システム[1], [2]を用いて,引張荷重下で非接触ひずみ測定システムにより薄膜のヤング率を測
定するとともに,EBSP 法による結晶方位解析をもとに,結晶粒の方位分布や粒子数,結晶粒の大きさ
を考慮した有限要素モデルを用いて,多結晶薄膜材のヤング率を解析するとともに,実験で得られたヤ
ング率と比較・検討した.
第4章 研究成果報告

2. 実験方法と解析方法
2.1 ポリシリコン薄膜の特性評価 用いた試験片は,シリコン基板上に犠牲層エッチン
グにより片持ち梁形状に加工した厚さ 3.8 µm,ゲージ
平行部長さ 250 µm,幅 10 µm のポリシリコン薄膜[1], [2]である.ポリシリコン薄膜の結晶方位解析は,電界放
射型走査電子顕微鏡(FESEM: JEOL, JSM-6500F)に
自動結晶方位解析装置(TSL 社製, OIM(Orientation Imaging Microscopy))を取り付けて,解析における測
定間隔を 150nm として行った. 試験片表面の結晶方位マップを Fig. 1 に,極点図を
Fig. 2 に示す.結晶方位マップ,極点図いずれにおい
ても特定の結晶方位の集中はほとんど見られず,ここ
で用いたポリシリコン薄膜には,特定の結晶方位の偏り
はあまり見られないことがわかる.それぞれの結晶粒の
面積を円形形状に換算して求めた直径分布を Fig.3 に
示す.ここでは,150nm の間隔で測定した結晶方位分
布結果において,隣り合う 5 測定点以上における結晶
の方位差が15度未満であるものを1つの結晶と定義し
た.したがって,直径 0.34 µm 以下の結晶粒は無視さ
れていることになる.Fig.3 より求めた平均結晶粒径は,
0.69µm であった. ポリシリコン薄膜のヤング率測定[1], [2]には,先に開
発した薄膜マイクロエレメント機械的特性評価システム
を用いた薄膜の引張試験により求めた.またひずみは,
200µm のゲージ距離を示す 2 個の突起の変位を二視
野顕微鏡により測定することにより求めた.引張試験は
実験室空気中 (RH 20-60 %, 23±3 ℃)で,引張変位
速度 0.5 µm/s で行った. 2.2 有限要素解析
結晶粒の異方性や結晶粒子数がヤング率に及ぼす
影響を検討するために,有限要素モデルを用いて解
析を行った.ポリシリコン薄膜の表面を原子間力顕微
鏡(AFM: Digital Instruments 社製, NanoscopeⅣ, Dimension 3100)により観察した結果,Fig.1 に示した結晶方
位マップにおける結晶粒とほぼ同じ大きさの円形のこぶ状形状が観察された.本薄膜は,厚さ方向に 4 層に積
層された構造を有しているが,本解析においては,簡単のために膜厚方向に形状の変化しない柱状構造と仮
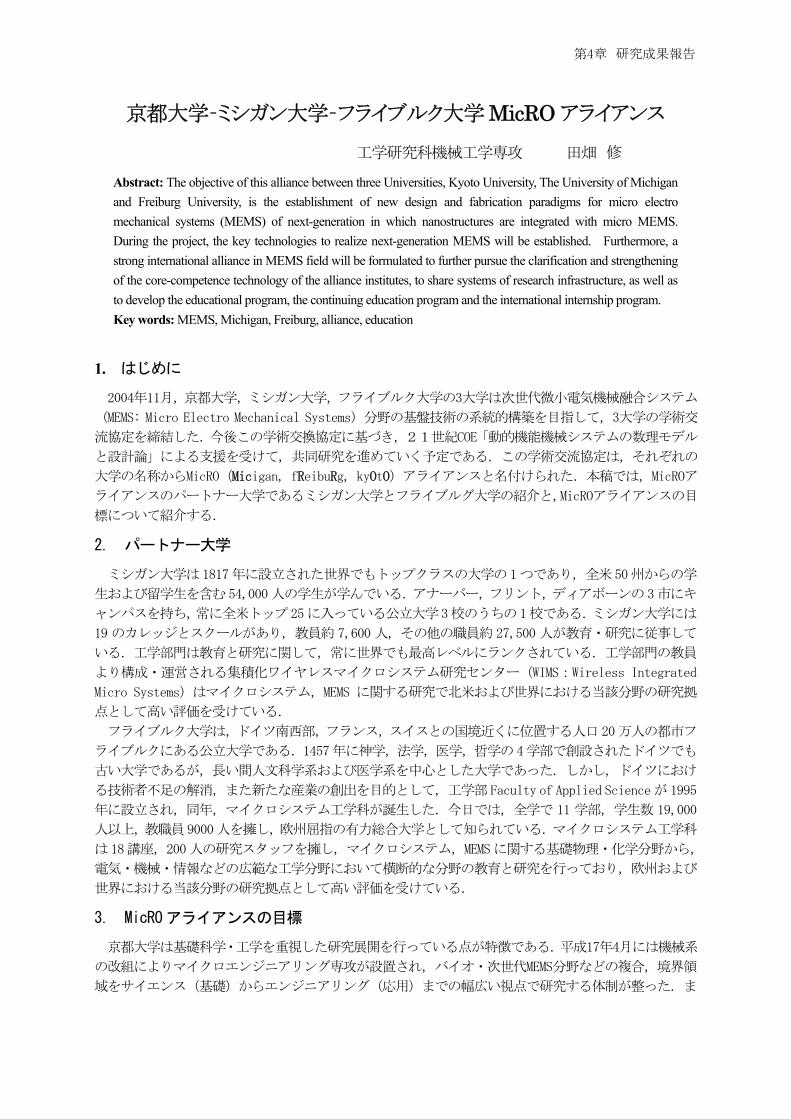
定して,2 次元平面ひずみ状態で弾性解析を行った. 多結晶体のモデル化には,乱数を用いて発生させた核を用いてボロノイ分割[7], [8]したものを用いた.2 次
元平面におけるボロノイ分割とは,平面内にプロットした点について,隣り合う 2 点を結ぶ線分の垂直 2 等分線
の交点をボロノイ点とし,このボロノイ点を次々と結んで領域を分割するものである.6 点の核から作成したボロ
ノイ構造の例を Fig.4 に示す.なお,乱数の発生およびボロノイ点の作成には,The Geometry Center, University of Minnesota が提供する Qhull を用いた[9].ボロノイ構造は,各点で同時に核生成し,かつ同一速
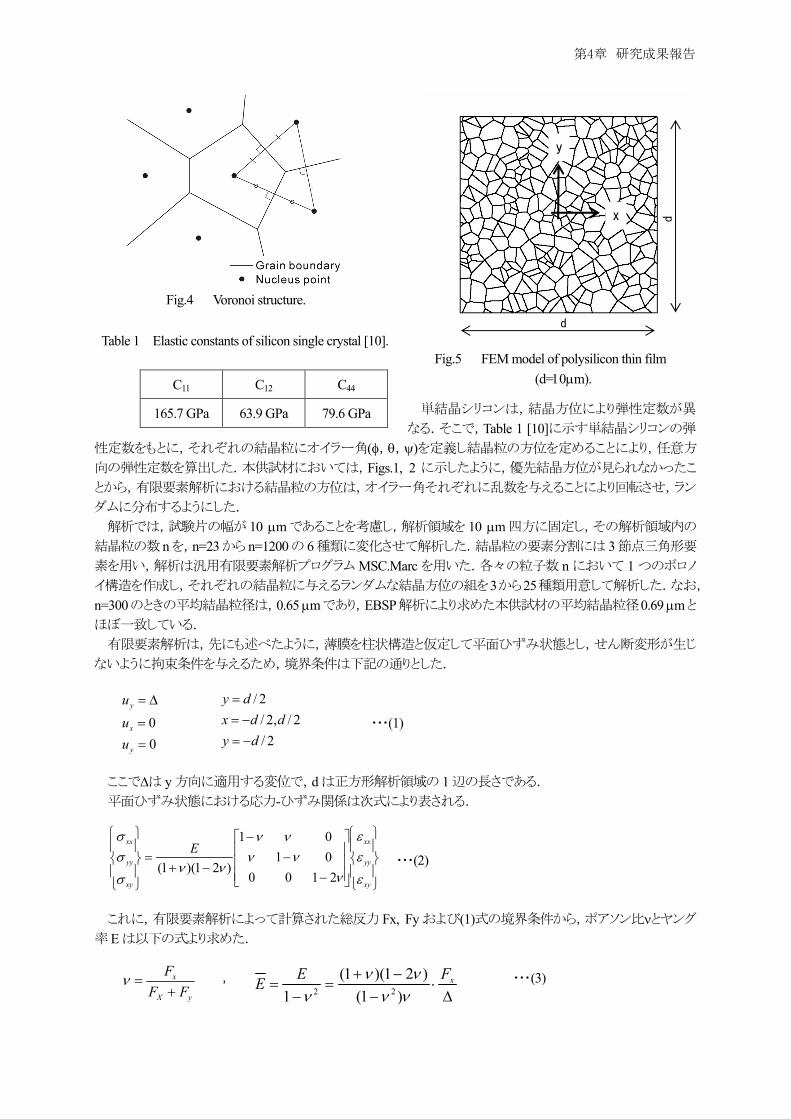
度で成長した場合に生じる構造と考えられる.結晶粒の平均粒径が 0.65 µmの有限要素モデルの一例を Fig.5に示す.
Fig. 2 (0 0 1) pole figure of polysilicon thin film.
0.0 0.4 0.8 1.2 1.6 2.00
100
200
300
400
500
Grain Size µm
Num
ber o
f Gra
ins
Fig.3 Relationship between grain size and number of grains.
Fig.1 Orientation map of polysilicon thin film.
(0 0 1)
TD
LD
単結晶シリコンは,結晶方位により弾性定数が異
なる.そこで,Table 1 [10]に示す単結晶シリコンの弾
性定数をもとに,それぞれの結晶粒にオイラー角(φ,θ,ψ)を定義し結晶粒の方位を定めることにより,任意方
向の弾性定数を算出した.本供試材においては,Figs.1, 2 に示したように,優先結晶方位が見られなかったこ
とから,有限要素解析における結晶粒の方位は,オイラー角それぞれに乱数を与えることにより回転させ,ラン
ダムに分布するようにした. 解析では,試験片の幅が 10 µm であることを考慮し,解析領域を 10 µm 四方に固定し,その解析領域内の
結晶粒の数 n を,n=23 から n=1200 の 6 種類に変化させて解析した.結晶粒の要素分割には 3 節点三角形要
素を用い,解析は汎用有限要素解析プログラム MSC.Marc を用いた.各々の粒子数 n において 1 つのボロノ
イ構造を作成し,それぞれの結晶粒に与えるランダムな結晶方位の組を3から25種類用意して解析した.なお,
n=300 のときの平均結晶粒径は,0.65 µmであり,EBSP解析により求めた本供試材の平均結晶粒径0.69 µmと
ほぼ一致している. 有限要素解析は,先にも述べたように,薄膜を柱状構造と仮定して平面ひずみ状態とし,せん断変形が生じ
ないように拘束条件を与えるため,境界条件は下記の通りとした.
・・・(1) ここで∆は y 方向に適用する変位で,d は正方形解析領域の 1 辺の長さである. 平面ひずみ状態における応力-ひずみ関係は次式により表される.
・・・(2) これに,有限要素解析によって計算された総反力 Fx, Fy および(1)式の境界条件から,ポアソン比νとヤング
率 E は以下の式より求めた. , ・・・(3)
Fig.4 Voronoi structure.
Fig.5 FEM model of polysilicon thin film
(d=10µm).
Table 1 Elastic constants of silicon single crystal [10].
C11 C12 C44
165.7 GPa 63.9 GPa 79.6 GPa
00
==
∆=
y
x
y
uuu
2/2/,2/
2/
dyddx
dy
−=−=
=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−
−+=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
xy
yy
xx
xy
yy
xx E
ε
εε
ννν
νν
ννσ
σσ
21000101
)21)(1(
yX
x
FFF+
=ν∆
⋅−
−+=
−= xFEE
νννν
ν )1()21)(1(
1 22
d
d
y
x
第4章 研究成果報告
3. 実験結果と解析結果
3.1 引張試験 応力-ひずみ曲線は直線的であり,ポリシリコン薄膜は最終破断に至るまで弾性挙動を示してぜい性的に
破断した.実験により求めたヤング率は133±10 GPa[1], [2]であり,ポリシリコンのヤング率の文献値である120~190 GPa の範囲[11]おいては,比較的低めの値となった. 3.2 有限要素解析
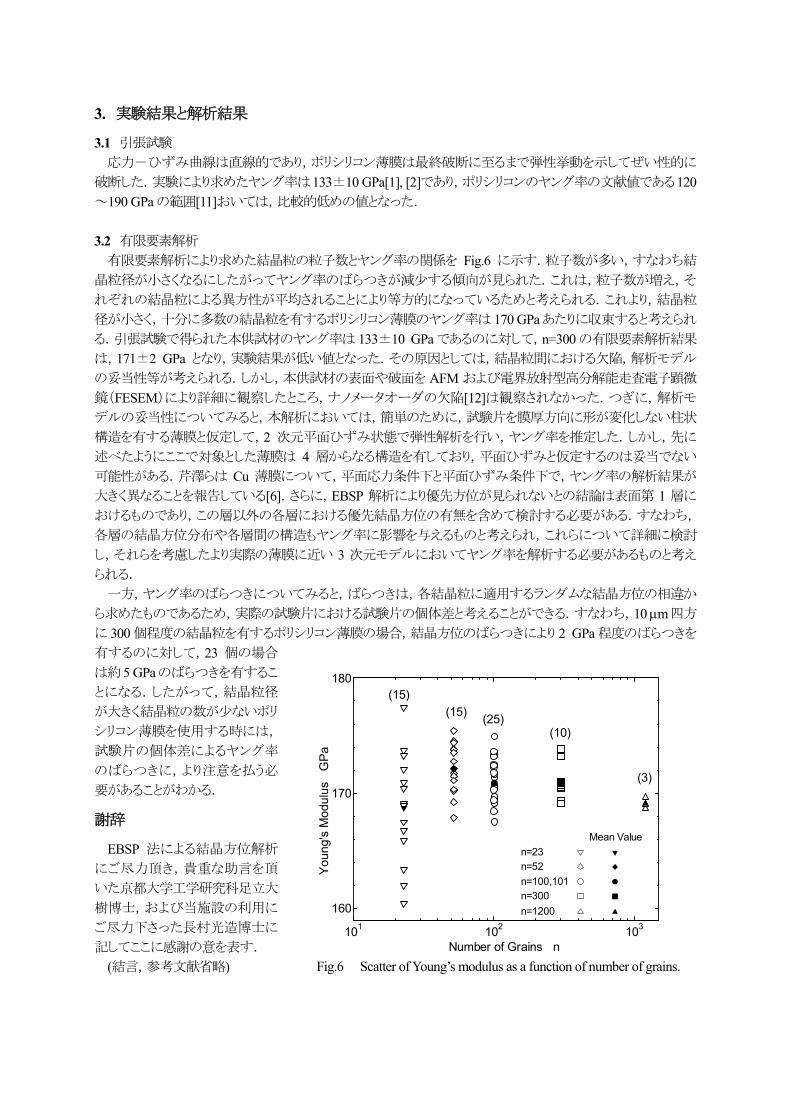
有限要素解析により求めた結晶粒の粒子数とヤング率の関係を Fig.6 に示す.粒子数が多い,すなわち結
晶粒径が小さくなるにしたがってヤング率のばらつきが減少する傾向が見られた.これは,粒子数が増え,そ
れぞれの結晶粒による異方性が平均されることにより等方的になっているためと考えられる.これより,結晶粒
径が小さく,十分に多数の結晶粒を有するポリシリコン薄膜のヤング率は 170 GPa あたりに収束すると考えられ
る.引張試験で得られた本供試材のヤング率は 133±10 GPa であるのに対して,n=300 の有限要素解析結果
は,171±2 GPa となり,実験結果が低い値となった.その原因としては,結晶粒間における欠陥,解析モデル
の妥当性等が考えられる.しかし,本供試材の表面や破面を AFM および電界放射型高分解能走査電子顕微
鏡(FESEM)により詳細に観察したところ,ナノメータオーダの欠陥[12]は観察されなかった.つぎに,解析モ
デルの妥当性についてみると,本解析においては,簡単のために,試験片を膜厚方向に形が変化しない柱状
構造を有する薄膜と仮定して,2 次元平面ひずみ状態で弾性解析を行い,ヤング率を推定した.しかし,先に
述べたようにここで対象とした薄膜は 4 層からなる構造を有しており,平面ひずみと仮定するのは妥当でない
可能性がある.芹澤らは Cu 薄膜について,平面応力条件下と平面ひずみ条件下で,ヤング率の解析結果が
大きく異なることを報告している[6].さらに,EBSP 解析により優先方位が見られないとの結論は表面第 1 層に
おけるものであり,この層以外の各層における優先結晶方位の有無を含めて検討する必要がある.すなわち,
各層の結晶方位分布や各層間の構造もヤング率に影響を与えるものと考えられ,これらについて詳細に検討
し,それらを考慮したより実際の薄膜に近い 3 次元モデルにおいてヤング率を解析する必要があるものと考え
られる. 一方,ヤング率のばらつきについてみると,ばらつきは,各結晶粒に適用するランダムな結晶方位の相違か
ら求めたものであるため,実際の試験片における試験片の個体差と考えることができる.すなわち,10 µm四方
に 300 個程度の結晶粒を有するポリシリコン薄膜の場合,結晶方位のばらつきにより 2 GPa 程度のばらつきを
有するのに対して,23 個の場合
は約5 GPa のばらつきを有するこ
とになる.したがって,結晶粒径
が大きく結晶粒の数が少ないポリ
シリコン薄膜を使用する時には,
試験片の個体差によるヤング率
のばらつきに,より注意を払う必
要があることがわかる.
謝辞
EBSP 法による結晶方位解析
にご尽力頂き,貴重な助言を頂
いた京都大学工学研究科足立大
樹博士,および当施設の利用に
ご尽力下さった長村光造博士に
記してここに感謝の意を表す. (結言,参考文献省略)
Fig.6 Scatter of Young’s modulus as a function of number of grains.
101 102 103
160
170
180
You
ng's
Mod
ulus
G
Pa
Number of Grains n
n=23n=52n=100,101n=300n=1200
Mean Value
(15)(15) (25)
(10)
(3)

ナノ・マイクロ構造物設計のための 異方性異種材界面強度評価技術
工学研究科機械工学専攻 池田 徹
Abstract: Many micro-structures like MEMS and electronic devices are very complicated structures, and they are made by jointing many dissimilar materials. Many of these materials are anisotropic materials as composite materials and single crystals. The delamination between these dissimilar materials is one of the serious problems of reliability of microstructures. The stress intensity factors of an interface crack between dissimilar anisotropic materials are useful to evaluate the fracture toughness of the interface crack. This study proposed new numerical method to calculate the stress intensity factors of an interface crack between dissimilar anisotropic materials under thermal stress in conjunction with the finite element method. This numerical method can provide very accurate stress intensity factors using relatively coarse meshes. Moreover, we demonstrate the application of the stress intensity factors obtained by this technique to evaluate the delamination strength of anodic bonding under thermal stress. It was found out the delamination strength of anodic bonding depends on the anisotropy of the materials. Key words: Micro structure, Fracture mechanics, Stress intensity factors, Interface crack, Anisotropy, Thermal stress 1. 緒 言
接着構造物が各方面で使用されるようになったことや,電子デバイスやマイクロマシンなどの微細構造
物で,多種多様な材料が積層して使用されるようになったことから,異種材料間のはく離や破壊がさまざ
まな分野で信頼性上の大きな問題となっている.異種材界面き裂の応力拡大係数は,異種材界面き裂の定
量的評価をする上でエネルギー解放率や J 積分と並んで重要な破壊力学パラメータである.異方性異種材
界面き裂問題についてはGotoh[1], Clements[2], Willis[3], Bassani and Qu[4], Wu[5]らなどにより研究され,き
裂面の開口変位等が明らかにされた.Hwu[6]は,Stroh Formalism[7]を用いて,異方性異種材界面き裂先端
近傍の変位と応力の漸近解を明らかにし,異方性異種材界面き裂の応力拡大係数を定義した.Qian and Sun[8]は,材料の対称面の一つが,図1に示すき裂周りの座標系における x1–x2軸と平行な直交異方性材料
間の異種材界面き裂の応力拡大係数を求める数値解析手法を提案しているが,任意の異方性材料により構
成される異種材界面き裂の応力拡大係数を精度良く求める手法が無かった. そこで,著者は既報において,Hwu[6]により求められた異方性異種材界面き裂先端近傍の漸近解を利用
して,仮想き裂進展法に重ね合わせの方法を適用した Matos[9]らの方法を適用することで,任意の異方性
異種材界面き裂の応力拡大係数解析を行う手法を開発した[10, 11].また,求めた異方性異種材界面き裂の
応力拡大係数を用いて,MEMSなどでよく用いられる,陽極接合部の破壊強度評価を行った. 2.異方性異種材界面き裂の応力拡大係数
異方性異種材界面き裂の応力拡大係数は,Hwuにより,次のように定義されている[6].
K =KII
KI
KIII
⎧
⎨⎪
⎩⎪
⎫
⎬⎪
⎭⎪
= limr→0
2πrΛ r l k( )− iεα Λ−1
σ12
σ22
σ32
⎧
⎨⎪
⎩⎪
⎫
⎬⎪
⎭⎪
(1)
Λ = λ1, λ2 , λ3[ ] (2)
ここで,rはき裂先端からの距離,lkは任意の代表長さ,<< >>は,α= 1, 2, 3なる対角成分をもつ対角マト
リックスであることを示す.また,λαは,異種材の特性方程式より求められる固有ベクトルである. 均質体中のき裂の場合,モード II,I,IIIの応力場は互いに独立しているが,異方性異種材界面き裂の場
合,一般的にこれらは連成しており,独立したモードは存在しない.ただし,二つの材料が共に直交異方
性材料で,材料の対称面の一つが x1–x2面と平行な場合は,モード III が独立成分となり,モード II と I の
第4章 研究成果報告

みが連成する.また,エネルギー解放率Gと応力拡大係数Kの間には,次のような関係がある[6].
G =14
KT EK, E = D + WD−1W (3)
ここで,DとWは,き裂上下の材料の剛性マトリックスより決定される3×3の実数マトリックスである.
3.解析方法
3.1 応力拡大係数のモード分離 異方性異種材界面き裂の場合,荷重条件が単一モードであっても,
応力拡大係数は混合モード状態となり,モード分離が必要となる.Matos[9]らは,Yau and Wang[12]のM積
分法の考え方を取り入れ,仮想き裂進展法によって等方性異種材界面き裂の応力拡大係数解析を行う手法
を提案している.本研究では,このMatosらの方法を用いることで,解析を行った. まず,解析対象に,あらかじめ変位・応力・応力拡大係数が既知な解を重ね合わせることを考える.解
析対象を状態(1),重ね合わせる既知の解を状態(2),両者を重ね合わせた状態を(1+2)とすると,状態(1+2)
の任意の点の変位,応力,応力拡大係数に次のような重ね合わせの法則が成り立つ.このことを利用して,
3つの独立した既知の解を解析対象に重ね合わせることによって,解析対象の応力拡大係数 K(1)を求める
ことができる.例えば,重ね合わせる既知の解として,異方性異種材界面き裂の漸近解を用いる場合を考
える.この漸近解について,既知の解 (a)[KII=1, KI=0, KIII=0], (b)[KII=0, KI=1, KIII=0], (c)[KII=0, KI=0, KIII=1]の場合を重ね合わせると,次式の連立1次方程式を求めることができる.
E11 E12 E13
E21 E22 E23
E31 E32 E33
⎡
⎣
⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥
KII(1)
KI(1)
KIII(1)
⎧
⎨ ⎪
⎩ ⎪
⎫
⎬ ⎪
⎭ ⎪
= 2G( a )
(1+2) − G (1) − G( a )( 2)
G( b )(1+2) − G (1) − G( b )
( 2)
G( c)(1+2) − G (1) − G( c)
( 2)
⎧
⎨ ⎪
⎩ ⎪
⎫
⎬ ⎪
⎭ ⎪
(4)
これを解くことで,解析対象の応力拡大係数K II(1) , K I
(1) K III(1) が得られる.
4.解析精度の検証
4. 1 遠方で一様応力をうける中央界面き裂をもつ半無限接合板
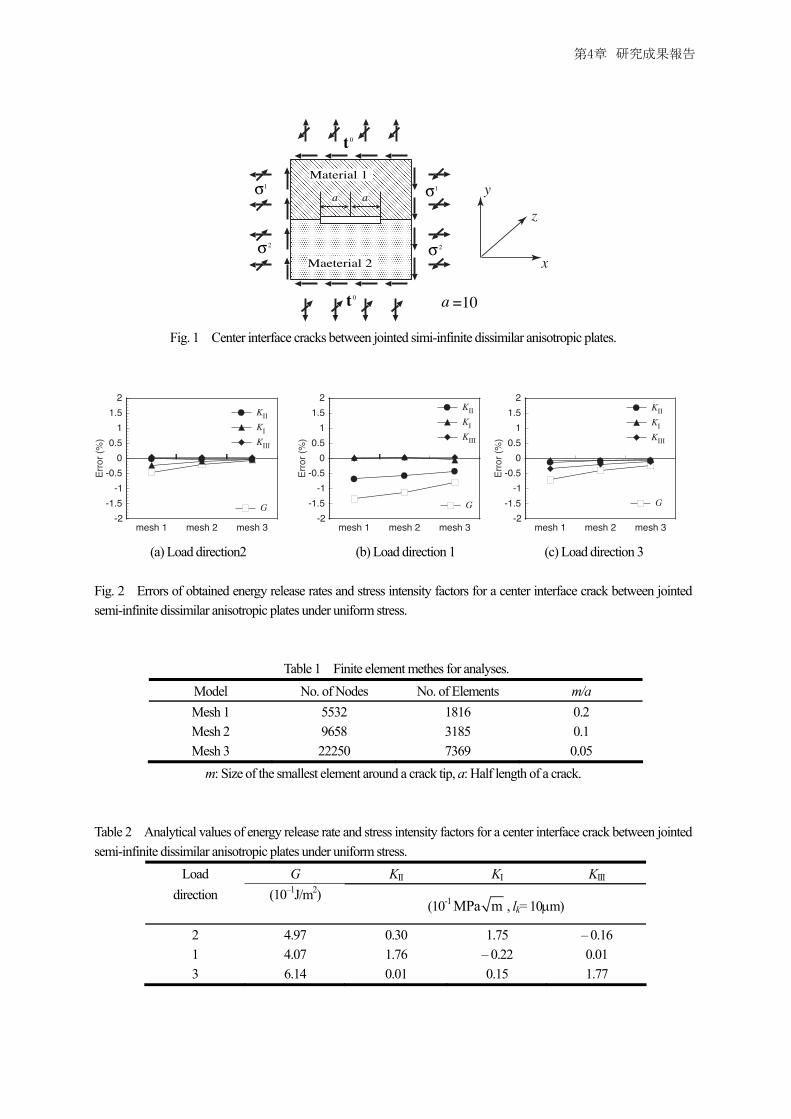
3 章で述べた解析手法の精度を検討するために,図 1 に示すように,中央き裂をもつ異種材接合板につい
て,遠方で一様応力を受ける問題を考える.図で示される無限遠方での一様応力 t0と半無限板1, 2のそれ
ぞれの側面に作用する一様応力σ1, σ2の成分は次式で示される.
t0 =σ12
0
σ220
σ320
⎧
⎨⎪
⎩⎪
⎫
⎬⎪
⎭⎪
, σ1 =σ11
1
σ211
σ311
⎧
⎨⎪
⎩⎪
⎫
⎬⎪
⎭⎪
, σ 2 =σ11
2
σ212
σ312
⎧
⎨⎪
⎩⎪
⎫
⎬⎪
⎭⎪
(5)
有限要素法解析は,8 節点アイソパラメトリック要素を用いて行った.材料の組み合わせとして, GSOとCaSO4の組み合わせについて解析を行った.また,要素分割の精粗が解析値に及ぼす影響を調べるため
に,表1に示すようにMesh 1からMesh 3までの3種類の要素分割を用いて,応力拡大係数の解析精度を
調べた.この問題の理論解は,いずれもHwuによって求められている[13].この問題の理論解は,次式で
示される.
K = − πaΛ (1 + 2iεα ) 2alk
⎛⎝⎜
⎞⎠⎟
− iεα
Λ−1t0 (6)
ここで,a はき裂長さを示す.また,図 1 中のσ1とσ2は,側面にかかる無限遠方での一様応力である.こ
の問題について,無限遠方での一様応力が t0=[0, 1(MPa), 0], t0=[1(MPa), 0, 0], t0=[0, 0, 1(MPa)]の3ケースに
ついて解析した.各ケースの理論解を表2に示す.求めた解析値の理論値に対する誤差を次式のように定
義し,図2に示した.
Material 1
Maeterial 2
σ1
σ 2
aa
a =10
x
y
z
t 0
t 0
σ1
σ 2
Fig. 1 Center interface cracks between jointed simi-infinite dissimilar anisotropic plates.
BB BJ J J
H H HF F F
mesh 1 mesh 2 mesh 3-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Err
or (
%)
B G
J KII
H KI
F KIII
BB
BJ JJ
H H HF F F
mesh 1 mesh 2 mesh 3-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Err
or (
%)
B G
J KII
H KI
F KIII
BB
BJ J JH H HF
F F
mesh 1 mesh 2 mesh 3-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Err
or (
%)
B G
J KII
H KI
F KIII
(a) Load direction2 (b) Load direction 1 (c) Load direction 3 Fig. 2 Errors of obtained energy release rates and stress intensity factors for a center interface crack between jointed semi-infinite dissimilar anisotropic plates under uniform stress.
Table 1 Finite element methes for analyses. Model No. of Nodes No. of Elements m/a Mesh 1 5532 1816 0.2 Mesh 2 9658 3185 0.1 Mesh 3 22250 7369 0.05
m: Size of the smallest element around a crack tip, a: Half length of a crack. Table 2 Analytical values of energy release rate and stress intensity factors for a center interface crack between jointed semi-infinite dissimilar anisotropic plates under uniform stress.
Load G KII KI KIII direction (10–1J/m2)
(10-1 MPa m , lk= 10µm)
2 4.97 0.30 1.75 – 0.16 1 4.07 1.76 – 0.22 0.01 3 6.14 0.01 0.15 1.77
第4章 研究成果報告

Ei =Ki − Ki exact
KIexact2 + K IIexact
2 + KIIIexact2
(7)
ここで,Eiはモード iの解析誤差(%)で,Ki exactは応力拡大係数の理論解である.解析誤差の要素数による
変化を見ると,面内せん断荷重のケース(Load direction 1)を除くと,最小の要素がき裂長さに対して1/5のサイズしかないMesh 1においても,応力拡大係数の解析誤差は,ほぼ0.5%以内に,き裂長さに対して1/20のMesh 3においては,ほぼ0.1%以内におさまっている.また,要素分割を細かくすれば確実に精度は上
昇している.最も細かいMesh 3においても,最小要素法は,き裂長さの1/20もあることから,荒い要素
分割にもかかわらず,非常に精度がよいことが判る.ただし,面内せん断荷重を受ける,き裂の場合は,
やや精度が低い傾向が見られた.
5. 陽極接合部の接合強度評価
陽極接合は,MEMSなどのマイクロ構造物にしばしば用いられている接合法である.ここでは,異方性
異種材界面き裂の応力拡大係数を用いて,陽極接合部の機械的および熱応力によるはく離強度を測定した.
このために,初期はく離を導入した陽極接合試験片を作成し,接合部の定量的強度評価を行った.シリコ
ン基板には,接合面の異方性の影響を見るため,(100)面と(111)面シリコンの二つを用いた.さらに,シリ
コンと線膨張係数が近いことから通常用いられる Pyrex ガラスの他に,線膨張係数が大きく異なるソーダ
石灰ガラスを用いて,熱応力による影響を調べた。 5. 1 機械的試験
試験片は人工的な初期き裂を有した構造とするために,フォトリソグラフィー技術を利用してシリコン
基板上の酸化膜を選択的に除去した後,Pyrex ガラスと陽極接合を行った.これにより,図 3 に示すよう
な形状の試験片を作成することができた.作成した試験片を常温まで冷却し,アルミの引張試験用治具に
接着させた後に精密万能試験機オートグラフで引張試験を行い,破壊荷重を測定した.この際,引張速度
は1mm/minとした.破壊は全ての試験片で脆性的に発生し,き裂はすべてPyrexガラス側に屈曲進展した. 5. 2 熱応力試験
陽極接合部の純粋な残留応力による破壊を観察するため,線膨張係数の差が大きくなるソーダ石灰ガラ
スとシリコン基板でも陽極接合を行い,接合温度(300℃)より,次第に冷却して,熱応力による破壊を観
察した.試験片の模式図を図 4 に示す.この試験片では,図の様に中央の直径 5mm の円形部分が接合さ
れており,周囲のNewton Ring より,はく離を判断できる.(100)面シリコンと接合した試験片は,平均199℃で接合界面からのき裂進展や,はく離が確認できた.き裂は主にシリコン側に進展した.一方,(111)面シ
リコンと接合した試験片は,平均 149℃でニュートンリングの変形が見られ,その後温度の低下につれて
界面に沿ったはく離が見られた.中には,常温にいたるまで接合界面近くのニュートンリングの変形のみ
にとどまり,明確なはく離の進展が観察されないものもあった.そこで,(111)面シリコンとの接合試験片
においては,ニュートンリングの変形をもってき裂進展と判断した.各結晶方向シリコンを用いた陽極接
合部の破壊温度を図5に示す. 5. 4 陽極接合部の破壊靭性
まず,引張試験の破壊荷重に対応する,異方性異種材界面き裂の応力拡大係数を解析した.この際,熱
残留応力については,接合温度からのシリコンと Pyrex ガラスの線膨張係数差による熱応力を考慮した.
求めたエネルギー解放率と応力拡大係数基準の破壊靭性値を表3に示す.解析結果より,すべての試験片
においてモード Iが支配的であるが,わずかにモード IIと IIIの影響があることがわかる. また,熱応力により進展した,シリコンとソーダ石灰ガラスの界面上の三次元き裂について,三次元有
限要素法解析に変位外挿法を適用して,破壊温度における応力拡大係数を求めた結果を表4に示した.(100)ウエハでは,応力拡大係数の角度異存性が見られ,結晶軸から π/4 の方向が最大となる.また,この方向
に(111)へき開面が存在するため,破壊靭性値が低くなっていることがわかる.一方,等方性面である(111)

Pyrex glass
Si
Epoxy resin
0.5mm
Fig. 3 Schematic of mechanical fracture test specimen and the microphotograph around of fractured specimen.
Soda glass
Si Chip
Bonding area
Newton ring
B
J
0
50
100
150
200
250
(100) (111)
199.25
149.0C
ritic
al T
empe
ratu
re (
˚C)
Orientation of Crystal Fig. 4 Schematic of fracture specimen for thermal load. Fig. 5 Critical temperatures of thermal tests.
Table 3 Fracture toughness of cracks in anodic bonding joints under mechanical load. Bonded plane Fracture load GC KI KII KIII
(N) (kJ/m2) MPa m, lk = 10µm (100) 268 8.30 0.841 – 0.210 0 (111) 240 6.17 0.709 – 0.306 0.063
Table 4 Fracture toughness of cracks in anodic bonding joints under thermal load.
Bonding plane Angle θ KI KII (rad) MPa m, lk = 10µm
0 0.056 – 0.788 π/4 0.108 – 0.859
(100)
π/2 0.086 – 0.789 0 0.159 – 1.331
π/4 0.189 – 1.341
(111)
π/2 0.158 – 1.322 ウエハでは,応力拡大係数の方向依存性は無い.また,(111)面がへき開面であるため,き裂はシリコン側
に屈曲せずに界面に沿うように破壊し,破壊靭性値が上昇したものと考えられる.また,シリコンとソー
ダガラスの熱応力による破壊靭性値は,シリコンとPyrexガラスの常温での破壊靭性値(モード I)よりも
大きく,シリコンとソーダ石灰ガラスの陽極接合の真の接合強度が決して低くはないことがわかった.ま
た,この結果より,通常のシリコンと Pyrex ガラスの陽極接合部においても,(111)ウエハを用いた場合の
第4章 研究成果報告
方が,熱残留応力による疲労破壊に対してもかなり強靱であることが推定される. この様に,破壊モードと材料の異方性および結晶のへき開の性質により,陽極接合部は,多様な破壊形
態を示すことがわかった. 6.結 言 (1) 異方性異種材界面き裂の漸近解を利用して,仮想き裂進展法に重ね合わせの方法を適用することで,
機械的負荷と熱応力下の異方性異種材界面き裂の応力拡大係数を解析する手法を開発した.本解析手法に
より,一般の異方性異種材界面き裂の応力拡大係数を精度良く求めることが可能となった. (2) 開発した手法を用いて,シリコンとガラスの陽極接合部の機械的負荷および熱応力負荷による破壊靭
性値の測定を行った.その結果,負荷モードや結晶方向に違いにより,破壊靭性値や破壊の形態に大きな
違いが生じることが判った.この様に異方性異種材界面き裂の応力拡大係数を用いることにより,異方性
材料接合体の界面き裂の破壊を定量的に評価することが可能となった.
文 献
[1] Gotoh, M., Some Problems of Bonded Anisotropic Plates with Cracks along the Bond, International Journal of Fracture Mechanics, 3, (1967), pp. 253-265.
[2] Clements, D. L., A Crack between Dissimilar Anisotropic Media, International Journal of Engineering Science, 9, (1971), pp. 257 - 265.
[3] Willis, J. R., Fracture Mechanics of Interfacial Cracks, Journal of the Mechanics and Physics of Solids, 19, (1971), pp. 353 - 368.
[4] Bassani, J. L. and Qu, J., Finite Crack on Bimaterial and Bicrystal Interfaces, Journal of the Mechanics and Physics of Solids, 37, (1989), pp. 435-453.
[5] Wu, K. C., Stress Intensity Factor and Energy Release Rate for Interfacial Crack between Dissimilar Anisotropic Materials, ASME Journal of Applied Mechanics, 57, (1990), pp. 882-886.
[6] Hwu, C., Collinear cracks in anisotropic bodies, International Jounral of Fracture, 52, (1991), pp. 239-256.
[7] Stroh, A. N., Steady State Problems in Anisotropic Elasticity, Journal of Mathematical Physics, 41, (1962), pp.77-103.
[8] Sun, C. T. and Qian, W., The Use of Finite Extension Strain Energy Release Rates in Fracture of Interfacial cracks, International Journal of Solids and Structure., 34, (1997), pp. 2595-2609.
[9] Matos, P. P. L., McMeeking, R. M., Charalambides, P. G. and Drory, M. D., A Method for Calculating Stress Intensities in Bimaterial Fracture, International Journal of Fracture, 40, (1989), pp. 235-254.
[10] 山長 功, 池田 徹, 宮崎 則幸, 異方性異種材界面き裂の応力拡大係数解析,日本機械学会論文集(A編), 第69巻, 第687号, (2003), pp. 1531-1538.
[11] 永井政貴,山長 功,池田 徹,宮崎 則幸,日本機械学会論文集(A編),投稿中.
[12] Yau, J. F. and Wang, S. S., An Analysis of Interface Cracks between Dissimilar Isotropic Materials Using Conservation Integrals in Elasticity, Engineering Fracture Mechanics, 20-3, (1984), pp. 423-432.
[13] Hwu. C, Explicit Solutions for Collinear Interface Crack Problems, International Journal of Solids and Structures, 30, (1993), pp. 301-312.

マイクロ・ナノ材料用高サイクル疲労試験装置の開発と
機械的物性データベースの構築
工学研究科機械工学専攻 土屋 智由
Abstract: The development of the measurement system and the measurement of thin film mechanical properties are being carried out in order to build the mechanical property database for micro/nano-materials. In this research, we have developed a fatigue tester for micro/nano-materials and carried out tensile and fatigue tests of both single crystal silicon and sputtered aluminum films. The specimens of silicon and aluminum were 2 and 1 µm thick, 20 and 50 µm wide, and 100 or 500 µm long, respectively. The tensile strength of silicon ranged from 3.1 to 5.2 GPa, and the silicon specimen fractured during cyclic loading. The aluminum specimen showed ductility and the maximum stress was 150 MPa. Key words: MEMS/NEMS, Micro/Nano-materials, Mechanical properties, Database, Fatigue test.
1. はじめに
マイクロ,ナノスケールの微小な機械(MEMS/NEMS: Micro/Nano Electro Mechanical Systems)では従
来のマクロスケールの機械では無視できる力(たとえば摩擦/磨耗力,静電気力,ファンデルワールス力,
化学親和力など)を含めて様々な力が複雑に作用する場を考慮してその動作特性を解析する必要がある.
また,マイクロ/ナノマシンに用いられる構造材料は分子・原子の堆積による方法(物理/化学気相成長,
イオン照射,熱処理による改質)で形成され,かつ分子・原子を基本単位とする方法(イオン照射,プ
ラズマエッチング,化学エッチング)を用いて加工されるため,構造材料そのものが非常に複雑な系と
して構成されている.このため MEMS/NEMS における設計は従来にない複雑系として取り扱わなけれ
ばならない. この設計においてマイクロ/ナノ構造材料の機械的物性値は必要不可欠であるが,上記の理由により既
存のバルクの物性値を用いることが事実上困難である.また,マイクロ/ナノ材料の機械的物性値の評価
は測定上の困難さから十分行われてきていない.そこで本研究は,これらのマイクロ/ナノ材料の機械的
物性値を測定し体系化することによって,MEMS/NEMS デバイスのモデリング,設計に貢献できる物性
値データベースを構築することを最終目標としている.ここでは実用デバイスの信頼性評価のために重
要な強度,疲労特性の測定をめざし,マイクロ/ナノ材料の引張モードの疲労試験装置の開発と半導体材
料を中心とした疲労破壊特性の測定を実施する. 本年度は,われわれが独自に開発した静電チャック方式という試験片のチャッキング技術を用いた薄
膜引張試験装置を改良し,疲労試験を実施し,静電チャック方式の疲労試験への適用性について検討し
た.試験材料として単結晶シリコンとスパッタアルミ薄膜を用いた.本報告ではまず,疲労試験装置の
開発についてのべ,その後に SOI ウエハより作製した厚さ 2 µm の単結晶シリコンとスパッタで成膜し
たアルミ薄膜について,引張試験と疲労試験を行った結果を記述する.
2. 疲労試験装置
2.1 装置構成 今回疲労試験に用いた静電チャック方式の薄膜引張試験装置について簡単に紹介する.
図 1に静電チャックの原理と装置の構成を示した.静電チャックでは片持ち梁に形成した試験片の自由
端をチャックに静電力で固定し,引張試験する(右図).今回の試験材料はいずれも導電性材料なので試
験片とチャックの間に電圧約 160V を印加する.チャックはシリコンウエハを用い,窒化膜を表面に成
膜し,印か電圧の短絡を防ぐ.積層圧電素子を用いた試料台ステージの変位で荷重を印加する.このス
テージは平行板ばね機構を用い,変位は板ばね上の半導体ひずみゲージを用いた.荷重はロードセル(秤
第4章 研究成果報告

量1N)で測定した.圧電ステージは外部電圧入力で制御可能な DC 電源で駆動する.これは D/A コン
バータの出力でパソコンから制御し,その変位とロードセルの出力はA/D ボードを用い,パソコンで計
測する. この引張試験装置を疲労試験に適用する上での検討項目は以下のとおりである.
1. 静電チャックによる固定の安定性:原理的に試験片を保持する力はあまり大きくない.疲労試
験中にチャックがずれ,最悪の場合には試験片が外れる可能性がある.短時間の引張試験ではこのよ
うな現象はほとんどない. 2. 計測系の安定性:変位,荷重計測の感度やオフセットが長期間の試験で変動する可能性がある.
いずれも,長期間の試験によって発生する可能性がある問題である.
Tensile Force Chuck
Electrostatic Force
Specimen Thickness: 0.5~2 µm
Free
Fixed To Substrate
Z Stage
Microscope Force Sensor
Case
Probe
Specimen
Heater
Antivibration Table
X Stage X,Y Stage θz Stage
X PZT Stage PZT Stage Controller
Temperature Controller
Force Sensor Pre-Amp
Z Stage Controller
Electrostatic Force Grip Controller
Tester Controller Testing part
PC
図 1 静電チャック方式の薄膜引張試験装置.右:静電チャックの原理.左:装置の構成
2.2 制御方法 従来の引張試験装置では圧電ステージの印加電圧を一定速度で増加させ,圧電ステージ
の変位をステージの板ばねに貼り付けたひずみゲージで,荷重をロードセルで測定していた.引張試験
の場合はこのような開ループの制御で計測が可能であるが,疲労試験の場合は(1)ひずみ,あるいは
(2)応力の振幅を一定に保つ必要があり閉ループ,すなわちステージ変位やロードセルの荷重によっ
て圧電ステージの印加電圧を適切に変化させる必要がある.しかし,圧電ステージ印加電圧での変位制御
は圧電素子のヒステリシスのためにほとんど不可能である. そこで疲労試験の場合は試験開始時に破断しない程度の低い荷重範囲で準静的試験を行って,圧電素子
印加電圧-圧電ステージ変位-ロードセル出力の関係を調べておき,初期の荷重を決定することとした. また,疲労試験中も常に荷重あるいは圧電ステージの変位をモニタして設定された荷重あるいは変位振
幅となるように圧電素子の印加電圧を変化させている.また,破断や異常による荷重の大きな変化があ
った場合には自動的に荷重印加を停止する. これらの機能を実装して作成したプログラムの実
行画面(疲労試験中)を図 2に示す.左上のウィ
ンドウに現れているのが圧電ステージ変位とロー
ドセル荷重のモニタである.この場合,荷重振幅
を一定として試験している.このモニタ画面に重
なっているのがメインウィンドウで前述の較正用
の引張試験の結果が表示されている. このプログラムを用いて実際に試験をしている状
態を試験片上方から観察したのが図 3である.図
中の右に示した断面図にあるように図上方にチャ
ックのためのプローブがあり,これが試験片の自
由端(チャック部)に覆いかぶさるようになって
いる.これに電圧を印加して試験片が固定される.
図 2 制御ソフトウェア実行画面

チャック後圧電ステージの変位により基板が下方に変位し,引張荷重を試験片に印加する. 静電チャックの把持力は大きくないために試験中のチャックの信頼性が懸念されたが現時点では微小に
すべるような現象は観察されない.ただし,高電圧を印加したまま長期の繰り返し荷重を印加するので,
チャックの絶縁膜が絶縁破壊してチャックが不能になる現象が発生した.引張荷重が静電チャックの把
持力の限界に近い場合は注意が必要となった.
チャック
変位
圧電
ステージ
試験片
シリコン
図 3 疲労試験中の試験片(右:断面図)
本節で述べた装置の改良により,繰り返し荷重印加による疲労試験が可能になった.しかし,疲労試験
装置としてはいくつかの課題が残っている. 繰り返し周波数:現システムでは荷重印加周波数は最大1Hz である.これは圧電ステージの印加電圧の
制御に DC 電源を用いているためである.圧電素子の駆動に専用のアンプを用いることで数十 Hz まで
実現可能であると考える. ロードセル,ひずみゲージの零点ドリフト:ロードセルおよび圧電ステージの変位計測に用いているひ
ずみゲージは零点ドリフトがある.ロードセルは 0.15gf 程度(フルスケールの 0.15%)程度のドリフト
が観察されている.後述のシリコン試験片の破断荷重が 10~20 gf 程度なので影響は小さいが,アルミ試
験片は降伏点が 0.5~1 gf 程度なので測定に大きく影響する.圧電ステージのひずみゲージも同様の問題
があり(ドリフト量は未測定).長期の繰り返し荷重印加のためには定期的に零点を較正するなどの対策
が必要である.
3. シリコンの疲労試験
疲労試験用に改良を施した静電チャック方式の薄膜引
張試験装置を用い,単結晶シリコン試験片の引張試験
および疲労試験を行った. 3.1 試験片 貼り合わせ SOI ウエハ(厚さ 2 µm)より
製作した単結晶シリコン試験片である.形状により 2種類あり,試験片全体を図 4に示した.試験片の左側
は基板に固定され,右側の矩形部は静電チャックで把
持される(チャック部).このチャック部はプロセス中
の試験片の破損を防ぐため,4 本の幅 20 µm の梁で固
定されており,試験前にこれは切断される.試験片の
試験部(ゲージ部)の寸法は幅 20 µm, 平行部長さ 120 µm と 600 µm,ゲージ部上に中央に対して対称な位置
に標点が形成され,この間隔は 100 µm と 500 µm であ
る.厚さは 2 µm±0.5 µm である.
500 µm
図 4 単結晶シリコン試験片
第4章 研究成果報告

3.2 引張試験 疲労試験における繰り返し印加荷重
を決定するために長さ 100 µm の試験片について引
張試験を行った.試験片4個に対して引張強度は3.6, 4.4, 4.5, 5.1 GPa であり,平均は 4.4 GPa であった.
これは以前に引張試験のラウンドロビンテストで評
価した単結晶シリコンの引張強度に対してほぼ倍の
強度となった. 今回の実験では試験片平行部上の標点による伸び計
測は行わなかった.そこで図 5のように平行部の長
さの異なる引張試験によるステージ変位と引張荷重
からヤング率を概算したところ約 175 GPa であった.
単結晶シリコンの<110>方向の理論値や他の報告の
ヤング率とほぼ一致しており,測定に問題がないこ
とが確認できた. 3.3 疲労試験 前述の引張試験結果に基づき,疲労試験を行った.最大応力は引張強度の約 80%程度と
して,3.5 ~ 3.6 GPa とし,応力比は 0.15 とした.6 個の試験片に対して最大 106回の繰り返し荷重印加を
行った.結果,このうち 4 個の試験片について繰り返し荷重印加中に破断が観察された.残りの1つは
1 回目に破断し,もうひとつは 106回で破断しなかった.この破断しなかった試験片については疲労試験
後に引張試験を行い,引張強度を測定したところ 5.6 GPa であった.繰り返し荷重印加中に破断した試
験片の破断時の荷重とステージ変位の計測結果を図 7に示した.ステージ変位が最大すなわち荷重が最
大のときに破断が発生している.なお荷重は最大ではないがロードセルアンプの応答性に起因するもの
と考えている. 結果を引張強度の測定結果と同時に図 6に示した.3 回から 2.8×105回の広い範囲の繰り返し回数で破
断が発生している.もとの強度のばらつきが大きいため,現在の測定点数では結果について十分説明で
きないが本手法で単結晶シリコンの疲労試験が実施可能であることが確認できた.
図 7 破断時の荷重,ステージ変位
y = 0.1256x - 0.4294
y = 0.1881x - 0.4821
0
1
2
3
4
0 5 10 15 20
L=600µm
L=120µm
引張応力 (G
Pa)
ステージ変位 (µm)
図 5 ヤング率の測定
0
1
2
3
4
5
6
1 10 102 103 104 105 106
引張応力
(GP
a)
繰り返し荷重回数
引張試験
疲労試験
107
図 6 引張試験,疲労試験の結果.疲労試験の結果のう
ち灰色の点は破断せず.この試験後の引張強度を白抜き
の菱形で示している.
3. アルミ薄膜の疲労試験
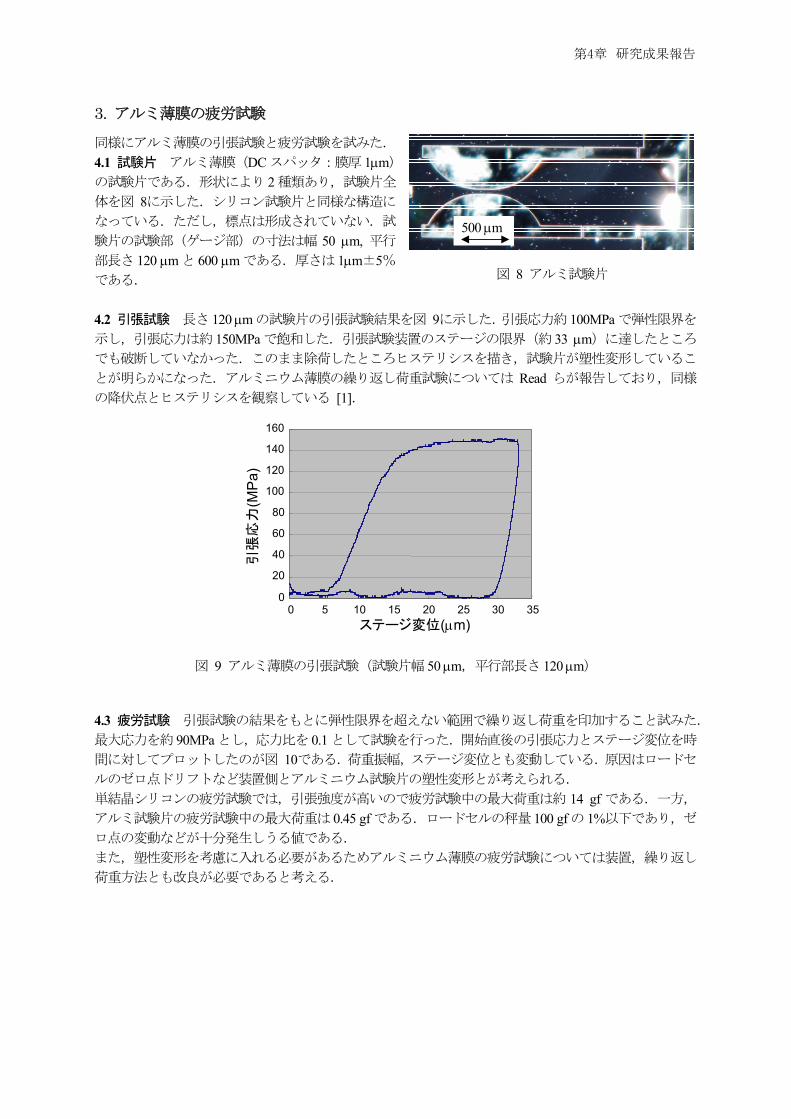
同様にアルミ薄膜の引張試験と疲労試験を試みた. 4.1 試験片 アルミ薄膜(DC スパッタ:膜厚 1µm)
の試験片である.形状により 2 種類あり,試験片全
体を図 8に示した.シリコン試験片と同様な構造に
なっている.ただし,標点は形成されていない.試
験片の試験部(ゲージ部)の寸法は幅 50 µm, 平行
部長さ 120 µm と 600 µm である.厚さは 1µm±5%である. 4.2 引張試験 長さ 120 µm の試験片の引張試験結果を図 9に示した.引張応力約 100MPa で弾性限界を
示し,引張応力は約 150MPa で飽和した.引張試験装置のステージの限界(約 33 µm)に達したところ
でも破断していなかった.このまま除荷したところヒステリシスを描き,試験片が塑性変形しているこ
とが明らかになった.アルミニウム薄膜の繰り返し荷重試験については Read らが報告しており,同様
の降伏点とヒステリシスを観察している [1].
0
20
40
60
80
100
120
140
160
0 5 10 15 20 25 30 35
引張
応力
(MP
a)
ステージ変位(µm)
図 9 アルミ薄膜の引張試験(試験片幅 50 µm,平行部長さ 120 µm)
4.3 疲労試験 引張試験の結果をもとに弾性限界を超えない範囲で繰り返し荷重を印加すること試みた.
最大応力を約 90MPa とし,応力比を 0.1 として試験を行った.開始直後の引張応力とステージ変位を時
間に対してプロットしたのが図 10である.荷重振幅,ステージ変位とも変動している.原因はロードセ
ルのゼロ点ドリフトなど装置側とアルミニウム試験片の塑性変形とが考えられる. 単結晶シリコンの疲労試験では,引張強度が高いので疲労試験中の最大荷重は約 14 gf である.一方,
アルミ試験片の疲労試験中の最大荷重は 0.45 gf である.ロードセルの秤量 100 gf の 1%以下であり,ゼ
ロ点の変動などが十分発生しうる値である. また,塑性変形を考慮に入れる必要があるためアルミニウム薄膜の疲労試験については装置,繰り返し
荷重方法とも改良が必要であると考える.
図 8 アルミ試験片
500 µm
第4章 研究成果報告

0 20 40 60 80 100
0 5 10 15 20 25 300
2
4
応力
(MP
a)
ステージ
変位
(µm
)
Time(s)
図 10 繰り返し荷重印加中の応力,変位の変動
5. まとめと今後の展望
静電チャック方式を用いた薄膜引張試験装置を改良し,単結晶シリコンとスパッタアルミ薄膜の疲労
試験を行った.単結晶シリコンでは疲労破壊が観察され,疲労試験装置としての性能を確認した.今後,
アルミ薄膜を含めて,試験を行っていく. また,本装置を高繰り返し周波数印加可能な疲労試験装置に改良するとともに,試験環境制御を行う
ことを目指す.そしてマイクロ/ナノ材料の物性値(ヤング率,引張強度,疲労強度)のデータベースを
構築していく予定である. これらのデータは,現在実用化が急速に進んでいる MEMS/NEMS デバイスの信頼性の設計,評価に
対して大きく貢献する.MEMS/NEMS では剛性に対して質量が小さいために共振周波数が高く,信頼性
設計において従来よりも高サイクルの信頼性/疲労試験が必要である.一方,マイクロ/ナノ材料では容
易に(短時間で)熱的平衡に到達するので,従来よりも高速(高繰り返し周波数)の疲労試験をするこ
とが可能であるという考えが示されている.しかし,これらの仮説は未だ実証されておらず,本研究に
よってこれらの考え方を実証すると共に,世界に先駆けて新しい MEMS/NEMS デバイスの設計クライ
テリアを構築することができると期待される.
参考文献
[1] D.T. Read and J. W. Dally, “Fatigue of microlithographically- patterned free-standing aluminum thin film
under axial stresses,” J. Electronic Packaging, Trans. ASME 117 (1995) 1-6.

生体組織マトリクスの変形・損傷場と細胞ネットワークの相互作用
工学研究科機械工学専攻 田中 基嗣
Abstract: This study investigated the mechanism of the response of the isolated osteocyte to mechanical stimulus, as the first step to clarify the complex mechanisms of mechanosensing and signal transduction of osteocyte network in the living tissue matrix. It is the key to clarifying the mechanism of the adaptive bone remodeling/regeneration process. In vitro observation of change in intracellular Ca2+ density accompanied by mechanical stimulus to osteocyte cell body was carried out, and the sensitivity of osteocyte cell body was compared with that of osteoblast cell body. The response property of osteocyte cell body was discussed with considering the structure of actin filaments, which play an important role in signal transduction for mechanical stimulus. Key words: Osteocyte network, Mechanosensory mechanism, Signal transduction, Living tissue matrix
1. はじめに
骨基質内に存在する骨細胞(図 1)は,骨梁に
対する力学的負荷にともなって生じる骨基質(生
体組織マトリクス)の変形・損傷場を感知し,ギ
ャップジャンクションにより形成した骨細胞ネッ
トワークにより情報を伝達する働きを持っている
と考えられている[1-3].伝達された情報は, 終
的に骨梁表面に存在する骨芽細胞・破骨細胞に伝
達され,これらの細胞の代謝活動に影響を与え,
力学的刺激に適応した骨梁構造の変化・再構築(リ
モデリング)が達成されると考えられている.すなわち,骨基質内に存在する骨細胞の力学的刺激感知
メカニズムおよび骨細胞間の情報伝達メカニズムを明らかにすることが,骨の適応的リモデリングメカ
ニズムを解明する上で重要なキーポイントとなる.しかしながら,骨基質中に埋め込まれた形で存在す
る骨細胞は,その直接観察・単離・精製が困難であったため,骨組織の他の細胞と比べて研究が遅れて
いたが,細胞の単離法の確立[4],また骨細胞樹立株の確立[5]により,生化学刺激や力学刺激に対する細
胞応答を観察した例が報告されるようになった[6-10].しかし,これらの研究は,主に流れによる刺激や
静水圧刺激など,細胞全体に一様に負荷される刺激に対する細胞応答の検討であり,単一の細胞におけ
る刺激の負荷に対する応答特性,および刺激負荷の部位と細胞応答の発生を詳細に関連付けている報告
例は少ない.そのため,骨細胞の詳細な力学的刺激感知・情報伝達メカニズムは明らかになっていない
のが現状である.本研究では,変形・損傷場におかれた生体組織マトリクスにおける,骨細胞の複雑な
力学的刺激感知・情報伝達メカニズムを明らかにすることを目的とする.その第一歩として,本報では,
骨細胞単体の力学的刺激に対する応答メカニズムの素過程を詳細に解明することを目指した[11].多く
の細胞において力学刺激の情報伝達に重要な役割を果たしているとされるアクチンフィラメントと細胞
内カルシウムイオンに着目し,骨細胞のアクチンファイバー構造の観察と,細胞体への局所刺激に対す
る細胞内カルシウムイオン濃度変化の in vitro 観察を行った.
2. 実験方法
2.1 骨細胞単離・培養方法 本研究では,13日齢ニワトリ胚頭蓋冠より,Tanaka-Kamiokaらによるプロ
トコル[12]を用いて単離した骨細胞を用いた.まず,採取した頭蓋冠を剪刀で細かく裁断し,Collagenase Type I溶液(1g/ml)中で振盪させ(温度37℃,振盪速度100rpm,振盪時間30分間),組織片の骨膜を除去
骨細胞
骨小腔間質液
細胞突起
骨細管
流れ
ギャップジャンクション
骨細胞
骨小腔間質液
細胞突起
骨細管
流れ
ギャップジャンクション
図 1 骨細胞ネットワークの模式図
第4章 研究成果報告

した.この過程により,頭蓋冠表面の骨芽細胞などの細胞群を骨膜ごと除去し,観察対象を骨組織と骨組織中
の骨細胞のみに限定することができる.次に,D-PBSを溶媒とする5% EDTA溶液中で2回振盪させ(温度
37℃,振盪速度100rpm,振盪時間15分間)た.この過程により,骨組織が脱灰され,骨組織中の細胞が骨
組織のコラーゲン成分とともに露出する.露出した骨組織中の細胞をコラーゲンから解放するため,再
度Collagenase Type I溶液(1g/ml)中で振盪させ,コラーゲンを酵素消化した.振盪後,溶液に対し遠心
分離を行い,上澄みを除いた沈殿物を10% FBSのa-MEM中に分散させ,この細胞を含む液体培地を孔径
8.0µmのメンブレンフィルタ(φ=25mm, SCWP02500, MILLIPORE)で濾過した.骨細胞は骨組織を形成
する他の細胞に比べて細胞体が小さいため,この濾過過程により,骨組織を形成する細胞群から骨細胞
を分離することができる.濾過した液体培地に対し再度遠心分離を行い,上澄みを除いた沈殿物を,0.5% NaCl溶液と培地を1:1で混合した溶液に分散させ,血液細胞など骨細胞以外の細胞を死滅させた.その後,
培地を加えて混合液を希釈し,遠心分離を行い,骨細胞を単離した. このように単離した骨細胞を,5.0×103~1.0×104 cells/dishの細胞密度で,poly-D-lysineコーティング
および20µg/ml fibronectinコーティングを施したガラスボトムディッシュ(φ=35mm)に播種した.細胞
の培養には,10% FBS溶液を加えたα-MEMを用いた.温度37℃,湿度100%,5%CO2-95%Airの環境下で
15~18時間培養した. 2.2 単離骨細胞内のアクチンフィラメント構造の観察 単離・培養した骨細胞をD-PBS溶液で洗浄し,
4℃の環境で 5% paraformaldehyde 溶液に 30 分間浸して細胞を固定した.その後,固定した細胞を染色す
るため,室温で 0.1% Triton-X 溶液に 10 分間浸して脱膜したのち,rhodamine-phalloidin 溶液とD-PBS 溶
液を 1:400 の重量比で混合した染色液により,37℃の環境で 150 分間浸染させた.染色後,D-PBS によ
る 10 分間の洗浄を 3 回行うことにより染色液を除去し,観察試料とした. 観察には,共焦点レーザー走査型蛍光顕微鏡(LSM510,Carl Zeiss)を用いた.対物レンズは 63 倍油侵レ
ンズを使用した.観察波長帯域は 赤色(534nm ,Long Pass)とした.
2.3 単離骨細胞への局所変形負荷に対する応答観察 本実験では,力学刺激に対する細胞応答としての
Ca2+濃度の変化を観察するために,Ca2+蛍光指示薬 Fluo-4 AM(1mM solution in DMSO, Molecular Probes, Inc.)を細胞内に導入し,蛍光観察を行った.Ca2+蛍光指示薬は細胞内 Ca2+の濃度変化を可視化するもの
であり,細胞内Ca2+濃度に応じて蛍光が変化する.本実験で用いた Fluo-4 は,濃度上昇に応じて輝度が
上昇する蛍光特性を有している.まず,単離・培養した骨細胞を D-PBS で洗浄後,Opti-MEM(Gibco)にFluo-4 AM を 5mM の濃度で添加した培地で 30 分間培養し,細胞内に蛍光指示薬を導入した.その後,
D-PBS を用いて洗浄することにより細胞外の蛍光指示薬を除去し,通常培地と入れ替えたものを観察試
料とした. 次に,骨細胞に対する局所変形負荷方法について説明する.本実験では,単一の骨細胞に局所的な力
学刺激を負荷するため,先端部を直径φ=約 2µm の滑らかな状態に加工したガラス製マイクロニードルを
直接押し込むことによって変形を与えた(図 2).まず,顕微鏡に取り付けた三次元液圧式マイクロマニ
ピュレーター(MM-188NE, Narishige)に,ディッシュ底面との角度を 40°としてマイクロニードルを固定
した.観察対象とする細胞付近で,ニードル先端をディッシュ底面から 2µm の高さで静止させ,その状
態から細胞体の中央付近まで水平移動させることによりニードルの直接押し込みを行った.培養した単
離骨細胞の細胞体は,接着しているディッシュ底面から約 5µm の高さを持っていることから,2µm の
ニードル先端高さで十分な押し込みを行うことができる.なお,本実験に用いたガラス製マイクロニー
ドルは,次のように作製した.まず,直径φ=1mm のガラス管をマイクロピペットプラー(MC-10, Narishige)を用いて加熱し,引き延ばした.この状態
のニードル先端は非常に先鋭であり,直接
押し込みを行う際に細胞膜を傷つける恐れ
があるため,マイクロフォージ(MF-830, Narishige)を用いて先端部を直径φ=約 2µmの滑らかな状態に加工した. 観察には,共焦点レーザー走査型蛍光顕
Osteocyte
図 2 細胞体への局所力学刺激の付与方法

微鏡を用い,対物レンズは 63 倍油浸レ
ンズを使用した.観察波長帯域は,緑
色(505-530nm, Band Pass)とした.また
動画の画像取得は 0.65sec 間隔で行い,
取得した蛍光画像は,8bit(256 階調)
の輝度画像として PC に記録した.
3. 結果および考察
3.1 単離骨細胞内のアクチンフィラ
メント構造の観察結果 共焦点レーザ
ー走査型蛍光顕微鏡による単離骨細胞
の蛍光観察画像を図 3 に示す.細胞体
が小さく(15~20µm 程度),多数の細い細胞突起の伸長・分岐が観察され,Dish 上で細胞突起同士の再
結合を行っているものも見られた.また,骨細胞では細胞体部分における明瞭なアクチンフィラメント
の形成は見られず,特に細胞突起部分や突起の分岐部分に局在していることがわかる.
一方,骨細胞の分化前の細胞である骨芽細胞においては,細胞全体にアクチンフィラメントが配向し
て分布しており,それによって細胞形状を伸張状態で維持していることが知られている[13].アクチン
フィラメントをはじめとする細胞骨格は,細胞の形態維持に主要な役割を果たしているとされるほか,
情報伝達機構としての機能を指摘されている.骨細胞の細胞突起に局在したアクチンフィラメント分布
は,骨細胞が硬い骨基質の中に細胞突起を伸ばし,細胞間ネットワークを構築するために適した構造で
あると同時に,骨細胞がネットワークを介した力学刺激情報の伝達機構として機能する可能性を示唆す
る構造であると言える.また,骨芽細胞のアクチンフィラメント構造から骨細胞におけるアクチンの局
在状態へと変化する過程には,骨芽細胞から骨細胞へ分化する際に骨組織の表層・類骨・石灰化骨内部
へと細胞の分布場所が変わることによる,周囲の力学環境の変化が影響していると推察される.
3.2 局所変形負荷に対する単離骨細胞の細胞応答観察結果 細胞体に対して局所変形負荷を与え,細胞
応答としての細胞内 Ca2+濃度の変化を 0.65sec ごとに取得した共焦点レーザー走査型蛍光顕微鏡による
観察画像を図 4 に示す.通常,細胞質は細胞内の Ca2+濃度が細胞外よりも低い状態に保たれているが,
Ca2+蛍光指示薬を導入した骨細胞は局所変形負荷を与える前から顕微鏡で照射する励起光を受けて蛍光
しており,一定のCa2+濃度を有していることがわかる.しかし,細胞体の中央付近へのマイクロニード
ル押し込みによる局所刺激負荷を試みたところ,細胞応答としてのCa2+濃度の変化は見られなかった. 骨細胞におけるカルシウム応答に関する報告は,Kamioka[7]らによる細胞外 Ca2+濃度の変化に対する
細胞内カルシウム応答の観察や,Miyauchi[8],Mikuni-Takagaki[14]らによる低張液下での引張試験による
細胞外Ca2+の流入の報告などがあり,骨細胞においても骨芽細胞と同様,細胞内外のストレスによりカ
ルシウム応答が発生することが報告されている.しかし,これらの報告においては,細胞全体に対して
一様な生化学刺激あるいは力学刺激を負荷する方法を取っており.刺激負荷の部位とカルシウム応答の
発生については不明瞭なままであった.本実験における,骨細胞の細胞体に対する局所的な力学刺激に
対し細胞応答としてのCa2+の濃度変化が見られなかったという結果は,骨細胞が細胞体への局所的な刺
激に対する応答特性を有していないことを示唆している. 同様の局所変形負荷実験を Ca2+蛍光指示薬を導入した骨芽細胞に対して行った場合の観察画像を図 5
に示す.マイクロニードルを用いて骨芽細胞の細胞体に局所変形負荷を与えると,顕著な輝度上昇が見
られ,細胞応答として細胞内Ca2+濃度が上昇していることがわかる.以上のことより,骨細胞は,骨芽
細胞から分化する際に,力学刺激に対する応答特性を適切に変化させていると考えられる.
3.3 アクチンフィラメント構造と細胞応答特性の相関 骨細胞においては,明瞭なアクチンフィラメン
トの形成が見られなかった細胞体では,局所力学刺激に対するカルシウム応答が見られなかった.一方,
アクチンフィラメントが細胞全体に配向して分布している骨芽細胞においては,細胞体部分で明瞭なカ
ルシウム応答が観察されており,アクチンフィラメント分布の有無とカルシウム応答の有無が対応して
10µm10µm 10µm10µm
細胞突起 細胞突起の結合細胞体
アクチンフィラメント
図 3 単離骨細胞内のアクチンフィラメント構造
第4章 研究成果報告

いることがわかる.細胞内において細胞骨格を形成するアクチンフィラメントは,細胞形状を維持する
働きに加え,力学刺激の伝達経路としての働きを担っていると言われている[15].本実験において得ら
れた骨細胞の応答特性は,骨芽細胞が骨基質中に埋没し骨細胞へと分化する際に,細胞のおかれる力学
環境が変化することにともない,アクチンフィラメントがその環境下で細胞形状および細胞間ネットワ
ークを構築・維持するために適した分布をなすことによって獲得されたものであることが推測される.
4. おわりに
本研究では,骨細胞が形成する細胞間ネットワークが力学刺激情報の伝達回路として機能するメカニ
ズムを検討するため,まず,ネットワークを形成する単一の骨細胞の応答特性に着目した.細胞体への
局所刺激に対する情報伝達因子としての細胞内Ca2+の濃度変化について in vitro 観察を行い,力学刺激の
情報伝達に重要な役割を果たすとされるアクチンフィラメントの分布との相関について考察した.その
結果,骨細胞が細胞間ネットワークにおける力学刺激の情報伝達に適したアクチンフィラメント分布を
有していること,骨細胞は突起以外の細胞体部分への局所的な刺激に対する応答特性を有していないこ
とが示唆された.また,骨細胞の応答特性は骨芽細胞からの分化する際,細胞のおかれる力学環境の変
化を経て獲得されたものである可能性が示唆された.
今後は,骨細胞の細胞突起への局所刺激による応答特性を調べることで,骨細胞単体の詳細な力学刺
激感知メカニズムの素過程について明らかにする.また,骨細胞ネットワークに対しても同様の検討を
加えることで,骨細胞の複雑な力学的刺激感知・情報伝達メカニズムを明らかにする予定である.
図 4 単離骨細胞細胞体への局所力学刺激にともなう細胞内Ca2+濃度変化の in vitro 観察

参考文献
[1] Cowin, S. C., Moss-Salentijn, L. and Moss, M. L., Candidates for the mechanosensory system in bone, Journal of Biomechanical Engineering, 113-2, (1991), 191-197.
[2] Weinbaum, S, Cowin, S. C and Zeng, Y, A model for the excitation of osteocytes by mechanical loading-induced bone fluid shear stresses, Journal of Biomechanics, 27-3, (1994), 339-360.
[3] Duncan, R. L and Turner, C. H., Mechanotransduction and the functional response of bone to mechanical strain, Calcified Tissue International, 57-5, (1995), 344-358.
[4] Van der Plas, A. and Nijweide, P.J., Isolation and purification of osteocytes, Journal of Bone and Mineral Research, 7, (1992), 389-396.
[5] Kato, Y., Windle, J.J., Koop, B.A., Mundy, G.R. and Bonewald, L.F., Establishment of an osteocyte-like cell line, MLO-Y4, Journal of Bone and Mineral Research, 12, (1997), 2014-2023.
[6] Klein-Nulend, J., Van der Plas, A., Semeins, C.M., Ajubi, N.F., Frangos, J.A., Nijweide, P.J. and Burger, E.H., Sensitivity of osteocytes to biochemical stress in vitro, FASEB Journal, 9, (1995), 441-445.
[7] Kamioka, H., Miki, Y., Sumitani, K., Tagami, K., Terai, K., Hosoi, K. and Kawata, T., Extracellular calcium causes the release of calcium from intracellular stores in chick osteocytes, Biochemical and biophysical research communications, 212, (1995), 692-696.
[8] Miyauchi, A., Notoya, K., Mikuni-Takagaki, Y., Goto, M., Miki, Y., Takano-Yamamoto, T., Jinnai, K.,
図 5 骨芽細胞細胞体への局所力学刺激にともなう細胞内Ca2+濃度変化の in vitro 観察
第4章 研究成果報告

Takahashi, K., Kumagawa, M., Chihara, K. and Fujita, T., Parathyroid hormone-activated volume-sensitive calcium influx pathways in mechanically loaded osteocytes, Journal of Biological Chemistry, 275, (2000), 3335-3342.
[9] 藏田耕作,日垣秀彦,Vaananen, H.K.,骨細胞の三次元培養系の確立と局所的ダメージの影響,日本機
械学会バイオエンジニアリング部門第 14 回バイオフロンティア講演会講演論文集, 03-19, (2003), 15-16. [10] 藏田耕作,福永鷹信,日垣秀彦,三次元ゲル包理培養した骨細胞の伸張負荷に対する応答-骨髄細胞へ
の情報伝達メカニズム-,日本機械学会第 17 回バイオエンジニアリング講演会講演論文集, 04-48, (2005), 11-12.
[11] 青沼有紀,田中基嗣,安達泰治,矢野澄雄,北條正樹,単離骨細胞の力学刺激に対する応答観察,
日本機械学会平成 16 年度関西学生会学生員卒業研究発表講演会講演前刷集,(2005), 13-11. [12] Kamioka, H., Honjo, T. and Takano-Yamamoto, T., A three-dimensional distribution of osteocyte processes
revealed by the combination of confocal laser scanning microscopy and differential interference contrast microscopy, Bone, 28, (2001), 145-149.
[13] 林紘三郎,安達泰治,宮崎浩,生体細胞・組織のリモデリングのバイオメカニクス,(2003),コロナ社. [14] Mikuni-Takagaki, Y, Kakai, Y, Satoyoshi, M, Kawano, E, Suzuki, Y, Kawase, T and Saito, S, Matrix
mineralization and the differentiation of osteocyte-like cells in culture, Journal of Bone and Mineral Research, 10-2, (1995), 231-242.
[15] Adachi, T, Sato, K and Tomita, Y, Directional dependence of osteoblastic calcium response to mechanical stimuli, Biomechanics and Modeling in Mechanobiology, 2-2, (2003), 73-82.

骨の再生/機能的適応の複雑系モデルと
マルチスケールバイオメカニクス
工学研究科機械工学専攻 安達 泰治
Abstract: In adaptive bone remodeling/regeneration process, one important question is how mechanical stimulus at the cellular level is integrated into the tissue level phenomenon through the complex bone hierarchical systems in order to construct trabecular structure that meets with their functional demands. This study mainly focused on the osteocyte network systems embedded in bone matrix; known as a candidate system of the mechanosensory mechanism. From the multi-scale biomechanics viewpoint, we proposed a mathematical model of adaptive bone remodeling considering this complex sensory network systems, and conducted computational simulation using a voxel finite element method. Through a case study of remodeling for a simple bone unit under compressive loading, basic features of the proposed model to express the trabecular surface-remodeling phenomenon were demonstrated. Key words: Functional adaptation, Bone remodeling, Living tissue, Complex systems, Multi-scale biomechanics
1. はじめに
骨は,力学的環境の変化に対する適応現象であるリモデリングにより,絶えず自らの構造を機能的に変化さ
せている.この骨リモデリングは,骨組織に存在する各種細胞レベルで生じる複雑な生化学的反応過程の結
果であるが,様々な過程において,力学的な因子の関与が鍵となっている.このような微視的な細胞活動や巨
視的な組織構造の変化と力学因子とを関連付けるシステムの一つとして,骨基質の内部および表面に存在す
る各種細胞が形成する細胞間ネットワークが挙げられる[1].骨基質内部では,力学的刺激に対するセンサー
として働く骨細胞群が,ギャップ結合によりネットワークを形成している[2].このネットワークにより,感知された
力学的刺激情報が細胞間で伝達され,これに応じて,骨表面に存在する骨芽細胞および破骨細胞の代謝活
動に影響を与え,結果として,骨の適応的な構造変化がもたらされる.本研究では,この複雑なシステムからな
る機能的適応現象を数理モデル化し,巨視的な構造変化と微視的な細胞活動との力学的階層間を貫く新たな
理論的枠組みの構築を目指している.また,計算バイオメカニクス的手法を用いて,細胞間ネットワークの活動
と骨リモデリング現象との力学的関連性の解明を目指している.本報では,まず,骨細胞による力学的刺激の
感知,情報伝達,および骨芽細胞・破骨細胞による骨形成・骨吸収を数理モデル化する[3, 4].次に,海綿骨の
微視的構造である骨梁を対象として,Voxel 有限要素解析による骨リモデリングシミュレーション手法[5-9]を行
いて,骨梁の形態変化について検討する.
2. 骨梁リモデリングの数理モデル
骨リモデリングの本質的なメカニズムは,骨
組織に存在する各種細胞レベルで生じる複
雑な生化学的反応過程である[10].このよう
な微視的な細胞活動と巨視的な組織構造の
変化とを関連付けるシステムは,骨基質の内
部および表面に存在する各種細胞が形成す
る細胞間ネットワークである[1].骨基質内部
では,力学的刺激に対するセンサーとして働
く骨細胞群が,ギャップ結合により,Fig.1 に
示すような複雑なネットワークを形成している
[2].このネットワークにより,力学的刺激の情報が細胞間で伝達され,これに応じて,骨表面に存在する骨芽細
胞および破骨細胞が骨構造の変化をもたらす.
Fig. 1: Schematic drawing of bone intercellular network.
第4章 研究成果報告

骨基質中において,骨細胞は骨小腔と呼ばれる空間内に存在し,数多くの細長い細胞突起を骨細管中に
伸ばしている.また,骨細胞の細胞体と骨小腔との間隙,および細胞突起と骨細管との間隙は,間質液により
満たされている.このような骨梁内部の微視構造の異方性に起因して,骨梁の力学特性は,巨視的には,異方
性を有する.一方,骨基質の変形に伴う間質液の流れに着目すると,流れの方向性や大きさは,骨細管の配
向性や形状に強く依存すると考えられる.したがって,骨梁に対する力学的負荷に伴い間質液に圧力勾配が
生じ,骨細管内で間質液の流れが発生する一連のメカニクス[11-13]に対して,骨基質内部の複雑な微視構造
が及ぼす影響は大きく,これを考慮した実験的および理論的検討が重要であるといえる.ここでは,まず,骨細
胞によるメカノセンシングを考慮した骨梁リモデリングシミュレーションを通じて,本質的なメカニズムを抽出す
るため,いくつかの仮定をおきながら,単純化された数理モデルを構築する. 2.1 骨細胞による力学刺激の感知とその骨梁表面への伝達 まず,骨細胞が感知する力学刺激量を定義す
る.骨細胞が骨細管中に伸ばす細胞突起構造は,本来異方性を有するが,ここでは,Fig.2(a)に示すように,等
方的に突起が伸びているものと仮定する.また,Fig.2(b)に示すように,細胞突起が存在する領域を半径 lS の
球で表し,この領域を骨細胞の力学刺激感知領域とする.なお,骨細胞の細胞体は点で表現され,刺激感知
領域を表す球の中心に位置すると仮定する.
Fig. 2: Modeling of mechanosensing by osteocytes in trabeculae.
骨細胞は,間質液の流れに伴って生じる細胞突起表面に作用するせん断応力に対して,敏感に応答を示
すことが知られている.そこで,刺激感知領域内で骨細胞が感知する力学量として,せん断流と直接関連する
間質液の流れを駆動する圧力勾配を用いることとする.すなわち,Fig.2(c)に示すように,骨梁内部の任意の点
rx における圧力勾配の大きさを ( )rP∇ x ,点 bx に位置する骨細胞を i と表し,点 rx と点 bx の距離
r bl = −x x に応じた重みを考え,感知する力学刺激量 ( )i bS x を
( ) ( ) ( )i b S rS w l P dΩ
Ω= ∇∫x x (1)
と仮定する.ここで,Ω は全骨梁領域を表し, ( )Sw l は,
l に関する重み関数として,刺激感知領域内( Sl l< )でのみ値をもつものとし,次式を用いる.
(0 )1( )
( )0S
SS
l lw l
l l≤ <⎧
= ⎨ ≤⎩ (2)
骨梁を等方均質体として取り扱うため,間質液の圧力
( )rP x は,均質体としての圧力で代替され,骨梁内部の
任意の点における応力 ( )ij rσ x の静水圧成分により,
( ) ( ) / 3r kk rP σ= −x x (3)
のように表現される.ただし,例えば歩行などによる骨梁
Fig. 3: Modeling of intercellular communication

の力学状態変動が生じる時間スケールに比べて十分長い時間スケールを考え,荷重変動の繰り返しの結果と
して生じる時間平均的な力学状態に着目する. 次に,細胞間ネットワークを介して,骨梁表面に存在する細胞に骨細胞からの力学情報が伝達される過程を
モデル化する(Fig.3).細胞間ネットワークを介したコミュニケーション能力は,情報の伝達距離に応じて低下し,
伝達が不可能となる限界距離が存在すると考える.すなわち,骨梁表面において骨の形成・吸収を担う細胞は,
自らを中心として半径 Tl の球で表される伝達領域内に存在する骨細胞から情報を受け取ると仮定する.そこで,
式(1)中の力学刺激量 ( )i bS x を用いて,骨梁表面上の点 cx における力学情報量 ( )cT x を
( ) ( ) ( )ocN
c T i bi
T w l S= ∑x x (4)
のように定義する.ここで, ocN は,全骨梁領域に存在する骨細胞の個数を, ( )Tw l は,伝達距離
c bl = −x x に応じて単調減少する重み関数を表す.このとき,重み関数 ( )( 0)Tw l ≥ は,細胞間情報伝
達の局所性から Tl l< でのみ値をもつとする.また,式(4)で得られる力学情報量 ( )cT x は,骨梁表面に
存在する細胞の活性度を示すスカラ値関数であり,ここでは常に正定値となる. 2.2 力学刺激情報に応じた骨梁表面移動 骨のリモデリングの自己調節機構は,生理的な範囲内の力学刺
激に対して,刺激量が増大すると骨組織は成長し,刺激量が減少すると骨組織は吸収すると定性的に特徴付
けられる.そこで,骨梁表面における力学情報量 T(x) をリモデリングの駆動力とし,この値が大きければ骨形
成,および小さければ骨吸収が生じると考える.すなわち,骨梁表面移動速度 ( )M& x とリモデリング駆動力
T(x) との関係を,関数 F を用いて
0
0
(0 )0 :Formation( ) ( ( ))
( )0 :ResorptionT T
M F TT T
≤ <<⎧= ⎨ <>⎩
& x x (5)
と仮定することにより,リモデリングによる骨梁表面移動を記述する.このとき, 0T T= においてリモデリング速
度が 0M =& となるリモデリング平衡点が存在し,その T の値が幅を持った不感帯を考慮するのが一般的
である.そこで,リモデリング平衡の近傍における擬似的な不感帯の閾値として, uT および lT を導入する. 骨梁表面応力一様化則[5, 6]におけるモデルパラメータは,応力の感知半径 Ll ,および不感帯幅
u lΓ Γ Γ= − の 2 種類であった.一方,本報で構築した数理モデルには,4 種類のモデルパラメータが導
入されている.1 つ目の骨細胞による力学刺激の感知半径 Sl は,1 個の骨細胞から伸びる細胞突起の存在
領域を表し,骨細胞の密度と 1 対 1 の対応関係にある.2 つ目のモデルパラメータは,骨細胞から骨梁表面上
の細胞への力学情報の伝達半径 Tl である.3 つ目のパラメータは,リモデリング平衡点 0T である.4 つ目
のモデルパラメータは,擬似的な不感帯の幅 u lT T− である.これら 4 つのパラメータは,実験で得られる骨
梁構造の変化および力学刺激に対する細胞の反応と,シミュレーションとを比較することにより,決定される.
3. 骨細胞ネットワークを考慮した骨梁表面リモデリングシミュレーション
3.1 シミュレーション手法 構築した数理モデルの基本的な特性について検討するため,骨梁レベルにおけ
る力学状態の詳細な評価,および,リモデリングによる骨梁表面移動を表現する手法として,Voxel 有限要素法
を用いた計算機シミュレーション手法[6]を適用する.ここで構築するシミュレーションモデルにおいては,骨基
質内部に存在する骨細胞,細胞突起,骨小腔,および骨細管などの微視構造は,直接的には反映されない.
したがって,解析領域を分割するVoxel要素の種類は,骨梁とその空隙部を満たす骨髄の2種類に限定される.
本報では,骨梁および骨髄を等方線形弾性体と仮定し,骨梁の材料定数は,ヤング率 Et = 20GPa,ポアソン
比νt = 0.30,骨髄の材料定数は,ヤング率 Em = 20MPa,ポアソン比νm = 0.49 とする.
リモデリングによる骨梁形態の変化を,以下の手順の繰り返しにより表現する. (1)骨梁の初期形態を離散化し,各要素の材料定数を設定し,骨細胞要素をランダムに配置する. (2)境界条件を与え,EBE/PCG 法を用いた有限要素解析を行い,各要素の応力テンソル ijσ を求める. (3)各骨細胞要素に対する力学刺激量 Si,および,各骨梁表面要素に対する力学情報量 )( cxT を算出する.
第4章 研究成果報告

(4) リモデリング駆動力 )( cxT ,およびそれに応じた確率から,表面移動速度 M& を決定し,要素の付加・除
去により骨梁表面移動を行う.ただし,新たに付加された骨梁要素は,骨細胞の密度 ocρ から決定され
る確率に従い,骨細胞要素としてマーキングする. (5) リモデリングによる形態変化が得られない場合,あるいは同様の形態変化を繰り返す場合は,リモデリン
グ平衡に達したと判断して計算を終了し,平衡でなければ手順(2)に戻り計算を繰り返す. 以下では,上記(2)~(5)の一連の手順を 1 step とし,その繰り返し回数を step 数と呼ぶことにする. 3.2 単体骨梁モデル 骨梁リモデリングの基本パターンに習い,Fig.5に示すように,Z, Y, X字型骨梁(Model Z, Y, X)3 通りについて,X2 方向に圧縮荷重を受ける二
次元骨梁モデルを作成した.解析領域全体の大きさは,
1 2 1.44mm 1.36mma a× = × であり,領域を分割する
立方体 Voxel 要素の寸法を一辺 8 μm とした.このとき,
全解析領域の要素分割数は, 170180 × =30,600 個,初期
状態における骨梁部の要素数は,12,994 個(Model Z),
4,874 個(Model Y),および 16,800 個(Model X)とした. 境界条件は,Fig.5(a)に示すように,X2 =1.36 mm の上
端面にX2方向の一様圧縮変位U2を与え,下端面の面外
変位を拘束した.このとき,上端面における X2 軸方向の
全 荷 重 F2 を 考 え , 同 軸 方 向 の 見 か け の 応 力
2 2 1/U aσ δ= が 1.0MPa− となるよう,一様圧縮変位 U2 を各ステップで調整した.ここで, 2 2 2/U aε = を X2
軸方向の見かけのひずみと定義する. 数理モデルに含まれるモデルパラメータは,刺激感知半径を lS = 35 μm,情報伝達半径を lT = 150 μm,お
よび,リモデリング平衡点を T0 = 2500 3δ× ,不感帯の形成閾値をそれぞれ Tu = 3000 3δ× ,吸収閾値を Tl = 2000 3δ× とした.また,骨細胞の密度を OCρ = 1cell/3000μm2 とし,骨梁内部に骨細胞をランダムに配置する際
に参照した.これらのパラメータは,シミュレーションと実験とを定量的に比較することで決定される. 3.3 単軸応力下の骨梁形態変化 骨梁リモデリングシミュレーションにより得られた骨梁の形態変化につい
て述べる.リモデリング過程における代表的な骨梁構造として,Model Z,Model Y,およびModel Xについて,
それぞれ 20th step,50th step,および 100th step における構造を Fig.6 に示す. Model Z の場合,初期形態において,Z 字の斜向部で応力が高くなる.そのため,斜向部の骨梁の表面近
傍では圧力勾配が大きくなり,リモデリング初期において斜骨梁は全体的に太さを増した.この段階での骨形
成は,強い曲げを受けて大きな圧力勾配が生じる Z 字の鋭角部で特に顕著であったため,20th step において,
Fig.6(b)上段の形態へと変化した.その後,斜向部の両端近くの圧縮側では依然として圧力勾配が大きいため
に,内側への表面移動が進行した.一方,引張側では応力低下に伴い圧力勾配が小さくなり,この部位の表
面移動は負に転じ,50th step において,Fig.6(c)上段の形態へと変化した.この後,さらに骨梁は負荷方向へと
回転し, 終的には,100th step において,Fig.6(d)上段に示すように,荷重方向に 1 本の骨梁が形成された. Model Y の場合,リモデリングの初期段階において,表面移動により三角形の骨髄部が円形に近づき,Y 字
型下側の垂直部の中央辺りでは骨梁が細くなった.その結果,20th step において,Fig.6(b)中段に示すように,
垂直部の細い骨梁領域での応力上昇がこの部位の圧力勾配を増大させ,正の表面移動に転じることにより,
50th step の形態へと変化した.この後,円形の骨髄部分と接する骨梁表面では骨形成が進行し, 終的には,
Fig.6(d)上段に示すように,Model Z と同様の 1 本の骨梁配向形態が得られた. Model Xの場合,骨梁表面移動により,20th stepでは,Fig.6(b)下段に示すように,H字型に近い形態への変
化が生じた.H 字型中央の水平部は,圧力勾配の高い部位から離れており,伝達される力学情報量が小さくな
る.このため,50th step において,Fig.6(c)下段に示すように,H 字型中央の水平部の骨梁が完全に吸収され,
連結した骨髄部が骨梁に囲まれる形態となった.さらに,100th step において,Fig.6(d)下段に示すように,
Model Z および Model Y の場合とは異なり,荷重方向に平行な 2 本の骨梁となった.
Fig. 5: Single trabecular models under compressive loading (voxel finite elements).

Fig. 6: Change in trabecular shape by surface remodeling under compressive loading.
以上のように,3 つの骨梁モデル全てにおいて,リモデリングにより骨梁の配向が圧縮負荷方向へ変化する
結果が得られた.これは,骨梁表面の応力一様化則を用いたリモデリングシミュレーションと同じ傾向を示すも
のである.しかしながら,Fig.6(d)に示すように, 終的に得られた骨梁形態の表面に着目すると,表面応力一
様化則に基づくシミュレーション[5]では見られなかった特徴的な凹凸が形成されていることがわかる.本シミュ
レーションにおいて,単一および少数本の骨梁が,荷重方向に配向した直方体状の形態が得られた場合,骨
梁表面に形成される凹凸は,リモデリング平衡状態を維持するのに重要な役割を果たす.すなわち,このよう
な凹凸により圧力勾配が生じ,骨の吸収と形成が平衡するのに必要なリモデリング駆動力 T がもたらされる. 3.4 骨梁レベルの応力一様化 骨梁表面の応力一様化則を用いたリモデリングシミュレーション[5, 6]により,実
際の海綿骨構造に類似した骨梁パターンが得られることが示されている.したがって,局所的な応力一様化は,
骨リモデリングの重要な一つの指針となり得ると考えられる.しかしながら,この数理モデルは,現象論的な仮
説[14]に基づくものであり,骨梁レベルの応力一様化をもたらすマイクロレベルのメカニズムとの関連付けは行
われていない.そこで,本節では,骨細胞によるメカノセンシングを考慮した本リモデリング則と,骨梁レベルの
応力一様化との関連性について検討する. 第 3.3 節において得られた Model Z のシミュレーショ
ン結果に基づき,初期形態および 100th step において
相当応力 σ を有する骨梁体積 ( )Ω σ のヒストグラムを
Fig.7 に示す.ただし,同図中において,骨梁体積
( )Ω σ を解析領域内の全骨梁体積 AllΩ により規格化
している.同図に示すように,モデルの初期状態にお
いて,荷重方向に対して垂直な骨梁が存在するために,
低応力領域が大きいことがわかる.また,骨梁が荷重
方向に対して斜向していることに起因して,幅広く応力
値が分布している.このとき,骨梁が有する相当応力値
の分散は,初期において 41.6MPa であったのに対して,
リモデリングにより骨梁配向が荷重方向に変化すること
で,100th step においては,応力値の分布幅が狭まり,
その分散が 0.86MPa となった.この結果,ヒストグラム
の形状が,単峰を有する形状に変化した.同様に,Model YおよびXおいても,応力の分散が,それぞれ2.58から0.56,および,1.71 から1.02 に減少した.このように,骨梁リモデリングの数理モデルにより,応力の一様化
の傾向が達成されていることがわかる.
Fig. 7: Histogram of equivalent stress evaluated
for single trabecular remodeling (Model Z).
第4章 研究成果報告

4. おわりに
細胞突起に作用するせん断応力を骨細胞が感知する力学刺激因子として仮定し,この刺激と直接関連する
物理量として,骨基質内に生じる圧力勾配を考慮した骨梁リモデリング則について検討した.また,この数理モ
デルと Voxel 有限要素解析手法を組み合わせ,圧縮荷重を受ける単純骨梁のリモデリングシミュレーションを
行うことにより,骨梁レベルにおける応力一様化の傾向が示されたことから,骨細胞間ネットワークレベルのメカ
ニクスが,現象論的な仮説としての表面応力一様化則を説明可能なシステムであることが示された.これは,骨
細胞ネットワークレベルにおけるメカニクスと骨梁表面応力一様化則との関連性を示唆するものであり,細胞レ
ベルの刺激感知から巨視的な海綿骨構造の変化に至る骨のマルチスケールメカニクスを確立する枠組みの
一部としての本モデルの有用性を示すものである. 骨の基質に埋め込まれたままネットワークを形成する骨細胞の機能に関しては,その多くが未だ解明されて
おらず,骨形成を担う骨芽細胞,および骨吸収を担う破骨細胞との活動の連鎖機構にも不明な点が多い.した
がって,in vitro および in vivo におけるさらなる骨細胞に関する実験的検討が望まれる.
参考文献
[1] Cowin, S. C., Moss-Salentijn, L., and Moss, M. L., Candidates for the mechanosensory system in bone, J. Biomech. Eng., 113-2, (1991), 191-197.
[2] Donahue, H. J., McLeod, K. J., Rubin, C. T., Andersen, J., Grine, E. A., Hertzberg, E. L., and Brink, P. R., Cell-to-cell communication in osteoblastic networks: Cell line-dependent hormonal regulation of gap junction function, J. Bone & Min. Res., 10-6, (1995), 881-889.
[3] 尾迫佑樹,安達泰治,田中基嗣,北條正樹, 骨細胞間のメカノセンサーネットワークの数理モデル化,日本機械学会第 17 回計算力学講演会講演論文集,04-40, (2004), 185-186.
[4] 尾迫佑樹,安達泰治,田中基嗣,北條正樹, 骨細胞によるメカノセンシングを考慮したリモデリングシミュレーション, 日本機械学会第17回バイオエンジニアリング講演会, 04-48, (2005), 387-388.
[5] Adachi, T., Tomita, Y., Sakaue, H., and Tanaka, M., Simulation of trabecular surface remodeling based on local stress nonuniformity, JSME Int. J., 40C-4, (1997), 782-792.
[6] Adachi, T., Tsubota, K., Tomita, Y., and Hollister, S. J., Trabecular surface remodeling simulation for cancellous bone using microstructural voxel finite element models, J. Biomech. Eng., 123-5, (2001), 403-409.
[7] Tsubota, K., Adachi, T., and Tomita, Y., Functional adaptation of cancellous bone in human proximal femur predicted by trabecular surface remodeling simulation toward uniform stress state, J. Biomech., 35-12, (2002), 1541-1551.
[8] Tsubota, K., Adachi, T., and Tomita, Y., Effects of a fixation screw on trabecular structural changes in a vertebral body predicted by remodeling simulation of trabecular surface remodeling, Annals Biomed, Eng., 31-6, (2003), 733-740.
[9] Tsubota, K. and Adachi, T., Changes in the fabric and compliance tensors of cancellous bone due to trabecular surface remodeling, Predicted by a digital image-based model, Comp. Meth. Biomech. & Biomed. Eng., 7-4, (2004), 187-192.
[10] Parfitt, A. M., Osteonal and hemi-osteonal remodeling: The spatial and temporal framework for signal traffic in adult human bone, J. Cell. Biochem., 55, (1994), 273-286.
[11] Weinbaum, S., Cowin, S. C. and Zeng, Y., A model for the excitation of osteocytes by mechanical loading-induced bone fluid shear stresses, J. Biomech., 27-3, (1994), 339-360.
[12] Cowin, S. C., and Weinbaum, S., Strain amplification in the bone mechanosensory system, Am. J. Med. Sci., 316-3, (1998), 184-188.
[13] You, L., Cowin, S. C., Schaffler, M. B., Weinbaum, S., A model for strain amplification in the actin cytoskeleton of osteocytes due to fluid drag on pericellular matrix, J. Biomech., 34-11, (2001), 1375-1386.
[14] Adachi, T., Tanaka, M., and Tomita, Y., Uniform stress state in bone structure with residual stress, J. Biomech. Eng., 120-3, (1998), 342-347.

複雑な構造を持つ材料における非線形波動の解析
工学研究科航空宇宙工学専攻 土井祐介
Abstract: Thermal relaxation process in Fermi-Pasta-Ulam (FPU) type lattice systems is investigated nu-merically. Energy localization due to nonlinear effect of the system is observed in the situation which is farfrom thermal equilibrium state. Moreover, it is shown that characteristics of the localization and delocal-ization process depend on the property of the system, such as shape of interacting potential, temperature,etc. This localization process can be one of the possibly processes in which intrinsic localized modes (ILM)could play some roles.Key words: Nonlinear lattice system, Intrinsic localized mode, Discrete breather
1. はじめに
非線形格子モデル固有の現象である非線形局在モード (Intrinsic Localized Mode, ILM)/離散ブリーザー (Discrete Breather, DB)は理学・工学の分野で幅広い応用が期待されている [1].特に固体材料において,原子・分子間の相互作用ポテンシャルの非線形性が大きくなっている場合にはILM が出現する可能性がある.このような状況としては,高温 (熱振動が大きくなることによって原子間の距離が縮まる),圧縮応力負荷時 (原子間距離が圧縮される)が考えられる.格子スケールでのエネルギー局在である ILM は,結晶中の微細構造と複雑に相互作用する等,材料の微視的現象において何らかの役割を果たしている可能性がある.しかし,ILM の励起のメカニズムについては非線形動力学の立場からの解析がなされているものの,より物理的な立場からの解析はなされてきていない.本研究では,ILM の励起のメカニズムについて,エネルギーの緩和過程に着目して解析を行う.
2. 数値シミュレーション
-1 -0.5 0 0.5 1
quarticcubic + quartic
図 1:ポテンシャル形状の対称性
2.1 モデル ILM の解析においては 1次元 Fermi-Pasta-Ulamβ (FPU-β)格子モデルが用いられる.FPU-βモデルは,系のハミルトニアンが
H =∑
i
[12u2
i +12
(ui+1 − ui)2 +
β
4(ui+1 − ui)
4], (1)
で与えられる.ここで uiは i番目の格子点の平衡点からの変位,βは非線形パラメータである.FPU-βモデルは変位の偶数次の項だけで構成される対称ポテンシャルであり,圧縮,引張りに対して同じ大きさの力が作用する.一方,現実の原子間相互作用ポテンシャルは,圧縮,引張りに対して力の作用が異なる非対称ポテンシャルである (図 1).また,FPU-βモデルは 1次元モデルであるが,現実の結晶は 2次元,3次元構造であり,モデル化にあたってはその効果を考える必要もある.そこで (1)に非対称性として奇数次の相互作用ポテンシャル項,2次元・3次元効果として on-siteポテンシャルを加えた,
H =∑
i
[12u2
i + V1 (ui+1, ui) + V2 (ui)], (2)
V1 (ui+1, ui) =12
(ui+1 − ui)2 +
α
3(ui+1 − ui)
3 +β
4(ui+1 − ui)
4 , (3)
V2 (ui) =a
2u2
i , (4)
第4章 研究成果報告

を用いて解析を行うことにする.ここで V1は隣接格子点の相互作用ポテンシャル,V2は on-siteポテンシャルである.
2.2 初期条件 初期条件として,以下の 3つを取り扱う.
熱平衡状態 系の各フォノンモードに均等にエネルギーを配分する.その結果,各格子点の初期変位,初期速度は
ui(0) =∑N/2−1
k=−N/2 Ak cos (kn + φk)
ui(0) = −∑N/2−1k=−N/2 Akωk sin (kn + φk)
(5)
と与えられる.ここで固有角振動数 ωkおよび振幅Akは
ω2 = a2 + 4 sin2(
k
2
), (6)
Ak =1N
√2T
N. (7)
で与えられる.φkは各モードで [0, 2π]の間でランダムに決定される.
ランダム速度 全エネルギーが運動エネルギーとして存在している.各格子点の速度は一様乱数 ξ
で与えられる.C1は系の温度によって決まるスケーリングパラメータである.
ui(0) = 0, ui(0) = C1ξ (8)
ランダム変位 全エネルギーがポテンシャルエネルギーとして偏在している.各格子点の変位は一様乱数 ξで与えられる.C2は系の温度によって決まるスケーリングパラメータである.
ui(0) = C2ξ, ui(0) = 0 (9)
2.3 パラメータ 解析パラメータとして,各粒子の全エネルギーの局在パラメータ,高エネルギー粒子の分布を取り上げる.局在パラメータは
L =∑
i e2i
(∑
i ei)2(10)
で与えられ,局在が大きいほど大きな値をとる.また,高エネルギー粒子として系の平均エネルギーの 2倍から 3.5倍までの大きさのエネルギーの粒子の分布を調べる.
3. 計算結果
3.1 初期条件の影響 図 2に緩和過程の初期条件への依存性を示す.熱平衡状態の場合,非線形性の影響は現れず,それぞれのパラメータは時間的に変化をしない.したがって初期状態は系の熱平衡状態であるといえ,緩和過程は観測されない.次にランダム速度の場合は熱平衡状態の場合とほぼ同様の振る舞いを示す.このことからエネルギーが運動エネルギーのみに集中している状態から熱平衡状態への緩和はすぐに行われると考えられる.一方,ランダム変位の場合は,最終的には熱平衡状態に達するが,その緩和過程は他の 2つの場合と大きく異なっている.局在パラメータ及び高エネルギー粒子の分布から,系のエネルギーは一度局在してから脱局在して熱平衡状態に達していることが分かる.このような振る舞いは線形系においては観測されないことから,緩和過程において系の非線形性によって ILM が励起されることを示している.また,ランダム速度とランダム変位の緩和過程が大きく異なっていることから,ランダム変位の方が熱平衡状態からより大きくかけ離れていることが分かる.

0.00042
0.00044
0.00046
0.00048
0.0005
0.00052
0.00054
0.00056
0.00058
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Loca
liza
tion P
aram
eter
Time(×106)
Thermal EquiliburiumRandom Velocity
Random Displacement
(a)
0.01
0.012
0.014
0.016
0.018
0.02
0.022
0.024
0.026
0.028
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Fra
ctio
n o
f h
igh
en
erg
y p
arti
cles
Time(×106)
Thermal EquiliburiumRandom Velocity
Random Displacement
(b)
図 2:初期条件の違いによる緩和過程の変化:(a)局在パラメータ L, (b)高エネルギー粒子の割合
3.2 温度依存性 図 3に初期条件としてランダム変位を採用し,系の初期温度をさまざまに変化させた場合の緩和の様子を示す.これらの結果から初期状態が高温のほうが緩和過程におけるエネルギーの局在度が大きくなることが分かる.これは高温になるほど各粒子の変位が大きくなり,系の非線形効果が大きくなることから,ILM が励起されやすい状況になっているためである.一方,系が熱平衡状態に達するまでの緩和時間は初期状態が高温であるほど短くなる.これらの結果から,系がより高温であるほど多くのエネルギーが短時間で局在・脱局在し,最終的には平衡状態に達するということが分かる.
0
0.005
0.01
0.015
0.02
0.025
0.03
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Fra
ctio
n o
f hig
h e
ner
gy p
arti
cles
Time(× 106)
4T/25T/26T/27T/2
(a)
0
0.005
0.01
0.015
0.02
0.025
0.03
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Fra
ctio
n o
f hig
h e
ner
gy p
arti
cles
Time(× 106)
4T/25T/26T/27T/2
(b)
0
0.005
0.01
0.015
0.02
0.025
0.03
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Fra
ctio
n o
f h
igh
en
erg
y p
arti
cles
Time(× 106)
4T/25T/26T/27T/2
(c)
0
0.005
0.01
0.015
0.02
0.025
0.03
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Fra
ctio
n o
f hig
h e
ner
gy p
arti
cles
Time(× 106)
4T/25T/26T/27T/2
(d)
図 3:初期温度の違いによる緩和過程の変化:(a)T=0.204, (b)T=0.418, (c)T=0.641, (d)T=0.868
3.3 ポテンシャル依存性 最初にポテンシャルの対称性と緩和過程の関係について調べる.図 4(a)に非対称ポテンシャルのパラメータ αをさまざまに変えた場合の数値シミュレーション結果を示す.これから局在度の大きさは αには依存しないものの,αが大きくなるにつれて熱平衡状態に到達するのに必要な時間が短くなっているのが分かる.このことから FPUモデルにおけるポテンシャルの非対称性は ILM を緩和させる作用を持つと考えられる.次に図 4(b)に on-siteポテンシャルパラメータ aをさまざまに変えた場合の結果を示す.aが大
第4章 研究成果報告

きくなるにつれて緩和時間が長くなり,エネルギーが局在している時間が長くなっていることが分かる.
0.00042
0.00043
0.00044
0.00045
0.00046
0.00047
0.00048
0.00049
0.0005
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Loc
aliz
atio
n Pa
ram
eter
Time(×106)
α=0.02α=0.04α=0.06α=0.08α=0.10
(a)
0.00042
0.00044
0.00046
0.00048
0.0005
0.00052
0.00054
0.00056
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Lo
cali
zati
on
Par
amet
er
Time(×106)
a=0.1a=0.2a=0.3a=0.4a=0.5
(b)
図 4:ポテンシャル形状による緩和過程の変化:(a)非対称パラメータ α, (b)on-siteパラメータ a
4. 考察
今回の数値シミュレーションから系の非線形効果が大きな場合には非平衡状態からの緩和過程において ILM の励起状態を経て熱平衡状態に到達することが分かった.初期条件の異なるシミュレーション結果から,エネルギーの非平衡状態においてはポテンシャルエネルギーが大きな役割を果たすことが示された.このことは格子点の変位を変化させるとことによる生じる非平衡状態からの緩和過程において ILM が励起されうる可能性が高いことを示唆している.非線形局在の温度依存性については,より温度の高い非平衡状態において大きなエネルギー局
在が生じることが示された.温度が高いことは系の全エネルギーが大きくなり,そのエネルギーが局在するということを考慮すると妥当な結果である.一方で局在状態から平衡状態に達するまでの緩和時間も温度が高いほど短くなるという結果を得た.Cretegnyらによる FPU-β系での解析では相互作用によって成長した ILM が最終的に緩和し,その緩和時間は系のエネルギーに依存する [2].したがって,今回取り上げた系においても非線形効果によって急速に成長した ILM が崩壊し,熱平衡状態へと緩和していくものと考えられる.その一方で,背後に熱雑音が存在する系での ILM の振る舞いについては十分に解析されておらず.今後の課題である.また,相互ポテンシャルの対称性および on-siteポテンシャルの強さが局在状態からの緩和時間に影響を与えることが明らかになった.相互作用ポテンシャルの非対称性が大きくなると ILM の形状が左右非対称な形に変化することが報告されている.さらに on-siteポテンシャルの存在がこの非対称型 ILM を安定化させるという数値シミュレーション結果が報告されており,これらの結果は今回の結果と矛盾しない.しかしながらポテンシャル形状が ILM にあたえる影響については明らかになっておらず,十分な検討が必要である.
5. 終わりに
ILM の励起メカニズムを探るために非線形格子系での非平衡状態からの緩和現状を数値的に解析した.その結果,緩和過程において系の非線形効果によるエネルギー局在が発生し,その後,局在が崩れることによって熱平衡状態が実現されるというプロセスを観測した.さらに緩和時間,局在度と系の初期状態,物理パラメータとの関係を解析した.今後,さらに詳細な解析を進めるとともに,2次元系,3次元系でのエネルギー局在プロセスについても明らかにしていきたい.
参考文献
[1] S. Flach and C.W. Willis,Discrete breathers, Phys. Rep.,295, (1998), 181-264.
[2] T. Cretegny, T. Dauxois, S. Ruffo and A. Torcini,Localization and equipartition of energy inβ-FPU chain: Chaotic breathers, Physica D,121, (1998), 109-126.

Abstract: Deformation of solid materials is deeply related to collective motion of atoms. While the motion of each
atom is simply governed by Newtonian mechanics, collective motion of atoms is largely affected by slight
difference of conditions, such as structure, boundary conditions, loading conditions, and so on. This study is
focused on deformation mechanism of solid materials induced by atomic structure. We tackle this issue by means
of atomic simulations. First, ab initio tensile simulation of silicon thin film is carried out to investigate effect of
surface on ideal strength. Bond structure due to the existence of surfaces causes the reduction of the ideal strength.
Tensile simulation of copper nanoscale thin films using classical potential is performed to find that the ideal
strength is affected by the surface and tensile orientation and can be higher or lower than that of bulk. We also
performed tensile simulation of amorphous metal to reveal local deformation in the atomic scale, which is peculiar
to amorphous structure. Significance of studying local atomic structure as a key factor to affect the mechanical
properties is manifested.
Key words: Ideal strength, Unstable deformation, Atomic structure, Simulation
1.
2.
1
第4章 研究成果報告

x, y
2.2
-
3
3.
4 -
5
第4章 研究成果報告

1.0E-03
7.5E-04
5.0E-04
2.5E-04
6 -
7
8

4.
[1] K.Ohno, K.Esfarjani, Kawazoe,Y., Computational Materials Science, (1999), 77, Springer.
[2] Y.Umeno, T.Kitamura, Ab initio simulation on ideal shear strength of silicon, Mater. Sci. Eng. B, 88-1 (2002),
79-84.
[3] M.Born, K.Huang, Dynamical Theory of Crystal Lattices, (1954), Oxford UP.
[4] F.Milstein, Theoretical Strength of a Perfect Crystal, Phys. Rev. B, 3 (1971), 1130-1141.
[5] K.J.Van Vliet, J.Li, T.Zhu, S.Yip, Quantifying the early stages of plasticity through nanoscale experiments and
simulations, Phys. Rev. B, 67 (2003), 104105.
[6] T.Kitamura, Y.Umeno and A.Kushima, Ideal Strength of Nano-components, Mater. Sci. Forum, 482 (2005),
25-32.
[7] Y.Umeno and T.Kitamura, Criterion of Mechanical Instability in Inhomogeneous Atomic System, Mater. Sci.
Forum, 482 (2005), 127-130.
第4章 研究成果報告


電子波動関数の摂動論的アプローチによる
固体材料の振動特性解析
工学研究科機械物理工学専攻 中村 康一
Abstract: To predict the vibrational properties theoretically is useful for the design and control of novel materials. In this study, procedure to give phonon dispersion curves of based on the second derivatives of the Hartree-Fock total energy with respect to atomic displacements, the Hessian matrix elements, in periodic boundary system shall be presented from the wave functions of electrons with the LCAO (linear combination of atomic orbital) expansion. The analytical derivation of the Hessian matrix has been performed in terms of the coupled-perturbed Hartree-Fock algorithm, which is used in the field of quantum chemical calculations of molecules. For some periodic models of solid materials, we calculated the mass-weighted Hessian matrices including a phase factor, called the dynamical matrices, and phonon dispersion curves as eigenvalues of the dynamical matrices. We will apply this method to analyses of material dynamics such as reconstruction triggered by defects or impurities, phase transfer of crystal, and so on. Key words: Vibrational analysis, Wave functions, Perturbation theory, LCAO, Quantum chemical calculation
1. はじめに
固体材料の振動特性解析は、材料設計・制御や材料分光等さまざまな分野に応用が可能なきわめて基
礎的かつ重要なテーマとなっている。多くの固体結晶についてその振動特性の解析が実験的・理論的に
行われているが、実用において鍵となる不純物や格子欠陥の影響については理論的な解析は未発達であ
る。不純物や格子欠陥による対称性の破れが振動モードの導出を困難にするためであるが、その背景と
して任意の周期系材料モデルの振動モードを非経験的に導出するプログラムコードがあまり普及してい
ないことが挙げられる。平面波展開波動関数を用いた周期系モデルについては“ABINIT”というプログ
ラムパッケージ[1]により波動関数の摂動項が計算でき、これを用いた振動モード等の物性解析が可能で
はあるが、より高精度で物性評価を行うにはタイト・バインディング法により求めた原子軌道線形結合
(LCAO)展開した波動関数を用いることが有効となる。しかし、周期系において LCAO 展開波動関数を
利用して物性評価を行う環境は、まだ整備されていないのが現状である。本研究ではLCAO 展開波動関
数を用いて、周期境界条件を用いた第一原理電子状態計算の結果から電子波動関数の摂動項を容易に導
出する方法を議論し、任意の周期系材料モデルについて質量換算 Hessian 行列要素を計算するプログラ
ムコードを作成して、さまざまなモデルにおいて不純物や格子欠陥が基準振動モードの振動数、赤外・
ラマン活性強度等に与える影響を明らかにすることを目的とする。 平成 15 年度での本研究では、周期境界条件の下での原子核-電子相互作用系における全エネルギー
E({R})の核変位{R}に関する 2 階微分(Hessian 行列要素)を定式化し、LCAO 展開波動関数の微分を導
出して結晶系のΓ点における基準振動数と基準振動モードを求める応用計算を行った[2]。平成 16 年度は
これを拡張し、結晶系の任意の逆格子座標における基準振動数が得られるように位相因子を含んだ
E({R})の 2 階微分を計算して、フォノン分散曲線を第一原理的にシミュレートする手法を開発した。
2. ダイナミカル行列
周期境界条件の下でLCAO 展開を用いる場合、波数ベクトル k に対するm 番目のバンドの1電子波動
関数は、
∑ ∑ ⋅−−=µ
µµµ ϕψ Lk
Lkk LRrr i
mm ec )()( , (1)
第4章 研究成果報告

と書ける。ただしL は格子並進ベクトル、ϕµ(r – Rµ)は単位格子内の座標Rµに原子核がある原子µ の原
子軌道を表し、エネルギー固有値をεmkとする。式(1)の波動関数を用いると、Hartree-Fock 法による周期
系の全エネルギーは密度行列要素
∫ ∑∈
∗⋅=BZ
mmm
i ccedPocc
,, kkLkL k νµµν (2)
を用いて式(3)のように表せる。
∑ ∑∑∑∑∑ ⎟⎟⎠
⎞⎜⎜⎝
⎛++=
L M
LMN
N
NLLLnucHF )||(
21 vPPHPE λσµν
λσλσ
µνµν
µνµνµν . (3)
ただし、
rLRrRrL dHH )(ˆ)( core −−−= ∫ ∗ννµµµν ϕϕ ; (4)
∫∫ −−−−−−−−= ∗−∗2122
11211 )()()()()||( rrMRrNMRrLRrRrLMN ddr σσλλννµµ ϕϕϕϕλσµν
∫∫ −−−−−−−−− ∗−∗2122
11211 )()()()( rrLRrNMRrMRrRr ddr ννλλσσµµ ϕϕϕϕ (5)
であり( coreH は核ハミルトニアン)、 nucnuc Vv =∑L
は核間反発項である。このとき、位相因子 Lq⋅ie を用
いてK 質点系のダイナミカル行列D(q)の行列要素を
∑ ∑∑∑∑∑ ⎟⎟⎠
⎞⎜⎜⎝
⎛++
∂∂∂
= ⋅
L M
LMN
N
NLLLLqqD nuc
2
)||(21)}({ vPPHPei
jiij λσµν
ττ λσλσ
µνµν
µνµνµν (6)
(i,j = 1,2,…,3K; ,...,,,..., µµµµµµττ zMyMxMji = )
と定義する。核間反発項の微分の取り扱いは容易なので、式(6)の右辺の被微分式から核間反発項を除い
た式Eqについて考える。Eqの 1 階微分をとると
∑ ∑∑∑⎢⎢⎣
⎡
∂
∂+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
∂
∂+
∂
∂=
∂
∂ ⋅⋅
µνλσλσ
µν
µν
µνµνµν
µν λσµνLMN
LMNNL
Lq
L
LLL
LLqq )||(
21 P
zP
ez
HPH
zP
ez
E ii
⎥⎦
⎤∂
∂+
∂∂
+z
PPz
PPLMN
NLLMNN
L )||()||( λσµνλσµν λσµνλσ
µν (7)
となるが、波数ベクトル k + q に対する Fock 行列要素
∑ ∑∑+= ⋅++
L
LMN
MN
NLLqkqk })||({)(
, λσµνλσ
λσµνµν PHeF i (8)
で括り、Roothaan 方程式F(k + q)C(k + q) = S(k + q)C(k + q)ε(k + q)を用いた変換および重なり行列と波動
関数の係数行列との関係式C†(k + q)S(k + q)C(k + q) = 1 により、式(7)は
∫ ∑∑ ∑∑∑ ∂
∂−
∂∂
+∂
∂=
∂
∂ ++
⋅⋅
BZ
ii
zS
Wdz
PPez
HPe
zE
µν
µνµν
µνλσλσµν
µν
µνµν
λσµν qkqk
LMN
LMNNLLq
L
LLLqq k ,
,)||(
21 (9)
のように書き換えられる。ただし、 ∑∈
+∗
+++ =occ
,,,m
mmm ccW qkqkqkqk νµµν ε であり、重なり行列要素 qk +,µνS は
∑ ∫ −−−= ∗⋅++
L
Lqkqk rLRrRr deS i )()()(
, ννµµµν ϕϕ (10)
と定義される。Eqの 1 階微分についての一連の取り扱いは、位相因子を考慮しない場合とほとんど同じ
手続きとなり、式(9)のように大規模電子積分の解析的微分を計算すれば導出可能である。一方、2 階微

分は式(9)を用いて
∫ ∑∑ ∑∑∑ ′∂∂
∂−
′∂∂∂
+′∂∂
∂=
′∂∂
∂ ++
⋅⋅
BZ
ii
zzS
Wdzz
PPezz
HPe
zzE
µν
µνµν
µνλσλσµν
µν
µνµν
λσµν qkqk
LMN
LMNNLLq
L
LLLqq k ,
2
,
222 )||(21
∫ ∑∑ ∑∑∑ ∂
∂′∂
∂−
∂∂
′∂
∂+
∂
∂′∂
∂+ ++⋅⋅
BZ
ii
zS
zW
dz
Pz
Pe
zH
zP
eµν
µνµν
µνλσλσ
µν
µν
µνµν λσµν qkqk
LMN
LMNN
LLk
L
LLLk k ,,)||(
(11) としか表現されず、式(11)の右辺第 4 項から第 6 項(2 行目)において密度行列要素 L
µνP または qk +,µνW の
1 階微分が必要となる。これらの微分値は容易に解析的に得られず、どちらも周期系電子波動関数の係
数微分に帰結される。しかし、 LµνP は q に依存せず、また qk +,µνW は波数ベクトルが k + q である波動関
数の係数とエネルギー固有値で決定されるので、D(q)に関する計算がD(0)と同じ波数ベクトルのセット
を利用できるようにバンド計算の波数ベクトルを設定しておけば、すべてD(0)の計算値(すなわち、位
相因子を考えないときの値)を流用できる。このとき、 LµνP および k,µνW の 1 階微分を導出する方法は、
平成 15年度に取り扱った coupled-perturbed Hartree-Fock (CPHF)法[3]による摂動論を応用したアルゴリズ
ムを全くそのまま用いることができる。すなわち、周期系電子波動関数の 1 階導関数を
∑ ∑ ⋅−−′=∂
∂
µµµµ ϕ
ψ Lk
Lk
k LRrr im
m ecz
)()(, (12)
と表現すると、その係数 kmc ,µ′ は式(1)の係数 kmc ,µ からなる行列C(0)と、行列要素 )1(mnu が
)1()1(
21
mmmmu S−= , kk
k
mn
nmnmnmnu
εεε
−−
=)1()1(
)1( SF ( nm ≠ ) (13)
である行列U(1)との行列積C(1) = C(0)U(1) で与えられる行列要素{C(1)}µ,mにより決定される。 )1(mnS および )1(
mnFはそれぞれ重なり行列要素 k,µνS 、Fock 行列要素 k,µνF の 1 次摂動寄与
∑=
∗⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂=
νµν
µνµ
,,
0
,,
)1(k
kk n
zmmn c
zS
cS ; (14)
∑=
∗⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂=
νµν
µνµ
,,
0
,,
)1(k
kk n
zmmn c
zF
cF (15)
であり、前者は容易に解析的な計算が可能であるが、後者は右辺の計算が )1(mnu 自身に依存するので自己
無撞着的に値を求めなければならない。こうして得られた周期系電子波動関数の 1 階導関数から LµνP お
よび k,µνW の 1 階微分が計算できる。
3. 応用計算
3.1 結晶のフォノン分散曲線 本研究で導出したアルゴリズムに従ってダイナミカル行列 D(q)の行列
要素を計算するプログラムコードを作成し、LCAO 展開波動関数で電子状態を計算したいくつかの結晶
についてフォノン分散曲線を求めるテスト計算を行った。フォノン分散曲線は逆格子空間上の決められ
た経路に沿って動く q に対して、D(q)を対角化して得られる基準振動数をつないだものである。D(q)を対角化したときの固有値と固有ベクトルがそれぞれ振動数ωの 2 乗、振動モードに相当する。 計算例として、LiF結晶およびCaF2結晶の立方晶格子最小セル(立方晶の格子長をa0とすると、最小セ
ルの格子定数はa = b = c = 2–1/2a0, α = β = γ = 60°)におけるD(q)の対角化により得られたフォノン分散曲線
を図1に示す。最小セルにはLiF結晶では2個、CaF2結晶では3個の原子が含まれるので、フォノン分散曲
線の数は前者が6、後者が9となる。基底関数としてトリプルゼータ型の使用や分極関数を加えるなど高
級な基底関数系を選択した場合、本研究の手法によるフォノン分散曲線は実測から得られるそれと比較
第4章 研究成果報告

して振動数の値がやや小さくなるが、曲
線の形や相対的な位置関係は実測による
フォノン分散曲線とよく一致した。 3.2 検討事項 本研究ではダイナミカ
ル行列D(q)を求めるための位相qの取り
入れ方として、古くから行われてきた剛
体イオンモデルや単純殻モデルに代表さ
れるような古典力学的取り扱いと同じ手
法を採用した。“ABINIT”による平面波
展開基底関数を用いた第一原理に基づく
フォノン分散シミュレーションも同様の
手法である。しかしながら実際は量子力
学として取り扱う以上、位相因子の組み
入れは正確を期すべきであり、真の位相
はRigged QED (quantum electrodynamics)理論[4]のバックグラウンドなしには決
定されず、本研究で行ったD(q)を導出す
るための位相の取り扱いは正確ではない。
現状の“近似”計算でフォノン分散のシ
ミュレーションは行える状態にあるが、
D(q)における位相を正確に取り扱うこと
ができるように改良する必要がある。
4. まとめ、今後の研究計画
平成 15 年度・16 年度は周期系 LCAO展開波動関数の微分導出、ダイナミカル
行列の導出、および結晶系の応用計算に
適用されるプログラムコード開発を行っ
た。来年度以降はこれまで行ってきた振
動特性解析のアプローチをもとに、不純物・欠陥を含む大規模モデルでの振動モードが不純物・欠陥の
拡散過程とどのようにカップリングするかを検討し、その応用として金属酸化物等の固体相転移につい
て微視的な相転移機構を大規模モデルの計算により明らかにしたいと考えている。しかし、大規模モデ
ルにおいて電子状態による力場を直接計算するのはコスト的にたいへん困難なので、平成 17 年度は材料
を“原子の集合体”としての視点でとらえ、材料系における「原子自らがもつ性質」と「原子間相互作
用」をそれぞれ原子領域内の相互作用、原子領域間の相互作用として各原子に電子状態による作用を割
り当てていく研究を行い、原子領域が含有する電子物性解析と振動特性解析を組み合わせて、大規模動
力学シミュレーションへの適用をはかっていく。
参考文献
[1] X. Gonze et al., ABINIT, (2002), Université Catholique de Louvain, [2] 中村康一,電子波動関数の摂動論的アプローチによる固体材料の振動特性解析,21 世紀COE プログラム「動的機能機械システムの数理モデルと設計論」平成 15 年度年次報告書,(2004),pp. 137-140. [3] A. Pople, R. Krishnan, H. B. Schlegel, and J. S. Binkley, “Derivative Studies in Hartree-Fock and Møller-Plesset Theories,” Int. J. Quant. Chem. Symp., 13, (1979), 225. [4] A. Tachibana, in: E. J. Brändas and E. S. Kryachko (eds.), Fundamental World of Quantum Chemistry: A Tribute to the Memory of Per-Olov Löwdin, Vol. 2, (2003), pp. 211-239, Kluwer Academic Publishers, Dordrecht.
0
2
4
6
8
10
12
14
16
18
20
0 0.2 0.4 0.6 0.8 10
2
4
6
8
10
12
14
16
18
20
1 0.8 0.6 0.4 0.2 00
2
4
6
8
10
12
14
16
18
20
0 0.2 0.4
Γ Γ ΓX X K L
Σ∆ Λ
cps (
1012
sec-1
)
0
2
4
6
8
10
12
14
16
18
20
0 0.2 0.4 0.6 0.8 10
2
4
6
8
10
12
14
16
18
20
1 0.8 0.6 0.4 0.2 00
2
4
6
8
10
12
14
16
18
20
0 0.2 0.4
Γ Γ ΓX X K L
Σ∆ Λ
cps (
1012
sec-1
)
(a)
0
2
4
6
8
10
12
14
16
18
20
0 0.2 0.40
2
4
6
8
10
12
14
16
18
20
1 0.8 0.6 0.4 0.2 00
2
4
6
8
10
12
14
16
18
20
0 0.2 0.4 0.6 0.8 1
Γ Γ ΓX X K L
Σ∆ Λcp
s (10
12se
c-1)
0
2
4
6
8
10
12
14
16
18
20
0 0.2 0.40
2
4
6
8
10
12
14
16
18
20
1 0.8 0.6 0.4 0.2 00
2
4
6
8
10
12
14
16
18
20
0 0.2 0.4 0.6 0.8 1
Γ Γ ΓX X K L
Σ∆ Λcp
s (10
12se
c-1)
(b)
図 1 (a)LiF 結晶および(b)CaF2結晶のフォノン分散曲線 (基底関数Li: 6-11G; Ca: 86-511d3G; F: 7-311G)
図 1 光照射発光観測装置の概略図
半導体薄膜の光誘起変化の研究
工学研究科機械物理工学専攻 蓮尾 昌裕
Abstract: We have deposited CuCl thin films on several substrates with a vacuum vapor deposition method at room temperature. We irradiated them at 4.6 K with pico-second ultra-violet light pulses of 82 MHz repetition rate. From the excitation photon energy dependence of the luminescence spectra, it was found that the Z3-exciton luminescence is resolved into two components: one is attributed to the optical phonon Raman lines and the other to the free Z3-exciton luminescence. The film-thickness and substrate dependences of the free Z3-exciton luminescence spectra suggested that the Z3 excitons can not relax to the bottleneck region during their lifetime in thinner films and that the relaxation is determined by the film thickness rather than the substrates we used in the experiment. From the sample temperature dependence of the luminescence spectra, the origin of the new luminescence, which appears after long time photo-irradiation, was found to be associated with a new bound exciton state of the Z3-excitons that is generated by long time photo-irradiation with pico-second ultra-violet light pulses. The generation of the new bound exciton state was found to hardly contribute the intra-band relaxation of the Z3-excitons Key words: thin film CuCl, luminescence, exciton, photo-induced phenomena
1. はじめに
塩化第一銅(CuCl)はバンドギャップ 3.399 eV の直接遷移型半導体であり,励起子の関与する光学応
答が紫外域に観測される.CuCl の励起子系はその束縛エネルギーが 190 meV と大きいことやバンド構
造が簡単なことなどの理由により,その性質について活発に研究がなされてきた.最近では量子閉じ込め
系に関する興味から,ナノ構造における光学特性が調べられてきたが,形状が制御され,かつ良く光る
試料を得るのが必ずしも容易ではなかった.試料の質と形状,物質内の素励起とその緩和,素励起と光
との結合,界面の寄与などが複雑に関連した結果だと考えられるが,そのような観点からの理解は十分
になされていない.これまでの我々の研究により, 厚さ数 10 ~1000 nm の真空蒸着膜で励起子発光ス
ペクトルが十分な SN 比で観測されること,長時間の光照射によりそのスペクトルが変化することが明
らかになった.ここではこれらの実験の詳細について述べ,励起子発光の起源や励起子の熱的緩和過程,
光照射による変化に関するメカニズムについて新たに得られた知見を報告する.
2. 実験装置
基板は鏡面研磨されたTiO2ルチル単結晶,Al2O3
サファイア単結晶,SiO2人工水晶単結晶を用いた.
ルチルTiO2はバンドギャップエネルギーが3.03
eVとCuClの最低エネルギー状態の励起子である
Z3 励起子(2.204 eV)より低エネルギー側になる.
屈折率が大きいため,光の全反射に伴う近接場光
二光子励起を用いた励起子観測が可能である[1].一方,サファイアおよび水晶はバンドギャップエ
ネルギーがそれぞれ約8 eV,約9 eVであり,紫外
域において透明である.基板は純水で洗浄し,そ
の後に自然乾燥させた.原料となるCuCl は真空
蒸留し,その後ゾーンメルティング法で精製した
ものを使用した.真空蒸着は自作した蒸着装置で
第4章 研究成果報告

図 2 Z 3励起子発光スペクトルの励起光エネルギー依存性,
各スペクトルの左に励起光エネルギーを示す.
矢印の上はラマン散乱で放出される光学フォノンを示す.
行った.基板は室温,CuClはセラミックのるつぼで約400 ℃に加熱し,真空度4×10-4 Pで蒸着を行った.
蒸着中に半導体レーザーからの波長658 nmの光を試料表面に入射し,その反射光強度をモニターするこ
とで膜厚のその場観測を行い,所定の膜厚を得た.試料蒸着後の熱処理は行っていない. 図 1 に光照射および発光観測実験装置の概略図を示す.光源はパルス幅約 1 ps,スペクトル幅約 0.8
meV ,繰り返し 82 MHz の mode-locked Ti-sapphire レーザーであり,その 2 倍波を励起光として用い
た.試料は熱伝導型クライオスタットを用いて 4.6 K まで冷却した.クライオスタットの窓直前での励
起光の平均強度は 10 mW であった.励起光はレンズで直径約 200 µm に集光し,CuCl 蒸着膜の表面に
垂直入射した.試料からの発光は分光器のスリットに集光し,そのスペクトルを液体窒素冷却型 CCD カメラで観測した.測定系の分解能は 0.5 meV である.スペクトルの波長較正は水銀スペクトルを用いて
行った.
3. 結果と考察
3.1 Z3励起子発光と Z3励起子の熱的緩和メカニズム
図 2に TiO2ルチル基板上厚さ 50 nm の蒸着膜における Z3励起子発光スペクトルの励起光エネルギー
依存性を示す.励起光エネルギーに依存して,スペクトル形状が変化していることが分かる.図中の-1LO(放出される光学フォノンを表す)などの下にある矢印は,レーザー光の光学フォノンを介したラマン
散乱のエネルギー位置を示す.ラマン散乱のエネルギー位置に構造が確認され,またそのエネルギー位
置がZ3励起子帯に重なるとその強度が共鳴的に増大することが確認された[2].CuCl におけるこのよう
な観測例はこれまで報告されていない.また,図中Z3で示した発光エネルギー位置が励起光エネルギー
に依存しない構造も観測された.発光のエネルギー位置から結晶中を自由に動き回るZ3励起子が結晶の
表面で光に変換されたZ3自由励起子発光と考えられる.このように,作成した試料では物質固有の発光
や光散乱が精度良く観測され,CuCl 励起子系研究に有用であることを示唆している.
図 3 に TiO2ルチル基板上蒸着膜における Z3励起子発光スペクトルの膜厚依存性を示す.励起光エネ
ルギーは 3.290 eV とした.合わせてゾーンメルティング法で精製した 1 cm 角のバルクCuCl 試料のスペ
クトルも示した.観測される構造はラマン散乱とZ3自由励起子発光によるものである.図中の矢印で示
したラマン散乱のエネルギー位置は膜厚に依存せず,ラマン散乱であるとの解釈の妥当性を支持してい
る.一方,膜厚が厚くなるにつれ,free-Z3で示したZ3自由励起子発光の低エネルギー側のすそがより低
エネルギーにシフトし,図中 ETの矢印で示す Z3横波励起子のエネルギーに近づくことが分かった.こ

図 3 Z 3励起子発光スペクトルの
膜厚依存性
図 4 Z 3励起子発光スペクトルの基板依存性
れは,膜厚が厚くなるほどZ3自由励起子発光がより長い時間
結晶内を伝播し,その過程でなんらかの熱的緩和をバンド内
で受けると定性的に解釈される.すなわち,薄い試料ではZ3
自由励起子がすぐに表面に到達し,光に変換されるので,熱
的に十分緩和されていない,いわゆる熱い励起子発光となっ
ていることを示している.このような熱い励起子発光につい
てはこれまで議論されてきたが,このように系統的に観測さ
れた例はない.
図4(a)に発光スペクトルの基板依存性を示す.膜厚は 200 nm,励起光エネルギーは 3.290 eV とした.真空蒸着において
同じバッチで作成した試料である.Z3 ,I1 ,N1 で示した発
光は それぞれZ3 励起子発光,I1束縛励起子発光,N1 発光に
対応する.I1束縛励起子発光,N1 発光は Cu+欠陥によると考
えられる中性アクセプターに束縛された励起子,励起子分子
の発光とそれぞれ考えられている.基板により各発光のエネ
ルギー位置が最大 2 meV ほど異なった.このずれは観測され
た全ての発光スペクトルで見られ,その起源として基板の熱
収縮率の違いによる CuCl 薄膜中の応力か,基板の熱伝導率の違いによる試料温度の違いが考えられる
が,同定は出来ていない.一方,ラマン散乱のエネルギー位置は基板に依存しない.これはラマン散乱
のエネルギー位置が励起光エネルギーと光学フォノンエネルギーのみで決まることと整合している.
図 4(b)は Z3発光スペクトルの形状の違いを見るために,スペクトル形状がシャープな I1束縛励起子
発光のピークエネルギーが重なるようにスペクトルの横軸を調整したものである.Z3自由励起子のバン
ド内熱的緩和の程度を現す低エネルギー側のすそのエネルギー位置が基板によらず,ほぼ一定である.
このことは,Z3自由励起子のバンド内熱的緩和は主として膜厚によって決まり,実験に用いた基板に依
存しないことを示している.TiO2ルチル基板ではバンドギャップエネルギーが小さいため,Z3自由励起
子により基板が励起されると考えられるが,その効果はZ3自由励起子発光スペクトルには観測されなか
った.
3.2 光照射による新しい励起子発光の出現とその起源
昨年度の研究においてTiO2ルチル,サファイア,人工水晶の各基板上の蒸着膜で,紫外光照射により
その励起子発光スペクトルに変化が生じることを明らかにした.このことはスペクトルの変化が CuCl固有の現象であることを示唆している.本年度はバルク試料に対して昨年度同様の計測を行った.実験
第4章 研究成果報告

図 5 光照射によるバルクCuCl 試料
の発光スペクトル変化
図 6 (a) 5 時間光照射後のバルクCuCl 試料の発光スペクトルの温度依存性 (b) 励起子発光強度の温度依存性と励起子のダイナミクスについてのモデル
装置は図 1 と同じである.励起子発光スペクトルの時間変化を図
5 に示す。試料温度は 4.6 K,照射光エネルギーは 3.29 eV,光照
射は継続的に行い,発光スペクトルの計測は光照射中,CCD カメ
ラの露光時間 100 ms で行った.蒸着膜同様,光照射を開始して数
分間のうちに観測されるすべての励起子発光強度の減少が見られ
た.さらに蒸着膜同様,数時間の光照射で,I1 束縛励起子発光の
低エネルギー側に図中 A,B,C で示した新しい発光が出現する
ことが確認された.3 つの構造は互いに類似の形状をしており,
かつ隣り合う構造のピークのエネルギー差はCuCl 結晶の LO(縦
波光学)フォノンエネルギーとほぼ同じ 25.7 meVであり,A,B,C は LO フォノンを介したレプリカ発光であることを示唆してい
る.また,Z3励起子発光スペクトルはZ3自由励起子発光,共鳴的
に増大するラマン散乱ともに長時間の光照射でもその形状は変化
しなかった.このことは,新しい発光の出現がZ3励起子の緩和に
あまり影響を与えていないことを示している.
図6(a)に5時間光照射後の発光スペクトルの試料温度依存性を
示す.Z3 励起子発光,I1束縛励起子発光と新しい発光のエネルギ
ーシフトは類似の温度依存性を示し,その温度依存性は CuCl バルク結晶の励起子発光エネルギー位置の温度依存性と同様である.
このことは,新しい発光が CuCl の電子励起に起因することを示
唆している.また,I1束縛励起子発光は試料温度が約 40 K を超えると急激にその強度が減少し,新しい
発光は約 60 K でその強度が減少する.このことは,両発光とも熱的励起過程により消光し,その活性化
エネルギーが異なることを示唆している.
図6(b)は,各励起子発光強度の温度依存性を示したものである.図の横軸は試料温度の逆数をとった.
温度の増加に伴い,急激に発光強度が減少していることが読み取れる.図6(b)の下には,熱的励起過程

図 7 (a) Z3 励起子発光,(b) I1束縛励起子発光,(c)新しい発光の励起スペクトル
図 8 5 時間光照射後の発光スペクトル
各スペクトルの左に光照射中の 光エネルギーを示す。
を考慮した励起子の束縛状態のダイナミクスについてのモデルを示した.このモデルを基に発光強度の
温度依存性をフィッティングした結果が図中の曲線である.実験結果と良い一致を示すことが分かった.
フィッティングのパラメータとして熱活性化エネルギーが得られるが,I1 束縛励起子発光と新しい発光
それぞれに,26.3±2.7 meV,47.9±2.7 meV の値が得られた.I1束縛励起子発光と新しい発光A それぞ
れのピークエネルギー位置から熱活性化状態のエネルギーを求めると,それぞれ 3.2065±0.0027 eV,
3.2059±0.0027 eV となる.両者は誤差範囲内であり,Z3 励起子のエネルギーに一致する.すなわち新し
い発光の起源となる状態は,I1束縛励起子同様,Z3 励起子が束縛状態に捕獲された状態であることが考
えられる[3].図 6(b)で見られる I1束縛励起子発光と新しい発光の発光強度が減少する温度領域での Z3
励起子発光強度の増大は,この解釈と整合している.
図 7(a)(b)(c)は Z3 励起子発光,I1 束縛励起子発光と新しい発光の励起スペクトルである.試料は TiO2
ルチル基板上厚さ 50 nmの蒸着膜を用いた. I1束縛励起子発光と新しい発光の励起スペクトルはともに
CuCl の励起子吸収スペクトルと類似の形状を持つ.このことは,励起光で作られた励起子が何らかの緩
和過程を経て,それぞれの束縛状態に捕獲されることを示
している.一方,Z3 励起子発光の励起スペクトルは I1束縛
励起子発光と新しい発光の励起スペクトルと大きく異なり,
光学フォノンの構造が鮮明に観測されている.この構造は
Z3 励起子帯で共鳴的に増大するラマン散乱の寄与による
ものである.このことは,共鳴ラマン散乱過程は束縛励起
子状態生成にほどんと寄与しないことを示している。ラマ
ン散乱が励起子の実励起を伴わないコヒーレントな光散乱
過程と考えればこのことは自然であるが,共鳴ラマン散乱
過程で励起子の実励起を伴わないかどうかはまだ検討の余
地がある.この系が共鳴ラマン散乱過程の理解を深める系
となりえることが期待される. 以上の研究により,長時間の紫外光照射により CuCl に
Z3 励起子のこれまで報告例の無い新しい束縛状態が生成
されることが明らかになった.図 8 は照射光エネルギーを
変え,このような新しい発光が出現するか調べた結果であ
る.スペクトルの観測は,図中に示された照射光エネルギ
ーで 5 時間の光照射後, 3.290 eV の励起光エネルギーを用
いて行った.3.20 eV 以上の照射光エネルギーで新しい発光
の出現が観測されている一方,3.18 eV 以下のエネルギーで
は観測されなかった.3.18 eV は I1束縛励起子のエネルギー
であるが,このエネルギーで観測されなかったことより,
第4章 研究成果報告

新しい発光の出現にはZ3 励起子以上のCuCl の電子励起が寄与していると考えられる.
4. 結論と展望
CuCl の真空蒸着膜やバルク試料の発光スペクトルの詳細かつ系統的な観測により、CuCl の Z3 励起
子の発光過程や緩和過程に新たな知見が得られた.また,我々が見出した長時間の紫外光照射により誘
起される新たな発光の起源が明らかになった.一方我々は昨年の成果報告書に記したように,紫外光照
射により CuCl 蒸着膜の形状にも,薄膜の平坦化,ナノ構造,マイクロ構造の出現など永続的な変化が
起こることを見出してきた.I1束縛励起子発光が,CuCl 結晶のCu+欠陥に束縛されたZ3 励起子の発光と
考えられることを踏まえると,Z3 励起子の新しい束縛状態に起因する新しい発光の出現は,長時間の紫
外光照射、もしくは CuCl の電子励起により,結晶中に格子欠陥に類するなんらかの欠陥が生じること
を示唆している.これが薄膜自体の形状変化につながった可能性も否定できず,その相関の解明が待た
れる.また,CuCl はナノ構造とその光学特性に興味が持たれている.本年度までの研究で,再現性良く
光る試料を得ることは困難でなくなったが,ナノ構造に起因すると考えられる発光の検出には至らなか
った.これも今後の課題である.平坦な基板ではなくナノ構造を有する基板の積極的利用も一つの方向
であろう.本研究で知見が深まった励起子の緩和過程が,複雑形状を持つ基板によりどう影響を受ける
か明らかにすることも興味深いと考えられる.
参考文献
[1] M.Hasuo, A.Shimamoto and T.Fujimoto, Two-photon excitation of excitons in CuCl in total reflection geometry. J. Microsc. 209-3 (2003), 177-181.
[2] M. Hasuo, A. Shimamoto and T. Fujimoto, Exciton Luminescence Spectra of CuCl Films and Their Change by Photo-irradiation, J.Lumin., 112, (2005) 181.
[3] A.Shimamoto, T.Fujiwara, A.Iwamae, T.Fujimoto and M.Hasuo, Exciton Luminescence of CuCl Associated with a New Bound State Generated by Long Time Photo-irradiation, J.Phys.Soc.Jpn., in press.

パターニング基板上へのナノコラムの自己組織的選択成長
工学研究科機械物理工学専攻 鈴木基史
Abstract: We have demonstrated the selective growth of thin films with tailored nanocolumns on the pre-patterned substrates. The inverse-torus shapes have been successfully created by electron beam lithography,and Ti has deposited by dynamic oblique deposition on such pre-patterned substrates. Under the geomet-rical deposition conditions, where the deposition angle is large enough to prevent the deposition flux fromdirectly depositing on the inverse-torus, the nanocolumns grow only on the higher part of the pre-patternedsubstrates. This physical self-assemble process will be useful to evaluate the lateral deformation of thenanocolumnar thin films.Key words: dynamic oblique deposition, thin films, nanotechnology
1. はじめに
我々は,真空蒸着による成膜のプロセスにおいて,基板と蒸着源の方位関係を制御する動的斜め蒸着によって薄膜の内部形態を制御し,形態と密接に関わる機能性の発現と,その応用に関する研究を進めている.動的斜め蒸着法によれば,成膜中の基板の面内方位の制御によって螺旋やジグザグなどの様々な形態を成長させることが可能でるが [1],共通したかたちの特長は「細長い」ことであり,これに起因する光学的,磁気的な異方性を示すことが知られている.当然ながら機械的な性質に対しても興味がもたれているが,これまでの研究例ではバネ形のコラム構造の膜厚方向への伸縮特性が評価されているのみである [2,3].「細長い」かたちで最も興味深い横方向の変形や,動的な性質に関する研究はほとんど進んでいない.そこで我々は本助成研究で動的斜め蒸着膜内部に形成されるナノコラムの横方向の変形特性の測定や,外部信号に応答して変形する新しいアクチュエータの実現を目的とした研究を開始した.昨年度までに成膜装置の整備がほぼ完了し [4],今年度は具体的なテストサンプルの作製の検討を行った.本報告書では,細長いコラムの横方向の変形測定を目的とした,パターニング基板上へのナノコラムの選択成長の原理確認を行った結果について報告する.
2. 実験
2.1 理想的なテストサンプルの形態 動的斜め蒸着法を用いると,例えば図 1の SEM像の部分に示したような細長いコラム構造を作製することができる.コラムの集合体の横方向の変形特性は,図に示したように一部のコラムを取り除いて 1 �m程度の大きさのコラムの集合体を作製し,その部分の最上層に形成したキャッピング層を原子間力顕微鏡 (AFM)の探針で横方向に押して,力と変位を測定することによって評価できると考える.実際に実験を行うためには,1)コラムを取り除く部分はAFMの探針をおろすことができるように十分広く取る.2) AFMをおろす部分の表面はできるだけ平坦にする.3) キャッピング層はコラムの剛性に比べて十分固くする.ことが必要である.参考文献 [1]で報告されているように,動的斜め蒸着法を用いれば高密度のキャッピング層を形成することはそれほど困難なことではない.これに対し,1 �m程度の微細なコラムの集合体を,孤立して配置するためには工夫が必要である.図 1から明らかなように,動的斜め蒸着膜は多孔質であるため一般的な微細加工技術を用いると,レジストが内部まで含浸し,乾燥時の収縮によってコラム構造が崩れてしまう可能性がある.そこで我々は,動的斜め蒸着の長所を最大限に生かしたパターニング基板上への選択成長を試みた.次節では,選択成長のアイディアについて述べる.
2.2 プロセスの設計 基板に適当な凸部をもうけた基板上に斜め蒸着すると,凸部の影になって蒸着流が直接入射しない部分には膜が成長しないため,凸部に選択的にナノコラムを成長させることが可能である [5].本研究では前節の 2)の条件を実現するため,ナノコラムを選択成長させる凸部の周囲が面内のどの方位から蒸着されても影になるように,逆ドーナツ形のパターンを採用
第4章 研究成果報告

図 1: AFMを用いたナノコラムの機械的性質評価の概念図
h
d
D
γ
h/2
図 2: 逆ドーナツパターンの模式図
することにした.図 2に逆ドーナツパターンの模式図を示す.成膜前にあらかじめ基板に内径 �,外径�の凹部 (逆ドーナツ)を形成しておき,蒸着角 �を ��� � � �� � ����を満たす角度 �と同程度に設定すれば,逆ドーナツの底の部分には蒸着粒子が直接付着することはない.ここで �は逆ドーナツの深さである.機械特性の評価のためには逆ドーナツの部分にAFMの探針をおろすことになるため,逆ドーナツの幅 �� � ����は逆ドーナツパターン上に形成する膜の厚さにもよるが,少なくとも 1 �mは必要であろう.動的斜め蒸着でナノコラムを作製する際の典型的な蒸着角 �は,��Æ � �Æ程度であるから,逆ドーナツの深さ �は数 100 nmあればよいことになる.今回の目的は原理確認であるため,電子ビーム描画に使用するレジストをそのまま逆ドーナツパターンとして使用することにした.典型的な条件で塗布したレジストの厚さがおよそ 300 nmになることがわかっているため,�� � � � �Æで成膜することを想定して内径と外径が異なるパターンをいくつか形成した.そしてその上に Tiの動的斜め蒸着膜を成膜し,選択成長の成否を確認した.次節で具体的なテストサンプルの作製条件を述べる.
2.3 テストサンプルの作製条件
2.3.1 パターニング 今回の目的は選択成長の原理確認であるため,Siウェハに日本ゼオンの EB露光用のレジスト (ZEP520)を塗布したものを基板として使用することにした.メーカ推奨の条件で塗布したレジストの厚さはおよそ 270 nmであった.逆ドーナツパターンは JEOLの走査型電子顕微鏡 JSM-5310をベースに構成された電子ビーム (EB)描画装置によって作製した.予備検討の結果,我々の目的に適した典型的な EBの照射条件は,電流値� nA,ドーズ量 �� � � � C/cm�
であった.逆ドーナツの内径 �や外径�の異なる様々なパターンを作製したが,本報告書では特に � �
�mとし,� � ��, 2.7, 4.4 nmのパターンについての結果を報告する.これらのパターンに対応する � の値はそれぞれ � Æ, Æ, �Æ である.これらのパターンについて AFMで形態を観察した結果,図 3に示すようにほぼ設計値通りのパターンが作製できていることを確認した.
2.3.2 動的斜め蒸着 パターニング後の表面に動的斜め蒸着膜によってナノコラムの選択形成を試みた.成膜後の試料の SEM観察を容易にするため,今回の実験では導電性のある Tiを膜材料として選択した.Tiの蒸発源に対して基板を �Æにセットし,およそ 70 nm堆積するごとに基板

図 3: 電流値 1 nA,ドーズ量 60 �C/cm�でパターニングした部分のAFM像
図 4: 平坦な Si基板に成膜した Tiの回転斜め蒸着膜の SEM像.蒸着角 80Æ,70 nm堆積するごとに面内で 1回転させながら成膜した.
が面内で一回転するように制御しながら全膜厚が 420 nmになるまで成膜した.図 4に平坦な基板に成膜した膜の断面の SEM像を示す.明確な螺旋構造が形成されていることが確認できる.
3. 結果と考察
図 5に �の異なるパターン上に作製したテストサンプルの SEM像を示す.� � � Æ,Æのサンプルでは中心の凸部に選択的にナノコラムが成長しており,逆ドーナツの底の部分には目立った構造は見られない.これに対し,� � �Æのサンプルでは,中心の凸部に選択的にナノコラムが成長していることについては他のサンプルと同様であるが,逆ドーナツの底の部分にわずかではあるが蒸着されていることがわかる.本実験の Tiの蒸着の角度はどの試料についても �Æであるから,� � � Æ,Æの場合は逆ドーナツの底の部分に直接 Tiが入射しない.これに対して � � �Æ
のパターンでは円の動径方向に見ると蒸着流がちょうど中心部の凸部の根元の部分に入射する配
� � � Æ � � Æ � � �Æ
図 5: �の異なる試料の SEM像.
第4章 研究成果報告

置になっており,逆ドーナツの底の部分がわずかではあるが Tiの蒸着流にさらされたため逆ドーナツの底の部分にわずかに Tiが蒸着されたと考えられる.すなわちナノコラムの成長する場所に関しては幾何学的な条件でほぼ矛盾なく解釈できる.しかしながら,今回作製したサンプルには,図 4に見られるような明確な螺旋構造が形成されていない.これは逆ドーナツパターンの近傍に限らず平坦な部分でも同様であり,レジストを下地として用いたことが影響している可能性がある.詳しい原因の解明とコラムの形態の改善は,コラム上へのキャッピング層の形成の検討とともに今後の課題とする.
4. まとめと今後の展開
成膜前の基板にあらかじめ逆ドーナツ形のパターニングを施し,その上に動的斜め蒸着によって Tiを成膜した.その結果,逆ドーナツパターンと蒸着源の幾何学的な関係で決まる蒸着粒子のシャドウイングによって,ナノコラムを逆ドーナツ中心部の凸部にのみ選択的に成長させることができることを実証した.この技術を応用すれば,AFMの探針を逆ドーナツの部分におろして横方向にナノコラムを押すことが可能になり,これまで知られていなかったナノコラムの横方向の機械的性質を知ることができる.
謝辞
本研究は鈴木由希子,岸本一昭,前北渉,中嶋薫,木村健二の協力を得て推進した.また,本学機械工学専攻の小寺研究室の皆様,島研究室の皆様,木下技官,機械物理工学専攻の北村研究室の皆様には微細加工やナノ構造観察で大変お世話になりました.ここに御礼申し上げます.
研究発表実績 (関連の研究成果を含む)口頭発表: 国内会議: 9件,国際会議: 5件
学術論文,会議論文:
� M. Suzuki, W. Maekita, K. Kishimoto, S. Teramura, K. Nakajima, K. Kimura, Y. Taga, Direct formationof arrays of prolate Ag nanoparticles by dynamic oblique deposition, Jpn. J. Appl. Phys. 44-5 (2005)L193–L195.
� W. Maekita, M. Suzuki, K. Kishimoto, K. Nakajima, K. Kimura, Dichroism of thin films containing alignedAg nanoparticles prepared by multi-source dynamic oblique deposition, E. Wang, E. Chason, H. Huang,G. Gilmer (Eds.), Kinetics-Driven Nanopatterning on Surfaces, Vol. 849 of Mater. Res. Soc. Symp. Proc.,(2005) KK3.3.1–KK3.3.6.
� M. Suzuki, K. Kishimoto, W. Maekita, K. Nakajima, K. Kimura, Photocatalysis of columnar TiO � thinfilms, E. Wang, E. Chason, H. Huang, G. Gilmer (Eds.), Kinetics-Driven Nanopatterning on Surfaces, Vol.849 of Mater. Res. Soc. Symp. Proc., (2005) KK8.7.1–KK8.7.6.
� S. Jomori, M. Suzuki, K. Nakajima, K. Kimura, Suppression of reaction between Si substrate and obliquelydeposited Fe atoms, E. Wang, E. Chason, H. Huang, G. Gilmer (Eds.), Kinetics-Driven Nanopatterning onSurfaces, Vol. 849 of Mater. Res. Soc. Symp. Proc., (2005) KK8.8.1–KK8.8.6.
特許出願: 1件
参考文献
[1] M. Suzuki, Y. Taga, Integrated sculptured thin films, Jpn. J. Appl. Phys. Part 2 40-4A (2001) L358–L359.
[2] M. Seto, K. Robbie, D. Vick, M. Brett, L. Kuhn, Mechanical response of thin films with helicalmicrostructures, J. Vac. Sci. & Technol. B 17-5 (1999) 2172–2177.
[3] D. Liu, D. Ye, F. Khan, F. Tang, B. Lim, R. Picu, G. Wang, T. Lu, Mechanics of patterned helical Sisprings on Si substrate, J. Nanoscience and Nanotechnology 3-6 (2003) 492–495.
[4] 鈴木基史, 機能性材料を用いた動的斜め蒸着膜の作製, 21世紀 COEプログラム「動的機能機械システムの数理モデルと設計論平成 15年度年次報告書 (2004) 167–172.
[5] B. Dick, M. Brett, T. Smy, M. Freeman, M. Malac, R. Egerton, Periodic magnetic microstructuresby glancing angle deposition, J. Vac. Sci. & Technol. A 18-4 (2000) 1838–1844.

組成変調による薄膜材料の結晶構造制御
およびその電気・機械的特性の評価
工学研究科機械工学専攻 神野 伊策
Abstract: We have evaluated crystalline structure of epitaxial PZT films and investigated the electric properties. 4 circle x-ray diffraction measurements revealed that the c-axis oriented epitaxial PZT thin films, which are deposited on Pt/MgO by rf-sputtering, show significant difference of crystalline structure due to the clamping effects of the substrates. We have also evaluated the intrinsic crystalline structure of PZT thin films by means of powdered samples. The synchrotron radiation x-ray diffraction measurements demonstrated that the cite-exchange of Pb and Zr/Ti atoms occurs in perovskite unit cells, suggesting anomalous crystalline structure of the thin film materials is one of the reason of the difference of electric properties from the bulk ones. Key words: 21st century COE program, Annual report, Microsoft word, PDF, Electric data
1. はじめに
近年,MEMS関連技術の研究の進展に伴い,各種マイクロアクチュエータやマイクロセンサ,およびこ
れらを統合したデバイスの実用化が加速している.本研究では多様な機能性を有する強誘電体材料,そ
の中でも特に圧電特性を用いたMEMSデバイス開発を目的として研究を行っている.圧電材料の中で,特
にPZT系材料に注目し,その薄膜形成技術の確立から圧電特性評価法の検討,更に薄膜材料の圧電特性
向上に取り組んでいる.昨年度は,スパッタ法を用いたPZT圧電薄膜の成膜技術の開発,更にその圧電
特性の評価法について検討を行い,PZT 薄膜の結晶構造の違いが圧電特性に及ぼす影響について明らか
にした.今年度は,薄膜の構造を詳細に分析し,バルク材料で報告されている結晶構造との相違を明ら
かにすることを目的とした.強誘電体材料,特にペロブスカイト構造の場合,圧電特性をはじめとする
各種電気特性はその特徴的な結晶構造に由来し,各サイトに存在する正・負のイオン間の相互作用が各
種機能性発現の原因となる.これまで薄膜材料はバルクで確認できた特性を再現することを目的として,
同じ組成で均質な薄膜材料の開発に注力してきた.しかしながら,薄膜材料は基板上に形成し,更に強
誘電体材料の場合比較的高温での成膜,もしくは熱処理により結晶化させる必要があり,基板の拘束に
よる薄膜内部の応力は非常に大きい.しかしながら,圧電薄膜の構造についてこれまで系統的に調べた
研究はなく,薄膜材料として最適な結晶構造についての検討は行われていない.今回,c 軸配向エピタ
キシャルPZT薄膜の結晶構造をX線回折法を用いて詳細に測定し,薄膜の持つintrinsicな構造を突き
止めることで,薄膜とバルク焼結体との特性の相違についてその原因について議論する.PZT 薄膜の構
造は,基板上での結晶構造,つまり基板の拘束を受けた状態についてはじめに評価を行う.引き続き,
基板を除去した状態での構造解析を行い,基板拘束のない状態での状態がバルク材料と同じかどうかを
比較する.以上の評価によって,薄膜として使用するPZTの構造的な特徴が明らかとなる.
2. PZT薄膜の形成
PZT薄膜はrfスパッタ法を用いて形成した.エピタキシャル成長を行うため,基板として(100)Ptをあ
らかじめ成膜した(100)MgO基板を用いた.基板を約600℃程度に加熱して成膜することで,ペロブスカイ
ト構造を有するPZT薄膜が形成できた.MEMSへの応用を考慮して,膜厚は2.0~4.0μm程度とした.ス
パッタはArとO2の混合ガス中で行い,約0.5Pa程度の真空中でスパッタを行った.スパッタを行うターゲ
ットの組成は,Zr/Ti比が10/90,40/60,53/47,58/42,62/38および70/30までのターゲットを準備し,Zr/Ti比依存性についても検討を行った.Pbについては,Zr/Tiと比較して融点が低く非常に蒸発しやすい性質
のため,ターゲットには過剰なPbOを20mol%添加した焼結体を使用した.今回の特性評価では,特にZr/Ti
第4章 研究成果報告

組成比が70/30のPZT薄膜について詳細な構造評
価を行った.
3. 基板上のPZT薄膜の結晶構造
3.1 2θ/θ X線回折 形成したPZT薄膜は,は
じめに2θ/θのX線回折を用いて配向性につい
て評価を行った.図1にZr/Ti 比 53/47 の PZT
薄膜のXRDパターンを示す.図より形成したPZT
薄膜は完全にc軸に配向していり,パイロクロ
ア相などの異相,もしくは他の配向によるピー
クは見られなかった.Zr/Ti 比が 40/60 以下の
場合はc軸の他 a軸のピークも見られ,a/c ド
メインの存在が確認できた.一方53/47以上の
組成においてはほぼ同じ1軸配向のパターンが
見られた.
3.2 4 軸 X 線回折法により逆格子マッピング
Pt/MgO基板上に形成したPZT薄膜の結晶構造を
4軸XRDを用いて評価し,エピタキシャル薄膜
の面外,および面内の格子定数を求めた.図2
に (001)および(100)をzおよびx軸とした逆格
子点を示す.各逆格子点はバルクの値を用いて
プロットした.MgOおよびPtに関しては消滅則
により観測されない格子面があるが,エピタキシャル成長し
たPZT薄膜が得られた場合,これらMgOおよびPtの回折の近
傍に PZT の回折点が確認できることになる.PZT の回折点の
うち,図に示した(004)および(204)の格子点についての逆格
子マップを測定し,そこで得られた回折パターンからPZT薄
膜の詳細な結晶構造について評価を行った.図3(b)はPZT
薄膜の(204)ピーク付近の逆格子マップであるが,実線はMgO
とPtのピークを結んでおり,a軸とc軸の長さが等しい場合,
この線上にピークが位置する.PZT 薄膜の(204)のピークは,
この線上よりも右側に位置しており,面内の格子定数は面外
の格子定数より短い,つまりa<cとなる正方晶を示している.
しかしながらこのPZT薄膜の組成はZr/Ti=70/30であり,バ
ルク材料では菱面体晶を示し,a=cとなり,ほぼMgOとPtと
を結ぶライン上に位置するはずである.この相違は後で述べ
るように基板からの拘束が大きく影響している.図4に
(100)Pt/(100)MgO基板上にエピタキシャル成長させたPZT薄
膜の格子定数についてZr/Ti比依存性を示す[1].cおよびa
軸の長さは(004)および(204)の逆格子マップから算出したも
ので,それぞれ面外および面内の格子定数を示す.●および
○は今回測定したPZT薄膜の格子定数で,これらの点は赤線
で示した傾向を示す.一方■および□はバルクPZTの値であ
り,黒線でその依存性を示した[2].図より明らかなように,
(100)Pt/MgO 基板上に形成した PZT 薄膜の格子定数はバルク
と大きく異なっており,特にZr/Ti=53/47付近のバルク材料
20 30 40 501
102
104
106
(deg)
(a)
図1: (100)Pt/(100)MgO 基板上に形成した PZT 薄膜
(Zr/Ti=53/47)の XRD パターン
MgOPZTPt
(204)PZT(004)PZT
// [100]
↑// [001]
図2: Pt/MgO 基板上のエピタキシャル PZT 薄膜の
逆格子点
MgO(204)
PZT(204)
Pt(204)
0.500.45 0.55
Qx (A-1)
Qz (A-1)
(b)
1.02
1.00
0.94
0.96
0.98
0-0.50 0.500.25-0.25
MgO(004)
PZT(004)
Pt(004)
Qx (A-1)
Qz (A-1)
(a)1.04
1.02
1.00
0.94
0.96
0.98
1.04
図3:PZT 薄膜(Zr/Ti=70/30)の逆格子
パターン (a) (004)PZT, (b) (204)PZT

におけるモルフォトロピック相境界(MPB)が薄
膜材料では見られず,Zr/Ti 比が大きくなるに
つれてバルク材料同様c/aが減少するものの,
MPB 以上の組成域においても引き続き単調に
c/a が減少しながら正方晶を維持していた.こ
の様な特異な結晶構造はPZTをエピタキシャル
成長させた場合の特異な電気特性の起源となっ
ていると考えられる.図5はエピタキシャル
PZT圧電薄膜の圧電定数e31のZr/Ti比依存性で
ある.図より圧電定数はZr組成の増加とともに
徐々に増加し,バルクPZTのMPB組成以上では
大きな増加は見られず,バルクで報告されてい
るMPB近傍での圧電定数の増大は見られなかっ
た.この結果は,結晶構造におけるMPBの消滅
と対応している.一方,Zr組成の小さい領域で
の圧電性の低下は,電界の方向に対して垂直な分極方向を示すaドメインの増加および電界と同方向の
分極を持つcドメインの割合の低下が原因であると考えられる.
3.3 結晶構造の配向依存性 基板拘束による結晶構造の変形を検証するため,面方位の異なる基板を用
いてPZT薄膜をエピタキシャル成長させた.これまでの成膜では(100)面のMgO基板を用いたが,同様の
実験を(100)Ptを形成した(100)SrTiO3基板,および(111)Ptを形成した(111)SrTiO3基板を用いて行った.
図6はそれぞれの基板上に形成した PZT 薄膜の格子定数の Zr/Ti 組成依存性である[3].●および○は
(100)Pt/SrTiO3基板,■および□は(111)Pt/SrTiO3基板上に形成したPZT薄膜の格子定数であり,◆と
それを結ぶ線はバルクの格子定数依存性を示す.図より明らかなように,それぞれの基板上に形成した
PZT 格子定数は異なる傾向を示した.(100)Pt/SrTiO3 基板上の膜は前述の(100)Pt/MgO 基板の場合と同
様,Zr 組成比がバルクの MPB 組成より多い場合においても正方晶の構造を示す一方,(111)Pt/SrTiO3
基板の場合はMPB組成でほぼa=cの格子定数を示し,ZrがMPB組成よりも増加した場合は菱面体晶を有
していることを示唆している.このことは,(100)基板の場合,a軸が基板に拘束されることによりc軸
と異なる応力,つまり格子全体として異方的な応力場が生じているのに対し,(111)基板の場合は各軸が
基板に拘束されているものの,その応力状態は等しい等方的な応力場のため,バルクとよく似た組成依
存性を示したものと理解できる.
図4:(100)Pt/(100)MgO 基板上に形成した PZT 薄膜
の格子定数の Zr/Ti 比依存性
3.95
4.00
4.05
4.10
4.15
4.20
30 40 50 60 70 80
c /(100)STOa /(100)STOc /(111)STOa /(111)STObulk
x in Pb(ZrxTi
1-x)O
3 図6:(100)Pt/(100)SrTiO3 および(111)Pt/(111)SrTiO3基板上に形成した PZT 薄膜の格子定数の組成依存
性
0
1
2
3
4
5
6
7
8
0.2 0.3 0.4 0.5 0.6 0.7 0.8
|e31| (C/m2)
x in Pb(Zr1-x
Tix)O
3
図5:(100)Pt/(100)MgO基板上に形成したPZT薄
膜の圧電定数e31の Zr/Ti 比依存性
第4章 研究成果報告

4. 基板除去したPZT薄膜の結晶構造
4.1 放射光を用いた粉末PZT薄膜の評価 これ
までの議論は基板上に存在するPZT薄膜の結晶
構造についてものであり,基板拘束がその特異
性の主要因であることが明らかとなった.しか
しながら,図5および6に示した PZT 薄膜のい
ずれもその格子定数はバルクより大きな値を示
す,つまり格子体積が増加している結果を示し
た.通常,面内のaおよびb軸が伸びた場合,c
軸は減少するが,今回の実験の結果はその様に
なっていない.このことは,PZT 薄膜の結晶構
造の特異性は基板による拘束以外の別の要因も
あることを示唆している.そこで,基板拘束の
ない応力フリーの状態でのPZT薄膜本来の結晶
構造について評価を行った.
評価に用いたPZT薄膜はZr/Ti=70/30のター
ゲットで形成したものであり,詳細な構造解析
を行うためにWDS法による組成分析をはじめに
行った.測定の結果,形成した PZT 薄膜は,
Pb1.15(Zr0.68Ti0.32)0.85O3 で示される組成となり,Zr組成が若干減少している他に Pb が過剰に含まれ
ていることが明らかとなった.引き続き,MgO 基板
をウエットエッチングにより除去した後,残った
PZT薄膜とPt薄膜を粉末化し,その結晶構造を放
射光 (Spring-8 BL02B2 λ=0.4205A ) を用いて
評価した(図 7).薄膜材料は非常に微量であるた
め,通常の X 線回折測定では回折強度が低く構
造評価が困難であるが,高強度の放射光を用いる
ことにより強い回折強度が得られ高い精度で構造
解析を行うことが可能となる. 4.2 Pb1.15(Zr0.68Ti0.32)0.85O3薄膜の構造解析 得
られた回折パターンは Reitveld 法により構造解析
を行い,解析は RIETAN を用いて構造の精密評
価を行った.解析の結果,図8に示すとおり PZT薄膜は室温において R3m の構造とした場合に非
常によい収束結果が得られた[4].今回形成した
薄膜の厚みは 3.9um であるが、比較的厚い膜厚
においても結晶相を変化させる程度の大きな基板
拘束の影響が確認された.一方,通常のバルク材
料では,室温において Zr/Ti=68/32 の PZT は R3cの結晶構造を示すことが知られている.図9に今回測定した回折パターンと,R3mおよび R3cでのピーク位置
の比較を示す.図より,R3cで見られるべきピークは今回測定した薄膜では確認できず,結晶相は R3mの構造
であることがわかった.この結果は,基板の応力を解放した状態においてもバルクとは若干構造が変化してい
ることを示唆する結果が得られた. 更に注目すべき結果として,通常 A サイトにあるべき Pb 原子が B サイトに約 19%に至る過剰な量が侵入し
0.2mmφ
4~5mm
MgO t=0.3mm
Pt 0.1μm
PZT 2~4μm
10mm
λ=0.4205Å(E=29.5keV)
図 7:放射光による PZT 薄膜の構造評価
図8:粉末化PZT薄膜のSR 光による XRDパターン,
および Rietveld 解析結果
図9:粉末化 PZT 薄膜の結晶相の比較

ていることを示す結果が得られた.B サイトに位置
する Zr および Ti 原子については、Ti 原子のみ
4%の若干量 A サイトに進入していた.Rietveld 解
析の結果得られた,PZT 薄膜の応力を除去した
intrinsic な構造を図10に示す.この結果に対して,
過剰な Pb が偏析もしくはアモルファス的に分散さ
れて存在すると仮定し Pb/(Zr+Ti)/O=1/1/3 として
Reitveld 解析を行った場合は収束が悪くまた組成
分析で明らかとなった.過剰な鉛原子の存在場所
として,XRD測定により Pb もしくは PbO としてのピ
ークが見られない,更に欠陥等にアモルファス状
に存在することについては,XRD 測定において
アモルファス材料特有の低角度側にブロードなハ
ローパターンが見られないことからも,Pb がB サイ
トに侵入して存在することが妥当であると考えられ
る.Zr/Ti=57/43 組成の PZT 薄膜においても同様
の評価を行った結果,B サイトに過剰な Pb が大き
く侵入し,更にこの組成においては結晶構造も応
力を除去した状態でも正方晶の構造を保っている
ことが報告されている[5]. 4.3 結晶構造の温度依存性 次に,粉末化 PZT薄膜を低温から高温へと加熱し,その際の結晶構
造変化について調べた.図11に粉末化した PZT薄膜の格子体積,結晶角,および B サイト Pb およ
び A サイト Zr/Ti の各占有率についての温度依存
性を示す.図より、形成した PZT 薄膜の体積は
600K の温度において変化していることがわかる。 結晶角αについては500K以上では収束が悪くな
るが、低温から外挿した曲線が 90°と交わる点は
やはり 600K であり,この点において R3m から
Pm3m へと相転移したことがわかる.この温度はバ
ルクの相転移点よりも若干低い温度であり,Pb 原
子の B サイトへの侵入等,バルクと異なる結晶構
造が原因と考えられる. 4.4 PZT 薄膜の結晶構造の特異性 今回の評価
によってスパッタ法で形成したエピタキシャル PZT薄膜の intrinsic な結晶構造がこのようなバルクと異なる理由として,以下の原因が考えられる.まず,薄膜の堆
積初期段階において,通常菱面体晶を示す材料が2次元的に平坦な基板上に付着し成長する際にひずみが
生じ,そのひずんだ構造において最も安定な状態で薄膜が形成されることになる.そのため,バルクと異なる
特異な構造が薄膜材料の本来的な結晶構造として形作られると推測される. もう一つの理由として,スパッタ法によるプラズマを用いた成膜技術の影響が考えられる.ターゲットからスパ
ッタされた粒子は熱エネルギーよりも大きな運動エネルギーを有し,基板に到達して堆積する際にはいわば局
所的な急熱・急冷過程を経て結晶化することになる.そのため PVD に属するスパッタ法やレーザアブレーショ
ン法は,ゾルゲル法や熱 CVD といった熱平衡的な反応が支配的な成膜プロセスと比較して,基板上に形成し
た薄膜の結晶ひずみが顕著にみられることが報告されている.以上の薄膜材料の持つ本来的な要因によりバ
ルク材料と大きく異なる構造を有しており,単に基板拘束による外来的な要因のみで薄膜材料の結晶構造の
図10:応力を除去した PZT 薄膜の intrinsic な結晶構
造
図11:粉末化 PZT 薄膜の結晶構造の温度依存性 (a)格子体積,(b)結晶角,(c)サイト占有率
第4章 研究成果報告

変形が生じているのではないことがわかる.つまり,圧電特性を始めとする薄膜材料の特性の特異性は,基板
応力に起因した変形以外に薄膜プロセスに起因した構造の特異性に原因があると考えられる.
5. まとめ 本研究では,MEMS デバイスで注目されている機能性薄膜材料について,その特性と結晶構造との関係を
明らかにし,バルク材料との特性の相違について,基板の存在による内部応力以外に応力を解放した状態で
の薄膜の結晶構造もバルクと異なる性質を有していることを明らかにした.そのため,薄膜材料の機能性を考
える場合,出発点としてはバルク材料の特性を基準とするのではなく,応力を解放した薄膜材料自身の構造を
出発点として薄膜材料の特性を評価する必要がある.
参考文献
[1] I. Kanno, H. Kotera, K. Wasa, T. Matsunaga, T. Kamada, R. Takayama, Anomalous Crystalline Structure of Epitaxial Pb(Zr,Ti)O3 Films Grown on (100)Pt/(100)MgO by RF-Magnetron Sputtering, J. Kore. Phys. Soc., 42 (2003) S1317 [2] B. Jaffe, W.R. Cook., H. Jaffe, Piezoelectric ceramics, Academic, London 136 (1971) [3] I. Kanno, H. Kotera, K. Wasa, T. Matsunaga, T. Kamada., R. Takayama, Crystallographic characterization of epitaxial Pb(Zr,Ti)O3 films with different Zr/Ti ratio grown by radio-frequency-magnetron sputtering, J. Appl. Phys. 93, (2003)4091 [4] I. Kanno, H. Kotera, T. Matsunaga, K. Wasa, Intrinsic crystalline structure of epitaxial Pb(Zr,Ti)O3 thin films, J. Appl. Phys., to be published [5] T. Matsunaga, T. Hosokawa, Y. Umetani, R. Takayama., I. Kanno, Structural investigation of Pby(Zr0.57Ti0.43)2-yO3 films deposited on Pt(001)/MgO(001) substrates by rf sputtering, Phys. Rev., B Condens. Matter 66, (2002) 064102

PDP 保護膜材料開発に関する研究
工学研究科精密工学専攻 田中 義和
Abstract: Since Alternating current plasma display panels (ac PDPs) was introduced into the market in 1990’s, the protective layer is one of key factor of ac PDPs performance.The main roles of the protective layer in acPDPs are to protect electrodes from the ion bombardment and to supply secondary electrons to the discharge space. High insulation and high transparency are required to protective layer also.MgO has been used for the protective layer.The improvement of the deposition condition and the composite materials based on MgO or other Alkaline earth metal oxides have been investigated in order to obtain better feature for the protective layer.In this investigation, ZnO was selected as the additives.MgO composites were deposited on the Si and the carbon substrate by electron beam deposition method.The surfaces were characterized by Atomic Force Microscopy (AFM). Secondary electron emissivity (γ) of the films were investigated by the secondary electron emission analyzer.The composition of the films was measured using Rutherford backscattering spectroscopy (RBS). Key words: plasma display panel, protective layer, ion-induced secondary electron emissivity
1. はじめに
AC 型プラズマディスプレイパネル(acPDP)は 40 インチ以上の大型パネル市場で大きなシェアを持っている.acPDPでは前面パネル上に透明電極が配置され電極を覆う形で誘電体層形成されている.この誘電体層は保護膜で覆われており保護膜はセル空間に露出し
ている.保護膜の役割は電極及び誘電体層をイオンの衝突から保護すること,及びイオ
ンが保護膜に衝突したさいに二次電子をセル空間に放出することである.セル空間に放
出された二次電子は,放電開始電圧及び放電維持電圧を下げる役割を果たす 1,2,3).それ故,
保護膜には高い耐スパッタ性,高いイオン衝撃二次電子放出比 γ,高い絶縁性,高い透過率が求められている 1,2,4). 中でもイオン衝撃二次電子放出比 γは acPDPの欠点である発光効率の改善に関与しているため重要とされている.保護膜の材質には現在のところ酸化
マグネシウム(MgO)が最も適しているとされている.近年 PDPの発光効率は向上してきているが、画面サイズは大型化傾向にあり一層の省エネルギー化を求められている為,保護
膜の改善は不可欠である.MgO薄膜のイオン衝撃二次電子放出比 γに関する研究結果より,イオン衝撃二次電子放出比 γ は結晶方向や表面形状 , 表面組成に依存するとされている 6) .
一方,高いイオン衝撃二次電子放出比 γを持つ保護膜の開発のため,MgOへ酸化物などを添加する試みもなされており,絶縁膜のバンドギャップが二次電子放出の特性に影響を
及ぼすことが報告されている 5,7,8,9,10) .MgO混合材料を蒸着材料とした場合,添加剤の種類・濃度といった要因が新たに加わることで,イオン衝撃二次電子放出比 γ の向上に可能性が広がると考えられる. 本研究では MgOを主成分とする混合物の薄膜作成し,二次電子放出比 γと表面の形状・
添加物の濃度に相関があるかを調べた.まず蒸着材料として MgO にバンドギャップが
3.4eV と低い酸化亜鉛(ZnO)を加えたものを、濃度を変え 3 種類作成した.次にこの蒸着材料を用いて電子ビーム蒸着法で成膜を行った.電子ビーム蒸着法の特徴は高融点酸
化物を蒸着でき , またその蒸着速度が速いことである. この特徴から 500nm 以上の厚みを持つ MgO 保護膜の成膜方法としてパネルの生産で使用されている.作成した薄膜はラザフォード後方散乱法(RBS)にて組成を , 原子間力顕微鏡(AFM)にて表面形状を , 二次電子放出比測定装置でイオン衝撃二次電子放出比 γ を測定した.
第4章 研究成果報告

2. 薄膜試料の調整及び評価
2.1 薄膜試料の調整 それぞれ純度 99.9%以上の MgO 粉末と ZnO 粉末を用い混合した.混合割合は,酸化物の金属イオン中に Znが 0.1at.%,0.5at.%,1.0at.%となるよう ZnOを加えた.混合材料を造粒した後、回転式打錠機にて成型を行った.成型物は大気雰囲気下に
おいて 1400℃以上で焼結を行い直径約 5mm,厚さ約 2mmの円盤状の蒸着材料を得た.作成した焼結物の密度は計算より求めたバルク密度に対して 85%以上であった.尚,試作した蒸着材のサイズは市場で試験されているものとほぼ同等である.製膜は電子ビーム
蒸着法によりおこなった.本研究では製膜中に酸素導入のみ,500eV の酸素イオンを用いて IBAD(Ion Beam Assist Deposition)を行う,及び左記条件の IBAD とチャンバー内温度を230℃まで加熱を同時に行うの 3 方法を用い膜の改質を図った.他の製膜条件は,製膜時チャンバー内圧力 :3.2×10-2Pa,膜厚 :300nmとした.酸素導入量は 8CCMとし IBADではこれを ECR タイプのイオン源にてイオン化してチャンバー内に導入した.基板には Si(100)及びカーボン基板を用いた.Si 基板は蒸着前にアセトンを溶剤として超音波洗浄を行った.製膜した Si 基板は 400℃で 2 時間アニール処理を行なった. 2.2.評価 薄膜の物性評価は,組成分析,表面形状測定及び二次電子放出比 γ測定の 3項目で行った.先ず組成分析にはラザフォード後方散乱法 (RBS) を用いた.イオン種はHe2+,ビームエネルギーは 2.0MeV 及び 2.7MeV とした.表面形状は,原子間力顕微鏡 (AFM) を用いタッピングモードで測定した.そこから平均二乗粗さ(RMS 粗さ)を求めた表面形状の指数とした. 次に二次電子放出比測定装置でイオン衝撃二次電子放出比 γを測定した.二次電子放出比測定装置はイオン衝撃二次電子放出比 γの測定には新たに開発した二次電子放出比測定装置を用いた.装置のイオン源にはアルバックファイ株式会
社のスパッタイオンガン(MODEL UGS-3)を使用し,Ar イオンを 1kV で加速したものを試料に照射した.測定時のチャンバー内の圧力は 1.0×10-2Pa とした.
3. 測定結果
電子ビーム蒸着法では物質を蒸発させるため、蒸着材料中に融点・昇華点が異なる物質
があると蒸着材料中と膜中でその割合が異なるという欠点がある.そこでラザフォード
後方散乱法(RBS)にて組成調べ表 1 に膜中の Mg と Zn の比を蒸着条件ごとに示した.ZnOは MgOより真空中での昇華点が低く,電子ビーム蒸着を行うと膜中の Znの割合が蒸着材料中よりも多くなると予想される.
分析結果では,蒸着条件が、酸素導入のみ>IBAD>IBAD 及び加熱の順に膜中の Zn 割合が減少している.酸素導入のみよりも IBAD 処理を行った方が Zn 原子の割合が低いのはZn原子が Mg原子に比べスパッタされ易いので製膜中の膜表面より選択的にスパッタされるためと考えられる.次に IBAD に加熱処理を加えた条件で Zn の割合が一番少なくなったのは,以下のように推測する.蒸着材料が蒸発し基板に堆積する際,蒸発している物
質に比べ基板温度が余りにも低いのでその付着は一瞬にして起こる.そのため,各原子
あるいは分子は最適な位置に移動する事が出来ず全体として欠陥の多い結晶性の低い膜
が出来上がる.ところが加熱処理を行うと原子がより良い位置に移動する事が出来ると
されている. つまり基板の加熱を行うとによって非加熱の状態よりも僅かに原子が移動できる時間が
長くなり,その間により多くの Zn 原子がスパッタされることで単に IBAD 処理をしたものよりも Zn の含有量が少なくなる. 膜中の Zn 濃度と γ の関係を図 1 に Zn 濃度と RMS 粗さの関係を図 2 に示した.図 1 より Zn の濃度が 0.2~0.3at/%のとき γ の値にピークが有ることが判明した.同様に図 2 よりZn 濃度 0.5at.%前後で RMS 粗さにピークらしきものが見られる事が分かった.また IBAD

図 2 RMS 粗さと膜中の Zn 濃度の関係
1.5
2.5
3.5
4.5
5.5
0.00 0.50 1.00 1.50Zn/(Mg+Zn) (at/%)
RMS(nm)
Basic condition
IBAD
IBAD+Heat
を行った膜表面は全体的に粗くなる傾向が見られた.次に RMS 粗さと γ の関係を図 3 に示す.すべての蒸着条件で右肩上がりの傾向を見せ,図左下の 1 点を除き RMS 粗さが3.3nm~5.5nmの範囲にある.そこで左下の 1点を除いて最小二乗法により 1次の回帰式を求めた相関係数を使い F 検定による有意差検定を行ったが,片側 5%の水準で有意では無かった.
表 1 膜中の金属(Mg・Zn)に占める Zn の割合 (at.%)
蒸着条件 材料中の
ZnO 濃度(mol%) 酸素導入のみ IBAD IBAD 及び加熱
0.0 - - 0.1 0.217 0.14 0.09 0.5 0.904 0.61 0.35 1.0 1.2 1.42 0.67
4. まとめ
今期は MgO と ZnO の混合物の製膜を行い二次電子放出比 γ の測定を行った.その結果試験を行った範囲では γ の値は膜中の Zn の濃度が 0.2at.%付近で高くなる事が確認された.この様な傾向は本研究室で行われた他の研究でも見られた 11) .また薄膜表面の RMS 粗
図 3 二次電子放出比 γ と RMS 粗さの関係
0.180.210.240.270.300.330.36
2.5 3.5 4.5 5.5RMS (nm)
Gamma
Basic condition
IBAD
IBAD+Heat
図 1 二次電子放出比 γ と膜中の Zn 濃度の関係
0.20
0.23
0.26
0.29
0.32
0.35
0.00 0.50 1.00 1.50
Zn/(Mg+Zn) (at.%)
Gamma
Basic condition
IBAD
IBAD and Heat
第4章 研究成果報告

さが大きくなると二次電子放出比 γ の値も高くなる傾向にあることが確認できた. 二次電子放出比 γ に対する添加物の影響としては 1) 添加物のバンドギャップの影響 2) 添加物による膜の表面粗さ・結晶性等の物理的な変化
の二点が考えられる.このうち添加物のバンドギャップの影響については,特定の濃度
にピークらしきものが見られるので,今回の実験の範囲では添加物単独での作用という
よりは MgO との相互作用が考えられる.また膜の物理的な変化が影響を及ぼしたと仮定すると膜の表面粗さ・結晶性などの内,どの因子の変化が二次電子放出比 γに影響を及ぼしたのかを検討する必要がある. 来期はこの二次電子放出比 γ の増大が何に起因しているかを 1)・2)の両説に沿って調べ
るためバンドギャップの異なる酸化物を添加し二次電子放出比 γの測定を行う.また二次電子放出比 γ 測定器の改良を行い測定制度の向上を図る.具体的には、基板加熱装置取り付け・二次電子コレクタの形状の変更、等を検討中である.
参考文献
1) T.Urade, T.Iemori, M.Osawa, N.Nakayama, and I.Morita, “PROTECTING LAYER FOR DIELECTRIC IN AC PLASMA PANELS”, IEEE Trans Electron Devices, ED-23, (1976), 313-318. 2) S.J.Rho, S.M.Jeong, H.K.Baik, K.M.Song, “The structural, optical and secondary electron emission properties of MgO and Mg-O-Cs thin films prepared by ion beam assisted deposition”, Thin solid Films, 355-356, (1999), 55-59. 3) M. O. Aboelfotoh and J. A. Lorenzen, “INFLUENCE OF SECONDARY-ELECTRON EMISSION FROM MGO SURFACES ON VOLTAGE-BREAKDOWN CURVES IN PENNING MIXTURES FOR INSULATED-ELECTRODE DISCHARGES”, J. Appl. Phys., 48, (1977), 4754-4759. 4) H. Uchiike, K. Miura, N. Nakayama, T. Shinoda, and Y. Fukushima, “SECONDARY-ELECTRON EMISSION CHARACTERISTICS OF DIELECTRIC MATERIALS IN AC-OPERATED PLASMA DISPLAY PANELS”, IEEE Trans Electron Devices, ED-23, (1976), 1211-1217. 5) N. Yasui, H. Nomura, Ali. Ide, “Characteristics of ion beam modified magnesium oxide films”, Thin Solid Films 447-448, (2004), 377-382. 6) J. Cho, R. Kim, K. W. Lee, G. Y. Yeom, J. Y. Kim, J. W. Park, “Effect of CaO addition on the firing voltage of MgO films in AC plasma display panels”, Thin Solid Films, 350, (1999), 173-177. 7) H. D. Hagstrum, “Theory of Auger Neutralization of Ions at the surface of a Diamond-Type Semiconductor”, Phys. Rev. , 122, (1961),83-113. 8) K. S. Moon, J. W. Lee, K. W. Whang, “Electron ejection from MgO thin films by low energy noble gas ions: Energy dependence and initial instability of the secondary electron emission coefficient”, J. Appl. Phys., 86, (1999), 4049-4051. 9) Y. T. Matulevich, T. J. Vink, P. A. Z. van Emmicchoven, “Low-energy ion-induced electron emission from a MgO(100) thin film: The role of the MgO-substrate interface”,Phys. Rev. Lett., 89, (2002),167601. 10) Y. Motoyama, H. Matsuzaki, H. Murakami, “A study of the secondary electron yield gamma of insulator cathodes for plasma display panels”,IEEE. T. Electron. Dev. , 48, (2001),1568-1574. 11) 村上茂人 , 井手亜利,他 “MgO-NiO 複合材料薄膜の二次電子放出比の測定”,日本機械学会関西支部第 80 期定期総会講演会予稿集(2005) , 9-23-24

Correlation between fracture criteria for interface crack initiation and propagation: an atomistic simulation
工学研究科機械物理工学専攻 Fulin SHANG
Abstract: We performed atomistic simulations to study the correlations between fracture criteria for the onset of crack initiation at the interface edges and that of crack propagation along the interface. Three sets of simulation are considered, i.e., two interface edges with geometries of 90°/90° and 90°/180° angles, and one interface crack. Classical molecular dynamics (MD) method is employed to examine the fracture behaviors near the apexes of the interface edges and near the tip of the interface crack, and the boundary conditions of the MD simulation cells are prescribed by the displacement fields according to the solutions of continuum elasticity theories. The simulation results show that the maximum stresses reach the ideal strength of the interface for all three cases, at the moment of the onset of fracture, and the fracture interface energies are prescribed by the intrinsic property of the interface material. From these findings, we revealed that the different fracture criteria for crack initiation at the interface edges and that for crack propagation along the interface can be correlated and unified through either the ideal strength or the fracture energy of the interface. Key words: Fracture criterion, Interface crack, Interface edge, Atomistic simulation, Molecular dynamics
1. INTRODUCTION
Fracture criterion has long been one of key issues in fracture mechanics theory. For a pre-existing crack in brittle materials, either stress-intensity factor K or energy release rate G is well accepted to establish a basic criterion for fracture. When treating interface crack problems in composite structures and bi-materials, a variety of fracture criteria have been developed in the literature based on the concept of energy release rate [1], strain energy density [2], maximum tangential stress, or stress-intensity factor. Also, an elliptical form of fracture curve was proposed to fit the experimental results for mixed mode interface crack.
Besides the interface crack between dissimilar materials, interface edge problem has been investigated extensively, since interfaces are susceptible to debonding or delamination in the processing or in service. The delamination often initiates at the intersection of the interface and a free surface, in this work we call this geometry configuration the interface edge, and this failure mechanism occurs in various thin film/substrate systems [3]. In order to estimate the interface toughness for crack initiation at the free edge along the interface in thin film/substrate systems, several recent studies [4], [5] adopted a delamination criterion in terms of stress intensity parameter Kd, which characterizes the magnitude of the stresses in the vicinity of the apex of an interface edge in a linear elastic bi-material. For example, when the normal stress along the interface is written as
δσ −= 1rKd
zz . (1)
Then a critical condition for the delamination occurring at the interface edge is given by
dcd KK = , (2)
which is in spirit analogous to K-factor criterion in linear elastic fracture mechanics. Thus, for a given material system under external loadings, crack could initiate at the interface edge, which is
governed by the criterion using the stress intensity parameter Kd; and once the crack is generated along the interface, it will possibly propagate along the interface, and this process would rather obey the criterion based on the stress intensity factor K. One obvious challenge presented here is that the singularity orders in stress field change to 0.5 from a different value after the generation of the interface crack, and then Kd and K differ in dimensions. Therefore, these two governing parameters cannot be compared directly each other, although they describe the similar fracture behaviors of materials.
第4章 研究成果報告

From the fundamental viewpoint of the physical phenomena taken place during the above fracture process of the interface crack and the interface edge, both involve the breaking of atomic bonds along the interfaces that hold atoms together. Therefore, we have a belief that the fracture criterion for crack initiation at the interface edge and the criterion for crack propagation along the interface could be correlated and unified. This is the topic of this work. To facilitate this study, we employ the tool of atomistic simulation using molecular dynamics (MD) method, with simple pairwise Morse potentials defining our “model” bi-material. Further, attention is directed to purely brittle fracture, i.e., no nucleation and motion of dislocations.
2. SIMULATION METHOD
The atomistic simulations of interface cracking in our “model” bi-materials are carried out using a molecular dynamics technique. Morse interatomic potential is used to describe the interaction between atoms,
]2[)( )()(2 00 rrrrij
ijij eeDr −−−− −=Φ αα , (3)
whereΦ is a pair interaction between atoms i and j whose separation is given by rij, D, α and r0 are the potential parameters. To introduce an interface between two dissimilar materials, say material 1 and material 2, with relatively weak bonding, a combination rule for the interactions between materials 1 and 2 is adopted as follows,
212110
112 )( DDD = , )( 212
112 ααα += , 12
2121012 2ln)( αλλ +=r , 2,1 ,2ln0 =−= ir iii αλ . (4)
Two materials have fcc crystalline structures with equilibrium lattice parameter a0=0.3607 nm; The Morse potential parameters adopted in our simulations are listed in Table 1, as well as the calculated elastic constants Cij of the two materials. Further, the cutoff distance for the Morse potential is set to be 1 nm.
Three sets of simulations are considered in this work, and the simulation models are shown in Fig. 1: (a) interface edge 1, with angles 90° to the joint interface for both materials 1 and 2; (b) interface edge 2, which has an arrangement of non-equal angles 90°/180°; (c) interface crack with an initial crack of length a.
Finite element method (FEM) elastic fields are used to describe the deformation fields far from the crack tip and the apexes of the interface edges. Closer to these local regions, MD simulation cells are built in, whose outer boundaries are connected to the FEM regions. And the displacements for the atoms sitting in the boundary areas are prescribed by the elastic solutions for their corresponding interface problems. When the remote loadings are applied to the FEM models, the elastic responses are transferred through these boundary atoms to the MD regions, finally stretching the system of all atoms in the MD simulation cells. The representative MD atomic configurations for the interface edge 1, interface edge 2 and the interface crack are shown in Fig. 2. Initially the atoms are placed at the sites of the regular fcc lattices. Because materials 1 and 2 have same lattice constant, we chose three-dimensional systems of atoms with only one unit cell along the thickness direction, y-direction, by applying periodic boundary condition along this direction. The typical dimensions of these MD cells are 18 nm in x-direction, 0.36 nm in y-direction, and 21.6 nm in z-direction, which consist of 12000 atoms for the interface edge 1 and the interface crack models and 10320 atoms for the interface edge 2. For the interface crack model, initial crack is introduced by annihilating interactions between the atoms across the surface region of the interface, as indicated by the solid line in Fig. 2c. The initial crack tip is located at a distance of 7.24 nm from the left edge of its MD cell. The initial configurations are then relaxed with free boundary conditions in all directions by following molecular dynamics of atoms at zero K. After this initial relaxation, tensile stretching simulations are conducted by prescribing small displacement increments du in the x and z directions on the boundary atoms. These displacement increments are proportional to that according to the FEM solutions. Then, the atomic structures are subsequently relaxed for each increment to reach their equilibrium configurations. This loading/relaxation process is repeated until the fracture takes place. The smaller increments of the displacements are used when approaching final fracture, in order to pick up a relatively precise condition of the onset of the fracture. The equations of motion of atoms are solved on a step-by-step basis using Verlet algorithm, where the time step of 5 fs is used. And the kinetic energies of the atoms

are removed at every 5 steps to maintain the temperature of the systems at zero K.
Material 1
Material 2
36 m
36
m36
m
MD region
10 m
10 m
µ
µ
µ
µµ
interface
load
Material 1
Material 2
36 m
36
m36
m
MD region
10 m
9.995 m
µ
µ
µµ
interface
µ
load
10 mµ
10 mµ Material 1
Material 2
36
m36
mµ
interface
µ
µ36 m
load
MD region
(a) Interface edge 1 (b) Interface edge 2 (c) Interface crack
Fig. 1. Three simulation models
material 1 (6000 atoms)
material 2 (6000 atoms)
10.8
nm
10.8
nm
18.0 nm
y periodicx
z
material 1 (4320 atoms)
material 2 (6000 atoms)
10.8
nm
10.8
nm
18.0 nmy periodic
x
z
material 1 (6000 atoms)
material 2 (6000 atoms)
10.8
nm
10.8
nm
18.0 nm
y periodicx
z
crack
(a) Interface edge 1 (b) Interface edge 2 (c) Interface crack Fig. 2. The representative MD atomic configurations for three interface models
Table 1. Morse potential parameters and elastic constants of the materials
D (eV) α (1/nm) r0 (nm) C11 (GPa) C12, C44 (GPa) Material 1 0.3429 13.5880 0.2866 173.947 122.635 Material 2 0.7395 15.6326 0.2751 432.093 291.158 Interface 0.05036 14.6103 0.2806
3. IDEAL STRENGTH AND FRACTURE ENERGY OF INTERFACE
We first performed MD simulations to calculate the ideal strength and the fracture energy of the interface between materials 1 and 2. The ideal strength of the interface is derived using a simulation system of size a0 ×a0× 12a0, which consists of 24 atoms for each of the materials 1 and 2, respectively. Periodic boundary conditions are assumed in x and y directions. A load is applied to the top layer of the material 1, while the bottom layer of the material 2 is fixed. The load is increased until the unstable deformation of the atomic structure takes place. We checked the instability of this simulation system under different loading conditions, including: (1) uniaxial tension; (2) pure shear; and (3) combined mixed mode cases. The simulation results suggested that the ideal strength nearly could be expressed by a linear curve,
117.356.5
=+ xzzz σσ . (5)
The fracture energy of the interface is calculated next. Figure 3 explains schematically how we define the fracture energy of the interface. And the fracture energy per unit interface area A is given by,
AUUUE )( 2112fracturei, −−= . (6)
第4章 研究成果報告

The calculated fracture energy of the interface between the materials 1 and 2 is 6.57 J/m2.
����
����
����
U1 2U
periodic boundary bulk material region
A A A
(c)(b)(a) U12
interface
material 1
interface
material 2
material 1
material 1
surface/interface
material 2 material 2
interface
Fig. 3. Schematic diagram explaining the definition of the fracture energy of the interface
4. INTERFACE EDGES AND INTERFACE CRACK SIMULATIONS
To discuss the fracture of the atomic systems of the three interface models, in this work, we propose a definition of crack initiation and crack propagation as follows,
(1) The apex of an interface edge or the tip of an interface crack is associated with the position of the maximum stress; and
(2) The onset of crack initiation at the interface edge or crack propagation of the interface crack occurs when the maximum stress reaches its highest level and starts decreasing. 4.1. INTERFACE EDGE 1
During stretching the simulation cell by applying the FEM displacements to the boundary atoms stepwise with an increment du, we observed that the atomic system deformed without apparent change in configuration, except the region near the left apex of the interface when approaching du=31. Employing the above definition for fracture, a crack is determined to have initiated at du=31. The stress distributions along the interface at this critical step are displayed in Fig. 4, together with the stress results before and after this step. The calculated fracture interface energies at the apex of the interface edge is 4.71 J/m2, which is lower than the fracture energy of the interface 6.57 J/m2 obtained in Section 3. At other regions of the interface away from the apex, the fracture interface energies are no smaller than 6.70 J/m2. These results also suggest that, by judging from the cohesive interface energy, the interface starts debonding from the apex of the interface edge, and a crack has just generated at the apex.
σ zz
du=32
du=30
du=31
du=28
Distance from the apex of interface edge, nm
, GPa
3
3.5
4
4.5
5
5.5
6
0 2 4 6 8 10
Fig. 4. Stress distributions along the interface for the interface edge 1
4.2. INTERFACE EDGE 2
The simulation cell of the interface edge 2 has a different geometry, i.e., the materials 1 and 2 form an interface by a combination of 90°/180° angles. The apex is located at a distance of around 5.05 nm from the left free edge of the material 2 part of the cell.
From the simulation results of stress distributions, crack initiation is determined to occur at the step of displacement increment du=20. The normal stress distribution near the apex of the interface edge is shown in Fig. 5.

The fracture interface energies at the apex is 5.07 J/m2, while that of other interface regions ahead of this apex are no lower than 6.77 J/m2.
du=17
du=19
du=20
σzz
, GPa
du=22
Distance from the apex of interface edge, nm
du=21
2
2.5
3
3.5
4
4.5
5
5 6 7 8 9 10
Fig. 5. Stress distributions along the interface for the interface edge 2
4.3. INTERFACE CRACK
According to the definition for fracture, the initial interface crack began to propagate when the cell was loaded with du=0.82. When loaded further with du=0.83 a new crack tip was formed at a distance of 7.60 nm from the left edge of the cell, i.e., the crack advanced one lattice spacing between the two steps. Figure 6 shows the stress distributions along the whole interface near du=0.82 behind and ahead of the initial crack tip. The calculated fracture interface energy at the initial crack tip is 6.02 J/m2 and the energies ahead of the tip are larger than 6.88 J/m2, i.e., the interface crack starts to propagate at du=0.82.
σ, G
Pazz
Distance from the left edge of interface, nm
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
5 6 7 8 9 10 11
du=0.81
du=0.82
du=0.83
du=0.85du=0.79
Fig. 6. The stress distributions along the interface for the interface crack
5. CORRELATIONS BETWEEN FRACTURE CRITERIA
Figure 7 shows the comparisons of the maximum stresses along the interfaces at the onset of fracture with the ideal strength of the interface. It is clearly seen that the maximum stresses for the three cases fall nicely into the curve that represents the ideal strength of the interface. Thus, the onsets of the fracture at the interface edges and along the interface are both controlled by the ideal strength of the interface, a linear function of the normal and shear stresses of the interface, eq. (5). Further, we look at the comparisons of the fracture interface energies for the three interface models to the fracture energy of the interface, Ei, fracture. It is seen from Fig. 8 that, at the onset of fracture, both the apexes of the two interface edges and the tip of interface crack are held with an interface energy that is lower than Ei, fracture, while the interface regions just adjacent to these apexes or tip are still held with the cohesive interface energies that are over Ei, fracture. Using the interface energy, the critical conditions for fracture of the interface edges and the interface crack can be given by one relation such as,
fracturei,ii )crack interface(or )edge interface( EEE ≤ . (7)
Through this relation, the fracture criterion for crack initiation at the interface edges and that for crack propagation along the interface are also correlated and unified.
第4章 研究成果報告

σzz, GPa
interface crack
interface edge 2
linear ruleσxz
, GPa
interface edge 1
0
0.5
1
1.5
2
2.5
3
3.5
0 1 2 3 4 5 6
Fig. 7. Comparisons of the maximum stresses for the three interface models with the ideal strength of the interface
6.57 J/m
interface edge 1
apex
crack tip
interface crack
apex
interface edge 2
Distance, nm
2Fr
actu
re in
terf
ace
ener
gy, J
/m
2
0
1
2
3
4
5
6
7
8
9
10
0 2 4 6 8 10 12 14 16 18
Fig. 8. Comparisons of the fracture interface energies for the three interface models with Ei, fracture
6. CONCLUSION
Through atomistic simulations, we revealed the correlations between fracture criteria for the onset of crack initiation at the interface edges and that of crack propagation along the interface. The simulation results show that the maximum stresses reach the ideal strength of the interface for all cases, at the onset of fracture. Further, the fracture interface energies for all cases are prescribed by the intrinsic property of the interface material. The different fracture criteria for crack initiation at the interface edges and that for crack propagation along the interface could then be correlated and unified through either the ideal strength or the fracture energy of the interface, and the onset of fracture is actually controlled by the maximum stresses or the cohesive interface energy. REFERENCES [1] He, M.Y., Hutchinson, J.W., Kinking of a crack out of an interface, J. Appl. Mech. 56 (1989), 270-278. [2] Sun, C.T., Jih, C.J., On strain energy release rate for interfacial cracks in bimetal media, Engng. Fract. Mech. 28
(1987), 13-20. [3] Evans, A.G., Hutchinson, J.W., The thermo-mechanical integrity of thin films and multilayers, Acta Metal.
Mater. 43 (1995), 2507–2530. [4] Kitamura, T., Shibutani, T., Ueno, T, Crack initiation at free edge of interface between thin films in advanced
LSI, Engng. Fract. Mech. 69 (2002), 1289–1299. [5] Shang, F., Kitamura, T., Hirakata, H., Kanno, I., Kotera, H., Terada, K., Experimental and theoretical
investigations of delamination at free edge of interface between piezoelectric thin films on a substrate, Int. J. Solids Struct. 42 (2005), 1729-1741.
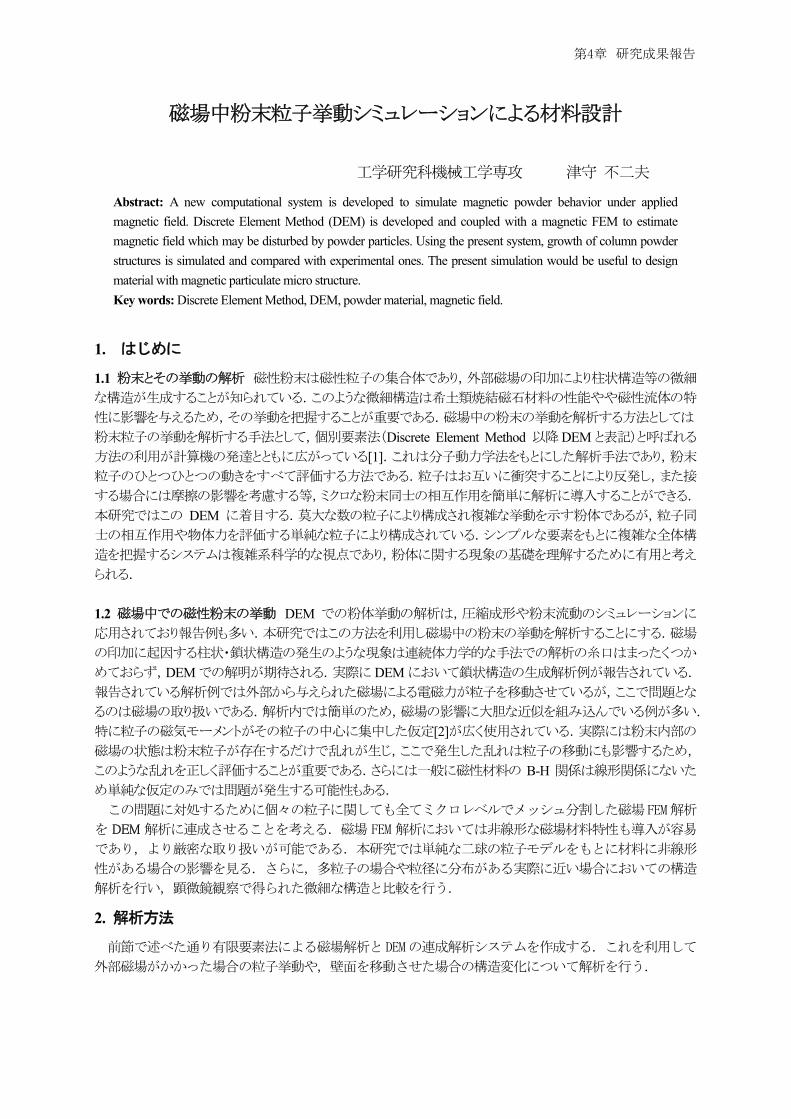
磁場中粉末粒子挙動シミュレーションによる材料設計
工学研究科機械工学専攻 津守 不二夫
Abstract: A new computational system is developed to simulate magnetic powder behavior under applied magnetic field. Discrete Element Method (DEM) is developed and coupled with a magnetic FEM to estimate magnetic field which may be disturbed by powder particles. Using the present system, growth of column powder structures is simulated and compared with experimental ones. The present simulation would be useful to design material with magnetic particulate micro structure. Key words: Discrete Element Method, DEM, powder material, magnetic field.
1. はじめに
1.1 粉末とその挙動の解析 磁性粉末は磁性粒子の集合体であり,外部磁場の印加により柱状構造等の微細
な構造が生成することが知られている.このような微細構造は希土類焼結磁石材料の性能やや磁性流体の特
性に影響を与えるため,その挙動を把握することが重要である.磁場中の粉末の挙動を解析する方法としては 粉末粒子の挙動を解析する手法として,個別要素法(Discrete Element Method 以降 DEM と表記)と呼ばれる
方法の利用が計算機の発達とともに広がっている[1].これは分子動力学法をもとにした解析手法であり,粉末
粒子のひとつひとつの動きをすべて評価する方法である.粒子はお互いに衝突することにより反発し,また接
する場合には摩擦の影響を考慮する等,ミクロな粉末同士の相互作用を簡単に解析に導入することができる.
本研究ではこの DEM に着目する.莫大な数の粒子により構成され複雑な挙動を示す粉体であるが,粒子同
士の相互作用や物体力を評価する単純な粒子により構成されている.シンプルな要素をもとに複雑な全体構
造を把握するシステムは複雑系科学的な視点であり,粉体に関する現象の基礎を理解するために有用と考え
られる.
1.2 磁場中での磁性粉末の挙動 DEM での粉体挙動の解析は,圧縮成形や粉末流動のシミュレーションに
応用されており報告例も多い.本研究ではこの方法を利用し磁場中の粉末の挙動を解析することにする.磁場
の印加に起因する柱状・鎖状構造の発生のような現象は連続体力学的な手法での解析の糸口はまったくつか
めておらず,DEM での解明が期待される.実際に DEM において鎖状構造の生成解析例が報告されている.
報告されている解析例では外部から与えられた磁場による電磁力が粒子を移動させているが,ここで問題とな
るのは磁場の取り扱いである.解析内では簡単のため,磁場の影響に大胆な近似を組み込んでいる例が多い.
特に粒子の磁気モーメントがその粒子の中心に集中した仮定[2]が広く使用されている.実際には粉末内部の
磁場の状態は粉末粒子が存在するだけで乱れが生じ,ここで発生した乱れは粒子の移動にも影響するため,
このような乱れを正しく評価することが重要である.さらには一般に磁性材料の B-H 関係は線形関係にないた
め単純な仮定のみでは問題が発生する可能性もある. この問題に対処するために個々の粒子に関しても全てミクロレベルでメッシュ分割した磁場FEM解析
を DEM 解析に連成させることを考える.磁場 FEM 解析においては非線形な磁場材料特性も導入が容易
であり,より厳密な取り扱いが可能である.本研究では単純な二球の粒子モデルをもとに材料に非線形
性がある場合の影響を見る.さらに,多粒子の場合や粒径に分布がある実際に近い場合においての構造
解析を行い,顕微鏡観察で得られた微細な構造と比較を行う.
2. 解析方法
前節で述べた通り有限要素法による磁場解析とDEMの連成解析システムを作成する.これを利用して
外部磁場がかかった場合の粒子挙動や,壁面を移動させた場合の構造変化について解析を行う.
第4章 研究成果報告

2.1 連成方法 解析においては磁場中成形プロセスを微小なタイムステップに分け,そのタイムステップごとの
粒子の加速度・速度・位置を追跡することにより各粒子の状態の時間履歴を得る.まず,各タイムステップにお
いて有限要素法による磁場解析を行い,個々の粒子に作用する電磁的な力を求める.この力をDEMに取り込
むことにより粒子個別要素法と有限要素磁場解析法の連成を行う.DEM での粒子位置を導出する際には発散
を防ぐため有限要素解析の 1 ステップに対し,DEM では 1000 ステップと十分に小さい 1000 倍の時間分割を
行った.
2.2 有限要素磁場解析 本研究では,磁場解析ソフト FEMM を用いて,有限要素磁場解析を行う.これにより,
解析領域各要素での磁場の向き,磁束密度,各粒子にかかる力及びポテンシャルエネルギーを算出する.
FEMM における磁場解析では A をベクトルポテンシャルとして,以下に示すラプラスの方程式
02
2
2
22 =
∂
∂+
∂
∂=∇
yA
xAA (1)
を支配方程式とする.ある要素pにおけるベクトルポテンシャルを,
yxA 210 ααα ++= (2)
と近似する. 0α , 1α , 2α は係数である.このときの残差をrとして,式(1)は
ry
Ax
AA =∂
∂+
∂
∂=∇
2
2
2
22 (3)
となる.この誤差rが最小となるような各要素におけるベクトルポテンシャルAを求め,ここから磁束
B を求め,各要素の持つエネルギーが導出される.さらに Maxwell の応力テンソルから各要素に働く力
を求めることができる. 2.3 粒子個別要素法 本研究においては磁性粒子の挙動を解析するための最も簡単な粒子モデルとして二
次元円粒子モデルを用いた.粒子の回転および摩擦は無視し,磁場解析によって得られた電磁気的な力およ
び Hertz の弾性反発力,空気抵抗のみを考慮した解析を行う.
3. 解析結果及び考察
3.1 二球粒子解析 もっとも単純なモデルとし
て二球粒子が存在する場合の相互の引力の解析
例を示す.空間内に半径 1μm の二粒子を配置し,
二粒子に平行した外部磁場をかけた場合の引力
を磁場 FEM を用いて導出する.粒子は純鉄とし,
材料モデルとしては磁場印加による磁束密度の
飽和を考慮しない線形磁化モデルと磁束密度の
飽和を考慮する非線形磁化モデルの両方で解析
を行った.解析で利用した純鉄の B-H 曲線を図1
に示す.線形モデルではこの B-H 曲線の初期の
直線部分を延長した直線を B-H 曲線として用いて
いる.図2 (a)(b) は空間内の平均磁束密度がそれぞれ0.1T,1Tになるように外部磁場としてをかけた際の,二
粒子間に働く引力を粒子間距離に対してプロットしたものである.各図における 2 種のデータはそれぞれ線形
モデル・非線形モデルの違いである.この結果を見ると,まず,磁場の大きさによって,引力の大きさが明らか
に異なることが分かる.そして,いずれの場合も粒子間距離を近づけると引力が増加し,粒子中心間距離が 2μm の点すなわち二球が接触する点で急激に増加することが確認される.特に線形モデルの場合は接触点
0
0.5
1
1.5
2
2.5
3
0 100000 200000 300000 400000
Mag
netic
flux
den
sity
[T]
Magnetizing field [A/m]
図1 非線形磁性材料モデル(純鉄)

で引力が発散している.従来のモデルと本研究のモデルでは球粒子と2次元円形状粒子を扱っているため直
接に数値の比較はできないものの,粒子中心部に無限小磁気双極子を設置した従来のモデル[2]では,数式
的に評価した場合,このような急激な引力の増大は粒子の接触時ではなく,二粒子の中心が接触するという仮
想的な場合にのみ発生する.特に粒子同士の衝突するような近接状態を解析する場合には,この違いが大き
く影響すると考えられる. また,外部磁場を大きく(平均磁束密度1T)した場合,磁束密度の飽和を考慮した非線形モデルでは線形モ
デルとの差が大きいことが確認される.図3に二球粒子の接触している場合の磁束密度分布を示す.図3(a)(b)はそれぞれ線形および非線形の B-H 曲線を用いた場合の結果である.(a)の線形モデルの場合,粒子接点付
近では飽和磁束密度を超えた非常に大きな磁束密度となっていることが確認される.非線形モデルでは磁束
の集中は起こるものの,接蝕部で飽和した磁束は粒子外部へと流出するため,粒子内のほとんどの領域では
2T 以下となっている.そのため,図2(b)に示すように飽和しないモデルの場合には,引力が過大に計算されて
いるのに対して,飽和磁束密度モデルにおける引力はより小さく,妥当な値として計算されていると考えられる.
このような効果は単純なモデルでは評価できず,従来法では不可能であったものである.なお,ここで図には
示していないが,非線形モデルを用いて平均 0.1T の磁場を印加した 2 個粒子接触の場合の磁束密度分布に
おいても接触部付近で磁束の飽和が発生する.ただし,飽和部分は 1T の場合と比較するとごく限られた部分
となり,そのため図2(a)のように線形モデルと飽和モデルの結果が近いものとなっている. 3.2 粒子群挙動解析 図4は 200μm×200μm の空間に平均粒径3μm で粒径分布をもたせた鉄粒子を 400個配置し,平均 1T の外部磁場を加えた場合の粒子の挙動である.粒子は初期状態で細い単鎖状の構造を作
る.時間の進展とともに徐々に単鎖構造は数本ずつ合体し柱状構造へと移行していく.このケースでは柱状構
造は4本で最終的に安定した状態となった.このような太さをもった柱状構造は,これまでの解析では再現され
ていないものである.図5は紙面に平行に設置された 2 枚のガラス板間の粒子群に垂直な磁場をかけた場合
の構造の光学顕微鏡写真である.解析結果と同様の柱状構造が生成していることが確認できる.また,解析に
lenear model
non-lenear model
(b) 1T
-2.0
0.0
2.0
4.0
6.0
8.0
10.0
1 2 3 4 5 6
Distance between center of two particles (μm)
linear model
non-linear model
Attr
activ
e for
ce (μ
N)
-0.02
0.00
0.02
0.04
0.06
0.08
0.10
1 2 3 4 5 6
linear model
non-linear model
(a) 0.1T
Attr
activ
e for
ce (μ
N)
Distance between center of two particles (μm)
(b) Material with non-linear B-H relation
1T
1T
(a) Material with linear B-H relation
0.0 T
8.0 T
図2 磁場中二球粒子間の距離と引力の関係 図3 磁場中二球粒子の磁束密度分布
第4章 研究成果報告

おいても実験においても各柱構造の端部においてブラ
シ状に枝分かれした構造が確認された.これは柱構造の
末端部には磁極が発生するため,同極同士での反発が
起こっていることが原因である. 本解析での粒子初期配置状態は規則的なものである
が,磁場印加後ごく初期の段階で規則構造は崩れている
ため,初期状態としてランダムな配置の場合と最終状態
は変化しない.また,現実の粉末には凝集塊の影響もあ
るが,そのような影響を考慮するには,初期配置のみなら
ず摩擦や付着力といった粒子間の影響も考慮していく必
要があると考えられる.
4. 結言
磁場中粒子の挙動を解析するため,有限要素磁場解
析および粒子個別要素法を連成させた新たなシステムにより,従来法では十分評価できなかった磁場の
影響を正確に表現できることが確認された.再現した柱状構造のエネルギー安定性についても別報にて
報告済みである[3]. このシステムを用いることにより,外部磁場を働かせて機能的に作用する微細構造を有する材料の開
発といった応用が可能である.具体的には弾性樹脂中に構造を生成することにより微細なアクチュエー
タを作製することを考えている.
参考文献
[1] Cundall, P. A and Strack, O.D.L , “A discrete numerical model for granular assemblies”, Geotechnique, 29 (1979) 47-65. [2] R.S. Paranjpe : “Stability of chains of permeable spherical beads in an applied magnetic field”, J. Appl. Phys. 60-1(1986) 418-422. [3] 津守不二夫, 平田正道, 島進: FEM-DEM 連成モデルによる磁場中粒子挙動解析, 粉体および粉末冶
金, 52-3(2005), pp194-198.
図5 平行ガラス板間の磁場中磁性粒子構造
0μs
200μs
25μs
500μs
50μs
800μs
100μs
1000μs
図4 磁場中粒子群の挙動解析例(純鉄 400 粒子)

骨細胞武者修行に関する成果報告
工学研究科機械工学専攻 田中 基嗣
1. はじめに
私は,21 世紀 COE プログラム「動的機能機械システムの数理モデルと設計論」―複雑系の科学によ
る機械工学の新たな展開― における若手武者修行精制度の助成を受け,比較的短い期間ではあったが,
2005 年 2 月 15 日から 3 月 2 日までの約 2 週間ヨーロッパに滞在した.今回の目的は,骨細胞をはじめ
とする各種細胞の力学刺激に対する応答特性に関する最新の研究成果に触れることであった.まず,オ
ーストリア・インスブルックで開催されたThe IASTED International Conference on Biomedical Engineering ~BioMED 2005~(The International Association of Science and Technology for Development (IASTED) 主催:
2005 年 2 月 16 日~2 月 18 日)に参加した.次に,スイス・ローザンヌのスイス連邦工科大学ローザン
ヌ校(EPFL:Swiss Federal Institute of Lausanne)に滞在した.私が訪問したスイス連邦工科大学ローザン
ヌ校Cell Contractility Group のBoris Hinz 博士は,筋線維芽細胞における力学刺激感知メカニズムや筋線
維芽細胞による皮膚創傷治癒メカニズムに関する研究の第一人者である.最後に,オランダ・アムステ
ルダムのフライエ大学(Vrije University)の Jenneke Klein-Nulend 教授の研究グループを訪問した.彼女
の研究グループでは,骨細胞に対する力学刺激が破骨細胞をいかに活性化するかといったテーマについ
て研究活動を行っており,世界で初めて骨組織からの骨細胞単離に成功した研究グループでもある.言
わば,私が骨細胞の力学刺激感知メカニズムおよび骨細胞ネットワークにおける情報伝達メカニズムの
研究を行うにあたって,もっとも参考としなければならない先達であり,かつもっとも強力なライバル
である.本報告では,約 2 週間の間に私が得たこと・感じたことについて記す.
2. The IASTED International Conference on Biomedical Engineering~BioMED 2005~
2.1 インスブルック(Innsbruck) インスブルックは,オーストリア西
部に位置するチロル地方の中心都市である.「イン川にかかる橋」という
名前をもつこの町(図1)は,マクシミリアン大帝やマリア・テレジアに
愛され,美しいゴシック建築で飾られている.また,1964年と1976年の冬
季オリンピックの開催地としても有名であり,インスブルック中央駅から
見ることができるベルクイーゼルの丘のスキージャンプ台は,「スポーツ
都市インスブルック」のシンボルでもある. インスブルックの人口は約13万人で,町のシンボルである王宮からヘル
ツォーク・フリードリヒ通り・マリア・テレジア通りに沿って市街が発
達しており,旧市街の観光だけならすべて歩いて回れるくらいのコンパ
クトな都市である.インスブルックを起点にしてアルプスの山々へも足
を伸ばせる距離であるが,あいにくの積雪・荒天でケーブルカーが運休
し,雄大な景色を堪能することはできなかったが,市街地から眺める
3000m級の尖った雪山には,逆に尖った心を和ませる力があるように感
じた.文化的には完全にドイツ圏であり,オーストリア名物「ビーナー
シュニッツェル」や盛り合わせ料理「プファンドル」は,食いしん坊で
ある私にも,とても一人では食べきれない量であった. 2.2 BioMED 2005 The International Association of Science and Technology for Development (IASTED) 主催のThe IASTED International Conference on Biomedical Engineering ~BioMED 2005~は,2005 年 2 月 16 日
~2 月 18 日の会期で,インスブルック王宮の隣に位置する Innsbruck Congress(図2)で開催された.本
国際会議での発表は,総じて興味深かったが,医工学における種々の現象のメカニズムに踏み込んだも
図1 イン川沿いの眺め
図2 インスブルック王宮と
Innsbruck Congress
第4章 研究成果報告

のは少なく,観察・測定技術の開発がメインテーマであった.海面骨の流体に対する透過性の評価[1],羊の骨中に埋め込んだ多孔質バイオセラミックス製 Scaffold 内での骨成長の観察[2],骨梁構造の力学特
性評価[3]といった,マイクロ CT スキャン装置による骨梁構造等の精密なモデリングを行った発表が多
く見られた.また,培養ヒーラー細胞の細胞質基質およびミトコンドリアにおける紫外線照射にともな
うCa2+濃度変化の高速・高解像度観察手法の開発[4]に関する発表は,技術的に興味深かった.筆者の現
在の主研究テーマは,「生体組織マトリクスの変形・損傷場と細胞ネットワークの相互作用」であり,単
離骨細胞・骨細胞ネットワークにおける力学刺激にともなう細胞内Ca2+濃度変化の in vitro 観察に取り組
んでいる.この際,直径が 1µm 以下の細胞突起への刺激に対して骨細胞が敏感であることが予想され,
細胞突起への刺激付与方法の検討とともに,観察技術の高速化・高解像度化が必要となっている.筆者
らの実験に適用可能か検討中である.
3. スイス連邦工科大学ローザンヌ校滞在
3.1 ローザンヌ(Lausanne) オーストリアからスイスへの移動には,列車(特急マリア・テレジア
号)を利用した.あいにくの豪雪で風景を楽しむことはできなかったが,車窓から見た氷河は雄大であ
った.スイスはEUの一員でないため,オーストリア→スイスの移動時には国境でのパスポートコントロ
ールを期待したが,そのようなものは一切なく,若干戸惑うとともに
スイスは非常にオープンな国であると感じた.
フランス語圏であるローザンヌは,スイス西部レマン湖沿いの第二
の都市である.急勾配の坂が多数ありレマン湖を見下ろすことができ
る,瀬戸内海を琵琶湖に置き換えた神戸のような町である.レマン湖
畔の世界有数のリゾート地にはオリンピック委員会本部がある.オリ
ンピック博物館の入り口横には,聖火がともされており,マラソンの
ザトペック像が設置されていた.
ローザンヌの人口は約12万人であり,旧市街はノートルダム大聖堂を
中心にコンパクトにまとまっている.チーズフォンデュ(図3),豚肉
のホワイトソース和え(図4),馬肉のステーキなど,スイスの美味を
堪能することができた.レマン湖沿いのローザンヌより東側の地域は
ラ・ヴォー地区と呼ばれ,レマン湖に切り込む南向きの急斜面がブドウ
を豊潤にし,特に白ワインが有名である.特に,猛暑であった2003年も
のの白ワインは格別であった.スイス人はラ・ヴォー地区の白ワインを
非常に誇りに感じており,スイス連邦工科大学ローザンヌ校の
Jean-Jacques Meister教授が,「ドイツ・オーストリアの白ワインより美味しいですね」との質問に,「Of course, our white wine is much, much better than German!」と即答したのは印象的であった.レマン湖沿いの
第一の都市であるジュネーブには,国連ヨーロッパ本部と国際赤十字・赤新月博物館がある.一日かけ
てこれらの見学ツアーを満喫し,世界平和実現に対する思いをはせることができた. 3.2 EPFL EPFL(図5)は,ローザンヌの中心地に位置するフロン駅か
らメトロに乗って約 15 分程度のところにある.ここでは,主に,細胞生物
物理学研究室(Jean-Jacques Meister教授)に訪問した.この研究室は,Calcium Dynamics グループ(Jean-Jacques Meister 教授),Cell Motility グループ
(Alexander B. Verkhovsky 博士),Cell Contractility グループ(Boris Hinz 博士)の3つの研究グループからなっている.博士課程等の学生を含めて全
部で約 15 名程度のスタッフで構成されており,充分に広い居室スペース・
実験スペースを有している.まず,初日は,私の研究経歴と現在の研究テ
ーマに関するセミナーを開催した.従来の研究テーマである繊維強化複合材料の界面メゾメカニクスに
関する紹介と,それとはまったく異なる分野である骨細胞に関する研究を始めるに至った経緯と最新の
結果について,約 30 分程度で発表した.その後,各研究者から最新の研究テーマに関する説明を受けた.
図3 チーズフォンデュと筆者
図4 豚肉のホワイトソース
和えとラ・ヴォーワイン
図5 EPFL

もっとも興味深かったテーマは,筋線維芽細胞の分化前後における接着性の評価に関するテーマであ
った.細胞膜に取り付けたマイクロビーズをレーザーピンセットで保持し引っ張ることで,細胞の接着
性を評価するものである.マイクロビーズのようなものを選択的に骨細胞の細胞突起だけに取り付ける
ことができれば,骨細胞の細胞突起に局所的な引張負荷を加えることができると考えられる.
4. フライエ大学滞在
4.1 アムステルダム(Amsterdam) オランダの首都であるアムス
テルダム(図6)の人口は約73人であり,アムステルダム中央駅を中
心に市街・運河が同心円状に広がっている.13世紀にアムステル川の
河口近くにダムを造り人々が住み始め,港町として各地で迫害された
人々を自由に受け入れながら,力を付けていった.アンネ・フランク
(図7)一家を受け入れたこの町は,国際色豊かであり,「アムステ
ルダム料理」=「多国籍料理」といった感がある.あまりに遠かったた
め行くことはできなかったが,宿泊したホテルのフロントで「国際的な」
レストランについて尋ねたところ,日本贔屓のクルド料理屋さんを推薦
された.さすがは「国際都市」アムステルダムであると実感し,次回滞
在時には必ずクルド料理を堪能しようと決意した次第である.アンネ・
フランクの家に展示された写真の中に,ネオ・ナチスの若者によってア
ンネ・フランク像になされた落書きの写真があったが,人類の営みの愚
かな一面を見た思いで,研究を通して人類のベクトルを前進させる一助
になりたいと切に感じた. 週末には,アムステルダム・アヤックススタジアムの見学ツアーと風
車・大学の町ライデン市に行った.大のサッカーフリークである筆者に
とっては,アヤックススタジアムのピッチに立つことができたことは,
至高の喜びであった.また,ライデン市は「オランダらしい」風車で有
名な町である.中心に位置するライデン大学は,シーボルトが在籍した
ことで歴史的に有名であるが,世界で初めて超伝導現象を発見した大学
でもある.大学附属の植物園では,シーボルトが日本を追放された際に
持ち帰った栃の木(図8)が,周囲を見下ろす大木に育っていたのは印
象的であった. 4.2 フライエ大学 フライエ大学(図9)は,アムステルダム市の南端
に位置し,アムステルダム中央駅からメトロまたはトラムに乗って約 30分程度のところにある.アムステルダムの交通網は時間が正確であると
の事前情報であったが,滞在期間中に 2 度も故障によりメトロ・トラム
がまったく動かなくなるという事態に巻き込まれた.ここでは,主に,
Academic Centre for Dentistry (ACTA)のDepartment of Oral Cell Biology の
Jenneke Klein-Nulend 教授の研究グループを訪問した.博士課程の学生を
含めて約 15 名程度のスタッフで構成されている.EPFL でも感じたことであるが,ここでも充分に広い
居室スペース・実験スペースを有している.やはり,日本の大学の実験スペースは狭すぎるところが多
いように感じた.複合材料の研究に主に携わっていた際にも,試験装置同士の間の距離が小さすぎるた
め,同時に起動した際にお互いのノイズが測定データにのってしまい,苦労した.ここでは,主に,滞
在のための橋渡しを行ってくれたRomel Bacabac 氏(Mel)を中心に,各研究者と1対1でお互いの研究
テーマについて紹介し合った.訪問前週にアメリカで国際会議があり,参加した博士課程学生のうち数
名が帰国途中であり,ディスカッションできなかったのは残念であった. 特に,Jenneke Klein-Nulend 教授の研究グループでは,骨細胞株MLO-Y4 を用いて,引張り・せん断等
の力学刺激に対する破骨細胞誘導因子(PGE2)産生量変化について焦点をあてていた.骨細胞株MLO-Y4
図6 アムステルダム中央駅
図7 アンネ・フランク像
図8 シーボルトが持ち
帰ったといわれる栃の木
図9 フライエ大学
第4章 研究成果報告

の細胞体にはアクチンフィラメント構造が若干形成されており,細胞体
への局所刺激に対しても敏感に反応するという最新の情報を得た.筆者
らが行った単離骨細胞での同様の実験においては,その細胞体には明瞭
なアクチンフィラメント構造が形成されておらず,細胞体への局所刺激
に対して鈍感であったことから,力学刺激に対する骨細胞の応答特性は
アクチンフィラメント構造と大きく関係しているという説に対して確信
に近いものを得ることができた.また,フライエ大学での最大の収穫は,
ニワトリ胚から採取・単離した骨細胞にのみ選択的に接着できる特殊な
抗体を得ることができたことである.この抗体は,Jenneke Klein-Nulend教授の研究グループでしか作ることができないものであり,今後の研究に大
いに役立つと考えられる. 帰国前夜には,Mel と二人でアムステルダム市内のメキシカンバーに飲み
に行った.年齢も近いため,研究のこと,プライベートなこと,アムステル
ダムのこと,京都のことなど楽しく話し込んでいるうちに,最終トラムを乗
り過ごしてしまった.図10および図11は,その最終トラムを背に,ダム
広場で仕方なくポーズをとるMel および筆者である.筆者は再度アムステル
ダムに行くこと,Mel は京都に来ることを堅く約束し,帰国した次第である.
5. おわりに
今回,わずか 2 週間であったが,BioMED 2005 に参加した上,スイス連邦工科大学ローザンヌ校とフ
ライエ大学に滞在することができ,「骨細胞をはじめとする各種細胞の力学刺激に対する応答特性に関
する最新の研究成果に触れる」という目的を達成できた.また,今後の研究遂行のための基本的なアイ
デアもいくつか得ることができた.今回得たこと・感じたことを今後の研究に活かし,「生体組織マトリ
クスの変形・損傷場と細胞ネットワークの相互作用」に関する研究を遂行していきたいと思う.
6. 謝辞
今回,筆者に武者修行の機会を与えてくださいました,21 世紀 COE プログラム「動的機能機械シス
テムの数理モデルと設計論」―複雑系の科学による機械工学の新たな展開―拠点リーダーの土屋和雄教
授(航空宇宙工学専攻),材料グループリーダーの北村隆行教授(機械物理工学専攻)をはじめとする関
係者の皆様に厚く御礼申し上げます.また,今回の筆者の滞在を許可していただきました,スイス連邦
工科大学ローザンヌ校の Jean-Jacques Meister 教授,Boris Hinz 博士および研究室の皆様,フライエ大学の
Jenneke Klein-Nulend 教授,Romel Bacabac 氏および研究室の皆様に心より感謝いたします.
参考文献
[1] Teo, J., Chang, W.S. and Teoh, S.H., Simulation of Flow Across Cancellous Bone Cubes to Determine Permeability, Proceedings of the IASTED International Conference on Biomedical Engineering, (2005) CD-ROM.
[2] Milthorpe1, B.K., Jones, A.C. and Knackstedt, M.A., Micro-CT Determination of Bone Ingrowth into Porous Bioceramics, Proceedings of the IASTED International Conference on Biomedical Engineering, (2005) CD-ROM.
[3] Woo, D., Kim, H. and Yu, Y., The Effect of Specimen Geometry and Voxel Resolution on the Mechanical Characteristics of Trabecular Bone Model Using 3D-Micro Finite Element Analysis, Proceedings of the IASTED International Conference on Biomedical Engineering, (2005) CD-ROM.
[4] Ciubotarua, C.D., Bastianelloa, S., Beltramelloa, M., Pozzanb, T. and Mammanoa, F., Multi-model Imaging of Cytosolic and Mitochondrial Ca2+, Proceedings of the IASTED International Conference on Biomedical Engineering, (2005) CD-ROM.
図10 ダム広場で ポーズをとるMel
図11 ダム広場で
ポーズをとる筆者
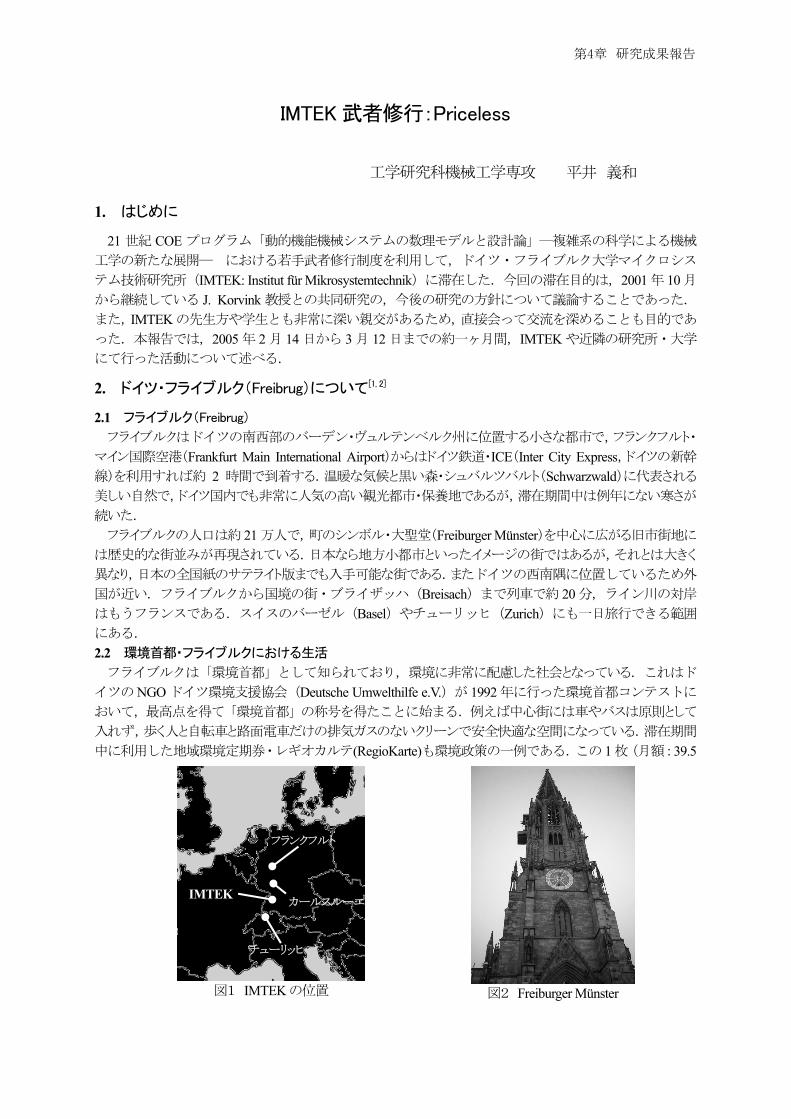
IMTEK 武者修行:Priceless
工学研究科機械工学専攻 平井 義和
1. はじめに
21 世紀 COE プログラム「動的機能機械システムの数理モデルと設計論」―複雑系の科学による機械
工学の新たな展開― における若手武者修行制度を利用して,ドイツ・フライブルク大学マイクロシス
テム技術研究所(IMTEK: Institut für Mikrosystemtechnik)に滞在した.今回の滞在目的は,2001 年 10 月
から継続している J. Korvink 教授との共同研究の,今後の研究の方針について議論することであった.
また,IMTEK の先生方や学生とも非常に深い親交があるため,直接会って交流を深めることも目的であ
った.本報告では,2005 年 2 月 14 日から 3 月 12 日までの約一ヶ月間,IMTEK や近隣の研究所・大学
にて行った活動について述べる.
2. ドイツ・フライブルク(Freibrug)について[1, 2]
2.1 フライブルク(Freibrug)
フライブルクはドイツの南西部のバーデン・ヴュルテンベルク州に位置する小さな都市で,フランクフルト・
マイン国際空港(Frankfurt Main International Airport)からはドイツ鉄道・ICE(Inter City Express,ドイツの新幹
線)を利用すれば約 2 時間で到着する.温暖な気候と黒い森・シュバルツバルト(Schwarzwald)に代表される
美しい自然で,ドイツ国内でも非常に人気の高い観光都市・保養地であるが,滞在期間中は例年にない寒さが
続いた. フライブルクの人口は約 21 万人で,町のシンボル・大聖堂(Freiburger Münster)を中心に広がる旧市街地に
は歴史的な街並みが再現されている.日本なら地方小都市といったイメージの街ではあるが,それとは大きく
異なり,日本の全国紙のサテライト版までも入手可能な街である.またドイツの西南隅に位置しているため外
国が近い.フライブルクから国境の街・ブライザッハ(Breisach)まで列車で約 20 分,ライン川の対岸
はもうフランスである.スイスのバーゼル(Basel)やチューリッヒ(Zurich)にも一日旅行できる範囲
にある. 2.2 環境首都・フライブルクにおける生活
フライブルクは「環境首都」として知られており,環境に非常に配慮した社会となっている.これはド
イツのNGO ドイツ環境支援協会(Deutsche Umwelthilfe e.V.)が 1992 年に行った環境首都コンテストに
おいて,最高点を得て「環境首都」の称号を得たことに始まる.例えば中心街には車やバスは原則として
入れず,歩く人と自転車と路面電車だけの排気ガスのないクリーンで安全快適な空間になっている.滞在期間
中に利用した地域環境定期券・レギオカルテ(RegioKarte)も環境政策の一例である.この 1 枚(月額:39.5
図2 Freiburger Münster
図1 IMTEK の位置
フランクフルト
チューリッヒ
カールスルーエIMTEK
第4章 研究成果報告

ユーロ)で地域内の公共交通機関が乗り放題となる定期券で,近郊のドイツ鉄道,市電,市バス,さら
に私営バスも利用できた.そのため,通学のみならずフライブルク散策や友人との交流には非常に役立
った定期券であった. フライブルクに限らずドイツでは,平日,大きなデパートやスーパーでも午後 8 時には閉店する.「日曜及び
祝祭日の遵守に関する法律」により,土曜日の午後 4 時以降,日曜日は休みとなる.したがって,土曜日の午
前中には家族で買い物をする姿がとてもよく見られた.また買い物には自分の袋を持ち歩き,土産物を買って
もザラ紙で包装して渡されるだけである.日本では言うまでもないが,街頭にも店頭にも商品が溢れ,金さえ出
せば真夜中でもコンビニで好きなものが手に入る.環境問題や生活環境に対する考え方の違いについて,い
ろいろと考えさせられる場面でもあった. 2.3 フライブルク大学と IMTEK
1457 年設立という歴史を誇るフライブルク大学は正式には Albert-Ludwigs-Universität Freiburg といい,
ドイツ国内はもとより世界各国からやってきた約 3 万人の学生が在籍する.大学の建物は旧市街地に広
く分散して街並みの中に溶け込んでいるため,街全体がキャンパスのような印象である.大学の建物と
して,いわゆる普通のビルが徐々に増えているが,多くの建物は伝統的な組石造のままである. IMTEK はフライブルク中央駅(Freiburg (Breisgau) Hbf)から電車で 5 分の位置にあり,1995 年に Faculty
of Applied Scienceに所属する学科として誕生した.IMTEKではMEMS(Micro Electro Mechanical Systems,半導体微細加工技術およびシリコンマイクロマシニング技術などを応用して,マイクロ・ナノ領域で機械部品と
電子部品をシステム化するマイクロ電気機械システム)に関する基礎的な物理・化学分野から,センサ,シ
ステムに関する応用分野までの 18 講座で構成されており,現在 16 講座が運営されている.研究設備と
しては,クリーンルーム棟,研究棟 2 棟,図書館・講義棟,ベンチャー育成関連の研究棟の整備が完了
しており,クリーンルーム棟や各講座の研究・実験室がある研究棟は設備などが非常に充実していた.
ただし何回か図書館を利用することがあったが,蔵書数が充分でなかった所が残念なところである.ち
なみに IMTEK では,午後 8 時になると全体の建物の電灯が一
斉に消灯されるため,研究活動をこの時間帯に行なう時は注意
が必要である. IMTEK では研究はもちろん,MEMS を専門とする研究者・
技術者の教育に力が注がれている.日本や欧米の研究機関と
の間に多数の協定がすでに結ばれており,活発な交流が行わ
れている.京都大学とは 2004 年に,マイクロ工学分野における
新たな展開の一環として,北米の MEMS 研究の拠点であるミシ
ガン大学,フライブルク大学と京都大学の 3 大学アライアンスが
スタートした.また,企業との共同研究にも積極的で,ベンチャー
企業支援も行っている.
3. IMTEK における研究活動
3.1 Char for Simulation Laboratory J. Korvink 教授の研究室では,MEMS のモデリングとシミュレーションに重点をおいて研究を行なって
いる.計算精度を犠牲にせずに大規模な MEMS システムのシミュレーションモデルをコンパクトに計算する手
法,MEMS のプロセスシミュレーションソフト,マイクロ液体の動的挙動解析用シミュレーションソフト,そして
MEMS 技術を用いたセンサの最適設計を目的としたシミュレーションソフトの研究開発等を行なっている.研
究室のメンバーはヨーロッパ各国から集まっており,IMTEK では最大級の研究室である. J. Korvink研究室に滞在した2月16日から3月10日の約3週間の研究内容としては,これまでJ. Korvink
研究室と共同で開発してきた X線応用三次元微細加工シミュレーションシステム[3]における今後の方向性につ
いて議論を行なった.我々の研究対象であるシンクロトロン放射光を応用したディープX線リソグラフィ(DXRL: Deep X-Ray Lithography)は,MEMS 加工技術の中でも加工精度に優れ,電鋳・成形技術と組み合わせる
LIGA(Lithographie, Galvanoformung, Abformung)プロセス[4]によって広範な材料選択性と微細な構造体を大
図3 IMTEK 研究棟

量生産できる利点を持つため注目されている.さらに本研究室が提案したオリジナル技術である「移動X線マ
スク露光法」や「二重X線露光法」と組み合わせることによって,従来の DXRL では実現不可能であった自由曲
面や側壁傾斜を有する三次元微細構造体をサブミクロンオーダの高精度で製作することが可能である. しかし三次元微細加工技術として確立するためには,専用の微細加工シミュレーションツールの構築が必要
不可欠である.しかしX線応用三次元微細加工技術における加工パラメータや,三次元微細構造体の計算手
法は非常に複雑なため,シミュレーションツールに関する研究はほとんど行われていない.そこで滞在中は,
これまでの研究成果をベースに,今後X線応用三次元微細加工技術を光学分野におけるナノメートルオーダ
構造体製作の強力なツールとして位置づけ,加工精度をナノメートルオーダで予測できる加工形状シミュレー
ションツールの実現を目指し,最適なモデリング手法とシミュレーション手法について議論を行なった. また滞在中には,博士学位論文の公聴会があり研究室メンバーと公聴に参加した.30 分のプレゼンテ
ーションの後,約 1 時間の質疑応答が行なわれ,IMTEK 教授陣による厳しい審査がされていた.海外の
博士学位論文の公聴会を体験することができたことも付記しておきたい. 3.2 IMTEK研究室訪問
IMTEK 滞在期間中には,積極的に多くの研究室を訪問することで IMTEK の教授陣と MEMS に関する意
見交流や議論を行った.これまで面識のない教授の研究室訪問は全く経験したことがなかったが,J. Korvink教授のアシストもあったことで日程調整もスムーズに行なえ,下記の研究室訪問をすることができた.研究室訪
問の際には,教授自ら研究室の概要や最新の研究動向を説明していただき,非常に有意義な交流ができた. • Prof. O. Paul(Microsystem Materials分野,17th IEEE International Conference MEMS2004 General
Co-Chair)研究室 • Prof. H. Zappe(Micro-optics分野)研究室 • Prof. R. Zengerle(MEMS Application分野,19th IEEE International Conference MEMS2006 General
Co-Chair)研究室 • Prof. H. Reinecke(Process Technology分野)研究室 • Prof. U. Wallrabe(Micro-actuator分野)研究室
3 月 10 日には,J. Korvink 教授をはじめとする研究室メンバーおよび上記の教授の前で「3D X-ray Lithography Techniques and New Simulation System」と題して,約 30 分の研究発表を行った.主な内容は,これ
までの共同研究によって得られたシミュレーションに関する研究成果,またシミュレーションシステムを開発した
ことで考案された新規な三次元微細加工技術を紹介した. 発表後の質疑応答では,シミュレーションシステムの拡張性や実験結果の考察について理解と興味を非常
に持っていただき,活発な議論が行われた.これまで我々の研究グループが行ってきた研究の意義や有用性
を再確認できたとともに,今後の萌芽を感じさせるものであった.
4. カールスルーエ研究センター(FZK: Forschungszentrum Karlsruhe)の訪問[5]
フライブルクから ICE で約 1 時間のバーデン・ヴュルテンベルク州にあるカールスルーエ研究センター
(FZK: Forschungszentrum Karlsruhe)を 3 月 1 日に訪問した.IMT(Institute of Microstructure Technology), 放射光施設 ANKA(Angstrom Karlsruhe), IMF(Institute for Materials Research)などマイクロ・ナノプロセ
スに関係のある施設を中心に見学した. 研究スタッフ・施設とも
に非常に充実しており研究レベルの高さを肌に感じた.なお
FZK の訪問においては,IMTEK の Prof. J. Hausselt(Materials Process Technology 分野)研究室所属・Dr. T. Hanemann,ANKAのビームライン責任者Dr. Martin Boernerには大変お世話になっ
た. 4.1 カールスルーエ研究センターの概要
カールスルーエ研究センターは,カールスルーエ市の郊外に
あるドイツ最大級の国立研究センターであり,広大な敷地内に材
質研究・地球環境・健康科学・エネルギー・先端テクノロジーに
図4 FZK の全景
第4章 研究成果報告

関連した22の研究所と放射光源ANKAと呼ばれる放射光施設を有している.1994年までは「カールスルーエ
原子力研究センター」と称していたが,最近の原子力エネルギー開発への批判の高まりから名称を「カールス
ルーエ研究センター」に変更して現在に至っている.そのため,研究分野も従来の原子力エネルギー開発を
中心としたものから,LIGA プロセスを利用した MEMS の開発と最新のナノテクノロジーを駆使した新材料開発
に重点を移しつつある. また当研究センターは我々の研究テーマに関連した「LIGA プロセス発祥の地」でもある.1982 年に W.
Ehrfeld らがX線リソグラフィ,電鋳,射出成形を組み合わせたプロセスを開発し,ウラン濃縮技術で使用するウ
ラン同位体分離用ノズルの製作に応用した.ウラン同位体分離用ノズルの構造は,ノズルの大きさに逆比例し
てガスの供給圧力を上昇させることができるため,アスペクト比の高い構造体が要求された.そこにシンクロトロ
ン放射光を用いた高アスペクト比構造体製作を応用することで,ウラン同位体分離用ノズルが完成した. 4.2 ANKA(Angstroemquelle Karlsruhe)
シンクロトロン放射光源 ANKA は,世界初の産業界向け用途
に特化したシンクロトロン放射線源で,2001 年 9 月に操業が開
始された.ANKA はユーザーが独占的かつ迅速に(たいてい
は14日以内に)シンクロトロン放射線源にアクセスできるようサー
ビスを提供しており,また研究者が非常に深い技術知識を有す
るため,ほとんど全ての問題は解決が約束されているとのことで
あった.また,微細加工技術への応用だけでなく,X 線回析や
X 線蛍光分析といった分析用途ビームラインも操作可能である.
LIGAプロセスに関連した3本のビームラインはいずれもクリーン
ルーム内に設備されており,産業界向け用途に特化している実
験設備の充実さには驚くばかりであった. 4.3 IMT(Institut für Mikrostrukturtechnik)
カールスルーエ研究センターに属する IMT は,マイクロ流体とマイクロ光学という 2 つの広い戦略的な応用
分野において,ポリマー樹脂をベースとしたMEMSの形成技術を開発するとともに,産業界での実用化を行っ
ている.その一つは AMANDA(Surface Micromachining, Molding and Diaphragm Transfer を意味するドイツ語
の頭文字)と呼ばれるマイクロ流体素子の製作のために開発されたもので,この技術を用いて流量・圧力計や
ポンプ,バルブを試作されていた.また実際に商品化された機器も施設内には多く展示されており,研究室か
ら商品化までの長い困難な道のりなどについても説明を受けた.
5. スイス連邦工科大学(ETH: Eidgenössische Technische Hochschule Zürich)の訪問[6]
5.1 スイス連邦工科大学の概要 フライブルクから ICEで約2時間,スイスの商工業の中心都市チューリヒは,2つの山に囲まれた谷に市街地
が広がりその先が湖になっている美しい街である.1854 年に設立されたスイス連邦工科大学チューリッヒ校
(ETH Zurich)は,フランス語圏のローザンヌ校(EPFL)と共にスイスにおける先端研究の頭脳を輩出している.
国際色豊かな 1 万8000 人の研究者・学生・リサーチアシスタントで構成されており,自然科学の諸分野で輝か
図5 ANKA
図6 ETH 本部校(左)と PEL の建物(右)

しい業績を残している.またAlbert Einsteinをはじめとする数々のノーベル賞を輩出したことでも有名であり,最
近では 2002 年に Kurt Wuethrich が化学賞を受賞している. ETH のキャンパスは 2 つに分かれており,一つは市街中心部に近いセンテレム(Zentrum),もう一つは郊外
の森に囲まれたヘンガーベルク(Hönggerberg)にある.センテレムにある本部校は,街と融合するように大学の
建物が多数滞在しており,主に教養部に相当する講義が行われている.研究施設のほとんどはヘンガーベル
ク(キャンパスイメージは,ちょうど京都大学・桂キャンパスと類似する)にあり,訪問先の PEL(Physical Electronics Laboratory)もここにある.なお,本年は大学創立 150 周年ということで,「WELCOME TOMMOROW」と題して大々的に大学をアピールするイベントが数多く開催されている. 5.2 PEL(Physical Electronics Laboratory)
CMOSMEMS 及び CMOS センサの世界的権威・H. Baltes 教授をリーダーとする PEL は,約 30 人のメンバ
ーで構成され,研究テーマは MEMS とセンサシステムに関する研究である.研究室誕生の 1993 年以降,卒
業生 10 人が教授(IMTEK の教授では Prof. O. Paul,Prof. J. Korvink)になるという研究レベルが非常に高い
研究室であり,アクティビティの高さは相当なものである.博士課程の学生は,ETH の学部出身の学生も在籍
するが,それ以上にドイツやオーストリア等,他国の大学出身の学生が多いことにはここでも驚かされた. PEL では回路を一体化した集積センサ,集積化 MEMS を念頭におき,センサ,MEMS は CMOS とのコン
パティビリティを常に意識して研究している.訪問した 3 月 7 日には創立記念イベントの一環として,地元の小
中学生を対象にしたオープンキャンパスが開催されている期間中であった.PEL 研究室では,CMOS 技術で
製作したカンチレバー型ケミカルセンサシステムの概要が子供たちにも理解しやすい形式で説明されていた.
このケミカルセンサは,1 ピコグラム以下の検出分解能を有する揮発性有機化合物検出用共振ビーム型ガスセ
ンサシステムである.このセンサを組み込んだ手のひらサイズのマイクロガスセンサシステムを用いて,キルシ
ュ(kirsch)の検出原理などが紹介されていた. 集積化センサや集積化 MEMS の実現方法としては,回路部やセンサの基本部分は学生が設計し,これを
標準 IC プロセスによりファウンドリに試作を依頼する.完成したウェハを,ポストプロセスという形で研究室の実
験室でセンサ部分を製作し,評価するといった具合である.機械工学専攻の学生からすると COMS センサの
設計作業などは同じ MEMS に関する研究であっても異分野のように思われたが,逆に PEL の学生に「機械工
学専攻で MEMS?」と質問されたことに面白さを感じた. さまざまな研究テーマについて議論した中でも,MEMS2005 で報告された 10 個のカンチレバーアレイを有
する集積型 AFM が非常に興味深い研究内容であった.AFM のカンチレバーはバイメタルで駆動し,ピエゾ
抵抗で力を検出する.表面に単分子膜を形成したマイクロガラス球をカンチレバーに取り付けて測定するシス
テムである.詳細は[7]を参照していただければ幸いである.
6. まとめ
最後に今回の武者修行の意義を挙げると,月並みではあるが視野が広がったということである.単純なこと
ではあるが,実際に海外で活動して様々ことを肌で感じることで,以前よりワイドな視点でMEMS研究分野を眺
めてみることができるようになった.今日では野球やサッカーの途中経過や結果は研究室にいながらでもイン
ターネットなどの情報機器を利用すれば,リアルタイムに知ることができる.しかし,その場の雰囲気,そして真
の感動や興奮はスタジアムでしか味わうことができない.それと同様のことが研究活動にも当てはまるかと思わ
れる.つまり電子メールや電子ジャーナルからでも研究に関する情報は得ることができ,世界に出なくても情報
は入るため何か充足してしまう感があるが,そのままでいると「井の中の蛙」かもしれない.したがって,若手研
究者はチャンスが自分にあれば積極的に海外の研究者を訪問して研究を行なってほしい. また約 1 ヶ月という貴重な時間を,研究課題に直接関することに使ったことはもちろんであるが,それ以外に
心掛けたことがある.それは,出来るだけ多くの時間を IMTEK学生の生活とドイツ文化に触れるために使うこと
であった.そのため,J. Korvink 教授をはじめ多くの研究室メンバーや友人にお世話になり,ホームパーティー
に参加してドイツ料理を作ったり,学生が集まるレストランに出かけたり,「フライブルク独日文化協会」の会議
にも飛び入りで参加した.これらの活動を通して異文化交流することも,研究成果を出すことと同様に武者修行
制度を利用する研究者には必要であると考えられる.
第4章 研究成果報告

1 ヶ月間,ドイツの研究者と親交を深めたことで,IMTEK の MEMS の研究環境を知ることができ,学会発表
等とは大きく異なる刺激を受けた.その結果,研究に対する意識も武者修行前とは変わり,これらは「Priceless」としか表現のしようがない.おそらくこの理解と意識が,これからの私の研究活動に様々な形で影響を与えてい
くだろう.
7. 謝辞
今回,このような若手武者修行制度の機会を与えていただいた COE 拠点リーダー 航空宇宙工学専攻 土
屋和雄教授に心より感謝の気持を表明したい.また,若手武者修行制度の対象者に私を選んでくださったこと
に対して,指導教員である機械工学専攻 田畑修教授に心より感謝の気持を表明したい.そして,研究活動の
場となった IMTEK の研究スタッフ,特に J. Korvink 教授と日常の細々した相談にも快く応じてくれた J. Korvink研究室の Mr. D. Mager と Ms. M. Klein に,心より感謝の気持を表明したい.最後に私のドイツ滞在を真に心地
好いものにしてくれたドイツの風光とドイツで出会ったすべての人々にも心よりの感謝を表明したい.おかげで
その 1 ヶ月間,私は病気も一切せず,個人的なトラブルにも一切巻き込まれることもなかった.
参考文献
[1] フライブルク公式 HP:http://www.freiburg.de/ [2] フライブルク大学・IMTEK:http://www.imtek.de/ [3] Y. Hirai et al., “3D Simulation System for Moving Mask Deep X-ray Lithography”, 2003 International
Symposium on Micromechatronics and Human Science, 2003, 271-276. [4] E. W. Becker et al., “Fabrication of microstructures with high aspect ratios and great structural heights by
synchrotron radiation lithography, galvanoforming, and plastic moulding (LIGA process)”, Microelectronic Engineering, Vol. 4, Issue 1(May 1986), 35-56.
[5] カールスルーエ研究所(FZK):http://www.fzk.de/ [6] スイス連邦工科大学(ETH Zurich):http://www.ethz.ch/ [7] Sadik Hafizovic et al., “Single-chip mechatronic microsystem for surface imaging and force response studies”,
PNAS, Vol. 101, No. 49(December 2004), 17011-17015.