egce491 mat lab
TRANSCRIPT

เอกสารประกอบการสอน
วศยธ 491 คณตศาสตรขนสงในงานวศวกรรมโยธา
EGCE 491 Advanced Mathematical Method for Civil Engineering Applications
โดย
ดร.วรรณสร พนธอไร โครงการจดตงภาควชาวศวกรรมโยธา
คณะวศวกรรมศาสตร มหาวทยาลยมหดล

คานา
ในปจจบนเทคโนโลยการเรยนการสอนไดกาวหนาไปมาก รปแบบการเรยนรสมยใหมม
แนวโนมทจะผนวกการสอนเชงทฤษฎควบคกบการทดลองในเชงปฏบตผานสอการใชโปรแกรม
คอมพวเตอร ซงสงผลใหนสตนกศกษาสามารถเขาใจหลกการและทฤษฎทซบซอนไดอยางรวดเรว
และมประสทธภาพมากขน การประยกตใชวธทางคณตศาสตรขนสงเพอแกปญหาทางวศวกรรม
โยธาเปนอกหนงรายวชาทเกยวของกบการแกปญหาทซบซอนโดยการใชองคความรวธเชงตวเลข
ประยกตทสามารถนาไปชวยวเคราะห และหาคาเฉลยของปญหาคณตศาสตรขนสงในงานวศวกรรม
การเรยนการสอนของรายวชานเนนการใชโปรแกรมคอมพวเตอรในการวเคราะห ทดสอบแนวคด
เปรยบเทยบกบทฤษฏทางคณตศาสตรเพอการแกปญหาโจทยตางๆ อาทเชน การหาคาเหมาะทสด
ในงานกลศาสตรของแขงและโครงสราง การแกสมการเชงอนพนธ การวเคราะหการสนไหว การ
วเคราะหฟเรยร และปญหาคาขอบ ไดภายในเวลาทมจากด
ขาพเจาไดเรยบเรยงเอกสารประกอบคาสอนนขนทงนเพอใหนสตปรญญาตร ของ
ภาควชาวศวกรรมโยธา คณะวศวกรรมศาสตร มหาวทยาลยมหดล ใชเปนคมอประกอบการเรยนร
การประยกตใชวธทางคณตศาสตรขนสงเพอแกปญหาทางวศวกรรมโยธา โดยสามารถทาความ
เขาใจตามเนอหาในแตละบทซงประกอบดวยทฤษฎทางคณตศาสตรทเกยวของ การยกตวอยางวธ
ประยกตใชงานของฟงกชนของโปรแกรมคอมพวเตอรทกาลงเปนทนยมแพรหลายอาทเชน
MATLAB และ EXCEL ในการแกปญหาโจทย ซงนสตนกศกษาสามารถทาความเขาใจตามเนอหา
ในแตละบทไดภายในเวลาประมาณ 2 -3 ชม. เมออานครบทกบทแลวนสตนกศกษากสามารถเรยนร
คนควา และประยกตใชเพมเตมไดเอง
ทายนขาพเจาขอกราบขอบพระคณคณพอคณแม คณครและอาจารย ผร เพอนๆและพ
นองทกทานทไดมสวนในการประสทธประสาทความรแกผเขยนทงในทางตรงและทางออม ผเขยน
ขออทศความดแกทกทาน หากมขอบกพรองใดๆในหนงสอเลมน ผอานสามารถสงขอคดเหนหรอ
คาแนะนาทเปนประโยชนผานทางไปรษณยอเลกทรอนกสมาไดท e-mail: [email protected]
เพอทผเขยนจะไดดาเนนการแกไขในการจดพมพครงตอไป
ดร. วรรณสร พนธอไร
อาจายประจาภาควชาวศวกรรมโยธา
คณะวศวกรรมศาสตร มหาวทยาลยมหดล
http://www.egmu.net/civil/wonsiri

สารบญ หนา
คานา บทท 1 เทคนควเคราะหเชงตวเลขเพอการแกปญหาระบบสมการเชงเสน 1
1.1 ระบบของสมการเชงเสน 1
1.2 เมทรกซ 2
1.3 การกระทาและคณสมบตเชงมลฐานของเมทรกซ 3
1.4 อนเวอรสการคณของเมทรกซและดเทอรมนนต 5
1.5 การเขยนระบบสมการเชงเสนใหอยในรปเมทรกซ 8
1.6 การแกระบบสมการเชงเสนในรปของเมทรกซเพอหาผลเฉลย 9
1.7 ความรพนฐานเกยวกบ MATLAB เพอการแกปญหาระบบสมการเชงเสน 10
1.8 เทคนคการประยกตใชโปรแกรม MATLAB เพอการแกปญหาระบบสมการ 29
เชงเสนทเกยวของกบงานทางวศวกรรมโยธา – กรณศกษา (การวเคราะห
โครงขอหมน 2 มต)
บทท 2 เทคนควเคราะหเชงตวเลขเพอการประมาณคาในชวงและการประมาณเสนโคง 34
ทเหมาะสม
2.1 บทนา 34
2.2 วธการประมาณเสนโคงทเหมาะสม 35
2.2.1 วธ Linear Regression โดย Least Square Approximation 35
2.2.2 วธ Polynomial Regression โดย Least Square Approximation 47
2.2.3 วธ Multiple Linear Regression โดย Least Square Approximation 50

สารบญ หนา
2.3 วธการประมาณคาในชวง 51
2.3.1 การประมาณคาในชวงเชงเสน (Linear Interpolation) 51
2.3.2 การประมาณคาในชวงกาลงสอง (Quadratic Interpolation) 52
2.3.3 การประมาณคาในชวงฟงกชนพหนาม (Polynomial Interpolation) 53
บทท 3 เทคนควเคราะหเชงตวเลขเพอการแกสมการเชงอนพนธแบบสามญ 57
3.1 บทนา 57
3.2 วธของ Euler 59
3.3 วธของ Huen’s Method (Predictor-Corrector Approach) 62
3.4 วธ Runge-Kutta (RK Method) 66
บทท 4 เทคนควเคราะหเชงตวเลขเพอการอนทรกรลเชงตวเลข 70
4.1 บทนา 71
4.2 การประมาณคาอนทกรลในชวงโดยฟงกชนเชงเสนหรอวธ Trapezoidal rule 75
4.3 พนฐานการประมาณคาอนทกรลโดยฟงกชนใน MATLAB 77
4.4 การประมาณคาอนทกรลในชวงโดยวธ Simpson’s rule 79
4.5 การวเคราะหคาความคลาดเคลอนสาหรบวธ Trapezoidal rule 83
4.6 การวเคราะหคาความคลาดเคลอนสาหรบวธ Simpson’s rule 85
4.7 การประยกตใชวธ Trapezoidal และ Simpson’s rule ในงานวศวกรรม 87

สารบญ หนา
บทท 5 เทคนคการหาคาทเหมาะสมทสด Optimization 90
5.1 บทนา 90
5.2 การนาเอา Optimization ไปใชประโยชนในงานวศวกรรมโยธา 90
5.3 การแกปญหาวศวกรรมโดยใชเทคนค Optimization รวมกบ Excel 92
5.4 การแกปญหาวศวกรรมโดยวธกราฟ 98
บทท 6 อนกรมฟเรยร 107
6.1 บทนา 107
6.2 นยามเกยวกบการเคลอนทแบบฮารโมนกส 108
6.3 การวเคราะหฮารโมนกสในรปอนกรมฟเรยร 114
บรรณานกรม 146
เกยวกบผเขยน 147

บทท 1
เทคนควเคราะหเชงตวเลขเพอการแกปญหาระบบสมการเชงเสน
1.1 ระบบของสมการเชงเสน (System of Linear Equations)
ระบบของสมการเชงเสน (System of Linear Equations) หมายถง ระบบของสมการทอยในรป
ตอไปน
mnmnmm
nn
nn
bxaxaxa
bxaxaxabxaxaxa
=++
=+++=+++
L
MMOMM
L
L
2211
22222121
11212111
----------------------------------- (1.1)
โดยท ija และ kb ทกตวเปนจานวนจรง และ nxxx ,,, 21 L เปนตวไมทราบคา
ผลเฉลยของระบบสมการเชงเสนหรอทรจกกนดในนามของคาวา “ราก” ของระบบสมการ (1.1)
ในทนมจานวน n ตว คอ nxxx ,,, 21 L ซงสอดคลองกบสมการ หากระบบของสมการมรากอยางนอย 1ชด
เราจะเรยกระบบวาเปนระบบชนด คอนซสเทนท (Consistent) และถาหากไมสามารถหารากหรอผลเฉลย
ของระบบไดเราจะเรยกวา อนคอนซสเทนท (Inconsistent) และถา 0,,, 21 =mbbb L เราจะเรยกระบบ
สมการนวาระบบสมการเอกพนธ (Homogeneous system)
ตวอยางของระบบสมการไดแก 406632286435434
321
321
321
=++=++=−+
xxxxxxxxx

2
1.2 เมทรกซ (Matrix)
เมทรกซ (Matrix) หมายถง การจดเรยงเลขชดหนงแถว (row) และเปนหลก (column) ซงอยใน
รปลกษณะสเหลยมมมฉากและเขยนแทนดวยสญญลกษณดงน
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
mnmm
n
n
aaa
aaaaaa
A
L
MOMM
21
22221
11211
...
...
----------------------------------- (1.2)
ในทน ija เปนจานวนจรง (หรอจานวนเชงซอน) ทอยในตาแหนงแถวท i และหลกท j เพอความสะดวก
ในบางครงเรามกนยมเรยก ija วาเปน “เอนทร” (entry) หรอสมาชกของ A เพอความสะดวกเราจะเขยน
=A ][ ija
ถา A เปนเมทรกซทมจานวนแถว m และ จานวนหลก n เราจะเรยก A วาเปน (m x n)
เมทรกซ และเขยนแทนดวยสญลกษณ nm A ในกรณท จานวนแถว m เทากบจานวนหลก n (m = n) เรา
จะเรยก A วาเปนสแควรเมทรกซอนดบท n และอาจเขยนแทนดวยสญลกษณ nA นนคอ
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
nnnn
n
n
n
aaa
aaaaaa
A
L
MOMM
21
22221
11211
...
...
----------------------------------- (1.3)
ตวอยางของเมทรกซ เชน ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
663864434
A

3
1.3 การกระทาและคณสมบตเชงมลฐานของเมทรกซ (Matrix Fundamentals and its Operations)
1.3.1 การเทากนของเมทรกซ (Equality of Matrices)
ถา =A ][ ija เปน (m x n) เมทรกซ และ =B ][ ijb เปน (p x q) เมทรกซ เราจะเรยก
เมทรกซ A = เมทรกซ B ถา m = p และ n = q และ ija = ijb สาหรบ i = 1,2,…, m และ j = 1,2,…, n
ตวอยางการเทากนของเมทรกซ ⎥⎦
⎤⎢⎣
⎡−
+=⎥
⎦
⎤⎢⎣
⎡+−
wvtu
ttt
33
111 กตอเมอ 1 = u; 1-t = 3+t; t = v-3; 1+t = w
นนคอ 1 = u; t = -1; v = 2; w =0
1.3.2 การบวกกนของเมทรกซ (Addition of Matrices)
ถา =A ][ ija และ =B ][ ijb เปน (m x n) เมทรกซ ผลบวกของ A และ B ซงเขยนแทน
ดวยสญลกษณ BA + คอ (m x n) เมทรกซ =C ][ ijc ซงมคณสมบตดงน ijij ac = + ijb สาหรบ i =
1,2,…, m และ j = 1,2,…, n
ตวอยางการบวกกนของเมทรกซ ⎥⎦
⎤⎢⎣
⎡−
=⎥⎦
⎤⎢⎣
⎡−−
=431
120;
412321
BA
ถา BA + จะไดวา ⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡−+−+++−+
=+023401
443112132201
BA

4
1.3.3 การคณกนของเมทรกซ (Scalar Multiples of Matrices)
a) ถา =A ][ ija เปน (m x n) เมทรกซ และ c เปนจานวนจรง (หรอจานวนเชงซอน) ผล
คณของ A ดวย c ซงเขยนแทนดวย c A คอ (m x n) เมทรกซ =C ][ ijc โดยท ijij cac = สาหรบ i = 1,
2, m และ j = 1, 2,…, n
ตวอยางการคณกนของเมทรกซ ⎥⎦
⎤⎢⎣
⎡−−
=412321
A กบจานวนจรง c = 2
จะได c A = ⎥⎦
⎤⎢⎣
⎡−−
=⎥⎦
⎤⎢⎣
⎡−−
824642
412321
2
b) ถา =A ][ ija เปน (m x n) เมทรกซ และ =B ][ ijb เปน (n x p) เมทรกซ ผลคณของ
A และ B ซงเขยนแทนดวยสญลกษณ ABC = คอ (m x p) เมทรกซ ซง =C ][ ijc มคณสมบตดงน
njinjijikjikn
kij babababac +++==∑ =...22111
สาหรบ i = 1, 2, m และ j = 1, 2, …, n
ตวอยางการคณกนของเมทรกซ ⎥⎦
⎤⎢⎣
⎡−−
=412321
A กบ ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−=
1234
52B จะได ABC = = ⎥
⎦
⎤⎢⎣
⎡ −166
24
อกตวอยาง ⎥⎦
⎤⎢⎣
⎡−
=3121
A กบ ⎥⎦
⎤⎢⎣
⎡=
1012
B จะได AB = ⎥⎦
⎤⎢⎣
⎡− 22
32 และ BA = ⎥⎦
⎤⎢⎣
⎡− 31
71
ขอสงเกต 1) ผลคณ C = AB จะหาคาไดกตอเมอ จานวนหลกของเมทรกซ A เทากบจานวนแถวของเมท
รกซ B นอกจากนนจะพบวาสมาชกทอยในตาแหนงแถวท i และหลกท j ของเมทรกซ C เกดจากแถวท i
และชองท j ของ B นนคอ
2) การคณกนของเมทรกซไมมคณสมบตสลบท นนคอ AB BA≠

5
1.4 อนเวอรสการคณของเมทรกซและดเทอรมนนต
อนเวอรสสาหรบการคณของเมทรกซ A กคอเมทรกซทคณกบเมทรกซ A แลวไดเมทรกซ
เอกลกษณ นนคอ AA-1 = A-1A = I เรยก A-1 วาอนเวอรสการคณของเมทรกซ A
1.4.1 อนเวอรสการคณและดเทอรมนนตของเมทรกซทม 2 แถว 2 หลก
ถา ⎥⎦
⎤⎢⎣
⎡−
=⎥⎦
⎤⎢⎣
⎡= −
dcba
bcadA
dcba
A 1; 1 ------------------------------------- (1.4)
ถา bcaddcba
Adcba
A −==⎥⎦
⎤⎢⎣
⎡= )det(; -------------------------------- (1.5)
ขอสงเกต 1) ถาสงเกตใหดจะพบวาเราจะหาอนเวอรสของเมทรกซ A ไดกตอเมอ ad – bc = 0
เทานน ดงนนจะมเมทรกซอยมากมายทเราไมสามารถหาอนเวอรสได
2) เมทรกซใดหาอนเวอรสสาหรบการคณได เรยกเมทรกซนนวา นอนซงกลารเมทรกซ
3) เมทรกซใดหาอนเวอรสสาหรบการคณไมได เรยกเมทรกซนนวา ฃงกลารเมทรกซ
ตวอยางการหาดเทอรมนนตทม 2 แถว 2 หลก

6
1.4.2 อนเวอรสการคณและดเทอรมนนตของเมทรกซทม 3 แถว 3 หลก
(ก) ไมเนอรของสมาชกในเมทรกซ - ไมเนอร (minor) ของสมาชกในเมทรกซใด คอดเทอรมนนตของเมทรกซดงกลาว แตตดเอาแถวและหลกทสมาชกนนอยออกไป และ เรานยมใชสญลกษณ Mij แทนไมเนอรของสมาชกในแถวท i หลกท j เชน
ไมเนอรของ 6 คอ ตดหลกท 3 และแถวท 2 ออก แลวหาดเทอรมนนต
(ข) โคแฟกเตอรของสมาชกในเมทรกซ - โคแฟกเตอร (cofactor) ของ สมาชกในแถวท iหลกท j นนคอ
Cij = (-1)i+jMij
เชน
โคแฟกเตอรของ 1 = C11 = (-1)1+1M11
(ค) โคแฟกเตอรเมทรกซของเมทรกซ - โคแฟกเตอรเมทรกซของเมทรกซ A คอ เมทรกซทเกดจากการ เอาโคแฟกเตอร ของสมาชก aij ไปแทนทสมาชก aijเรานยมใช Cof.A แทนโคแฟกเตอรเมทรกซของเมทรกซ A
นนคอ ถา

7
จะไดวาโคแฟกเตอรเมทรกซของเมทรกซ A = Cof.A
(ง) เมทรกซผกพน (adjoint matrix) - เมทรกซผกพน คอ เมทรกซทเกดขนจากการนาเอา โคแฟกเตอรเมทรกซของเมทรกซไปทรานสโพส เรานยมใช adj.A แทนเมทรกซ ผ ก พ น ข อ งเมทรกซ A นนคอ adj.A = (Cof.A)t จากเมทรกซผกพนทเราหาไดดงกลาว เราสามารถนาไปหาอนเวอรสไดดงน
ให A เปนเมทรกซมต 3 3 จะไดวา
-------------------------------- (1.6)
เมอ det A 0
ตวอยาง
วธหาดเทอรมนนต det (A)
นาโคแฟกเตอรของแตละหลก หรอแตละแถวมาคณกบคาประจาตาแหนงนน (aij: a11=1 a12=2 a13=3 ...a33=9) แลวรวมกน
(โคแฟกเตอร: Cij หาจากผลคณระหวาง ดเทอรมนนตของไมเนอร: det(Mij) กบ (-1)^(i+j) เมอ i,j คอตาแหนงแถวและหลกของAตามลาดบ) เขยนแทนขนตอนนดวยสญลกษณ
Cij= [(-1)^(i+j)] det(Mij) )

8
วธหาMij ทาโดยตดแถวท i (แนวนอน) และ หลกท j (แนวตง) ของ Aออก เชน
M11= ⎥⎦
⎤⎢⎣
⎡9865 ดงนน det M12= (5x9)-(6x8)= -3
C11= [(-1)^(1+1)](-3)=-3
detA=(a11xC11)+(a12xC12)+(a13xC13)
=-3+12-9=0
เนองจาก detA=0 เราไมสามารถหาเมทรกซผกพนได นนหมายถงเมทรกซนไมมอนเวอรส
ขอควรสนใจ
ถา A และ B เปนเมทรกซทหาอนเวอรสการคณได
1.(A-1)t = (At)-1
2.(AB) -1= B-1A-1
ขอควรระวง
ขอความตอไปนไมจรง
(AB)-1 = A-1B-1
1.5 การเขยนระบบสมการเชงเสนใหอยในรปของเมทรกซ
กาหนดระบบสมการเชงเสนดงสมการ (1.1)
mnmnmm
nn
nn
bxaxaxa
bxaxaxabxaxaxa
=++
=+++=+++
L
MMOMM
L
L
2211
22222121
11212111

9
จากระบบของสมการน ถากาหนดเมทรกซ A, X และ B ดงตอไปน
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
mnmm
n
n
aaa
aaaaaa
A
L
MOMM
21
22221
11211
...
...
; ⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
nx
xx
XM2
1
; ⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
mb
bb
BM2
1
เราสามารถเขยนระบบของสมการเชงเสนทกาหนดใหอยในรปของเมทรกซ ไดดงน
A X = B
เมทรกซ A เรยกวาเปน “เมทรกซสมประสทธ” ของระบบสมการเชงเสน
ตวอยางการเขยนระบบสมการเชงเสนใหอยในรปของเมทรกซ
406632286435434
321
321
321
=++=++=−+
xxxxxxxxx
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −
402235
663864434
3
2
1
xxx
1.6 การแกระบบสมการเชงเสนในรปของเมทรกซเพอหาผลเฉลย
จากระบบสมการในขอ 1.4 406632286435434
321
321
321
=++=++=−+
xxxxxxxxx
หรอในรปของเมทรกซ AX = B โดยท⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
663864434
A ;⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
3
2
1
xxx
X ; B ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
402235
10
หากเราตองการหาผลเฉลย หรอกคอคาตางๆ ในเมทรกซ X วธทงายทสดกคอการหา “ดเทอรมนนต”
ของเมทรกซ A แลวนาไปคณกบเมทรกซ B หรอ X = A-1B
1.7 ความรพนฐานเกยวกบ MATLAB เพอการแกปญหาระบบสมการเชงเสน MATLAB (MATrix LABoratory) เปนโปรแกรมทออกแบบมาเพอใชสาหรบการคานวณทาง
คณตศาสตรโดยเฉพาะสาหรบงานทางดานวทยาศาสตรและวศวกรรมศาสตร โครงสรางพนฐานการ
คานวณของโปรแกรม MATLAB จะอยในรปของเมทรกซ ซงกเปนทมาของชอโปรแกรมดวย สาหรบ
เนอหาทจะกลาวถงดงตอไปมการเรยงลาดบดงน การเรมตนการใชงานโปรแกรม MATLAB การใชคาสง
สาหรบการสรางตวแปรในรปของเวกเตอรและเมทรกซ ฟงกชนพนฐานสาหรบการสรางเมทรกซ การแก
สมการเชงเสนและตวอยางของโจทยปญหาทเกยวของกบงานวศวกรรมโยธาดวยโปรแกรม MATLAB
1.7.1 เรมตนการใชงานโปรแกรม MATLAB ในการเรยกใชงานโปรแกรม MATLAB ใหเรยกใชโดยการกดดบเบลคลกทชอไฟลทชอวา
“matlab.exe” ในชอไดเรคทอรทตดตงโปรแกรม MATLAB หรอท ไอคอนใชงานทเชอมตอไปยงชอ
ไดเรคทอรทตดตงโปรแกรม MATLAB (รปท 1.1)
Matlab r2006a.lnk
รปท 1.1 ไอคอนใชงานทเชอมตอไปยงชอไดเรคทอรทตดตงโปรแกรม MATLAB

11
ภายหลงกดดบเบลคลกหนาตางแรกทจะถกแสดงขนมากคอ “หนาตางคาสง (command window)” ดง
แสดงในรปท 1.2 หนาตางนจะเปนสวนทผใชงานจะทาการปอนคาสงตางๆเพอผลของการคานวณและยง
เปนสวนทแสดงผลลพธออกมาทางหนาจอคอมพวเตอรอกดวย โดยทเครองหมาย “>>” เปนตวบอกวา
โปรแกรม MATLAB พรอมทจะรอรบคาสง ณ จดน
รปท 1.2 หนาตางคาสงของโปรแกรม MATLAB
หนาตางคาสงของโปรแกรม MATLAB จะประกอบไปดวยเมนหลกหลายๆเมน ซงมรายละเอยด
ดงตอไปน

12
• เมน File จะประกอบไปดวยการสรางหนาตาง editor คาสงขนมาใชใหมอกหนาตางหนง (รปท
1.3)เพอใชในการเขยนหรอแกใขโปรแกรม การเรยกไฟลทมอยขนมาใชงาน การบนทกขอมลตว
แปรตางๆ การเปลยนไดเรกทอรทกาลงทางานอย การพมพขอมลออกทางเครองพมพ การปด
หนาตางคาสง เปนตน
รปท 1.3 หนาตาง editor ของโปรแกรม MATLAB
• เมน Edit, Debug, Desktop, Window ประกอบไปดวย การเลอกสาเนาขอมล การนาขอมล
สาเนาออกไปวาง การเรยกคาสงเดมมาใช
• เมน Help ซงผใชสามารถเรนกดตวอยางการใชงานชดคาสงทโปรแกรม MATLAB จดเตรยมไวให

13
1.7.2 คาสงพนฐานสาหรบการเรมตนใชโปรแกรม MATLAB
ในลาดบแรกจะขอเรมจากการกาหนดคาคงทใหกบตวแปรเชน ถาตองการกาหนดใหตวแปร x ม
คาเทากบ 5 จะตองทาการปอนคาสงลงในหนาตางคาสงดงน
>> x=5
เมอกดปม Enter หนาตางคาสงจะแสดงผลลพธเปน
x = 5 >> นนคอโปรแกรม MATLAB จะแสดงผลลพธของ x = 5 ออกมา พรอมทงแสดงเครองหมาย >> เพอรอรบ
คาสงตอไป
ในกรณทไมตองการใหโปรแกรม MATLAB จะแสดงผลลพธของ x = 5 ออกมาทางหนาจอกใหใส
เครองหมาย “;” ปดทายคาสงนนกอนกดปม Enter เชนถาตองการกาหนดใหตวแปร y มคาเทากบ 3 โดย
ไมตองแสดงผลลพธออกทางหนาจอกสามารถทาไดโดยการปอนคาสง
>> y=3; >> เมอกดปม Enter โปรแกรม MATLAB กจะไมแสดงผลลพธออกทางหนาจอหนาตางคาสงแตจะปรากฎ
เครองหมาย >> แทน

14
1.7.3 การสรางตวแปรในรปของสเกลาร, เวกเตอรและเมทรกซ
ในลาดบตอไปจะเปนการใชคาสงเพอสรางตวแปรในรปแบบตางๆทงนขนอยกบประเภทขอมล
ตางทสามารถใชงานไดในโปรแกรม
(ก) สเกลาร คอ คาทเปนไดทงจานวนจรงหรอจานวนเชงซอน คาสเกลารสามารถทจะถกกาหนด
ลงในตวแปรใดๆตามทตองการไดทนท ตวแปรสเกลารถอวาเปนเมทรกซขนาด 1x1 กลาวคอ
มขนาดแนวนอน 1 แถว (row) และแนวตง 1 หลก (column) เชน
>> x=5;
หากตองการทราบวาตวแปรสเกลาร x มขนาดเทาใดกสามารถทาไดโดยใชคาสง size ซงม
รปแบบการใชงาน คอ
[M,N] = SIZE(X)
โดยทพารามเตอร
X คอตวแปรคาคงทใดๆ (เปนไดทงสเกลาร เวกเตอร และเมทรกซ)
M และ
(ข) เวกเตอร คอ เมทรกซขนาด 1 แถว หรอ 1 หลก (row vector) สามารถสรางไดโดยการใช
เครองมอคอมมา (comma) ‘’,” หรอชองวาง (space) ในการแยกสมาชกแตละตวในเวกเตอร
สมมตให x เปนเวกเตอรแถวทมสมาชกเปน x = [1 2 3 4] การกาหนดให x มคาดงกลาว
จะตองทาการปอนคาสงลงในหนาตางคาสงดงน

15
>> x = [1 2 3 4] x = 1 2 3 4 จะสงเกตไดวาสมาชกหรออลเมนตแตละตวในเวกเตอรแถว x จะเขยนแยกกนโดยชองวาง
หากตองการสรางเวกเตอรแนวตง (column vector) y ซงเปนเมทรกซทรานสโพสของ x เวกเตอร
แถว กสามารถทาไดโดยงายดงน
>> y = x'
และผลลพธทไดบนจอแสดงผลคอ
y = 1 2 3 4
(ค) เมทรกซ เมทรกซขนาด mxn คอเมทรกซทมจานวน m แถว และ n หลก เชน
หากตองการกาหนดเมทรกซทมขนาด 3x4 ขนมาใชงานใหกระทาดงน
>> A = [1 2 3 4; 5 6 7 8; 9 10 11 12] A = 1 2 3 4 5 6 7 8 9 10 11 12

16
สงเกตวาเครองหมาย “;” ใชสาหรบระบวาเปนจดสนสดของแตละแถว ถงตรงนอาจใชคาสง “who”
หรอ “whos” เพอขอดตวแปรทงหมด รวมถงขนาดและหนวยความจาของตวแปรแตละตวทไดม
การสรางขนในหนาตางคาสงของโปรแกรม MATLAB
>> who Your variables are: A x y >> whos Name Size Bytes Class A 3x4 96 double array x 1x4 32 double array y 4x1 32 double array ในกรณทตองการทราบขนาดของตวแปรใดตวแปรหนงยกตวอยางเชนตวแปร x ใหใชคาสง >> size(x) และผลลพธทไดบนจอแสดงผลคอ ans = 1 4 ซงบอกเราวา เมทรกซ x มขนาดเทากบ 1x4 คอมเพยงแถวเดยวและมสหลก นอกจากนเราสามารถอางถงหรอกาหนดคาของอลเมนตแตละตวในเมทรกซไดโดยอาศยรปแบบ ดงน

17
>> x=A (2, 3)
x =
7
คาสงนใหนาคาของอลเมนตแถวท 2 และหลกท 3 ของเมทรกซ A ไปบรรจในตวแปร x ทได
กาหนดขนใหม
แตหากตองการอลเมนตทงแถวจากเมทรกซ A เชนตองการอลเมนตทงหมดในแถวท 3 ไปเกบลง
ในเวกเตอร y ทกาหนดขนมาใหมกใหใชคาสงดงน
>> y=A (3, :)
สงเกตวามการใชเครองหมาย “:” เพอระบชวงของคอลมภและผลลพธทไดบนจอภาพคอ
y =
9 10 11 12
นอกจากการกาหนดคาโดยตรงใหกบเวกเตอรแลว ผใชยงสามารถทจะกาหนดคาของเวกเตอรให
มคาเพมขนหรอลดลง โปรแกรม MATLAB จะกาหนดใหเปนคาทเพมขน +1 โดยอตโนมต เชน
>> z = [1:2:10]
z =
1 3 5 7 9
จะเหนไดวาเรมตนทคา 1 แลวเพมทละ 2 จนกระทงถงคามากทสดทไมเกน 10

18
คาสงการลบแถวหรอหลกของเมทรกซกนาสนใจอกเชนเดยวกน สามารถทาไดโดยใชคาสง >> A (1,:)=[ ] คาสงนเปนการลบอลเมนตทงหมดในแถวท 1 ของเมทรกซ A ซงผลลพธเปนดงน A = 5 6 7 8 9 10 11 12 ในโปรแกรม MATLAB การนาเมทรกซหลายชดมาประกอบกนใหไดเปนเมทรกซขนาดใหญขนก
สามารถทาไดและมความสะดวกมาก ยกตวอยางเชน
>> A = [0 0; 1 1; 2 2]; >> B = [3 3; 4 4; 5 5]; >> C = [A B]; เปนคาสงการตอเมทรกซ A และ B ในแนวนอนและไดเปนเมทรกซ C >> C C = 0 0 3 3 1 1 4 4 2 2 5 5 หรอ >> C=[A; B] เปนคาสงการตอเมทรกซ A และ B ในแนวตงและไดเปนเมทรกซ C C = 0 0 1 1

19
2 2 3 3 4 4 5 5 ขอควรสงเกต
1) เมทรกซจตรสเทานนทสามารถหาคาดเทอรมนนตไดโดยใชคาสงพนฐานใน โ ป ร แ ก ร ม
MATLAB ยกตวอยางการหาดเทอรมนนตของงเมทรกซทม 2 แถว 2 หลก
จากสมการ (1.5) bcaddcba
Adcba
A −==⎥⎦
⎤⎢⎣
⎡= )det(; ในโปรแกรม MATLAB
>> A=[2 2; 2 4]; >> det(A) ans = 4 2) เมทรกซใดทมคาดเทอรมนนตไมเทากบ 0 กจะสามารถหาอนเวอรสการคณ ไดโดยใช
คาสงพนฐานในโปรแกรม MATLAB
ยกตวอยางจากสมการท 1.6 ⎥⎦
⎤⎢⎣
⎡−
−=−
acbd
AA
)det(11
>> A=[2 2; 2 4] A = 2 2 2 4 >> inv(A) ans = 1.0000 -0.5000 -0.5000 0.5000

20
1.7.4 คาสงและฟงกชนพนฐานเพอการดาเนนการทางคณตศาสตรในโปรแกรม MATLAB
ตวดาเนนการ (operator) หมายถง ตวกระทาทมผลตอขอมล โดยทวไปสามารถแบงเปน 3 ประเภท อน
ไดแก ตวดาเนนการเลขคณต (arithmetic operator) ตวดาเนนการสมพนธและตรรกะ (relational and
logical operators) และตวดาเนนการระดบบต (bit-wise operator) ใน ลาดบถดไปจะขอกลาวและ
ยกตวอยางแตเพยงตวดาเนนการสองตวแรกทเกยวเนองเชอมโยง ส ม พ น ธ ก บ ฟ ง ก ช น พ น ฐ า นท า ง
คณตศาสตรทใชมากในงานวศวกรรมโยธา
การดาเนนการทเกยวของทางคณตศาสตรทเกยวของในโปรแกรม MATLAB กจะม รปแบบคลาย
กบการดาเนนการทใชโดยทวไปแบบพชคณต ซงจะมรปแบบและลาดบการทางานของตว ดาเนนการจะ
แตกตางกนออกไปขนกบประเภทขอมลดงตอไปน
ก) การดาเนนการทใชในการคานวณทางคณตศาสตรของสเกลาร
ในการคานวณทางคณตศาสตรทเกยวของกบคาคงทหรอของสเกลาร เครองหมายทใชในคาสง
การคานวณแบบพชคณตกบทใชในโปรแกรม MATLAB จะตางกนเลกนอย ตวอยางการ ดาเนนการท
ใชในการคานวณทางคณตศาสตรระหวางคาสเกลารในโปรแกรม MATLAB
>> a=3; >> b=2; >> M = [a+b, a-b, a*b, a\b, a/b, a^b] M = 5.0000 1.0000 6.0000 0.6667 1.5000 9.0000
ซงการดาเนนการดงกลาวสามารถสรปเขยนไดดงตารางท 1.1

21
ตารางท 1.1การดาเนนการทใชในการคานวณทางคณตศาสตรของสเกลาร
การดาเนนการ รปแบบพชคณต รปแบบของ MATLAB
การบวก a+b a+b
การลบ a-b a-b
การคณ axb a*b
การหารซาย ab a\b
การหารขวา ba a/b
การยกกาลง ab a^b
จากตวอยางทแสดงขางตน นอกจากการทางานของตวดาเนนการจะมความสาคญและเรยงลาดบจากซาย
ไปขวาแลว การคานวณทางคณตศาสตรในโปรแกรม MATLAB ยงจาเปนจะตองเปนไปตามลาดบการ
ดาเนนการ “กฎการทากอนหลง” (precedence rule) ซงเมอเขาใจถงลาดบการดาเนนการกจะสามารถ
เขยนคาสงไดในบรรทดเดยว เพอทจะทาการคานวณทางคณตศาสตรทมตาวดาเนนการหลายๆตวได
ตารางท 3.2 และตวอยางขางลางแสดงถงลาดบการทางานของตวดาเนนการ
>> y=10+2*3-4+9/3^2*2-1 y = 13 >> y=10+(2*3)-4+(9/(3^2))*2-1 y = 13
22
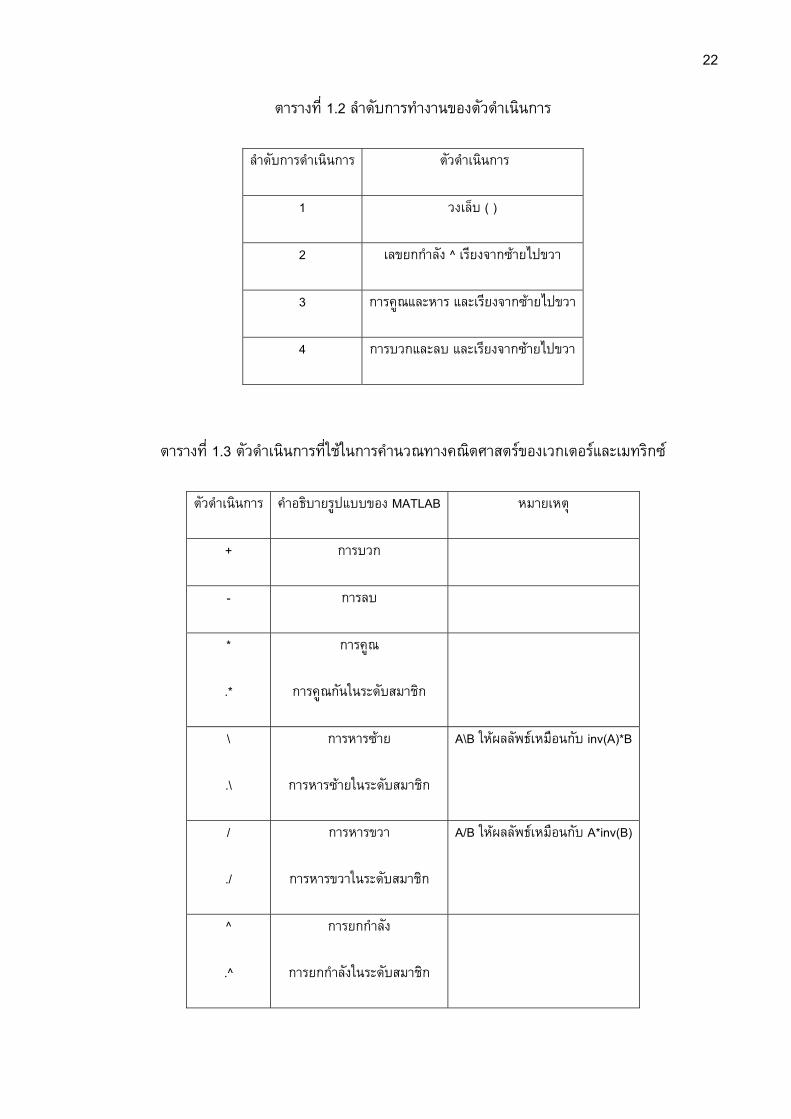
ตารางท 1.2 ลาดบการทางานของตวดาเนนการ
ลาดบการดาเนนการ ตวดาเนนการ
1 วงเลบ ( )
2 เลขยกกาลง ^ เรยงจากซายไปขวา
3 การคณและหาร และเรยงจากซายไปขวา
4 การบวกและลบ และเรยงจากซายไปขวา
ตารางท 1.3 ตวดาเนนการทใชในการคานวณทางคณตศาสตรของเวกเตอรและเมทรกซ
ตวดาเนนการ คาอธบายรปแบบของ MATLAB หมายเหต
+ การบวก
- การลบ
*
.*
การคณ
การคณกนในระดบสมาชก
\
.\
การหารซาย
การหารซายในระดบสมาชก
A\B ใหผลลพธเหมอนกบ inv(A)*B
/
./
การหารขวา
การหารขวาในระดบสมาชก
A/B ใหผลลพธเหมอนกบ A*inv(B)
^
.^
การยกกาลง
การยกกาลงในระดบสมาชก
23
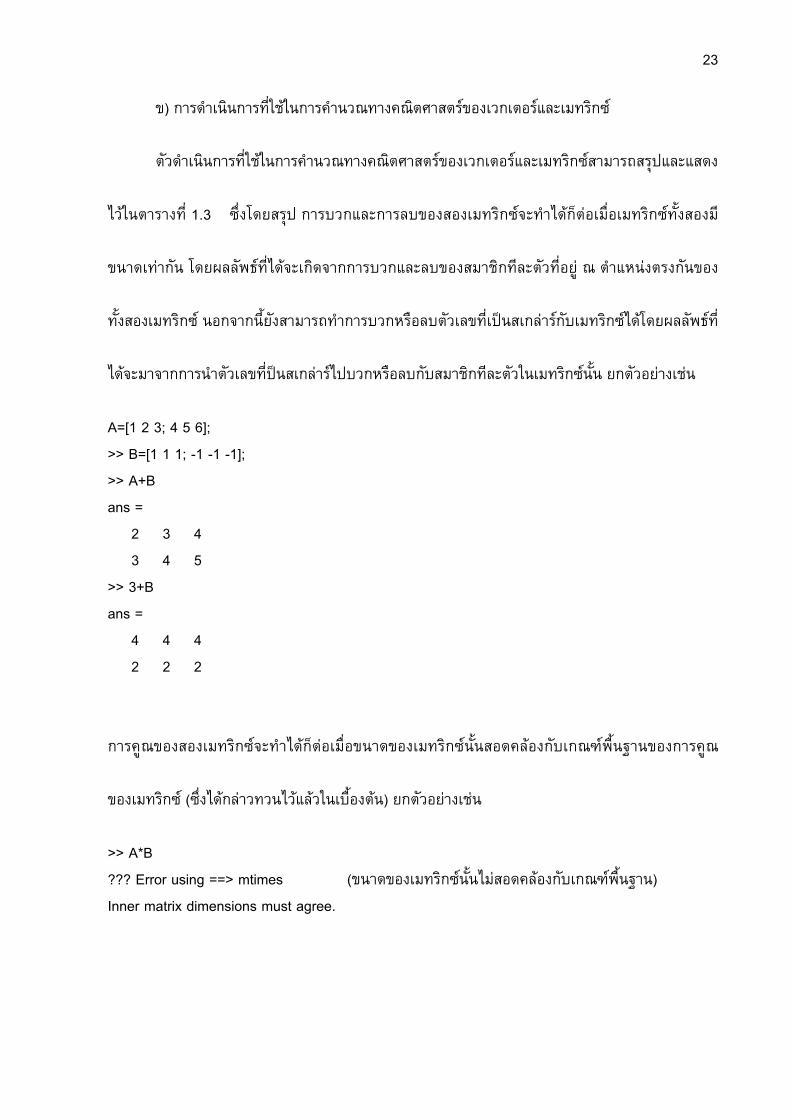
ข) การดาเนนการทใชในการคานวณทางคณตศาสตรของเวกเตอรและเมทรกซ
ตวดาเนนการทใชในการคานวณทางคณตศาสตรของเวกเตอรและเมทรกซสามารถสรปและแสดง
ไวในตารางท 1.3 ซงโดยสรป การบวกและการลบของสองเมทรกซจะทาไดกตอเมอเมทรกซทงสองม
ขนาดเทากน โดยผลลพธทไดจะเกดจากการบวกและลบของสมาชกทละตวทอย ณ ตาแหนงตรงกนของ
ทงสองเมทรกซ นอกจากนยงสามารถทาการบวกหรอลบตวเลขทเปนสเกลารกบเมทรกซไดโดยผลลพธท
ไดจะมาจากการนาตวเลขทปนสเกลารไปบวกหรอลบกบสมาชกทละตวในเมทรกซนน ยกตวอยางเชน
A=[1 2 3; 4 5 6]; >> B=[1 1 1; -1 -1 -1]; >> A+B ans = 2 3 4 3 4 5 >> 3+B ans = 4 4 4 2 2 2
การคณของสองเมทรกซจะทาไดกตอเมอขนาดของเมทรกซนนสอดคลองกบเกณฑพนฐานของการคณ
ของเมทรกซ (ซงไดกลาวทวนไวแลวในเบองตน) ยกตวอยางเชน
>> A*B ??? Error using ==> mtimes (ขนาดของเมทรกซนนไมสอดคลองกบเกณฑพนฐาน) Inner matrix dimensions must agree.

24
>> A*B' ans = (ขนาดของเมทรกซนนสอดคลองกบเกณฑพนฐานจงสามารถคานวณได) 6 -6 15 -15
สวนเครองหมายการคณ “.*” ในระดบสมาชก (element wise multiplication) นนหมายถงการนาสมาชกท
อยในตาแหนงเดยวกนของทงสองเมทรกซมาคณกน ซงจะทาไดตอเมอเมทรกซทงสองมขนาดเทากน
นอกจากนยงสามารถทาการคณโดยตวเลขทเปนสเกลารกบเมทรกซไดโดยผลลพธทไดจะมาจากการนา
ตวเลขทปนสเกลารไปคณกบสมาชกทละตวในเมทรกซนน เชนจากตวอยางเดม
>> A.*B ans = 1 2 3 -4 -5 -6 >> 2.*B ans = 2 2 2 -2 -2 -2 เปนททราบกนดวาเครองหมายหารมประโยชนมากในการแกปญหาทางคณตศาสตร ดงนนในสวนนจะขอ
แสดงการประยกตใชงานเครองหมายหารในการแกสมการ 2 ตวแปรดงตอไปน
ถาตองการแกสมการเพอหาคาตวแปร 1x และ 2x จากสมการ
332
21
21
=−=+
xxxx

25
ถาใชหลกสมการในการแกปญหาทางคณตศาสตรสองตวแปรทวไปเพอแกสมการ จะไดวา 1x = 2 และ
2x = -1 เชนเดยวกนสมการทงสองสามารถทจะหาคาตอบไดโดยใชเมทรกซ ซงจากสมการสามารถเขยน
ใหอยในรปของเมทรกซไดดงน
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡− 3
311
12
2
1
xx หรอ Ax=b
โดยท A = ⎥⎦
⎤⎢⎣
⎡−1112 , x = ⎥
⎦
⎤⎢⎣
⎡
2
1
xx
และ b= ⎥⎦
⎤⎢⎣
⎡33
การหาผลเฉลยของสมการขางตนสามารถทาไดโดยการนาอนเวอรสการคณของ A (A-1) คณเขาไปทงสอง
ขางของสมการซงจะไดผลลพธเปน x = A-1b ซงถาใชโปรแกรม MATLAB ในการหาผลเฉลยของสมการ
ขางตนกสามารถทาโดยชดคาสงดงตอไปน
>> A=[2 1; 1 -1]; >> b=[3; 3] >> x=inv(A)*b x = 2 -1 >> x=A\b x = 2 -1 คาสงพนฐานนอกเหนอจากนสามารถหาอานไดจากคมอการใช (Help) ในโปรแกรม MATLAB

26
(ค)ตวดาเนนการสมพนธและตรรกะ (relational and logical operator) จะใชในการเปรยบเทยบ
ความสมพนธของคาตวแปรทงทเปนสเกลารและเมทรกซ โดยทตวแปรทงสองดานของตวดาเนนการ
จะตองมขนาด (หรอมต) เทากน ในกรณทตวแปรทตองการเปรยบเทยบเปนเมทรกซ การเปรยบเทยบจะ
กระทาในระดบสมาชกแบบหนงตอหนง ในโปรแกรม MATLAB ไดเตรยมตวดาเนนการสมพนธและตรรกะ
ไวดงสรปทงหมด 6 แบบ ดงตารางท 1.4
ตารางท 1.4 ตวดาเนนการสมพนธและตรรกะทใชในโปรแกรม MATLAB
ตวดาเนนการสมพนธใน MATLAB คาอธบาย
== เทากบ
< นอยกวา
> มากกวา
<= นอยกวาเทากบ
>= มากกวาเทากบ
~= ไมเทากบ
(ง)ฟงกชนพนฐานทางคณตศาสตร ในสวนนจะกลาวถง ฟงกชนพนฐานทเกยวกบการแกปญหา
ทางคณตศาสตรพนฐานในงานวศวกรรม อนไดแก ฟงกชนพนฐานทเกยวกบตวเลข ฟงกชนตรโกณมต
ฟงกชนสาหรบเมทรกซ

27
ตวอยางฟงกชนพนฐานทเกยวกบตวเลข ทใชบอยในโปรแกรม MATLAB สามารถสรปไว ดงตารางท 1.5
ตารางท 1.5 ตวอยางฟงกชนพนฐานทเกยวกบตวเลขทใชในโปรแกรม MATLAB
ตวดาเนนการสมพนธใน MATLAB คาอธบาย
abs(x) การหาคาสมบรณ (absolute value) ของตวแปร x
sqrt(x) การหารากทสอง (square root) ของตวแปร x
int(x) การหาคาจานวนเตมของตวแปร x
conj(x) การหาคาจานวนเชงซอนของตวแปร x
sign(x) การหาคาเครองหมายของตวแปร x
round(x) การหาคาจานวนเตมทมคาใกลกบคา x มากทสด
real(x), imag(x) การหาคาจานวนจรง, จานวนจนตภาพของตวแปร x
ตวอยางฟงกชนเลขชกาลงและลอการทม ทใชบอยในโปรแกรม MATLAB สามารถสรปไว ดงตารางท 1.6
ตารางท 1.6 ฟงกชนเลขชกาลงและลอการทม
ลาดบการดาเนนการ ตวดาเนนการ
exp(x) หาคา ex ของตวแปร x
log(x) หาคา log ฐาน e ของตวแปร x
log2(x) หาคา log ฐาน 2 ของตวแปร x
log10(x) หาคา log ฐาน 10 ของตวแปร x

28
ตวอยางฟงกชนพนฐานทเกยวกบฟงกชนตรโกณมต ทใชบอยในโปรแกรม MATLAB สามารถสรปไว ดง
ตารางท 1.7
ตารางท 1.7 ตวอยางฟงกชนฟงกชนตรโกณมตทใชในโปรแกรม MATLAB
ตวดาเนนการสมพนธใน MATLAB คาอธบาย
sin(x), sinh(x) การหาคา sine และ hyperbolic sine ของตวแปร x*
cos(x), cosh(x) การหาคา cosine และ hyperbolic cosine ของตวแปร x
tan(x), tanh(x) การหาคา tangent และ hyperbolic tangent ของตวแปร x
asin(y), asinh(y) การหาคา sine inverse และ hyperbolic sine inverse ของตวแปร y*
acos(y), acosh(y) การหาคา cosine inverse และ hyperbolic cosine inverse ของตวแปร y
atan(y), atanh(y) การหาคา tangent และ hyperbolic tangent inverse ของตวแปร y
หมายเหต* x และ y มหนวยเปน radian
ตวอยางฟงกชนพนฐานทางสถต ทใชบอยในโปรแกรม MATLAB สามารถสรปไว ดงตารางท 1.8
ตารางท 1.8 ฟงกชนพนฐานทางสถต ทใชบอยในโปรแกรม MATLAB
ลาดบการดาเนนการ ตวดาเนนการ
min(x), max(x) หาคาตาสด สงสดของตวแปร x
mean(x), median(x) หาคาเฉลยและคามธยฐานของตวแปร x
stdev(x), sort(x) หาคาเบยงเบนมาตรฐาน และเรยงลาดบตวแปร x
sum(x), prod(x) หาคาผลบวกสะสมและผลคณตวเลขทงหมดของตวแปร x

29
1.8 เทคนคการประยกตใชโปรแกรม MATLAB เพอการแกปญหาระบบสมการเชงเสนทเกยวของ
กบงานทางวศวกรรมโยธา – กรณศกษา (การวเคราะหโครงขอหมน 2 มต)
โครงขอหมนเปนโครงสรางทประกอบดวยชนสวนบาง, ยาว ตอกนทปลายดวยการเชอม
(Welding) หรอยดดวยสลกเกลยวเขากบแผนปะกบ (Gusset Plate) วสดทใชประกอบเปนโครงขอหมน
มกจะใชไม แทงเหลก เหลก ชนสวนของโครงขอหมนจะตองประกอบและตอกนอยางแขงแรงและม
เสถยรภาพ จากรปท 1-4(a) จะเหนวาโครง ABCD จะตองพงทลายถาไมมชนสวน AC มาชวยยดไว
รปแบบทมเสถยรภาพมากทสดคอรปสามเหลยม ดงนน simple truss จะเรมตนดวยสามชนสวนตอกน
เปนรปสามเหลยม เชน ABC ดงในรปท 1-4 (b) แลวสรางตอไปดวย
รปท 1.4 โครงขอหมน 2 มต
ในการวเคราะหโครงขอหมนเมอมแรงภายนอก [P] มากระทา สงทตองการจะหากคอ แรงทฐานรองรบ
และแรงภายในทกชนสวน [f] ซงมจานวนเทากบจานวนของชนสวน เนองจากทกชนสวนจะรบแรงตาม
แกนอยางเดยว และในทกขอตอแรงจะอยในระนาบเดยวกนและมจดรวมเดยวกน หมายความวาไมม

30
โมเมนตเขามาเกยวของททกตาแหนง ดงนนสมการสมดลซงแสดงถงความสมพนธระหวาง [P] และ [f] ท
ตองตรวจสอบกคอสมการของแรงในสองแกน (ผลรวมของแรงในแนวดงและแนวราบ) ดงนนเราสามารถ
จะตงสมการสมดลซงอยในรปของสมการเชงเสนททกขอตอ [B][f] = [P] ไดดงตวอยางเชน
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−2500
030sin130cos
2
1
FF ⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ −750
0060sin160cos
2
3
FF
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ −1000
060sin30sin60cos30cos
3
1
FF
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
0254.8660127.433000.500
3
2
1
FFF
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−2500
030sin130cos
2
1
FF ⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ −750
0060sin160cos
2
3
FF
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ −1000
060sin30sin60cos30cos
3
1
FF
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
0254.8660127.433000.500
3
2
1
FFF
รปท 1.5 ตวอยางการวเคราะหโครงขอหมน 2 มต (local)
จากรปท 1.5 เราสามารถตงสมการสมดลในรปของสมการเชงเสนททกขอตอ [B][f] = [P] ในรปของเมท
รกซยอย(local) และแกสมการเพอหา [f] ซงในทนกคอแรงภายใน F1, F2, F3 ทกชนสวนไดทละขอตอ

31
จากตวอยางเดยวกน เราสามารถตงสมการสมดลซงอยในรปของสมการเชงเสนททกขอตอในรป
ของเมทรกซรวม (global) ดงรปท 1.6 ในรป [B][f] = [P] และแกสมการเพอหา [f] ซงในทนกคอแรงท
ฐานรองรบ H1, V2, V3 บวกกบแรงภายใน F1, F2, F3 ทกชนสวนไดในทกขอตอพรอมกน
- H2
- V2
- V3
- H2
- V2
- H2
- V2
- H2
- V2
- V3- V3- V3
รปท 1.6 ตวอยางการวเคราะหโครงขอหมน 2 มต (global)
จะเหนไดวาการแกปญหาโจทยดงกลาวจาเปนจะตองหาอนเวอรสการคณของเมทรกซซงหากเปน
เมทรกซยอยขนาด 2x2 อนเวอรสการคณของเมทรกซกสามารถทาไดโดยงายแตเมอเปนเมทรกซรวม
ขนาด 6x6 การหาอนเวอรสการคณของเมทรกซกสามารถทาไดแตมระยะเวลานาน
Coefficients of F1, F2, F3, H2, V2, V3
F1F2F3H2V2V3
=
Coefficients of F1, F2, F3, H2, V2, V3
F1F2F3H2V2V3
=

32
เพอใหสามารถแกปญหาเราสามารถประยกตใชโปรแกรม MATLAB เพอการแกปญหาดงกลาวไดดงน
เชนเดยวกบภาษาคอมพวเตอรอนๆเชน C, Fortran, Basic เราสามารถเขยนโปรแกรม Matlab ในรปของ
M-files เพอการคานวณ รบคา และ เกบคาเพอการแสดงผลดงน
ตงสมการสมดลของทกขอตอ จะไดวา
รปท 1.7 ตวอยางการวเคราะหโครงขอหมน 2 มต โดยโปรแกรม Matlab ในรปของ M-files

33
1.9 แบบฝกหด จงใชวธทเรยนมาวเคราะหหาแรงทฐานรองรบและแรงภายในทกชนสวนของโครงขอหมน 2 มตตอไปน
กาหนด
a =10 ft, b = 4 ft, p = 2 kip, q = 3 kip, and r = 3 kip

บทท 2
เทคนควเคราะหเชงตวเลขเพอ การประมาณคาในชวงและการประมาณเสนโคงทเหมาะสม
2.1 บทนา
การประมาณคาในชวง (Interpolation) และการประมาณเสนโคงทเหมาะสม (Curve Fitting) นนม
ความสาคญอยางมากในกระบวนการวดและทดสอบโครงสรางในงานทางวศวกรรม ยกตวอยางเชน
อปกรณทใชในการวดแรงนน โดยทวไป จะใช Load Cell ซง แรงทกดบน Load Cell นนจะถก
เปรยบเทยบในรปสญญาณไฟฟา เพออานคาจาก indicator โดยคาinput (แรงทกด) และ output (คาท
อานได) ดงรปท 2.1
รปท 2.1 กระบวนการวดและทดสอบแรงในงานทางวศวกรรม
แรงทกด (X) และคาทอานได (Y) เปนชดขอมลทเราทราบ ความสมพนธระหวางแรงทกด (X) และคาท
อานได (Y) ฟงกชนทอยในรป y(x) = ax + b โดยการประมาณคาในชวง หรอการประมาณเสนโคงท

35
เหมาะสมทผานยานของชดขอมลทใกลเคยงทสดเปนสงทเราตองการหาทงนเพอจะสามารถนาไปสการ
คานวณหาแรงทกด ณ ตาแหนงคาทเราไมรหรออานไมได
2.2 วธการประมาณเสนโคงทเหมาะสม (Curve Fitting Methods)
การประมาณเสนโคงทเหมาะสมมดวยกนหลายวธในทนจะแนะนาเพยง 3 วธทเปนทนยม อนไดแก
วธ Linear Regression, วธ Polynomial Regression และ วธ Multiple Linear Regression
2.2.1 วธ Linear Regression โดย Least Square Approximation สมมตให (xi, Yi), i = 1, 2, . . . , n เปนชดขอมลทเราทราบ เราตองการหาฟงกชน y = f(x) ทผาน
ชดขอมลดงกลาว ตวอยางเชนเรามชดขอมลดงตาราง และตองการหาเสนตรงทผานชดขอมลดงกลาวดง
รปท 2.2
รปท 2.2 การประมาณเสนโคงทเหมาะสมวธ Linear Regression โดย Least Square Approximation

36
สตรสมการเสนตรงใดๆคอ
y = α x + β ------------------------------------------------- (2.1)
ดงนนเราตองการหาคาของ α , β ททาใหสมการเสนตรงนผานยานของชดขอมลทใกลเคยงทสด
พจารณาสาหรบแตละจด (xi, yi), i = 1, 2, . . . , n ทโจทยกาหนดมาให เราตองการ
หาฟงกชนทอยในรป y(x) = α x + β ทผานยานของชดขอมลทใกลเคยงทสด จาก
ตวอยางขางตนทราบวา y(x) = 702.2 + 3.4x
เพอความสะดวกในการเขยนเราจะกาหนดให yi = y(xi) และ คาความผดผลาด error
สาหรบแตละ i =1, 2, . . . , n คอ
|y - yi| = ei
สงทเราตองการคอ สาหรบแตละ i = 1, 2, . . . , n
ei ≈ 0
หลกการของ Least square คอตองการหา a, b ของสมการท 2.1 เพอใหคา (คาความผดผลาด error) 2 ม
คานอยทสด
เราสามารถหาคา minimum ของ Sr ไดจากเงอนไข

37
จดใหสมการขางตนเทากบ 0 จะไดวา
เพราะ จดรปสมการขางตนใหมจะไดวา
ซงเปนระบบสมการเชงเสนสองสมการ สองตวแปรคอ α และ β คาตอบของระบบสมการคอ
หลงจากหาคาตอบของระบบสมการน ซงกคอ α และ β แลวนาเอาคาตอบทไดไปแทนลงใน
y = α x + β กจะไดสมการเสนตรงทเราตองการ

38
ตวอยาง
คาถาม จะทราบไดอยางไรวาประมาณเสนโคงขางตนนนถกตองแมนยา ตอบ เราสามารถดไดจากสมประสทธความเชอมน, coefficient of determination (r2)

39
สรปวาคาสมการประมาณโคงทไดนนถกตองและใกลเคยง 86.8% คาถาม หากเราตองการกาหนดความเชอมนถกตองและใกลเคยง เปน % ทตองการจะทาไง ตอบ เราสามารถใชคา CI, Confidence Interval

40

41

42

43
* การประยกตใชโปรแกรม MATLAB เพอการประมาณเสนโคงทเหมาะสมวธ Linear Regression
โดย Least Square Approximation
เราสามารถประยกตใชโปรแกรม MATLAB เพอการประมาณเสนโคงทเหมาะสมวธ Linear
Regression โดย Least Square Approximation โดยใชคาสง “regress” ใน Matlab ตวอยางเชน
จงประมาณเสนโคงทเหมาะสมวธ Linear Regression โดย Least Square Approximation ของชดขอมล
การกระทาใน Matlab เรมจากการสรางเมทรกซชดขอมลและแสดงผลโดลคาสง plot จะไดวา

44
เสรจแลวใชคาสง regress ดงน

45

46

47
2.2.2 วธ Polynomial Regression โดย Least Square Approximation จากตวอยางทผานมา เราประมาณเสนโคงดวยสมการเสนตรง linear function แตในความเปน
จรงแลวชดขอมลทไดมานน เมอนามา plot graph แลว อาจจะไมเรยงกนอยในแนวเสนตรง ดงนนถาเอา
linear function มา fit curve ของชดขอมลนแลว กจะไมสอดคลองกบความเปนจรงหรอ error คอนขางสง
โดยทวไปแลว continuous function ใดๆทสามารถหาอนพนธไดทกอนดบทเราตองการหานน สามารถ
เขยนใหอยในรป Taylor series ได และสามารถประมาณคาของ functionทอยในรปของ Taylor series
ดวย polynomial function degree m ดวยเหตน เราสามารถใช polynomial function degree m มา fit
curve ได โดยใชหลกการเดยวกน เรมจาก polynomial function degree 2
จดรปใหมจะได

48
ตวอยาง จงประมาณการชดขอมลตอไปนดวย วธ Polynomial Regression โดย Least Square
Approximation

49
เชนเดยวกนกบวธแรกเราสามารถประยกตใชโปรแกรม MATLAB เพอการประมาณเสนโคงท
เหมาะสมดวยวธ Polynomial Regression โดย Least Square Approximation โดยใชคาสง “polyfit” และ
ใชคาสง “polyval”ใน Matlab จากตวอยางขางตน

50
2.2.3 วธ Multiple Linear Regression โดย Least Square Approximation
วธนจะแตกตางจากสองวธแรก กเพยงแตท model equation ดงน
ตวอยางการประมาณการเสนโคงดวยวธ Multiple Linear Regression โดย Least Square
Approximation
และตวอยางการกระทาใน Matlab

51
2.3 วธการประมาณคาในชวง (Interpolation)
จากขางตนเราไดกลาวถงวธการประมาณเสนโคงหรอ Curve Fitting ไปแลวซงจะแตกตางกบ
วธการประมาณคาในชวง (Interpolation) อธบายไดดงรปทแสดงขางลางน
ซงโดยสรป การประมาณคาในชวง (interpolation) คอกระบวนการหาฟงกชน (โดยสวนใหญเปน
ฟงกชนพหนาม) ทกราฟของฟงกชนนนผานจด (x, y)ตอไปจะไดกลาวถง วธการประมาณคาในชวง ซงม
ดวยกน 4 วธดวยกน มาเรมจากวธทหนง
2.3.1 การประมาณคาในชวงเชงเสน (Linear Interpolation) เปนวธทงายทสด วธนใหฟงกชน
ประมาณเปนสมการเสนตรงทลากเชอมระหวางจด 2 จด ซงแสดงดวย )()( 0101 xxCCxf −+= โดยท
10 ,CC เปนคาคงตวทไมรคา ท x = x0 : f(x0) = C0+0 = C0 และ ท x = x1 : f(x1) = C0+C1(x- x0) = f(x0)
+C1(x- x0) => C1 = [f(x1) –f (x0)]/[x1- x0] อธบายสมการขางตนไดดงรป

52
จะเหนไดวาหากเรารคาทแทจรงเรากสามารถคานวณคา % ความผดพลาดได
2.3.2 การประมาณคาในชวงกาลงสอง (Quadratic Interpolation) วธนใหฟงกชนประมาณเปน
ฟงกชนกาลงสอง ))(()()( 1020101 xxxxbxxbbxf −−+−+= โดยท 10 ,bb และ 2b เปนคาคงตวท
ไมรคา ท x = x0 : f(x0) = b0+0 = b0 และ ท x = x1 : f(x1) = b0+b1(x- x0) = f(x0) +b1(x- x0)
=> b1 = [f(x1) –f (x0)]/[x1- x0] และ ท x = x2 : f(x2) = b0+b1(x2- x0) +b2(x2- x0)( x2- x1) และคา
b2=
ตวอยาง

53
2.3.3 การประมาณคาในชวงฟงกชนพหนาม (Polynomial Interpolation) หากเรามขอมล n+1 จด
ทตาแหนง x0, x1,…, xn ดงรป
วธนใหฟงกชนประมาณเปนฟงกชนพหนามอนดบ n
))()(())(()()( 21031020101 xxxxxxcxxxxcxxccxf −−−+−−+−+=
))...()((.... 110 −−−−++ nn xxxxxxc
การหาคาคงท สามารถทาไดดงตอไปน

54
ตวอยาง

55
ใน Matlab เราสามารถทาการประมาณการในชวงโดยใชคาสง “interp1” ซงการกาหนดคาจะอย
ในรปคลายกบสมการเบองตนแตอยในรปเมทรกซของลากรานจดงแสดงในตวอยาง

56

บทท 3
เทคนควเคราะหเชงตวเลขเพอการแกสมการเชงอนพนธแบบสามญ
3.1 บทนา

58
รปท 3.1 ผลเฉลยของ xydxdy
=
ระเบยบวธเชงตวเลขสาหรบการหาผลเฉลยของสมการเชงอนพนธคอ การประมาณ
ชดของจดทผาน หรออยบนคาตอบของสมการเชงอนพนธภายใตเงอนไขคาเรมตน (x0, y0)
ทกาหนดมาใหนนเอง ซงมขนตอน ดงน
1. สาหรบจด (x0, y0) ใดๆ เราพจารณาชวงเลกๆจาก x ไปยง x1 ซงมความกวางเปน h
2. และพยายามประมาณคา y ทอยบรเวณจด (x1, y1) ทผานหรออยบนจด (x0, y0)

59
เหตผลทวาทาไมตองใชระเบยบวธเชงตวเลขเพอหาคาตอบของสมการเชงอนพนธคอ ในบางครงการหา
คาตอบโดยวธวเคราะหนนยากมาก และตองเสยเวลาในการหาผลเฉลยแตละครง
ในการศกษาหาระเบยบวธเชงตวเลขเพอหาคาตอบของสมการเชงอนพนธนนเรานยมทจะศกษาและ
เปรยบเทยบกบคาตอบทไดจากวธวเคราะห ควบคกนไป เพอใหเหนจดเดนและดอยของแตละวธได
ชดเจนยงขน
3.2 วธของ Euler
รปท 3.2 แนวคดของวธ Euler กรณหนงชวง

60
รปท 3.3 แนวคดของวธ Euler กรณหลายชวง

61
ตวอยาง จงหาคาตอบเชงตวเลขของสมการเชงอนพนธตอไปนโดยใชวธของ Euler และ
เปรยบเทยบกบคาตอบทแทจรง
ใน Matlab เราสามารถใชชดคาสง odeEuler.m เพอการแกปญหาโจทย
จากตวอยางขางตน ใน Matlab

62
3.3 วธของ Huen’s Method (Predictor-Corrector Approach)

63
รปท 3.4 แนวคดของวธ Heun
ตวอยาง จงหาคาตอบเชงตวเลขของสมการเชงอนพนธตอไปนโดยใชวธของ Heun และ
เปรยบเทยบกบคาตอบทแทจรง

64
ใน Matlab เราสามารถใชชดคาสง odeHeun.m เพอการแกปญหาโจทย
จากตวอยางขางตน ใน Matlab

65
เปรยบเทยบกบวธ Euler

66
3.4 วธ Runge-Kutta (RK Method)
รปท 3.5 แนวคดของวธ Runge-Kutta

67
เนองจากการใชคาความชนในการหาคาคาตอบเชงเสน ในบางกรณเราสามารถเรยกวธนวาวธการเฉลย
ความชนแบบมนาหนก Weighted Average โดยมรปสมการทวไปดงน
Third-order RK Method

68
จะเหนไดวา เรามหลายทางเลอกในการกาหนดนาหนก Weightและความสาคญของคาความชนแบบม
นาหนก และแตละวธกจะเรยกชอแตกตางกนไปเปนลาดบ ทเปนทนยมทสดคอ RK ลาดบท 4 ซงจะม
สมการความสมพนธดงน
ตวอยาง จงหาคาตอบเชงตวเลขของสมการเชงอนพนธตอไปนโดยใชวธ RK ลาดบท 4 และเปรยบเทยบ
กบคาตอบทแทจรง

69
ใน Matlab เราสามารถใชชดคาสง odeRK4.m เพอการแกปญหาโจทย
จากตวอยางขางตน ใน Matlab

70
3.5 แบบฝกหดทบทวน

บทท 4
เทคนควเคราะหเชงตวเลขเพอการอนทรกรลเชงตวเลข
4.1 บทนา
โดยทวไปแลวมสองสาเหตหลกๆทเราจาเปนตองศกษาอนทกรลเชงตวเลขคอ การอนท
เกรตโดยวธวเคราะหนนทาไดยากหรอในบางครงอาจะหาไมไดกได ในบางกรณเราทราบแต
ขอมลทเปนตวเลข และตองการหาคาอนทกรลของฟงกชนทสอดคลองกบขอมลเชงตวเลขนน
อนทกรลเชงตวเลขจะใชความหมายทางเรขาคณตของอนทกรลจากดเขต คอ พนทใตกราฟของ
ฟงกชนทเราตองการอนทเกรตมาประยกตใช โดยแบงสวนของพนทใตกราฟออกเปนสวนยอยๆ
หลงจากนน กประมาณคาหาพนทแตละสวนยอยแลวนามารวมกนเรากจะไดคาประมาณของ
อนทกรลจากดเขตทตองการ
รปท 4.1: กราฟแสดงแนวคดของอนทกรลเชงตวเลข

72
อยางไรกตามคาตอบทไดโดยระเบยบวธเชงตวเลขนเปนคาตอบโดยประมาณ ไมใชคาตอบท
แทจรงแตอยางใด ดงนนเราจงจาเปนทจะตองทราบขอบเขตคาคลาดเคลอนของแตละวธทเราได
ศกษา

73
ทบทวน Taylor Series
Taylor series of a function
Taylor series expansions for some common functions

74
ตวอยาง
จาก Taylor series ทราบวา
จากตวอยางเราพบวาการใช Taylor series มาชวยในการประมาณคาอนทกรลนน
คอนขางยงยาก หากฟงกชนทนามาอนทเกรตนนอยในรปแบบทซบซอนดงนน เราจงนาเอาการ
ประมาณคาในชวงมาชวยในการประมาณคาฟงกชนกอนการอนทเกรต นนคอ
ซงในทนเราจะพจารณาเฉพาะกรณทระยะหางของแตละชวงยอยในการอทเกรตนน มคาเทากน
ทงหมด ทงนเพอความสะดวกในการคานวณนนเอง

75
4.2 การประมาณคาอนทกรลในชวงโดยฟงกชนเชงเสนหรอวธ Trapezoidal rule
รปท 4.2: กราฟแสดงแนวคดการประมาณอนทกรลเชงตวเลขดวยวธ Trapezoidal Rule

76
ตวอยาง จงประมาณคาของ
วธทา
จากตวอยางจะเหนไดวาการประมาณคามความคลาดเคลอน เพอเพมความแมนยาของการ
ประมาณคาของอนทรกลนไดคอ การแบงชวงของการอนทเกรตออกเปนชวงยอยๆแลวใช
Trapezoidal rule มาชวยในการประมาณคา เชน แบงชวงของการอนทเกรตออกเปนชวงยอยๆ
โดยทแตละชวงยอยมความกวางเทาๆกน วธดงกลาวกเรยกวา Multiple Application
Trapezoidal Rule หรอ Composite Trapezoidal Rule

77
รปท 4.3: กราฟแสดงแนวคดการประมาณอนทกรลเชงตวเลขวธ Composite Trapezoidal Rule
4.3 พนฐานการประมาณคาอนทกรลโดยฟงกชนใน Matlab
การประมาณคาอนทกรลใน Matlab โดยทวไปนนสามารถทาไดโดยการใชคาสง “int” ซง
สามาถทาการอนทเกรตไดทงแบบสญญลกษณ แบบชวงปด และสามารถทาการคานวณ
คาไดอตโนมต การใชคาสง “int” แสดงดงตวอยางขางลาง
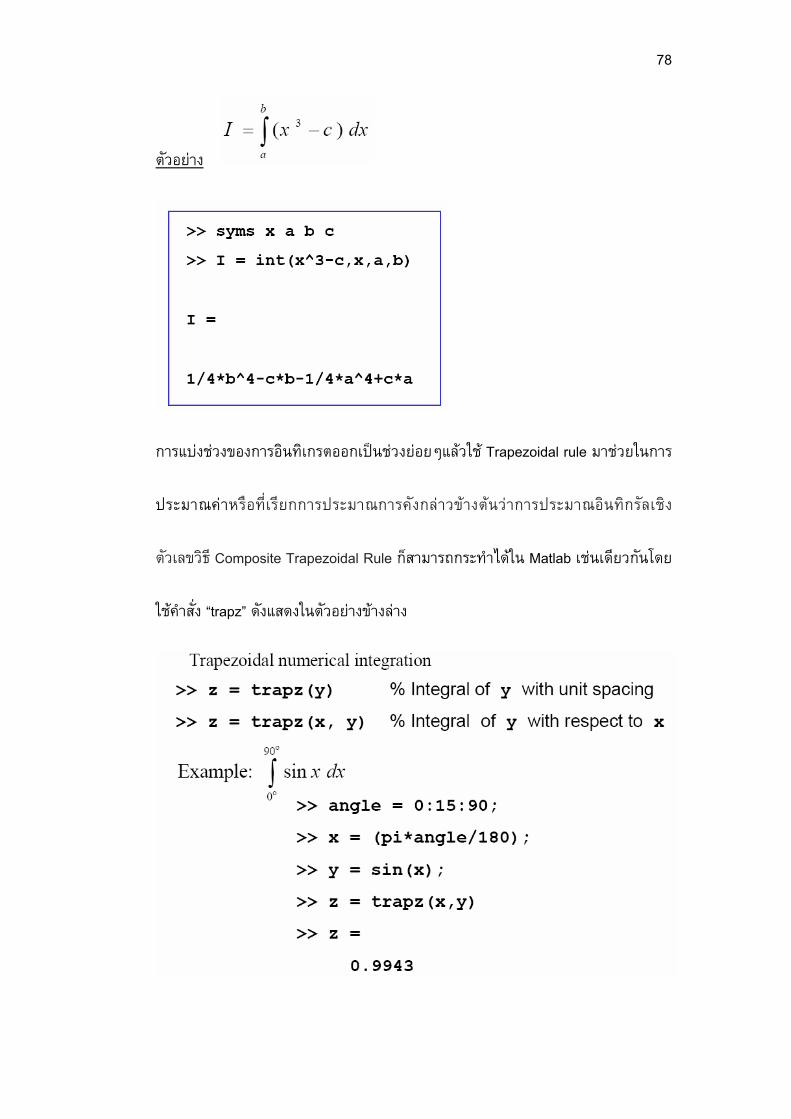
78
ตวอยาง
การแบงชวงของการอนทเกรตออกเปนชวงยอยๆแลวใช Trapezoidal rule มาชวยในการ
ประมาณคาหรอทเรยกการประมาณการคงกลาวขางตนวาการประมาณอนทกรลเชง
ตวเลขวธ Composite Trapezoidal Rule กสามารถกระทาไดใน Matlab เชนเดยวกนโดย
ใชคาสง “trapz” ดงแสดงในตวอยางขางลาง

79
4.4 การประมาณคาอนทกรลในชวงโดยวธ Simpson’s rule
4.4.1 วธ Simpson’s 1/3 rule

80

81
4.4.2 วธ Simpson’s 3/8 rule
การประมาณอนทกรลเชงตวเลขจากสตรขางตนมชอเรยกวา “Simpson’s 1/3 Rule” ซง
ทาการประมาณคาอางองจากขอมล 3 จดหากมการอางองจากขอมล 4 จดการประมาณ
อนทกรลเชงตวเลขกจะมชอเรยกวา “Simpson’s 3/8 Rule” และมสตรการประมาณการดงน
รปท 4.4: กราฟแสดงแนวคดการประมาณอนทกรลเชงตวเลขวธ Simpson’s 1/3 และ 3/8 Rule

82
เชนเดยวกบวธ Trapezoidal Rule เราสามารถแบงชวงอนทเกรตออกเปนชวงยอย แลว
จงทาการประมาณคาดวยวธ Simpson’s Rule เพอใหเกดความแมนยาของการประมาณสงขน
สรปไดวา

83
4.5 การวเคราะหคาความคลาดเคลอนสาหรบวธ Trapezoidal rule
จากทกลาวไปแลววาเทคนคตางๆสามารถทาไดเพอเพมความแมนยาหากแตยงมความ
คลาดเคลอนเมอเทยบกบคาทไดทางทฤษฎ

84

85
4.6 การวเคราะหคาความคลาดเคลอนสาหรบวธ Simpson’s rule
เชนเดยวกบวธ Trapezoidal Rule วธ Simpson’s rule กมคาความคลาดเคลอนเมอเทยบ
กบคาทไดทางทฤษฎเชนเดยวกน แนวทางพสจนกคลายกบคาความคลาดเคลอนทวเคราะหได
จากวธ Trapezoidal Rule ซงจะขอละไว ณ ทน
โดยคาความคลาดเคลอนสาหรบวธ Simpson’s 1/3 และ Simpson’s 3/8 สามารถหาได
จากตารางทแสดงขางลาง
จากตารางไดมการเปรยบเทยบคาความคลาดเคลอนของวธ Simpson’s 1/3 และ Simpson’s
3/8 ไวดวย จะเหนไดจากสตรสาหรบการคานวณคาคลาดเคลอนวาคาความคลาดเคลอนของ

86
วธ Trapezoidal จะขนอยกบ h2 คอ ถาลดคา h ลงครงละสองเทา (n เพมขนครงละสองเทา)
อตราของคาคลาดเคลอนสาหรบแตละ n ทเพมขนครงละสองเทาจงมคาประมาณเปน 4 ในขณะ
ท คาความคลาดเคลอนของวธ Simpson จะขนอยกบคา h4 ถา h ลดลงครงละสองเทาแลวอตรา
ของคาคลาดเคลอนลดลงในอตราสวนคงตวคอ 16
เพอเปนการทบทวนขนตอนการประมาณการอนทรกรลโดยใชวธทงสามขอใหนกศกษา
พจารณาตวอยางละคานวณหาคาอนทรกรลดงน
ตวอยาง
Comparison of Trapeziod Rule and Simpson's 1/3 Rule
Integrate using 10 intervals
The correct answer is 0.7468
x y mult Calc0 1.0000 1 1
0.1 0.9900 4 3.9601990.2 0.9608 2 1.9215790.3 0.9139 4 3.6557250.4 0.8521 2 1.7042880.5 0.7788 4 3.1152030.6 0.6977 2 1.3953530.7 0.6126 4 2.4505060.8 0.5273 2 1.0545850.9 0.4449 4 1.779432
1 0.3679 1 0.367879
Trapeziod 0.746211
Simpson 0.746825
∫ −=1
0
2
dxeI x

87
4.7 การประยกตใชวธ Trapezoidal และ Simpson’s rule ในงานวศวกรรม
ในตอนนจะขอยกตวอยางการประยกตใชวธ Trapezoidal และ Simpson’s rule ในงาน
การคานวณพนทดนตดดนถมของหนาตดถนน ซงพบเหนไดบอยในงานวศวกรรมการทาง
ตวอยาง คณเปนวศวกรโยธาของบรษทอตาเลยนไทย คณไดรบมอบหมายใหรบผดชอบการหา
ปรมาตรดนตดดนถมของถนนเสนหนง ในชวงระหวาง station 0+00 จนถง station 0+25 ชด
ขอมลงานดนททางบรษทจดหามาใหโดยทมสารวจท station 0+00 ยาวไปจนถง station 0+25
แสดงดงตารางและรปขางลาง
จงใชวธ a) Trapezoidal Rule และ b) Simpson’s 1/3 Rule
เพอคานวณหาปรมาตรดนตดดนถมของถนนเสนดงกลาว กาหนด b=10

88
วธทา เพอคานวณหาปรมาตรดนตดดนถมของถนนเสนดงกลาว ในขนแรกเราจะตองทาการ
คานวณหาพนทดนท station 0+00 โดยใชวธ a) Trapezoidal Rule และ b) Simpson’s
1/3 Rule กอน เสรจแลวคณดวยระยะทาง 25 เมตรเพอคานวณปรมาตร
ปรมาตรดนตดดนถมของถนนคานวณโดยวธ Trapezoidal = 1622.9 x 25 = 40572.5 m3

89
ดงนนปรมาตรดนตดดนถมของถนนคานวณโดยวธ Simpson =1456.8 x 25 = 36420 m3
จะเหนไดวาคาทไดจากวธทงสองมคาแตกตางกน โดยทวไปจะใชคาเฉลยของวธทงสองเปน
คาตอบแตหากมการคานวณคาความคลาดเคลอนกจะสามารถทราบไดวาวธใดดทสด

บทท 5
เทคนคการหาคาทเหมาะสมทสด Optimization
5.1 บทนา
หนงในบรรดาคณคศาสตรสาขาประยกตคอ การศกษาเทคนคเพอการหาคาทเหมาะสม
ทสด หรอ Optimization เปนการนาคณตศาสตรมาใชในการแกปญหาทตองการทราบจดหรอ
คาตอบทเหมาะสมหรอไดประโยชนสงสด (Solving optimization problems) ตวอยางเชน ใน
เรองผลตอบแทนเราตองการจะไดสงทสดทจะเปนไปได (Maximize) สวนเรองเวลาทใช ตนทน
หรอวตถดบ เราตองการใหตาทสดเทาทจะเปนไปได (Minimize) ภายใตเงอนไขและขอจากดท
หลกเลยงไมได เทคนคนไดถกนามาประยกตใชเปนครงแรกโดย Cauchy ในเรองการหาคา
ตาสด และไดถกพฒนาเปนลาดบอยางตอเนองเพอนามาประยกตใชในงานวศวกรรม
5.2 การนาเอา Optimization ไปใชประโยชนในงานวศวกรรมโยธา
การนาเอา Optimization ไปใชกบปญหาตางๆ ทเกดขนมากมาย ยกตวอยางเชน ใน
สวนของวศวกรโครงสราง การออกแบบโครงสราง ไดมการนาเทคนคดงกลาวมาประยกตใชรวม
เพอศกษาพฤตกรรมของโครงสรางโดยใชหลกของพลงงานและ เพอหาตนทนการกอสรางทตา
ทสด หรอในงานวศวกรรมขนสงกไดมการนาเอาเทคนคดงกลาวมาประยกตใชเพอการวางแผน

91
และกาหนดตารางการขนสงในรปแบบของแบบจาลองเครอขาย หรอแมกระทงในงานวศวกรรม
แหลงนากสามารถนาเอาเทคนคดงกลาวมาประยกตใชไดกบการคานวณการควบคมการเคลอน
ตวของปรมาณนาและการขนทงของสารเคม
การศกษาเทคนคเพอการหาคาทเหมาะสมทสด หรอ Optimization ประกอบไปดวย
องคประกอบสาคญ 3 สวนคอ
1. Decision variable หมายถงตวแปรทใชตดสนใจ ซงผวเคราะหโดยทวไปเปนผกาหนด ตว
แปรทกคาเปนอสระตอกน ตวแปรทกคาตองคงทแนนอน และรคาจรง
2. Objective function หมายถงความตองการสดทาย ทตองการจะไดสงทสดเทาทจะเปนไปได
Maximize หรอ ทตองการจะไดตาทสดเทาทจะเปนไปได Minimize แลวแตกรณ
3. Constraints หมายถง ขอจากด หรอ เงอนไข ทจาเปนตองทาตามหรอหลกเลยงไมได
ซงทง 3 องคประกอบนนยมใชรวมกบแบบจาลองทใชสาหรบหา Maximize or
Minimize ท สมการความสมพนธระหวาง Objective function และ Constraints เปนเสนตรง
(Linear relationship) ทงนเพราะธรรมชาตของหลายๆปญหา มความสมพนธกนในลกษณะเชง
เสน (Linear) หรออยางนอยกสามารถอนโลมเปนเชงเสนได โดยทมขอผดพลาดเลกนอยเทานน
นอกจากนเมอเสรจสนการวเคราะหแลว ผวเคราะหยงสามารถมแนวทางการตดสนใจแบบ
"What ....if " เพอใหลองทดสอบเปลยนแปลงเงอนไขไดงาย อนจะทาใหผวเคราะหสามารถใช
เปนเครองมอในการวางแผน รบมอ กบปญหา หรออปสรรค ทอาจเกดขนได

92
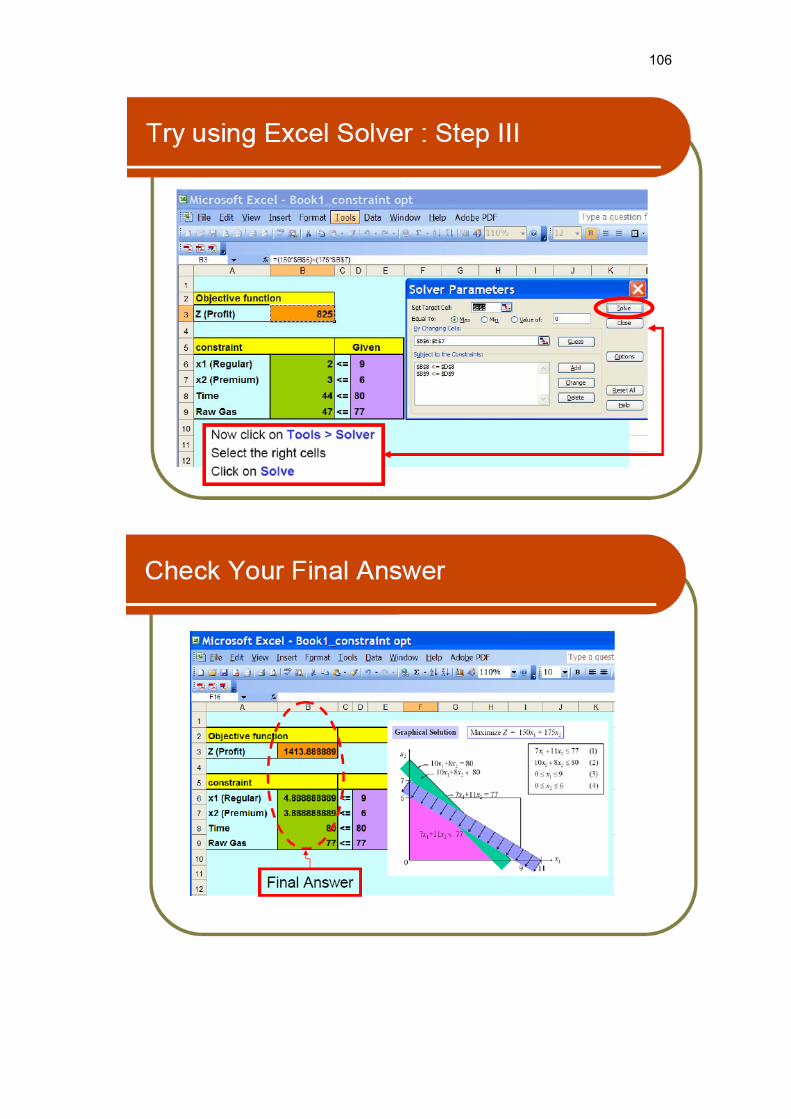
5.3 การแกปญหาวศวกรรมโดยใชเทคนค Optimization รวมกบ Excel
เพอกอใหเกดการเรยนรเทคนคเพอการหาคาทเหมาะสมทสด หรอ Optimization ไดใน
ระยะเวลาอนสน ในท นจะขอยกตวอยางการแกปญหาในงานวศวกรรมโดยใชเทคนค
Optimization รวมกบ Excel ในการแกปญหาโจทย
ตวอยาง คณเปนวศวกรโครงการของบรษทตางชาตแหงหนงทเขามาประกอบกจการในประเทศ
ไทย ในชวงระหวางทดลองงานคณเขามาปฏบตหนาทในวนแรกและถกถามใหออกแบบขนาด
ของถงรปทรงกระบอกซงจะตองสามารถทาการตดตงไวทายรถปคอพของบรษทเพอใชในการ
ขนยายนาเสยออกจากพนททเพงทาการขดลอกออกจากบรเวณโครงการดวยงบประมาณท
จากดและกอใหเกดความปลอดภยในเวลาเดยวกน
ตวอยางวธการคด จากทไดเ รยนมาทภาควชาวศวกรรมโยธา คณะวศวกรรมศาสตร
มหาวทยาลยมหดลคณไดรบทราบกระบวนการคดในเบองตนเกยวกบองคประกอบสาคญ 3
สวนคอดงน
• Decision variable หมายถงตวแปรทใชตดสนใจ ในทนคอราคากอสรางของถงรป
ทรงกระบอกประกอบไปดวยสองสวน คอคาใชจายทเกยวเนองกบวสด (สมพนธ
โดยตรงกบนาหนกของวสด) และ คาใชจายทเกยวเนองกบคาการเชอมวสดทงดานใน
และนอกของตวถง (สมพนธโดยตรงกบความยาวของรอยเชอม)

93
• Objective function หมายถงความตองการสดทาย ทตองการจะไดในทนคอราคา
กอสรางของถงทตองการจะไดตาทสดเทาทจะเปนไปได
• Constraints หมายถงขอจากดหรอเงอนไขทหลกเลยงไมไดในทนคอปรมาณสารเคมท
ทตองขนยายและขนาดของกะบะทายรถปกอพทถงจะตองถกตดตง
ตวอยางวธการทา

94

95

96

97

98
ผลจากการแกปญหาโจทยขางตนโดยใชเทคนค Optimization รวมกบ Excel ในการแกปญหา
โจทยพบวาขนาดของถงทเลกทสดทควรใชอยท D=0.983เมตร และ L=1.053 เมตร โดยราคา
ของคากอสรางอยท $5723.149
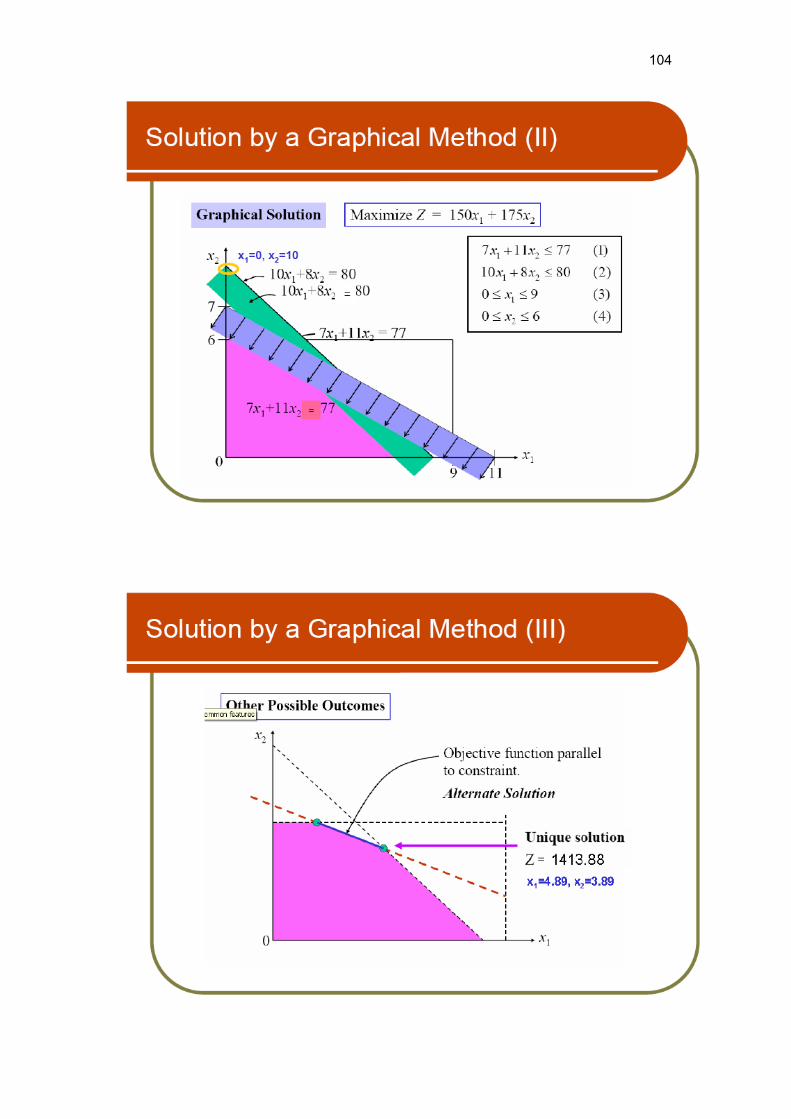
5.3 การแกปญหาวศวกรรมโดยวธกราฟ
โดยมากระบบของปญหาในงานทางวศวกรรม จะมตวแปรซงเปนองคประกอบของ
ระบบจานวนมากซงมซบซอนมาก การหาผลลพธจงมกจะใชคอมพวเตอรชวยในการคานวน ใน
ปจจบนไดมการพฒนาโปรแกรมคอมพวเตอรสาเรจรปเพอใชในการแกปญหาโปรแกรมเชงเสน
ดงในตวอยางแรกทเราสามารถใช Excel ในการแกปญหาโจทย อยางไรกตามเราจาเปนตอง
เรยนรถงลกษณะของปญหางายๆ ใหเขาใจเปนขนตอนเพอความเขาใจในการแกปญหาซบซอน
ตอไป สาหรบปญหาทมเพยง 1 หรอ 2 ตวแปร วธกราฟเปนวธงายๆ ซงสามารถจะหาคาตอบ
ตวอยางถดไปจะขอนาเสนอการแกปญหา

99
ตวอยาง พจารณาโปรแกรมเชงเสนตอไปน
การแกปญหาโปรแกรมเชงเสนโดยวธกราฟมขนตอนตอไปน
1. วาดกราฟของสมการแสดงขอบขายท งหมด (สมการขอจากด และ non-negativity
constraints)
2. ระบพนททเปนสอดคลองกบขอจากดทงหมด นนคอคาตอบของสมการแสดงขอบขายทงหมด
อยบนพนทนพนทนเรยกวา (feasible region)
เราจะเหนไดวาคาของตวแปร และ ทอยในพนททแรงเงามคาทสอดคลองกบขอจากดท
กาหนด
3. วาดกราฟของสมการกาหนดเปาหมายโดยการกาหนดใหสมการกาหนดเปาหมายมคาตางๆ
พรอมทงหาทศทางการเปลยนคาของสมการกาหนดเปาหมาย

100
สมการ เปนเสนตรงโดยทจดตางๆ บนเสนตรงจะใหคา z เดยวกน เมอ
กาหนดคา z คาใหมสมการทไดจะเปนเสนตรงทขนานกบเสนเดม จากกราฟขางตนจด
ทกๆจดทอยบนเสนตรง จะมคาของสมการกาหนดเปาหมายเทากบ 2
ในขณะเดยวกนสาหรบจด ทอยบนเสนตรง จะมคาของสมการกาหนด
เปาหมายเทากบ 5 เราจะเหนไดวาเมอคาของสมการกาหนดเปาหมายเพมขนเรอยๆ เสนตรงจะ
เลอนขนไปทางขวามอ ดงแสดงในกราฟ
4. ในการหาคาตอบของโปรแกรมเชงเสนสามารถทาไดโดยการเปลยนคาของสมการกาหนด
เปาหมาย ถาสมการกาหนดเปาหมายตองการหาคาสงสด คาตอบของโปรแกรมเชงเสนขางตน
คอคาของตวแปร และ x2 ททาใหคาของสมการกาหนดเปาหมายมคาสงสดโดยทคาของ
ตวแปรนนจะตองอยในพนททแรเงาดวย

101
จากกราฟขางตน ในการหาคาสงสดของสมการกาหนดเปาหมายทาไดโดยเลอนเสนตรงไป
ทางขวาจนสดเขตพนททแรงเงา จะเหนไดวา คาของ และ ททาใหคาของสมการกาหนด
เปาหมายมคาสงสดคอ โดยทคาของสมการกาหนดเปาหมายมคา
เทากบ 22/3 ถาเราตองการหาคาตาสดของสมการกาหนดเปาหมายทาไดโดยเลอนเสนตรงไป
ทางซายจนสดพนทแรงเงา คาของ และ ททาใหคาของสมการกาหนดเปาหมายมคาตาสด
คอ
เนองจากสมการแสดงขอบขายของแตละสมการเปนเสนตรงจะทาใหพนทของจดทสอดคลองกบ
ขอจากดทงหมด เปน polygon จากตวอยางขางตนพบวาคาของ และ ททาใหสมการ
กาหนดเปาหมายมคาทดทสดจะอยทจดยอดจดใดจดหนงของสมการแสดงขอบขายเหลานน
จากขอสงเกตนเราสามารถแกโปรแกรมเชงเสนไดโดยหาจดยอดทกๆ จดบนพนททแรงเงาหา
คาของสมการกาหนดเปาหมายของจดเหลานน และเปรยบเทยบหาคาตอบ จากตวอยางขางตน
จะไดวา

102
จะเหนไดวาในกรณนคาของสมการกาหนดเปาหมายมคาสงสดเทากบ 8 เมอ และ
หรอ และ จากกราฟเราจะเหนไดวาคาตอบทงหมดคอจดทกๆจด
ของ และ ทอยบนเสนตรง โดยท มคาอยระหวาง 2/3 และ 2
แบบฝกหด จงแกการแกปญหาโดยวธกราฟและเปรยบเทยบกบคาตอบทไดจาก Excel Solver

103
คาตอบ
104

105
106

บทท 6
อนกรมฟเรยร
6.1 บทนา
บอยครงทวศวกรตองเรยนรสภาพทางธรรมชาต เชน การไหลของความรอน ความถ
ธรรมชาตของการสนทางวศวกรรม การสนไหวของโครงสรางและเปลอกโลก การเคลอนทของ
แสงและเสยง ซงเหลานมพฤตกรรมการเคลอนทสามารถทจะเปนการเคลอนทในรปแบบใดกได
ไมมขอจากดทแนนอน แตในการสน วตถทเกดการสนมกจะมการเคลอนทกลบไปกลบมา ใน
รปแบบตางๆ สาหรบการเคลอนทกลบไปมาซาตวเองทงายตอการพจารณาและนามาสราง
แบบจาลองมากทสด คอการเคลอนทแบบฮารโมนกส (Harmonics Motion) ซงการเคลอนท
แบบนจะพบมากในชนสวนทางกลตางๆ และการเคลอนททมลกษณะเปนวงกลมรอบจดคงทจด
หนงหรอเปนคาบ ๆ และสามารถเขยนในลกษณะเปนฟงกชน g(x) แทนคาบเหลานน
(1) ( ) ( )xgpxg =+ สาหรบทก ๆ x
เมอคา P เรยกวา คาบ ของฟงกชน
พจารณาฟงกชนคาบ 2π ถา g(x) มคาบ P ดงนน ( ) ( / 2 )f x g Px π= จะเปนคาบ
2π และสามารถตรวจสอบไดโดยสงเกตจาก
(2) ( )( 2 )2 2Px Pxf x g P g f xππ π
⎛ ⎞ ⎛ ⎞+ = + = =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠

108
ในสวนตอไปน เราจะสมมตวา ( )f x คอฟงกชนทมคาบ2π ดงน
(3) ( )( 2 )f x f xπ+ = สาหรบทก ๆ x หนวยการเรยนนจะกลาวถงนยามและสวนประกอบตางๆ ทเปนพนฐานของการเคลอนทแบบ
ฮารโมนกส รวมถงการศกษาถงวธทางคณตศาสตรทใชในการวเคราะหฮารโมนกส หรอ
การศกษาอนกรมฟเรยร
6.2 นยามเกยวกบการเคลอนทแบบฮารโมนกส
6.2.1 รอบ (Cycle) การเคลอนทของวตถจากสภาพสมดลหรอจากจดสมดลเรมตนหนง
ไปในทศทางหนงจนกระทงถงจดสงสดหรอไกลทสดในทศทางการเคลอนทนน แลว
ยอนกลบมาผานจดสมดลและเคลอนทตอไปในทศทตรงกนขามกบทศทางแรกจนกระทง
ถงจดสงสดหรอไกลทสดในทศทางนน แลวกลบมาทจดสมดลอกครงหนง การเคลอนท
ครบวงรอบดงทกลาวมาน เราจะเรยกวาวตถนนเคลอนทครบหนงรอบ (Cycle) ของการ
สนหรอรอบของการเคลอนท
6.2.2 ชวงกวาง (Amplitude) ระยะการขจดทวดจากจดสมดลถงจดสงสดหรอไกลจาก
จดสมดลทสดในการเคลอนท เราเรยกระยะนนวา ชวงกวาง (Amplitude) ของการสน
6.2.3 คาบการสน (Period) คอชวงเวลาทใชในการเคลอนครบหนงรอบการเคลอนท
ซงสญลกษณทจะใชในทนคอ

109
6.2.4 ความถ (Frequency) ความถของการสนคอจานวนรอบการสนทวตถเคลอนทใน
หนงหนวยเวลา ดงนนความถ จะมความสมพนธกบคาบการสนคอ
และหนวยของความถจะเปนสวนกลบของเวลา แตทเรานยมใชคอสวนกลบของวนาท
หรอ Hertz, Hz สาหรบความถเชงมมหรอความเรวเชงมม (Angular Frequency หรอ
Angular Velocity) จะเปนมมทวตถเคลอนทรอบจดศนยกลางในหนงหนวยเวลา ซง
ความถเชงมมนจะมความสมพนธกบความถคอ
และความถเชงมมนจะมหนวยเปน
อยางไรกตามแมวานยามของความถและความถเชงมมจะตางกน แตความแตกตางนจะ
ไมคอยไดรบความสนใจในการสนทางวศวกรรมมากนกอาจเปนเพราะวาเราม
ความสมพนธระหวางทงสองคาอยแลวกได โดยในการพจารณาเรองการสนทางวศวกรรม
น เมอเรากลาวถงความถเราอาจหมายถงไดทงความถ f และความถเชงมม ซงการท
จะบอกใหแนชดวาเปนคาใดนนเราจะใชสงเกตจากหนวยของปรมาณนน นอกจากนนแลว
ในการศกษาวชานเมอเรากลาวถงความถ เรามกจะหมายถงความถเชงมม มากกวาคา f
ซงผอานจะไดสงเกตพบในหนวยตอๆ ไป

110
6.2.5 มมเฟส (Phase Angle) หากเราพจารณาการเคลอนทของวตถทเปนอสระตอกน 2
วตถ โดยทงสองมสมการการเคลอนทดงน
และ
ซงกราฟแสดงการเคลอนทของวตถทงสองนแสดงในรปท 6.1 จากสมการการ
เคลอนททกาหนดใหน เราสามารถกลาวไดวาการเคลอนทของวตถทงสองนสอดคลองกน
(Synchronous) เพราะทงคเกดการเคลอนทดวยความถ ทเทากน ซงการเคลอนทท
สอดคลองกนนไมจาเปนตองมชวงกวางเทากน อกทงยงไมมความจาเปนทวตถทงสองจะ
ถงจดการเคลอนทสงสดพรอมกน และมมเฟสคอมมทวตถสองชน เคลอนทถงจดสงสด
แตกตาง โดยวตถทงสองชนตองเคลอนทสอดคลองกน จากรปท 6.1 เราจะพบวากราฟ
จะถงจดสงสดกอนทกราฟ จะถงจดสงสด ซงเรา
สามารถกลาวไดอกอยางหนงวาการเคลอนททงสองมเฟสแตกตางกนเทากบ โดย
การเคลอนทของ จะนา (lead) คอขนถงจดสงสดกอน วตถ ใน
การเคลอนทในรอบเดยวกนอยเทากบ

111
φ
t
x
รปท 6.1 การเคลอนททมมเฟสทแตกตางกน
การเคลอนทแบบฮารโมนกสอยางงายน ถาเราพจารณาอกลกษณะหนงเรากอาจจะมอง
ไดเหมอนกบการเคลอนทของคลนไดเชนกน เชนการเคลอนท และ
หากเรานาการเคลอนททงสองมารวมกน เรากจะไดการเคลอนททเปน
ลกษณะฮารโมนกสอกแบบหนง นนคอถา เราจะไดการเคลอนทเปน
ซงกราฟแสดง และ ไดแสดงไวในรปท 6.2 ซงการรวมการเคลอนทนจะเหน
วาจะคลายกบการรวมคลน การรวมการเคลอนทในลกษณะนจะเกดขนในกรณทระบบมลาดบ
ขนความเปนอสระทมากกวาหนง แลวมวลในระบบเกดการสนขน ซงโดยปกตแลวระบบทม
ลาดบขนความเปนอสระ n จะมความถธรรมชาตเทากบ n คา การทระบบทงระบบสนดวย
ความถธรรมชาตความถใดความถหนงเราเรยกวาระบบเกดการสนใน โหมดปกต (Normal

112
Mode) อยางไรกตามระบบสามารถทจะสนในความถธรรมชาตหลายๆความถไดพรอมกน ซง
ลกษณะกจะเปนการสนทรวมความถธรรมชาตหลายความถเขาดวยกน
รายละเอยดของการสนในโหมดปกตนน เราจะกลาวถงในหวขอของระบบทมลาดบขน
ความเปนอสระเทากบสอง และมากกวาสอง ซงเราจะศกษาในลาดบสงตอๆ ไป
x3 = x1 + x2
x2 = A2 sin ω2t
x1 = A1 sin ω1t
รปท 6.2 การรวมการสน
จากรปท 6.2 การเคลอนททไดจากการรวมการเคลอนทสองสวนเขาดวยกน เราจะ
พบวาทงชวงกวางการสนและความถไมจาเปนทจะตองเทากบการเคลอนทคาใดคาหนง ในการ
รวมการเคลอนทหรอคลนเขาดวยกน จะเกดปรากฏการณทนาสนใจปรากฏการณหนงคอ ถา
การเคลอนททงสองมความถใกลเคยงกนมาก ตวอยางเชนเราให

113
และ
เมอ คอปรมาณทมคานอย เมอเรารวมการเคลอนททงสองเขาดวยกน เราจะได
ซงจากเอกลกษณะตรโกณมต ดงนนเราจะได
ซงหากเรานาคาทไดจากสมการดงกลาวไปเขยนกราฟจะไดกราฟในรปท 6.3 ซงเรา
สามารถประมาณไดวาผลรวมทไดมลกษณะเปนกราฟไซน มความถ และมชวงกวางการสน
เพมขนและลดลงระหวาง 0 ถง 2A ดวยความถ ปรากฏการณนเราเรยกวา การบท (Beat)
และความถทเกดการลดลงและเพมขนของชวงกวางนเราเรยก ความถการบท (Beat
Frequency)
ปรากฏการณการบทน เรามกจะพบเหนในการสนของเครองจกรในกรณทการสนเกด
จากชนสวนทเคลอนทมากกวาสองชนและมความถทใกลเคยงกน หรอเรายงอาจพบไดในกรณท
ความถของแรงกระทาเขาใกลความถธรรมชาตของการสนของระบบ ซงการสนจะเพมและลด
ขนาดลงเปนหวงๆ ซงปรากฏการณเหลานลวนแตเปนอนตรายตอโครงสรางหรอเครองจกร
ทงสน เพราะจะทาใหชนสวนตางๆรบภาระกรรมแบบแรงกระทาซาอยตลอดเวลาและอาจเกด
การเสยหาย เนองจากความลาได นนคอแมวาความเคนทเกดขนยงไมเทากบความเคนสงสดท
วสดรบได แตวสดหรอโครงสรางกอาจเสยหายเนองจากแรงกระทาซานได

114
x = cos(δωt/2)
รปท 6.3 ปรากฎการบท
6.3 การวเคราะหฮารโมนกสในรปอนกรมฟเรยร
แมวาการเคลอนทแบบฮารโมนกส เปนการเคลอนทแบบงายทสดในการพจารณาการ
สนของระบบ แตในทางปฎบตแลวระบบทเกดการสนทงหมดไมจาเปนทจะตองมการเคลอนท
แบบฮารโมนกส อยางไรกตามเนองจากการสนโดยทวไปนนการเคลอนทจะเกดขนในลกษณะ
เปนการเคลอนทแบบซาตวเองหรอเคลอนทเปนคาบเสยเปนสวนใหญ ซงจากหลกคณตศาสตร
แลวเรามทฤษฎหนงททาใหเราพจารณาฟงกชนใดๆกตามทเปนฟงกชนแบบเปนคาบ จะ
สามารถเขยนใหอยในรปของอนกรมของฟงกชนฮารโมนกสได ซงการพจารณาฟงกชนทเปน
คาบใหเปนอนกรมดงกลาวเรามกเรยกวา การวเคราะหฮารโมนกส (Harmonic Analysis) และ
อนกรมทเราใชแทนคาฟงกชนเปนทรจกกนดในชอของ อนกรมฟเรยร (Fourier series) ซงจะ
เปนอนกรมของฟงกชนไซนและโคไซน

115
ถาฟงกชน เปนฟงกชนซาตวเองใดๆ ซงมคาบเทากบ เราสามารถทจะเขยน
ฟงกชนนใหอยในรปของอนกรมอนนตฟเรยรไดในรป
หรอ
เมอ ซงเปนคาความถพนฐาน (Fundamental Frequency) สาหรบพจนทมความถ
พนฐานเรามกจะเรยก ฮารโมนกสพนฐาน สวนพจนทมความถ เรานยมทจะเรยก
ฮารโมนกสลาดบทสอง, ลาดบทสาม ตามลาดบตอๆไป สวนคา และ
จะเปนคาคงท ซงเรานยมเรยก สมประสทธฮารโมนกส (Harmonic Coefficient หรอ Fourier
Coefficient)
ในการหาคาสมประสทธฮารโมนกสเหลานเราสามารถกระทาไดโดยคณสมการดวย
หรอ ตามลาดบ จากนนหาปรพนธในชวงหนงคาบของฟงกชน นนคอหา
ปรพนธจาก ถง ซงทาใหเทอมอนๆจะมคาเทากบศนย และเราจะไดวา

116
สาหรบวธการพสจนเราสามารถหาไดจากหนงสอทางดานคณตศาสตรทวไป
การเคลอนทของระบบใดๆทมลกษณะเปนคาบดวยฟงกชน เมอกระจายฟงกชน
นออกไปเปนอนกรมฟเรยรแลวเราจะสามารถบอกไดวาฟงกชนนนประกอบดวยฟงกชนฮารโม
นกสใดบาง และแมวาอนกรมฟเรยรนจะเปนอนกรมอนนต แตเรากสามารถทจะประมาณคา
ฟงกชนนดวยผลรวมของเทอมตนๆได เพราะโดยทวไปแลวเทอมทมความถสงมากขนมกจะม
ขนาดลดลง

117
แบบฝกหด ในแบบฝกหดท 1 ถง 5 ใหหาคาของอนกรมฟเรยรจากฟงกชนทใหมาคาใบ ใหทาตาม
กระบวนการทแสดงในตวอยางท 5.13 และ 5.14 กราฟแตละฟงกชน และบางสวนของ ( ) ( ) ( )xandSxSxS 432 ,, ของคาอนกรมฟเรยรทสอดคลองกนเหมอนในรปท 5.19
1. ( ) =xf⎩⎨⎧
<<<<−−π
πxfor
xfor01
01
วธทา ja ( ) ( )dxjxxf cos1∫−=π
ππ ท j = 1 , 2 , 3 , …
( ) ( ) ⎟⎠⎞⎜
⎝⎛ +−= ∫∫− dxjxdxjx cos1cos11
0
0 π
ππ
( ) ( )⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+−=
−
π
ππ 0
0
sin1sin11 jxj
jxj
( ) ( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛−++−= 0sin1sin1sin10sin11
jj
jj
jjππ
π
= 0
jb ( ) ( )dxjxxf sin1∫−=π
ππ ท j = 1 , 2 , 3 , …
( ) ( ) ⎟⎠⎞⎜
⎝⎛ +−= ∫∫− dxjxdxjx sin1sin11
0
0 π
ππ
( ) ( )⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−=
−
π
ππ 0
0
cos1cos11 jxj
jxj
( ) ( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛+−−= 0cos1cos1cos10cos11
jj
jj
jjππ
π
( )⎟⎟⎠
⎞⎜⎜⎝
⎛−= π
πj
jjcos221
( )( )ππ
jj
cos12−=
( )( )j
j112
−−=π

118
0a ( )dxxf∫−=π
ππ1
⎟⎠⎞⎜
⎝⎛ +−= ∫∫− dxdx
π
ππ 0
0111
( )π
ππ 0
01 xx +−=−
( )001−+−−= ππ
π
= 0
( ) ( )( )∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛−−=
1sin112
j
j jxj
xfπ
2. ( )⎪⎪⎩
⎪⎪⎨
⎧
<≤−
<≤−+=
ππ
ππ
xforx
xforxxf
02
02
วธทา ja ( ) ( )dxjxxf cos1∫−=π
ππ ท j = 1 , 2 , 3 , …
( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ −+⎟
⎠⎞
⎜⎝⎛ += ∫∫− dxjxxdxjxx cos
2cos
21
0
0 π
π
πππ
( ) ( ) ( ) ( )
( ) ( ) ⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−+
⎟⎠⎞
⎜⎝⎛++⎟
⎠⎞
⎜⎝⎛
=
∫
∫∫∫ −−
dxjxx
dxjxdxjxxdxjx
cos
cos2
coscos21
0
0
00
π
π
ππ
ππ
π
( ) ( ) ( ) ( )
( ) ( ) ⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
−+
++−
= −−−
ππ
π
πππ
ππ
π
002
0
00
2
0
sincos1
sin2
sincos1sin21
jxjxjx
j
jxj
jxjxjx
jjx
j
( ) ( ) ( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛−++−= 0cos1cos1cos10cos11
2222 jj
jj
jjππ
π
( ) ( )( )1coscos112 −++−= πππ
jjj
( )( )1cos22 −= ππ
jj
( )( )1122 −−= j
j π

119
jb ( ) ( )dxjxxf sin1∫−=π
ππ ท j = 1 , 2 , 3 , …
( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ −+⎟
⎠⎞
⎜⎝⎛ += ∫∫− dxjxxdxjxx sin
2sin
21
0
0 π
π
πππ
( ) ( ) ( ) ( )
( ) ( ) ⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−+
⎟⎠⎞
⎜⎝⎛++⎟
⎠⎞
⎜⎝⎛
=
∫
∫∫∫ −−
dxjxx
dxjxdxjxxdxjx
sin
sin2
sinsin21
0
0
00
π
π
ππ
ππ
π
( ) ( ) ( ) ( )
( ) ( ) ⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
+−
−−+−
= −−−
ππ
π
πππ
ππ
π
002
0
00
2
0
cossin1
sin2
cossin1cos21
jxjxjx
j
jxj
jxjxjx
jjx
j
( ) ( ) ( ) ( )
( ) ( ) ⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+++
−−−+−=
0cos0cos2
cos2
cos0cos2
0cos21
πππ
πππππππ
π jjj
jj
jj
jjj
= 0
0a ( )dxxf∫−=π
ππ1
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ −+⎟
⎠⎞
⎜⎝⎛ += ∫∫− dxxdxx
π
π
πππ 0
0
221
( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−+⎟
⎠⎞
⎜⎝⎛++⎟
⎠⎞
⎜⎝⎛= ∫∫∫∫ −−
dxxdxdxxdxππ
ππ
πππ 00
00
221
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−++=
−−
ππ
ππ
πππ 0
2
0
020
22221 xxxx
⎟⎟⎠
⎞⎜⎜⎝
⎛+−−+−++= 0
20
220
201 2222 ππππ
π
= 0
( ) ( )( )∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛−−=
12 cos112
j
j jxj
xfπ

120
3. ( ) =xf⎩⎨⎧
<<<<−π
πxforx
xfor0
00
วธทา ja ( ) ( )dxjxxf cos1∫−=π
ππ ท j = 1 , 2 , 3 , …
( ) ( ) ⎟⎠⎞⎜
⎝⎛ += ∫∫− dxjxxdxjx coscos01
0
0 π
ππ
( ) ( )⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+=
ππ
π 002 sincos11 jx
jxjx
j
( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛−= 0cos1cos11
22 jj
jπ
π
( )( )1cos12 −= ππ
jj
( )( )1112 −−= j
j π
jb ( ) ( )dxjxxf sin1∫−=π
ππ ท j = 1 , 2 , 3 , …
( ) ( ) ⎟⎠⎞⎜
⎝⎛ += ∫∫− dxjxxdxjx sinsin01
0
0 π
ππ
( ) ( )⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−=
ππ
π 002 cossin11 jx
jxjx
j
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛+−= 0cos1 ππ
πj
j
( )( )πjj
cos1−=
( ) j
j11
−−=
0a ( )dxxf∫−=π
ππ1
⎟⎠⎞⎜
⎝⎛ += ∫∫− dxxdx
π
ππ 0
001
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛=
π
π 0
2
21 x
⎟⎟⎠
⎞⎜⎜⎝
⎛=
21 2ππ
2π
=

121
( ) ( )( ) ( )∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−−+=
12 sin11cos111
4 j
jj jxj
jxj
xfπ
π
4. ( ) =xf
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−<<−−
<<−
<<−
21
221
21
ππ
ππ
ππ
xfor
xfor
xfor
วธทา ja ( ) ( )dxjxxf cos1∫−=π
ππ ท j = 1 , 2 , 3 , …
( ) ( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−++−= ∫∫∫ −
−
−dxjxdxjxdxjx coscoscos1
2
2
2
2ππ
π
π
π
ππ
( ) ( ) ( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−+−=
−
−
−
π
π
π
π
π
ππ2
2
2
2sin1sin1sin11 jx
jjx
jjx
j
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+−⎟
⎠⎞
⎜⎝⎛=
2sin10
2sin1
2sin10
2sin11 ππππ
πj
jj
jj
jj
j
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛=
2sin4 π
πj
j
jb ( ) ( )dxjxxf sin1∫−=π
ππ ท j = 1 , 2 , 3 , …
( ) ( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−++−= ∫∫∫ −
−
−dxjxdxjxdxjx sinsinsin1
2
2
2
2ππ
π
π
π
ππ
( ) ( ) ( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+−=
−
−
−
π
π
π
π
π
ππ2
2
2
2cos1cos1cos11 jx
jjx
jjx
j
( ) ( )
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⎟⎠⎞
⎜⎝⎛−
+⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−−⎟
⎠⎞
⎜⎝⎛
=
2cos1
cos12
cos12
cos1cos12
cos11
π
πππππ
π jj
jj
jj
jj
jj
jj
= 0
0a ( )dxxf∫−=π
ππ1

122
⎟⎟⎠
⎞⎜⎜⎝
⎛−++−= ∫∫∫ −
−
−dxdxdx 1111
2
2
2
2ππ
π
π
π
ππ
⎟⎟⎠
⎞⎜⎜⎝
⎛−+−= −
−
−
ππ
π
π
π
ππ 2
2
2
21 xxx
⎟⎠⎞
⎜⎝⎛ +−++−=
22221 πππππππ
= 0
( ) ∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛=
1cos
2sin4
jjxj
jxf π
π
5. ( ) =xf
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
<≤−
<≤−
−<≤−−−
πππ
ππ
πππ
xforx
xforx
xforx
2
22
2
วธทา ja ( ) ( )dxjxxf cos1∫−=π
ππ ท j = 1 , 2 , 3 , …
( ) ( ) ( )
( ) ( ) ⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
−++
+−+−=
∫∫
∫∫∫ −
−
−
−
−
dxjxxdxjx
dxjxxdxjxxdxjx
coscos
coscoscos1
22
2
2
22
ππ
ππ
π
π
π
π
π
π
π
π
π
( ) ( ) ( )
( ) ( ) ( )
( ) ( )⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
−+
++−
−+−
=−−
−
−
−
−
−
−
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
22
2
2
2
2
2
2
2
22
2
2
sincos1
sinsincos1
sincos1sin
1
jxjxjx
j
jxj
jxjxjx
j
jxjxjx
jjx
j

123
( )
( ) ⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
⎟⎠⎞
⎜⎝⎛+−⎟
⎠⎞
⎜⎝⎛−+
⎟⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−−⎟
⎠⎞
⎜⎝⎛−
−⎟⎠⎞
⎜⎝⎛+−⎟
⎠⎞
⎜⎝⎛
=
2sin
20
2cos1cos1
2sin0
2sin
22sin
2
2cos1
2cos10
2sin
2
cos12
cos102
sin
1
22
22
22
ππππ
ππππππ
ππππ
ππππ
π
jj
jj
jj
jj
jj
jj
jj
jj
jj
jj
jj
jj
= 0
jb ( ) ( )dxjxxf sin1∫−=π
ππ ท j = 1 , 2 , 3 , …
( ) ( ) ( )
( ) ( ) ⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
−++
+−+−=
∫∫
∫∫∫ −
−
−
−
−
dxjxxdxjx
dxjxxdxjxxdxjx
sinsin
sinsinsin1
22
2
2
22
ππ
ππ
π
π
π
π
π
π
π
π
π
( ) ( ) ( )
( ) ( ) ( )
( ) ( )⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
+−
−−+
+−
=−−
−
−
−
−
−
−
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
π
22
2
2
2
2
2
2
2
22
2
2
sinsin1
coscossin1
cossin1cos
1
jxjxjx
j
jxj
jxjxjx
j
jxjxjx
jjx
j
( )
( )
( )
( ) ⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
⎟⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛+−
⎟⎠⎞
⎜⎝⎛+−⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛++⎟
⎠⎞
⎜⎝⎛−
−⎟⎠⎞
⎜⎝⎛+−⎟
⎠⎞
⎜⎝⎛
=
2cos
2cos
2sin10
2coscos
2cos
22cos
2
2sin1
2sin1cos
2cos
2
02
sin1cos2
cos
1
2
22
2
πππππ
ππππππππ
ππππππ
πππππ
π
jj
jj
jj
jj
jj
jj
jj
jj
jj
jj
jj
jj
jj
jj
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛=
2sin41
2
ππ
jj
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛=
2sin4
2
ππ
jj

124
0a ( )dxxf∫−=π
ππ1
⎟⎟⎠
⎞⎜⎜⎝
⎛−+++−+−= ∫∫∫∫∫ −
−
−
−
−dxxdxxdxxdxdx
ππ
ππ
π
π
π
π
π
πππ
π 22
2
2
221
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−++−−=
−
−
−
−
−
π
π
ππ
π
π
π
π
π
πππ
π2
2
2
2
2
2222
2221 xxxxx
⎟⎟⎠
⎞⎜⎜⎝
⎛+−−+−++−−=
82288821 222
222
22
22 ππππππππππ
π
⎟⎟⎠
⎞⎜⎜⎝
⎛−=
21 2
2 πππ
22
1 2 πππ
=⎟⎟⎠
⎞⎜⎜⎝
⎛=
( ) ∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+=
12 sin
2sin4
4 jjxj
jxf π
ππ
6.ในแบบฝกหดท 1 แทนคา 2π
=x และแสดงวา
K+−+−=71
51
311
4π
วธทา จากขอ1. ( ) ( )( )∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛−−=
1sin112
j
j jxj
xfπ
( )xf ⎟⎠⎞
⎜⎝⎛ ++++= Kxxxx 7sin
725sin
523sin
32sin22
π
⎟⎠⎞
⎜⎝⎛ ++++= Kxxxx 7sin
715sin
513sin
31sin4
π
แทนคา 2π
=x จะได
⎟⎠⎞
⎜⎝⎛
2xf ⎟
⎠⎞
⎜⎝⎛ ++++= K
71
51
3114
π ; 1
2=⎟
⎠⎞
⎜⎝⎛ xf
จงได
K+−+−=71
51
311
4π

125
7.ในแบบฝกหดท 2 แทนคา 0=x และแสดงวา
K++++= 222
2
71
51
311
8π
วธทา จากขอ2. ( ) ( )( )∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛−−=
12 cos112
j
j jxj
xfπ
( )xf ⎟⎠⎞
⎜⎝⎛ −−−−−= Kxxxx 7cos
725cos
523cos
32cos22
222π
⎟⎠⎞
⎜⎝⎛ ++++
−= Kxxxx 7cos
715cos
513cos
31cos14
222π
แทนคา 0=x จะได
( )0f ⎟⎠⎞
⎜⎝⎛ ++++
−= K222 7
151
3114
π ; ( )
20 π
−=f
จงได
K++++= 222
2
71
51
311
8π
8.หาคาอนกรมฟเรยร cosin ของฟงกชนคาบทสอดคลองกบนยามบนคาบนคอ
( ) ππ <≤−= xwherexxf4
2
วธทา ja ( ) ( )dxjxxf cos20∫=π
π ท j = 1 , 2 , 3 , …
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛= ∫ dxjxx cos
42
0
2π
π
( ) ⎟⎠⎞⎜
⎝⎛= ∫ dxjxx cos
21
0
2π
π
( ) ( )⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎠⎞⎜
⎝⎛−= ∫ dxjxx
jjx
jx sin2sin
21
00
2 ππ
π
( ) ( ) ( ) ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−−=
πππ
π 002
0
2
cossin12sin21 jx
jxjx
jjjx
jx
( )⎟⎟
⎠
⎞
⎜⎜
⎝
⎛=
π
π 02 cos2
21 jx
jx
( ) j
j11
2 −=
0a ( )dxxf∫=π
π 0
2

126
⎟⎟⎠
⎞⎜⎜⎝
⎛= ∫ dxxπ
π 0
2
42
⎟⎠⎞⎜
⎝⎛= ∫ dxx
π
π 0
2
21
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛=
π
π 0
3
321 x
( )3
61 ππ
=
( )2
61 π=
( ) ( )∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛−+=
12
2
cos1112 j
j jxj
xf π
9.สมมตให ( )xf เปนฟงกชนคาบกบคาบ P2 ; ( ) ( )xfPxf =+ 2 สาหรบทกคา x. แลวแสดง รปแบบของ Euler ใน (5) และ (6) จาก f เหลาน
0a ( )dxxfP
P
P∫−=1
ja ( ) dxP
xjxfP
P
P⎟⎠⎞
⎜⎝⎛= ∫−πcos1 ท j = 1 , 2 , 3 , …
jb ( ) dxP
xjxfP
P
P⎟⎠⎞
⎜⎝⎛= ∫−πsin1 ท j = 1 , 2 , 3 , …
กาหนดให คาบ = π2 จงทาให ( ) ( ) ππ ==+ Pxfxf ;2
แลวแทนคาจะได 0a ( )dxxf∫−=π
ππ1
ja ( ) dxxjxf ⎟⎠⎞
⎜⎝⎛= ∫− ππ
ππ
πcos1
jb ( ) dxxjxf ⎟⎠⎞
⎜⎝⎛= ∫− ππ
ππ
πsin1

127
ในแบบฝกหด 10 ถง 12 ใชผลของแบบฝกหดท 9 ในการหาคาของอนกรมฟเรยรจากฟงกชนทใหมา กราฟ ( ) ( ) ( )xSandxSxf 64 ,, ในรปแบบทสอดคลองกน
10. ( ) =xf⎩⎨⎧
<≤<≤−201
020xfor
xfor ( ) ( ) 2;4 ==+ Pxfxf
วธทา 0a ( )dxxfP
P
P∫−=1
⎟⎠⎞⎜
⎝⎛ += ∫∫−
2
0
0
20
21 dxdx
( )2
021 x=
= 1
ja ( ) dxP
xjxfP
P
P⎟⎠⎞
⎜⎝⎛= ∫−πcos1 ท j = 1 , 2 , 3 , …
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛= ∫∫− dxxjdxxj 2
0
0
2 2cos
2cos0
21 ππ
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎠⎞
⎜⎝⎛=
2
02sin2
21 xj
jπ
π
( )( )ππ
jj
sin1=
jb ( ) dxP
xjxfP
P
P⎟⎠⎞
⎜⎝⎛= ∫−πsin1 ท j = 1 , 2 , 3 , …
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛= ∫∫− dxxjdxxj 2
0
0
2 2sin
2sin0
21 ππ
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎠⎞
⎜⎝⎛−=
2
02cos2
21 xj
jπ
π
( ) ( )( )0coscos1−−= π
πj
j
( )( )111−−−= j
jπ
( ) ( )( ) ( )( )∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−−−⎟⎟
⎠
⎞⎜⎜⎝
⎛+=
1 2sin111
2cossin1
21
j
j xjj
xjjj
xf ππ
πππ

128
11. ( ) =xf⎪⎩
⎪⎨
⎧
<≤<≤−−<≤−−
31111
131
xforxforxxfor
( ) ( ) 3;6 ==+ Pxfxf
วธทา 0a ( )dxxfP
P
P∫−=1
⎟⎠⎞⎜
⎝⎛ ++−= ∫∫∫ −
−
−dxxdxdx
3
1
1
1
1
311
31
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛++−=
−
−
−
3
1
1
1
21
3 231 xxx
⎟⎠⎞
⎜⎝⎛ −+−+−= 13
21
2131
31
= 0
ja ( ) dxP
xjxfP
P
P⎟⎠⎞
⎜⎝⎛= ∫−πcos1 ท j = 1 , 2 , 3 , …
⎟⎠⎞
⎜⎝⎛ ++−= ∫∫∫ −
−
−
3
1
1
1
1
3 3cos
3cos
3cos
31 dxxjdxxjxdxxj πππ
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
⎟⎠⎞
⎜⎝⎛−
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−
= −−
−
−
3
1
1
1
1
122
1
3
3sin3
3sin3
3cos9
3sin3
31
xjj
xjjxxj
jxj
j
ππ
ππ
ππ
ππ
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⎟⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+
⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+−⎟
⎠⎞
⎜⎝⎛
=
3sin30
3sin3
3sin3
3cos9
3cos90
3sin3
31 2222
ππ
ππ
ππ
ππ
ππ
ππ
jj
jj
jj
jj
jj
jj
= 0
jb ( ) dxP
xjxfP
P
P⎟⎠⎞
⎜⎝⎛= ∫−πsin1 ท j = 1 , 2 , 3 , …
⎟⎠⎞
⎜⎝⎛ ++−= ∫∫∫ −
−
−
3
1
1
1
1
3 3sin
3sin
3sin
31 dxxjdxxjxdxxj πππ
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
⎟⎠⎞
⎜⎝⎛−
⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
= −−
−
−
3
1
1
1
1
122
1
3
3cos3
3cos3
3sin9
3cos3
31
xjj
xjjxxj
jxj
j
ππ
ππ
ππ
ππ

129
( )
( ) ⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
⎟⎠⎞
⎜⎝⎛+−⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+−⎟
⎠⎞
⎜⎝⎛
=
3cos3cos3
3cos3
3cos3
3sin9
3sin9cos3
3cos3
31 2222
ππ
ππ
ππ
ππ
ππ
ππ
ππ
ππ
jj
jj
jj
jj
jj
jj
jj
jj
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+−=
3sin18cos6
31
22
ππ
ππ
jj
jj
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+−−=
3sin612
22
πππ
jjj
j
( ) ( )∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+−−=
122 3
sin3
sin612j
j xnjjj
xf ππππ
12. ( ) 3392 <≤−+−= xforxxf ( ) ( ) 3;6 ==+ Pxfxf
วธทา 0a ( )dxxfP
P
P∫−=1
( )dxx∫− +−=3
3
2 931
⎟⎠⎞⎜
⎝⎛ +−= ∫∫ −−
dxdxx3
3
23
39
31
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+−=
−−
3
3
3
3
3
933
1 xx
( )27279931
++−−=
= 12
ja ( ) dxP
xjxfP
P
P⎟⎠⎞
⎜⎝⎛= ∫−πcos1 ท j = 1 , 2 , 3 , …
( ) dxxjx ⎟⎠⎞
⎜⎝⎛+−= ∫− 3
cos931 3
3
2 π
⎟⎠⎞
⎜⎝⎛ +−= ∫∫ −−
3
3
3
3
2
3cos9
3cos
31 dxxjdxxjx ππ
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−=
−−
−∫
3
3
3
3
3
3
2
3sin27
3sin6
3sin3
31 xj
jdxxjx
jxj
jx π
ππ
ππ
π

130
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
⎟⎠⎞
⎜⎝⎛+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−
=
−
−−−
3
3
3
3
3
322
3
3
2
3sin27
3cos3
3sin96
3sin3
31
xjj
xjjxxj
jjxj
jx
ππ
ππ
πππ
ππ
( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛−−= π
ππ
πj
jj
jcos54cos54
31
2222
( ) j
j136
22 −−=π
jb ( ) dxP
xjxfP
P
P⎟⎠⎞
⎜⎝⎛= ∫−πsin1 ท j = 1 , 2 , 3 , …
( ) dxxjx ⎟⎠⎞
⎜⎝⎛+−= ∫− 3
sin931 3
3
2 π
⎟⎠⎞
⎜⎝⎛ +−= ∫∫ −−
3
3
3
3
2
3sin9
3sin
31 dxxjdxxjx ππ
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛=
−−
−∫
3
3
3
3
3
3
2
3cos27
3cos6
3cos3
31 xj
jdxxjx
jxj
jx π
ππ
ππ
π
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
⎟⎠⎞
⎜⎝⎛−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛
=
−
−−−
3
3
3
3
3
322
3
3
2
3cos27
3sin3
3cos96
3cos3
31
xjj
xjjxxj
jjxj
jx
ππ
ππ
πππ
ππ
( ) ( )
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
+−
+−−=
ππ
ππ
ππ
ππ
ππ
ππ
jj
jj
jj
jj
jj
jj
cos27cos27
cos54cos54cos27cos27
31 3333
= 0
( ) ( )∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−−+=
122 3
cos1366j
j xjj
xf ππ

131
13.แสดง ทฤษฎ 5.6 วธทา Fourier Series ของ ( )xf บน [ ]pp,− คอ
( ) ∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+=
1
0 sincos2 j
nj Pxjb
Pxja
axf ππ
โดยท
0a ( )dxxfP
P
P∫−=1
ja ( ) dxP
xjxfP
P
P⎟⎠⎞
⎜⎝⎛= ∫−πcos1
jb ( ) dxP
xjxfP
P
P⎟⎠⎞
⎜⎝⎛= ∫−πsin1
ฟงกชน ( )xf แบงไดเปน ฟงกชนค กะ ฟงกชนค ถา ( )xf − = ( )xf จะเรยกวา ฟงกชนค สมบตของฟงกชนค มดงน - ผลคณของฟงกชนคไดฟงกชนค - ผลคณของฟงกชนคไดฟงกชนค - ผลบวก(ผลตาง)ของฟงกชนคไดฟงกชนค
ถา ( )xf ฟงกชนค ( ) ( )dxxfdxxfPP
P ∫∫ =− 0
2
ดงนนจะไดวา
0a ( )dxxfP
P
∫=0
2
ja ( ) dxP
xjxfP
P⎟⎠⎞
⎜⎝⎛= ∫πcos2
0
jb = 0
( ) ∑∞
=⎟⎠⎞
⎜⎝⎛+=
1
0 cos2 j
j Pxja
axf π เรยกวา Cosine Series

132
14.แสดง ทฤษฎ 5.7 วธทา Fourier Series ของ ( )xf บน [ ]pp,− คอ
( ) ∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+=
1
0 sincos2 j
nj Pxjb
Pxja
axf ππ
โดยท
0a ( )dxxfP
P
P∫−=1
ja ( ) dxP
xjxfP
P
P⎟⎠⎞
⎜⎝⎛= ∫−πcos1
jb ( ) dxP
xjxfP
P
P⎟⎠⎞
⎜⎝⎛= ∫−πsin1
ฟงกชน ( )xf แบงไดเปน ฟงกชนค กะ ฟงกชนค ถา ( )xf − = ( )xf− จะเรยกวา ฟงกชนค สมบตของฟงกชนค มดงน - ผลคณของฟงกชนคกบคไดฟงกชนค - ผลบวก(ผลตาง)ของฟงกชนคไดฟงกชนค
ถา ( )xf ฟงกชนค ( ) 0=∫− dxxfP
P
ดงนนจะไดวา 0a = 0 ja = 0
jb ( ) dxP
xjxfP
P⎟⎠⎞
⎜⎝⎛= ∫πsin2
0
( ) ∑∞
=⎟⎠⎞
⎜⎝⎛=
1sin
jj P
xjbxf π เรยกวา Sine Series

133
อลกอรทมและโปรแกรม 1. ใชโปรแกรม 5.4 โดยกาหนด N = 12 จดและทาตามตวอยางท5.15เพอหาไตรโกนอลเมตรกโพลโนเมยวของดกร M=5 เพอทจะทาใหชองวางของสมการ ( )( ){ }12
1, =kkk xfx เมอ f(x) เปนฟงชนใน (ก.) การบานท1 (ข.) การบานท2 (ค.) การบานท3 และ (ง.) การบานท4 ในแตละกรณ ใหเขยนกราฟระหวางf(x), T5(x) และ ( )( ){ }12
1, =kkk xfx (ก.) function [A,B]=tpcoeff(X,Y,M) X=[-pi,pi]; Y=[-1,1]; M=5; N=length(X)-1; max1=fix((N-1)/2); if M>max1 M=max1; end A=zeros(1,M+1); B=zeros(1,M+1); Yends=(Y(1)+Y(N+1))/2; Y(1)=Yends; Y(N+1)=Yends; A(1)=sum(Y); for j=1:M A(j+1)=cos(j*X)*Y'; B(j+1)=sin(j*X)*Y'; end A=2*A/N; B=2*B/N; A(1)=A(1)/2; function z=tp(A,B,x,M) z=A(1); for j=1:M z=z+A(j+1)*cos(j*x)+B(j+1)*sin(j*x); end x=-pi:.01:pi; y=tp(A,B,x,M); plot(x,y,X,Y,'o')

134
(ข.) function [A,B]=tpcoeff(X,Y,M,x) X=[-pi,pi]; Y=[((-pi/2)+x),((pi/2)-x)]; M=5; N=length(X)-1; max1=fix((N-1)/2); if M>max1 M=max1; end A=zeros(1,M+1); B=zeros(1,M+1); Yends=(Y(1)+Y(N+1))/2; Y(1)=Yends; Y(N+1)=Yends; A(1)=sum(Y); for j=1:M A(j+1)=cos(j*X)*Y'; B(j+1)=sin(j*X)*Y'; end A=2*A/N; B=2*B/N; A(1)=A(1)/2; function z=tp(A,B,x,M) z=A(1); for j=1:M z=z+A(j+1)*cos(j*x)+B(j+1)*sin(j*x); end x=-pi:.01:pi; y=tp(A,B,x,M); plot(x,y,X,Y,'o')
(ค.) function [A,B]=tpcoeff(X,Y,M,x) X=[-pi,pi]; Y=[0,x]; M=5; N=length(X)-1; max1=fix((N-1)/2); if M>max1 M=max1; end A=zeros(1,M+1); B=zeros(1,M+1); Yends=(Y(1)+Y(N+1))/2; Y(1)=Yends; Y(N+1)=Yends; A(1)=sum(Y); for j=1:M A(j+1)=cos(j*X)*Y'; B(j+1)=sin(j*X)*Y'; end A=2*A/N; B=2*B/N; A(1)=A(1)/2; function z=tp(A,B,x,M) z=A(1); for j=1:M z=z+A(j+1)*cos(j*x)+B(j+1)*sin(j*x);

135
end x=-pi:.01:pi; y=tp(A,B,x,M); plot(x,y,X,Y,'o')
(ง.) function [A,B]=tpcoeff(X,Y,M,) X=[pi/2,pi,-pi/2]; Y=[-1,1,-1]; M=5; N=length(X)-1; max1=fix((N-1)/2); if M>max1 M=max1; end A=zeros(1,M+1); B=zeros(1,M+1); Yends=(Y(1)+Y(N+1))/2; Y(1)=Yends; Y(N+1)=Yends; A(1)=sum(Y); for j=1:M A(j+1)=cos(j*X)*Y'; B(j+1)=sin(j*X)*Y'; end A=2*A/N; B=2*B/N; A(1)=A(1)/2; function z=tp(A,B,x,M) z=A(1); for j=1:M z=z+A(j+1)*cos(j*x)+B(j+1)*sin(j*x); end x=-pi:.01:pi; y=tp(A,B,x,M); plot(x,y,X,Y,'o')

136
2. ใชโปรแกรม 5.4 เพอหาคาสมประสทธของ T5(x) ในตวอยางท 5.15 เมอตอนแรกเทากบ 60 หลงจากนนคอ 360 ในสมการชองวางทใช function [A,B]=tpcoeff(X,Y,M) X=[-pi,pi]; Y=X/2; M=5; N=length(X)-1; max1=fix((N-1)/2); if M>max1 M=max1; end A=zeros(1,M+1); B=zeros(1,M+1); Yends=(Y(1)+Y(N+1))/2; Y(1)=Yends; Y(N+1)=Yends; A(1)=sum(Y); for j=1:M A(j+1)=cos(j*X)*Y'; B(j+1)=sin(j*X)*Y'; end A=2*A/N; B=2*B/N; A(1)=A(1)/2; function z=tp(A,B,x,M) z=A(1); for j=1:M z=z+A(j+1)*cos(j*x)+B(j+1)*sin(j*x); end

137
3. ประยกตโปรแกรม 5.4 ในกรณทไตรโกนอลเมตรกโพลโนเมยวของจด 2P = B - A เมอขอมลของจดเปนสมการชองวางเหนอชวง [A,B] function [A,B]=tpcoeff(X,Y,M) X=[-pi,pi]; Y=X/2; M=5; N=length(X)-1; max1=fix((N-1)/2); if M>max1 M=max1; end A=zeros(1,M+1); B=zeros(1,M+1); Yends=(Y(1)+Y(N+1))/2; Y(1)=Yends; Y(N+1)=Yends; A(1)=sum(Y); for j=1:M A(j+1)=cos(j*X)*Y'; B(j+1)=sin(j*X)*Y'; end A=2*A/N; B=2*B/N; z=B-A; for j=1:M z=z+A(j+1)*cos(j*x)+B(j+1)*sin(j*x); end f=z/2;

138
4. ใชการประยกตจากขอทแลว หา T5(x) เพอ (ก.) f(x) ในการบานท 10, ใชขอมลจด 12 สมการชองวาง, และ function [A,B]=tpcoeff(X,Y,M) X=[-2,2]; Y=[0,1]; M=5; N=length(X)-1; max1=fix((N-1)/2); if M>max1 M=max1; end A=zeros(1,M+1); B=zeros(1,M+1); Yends=(Y(1)+Y(N+1))/2; Y(1)=Yends; Y(N+1)=Yends; A(1)=sum(Y); for j=1:M A(j+1)=cos(j*X)*Y'; B(j+1)=sin(j*X)*Y'; end A=2*A/N; B=2*B/N; z=B-A; for j=1:M z=z+A(j+1)*cos(j*x)+B(j+1)*sin(j*x); end f=z/2;
(ข.) ) f(x) ในการบานท 12, ใชขอมลจด 60 สมการชองวาง, และเขยนกราฟ T5(x) และขอมลจด function [A,B]=tpcoeff(X,Y,M) X=[-3,3]; Y=-x^2+9; M=5; N=length(X)-1; max1=fix((N-1)/2); if M>max1 M=max1; end A=zeros(1,M+1); B=zeros(1,M+1); Yends=(Y(1)+Y(N+1))/2; Y(1)=Yends; Y(N+1)=Yends; A(1)=sum(Y); for j=1:M A(j+1)=cos(j*X)*Y'; B(j+1)=sin(j*X)*Y'; end A=2*A/N; B=2*B/N; z=B-A; for j=1:M z=z+A(j+1)*cos(j*x)+B(j+1)*sin(j*x); end f=z/2;

139
ขอ 5 และ 6 ใชโปรแกรม Microsoft Excel และ Visual Basic 5. อณหภม(ฟาเรนไฮท)ตลอดทงวน ในวนท 8 พฤศจกายน ในเมองลอสแองเจอลส ในตาราง 5.10 โดยม 24 ขอมล (ก.) หาไตรโกนอลเมตรกโพลโนเมยวของ T7(x) (ข.) เขยนกราฟ T7(x) และขอมล 24ขอมล (ค.) ทาซาในขอ (ก.) และ (ข.) โดยใชอณหภมพนทของทาน
ตาราง5.10 เวลากลางคน องศาฟาเรนไฮท เวลากลางวน องศาฟาเรนไฮท
1 2 3 4 5 6 7 8 9 10 11
เทยงคน
66 66 65 64 63 63 62 61 60 60 59 58
1 2 3 4 5 6 7 8 9 10 11
เทยงวน
58 58 58 58 57 57 57 58 60 64 67 68

140
Sub Macro2()
'
ActiveCell.FormulaR1C1 = "66"
Range("A2").Select
ActiveCell.FormulaR1C1 = "66"
Range("A3").Select
ActiveCell.FormulaR1C1 = "65"
Range("A4").Select
ActiveCell.FormulaR1C1 = "64"
Range("A5").Select
ActiveCell.FormulaR1C1 = "63"
Range("A6").Select
ActiveCell.FormulaR1C1 = "63"
Range("A7").Select
ActiveCell.FormulaR1C1 = "62"
Range("A8").Select
ActiveCell.FormulaR1C1 = "61"
Range("A9").Select
ActiveCell.FormulaR1C1 = "60"
Range("A10").Select
ActiveCell.FormulaR1C1 = "60"
Range("A11").Select
ActiveCell.FormulaR1C1 = "59"
Range("A12").Select
ActiveCell.FormulaR1C1 = "58"
Range("A13").Select
ActiveCell.FormulaR1C1 = "58"
Range("A14").Select
ActiveCell.FormulaR1C1 = "58"
Range("A15").Select
ActiveCell.FormulaR1C1 = "58"

141
Range("A16").Select
ActiveCell.FormulaR1C1 = "58"
Range("A17").Select
ActiveCell.FormulaR1C1 = "57"
Range("A18").Select
ActiveCell.FormulaR1C1 = "57"
Range("A19").Select
ActiveCell.FormulaR1C1 = "57"
Range("A20").Select
ActiveCell.FormulaR1C1 = "58"
Range("A21").Select
ActiveCell.FormulaR1C1 = "60"
Range("A22").Select
ActiveCell.FormulaR1C1 = "64"
Range("A23").Select
ActiveCell.FormulaR1C1 = "67"
Range("A24").Select
ActiveCell.FormulaR1C1 = "68"
Range("A1:A24").Select
Charts.Add
ActiveChart.ChartType = xlXYScatterSmooth
ActiveChart.SetSourceData Source:=Sheets("Sheet1").Range("A1:A24"), PlotBy _
:=xlColumns
ActiveChart.Location Where:=xlLocationAsNewSheet
With ActiveChart
.HasTitle = False
.Axes(xlCategory, xlPrimary).HasTitle = False
.Axes(xlValue, xlPrimary).HasTitle = False
End With

142
ActiveChart.SeriesCollection(1).Select
ActiveChart.SeriesCollection(1).Trendlines.Add(Type:=xlPolynomial, Order:=5 _
, Forward:=0, Backward:=0, DisplayEquation:=True, DisplayRSquared:= _
False).Select
End Sub
Ans y = 8E-06x5 - 0.0002x4 + 0.003x3 - 0.0158x2 - 0.7149x + 67.058
y = 8E-06x5
- 0.0002x4
+ 0.003x3
- 0.0158x2
- 0.7149x + 67.058
50
52
54
56
58
60
62
64
66
68
70
72
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25

143
6. ตาราง 5.11 เปนตารางเกยวกบอณหภม(องศาฟาเรนไฮท)ในรอบหนงปของ เมอง แฟรแบงคส รฐอลาสกา โดยมขอมล 13 ขอมล โดยเปนการตรวสสอบและเกบขอมลทกๆ 28 วน (ก.) หาไตรโกนอลเมตรกโพลโนเมยวของ T6(x) (ข.) เขยนกราฟ T6(x) และขอมล13 ขอมล
ตาราง 5.11 วนเวลาทเกบขอมล องศา(ฟาเรนไฮท)โดยเฉลย
1 ม.ค. 29 ม.ค. 26 ก.พ. 26 ม.ค. 23 เม.ย. 21 พ.ค. 18 ม.ย. 16 ก.ค. 13 ส.ค. 10 ก.ย. 8 ต.ค. 5 พ.ย. 3 ธ.ค.
-14 -9 2 15 35 52 62 63 58 50 34 12 -5

144
Sub Macro3()
'
Range("B1").Select
ActiveCell.FormulaR1C1 = "-14"
Range("B2").Select
ActiveCell.FormulaR1C1 = "-9"
Range("B3").Select
ActiveCell.FormulaR1C1 = "2"
Range("B4").Select
ActiveCell.FormulaR1C1 = "15"
Range("B5").Select
ActiveCell.FormulaR1C1 = "35"
Range("B6").Select
ActiveCell.FormulaR1C1 = "52"
Range("B7").Select
ActiveCell.FormulaR1C1 = "62"
Range("B8").Select
ActiveCell.FormulaR1C1 = "63"
Range("B9").Select
ActiveCell.FormulaR1C1 = "58"
Range("B10").Select
ActiveCell.FormulaR1C1 = "50"
Range("B11").Select
ActiveCell.FormulaR1C1 = "34"
Range("B12").Select
ActiveCell.FormulaR1C1 = "12"
Range("B13").Select
ActiveCell.FormulaR1C1 = "-5"
Range("A1:B13").Select
Charts.Add
ActiveChart.ChartType = xlXYScatterSmooth

145
ActiveChart.SetSourceData Source:=Sheets("Sheet1").Range("A1:B13"), PlotBy _
:=xlColumns
ActiveChart.Location Where:=xlLocationAsNewSheet
With ActiveChart
.HasTitle = False
.Axes(xlCategory, xlPrimary).HasTitle = False
.Axes(xlValue, xlPrimary).HasTitle = False
End With
ActiveChart.SeriesCollection(1).Select
ActiveChart.SeriesCollection(1).Trendlines.Add(Type:=xlPolynomial, Order:=6 _
, Forward:=0, Backward:=0, DisplayEquation:=False, DisplayRSquared:= _
False).Select
ActiveChart.SeriesCollection(1).Select
ActiveChart.PlotArea.Select
End Sub
Ans y = -0.0005x6 + 0.0224x5 - 0.3472x4 + 1.9838x3 - 1.9143x2 + 0.7739x - 14.315
y = - 0 . 0005 x 6 + 0 . 0224 x 5
- 0.3472x4
+ 1.9838x3
- 1.9143x2
+ 0.7739x - 14.315
-20
-10
0
10
20
30
40
50
60
70
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14

บรรณานกรม
1. สมชาย จตะพนธกล, การแปลงฟรเยรและการประยกต, สานกพมพจฬาลงกรณ
มหาวทยาลย, 2547
2. สธรรม ศรเกษม, เมธนทร ทรงชยกล, และสงา ศรศภปรดา, “MATLAB เพอการแกปญหา
ทางวศวกรรม, สานกพมพมหาวทยาลยรงสต, 2521.
3. D. Hanselman, B. Littlefield, “Mastering MATLAB: A comprehensice tutorial and
reference”, Prentice-Hall, 1995.
4. E. Kreyszig, “Advanced Engineering Mathematics”, 8th edition, John Wiley, 1999.
5. J.P. Holman, “Experimental Methods for Engineers”, 7 edition, McGraw-Hill, 2000.
6. R.D. Strum, D.E. Kirk, “Contemporary Linear Systems using MATLAB”, Books/Cole
Thomson Learning, 2000.
7. S.J. Chapman, “MATLAB Programming for Engineers”, 2nd edition, Thomson-
Engineering, 2001.

ประวตผเขยน
วรรณสร พนธอไร
สถานททางาน ภาควชาวศวกรรมโยธา คณะวศวกรรมศาสตร มหาวทยาลยมหดล 25/25 ถนน พทธมณฑลสาย 4, ศาลายา, นครปฐม 73170 โทรศพธ: (+66) 02-889-2138 ext. 6391 แฟกซ: (+66) 02-889-2138 ext. 6388
การศกษา - วศ.บ. โยธา มหาวทยาลยมหดล (เกยรตนยมอนดบสอง)
- M.S., Civil Engineering (Structural Engineering) New Jersey Institute of Technology, New Jersey, USA
- Ph.D., Civil and Environmental Engineering (Major: Structural, Mechanics and Materials) Georgia Institute of Technology, Georgia, USA (Minor: Geotechnical Engineering)
ผลงานวชาการ - Punurai, S., Punurai, W., Hsu ,C.-T.T.(2007), "A very early strength concrete for highway construction", Journal of Testing and Evaluation, 35(6), 9 pages. - Punurai, W., Jarzynski, J., Qu, J., Kurtis, K.E., and Jacobs, L.J. (2007), "Characterization of dissipation losses in cement paste with diffuse ultrasound" , Mechanics Research Communication, 34(3), pp. 289-294. - Punurai, W., Jarzynski, J., Qu, J., Kim, J.-Y., Jacobs, L.J., and Kurtis, K.E. (2007), "Characterization of multi-scale porosity in cement paste by advanced ultrasonic techniques", Cement and Concrete Research, 37(1), pp. 38-46. - Punurai, W., Jarzynski, J., Qu, J., Kurtis, K.E., and Jacobs, L.J. (2006), "Characterization of entrained air voids in cement paste with scattered ultrasound," NDT & E International, 39(6), pp. 514-524. - Hsu ,C.-T.T., Punurai, W., Jia, Y., Bian, H. (2006), "Direct Shear Behavior of Carbon Fiber-Reinforced Polymer Laminates and Concrete", Journal of Testing and Evaluation, 34(3), pp. 158-166.

148
- Hsu ,C.-T.T., Punurai, W., Bian, H., Jia, Y. (2003), "Flexural strengthening of reinforced concrete Beams using carbon fibre reinforced polymer strips", Magazine of Concrete Research, 55(3), pp. 279-288. - Luangviliai, K., Punurai, W., Jacobs, L.J. (2002), "Guided Lamb wave propagation in composite plate/concrete component", Journal of Engineering Mechanics, 128(12), pp. 1337-1341.