e:/klausuren/wise12/rt-120210/tex/vorlage klausur de · = ˙ut +u. p. universitÄt duisburg-essen...
TRANSCRIPT
UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2012
90 Minuten Seite 1
Einlesezeit
Für die Durchsicht der Klausur wird eine „Einlesezeit“ von 10 Minuten gewährt. Während dieserZeitdauer ist es Ihnen nicht gestattet, mit der Bearbeitung der Aufgaben zu beginnen. Dies bedeu-tet konkret, dass sich während der gesamten Dauer der Einlesezeit keinerlei Schreibgeräte (Stifte,Füller, etc.) auf dem Tisch befinden dürfen sowie die Nutzung von mitgeführten Unterlagen re-spektive (elektronischer) Wörterbücher bzw. tragbarer Translater strengstens untersagt ist. NehmenSie Ihre Schreibgeräte und Unterlagen erst zur Hand, wenn die Prüfungsaufsicht auf das Ende derEinlesezeit hingewiesen hat und füllen Sie zunächst das Deckblatt sowie Seite 3 vollständig aus.
Viel Erfolg!
NAME
VORNAME
MATRIKEL-NR.
TISCH-NR.
Klausurunterlagen
Ich versichere hiermit, dass ich sämtliche für die Durchführung der Klausur vorgesehenen Unter-lagen erhalten, und dass ich meine Arbeit ohne fremde Hilfe und ohne Verwendung unerlaubterHilfsmittel und sonstiger unlauterer Mittel angefertigt habe. Ich weiß, dass ein Bekanntwerden sol-cher Umstände auch nachträglich zum Ausschluss von der Prüfung führt. Ich versichere weiter, dassich sämtliche mir überlassenen Arbeitsunterlagen sowie meine Lösung vollständig zurück gegebenhabe. Die Abgabe meiner Arbeit wurde in der Teilnehmerliste von Aufsichtsführenden schriftlichvermerkt.
Duisburg, den(Unterschrift der/des Studierenden)
Falls Klausurunterlagen vorzeitig abgegeben: Uhr

Bewertungstabelle
Aufgabe 1
Aufgabe 2
Aufgabe 3
Gesamtpunktzahl
Angehobene Punktzahl
%
Bewertung gem. PO
in Ziffern
(Datum und Unterschrift 1. Prüfer, Univ.-Prof. Dr.-Ing. Dirk Söffker)
(Datum und Unterschrift 2. Prüfer, Dr.-Ing. Yan Liu)
(Datum und Unterschrift des für die Prüfung verantwortlichen Prüfers, Söffker)
Fachnote gemäß Prüfungsordnung:
� � � � � � � � � � �
1,0 1,3 1,7 2,0 2,3 2,7 3,0 3,3 3,7 4,0 5,0sehr gut gut befriedigend ausreichend mangelhaft
Bemerkung:

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2012
Seite 3
Hinweise
Achtung: Schreiben Sie Ihre Antwort für ALLE Aufgabendirekt unter die entsprechende Aufgabe in den Aufgabenbogen!
Verwenden Sie KEINE Bleistifte oder roten Stifte für dieBeantwortung von Fragen oder für Zeichnungen! (Rote Stifte werdebei der Korrektur verwendet.)
Diese Prüfung lege ich ab als� Pflichtfach� Wahlfach� Auflage(Bitte ankreuzen.)
Maximal erreichbare Punktzahl: 60
Mindestprozentzahl für die Note 1,0: 95%
Mindestprozentzahl für die Note 4,0: 50%

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2012
Seite 4
Aufgabe 1 (15 Punkte)
1a) (2 Punkte)Zeichnen Sie den Funktionsverlauf m(t) für die gegebene Laplacetransformierte
M(s) = 6e−2s
3s − 3e−3s
2s + 6e−6s − 4e−8s
8s .
1 2 3 4 5 60
1
2
3
7 8 9
m(t)
t
Abbildung 1.1: Funktionsverlauf

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2012
Seite 5
1b) (2 Punkte)Gegeben Sie die Übergangsfunktion h(t) Abb. 1.2
0
h(t)
t
Abbildung 1.2: Übergangsfunktion
Welche Übertragungsfunktion beschreibt das Verhalten des in Abb. 1.2 gegebenen Verhaltens?
Kreuzen Sie die richtige(n) Antwort(en) an. Es sind mehrere Lösungen möglich.
© G(s) = P © G(s) = PIDT1
© G(s) = PDT1 © G(s) = PIDT2

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2012
Seite 6
1c) (4 Punkte)Geben Sie das Ein-/Ausgangsverhalten eines PIT2-Systems in Form einer Übertragungsfunk-tion an. Geben Sie hierbei zunächst allgemein alle Pole und Nullstellen an. Zeichnen Siedas zugehörige Bode-Diagramm für ein System mit den Parametern k = 10, w0 = 2, D = 0und TI = 0.5 in das nachfolgende Diagramm ein. Zeichnen Sie hierzu zunächst das exakte(quantitativ) approximierte Bode-Diagramm und anschließend den realen Verlauf ein (Hinweislog(10)=1). Nutzen Sie hierfür das Diagramm auf der nächsten Seite.
Übertragungsfunktion
Y (s)
U(s)=
K(1 + TIs)
TIs( 1w2
0
s2+2Dw0
s+1)
Nullstelle ⇒ s = −1TI
Pole s1 = 0 s2,3 = w0(−D ±√
D2 − 1)

UNIVERSITAT DUISBURG-ESSENFakultat fur Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2012
Seite 7
-50
0
50
100
150
200
10-2
10-1
100
101
102
-180
-90
-45
-135
w=2
-225
ω [rad/s]
-20 dB
Dec
-40 dB
Dec
|GO1|[ dB]
φ[◦]
Bodediagramm

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2012
Seite 8
1d) (3 Punkte)
Gegeben ist das System A,B,C mit A =
[0 1−1 −1
], B =
[0 b
]T, C =
[c 0
], wobei c = 1.
Welche Übertragungsfunktion beschreibt das genannte System?
Kreuzen Sie die richtige(n) Antwort(en) an. Es sind mehrere Lösungen möglich.
© G(s) = bs2 + s + 1
© G(s) = bcs2 + s + 1
© G(s) = bc(s2 + s − 1)
© G(s) = cb(s2 + s + 1)
UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2012
Seite 9
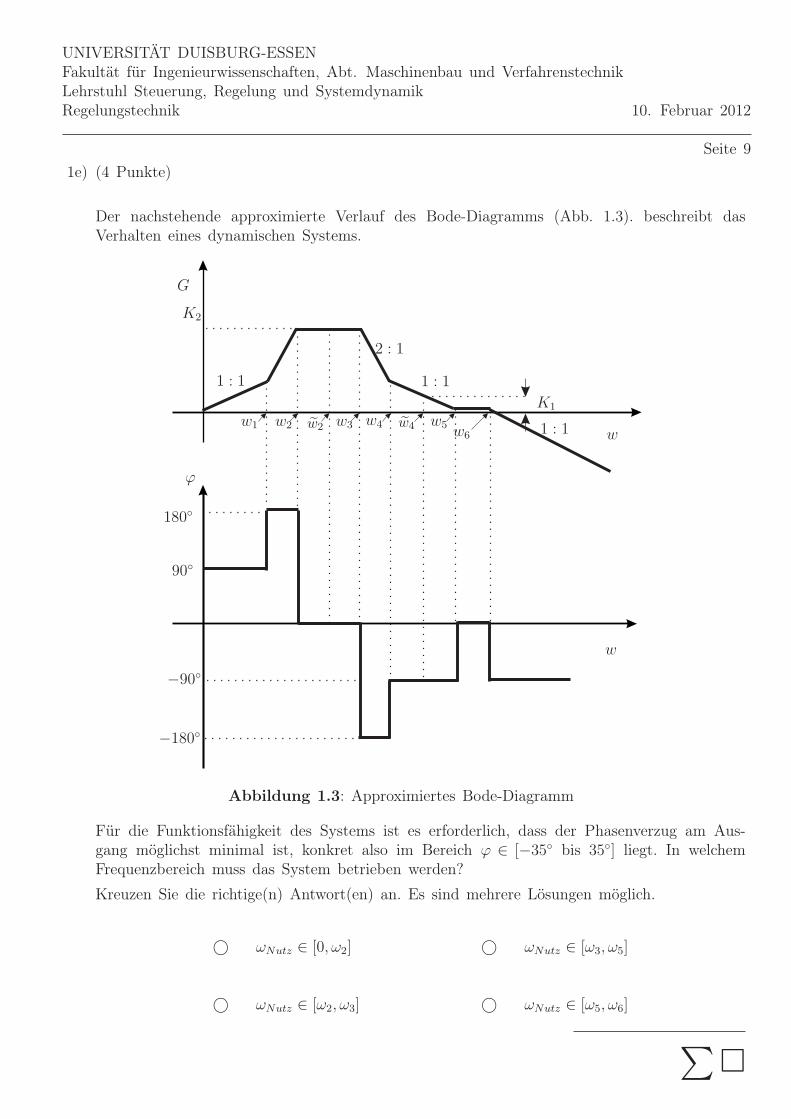
1e) (4 Punkte)
Der nachstehende approximierte Verlauf des Bode-Diagramms (Abb. 1.3). beschreibt dasVerhalten eines dynamischen Systems.
w
w
1 : 1
1 : 11 : 1
2 : 1
w1 w2 w3 w4 w5w6
w4w2
G
K1
K2
90◦
−90◦
−180◦
180◦
ϕ
Abbildung 1.3: Approximiertes Bode-Diagramm
Für die Funktionsfähigkeit des Systems ist es erforderlich, dass der Phasenverzug am Aus-gang möglichst minimal ist, konkret also im Bereich ϕ ∈ [−35◦ bis 35◦] liegt. In welchemFrequenzbereich muss das System betrieben werden?
Kreuzen Sie die richtige(n) Antwort(en) an. Es sind mehrere Lösungen möglich.
© ωNutz ∈ [0, ω2] © ωNutz ∈ [ω3, ω5]
© ωNutz ∈ [ω2, ω3] © ωNutz ∈ [ω5, ω6]
∑�

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2012
Seite 10
Aufgabe 2 (20 Punkte)Der in Abbildung 2.1 dargestellte Regelkreis besteht aus einem Regler GR(s), einer Strecke GS(s)und einem Übertragungselement GM(s), das die dynamischen Eigenschaften eines Messglieds be-schreibt.
W (s) E(s) U(s) X(s)
Y (s)
GR(s) GS(s)
GM(s)
-
Abbildung 2.1: Blockschaltbild des Systems
Das Übertragungsverhalten der Strecke GS(s) wird durch die Differenzialgleichung
10x(t) + 7x(t) + 3x(t) = u(t) +
∫u(t)dt mit x(0) = x(0) = 0
beschrieben.Das Übertragungsverhalten des Übertragungselements GR(s) wird durch die Differenzialgleichung
u(t) = 3e(t) + 2e(t)
beschrieben.Das Übertragungsverhalten des Übertragungselements GM(s) wird durch die Differenzialgleichung
2y(t) + 3y(t) = x(t) mit y(0) = 0
beschrieben.
2a) (3 Punkte)Bestimmen Sie die Übertragungsfunktionen für die Strecke GS(s) = X(s)
U(s), für den Regler
GR(s) = U(s)E(s)
und für das Übertragungselement GM(s) = Y (s)X(s)
.
GS(s) =s + 1
s(10s2 + 7s + 3)
GR(s) = 2s + 3
GM(s) =1
(2 + 3s)

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2012
Seite 11
2b) (2 Punkte)Wie lautet die Übertragungsfunktion des offenen Regelkreises Go(s) = X(s)
E(s)?
GO(s) =(s + 1)(2s + 3)
s(10s2 + 7s + 3)
Ist der offene Regelkreis GO(s) asymptotisch stabil? Kreuzen Sie die richtige(n) Antwort(en)an. Es sind mehrere Lösungen möglich.
© Asymptotisch stabil, weil spi < 0.
© Nicht asymptotisch stabil, weil spi > 0.
© Nicht asymptotisch stabil, weil spi ≤ 0.
© Asymptotisch stabil, weil spi ≤ 0.

���������� ������� ������������� ��� ����������������������� !"�# $��������"�� ��% �����������������&�������� ��������� �������� ��% �'���(%'��(������������������ )*# ��"���� +*)+
����� )+
�� J"����������1�������� %�� 2B���� ������������ ���% �( �2����%�� %����
G�(s) =(3s− 1)(2s+ 3)
s(10s2 + 7s+ 1)
"�������"��#
+�6 5F ;�����6��������� ��� %�� ;���� ��% %�� !(8����%� %�� J"����������������2� %�� 2B���� �� ���������� ��� ω → 0 ��% ω → +∞# 4������� ��� M��������1 5%#�# �88�2I�(���16 %���2%�%�����(( ��% %�� =������1� %�� 2B���� ������������# ����������� ��� %�� ����1�� ��� ������M���/�� ��% ���������� %�� J"����������������2�#
s�� = 0, 33 ��% s�� = −1, 5s� = 0 s� = −0, 5 ��% s = −0, 2
|G(j0)| = ∞ ϕ(j0) = 90◦
|G(j∞)| = 0 ϕ(j∞) = −90◦
���� ���� ���A �2%�%�����((
����� (���(��8�����

���������� ������� ������������� ��� ����������������������� !"�# $��������"�� ��% �����������������&�������� ��������� �������� ��% �'���(%'��(������������������ )*# ��"���� +*)+
����� )<
-5 0 5 10 15 20 25 30
-300
-200
-100
0
100
200
300
Polar Plot
Real Axis
Imagin
ary
Axis
���� ���� ���A =������1�
+%6 5E ;�����6�� ���"�������1�������� %�� ������2������ ������������ �2�� ��� ����� %�� 2B���� �'���(�G�(s) (��
G�(s) =2s+ 3
10s2 + 7s+ 1
(�� ������1�� �����288���� (�� :���� ����� 3��/��2������1� 53=-6 ���������� ���%��#��"�� ��� %�� M��������1�� ������� %�� 3=- ��#

���������� ������� ������������� ��� ����������������������� !"�# $��������"�� ��% �����������������&�������� ��������� �������� ��% �'���(%'��(������������������ )*# ��"���� +*)+
����� )E
���� ���� ���A 3��/��2������1�
+�6 5+ ;�����63����� M��������1� 5����� ### ���� ��2? �2������ 3����6 �(8������� �9���� ��� ��� %�� 3���%�� ����(�1���������� ����8������ ���� %�� �'���(1�������� ����� (�I�(���� ���"������� ���% r 5(�� r = |Re(λi)| ��� %�� ���"��� λi (�� (���(���� ��������6 ��������� �2��K ���/����� ����"�� ��� ������%��� ���# ���� ������������������ %�� 3=- ����� +%6 2%�� /���������� %�� &��� %�� /������%�� ;2�� ���#

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2012
Seite 15
2f) (4 Punkte)Zwei Systeme werden gemäß Abbildung 2.5 angeordnet. Das dynamische Verhalten von Sy-stem 1 ist
T u1 + u1 = K2y,
das von System 2 ist
u2 = (K1 − K2)y + TDK2y.
System 1 Schalter
+
+
System 2
y u
u1
u2
Abbildung 2.5: Blockschaltbild
Klassifizieren Sie die Úbertragungseigenschaften der Komponenten.Geben Sie das Übertragungsverhalten des Gesamtsystems bei geschlossenem Schalter alsÜbertragungsfunktion an.Geben Sie das Übertragungsverhalten des Gesamtsystems bei geschlossenem Schalter als E/A-Beziehung im Zeitbereich an (u(t = 0) = y(t = 0) = y(t = 0) = 0).
System 1 PT1,System 2 PD
G1(s) =K2
Ts + 1
G2(s) = K2 − K1 + TDK2s
G(s) = G1(s) + G2(s)
G(s) =K1 + s(TDK2 + TK1 − TK2) + TTDK2s
2
Ts + 1
yK1 + y(TDK2 + TK1 − TK2) + yTTDK2 = uT + u
∑�

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2010
Seite 16
Aufgabe 3 (Musterlösung)Für einen elektrischen Linearmotor soll eine Positionsregelung entworfen werden.Die Geschwindigkeit v(t) = p(t) kann in Abhängigkeit der anliegenden Klemmenspannung u(t)näherungsweise durch
T2
∫∫v(t) dt dt + T1
∫v(t) dt + v(t) = k1
∫u(t) dt + k2
∫∫u(t) dt dt
angegeben werden.Die Positionsregelung soll mit Hilfe eines Reglers mit dem Übertragungsverhalten
u(t) = kR p(t)
realisiert werden. Der Regler wird in Gegenkopplung (negative Rückführung) zum Linearmotorverschaltet.Hinweis: Bringen Sie die Beschreibungen zunächst in eine lösungsadäquate Form.
3a) (6 Punkte)Klassifizieren Sie das Übertragungsverhalten GS(s) = v(s)
u(s)und GR(s) = u(s)
p(s)von Strecke und
Regler. Geben Sie die Übertragungsfunktion GO(s) mit entsprechender Klassifikation für denoffenen Regelkreis an.
Lösung:
Motor:
T2 v + T1 v + v = k1 u + k2
∫u dt ⇒ PIT2
GS(s) =v(s)
u(s)=
1s
k2 + k1
T2 + T1s + s2
Regler:u = kR p ⇒ P
GR(s) =u(s)
p(s)= kR
Offener Regelkreis:
GR(s) =u(s)
v(s)=
1
skR GO(s) =
s kRk1 + k2kR
s(T2 + T1s + s2)⇒ PIT2

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2010
Seite 17
3b) (3 Punkte)Geben Sie die Übertragungsfunktionen GW(s) und GD(s) für das Führungs- und Störver-halten des Gesamtsystems (Linearmotor mit Positionsregelung in Gegenkopplung) an undklassifizieren Sie, falls möglich, das jeweilige Verhalten.
Lösung:
GW(s) =GO
1 + GO
=
s kRk1 + k2kR
s(T2 + T1s + s2)
1 +s kRk1 + k2kR
s(T2 + T1s + s2)
=s kRk1 + k2kR
(s(T2 + T1s + s2)) + (s kRk1 + k2kR)
⇒ PDT3
GD(s) =1
1 + GO
=1
1 +s kRk1 + k2kR
s(T2 + T1s + s2)
=s(T2 + T1s + s2)
(s(T2 + T1s + s2)) + s kRk1 + k2kR
⇒ (nicht klassifizierbar)

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2010
Seite 18
3c) (9 Punkte)Drei Systeme werden jeweils mit einem P-Regler in Gegenkopplung geregelt. Für die Über-tragungsfunktionen des jeweiligen offenen Kreises wurden folgende Pole und Nullstellen be-stimmt:
System 1:Nullstellen: s01 = −4 + i; s02 = −4 − i; s03 = −5Polstellen: s1 = −2 + i; s2 = −2 − i; s3 = −2 s4 = −1
System 2:Nullstellen: s01 = −3 + i; s02 = −3 − i
Polstellen: s1 = −1; s2 = −0, 5; s3 = −1 + i; s4 = −1 − i
System 3:Nullstellen: s01 = −1; s02 = −2Polstellen: s1 = 1 + i; s2 = 1 − i s3 = 1
Begründen Sie anhand von qualitativ gezeichneten Wurzelortskurven, welches dieser Systeme fürwelche Fälle stabil ist. Führen Sie ggf. Fallunterscheidungen durch.
Lösung:
System 1:
⇒ stabil

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2010
Seite 19
System 2:
⇒ instabil, falls k>kkrit
System 3:
⇒ stabil für k>kkrit

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2010
Seite 20
3d) (7 Punkte)Eine Regelstrecke GS(s) mit
GS(s) =4 + 1
s
s2 + 3s + 2
soll mit einem Regler mit der Übertragungsfunktion GR = 42s+1
esTt in Gegenkopplung geregeltwerden. Bestimmen Sie für das resultierende offene System die Übertragungsfunktion undleiten Sie hieraus die Null- und Polstellen sowie qualitativ (zu zeichnen ist zunächst dasapproximierte Verhalten) das Bodediagramm und die dazugehörige Ortskurve ab. BestimmenSie im Bodediagramm grafisch den Phasen- und den Amplitudenrand für den geschlossenenRegelkreis.
Bestimmen Sie näherungsweise die maximale Totzeit Tt zum Erreichen der Stabilitätsgrenze.Hinweis: Für den Phasengang ϕ(ω) eines Totzeitelements gilt
ϕ(ω) = −ωTt.
Lösung:
GO(s) =4 + 16s
2s4 + ts3 + ts2 + 2se−sTt
s01 = −14, s1 = 0, s2 = −1
2, s3 = −1, s4 = −2
Bodediagramm:

UNIVERSITÄT DUISBURG-ESSENFakultät für Ingenieurwissenschaften, Abt. Maschinenbau und VerfahrenstechnikLehrstuhl Steuerung, Regelung und SystemdynamikRegelungstechnik 10. Februar 2010
Seite 21
Ortskurve:
Bestimmung Phasenreserve (qualitative Lösung ausreichend):s∗ aus A(s∗) = 1 ⇒ s∗ = 100,2 ≈ 1, 6φ(s∗) ≈ −178◦ ⇒ −2◦ = −1, 6T ∗
t ⇒ Tt ≈ 1, 25
∑�