embedded systems programming -...
TRANSCRIPT

GUT – Intel 2015/16 1/34
Embedded Systems ProgrammingOS Linux - Toolchain
Iwona Kochanska
Gdansk University of Technology

GUT – Intel 2015/16 2/34
Embedded software
Toolchaincompiler and tools for hardware-
dependent software developement
Boot-loader
initializes hardwareand loads OS kernel
Kernela heart of a system, man-ages resources and com-municates with hardware
Rootfilesys-
temlibraries and applications

GUT – Intel 2015/16 3/34
What is toolchain?
Toolchain - set of tools that compiles source code into executablesthat can run on the target device, and includes:
I a compiler,I a linker,I run-time libraries
Toolchain is needed to build the other three elements of anembedded Linux system:
I the bootloader,I the kernel,I the root filesystem.

GUT – Intel 2015/16 4/34
What is Toolchain?
I Toolchain has to be able to compile code written in assembly, C,and C++ since these are the languages used in the base opensource packages
I Usually, toolchains for Linux are based on components from theGNU project (http://www.gnu.org)
I Alternative: Clang compiler and the associated LLVM project(http://llvm.org)

GUT – Intel 2015/16 5/34
Toolchain components
Standard GNU toolchain consists of three main components:I Binutils: binary utilities including assembler, linker, ld. It is
available at http://www.gnu.org/software/binutils/.I GNU Compiler Collection (GCC): the compilers for C and other
languages, include C++, Objective-C, Objective-C++, Java,Fortran, Ada, and Go. It is available at http://gcc.gnu.org/.
I C library: a standardized API based on the POSIX specificationwhich is the principle interface to the operating system kernelfrom applications.
... and a copy of the Linux kernel headers.

GUT – Intel 2015/16 6/34
Cross-compilation
Basic definitions:I build: Also called the local platform, the platform that you
physicaly perform the compiling on (for example PC with Debiandistribution)
I target: The destination platform (for example Raspberry Pi)I host: OS providing virtual environmentI guest: OS in virtual environment
GUT – Intel 2015/16 7/34
Cross-compilation
There are two main problems in cross-compiling:I All C/C++ include files and libraries for the target must be
available on the build platform.I The cross-compiler and related tools must generate code
suitable for the target platform.
GUT – Intel 2015/16 8/34
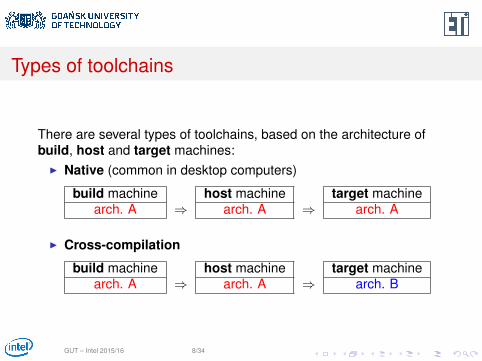
Types of toolchains
There are several types of toolchains, based on the architecture ofbuild, host and target machines:
I Native (common in desktop computers)
build machine host machine target machinearch. A ⇒ arch. A ⇒ arch. A
I Cross-compilation
build machine host machine target machinearch. A ⇒ arch. A ⇒ arch. B

GUT – Intel 2015/16 9/34
Types of toolchains
I Cross-nativebuild machine host machine target machine
arch. A ⇒ arch. B ⇒ arch. B
I Canadianbuild machine host machine target machine
arch. A ⇒ arch. B ⇒ arch. C

GUT – Intel 2015/16 10/34
CPU architectures
The toolchain has to be built according to the capabilities of the targetCPU, which includes:
I CPU architecture: arm, mips, x86_64, and so onI Big- or little-endian operation: Some CPUs can operate in
both modes, but the machine code is different for eachI Floating point support: Not all versions of embedded
processors implement a hardware floating point unit, in whichcase, the toolchain can be configured to call a software floatingpoint library instead
I Application Binary Interface (ABI): The calling conventionused for passing parameters between function calls

GUT – Intel 2015/16 11/34
ARM ABI architectures
I OABI - Old Application Binary Interface (OABI) - discontinued2011
I EABI - Extended Application Binary Interface (EABI) - generalpurpose (integer) registers
I EABIHF - Hard Float Extended Application Binary Interface -uses floating point registers.

GUT – Intel 2015/16 12/34
GNU prefix
GNU uses a prefix consisting of a tuple of three or four componentsseparated by dashes:
I CPU: arm, mips, x86_64, el = little-endian, eb = big-endian;e.g. armeb = big-endian ARM
I Vendor, e.g. pokyI Kernel, e.g. linuxI Operating system: a name for the user space component,
which might be gnu or uclibcgnu. The ABI may be appended(gnueabi, gnueabihf, uclibcgnueabi, or uclibcgnueabihf).
$ gcc −dumpmachinex86_64−l i nux−gnu

GUT – Intel 2015/16 13/34
C library
I The programming interface to theUnix operating system is defined inthe C language (POSIX standards).
I The C library is the implementationof that interface (gateway to thekernel for Linux programs).
I Whenever the C library needs theservices of the kernel it will use thekernel system call interface totransition between user space andkernel space.

GUT – Intel 2015/16 14/34
C libraries
I glibc - standard GNU C library, most complete implementation ofthe POSIX API
I eglibc - embedded GLIBC; a series of patches to glibc whichadded configuration options and support for architectures notcovered by glibc; merged back into glibc as of version 2.20
I uClibc - micro controller C library; first developed to work withuClinux (Linux for CPUs without memory management units), buthas since been adapted to be used with full Linux
I musl libc - new C library designed for embedded systems.

GUT – Intel 2015/16 15/34
Building a toolchain using crosstool-NG
Crosstool-NG (2007) - a way to create a stand-alone cross toolchainfrom sourceSoC or board vendorInstall:
$ sudo apt−get i n s t a l l automake bison chrpath f l e x g++ g i t gper f gawk l ibexpa t1−dev l ibncurses5−dev l i b s d l 1 .2−dev l i b t o o lpython2.7−dev t e x i n f o
Download sources from http://crosstool-ng.org/download/crosstool-ngand:
$ t a r x f c ross too l−ng−1.9 .3 . t a r . bz2$ cd cross too l−ng−1.9.3$ . / con f igu re$ make$ make i n s t a l l
–enable-local option - program will be installed into the currentdirectory, instead of /usr/local/bin.

GUT – Intel 2015/16 16/34
Building a toolchain using crosstool-NG
Launch the crosstool menu:
$ . / c t−ng
List of sample configurations
$ . / c t−ng l i s t −samples
Select target configuration:
$ . / c t−ng arm−cortex_a8−l i nux−gnueabi
Make changes using the configuration menu:
$ . / c t−ng menuconfig
The configuration data is saved into a file named .config.Build the toolchain:
$ . / c t−ng b u i l d
GUT – Intel 2015/16 17/34
Building a toolchain using crosstool-NG
Toolchain directory:
arm−cortex_a8−l i nux−gnueabi / b in /
Add directory to the cross compiler to PATH:
$ PATH = / . . . / arm−cortex_a8−l i nux−gnueabihf / b in :$PATH
Compile helloworld.c:
$ arm−cortex_a8−l i nux−gnueabihf−gcc he l l owo r l d . c −o he l l owo r l d
Check the type of the executable:
$ f i l e he l l owo r l dhe l l owo r l d : ELF 32− b i t LSB executable , ARM, vers ion 1 (SYSV) , dynamica l ly l i n k e d ( uses shared l i b s ) , f o r GNU/ Linux 3 .15 .4 , not s t r i p ped
GUT – Intel 2015/16 18/34
Building a toolchain using crosstool-NG
Check the cross-compiler version:
$ arm−cortex_a8−l i nux−gnueabi−gcc −−vers ion
Check the cross-compiler configuration:
$ arm−cortex_a8−l i nux−gnueabi−gcc −v
Print out the the range of architecture-specific options available:
$ arm−cortex_a8−l i nux−gnueabihf−gcc −−t a rge t−help

GUT – Intel 2015/16 19/34
Building a toolchain using crosstool-NG
The toolchain sysroot - a directory which contains subdirectories forlibraries, header files, and other configuration files.
I It can be set when the toolchain is configured through–with-sysroot=or it can be set on the command line, using –sysroot=.
I Check the location of the default sysroot:
$ arm−cortex_a8−l i nux−gnueabi−gcc −p r i n t−sysroo t

GUT – Intel 2015/16 20/34
Building a toolchain using crosstool-NG
Sysroot contains:I lib: shared objects for the C library and the dynamic linker/loader,I ld-linux usr/lib: the static library archives for the C library and
any other libraries that may be installed subsequentlyI usr/include: headers for all the librariesI usr/bin: utility programs that run on the target, such as the ldd
commandI usr/share: used for localization and internationalizationI sbin: Provides the ldconfig utility, used to optimize library loading
pathsSome of these are needed on the development host to compileprograms, others are needed on the target at runtime.
GUT – Intel 2015/16 21/34
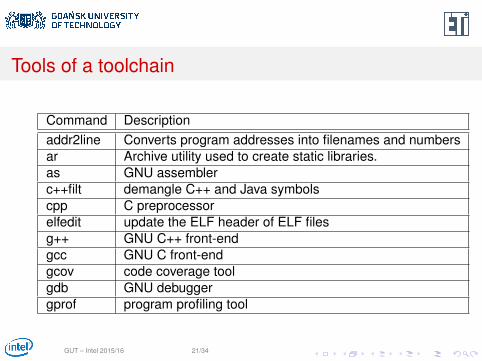
Tools of a toolchain
Command Descriptionaddr2line Converts program addresses into filenames and numbersar Archive utility used to create static libraries.as GNU assemblerc++filt demangle C++ and Java symbolscpp C preprocessorelfedit update the ELF header of ELF filesg++ GNU C++ front-endgcc GNU C front-endgcov code coverage toolgdb GNU debuggergprof program profiling tool

GUT – Intel 2015/16 22/34
Tools of a toolchain
Command Descriptionld GNU linkernm list of symbols from object filesobjcopy used to copy and translate object filesobjfump display information from object filesranlib creates or modifies an index in a static library, making the linking stage fasterreadelf displays information about files in ELF object formatsize lists section sizes and the total sizestrings display strings of printable characters in filesstrip strip an object file of debug symbol tables
GUT – Intel 2015/16 23/34
C library
Four main parts implement POSIX standardI libc: main C library that contains the well-known POSIX
functions (printf, open, close, read, write)I libm: maths functions (cos, exp, log)I libpthread: all the POSIX thread functions with names beginning
with pthread_I librt: The real-time extensions to POSIX, including shared
memory and asynchronous I/Olibc is always linked in but the others have to be explicitly linked withthe -l option
arm−cortex_a8−l i nux−gnueabihf−gcc myprog . c −o myprog −lm

GUT – Intel 2015/16 24/34
C library
Which libraries have been linked?
$ arm−cortex_a8−l i nux−gnueabihf−r e a d e l f −a myprog | grep " Shared l i b r a r y "0x00000001 (NEEDED) Shared l i b r a r y : [ l ibm . so . 6 ]0x00000001 (NEEDED) Shared l i b r a r y : [ l i b c . so . 6 ]
Check the run-time linker:
$ arm−cortex_a8−l i nux−gnueabihf−r e a d e l f −a myprog | grep " program i n t e r p r e t e r " [ Requesting program i n t e r p r e t e r : / l i b / ld−l i nux−armhf . so . 3 ]

GUT – Intel 2015/16 25/34
Static and dynamic linking
The library code can be linked in two different ways:I statically - all the library functions the application calls and their
dependencies are pulled from the library archive and bound intothe executable;
I dynamically - references to the library files and functions inthose files are generated in the code but the actual linking isdone dynamically at runtime

GUT – Intel 2015/16 26/34
Static libraries
Static linking is useful:I when building a small system which consists of only BusyBox
and some script files, it is simpler to link BusyBox statically andavoid having to copy the runtime library files and linker
I when running a program before the filesystem that holds theruntime libraries is available
Tell gcc to link all libraries statically:
$ arm−cortex_a8−l i nux−gnueabihf−gcc −s t a t i c he l l owo r l d . c −o he l lowor ld−s t a t i c

GUT – Intel 2015/16 27/34
Static libraries
Creating a static library:
$ arm−cortex_a8−l i nux−gnueabihf−gcc −c tes t1 . c$ arm−cortex_a8−l i nux−gnueabihf−gcc −c tes t2 . c$ arm−cortex_a8−l i nux−gnueabihf−ar rc l i b t e s t . a t es t1 . o tes t2 . o
Linking libtest into helloworld program:
$ arm−cortex_a8−l i nux−gnueabihf−gcc he l l owo r l d . c − l t e s t −L . . / l i b s − I . . / l i b s −o he l l owo r l d
GUT – Intel 2015/16 28/34
Shared libraries
I Shared objects linked at runtime,I Efficient use of storage and system memory, since only one copy
of the code needs to be loaded.I Easy to update library files without having to re-link all the
programs that use them.

GUT – Intel 2015/16 29/34
Shared libraries
Creating a shared library:
$ arm−cortex_a8−l i nux−gnueabihf−gcc −fPIC −c tes t1 . c$ arm−cortex_a8−l i nux−gnueabihf−gcc −fPIC −c tes t2 . c$ arm−cortex_a8−l i nux−gnueabihf−gcc −shared −o l i b t e s t . so tes t1 . o tes t2 . o
PIC flag tells GCC to produce code that does not contain referencesto specific memory locations for functions and variablesLinking libtest into helloworld program:
$ arm−cortex_a8−l i nux−gnueabihf−gcc he l l owo r l d . c − l t e s t −L . . / l i b s − I . . / l i b s −o he l l owo r l d
The linker will look for libtest.so in the default search path: /lib and/usr/lib.Other directories with shared libraries - place a colon-separated list ofpaths in the shell variable LD_LIBRARY_PATH
GUT – Intel 2015/16 30/34
Shared libraries names
ldd - searches the standard system library paths and shows whichlibrary versions would be used by a particular program.
ldd he l l owo r l d
Shared libraries names:I libjpeg.a: library archive used for static linkingI libjpeg.so -> libjpeg.so.8.0.2 : symbolic link, used for dynamic
linkingI libjpeg.so.8 -> libjpeg.so.8.0.2: symbolic link used when loading
the library at runtimeI libjpeg.so.8.0.2: actual shared library, used at both compile time
and runtime
GUT – Intel 2015/16 31/34
Build systems for cross compiling
I Simple makefiles where the toolchain is controlled by the makevariable CROSS_COMPILE
I The GNU build system known as AutotoolsI CMake (https://cmake.org)

GUT – Intel 2015/16 32/34
Simple makefiles
I For packages simple to cross compile (the Linux kernel, theU-Boot bootloader, Busybox)
I put the toolchain prefix in the make variable CROSS_COMPILE,for example:
$ make CROSS_COMPILE=arm−cortex_a8−l i nux−gnueabi−
I Or set it as a shell variable:
$ expor t CROSS_COMPILE=arm−cortex_a8−l i nux−gnueabi−$ make

GUT – Intel 2015/16 33/34
GNU Autotools
Autotools refers to a group of tools that are used as the build systemin many open source projects. The components:
I GNU AutoconfI GNU AutomakeI GNU LibtoolI Gnulib
Packages that use Autotools come with a script named configurethat checks dependencies and generates makefiles.To configure, build, and install a package for the native operatingsystem
$ . / con f igu re$ make$ sudo make i n s t a l l

GUT – Intel 2015/16 34/34
For Further Reading I
C. Simmonds. Mastering Embedded Linux Programming.Packt Publishing, 201