emergence of coordination in growing decision-making
TRANSCRIPT

Research ArticleEmergence of Coordination in Growing Decision-MakingOrganizations The Role of Complexity Search Strategy andCost of Effort
Friederike Wall
University of Klagenfurt Department for Management Control and Strategic Management Universitatsstrasse 65-679020 Klagenfurt Austria
Correspondence should be addressed to Friederike Wall friederikewallaauat
Received 23 April 2019 Revised 23 August 2019 Accepted 19 October 2019 Published 6 December 2019
Guest Editor Marin Lujak
Copyright copy 2019 Friederike Wall is is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Coordination among decision-makers of an organization each responsible for a certain partition of an overall decision-problemis of crucial relevance with respect to the overall performance obtained Among the challenges of coordination in distributeddecision-making systems (DDMS) is to understand how environmental conditions like for example the complexity of thedecision-problem to be solved the problemrsquos predictability and its dynamics shape the adaptation of coordination mechanisms ese challenges apply to DDMS resided by human decision-makers like rms as well as to systems of articial agents as studied inthe domain of multiagent systems (MAS) It is well known that coordination for increasing decision-problems and accordinglygrowing organizations is in a particular tension between shaping the search for new solutions and setting appropriate constraintsto deal with increasing size and intraorganizational complexity Against this background the paper studies the adaptation ofcoordination in the course of growing decision-making organizations For this an agent-based simulation model based on theframework of NK tness landscapes is employed e study controls for dierent levels of complexity of the overall decision-problem dierent strategies of search for new solutions and dierent levels of cost of eort to implement new solutions eresults suggest that with respect to the emerging coordination mode complexity subtly interferes with the search strategyemployed and cost of eort In particular results support the conjecture that increasing complexity leads to more hierarchicalcoordination However the search strategy shapes the predominance of hierarchy in favor of granting more autonomy todecentralized decision-makers Moreover the study reveals that the cost of eort for implementing new solutions in conjunctionwith the search strategy may remarkably aect the emerging form of coordination is could explain dierences in prevailingcoordination modes across dierent branches or technologies or could explain the emergence of contextually inferior modesof coordination
1 Introduction
e coordination of decision-making among a set of agentswith each being responsible for a certain partition of anoverall decision-problem is a fundamental issue in thedesign of distributed decision-making systems (DDMS)mdashmay they be for example organizations like rms or teamsof robots (eg [1ndash6]) Coordination within DDMS is studiedin various domains of organizational thinking For examplea predominant issue in organization theory is mechanismsto manage interdependencies between activities within anorganization [7ndash9] in the domain of management control
the so-called Management Control Systems (MCS) areintended to ensure that decision-making is consistent withobjectives and strategies of a rm by employing a multitudeof mechanisms and techniques to coordinate managersrsquochoices [10ndash12] in the domain of multiagent systems forexample ldquoplan mergingrdquo in terms of integrating partial plansinto an overall plan is one of the issues discussed in thecontext of coordination (eg [5 13])
A common thoughmostly implicit idea in these schoolsof organizational thinking is however that there is a well-informed designer knowing the ldquotruerdquo nature of the overalldecision-problem and with this the coordination need as
HindawiComplexityVolume 2019 Article ID 4398620 26 pageshttpsdoiorg10115520194398620
affected by the problemrsquos complexity hence the designercan organize the DDMS accordingly However this as-sumption does not necessarily universally apply since thesystem may be newly set up or it may operate in an envi-ronment which has undergone an external shock In asimilar vein the underlying decision-problem does not needto keep its structure over time it may for example grow insize A firm may produce and sell additional products or anincreased geographical area may be provided with servicesby a (growing) fleet of unmanned aerial vehicles
In this line of thought for coordination theory inmultiagent systems (MAS) Lesser and Corkill [14] recentlyargue that among the issues so far underrepresented in MASresearch is to explicitly take into account environmentalconditions like for example the predictability of taskcharacteristics and the dynamic adaptation of coordinationwhen the environment or the problem to solve is evolvingdynamically
Against this background the research objective of thispaper is to study which types of coordination emerge inDDMS when the underlying decision-problem is not known inadvance and is subject to growth +e paper seeks to providesome answers to this research question while adopting theperspective of contingency theory ie assuming that theperformance of a system is shaped by the fit between itssituational context and its internal arrangements taking theparticular interrelation among complexity theory andcontingency theory ([15] pp 411) into account Based onthis understanding the research endeavor presented takesthree contingent factors into account
11 Complexity of the Decision-Problem Corresponding tothe seminal paper of Simon [16] the complexity of an overalldecision-problem and hence the need for coordination isshaped by the interactions among its components In casethe overall decision-problem is (nearly) decomposable itcan be separated into (nearly) disjoint sub-problems suchthat intra-sub-problem linkages are stronger than the inter-sub-problem interactions In consequence sub-problemscan be solved independent from each other without takingpositive or negative interactions with respect to the overallproblemrsquos solution into account In contrast if an overalldecision-problem is nondecomposable no decompositioninto sub-problems can be found that (nearly) diminishesinter-sub-problem interactions (eg [17 18]) Hence ifcomplexity in terms of interactions is high also the need forcoordination across the sub-problems is high when superiorsolutions to the overall decision-problem are pursued
12 Search Strategy +e strategies for finding new solutionsfor decision-problems have been studied in various domainsFor DDMS ldquoresidedrdquo by human decision-makers a corner-stone was set by Simon [19] who argues that in ldquosituations ofany complexityrdquo (pp 104) decision-makers are unable tosurvey the entire search space and hence cannot identify theoptimal solution of their decision-problem ldquoat oncerdquo ratherthey search stepwise for superior solutions following a sat-isfying approach In the domains of organizational search
and innovation the idea of stepwise search often is char-acterized by the extent of changes in terms of the distance ofthe newly found options compared to a status quo ieexplorative exploitative or ambidextrous strategies of search(eg [20 21]) Constraints regarding the allowed or enforcedextent of changes induced by alternative solutions are part ofthe boundary system in MCS +e boundary system setsbehavioral constraints to decision-makers and is regarded asa prerequisite for the delegation of decision-making [22ndash24]In growing organizations the boundary system is in aparticular tension between shaping the search for new op-portunities and innovation on the one hand and on the othersetting behavioral constraints to deal with increasing size andintraorganizational complexity [25 26]
13 Cost of Effort +e search strategy shapes the potentialextent of changes made compared to a status quo andchanges may come along with notable extra costs oftentermed ldquoswitching costrdquo or ldquocost of effortrdquo eg for cognitiveeffort or additional consumption of time or resources Forexample organizational changes may cause costs for re-organization and for handling resistance of certain stake-holders [27] choosing another supplier could result in costsfor technical conversions [28 29] changing the direction ofa robotrsquos movement in a multirobot system could cost someextra time [30ndash32] and altering the task assignment in thecourse of job scheduling may rise some extra costs of forexample learningmdashin case of humans as well as ldquoartificialrdquoagents [33 34] +e level of cost of effort therefore affectsthe propensity to implement an alternative to the status quoas identified according to the search strategy
+e paper employs an agent-based simulation model toldquogrowrdquo organizations from scratch and to observe whichmodesof coordination predominantly emerge for different settings ofthe aforementioned contingent factors Simulation appears anappropriate method since it allows to capture long-term andprocessual phenomena thatmdashdepending on the sub-jectmdashwould require rather challenging longitudinal studiesin empirical research (eg [35ndash37]) Simulation further helpsto analyze ldquoborderlinerdquo cases which could be hardly studiedin a sufficient number empirically in order to systematicallyexplore the effects of contingency the effects of contingencyfactors in interaction with each other [15] To capture and beable to control the complexity of a DDMSrsquos overall decisionproblem the study relies on the framework of NK fitnesslandscapes which was originally introduced in the domain ofevolutionary biology [38 39] and since then broadlyemployed in managerial science (for overviews see [21 37])In particular an agent-based simulation is employed inwhich growing organizationsmdashwith an increasing number ofdecentralized decision-makersmdashsearch for superior solu-tions to their task (specified according to the NK framework)and where the organizations may employ different searchstyles From time to time the organizations adapt theircoordination mode based on reinforcement learning
+e remainder of this paper is organized as followsSection 2 relates this paper to streams of prior researchSection 3 introduces a theoretical model of growing DDMS
2 Complexity
before in Section 4 the simulation experiments including theparameter settings are described Section 5 reports anddiscusses the results obtained from the simulations andSection 6 provides concluding remarks
2 Related Work
+e emergence of coordination is a key question in variousdomains and accordingly the related approaches in re-search are rather manifold For example complex systemsscience studies the emergence of ldquocollective intelligencerdquo (foran overview see [40]) as apparent in linguistic conventions[41] in economics it is examined how individuals learn tocoordinate in respect to collective objectives like in publicgood games (eg [42 43]) prominent issues of multiagentsystems are the self-adaptation of consensus mechanisms invariable networks or the convergence of consensus algo-rithms (for an overview see [44])
While these streams of research clearly are of generalrelevance for this research endeavor with respect to theresearch question posed in the Introduction the paperparticularly focuses on the emergence of coordination inDDMS which face decision-problems of increasing size bymeans of an agent-based simulation
Herewith the paper also relates to the two domains ofldquoagent-based computingrdquo as Niazi and Hussain [45] put it+e research question is predominantly directed to theunderstanding of emergent phenomena in the context ofcomplex decision-problems and thus it is related to thestream of research employing agent-based simulation as aresearch methodmdashoften termed as ldquosocial simulationrdquo [46]however the research question also relates to the domain ofmultiagent systems (MAS) with its primary design focus[45 47]
With this the paper particularly builds on three lines ofresearch which are outlined subsequently (1) coordinationand in particular constraint-setting mechanisms via MCSin growing organizations (2) agent-based simulation in thedomain of organizations and management control and (3)coordination of decision-making in MAS
21 Management Control Systems in Growing OrganizationsIn this line of research the empirical study of Davila [48] onthe emergence of management control systems (MCS) insmall growing organizations provides a cornerstoneaccording to which organizational size has a positive impacton the overall level of use of MCS A key argument is thatwhen organizations grow informal controls become toocostly andor ineffective and hence more formal controlsfor purposes of motivation and monitoring are employed asthey are captured in MCS As mentioned in the In-troduction the research endeavor of this paper addressescomplexity in terms of interactions among sub-problems ingrowing decision-problems However in this respect re-search findings on MCS are somewhat ambiguous Whilelow levels of interactions have been found to be linked tobudgets operating procedures and statistical reports thelatter combined with informal coordination were found to
be employed when complexity is high [49] Some findingsindicate that with higher levels of complexity more em-phasis is put on communication between subordinate andsuperior decision-makers and that aggregated and in-tegrative information becomes more important [50]Moreover it was argued that with higher levels of inter-sub-problem interactions the uncertainty derived from a lack ofcontrol over the supplying decision-makers increases andthis in turn may result in more formal controls while at thesame time increasing the need for flexibility resulting in anemphasis on informal controls [51] In a recent study [24] ahigh level of interdependencies was found to in tendency berelated to the establishment of vertical information flows forsolving coordination problems With respect to the searchstrategy (see Introduction) first of all it is worth mentioningthat MCS are intended to provide focus for the search fornovel solutions ie aligning them with the organization-wide strategic orientation [25] Constraining the decision-making scope via boundary systems (as subsystems of MCS)was found to be positively associated with performance ofexploitative innovations with their typically tightly coupledactivitiesmdashparticularly because risk is reduced that sub-ordinate decision-makers pursue activities which are not inline with established processes [26 52] In contrast in thelong run boundary systems are argued to reduce the pro-pensity of exploration in terms of experimentation [53]
22 Agent-Based Simulation in the Domain of Organizationsand Management Control Systems Several studies employagent-based modelingmdashfollowing the tradition of ldquosocialsimulationrdquomdashin the domain of organizations [54] and as inthis paper employ the NK-frameworkmdashwith its particularcapabilities of capturing the level of complexity of the de-cision-problem and of studying the effects of different searchstrategies for superior solutions at the level of the entireorganization (for overviews see [21 37 55 56]) For ex-ample the performance of different coordination mecha-nisms in turbulent and complex task environments isanalyzed by Siggelkow and Rivkin [57] the authors iden-tifymdashfor different levels of task complexitymdashorganizationalconfigurations which appear appropriate to cope with en-vironments undergoing some external shock eg whencomplexity and turbulence are at high levels ample co-ordinative power and strategies fostering broad searchprocesses turn out to perform best however the results alsosuggest that subtle interferences with distribution of de-cision-making authority in the organizations may affectoverall performance +ese results relate to prior researchwhich indicates on the subtle interaction between com-plexity and the appropriate organizational design namelyhierarchical coordination (eg [55 58 59]) Regarding thesearch strategy (see Introduction) not only experientialsearch (ie based on processes of local search) has beenstudied but also compared to for example forward-lookingsearch (capturing decision-makersrsquo potentially imprecisebeliefs about the actions-outcome-relations) [60] or ldquosearchrdquovia imitation [61] imitation turns out to be effective for theimitator particularly at intermediate levels of complexity
Complexity 3
while with high complexity of the decision-problem smallerrors in imitation can lead to severe deviations from theintended solutions and performance losses [62] With re-spect to cost of effort for implementing new solutions (seeIntroduction) prior research suggests on subtle interactionswith problem complexity On the one hand higher cost ofeffort makes changes less attractive and hence increase theperil of inertia which is a particular relevant aspect incomplex decision-problems on the other hand they maystabilize search and prevent frequent mutual (ldquohyperactiverdquo)adjustments within an organization [63 64]
23 Coordination of Decision-Making in Multiagent SystemsCoordination among agents is a key issue of multiagentsystems (MAS) and accordingly can build on a vast body ofprior research (for reviews see [3 6 65ndash67]) With respect tothe issues focused in this paper the unpredictability of theenvironment imperfect information about the environmentas well as the fellow agents behavior and imperfect com-munication are of particular interest For multiagent sys-tems a general theoretical specification of this kind ofproblem is given by the framework of decentralized partiallyobservable Markov decision processes (dec-POMDPs)[67 68] and overviews of the multitude of techniques forcoordinating distributed (or local) plans are given by[5 13 69] According to the recent survey of Torrentildeo et al[69] the multitude of multiagent planning can be classifiedaccording to six key features (1) agent distribution (in-volvement of multiple agents in formation andor executionof plans) (2) computational processes (centralized or splitamong several processing units) (3) plan synthesis schemes(ie how and when the coordination takes place) (4)communication mechanisms (which is highly related toaspects 2 and 3) (5) heuristic search processes and (6)privacy preservation (ie coordination of plans without thatsensitive information becomes publicly available)
Within this framework the research question studied inthis paper is mainly related to aspect 3 plan synthesis (ldquoplanmergingrdquo) +e formation of plans is at least partiallydistributed across agents and once each agent has formed aplan regarding its sub-problem the emerging modes ofwhether and if so how the local plans are synthesized intoan overall plan [2 13] are studied for different levels of theplanning problemrsquos complexity and search strategies (aspect5 as mentioned above)
In MAS two principle ways for plan synthesis are dis-tinguished unthreaded planning and coordination in termsof sequential activities [69] vs interleaved coordinationwhich implies an immediate integration of planning andcoordination [70] +is paper focuses on unthreadedplanning A general model of coordination of plansaccording to unthreaded planning was introduced byMartial [2] including negotiations among agents for reso-lution of conflicts In this paper synthesizing schemes likeconcatenation of distributed plans according to certain rules[71] or iterative response planning (ie sequential in-formation and adjustment) [72] are employed (for detailssee Section 34)
For coordination theory in MAS recently Lesser andCorkill [14] raised four challenges which they argue based onempirical observations so far are reflected in research to alesser extent Two of these challenges reflect key aspects ofthe research endeavor of this paper (see Introduction) Inparticular according to Lesser and Corkill [14] (in a similarvein [69])
(1) environmental conditions like for example pre-dictability of task characteristics shape which co-ordination strategies are appropriate
(2) the dynamic adaptation of coordination seemscrucial when the environment or the problem tosolve is evolving dynamically
Both aspects correspond to key issues of this researcheffort (see Introduction) the first since this paper adopts acontingency perspective on coordination taking differentlevels of complexity different types of search behavior anddifferent levels of cost of effort into account the second sincethe research question posed in this paper boils down towhich type of coordination emerges for evolving in terms ofgrowing decision-problems
3 A Theoretical Model of Distributed Decision-Making in Growing Organizations
+is part introduces a model of distributed decision-makingin organizations facing a decision-problem which growsover time reflected in organizational growth accordingly+e organizations learn about appropriate modes of co-ordination in terms of plan synthesis (Section 23) in thecourse of growth +e description of the model is structuredinto the following steps first the model of growing decision-problems is described (Section 31) next Section 32 in-troduces the two types of agents ldquoresidingrdquo in the organi-zations before Section 33 in particular goes into details ofthe distributed (or local) decision-making agents includingtheir respective sub-problems their search strategies andtheir formation of preferences+e different schemes of plansynthesis for coordination among distributed decision-makers captured in the model are described in Section 34before the organizationsrsquo learning about the appropriatemode of coordination is modeled (Section 35)
31 Decision-Problem Based on Growing NK FitnessLandscapes +e decision-problems to be solved by theartificial organizations are modeled according to theframework of NK-fitness landscapes A major feature of NKfitness landscapes is that they allow to easily control for thecomplexity of an N-dimensional decision-problem capturedby parameter K from a ldquotechnicalrdquo perspective NK land-scapes are stochastically generated pseudo-Boolean func-tions with N bits ie F 0 1 N⟶ R+ [73 74] for a briefdescription of NK landscapes as used in managerial science(see [75]) In line with the NK-framework at time step t theorganizations face an N-dimensional binary decisionproblem ie dt
rarr (d1t dNt) with dit isin 0 1
i 1 N out of 2N different binary vectors possible
4 Complexity
Each of the two states dit isin 0 1 provides a contribution Cit
to the overall performance V(dt
rarr) where the Cit are ran-
domly drawn from a uniform distribution with 0leCit le 1+e parameter K (with 0leKleN minus 1) reflects the number ofthose choices djt jne i which also affect the performancecontribution Cit of choice dit and thus captures thecomplexity of the decision problem to be solved in terms ofthe interactions among the single decisions Hence con-tribution Cit may not only depend on the single choice dit
but also on K other choices
Cit fi dit di1t diKt1113872 1113873 (1)
with i1 iK1113864 1113865 sub 1 i minus 1 i + 1 N In case of nointeractions among choices K equals 0 and K is N minus 1 forthe maximum level of complexity where each single choice iaffects the performance contribution of each other binarychoice jne i +e overall performance Vt achieved in period tresults as normalized sum of contributions Cit from
Vt V dt
rarr1113874 1113875
1N
1113944
N
i1Cit (2)
While this so far captures the key elements of theldquostandardrdquo NK framework a distinguishing feature of themodel presented in this study is thatmdashdue to growthmdashthenumber of single choices to be made by an organization mayincrease over time ie N(t) and with this also the level ofcomplexity may rise ie K(t) Figure 1(b) gives an examplereflecting in the first growth stage a rather small decision-problem with N1 6 and K1 3 in the second stage amedium-sized decision-problem with N2 9 and K2 4growing up to a size N3 12 and K3 5 in the third growthstage More formally we have
N(t)
N1 for 0le tle t1
⋮
Ns for tsminus 1 lt tle ts
⋮
NS for tSminus 1 lt tleT
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎩
(3)
where s (1 S) captures the growth stage and Tdenotesthe entire observation period Correspondingly Ks gives thelevel of complexity in the respective periods of time +eoverall performance (see equation (2)) herewith modifies to
Vt V dt
rarr1113874 1113875
1Ns
1113944
Ns
i1Cit (4)
With this the overall performance is ldquodynamicallyrdquo nor-malized to the problem size Ns moreover in the analysis of thesimulation results the final performance VT 750 is given inrelation to the global maxima of the respective performancelandscapes otherwise the results could not be compared overtime and across different performance landscapes
32Agents and8eirCapabilities Two types of agents residein the organizations
(1) +e distributed (or local) ldquodecision-making agentsrdquo(type 1) which are in primary responsibility of de-cision-making where each of these agents is in chargefor a distinct sub-problem of the overall (growing)decision-problem +ese agents could for examplereflect managers each being the head of a departmentin an organization
(2) Each organization has one central agent (type 2)mdashcapturing for example the headquarter of afirmmdashbeing responsible for
(a) learning-based selection of a mode of co-ordination in every TL-th period
(b) eventuallymdashie subject to the coordinationmode selectedmdashactively intervening in plansynthesis
(c) registering the performance achieved by eachdistributed decision-making agent (see above)and eventually rewarding it accordingly
As familiar in agent-based computational economics(eg [76 77]) the agents captured in the model show someform of bounded rationality [19] In particular both types ofagents ie distributed decision-making agents and head-quarter are assumed to decide on basis of bounded in-formation in terms of not knowing the entire search spaceand having limited computational power [78ndash80] Hencealthough distributed decision-makers are self-interestedpursuing their particular goals and in a similar vein thecentral agent seeks to maximize overall performance(equation (4)) the agents are not optimizers but conductstepwise search processes in terms of neighborhood searchMoreover the agents are not able to perfectly evaluate newlyfound options to their respective decision-problems
+e properties of the distributed decision-making agents(type 1) are described more precisely in Section 33 while thecentral agent (type 2) is depicted more in detail in Sections34 and 35
33 Distributed Decision-Making Agentsrsquo Search andFormation of Preferences
331 Decomposition and Delegation +e Ns-dimensionaldecision problem is partitioned into Ms disjoint partialproblems of for the sake of simplicity equal size Nr
s Each ofthese sub-problems is delegated to one distributed decision-maker r (ie one agent of type 1)mdashwith particular com-petencies of decision-maker r related to the respective sub-problem being subject to the mode of coordinationimplemented at that time However the distributed de-cision-makers are at least preparing choices regarding theirpartition of the overall Ns-dimensional decision-problem ineach period t (ie depicting ldquounthreaded planningrdquo fromMAS see Section 23)
+e growth processes in the problem space are reflectedin the number of distributed decision-makers (type 1) ac-cordingly More formally we have the number of distributeddecision-makers being a function of time ie Ms(t) and ateach given growth stage s the scope of competencies of the
Complexity 5
distributed decision-makers are of equal size in terms ofnumber of single choices Nr
s assigned to them (see forexample the shaded areas in Figure 1)
332 Search Strategies In the model as mentioned abovedistributed decision-makers are not able to survey the entiresearch space of their decision-problem and hence they arenot able to ldquolocaterdquo the optimal solution of their partialdecision problem ldquoat oncerdquo rather they search stepwise forsuperior solutions In each time step t distributed decision-
maker r considers two alternative solutions dra1t
rarrand d
ra2t
rarrfor
its partial decision-problem compared to the status quo drlowasttminus 1
rarr
With this in each of the search strategies modeled and inevery time step decision-maker r has three options to choosefrommdashincluding staying with the status quo
However the model captures thatmdashas a part of theboundary system in the MCSmdashsome boundaries related to
the distances of the two alternatives dra1t
rarrand d
ra2t
rarrcompared
to the status quo are set and enforced by the central unit(type 2 agent) In particular the boundary system enforcessearch strategies being of an exploitative explorative orambidextrous nature [20 58 81] and accordingly the modelcomprises the following three search strategies
(i) ldquoexploitation onlyrdquo both alternatives dra1t
rarrand d
ra2t
rarr
discovered by distributed decision-maker r differ from
the status quo drlowasttminus 1
rarrby one digit respectively Hence
the Hamming distance h(dra1
rarr) 1113936
Nr
i1|drlowasttminus 1
rarrminus d
ra1t
rarr|
of the first alternative to the status quo equals 1 as wellas is the case for the second alternative (ie
h(dra2
rarr) 1)
(ii) ldquoexploitation and explorationrdquo the local decision-makers are allowed to alternatively consider anoption with one bit flipped and another where two
1 2 3 4 5 6 1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8 9 10 11 121 X X X ndash ndash ndash 1 X X X ndash ndash ndash ndash ndash ndash 1 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash2 X X X ndash ndash ndash 2 X X X ndash ndash ndash ndash ndash ndash 2 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash3 X X X ndash ndash ndash 3 X X X ndash ndash ndash ndash ndash ndash 3 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash4 ndash ndash ndash X X X 4 ndash ndash ndash X X X ndash ndash ndash 4 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash5 ndash ndash ndash X X X 5 ndash ndash ndash X X X ndash ndash ndash 5 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash6 ndash ndash ndash X X X 6 ndash ndash ndash X X X ndash ndash ndash 6 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash
7 ndash ndash ndash ndash ndash ndash X X X 7 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash8 ndash ndash ndash ndash ndash ndash X X X 8 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash9 ndash ndash ndash ndash ndash ndash X X X 9 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash
10 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X11 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X12 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X
Choi
ce d
iD
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M D
Dec
M
Growth stage s = 1 (N1 = 6 K1 = 2 K1ex = 0)
Performance contribution Cj
Growth stage s = 2 (N2 = 9 K2 = 2 K2ex = 0)
Performance contribution Cj
Growth stage s = 3 (N3 = 12 K3 = 2 K3ex = 0)
Performance contribution Cj
Scope of primary control of distributed decision maker r (type 1 agent)X Choice i affects performance contribution jndash Choice i does not affect performance contribution j
Distributed decision maker (type 1 agent)DDecM
(a)
1 2 3 4 5 6 1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8 9 10 11 121 X X X ndash ndash X 1 X X X ndash ndash X X ndash ndash 1 X X X ndash ndash X X ndash ndash ndash ndash X2 X X X ndash X ndash 2 X X X ndash X ndash ndash X ndash 2 X X X ndash X ndash ndash X ndash ndash X ndash3 X X X X ndash ndash 3 X X X X ndash ndash ndash ndash ndash 3 X X X X ndash ndash ndash ndash ndash X ndash ndash4 X ndash ndash X X X 4 X ndash ndash X X X X ndash X 4 X ndash ndash X X X X ndash X ndash ndash X5 ndash X ndash X X X 5 ndash X ndash X X X ndash X ndash 5 ndash X ndash X X X ndash X ndash ndash X ndash6 ndash ndash X X X X 6 ndash ndash X X X X ndash ndash X 6 ndash ndash X X X X ndash ndash X X ndash ndash
7 ndash X ndash ndash ndash X X X X 7 ndash X ndash ndash ndash X X X X ndash ndash X8 ndash ndash X ndash X ndash X X X 8 ndash ndash X ndash X ndash X X X ndash X ndash9 X ndash ndash X ndash ndash X X X 9 X ndash ndash X ndash ndash X X X X ndash ndash
10 ndash X ndash X ndash ndash ndash X ndash X X X11 ndash ndash X ndash X ndash X ndash ndash X X X12 X ndash ndash ndash ndash X ndash ndash X X X X
Choi
ce d
iD
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M
Growth stage s = 1 (N1 = 6 K1 = 3 K1ex = 1)
Performance contribution Cj
Growth stage s = 2 (N2 = 9 K2 = 4 K2ex = 2)
Performance contribution Cj
Growth stage s = 3 (N3 = 12 K3 = 5 K3ex = 3)
Performance contribution Cj
Scope of primary control of distributed decision maker r (type 1 agent)X Choice i affects performance contribution jndash Choice i does not affect performance contribution j
Distributed decision maker (type 1 agent)DDecM
(b)
Figure 1 Interaction structures and growth stages in the simulation experiments (a) decomposable and (b) nondecomposable
6 Complexity
digits are altered ie the Hamming distances are
h(dra1
rarr) 1 and h(d
ra2rarr
) 2(iii) ldquoexploration onlyrdquo in each of both alternatives d
ra1t
rarr
and dra2t
rarr two bits are flipped compared to the status
quo drlowasttminus 1
rarr ie we have h(d
ra1rarr
) 2 and h(dra2
rarr) 2
333 Distributed Decision-Makersrsquo Objectives and Cost ofEffort Each local decision-maker r r 1 Ms pursuesits ldquoownrdquo objective (ie related to its respective sub-prob-lem) In particular each distributed decision-maker seeks to
identify that option drt
rarrout of d
rlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrwhich
promises the highest net performance Ar ie the highestdifference between partial performance Pr
tmdashresulting fromthe contributions Cit of those particular single choicesassigned to decision-maker rmdashand the related cost of efforts
for implementing drt
rarr
Art d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (5)
where the partial performance Prt (d
rt
rarr) of decision-maker rrsquos
contribution to overall performance Vt (see equation (4)) isgiven by
Prt d
rt
rarr1113874 1113875
1N
1113944
Nrs
i1+w
Cit (6)
with w 1113936rminus 1p1N
ps for rgt 1 and w 0 for r 1
In case of interactions across the sub-problems capturedby Kex
s gt 0 choices of decision-maker r might affect thecontribution of the other decision-makersrsquo qnep choices onqrsquos parochial performance and vice versa
In the model the number of single choices altered in
terms of the Hamming distance h(drlowasttminus 1
rarr d
rt
rarr) to the status quo
(ie the number of bits flipped) is regarded as the effort to betaken by decision-maker r in order to implement an optionWith this the possible range of effort is shaped by the searchstrategy as introduced in Section 332 the lower bound forthe effort in all three search strategies equals 0 for the case
that the status quo drlowasttminus 1
rarris chosen to be kept the upper bound
is 1 in the ldquoexploitation onlyrdquo and equals 2 in the ldquoexplo-ration onlyrdquo as well as in the ambidextrous strategy
For modeling the cost of effort as customary in eco-nomics (eg [82 83]) it is assumed that higher levels ofeffort are increasingly costly Hence for distributed de-cision-maker rrsquos cost of effort Zr we have Zr(h)prime gt 0 and
Zr(h)Prime gt 0 In particular the cost of effort Zr(drt
rarr) of de-
cision-maker r is modeled to be quadratically increasingwith the Hamming distance h to the status quo ie
Zrt d
rt
rarr1113874 1113875 z
rmiddot h d
rlowasttminus 1
rarr d
rt
rarr1113874 11138751113874 1113875
2 (7)
where zr is a cost coefficient For the sake of simplicity in thesimulation experiments the cost coefficient is the same for
every decision-makers r and does not change over time Forthis reason subsequently the index r indicating on a de-cision-maker r is skipped when addressing the cost co-efficient (considering decision-makers which areheterogeneous in respect to their cost functions (as it couldbe captured by different cost coefficients zr) would be anatural extension of the research effort presented here)
334 Evaluation of Options When evaluating their optionsthe decentralized decision-makers suffer from two types oflimited information First without eventual further com-munication prescribed by the coordination mechanism (seeSection 34) decision-maker r is not able to anticipate theother decision-makersrsquo qne r choices and thus assumes thatthey will stay with the status quo ie that they will opt for
dqlowasttminus 1
rarr(for this see also [84]) +is is particularly relevant in
case of inter-sub-problem interdependencies when otherlocal decision-makersrsquo actions may affect performance ofdecision-maker r
Second decentralized decision-makers are not able toperfectly ex-ante evaluate their newly discovered optionsrsquo
dra1t
rarrand d
ra2t
rarreffects on their partial performance Pr
t (drt
rarr)
(see equation (6)) Rather the ex-ante evaluation is afflictedwith some noise In particular for the sake of simplicity adecision-maker rrsquos perceived partial performance ( 1113957Pr) isdistorted by a relative error imputed to the true perfor-mance With this our local decision-makers search on noisypartial performance landscapes (for further types of errorssee [85]) +e error terms follow a Gaussian distributionN(0 σ) with expected value 0 and standard deviations σr forevery decision-maker r errors are assumed to be in-dependent from each other Hence the perceived perfor-mance 1113957Pr
t (dt
rarr) of distributed decision-maker r is given by
1113957Prt d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 + e
rd
rt
rarr1113874 1113875 (8)
and the objective function in equation (5) modifies to
1113958Art d
rt
rarr1113874 1113875 1113957Pr
t drt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (9)
With equation (8) each distributed decision-maker r has adistinct partial and distorted ldquoviewrdquo of the true fitnesslandscape each decision-maker r is exclusively in charge ofan ldquoownrdquo part of the entireN-dimensional decision-problemas it is shaped in the current growth stage and imperfectlyestimates the performance contributions of newly discov-ered options +us at a given growth stage the modelcaptures Ms + 1 heterogeneous (distorted) views of the truelandscape ie one view per local decision-makerr 1 Ms plus a headquartersrsquo perspective (for the lattersee Section 343)
However for the status quo option we assume that eachdecision-maker r remembers the performance obtainedfrom the last period and with this knows the actual per-formance Pr
tminus 1 of the status quo should it be implemented inperiod t again
Complexity 7
Based on the evaluation of options each decision-maker
r compiles a list Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 of preferences
where drp1t
rarrindicates the most preferred option out of
drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarr Correspondingly d
rp2t
rarrdenotes the
second-most and drp3t
rarrthe third-most preferred option
34CoordinationModes for SynthesizingPlans As a result ofthe search and (imperfect) evaluation of options so far eachdistributed decision-maker has an ordered list Lr
t of pref-erences which in terms of multiagent systems reflects theindividual [2] or local plan [69] +e next step within eachperiod t is to come to a decision on the organizationrsquos overallproblem dt
rarr ie to merge the decentralized decision-makersrsquo
preferences on drt
rarrcaptured in the Ms lists Lr
t into the overallconfiguration dt
rarr +is requires to employ a mode of co-
ordination for synthesizing the local plansmdashand the verycore of this paper is to study which mode emerges underwhich conditions of search strategy and cost of effort
As it was outlined in Section 2 a multitude of modes forsynthesizing local plans has been proposed in various do-mains Out of the numerous feasible mechanisms the modelcomprises three modes which could represent particularpronounced (for not to say ldquoextremerdquo) forms of co-ordination regarding
(i) (de-)centralization in terms of (locus of) authority(ii) direction of alignment ie lateral vs vertical(iii) parallelization vs sequencing of final decision re-
garding the local plans
In particular the three types of coordination captured inthe model (see Table 1) differ in the communicationchannels (the model assumes that communication in thecourse of coordination works perfectly for an investigationof the effects of unintended communications errors see[86]) the information employed in decision-making thelocus of final decision-making and in the end the tightnessof coordination provided (for an overview and furthermodes see eg [2 57 69 87 88])
341 Decentralized Mode +e highest level of autonomy isgranted to the Ms distributed decision-makers if each ofthem is allowed to choose its most preferred option +enthe overall organizational configuration dt
rarrresults from
dt
rarr d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr1113874 1113875 (10)
Hence for decision-maker rrsquos partial decision problemNr
s the option according to
drlowastt
rarr d
rp1t
rarrforallr isin 1 Ms1113864 1113865 (11)
is implemented Obviously this type of coordination doesnot require any form of communication between thedecentralized decision-makers or with the headquarter(central agent) +e headquarter does not intervene in de-cision-making directly and its role is limited to registering
the achieved performances Vt(dt
rarr) and Pr
t (drt
rarr) in the end of
each period t and eventually to reward the decentralizeddecision-makers accordingly
342 Sequential Mode +is mode captures the idea ofldquosequential planningrdquo +e distributed decision-makersmake their final choices sequentially with for the sake ofsimplicity the sequence being given by the index r of thedecision-makers In particular in time step t decision-makerr minus 1 informs decision-maker r with 1lt rleMs about thechoices made so far ie made by the ldquoprecedingrdquo decision-makers lt r Decision-maker rgt 1 re-evaluates its ldquoownrdquo
options drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrtaking these ldquopriorrdquo choices into
accountmdashpotentially resulting in an adjusted list of pref-
erences Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 and chooses d
rp1t
rarrwhich
here depends on drminus 1p1t
rarr ie is a function of the choices of
the preceding decision-makers Hence only decision-maker1 does not have to consider previous choices and the choiceof decision-maker r (1 Ms) is made according to
drlowastt
rarr
drp1t
rarr if r 1
drp1t
rarrd
rminus 1p1t
rarr1113874 1113875 if 1lt rleΜ
⎧⎪⎪⎨
⎪⎪⎩(12)
and with equation (12) the overall configuration is given by
dt
rarr d
Mlowastt
rarr+e headquarter (type 2 agent) does not intervene
in decision-making andmdashsimilar to the decentralizedmodemdashis confined to observing the performances achievedand eventually rewarding the decentralized decision-makers accordingly
343 Proposal Mode Each local decision-maker transfersits list Lr
t of preferences to the headquarter which compilesthe first preferences to a composite vector
dC
rarr (d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr) and then evaluates the
overall performance V(dC
rarr) (see equation (4)) that this
solution promisesHowever as with decentralized decision-makers in the
model it is assumed that the headquarter is not capable toperfectly ex-ante evaluate new options ie other solutionsthan the status quo (see Section 32) Rather similar to thelocal decision-makers the headquarter suffers from somerelative noise following a Gaussian distribution with ex-pected value 0 and standard deviations σcent resulting in a
perceived overall performance 1113957V(dC
rarr) +e headquarter
8 Complexity
decides in favor of the composite vector ie dt
rarr d
Crarr
if dC
rarr
promises the same or a higher performance as the status quodtminus 1rarr
ie if
1113957V dC
rarr1113888 1113889geV d
lowasttminus 1
rarr1113874 1113875 (13)
If the composite vector dC
rarrassembled from the local
decision-makersrsquo first preferences does not meet the con-dition in equation (13) the headquarter evaluates a vectorcomposed from the decentralized decision-makersrsquo secondpreferences according to equation (13) If this also does notat least promise the performance of the status quo then theorganization stays with the status quo ie then dt
rarr dtminus 1
rarr
35 Learning-Based Adaptation of Coordination +e verycore of this research endeavor is to study which modes ofcoordination emerge within growth processes of the artificialorganizations In order to capture some kind of self-adap-tation of coordination the model employs a simple mode ofreinforcement learning (for overviews see [89 90]) based onstatistical learning ie a generalized form of the BushndashMosteller model [91 92]
+is mode of learning is chosen for the following rea-sons In the vast multitude of forms of learning studied invarious domains (eg psychology economics and com-puter science) reinforcement learning is regarded to beamong the most basic forms of learning [92] It represents afundamental possible form of humansrsquo behavior but alsoprovides some basis for learning of artificial agents [90]mdashboth regarded as DDMS in this paper Moreover in thismodel as a form of experiential learning the mid-termedreinforcement learning on the coordination mode corre-sponds to the experiential type of short-termed adaptation[60] when the decision-making systems in every single time-step search for a superior solution compared to the statusquo However it would be a natural extension of the modelto let the DDMS employ other and in particular more
advanced forms of learning about which mode of co-ordination is appropriate within the stage of growth and forthe search strategy employed and the cost of effort
In the model reinforcement learning on coordination forsynthesizing local plans is represented in the following way Inthe end of each time step t the central agent (type 2 agent seeSection 32) receives information about the overall perfor-mance Vt according to equation (4) +is allows the centralagent in every TLth period to compute the performanceenhancements achieved within the last TL periods Moreoverin every TLth period the organizations can alter the type ofcoordination mode as introduced in Section 34 Hence ourDDMS face the mid-termed decision-problem which type ofcoordination mode ac(t) isin Ac (with |Ac| 3 see Section 34)to implement in the next TL periods Let p(ac t) denote theprobability of an alternative ac(t) to be chosen at time t (with0lep(ac t)le 1 and 1113936aacisinAc (p(ac t)) 1)
+e key idea of reinforcement learning is that theprobabilities of options are updated according to the positiveor negative stimuli resulting from these options In ourcontext whether the performance enhancement ΔVt ob-tained under the regime of a certain mode of coordinationac(t) in the previous TL periods is regarded positive ornegative depends on whether or not it at least equals anaspiration level v ΔVt of type ac(t) of coordination is de-fined as the relative performance enhancement achievedwithin the last TL periods of the adaptive walk ie
ΔVt Vt minus Vtminus TL
Vtminus TL
(14)
Hence the stimulus τ(t) is
τ(t) 1 if ΔVt ge v
minus 1 if ΔVt lt v1113896 (15)
+e probabilities of options ac isin Ac are updatedaccording to the following rule with λ (where 0le λle 1)giving the reinforcement strength [92]
Table 1 Overview of the modes of coordination in the model
Type of coordination modeDecentralized Sequential Proposal
Lateral communication No Yes NoVertical communication No No YesHeadquarter intervening No No YesRe-evaluation of local plans No Yes Yes
Information employed for finaldecisions
Expected parochialperformance
Expected parochial performancetaking predecessorrsquos choices into
account
Expected organization-wideaggregated performance
Locus of final decisions on localplans Decentralized Decentralized Centralized
Temporal order of final decisionson local plans In parallel Asynchronously (in sequence) Synchronously (ldquoat oncerdquo)
Final configurations for distributeddecision-makersrsquo sub-problems
First preferences
drp1t
rarrforallr isin 1 Ms1113864 1113865
First preferences subject topreceding decision-makersrsquo
choices ie drp1t
rarr(d
rminus 1p1t
rarr) for rgt 1
drp1t
rarrfor r 1
First (or second) preferences drp1t
rarr
[or drp2t
rarr] if 1113957V(d
Crarr
)geV(dtminus 1rarr
)
Complexity 9
p ac t + 1( 1113857 p a
c t( 1113857 + λ middot
1 minus p ac t( )( 1113857 if ac ac(t)and τ(t) 1
minus p ac t( ) if ac ac(t)and τ(t) minus 1
minus p ac t( ) if ac ne ac(t)and τ(t) 1
p ac t( ) middot p ac(t) t( )
1 minus p ac(t) t( ) if ac ne ac(t)and τ(t) minus 1
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(16)
After the probabilities are updated as given in equation(16) the ldquonextrdquo mode of coordination to be employed fromt + 1 to t + TL is determined at randommdashaccording to theupdated probabilities
4 Simulation Experiments ProcessualStructure Parameters and Analysis
+is section is intended to introduce the principle structureof the simulation experiments based on the theoreticalmodel as presented in the previous Section 3 For this firstSection 41 gives an overview of the principle processualstructure of the simulations before the parameters settingsare motivated (Section 42) and the metrics employed foranalysis of experiments are introduced (Section 43)
41 Process Overview of the Simulation Model Figure 2depicts the principle processual structure of the simula-tion model based on the theoretical model as introduced inthe previous Section 3 In particular the simulation in itscore is characterized by three loops capturing three temporalhorizons
In the short term in each time step t the artificial or-ganizations search for superior solutions of their Ns-di-mensional decision-problem where the overall problem issegmented into Ms sub-problems with each delegated to Ms
local decision-making agents accordingly (type 1 agents inSection 32) In the mid-term ie in each TLth time step thecentral unit (type 2 agent) evaluates the current mode ofcoordination learns from this evaluation via reinforcementand eventually chooses another mode of coordination forthe next TL periods In the long term in every TGth timestep the decision-problem grows by a fixed number Nr
s ofadditional single choices to be made and the number Ms ofdistributed decision-makers increases by 1 (for details seeSection 31)
42 Parameter Settings
421 Parameters Fixed for all Experiments In the simula-tion experimentsmdashparameter settings are listed inTable 2mdashorganizations are observed over T 750 periodswhere in every TL 10th period eventually the mode ofcoordination is switched (the observation period T and thelearning interval TL 10 were fixed based on pretests whichindicate that the results do not principally change when theorganizations are observed for a longer time the similar
holds for an extension of the learning interval (eg toTL 20) however shortening the learning period notablybelow 10 periods does not leave the different coordinationmodes ldquoenough timerdquo to unfold their particular potentialwith respect to the aspiration level)
In every TG 250th period the organizations undergo agrowth in problem space as well as in the number of dis-tributed decision-makers
(i) In their first growth stage the organizations face anNs1 6-dimensional overall decision-problemdecomposed into two sub-problems of equal size(ie Nr
s1 3forallr isin 1 2 ) assigned to two decision-makers (Ms1 2) accordingly
(ii) In the second growth stage (ie fromt 251 to 500) three additional binary choices areto be made by the organizations for which oneadditional local decision-maker is responsi-blemdashhence the organizations comprise 3 decen-tralized decision-makers ie Ms2 3
(iii) In the third stage the decision-problem grows bythree further binary choices and hence finally theorganizations deal with an Ns3 12-dimensionalproblem and a fourth decentralized decision-makercomes into play (Ms3 4)
+e simulations are run for a moderate level of noisecaptured by parameters σr and σcent relevant for the ex-anteevaluations of options by the local decision-makers and incase of the proposal mode the central agent respectively (seeSections 32 and 343) It is assumed that the information ofthe local decision-makersmdashonly related to their respectiveNr-dimensional sub-problemsmdashare more precise than theinformation of the central unit which is related to the entireNs-dimensional decision problem (ie σr lt σcent) +is isintended to capture differentiation and specialization [8 93]due to division of labor Some empirical evidence suggeststhat noise of about 10 of the true value in the domain ofmanagement control is at a reasonable range [94]
+e modes of coordination which the organizationschoose of are motivated and introduced in Section 34 +eorganizations employ the same initial mode of coordinationnamely the ldquodecentralizedrdquo mode +is ldquosetuprdquo procedure ischosen to make sure that the adaptive processes start from aldquodefinedrdquo initial configuration and without having thelearning processes overlaid by the strong performance en-hancements that are typically made in the very first periodsof the adaptive walks (notwithstanding further simulations
10 Complexity
have shown that the overlaying effects appear to be rathernegligible) However an intuitive ldquostoryrdquo behind this setupprocedure is that the organizations start in fact without any
particular mode of coordination ie the decentralizedmode(for example because they were newly founded) and keepthis until time t 10 in this period they ldquodiscoverrdquo the two
Yes
No
Yes No
Yes No
No
Yes
Decrease of propensities of current mode of coordination to be chosen for the next TL
periods (and increase of propensities of others)
Determination of mode of coordination implemented in the next TL periods according to updated propensities
Central agent evaluates performance enhancement achievedwith the current mode of coordination in the last TL periods
Time step t = 0 growth stage s = 1number of distributed decision-making agents MS=1 = 2
Generation of a performance landscape according to the interaction structureat the first growth stage
Random-driven determination of the initial configuration dt=0 of the overalldecision-problem
Extension of performance landscape according to the interaction structure at the ldquonewrdquo growth stage s increase of number of distributed decision-making
agents by 1 ie MS = MS + 1
t = t + 1
Growth stage s = s + 1
Each distributed decision-maker r discovers alternatives a1 and a2 to the statusquo of the partial problem which is delegated to this decision-maker r
and forms its preferences (local plans)
Overall configuration dt is determined from the local plans according to the current mode of coordination
Central agent determines performance Vt obtained with configuration dt
Increase of propensities of current mode ofcoordination to be chosen for the next TL periods
(and decrease of propensities of others)
t mod TL = 0
t mod TG = 0
Positive feedback
t gt T Stop
Start
Figure 2 Principle processual structure of the simulation model
Complexity 11
alternative modes and choose randomly one option ac isin Ac
out of the three options (ie |Ac| 3) where each mode hasthe same initial probability 1|Ac| +en in every TL 10thperiod probabilities are adjusted according to the perfor-mance enhancements +e parameters for learning corre-spond to a moderate strength of learning [95] On basis ofthe updated probabilities eventually a new coordinationmode is established
422 Contingency Factors Parameters Subject to Variationacross Experiments As argued in the Introduction thisresearch effort takes a contingency perspective and inparticular intends to study the interacting effects of (1)complexity of decision-problem (2) search strategy and (3)cost of effort Accordingly these three contingent factors aresubject to variation across simulation experiments (see alsothe lower part in Table 2)
(1) Complexity of Decision-Problem In line with the idea offactorial design of simulation experiments [96] the exper-iments distinguish between two different levels of
complexity of the decision problem to be solved by theorganizations which capture two rather pronounced cases
Based on the seminal work of Simon [16] on the ar-chitecture of complexity (near) decomposability as com-pared to nondecomposability is the key aspect in theunderstanding of complexity (see also Introduction)Against this background the simulations are run for agrowing decomposable and a growing nondecomposableinteraction structure where the principle ldquotyperdquo of com-plexity is kept over the growth stages Hence the growthprocesses simulated may capture some kind of organicgrowth [97ndash99] Figure 1 provides a graphical representationof interaction matrices of the growing decision-problemswhich could capture the following situations (in the sim-ulation experiments the number of decision-makers mirrorsthe growth of the decision-problem for avoiding interferencewith effects of varying size of decision-makersrsquo scope ofcompetency (for further references see [55 100 101]))
(i) ldquodecomposablerdquo (Figure 1(a)) +is type of organi-zation and growth relates to the idea of an organi-zation consisting of self-contained ldquosub-problemsrdquo
Table 2 Parameter settings
Parameter ValuestypesParameters fixed for all experiments (see Section 421)Observation period T 750Interval of learning TL 10Interval of growth stages TG 250Growth stages s 1 2 3
Number of choicesIn growth stage s 1 Ns1 6In growth stage s 2 Ns2 9In growth stage s 3 Ns3 12
Number Ms of distributed decision-makers
In growth stage s 1 M1 2 distributed
decision-makers with sub-problems d1
rarr (d1 d2 d3)
and d2
rarr (d4 d5 d6)
In growth stage s 2 M2 3 ie one additional
distributed decision-maker 3 with sub-problem d3
rarr
(d7 d8 d9)
In growth stage s 3 M3 4 ie one furtheradditional decision-maker 4 with sub-problem
d4
rarr (d10 d11 d12)
Precision of ex-ante evaluation Distributed decision-makers σr 005forallrCentral agent (headquarter) σcent 01
Modes of coordination ac isin Ac ldquodecentralized rdquo ldquosequential rdquo ldquoproposalrdquo1113864 1113865
Aspiration level v 0Learning strength λ 05Parameters subject to variation across experiments (see Section 422)
Complexity of decision problem ldquoDecomposablerdquo ldquonondecomposablerdquofor details of interaction structures see Figure 1
Search strategy
ldquoExploitation onlyrdquo h(dra1
rarr) 1 and h(d
ra2rarr
) 1
ldquoExploitation and explorationrdquo h(dra1
rarr) 1 and
h(dra2
rarr) 2
ldquoExploration onlyrdquo h(dra1
rarr) 2 and h(d
ra2rarr
) 2
Cost of effort (cost coefficient) Baseline scenarios z 0001Sensitivity analysis z isin 0 0003 0005 001 002
12 Complexity
or ldquounitsrdquo [7 8] which have intense intra-unit in-teractions but no cross-unit interactions In the be-ginning the organizationrsquos overall decision-problemis decomposable into 2 distinct sub-problems [17]which for example might be related to differentproducts without any interrelations between themFor the 2 products 2 business units are responsible Inthe course of the growth stages the organizationldquoaddsrdquo further products and business units corre-spondingly without interrelations among the ldquooldrdquoand ldquonewrdquo products and accordingly the units
(ii) ldquonondecomposablerdquo (example given in Figure 1(b))+is case of interactionsmay capture whatmdashaccordingto the prominent classification of +ompson [7]mdashiscalled reciprocal interdependencies In particular thisstructure could represent an organization with func-tional specialization showing the typical high level ofinterrelations between sub-problemsmdashand de-partments accordingly In the course of growth it maybe that the vertical integration is increased (egestablishing an inhouse production of certain in-termediate products or sales logistics)
(2) Search Strategy As described in Section 332 thedecentralized decision-makers employ one of three funda-mental search strategies which are intended to capture ex-ploitation exploration and an ambidextrous strategy [20] asenforced by the boundary systemmdasheach characterized by thenumber of options and the Hamming distances allowed Forexample if an exploration strategy is pursued with M3 4local decision-makers and N3 12 in the final growth stageat maximum 8 digits of the overall decision-problem couldbe flipped ie two-thirds of the configuration dt
rarrcould be
altered in one time step
(3) Cost of Effort While the search strategy shapes themaximum of binary choices that could be flipped the actualalterations are affected by the local decision-makersrsquo pref-erences together with the coordination mode employedAccording to equations (7) and (9) in Section 3 the dis-tributed decision-makersrsquo preferences are affected by thecost of effort and in particular by cost coefficient z
However in order to be clear and concise the simulationexperiments are conducted in two steps First to gain a basicunderstanding of the emergence of coordination in thebaseline scenarios the cost of effort is at a moderate levelz 0001 for all local decision-makers Second a sensitivityanalysis is conducted in whose course the cost of effort isvaried from costless effort (ie z 0) to higher levels of costof effort (ie zgt 0001) in order to analyze the effects of costof effort on the emergence of coordination
43 Metrics Employed for Analysis of Simulations In thebaseline scenarios with 2 interaction structures and 3 searchstrategies under investigation at a given level of cost of effort6 different scenarios of parameters are simulated For thesensitivity analysis 5 additional levels of cost of effort are
simulated which results in 30 further scenarios For each ofin sum the 36 scenarios 2500 simulations are run with 10runs on 250 performance landscapes
+e research question of this paper boils down to thequestion which coordination modes emerge predominantlyfor which contingencies in terms of complexity searchstrategy and cost of effort Hence for answering this questionthe key metric is the relative frequencies of the coordinationmodes in the end of the observation period t 750
Moreover the relative frequencies of coordinationmodes over observation time are depicted +is allows togain an understanding of how their relative shares evolve inthe course of growth and learning
As described in Section 35 the propensities to opt for theone or the other mode of coordination is shaped by theperformance gains achieved under the current mode in thelast TL periods Hence the level of performance according toequations (2) and (4) respectively in Section 31 ie the finalperformance achieved at the end of the observation period forthe different coordination modes is of interest For this the2500 simulations for each scenario were grouped accordingto that mode of coordination which was ldquoactiverdquo (ie hasemerged) in the last period t 750 of the observation time
+ese subgroups were analyzed individually and inparticular the mean of the final performance Vt750 achievedfor each coordination mode selected at t 750 is computed aswell as the respective confidence interval at a 999 level ofconfidence
Moreover another metric informing about the effec-tiveness of the search processes is the relative frequency of theglobal maximum found in t 750 of the respective per-formance landscape which is computed for each subgroup(based on the coordination mode in t 750) separately
In order to gain some deeper understanding of the searchprocesses conducted by the DDMS two further metrics wereobserved and analyzed for each subgroup the ratio of periods inwhich the status quo is altered and the ratio of periods with false-positive alterations ie alterations in favor of a false-positiveoption (ie reducing Vt) to the T 750 periods of observation+ese metrics put some focus on the efficiency of search
5 Results and Discussion
+e results are presented in two steps First for gaining a basicunderstanding of the effects of intraorganizational complexityand search strategy on the emergence of coordination thebaseline scenarios are presented and analyzed (Section 51)While in the baseline scenarios the distributed decision-makers operate at a rather moderate though nonzero level ofcost of effort the sensitivity analysis (Section 52) illustrates theeffect of cost of effort at the local decision-makersrsquo side on thecoordination mode emerging at the systemrsquos level
51 Complexity and Search Strategy Baseline Scenarios
511 Overview For the baseline scenarios Table 3 displayscondensed results obtained from the simulation experimentsaccording to the metrics introduced in Section 43 In ad-dition Table 4 reports on the significances of mean
Complexity 13
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

affected by the problemrsquos complexity hence the designercan organize the DDMS accordingly However this as-sumption does not necessarily universally apply since thesystem may be newly set up or it may operate in an envi-ronment which has undergone an external shock In asimilar vein the underlying decision-problem does not needto keep its structure over time it may for example grow insize A firm may produce and sell additional products or anincreased geographical area may be provided with servicesby a (growing) fleet of unmanned aerial vehicles
In this line of thought for coordination theory inmultiagent systems (MAS) Lesser and Corkill [14] recentlyargue that among the issues so far underrepresented in MASresearch is to explicitly take into account environmentalconditions like for example the predictability of taskcharacteristics and the dynamic adaptation of coordinationwhen the environment or the problem to solve is evolvingdynamically
Against this background the research objective of thispaper is to study which types of coordination emerge inDDMS when the underlying decision-problem is not known inadvance and is subject to growth +e paper seeks to providesome answers to this research question while adopting theperspective of contingency theory ie assuming that theperformance of a system is shaped by the fit between itssituational context and its internal arrangements taking theparticular interrelation among complexity theory andcontingency theory ([15] pp 411) into account Based onthis understanding the research endeavor presented takesthree contingent factors into account
11 Complexity of the Decision-Problem Corresponding tothe seminal paper of Simon [16] the complexity of an overalldecision-problem and hence the need for coordination isshaped by the interactions among its components In casethe overall decision-problem is (nearly) decomposable itcan be separated into (nearly) disjoint sub-problems suchthat intra-sub-problem linkages are stronger than the inter-sub-problem interactions In consequence sub-problemscan be solved independent from each other without takingpositive or negative interactions with respect to the overallproblemrsquos solution into account In contrast if an overalldecision-problem is nondecomposable no decompositioninto sub-problems can be found that (nearly) diminishesinter-sub-problem interactions (eg [17 18]) Hence ifcomplexity in terms of interactions is high also the need forcoordination across the sub-problems is high when superiorsolutions to the overall decision-problem are pursued
12 Search Strategy +e strategies for finding new solutionsfor decision-problems have been studied in various domainsFor DDMS ldquoresidedrdquo by human decision-makers a corner-stone was set by Simon [19] who argues that in ldquosituations ofany complexityrdquo (pp 104) decision-makers are unable tosurvey the entire search space and hence cannot identify theoptimal solution of their decision-problem ldquoat oncerdquo ratherthey search stepwise for superior solutions following a sat-isfying approach In the domains of organizational search
and innovation the idea of stepwise search often is char-acterized by the extent of changes in terms of the distance ofthe newly found options compared to a status quo ieexplorative exploitative or ambidextrous strategies of search(eg [20 21]) Constraints regarding the allowed or enforcedextent of changes induced by alternative solutions are part ofthe boundary system in MCS +e boundary system setsbehavioral constraints to decision-makers and is regarded asa prerequisite for the delegation of decision-making [22ndash24]In growing organizations the boundary system is in aparticular tension between shaping the search for new op-portunities and innovation on the one hand and on the othersetting behavioral constraints to deal with increasing size andintraorganizational complexity [25 26]
13 Cost of Effort +e search strategy shapes the potentialextent of changes made compared to a status quo andchanges may come along with notable extra costs oftentermed ldquoswitching costrdquo or ldquocost of effortrdquo eg for cognitiveeffort or additional consumption of time or resources Forexample organizational changes may cause costs for re-organization and for handling resistance of certain stake-holders [27] choosing another supplier could result in costsfor technical conversions [28 29] changing the direction ofa robotrsquos movement in a multirobot system could cost someextra time [30ndash32] and altering the task assignment in thecourse of job scheduling may rise some extra costs of forexample learningmdashin case of humans as well as ldquoartificialrdquoagents [33 34] +e level of cost of effort therefore affectsthe propensity to implement an alternative to the status quoas identified according to the search strategy
+e paper employs an agent-based simulation model toldquogrowrdquo organizations from scratch and to observe whichmodesof coordination predominantly emerge for different settings ofthe aforementioned contingent factors Simulation appears anappropriate method since it allows to capture long-term andprocessual phenomena thatmdashdepending on the sub-jectmdashwould require rather challenging longitudinal studiesin empirical research (eg [35ndash37]) Simulation further helpsto analyze ldquoborderlinerdquo cases which could be hardly studiedin a sufficient number empirically in order to systematicallyexplore the effects of contingency the effects of contingencyfactors in interaction with each other [15] To capture and beable to control the complexity of a DDMSrsquos overall decisionproblem the study relies on the framework of NK fitnesslandscapes which was originally introduced in the domain ofevolutionary biology [38 39] and since then broadlyemployed in managerial science (for overviews see [21 37])In particular an agent-based simulation is employed inwhich growing organizationsmdashwith an increasing number ofdecentralized decision-makersmdashsearch for superior solu-tions to their task (specified according to the NK framework)and where the organizations may employ different searchstyles From time to time the organizations adapt theircoordination mode based on reinforcement learning
+e remainder of this paper is organized as followsSection 2 relates this paper to streams of prior researchSection 3 introduces a theoretical model of growing DDMS
2 Complexity
before in Section 4 the simulation experiments including theparameter settings are described Section 5 reports anddiscusses the results obtained from the simulations andSection 6 provides concluding remarks
2 Related Work
+e emergence of coordination is a key question in variousdomains and accordingly the related approaches in re-search are rather manifold For example complex systemsscience studies the emergence of ldquocollective intelligencerdquo (foran overview see [40]) as apparent in linguistic conventions[41] in economics it is examined how individuals learn tocoordinate in respect to collective objectives like in publicgood games (eg [42 43]) prominent issues of multiagentsystems are the self-adaptation of consensus mechanisms invariable networks or the convergence of consensus algo-rithms (for an overview see [44])
While these streams of research clearly are of generalrelevance for this research endeavor with respect to theresearch question posed in the Introduction the paperparticularly focuses on the emergence of coordination inDDMS which face decision-problems of increasing size bymeans of an agent-based simulation
Herewith the paper also relates to the two domains ofldquoagent-based computingrdquo as Niazi and Hussain [45] put it+e research question is predominantly directed to theunderstanding of emergent phenomena in the context ofcomplex decision-problems and thus it is related to thestream of research employing agent-based simulation as aresearch methodmdashoften termed as ldquosocial simulationrdquo [46]however the research question also relates to the domain ofmultiagent systems (MAS) with its primary design focus[45 47]
With this the paper particularly builds on three lines ofresearch which are outlined subsequently (1) coordinationand in particular constraint-setting mechanisms via MCSin growing organizations (2) agent-based simulation in thedomain of organizations and management control and (3)coordination of decision-making in MAS
21 Management Control Systems in Growing OrganizationsIn this line of research the empirical study of Davila [48] onthe emergence of management control systems (MCS) insmall growing organizations provides a cornerstoneaccording to which organizational size has a positive impacton the overall level of use of MCS A key argument is thatwhen organizations grow informal controls become toocostly andor ineffective and hence more formal controlsfor purposes of motivation and monitoring are employed asthey are captured in MCS As mentioned in the In-troduction the research endeavor of this paper addressescomplexity in terms of interactions among sub-problems ingrowing decision-problems However in this respect re-search findings on MCS are somewhat ambiguous Whilelow levels of interactions have been found to be linked tobudgets operating procedures and statistical reports thelatter combined with informal coordination were found to
be employed when complexity is high [49] Some findingsindicate that with higher levels of complexity more em-phasis is put on communication between subordinate andsuperior decision-makers and that aggregated and in-tegrative information becomes more important [50]Moreover it was argued that with higher levels of inter-sub-problem interactions the uncertainty derived from a lack ofcontrol over the supplying decision-makers increases andthis in turn may result in more formal controls while at thesame time increasing the need for flexibility resulting in anemphasis on informal controls [51] In a recent study [24] ahigh level of interdependencies was found to in tendency berelated to the establishment of vertical information flows forsolving coordination problems With respect to the searchstrategy (see Introduction) first of all it is worth mentioningthat MCS are intended to provide focus for the search fornovel solutions ie aligning them with the organization-wide strategic orientation [25] Constraining the decision-making scope via boundary systems (as subsystems of MCS)was found to be positively associated with performance ofexploitative innovations with their typically tightly coupledactivitiesmdashparticularly because risk is reduced that sub-ordinate decision-makers pursue activities which are not inline with established processes [26 52] In contrast in thelong run boundary systems are argued to reduce the pro-pensity of exploration in terms of experimentation [53]
22 Agent-Based Simulation in the Domain of Organizationsand Management Control Systems Several studies employagent-based modelingmdashfollowing the tradition of ldquosocialsimulationrdquomdashin the domain of organizations [54] and as inthis paper employ the NK-frameworkmdashwith its particularcapabilities of capturing the level of complexity of the de-cision-problem and of studying the effects of different searchstrategies for superior solutions at the level of the entireorganization (for overviews see [21 37 55 56]) For ex-ample the performance of different coordination mecha-nisms in turbulent and complex task environments isanalyzed by Siggelkow and Rivkin [57] the authors iden-tifymdashfor different levels of task complexitymdashorganizationalconfigurations which appear appropriate to cope with en-vironments undergoing some external shock eg whencomplexity and turbulence are at high levels ample co-ordinative power and strategies fostering broad searchprocesses turn out to perform best however the results alsosuggest that subtle interferences with distribution of de-cision-making authority in the organizations may affectoverall performance +ese results relate to prior researchwhich indicates on the subtle interaction between com-plexity and the appropriate organizational design namelyhierarchical coordination (eg [55 58 59]) Regarding thesearch strategy (see Introduction) not only experientialsearch (ie based on processes of local search) has beenstudied but also compared to for example forward-lookingsearch (capturing decision-makersrsquo potentially imprecisebeliefs about the actions-outcome-relations) [60] or ldquosearchrdquovia imitation [61] imitation turns out to be effective for theimitator particularly at intermediate levels of complexity
Complexity 3
while with high complexity of the decision-problem smallerrors in imitation can lead to severe deviations from theintended solutions and performance losses [62] With re-spect to cost of effort for implementing new solutions (seeIntroduction) prior research suggests on subtle interactionswith problem complexity On the one hand higher cost ofeffort makes changes less attractive and hence increase theperil of inertia which is a particular relevant aspect incomplex decision-problems on the other hand they maystabilize search and prevent frequent mutual (ldquohyperactiverdquo)adjustments within an organization [63 64]
23 Coordination of Decision-Making in Multiagent SystemsCoordination among agents is a key issue of multiagentsystems (MAS) and accordingly can build on a vast body ofprior research (for reviews see [3 6 65ndash67]) With respect tothe issues focused in this paper the unpredictability of theenvironment imperfect information about the environmentas well as the fellow agents behavior and imperfect com-munication are of particular interest For multiagent sys-tems a general theoretical specification of this kind ofproblem is given by the framework of decentralized partiallyobservable Markov decision processes (dec-POMDPs)[67 68] and overviews of the multitude of techniques forcoordinating distributed (or local) plans are given by[5 13 69] According to the recent survey of Torrentildeo et al[69] the multitude of multiagent planning can be classifiedaccording to six key features (1) agent distribution (in-volvement of multiple agents in formation andor executionof plans) (2) computational processes (centralized or splitamong several processing units) (3) plan synthesis schemes(ie how and when the coordination takes place) (4)communication mechanisms (which is highly related toaspects 2 and 3) (5) heuristic search processes and (6)privacy preservation (ie coordination of plans without thatsensitive information becomes publicly available)
Within this framework the research question studied inthis paper is mainly related to aspect 3 plan synthesis (ldquoplanmergingrdquo) +e formation of plans is at least partiallydistributed across agents and once each agent has formed aplan regarding its sub-problem the emerging modes ofwhether and if so how the local plans are synthesized intoan overall plan [2 13] are studied for different levels of theplanning problemrsquos complexity and search strategies (aspect5 as mentioned above)
In MAS two principle ways for plan synthesis are dis-tinguished unthreaded planning and coordination in termsof sequential activities [69] vs interleaved coordinationwhich implies an immediate integration of planning andcoordination [70] +is paper focuses on unthreadedplanning A general model of coordination of plansaccording to unthreaded planning was introduced byMartial [2] including negotiations among agents for reso-lution of conflicts In this paper synthesizing schemes likeconcatenation of distributed plans according to certain rules[71] or iterative response planning (ie sequential in-formation and adjustment) [72] are employed (for detailssee Section 34)
For coordination theory in MAS recently Lesser andCorkill [14] raised four challenges which they argue based onempirical observations so far are reflected in research to alesser extent Two of these challenges reflect key aspects ofthe research endeavor of this paper (see Introduction) Inparticular according to Lesser and Corkill [14] (in a similarvein [69])
(1) environmental conditions like for example pre-dictability of task characteristics shape which co-ordination strategies are appropriate
(2) the dynamic adaptation of coordination seemscrucial when the environment or the problem tosolve is evolving dynamically
Both aspects correspond to key issues of this researcheffort (see Introduction) the first since this paper adopts acontingency perspective on coordination taking differentlevels of complexity different types of search behavior anddifferent levels of cost of effort into account the second sincethe research question posed in this paper boils down towhich type of coordination emerges for evolving in terms ofgrowing decision-problems
3 A Theoretical Model of Distributed Decision-Making in Growing Organizations
+is part introduces a model of distributed decision-makingin organizations facing a decision-problem which growsover time reflected in organizational growth accordingly+e organizations learn about appropriate modes of co-ordination in terms of plan synthesis (Section 23) in thecourse of growth +e description of the model is structuredinto the following steps first the model of growing decision-problems is described (Section 31) next Section 32 in-troduces the two types of agents ldquoresidingrdquo in the organi-zations before Section 33 in particular goes into details ofthe distributed (or local) decision-making agents includingtheir respective sub-problems their search strategies andtheir formation of preferences+e different schemes of plansynthesis for coordination among distributed decision-makers captured in the model are described in Section 34before the organizationsrsquo learning about the appropriatemode of coordination is modeled (Section 35)
31 Decision-Problem Based on Growing NK FitnessLandscapes +e decision-problems to be solved by theartificial organizations are modeled according to theframework of NK-fitness landscapes A major feature of NKfitness landscapes is that they allow to easily control for thecomplexity of an N-dimensional decision-problem capturedby parameter K from a ldquotechnicalrdquo perspective NK land-scapes are stochastically generated pseudo-Boolean func-tions with N bits ie F 0 1 N⟶ R+ [73 74] for a briefdescription of NK landscapes as used in managerial science(see [75]) In line with the NK-framework at time step t theorganizations face an N-dimensional binary decisionproblem ie dt
rarr (d1t dNt) with dit isin 0 1
i 1 N out of 2N different binary vectors possible
4 Complexity
Each of the two states dit isin 0 1 provides a contribution Cit
to the overall performance V(dt
rarr) where the Cit are ran-
domly drawn from a uniform distribution with 0leCit le 1+e parameter K (with 0leKleN minus 1) reflects the number ofthose choices djt jne i which also affect the performancecontribution Cit of choice dit and thus captures thecomplexity of the decision problem to be solved in terms ofthe interactions among the single decisions Hence con-tribution Cit may not only depend on the single choice dit
but also on K other choices
Cit fi dit di1t diKt1113872 1113873 (1)
with i1 iK1113864 1113865 sub 1 i minus 1 i + 1 N In case of nointeractions among choices K equals 0 and K is N minus 1 forthe maximum level of complexity where each single choice iaffects the performance contribution of each other binarychoice jne i +e overall performance Vt achieved in period tresults as normalized sum of contributions Cit from
Vt V dt
rarr1113874 1113875
1N
1113944
N
i1Cit (2)
While this so far captures the key elements of theldquostandardrdquo NK framework a distinguishing feature of themodel presented in this study is thatmdashdue to growthmdashthenumber of single choices to be made by an organization mayincrease over time ie N(t) and with this also the level ofcomplexity may rise ie K(t) Figure 1(b) gives an examplereflecting in the first growth stage a rather small decision-problem with N1 6 and K1 3 in the second stage amedium-sized decision-problem with N2 9 and K2 4growing up to a size N3 12 and K3 5 in the third growthstage More formally we have
N(t)
N1 for 0le tle t1
⋮
Ns for tsminus 1 lt tle ts
⋮
NS for tSminus 1 lt tleT
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎩
(3)
where s (1 S) captures the growth stage and Tdenotesthe entire observation period Correspondingly Ks gives thelevel of complexity in the respective periods of time +eoverall performance (see equation (2)) herewith modifies to
Vt V dt
rarr1113874 1113875
1Ns
1113944
Ns
i1Cit (4)
With this the overall performance is ldquodynamicallyrdquo nor-malized to the problem size Ns moreover in the analysis of thesimulation results the final performance VT 750 is given inrelation to the global maxima of the respective performancelandscapes otherwise the results could not be compared overtime and across different performance landscapes
32Agents and8eirCapabilities Two types of agents residein the organizations
(1) +e distributed (or local) ldquodecision-making agentsrdquo(type 1) which are in primary responsibility of de-cision-making where each of these agents is in chargefor a distinct sub-problem of the overall (growing)decision-problem +ese agents could for examplereflect managers each being the head of a departmentin an organization
(2) Each organization has one central agent (type 2)mdashcapturing for example the headquarter of afirmmdashbeing responsible for
(a) learning-based selection of a mode of co-ordination in every TL-th period
(b) eventuallymdashie subject to the coordinationmode selectedmdashactively intervening in plansynthesis
(c) registering the performance achieved by eachdistributed decision-making agent (see above)and eventually rewarding it accordingly
As familiar in agent-based computational economics(eg [76 77]) the agents captured in the model show someform of bounded rationality [19] In particular both types ofagents ie distributed decision-making agents and head-quarter are assumed to decide on basis of bounded in-formation in terms of not knowing the entire search spaceand having limited computational power [78ndash80] Hencealthough distributed decision-makers are self-interestedpursuing their particular goals and in a similar vein thecentral agent seeks to maximize overall performance(equation (4)) the agents are not optimizers but conductstepwise search processes in terms of neighborhood searchMoreover the agents are not able to perfectly evaluate newlyfound options to their respective decision-problems
+e properties of the distributed decision-making agents(type 1) are described more precisely in Section 33 while thecentral agent (type 2) is depicted more in detail in Sections34 and 35
33 Distributed Decision-Making Agentsrsquo Search andFormation of Preferences
331 Decomposition and Delegation +e Ns-dimensionaldecision problem is partitioned into Ms disjoint partialproblems of for the sake of simplicity equal size Nr
s Each ofthese sub-problems is delegated to one distributed decision-maker r (ie one agent of type 1)mdashwith particular com-petencies of decision-maker r related to the respective sub-problem being subject to the mode of coordinationimplemented at that time However the distributed de-cision-makers are at least preparing choices regarding theirpartition of the overall Ns-dimensional decision-problem ineach period t (ie depicting ldquounthreaded planningrdquo fromMAS see Section 23)
+e growth processes in the problem space are reflectedin the number of distributed decision-makers (type 1) ac-cordingly More formally we have the number of distributeddecision-makers being a function of time ie Ms(t) and ateach given growth stage s the scope of competencies of the
Complexity 5
distributed decision-makers are of equal size in terms ofnumber of single choices Nr
s assigned to them (see forexample the shaded areas in Figure 1)
332 Search Strategies In the model as mentioned abovedistributed decision-makers are not able to survey the entiresearch space of their decision-problem and hence they arenot able to ldquolocaterdquo the optimal solution of their partialdecision problem ldquoat oncerdquo rather they search stepwise forsuperior solutions In each time step t distributed decision-
maker r considers two alternative solutions dra1t
rarrand d
ra2t
rarrfor
its partial decision-problem compared to the status quo drlowasttminus 1
rarr
With this in each of the search strategies modeled and inevery time step decision-maker r has three options to choosefrommdashincluding staying with the status quo
However the model captures thatmdashas a part of theboundary system in the MCSmdashsome boundaries related to
the distances of the two alternatives dra1t
rarrand d
ra2t
rarrcompared
to the status quo are set and enforced by the central unit(type 2 agent) In particular the boundary system enforcessearch strategies being of an exploitative explorative orambidextrous nature [20 58 81] and accordingly the modelcomprises the following three search strategies
(i) ldquoexploitation onlyrdquo both alternatives dra1t
rarrand d
ra2t
rarr
discovered by distributed decision-maker r differ from
the status quo drlowasttminus 1
rarrby one digit respectively Hence
the Hamming distance h(dra1
rarr) 1113936
Nr
i1|drlowasttminus 1
rarrminus d
ra1t
rarr|
of the first alternative to the status quo equals 1 as wellas is the case for the second alternative (ie
h(dra2
rarr) 1)
(ii) ldquoexploitation and explorationrdquo the local decision-makers are allowed to alternatively consider anoption with one bit flipped and another where two
1 2 3 4 5 6 1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8 9 10 11 121 X X X ndash ndash ndash 1 X X X ndash ndash ndash ndash ndash ndash 1 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash2 X X X ndash ndash ndash 2 X X X ndash ndash ndash ndash ndash ndash 2 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash3 X X X ndash ndash ndash 3 X X X ndash ndash ndash ndash ndash ndash 3 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash4 ndash ndash ndash X X X 4 ndash ndash ndash X X X ndash ndash ndash 4 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash5 ndash ndash ndash X X X 5 ndash ndash ndash X X X ndash ndash ndash 5 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash6 ndash ndash ndash X X X 6 ndash ndash ndash X X X ndash ndash ndash 6 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash
7 ndash ndash ndash ndash ndash ndash X X X 7 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash8 ndash ndash ndash ndash ndash ndash X X X 8 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash9 ndash ndash ndash ndash ndash ndash X X X 9 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash
10 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X11 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X12 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X
Choi
ce d
iD
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M D
Dec
M
Growth stage s = 1 (N1 = 6 K1 = 2 K1ex = 0)
Performance contribution Cj
Growth stage s = 2 (N2 = 9 K2 = 2 K2ex = 0)
Performance contribution Cj
Growth stage s = 3 (N3 = 12 K3 = 2 K3ex = 0)
Performance contribution Cj
Scope of primary control of distributed decision maker r (type 1 agent)X Choice i affects performance contribution jndash Choice i does not affect performance contribution j
Distributed decision maker (type 1 agent)DDecM
(a)
1 2 3 4 5 6 1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8 9 10 11 121 X X X ndash ndash X 1 X X X ndash ndash X X ndash ndash 1 X X X ndash ndash X X ndash ndash ndash ndash X2 X X X ndash X ndash 2 X X X ndash X ndash ndash X ndash 2 X X X ndash X ndash ndash X ndash ndash X ndash3 X X X X ndash ndash 3 X X X X ndash ndash ndash ndash ndash 3 X X X X ndash ndash ndash ndash ndash X ndash ndash4 X ndash ndash X X X 4 X ndash ndash X X X X ndash X 4 X ndash ndash X X X X ndash X ndash ndash X5 ndash X ndash X X X 5 ndash X ndash X X X ndash X ndash 5 ndash X ndash X X X ndash X ndash ndash X ndash6 ndash ndash X X X X 6 ndash ndash X X X X ndash ndash X 6 ndash ndash X X X X ndash ndash X X ndash ndash
7 ndash X ndash ndash ndash X X X X 7 ndash X ndash ndash ndash X X X X ndash ndash X8 ndash ndash X ndash X ndash X X X 8 ndash ndash X ndash X ndash X X X ndash X ndash9 X ndash ndash X ndash ndash X X X 9 X ndash ndash X ndash ndash X X X X ndash ndash
10 ndash X ndash X ndash ndash ndash X ndash X X X11 ndash ndash X ndash X ndash X ndash ndash X X X12 X ndash ndash ndash ndash X ndash ndash X X X X
Choi
ce d
iD
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M
Growth stage s = 1 (N1 = 6 K1 = 3 K1ex = 1)
Performance contribution Cj
Growth stage s = 2 (N2 = 9 K2 = 4 K2ex = 2)
Performance contribution Cj
Growth stage s = 3 (N3 = 12 K3 = 5 K3ex = 3)
Performance contribution Cj
Scope of primary control of distributed decision maker r (type 1 agent)X Choice i affects performance contribution jndash Choice i does not affect performance contribution j
Distributed decision maker (type 1 agent)DDecM
(b)
Figure 1 Interaction structures and growth stages in the simulation experiments (a) decomposable and (b) nondecomposable
6 Complexity
digits are altered ie the Hamming distances are
h(dra1
rarr) 1 and h(d
ra2rarr
) 2(iii) ldquoexploration onlyrdquo in each of both alternatives d
ra1t
rarr
and dra2t
rarr two bits are flipped compared to the status
quo drlowasttminus 1
rarr ie we have h(d
ra1rarr
) 2 and h(dra2
rarr) 2
333 Distributed Decision-Makersrsquo Objectives and Cost ofEffort Each local decision-maker r r 1 Ms pursuesits ldquoownrdquo objective (ie related to its respective sub-prob-lem) In particular each distributed decision-maker seeks to
identify that option drt
rarrout of d
rlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrwhich
promises the highest net performance Ar ie the highestdifference between partial performance Pr
tmdashresulting fromthe contributions Cit of those particular single choicesassigned to decision-maker rmdashand the related cost of efforts
for implementing drt
rarr
Art d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (5)
where the partial performance Prt (d
rt
rarr) of decision-maker rrsquos
contribution to overall performance Vt (see equation (4)) isgiven by
Prt d
rt
rarr1113874 1113875
1N
1113944
Nrs
i1+w
Cit (6)
with w 1113936rminus 1p1N
ps for rgt 1 and w 0 for r 1
In case of interactions across the sub-problems capturedby Kex
s gt 0 choices of decision-maker r might affect thecontribution of the other decision-makersrsquo qnep choices onqrsquos parochial performance and vice versa
In the model the number of single choices altered in
terms of the Hamming distance h(drlowasttminus 1
rarr d
rt
rarr) to the status quo
(ie the number of bits flipped) is regarded as the effort to betaken by decision-maker r in order to implement an optionWith this the possible range of effort is shaped by the searchstrategy as introduced in Section 332 the lower bound forthe effort in all three search strategies equals 0 for the case
that the status quo drlowasttminus 1
rarris chosen to be kept the upper bound
is 1 in the ldquoexploitation onlyrdquo and equals 2 in the ldquoexplo-ration onlyrdquo as well as in the ambidextrous strategy
For modeling the cost of effort as customary in eco-nomics (eg [82 83]) it is assumed that higher levels ofeffort are increasingly costly Hence for distributed de-cision-maker rrsquos cost of effort Zr we have Zr(h)prime gt 0 and
Zr(h)Prime gt 0 In particular the cost of effort Zr(drt
rarr) of de-
cision-maker r is modeled to be quadratically increasingwith the Hamming distance h to the status quo ie
Zrt d
rt
rarr1113874 1113875 z
rmiddot h d
rlowasttminus 1
rarr d
rt
rarr1113874 11138751113874 1113875
2 (7)
where zr is a cost coefficient For the sake of simplicity in thesimulation experiments the cost coefficient is the same for
every decision-makers r and does not change over time Forthis reason subsequently the index r indicating on a de-cision-maker r is skipped when addressing the cost co-efficient (considering decision-makers which areheterogeneous in respect to their cost functions (as it couldbe captured by different cost coefficients zr) would be anatural extension of the research effort presented here)
334 Evaluation of Options When evaluating their optionsthe decentralized decision-makers suffer from two types oflimited information First without eventual further com-munication prescribed by the coordination mechanism (seeSection 34) decision-maker r is not able to anticipate theother decision-makersrsquo qne r choices and thus assumes thatthey will stay with the status quo ie that they will opt for
dqlowasttminus 1
rarr(for this see also [84]) +is is particularly relevant in
case of inter-sub-problem interdependencies when otherlocal decision-makersrsquo actions may affect performance ofdecision-maker r
Second decentralized decision-makers are not able toperfectly ex-ante evaluate their newly discovered optionsrsquo
dra1t
rarrand d
ra2t
rarreffects on their partial performance Pr
t (drt
rarr)
(see equation (6)) Rather the ex-ante evaluation is afflictedwith some noise In particular for the sake of simplicity adecision-maker rrsquos perceived partial performance ( 1113957Pr) isdistorted by a relative error imputed to the true perfor-mance With this our local decision-makers search on noisypartial performance landscapes (for further types of errorssee [85]) +e error terms follow a Gaussian distributionN(0 σ) with expected value 0 and standard deviations σr forevery decision-maker r errors are assumed to be in-dependent from each other Hence the perceived perfor-mance 1113957Pr
t (dt
rarr) of distributed decision-maker r is given by
1113957Prt d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 + e
rd
rt
rarr1113874 1113875 (8)
and the objective function in equation (5) modifies to
1113958Art d
rt
rarr1113874 1113875 1113957Pr
t drt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (9)
With equation (8) each distributed decision-maker r has adistinct partial and distorted ldquoviewrdquo of the true fitnesslandscape each decision-maker r is exclusively in charge ofan ldquoownrdquo part of the entireN-dimensional decision-problemas it is shaped in the current growth stage and imperfectlyestimates the performance contributions of newly discov-ered options +us at a given growth stage the modelcaptures Ms + 1 heterogeneous (distorted) views of the truelandscape ie one view per local decision-makerr 1 Ms plus a headquartersrsquo perspective (for the lattersee Section 343)
However for the status quo option we assume that eachdecision-maker r remembers the performance obtainedfrom the last period and with this knows the actual per-formance Pr
tminus 1 of the status quo should it be implemented inperiod t again
Complexity 7
Based on the evaluation of options each decision-maker
r compiles a list Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 of preferences
where drp1t
rarrindicates the most preferred option out of
drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarr Correspondingly d
rp2t
rarrdenotes the
second-most and drp3t
rarrthe third-most preferred option
34CoordinationModes for SynthesizingPlans As a result ofthe search and (imperfect) evaluation of options so far eachdistributed decision-maker has an ordered list Lr
t of pref-erences which in terms of multiagent systems reflects theindividual [2] or local plan [69] +e next step within eachperiod t is to come to a decision on the organizationrsquos overallproblem dt
rarr ie to merge the decentralized decision-makersrsquo
preferences on drt
rarrcaptured in the Ms lists Lr
t into the overallconfiguration dt
rarr +is requires to employ a mode of co-
ordination for synthesizing the local plansmdashand the verycore of this paper is to study which mode emerges underwhich conditions of search strategy and cost of effort
As it was outlined in Section 2 a multitude of modes forsynthesizing local plans has been proposed in various do-mains Out of the numerous feasible mechanisms the modelcomprises three modes which could represent particularpronounced (for not to say ldquoextremerdquo) forms of co-ordination regarding
(i) (de-)centralization in terms of (locus of) authority(ii) direction of alignment ie lateral vs vertical(iii) parallelization vs sequencing of final decision re-
garding the local plans
In particular the three types of coordination captured inthe model (see Table 1) differ in the communicationchannels (the model assumes that communication in thecourse of coordination works perfectly for an investigationof the effects of unintended communications errors see[86]) the information employed in decision-making thelocus of final decision-making and in the end the tightnessof coordination provided (for an overview and furthermodes see eg [2 57 69 87 88])
341 Decentralized Mode +e highest level of autonomy isgranted to the Ms distributed decision-makers if each ofthem is allowed to choose its most preferred option +enthe overall organizational configuration dt
rarrresults from
dt
rarr d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr1113874 1113875 (10)
Hence for decision-maker rrsquos partial decision problemNr
s the option according to
drlowastt
rarr d
rp1t
rarrforallr isin 1 Ms1113864 1113865 (11)
is implemented Obviously this type of coordination doesnot require any form of communication between thedecentralized decision-makers or with the headquarter(central agent) +e headquarter does not intervene in de-cision-making directly and its role is limited to registering
the achieved performances Vt(dt
rarr) and Pr
t (drt
rarr) in the end of
each period t and eventually to reward the decentralizeddecision-makers accordingly
342 Sequential Mode +is mode captures the idea ofldquosequential planningrdquo +e distributed decision-makersmake their final choices sequentially with for the sake ofsimplicity the sequence being given by the index r of thedecision-makers In particular in time step t decision-makerr minus 1 informs decision-maker r with 1lt rleMs about thechoices made so far ie made by the ldquoprecedingrdquo decision-makers lt r Decision-maker rgt 1 re-evaluates its ldquoownrdquo
options drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrtaking these ldquopriorrdquo choices into
accountmdashpotentially resulting in an adjusted list of pref-
erences Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 and chooses d
rp1t
rarrwhich
here depends on drminus 1p1t
rarr ie is a function of the choices of
the preceding decision-makers Hence only decision-maker1 does not have to consider previous choices and the choiceof decision-maker r (1 Ms) is made according to
drlowastt
rarr
drp1t
rarr if r 1
drp1t
rarrd
rminus 1p1t
rarr1113874 1113875 if 1lt rleΜ
⎧⎪⎪⎨
⎪⎪⎩(12)
and with equation (12) the overall configuration is given by
dt
rarr d
Mlowastt
rarr+e headquarter (type 2 agent) does not intervene
in decision-making andmdashsimilar to the decentralizedmodemdashis confined to observing the performances achievedand eventually rewarding the decentralized decision-makers accordingly
343 Proposal Mode Each local decision-maker transfersits list Lr
t of preferences to the headquarter which compilesthe first preferences to a composite vector
dC
rarr (d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr) and then evaluates the
overall performance V(dC
rarr) (see equation (4)) that this
solution promisesHowever as with decentralized decision-makers in the
model it is assumed that the headquarter is not capable toperfectly ex-ante evaluate new options ie other solutionsthan the status quo (see Section 32) Rather similar to thelocal decision-makers the headquarter suffers from somerelative noise following a Gaussian distribution with ex-pected value 0 and standard deviations σcent resulting in a
perceived overall performance 1113957V(dC
rarr) +e headquarter
8 Complexity
decides in favor of the composite vector ie dt
rarr d
Crarr
if dC
rarr
promises the same or a higher performance as the status quodtminus 1rarr
ie if
1113957V dC
rarr1113888 1113889geV d
lowasttminus 1
rarr1113874 1113875 (13)
If the composite vector dC
rarrassembled from the local
decision-makersrsquo first preferences does not meet the con-dition in equation (13) the headquarter evaluates a vectorcomposed from the decentralized decision-makersrsquo secondpreferences according to equation (13) If this also does notat least promise the performance of the status quo then theorganization stays with the status quo ie then dt
rarr dtminus 1
rarr
35 Learning-Based Adaptation of Coordination +e verycore of this research endeavor is to study which modes ofcoordination emerge within growth processes of the artificialorganizations In order to capture some kind of self-adap-tation of coordination the model employs a simple mode ofreinforcement learning (for overviews see [89 90]) based onstatistical learning ie a generalized form of the BushndashMosteller model [91 92]
+is mode of learning is chosen for the following rea-sons In the vast multitude of forms of learning studied invarious domains (eg psychology economics and com-puter science) reinforcement learning is regarded to beamong the most basic forms of learning [92] It represents afundamental possible form of humansrsquo behavior but alsoprovides some basis for learning of artificial agents [90]mdashboth regarded as DDMS in this paper Moreover in thismodel as a form of experiential learning the mid-termedreinforcement learning on the coordination mode corre-sponds to the experiential type of short-termed adaptation[60] when the decision-making systems in every single time-step search for a superior solution compared to the statusquo However it would be a natural extension of the modelto let the DDMS employ other and in particular more
advanced forms of learning about which mode of co-ordination is appropriate within the stage of growth and forthe search strategy employed and the cost of effort
In the model reinforcement learning on coordination forsynthesizing local plans is represented in the following way Inthe end of each time step t the central agent (type 2 agent seeSection 32) receives information about the overall perfor-mance Vt according to equation (4) +is allows the centralagent in every TLth period to compute the performanceenhancements achieved within the last TL periods Moreoverin every TLth period the organizations can alter the type ofcoordination mode as introduced in Section 34 Hence ourDDMS face the mid-termed decision-problem which type ofcoordination mode ac(t) isin Ac (with |Ac| 3 see Section 34)to implement in the next TL periods Let p(ac t) denote theprobability of an alternative ac(t) to be chosen at time t (with0lep(ac t)le 1 and 1113936aacisinAc (p(ac t)) 1)
+e key idea of reinforcement learning is that theprobabilities of options are updated according to the positiveor negative stimuli resulting from these options In ourcontext whether the performance enhancement ΔVt ob-tained under the regime of a certain mode of coordinationac(t) in the previous TL periods is regarded positive ornegative depends on whether or not it at least equals anaspiration level v ΔVt of type ac(t) of coordination is de-fined as the relative performance enhancement achievedwithin the last TL periods of the adaptive walk ie
ΔVt Vt minus Vtminus TL
Vtminus TL
(14)
Hence the stimulus τ(t) is
τ(t) 1 if ΔVt ge v
minus 1 if ΔVt lt v1113896 (15)
+e probabilities of options ac isin Ac are updatedaccording to the following rule with λ (where 0le λle 1)giving the reinforcement strength [92]
Table 1 Overview of the modes of coordination in the model
Type of coordination modeDecentralized Sequential Proposal
Lateral communication No Yes NoVertical communication No No YesHeadquarter intervening No No YesRe-evaluation of local plans No Yes Yes
Information employed for finaldecisions
Expected parochialperformance
Expected parochial performancetaking predecessorrsquos choices into
account
Expected organization-wideaggregated performance
Locus of final decisions on localplans Decentralized Decentralized Centralized
Temporal order of final decisionson local plans In parallel Asynchronously (in sequence) Synchronously (ldquoat oncerdquo)
Final configurations for distributeddecision-makersrsquo sub-problems
First preferences
drp1t
rarrforallr isin 1 Ms1113864 1113865
First preferences subject topreceding decision-makersrsquo
choices ie drp1t
rarr(d
rminus 1p1t
rarr) for rgt 1
drp1t
rarrfor r 1
First (or second) preferences drp1t
rarr
[or drp2t
rarr] if 1113957V(d
Crarr
)geV(dtminus 1rarr
)
Complexity 9
p ac t + 1( 1113857 p a
c t( 1113857 + λ middot
1 minus p ac t( )( 1113857 if ac ac(t)and τ(t) 1
minus p ac t( ) if ac ac(t)and τ(t) minus 1
minus p ac t( ) if ac ne ac(t)and τ(t) 1
p ac t( ) middot p ac(t) t( )
1 minus p ac(t) t( ) if ac ne ac(t)and τ(t) minus 1
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(16)
After the probabilities are updated as given in equation(16) the ldquonextrdquo mode of coordination to be employed fromt + 1 to t + TL is determined at randommdashaccording to theupdated probabilities
4 Simulation Experiments ProcessualStructure Parameters and Analysis
+is section is intended to introduce the principle structureof the simulation experiments based on the theoreticalmodel as presented in the previous Section 3 For this firstSection 41 gives an overview of the principle processualstructure of the simulations before the parameters settingsare motivated (Section 42) and the metrics employed foranalysis of experiments are introduced (Section 43)
41 Process Overview of the Simulation Model Figure 2depicts the principle processual structure of the simula-tion model based on the theoretical model as introduced inthe previous Section 3 In particular the simulation in itscore is characterized by three loops capturing three temporalhorizons
In the short term in each time step t the artificial or-ganizations search for superior solutions of their Ns-di-mensional decision-problem where the overall problem issegmented into Ms sub-problems with each delegated to Ms
local decision-making agents accordingly (type 1 agents inSection 32) In the mid-term ie in each TLth time step thecentral unit (type 2 agent) evaluates the current mode ofcoordination learns from this evaluation via reinforcementand eventually chooses another mode of coordination forthe next TL periods In the long term in every TGth timestep the decision-problem grows by a fixed number Nr
s ofadditional single choices to be made and the number Ms ofdistributed decision-makers increases by 1 (for details seeSection 31)
42 Parameter Settings
421 Parameters Fixed for all Experiments In the simula-tion experimentsmdashparameter settings are listed inTable 2mdashorganizations are observed over T 750 periodswhere in every TL 10th period eventually the mode ofcoordination is switched (the observation period T and thelearning interval TL 10 were fixed based on pretests whichindicate that the results do not principally change when theorganizations are observed for a longer time the similar
holds for an extension of the learning interval (eg toTL 20) however shortening the learning period notablybelow 10 periods does not leave the different coordinationmodes ldquoenough timerdquo to unfold their particular potentialwith respect to the aspiration level)
In every TG 250th period the organizations undergo agrowth in problem space as well as in the number of dis-tributed decision-makers
(i) In their first growth stage the organizations face anNs1 6-dimensional overall decision-problemdecomposed into two sub-problems of equal size(ie Nr
s1 3forallr isin 1 2 ) assigned to two decision-makers (Ms1 2) accordingly
(ii) In the second growth stage (ie fromt 251 to 500) three additional binary choices areto be made by the organizations for which oneadditional local decision-maker is responsi-blemdashhence the organizations comprise 3 decen-tralized decision-makers ie Ms2 3
(iii) In the third stage the decision-problem grows bythree further binary choices and hence finally theorganizations deal with an Ns3 12-dimensionalproblem and a fourth decentralized decision-makercomes into play (Ms3 4)
+e simulations are run for a moderate level of noisecaptured by parameters σr and σcent relevant for the ex-anteevaluations of options by the local decision-makers and incase of the proposal mode the central agent respectively (seeSections 32 and 343) It is assumed that the information ofthe local decision-makersmdashonly related to their respectiveNr-dimensional sub-problemsmdashare more precise than theinformation of the central unit which is related to the entireNs-dimensional decision problem (ie σr lt σcent) +is isintended to capture differentiation and specialization [8 93]due to division of labor Some empirical evidence suggeststhat noise of about 10 of the true value in the domain ofmanagement control is at a reasonable range [94]
+e modes of coordination which the organizationschoose of are motivated and introduced in Section 34 +eorganizations employ the same initial mode of coordinationnamely the ldquodecentralizedrdquo mode +is ldquosetuprdquo procedure ischosen to make sure that the adaptive processes start from aldquodefinedrdquo initial configuration and without having thelearning processes overlaid by the strong performance en-hancements that are typically made in the very first periodsof the adaptive walks (notwithstanding further simulations
10 Complexity
have shown that the overlaying effects appear to be rathernegligible) However an intuitive ldquostoryrdquo behind this setupprocedure is that the organizations start in fact without any
particular mode of coordination ie the decentralizedmode(for example because they were newly founded) and keepthis until time t 10 in this period they ldquodiscoverrdquo the two
Yes
No
Yes No
Yes No
No
Yes
Decrease of propensities of current mode of coordination to be chosen for the next TL
periods (and increase of propensities of others)
Determination of mode of coordination implemented in the next TL periods according to updated propensities
Central agent evaluates performance enhancement achievedwith the current mode of coordination in the last TL periods
Time step t = 0 growth stage s = 1number of distributed decision-making agents MS=1 = 2
Generation of a performance landscape according to the interaction structureat the first growth stage
Random-driven determination of the initial configuration dt=0 of the overalldecision-problem
Extension of performance landscape according to the interaction structure at the ldquonewrdquo growth stage s increase of number of distributed decision-making
agents by 1 ie MS = MS + 1
t = t + 1
Growth stage s = s + 1
Each distributed decision-maker r discovers alternatives a1 and a2 to the statusquo of the partial problem which is delegated to this decision-maker r
and forms its preferences (local plans)
Overall configuration dt is determined from the local plans according to the current mode of coordination
Central agent determines performance Vt obtained with configuration dt
Increase of propensities of current mode ofcoordination to be chosen for the next TL periods
(and decrease of propensities of others)
t mod TL = 0
t mod TG = 0
Positive feedback
t gt T Stop
Start
Figure 2 Principle processual structure of the simulation model
Complexity 11
alternative modes and choose randomly one option ac isin Ac
out of the three options (ie |Ac| 3) where each mode hasthe same initial probability 1|Ac| +en in every TL 10thperiod probabilities are adjusted according to the perfor-mance enhancements +e parameters for learning corre-spond to a moderate strength of learning [95] On basis ofthe updated probabilities eventually a new coordinationmode is established
422 Contingency Factors Parameters Subject to Variationacross Experiments As argued in the Introduction thisresearch effort takes a contingency perspective and inparticular intends to study the interacting effects of (1)complexity of decision-problem (2) search strategy and (3)cost of effort Accordingly these three contingent factors aresubject to variation across simulation experiments (see alsothe lower part in Table 2)
(1) Complexity of Decision-Problem In line with the idea offactorial design of simulation experiments [96] the exper-iments distinguish between two different levels of
complexity of the decision problem to be solved by theorganizations which capture two rather pronounced cases
Based on the seminal work of Simon [16] on the ar-chitecture of complexity (near) decomposability as com-pared to nondecomposability is the key aspect in theunderstanding of complexity (see also Introduction)Against this background the simulations are run for agrowing decomposable and a growing nondecomposableinteraction structure where the principle ldquotyperdquo of com-plexity is kept over the growth stages Hence the growthprocesses simulated may capture some kind of organicgrowth [97ndash99] Figure 1 provides a graphical representationof interaction matrices of the growing decision-problemswhich could capture the following situations (in the sim-ulation experiments the number of decision-makers mirrorsthe growth of the decision-problem for avoiding interferencewith effects of varying size of decision-makersrsquo scope ofcompetency (for further references see [55 100 101]))
(i) ldquodecomposablerdquo (Figure 1(a)) +is type of organi-zation and growth relates to the idea of an organi-zation consisting of self-contained ldquosub-problemsrdquo
Table 2 Parameter settings
Parameter ValuestypesParameters fixed for all experiments (see Section 421)Observation period T 750Interval of learning TL 10Interval of growth stages TG 250Growth stages s 1 2 3
Number of choicesIn growth stage s 1 Ns1 6In growth stage s 2 Ns2 9In growth stage s 3 Ns3 12
Number Ms of distributed decision-makers
In growth stage s 1 M1 2 distributed
decision-makers with sub-problems d1
rarr (d1 d2 d3)
and d2
rarr (d4 d5 d6)
In growth stage s 2 M2 3 ie one additional
distributed decision-maker 3 with sub-problem d3
rarr
(d7 d8 d9)
In growth stage s 3 M3 4 ie one furtheradditional decision-maker 4 with sub-problem
d4
rarr (d10 d11 d12)
Precision of ex-ante evaluation Distributed decision-makers σr 005forallrCentral agent (headquarter) σcent 01
Modes of coordination ac isin Ac ldquodecentralized rdquo ldquosequential rdquo ldquoproposalrdquo1113864 1113865
Aspiration level v 0Learning strength λ 05Parameters subject to variation across experiments (see Section 422)
Complexity of decision problem ldquoDecomposablerdquo ldquonondecomposablerdquofor details of interaction structures see Figure 1
Search strategy
ldquoExploitation onlyrdquo h(dra1
rarr) 1 and h(d
ra2rarr
) 1
ldquoExploitation and explorationrdquo h(dra1
rarr) 1 and
h(dra2
rarr) 2
ldquoExploration onlyrdquo h(dra1
rarr) 2 and h(d
ra2rarr
) 2
Cost of effort (cost coefficient) Baseline scenarios z 0001Sensitivity analysis z isin 0 0003 0005 001 002
12 Complexity
or ldquounitsrdquo [7 8] which have intense intra-unit in-teractions but no cross-unit interactions In the be-ginning the organizationrsquos overall decision-problemis decomposable into 2 distinct sub-problems [17]which for example might be related to differentproducts without any interrelations between themFor the 2 products 2 business units are responsible Inthe course of the growth stages the organizationldquoaddsrdquo further products and business units corre-spondingly without interrelations among the ldquooldrdquoand ldquonewrdquo products and accordingly the units
(ii) ldquonondecomposablerdquo (example given in Figure 1(b))+is case of interactionsmay capture whatmdashaccordingto the prominent classification of +ompson [7]mdashiscalled reciprocal interdependencies In particular thisstructure could represent an organization with func-tional specialization showing the typical high level ofinterrelations between sub-problemsmdashand de-partments accordingly In the course of growth it maybe that the vertical integration is increased (egestablishing an inhouse production of certain in-termediate products or sales logistics)
(2) Search Strategy As described in Section 332 thedecentralized decision-makers employ one of three funda-mental search strategies which are intended to capture ex-ploitation exploration and an ambidextrous strategy [20] asenforced by the boundary systemmdasheach characterized by thenumber of options and the Hamming distances allowed Forexample if an exploration strategy is pursued with M3 4local decision-makers and N3 12 in the final growth stageat maximum 8 digits of the overall decision-problem couldbe flipped ie two-thirds of the configuration dt
rarrcould be
altered in one time step
(3) Cost of Effort While the search strategy shapes themaximum of binary choices that could be flipped the actualalterations are affected by the local decision-makersrsquo pref-erences together with the coordination mode employedAccording to equations (7) and (9) in Section 3 the dis-tributed decision-makersrsquo preferences are affected by thecost of effort and in particular by cost coefficient z
However in order to be clear and concise the simulationexperiments are conducted in two steps First to gain a basicunderstanding of the emergence of coordination in thebaseline scenarios the cost of effort is at a moderate levelz 0001 for all local decision-makers Second a sensitivityanalysis is conducted in whose course the cost of effort isvaried from costless effort (ie z 0) to higher levels of costof effort (ie zgt 0001) in order to analyze the effects of costof effort on the emergence of coordination
43 Metrics Employed for Analysis of Simulations In thebaseline scenarios with 2 interaction structures and 3 searchstrategies under investigation at a given level of cost of effort6 different scenarios of parameters are simulated For thesensitivity analysis 5 additional levels of cost of effort are
simulated which results in 30 further scenarios For each ofin sum the 36 scenarios 2500 simulations are run with 10runs on 250 performance landscapes
+e research question of this paper boils down to thequestion which coordination modes emerge predominantlyfor which contingencies in terms of complexity searchstrategy and cost of effort Hence for answering this questionthe key metric is the relative frequencies of the coordinationmodes in the end of the observation period t 750
Moreover the relative frequencies of coordinationmodes over observation time are depicted +is allows togain an understanding of how their relative shares evolve inthe course of growth and learning
As described in Section 35 the propensities to opt for theone or the other mode of coordination is shaped by theperformance gains achieved under the current mode in thelast TL periods Hence the level of performance according toequations (2) and (4) respectively in Section 31 ie the finalperformance achieved at the end of the observation period forthe different coordination modes is of interest For this the2500 simulations for each scenario were grouped accordingto that mode of coordination which was ldquoactiverdquo (ie hasemerged) in the last period t 750 of the observation time
+ese subgroups were analyzed individually and inparticular the mean of the final performance Vt750 achievedfor each coordination mode selected at t 750 is computed aswell as the respective confidence interval at a 999 level ofconfidence
Moreover another metric informing about the effec-tiveness of the search processes is the relative frequency of theglobal maximum found in t 750 of the respective per-formance landscape which is computed for each subgroup(based on the coordination mode in t 750) separately
In order to gain some deeper understanding of the searchprocesses conducted by the DDMS two further metrics wereobserved and analyzed for each subgroup the ratio of periods inwhich the status quo is altered and the ratio of periods with false-positive alterations ie alterations in favor of a false-positiveoption (ie reducing Vt) to the T 750 periods of observation+ese metrics put some focus on the efficiency of search
5 Results and Discussion
+e results are presented in two steps First for gaining a basicunderstanding of the effects of intraorganizational complexityand search strategy on the emergence of coordination thebaseline scenarios are presented and analyzed (Section 51)While in the baseline scenarios the distributed decision-makers operate at a rather moderate though nonzero level ofcost of effort the sensitivity analysis (Section 52) illustrates theeffect of cost of effort at the local decision-makersrsquo side on thecoordination mode emerging at the systemrsquos level
51 Complexity and Search Strategy Baseline Scenarios
511 Overview For the baseline scenarios Table 3 displayscondensed results obtained from the simulation experimentsaccording to the metrics introduced in Section 43 In ad-dition Table 4 reports on the significances of mean
Complexity 13
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

before in Section 4 the simulation experiments including theparameter settings are described Section 5 reports anddiscusses the results obtained from the simulations andSection 6 provides concluding remarks
2 Related Work
+e emergence of coordination is a key question in variousdomains and accordingly the related approaches in re-search are rather manifold For example complex systemsscience studies the emergence of ldquocollective intelligencerdquo (foran overview see [40]) as apparent in linguistic conventions[41] in economics it is examined how individuals learn tocoordinate in respect to collective objectives like in publicgood games (eg [42 43]) prominent issues of multiagentsystems are the self-adaptation of consensus mechanisms invariable networks or the convergence of consensus algo-rithms (for an overview see [44])
While these streams of research clearly are of generalrelevance for this research endeavor with respect to theresearch question posed in the Introduction the paperparticularly focuses on the emergence of coordination inDDMS which face decision-problems of increasing size bymeans of an agent-based simulation
Herewith the paper also relates to the two domains ofldquoagent-based computingrdquo as Niazi and Hussain [45] put it+e research question is predominantly directed to theunderstanding of emergent phenomena in the context ofcomplex decision-problems and thus it is related to thestream of research employing agent-based simulation as aresearch methodmdashoften termed as ldquosocial simulationrdquo [46]however the research question also relates to the domain ofmultiagent systems (MAS) with its primary design focus[45 47]
With this the paper particularly builds on three lines ofresearch which are outlined subsequently (1) coordinationand in particular constraint-setting mechanisms via MCSin growing organizations (2) agent-based simulation in thedomain of organizations and management control and (3)coordination of decision-making in MAS
21 Management Control Systems in Growing OrganizationsIn this line of research the empirical study of Davila [48] onthe emergence of management control systems (MCS) insmall growing organizations provides a cornerstoneaccording to which organizational size has a positive impacton the overall level of use of MCS A key argument is thatwhen organizations grow informal controls become toocostly andor ineffective and hence more formal controlsfor purposes of motivation and monitoring are employed asthey are captured in MCS As mentioned in the In-troduction the research endeavor of this paper addressescomplexity in terms of interactions among sub-problems ingrowing decision-problems However in this respect re-search findings on MCS are somewhat ambiguous Whilelow levels of interactions have been found to be linked tobudgets operating procedures and statistical reports thelatter combined with informal coordination were found to
be employed when complexity is high [49] Some findingsindicate that with higher levels of complexity more em-phasis is put on communication between subordinate andsuperior decision-makers and that aggregated and in-tegrative information becomes more important [50]Moreover it was argued that with higher levels of inter-sub-problem interactions the uncertainty derived from a lack ofcontrol over the supplying decision-makers increases andthis in turn may result in more formal controls while at thesame time increasing the need for flexibility resulting in anemphasis on informal controls [51] In a recent study [24] ahigh level of interdependencies was found to in tendency berelated to the establishment of vertical information flows forsolving coordination problems With respect to the searchstrategy (see Introduction) first of all it is worth mentioningthat MCS are intended to provide focus for the search fornovel solutions ie aligning them with the organization-wide strategic orientation [25] Constraining the decision-making scope via boundary systems (as subsystems of MCS)was found to be positively associated with performance ofexploitative innovations with their typically tightly coupledactivitiesmdashparticularly because risk is reduced that sub-ordinate decision-makers pursue activities which are not inline with established processes [26 52] In contrast in thelong run boundary systems are argued to reduce the pro-pensity of exploration in terms of experimentation [53]
22 Agent-Based Simulation in the Domain of Organizationsand Management Control Systems Several studies employagent-based modelingmdashfollowing the tradition of ldquosocialsimulationrdquomdashin the domain of organizations [54] and as inthis paper employ the NK-frameworkmdashwith its particularcapabilities of capturing the level of complexity of the de-cision-problem and of studying the effects of different searchstrategies for superior solutions at the level of the entireorganization (for overviews see [21 37 55 56]) For ex-ample the performance of different coordination mecha-nisms in turbulent and complex task environments isanalyzed by Siggelkow and Rivkin [57] the authors iden-tifymdashfor different levels of task complexitymdashorganizationalconfigurations which appear appropriate to cope with en-vironments undergoing some external shock eg whencomplexity and turbulence are at high levels ample co-ordinative power and strategies fostering broad searchprocesses turn out to perform best however the results alsosuggest that subtle interferences with distribution of de-cision-making authority in the organizations may affectoverall performance +ese results relate to prior researchwhich indicates on the subtle interaction between com-plexity and the appropriate organizational design namelyhierarchical coordination (eg [55 58 59]) Regarding thesearch strategy (see Introduction) not only experientialsearch (ie based on processes of local search) has beenstudied but also compared to for example forward-lookingsearch (capturing decision-makersrsquo potentially imprecisebeliefs about the actions-outcome-relations) [60] or ldquosearchrdquovia imitation [61] imitation turns out to be effective for theimitator particularly at intermediate levels of complexity
Complexity 3
while with high complexity of the decision-problem smallerrors in imitation can lead to severe deviations from theintended solutions and performance losses [62] With re-spect to cost of effort for implementing new solutions (seeIntroduction) prior research suggests on subtle interactionswith problem complexity On the one hand higher cost ofeffort makes changes less attractive and hence increase theperil of inertia which is a particular relevant aspect incomplex decision-problems on the other hand they maystabilize search and prevent frequent mutual (ldquohyperactiverdquo)adjustments within an organization [63 64]
23 Coordination of Decision-Making in Multiagent SystemsCoordination among agents is a key issue of multiagentsystems (MAS) and accordingly can build on a vast body ofprior research (for reviews see [3 6 65ndash67]) With respect tothe issues focused in this paper the unpredictability of theenvironment imperfect information about the environmentas well as the fellow agents behavior and imperfect com-munication are of particular interest For multiagent sys-tems a general theoretical specification of this kind ofproblem is given by the framework of decentralized partiallyobservable Markov decision processes (dec-POMDPs)[67 68] and overviews of the multitude of techniques forcoordinating distributed (or local) plans are given by[5 13 69] According to the recent survey of Torrentildeo et al[69] the multitude of multiagent planning can be classifiedaccording to six key features (1) agent distribution (in-volvement of multiple agents in formation andor executionof plans) (2) computational processes (centralized or splitamong several processing units) (3) plan synthesis schemes(ie how and when the coordination takes place) (4)communication mechanisms (which is highly related toaspects 2 and 3) (5) heuristic search processes and (6)privacy preservation (ie coordination of plans without thatsensitive information becomes publicly available)
Within this framework the research question studied inthis paper is mainly related to aspect 3 plan synthesis (ldquoplanmergingrdquo) +e formation of plans is at least partiallydistributed across agents and once each agent has formed aplan regarding its sub-problem the emerging modes ofwhether and if so how the local plans are synthesized intoan overall plan [2 13] are studied for different levels of theplanning problemrsquos complexity and search strategies (aspect5 as mentioned above)
In MAS two principle ways for plan synthesis are dis-tinguished unthreaded planning and coordination in termsof sequential activities [69] vs interleaved coordinationwhich implies an immediate integration of planning andcoordination [70] +is paper focuses on unthreadedplanning A general model of coordination of plansaccording to unthreaded planning was introduced byMartial [2] including negotiations among agents for reso-lution of conflicts In this paper synthesizing schemes likeconcatenation of distributed plans according to certain rules[71] or iterative response planning (ie sequential in-formation and adjustment) [72] are employed (for detailssee Section 34)
For coordination theory in MAS recently Lesser andCorkill [14] raised four challenges which they argue based onempirical observations so far are reflected in research to alesser extent Two of these challenges reflect key aspects ofthe research endeavor of this paper (see Introduction) Inparticular according to Lesser and Corkill [14] (in a similarvein [69])
(1) environmental conditions like for example pre-dictability of task characteristics shape which co-ordination strategies are appropriate
(2) the dynamic adaptation of coordination seemscrucial when the environment or the problem tosolve is evolving dynamically
Both aspects correspond to key issues of this researcheffort (see Introduction) the first since this paper adopts acontingency perspective on coordination taking differentlevels of complexity different types of search behavior anddifferent levels of cost of effort into account the second sincethe research question posed in this paper boils down towhich type of coordination emerges for evolving in terms ofgrowing decision-problems
3 A Theoretical Model of Distributed Decision-Making in Growing Organizations
+is part introduces a model of distributed decision-makingin organizations facing a decision-problem which growsover time reflected in organizational growth accordingly+e organizations learn about appropriate modes of co-ordination in terms of plan synthesis (Section 23) in thecourse of growth +e description of the model is structuredinto the following steps first the model of growing decision-problems is described (Section 31) next Section 32 in-troduces the two types of agents ldquoresidingrdquo in the organi-zations before Section 33 in particular goes into details ofthe distributed (or local) decision-making agents includingtheir respective sub-problems their search strategies andtheir formation of preferences+e different schemes of plansynthesis for coordination among distributed decision-makers captured in the model are described in Section 34before the organizationsrsquo learning about the appropriatemode of coordination is modeled (Section 35)
31 Decision-Problem Based on Growing NK FitnessLandscapes +e decision-problems to be solved by theartificial organizations are modeled according to theframework of NK-fitness landscapes A major feature of NKfitness landscapes is that they allow to easily control for thecomplexity of an N-dimensional decision-problem capturedby parameter K from a ldquotechnicalrdquo perspective NK land-scapes are stochastically generated pseudo-Boolean func-tions with N bits ie F 0 1 N⟶ R+ [73 74] for a briefdescription of NK landscapes as used in managerial science(see [75]) In line with the NK-framework at time step t theorganizations face an N-dimensional binary decisionproblem ie dt
rarr (d1t dNt) with dit isin 0 1
i 1 N out of 2N different binary vectors possible
4 Complexity
Each of the two states dit isin 0 1 provides a contribution Cit
to the overall performance V(dt
rarr) where the Cit are ran-
domly drawn from a uniform distribution with 0leCit le 1+e parameter K (with 0leKleN minus 1) reflects the number ofthose choices djt jne i which also affect the performancecontribution Cit of choice dit and thus captures thecomplexity of the decision problem to be solved in terms ofthe interactions among the single decisions Hence con-tribution Cit may not only depend on the single choice dit
but also on K other choices
Cit fi dit di1t diKt1113872 1113873 (1)
with i1 iK1113864 1113865 sub 1 i minus 1 i + 1 N In case of nointeractions among choices K equals 0 and K is N minus 1 forthe maximum level of complexity where each single choice iaffects the performance contribution of each other binarychoice jne i +e overall performance Vt achieved in period tresults as normalized sum of contributions Cit from
Vt V dt
rarr1113874 1113875
1N
1113944
N
i1Cit (2)
While this so far captures the key elements of theldquostandardrdquo NK framework a distinguishing feature of themodel presented in this study is thatmdashdue to growthmdashthenumber of single choices to be made by an organization mayincrease over time ie N(t) and with this also the level ofcomplexity may rise ie K(t) Figure 1(b) gives an examplereflecting in the first growth stage a rather small decision-problem with N1 6 and K1 3 in the second stage amedium-sized decision-problem with N2 9 and K2 4growing up to a size N3 12 and K3 5 in the third growthstage More formally we have
N(t)
N1 for 0le tle t1
⋮
Ns for tsminus 1 lt tle ts
⋮
NS for tSminus 1 lt tleT
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎩
(3)
where s (1 S) captures the growth stage and Tdenotesthe entire observation period Correspondingly Ks gives thelevel of complexity in the respective periods of time +eoverall performance (see equation (2)) herewith modifies to
Vt V dt
rarr1113874 1113875
1Ns
1113944
Ns
i1Cit (4)
With this the overall performance is ldquodynamicallyrdquo nor-malized to the problem size Ns moreover in the analysis of thesimulation results the final performance VT 750 is given inrelation to the global maxima of the respective performancelandscapes otherwise the results could not be compared overtime and across different performance landscapes
32Agents and8eirCapabilities Two types of agents residein the organizations
(1) +e distributed (or local) ldquodecision-making agentsrdquo(type 1) which are in primary responsibility of de-cision-making where each of these agents is in chargefor a distinct sub-problem of the overall (growing)decision-problem +ese agents could for examplereflect managers each being the head of a departmentin an organization
(2) Each organization has one central agent (type 2)mdashcapturing for example the headquarter of afirmmdashbeing responsible for
(a) learning-based selection of a mode of co-ordination in every TL-th period
(b) eventuallymdashie subject to the coordinationmode selectedmdashactively intervening in plansynthesis
(c) registering the performance achieved by eachdistributed decision-making agent (see above)and eventually rewarding it accordingly
As familiar in agent-based computational economics(eg [76 77]) the agents captured in the model show someform of bounded rationality [19] In particular both types ofagents ie distributed decision-making agents and head-quarter are assumed to decide on basis of bounded in-formation in terms of not knowing the entire search spaceand having limited computational power [78ndash80] Hencealthough distributed decision-makers are self-interestedpursuing their particular goals and in a similar vein thecentral agent seeks to maximize overall performance(equation (4)) the agents are not optimizers but conductstepwise search processes in terms of neighborhood searchMoreover the agents are not able to perfectly evaluate newlyfound options to their respective decision-problems
+e properties of the distributed decision-making agents(type 1) are described more precisely in Section 33 while thecentral agent (type 2) is depicted more in detail in Sections34 and 35
33 Distributed Decision-Making Agentsrsquo Search andFormation of Preferences
331 Decomposition and Delegation +e Ns-dimensionaldecision problem is partitioned into Ms disjoint partialproblems of for the sake of simplicity equal size Nr
s Each ofthese sub-problems is delegated to one distributed decision-maker r (ie one agent of type 1)mdashwith particular com-petencies of decision-maker r related to the respective sub-problem being subject to the mode of coordinationimplemented at that time However the distributed de-cision-makers are at least preparing choices regarding theirpartition of the overall Ns-dimensional decision-problem ineach period t (ie depicting ldquounthreaded planningrdquo fromMAS see Section 23)
+e growth processes in the problem space are reflectedin the number of distributed decision-makers (type 1) ac-cordingly More formally we have the number of distributeddecision-makers being a function of time ie Ms(t) and ateach given growth stage s the scope of competencies of the
Complexity 5
distributed decision-makers are of equal size in terms ofnumber of single choices Nr
s assigned to them (see forexample the shaded areas in Figure 1)
332 Search Strategies In the model as mentioned abovedistributed decision-makers are not able to survey the entiresearch space of their decision-problem and hence they arenot able to ldquolocaterdquo the optimal solution of their partialdecision problem ldquoat oncerdquo rather they search stepwise forsuperior solutions In each time step t distributed decision-
maker r considers two alternative solutions dra1t
rarrand d
ra2t
rarrfor
its partial decision-problem compared to the status quo drlowasttminus 1
rarr
With this in each of the search strategies modeled and inevery time step decision-maker r has three options to choosefrommdashincluding staying with the status quo
However the model captures thatmdashas a part of theboundary system in the MCSmdashsome boundaries related to
the distances of the two alternatives dra1t
rarrand d
ra2t
rarrcompared
to the status quo are set and enforced by the central unit(type 2 agent) In particular the boundary system enforcessearch strategies being of an exploitative explorative orambidextrous nature [20 58 81] and accordingly the modelcomprises the following three search strategies
(i) ldquoexploitation onlyrdquo both alternatives dra1t
rarrand d
ra2t
rarr
discovered by distributed decision-maker r differ from
the status quo drlowasttminus 1
rarrby one digit respectively Hence
the Hamming distance h(dra1
rarr) 1113936
Nr
i1|drlowasttminus 1
rarrminus d
ra1t
rarr|
of the first alternative to the status quo equals 1 as wellas is the case for the second alternative (ie
h(dra2
rarr) 1)
(ii) ldquoexploitation and explorationrdquo the local decision-makers are allowed to alternatively consider anoption with one bit flipped and another where two
1 2 3 4 5 6 1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8 9 10 11 121 X X X ndash ndash ndash 1 X X X ndash ndash ndash ndash ndash ndash 1 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash2 X X X ndash ndash ndash 2 X X X ndash ndash ndash ndash ndash ndash 2 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash3 X X X ndash ndash ndash 3 X X X ndash ndash ndash ndash ndash ndash 3 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash4 ndash ndash ndash X X X 4 ndash ndash ndash X X X ndash ndash ndash 4 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash5 ndash ndash ndash X X X 5 ndash ndash ndash X X X ndash ndash ndash 5 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash6 ndash ndash ndash X X X 6 ndash ndash ndash X X X ndash ndash ndash 6 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash
7 ndash ndash ndash ndash ndash ndash X X X 7 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash8 ndash ndash ndash ndash ndash ndash X X X 8 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash9 ndash ndash ndash ndash ndash ndash X X X 9 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash
10 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X11 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X12 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X
Choi
ce d
iD
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M D
Dec
M
Growth stage s = 1 (N1 = 6 K1 = 2 K1ex = 0)
Performance contribution Cj
Growth stage s = 2 (N2 = 9 K2 = 2 K2ex = 0)
Performance contribution Cj
Growth stage s = 3 (N3 = 12 K3 = 2 K3ex = 0)
Performance contribution Cj
Scope of primary control of distributed decision maker r (type 1 agent)X Choice i affects performance contribution jndash Choice i does not affect performance contribution j
Distributed decision maker (type 1 agent)DDecM
(a)
1 2 3 4 5 6 1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8 9 10 11 121 X X X ndash ndash X 1 X X X ndash ndash X X ndash ndash 1 X X X ndash ndash X X ndash ndash ndash ndash X2 X X X ndash X ndash 2 X X X ndash X ndash ndash X ndash 2 X X X ndash X ndash ndash X ndash ndash X ndash3 X X X X ndash ndash 3 X X X X ndash ndash ndash ndash ndash 3 X X X X ndash ndash ndash ndash ndash X ndash ndash4 X ndash ndash X X X 4 X ndash ndash X X X X ndash X 4 X ndash ndash X X X X ndash X ndash ndash X5 ndash X ndash X X X 5 ndash X ndash X X X ndash X ndash 5 ndash X ndash X X X ndash X ndash ndash X ndash6 ndash ndash X X X X 6 ndash ndash X X X X ndash ndash X 6 ndash ndash X X X X ndash ndash X X ndash ndash
7 ndash X ndash ndash ndash X X X X 7 ndash X ndash ndash ndash X X X X ndash ndash X8 ndash ndash X ndash X ndash X X X 8 ndash ndash X ndash X ndash X X X ndash X ndash9 X ndash ndash X ndash ndash X X X 9 X ndash ndash X ndash ndash X X X X ndash ndash
10 ndash X ndash X ndash ndash ndash X ndash X X X11 ndash ndash X ndash X ndash X ndash ndash X X X12 X ndash ndash ndash ndash X ndash ndash X X X X
Choi
ce d
iD
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M
Growth stage s = 1 (N1 = 6 K1 = 3 K1ex = 1)
Performance contribution Cj
Growth stage s = 2 (N2 = 9 K2 = 4 K2ex = 2)
Performance contribution Cj
Growth stage s = 3 (N3 = 12 K3 = 5 K3ex = 3)
Performance contribution Cj
Scope of primary control of distributed decision maker r (type 1 agent)X Choice i affects performance contribution jndash Choice i does not affect performance contribution j
Distributed decision maker (type 1 agent)DDecM
(b)
Figure 1 Interaction structures and growth stages in the simulation experiments (a) decomposable and (b) nondecomposable
6 Complexity
digits are altered ie the Hamming distances are
h(dra1
rarr) 1 and h(d
ra2rarr
) 2(iii) ldquoexploration onlyrdquo in each of both alternatives d
ra1t
rarr
and dra2t
rarr two bits are flipped compared to the status
quo drlowasttminus 1
rarr ie we have h(d
ra1rarr
) 2 and h(dra2
rarr) 2
333 Distributed Decision-Makersrsquo Objectives and Cost ofEffort Each local decision-maker r r 1 Ms pursuesits ldquoownrdquo objective (ie related to its respective sub-prob-lem) In particular each distributed decision-maker seeks to
identify that option drt
rarrout of d
rlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrwhich
promises the highest net performance Ar ie the highestdifference between partial performance Pr
tmdashresulting fromthe contributions Cit of those particular single choicesassigned to decision-maker rmdashand the related cost of efforts
for implementing drt
rarr
Art d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (5)
where the partial performance Prt (d
rt
rarr) of decision-maker rrsquos
contribution to overall performance Vt (see equation (4)) isgiven by
Prt d
rt
rarr1113874 1113875
1N
1113944
Nrs
i1+w
Cit (6)
with w 1113936rminus 1p1N
ps for rgt 1 and w 0 for r 1
In case of interactions across the sub-problems capturedby Kex
s gt 0 choices of decision-maker r might affect thecontribution of the other decision-makersrsquo qnep choices onqrsquos parochial performance and vice versa
In the model the number of single choices altered in
terms of the Hamming distance h(drlowasttminus 1
rarr d
rt
rarr) to the status quo
(ie the number of bits flipped) is regarded as the effort to betaken by decision-maker r in order to implement an optionWith this the possible range of effort is shaped by the searchstrategy as introduced in Section 332 the lower bound forthe effort in all three search strategies equals 0 for the case
that the status quo drlowasttminus 1
rarris chosen to be kept the upper bound
is 1 in the ldquoexploitation onlyrdquo and equals 2 in the ldquoexplo-ration onlyrdquo as well as in the ambidextrous strategy
For modeling the cost of effort as customary in eco-nomics (eg [82 83]) it is assumed that higher levels ofeffort are increasingly costly Hence for distributed de-cision-maker rrsquos cost of effort Zr we have Zr(h)prime gt 0 and
Zr(h)Prime gt 0 In particular the cost of effort Zr(drt
rarr) of de-
cision-maker r is modeled to be quadratically increasingwith the Hamming distance h to the status quo ie
Zrt d
rt
rarr1113874 1113875 z
rmiddot h d
rlowasttminus 1
rarr d
rt
rarr1113874 11138751113874 1113875
2 (7)
where zr is a cost coefficient For the sake of simplicity in thesimulation experiments the cost coefficient is the same for
every decision-makers r and does not change over time Forthis reason subsequently the index r indicating on a de-cision-maker r is skipped when addressing the cost co-efficient (considering decision-makers which areheterogeneous in respect to their cost functions (as it couldbe captured by different cost coefficients zr) would be anatural extension of the research effort presented here)
334 Evaluation of Options When evaluating their optionsthe decentralized decision-makers suffer from two types oflimited information First without eventual further com-munication prescribed by the coordination mechanism (seeSection 34) decision-maker r is not able to anticipate theother decision-makersrsquo qne r choices and thus assumes thatthey will stay with the status quo ie that they will opt for
dqlowasttminus 1
rarr(for this see also [84]) +is is particularly relevant in
case of inter-sub-problem interdependencies when otherlocal decision-makersrsquo actions may affect performance ofdecision-maker r
Second decentralized decision-makers are not able toperfectly ex-ante evaluate their newly discovered optionsrsquo
dra1t
rarrand d
ra2t
rarreffects on their partial performance Pr
t (drt
rarr)
(see equation (6)) Rather the ex-ante evaluation is afflictedwith some noise In particular for the sake of simplicity adecision-maker rrsquos perceived partial performance ( 1113957Pr) isdistorted by a relative error imputed to the true perfor-mance With this our local decision-makers search on noisypartial performance landscapes (for further types of errorssee [85]) +e error terms follow a Gaussian distributionN(0 σ) with expected value 0 and standard deviations σr forevery decision-maker r errors are assumed to be in-dependent from each other Hence the perceived perfor-mance 1113957Pr
t (dt
rarr) of distributed decision-maker r is given by
1113957Prt d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 + e
rd
rt
rarr1113874 1113875 (8)
and the objective function in equation (5) modifies to
1113958Art d
rt
rarr1113874 1113875 1113957Pr
t drt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (9)
With equation (8) each distributed decision-maker r has adistinct partial and distorted ldquoviewrdquo of the true fitnesslandscape each decision-maker r is exclusively in charge ofan ldquoownrdquo part of the entireN-dimensional decision-problemas it is shaped in the current growth stage and imperfectlyestimates the performance contributions of newly discov-ered options +us at a given growth stage the modelcaptures Ms + 1 heterogeneous (distorted) views of the truelandscape ie one view per local decision-makerr 1 Ms plus a headquartersrsquo perspective (for the lattersee Section 343)
However for the status quo option we assume that eachdecision-maker r remembers the performance obtainedfrom the last period and with this knows the actual per-formance Pr
tminus 1 of the status quo should it be implemented inperiod t again
Complexity 7
Based on the evaluation of options each decision-maker
r compiles a list Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 of preferences
where drp1t
rarrindicates the most preferred option out of
drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarr Correspondingly d
rp2t
rarrdenotes the
second-most and drp3t
rarrthe third-most preferred option
34CoordinationModes for SynthesizingPlans As a result ofthe search and (imperfect) evaluation of options so far eachdistributed decision-maker has an ordered list Lr
t of pref-erences which in terms of multiagent systems reflects theindividual [2] or local plan [69] +e next step within eachperiod t is to come to a decision on the organizationrsquos overallproblem dt
rarr ie to merge the decentralized decision-makersrsquo
preferences on drt
rarrcaptured in the Ms lists Lr
t into the overallconfiguration dt
rarr +is requires to employ a mode of co-
ordination for synthesizing the local plansmdashand the verycore of this paper is to study which mode emerges underwhich conditions of search strategy and cost of effort
As it was outlined in Section 2 a multitude of modes forsynthesizing local plans has been proposed in various do-mains Out of the numerous feasible mechanisms the modelcomprises three modes which could represent particularpronounced (for not to say ldquoextremerdquo) forms of co-ordination regarding
(i) (de-)centralization in terms of (locus of) authority(ii) direction of alignment ie lateral vs vertical(iii) parallelization vs sequencing of final decision re-
garding the local plans
In particular the three types of coordination captured inthe model (see Table 1) differ in the communicationchannels (the model assumes that communication in thecourse of coordination works perfectly for an investigationof the effects of unintended communications errors see[86]) the information employed in decision-making thelocus of final decision-making and in the end the tightnessof coordination provided (for an overview and furthermodes see eg [2 57 69 87 88])
341 Decentralized Mode +e highest level of autonomy isgranted to the Ms distributed decision-makers if each ofthem is allowed to choose its most preferred option +enthe overall organizational configuration dt
rarrresults from
dt
rarr d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr1113874 1113875 (10)
Hence for decision-maker rrsquos partial decision problemNr
s the option according to
drlowastt
rarr d
rp1t
rarrforallr isin 1 Ms1113864 1113865 (11)
is implemented Obviously this type of coordination doesnot require any form of communication between thedecentralized decision-makers or with the headquarter(central agent) +e headquarter does not intervene in de-cision-making directly and its role is limited to registering
the achieved performances Vt(dt
rarr) and Pr
t (drt
rarr) in the end of
each period t and eventually to reward the decentralizeddecision-makers accordingly
342 Sequential Mode +is mode captures the idea ofldquosequential planningrdquo +e distributed decision-makersmake their final choices sequentially with for the sake ofsimplicity the sequence being given by the index r of thedecision-makers In particular in time step t decision-makerr minus 1 informs decision-maker r with 1lt rleMs about thechoices made so far ie made by the ldquoprecedingrdquo decision-makers lt r Decision-maker rgt 1 re-evaluates its ldquoownrdquo
options drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrtaking these ldquopriorrdquo choices into
accountmdashpotentially resulting in an adjusted list of pref-
erences Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 and chooses d
rp1t
rarrwhich
here depends on drminus 1p1t
rarr ie is a function of the choices of
the preceding decision-makers Hence only decision-maker1 does not have to consider previous choices and the choiceof decision-maker r (1 Ms) is made according to
drlowastt
rarr
drp1t
rarr if r 1
drp1t
rarrd
rminus 1p1t
rarr1113874 1113875 if 1lt rleΜ
⎧⎪⎪⎨
⎪⎪⎩(12)
and with equation (12) the overall configuration is given by
dt
rarr d
Mlowastt
rarr+e headquarter (type 2 agent) does not intervene
in decision-making andmdashsimilar to the decentralizedmodemdashis confined to observing the performances achievedand eventually rewarding the decentralized decision-makers accordingly
343 Proposal Mode Each local decision-maker transfersits list Lr
t of preferences to the headquarter which compilesthe first preferences to a composite vector
dC
rarr (d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr) and then evaluates the
overall performance V(dC
rarr) (see equation (4)) that this
solution promisesHowever as with decentralized decision-makers in the
model it is assumed that the headquarter is not capable toperfectly ex-ante evaluate new options ie other solutionsthan the status quo (see Section 32) Rather similar to thelocal decision-makers the headquarter suffers from somerelative noise following a Gaussian distribution with ex-pected value 0 and standard deviations σcent resulting in a
perceived overall performance 1113957V(dC
rarr) +e headquarter
8 Complexity
decides in favor of the composite vector ie dt
rarr d
Crarr
if dC
rarr
promises the same or a higher performance as the status quodtminus 1rarr
ie if
1113957V dC
rarr1113888 1113889geV d
lowasttminus 1
rarr1113874 1113875 (13)
If the composite vector dC
rarrassembled from the local
decision-makersrsquo first preferences does not meet the con-dition in equation (13) the headquarter evaluates a vectorcomposed from the decentralized decision-makersrsquo secondpreferences according to equation (13) If this also does notat least promise the performance of the status quo then theorganization stays with the status quo ie then dt
rarr dtminus 1
rarr
35 Learning-Based Adaptation of Coordination +e verycore of this research endeavor is to study which modes ofcoordination emerge within growth processes of the artificialorganizations In order to capture some kind of self-adap-tation of coordination the model employs a simple mode ofreinforcement learning (for overviews see [89 90]) based onstatistical learning ie a generalized form of the BushndashMosteller model [91 92]
+is mode of learning is chosen for the following rea-sons In the vast multitude of forms of learning studied invarious domains (eg psychology economics and com-puter science) reinforcement learning is regarded to beamong the most basic forms of learning [92] It represents afundamental possible form of humansrsquo behavior but alsoprovides some basis for learning of artificial agents [90]mdashboth regarded as DDMS in this paper Moreover in thismodel as a form of experiential learning the mid-termedreinforcement learning on the coordination mode corre-sponds to the experiential type of short-termed adaptation[60] when the decision-making systems in every single time-step search for a superior solution compared to the statusquo However it would be a natural extension of the modelto let the DDMS employ other and in particular more
advanced forms of learning about which mode of co-ordination is appropriate within the stage of growth and forthe search strategy employed and the cost of effort
In the model reinforcement learning on coordination forsynthesizing local plans is represented in the following way Inthe end of each time step t the central agent (type 2 agent seeSection 32) receives information about the overall perfor-mance Vt according to equation (4) +is allows the centralagent in every TLth period to compute the performanceenhancements achieved within the last TL periods Moreoverin every TLth period the organizations can alter the type ofcoordination mode as introduced in Section 34 Hence ourDDMS face the mid-termed decision-problem which type ofcoordination mode ac(t) isin Ac (with |Ac| 3 see Section 34)to implement in the next TL periods Let p(ac t) denote theprobability of an alternative ac(t) to be chosen at time t (with0lep(ac t)le 1 and 1113936aacisinAc (p(ac t)) 1)
+e key idea of reinforcement learning is that theprobabilities of options are updated according to the positiveor negative stimuli resulting from these options In ourcontext whether the performance enhancement ΔVt ob-tained under the regime of a certain mode of coordinationac(t) in the previous TL periods is regarded positive ornegative depends on whether or not it at least equals anaspiration level v ΔVt of type ac(t) of coordination is de-fined as the relative performance enhancement achievedwithin the last TL periods of the adaptive walk ie
ΔVt Vt minus Vtminus TL
Vtminus TL
(14)
Hence the stimulus τ(t) is
τ(t) 1 if ΔVt ge v
minus 1 if ΔVt lt v1113896 (15)
+e probabilities of options ac isin Ac are updatedaccording to the following rule with λ (where 0le λle 1)giving the reinforcement strength [92]
Table 1 Overview of the modes of coordination in the model
Type of coordination modeDecentralized Sequential Proposal
Lateral communication No Yes NoVertical communication No No YesHeadquarter intervening No No YesRe-evaluation of local plans No Yes Yes
Information employed for finaldecisions
Expected parochialperformance
Expected parochial performancetaking predecessorrsquos choices into
account
Expected organization-wideaggregated performance
Locus of final decisions on localplans Decentralized Decentralized Centralized
Temporal order of final decisionson local plans In parallel Asynchronously (in sequence) Synchronously (ldquoat oncerdquo)
Final configurations for distributeddecision-makersrsquo sub-problems
First preferences
drp1t
rarrforallr isin 1 Ms1113864 1113865
First preferences subject topreceding decision-makersrsquo
choices ie drp1t
rarr(d
rminus 1p1t
rarr) for rgt 1
drp1t
rarrfor r 1
First (or second) preferences drp1t
rarr
[or drp2t
rarr] if 1113957V(d
Crarr
)geV(dtminus 1rarr
)
Complexity 9
p ac t + 1( 1113857 p a
c t( 1113857 + λ middot
1 minus p ac t( )( 1113857 if ac ac(t)and τ(t) 1
minus p ac t( ) if ac ac(t)and τ(t) minus 1
minus p ac t( ) if ac ne ac(t)and τ(t) 1
p ac t( ) middot p ac(t) t( )
1 minus p ac(t) t( ) if ac ne ac(t)and τ(t) minus 1
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(16)
After the probabilities are updated as given in equation(16) the ldquonextrdquo mode of coordination to be employed fromt + 1 to t + TL is determined at randommdashaccording to theupdated probabilities
4 Simulation Experiments ProcessualStructure Parameters and Analysis
+is section is intended to introduce the principle structureof the simulation experiments based on the theoreticalmodel as presented in the previous Section 3 For this firstSection 41 gives an overview of the principle processualstructure of the simulations before the parameters settingsare motivated (Section 42) and the metrics employed foranalysis of experiments are introduced (Section 43)
41 Process Overview of the Simulation Model Figure 2depicts the principle processual structure of the simula-tion model based on the theoretical model as introduced inthe previous Section 3 In particular the simulation in itscore is characterized by three loops capturing three temporalhorizons
In the short term in each time step t the artificial or-ganizations search for superior solutions of their Ns-di-mensional decision-problem where the overall problem issegmented into Ms sub-problems with each delegated to Ms
local decision-making agents accordingly (type 1 agents inSection 32) In the mid-term ie in each TLth time step thecentral unit (type 2 agent) evaluates the current mode ofcoordination learns from this evaluation via reinforcementand eventually chooses another mode of coordination forthe next TL periods In the long term in every TGth timestep the decision-problem grows by a fixed number Nr
s ofadditional single choices to be made and the number Ms ofdistributed decision-makers increases by 1 (for details seeSection 31)
42 Parameter Settings
421 Parameters Fixed for all Experiments In the simula-tion experimentsmdashparameter settings are listed inTable 2mdashorganizations are observed over T 750 periodswhere in every TL 10th period eventually the mode ofcoordination is switched (the observation period T and thelearning interval TL 10 were fixed based on pretests whichindicate that the results do not principally change when theorganizations are observed for a longer time the similar
holds for an extension of the learning interval (eg toTL 20) however shortening the learning period notablybelow 10 periods does not leave the different coordinationmodes ldquoenough timerdquo to unfold their particular potentialwith respect to the aspiration level)
In every TG 250th period the organizations undergo agrowth in problem space as well as in the number of dis-tributed decision-makers
(i) In their first growth stage the organizations face anNs1 6-dimensional overall decision-problemdecomposed into two sub-problems of equal size(ie Nr
s1 3forallr isin 1 2 ) assigned to two decision-makers (Ms1 2) accordingly
(ii) In the second growth stage (ie fromt 251 to 500) three additional binary choices areto be made by the organizations for which oneadditional local decision-maker is responsi-blemdashhence the organizations comprise 3 decen-tralized decision-makers ie Ms2 3
(iii) In the third stage the decision-problem grows bythree further binary choices and hence finally theorganizations deal with an Ns3 12-dimensionalproblem and a fourth decentralized decision-makercomes into play (Ms3 4)
+e simulations are run for a moderate level of noisecaptured by parameters σr and σcent relevant for the ex-anteevaluations of options by the local decision-makers and incase of the proposal mode the central agent respectively (seeSections 32 and 343) It is assumed that the information ofthe local decision-makersmdashonly related to their respectiveNr-dimensional sub-problemsmdashare more precise than theinformation of the central unit which is related to the entireNs-dimensional decision problem (ie σr lt σcent) +is isintended to capture differentiation and specialization [8 93]due to division of labor Some empirical evidence suggeststhat noise of about 10 of the true value in the domain ofmanagement control is at a reasonable range [94]
+e modes of coordination which the organizationschoose of are motivated and introduced in Section 34 +eorganizations employ the same initial mode of coordinationnamely the ldquodecentralizedrdquo mode +is ldquosetuprdquo procedure ischosen to make sure that the adaptive processes start from aldquodefinedrdquo initial configuration and without having thelearning processes overlaid by the strong performance en-hancements that are typically made in the very first periodsof the adaptive walks (notwithstanding further simulations
10 Complexity
have shown that the overlaying effects appear to be rathernegligible) However an intuitive ldquostoryrdquo behind this setupprocedure is that the organizations start in fact without any
particular mode of coordination ie the decentralizedmode(for example because they were newly founded) and keepthis until time t 10 in this period they ldquodiscoverrdquo the two
Yes
No
Yes No
Yes No
No
Yes
Decrease of propensities of current mode of coordination to be chosen for the next TL
periods (and increase of propensities of others)
Determination of mode of coordination implemented in the next TL periods according to updated propensities
Central agent evaluates performance enhancement achievedwith the current mode of coordination in the last TL periods
Time step t = 0 growth stage s = 1number of distributed decision-making agents MS=1 = 2
Generation of a performance landscape according to the interaction structureat the first growth stage
Random-driven determination of the initial configuration dt=0 of the overalldecision-problem
Extension of performance landscape according to the interaction structure at the ldquonewrdquo growth stage s increase of number of distributed decision-making
agents by 1 ie MS = MS + 1
t = t + 1
Growth stage s = s + 1
Each distributed decision-maker r discovers alternatives a1 and a2 to the statusquo of the partial problem which is delegated to this decision-maker r
and forms its preferences (local plans)
Overall configuration dt is determined from the local plans according to the current mode of coordination
Central agent determines performance Vt obtained with configuration dt
Increase of propensities of current mode ofcoordination to be chosen for the next TL periods
(and decrease of propensities of others)
t mod TL = 0
t mod TG = 0
Positive feedback
t gt T Stop
Start
Figure 2 Principle processual structure of the simulation model
Complexity 11
alternative modes and choose randomly one option ac isin Ac
out of the three options (ie |Ac| 3) where each mode hasthe same initial probability 1|Ac| +en in every TL 10thperiod probabilities are adjusted according to the perfor-mance enhancements +e parameters for learning corre-spond to a moderate strength of learning [95] On basis ofthe updated probabilities eventually a new coordinationmode is established
422 Contingency Factors Parameters Subject to Variationacross Experiments As argued in the Introduction thisresearch effort takes a contingency perspective and inparticular intends to study the interacting effects of (1)complexity of decision-problem (2) search strategy and (3)cost of effort Accordingly these three contingent factors aresubject to variation across simulation experiments (see alsothe lower part in Table 2)
(1) Complexity of Decision-Problem In line with the idea offactorial design of simulation experiments [96] the exper-iments distinguish between two different levels of
complexity of the decision problem to be solved by theorganizations which capture two rather pronounced cases
Based on the seminal work of Simon [16] on the ar-chitecture of complexity (near) decomposability as com-pared to nondecomposability is the key aspect in theunderstanding of complexity (see also Introduction)Against this background the simulations are run for agrowing decomposable and a growing nondecomposableinteraction structure where the principle ldquotyperdquo of com-plexity is kept over the growth stages Hence the growthprocesses simulated may capture some kind of organicgrowth [97ndash99] Figure 1 provides a graphical representationof interaction matrices of the growing decision-problemswhich could capture the following situations (in the sim-ulation experiments the number of decision-makers mirrorsthe growth of the decision-problem for avoiding interferencewith effects of varying size of decision-makersrsquo scope ofcompetency (for further references see [55 100 101]))
(i) ldquodecomposablerdquo (Figure 1(a)) +is type of organi-zation and growth relates to the idea of an organi-zation consisting of self-contained ldquosub-problemsrdquo
Table 2 Parameter settings
Parameter ValuestypesParameters fixed for all experiments (see Section 421)Observation period T 750Interval of learning TL 10Interval of growth stages TG 250Growth stages s 1 2 3
Number of choicesIn growth stage s 1 Ns1 6In growth stage s 2 Ns2 9In growth stage s 3 Ns3 12
Number Ms of distributed decision-makers
In growth stage s 1 M1 2 distributed
decision-makers with sub-problems d1
rarr (d1 d2 d3)
and d2
rarr (d4 d5 d6)
In growth stage s 2 M2 3 ie one additional
distributed decision-maker 3 with sub-problem d3
rarr
(d7 d8 d9)
In growth stage s 3 M3 4 ie one furtheradditional decision-maker 4 with sub-problem
d4
rarr (d10 d11 d12)
Precision of ex-ante evaluation Distributed decision-makers σr 005forallrCentral agent (headquarter) σcent 01
Modes of coordination ac isin Ac ldquodecentralized rdquo ldquosequential rdquo ldquoproposalrdquo1113864 1113865
Aspiration level v 0Learning strength λ 05Parameters subject to variation across experiments (see Section 422)
Complexity of decision problem ldquoDecomposablerdquo ldquonondecomposablerdquofor details of interaction structures see Figure 1
Search strategy
ldquoExploitation onlyrdquo h(dra1
rarr) 1 and h(d
ra2rarr
) 1
ldquoExploitation and explorationrdquo h(dra1
rarr) 1 and
h(dra2
rarr) 2
ldquoExploration onlyrdquo h(dra1
rarr) 2 and h(d
ra2rarr
) 2
Cost of effort (cost coefficient) Baseline scenarios z 0001Sensitivity analysis z isin 0 0003 0005 001 002
12 Complexity
or ldquounitsrdquo [7 8] which have intense intra-unit in-teractions but no cross-unit interactions In the be-ginning the organizationrsquos overall decision-problemis decomposable into 2 distinct sub-problems [17]which for example might be related to differentproducts without any interrelations between themFor the 2 products 2 business units are responsible Inthe course of the growth stages the organizationldquoaddsrdquo further products and business units corre-spondingly without interrelations among the ldquooldrdquoand ldquonewrdquo products and accordingly the units
(ii) ldquonondecomposablerdquo (example given in Figure 1(b))+is case of interactionsmay capture whatmdashaccordingto the prominent classification of +ompson [7]mdashiscalled reciprocal interdependencies In particular thisstructure could represent an organization with func-tional specialization showing the typical high level ofinterrelations between sub-problemsmdashand de-partments accordingly In the course of growth it maybe that the vertical integration is increased (egestablishing an inhouse production of certain in-termediate products or sales logistics)
(2) Search Strategy As described in Section 332 thedecentralized decision-makers employ one of three funda-mental search strategies which are intended to capture ex-ploitation exploration and an ambidextrous strategy [20] asenforced by the boundary systemmdasheach characterized by thenumber of options and the Hamming distances allowed Forexample if an exploration strategy is pursued with M3 4local decision-makers and N3 12 in the final growth stageat maximum 8 digits of the overall decision-problem couldbe flipped ie two-thirds of the configuration dt
rarrcould be
altered in one time step
(3) Cost of Effort While the search strategy shapes themaximum of binary choices that could be flipped the actualalterations are affected by the local decision-makersrsquo pref-erences together with the coordination mode employedAccording to equations (7) and (9) in Section 3 the dis-tributed decision-makersrsquo preferences are affected by thecost of effort and in particular by cost coefficient z
However in order to be clear and concise the simulationexperiments are conducted in two steps First to gain a basicunderstanding of the emergence of coordination in thebaseline scenarios the cost of effort is at a moderate levelz 0001 for all local decision-makers Second a sensitivityanalysis is conducted in whose course the cost of effort isvaried from costless effort (ie z 0) to higher levels of costof effort (ie zgt 0001) in order to analyze the effects of costof effort on the emergence of coordination
43 Metrics Employed for Analysis of Simulations In thebaseline scenarios with 2 interaction structures and 3 searchstrategies under investigation at a given level of cost of effort6 different scenarios of parameters are simulated For thesensitivity analysis 5 additional levels of cost of effort are
simulated which results in 30 further scenarios For each ofin sum the 36 scenarios 2500 simulations are run with 10runs on 250 performance landscapes
+e research question of this paper boils down to thequestion which coordination modes emerge predominantlyfor which contingencies in terms of complexity searchstrategy and cost of effort Hence for answering this questionthe key metric is the relative frequencies of the coordinationmodes in the end of the observation period t 750
Moreover the relative frequencies of coordinationmodes over observation time are depicted +is allows togain an understanding of how their relative shares evolve inthe course of growth and learning
As described in Section 35 the propensities to opt for theone or the other mode of coordination is shaped by theperformance gains achieved under the current mode in thelast TL periods Hence the level of performance according toequations (2) and (4) respectively in Section 31 ie the finalperformance achieved at the end of the observation period forthe different coordination modes is of interest For this the2500 simulations for each scenario were grouped accordingto that mode of coordination which was ldquoactiverdquo (ie hasemerged) in the last period t 750 of the observation time
+ese subgroups were analyzed individually and inparticular the mean of the final performance Vt750 achievedfor each coordination mode selected at t 750 is computed aswell as the respective confidence interval at a 999 level ofconfidence
Moreover another metric informing about the effec-tiveness of the search processes is the relative frequency of theglobal maximum found in t 750 of the respective per-formance landscape which is computed for each subgroup(based on the coordination mode in t 750) separately
In order to gain some deeper understanding of the searchprocesses conducted by the DDMS two further metrics wereobserved and analyzed for each subgroup the ratio of periods inwhich the status quo is altered and the ratio of periods with false-positive alterations ie alterations in favor of a false-positiveoption (ie reducing Vt) to the T 750 periods of observation+ese metrics put some focus on the efficiency of search
5 Results and Discussion
+e results are presented in two steps First for gaining a basicunderstanding of the effects of intraorganizational complexityand search strategy on the emergence of coordination thebaseline scenarios are presented and analyzed (Section 51)While in the baseline scenarios the distributed decision-makers operate at a rather moderate though nonzero level ofcost of effort the sensitivity analysis (Section 52) illustrates theeffect of cost of effort at the local decision-makersrsquo side on thecoordination mode emerging at the systemrsquos level
51 Complexity and Search Strategy Baseline Scenarios
511 Overview For the baseline scenarios Table 3 displayscondensed results obtained from the simulation experimentsaccording to the metrics introduced in Section 43 In ad-dition Table 4 reports on the significances of mean
Complexity 13
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

while with high complexity of the decision-problem smallerrors in imitation can lead to severe deviations from theintended solutions and performance losses [62] With re-spect to cost of effort for implementing new solutions (seeIntroduction) prior research suggests on subtle interactionswith problem complexity On the one hand higher cost ofeffort makes changes less attractive and hence increase theperil of inertia which is a particular relevant aspect incomplex decision-problems on the other hand they maystabilize search and prevent frequent mutual (ldquohyperactiverdquo)adjustments within an organization [63 64]
23 Coordination of Decision-Making in Multiagent SystemsCoordination among agents is a key issue of multiagentsystems (MAS) and accordingly can build on a vast body ofprior research (for reviews see [3 6 65ndash67]) With respect tothe issues focused in this paper the unpredictability of theenvironment imperfect information about the environmentas well as the fellow agents behavior and imperfect com-munication are of particular interest For multiagent sys-tems a general theoretical specification of this kind ofproblem is given by the framework of decentralized partiallyobservable Markov decision processes (dec-POMDPs)[67 68] and overviews of the multitude of techniques forcoordinating distributed (or local) plans are given by[5 13 69] According to the recent survey of Torrentildeo et al[69] the multitude of multiagent planning can be classifiedaccording to six key features (1) agent distribution (in-volvement of multiple agents in formation andor executionof plans) (2) computational processes (centralized or splitamong several processing units) (3) plan synthesis schemes(ie how and when the coordination takes place) (4)communication mechanisms (which is highly related toaspects 2 and 3) (5) heuristic search processes and (6)privacy preservation (ie coordination of plans without thatsensitive information becomes publicly available)
Within this framework the research question studied inthis paper is mainly related to aspect 3 plan synthesis (ldquoplanmergingrdquo) +e formation of plans is at least partiallydistributed across agents and once each agent has formed aplan regarding its sub-problem the emerging modes ofwhether and if so how the local plans are synthesized intoan overall plan [2 13] are studied for different levels of theplanning problemrsquos complexity and search strategies (aspect5 as mentioned above)
In MAS two principle ways for plan synthesis are dis-tinguished unthreaded planning and coordination in termsof sequential activities [69] vs interleaved coordinationwhich implies an immediate integration of planning andcoordination [70] +is paper focuses on unthreadedplanning A general model of coordination of plansaccording to unthreaded planning was introduced byMartial [2] including negotiations among agents for reso-lution of conflicts In this paper synthesizing schemes likeconcatenation of distributed plans according to certain rules[71] or iterative response planning (ie sequential in-formation and adjustment) [72] are employed (for detailssee Section 34)
For coordination theory in MAS recently Lesser andCorkill [14] raised four challenges which they argue based onempirical observations so far are reflected in research to alesser extent Two of these challenges reflect key aspects ofthe research endeavor of this paper (see Introduction) Inparticular according to Lesser and Corkill [14] (in a similarvein [69])
(1) environmental conditions like for example pre-dictability of task characteristics shape which co-ordination strategies are appropriate
(2) the dynamic adaptation of coordination seemscrucial when the environment or the problem tosolve is evolving dynamically
Both aspects correspond to key issues of this researcheffort (see Introduction) the first since this paper adopts acontingency perspective on coordination taking differentlevels of complexity different types of search behavior anddifferent levels of cost of effort into account the second sincethe research question posed in this paper boils down towhich type of coordination emerges for evolving in terms ofgrowing decision-problems
3 A Theoretical Model of Distributed Decision-Making in Growing Organizations
+is part introduces a model of distributed decision-makingin organizations facing a decision-problem which growsover time reflected in organizational growth accordingly+e organizations learn about appropriate modes of co-ordination in terms of plan synthesis (Section 23) in thecourse of growth +e description of the model is structuredinto the following steps first the model of growing decision-problems is described (Section 31) next Section 32 in-troduces the two types of agents ldquoresidingrdquo in the organi-zations before Section 33 in particular goes into details ofthe distributed (or local) decision-making agents includingtheir respective sub-problems their search strategies andtheir formation of preferences+e different schemes of plansynthesis for coordination among distributed decision-makers captured in the model are described in Section 34before the organizationsrsquo learning about the appropriatemode of coordination is modeled (Section 35)
31 Decision-Problem Based on Growing NK FitnessLandscapes +e decision-problems to be solved by theartificial organizations are modeled according to theframework of NK-fitness landscapes A major feature of NKfitness landscapes is that they allow to easily control for thecomplexity of an N-dimensional decision-problem capturedby parameter K from a ldquotechnicalrdquo perspective NK land-scapes are stochastically generated pseudo-Boolean func-tions with N bits ie F 0 1 N⟶ R+ [73 74] for a briefdescription of NK landscapes as used in managerial science(see [75]) In line with the NK-framework at time step t theorganizations face an N-dimensional binary decisionproblem ie dt
rarr (d1t dNt) with dit isin 0 1
i 1 N out of 2N different binary vectors possible
4 Complexity
Each of the two states dit isin 0 1 provides a contribution Cit
to the overall performance V(dt
rarr) where the Cit are ran-
domly drawn from a uniform distribution with 0leCit le 1+e parameter K (with 0leKleN minus 1) reflects the number ofthose choices djt jne i which also affect the performancecontribution Cit of choice dit and thus captures thecomplexity of the decision problem to be solved in terms ofthe interactions among the single decisions Hence con-tribution Cit may not only depend on the single choice dit
but also on K other choices
Cit fi dit di1t diKt1113872 1113873 (1)
with i1 iK1113864 1113865 sub 1 i minus 1 i + 1 N In case of nointeractions among choices K equals 0 and K is N minus 1 forthe maximum level of complexity where each single choice iaffects the performance contribution of each other binarychoice jne i +e overall performance Vt achieved in period tresults as normalized sum of contributions Cit from
Vt V dt
rarr1113874 1113875
1N
1113944
N
i1Cit (2)
While this so far captures the key elements of theldquostandardrdquo NK framework a distinguishing feature of themodel presented in this study is thatmdashdue to growthmdashthenumber of single choices to be made by an organization mayincrease over time ie N(t) and with this also the level ofcomplexity may rise ie K(t) Figure 1(b) gives an examplereflecting in the first growth stage a rather small decision-problem with N1 6 and K1 3 in the second stage amedium-sized decision-problem with N2 9 and K2 4growing up to a size N3 12 and K3 5 in the third growthstage More formally we have
N(t)
N1 for 0le tle t1
⋮
Ns for tsminus 1 lt tle ts
⋮
NS for tSminus 1 lt tleT
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎩
(3)
where s (1 S) captures the growth stage and Tdenotesthe entire observation period Correspondingly Ks gives thelevel of complexity in the respective periods of time +eoverall performance (see equation (2)) herewith modifies to
Vt V dt
rarr1113874 1113875
1Ns
1113944
Ns
i1Cit (4)
With this the overall performance is ldquodynamicallyrdquo nor-malized to the problem size Ns moreover in the analysis of thesimulation results the final performance VT 750 is given inrelation to the global maxima of the respective performancelandscapes otherwise the results could not be compared overtime and across different performance landscapes
32Agents and8eirCapabilities Two types of agents residein the organizations
(1) +e distributed (or local) ldquodecision-making agentsrdquo(type 1) which are in primary responsibility of de-cision-making where each of these agents is in chargefor a distinct sub-problem of the overall (growing)decision-problem +ese agents could for examplereflect managers each being the head of a departmentin an organization
(2) Each organization has one central agent (type 2)mdashcapturing for example the headquarter of afirmmdashbeing responsible for
(a) learning-based selection of a mode of co-ordination in every TL-th period
(b) eventuallymdashie subject to the coordinationmode selectedmdashactively intervening in plansynthesis
(c) registering the performance achieved by eachdistributed decision-making agent (see above)and eventually rewarding it accordingly
As familiar in agent-based computational economics(eg [76 77]) the agents captured in the model show someform of bounded rationality [19] In particular both types ofagents ie distributed decision-making agents and head-quarter are assumed to decide on basis of bounded in-formation in terms of not knowing the entire search spaceand having limited computational power [78ndash80] Hencealthough distributed decision-makers are self-interestedpursuing their particular goals and in a similar vein thecentral agent seeks to maximize overall performance(equation (4)) the agents are not optimizers but conductstepwise search processes in terms of neighborhood searchMoreover the agents are not able to perfectly evaluate newlyfound options to their respective decision-problems
+e properties of the distributed decision-making agents(type 1) are described more precisely in Section 33 while thecentral agent (type 2) is depicted more in detail in Sections34 and 35
33 Distributed Decision-Making Agentsrsquo Search andFormation of Preferences
331 Decomposition and Delegation +e Ns-dimensionaldecision problem is partitioned into Ms disjoint partialproblems of for the sake of simplicity equal size Nr
s Each ofthese sub-problems is delegated to one distributed decision-maker r (ie one agent of type 1)mdashwith particular com-petencies of decision-maker r related to the respective sub-problem being subject to the mode of coordinationimplemented at that time However the distributed de-cision-makers are at least preparing choices regarding theirpartition of the overall Ns-dimensional decision-problem ineach period t (ie depicting ldquounthreaded planningrdquo fromMAS see Section 23)
+e growth processes in the problem space are reflectedin the number of distributed decision-makers (type 1) ac-cordingly More formally we have the number of distributeddecision-makers being a function of time ie Ms(t) and ateach given growth stage s the scope of competencies of the
Complexity 5
distributed decision-makers are of equal size in terms ofnumber of single choices Nr
s assigned to them (see forexample the shaded areas in Figure 1)
332 Search Strategies In the model as mentioned abovedistributed decision-makers are not able to survey the entiresearch space of their decision-problem and hence they arenot able to ldquolocaterdquo the optimal solution of their partialdecision problem ldquoat oncerdquo rather they search stepwise forsuperior solutions In each time step t distributed decision-
maker r considers two alternative solutions dra1t
rarrand d
ra2t
rarrfor
its partial decision-problem compared to the status quo drlowasttminus 1
rarr
With this in each of the search strategies modeled and inevery time step decision-maker r has three options to choosefrommdashincluding staying with the status quo
However the model captures thatmdashas a part of theboundary system in the MCSmdashsome boundaries related to
the distances of the two alternatives dra1t
rarrand d
ra2t
rarrcompared
to the status quo are set and enforced by the central unit(type 2 agent) In particular the boundary system enforcessearch strategies being of an exploitative explorative orambidextrous nature [20 58 81] and accordingly the modelcomprises the following three search strategies
(i) ldquoexploitation onlyrdquo both alternatives dra1t
rarrand d
ra2t
rarr
discovered by distributed decision-maker r differ from
the status quo drlowasttminus 1
rarrby one digit respectively Hence
the Hamming distance h(dra1
rarr) 1113936
Nr
i1|drlowasttminus 1
rarrminus d
ra1t
rarr|
of the first alternative to the status quo equals 1 as wellas is the case for the second alternative (ie
h(dra2
rarr) 1)
(ii) ldquoexploitation and explorationrdquo the local decision-makers are allowed to alternatively consider anoption with one bit flipped and another where two
1 2 3 4 5 6 1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8 9 10 11 121 X X X ndash ndash ndash 1 X X X ndash ndash ndash ndash ndash ndash 1 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash2 X X X ndash ndash ndash 2 X X X ndash ndash ndash ndash ndash ndash 2 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash3 X X X ndash ndash ndash 3 X X X ndash ndash ndash ndash ndash ndash 3 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash4 ndash ndash ndash X X X 4 ndash ndash ndash X X X ndash ndash ndash 4 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash5 ndash ndash ndash X X X 5 ndash ndash ndash X X X ndash ndash ndash 5 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash6 ndash ndash ndash X X X 6 ndash ndash ndash X X X ndash ndash ndash 6 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash
7 ndash ndash ndash ndash ndash ndash X X X 7 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash8 ndash ndash ndash ndash ndash ndash X X X 8 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash9 ndash ndash ndash ndash ndash ndash X X X 9 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash
10 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X11 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X12 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X
Choi
ce d
iD
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M D
Dec
M
Growth stage s = 1 (N1 = 6 K1 = 2 K1ex = 0)
Performance contribution Cj
Growth stage s = 2 (N2 = 9 K2 = 2 K2ex = 0)
Performance contribution Cj
Growth stage s = 3 (N3 = 12 K3 = 2 K3ex = 0)
Performance contribution Cj
Scope of primary control of distributed decision maker r (type 1 agent)X Choice i affects performance contribution jndash Choice i does not affect performance contribution j
Distributed decision maker (type 1 agent)DDecM
(a)
1 2 3 4 5 6 1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8 9 10 11 121 X X X ndash ndash X 1 X X X ndash ndash X X ndash ndash 1 X X X ndash ndash X X ndash ndash ndash ndash X2 X X X ndash X ndash 2 X X X ndash X ndash ndash X ndash 2 X X X ndash X ndash ndash X ndash ndash X ndash3 X X X X ndash ndash 3 X X X X ndash ndash ndash ndash ndash 3 X X X X ndash ndash ndash ndash ndash X ndash ndash4 X ndash ndash X X X 4 X ndash ndash X X X X ndash X 4 X ndash ndash X X X X ndash X ndash ndash X5 ndash X ndash X X X 5 ndash X ndash X X X ndash X ndash 5 ndash X ndash X X X ndash X ndash ndash X ndash6 ndash ndash X X X X 6 ndash ndash X X X X ndash ndash X 6 ndash ndash X X X X ndash ndash X X ndash ndash
7 ndash X ndash ndash ndash X X X X 7 ndash X ndash ndash ndash X X X X ndash ndash X8 ndash ndash X ndash X ndash X X X 8 ndash ndash X ndash X ndash X X X ndash X ndash9 X ndash ndash X ndash ndash X X X 9 X ndash ndash X ndash ndash X X X X ndash ndash
10 ndash X ndash X ndash ndash ndash X ndash X X X11 ndash ndash X ndash X ndash X ndash ndash X X X12 X ndash ndash ndash ndash X ndash ndash X X X X
Choi
ce d
iD
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M
Growth stage s = 1 (N1 = 6 K1 = 3 K1ex = 1)
Performance contribution Cj
Growth stage s = 2 (N2 = 9 K2 = 4 K2ex = 2)
Performance contribution Cj
Growth stage s = 3 (N3 = 12 K3 = 5 K3ex = 3)
Performance contribution Cj
Scope of primary control of distributed decision maker r (type 1 agent)X Choice i affects performance contribution jndash Choice i does not affect performance contribution j
Distributed decision maker (type 1 agent)DDecM
(b)
Figure 1 Interaction structures and growth stages in the simulation experiments (a) decomposable and (b) nondecomposable
6 Complexity
digits are altered ie the Hamming distances are
h(dra1
rarr) 1 and h(d
ra2rarr
) 2(iii) ldquoexploration onlyrdquo in each of both alternatives d
ra1t
rarr
and dra2t
rarr two bits are flipped compared to the status
quo drlowasttminus 1
rarr ie we have h(d
ra1rarr
) 2 and h(dra2
rarr) 2
333 Distributed Decision-Makersrsquo Objectives and Cost ofEffort Each local decision-maker r r 1 Ms pursuesits ldquoownrdquo objective (ie related to its respective sub-prob-lem) In particular each distributed decision-maker seeks to
identify that option drt
rarrout of d
rlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrwhich
promises the highest net performance Ar ie the highestdifference between partial performance Pr
tmdashresulting fromthe contributions Cit of those particular single choicesassigned to decision-maker rmdashand the related cost of efforts
for implementing drt
rarr
Art d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (5)
where the partial performance Prt (d
rt
rarr) of decision-maker rrsquos
contribution to overall performance Vt (see equation (4)) isgiven by
Prt d
rt
rarr1113874 1113875
1N
1113944
Nrs
i1+w
Cit (6)
with w 1113936rminus 1p1N
ps for rgt 1 and w 0 for r 1
In case of interactions across the sub-problems capturedby Kex
s gt 0 choices of decision-maker r might affect thecontribution of the other decision-makersrsquo qnep choices onqrsquos parochial performance and vice versa
In the model the number of single choices altered in
terms of the Hamming distance h(drlowasttminus 1
rarr d
rt
rarr) to the status quo
(ie the number of bits flipped) is regarded as the effort to betaken by decision-maker r in order to implement an optionWith this the possible range of effort is shaped by the searchstrategy as introduced in Section 332 the lower bound forthe effort in all three search strategies equals 0 for the case
that the status quo drlowasttminus 1
rarris chosen to be kept the upper bound
is 1 in the ldquoexploitation onlyrdquo and equals 2 in the ldquoexplo-ration onlyrdquo as well as in the ambidextrous strategy
For modeling the cost of effort as customary in eco-nomics (eg [82 83]) it is assumed that higher levels ofeffort are increasingly costly Hence for distributed de-cision-maker rrsquos cost of effort Zr we have Zr(h)prime gt 0 and
Zr(h)Prime gt 0 In particular the cost of effort Zr(drt
rarr) of de-
cision-maker r is modeled to be quadratically increasingwith the Hamming distance h to the status quo ie
Zrt d
rt
rarr1113874 1113875 z
rmiddot h d
rlowasttminus 1
rarr d
rt
rarr1113874 11138751113874 1113875
2 (7)
where zr is a cost coefficient For the sake of simplicity in thesimulation experiments the cost coefficient is the same for
every decision-makers r and does not change over time Forthis reason subsequently the index r indicating on a de-cision-maker r is skipped when addressing the cost co-efficient (considering decision-makers which areheterogeneous in respect to their cost functions (as it couldbe captured by different cost coefficients zr) would be anatural extension of the research effort presented here)
334 Evaluation of Options When evaluating their optionsthe decentralized decision-makers suffer from two types oflimited information First without eventual further com-munication prescribed by the coordination mechanism (seeSection 34) decision-maker r is not able to anticipate theother decision-makersrsquo qne r choices and thus assumes thatthey will stay with the status quo ie that they will opt for
dqlowasttminus 1
rarr(for this see also [84]) +is is particularly relevant in
case of inter-sub-problem interdependencies when otherlocal decision-makersrsquo actions may affect performance ofdecision-maker r
Second decentralized decision-makers are not able toperfectly ex-ante evaluate their newly discovered optionsrsquo
dra1t
rarrand d
ra2t
rarreffects on their partial performance Pr
t (drt
rarr)
(see equation (6)) Rather the ex-ante evaluation is afflictedwith some noise In particular for the sake of simplicity adecision-maker rrsquos perceived partial performance ( 1113957Pr) isdistorted by a relative error imputed to the true perfor-mance With this our local decision-makers search on noisypartial performance landscapes (for further types of errorssee [85]) +e error terms follow a Gaussian distributionN(0 σ) with expected value 0 and standard deviations σr forevery decision-maker r errors are assumed to be in-dependent from each other Hence the perceived perfor-mance 1113957Pr
t (dt
rarr) of distributed decision-maker r is given by
1113957Prt d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 + e
rd
rt
rarr1113874 1113875 (8)
and the objective function in equation (5) modifies to
1113958Art d
rt
rarr1113874 1113875 1113957Pr
t drt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (9)
With equation (8) each distributed decision-maker r has adistinct partial and distorted ldquoviewrdquo of the true fitnesslandscape each decision-maker r is exclusively in charge ofan ldquoownrdquo part of the entireN-dimensional decision-problemas it is shaped in the current growth stage and imperfectlyestimates the performance contributions of newly discov-ered options +us at a given growth stage the modelcaptures Ms + 1 heterogeneous (distorted) views of the truelandscape ie one view per local decision-makerr 1 Ms plus a headquartersrsquo perspective (for the lattersee Section 343)
However for the status quo option we assume that eachdecision-maker r remembers the performance obtainedfrom the last period and with this knows the actual per-formance Pr
tminus 1 of the status quo should it be implemented inperiod t again
Complexity 7
Based on the evaluation of options each decision-maker
r compiles a list Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 of preferences
where drp1t
rarrindicates the most preferred option out of
drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarr Correspondingly d
rp2t
rarrdenotes the
second-most and drp3t
rarrthe third-most preferred option
34CoordinationModes for SynthesizingPlans As a result ofthe search and (imperfect) evaluation of options so far eachdistributed decision-maker has an ordered list Lr
t of pref-erences which in terms of multiagent systems reflects theindividual [2] or local plan [69] +e next step within eachperiod t is to come to a decision on the organizationrsquos overallproblem dt
rarr ie to merge the decentralized decision-makersrsquo
preferences on drt
rarrcaptured in the Ms lists Lr
t into the overallconfiguration dt
rarr +is requires to employ a mode of co-
ordination for synthesizing the local plansmdashand the verycore of this paper is to study which mode emerges underwhich conditions of search strategy and cost of effort
As it was outlined in Section 2 a multitude of modes forsynthesizing local plans has been proposed in various do-mains Out of the numerous feasible mechanisms the modelcomprises three modes which could represent particularpronounced (for not to say ldquoextremerdquo) forms of co-ordination regarding
(i) (de-)centralization in terms of (locus of) authority(ii) direction of alignment ie lateral vs vertical(iii) parallelization vs sequencing of final decision re-
garding the local plans
In particular the three types of coordination captured inthe model (see Table 1) differ in the communicationchannels (the model assumes that communication in thecourse of coordination works perfectly for an investigationof the effects of unintended communications errors see[86]) the information employed in decision-making thelocus of final decision-making and in the end the tightnessof coordination provided (for an overview and furthermodes see eg [2 57 69 87 88])
341 Decentralized Mode +e highest level of autonomy isgranted to the Ms distributed decision-makers if each ofthem is allowed to choose its most preferred option +enthe overall organizational configuration dt
rarrresults from
dt
rarr d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr1113874 1113875 (10)
Hence for decision-maker rrsquos partial decision problemNr
s the option according to
drlowastt
rarr d
rp1t
rarrforallr isin 1 Ms1113864 1113865 (11)
is implemented Obviously this type of coordination doesnot require any form of communication between thedecentralized decision-makers or with the headquarter(central agent) +e headquarter does not intervene in de-cision-making directly and its role is limited to registering
the achieved performances Vt(dt
rarr) and Pr
t (drt
rarr) in the end of
each period t and eventually to reward the decentralizeddecision-makers accordingly
342 Sequential Mode +is mode captures the idea ofldquosequential planningrdquo +e distributed decision-makersmake their final choices sequentially with for the sake ofsimplicity the sequence being given by the index r of thedecision-makers In particular in time step t decision-makerr minus 1 informs decision-maker r with 1lt rleMs about thechoices made so far ie made by the ldquoprecedingrdquo decision-makers lt r Decision-maker rgt 1 re-evaluates its ldquoownrdquo
options drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrtaking these ldquopriorrdquo choices into
accountmdashpotentially resulting in an adjusted list of pref-
erences Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 and chooses d
rp1t
rarrwhich
here depends on drminus 1p1t
rarr ie is a function of the choices of
the preceding decision-makers Hence only decision-maker1 does not have to consider previous choices and the choiceof decision-maker r (1 Ms) is made according to
drlowastt
rarr
drp1t
rarr if r 1
drp1t
rarrd
rminus 1p1t
rarr1113874 1113875 if 1lt rleΜ
⎧⎪⎪⎨
⎪⎪⎩(12)
and with equation (12) the overall configuration is given by
dt
rarr d
Mlowastt
rarr+e headquarter (type 2 agent) does not intervene
in decision-making andmdashsimilar to the decentralizedmodemdashis confined to observing the performances achievedand eventually rewarding the decentralized decision-makers accordingly
343 Proposal Mode Each local decision-maker transfersits list Lr
t of preferences to the headquarter which compilesthe first preferences to a composite vector
dC
rarr (d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr) and then evaluates the
overall performance V(dC
rarr) (see equation (4)) that this
solution promisesHowever as with decentralized decision-makers in the
model it is assumed that the headquarter is not capable toperfectly ex-ante evaluate new options ie other solutionsthan the status quo (see Section 32) Rather similar to thelocal decision-makers the headquarter suffers from somerelative noise following a Gaussian distribution with ex-pected value 0 and standard deviations σcent resulting in a
perceived overall performance 1113957V(dC
rarr) +e headquarter
8 Complexity
decides in favor of the composite vector ie dt
rarr d
Crarr
if dC
rarr
promises the same or a higher performance as the status quodtminus 1rarr
ie if
1113957V dC
rarr1113888 1113889geV d
lowasttminus 1
rarr1113874 1113875 (13)
If the composite vector dC
rarrassembled from the local
decision-makersrsquo first preferences does not meet the con-dition in equation (13) the headquarter evaluates a vectorcomposed from the decentralized decision-makersrsquo secondpreferences according to equation (13) If this also does notat least promise the performance of the status quo then theorganization stays with the status quo ie then dt
rarr dtminus 1
rarr
35 Learning-Based Adaptation of Coordination +e verycore of this research endeavor is to study which modes ofcoordination emerge within growth processes of the artificialorganizations In order to capture some kind of self-adap-tation of coordination the model employs a simple mode ofreinforcement learning (for overviews see [89 90]) based onstatistical learning ie a generalized form of the BushndashMosteller model [91 92]
+is mode of learning is chosen for the following rea-sons In the vast multitude of forms of learning studied invarious domains (eg psychology economics and com-puter science) reinforcement learning is regarded to beamong the most basic forms of learning [92] It represents afundamental possible form of humansrsquo behavior but alsoprovides some basis for learning of artificial agents [90]mdashboth regarded as DDMS in this paper Moreover in thismodel as a form of experiential learning the mid-termedreinforcement learning on the coordination mode corre-sponds to the experiential type of short-termed adaptation[60] when the decision-making systems in every single time-step search for a superior solution compared to the statusquo However it would be a natural extension of the modelto let the DDMS employ other and in particular more
advanced forms of learning about which mode of co-ordination is appropriate within the stage of growth and forthe search strategy employed and the cost of effort
In the model reinforcement learning on coordination forsynthesizing local plans is represented in the following way Inthe end of each time step t the central agent (type 2 agent seeSection 32) receives information about the overall perfor-mance Vt according to equation (4) +is allows the centralagent in every TLth period to compute the performanceenhancements achieved within the last TL periods Moreoverin every TLth period the organizations can alter the type ofcoordination mode as introduced in Section 34 Hence ourDDMS face the mid-termed decision-problem which type ofcoordination mode ac(t) isin Ac (with |Ac| 3 see Section 34)to implement in the next TL periods Let p(ac t) denote theprobability of an alternative ac(t) to be chosen at time t (with0lep(ac t)le 1 and 1113936aacisinAc (p(ac t)) 1)
+e key idea of reinforcement learning is that theprobabilities of options are updated according to the positiveor negative stimuli resulting from these options In ourcontext whether the performance enhancement ΔVt ob-tained under the regime of a certain mode of coordinationac(t) in the previous TL periods is regarded positive ornegative depends on whether or not it at least equals anaspiration level v ΔVt of type ac(t) of coordination is de-fined as the relative performance enhancement achievedwithin the last TL periods of the adaptive walk ie
ΔVt Vt minus Vtminus TL
Vtminus TL
(14)
Hence the stimulus τ(t) is
τ(t) 1 if ΔVt ge v
minus 1 if ΔVt lt v1113896 (15)
+e probabilities of options ac isin Ac are updatedaccording to the following rule with λ (where 0le λle 1)giving the reinforcement strength [92]
Table 1 Overview of the modes of coordination in the model
Type of coordination modeDecentralized Sequential Proposal
Lateral communication No Yes NoVertical communication No No YesHeadquarter intervening No No YesRe-evaluation of local plans No Yes Yes
Information employed for finaldecisions
Expected parochialperformance
Expected parochial performancetaking predecessorrsquos choices into
account
Expected organization-wideaggregated performance
Locus of final decisions on localplans Decentralized Decentralized Centralized
Temporal order of final decisionson local plans In parallel Asynchronously (in sequence) Synchronously (ldquoat oncerdquo)
Final configurations for distributeddecision-makersrsquo sub-problems
First preferences
drp1t
rarrforallr isin 1 Ms1113864 1113865
First preferences subject topreceding decision-makersrsquo
choices ie drp1t
rarr(d
rminus 1p1t
rarr) for rgt 1
drp1t
rarrfor r 1
First (or second) preferences drp1t
rarr
[or drp2t
rarr] if 1113957V(d
Crarr
)geV(dtminus 1rarr
)
Complexity 9
p ac t + 1( 1113857 p a
c t( 1113857 + λ middot
1 minus p ac t( )( 1113857 if ac ac(t)and τ(t) 1
minus p ac t( ) if ac ac(t)and τ(t) minus 1
minus p ac t( ) if ac ne ac(t)and τ(t) 1
p ac t( ) middot p ac(t) t( )
1 minus p ac(t) t( ) if ac ne ac(t)and τ(t) minus 1
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(16)
After the probabilities are updated as given in equation(16) the ldquonextrdquo mode of coordination to be employed fromt + 1 to t + TL is determined at randommdashaccording to theupdated probabilities
4 Simulation Experiments ProcessualStructure Parameters and Analysis
+is section is intended to introduce the principle structureof the simulation experiments based on the theoreticalmodel as presented in the previous Section 3 For this firstSection 41 gives an overview of the principle processualstructure of the simulations before the parameters settingsare motivated (Section 42) and the metrics employed foranalysis of experiments are introduced (Section 43)
41 Process Overview of the Simulation Model Figure 2depicts the principle processual structure of the simula-tion model based on the theoretical model as introduced inthe previous Section 3 In particular the simulation in itscore is characterized by three loops capturing three temporalhorizons
In the short term in each time step t the artificial or-ganizations search for superior solutions of their Ns-di-mensional decision-problem where the overall problem issegmented into Ms sub-problems with each delegated to Ms
local decision-making agents accordingly (type 1 agents inSection 32) In the mid-term ie in each TLth time step thecentral unit (type 2 agent) evaluates the current mode ofcoordination learns from this evaluation via reinforcementand eventually chooses another mode of coordination forthe next TL periods In the long term in every TGth timestep the decision-problem grows by a fixed number Nr
s ofadditional single choices to be made and the number Ms ofdistributed decision-makers increases by 1 (for details seeSection 31)
42 Parameter Settings
421 Parameters Fixed for all Experiments In the simula-tion experimentsmdashparameter settings are listed inTable 2mdashorganizations are observed over T 750 periodswhere in every TL 10th period eventually the mode ofcoordination is switched (the observation period T and thelearning interval TL 10 were fixed based on pretests whichindicate that the results do not principally change when theorganizations are observed for a longer time the similar
holds for an extension of the learning interval (eg toTL 20) however shortening the learning period notablybelow 10 periods does not leave the different coordinationmodes ldquoenough timerdquo to unfold their particular potentialwith respect to the aspiration level)
In every TG 250th period the organizations undergo agrowth in problem space as well as in the number of dis-tributed decision-makers
(i) In their first growth stage the organizations face anNs1 6-dimensional overall decision-problemdecomposed into two sub-problems of equal size(ie Nr
s1 3forallr isin 1 2 ) assigned to two decision-makers (Ms1 2) accordingly
(ii) In the second growth stage (ie fromt 251 to 500) three additional binary choices areto be made by the organizations for which oneadditional local decision-maker is responsi-blemdashhence the organizations comprise 3 decen-tralized decision-makers ie Ms2 3
(iii) In the third stage the decision-problem grows bythree further binary choices and hence finally theorganizations deal with an Ns3 12-dimensionalproblem and a fourth decentralized decision-makercomes into play (Ms3 4)
+e simulations are run for a moderate level of noisecaptured by parameters σr and σcent relevant for the ex-anteevaluations of options by the local decision-makers and incase of the proposal mode the central agent respectively (seeSections 32 and 343) It is assumed that the information ofthe local decision-makersmdashonly related to their respectiveNr-dimensional sub-problemsmdashare more precise than theinformation of the central unit which is related to the entireNs-dimensional decision problem (ie σr lt σcent) +is isintended to capture differentiation and specialization [8 93]due to division of labor Some empirical evidence suggeststhat noise of about 10 of the true value in the domain ofmanagement control is at a reasonable range [94]
+e modes of coordination which the organizationschoose of are motivated and introduced in Section 34 +eorganizations employ the same initial mode of coordinationnamely the ldquodecentralizedrdquo mode +is ldquosetuprdquo procedure ischosen to make sure that the adaptive processes start from aldquodefinedrdquo initial configuration and without having thelearning processes overlaid by the strong performance en-hancements that are typically made in the very first periodsof the adaptive walks (notwithstanding further simulations
10 Complexity
have shown that the overlaying effects appear to be rathernegligible) However an intuitive ldquostoryrdquo behind this setupprocedure is that the organizations start in fact without any
particular mode of coordination ie the decentralizedmode(for example because they were newly founded) and keepthis until time t 10 in this period they ldquodiscoverrdquo the two
Yes
No
Yes No
Yes No
No
Yes
Decrease of propensities of current mode of coordination to be chosen for the next TL
periods (and increase of propensities of others)
Determination of mode of coordination implemented in the next TL periods according to updated propensities
Central agent evaluates performance enhancement achievedwith the current mode of coordination in the last TL periods
Time step t = 0 growth stage s = 1number of distributed decision-making agents MS=1 = 2
Generation of a performance landscape according to the interaction structureat the first growth stage
Random-driven determination of the initial configuration dt=0 of the overalldecision-problem
Extension of performance landscape according to the interaction structure at the ldquonewrdquo growth stage s increase of number of distributed decision-making
agents by 1 ie MS = MS + 1
t = t + 1
Growth stage s = s + 1
Each distributed decision-maker r discovers alternatives a1 and a2 to the statusquo of the partial problem which is delegated to this decision-maker r
and forms its preferences (local plans)
Overall configuration dt is determined from the local plans according to the current mode of coordination
Central agent determines performance Vt obtained with configuration dt
Increase of propensities of current mode ofcoordination to be chosen for the next TL periods
(and decrease of propensities of others)
t mod TL = 0
t mod TG = 0
Positive feedback
t gt T Stop
Start
Figure 2 Principle processual structure of the simulation model
Complexity 11
alternative modes and choose randomly one option ac isin Ac
out of the three options (ie |Ac| 3) where each mode hasthe same initial probability 1|Ac| +en in every TL 10thperiod probabilities are adjusted according to the perfor-mance enhancements +e parameters for learning corre-spond to a moderate strength of learning [95] On basis ofthe updated probabilities eventually a new coordinationmode is established
422 Contingency Factors Parameters Subject to Variationacross Experiments As argued in the Introduction thisresearch effort takes a contingency perspective and inparticular intends to study the interacting effects of (1)complexity of decision-problem (2) search strategy and (3)cost of effort Accordingly these three contingent factors aresubject to variation across simulation experiments (see alsothe lower part in Table 2)
(1) Complexity of Decision-Problem In line with the idea offactorial design of simulation experiments [96] the exper-iments distinguish between two different levels of
complexity of the decision problem to be solved by theorganizations which capture two rather pronounced cases
Based on the seminal work of Simon [16] on the ar-chitecture of complexity (near) decomposability as com-pared to nondecomposability is the key aspect in theunderstanding of complexity (see also Introduction)Against this background the simulations are run for agrowing decomposable and a growing nondecomposableinteraction structure where the principle ldquotyperdquo of com-plexity is kept over the growth stages Hence the growthprocesses simulated may capture some kind of organicgrowth [97ndash99] Figure 1 provides a graphical representationof interaction matrices of the growing decision-problemswhich could capture the following situations (in the sim-ulation experiments the number of decision-makers mirrorsthe growth of the decision-problem for avoiding interferencewith effects of varying size of decision-makersrsquo scope ofcompetency (for further references see [55 100 101]))
(i) ldquodecomposablerdquo (Figure 1(a)) +is type of organi-zation and growth relates to the idea of an organi-zation consisting of self-contained ldquosub-problemsrdquo
Table 2 Parameter settings
Parameter ValuestypesParameters fixed for all experiments (see Section 421)Observation period T 750Interval of learning TL 10Interval of growth stages TG 250Growth stages s 1 2 3
Number of choicesIn growth stage s 1 Ns1 6In growth stage s 2 Ns2 9In growth stage s 3 Ns3 12
Number Ms of distributed decision-makers
In growth stage s 1 M1 2 distributed
decision-makers with sub-problems d1
rarr (d1 d2 d3)
and d2
rarr (d4 d5 d6)
In growth stage s 2 M2 3 ie one additional
distributed decision-maker 3 with sub-problem d3
rarr
(d7 d8 d9)
In growth stage s 3 M3 4 ie one furtheradditional decision-maker 4 with sub-problem
d4
rarr (d10 d11 d12)
Precision of ex-ante evaluation Distributed decision-makers σr 005forallrCentral agent (headquarter) σcent 01
Modes of coordination ac isin Ac ldquodecentralized rdquo ldquosequential rdquo ldquoproposalrdquo1113864 1113865
Aspiration level v 0Learning strength λ 05Parameters subject to variation across experiments (see Section 422)
Complexity of decision problem ldquoDecomposablerdquo ldquonondecomposablerdquofor details of interaction structures see Figure 1
Search strategy
ldquoExploitation onlyrdquo h(dra1
rarr) 1 and h(d
ra2rarr
) 1
ldquoExploitation and explorationrdquo h(dra1
rarr) 1 and
h(dra2
rarr) 2
ldquoExploration onlyrdquo h(dra1
rarr) 2 and h(d
ra2rarr
) 2
Cost of effort (cost coefficient) Baseline scenarios z 0001Sensitivity analysis z isin 0 0003 0005 001 002
12 Complexity
or ldquounitsrdquo [7 8] which have intense intra-unit in-teractions but no cross-unit interactions In the be-ginning the organizationrsquos overall decision-problemis decomposable into 2 distinct sub-problems [17]which for example might be related to differentproducts without any interrelations between themFor the 2 products 2 business units are responsible Inthe course of the growth stages the organizationldquoaddsrdquo further products and business units corre-spondingly without interrelations among the ldquooldrdquoand ldquonewrdquo products and accordingly the units
(ii) ldquonondecomposablerdquo (example given in Figure 1(b))+is case of interactionsmay capture whatmdashaccordingto the prominent classification of +ompson [7]mdashiscalled reciprocal interdependencies In particular thisstructure could represent an organization with func-tional specialization showing the typical high level ofinterrelations between sub-problemsmdashand de-partments accordingly In the course of growth it maybe that the vertical integration is increased (egestablishing an inhouse production of certain in-termediate products or sales logistics)
(2) Search Strategy As described in Section 332 thedecentralized decision-makers employ one of three funda-mental search strategies which are intended to capture ex-ploitation exploration and an ambidextrous strategy [20] asenforced by the boundary systemmdasheach characterized by thenumber of options and the Hamming distances allowed Forexample if an exploration strategy is pursued with M3 4local decision-makers and N3 12 in the final growth stageat maximum 8 digits of the overall decision-problem couldbe flipped ie two-thirds of the configuration dt
rarrcould be
altered in one time step
(3) Cost of Effort While the search strategy shapes themaximum of binary choices that could be flipped the actualalterations are affected by the local decision-makersrsquo pref-erences together with the coordination mode employedAccording to equations (7) and (9) in Section 3 the dis-tributed decision-makersrsquo preferences are affected by thecost of effort and in particular by cost coefficient z
However in order to be clear and concise the simulationexperiments are conducted in two steps First to gain a basicunderstanding of the emergence of coordination in thebaseline scenarios the cost of effort is at a moderate levelz 0001 for all local decision-makers Second a sensitivityanalysis is conducted in whose course the cost of effort isvaried from costless effort (ie z 0) to higher levels of costof effort (ie zgt 0001) in order to analyze the effects of costof effort on the emergence of coordination
43 Metrics Employed for Analysis of Simulations In thebaseline scenarios with 2 interaction structures and 3 searchstrategies under investigation at a given level of cost of effort6 different scenarios of parameters are simulated For thesensitivity analysis 5 additional levels of cost of effort are
simulated which results in 30 further scenarios For each ofin sum the 36 scenarios 2500 simulations are run with 10runs on 250 performance landscapes
+e research question of this paper boils down to thequestion which coordination modes emerge predominantlyfor which contingencies in terms of complexity searchstrategy and cost of effort Hence for answering this questionthe key metric is the relative frequencies of the coordinationmodes in the end of the observation period t 750
Moreover the relative frequencies of coordinationmodes over observation time are depicted +is allows togain an understanding of how their relative shares evolve inthe course of growth and learning
As described in Section 35 the propensities to opt for theone or the other mode of coordination is shaped by theperformance gains achieved under the current mode in thelast TL periods Hence the level of performance according toequations (2) and (4) respectively in Section 31 ie the finalperformance achieved at the end of the observation period forthe different coordination modes is of interest For this the2500 simulations for each scenario were grouped accordingto that mode of coordination which was ldquoactiverdquo (ie hasemerged) in the last period t 750 of the observation time
+ese subgroups were analyzed individually and inparticular the mean of the final performance Vt750 achievedfor each coordination mode selected at t 750 is computed aswell as the respective confidence interval at a 999 level ofconfidence
Moreover another metric informing about the effec-tiveness of the search processes is the relative frequency of theglobal maximum found in t 750 of the respective per-formance landscape which is computed for each subgroup(based on the coordination mode in t 750) separately
In order to gain some deeper understanding of the searchprocesses conducted by the DDMS two further metrics wereobserved and analyzed for each subgroup the ratio of periods inwhich the status quo is altered and the ratio of periods with false-positive alterations ie alterations in favor of a false-positiveoption (ie reducing Vt) to the T 750 periods of observation+ese metrics put some focus on the efficiency of search
5 Results and Discussion
+e results are presented in two steps First for gaining a basicunderstanding of the effects of intraorganizational complexityand search strategy on the emergence of coordination thebaseline scenarios are presented and analyzed (Section 51)While in the baseline scenarios the distributed decision-makers operate at a rather moderate though nonzero level ofcost of effort the sensitivity analysis (Section 52) illustrates theeffect of cost of effort at the local decision-makersrsquo side on thecoordination mode emerging at the systemrsquos level
51 Complexity and Search Strategy Baseline Scenarios
511 Overview For the baseline scenarios Table 3 displayscondensed results obtained from the simulation experimentsaccording to the metrics introduced in Section 43 In ad-dition Table 4 reports on the significances of mean
Complexity 13
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Each of the two states dit isin 0 1 provides a contribution Cit
to the overall performance V(dt
rarr) where the Cit are ran-
domly drawn from a uniform distribution with 0leCit le 1+e parameter K (with 0leKleN minus 1) reflects the number ofthose choices djt jne i which also affect the performancecontribution Cit of choice dit and thus captures thecomplexity of the decision problem to be solved in terms ofthe interactions among the single decisions Hence con-tribution Cit may not only depend on the single choice dit
but also on K other choices
Cit fi dit di1t diKt1113872 1113873 (1)
with i1 iK1113864 1113865 sub 1 i minus 1 i + 1 N In case of nointeractions among choices K equals 0 and K is N minus 1 forthe maximum level of complexity where each single choice iaffects the performance contribution of each other binarychoice jne i +e overall performance Vt achieved in period tresults as normalized sum of contributions Cit from
Vt V dt
rarr1113874 1113875
1N
1113944
N
i1Cit (2)
While this so far captures the key elements of theldquostandardrdquo NK framework a distinguishing feature of themodel presented in this study is thatmdashdue to growthmdashthenumber of single choices to be made by an organization mayincrease over time ie N(t) and with this also the level ofcomplexity may rise ie K(t) Figure 1(b) gives an examplereflecting in the first growth stage a rather small decision-problem with N1 6 and K1 3 in the second stage amedium-sized decision-problem with N2 9 and K2 4growing up to a size N3 12 and K3 5 in the third growthstage More formally we have
N(t)
N1 for 0le tle t1
⋮
Ns for tsminus 1 lt tle ts
⋮
NS for tSminus 1 lt tleT
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎩
(3)
where s (1 S) captures the growth stage and Tdenotesthe entire observation period Correspondingly Ks gives thelevel of complexity in the respective periods of time +eoverall performance (see equation (2)) herewith modifies to
Vt V dt
rarr1113874 1113875
1Ns
1113944
Ns
i1Cit (4)
With this the overall performance is ldquodynamicallyrdquo nor-malized to the problem size Ns moreover in the analysis of thesimulation results the final performance VT 750 is given inrelation to the global maxima of the respective performancelandscapes otherwise the results could not be compared overtime and across different performance landscapes
32Agents and8eirCapabilities Two types of agents residein the organizations
(1) +e distributed (or local) ldquodecision-making agentsrdquo(type 1) which are in primary responsibility of de-cision-making where each of these agents is in chargefor a distinct sub-problem of the overall (growing)decision-problem +ese agents could for examplereflect managers each being the head of a departmentin an organization
(2) Each organization has one central agent (type 2)mdashcapturing for example the headquarter of afirmmdashbeing responsible for
(a) learning-based selection of a mode of co-ordination in every TL-th period
(b) eventuallymdashie subject to the coordinationmode selectedmdashactively intervening in plansynthesis
(c) registering the performance achieved by eachdistributed decision-making agent (see above)and eventually rewarding it accordingly
As familiar in agent-based computational economics(eg [76 77]) the agents captured in the model show someform of bounded rationality [19] In particular both types ofagents ie distributed decision-making agents and head-quarter are assumed to decide on basis of bounded in-formation in terms of not knowing the entire search spaceand having limited computational power [78ndash80] Hencealthough distributed decision-makers are self-interestedpursuing their particular goals and in a similar vein thecentral agent seeks to maximize overall performance(equation (4)) the agents are not optimizers but conductstepwise search processes in terms of neighborhood searchMoreover the agents are not able to perfectly evaluate newlyfound options to their respective decision-problems
+e properties of the distributed decision-making agents(type 1) are described more precisely in Section 33 while thecentral agent (type 2) is depicted more in detail in Sections34 and 35
33 Distributed Decision-Making Agentsrsquo Search andFormation of Preferences
331 Decomposition and Delegation +e Ns-dimensionaldecision problem is partitioned into Ms disjoint partialproblems of for the sake of simplicity equal size Nr
s Each ofthese sub-problems is delegated to one distributed decision-maker r (ie one agent of type 1)mdashwith particular com-petencies of decision-maker r related to the respective sub-problem being subject to the mode of coordinationimplemented at that time However the distributed de-cision-makers are at least preparing choices regarding theirpartition of the overall Ns-dimensional decision-problem ineach period t (ie depicting ldquounthreaded planningrdquo fromMAS see Section 23)
+e growth processes in the problem space are reflectedin the number of distributed decision-makers (type 1) ac-cordingly More formally we have the number of distributeddecision-makers being a function of time ie Ms(t) and ateach given growth stage s the scope of competencies of the
Complexity 5
distributed decision-makers are of equal size in terms ofnumber of single choices Nr
s assigned to them (see forexample the shaded areas in Figure 1)
332 Search Strategies In the model as mentioned abovedistributed decision-makers are not able to survey the entiresearch space of their decision-problem and hence they arenot able to ldquolocaterdquo the optimal solution of their partialdecision problem ldquoat oncerdquo rather they search stepwise forsuperior solutions In each time step t distributed decision-
maker r considers two alternative solutions dra1t
rarrand d
ra2t
rarrfor
its partial decision-problem compared to the status quo drlowasttminus 1
rarr
With this in each of the search strategies modeled and inevery time step decision-maker r has three options to choosefrommdashincluding staying with the status quo
However the model captures thatmdashas a part of theboundary system in the MCSmdashsome boundaries related to
the distances of the two alternatives dra1t
rarrand d
ra2t
rarrcompared
to the status quo are set and enforced by the central unit(type 2 agent) In particular the boundary system enforcessearch strategies being of an exploitative explorative orambidextrous nature [20 58 81] and accordingly the modelcomprises the following three search strategies
(i) ldquoexploitation onlyrdquo both alternatives dra1t
rarrand d
ra2t
rarr
discovered by distributed decision-maker r differ from
the status quo drlowasttminus 1
rarrby one digit respectively Hence
the Hamming distance h(dra1
rarr) 1113936
Nr
i1|drlowasttminus 1
rarrminus d
ra1t
rarr|
of the first alternative to the status quo equals 1 as wellas is the case for the second alternative (ie
h(dra2
rarr) 1)
(ii) ldquoexploitation and explorationrdquo the local decision-makers are allowed to alternatively consider anoption with one bit flipped and another where two
1 2 3 4 5 6 1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8 9 10 11 121 X X X ndash ndash ndash 1 X X X ndash ndash ndash ndash ndash ndash 1 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash2 X X X ndash ndash ndash 2 X X X ndash ndash ndash ndash ndash ndash 2 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash3 X X X ndash ndash ndash 3 X X X ndash ndash ndash ndash ndash ndash 3 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash4 ndash ndash ndash X X X 4 ndash ndash ndash X X X ndash ndash ndash 4 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash5 ndash ndash ndash X X X 5 ndash ndash ndash X X X ndash ndash ndash 5 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash6 ndash ndash ndash X X X 6 ndash ndash ndash X X X ndash ndash ndash 6 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash
7 ndash ndash ndash ndash ndash ndash X X X 7 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash8 ndash ndash ndash ndash ndash ndash X X X 8 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash9 ndash ndash ndash ndash ndash ndash X X X 9 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash
10 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X11 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X12 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X
Choi
ce d
iD
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M D
Dec
M
Growth stage s = 1 (N1 = 6 K1 = 2 K1ex = 0)
Performance contribution Cj
Growth stage s = 2 (N2 = 9 K2 = 2 K2ex = 0)
Performance contribution Cj
Growth stage s = 3 (N3 = 12 K3 = 2 K3ex = 0)
Performance contribution Cj
Scope of primary control of distributed decision maker r (type 1 agent)X Choice i affects performance contribution jndash Choice i does not affect performance contribution j
Distributed decision maker (type 1 agent)DDecM
(a)
1 2 3 4 5 6 1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8 9 10 11 121 X X X ndash ndash X 1 X X X ndash ndash X X ndash ndash 1 X X X ndash ndash X X ndash ndash ndash ndash X2 X X X ndash X ndash 2 X X X ndash X ndash ndash X ndash 2 X X X ndash X ndash ndash X ndash ndash X ndash3 X X X X ndash ndash 3 X X X X ndash ndash ndash ndash ndash 3 X X X X ndash ndash ndash ndash ndash X ndash ndash4 X ndash ndash X X X 4 X ndash ndash X X X X ndash X 4 X ndash ndash X X X X ndash X ndash ndash X5 ndash X ndash X X X 5 ndash X ndash X X X ndash X ndash 5 ndash X ndash X X X ndash X ndash ndash X ndash6 ndash ndash X X X X 6 ndash ndash X X X X ndash ndash X 6 ndash ndash X X X X ndash ndash X X ndash ndash
7 ndash X ndash ndash ndash X X X X 7 ndash X ndash ndash ndash X X X X ndash ndash X8 ndash ndash X ndash X ndash X X X 8 ndash ndash X ndash X ndash X X X ndash X ndash9 X ndash ndash X ndash ndash X X X 9 X ndash ndash X ndash ndash X X X X ndash ndash
10 ndash X ndash X ndash ndash ndash X ndash X X X11 ndash ndash X ndash X ndash X ndash ndash X X X12 X ndash ndash ndash ndash X ndash ndash X X X X
Choi
ce d
iD
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M
Growth stage s = 1 (N1 = 6 K1 = 3 K1ex = 1)
Performance contribution Cj
Growth stage s = 2 (N2 = 9 K2 = 4 K2ex = 2)
Performance contribution Cj
Growth stage s = 3 (N3 = 12 K3 = 5 K3ex = 3)
Performance contribution Cj
Scope of primary control of distributed decision maker r (type 1 agent)X Choice i affects performance contribution jndash Choice i does not affect performance contribution j
Distributed decision maker (type 1 agent)DDecM
(b)
Figure 1 Interaction structures and growth stages in the simulation experiments (a) decomposable and (b) nondecomposable
6 Complexity
digits are altered ie the Hamming distances are
h(dra1
rarr) 1 and h(d
ra2rarr
) 2(iii) ldquoexploration onlyrdquo in each of both alternatives d
ra1t
rarr
and dra2t
rarr two bits are flipped compared to the status
quo drlowasttminus 1
rarr ie we have h(d
ra1rarr
) 2 and h(dra2
rarr) 2
333 Distributed Decision-Makersrsquo Objectives and Cost ofEffort Each local decision-maker r r 1 Ms pursuesits ldquoownrdquo objective (ie related to its respective sub-prob-lem) In particular each distributed decision-maker seeks to
identify that option drt
rarrout of d
rlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrwhich
promises the highest net performance Ar ie the highestdifference between partial performance Pr
tmdashresulting fromthe contributions Cit of those particular single choicesassigned to decision-maker rmdashand the related cost of efforts
for implementing drt
rarr
Art d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (5)
where the partial performance Prt (d
rt
rarr) of decision-maker rrsquos
contribution to overall performance Vt (see equation (4)) isgiven by
Prt d
rt
rarr1113874 1113875
1N
1113944
Nrs
i1+w
Cit (6)
with w 1113936rminus 1p1N
ps for rgt 1 and w 0 for r 1
In case of interactions across the sub-problems capturedby Kex
s gt 0 choices of decision-maker r might affect thecontribution of the other decision-makersrsquo qnep choices onqrsquos parochial performance and vice versa
In the model the number of single choices altered in
terms of the Hamming distance h(drlowasttminus 1
rarr d
rt
rarr) to the status quo
(ie the number of bits flipped) is regarded as the effort to betaken by decision-maker r in order to implement an optionWith this the possible range of effort is shaped by the searchstrategy as introduced in Section 332 the lower bound forthe effort in all three search strategies equals 0 for the case
that the status quo drlowasttminus 1
rarris chosen to be kept the upper bound
is 1 in the ldquoexploitation onlyrdquo and equals 2 in the ldquoexplo-ration onlyrdquo as well as in the ambidextrous strategy
For modeling the cost of effort as customary in eco-nomics (eg [82 83]) it is assumed that higher levels ofeffort are increasingly costly Hence for distributed de-cision-maker rrsquos cost of effort Zr we have Zr(h)prime gt 0 and
Zr(h)Prime gt 0 In particular the cost of effort Zr(drt
rarr) of de-
cision-maker r is modeled to be quadratically increasingwith the Hamming distance h to the status quo ie
Zrt d
rt
rarr1113874 1113875 z
rmiddot h d
rlowasttminus 1
rarr d
rt
rarr1113874 11138751113874 1113875
2 (7)
where zr is a cost coefficient For the sake of simplicity in thesimulation experiments the cost coefficient is the same for
every decision-makers r and does not change over time Forthis reason subsequently the index r indicating on a de-cision-maker r is skipped when addressing the cost co-efficient (considering decision-makers which areheterogeneous in respect to their cost functions (as it couldbe captured by different cost coefficients zr) would be anatural extension of the research effort presented here)
334 Evaluation of Options When evaluating their optionsthe decentralized decision-makers suffer from two types oflimited information First without eventual further com-munication prescribed by the coordination mechanism (seeSection 34) decision-maker r is not able to anticipate theother decision-makersrsquo qne r choices and thus assumes thatthey will stay with the status quo ie that they will opt for
dqlowasttminus 1
rarr(for this see also [84]) +is is particularly relevant in
case of inter-sub-problem interdependencies when otherlocal decision-makersrsquo actions may affect performance ofdecision-maker r
Second decentralized decision-makers are not able toperfectly ex-ante evaluate their newly discovered optionsrsquo
dra1t
rarrand d
ra2t
rarreffects on their partial performance Pr
t (drt
rarr)
(see equation (6)) Rather the ex-ante evaluation is afflictedwith some noise In particular for the sake of simplicity adecision-maker rrsquos perceived partial performance ( 1113957Pr) isdistorted by a relative error imputed to the true perfor-mance With this our local decision-makers search on noisypartial performance landscapes (for further types of errorssee [85]) +e error terms follow a Gaussian distributionN(0 σ) with expected value 0 and standard deviations σr forevery decision-maker r errors are assumed to be in-dependent from each other Hence the perceived perfor-mance 1113957Pr
t (dt
rarr) of distributed decision-maker r is given by
1113957Prt d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 + e
rd
rt
rarr1113874 1113875 (8)
and the objective function in equation (5) modifies to
1113958Art d
rt
rarr1113874 1113875 1113957Pr
t drt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (9)
With equation (8) each distributed decision-maker r has adistinct partial and distorted ldquoviewrdquo of the true fitnesslandscape each decision-maker r is exclusively in charge ofan ldquoownrdquo part of the entireN-dimensional decision-problemas it is shaped in the current growth stage and imperfectlyestimates the performance contributions of newly discov-ered options +us at a given growth stage the modelcaptures Ms + 1 heterogeneous (distorted) views of the truelandscape ie one view per local decision-makerr 1 Ms plus a headquartersrsquo perspective (for the lattersee Section 343)
However for the status quo option we assume that eachdecision-maker r remembers the performance obtainedfrom the last period and with this knows the actual per-formance Pr
tminus 1 of the status quo should it be implemented inperiod t again
Complexity 7
Based on the evaluation of options each decision-maker
r compiles a list Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 of preferences
where drp1t
rarrindicates the most preferred option out of
drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarr Correspondingly d
rp2t
rarrdenotes the
second-most and drp3t
rarrthe third-most preferred option
34CoordinationModes for SynthesizingPlans As a result ofthe search and (imperfect) evaluation of options so far eachdistributed decision-maker has an ordered list Lr
t of pref-erences which in terms of multiagent systems reflects theindividual [2] or local plan [69] +e next step within eachperiod t is to come to a decision on the organizationrsquos overallproblem dt
rarr ie to merge the decentralized decision-makersrsquo
preferences on drt
rarrcaptured in the Ms lists Lr
t into the overallconfiguration dt
rarr +is requires to employ a mode of co-
ordination for synthesizing the local plansmdashand the verycore of this paper is to study which mode emerges underwhich conditions of search strategy and cost of effort
As it was outlined in Section 2 a multitude of modes forsynthesizing local plans has been proposed in various do-mains Out of the numerous feasible mechanisms the modelcomprises three modes which could represent particularpronounced (for not to say ldquoextremerdquo) forms of co-ordination regarding
(i) (de-)centralization in terms of (locus of) authority(ii) direction of alignment ie lateral vs vertical(iii) parallelization vs sequencing of final decision re-
garding the local plans
In particular the three types of coordination captured inthe model (see Table 1) differ in the communicationchannels (the model assumes that communication in thecourse of coordination works perfectly for an investigationof the effects of unintended communications errors see[86]) the information employed in decision-making thelocus of final decision-making and in the end the tightnessof coordination provided (for an overview and furthermodes see eg [2 57 69 87 88])
341 Decentralized Mode +e highest level of autonomy isgranted to the Ms distributed decision-makers if each ofthem is allowed to choose its most preferred option +enthe overall organizational configuration dt
rarrresults from
dt
rarr d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr1113874 1113875 (10)
Hence for decision-maker rrsquos partial decision problemNr
s the option according to
drlowastt
rarr d
rp1t
rarrforallr isin 1 Ms1113864 1113865 (11)
is implemented Obviously this type of coordination doesnot require any form of communication between thedecentralized decision-makers or with the headquarter(central agent) +e headquarter does not intervene in de-cision-making directly and its role is limited to registering
the achieved performances Vt(dt
rarr) and Pr
t (drt
rarr) in the end of
each period t and eventually to reward the decentralizeddecision-makers accordingly
342 Sequential Mode +is mode captures the idea ofldquosequential planningrdquo +e distributed decision-makersmake their final choices sequentially with for the sake ofsimplicity the sequence being given by the index r of thedecision-makers In particular in time step t decision-makerr minus 1 informs decision-maker r with 1lt rleMs about thechoices made so far ie made by the ldquoprecedingrdquo decision-makers lt r Decision-maker rgt 1 re-evaluates its ldquoownrdquo
options drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrtaking these ldquopriorrdquo choices into
accountmdashpotentially resulting in an adjusted list of pref-
erences Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 and chooses d
rp1t
rarrwhich
here depends on drminus 1p1t
rarr ie is a function of the choices of
the preceding decision-makers Hence only decision-maker1 does not have to consider previous choices and the choiceof decision-maker r (1 Ms) is made according to
drlowastt
rarr
drp1t
rarr if r 1
drp1t
rarrd
rminus 1p1t
rarr1113874 1113875 if 1lt rleΜ
⎧⎪⎪⎨
⎪⎪⎩(12)
and with equation (12) the overall configuration is given by
dt
rarr d
Mlowastt
rarr+e headquarter (type 2 agent) does not intervene
in decision-making andmdashsimilar to the decentralizedmodemdashis confined to observing the performances achievedand eventually rewarding the decentralized decision-makers accordingly
343 Proposal Mode Each local decision-maker transfersits list Lr
t of preferences to the headquarter which compilesthe first preferences to a composite vector
dC
rarr (d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr) and then evaluates the
overall performance V(dC
rarr) (see equation (4)) that this
solution promisesHowever as with decentralized decision-makers in the
model it is assumed that the headquarter is not capable toperfectly ex-ante evaluate new options ie other solutionsthan the status quo (see Section 32) Rather similar to thelocal decision-makers the headquarter suffers from somerelative noise following a Gaussian distribution with ex-pected value 0 and standard deviations σcent resulting in a
perceived overall performance 1113957V(dC
rarr) +e headquarter
8 Complexity
decides in favor of the composite vector ie dt
rarr d
Crarr
if dC
rarr
promises the same or a higher performance as the status quodtminus 1rarr
ie if
1113957V dC
rarr1113888 1113889geV d
lowasttminus 1
rarr1113874 1113875 (13)
If the composite vector dC
rarrassembled from the local
decision-makersrsquo first preferences does not meet the con-dition in equation (13) the headquarter evaluates a vectorcomposed from the decentralized decision-makersrsquo secondpreferences according to equation (13) If this also does notat least promise the performance of the status quo then theorganization stays with the status quo ie then dt
rarr dtminus 1
rarr
35 Learning-Based Adaptation of Coordination +e verycore of this research endeavor is to study which modes ofcoordination emerge within growth processes of the artificialorganizations In order to capture some kind of self-adap-tation of coordination the model employs a simple mode ofreinforcement learning (for overviews see [89 90]) based onstatistical learning ie a generalized form of the BushndashMosteller model [91 92]
+is mode of learning is chosen for the following rea-sons In the vast multitude of forms of learning studied invarious domains (eg psychology economics and com-puter science) reinforcement learning is regarded to beamong the most basic forms of learning [92] It represents afundamental possible form of humansrsquo behavior but alsoprovides some basis for learning of artificial agents [90]mdashboth regarded as DDMS in this paper Moreover in thismodel as a form of experiential learning the mid-termedreinforcement learning on the coordination mode corre-sponds to the experiential type of short-termed adaptation[60] when the decision-making systems in every single time-step search for a superior solution compared to the statusquo However it would be a natural extension of the modelto let the DDMS employ other and in particular more
advanced forms of learning about which mode of co-ordination is appropriate within the stage of growth and forthe search strategy employed and the cost of effort
In the model reinforcement learning on coordination forsynthesizing local plans is represented in the following way Inthe end of each time step t the central agent (type 2 agent seeSection 32) receives information about the overall perfor-mance Vt according to equation (4) +is allows the centralagent in every TLth period to compute the performanceenhancements achieved within the last TL periods Moreoverin every TLth period the organizations can alter the type ofcoordination mode as introduced in Section 34 Hence ourDDMS face the mid-termed decision-problem which type ofcoordination mode ac(t) isin Ac (with |Ac| 3 see Section 34)to implement in the next TL periods Let p(ac t) denote theprobability of an alternative ac(t) to be chosen at time t (with0lep(ac t)le 1 and 1113936aacisinAc (p(ac t)) 1)
+e key idea of reinforcement learning is that theprobabilities of options are updated according to the positiveor negative stimuli resulting from these options In ourcontext whether the performance enhancement ΔVt ob-tained under the regime of a certain mode of coordinationac(t) in the previous TL periods is regarded positive ornegative depends on whether or not it at least equals anaspiration level v ΔVt of type ac(t) of coordination is de-fined as the relative performance enhancement achievedwithin the last TL periods of the adaptive walk ie
ΔVt Vt minus Vtminus TL
Vtminus TL
(14)
Hence the stimulus τ(t) is
τ(t) 1 if ΔVt ge v
minus 1 if ΔVt lt v1113896 (15)
+e probabilities of options ac isin Ac are updatedaccording to the following rule with λ (where 0le λle 1)giving the reinforcement strength [92]
Table 1 Overview of the modes of coordination in the model
Type of coordination modeDecentralized Sequential Proposal
Lateral communication No Yes NoVertical communication No No YesHeadquarter intervening No No YesRe-evaluation of local plans No Yes Yes
Information employed for finaldecisions
Expected parochialperformance
Expected parochial performancetaking predecessorrsquos choices into
account
Expected organization-wideaggregated performance
Locus of final decisions on localplans Decentralized Decentralized Centralized
Temporal order of final decisionson local plans In parallel Asynchronously (in sequence) Synchronously (ldquoat oncerdquo)
Final configurations for distributeddecision-makersrsquo sub-problems
First preferences
drp1t
rarrforallr isin 1 Ms1113864 1113865
First preferences subject topreceding decision-makersrsquo
choices ie drp1t
rarr(d
rminus 1p1t
rarr) for rgt 1
drp1t
rarrfor r 1
First (or second) preferences drp1t
rarr
[or drp2t
rarr] if 1113957V(d
Crarr
)geV(dtminus 1rarr
)
Complexity 9
p ac t + 1( 1113857 p a
c t( 1113857 + λ middot
1 minus p ac t( )( 1113857 if ac ac(t)and τ(t) 1
minus p ac t( ) if ac ac(t)and τ(t) minus 1
minus p ac t( ) if ac ne ac(t)and τ(t) 1
p ac t( ) middot p ac(t) t( )
1 minus p ac(t) t( ) if ac ne ac(t)and τ(t) minus 1
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(16)
After the probabilities are updated as given in equation(16) the ldquonextrdquo mode of coordination to be employed fromt + 1 to t + TL is determined at randommdashaccording to theupdated probabilities
4 Simulation Experiments ProcessualStructure Parameters and Analysis
+is section is intended to introduce the principle structureof the simulation experiments based on the theoreticalmodel as presented in the previous Section 3 For this firstSection 41 gives an overview of the principle processualstructure of the simulations before the parameters settingsare motivated (Section 42) and the metrics employed foranalysis of experiments are introduced (Section 43)
41 Process Overview of the Simulation Model Figure 2depicts the principle processual structure of the simula-tion model based on the theoretical model as introduced inthe previous Section 3 In particular the simulation in itscore is characterized by three loops capturing three temporalhorizons
In the short term in each time step t the artificial or-ganizations search for superior solutions of their Ns-di-mensional decision-problem where the overall problem issegmented into Ms sub-problems with each delegated to Ms
local decision-making agents accordingly (type 1 agents inSection 32) In the mid-term ie in each TLth time step thecentral unit (type 2 agent) evaluates the current mode ofcoordination learns from this evaluation via reinforcementand eventually chooses another mode of coordination forthe next TL periods In the long term in every TGth timestep the decision-problem grows by a fixed number Nr
s ofadditional single choices to be made and the number Ms ofdistributed decision-makers increases by 1 (for details seeSection 31)
42 Parameter Settings
421 Parameters Fixed for all Experiments In the simula-tion experimentsmdashparameter settings are listed inTable 2mdashorganizations are observed over T 750 periodswhere in every TL 10th period eventually the mode ofcoordination is switched (the observation period T and thelearning interval TL 10 were fixed based on pretests whichindicate that the results do not principally change when theorganizations are observed for a longer time the similar
holds for an extension of the learning interval (eg toTL 20) however shortening the learning period notablybelow 10 periods does not leave the different coordinationmodes ldquoenough timerdquo to unfold their particular potentialwith respect to the aspiration level)
In every TG 250th period the organizations undergo agrowth in problem space as well as in the number of dis-tributed decision-makers
(i) In their first growth stage the organizations face anNs1 6-dimensional overall decision-problemdecomposed into two sub-problems of equal size(ie Nr
s1 3forallr isin 1 2 ) assigned to two decision-makers (Ms1 2) accordingly
(ii) In the second growth stage (ie fromt 251 to 500) three additional binary choices areto be made by the organizations for which oneadditional local decision-maker is responsi-blemdashhence the organizations comprise 3 decen-tralized decision-makers ie Ms2 3
(iii) In the third stage the decision-problem grows bythree further binary choices and hence finally theorganizations deal with an Ns3 12-dimensionalproblem and a fourth decentralized decision-makercomes into play (Ms3 4)
+e simulations are run for a moderate level of noisecaptured by parameters σr and σcent relevant for the ex-anteevaluations of options by the local decision-makers and incase of the proposal mode the central agent respectively (seeSections 32 and 343) It is assumed that the information ofthe local decision-makersmdashonly related to their respectiveNr-dimensional sub-problemsmdashare more precise than theinformation of the central unit which is related to the entireNs-dimensional decision problem (ie σr lt σcent) +is isintended to capture differentiation and specialization [8 93]due to division of labor Some empirical evidence suggeststhat noise of about 10 of the true value in the domain ofmanagement control is at a reasonable range [94]
+e modes of coordination which the organizationschoose of are motivated and introduced in Section 34 +eorganizations employ the same initial mode of coordinationnamely the ldquodecentralizedrdquo mode +is ldquosetuprdquo procedure ischosen to make sure that the adaptive processes start from aldquodefinedrdquo initial configuration and without having thelearning processes overlaid by the strong performance en-hancements that are typically made in the very first periodsof the adaptive walks (notwithstanding further simulations
10 Complexity
have shown that the overlaying effects appear to be rathernegligible) However an intuitive ldquostoryrdquo behind this setupprocedure is that the organizations start in fact without any
particular mode of coordination ie the decentralizedmode(for example because they were newly founded) and keepthis until time t 10 in this period they ldquodiscoverrdquo the two
Yes
No
Yes No
Yes No
No
Yes
Decrease of propensities of current mode of coordination to be chosen for the next TL
periods (and increase of propensities of others)
Determination of mode of coordination implemented in the next TL periods according to updated propensities
Central agent evaluates performance enhancement achievedwith the current mode of coordination in the last TL periods
Time step t = 0 growth stage s = 1number of distributed decision-making agents MS=1 = 2
Generation of a performance landscape according to the interaction structureat the first growth stage
Random-driven determination of the initial configuration dt=0 of the overalldecision-problem
Extension of performance landscape according to the interaction structure at the ldquonewrdquo growth stage s increase of number of distributed decision-making
agents by 1 ie MS = MS + 1
t = t + 1
Growth stage s = s + 1
Each distributed decision-maker r discovers alternatives a1 and a2 to the statusquo of the partial problem which is delegated to this decision-maker r
and forms its preferences (local plans)
Overall configuration dt is determined from the local plans according to the current mode of coordination
Central agent determines performance Vt obtained with configuration dt
Increase of propensities of current mode ofcoordination to be chosen for the next TL periods
(and decrease of propensities of others)
t mod TL = 0
t mod TG = 0
Positive feedback
t gt T Stop
Start
Figure 2 Principle processual structure of the simulation model
Complexity 11
alternative modes and choose randomly one option ac isin Ac
out of the three options (ie |Ac| 3) where each mode hasthe same initial probability 1|Ac| +en in every TL 10thperiod probabilities are adjusted according to the perfor-mance enhancements +e parameters for learning corre-spond to a moderate strength of learning [95] On basis ofthe updated probabilities eventually a new coordinationmode is established
422 Contingency Factors Parameters Subject to Variationacross Experiments As argued in the Introduction thisresearch effort takes a contingency perspective and inparticular intends to study the interacting effects of (1)complexity of decision-problem (2) search strategy and (3)cost of effort Accordingly these three contingent factors aresubject to variation across simulation experiments (see alsothe lower part in Table 2)
(1) Complexity of Decision-Problem In line with the idea offactorial design of simulation experiments [96] the exper-iments distinguish between two different levels of
complexity of the decision problem to be solved by theorganizations which capture two rather pronounced cases
Based on the seminal work of Simon [16] on the ar-chitecture of complexity (near) decomposability as com-pared to nondecomposability is the key aspect in theunderstanding of complexity (see also Introduction)Against this background the simulations are run for agrowing decomposable and a growing nondecomposableinteraction structure where the principle ldquotyperdquo of com-plexity is kept over the growth stages Hence the growthprocesses simulated may capture some kind of organicgrowth [97ndash99] Figure 1 provides a graphical representationof interaction matrices of the growing decision-problemswhich could capture the following situations (in the sim-ulation experiments the number of decision-makers mirrorsthe growth of the decision-problem for avoiding interferencewith effects of varying size of decision-makersrsquo scope ofcompetency (for further references see [55 100 101]))
(i) ldquodecomposablerdquo (Figure 1(a)) +is type of organi-zation and growth relates to the idea of an organi-zation consisting of self-contained ldquosub-problemsrdquo
Table 2 Parameter settings
Parameter ValuestypesParameters fixed for all experiments (see Section 421)Observation period T 750Interval of learning TL 10Interval of growth stages TG 250Growth stages s 1 2 3
Number of choicesIn growth stage s 1 Ns1 6In growth stage s 2 Ns2 9In growth stage s 3 Ns3 12
Number Ms of distributed decision-makers
In growth stage s 1 M1 2 distributed
decision-makers with sub-problems d1
rarr (d1 d2 d3)
and d2
rarr (d4 d5 d6)
In growth stage s 2 M2 3 ie one additional
distributed decision-maker 3 with sub-problem d3
rarr
(d7 d8 d9)
In growth stage s 3 M3 4 ie one furtheradditional decision-maker 4 with sub-problem
d4
rarr (d10 d11 d12)
Precision of ex-ante evaluation Distributed decision-makers σr 005forallrCentral agent (headquarter) σcent 01
Modes of coordination ac isin Ac ldquodecentralized rdquo ldquosequential rdquo ldquoproposalrdquo1113864 1113865
Aspiration level v 0Learning strength λ 05Parameters subject to variation across experiments (see Section 422)
Complexity of decision problem ldquoDecomposablerdquo ldquonondecomposablerdquofor details of interaction structures see Figure 1
Search strategy
ldquoExploitation onlyrdquo h(dra1
rarr) 1 and h(d
ra2rarr
) 1
ldquoExploitation and explorationrdquo h(dra1
rarr) 1 and
h(dra2
rarr) 2
ldquoExploration onlyrdquo h(dra1
rarr) 2 and h(d
ra2rarr
) 2
Cost of effort (cost coefficient) Baseline scenarios z 0001Sensitivity analysis z isin 0 0003 0005 001 002
12 Complexity
or ldquounitsrdquo [7 8] which have intense intra-unit in-teractions but no cross-unit interactions In the be-ginning the organizationrsquos overall decision-problemis decomposable into 2 distinct sub-problems [17]which for example might be related to differentproducts without any interrelations between themFor the 2 products 2 business units are responsible Inthe course of the growth stages the organizationldquoaddsrdquo further products and business units corre-spondingly without interrelations among the ldquooldrdquoand ldquonewrdquo products and accordingly the units
(ii) ldquonondecomposablerdquo (example given in Figure 1(b))+is case of interactionsmay capture whatmdashaccordingto the prominent classification of +ompson [7]mdashiscalled reciprocal interdependencies In particular thisstructure could represent an organization with func-tional specialization showing the typical high level ofinterrelations between sub-problemsmdashand de-partments accordingly In the course of growth it maybe that the vertical integration is increased (egestablishing an inhouse production of certain in-termediate products or sales logistics)
(2) Search Strategy As described in Section 332 thedecentralized decision-makers employ one of three funda-mental search strategies which are intended to capture ex-ploitation exploration and an ambidextrous strategy [20] asenforced by the boundary systemmdasheach characterized by thenumber of options and the Hamming distances allowed Forexample if an exploration strategy is pursued with M3 4local decision-makers and N3 12 in the final growth stageat maximum 8 digits of the overall decision-problem couldbe flipped ie two-thirds of the configuration dt
rarrcould be
altered in one time step
(3) Cost of Effort While the search strategy shapes themaximum of binary choices that could be flipped the actualalterations are affected by the local decision-makersrsquo pref-erences together with the coordination mode employedAccording to equations (7) and (9) in Section 3 the dis-tributed decision-makersrsquo preferences are affected by thecost of effort and in particular by cost coefficient z
However in order to be clear and concise the simulationexperiments are conducted in two steps First to gain a basicunderstanding of the emergence of coordination in thebaseline scenarios the cost of effort is at a moderate levelz 0001 for all local decision-makers Second a sensitivityanalysis is conducted in whose course the cost of effort isvaried from costless effort (ie z 0) to higher levels of costof effort (ie zgt 0001) in order to analyze the effects of costof effort on the emergence of coordination
43 Metrics Employed for Analysis of Simulations In thebaseline scenarios with 2 interaction structures and 3 searchstrategies under investigation at a given level of cost of effort6 different scenarios of parameters are simulated For thesensitivity analysis 5 additional levels of cost of effort are
simulated which results in 30 further scenarios For each ofin sum the 36 scenarios 2500 simulations are run with 10runs on 250 performance landscapes
+e research question of this paper boils down to thequestion which coordination modes emerge predominantlyfor which contingencies in terms of complexity searchstrategy and cost of effort Hence for answering this questionthe key metric is the relative frequencies of the coordinationmodes in the end of the observation period t 750
Moreover the relative frequencies of coordinationmodes over observation time are depicted +is allows togain an understanding of how their relative shares evolve inthe course of growth and learning
As described in Section 35 the propensities to opt for theone or the other mode of coordination is shaped by theperformance gains achieved under the current mode in thelast TL periods Hence the level of performance according toequations (2) and (4) respectively in Section 31 ie the finalperformance achieved at the end of the observation period forthe different coordination modes is of interest For this the2500 simulations for each scenario were grouped accordingto that mode of coordination which was ldquoactiverdquo (ie hasemerged) in the last period t 750 of the observation time
+ese subgroups were analyzed individually and inparticular the mean of the final performance Vt750 achievedfor each coordination mode selected at t 750 is computed aswell as the respective confidence interval at a 999 level ofconfidence
Moreover another metric informing about the effec-tiveness of the search processes is the relative frequency of theglobal maximum found in t 750 of the respective per-formance landscape which is computed for each subgroup(based on the coordination mode in t 750) separately
In order to gain some deeper understanding of the searchprocesses conducted by the DDMS two further metrics wereobserved and analyzed for each subgroup the ratio of periods inwhich the status quo is altered and the ratio of periods with false-positive alterations ie alterations in favor of a false-positiveoption (ie reducing Vt) to the T 750 periods of observation+ese metrics put some focus on the efficiency of search
5 Results and Discussion
+e results are presented in two steps First for gaining a basicunderstanding of the effects of intraorganizational complexityand search strategy on the emergence of coordination thebaseline scenarios are presented and analyzed (Section 51)While in the baseline scenarios the distributed decision-makers operate at a rather moderate though nonzero level ofcost of effort the sensitivity analysis (Section 52) illustrates theeffect of cost of effort at the local decision-makersrsquo side on thecoordination mode emerging at the systemrsquos level
51 Complexity and Search Strategy Baseline Scenarios
511 Overview For the baseline scenarios Table 3 displayscondensed results obtained from the simulation experimentsaccording to the metrics introduced in Section 43 In ad-dition Table 4 reports on the significances of mean
Complexity 13
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
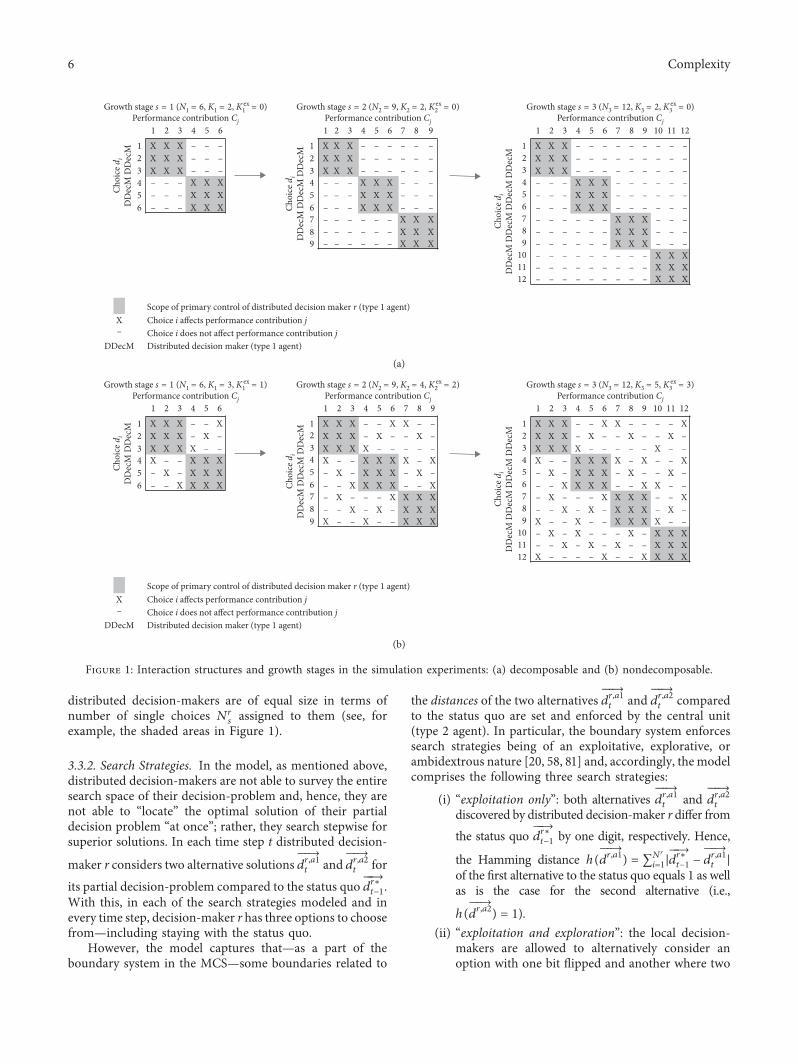
distributed decision-makers are of equal size in terms ofnumber of single choices Nr
s assigned to them (see forexample the shaded areas in Figure 1)
332 Search Strategies In the model as mentioned abovedistributed decision-makers are not able to survey the entiresearch space of their decision-problem and hence they arenot able to ldquolocaterdquo the optimal solution of their partialdecision problem ldquoat oncerdquo rather they search stepwise forsuperior solutions In each time step t distributed decision-
maker r considers two alternative solutions dra1t
rarrand d
ra2t
rarrfor
its partial decision-problem compared to the status quo drlowasttminus 1
rarr
With this in each of the search strategies modeled and inevery time step decision-maker r has three options to choosefrommdashincluding staying with the status quo
However the model captures thatmdashas a part of theboundary system in the MCSmdashsome boundaries related to
the distances of the two alternatives dra1t
rarrand d
ra2t
rarrcompared
to the status quo are set and enforced by the central unit(type 2 agent) In particular the boundary system enforcessearch strategies being of an exploitative explorative orambidextrous nature [20 58 81] and accordingly the modelcomprises the following three search strategies
(i) ldquoexploitation onlyrdquo both alternatives dra1t
rarrand d
ra2t
rarr
discovered by distributed decision-maker r differ from
the status quo drlowasttminus 1
rarrby one digit respectively Hence
the Hamming distance h(dra1
rarr) 1113936
Nr
i1|drlowasttminus 1
rarrminus d
ra1t
rarr|
of the first alternative to the status quo equals 1 as wellas is the case for the second alternative (ie
h(dra2
rarr) 1)
(ii) ldquoexploitation and explorationrdquo the local decision-makers are allowed to alternatively consider anoption with one bit flipped and another where two
1 2 3 4 5 6 1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8 9 10 11 121 X X X ndash ndash ndash 1 X X X ndash ndash ndash ndash ndash ndash 1 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash2 X X X ndash ndash ndash 2 X X X ndash ndash ndash ndash ndash ndash 2 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash3 X X X ndash ndash ndash 3 X X X ndash ndash ndash ndash ndash ndash 3 X X X ndash ndash ndash ndash ndash ndash ndash ndash ndash4 ndash ndash ndash X X X 4 ndash ndash ndash X X X ndash ndash ndash 4 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash5 ndash ndash ndash X X X 5 ndash ndash ndash X X X ndash ndash ndash 5 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash6 ndash ndash ndash X X X 6 ndash ndash ndash X X X ndash ndash ndash 6 ndash ndash ndash X X X ndash ndash ndash ndash ndash ndash
7 ndash ndash ndash ndash ndash ndash X X X 7 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash8 ndash ndash ndash ndash ndash ndash X X X 8 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash9 ndash ndash ndash ndash ndash ndash X X X 9 ndash ndash ndash ndash ndash ndash X X X ndash ndash ndash
10 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X11 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X12 ndash ndash ndash ndash ndash ndash ndash ndash ndash X X X
Choi
ce d
iD
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M D
Dec
M
Growth stage s = 1 (N1 = 6 K1 = 2 K1ex = 0)
Performance contribution Cj
Growth stage s = 2 (N2 = 9 K2 = 2 K2ex = 0)
Performance contribution Cj
Growth stage s = 3 (N3 = 12 K3 = 2 K3ex = 0)
Performance contribution Cj
Scope of primary control of distributed decision maker r (type 1 agent)X Choice i affects performance contribution jndash Choice i does not affect performance contribution j
Distributed decision maker (type 1 agent)DDecM
(a)
1 2 3 4 5 6 1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8 9 10 11 121 X X X ndash ndash X 1 X X X ndash ndash X X ndash ndash 1 X X X ndash ndash X X ndash ndash ndash ndash X2 X X X ndash X ndash 2 X X X ndash X ndash ndash X ndash 2 X X X ndash X ndash ndash X ndash ndash X ndash3 X X X X ndash ndash 3 X X X X ndash ndash ndash ndash ndash 3 X X X X ndash ndash ndash ndash ndash X ndash ndash4 X ndash ndash X X X 4 X ndash ndash X X X X ndash X 4 X ndash ndash X X X X ndash X ndash ndash X5 ndash X ndash X X X 5 ndash X ndash X X X ndash X ndash 5 ndash X ndash X X X ndash X ndash ndash X ndash6 ndash ndash X X X X 6 ndash ndash X X X X ndash ndash X 6 ndash ndash X X X X ndash ndash X X ndash ndash
7 ndash X ndash ndash ndash X X X X 7 ndash X ndash ndash ndash X X X X ndash ndash X8 ndash ndash X ndash X ndash X X X 8 ndash ndash X ndash X ndash X X X ndash X ndash9 X ndash ndash X ndash ndash X X X 9 X ndash ndash X ndash ndash X X X X ndash ndash
10 ndash X ndash X ndash ndash ndash X ndash X X X11 ndash ndash X ndash X ndash X ndash ndash X X X12 X ndash ndash ndash ndash X ndash ndash X X X X
Choi
ce d
iD
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M D
Dec
M
Choi
ce d
iD
Dec
M D
Dec
M D
Dec
M
Growth stage s = 1 (N1 = 6 K1 = 3 K1ex = 1)
Performance contribution Cj
Growth stage s = 2 (N2 = 9 K2 = 4 K2ex = 2)
Performance contribution Cj
Growth stage s = 3 (N3 = 12 K3 = 5 K3ex = 3)
Performance contribution Cj
Scope of primary control of distributed decision maker r (type 1 agent)X Choice i affects performance contribution jndash Choice i does not affect performance contribution j
Distributed decision maker (type 1 agent)DDecM
(b)
Figure 1 Interaction structures and growth stages in the simulation experiments (a) decomposable and (b) nondecomposable
6 Complexity
digits are altered ie the Hamming distances are
h(dra1
rarr) 1 and h(d
ra2rarr
) 2(iii) ldquoexploration onlyrdquo in each of both alternatives d
ra1t
rarr
and dra2t
rarr two bits are flipped compared to the status
quo drlowasttminus 1
rarr ie we have h(d
ra1rarr
) 2 and h(dra2
rarr) 2
333 Distributed Decision-Makersrsquo Objectives and Cost ofEffort Each local decision-maker r r 1 Ms pursuesits ldquoownrdquo objective (ie related to its respective sub-prob-lem) In particular each distributed decision-maker seeks to
identify that option drt
rarrout of d
rlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrwhich
promises the highest net performance Ar ie the highestdifference between partial performance Pr
tmdashresulting fromthe contributions Cit of those particular single choicesassigned to decision-maker rmdashand the related cost of efforts
for implementing drt
rarr
Art d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (5)
where the partial performance Prt (d
rt
rarr) of decision-maker rrsquos
contribution to overall performance Vt (see equation (4)) isgiven by
Prt d
rt
rarr1113874 1113875
1N
1113944
Nrs
i1+w
Cit (6)
with w 1113936rminus 1p1N
ps for rgt 1 and w 0 for r 1
In case of interactions across the sub-problems capturedby Kex
s gt 0 choices of decision-maker r might affect thecontribution of the other decision-makersrsquo qnep choices onqrsquos parochial performance and vice versa
In the model the number of single choices altered in
terms of the Hamming distance h(drlowasttminus 1
rarr d
rt
rarr) to the status quo
(ie the number of bits flipped) is regarded as the effort to betaken by decision-maker r in order to implement an optionWith this the possible range of effort is shaped by the searchstrategy as introduced in Section 332 the lower bound forthe effort in all three search strategies equals 0 for the case
that the status quo drlowasttminus 1
rarris chosen to be kept the upper bound
is 1 in the ldquoexploitation onlyrdquo and equals 2 in the ldquoexplo-ration onlyrdquo as well as in the ambidextrous strategy
For modeling the cost of effort as customary in eco-nomics (eg [82 83]) it is assumed that higher levels ofeffort are increasingly costly Hence for distributed de-cision-maker rrsquos cost of effort Zr we have Zr(h)prime gt 0 and
Zr(h)Prime gt 0 In particular the cost of effort Zr(drt
rarr) of de-
cision-maker r is modeled to be quadratically increasingwith the Hamming distance h to the status quo ie
Zrt d
rt
rarr1113874 1113875 z
rmiddot h d
rlowasttminus 1
rarr d
rt
rarr1113874 11138751113874 1113875
2 (7)
where zr is a cost coefficient For the sake of simplicity in thesimulation experiments the cost coefficient is the same for
every decision-makers r and does not change over time Forthis reason subsequently the index r indicating on a de-cision-maker r is skipped when addressing the cost co-efficient (considering decision-makers which areheterogeneous in respect to their cost functions (as it couldbe captured by different cost coefficients zr) would be anatural extension of the research effort presented here)
334 Evaluation of Options When evaluating their optionsthe decentralized decision-makers suffer from two types oflimited information First without eventual further com-munication prescribed by the coordination mechanism (seeSection 34) decision-maker r is not able to anticipate theother decision-makersrsquo qne r choices and thus assumes thatthey will stay with the status quo ie that they will opt for
dqlowasttminus 1
rarr(for this see also [84]) +is is particularly relevant in
case of inter-sub-problem interdependencies when otherlocal decision-makersrsquo actions may affect performance ofdecision-maker r
Second decentralized decision-makers are not able toperfectly ex-ante evaluate their newly discovered optionsrsquo
dra1t
rarrand d
ra2t
rarreffects on their partial performance Pr
t (drt
rarr)
(see equation (6)) Rather the ex-ante evaluation is afflictedwith some noise In particular for the sake of simplicity adecision-maker rrsquos perceived partial performance ( 1113957Pr) isdistorted by a relative error imputed to the true perfor-mance With this our local decision-makers search on noisypartial performance landscapes (for further types of errorssee [85]) +e error terms follow a Gaussian distributionN(0 σ) with expected value 0 and standard deviations σr forevery decision-maker r errors are assumed to be in-dependent from each other Hence the perceived perfor-mance 1113957Pr
t (dt
rarr) of distributed decision-maker r is given by
1113957Prt d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 + e
rd
rt
rarr1113874 1113875 (8)
and the objective function in equation (5) modifies to
1113958Art d
rt
rarr1113874 1113875 1113957Pr
t drt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (9)
With equation (8) each distributed decision-maker r has adistinct partial and distorted ldquoviewrdquo of the true fitnesslandscape each decision-maker r is exclusively in charge ofan ldquoownrdquo part of the entireN-dimensional decision-problemas it is shaped in the current growth stage and imperfectlyestimates the performance contributions of newly discov-ered options +us at a given growth stage the modelcaptures Ms + 1 heterogeneous (distorted) views of the truelandscape ie one view per local decision-makerr 1 Ms plus a headquartersrsquo perspective (for the lattersee Section 343)
However for the status quo option we assume that eachdecision-maker r remembers the performance obtainedfrom the last period and with this knows the actual per-formance Pr
tminus 1 of the status quo should it be implemented inperiod t again
Complexity 7
Based on the evaluation of options each decision-maker
r compiles a list Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 of preferences
where drp1t
rarrindicates the most preferred option out of
drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarr Correspondingly d
rp2t
rarrdenotes the
second-most and drp3t
rarrthe third-most preferred option
34CoordinationModes for SynthesizingPlans As a result ofthe search and (imperfect) evaluation of options so far eachdistributed decision-maker has an ordered list Lr
t of pref-erences which in terms of multiagent systems reflects theindividual [2] or local plan [69] +e next step within eachperiod t is to come to a decision on the organizationrsquos overallproblem dt
rarr ie to merge the decentralized decision-makersrsquo
preferences on drt
rarrcaptured in the Ms lists Lr
t into the overallconfiguration dt
rarr +is requires to employ a mode of co-
ordination for synthesizing the local plansmdashand the verycore of this paper is to study which mode emerges underwhich conditions of search strategy and cost of effort
As it was outlined in Section 2 a multitude of modes forsynthesizing local plans has been proposed in various do-mains Out of the numerous feasible mechanisms the modelcomprises three modes which could represent particularpronounced (for not to say ldquoextremerdquo) forms of co-ordination regarding
(i) (de-)centralization in terms of (locus of) authority(ii) direction of alignment ie lateral vs vertical(iii) parallelization vs sequencing of final decision re-
garding the local plans
In particular the three types of coordination captured inthe model (see Table 1) differ in the communicationchannels (the model assumes that communication in thecourse of coordination works perfectly for an investigationof the effects of unintended communications errors see[86]) the information employed in decision-making thelocus of final decision-making and in the end the tightnessof coordination provided (for an overview and furthermodes see eg [2 57 69 87 88])
341 Decentralized Mode +e highest level of autonomy isgranted to the Ms distributed decision-makers if each ofthem is allowed to choose its most preferred option +enthe overall organizational configuration dt
rarrresults from
dt
rarr d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr1113874 1113875 (10)
Hence for decision-maker rrsquos partial decision problemNr
s the option according to
drlowastt
rarr d
rp1t
rarrforallr isin 1 Ms1113864 1113865 (11)
is implemented Obviously this type of coordination doesnot require any form of communication between thedecentralized decision-makers or with the headquarter(central agent) +e headquarter does not intervene in de-cision-making directly and its role is limited to registering
the achieved performances Vt(dt
rarr) and Pr
t (drt
rarr) in the end of
each period t and eventually to reward the decentralizeddecision-makers accordingly
342 Sequential Mode +is mode captures the idea ofldquosequential planningrdquo +e distributed decision-makersmake their final choices sequentially with for the sake ofsimplicity the sequence being given by the index r of thedecision-makers In particular in time step t decision-makerr minus 1 informs decision-maker r with 1lt rleMs about thechoices made so far ie made by the ldquoprecedingrdquo decision-makers lt r Decision-maker rgt 1 re-evaluates its ldquoownrdquo
options drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrtaking these ldquopriorrdquo choices into
accountmdashpotentially resulting in an adjusted list of pref-
erences Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 and chooses d
rp1t
rarrwhich
here depends on drminus 1p1t
rarr ie is a function of the choices of
the preceding decision-makers Hence only decision-maker1 does not have to consider previous choices and the choiceof decision-maker r (1 Ms) is made according to
drlowastt
rarr
drp1t
rarr if r 1
drp1t
rarrd
rminus 1p1t
rarr1113874 1113875 if 1lt rleΜ
⎧⎪⎪⎨
⎪⎪⎩(12)
and with equation (12) the overall configuration is given by
dt
rarr d
Mlowastt
rarr+e headquarter (type 2 agent) does not intervene
in decision-making andmdashsimilar to the decentralizedmodemdashis confined to observing the performances achievedand eventually rewarding the decentralized decision-makers accordingly
343 Proposal Mode Each local decision-maker transfersits list Lr
t of preferences to the headquarter which compilesthe first preferences to a composite vector
dC
rarr (d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr) and then evaluates the
overall performance V(dC
rarr) (see equation (4)) that this
solution promisesHowever as with decentralized decision-makers in the
model it is assumed that the headquarter is not capable toperfectly ex-ante evaluate new options ie other solutionsthan the status quo (see Section 32) Rather similar to thelocal decision-makers the headquarter suffers from somerelative noise following a Gaussian distribution with ex-pected value 0 and standard deviations σcent resulting in a
perceived overall performance 1113957V(dC
rarr) +e headquarter
8 Complexity
decides in favor of the composite vector ie dt
rarr d
Crarr
if dC
rarr
promises the same or a higher performance as the status quodtminus 1rarr
ie if
1113957V dC
rarr1113888 1113889geV d
lowasttminus 1
rarr1113874 1113875 (13)
If the composite vector dC
rarrassembled from the local
decision-makersrsquo first preferences does not meet the con-dition in equation (13) the headquarter evaluates a vectorcomposed from the decentralized decision-makersrsquo secondpreferences according to equation (13) If this also does notat least promise the performance of the status quo then theorganization stays with the status quo ie then dt
rarr dtminus 1
rarr
35 Learning-Based Adaptation of Coordination +e verycore of this research endeavor is to study which modes ofcoordination emerge within growth processes of the artificialorganizations In order to capture some kind of self-adap-tation of coordination the model employs a simple mode ofreinforcement learning (for overviews see [89 90]) based onstatistical learning ie a generalized form of the BushndashMosteller model [91 92]
+is mode of learning is chosen for the following rea-sons In the vast multitude of forms of learning studied invarious domains (eg psychology economics and com-puter science) reinforcement learning is regarded to beamong the most basic forms of learning [92] It represents afundamental possible form of humansrsquo behavior but alsoprovides some basis for learning of artificial agents [90]mdashboth regarded as DDMS in this paper Moreover in thismodel as a form of experiential learning the mid-termedreinforcement learning on the coordination mode corre-sponds to the experiential type of short-termed adaptation[60] when the decision-making systems in every single time-step search for a superior solution compared to the statusquo However it would be a natural extension of the modelto let the DDMS employ other and in particular more
advanced forms of learning about which mode of co-ordination is appropriate within the stage of growth and forthe search strategy employed and the cost of effort
In the model reinforcement learning on coordination forsynthesizing local plans is represented in the following way Inthe end of each time step t the central agent (type 2 agent seeSection 32) receives information about the overall perfor-mance Vt according to equation (4) +is allows the centralagent in every TLth period to compute the performanceenhancements achieved within the last TL periods Moreoverin every TLth period the organizations can alter the type ofcoordination mode as introduced in Section 34 Hence ourDDMS face the mid-termed decision-problem which type ofcoordination mode ac(t) isin Ac (with |Ac| 3 see Section 34)to implement in the next TL periods Let p(ac t) denote theprobability of an alternative ac(t) to be chosen at time t (with0lep(ac t)le 1 and 1113936aacisinAc (p(ac t)) 1)
+e key idea of reinforcement learning is that theprobabilities of options are updated according to the positiveor negative stimuli resulting from these options In ourcontext whether the performance enhancement ΔVt ob-tained under the regime of a certain mode of coordinationac(t) in the previous TL periods is regarded positive ornegative depends on whether or not it at least equals anaspiration level v ΔVt of type ac(t) of coordination is de-fined as the relative performance enhancement achievedwithin the last TL periods of the adaptive walk ie
ΔVt Vt minus Vtminus TL
Vtminus TL
(14)
Hence the stimulus τ(t) is
τ(t) 1 if ΔVt ge v
minus 1 if ΔVt lt v1113896 (15)
+e probabilities of options ac isin Ac are updatedaccording to the following rule with λ (where 0le λle 1)giving the reinforcement strength [92]
Table 1 Overview of the modes of coordination in the model
Type of coordination modeDecentralized Sequential Proposal
Lateral communication No Yes NoVertical communication No No YesHeadquarter intervening No No YesRe-evaluation of local plans No Yes Yes
Information employed for finaldecisions
Expected parochialperformance
Expected parochial performancetaking predecessorrsquos choices into
account
Expected organization-wideaggregated performance
Locus of final decisions on localplans Decentralized Decentralized Centralized
Temporal order of final decisionson local plans In parallel Asynchronously (in sequence) Synchronously (ldquoat oncerdquo)
Final configurations for distributeddecision-makersrsquo sub-problems
First preferences
drp1t
rarrforallr isin 1 Ms1113864 1113865
First preferences subject topreceding decision-makersrsquo
choices ie drp1t
rarr(d
rminus 1p1t
rarr) for rgt 1
drp1t
rarrfor r 1
First (or second) preferences drp1t
rarr
[or drp2t
rarr] if 1113957V(d
Crarr
)geV(dtminus 1rarr
)
Complexity 9
p ac t + 1( 1113857 p a
c t( 1113857 + λ middot
1 minus p ac t( )( 1113857 if ac ac(t)and τ(t) 1
minus p ac t( ) if ac ac(t)and τ(t) minus 1
minus p ac t( ) if ac ne ac(t)and τ(t) 1
p ac t( ) middot p ac(t) t( )
1 minus p ac(t) t( ) if ac ne ac(t)and τ(t) minus 1
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(16)
After the probabilities are updated as given in equation(16) the ldquonextrdquo mode of coordination to be employed fromt + 1 to t + TL is determined at randommdashaccording to theupdated probabilities
4 Simulation Experiments ProcessualStructure Parameters and Analysis
+is section is intended to introduce the principle structureof the simulation experiments based on the theoreticalmodel as presented in the previous Section 3 For this firstSection 41 gives an overview of the principle processualstructure of the simulations before the parameters settingsare motivated (Section 42) and the metrics employed foranalysis of experiments are introduced (Section 43)
41 Process Overview of the Simulation Model Figure 2depicts the principle processual structure of the simula-tion model based on the theoretical model as introduced inthe previous Section 3 In particular the simulation in itscore is characterized by three loops capturing three temporalhorizons
In the short term in each time step t the artificial or-ganizations search for superior solutions of their Ns-di-mensional decision-problem where the overall problem issegmented into Ms sub-problems with each delegated to Ms
local decision-making agents accordingly (type 1 agents inSection 32) In the mid-term ie in each TLth time step thecentral unit (type 2 agent) evaluates the current mode ofcoordination learns from this evaluation via reinforcementand eventually chooses another mode of coordination forthe next TL periods In the long term in every TGth timestep the decision-problem grows by a fixed number Nr
s ofadditional single choices to be made and the number Ms ofdistributed decision-makers increases by 1 (for details seeSection 31)
42 Parameter Settings
421 Parameters Fixed for all Experiments In the simula-tion experimentsmdashparameter settings are listed inTable 2mdashorganizations are observed over T 750 periodswhere in every TL 10th period eventually the mode ofcoordination is switched (the observation period T and thelearning interval TL 10 were fixed based on pretests whichindicate that the results do not principally change when theorganizations are observed for a longer time the similar
holds for an extension of the learning interval (eg toTL 20) however shortening the learning period notablybelow 10 periods does not leave the different coordinationmodes ldquoenough timerdquo to unfold their particular potentialwith respect to the aspiration level)
In every TG 250th period the organizations undergo agrowth in problem space as well as in the number of dis-tributed decision-makers
(i) In their first growth stage the organizations face anNs1 6-dimensional overall decision-problemdecomposed into two sub-problems of equal size(ie Nr
s1 3forallr isin 1 2 ) assigned to two decision-makers (Ms1 2) accordingly
(ii) In the second growth stage (ie fromt 251 to 500) three additional binary choices areto be made by the organizations for which oneadditional local decision-maker is responsi-blemdashhence the organizations comprise 3 decen-tralized decision-makers ie Ms2 3
(iii) In the third stage the decision-problem grows bythree further binary choices and hence finally theorganizations deal with an Ns3 12-dimensionalproblem and a fourth decentralized decision-makercomes into play (Ms3 4)
+e simulations are run for a moderate level of noisecaptured by parameters σr and σcent relevant for the ex-anteevaluations of options by the local decision-makers and incase of the proposal mode the central agent respectively (seeSections 32 and 343) It is assumed that the information ofthe local decision-makersmdashonly related to their respectiveNr-dimensional sub-problemsmdashare more precise than theinformation of the central unit which is related to the entireNs-dimensional decision problem (ie σr lt σcent) +is isintended to capture differentiation and specialization [8 93]due to division of labor Some empirical evidence suggeststhat noise of about 10 of the true value in the domain ofmanagement control is at a reasonable range [94]
+e modes of coordination which the organizationschoose of are motivated and introduced in Section 34 +eorganizations employ the same initial mode of coordinationnamely the ldquodecentralizedrdquo mode +is ldquosetuprdquo procedure ischosen to make sure that the adaptive processes start from aldquodefinedrdquo initial configuration and without having thelearning processes overlaid by the strong performance en-hancements that are typically made in the very first periodsof the adaptive walks (notwithstanding further simulations
10 Complexity
have shown that the overlaying effects appear to be rathernegligible) However an intuitive ldquostoryrdquo behind this setupprocedure is that the organizations start in fact without any
particular mode of coordination ie the decentralizedmode(for example because they were newly founded) and keepthis until time t 10 in this period they ldquodiscoverrdquo the two
Yes
No
Yes No
Yes No
No
Yes
Decrease of propensities of current mode of coordination to be chosen for the next TL
periods (and increase of propensities of others)
Determination of mode of coordination implemented in the next TL periods according to updated propensities
Central agent evaluates performance enhancement achievedwith the current mode of coordination in the last TL periods
Time step t = 0 growth stage s = 1number of distributed decision-making agents MS=1 = 2
Generation of a performance landscape according to the interaction structureat the first growth stage
Random-driven determination of the initial configuration dt=0 of the overalldecision-problem
Extension of performance landscape according to the interaction structure at the ldquonewrdquo growth stage s increase of number of distributed decision-making
agents by 1 ie MS = MS + 1
t = t + 1
Growth stage s = s + 1
Each distributed decision-maker r discovers alternatives a1 and a2 to the statusquo of the partial problem which is delegated to this decision-maker r
and forms its preferences (local plans)
Overall configuration dt is determined from the local plans according to the current mode of coordination
Central agent determines performance Vt obtained with configuration dt
Increase of propensities of current mode ofcoordination to be chosen for the next TL periods
(and decrease of propensities of others)
t mod TL = 0
t mod TG = 0
Positive feedback
t gt T Stop
Start
Figure 2 Principle processual structure of the simulation model
Complexity 11
alternative modes and choose randomly one option ac isin Ac
out of the three options (ie |Ac| 3) where each mode hasthe same initial probability 1|Ac| +en in every TL 10thperiod probabilities are adjusted according to the perfor-mance enhancements +e parameters for learning corre-spond to a moderate strength of learning [95] On basis ofthe updated probabilities eventually a new coordinationmode is established
422 Contingency Factors Parameters Subject to Variationacross Experiments As argued in the Introduction thisresearch effort takes a contingency perspective and inparticular intends to study the interacting effects of (1)complexity of decision-problem (2) search strategy and (3)cost of effort Accordingly these three contingent factors aresubject to variation across simulation experiments (see alsothe lower part in Table 2)
(1) Complexity of Decision-Problem In line with the idea offactorial design of simulation experiments [96] the exper-iments distinguish between two different levels of
complexity of the decision problem to be solved by theorganizations which capture two rather pronounced cases
Based on the seminal work of Simon [16] on the ar-chitecture of complexity (near) decomposability as com-pared to nondecomposability is the key aspect in theunderstanding of complexity (see also Introduction)Against this background the simulations are run for agrowing decomposable and a growing nondecomposableinteraction structure where the principle ldquotyperdquo of com-plexity is kept over the growth stages Hence the growthprocesses simulated may capture some kind of organicgrowth [97ndash99] Figure 1 provides a graphical representationof interaction matrices of the growing decision-problemswhich could capture the following situations (in the sim-ulation experiments the number of decision-makers mirrorsthe growth of the decision-problem for avoiding interferencewith effects of varying size of decision-makersrsquo scope ofcompetency (for further references see [55 100 101]))
(i) ldquodecomposablerdquo (Figure 1(a)) +is type of organi-zation and growth relates to the idea of an organi-zation consisting of self-contained ldquosub-problemsrdquo
Table 2 Parameter settings
Parameter ValuestypesParameters fixed for all experiments (see Section 421)Observation period T 750Interval of learning TL 10Interval of growth stages TG 250Growth stages s 1 2 3
Number of choicesIn growth stage s 1 Ns1 6In growth stage s 2 Ns2 9In growth stage s 3 Ns3 12
Number Ms of distributed decision-makers
In growth stage s 1 M1 2 distributed
decision-makers with sub-problems d1
rarr (d1 d2 d3)
and d2
rarr (d4 d5 d6)
In growth stage s 2 M2 3 ie one additional
distributed decision-maker 3 with sub-problem d3
rarr
(d7 d8 d9)
In growth stage s 3 M3 4 ie one furtheradditional decision-maker 4 with sub-problem
d4
rarr (d10 d11 d12)
Precision of ex-ante evaluation Distributed decision-makers σr 005forallrCentral agent (headquarter) σcent 01
Modes of coordination ac isin Ac ldquodecentralized rdquo ldquosequential rdquo ldquoproposalrdquo1113864 1113865
Aspiration level v 0Learning strength λ 05Parameters subject to variation across experiments (see Section 422)
Complexity of decision problem ldquoDecomposablerdquo ldquonondecomposablerdquofor details of interaction structures see Figure 1
Search strategy
ldquoExploitation onlyrdquo h(dra1
rarr) 1 and h(d
ra2rarr
) 1
ldquoExploitation and explorationrdquo h(dra1
rarr) 1 and
h(dra2
rarr) 2
ldquoExploration onlyrdquo h(dra1
rarr) 2 and h(d
ra2rarr
) 2
Cost of effort (cost coefficient) Baseline scenarios z 0001Sensitivity analysis z isin 0 0003 0005 001 002
12 Complexity
or ldquounitsrdquo [7 8] which have intense intra-unit in-teractions but no cross-unit interactions In the be-ginning the organizationrsquos overall decision-problemis decomposable into 2 distinct sub-problems [17]which for example might be related to differentproducts without any interrelations between themFor the 2 products 2 business units are responsible Inthe course of the growth stages the organizationldquoaddsrdquo further products and business units corre-spondingly without interrelations among the ldquooldrdquoand ldquonewrdquo products and accordingly the units
(ii) ldquonondecomposablerdquo (example given in Figure 1(b))+is case of interactionsmay capture whatmdashaccordingto the prominent classification of +ompson [7]mdashiscalled reciprocal interdependencies In particular thisstructure could represent an organization with func-tional specialization showing the typical high level ofinterrelations between sub-problemsmdashand de-partments accordingly In the course of growth it maybe that the vertical integration is increased (egestablishing an inhouse production of certain in-termediate products or sales logistics)
(2) Search Strategy As described in Section 332 thedecentralized decision-makers employ one of three funda-mental search strategies which are intended to capture ex-ploitation exploration and an ambidextrous strategy [20] asenforced by the boundary systemmdasheach characterized by thenumber of options and the Hamming distances allowed Forexample if an exploration strategy is pursued with M3 4local decision-makers and N3 12 in the final growth stageat maximum 8 digits of the overall decision-problem couldbe flipped ie two-thirds of the configuration dt
rarrcould be
altered in one time step
(3) Cost of Effort While the search strategy shapes themaximum of binary choices that could be flipped the actualalterations are affected by the local decision-makersrsquo pref-erences together with the coordination mode employedAccording to equations (7) and (9) in Section 3 the dis-tributed decision-makersrsquo preferences are affected by thecost of effort and in particular by cost coefficient z
However in order to be clear and concise the simulationexperiments are conducted in two steps First to gain a basicunderstanding of the emergence of coordination in thebaseline scenarios the cost of effort is at a moderate levelz 0001 for all local decision-makers Second a sensitivityanalysis is conducted in whose course the cost of effort isvaried from costless effort (ie z 0) to higher levels of costof effort (ie zgt 0001) in order to analyze the effects of costof effort on the emergence of coordination
43 Metrics Employed for Analysis of Simulations In thebaseline scenarios with 2 interaction structures and 3 searchstrategies under investigation at a given level of cost of effort6 different scenarios of parameters are simulated For thesensitivity analysis 5 additional levels of cost of effort are
simulated which results in 30 further scenarios For each ofin sum the 36 scenarios 2500 simulations are run with 10runs on 250 performance landscapes
+e research question of this paper boils down to thequestion which coordination modes emerge predominantlyfor which contingencies in terms of complexity searchstrategy and cost of effort Hence for answering this questionthe key metric is the relative frequencies of the coordinationmodes in the end of the observation period t 750
Moreover the relative frequencies of coordinationmodes over observation time are depicted +is allows togain an understanding of how their relative shares evolve inthe course of growth and learning
As described in Section 35 the propensities to opt for theone or the other mode of coordination is shaped by theperformance gains achieved under the current mode in thelast TL periods Hence the level of performance according toequations (2) and (4) respectively in Section 31 ie the finalperformance achieved at the end of the observation period forthe different coordination modes is of interest For this the2500 simulations for each scenario were grouped accordingto that mode of coordination which was ldquoactiverdquo (ie hasemerged) in the last period t 750 of the observation time
+ese subgroups were analyzed individually and inparticular the mean of the final performance Vt750 achievedfor each coordination mode selected at t 750 is computed aswell as the respective confidence interval at a 999 level ofconfidence
Moreover another metric informing about the effec-tiveness of the search processes is the relative frequency of theglobal maximum found in t 750 of the respective per-formance landscape which is computed for each subgroup(based on the coordination mode in t 750) separately
In order to gain some deeper understanding of the searchprocesses conducted by the DDMS two further metrics wereobserved and analyzed for each subgroup the ratio of periods inwhich the status quo is altered and the ratio of periods with false-positive alterations ie alterations in favor of a false-positiveoption (ie reducing Vt) to the T 750 periods of observation+ese metrics put some focus on the efficiency of search
5 Results and Discussion
+e results are presented in two steps First for gaining a basicunderstanding of the effects of intraorganizational complexityand search strategy on the emergence of coordination thebaseline scenarios are presented and analyzed (Section 51)While in the baseline scenarios the distributed decision-makers operate at a rather moderate though nonzero level ofcost of effort the sensitivity analysis (Section 52) illustrates theeffect of cost of effort at the local decision-makersrsquo side on thecoordination mode emerging at the systemrsquos level
51 Complexity and Search Strategy Baseline Scenarios
511 Overview For the baseline scenarios Table 3 displayscondensed results obtained from the simulation experimentsaccording to the metrics introduced in Section 43 In ad-dition Table 4 reports on the significances of mean
Complexity 13
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

digits are altered ie the Hamming distances are
h(dra1
rarr) 1 and h(d
ra2rarr
) 2(iii) ldquoexploration onlyrdquo in each of both alternatives d
ra1t
rarr
and dra2t
rarr two bits are flipped compared to the status
quo drlowasttminus 1
rarr ie we have h(d
ra1rarr
) 2 and h(dra2
rarr) 2
333 Distributed Decision-Makersrsquo Objectives and Cost ofEffort Each local decision-maker r r 1 Ms pursuesits ldquoownrdquo objective (ie related to its respective sub-prob-lem) In particular each distributed decision-maker seeks to
identify that option drt
rarrout of d
rlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrwhich
promises the highest net performance Ar ie the highestdifference between partial performance Pr
tmdashresulting fromthe contributions Cit of those particular single choicesassigned to decision-maker rmdashand the related cost of efforts
for implementing drt
rarr
Art d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (5)
where the partial performance Prt (d
rt
rarr) of decision-maker rrsquos
contribution to overall performance Vt (see equation (4)) isgiven by
Prt d
rt
rarr1113874 1113875
1N
1113944
Nrs
i1+w
Cit (6)
with w 1113936rminus 1p1N
ps for rgt 1 and w 0 for r 1
In case of interactions across the sub-problems capturedby Kex
s gt 0 choices of decision-maker r might affect thecontribution of the other decision-makersrsquo qnep choices onqrsquos parochial performance and vice versa
In the model the number of single choices altered in
terms of the Hamming distance h(drlowasttminus 1
rarr d
rt
rarr) to the status quo
(ie the number of bits flipped) is regarded as the effort to betaken by decision-maker r in order to implement an optionWith this the possible range of effort is shaped by the searchstrategy as introduced in Section 332 the lower bound forthe effort in all three search strategies equals 0 for the case
that the status quo drlowasttminus 1
rarris chosen to be kept the upper bound
is 1 in the ldquoexploitation onlyrdquo and equals 2 in the ldquoexplo-ration onlyrdquo as well as in the ambidextrous strategy
For modeling the cost of effort as customary in eco-nomics (eg [82 83]) it is assumed that higher levels ofeffort are increasingly costly Hence for distributed de-cision-maker rrsquos cost of effort Zr we have Zr(h)prime gt 0 and
Zr(h)Prime gt 0 In particular the cost of effort Zr(drt
rarr) of de-
cision-maker r is modeled to be quadratically increasingwith the Hamming distance h to the status quo ie
Zrt d
rt
rarr1113874 1113875 z
rmiddot h d
rlowasttminus 1
rarr d
rt
rarr1113874 11138751113874 1113875
2 (7)
where zr is a cost coefficient For the sake of simplicity in thesimulation experiments the cost coefficient is the same for
every decision-makers r and does not change over time Forthis reason subsequently the index r indicating on a de-cision-maker r is skipped when addressing the cost co-efficient (considering decision-makers which areheterogeneous in respect to their cost functions (as it couldbe captured by different cost coefficients zr) would be anatural extension of the research effort presented here)
334 Evaluation of Options When evaluating their optionsthe decentralized decision-makers suffer from two types oflimited information First without eventual further com-munication prescribed by the coordination mechanism (seeSection 34) decision-maker r is not able to anticipate theother decision-makersrsquo qne r choices and thus assumes thatthey will stay with the status quo ie that they will opt for
dqlowasttminus 1
rarr(for this see also [84]) +is is particularly relevant in
case of inter-sub-problem interdependencies when otherlocal decision-makersrsquo actions may affect performance ofdecision-maker r
Second decentralized decision-makers are not able toperfectly ex-ante evaluate their newly discovered optionsrsquo
dra1t
rarrand d
ra2t
rarreffects on their partial performance Pr
t (drt
rarr)
(see equation (6)) Rather the ex-ante evaluation is afflictedwith some noise In particular for the sake of simplicity adecision-maker rrsquos perceived partial performance ( 1113957Pr) isdistorted by a relative error imputed to the true perfor-mance With this our local decision-makers search on noisypartial performance landscapes (for further types of errorssee [85]) +e error terms follow a Gaussian distributionN(0 σ) with expected value 0 and standard deviations σr forevery decision-maker r errors are assumed to be in-dependent from each other Hence the perceived perfor-mance 1113957Pr
t (dt
rarr) of distributed decision-maker r is given by
1113957Prt d
rt
rarr1113874 1113875 P
rt d
rt
rarr1113874 1113875 + e
rd
rt
rarr1113874 1113875 (8)
and the objective function in equation (5) modifies to
1113958Art d
rt
rarr1113874 1113875 1113957Pr
t drt
rarr1113874 1113875 minus Z
rt d
rt
rarr1113874 1113875 (9)
With equation (8) each distributed decision-maker r has adistinct partial and distorted ldquoviewrdquo of the true fitnesslandscape each decision-maker r is exclusively in charge ofan ldquoownrdquo part of the entireN-dimensional decision-problemas it is shaped in the current growth stage and imperfectlyestimates the performance contributions of newly discov-ered options +us at a given growth stage the modelcaptures Ms + 1 heterogeneous (distorted) views of the truelandscape ie one view per local decision-makerr 1 Ms plus a headquartersrsquo perspective (for the lattersee Section 343)
However for the status quo option we assume that eachdecision-maker r remembers the performance obtainedfrom the last period and with this knows the actual per-formance Pr
tminus 1 of the status quo should it be implemented inperiod t again
Complexity 7
Based on the evaluation of options each decision-maker
r compiles a list Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 of preferences
where drp1t
rarrindicates the most preferred option out of
drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarr Correspondingly d
rp2t
rarrdenotes the
second-most and drp3t
rarrthe third-most preferred option
34CoordinationModes for SynthesizingPlans As a result ofthe search and (imperfect) evaluation of options so far eachdistributed decision-maker has an ordered list Lr
t of pref-erences which in terms of multiagent systems reflects theindividual [2] or local plan [69] +e next step within eachperiod t is to come to a decision on the organizationrsquos overallproblem dt
rarr ie to merge the decentralized decision-makersrsquo
preferences on drt
rarrcaptured in the Ms lists Lr
t into the overallconfiguration dt
rarr +is requires to employ a mode of co-
ordination for synthesizing the local plansmdashand the verycore of this paper is to study which mode emerges underwhich conditions of search strategy and cost of effort
As it was outlined in Section 2 a multitude of modes forsynthesizing local plans has been proposed in various do-mains Out of the numerous feasible mechanisms the modelcomprises three modes which could represent particularpronounced (for not to say ldquoextremerdquo) forms of co-ordination regarding
(i) (de-)centralization in terms of (locus of) authority(ii) direction of alignment ie lateral vs vertical(iii) parallelization vs sequencing of final decision re-
garding the local plans
In particular the three types of coordination captured inthe model (see Table 1) differ in the communicationchannels (the model assumes that communication in thecourse of coordination works perfectly for an investigationof the effects of unintended communications errors see[86]) the information employed in decision-making thelocus of final decision-making and in the end the tightnessof coordination provided (for an overview and furthermodes see eg [2 57 69 87 88])
341 Decentralized Mode +e highest level of autonomy isgranted to the Ms distributed decision-makers if each ofthem is allowed to choose its most preferred option +enthe overall organizational configuration dt
rarrresults from
dt
rarr d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr1113874 1113875 (10)
Hence for decision-maker rrsquos partial decision problemNr
s the option according to
drlowastt
rarr d
rp1t
rarrforallr isin 1 Ms1113864 1113865 (11)
is implemented Obviously this type of coordination doesnot require any form of communication between thedecentralized decision-makers or with the headquarter(central agent) +e headquarter does not intervene in de-cision-making directly and its role is limited to registering
the achieved performances Vt(dt
rarr) and Pr
t (drt
rarr) in the end of
each period t and eventually to reward the decentralizeddecision-makers accordingly
342 Sequential Mode +is mode captures the idea ofldquosequential planningrdquo +e distributed decision-makersmake their final choices sequentially with for the sake ofsimplicity the sequence being given by the index r of thedecision-makers In particular in time step t decision-makerr minus 1 informs decision-maker r with 1lt rleMs about thechoices made so far ie made by the ldquoprecedingrdquo decision-makers lt r Decision-maker rgt 1 re-evaluates its ldquoownrdquo
options drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrtaking these ldquopriorrdquo choices into
accountmdashpotentially resulting in an adjusted list of pref-
erences Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 and chooses d
rp1t
rarrwhich
here depends on drminus 1p1t
rarr ie is a function of the choices of
the preceding decision-makers Hence only decision-maker1 does not have to consider previous choices and the choiceof decision-maker r (1 Ms) is made according to
drlowastt
rarr
drp1t
rarr if r 1
drp1t
rarrd
rminus 1p1t
rarr1113874 1113875 if 1lt rleΜ
⎧⎪⎪⎨
⎪⎪⎩(12)
and with equation (12) the overall configuration is given by
dt
rarr d
Mlowastt
rarr+e headquarter (type 2 agent) does not intervene
in decision-making andmdashsimilar to the decentralizedmodemdashis confined to observing the performances achievedand eventually rewarding the decentralized decision-makers accordingly
343 Proposal Mode Each local decision-maker transfersits list Lr
t of preferences to the headquarter which compilesthe first preferences to a composite vector
dC
rarr (d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr) and then evaluates the
overall performance V(dC
rarr) (see equation (4)) that this
solution promisesHowever as with decentralized decision-makers in the
model it is assumed that the headquarter is not capable toperfectly ex-ante evaluate new options ie other solutionsthan the status quo (see Section 32) Rather similar to thelocal decision-makers the headquarter suffers from somerelative noise following a Gaussian distribution with ex-pected value 0 and standard deviations σcent resulting in a
perceived overall performance 1113957V(dC
rarr) +e headquarter
8 Complexity
decides in favor of the composite vector ie dt
rarr d
Crarr
if dC
rarr
promises the same or a higher performance as the status quodtminus 1rarr
ie if
1113957V dC
rarr1113888 1113889geV d
lowasttminus 1
rarr1113874 1113875 (13)
If the composite vector dC
rarrassembled from the local
decision-makersrsquo first preferences does not meet the con-dition in equation (13) the headquarter evaluates a vectorcomposed from the decentralized decision-makersrsquo secondpreferences according to equation (13) If this also does notat least promise the performance of the status quo then theorganization stays with the status quo ie then dt
rarr dtminus 1
rarr
35 Learning-Based Adaptation of Coordination +e verycore of this research endeavor is to study which modes ofcoordination emerge within growth processes of the artificialorganizations In order to capture some kind of self-adap-tation of coordination the model employs a simple mode ofreinforcement learning (for overviews see [89 90]) based onstatistical learning ie a generalized form of the BushndashMosteller model [91 92]
+is mode of learning is chosen for the following rea-sons In the vast multitude of forms of learning studied invarious domains (eg psychology economics and com-puter science) reinforcement learning is regarded to beamong the most basic forms of learning [92] It represents afundamental possible form of humansrsquo behavior but alsoprovides some basis for learning of artificial agents [90]mdashboth regarded as DDMS in this paper Moreover in thismodel as a form of experiential learning the mid-termedreinforcement learning on the coordination mode corre-sponds to the experiential type of short-termed adaptation[60] when the decision-making systems in every single time-step search for a superior solution compared to the statusquo However it would be a natural extension of the modelto let the DDMS employ other and in particular more
advanced forms of learning about which mode of co-ordination is appropriate within the stage of growth and forthe search strategy employed and the cost of effort
In the model reinforcement learning on coordination forsynthesizing local plans is represented in the following way Inthe end of each time step t the central agent (type 2 agent seeSection 32) receives information about the overall perfor-mance Vt according to equation (4) +is allows the centralagent in every TLth period to compute the performanceenhancements achieved within the last TL periods Moreoverin every TLth period the organizations can alter the type ofcoordination mode as introduced in Section 34 Hence ourDDMS face the mid-termed decision-problem which type ofcoordination mode ac(t) isin Ac (with |Ac| 3 see Section 34)to implement in the next TL periods Let p(ac t) denote theprobability of an alternative ac(t) to be chosen at time t (with0lep(ac t)le 1 and 1113936aacisinAc (p(ac t)) 1)
+e key idea of reinforcement learning is that theprobabilities of options are updated according to the positiveor negative stimuli resulting from these options In ourcontext whether the performance enhancement ΔVt ob-tained under the regime of a certain mode of coordinationac(t) in the previous TL periods is regarded positive ornegative depends on whether or not it at least equals anaspiration level v ΔVt of type ac(t) of coordination is de-fined as the relative performance enhancement achievedwithin the last TL periods of the adaptive walk ie
ΔVt Vt minus Vtminus TL
Vtminus TL
(14)
Hence the stimulus τ(t) is
τ(t) 1 if ΔVt ge v
minus 1 if ΔVt lt v1113896 (15)
+e probabilities of options ac isin Ac are updatedaccording to the following rule with λ (where 0le λle 1)giving the reinforcement strength [92]
Table 1 Overview of the modes of coordination in the model
Type of coordination modeDecentralized Sequential Proposal
Lateral communication No Yes NoVertical communication No No YesHeadquarter intervening No No YesRe-evaluation of local plans No Yes Yes
Information employed for finaldecisions
Expected parochialperformance
Expected parochial performancetaking predecessorrsquos choices into
account
Expected organization-wideaggregated performance
Locus of final decisions on localplans Decentralized Decentralized Centralized
Temporal order of final decisionson local plans In parallel Asynchronously (in sequence) Synchronously (ldquoat oncerdquo)
Final configurations for distributeddecision-makersrsquo sub-problems
First preferences
drp1t
rarrforallr isin 1 Ms1113864 1113865
First preferences subject topreceding decision-makersrsquo
choices ie drp1t
rarr(d
rminus 1p1t
rarr) for rgt 1
drp1t
rarrfor r 1
First (or second) preferences drp1t
rarr
[or drp2t
rarr] if 1113957V(d
Crarr
)geV(dtminus 1rarr
)
Complexity 9
p ac t + 1( 1113857 p a
c t( 1113857 + λ middot
1 minus p ac t( )( 1113857 if ac ac(t)and τ(t) 1
minus p ac t( ) if ac ac(t)and τ(t) minus 1
minus p ac t( ) if ac ne ac(t)and τ(t) 1
p ac t( ) middot p ac(t) t( )
1 minus p ac(t) t( ) if ac ne ac(t)and τ(t) minus 1
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(16)
After the probabilities are updated as given in equation(16) the ldquonextrdquo mode of coordination to be employed fromt + 1 to t + TL is determined at randommdashaccording to theupdated probabilities
4 Simulation Experiments ProcessualStructure Parameters and Analysis
+is section is intended to introduce the principle structureof the simulation experiments based on the theoreticalmodel as presented in the previous Section 3 For this firstSection 41 gives an overview of the principle processualstructure of the simulations before the parameters settingsare motivated (Section 42) and the metrics employed foranalysis of experiments are introduced (Section 43)
41 Process Overview of the Simulation Model Figure 2depicts the principle processual structure of the simula-tion model based on the theoretical model as introduced inthe previous Section 3 In particular the simulation in itscore is characterized by three loops capturing three temporalhorizons
In the short term in each time step t the artificial or-ganizations search for superior solutions of their Ns-di-mensional decision-problem where the overall problem issegmented into Ms sub-problems with each delegated to Ms
local decision-making agents accordingly (type 1 agents inSection 32) In the mid-term ie in each TLth time step thecentral unit (type 2 agent) evaluates the current mode ofcoordination learns from this evaluation via reinforcementand eventually chooses another mode of coordination forthe next TL periods In the long term in every TGth timestep the decision-problem grows by a fixed number Nr
s ofadditional single choices to be made and the number Ms ofdistributed decision-makers increases by 1 (for details seeSection 31)
42 Parameter Settings
421 Parameters Fixed for all Experiments In the simula-tion experimentsmdashparameter settings are listed inTable 2mdashorganizations are observed over T 750 periodswhere in every TL 10th period eventually the mode ofcoordination is switched (the observation period T and thelearning interval TL 10 were fixed based on pretests whichindicate that the results do not principally change when theorganizations are observed for a longer time the similar
holds for an extension of the learning interval (eg toTL 20) however shortening the learning period notablybelow 10 periods does not leave the different coordinationmodes ldquoenough timerdquo to unfold their particular potentialwith respect to the aspiration level)
In every TG 250th period the organizations undergo agrowth in problem space as well as in the number of dis-tributed decision-makers
(i) In their first growth stage the organizations face anNs1 6-dimensional overall decision-problemdecomposed into two sub-problems of equal size(ie Nr
s1 3forallr isin 1 2 ) assigned to two decision-makers (Ms1 2) accordingly
(ii) In the second growth stage (ie fromt 251 to 500) three additional binary choices areto be made by the organizations for which oneadditional local decision-maker is responsi-blemdashhence the organizations comprise 3 decen-tralized decision-makers ie Ms2 3
(iii) In the third stage the decision-problem grows bythree further binary choices and hence finally theorganizations deal with an Ns3 12-dimensionalproblem and a fourth decentralized decision-makercomes into play (Ms3 4)
+e simulations are run for a moderate level of noisecaptured by parameters σr and σcent relevant for the ex-anteevaluations of options by the local decision-makers and incase of the proposal mode the central agent respectively (seeSections 32 and 343) It is assumed that the information ofthe local decision-makersmdashonly related to their respectiveNr-dimensional sub-problemsmdashare more precise than theinformation of the central unit which is related to the entireNs-dimensional decision problem (ie σr lt σcent) +is isintended to capture differentiation and specialization [8 93]due to division of labor Some empirical evidence suggeststhat noise of about 10 of the true value in the domain ofmanagement control is at a reasonable range [94]
+e modes of coordination which the organizationschoose of are motivated and introduced in Section 34 +eorganizations employ the same initial mode of coordinationnamely the ldquodecentralizedrdquo mode +is ldquosetuprdquo procedure ischosen to make sure that the adaptive processes start from aldquodefinedrdquo initial configuration and without having thelearning processes overlaid by the strong performance en-hancements that are typically made in the very first periodsof the adaptive walks (notwithstanding further simulations
10 Complexity
have shown that the overlaying effects appear to be rathernegligible) However an intuitive ldquostoryrdquo behind this setupprocedure is that the organizations start in fact without any
particular mode of coordination ie the decentralizedmode(for example because they were newly founded) and keepthis until time t 10 in this period they ldquodiscoverrdquo the two
Yes
No
Yes No
Yes No
No
Yes
Decrease of propensities of current mode of coordination to be chosen for the next TL
periods (and increase of propensities of others)
Determination of mode of coordination implemented in the next TL periods according to updated propensities
Central agent evaluates performance enhancement achievedwith the current mode of coordination in the last TL periods
Time step t = 0 growth stage s = 1number of distributed decision-making agents MS=1 = 2
Generation of a performance landscape according to the interaction structureat the first growth stage
Random-driven determination of the initial configuration dt=0 of the overalldecision-problem
Extension of performance landscape according to the interaction structure at the ldquonewrdquo growth stage s increase of number of distributed decision-making
agents by 1 ie MS = MS + 1
t = t + 1
Growth stage s = s + 1
Each distributed decision-maker r discovers alternatives a1 and a2 to the statusquo of the partial problem which is delegated to this decision-maker r
and forms its preferences (local plans)
Overall configuration dt is determined from the local plans according to the current mode of coordination
Central agent determines performance Vt obtained with configuration dt
Increase of propensities of current mode ofcoordination to be chosen for the next TL periods
(and decrease of propensities of others)
t mod TL = 0
t mod TG = 0
Positive feedback
t gt T Stop
Start
Figure 2 Principle processual structure of the simulation model
Complexity 11
alternative modes and choose randomly one option ac isin Ac
out of the three options (ie |Ac| 3) where each mode hasthe same initial probability 1|Ac| +en in every TL 10thperiod probabilities are adjusted according to the perfor-mance enhancements +e parameters for learning corre-spond to a moderate strength of learning [95] On basis ofthe updated probabilities eventually a new coordinationmode is established
422 Contingency Factors Parameters Subject to Variationacross Experiments As argued in the Introduction thisresearch effort takes a contingency perspective and inparticular intends to study the interacting effects of (1)complexity of decision-problem (2) search strategy and (3)cost of effort Accordingly these three contingent factors aresubject to variation across simulation experiments (see alsothe lower part in Table 2)
(1) Complexity of Decision-Problem In line with the idea offactorial design of simulation experiments [96] the exper-iments distinguish between two different levels of
complexity of the decision problem to be solved by theorganizations which capture two rather pronounced cases
Based on the seminal work of Simon [16] on the ar-chitecture of complexity (near) decomposability as com-pared to nondecomposability is the key aspect in theunderstanding of complexity (see also Introduction)Against this background the simulations are run for agrowing decomposable and a growing nondecomposableinteraction structure where the principle ldquotyperdquo of com-plexity is kept over the growth stages Hence the growthprocesses simulated may capture some kind of organicgrowth [97ndash99] Figure 1 provides a graphical representationof interaction matrices of the growing decision-problemswhich could capture the following situations (in the sim-ulation experiments the number of decision-makers mirrorsthe growth of the decision-problem for avoiding interferencewith effects of varying size of decision-makersrsquo scope ofcompetency (for further references see [55 100 101]))
(i) ldquodecomposablerdquo (Figure 1(a)) +is type of organi-zation and growth relates to the idea of an organi-zation consisting of self-contained ldquosub-problemsrdquo
Table 2 Parameter settings
Parameter ValuestypesParameters fixed for all experiments (see Section 421)Observation period T 750Interval of learning TL 10Interval of growth stages TG 250Growth stages s 1 2 3
Number of choicesIn growth stage s 1 Ns1 6In growth stage s 2 Ns2 9In growth stage s 3 Ns3 12
Number Ms of distributed decision-makers
In growth stage s 1 M1 2 distributed
decision-makers with sub-problems d1
rarr (d1 d2 d3)
and d2
rarr (d4 d5 d6)
In growth stage s 2 M2 3 ie one additional
distributed decision-maker 3 with sub-problem d3
rarr
(d7 d8 d9)
In growth stage s 3 M3 4 ie one furtheradditional decision-maker 4 with sub-problem
d4
rarr (d10 d11 d12)
Precision of ex-ante evaluation Distributed decision-makers σr 005forallrCentral agent (headquarter) σcent 01
Modes of coordination ac isin Ac ldquodecentralized rdquo ldquosequential rdquo ldquoproposalrdquo1113864 1113865
Aspiration level v 0Learning strength λ 05Parameters subject to variation across experiments (see Section 422)
Complexity of decision problem ldquoDecomposablerdquo ldquonondecomposablerdquofor details of interaction structures see Figure 1
Search strategy
ldquoExploitation onlyrdquo h(dra1
rarr) 1 and h(d
ra2rarr
) 1
ldquoExploitation and explorationrdquo h(dra1
rarr) 1 and
h(dra2
rarr) 2
ldquoExploration onlyrdquo h(dra1
rarr) 2 and h(d
ra2rarr
) 2
Cost of effort (cost coefficient) Baseline scenarios z 0001Sensitivity analysis z isin 0 0003 0005 001 002
12 Complexity
or ldquounitsrdquo [7 8] which have intense intra-unit in-teractions but no cross-unit interactions In the be-ginning the organizationrsquos overall decision-problemis decomposable into 2 distinct sub-problems [17]which for example might be related to differentproducts without any interrelations between themFor the 2 products 2 business units are responsible Inthe course of the growth stages the organizationldquoaddsrdquo further products and business units corre-spondingly without interrelations among the ldquooldrdquoand ldquonewrdquo products and accordingly the units
(ii) ldquonondecomposablerdquo (example given in Figure 1(b))+is case of interactionsmay capture whatmdashaccordingto the prominent classification of +ompson [7]mdashiscalled reciprocal interdependencies In particular thisstructure could represent an organization with func-tional specialization showing the typical high level ofinterrelations between sub-problemsmdashand de-partments accordingly In the course of growth it maybe that the vertical integration is increased (egestablishing an inhouse production of certain in-termediate products or sales logistics)
(2) Search Strategy As described in Section 332 thedecentralized decision-makers employ one of three funda-mental search strategies which are intended to capture ex-ploitation exploration and an ambidextrous strategy [20] asenforced by the boundary systemmdasheach characterized by thenumber of options and the Hamming distances allowed Forexample if an exploration strategy is pursued with M3 4local decision-makers and N3 12 in the final growth stageat maximum 8 digits of the overall decision-problem couldbe flipped ie two-thirds of the configuration dt
rarrcould be
altered in one time step
(3) Cost of Effort While the search strategy shapes themaximum of binary choices that could be flipped the actualalterations are affected by the local decision-makersrsquo pref-erences together with the coordination mode employedAccording to equations (7) and (9) in Section 3 the dis-tributed decision-makersrsquo preferences are affected by thecost of effort and in particular by cost coefficient z
However in order to be clear and concise the simulationexperiments are conducted in two steps First to gain a basicunderstanding of the emergence of coordination in thebaseline scenarios the cost of effort is at a moderate levelz 0001 for all local decision-makers Second a sensitivityanalysis is conducted in whose course the cost of effort isvaried from costless effort (ie z 0) to higher levels of costof effort (ie zgt 0001) in order to analyze the effects of costof effort on the emergence of coordination
43 Metrics Employed for Analysis of Simulations In thebaseline scenarios with 2 interaction structures and 3 searchstrategies under investigation at a given level of cost of effort6 different scenarios of parameters are simulated For thesensitivity analysis 5 additional levels of cost of effort are
simulated which results in 30 further scenarios For each ofin sum the 36 scenarios 2500 simulations are run with 10runs on 250 performance landscapes
+e research question of this paper boils down to thequestion which coordination modes emerge predominantlyfor which contingencies in terms of complexity searchstrategy and cost of effort Hence for answering this questionthe key metric is the relative frequencies of the coordinationmodes in the end of the observation period t 750
Moreover the relative frequencies of coordinationmodes over observation time are depicted +is allows togain an understanding of how their relative shares evolve inthe course of growth and learning
As described in Section 35 the propensities to opt for theone or the other mode of coordination is shaped by theperformance gains achieved under the current mode in thelast TL periods Hence the level of performance according toequations (2) and (4) respectively in Section 31 ie the finalperformance achieved at the end of the observation period forthe different coordination modes is of interest For this the2500 simulations for each scenario were grouped accordingto that mode of coordination which was ldquoactiverdquo (ie hasemerged) in the last period t 750 of the observation time
+ese subgroups were analyzed individually and inparticular the mean of the final performance Vt750 achievedfor each coordination mode selected at t 750 is computed aswell as the respective confidence interval at a 999 level ofconfidence
Moreover another metric informing about the effec-tiveness of the search processes is the relative frequency of theglobal maximum found in t 750 of the respective per-formance landscape which is computed for each subgroup(based on the coordination mode in t 750) separately
In order to gain some deeper understanding of the searchprocesses conducted by the DDMS two further metrics wereobserved and analyzed for each subgroup the ratio of periods inwhich the status quo is altered and the ratio of periods with false-positive alterations ie alterations in favor of a false-positiveoption (ie reducing Vt) to the T 750 periods of observation+ese metrics put some focus on the efficiency of search
5 Results and Discussion
+e results are presented in two steps First for gaining a basicunderstanding of the effects of intraorganizational complexityand search strategy on the emergence of coordination thebaseline scenarios are presented and analyzed (Section 51)While in the baseline scenarios the distributed decision-makers operate at a rather moderate though nonzero level ofcost of effort the sensitivity analysis (Section 52) illustrates theeffect of cost of effort at the local decision-makersrsquo side on thecoordination mode emerging at the systemrsquos level
51 Complexity and Search Strategy Baseline Scenarios
511 Overview For the baseline scenarios Table 3 displayscondensed results obtained from the simulation experimentsaccording to the metrics introduced in Section 43 In ad-dition Table 4 reports on the significances of mean
Complexity 13
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Based on the evaluation of options each decision-maker
r compiles a list Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 of preferences
where drp1t
rarrindicates the most preferred option out of
drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarr Correspondingly d
rp2t
rarrdenotes the
second-most and drp3t
rarrthe third-most preferred option
34CoordinationModes for SynthesizingPlans As a result ofthe search and (imperfect) evaluation of options so far eachdistributed decision-maker has an ordered list Lr
t of pref-erences which in terms of multiagent systems reflects theindividual [2] or local plan [69] +e next step within eachperiod t is to come to a decision on the organizationrsquos overallproblem dt
rarr ie to merge the decentralized decision-makersrsquo
preferences on drt
rarrcaptured in the Ms lists Lr
t into the overallconfiguration dt
rarr +is requires to employ a mode of co-
ordination for synthesizing the local plansmdashand the verycore of this paper is to study which mode emerges underwhich conditions of search strategy and cost of effort
As it was outlined in Section 2 a multitude of modes forsynthesizing local plans has been proposed in various do-mains Out of the numerous feasible mechanisms the modelcomprises three modes which could represent particularpronounced (for not to say ldquoextremerdquo) forms of co-ordination regarding
(i) (de-)centralization in terms of (locus of) authority(ii) direction of alignment ie lateral vs vertical(iii) parallelization vs sequencing of final decision re-
garding the local plans
In particular the three types of coordination captured inthe model (see Table 1) differ in the communicationchannels (the model assumes that communication in thecourse of coordination works perfectly for an investigationof the effects of unintended communications errors see[86]) the information employed in decision-making thelocus of final decision-making and in the end the tightnessof coordination provided (for an overview and furthermodes see eg [2 57 69 87 88])
341 Decentralized Mode +e highest level of autonomy isgranted to the Ms distributed decision-makers if each ofthem is allowed to choose its most preferred option +enthe overall organizational configuration dt
rarrresults from
dt
rarr d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr1113874 1113875 (10)
Hence for decision-maker rrsquos partial decision problemNr
s the option according to
drlowastt
rarr d
rp1t
rarrforallr isin 1 Ms1113864 1113865 (11)
is implemented Obviously this type of coordination doesnot require any form of communication between thedecentralized decision-makers or with the headquarter(central agent) +e headquarter does not intervene in de-cision-making directly and its role is limited to registering
the achieved performances Vt(dt
rarr) and Pr
t (drt
rarr) in the end of
each period t and eventually to reward the decentralizeddecision-makers accordingly
342 Sequential Mode +is mode captures the idea ofldquosequential planningrdquo +e distributed decision-makersmake their final choices sequentially with for the sake ofsimplicity the sequence being given by the index r of thedecision-makers In particular in time step t decision-makerr minus 1 informs decision-maker r with 1lt rleMs about thechoices made so far ie made by the ldquoprecedingrdquo decision-makers lt r Decision-maker rgt 1 re-evaluates its ldquoownrdquo
options drlowasttminus 1
rarr d
ra1t
rarr and d
ra2t
rarrtaking these ldquopriorrdquo choices into
accountmdashpotentially resulting in an adjusted list of pref-
erences Lrt d
rp1t
rarr d
rp2t
rarr d
rp3t
rarr1113882 1113883 and chooses d
rp1t
rarrwhich
here depends on drminus 1p1t
rarr ie is a function of the choices of
the preceding decision-makers Hence only decision-maker1 does not have to consider previous choices and the choiceof decision-maker r (1 Ms) is made according to
drlowastt
rarr
drp1t
rarr if r 1
drp1t
rarrd
rminus 1p1t
rarr1113874 1113875 if 1lt rleΜ
⎧⎪⎪⎨
⎪⎪⎩(12)
and with equation (12) the overall configuration is given by
dt
rarr d
Mlowastt
rarr+e headquarter (type 2 agent) does not intervene
in decision-making andmdashsimilar to the decentralizedmodemdashis confined to observing the performances achievedand eventually rewarding the decentralized decision-makers accordingly
343 Proposal Mode Each local decision-maker transfersits list Lr
t of preferences to the headquarter which compilesthe first preferences to a composite vector
dC
rarr (d
1p1t
rarr d
rp1t
rarr d
Msp1t
rarr) and then evaluates the
overall performance V(dC
rarr) (see equation (4)) that this
solution promisesHowever as with decentralized decision-makers in the
model it is assumed that the headquarter is not capable toperfectly ex-ante evaluate new options ie other solutionsthan the status quo (see Section 32) Rather similar to thelocal decision-makers the headquarter suffers from somerelative noise following a Gaussian distribution with ex-pected value 0 and standard deviations σcent resulting in a
perceived overall performance 1113957V(dC
rarr) +e headquarter
8 Complexity
decides in favor of the composite vector ie dt
rarr d
Crarr
if dC
rarr
promises the same or a higher performance as the status quodtminus 1rarr
ie if
1113957V dC
rarr1113888 1113889geV d
lowasttminus 1
rarr1113874 1113875 (13)
If the composite vector dC
rarrassembled from the local
decision-makersrsquo first preferences does not meet the con-dition in equation (13) the headquarter evaluates a vectorcomposed from the decentralized decision-makersrsquo secondpreferences according to equation (13) If this also does notat least promise the performance of the status quo then theorganization stays with the status quo ie then dt
rarr dtminus 1
rarr
35 Learning-Based Adaptation of Coordination +e verycore of this research endeavor is to study which modes ofcoordination emerge within growth processes of the artificialorganizations In order to capture some kind of self-adap-tation of coordination the model employs a simple mode ofreinforcement learning (for overviews see [89 90]) based onstatistical learning ie a generalized form of the BushndashMosteller model [91 92]
+is mode of learning is chosen for the following rea-sons In the vast multitude of forms of learning studied invarious domains (eg psychology economics and com-puter science) reinforcement learning is regarded to beamong the most basic forms of learning [92] It represents afundamental possible form of humansrsquo behavior but alsoprovides some basis for learning of artificial agents [90]mdashboth regarded as DDMS in this paper Moreover in thismodel as a form of experiential learning the mid-termedreinforcement learning on the coordination mode corre-sponds to the experiential type of short-termed adaptation[60] when the decision-making systems in every single time-step search for a superior solution compared to the statusquo However it would be a natural extension of the modelto let the DDMS employ other and in particular more
advanced forms of learning about which mode of co-ordination is appropriate within the stage of growth and forthe search strategy employed and the cost of effort
In the model reinforcement learning on coordination forsynthesizing local plans is represented in the following way Inthe end of each time step t the central agent (type 2 agent seeSection 32) receives information about the overall perfor-mance Vt according to equation (4) +is allows the centralagent in every TLth period to compute the performanceenhancements achieved within the last TL periods Moreoverin every TLth period the organizations can alter the type ofcoordination mode as introduced in Section 34 Hence ourDDMS face the mid-termed decision-problem which type ofcoordination mode ac(t) isin Ac (with |Ac| 3 see Section 34)to implement in the next TL periods Let p(ac t) denote theprobability of an alternative ac(t) to be chosen at time t (with0lep(ac t)le 1 and 1113936aacisinAc (p(ac t)) 1)
+e key idea of reinforcement learning is that theprobabilities of options are updated according to the positiveor negative stimuli resulting from these options In ourcontext whether the performance enhancement ΔVt ob-tained under the regime of a certain mode of coordinationac(t) in the previous TL periods is regarded positive ornegative depends on whether or not it at least equals anaspiration level v ΔVt of type ac(t) of coordination is de-fined as the relative performance enhancement achievedwithin the last TL periods of the adaptive walk ie
ΔVt Vt minus Vtminus TL
Vtminus TL
(14)
Hence the stimulus τ(t) is
τ(t) 1 if ΔVt ge v
minus 1 if ΔVt lt v1113896 (15)
+e probabilities of options ac isin Ac are updatedaccording to the following rule with λ (where 0le λle 1)giving the reinforcement strength [92]
Table 1 Overview of the modes of coordination in the model
Type of coordination modeDecentralized Sequential Proposal
Lateral communication No Yes NoVertical communication No No YesHeadquarter intervening No No YesRe-evaluation of local plans No Yes Yes
Information employed for finaldecisions
Expected parochialperformance
Expected parochial performancetaking predecessorrsquos choices into
account
Expected organization-wideaggregated performance
Locus of final decisions on localplans Decentralized Decentralized Centralized
Temporal order of final decisionson local plans In parallel Asynchronously (in sequence) Synchronously (ldquoat oncerdquo)
Final configurations for distributeddecision-makersrsquo sub-problems
First preferences
drp1t
rarrforallr isin 1 Ms1113864 1113865
First preferences subject topreceding decision-makersrsquo
choices ie drp1t
rarr(d
rminus 1p1t
rarr) for rgt 1
drp1t
rarrfor r 1
First (or second) preferences drp1t
rarr
[or drp2t
rarr] if 1113957V(d
Crarr
)geV(dtminus 1rarr
)
Complexity 9
p ac t + 1( 1113857 p a
c t( 1113857 + λ middot
1 minus p ac t( )( 1113857 if ac ac(t)and τ(t) 1
minus p ac t( ) if ac ac(t)and τ(t) minus 1
minus p ac t( ) if ac ne ac(t)and τ(t) 1
p ac t( ) middot p ac(t) t( )
1 minus p ac(t) t( ) if ac ne ac(t)and τ(t) minus 1
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(16)
After the probabilities are updated as given in equation(16) the ldquonextrdquo mode of coordination to be employed fromt + 1 to t + TL is determined at randommdashaccording to theupdated probabilities
4 Simulation Experiments ProcessualStructure Parameters and Analysis
+is section is intended to introduce the principle structureof the simulation experiments based on the theoreticalmodel as presented in the previous Section 3 For this firstSection 41 gives an overview of the principle processualstructure of the simulations before the parameters settingsare motivated (Section 42) and the metrics employed foranalysis of experiments are introduced (Section 43)
41 Process Overview of the Simulation Model Figure 2depicts the principle processual structure of the simula-tion model based on the theoretical model as introduced inthe previous Section 3 In particular the simulation in itscore is characterized by three loops capturing three temporalhorizons
In the short term in each time step t the artificial or-ganizations search for superior solutions of their Ns-di-mensional decision-problem where the overall problem issegmented into Ms sub-problems with each delegated to Ms
local decision-making agents accordingly (type 1 agents inSection 32) In the mid-term ie in each TLth time step thecentral unit (type 2 agent) evaluates the current mode ofcoordination learns from this evaluation via reinforcementand eventually chooses another mode of coordination forthe next TL periods In the long term in every TGth timestep the decision-problem grows by a fixed number Nr
s ofadditional single choices to be made and the number Ms ofdistributed decision-makers increases by 1 (for details seeSection 31)
42 Parameter Settings
421 Parameters Fixed for all Experiments In the simula-tion experimentsmdashparameter settings are listed inTable 2mdashorganizations are observed over T 750 periodswhere in every TL 10th period eventually the mode ofcoordination is switched (the observation period T and thelearning interval TL 10 were fixed based on pretests whichindicate that the results do not principally change when theorganizations are observed for a longer time the similar
holds for an extension of the learning interval (eg toTL 20) however shortening the learning period notablybelow 10 periods does not leave the different coordinationmodes ldquoenough timerdquo to unfold their particular potentialwith respect to the aspiration level)
In every TG 250th period the organizations undergo agrowth in problem space as well as in the number of dis-tributed decision-makers
(i) In their first growth stage the organizations face anNs1 6-dimensional overall decision-problemdecomposed into two sub-problems of equal size(ie Nr
s1 3forallr isin 1 2 ) assigned to two decision-makers (Ms1 2) accordingly
(ii) In the second growth stage (ie fromt 251 to 500) three additional binary choices areto be made by the organizations for which oneadditional local decision-maker is responsi-blemdashhence the organizations comprise 3 decen-tralized decision-makers ie Ms2 3
(iii) In the third stage the decision-problem grows bythree further binary choices and hence finally theorganizations deal with an Ns3 12-dimensionalproblem and a fourth decentralized decision-makercomes into play (Ms3 4)
+e simulations are run for a moderate level of noisecaptured by parameters σr and σcent relevant for the ex-anteevaluations of options by the local decision-makers and incase of the proposal mode the central agent respectively (seeSections 32 and 343) It is assumed that the information ofthe local decision-makersmdashonly related to their respectiveNr-dimensional sub-problemsmdashare more precise than theinformation of the central unit which is related to the entireNs-dimensional decision problem (ie σr lt σcent) +is isintended to capture differentiation and specialization [8 93]due to division of labor Some empirical evidence suggeststhat noise of about 10 of the true value in the domain ofmanagement control is at a reasonable range [94]
+e modes of coordination which the organizationschoose of are motivated and introduced in Section 34 +eorganizations employ the same initial mode of coordinationnamely the ldquodecentralizedrdquo mode +is ldquosetuprdquo procedure ischosen to make sure that the adaptive processes start from aldquodefinedrdquo initial configuration and without having thelearning processes overlaid by the strong performance en-hancements that are typically made in the very first periodsof the adaptive walks (notwithstanding further simulations
10 Complexity
have shown that the overlaying effects appear to be rathernegligible) However an intuitive ldquostoryrdquo behind this setupprocedure is that the organizations start in fact without any
particular mode of coordination ie the decentralizedmode(for example because they were newly founded) and keepthis until time t 10 in this period they ldquodiscoverrdquo the two
Yes
No
Yes No
Yes No
No
Yes
Decrease of propensities of current mode of coordination to be chosen for the next TL
periods (and increase of propensities of others)
Determination of mode of coordination implemented in the next TL periods according to updated propensities
Central agent evaluates performance enhancement achievedwith the current mode of coordination in the last TL periods
Time step t = 0 growth stage s = 1number of distributed decision-making agents MS=1 = 2
Generation of a performance landscape according to the interaction structureat the first growth stage
Random-driven determination of the initial configuration dt=0 of the overalldecision-problem
Extension of performance landscape according to the interaction structure at the ldquonewrdquo growth stage s increase of number of distributed decision-making
agents by 1 ie MS = MS + 1
t = t + 1
Growth stage s = s + 1
Each distributed decision-maker r discovers alternatives a1 and a2 to the statusquo of the partial problem which is delegated to this decision-maker r
and forms its preferences (local plans)
Overall configuration dt is determined from the local plans according to the current mode of coordination
Central agent determines performance Vt obtained with configuration dt
Increase of propensities of current mode ofcoordination to be chosen for the next TL periods
(and decrease of propensities of others)
t mod TL = 0
t mod TG = 0
Positive feedback
t gt T Stop
Start
Figure 2 Principle processual structure of the simulation model
Complexity 11
alternative modes and choose randomly one option ac isin Ac
out of the three options (ie |Ac| 3) where each mode hasthe same initial probability 1|Ac| +en in every TL 10thperiod probabilities are adjusted according to the perfor-mance enhancements +e parameters for learning corre-spond to a moderate strength of learning [95] On basis ofthe updated probabilities eventually a new coordinationmode is established
422 Contingency Factors Parameters Subject to Variationacross Experiments As argued in the Introduction thisresearch effort takes a contingency perspective and inparticular intends to study the interacting effects of (1)complexity of decision-problem (2) search strategy and (3)cost of effort Accordingly these three contingent factors aresubject to variation across simulation experiments (see alsothe lower part in Table 2)
(1) Complexity of Decision-Problem In line with the idea offactorial design of simulation experiments [96] the exper-iments distinguish between two different levels of
complexity of the decision problem to be solved by theorganizations which capture two rather pronounced cases
Based on the seminal work of Simon [16] on the ar-chitecture of complexity (near) decomposability as com-pared to nondecomposability is the key aspect in theunderstanding of complexity (see also Introduction)Against this background the simulations are run for agrowing decomposable and a growing nondecomposableinteraction structure where the principle ldquotyperdquo of com-plexity is kept over the growth stages Hence the growthprocesses simulated may capture some kind of organicgrowth [97ndash99] Figure 1 provides a graphical representationof interaction matrices of the growing decision-problemswhich could capture the following situations (in the sim-ulation experiments the number of decision-makers mirrorsthe growth of the decision-problem for avoiding interferencewith effects of varying size of decision-makersrsquo scope ofcompetency (for further references see [55 100 101]))
(i) ldquodecomposablerdquo (Figure 1(a)) +is type of organi-zation and growth relates to the idea of an organi-zation consisting of self-contained ldquosub-problemsrdquo
Table 2 Parameter settings
Parameter ValuestypesParameters fixed for all experiments (see Section 421)Observation period T 750Interval of learning TL 10Interval of growth stages TG 250Growth stages s 1 2 3
Number of choicesIn growth stage s 1 Ns1 6In growth stage s 2 Ns2 9In growth stage s 3 Ns3 12
Number Ms of distributed decision-makers
In growth stage s 1 M1 2 distributed
decision-makers with sub-problems d1
rarr (d1 d2 d3)
and d2
rarr (d4 d5 d6)
In growth stage s 2 M2 3 ie one additional
distributed decision-maker 3 with sub-problem d3
rarr
(d7 d8 d9)
In growth stage s 3 M3 4 ie one furtheradditional decision-maker 4 with sub-problem
d4
rarr (d10 d11 d12)
Precision of ex-ante evaluation Distributed decision-makers σr 005forallrCentral agent (headquarter) σcent 01
Modes of coordination ac isin Ac ldquodecentralized rdquo ldquosequential rdquo ldquoproposalrdquo1113864 1113865
Aspiration level v 0Learning strength λ 05Parameters subject to variation across experiments (see Section 422)
Complexity of decision problem ldquoDecomposablerdquo ldquonondecomposablerdquofor details of interaction structures see Figure 1
Search strategy
ldquoExploitation onlyrdquo h(dra1
rarr) 1 and h(d
ra2rarr
) 1
ldquoExploitation and explorationrdquo h(dra1
rarr) 1 and
h(dra2
rarr) 2
ldquoExploration onlyrdquo h(dra1
rarr) 2 and h(d
ra2rarr
) 2
Cost of effort (cost coefficient) Baseline scenarios z 0001Sensitivity analysis z isin 0 0003 0005 001 002
12 Complexity
or ldquounitsrdquo [7 8] which have intense intra-unit in-teractions but no cross-unit interactions In the be-ginning the organizationrsquos overall decision-problemis decomposable into 2 distinct sub-problems [17]which for example might be related to differentproducts without any interrelations between themFor the 2 products 2 business units are responsible Inthe course of the growth stages the organizationldquoaddsrdquo further products and business units corre-spondingly without interrelations among the ldquooldrdquoand ldquonewrdquo products and accordingly the units
(ii) ldquonondecomposablerdquo (example given in Figure 1(b))+is case of interactionsmay capture whatmdashaccordingto the prominent classification of +ompson [7]mdashiscalled reciprocal interdependencies In particular thisstructure could represent an organization with func-tional specialization showing the typical high level ofinterrelations between sub-problemsmdashand de-partments accordingly In the course of growth it maybe that the vertical integration is increased (egestablishing an inhouse production of certain in-termediate products or sales logistics)
(2) Search Strategy As described in Section 332 thedecentralized decision-makers employ one of three funda-mental search strategies which are intended to capture ex-ploitation exploration and an ambidextrous strategy [20] asenforced by the boundary systemmdasheach characterized by thenumber of options and the Hamming distances allowed Forexample if an exploration strategy is pursued with M3 4local decision-makers and N3 12 in the final growth stageat maximum 8 digits of the overall decision-problem couldbe flipped ie two-thirds of the configuration dt
rarrcould be
altered in one time step
(3) Cost of Effort While the search strategy shapes themaximum of binary choices that could be flipped the actualalterations are affected by the local decision-makersrsquo pref-erences together with the coordination mode employedAccording to equations (7) and (9) in Section 3 the dis-tributed decision-makersrsquo preferences are affected by thecost of effort and in particular by cost coefficient z
However in order to be clear and concise the simulationexperiments are conducted in two steps First to gain a basicunderstanding of the emergence of coordination in thebaseline scenarios the cost of effort is at a moderate levelz 0001 for all local decision-makers Second a sensitivityanalysis is conducted in whose course the cost of effort isvaried from costless effort (ie z 0) to higher levels of costof effort (ie zgt 0001) in order to analyze the effects of costof effort on the emergence of coordination
43 Metrics Employed for Analysis of Simulations In thebaseline scenarios with 2 interaction structures and 3 searchstrategies under investigation at a given level of cost of effort6 different scenarios of parameters are simulated For thesensitivity analysis 5 additional levels of cost of effort are
simulated which results in 30 further scenarios For each ofin sum the 36 scenarios 2500 simulations are run with 10runs on 250 performance landscapes
+e research question of this paper boils down to thequestion which coordination modes emerge predominantlyfor which contingencies in terms of complexity searchstrategy and cost of effort Hence for answering this questionthe key metric is the relative frequencies of the coordinationmodes in the end of the observation period t 750
Moreover the relative frequencies of coordinationmodes over observation time are depicted +is allows togain an understanding of how their relative shares evolve inthe course of growth and learning
As described in Section 35 the propensities to opt for theone or the other mode of coordination is shaped by theperformance gains achieved under the current mode in thelast TL periods Hence the level of performance according toequations (2) and (4) respectively in Section 31 ie the finalperformance achieved at the end of the observation period forthe different coordination modes is of interest For this the2500 simulations for each scenario were grouped accordingto that mode of coordination which was ldquoactiverdquo (ie hasemerged) in the last period t 750 of the observation time
+ese subgroups were analyzed individually and inparticular the mean of the final performance Vt750 achievedfor each coordination mode selected at t 750 is computed aswell as the respective confidence interval at a 999 level ofconfidence
Moreover another metric informing about the effec-tiveness of the search processes is the relative frequency of theglobal maximum found in t 750 of the respective per-formance landscape which is computed for each subgroup(based on the coordination mode in t 750) separately
In order to gain some deeper understanding of the searchprocesses conducted by the DDMS two further metrics wereobserved and analyzed for each subgroup the ratio of periods inwhich the status quo is altered and the ratio of periods with false-positive alterations ie alterations in favor of a false-positiveoption (ie reducing Vt) to the T 750 periods of observation+ese metrics put some focus on the efficiency of search
5 Results and Discussion
+e results are presented in two steps First for gaining a basicunderstanding of the effects of intraorganizational complexityand search strategy on the emergence of coordination thebaseline scenarios are presented and analyzed (Section 51)While in the baseline scenarios the distributed decision-makers operate at a rather moderate though nonzero level ofcost of effort the sensitivity analysis (Section 52) illustrates theeffect of cost of effort at the local decision-makersrsquo side on thecoordination mode emerging at the systemrsquos level
51 Complexity and Search Strategy Baseline Scenarios
511 Overview For the baseline scenarios Table 3 displayscondensed results obtained from the simulation experimentsaccording to the metrics introduced in Section 43 In ad-dition Table 4 reports on the significances of mean
Complexity 13
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

decides in favor of the composite vector ie dt
rarr d
Crarr
if dC
rarr
promises the same or a higher performance as the status quodtminus 1rarr
ie if
1113957V dC
rarr1113888 1113889geV d
lowasttminus 1
rarr1113874 1113875 (13)
If the composite vector dC
rarrassembled from the local
decision-makersrsquo first preferences does not meet the con-dition in equation (13) the headquarter evaluates a vectorcomposed from the decentralized decision-makersrsquo secondpreferences according to equation (13) If this also does notat least promise the performance of the status quo then theorganization stays with the status quo ie then dt
rarr dtminus 1
rarr
35 Learning-Based Adaptation of Coordination +e verycore of this research endeavor is to study which modes ofcoordination emerge within growth processes of the artificialorganizations In order to capture some kind of self-adap-tation of coordination the model employs a simple mode ofreinforcement learning (for overviews see [89 90]) based onstatistical learning ie a generalized form of the BushndashMosteller model [91 92]
+is mode of learning is chosen for the following rea-sons In the vast multitude of forms of learning studied invarious domains (eg psychology economics and com-puter science) reinforcement learning is regarded to beamong the most basic forms of learning [92] It represents afundamental possible form of humansrsquo behavior but alsoprovides some basis for learning of artificial agents [90]mdashboth regarded as DDMS in this paper Moreover in thismodel as a form of experiential learning the mid-termedreinforcement learning on the coordination mode corre-sponds to the experiential type of short-termed adaptation[60] when the decision-making systems in every single time-step search for a superior solution compared to the statusquo However it would be a natural extension of the modelto let the DDMS employ other and in particular more
advanced forms of learning about which mode of co-ordination is appropriate within the stage of growth and forthe search strategy employed and the cost of effort
In the model reinforcement learning on coordination forsynthesizing local plans is represented in the following way Inthe end of each time step t the central agent (type 2 agent seeSection 32) receives information about the overall perfor-mance Vt according to equation (4) +is allows the centralagent in every TLth period to compute the performanceenhancements achieved within the last TL periods Moreoverin every TLth period the organizations can alter the type ofcoordination mode as introduced in Section 34 Hence ourDDMS face the mid-termed decision-problem which type ofcoordination mode ac(t) isin Ac (with |Ac| 3 see Section 34)to implement in the next TL periods Let p(ac t) denote theprobability of an alternative ac(t) to be chosen at time t (with0lep(ac t)le 1 and 1113936aacisinAc (p(ac t)) 1)
+e key idea of reinforcement learning is that theprobabilities of options are updated according to the positiveor negative stimuli resulting from these options In ourcontext whether the performance enhancement ΔVt ob-tained under the regime of a certain mode of coordinationac(t) in the previous TL periods is regarded positive ornegative depends on whether or not it at least equals anaspiration level v ΔVt of type ac(t) of coordination is de-fined as the relative performance enhancement achievedwithin the last TL periods of the adaptive walk ie
ΔVt Vt minus Vtminus TL
Vtminus TL
(14)
Hence the stimulus τ(t) is
τ(t) 1 if ΔVt ge v
minus 1 if ΔVt lt v1113896 (15)
+e probabilities of options ac isin Ac are updatedaccording to the following rule with λ (where 0le λle 1)giving the reinforcement strength [92]
Table 1 Overview of the modes of coordination in the model
Type of coordination modeDecentralized Sequential Proposal
Lateral communication No Yes NoVertical communication No No YesHeadquarter intervening No No YesRe-evaluation of local plans No Yes Yes
Information employed for finaldecisions
Expected parochialperformance
Expected parochial performancetaking predecessorrsquos choices into
account
Expected organization-wideaggregated performance
Locus of final decisions on localplans Decentralized Decentralized Centralized
Temporal order of final decisionson local plans In parallel Asynchronously (in sequence) Synchronously (ldquoat oncerdquo)
Final configurations for distributeddecision-makersrsquo sub-problems
First preferences
drp1t
rarrforallr isin 1 Ms1113864 1113865
First preferences subject topreceding decision-makersrsquo
choices ie drp1t
rarr(d
rminus 1p1t
rarr) for rgt 1
drp1t
rarrfor r 1
First (or second) preferences drp1t
rarr
[or drp2t
rarr] if 1113957V(d
Crarr
)geV(dtminus 1rarr
)
Complexity 9
p ac t + 1( 1113857 p a
c t( 1113857 + λ middot
1 minus p ac t( )( 1113857 if ac ac(t)and τ(t) 1
minus p ac t( ) if ac ac(t)and τ(t) minus 1
minus p ac t( ) if ac ne ac(t)and τ(t) 1
p ac t( ) middot p ac(t) t( )
1 minus p ac(t) t( ) if ac ne ac(t)and τ(t) minus 1
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(16)
After the probabilities are updated as given in equation(16) the ldquonextrdquo mode of coordination to be employed fromt + 1 to t + TL is determined at randommdashaccording to theupdated probabilities
4 Simulation Experiments ProcessualStructure Parameters and Analysis
+is section is intended to introduce the principle structureof the simulation experiments based on the theoreticalmodel as presented in the previous Section 3 For this firstSection 41 gives an overview of the principle processualstructure of the simulations before the parameters settingsare motivated (Section 42) and the metrics employed foranalysis of experiments are introduced (Section 43)
41 Process Overview of the Simulation Model Figure 2depicts the principle processual structure of the simula-tion model based on the theoretical model as introduced inthe previous Section 3 In particular the simulation in itscore is characterized by three loops capturing three temporalhorizons
In the short term in each time step t the artificial or-ganizations search for superior solutions of their Ns-di-mensional decision-problem where the overall problem issegmented into Ms sub-problems with each delegated to Ms
local decision-making agents accordingly (type 1 agents inSection 32) In the mid-term ie in each TLth time step thecentral unit (type 2 agent) evaluates the current mode ofcoordination learns from this evaluation via reinforcementand eventually chooses another mode of coordination forthe next TL periods In the long term in every TGth timestep the decision-problem grows by a fixed number Nr
s ofadditional single choices to be made and the number Ms ofdistributed decision-makers increases by 1 (for details seeSection 31)
42 Parameter Settings
421 Parameters Fixed for all Experiments In the simula-tion experimentsmdashparameter settings are listed inTable 2mdashorganizations are observed over T 750 periodswhere in every TL 10th period eventually the mode ofcoordination is switched (the observation period T and thelearning interval TL 10 were fixed based on pretests whichindicate that the results do not principally change when theorganizations are observed for a longer time the similar
holds for an extension of the learning interval (eg toTL 20) however shortening the learning period notablybelow 10 periods does not leave the different coordinationmodes ldquoenough timerdquo to unfold their particular potentialwith respect to the aspiration level)
In every TG 250th period the organizations undergo agrowth in problem space as well as in the number of dis-tributed decision-makers
(i) In their first growth stage the organizations face anNs1 6-dimensional overall decision-problemdecomposed into two sub-problems of equal size(ie Nr
s1 3forallr isin 1 2 ) assigned to two decision-makers (Ms1 2) accordingly
(ii) In the second growth stage (ie fromt 251 to 500) three additional binary choices areto be made by the organizations for which oneadditional local decision-maker is responsi-blemdashhence the organizations comprise 3 decen-tralized decision-makers ie Ms2 3
(iii) In the third stage the decision-problem grows bythree further binary choices and hence finally theorganizations deal with an Ns3 12-dimensionalproblem and a fourth decentralized decision-makercomes into play (Ms3 4)
+e simulations are run for a moderate level of noisecaptured by parameters σr and σcent relevant for the ex-anteevaluations of options by the local decision-makers and incase of the proposal mode the central agent respectively (seeSections 32 and 343) It is assumed that the information ofthe local decision-makersmdashonly related to their respectiveNr-dimensional sub-problemsmdashare more precise than theinformation of the central unit which is related to the entireNs-dimensional decision problem (ie σr lt σcent) +is isintended to capture differentiation and specialization [8 93]due to division of labor Some empirical evidence suggeststhat noise of about 10 of the true value in the domain ofmanagement control is at a reasonable range [94]
+e modes of coordination which the organizationschoose of are motivated and introduced in Section 34 +eorganizations employ the same initial mode of coordinationnamely the ldquodecentralizedrdquo mode +is ldquosetuprdquo procedure ischosen to make sure that the adaptive processes start from aldquodefinedrdquo initial configuration and without having thelearning processes overlaid by the strong performance en-hancements that are typically made in the very first periodsof the adaptive walks (notwithstanding further simulations
10 Complexity
have shown that the overlaying effects appear to be rathernegligible) However an intuitive ldquostoryrdquo behind this setupprocedure is that the organizations start in fact without any
particular mode of coordination ie the decentralizedmode(for example because they were newly founded) and keepthis until time t 10 in this period they ldquodiscoverrdquo the two
Yes
No
Yes No
Yes No
No
Yes
Decrease of propensities of current mode of coordination to be chosen for the next TL
periods (and increase of propensities of others)
Determination of mode of coordination implemented in the next TL periods according to updated propensities
Central agent evaluates performance enhancement achievedwith the current mode of coordination in the last TL periods
Time step t = 0 growth stage s = 1number of distributed decision-making agents MS=1 = 2
Generation of a performance landscape according to the interaction structureat the first growth stage
Random-driven determination of the initial configuration dt=0 of the overalldecision-problem
Extension of performance landscape according to the interaction structure at the ldquonewrdquo growth stage s increase of number of distributed decision-making
agents by 1 ie MS = MS + 1
t = t + 1
Growth stage s = s + 1
Each distributed decision-maker r discovers alternatives a1 and a2 to the statusquo of the partial problem which is delegated to this decision-maker r
and forms its preferences (local plans)
Overall configuration dt is determined from the local plans according to the current mode of coordination
Central agent determines performance Vt obtained with configuration dt
Increase of propensities of current mode ofcoordination to be chosen for the next TL periods
(and decrease of propensities of others)
t mod TL = 0
t mod TG = 0
Positive feedback
t gt T Stop
Start
Figure 2 Principle processual structure of the simulation model
Complexity 11
alternative modes and choose randomly one option ac isin Ac
out of the three options (ie |Ac| 3) where each mode hasthe same initial probability 1|Ac| +en in every TL 10thperiod probabilities are adjusted according to the perfor-mance enhancements +e parameters for learning corre-spond to a moderate strength of learning [95] On basis ofthe updated probabilities eventually a new coordinationmode is established
422 Contingency Factors Parameters Subject to Variationacross Experiments As argued in the Introduction thisresearch effort takes a contingency perspective and inparticular intends to study the interacting effects of (1)complexity of decision-problem (2) search strategy and (3)cost of effort Accordingly these three contingent factors aresubject to variation across simulation experiments (see alsothe lower part in Table 2)
(1) Complexity of Decision-Problem In line with the idea offactorial design of simulation experiments [96] the exper-iments distinguish between two different levels of
complexity of the decision problem to be solved by theorganizations which capture two rather pronounced cases
Based on the seminal work of Simon [16] on the ar-chitecture of complexity (near) decomposability as com-pared to nondecomposability is the key aspect in theunderstanding of complexity (see also Introduction)Against this background the simulations are run for agrowing decomposable and a growing nondecomposableinteraction structure where the principle ldquotyperdquo of com-plexity is kept over the growth stages Hence the growthprocesses simulated may capture some kind of organicgrowth [97ndash99] Figure 1 provides a graphical representationof interaction matrices of the growing decision-problemswhich could capture the following situations (in the sim-ulation experiments the number of decision-makers mirrorsthe growth of the decision-problem for avoiding interferencewith effects of varying size of decision-makersrsquo scope ofcompetency (for further references see [55 100 101]))
(i) ldquodecomposablerdquo (Figure 1(a)) +is type of organi-zation and growth relates to the idea of an organi-zation consisting of self-contained ldquosub-problemsrdquo
Table 2 Parameter settings
Parameter ValuestypesParameters fixed for all experiments (see Section 421)Observation period T 750Interval of learning TL 10Interval of growth stages TG 250Growth stages s 1 2 3
Number of choicesIn growth stage s 1 Ns1 6In growth stage s 2 Ns2 9In growth stage s 3 Ns3 12
Number Ms of distributed decision-makers
In growth stage s 1 M1 2 distributed
decision-makers with sub-problems d1
rarr (d1 d2 d3)
and d2
rarr (d4 d5 d6)
In growth stage s 2 M2 3 ie one additional
distributed decision-maker 3 with sub-problem d3
rarr
(d7 d8 d9)
In growth stage s 3 M3 4 ie one furtheradditional decision-maker 4 with sub-problem
d4
rarr (d10 d11 d12)
Precision of ex-ante evaluation Distributed decision-makers σr 005forallrCentral agent (headquarter) σcent 01
Modes of coordination ac isin Ac ldquodecentralized rdquo ldquosequential rdquo ldquoproposalrdquo1113864 1113865
Aspiration level v 0Learning strength λ 05Parameters subject to variation across experiments (see Section 422)
Complexity of decision problem ldquoDecomposablerdquo ldquonondecomposablerdquofor details of interaction structures see Figure 1
Search strategy
ldquoExploitation onlyrdquo h(dra1
rarr) 1 and h(d
ra2rarr
) 1
ldquoExploitation and explorationrdquo h(dra1
rarr) 1 and
h(dra2
rarr) 2
ldquoExploration onlyrdquo h(dra1
rarr) 2 and h(d
ra2rarr
) 2
Cost of effort (cost coefficient) Baseline scenarios z 0001Sensitivity analysis z isin 0 0003 0005 001 002
12 Complexity
or ldquounitsrdquo [7 8] which have intense intra-unit in-teractions but no cross-unit interactions In the be-ginning the organizationrsquos overall decision-problemis decomposable into 2 distinct sub-problems [17]which for example might be related to differentproducts without any interrelations between themFor the 2 products 2 business units are responsible Inthe course of the growth stages the organizationldquoaddsrdquo further products and business units corre-spondingly without interrelations among the ldquooldrdquoand ldquonewrdquo products and accordingly the units
(ii) ldquonondecomposablerdquo (example given in Figure 1(b))+is case of interactionsmay capture whatmdashaccordingto the prominent classification of +ompson [7]mdashiscalled reciprocal interdependencies In particular thisstructure could represent an organization with func-tional specialization showing the typical high level ofinterrelations between sub-problemsmdashand de-partments accordingly In the course of growth it maybe that the vertical integration is increased (egestablishing an inhouse production of certain in-termediate products or sales logistics)
(2) Search Strategy As described in Section 332 thedecentralized decision-makers employ one of three funda-mental search strategies which are intended to capture ex-ploitation exploration and an ambidextrous strategy [20] asenforced by the boundary systemmdasheach characterized by thenumber of options and the Hamming distances allowed Forexample if an exploration strategy is pursued with M3 4local decision-makers and N3 12 in the final growth stageat maximum 8 digits of the overall decision-problem couldbe flipped ie two-thirds of the configuration dt
rarrcould be
altered in one time step
(3) Cost of Effort While the search strategy shapes themaximum of binary choices that could be flipped the actualalterations are affected by the local decision-makersrsquo pref-erences together with the coordination mode employedAccording to equations (7) and (9) in Section 3 the dis-tributed decision-makersrsquo preferences are affected by thecost of effort and in particular by cost coefficient z
However in order to be clear and concise the simulationexperiments are conducted in two steps First to gain a basicunderstanding of the emergence of coordination in thebaseline scenarios the cost of effort is at a moderate levelz 0001 for all local decision-makers Second a sensitivityanalysis is conducted in whose course the cost of effort isvaried from costless effort (ie z 0) to higher levels of costof effort (ie zgt 0001) in order to analyze the effects of costof effort on the emergence of coordination
43 Metrics Employed for Analysis of Simulations In thebaseline scenarios with 2 interaction structures and 3 searchstrategies under investigation at a given level of cost of effort6 different scenarios of parameters are simulated For thesensitivity analysis 5 additional levels of cost of effort are
simulated which results in 30 further scenarios For each ofin sum the 36 scenarios 2500 simulations are run with 10runs on 250 performance landscapes
+e research question of this paper boils down to thequestion which coordination modes emerge predominantlyfor which contingencies in terms of complexity searchstrategy and cost of effort Hence for answering this questionthe key metric is the relative frequencies of the coordinationmodes in the end of the observation period t 750
Moreover the relative frequencies of coordinationmodes over observation time are depicted +is allows togain an understanding of how their relative shares evolve inthe course of growth and learning
As described in Section 35 the propensities to opt for theone or the other mode of coordination is shaped by theperformance gains achieved under the current mode in thelast TL periods Hence the level of performance according toequations (2) and (4) respectively in Section 31 ie the finalperformance achieved at the end of the observation period forthe different coordination modes is of interest For this the2500 simulations for each scenario were grouped accordingto that mode of coordination which was ldquoactiverdquo (ie hasemerged) in the last period t 750 of the observation time
+ese subgroups were analyzed individually and inparticular the mean of the final performance Vt750 achievedfor each coordination mode selected at t 750 is computed aswell as the respective confidence interval at a 999 level ofconfidence
Moreover another metric informing about the effec-tiveness of the search processes is the relative frequency of theglobal maximum found in t 750 of the respective per-formance landscape which is computed for each subgroup(based on the coordination mode in t 750) separately
In order to gain some deeper understanding of the searchprocesses conducted by the DDMS two further metrics wereobserved and analyzed for each subgroup the ratio of periods inwhich the status quo is altered and the ratio of periods with false-positive alterations ie alterations in favor of a false-positiveoption (ie reducing Vt) to the T 750 periods of observation+ese metrics put some focus on the efficiency of search
5 Results and Discussion
+e results are presented in two steps First for gaining a basicunderstanding of the effects of intraorganizational complexityand search strategy on the emergence of coordination thebaseline scenarios are presented and analyzed (Section 51)While in the baseline scenarios the distributed decision-makers operate at a rather moderate though nonzero level ofcost of effort the sensitivity analysis (Section 52) illustrates theeffect of cost of effort at the local decision-makersrsquo side on thecoordination mode emerging at the systemrsquos level
51 Complexity and Search Strategy Baseline Scenarios
511 Overview For the baseline scenarios Table 3 displayscondensed results obtained from the simulation experimentsaccording to the metrics introduced in Section 43 In ad-dition Table 4 reports on the significances of mean
Complexity 13
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

p ac t + 1( 1113857 p a
c t( 1113857 + λ middot
1 minus p ac t( )( 1113857 if ac ac(t)and τ(t) 1
minus p ac t( ) if ac ac(t)and τ(t) minus 1
minus p ac t( ) if ac ne ac(t)and τ(t) 1
p ac t( ) middot p ac(t) t( )
1 minus p ac(t) t( ) if ac ne ac(t)and τ(t) minus 1
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(16)
After the probabilities are updated as given in equation(16) the ldquonextrdquo mode of coordination to be employed fromt + 1 to t + TL is determined at randommdashaccording to theupdated probabilities
4 Simulation Experiments ProcessualStructure Parameters and Analysis
+is section is intended to introduce the principle structureof the simulation experiments based on the theoreticalmodel as presented in the previous Section 3 For this firstSection 41 gives an overview of the principle processualstructure of the simulations before the parameters settingsare motivated (Section 42) and the metrics employed foranalysis of experiments are introduced (Section 43)
41 Process Overview of the Simulation Model Figure 2depicts the principle processual structure of the simula-tion model based on the theoretical model as introduced inthe previous Section 3 In particular the simulation in itscore is characterized by three loops capturing three temporalhorizons
In the short term in each time step t the artificial or-ganizations search for superior solutions of their Ns-di-mensional decision-problem where the overall problem issegmented into Ms sub-problems with each delegated to Ms
local decision-making agents accordingly (type 1 agents inSection 32) In the mid-term ie in each TLth time step thecentral unit (type 2 agent) evaluates the current mode ofcoordination learns from this evaluation via reinforcementand eventually chooses another mode of coordination forthe next TL periods In the long term in every TGth timestep the decision-problem grows by a fixed number Nr
s ofadditional single choices to be made and the number Ms ofdistributed decision-makers increases by 1 (for details seeSection 31)
42 Parameter Settings
421 Parameters Fixed for all Experiments In the simula-tion experimentsmdashparameter settings are listed inTable 2mdashorganizations are observed over T 750 periodswhere in every TL 10th period eventually the mode ofcoordination is switched (the observation period T and thelearning interval TL 10 were fixed based on pretests whichindicate that the results do not principally change when theorganizations are observed for a longer time the similar
holds for an extension of the learning interval (eg toTL 20) however shortening the learning period notablybelow 10 periods does not leave the different coordinationmodes ldquoenough timerdquo to unfold their particular potentialwith respect to the aspiration level)
In every TG 250th period the organizations undergo agrowth in problem space as well as in the number of dis-tributed decision-makers
(i) In their first growth stage the organizations face anNs1 6-dimensional overall decision-problemdecomposed into two sub-problems of equal size(ie Nr
s1 3forallr isin 1 2 ) assigned to two decision-makers (Ms1 2) accordingly
(ii) In the second growth stage (ie fromt 251 to 500) three additional binary choices areto be made by the organizations for which oneadditional local decision-maker is responsi-blemdashhence the organizations comprise 3 decen-tralized decision-makers ie Ms2 3
(iii) In the third stage the decision-problem grows bythree further binary choices and hence finally theorganizations deal with an Ns3 12-dimensionalproblem and a fourth decentralized decision-makercomes into play (Ms3 4)
+e simulations are run for a moderate level of noisecaptured by parameters σr and σcent relevant for the ex-anteevaluations of options by the local decision-makers and incase of the proposal mode the central agent respectively (seeSections 32 and 343) It is assumed that the information ofthe local decision-makersmdashonly related to their respectiveNr-dimensional sub-problemsmdashare more precise than theinformation of the central unit which is related to the entireNs-dimensional decision problem (ie σr lt σcent) +is isintended to capture differentiation and specialization [8 93]due to division of labor Some empirical evidence suggeststhat noise of about 10 of the true value in the domain ofmanagement control is at a reasonable range [94]
+e modes of coordination which the organizationschoose of are motivated and introduced in Section 34 +eorganizations employ the same initial mode of coordinationnamely the ldquodecentralizedrdquo mode +is ldquosetuprdquo procedure ischosen to make sure that the adaptive processes start from aldquodefinedrdquo initial configuration and without having thelearning processes overlaid by the strong performance en-hancements that are typically made in the very first periodsof the adaptive walks (notwithstanding further simulations
10 Complexity
have shown that the overlaying effects appear to be rathernegligible) However an intuitive ldquostoryrdquo behind this setupprocedure is that the organizations start in fact without any
particular mode of coordination ie the decentralizedmode(for example because they were newly founded) and keepthis until time t 10 in this period they ldquodiscoverrdquo the two
Yes
No
Yes No
Yes No
No
Yes
Decrease of propensities of current mode of coordination to be chosen for the next TL
periods (and increase of propensities of others)
Determination of mode of coordination implemented in the next TL periods according to updated propensities
Central agent evaluates performance enhancement achievedwith the current mode of coordination in the last TL periods
Time step t = 0 growth stage s = 1number of distributed decision-making agents MS=1 = 2
Generation of a performance landscape according to the interaction structureat the first growth stage
Random-driven determination of the initial configuration dt=0 of the overalldecision-problem
Extension of performance landscape according to the interaction structure at the ldquonewrdquo growth stage s increase of number of distributed decision-making
agents by 1 ie MS = MS + 1
t = t + 1
Growth stage s = s + 1
Each distributed decision-maker r discovers alternatives a1 and a2 to the statusquo of the partial problem which is delegated to this decision-maker r
and forms its preferences (local plans)
Overall configuration dt is determined from the local plans according to the current mode of coordination
Central agent determines performance Vt obtained with configuration dt
Increase of propensities of current mode ofcoordination to be chosen for the next TL periods
(and decrease of propensities of others)
t mod TL = 0
t mod TG = 0
Positive feedback
t gt T Stop
Start
Figure 2 Principle processual structure of the simulation model
Complexity 11
alternative modes and choose randomly one option ac isin Ac
out of the three options (ie |Ac| 3) where each mode hasthe same initial probability 1|Ac| +en in every TL 10thperiod probabilities are adjusted according to the perfor-mance enhancements +e parameters for learning corre-spond to a moderate strength of learning [95] On basis ofthe updated probabilities eventually a new coordinationmode is established
422 Contingency Factors Parameters Subject to Variationacross Experiments As argued in the Introduction thisresearch effort takes a contingency perspective and inparticular intends to study the interacting effects of (1)complexity of decision-problem (2) search strategy and (3)cost of effort Accordingly these three contingent factors aresubject to variation across simulation experiments (see alsothe lower part in Table 2)
(1) Complexity of Decision-Problem In line with the idea offactorial design of simulation experiments [96] the exper-iments distinguish between two different levels of
complexity of the decision problem to be solved by theorganizations which capture two rather pronounced cases
Based on the seminal work of Simon [16] on the ar-chitecture of complexity (near) decomposability as com-pared to nondecomposability is the key aspect in theunderstanding of complexity (see also Introduction)Against this background the simulations are run for agrowing decomposable and a growing nondecomposableinteraction structure where the principle ldquotyperdquo of com-plexity is kept over the growth stages Hence the growthprocesses simulated may capture some kind of organicgrowth [97ndash99] Figure 1 provides a graphical representationof interaction matrices of the growing decision-problemswhich could capture the following situations (in the sim-ulation experiments the number of decision-makers mirrorsthe growth of the decision-problem for avoiding interferencewith effects of varying size of decision-makersrsquo scope ofcompetency (for further references see [55 100 101]))
(i) ldquodecomposablerdquo (Figure 1(a)) +is type of organi-zation and growth relates to the idea of an organi-zation consisting of self-contained ldquosub-problemsrdquo
Table 2 Parameter settings
Parameter ValuestypesParameters fixed for all experiments (see Section 421)Observation period T 750Interval of learning TL 10Interval of growth stages TG 250Growth stages s 1 2 3
Number of choicesIn growth stage s 1 Ns1 6In growth stage s 2 Ns2 9In growth stage s 3 Ns3 12
Number Ms of distributed decision-makers
In growth stage s 1 M1 2 distributed
decision-makers with sub-problems d1
rarr (d1 d2 d3)
and d2
rarr (d4 d5 d6)
In growth stage s 2 M2 3 ie one additional
distributed decision-maker 3 with sub-problem d3
rarr
(d7 d8 d9)
In growth stage s 3 M3 4 ie one furtheradditional decision-maker 4 with sub-problem
d4
rarr (d10 d11 d12)
Precision of ex-ante evaluation Distributed decision-makers σr 005forallrCentral agent (headquarter) σcent 01
Modes of coordination ac isin Ac ldquodecentralized rdquo ldquosequential rdquo ldquoproposalrdquo1113864 1113865
Aspiration level v 0Learning strength λ 05Parameters subject to variation across experiments (see Section 422)
Complexity of decision problem ldquoDecomposablerdquo ldquonondecomposablerdquofor details of interaction structures see Figure 1
Search strategy
ldquoExploitation onlyrdquo h(dra1
rarr) 1 and h(d
ra2rarr
) 1
ldquoExploitation and explorationrdquo h(dra1
rarr) 1 and
h(dra2
rarr) 2
ldquoExploration onlyrdquo h(dra1
rarr) 2 and h(d
ra2rarr
) 2
Cost of effort (cost coefficient) Baseline scenarios z 0001Sensitivity analysis z isin 0 0003 0005 001 002
12 Complexity
or ldquounitsrdquo [7 8] which have intense intra-unit in-teractions but no cross-unit interactions In the be-ginning the organizationrsquos overall decision-problemis decomposable into 2 distinct sub-problems [17]which for example might be related to differentproducts without any interrelations between themFor the 2 products 2 business units are responsible Inthe course of the growth stages the organizationldquoaddsrdquo further products and business units corre-spondingly without interrelations among the ldquooldrdquoand ldquonewrdquo products and accordingly the units
(ii) ldquonondecomposablerdquo (example given in Figure 1(b))+is case of interactionsmay capture whatmdashaccordingto the prominent classification of +ompson [7]mdashiscalled reciprocal interdependencies In particular thisstructure could represent an organization with func-tional specialization showing the typical high level ofinterrelations between sub-problemsmdashand de-partments accordingly In the course of growth it maybe that the vertical integration is increased (egestablishing an inhouse production of certain in-termediate products or sales logistics)
(2) Search Strategy As described in Section 332 thedecentralized decision-makers employ one of three funda-mental search strategies which are intended to capture ex-ploitation exploration and an ambidextrous strategy [20] asenforced by the boundary systemmdasheach characterized by thenumber of options and the Hamming distances allowed Forexample if an exploration strategy is pursued with M3 4local decision-makers and N3 12 in the final growth stageat maximum 8 digits of the overall decision-problem couldbe flipped ie two-thirds of the configuration dt
rarrcould be
altered in one time step
(3) Cost of Effort While the search strategy shapes themaximum of binary choices that could be flipped the actualalterations are affected by the local decision-makersrsquo pref-erences together with the coordination mode employedAccording to equations (7) and (9) in Section 3 the dis-tributed decision-makersrsquo preferences are affected by thecost of effort and in particular by cost coefficient z
However in order to be clear and concise the simulationexperiments are conducted in two steps First to gain a basicunderstanding of the emergence of coordination in thebaseline scenarios the cost of effort is at a moderate levelz 0001 for all local decision-makers Second a sensitivityanalysis is conducted in whose course the cost of effort isvaried from costless effort (ie z 0) to higher levels of costof effort (ie zgt 0001) in order to analyze the effects of costof effort on the emergence of coordination
43 Metrics Employed for Analysis of Simulations In thebaseline scenarios with 2 interaction structures and 3 searchstrategies under investigation at a given level of cost of effort6 different scenarios of parameters are simulated For thesensitivity analysis 5 additional levels of cost of effort are
simulated which results in 30 further scenarios For each ofin sum the 36 scenarios 2500 simulations are run with 10runs on 250 performance landscapes
+e research question of this paper boils down to thequestion which coordination modes emerge predominantlyfor which contingencies in terms of complexity searchstrategy and cost of effort Hence for answering this questionthe key metric is the relative frequencies of the coordinationmodes in the end of the observation period t 750
Moreover the relative frequencies of coordinationmodes over observation time are depicted +is allows togain an understanding of how their relative shares evolve inthe course of growth and learning
As described in Section 35 the propensities to opt for theone or the other mode of coordination is shaped by theperformance gains achieved under the current mode in thelast TL periods Hence the level of performance according toequations (2) and (4) respectively in Section 31 ie the finalperformance achieved at the end of the observation period forthe different coordination modes is of interest For this the2500 simulations for each scenario were grouped accordingto that mode of coordination which was ldquoactiverdquo (ie hasemerged) in the last period t 750 of the observation time
+ese subgroups were analyzed individually and inparticular the mean of the final performance Vt750 achievedfor each coordination mode selected at t 750 is computed aswell as the respective confidence interval at a 999 level ofconfidence
Moreover another metric informing about the effec-tiveness of the search processes is the relative frequency of theglobal maximum found in t 750 of the respective per-formance landscape which is computed for each subgroup(based on the coordination mode in t 750) separately
In order to gain some deeper understanding of the searchprocesses conducted by the DDMS two further metrics wereobserved and analyzed for each subgroup the ratio of periods inwhich the status quo is altered and the ratio of periods with false-positive alterations ie alterations in favor of a false-positiveoption (ie reducing Vt) to the T 750 periods of observation+ese metrics put some focus on the efficiency of search
5 Results and Discussion
+e results are presented in two steps First for gaining a basicunderstanding of the effects of intraorganizational complexityand search strategy on the emergence of coordination thebaseline scenarios are presented and analyzed (Section 51)While in the baseline scenarios the distributed decision-makers operate at a rather moderate though nonzero level ofcost of effort the sensitivity analysis (Section 52) illustrates theeffect of cost of effort at the local decision-makersrsquo side on thecoordination mode emerging at the systemrsquos level
51 Complexity and Search Strategy Baseline Scenarios
511 Overview For the baseline scenarios Table 3 displayscondensed results obtained from the simulation experimentsaccording to the metrics introduced in Section 43 In ad-dition Table 4 reports on the significances of mean
Complexity 13
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

have shown that the overlaying effects appear to be rathernegligible) However an intuitive ldquostoryrdquo behind this setupprocedure is that the organizations start in fact without any
particular mode of coordination ie the decentralizedmode(for example because they were newly founded) and keepthis until time t 10 in this period they ldquodiscoverrdquo the two
Yes
No
Yes No
Yes No
No
Yes
Decrease of propensities of current mode of coordination to be chosen for the next TL
periods (and increase of propensities of others)
Determination of mode of coordination implemented in the next TL periods according to updated propensities
Central agent evaluates performance enhancement achievedwith the current mode of coordination in the last TL periods
Time step t = 0 growth stage s = 1number of distributed decision-making agents MS=1 = 2
Generation of a performance landscape according to the interaction structureat the first growth stage
Random-driven determination of the initial configuration dt=0 of the overalldecision-problem
Extension of performance landscape according to the interaction structure at the ldquonewrdquo growth stage s increase of number of distributed decision-making
agents by 1 ie MS = MS + 1
t = t + 1
Growth stage s = s + 1
Each distributed decision-maker r discovers alternatives a1 and a2 to the statusquo of the partial problem which is delegated to this decision-maker r
and forms its preferences (local plans)
Overall configuration dt is determined from the local plans according to the current mode of coordination
Central agent determines performance Vt obtained with configuration dt
Increase of propensities of current mode ofcoordination to be chosen for the next TL periods
(and decrease of propensities of others)
t mod TL = 0
t mod TG = 0
Positive feedback
t gt T Stop
Start
Figure 2 Principle processual structure of the simulation model
Complexity 11
alternative modes and choose randomly one option ac isin Ac
out of the three options (ie |Ac| 3) where each mode hasthe same initial probability 1|Ac| +en in every TL 10thperiod probabilities are adjusted according to the perfor-mance enhancements +e parameters for learning corre-spond to a moderate strength of learning [95] On basis ofthe updated probabilities eventually a new coordinationmode is established
422 Contingency Factors Parameters Subject to Variationacross Experiments As argued in the Introduction thisresearch effort takes a contingency perspective and inparticular intends to study the interacting effects of (1)complexity of decision-problem (2) search strategy and (3)cost of effort Accordingly these three contingent factors aresubject to variation across simulation experiments (see alsothe lower part in Table 2)
(1) Complexity of Decision-Problem In line with the idea offactorial design of simulation experiments [96] the exper-iments distinguish between two different levels of
complexity of the decision problem to be solved by theorganizations which capture two rather pronounced cases
Based on the seminal work of Simon [16] on the ar-chitecture of complexity (near) decomposability as com-pared to nondecomposability is the key aspect in theunderstanding of complexity (see also Introduction)Against this background the simulations are run for agrowing decomposable and a growing nondecomposableinteraction structure where the principle ldquotyperdquo of com-plexity is kept over the growth stages Hence the growthprocesses simulated may capture some kind of organicgrowth [97ndash99] Figure 1 provides a graphical representationof interaction matrices of the growing decision-problemswhich could capture the following situations (in the sim-ulation experiments the number of decision-makers mirrorsthe growth of the decision-problem for avoiding interferencewith effects of varying size of decision-makersrsquo scope ofcompetency (for further references see [55 100 101]))
(i) ldquodecomposablerdquo (Figure 1(a)) +is type of organi-zation and growth relates to the idea of an organi-zation consisting of self-contained ldquosub-problemsrdquo
Table 2 Parameter settings
Parameter ValuestypesParameters fixed for all experiments (see Section 421)Observation period T 750Interval of learning TL 10Interval of growth stages TG 250Growth stages s 1 2 3
Number of choicesIn growth stage s 1 Ns1 6In growth stage s 2 Ns2 9In growth stage s 3 Ns3 12
Number Ms of distributed decision-makers
In growth stage s 1 M1 2 distributed
decision-makers with sub-problems d1
rarr (d1 d2 d3)
and d2
rarr (d4 d5 d6)
In growth stage s 2 M2 3 ie one additional
distributed decision-maker 3 with sub-problem d3
rarr
(d7 d8 d9)
In growth stage s 3 M3 4 ie one furtheradditional decision-maker 4 with sub-problem
d4
rarr (d10 d11 d12)
Precision of ex-ante evaluation Distributed decision-makers σr 005forallrCentral agent (headquarter) σcent 01
Modes of coordination ac isin Ac ldquodecentralized rdquo ldquosequential rdquo ldquoproposalrdquo1113864 1113865
Aspiration level v 0Learning strength λ 05Parameters subject to variation across experiments (see Section 422)
Complexity of decision problem ldquoDecomposablerdquo ldquonondecomposablerdquofor details of interaction structures see Figure 1
Search strategy
ldquoExploitation onlyrdquo h(dra1
rarr) 1 and h(d
ra2rarr
) 1
ldquoExploitation and explorationrdquo h(dra1
rarr) 1 and
h(dra2
rarr) 2
ldquoExploration onlyrdquo h(dra1
rarr) 2 and h(d
ra2rarr
) 2
Cost of effort (cost coefficient) Baseline scenarios z 0001Sensitivity analysis z isin 0 0003 0005 001 002
12 Complexity
or ldquounitsrdquo [7 8] which have intense intra-unit in-teractions but no cross-unit interactions In the be-ginning the organizationrsquos overall decision-problemis decomposable into 2 distinct sub-problems [17]which for example might be related to differentproducts without any interrelations between themFor the 2 products 2 business units are responsible Inthe course of the growth stages the organizationldquoaddsrdquo further products and business units corre-spondingly without interrelations among the ldquooldrdquoand ldquonewrdquo products and accordingly the units
(ii) ldquonondecomposablerdquo (example given in Figure 1(b))+is case of interactionsmay capture whatmdashaccordingto the prominent classification of +ompson [7]mdashiscalled reciprocal interdependencies In particular thisstructure could represent an organization with func-tional specialization showing the typical high level ofinterrelations between sub-problemsmdashand de-partments accordingly In the course of growth it maybe that the vertical integration is increased (egestablishing an inhouse production of certain in-termediate products or sales logistics)
(2) Search Strategy As described in Section 332 thedecentralized decision-makers employ one of three funda-mental search strategies which are intended to capture ex-ploitation exploration and an ambidextrous strategy [20] asenforced by the boundary systemmdasheach characterized by thenumber of options and the Hamming distances allowed Forexample if an exploration strategy is pursued with M3 4local decision-makers and N3 12 in the final growth stageat maximum 8 digits of the overall decision-problem couldbe flipped ie two-thirds of the configuration dt
rarrcould be
altered in one time step
(3) Cost of Effort While the search strategy shapes themaximum of binary choices that could be flipped the actualalterations are affected by the local decision-makersrsquo pref-erences together with the coordination mode employedAccording to equations (7) and (9) in Section 3 the dis-tributed decision-makersrsquo preferences are affected by thecost of effort and in particular by cost coefficient z
However in order to be clear and concise the simulationexperiments are conducted in two steps First to gain a basicunderstanding of the emergence of coordination in thebaseline scenarios the cost of effort is at a moderate levelz 0001 for all local decision-makers Second a sensitivityanalysis is conducted in whose course the cost of effort isvaried from costless effort (ie z 0) to higher levels of costof effort (ie zgt 0001) in order to analyze the effects of costof effort on the emergence of coordination
43 Metrics Employed for Analysis of Simulations In thebaseline scenarios with 2 interaction structures and 3 searchstrategies under investigation at a given level of cost of effort6 different scenarios of parameters are simulated For thesensitivity analysis 5 additional levels of cost of effort are
simulated which results in 30 further scenarios For each ofin sum the 36 scenarios 2500 simulations are run with 10runs on 250 performance landscapes
+e research question of this paper boils down to thequestion which coordination modes emerge predominantlyfor which contingencies in terms of complexity searchstrategy and cost of effort Hence for answering this questionthe key metric is the relative frequencies of the coordinationmodes in the end of the observation period t 750
Moreover the relative frequencies of coordinationmodes over observation time are depicted +is allows togain an understanding of how their relative shares evolve inthe course of growth and learning
As described in Section 35 the propensities to opt for theone or the other mode of coordination is shaped by theperformance gains achieved under the current mode in thelast TL periods Hence the level of performance according toequations (2) and (4) respectively in Section 31 ie the finalperformance achieved at the end of the observation period forthe different coordination modes is of interest For this the2500 simulations for each scenario were grouped accordingto that mode of coordination which was ldquoactiverdquo (ie hasemerged) in the last period t 750 of the observation time
+ese subgroups were analyzed individually and inparticular the mean of the final performance Vt750 achievedfor each coordination mode selected at t 750 is computed aswell as the respective confidence interval at a 999 level ofconfidence
Moreover another metric informing about the effec-tiveness of the search processes is the relative frequency of theglobal maximum found in t 750 of the respective per-formance landscape which is computed for each subgroup(based on the coordination mode in t 750) separately
In order to gain some deeper understanding of the searchprocesses conducted by the DDMS two further metrics wereobserved and analyzed for each subgroup the ratio of periods inwhich the status quo is altered and the ratio of periods with false-positive alterations ie alterations in favor of a false-positiveoption (ie reducing Vt) to the T 750 periods of observation+ese metrics put some focus on the efficiency of search
5 Results and Discussion
+e results are presented in two steps First for gaining a basicunderstanding of the effects of intraorganizational complexityand search strategy on the emergence of coordination thebaseline scenarios are presented and analyzed (Section 51)While in the baseline scenarios the distributed decision-makers operate at a rather moderate though nonzero level ofcost of effort the sensitivity analysis (Section 52) illustrates theeffect of cost of effort at the local decision-makersrsquo side on thecoordination mode emerging at the systemrsquos level
51 Complexity and Search Strategy Baseline Scenarios
511 Overview For the baseline scenarios Table 3 displayscondensed results obtained from the simulation experimentsaccording to the metrics introduced in Section 43 In ad-dition Table 4 reports on the significances of mean
Complexity 13
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

alternative modes and choose randomly one option ac isin Ac
out of the three options (ie |Ac| 3) where each mode hasthe same initial probability 1|Ac| +en in every TL 10thperiod probabilities are adjusted according to the perfor-mance enhancements +e parameters for learning corre-spond to a moderate strength of learning [95] On basis ofthe updated probabilities eventually a new coordinationmode is established
422 Contingency Factors Parameters Subject to Variationacross Experiments As argued in the Introduction thisresearch effort takes a contingency perspective and inparticular intends to study the interacting effects of (1)complexity of decision-problem (2) search strategy and (3)cost of effort Accordingly these three contingent factors aresubject to variation across simulation experiments (see alsothe lower part in Table 2)
(1) Complexity of Decision-Problem In line with the idea offactorial design of simulation experiments [96] the exper-iments distinguish between two different levels of
complexity of the decision problem to be solved by theorganizations which capture two rather pronounced cases
Based on the seminal work of Simon [16] on the ar-chitecture of complexity (near) decomposability as com-pared to nondecomposability is the key aspect in theunderstanding of complexity (see also Introduction)Against this background the simulations are run for agrowing decomposable and a growing nondecomposableinteraction structure where the principle ldquotyperdquo of com-plexity is kept over the growth stages Hence the growthprocesses simulated may capture some kind of organicgrowth [97ndash99] Figure 1 provides a graphical representationof interaction matrices of the growing decision-problemswhich could capture the following situations (in the sim-ulation experiments the number of decision-makers mirrorsthe growth of the decision-problem for avoiding interferencewith effects of varying size of decision-makersrsquo scope ofcompetency (for further references see [55 100 101]))
(i) ldquodecomposablerdquo (Figure 1(a)) +is type of organi-zation and growth relates to the idea of an organi-zation consisting of self-contained ldquosub-problemsrdquo
Table 2 Parameter settings
Parameter ValuestypesParameters fixed for all experiments (see Section 421)Observation period T 750Interval of learning TL 10Interval of growth stages TG 250Growth stages s 1 2 3
Number of choicesIn growth stage s 1 Ns1 6In growth stage s 2 Ns2 9In growth stage s 3 Ns3 12
Number Ms of distributed decision-makers
In growth stage s 1 M1 2 distributed
decision-makers with sub-problems d1
rarr (d1 d2 d3)
and d2
rarr (d4 d5 d6)
In growth stage s 2 M2 3 ie one additional
distributed decision-maker 3 with sub-problem d3
rarr
(d7 d8 d9)
In growth stage s 3 M3 4 ie one furtheradditional decision-maker 4 with sub-problem
d4
rarr (d10 d11 d12)
Precision of ex-ante evaluation Distributed decision-makers σr 005forallrCentral agent (headquarter) σcent 01
Modes of coordination ac isin Ac ldquodecentralized rdquo ldquosequential rdquo ldquoproposalrdquo1113864 1113865
Aspiration level v 0Learning strength λ 05Parameters subject to variation across experiments (see Section 422)
Complexity of decision problem ldquoDecomposablerdquo ldquonondecomposablerdquofor details of interaction structures see Figure 1
Search strategy
ldquoExploitation onlyrdquo h(dra1
rarr) 1 and h(d
ra2rarr
) 1
ldquoExploitation and explorationrdquo h(dra1
rarr) 1 and
h(dra2
rarr) 2
ldquoExploration onlyrdquo h(dra1
rarr) 2 and h(d
ra2rarr
) 2
Cost of effort (cost coefficient) Baseline scenarios z 0001Sensitivity analysis z isin 0 0003 0005 001 002
12 Complexity
or ldquounitsrdquo [7 8] which have intense intra-unit in-teractions but no cross-unit interactions In the be-ginning the organizationrsquos overall decision-problemis decomposable into 2 distinct sub-problems [17]which for example might be related to differentproducts without any interrelations between themFor the 2 products 2 business units are responsible Inthe course of the growth stages the organizationldquoaddsrdquo further products and business units corre-spondingly without interrelations among the ldquooldrdquoand ldquonewrdquo products and accordingly the units
(ii) ldquonondecomposablerdquo (example given in Figure 1(b))+is case of interactionsmay capture whatmdashaccordingto the prominent classification of +ompson [7]mdashiscalled reciprocal interdependencies In particular thisstructure could represent an organization with func-tional specialization showing the typical high level ofinterrelations between sub-problemsmdashand de-partments accordingly In the course of growth it maybe that the vertical integration is increased (egestablishing an inhouse production of certain in-termediate products or sales logistics)
(2) Search Strategy As described in Section 332 thedecentralized decision-makers employ one of three funda-mental search strategies which are intended to capture ex-ploitation exploration and an ambidextrous strategy [20] asenforced by the boundary systemmdasheach characterized by thenumber of options and the Hamming distances allowed Forexample if an exploration strategy is pursued with M3 4local decision-makers and N3 12 in the final growth stageat maximum 8 digits of the overall decision-problem couldbe flipped ie two-thirds of the configuration dt
rarrcould be
altered in one time step
(3) Cost of Effort While the search strategy shapes themaximum of binary choices that could be flipped the actualalterations are affected by the local decision-makersrsquo pref-erences together with the coordination mode employedAccording to equations (7) and (9) in Section 3 the dis-tributed decision-makersrsquo preferences are affected by thecost of effort and in particular by cost coefficient z
However in order to be clear and concise the simulationexperiments are conducted in two steps First to gain a basicunderstanding of the emergence of coordination in thebaseline scenarios the cost of effort is at a moderate levelz 0001 for all local decision-makers Second a sensitivityanalysis is conducted in whose course the cost of effort isvaried from costless effort (ie z 0) to higher levels of costof effort (ie zgt 0001) in order to analyze the effects of costof effort on the emergence of coordination
43 Metrics Employed for Analysis of Simulations In thebaseline scenarios with 2 interaction structures and 3 searchstrategies under investigation at a given level of cost of effort6 different scenarios of parameters are simulated For thesensitivity analysis 5 additional levels of cost of effort are
simulated which results in 30 further scenarios For each ofin sum the 36 scenarios 2500 simulations are run with 10runs on 250 performance landscapes
+e research question of this paper boils down to thequestion which coordination modes emerge predominantlyfor which contingencies in terms of complexity searchstrategy and cost of effort Hence for answering this questionthe key metric is the relative frequencies of the coordinationmodes in the end of the observation period t 750
Moreover the relative frequencies of coordinationmodes over observation time are depicted +is allows togain an understanding of how their relative shares evolve inthe course of growth and learning
As described in Section 35 the propensities to opt for theone or the other mode of coordination is shaped by theperformance gains achieved under the current mode in thelast TL periods Hence the level of performance according toequations (2) and (4) respectively in Section 31 ie the finalperformance achieved at the end of the observation period forthe different coordination modes is of interest For this the2500 simulations for each scenario were grouped accordingto that mode of coordination which was ldquoactiverdquo (ie hasemerged) in the last period t 750 of the observation time
+ese subgroups were analyzed individually and inparticular the mean of the final performance Vt750 achievedfor each coordination mode selected at t 750 is computed aswell as the respective confidence interval at a 999 level ofconfidence
Moreover another metric informing about the effec-tiveness of the search processes is the relative frequency of theglobal maximum found in t 750 of the respective per-formance landscape which is computed for each subgroup(based on the coordination mode in t 750) separately
In order to gain some deeper understanding of the searchprocesses conducted by the DDMS two further metrics wereobserved and analyzed for each subgroup the ratio of periods inwhich the status quo is altered and the ratio of periods with false-positive alterations ie alterations in favor of a false-positiveoption (ie reducing Vt) to the T 750 periods of observation+ese metrics put some focus on the efficiency of search
5 Results and Discussion
+e results are presented in two steps First for gaining a basicunderstanding of the effects of intraorganizational complexityand search strategy on the emergence of coordination thebaseline scenarios are presented and analyzed (Section 51)While in the baseline scenarios the distributed decision-makers operate at a rather moderate though nonzero level ofcost of effort the sensitivity analysis (Section 52) illustrates theeffect of cost of effort at the local decision-makersrsquo side on thecoordination mode emerging at the systemrsquos level
51 Complexity and Search Strategy Baseline Scenarios
511 Overview For the baseline scenarios Table 3 displayscondensed results obtained from the simulation experimentsaccording to the metrics introduced in Section 43 In ad-dition Table 4 reports on the significances of mean
Complexity 13
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

or ldquounitsrdquo [7 8] which have intense intra-unit in-teractions but no cross-unit interactions In the be-ginning the organizationrsquos overall decision-problemis decomposable into 2 distinct sub-problems [17]which for example might be related to differentproducts without any interrelations between themFor the 2 products 2 business units are responsible Inthe course of the growth stages the organizationldquoaddsrdquo further products and business units corre-spondingly without interrelations among the ldquooldrdquoand ldquonewrdquo products and accordingly the units
(ii) ldquonondecomposablerdquo (example given in Figure 1(b))+is case of interactionsmay capture whatmdashaccordingto the prominent classification of +ompson [7]mdashiscalled reciprocal interdependencies In particular thisstructure could represent an organization with func-tional specialization showing the typical high level ofinterrelations between sub-problemsmdashand de-partments accordingly In the course of growth it maybe that the vertical integration is increased (egestablishing an inhouse production of certain in-termediate products or sales logistics)
(2) Search Strategy As described in Section 332 thedecentralized decision-makers employ one of three funda-mental search strategies which are intended to capture ex-ploitation exploration and an ambidextrous strategy [20] asenforced by the boundary systemmdasheach characterized by thenumber of options and the Hamming distances allowed Forexample if an exploration strategy is pursued with M3 4local decision-makers and N3 12 in the final growth stageat maximum 8 digits of the overall decision-problem couldbe flipped ie two-thirds of the configuration dt
rarrcould be
altered in one time step
(3) Cost of Effort While the search strategy shapes themaximum of binary choices that could be flipped the actualalterations are affected by the local decision-makersrsquo pref-erences together with the coordination mode employedAccording to equations (7) and (9) in Section 3 the dis-tributed decision-makersrsquo preferences are affected by thecost of effort and in particular by cost coefficient z
However in order to be clear and concise the simulationexperiments are conducted in two steps First to gain a basicunderstanding of the emergence of coordination in thebaseline scenarios the cost of effort is at a moderate levelz 0001 for all local decision-makers Second a sensitivityanalysis is conducted in whose course the cost of effort isvaried from costless effort (ie z 0) to higher levels of costof effort (ie zgt 0001) in order to analyze the effects of costof effort on the emergence of coordination
43 Metrics Employed for Analysis of Simulations In thebaseline scenarios with 2 interaction structures and 3 searchstrategies under investigation at a given level of cost of effort6 different scenarios of parameters are simulated For thesensitivity analysis 5 additional levels of cost of effort are
simulated which results in 30 further scenarios For each ofin sum the 36 scenarios 2500 simulations are run with 10runs on 250 performance landscapes
+e research question of this paper boils down to thequestion which coordination modes emerge predominantlyfor which contingencies in terms of complexity searchstrategy and cost of effort Hence for answering this questionthe key metric is the relative frequencies of the coordinationmodes in the end of the observation period t 750
Moreover the relative frequencies of coordinationmodes over observation time are depicted +is allows togain an understanding of how their relative shares evolve inthe course of growth and learning
As described in Section 35 the propensities to opt for theone or the other mode of coordination is shaped by theperformance gains achieved under the current mode in thelast TL periods Hence the level of performance according toequations (2) and (4) respectively in Section 31 ie the finalperformance achieved at the end of the observation period forthe different coordination modes is of interest For this the2500 simulations for each scenario were grouped accordingto that mode of coordination which was ldquoactiverdquo (ie hasemerged) in the last period t 750 of the observation time
+ese subgroups were analyzed individually and inparticular the mean of the final performance Vt750 achievedfor each coordination mode selected at t 750 is computed aswell as the respective confidence interval at a 999 level ofconfidence
Moreover another metric informing about the effec-tiveness of the search processes is the relative frequency of theglobal maximum found in t 750 of the respective per-formance landscape which is computed for each subgroup(based on the coordination mode in t 750) separately
In order to gain some deeper understanding of the searchprocesses conducted by the DDMS two further metrics wereobserved and analyzed for each subgroup the ratio of periods inwhich the status quo is altered and the ratio of periods with false-positive alterations ie alterations in favor of a false-positiveoption (ie reducing Vt) to the T 750 periods of observation+ese metrics put some focus on the efficiency of search
5 Results and Discussion
+e results are presented in two steps First for gaining a basicunderstanding of the effects of intraorganizational complexityand search strategy on the emergence of coordination thebaseline scenarios are presented and analyzed (Section 51)While in the baseline scenarios the distributed decision-makers operate at a rather moderate though nonzero level ofcost of effort the sensitivity analysis (Section 52) illustrates theeffect of cost of effort at the local decision-makersrsquo side on thecoordination mode emerging at the systemrsquos level
51 Complexity and Search Strategy Baseline Scenarios
511 Overview For the baseline scenarios Table 3 displayscondensed results obtained from the simulation experimentsaccording to the metrics introduced in Section 43 In ad-dition Table 4 reports on the significances of mean
Complexity 13
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
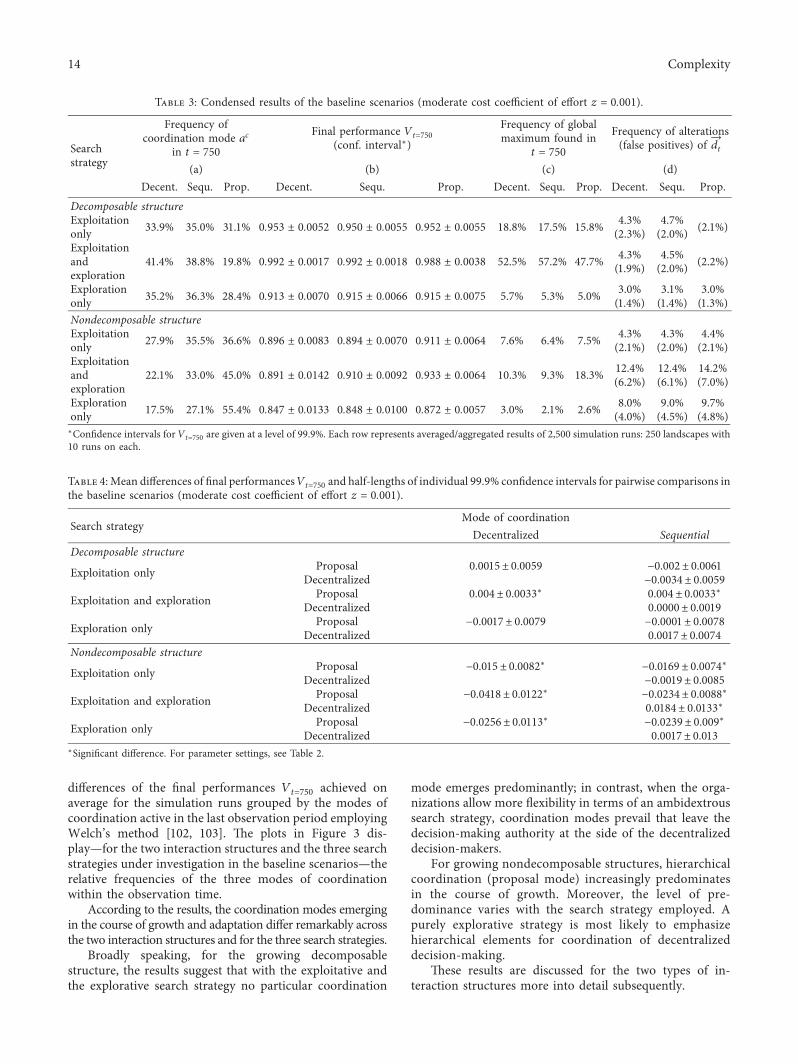
differences of the final performances Vt750 achieved onaverage for the simulation runs grouped by the modes ofcoordination active in the last observation period employingWelchrsquos method [102 103] +e plots in Figure 3 dis-playmdashfor the two interaction structures and the three searchstrategies under investigation in the baseline scenariosmdashtherelative frequencies of the three modes of coordinationwithin the observation time
According to the results the coordination modes emergingin the course of growth and adaptation differ remarkably acrossthe two interaction structures and for the three search strategies
Broadly speaking for the growing decomposablestructure the results suggest that with the exploitative andthe explorative search strategy no particular coordination
mode emerges predominantly in contrast when the orga-nizations allow more flexibility in terms of an ambidextroussearch strategy coordination modes prevail that leave thedecision-making authority at the side of the decentralizeddecision-makers
For growing nondecomposable structures hierarchicalcoordination (proposal mode) increasingly predominatesin the course of growth Moreover the level of pre-dominance varies with the search strategy employed Apurely explorative strategy is most likely to emphasizehierarchical elements for coordination of decentralizeddecision-making
+ese results are discussed for the two types of in-teraction structures more into detail subsequently
Table 3 Condensed results of the baseline scenarios (moderate cost coefficient of effort z 0001)
Searchstrategy
Frequency ofcoordination mode ac
in t 750
Final performance Vt750(conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
Decomposable structureExploitationonly 339 350 311 0953 plusmn 00052 0950 plusmn 00055 0952 plusmn 00055 188 175 158 43
(23)47(20) (21)
Exploitationandexploration
414 388 198 0992 plusmn 00017 0992 plusmn 00018 0988 plusmn 00038 525 572 477 43(19)
45(20) (22)
Explorationonly 352 363 284 0913 plusmn 00070 0915 plusmn 00066 0915 plusmn 00075 57 53 50 30
(14)31(14)
30(13)
Nondecomposable structureExploitationonly 279 355 366 0896 plusmn 00083 0894 plusmn 00070 0911 plusmn 00064 76 64 75 43
(21)43(20)
44(21)
Exploitationandexploration
221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
Explorationonly 175 271 554 0847 plusmn 00133 0848 plusmn 00100 0872 plusmn 00057 30 21 26 80
(40)90(45)
97(48)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Table 4Mean differences of final performancesVt750 and half-lengths of individual 999 confidence intervals for pairwise comparisons inthe baseline scenarios (moderate cost coefficient of effort z 0001)
Search strategyMode of coordinationDecentralized Sequential
Decomposable structure
Exploitation only Proposal 00015plusmn 00059 minus 0002plusmn 00061Decentralized minus 00034plusmn 00059
Exploitation and exploration Proposal 0004plusmn 00033lowast 0004plusmn 00033lowastDecentralized 00000plusmn 00019
Exploration only Proposal minus 00017plusmn 00079 minus 00001plusmn 00078Decentralized 00017plusmn 00074
Nondecomposable structure
Exploitation only Proposal minus 0015plusmn 00082lowast minus 00169plusmn 00074lowastDecentralized minus 00019plusmn 00085
Exploitation and exploration Proposal minus 00418plusmn 00122lowast minus 00234plusmn 00088lowastDecentralized 00184plusmn 00133lowast
Exploration only Proposal minus 00256plusmn 00113lowast minus 00239plusmn 0009lowastDecentralized 00017plusmn 0013
lowastSignificant difference For parameter settings see Table 2
14 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3 2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(a)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(b)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3 1
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(c)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(d)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(e)
Relat
ive f
requ
ency
()
0
10
20
30
40
50
60
70
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized2 sequential3 proposal
(f)
Figure 3 Relative frequencies of coordination modes in the course of growth in the baseline scenarios (ie moderate cost coefficientof effort z 0001) Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parametersettings see Table 2 (a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only (d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) non-decomposable-exploration only
Complexity 15
512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

512 Decomposable Interaction Structure For a closeranalysis a starting point is the coordination need and in thedecomposable structure there is in fact no need for co-ordination across the sub-problems which could result fromthe nature of the ldquogrowingrdquo task +e sub-problems do notshow any interactions among each other (see Figure 1(a))With this intuition suggests thatmdashfor a given search strategyand as far as no cost of coordination are taken into accountlike in this studymdashthe three mechanisms of coordinationunder investigation should not show remarkable differencesin terms of performance Vt provided and in consequencethe learning-based frequencies of occurrence
For the ldquoexploitation onlyrdquo and the ldquoexploration onlyrdquosearch strategies this conjecture is broadly supported by theresults frequencies of occurrences throughout the obser-vation period (Figures 3(a) and 3(c)) and final performances(columns (a) and (b) in Table 3) are at a similar level for thethree modes of coordination However for the ambidex-trous search strategy results suggest that the proposal mode(ie employing hierarchy) in the course of growth is in-creasingly predominated by the other modes and the finalperformances achieved with the decentralized and the se-quential mode go beyond the level obtained when theproposal mode is ldquoactiverdquo at t 750 (employing Welchrsquosmethod [102 103] the performance differences against theproposal mode are significant at a confidence level of 999as can be seen in Table 4) Moreover it is worth mentioningthat in the ambidextrous strategy the final performancesexceed the levels obtained with the ldquoexploitation onlyrdquostrategy by around 35 and with the ldquoexploration onlyrdquostrategy by around 8 points of percentage
Hence from these observations two interrelated ques-tions arise (1) What may cause the performance excess ofthe ambidextrous strategy compared to the other strategiesand (2) what drives the imbalance in the coordinationmodesin the ambidextrous strategy
For suggesting answers to these questions it appearshelpful to consider the sources of coordination need whichare broadly speaking
(1) interactions across sub-problems and distributeddecision-makers accordingly which result from de-composition into sub-problems (eg [16 93])
(2) distributed decision-makers pursuing not theDDMSrsquos overall but their parochial objectivesmdashasextensively elaborated in contract theory with itsapplications in management control (eg [83 104])
(3) decision-makers having different and imperfect in-formation of the problem to be solvedmdashmay it be inthe tradition of information economics as elaboratedin the seminal paper of Sah and Stiglitz [105] incontract theory (eg [83]) or following the tradition ofbounded rationality according to Simon [19]
Since in the decomposable structure there are no in-teractions across sub-problems and distributed decision-makers no inter-sub-problem coordination need (1) existsand for this reason even the merely parochial objectives (2)of the local decision-makers should not affect the overall
performance achieved which here resultsmdashacross all growthstagesmdashas a sum of the decentralized decision-makersrsquoperformances without complementarities or substitutes tobe taken into account However apparently aspect (3) is ofrelevance in the model none of the decision-maker-smdashneither the distributed nor the central type (see Section32)mdashdisposes of perfect information and in the proposalmode the rather imprecise information of the central agententers in decision-making without that its broad perspectivemakes a relevant contribution since there is no need forcoordination resulting from aspects (1) or (2)
Apparently this is particularly crucial in the ambi-dextrous strategy +is strategy gives the distributed de-cision-makers the highest flexibility in terms of shaping thenovelty of solutions to their partial problems and com-bined with their rather precise information allows them toadjust rather fast to the local maxima of their particularsub-problems +ese beneficial effects of flexibility ofsearch captured in the ambidextrous strategy show up inthe frequency of the global maximum found (column (c) inTable 3) which is at a considerably higher level than in theother strategies However involving the central agentmdashwith its imprecise information whose broadness does notcontribute in case of decomposable structuresmdashreduces theeffectiveness of search and hence the proposal mode is lessoften selected
More broadly speaking the results so far suggest thatthe search strategy subtly interferes with the coordinationmode emerging even if coordination need is at a low level
513 Nondecomposable Interaction Structure In contrast tothe decomposable structure for noncomposable decision-problems the emergence of coordination modes differsremarkably across search strategies For a start it is worthemphasizing that nowmdashdue to cross-problem inter-actionsmdashsuperior configurations or even the global opti-mum in the performance landscape cannot be found by justlocating superior (or optimal) solutions to the sub-problemsMoreover stepwise search processes particularly whenconducted in a decentralized manner as in our model arelikely to end up in local maxima causing inertia of the search(with further references [21 37 73])
Each of the aforementioned three sources of co-ordination need is relevant now (1) cross-departmentalinteractions with the complexity increasing in the course ofgrowth (2) distributed decision-makers focusing on paro-chial performance which in the nondecomposable structureis not necessarily in line with overall performance and (3)decision-makers operating with imperfect information invarious senses
As can be seen in Table 3 in the ldquoexploitation onlyrdquostrategy the three modes of coordination emerge with rathersimilar relative frequencies In contrast in the ambidextrousstrategy the proposal modersquos share reaches a level of 45and in the ldquoexploitation onlyrdquo strategy it is established inmore than 55 of the runs in the end of the observationperiod Figures 3(d)ndash3(f ) illustrate these differences in theemergence over time
16 Complexity
As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

As reported in Table 3 the final performances achievedwith the different settings of search strategy and co-ordination mode differ remarkably With ldquoexploitationonlyrdquo in all coordination modes a medium level of around90 of the maximal performance of 1 is achievedmdashthoughthe proposal mode significantly provides the best results(according to theWelchrsquos test (see Table 4) the performanceexcess is significant at a confidence level of 999) Incontrast with ldquopurerdquo exploration final performance atmaximum is around 87 and in the decentralized and thesequential mode around 25 points of percentage less In theambidextrous strategy the final performance achieved in theproposal mode is significantly higher than that obtained withthe decentralized (+418 points of percentage) and the se-quential mode (+234 points of percentage) and with 933it is even the highest obtained for this structure across allsearch strategies +e frequency of the global maximumfound directs in a similar direction
Apparently in growing task environments with highcomplexity throughout growth the central agent is increasinglyinvolved in coordination in terms of using upward commu-nication and employing aggregate organization-wide in-formation for decision-making +is corresponds to results ofempirical studies examining the effect of intraorganizationalinterdependencies as a contingent factor on managementcontrols as reported in Section 2 indicating that higher levels ofinterdependencies are associated by more vertical informationflows and use of aggregated information [24 49 50] In a similarvein though not explicitly controlling for internal complexityDavila [48] argues that the use of formal controls increasing inorganizational size may be driven by increasing complexitywhich is supported by a positive relation between size andemphasis on action controls (corresponding to the boundarysystem) in his empirical study
While the aforementioned effect shows up for all searchstrategies the different search strategies appear to be differ-ently sensitive to the coordination mode emerging Asmentioned above the purely explorative strategy performsworst in this interaction structure with hierarchical co-ordination (ldquoproposal moderdquo) leading to the relatively bestresults and emerging by far most often +is indicates on thetension incorporated in the boundary system in general and asalso captured in the model As argued by Simons et al[53 106] the boundary system could facilitate renewalenforcing decision-makers to search for largely new way-smdashwhich our model seeks to capture in the ldquoexploration onlyrdquostrategy at the same time boundaries as established in theldquoproposal moderdquo help to align parochial choices to the overallobjectives of the organization However rigid limits on thescope of search as established in the ldquoexploitation onlyrdquostrategy reduce the diversity of search and in this sense morerigid coordination (as with the proposal mode) may bebeneficial (as is supported by the empirical study of Bedford[26]) though less than that in the ldquoexploration onlyrdquo strategy+is is broadly reflected in the simulation results since in theldquoexploitation onlyrdquo strategy the final performances obtained inthe three modes of coordination reach a similar level and thepredominance of the proposal mode is not as clear as for theother search strategies
+e ambidextrous search strategy appears to be particu-larly sensitive to the coordination mode in respect of the(spread of) performance levels obtained Asmentioned beforethis strategy grants the highest flexibility to the distributeddecision-makers in terms of allowing for varying levels ofnovelty of their solutions apparently the combination offlexibility on the side of decentralized decision-makers andcentralized final choices provides the best results whencomplexity is (increasingly) high +is relates to the tensioncaptured in ambidextrous strategies which in face of empiricalresults lets Bedford [26] argue that in organizations pursuingthis search strategy setting boundaries may be an alternative orsubstitute to other components of the MCS rather than beingnecessarily balanced with the other components
52 Sensitivity to Cost of Effort
521 Overview So far the emergence of the coordinationmode was studied for organizations with the distributeddecision-makers operating at a moderate level of cost ofeffort (ie cost coefficient z 0001) In the next step of thissimulation study the effect of cost of effort is analyzed Inparticular for the two interaction structures and the threesearch strategies under investigation simulations with dif-ferent levels of cost of effort are run Apart from simulationsfor costless effort (ie z 0) also experiments for costcoefficients z isin 0003 0005 001 002 were conductedFigures 4 and 5 present results obtained for a medium costlevel z 0005 and a high cost level of z 002 respectively
In order to be clear and concise only the key findings andselected aspects of the sensitivity analysis are addressed ex-plicitly For this reason the case of zero cost of effort is notdiscussed more in detail since the experiments suggest thatresults obtained in the baseline scenarios (ie moderate costlevel) do not change substantially when the decentralizeddecision-makers operate with costless effort However withincreasing cost of effort the emergence of coordination modes(given by their relative frequencies) notably changes comparedto the baseline scenarios +e most interesting results show upfor the nondecomposable structure which is why this will bediscussed more extensivelymdashparticularly in conjunction withthe ldquoexploitation and explorationrdquo strategy
With respect to the decomposable structure comparingresults obtained for the moderate cost level (Figure 3) againstthose for medium and high cost (Figures 4 and 5) reveals themost obvious difference thatmdashin each search strat-egymdashhierarchical coordination (proposalmode) is the less oftenimplemented the higher the cost level +is effect is morepronounced for the ambidextrous and the explorative strategiesAnalyzing the results more in detail reveals an interesting di-chotomy between the relative frequency of emergence and thefinal performance Vt750 of the coordination modes this effectis even stronger in the nondecomposable structures andtherefore will be discussed in the context below
In contrast in the nondecomposable structure theemerging coordination mode appears to be remarkablysensitive to an increase in the cost of effort In particular forthe ambidextrous search strategy and the purely explorative
Complexity 17
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
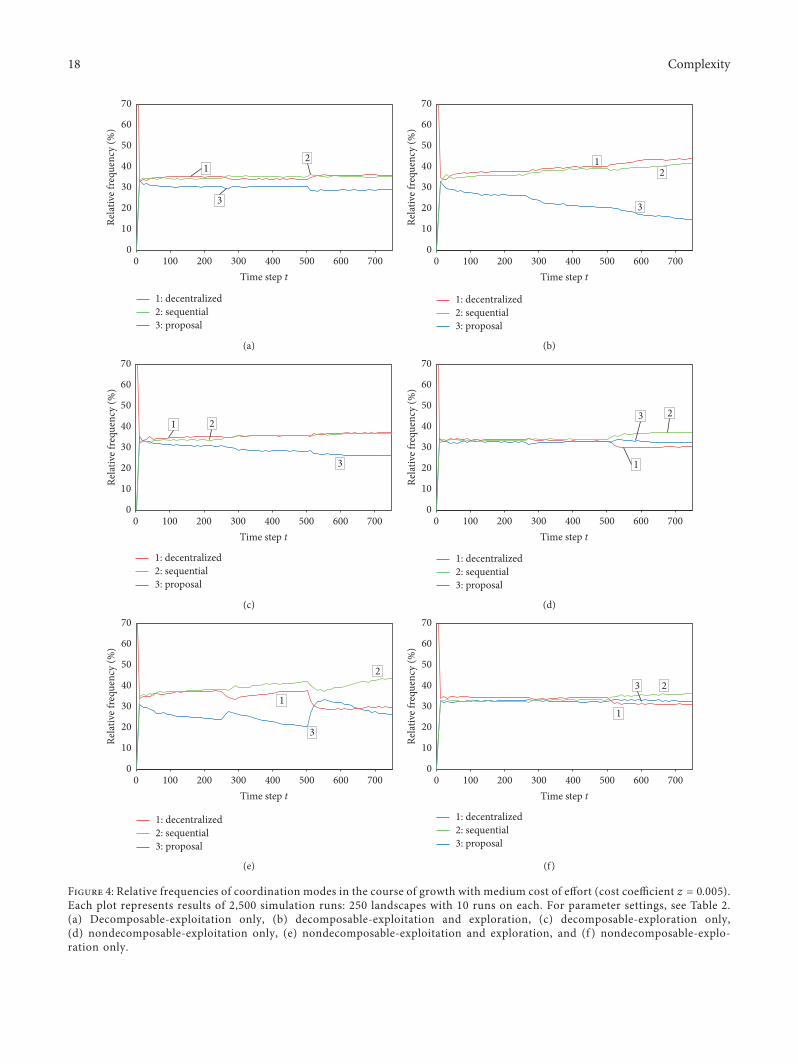
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
12
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1 2
100 200 300 400 500 600 7000Time step t
(c)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3 2
100 200 300 400 500 600 7000Time step t
(f )
Figure 4 Relative frequencies of coordination modes in the course of growth with medium cost of effort (cost coefficient z 0005)Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
18 Complexity
0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

0
10
20
30
40
50
60
70Re
lativ
e fre
quen
cy (
)
1
3
2
100 200 300 400 500 600 7000Time step t
1 decentralized 2 sequential3 proposal
(a)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(b)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
3
1
2
100 200 300 400 500 600 7000Time step t
(c)
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1 decentralized 2 sequential3 proposal
13
2
100 200 300 400 500 600 7000Time step t
(d)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(e)
1 decentralized 2 sequential3 proposal
0
10
20
30
40
50
60
70
Relat
ive f
requ
ency
()
1
3
2
100 200 300 400 500 600 7000Time step t
(f )
Figure 5 Relative frequencies of coordination modes in the course of growth with high cost of effort (cost coefficient z 002) Eachplot represents results of 2500 simulation runs 250 landscapes with 10 runs on each For parameter settings see Table 2(a) Decomposable-exploitation only (b) decomposable-exploitation and exploration (c) decomposable-exploration only(d) nondecomposable-exploitation only (e) nondecomposable-exploitation and exploration and (f ) nondecomposable-explo-ration only
Complexity 19
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
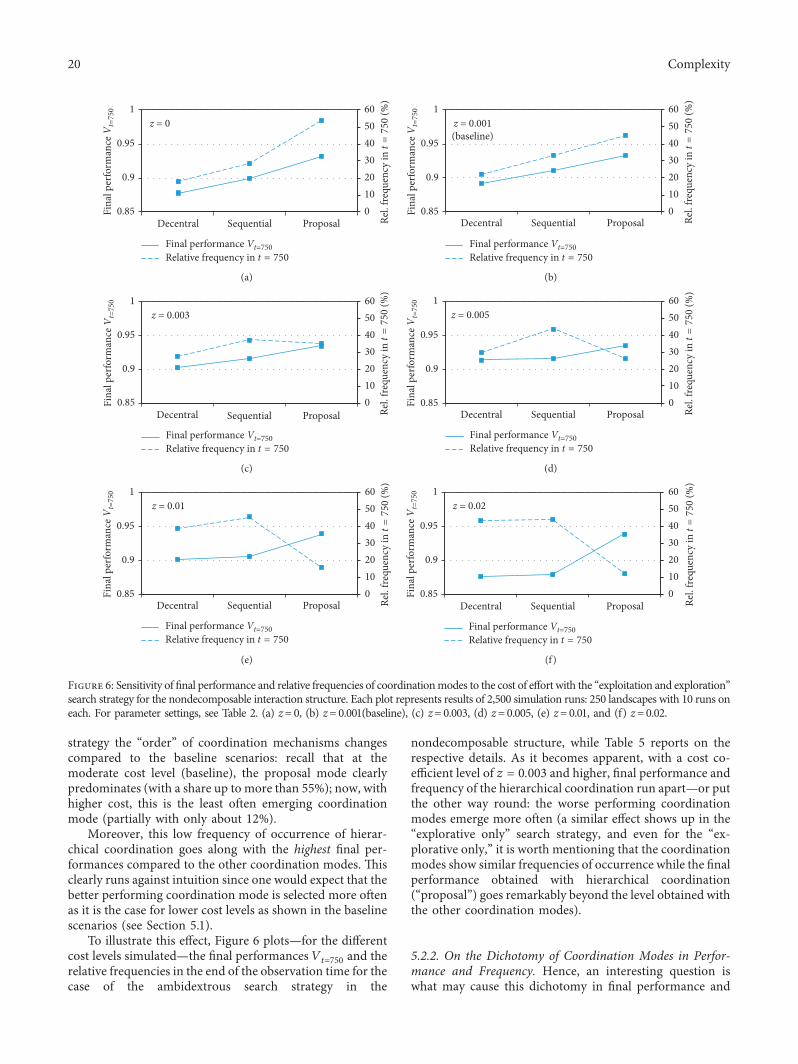
strategy the ldquoorderrdquo of coordination mechanisms changescompared to the baseline scenarios recall that at themoderate cost level (baseline) the proposal mode clearlypredominates (with a share up to more than 55) now withhigher cost this is the least often emerging coordinationmode (partially with only about 12)
Moreover this low frequency of occurrence of hierar-chical coordination goes along with the highest final per-formances compared to the other coordination modes +isclearly runs against intuition since one would expect that thebetter performing coordination mode is selected more oftenas it is the case for lower cost levels as shown in the baselinescenarios (see Section 51)
To illustrate this effect Figure 6 plotsmdashfor the differentcost levels simulatedmdashthe final performances Vt750 and therelative frequencies in the end of the observation time for thecase of the ambidextrous search strategy in the
nondecomposable structure while Table 5 reports on therespective details As it becomes apparent with a cost co-efficient level of z 0003 and higher final performance andfrequency of the hierarchical coordination run apartmdashor putthe other way round the worse performing coordinationmodes emerge more often (a similar effect shows up in theldquoexplorative onlyrdquo search strategy and even for the ldquoex-plorative onlyrdquo it is worth mentioning that the coordinationmodes show similar frequencies of occurrence while the finalperformance obtained with hierarchical coordination(ldquoproposalrdquo) goes remarkably beyond the level obtained withthe other coordination modes)
522 On the Dichotomy of Coordination Modes in Perfor-mance and Frequency Hence an interesting question iswhat may cause this dichotomy in final performance and
0102030405060
085
09
095
1
Decentral
z = 0
Sequential Proposal
Fina
l per
form
ance
Vt=
750
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
(a)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0001(baseline)
(b)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0003
(c)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 0005
(d)
0102030405060
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
Rel
frequ
ency
in t
=75
0 (
)
z = 001
(e)
0102030405060
Rel
frequ
ency
in t
=75
0 (
)
085
09
095
1
Fina
l per
form
ance
Vt=
750
Decentral Sequential Proposal
Final performance Vt=750 Relative frequency in t = 750
z = 002
(f )
Figure 6 Sensitivity of final performance and relative frequencies of coordinationmodes to the cost of effort with the ldquoexploitation and explorationrdquosearch strategy for the nondecomposable interaction structure Each plot represents results of 2500 simulation runs 250 landscapes with 10 runs oneach For parameter settings see Table 2 (a) z 0 (b) z 0001(baseline) (c) z 0003 (d) z 0005 (e) z 001 and (f) z 002
20 Complexity
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
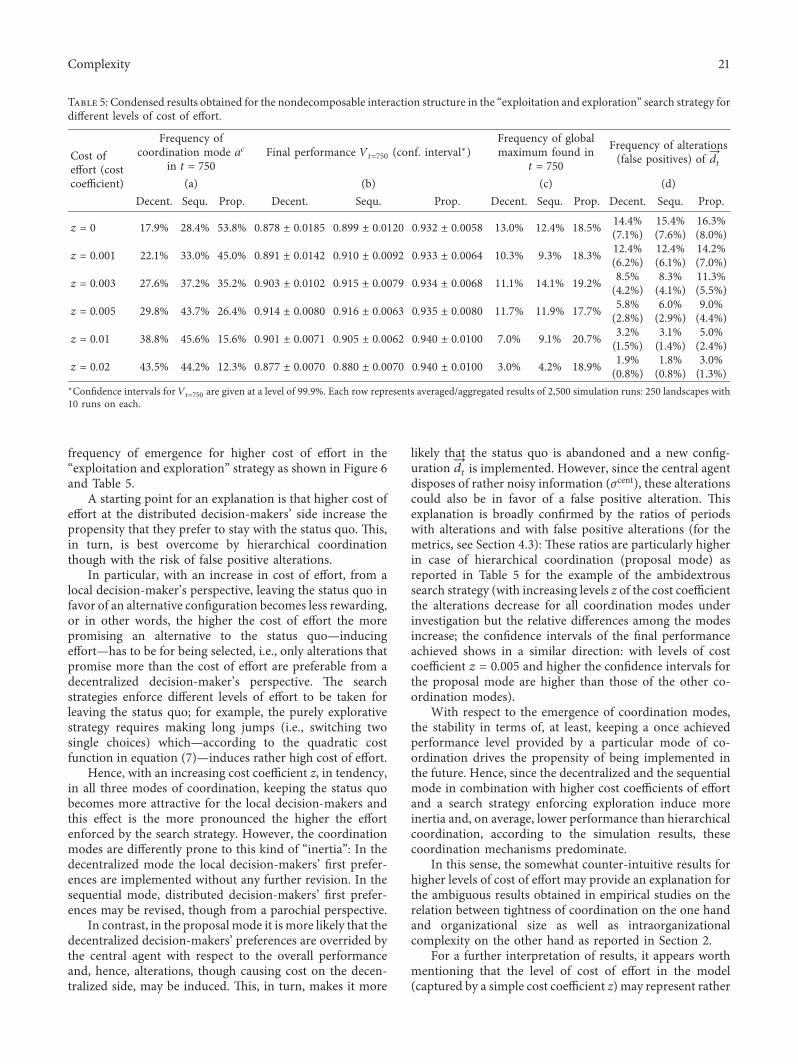
frequency of emergence for higher cost of effort in theldquoexploitation and explorationrdquo strategy as shown in Figure 6and Table 5
A starting point for an explanation is that higher cost ofeffort at the distributed decision-makersrsquo side increase thepropensity that they prefer to stay with the status quo +isin turn is best overcome by hierarchical coordinationthough with the risk of false positive alterations
In particular with an increase in cost of effort from alocal decision-makerrsquos perspective leaving the status quo infavor of an alternative configuration becomes less rewardingor in other words the higher the cost of effort the morepromising an alternative to the status quomdashinducingeffortmdashhas to be for being selected ie only alterations thatpromise more than the cost of effort are preferable from adecentralized decision-makerrsquos perspective +e searchstrategies enforce different levels of effort to be taken forleaving the status quo for example the purely explorativestrategy requires making long jumps (ie switching twosingle choices) whichmdashaccording to the quadratic costfunction in equation (7)mdashinduces rather high cost of effort
Hence with an increasing cost coefficient z in tendencyin all three modes of coordination keeping the status quobecomes more attractive for the local decision-makers andthis effect is the more pronounced the higher the effortenforced by the search strategy However the coordinationmodes are differently prone to this kind of ldquoinertiardquo In thedecentralized mode the local decision-makersrsquo first prefer-ences are implemented without any further revision In thesequential mode distributed decision-makersrsquo first prefer-ences may be revised though from a parochial perspective
In contrast in the proposal mode it is more likely that thedecentralized decision-makersrsquo preferences are overrided bythe central agent with respect to the overall performanceand hence alterations though causing cost on the decen-tralized side may be induced +is in turn makes it more
likely that the status quo is abandoned and a new config-uration dt
rarris implemented However since the central agent
disposes of rather noisy information (σcent) these alterationscould also be in favor of a false positive alteration +isexplanation is broadly confirmed by the ratios of periodswith alterations and with false positive alterations (for themetrics see Section 43) +ese ratios are particularly higherin case of hierarchical coordination (proposal mode) asreported in Table 5 for the example of the ambidextroussearch strategy (with increasing levels z of the cost coefficientthe alterations decrease for all coordination modes underinvestigation but the relative differences among the modesincrease the confidence intervals of the final performanceachieved shows in a similar direction with levels of costcoefficient z 0005 and higher the confidence intervals forthe proposal mode are higher than those of the other co-ordination modes)
With respect to the emergence of coordination modesthe stability in terms of at least keeping a once achievedperformance level provided by a particular mode of co-ordination drives the propensity of being implemented inthe future Hence since the decentralized and the sequentialmode in combination with higher cost coefficients of effortand a search strategy enforcing exploration induce moreinertia and on average lower performance than hierarchicalcoordination according to the simulation results thesecoordination mechanisms predominate
In this sense the somewhat counter-intuitive results forhigher levels of cost of effort may provide an explanation forthe ambiguous results obtained in empirical studies on therelation between tightness of coordination on the one handand organizational size as well as intraorganizationalcomplexity on the other hand as reported in Section 2
For a further interpretation of results it appears worthmentioning that the level of cost of effort in the model(captured by a simple cost coefficient z) may represent rather
Table 5 Condensed results obtained for the nondecomposable interaction structure in the ldquoexploitation and explorationrdquo search strategy fordifferent levels of cost of effort
Cost ofeffort (costcoefficient)
Frequency ofcoordination mode ac
in t 750Final performance Vt750 (conf intervallowast)
Frequency of globalmaximum found in
t 750
Frequency of alterations(false positives) of dt
rarr
(a) (b) (c) (d)Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop Decent Sequ Prop
z 0 179 284 538 0878 plusmn 00185 0899 plusmn 00120 0932 plusmn 00058 130 124 185 144(71)
154(76)
163(80)
z 0001 221 330 450 0891 plusmn 00142 0910 plusmn 00092 0933 plusmn 00064 103 93 183 124(62)
124(61)
142(70)
z 0003 276 372 352 0903 plusmn 00102 0915 plusmn 00079 0934 plusmn 00068 111 141 192 85(42)
83(41)
113(55)
z 0005 298 437 264 0914 plusmn 00080 0916 plusmn 00063 0935 plusmn 00080 117 119 177 58(28)
60(29)
90(44)
z 001 388 456 156 0901 plusmn 00071 0905 plusmn 00062 0940 plusmn 00100 70 91 207 32(15)
31(14)
50(24)
z 002 435 442 123 0877 plusmn 00070 0880 plusmn 00070 0940 plusmn 00100 30 42 189 19(08)
18(08)
30(13)
lowastConfidence intervals for Vt750 are given at a level of 999 Each row represents averagedaggregated results of 2500 simulation runs 250 landscapes with10 runs on each
Complexity 21
different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

different aspects andmdashdepending on its particular con-textmdashthe results of this study show in quite different di-rections For example the cost of effort could captureldquoswitching costsrdquo for altering a status quo in favor of a newsolution which may be specific to a certain branch or in-dustry due to technological aspects [107 108] In this sensethe results may be regarded as an indication that for ex-ample in different branches different coordination modesmight be predominant
In another interpretation cost of effort could capture thecosts for dealing with resistance of certain stakeholders or(emotional) costs for loosing old and building new intra- orextraorganizational relations when new solutions are to beimplemented [109ndash111] Regarded in this sense the resultssuggest that organizations where for example high re-sistance or high relational costs for implementing the ldquonewrdquoare to be expected in tendency might stick to decentralizedcoordination modesmdashthough hierarchical coordinationcould lead to higher levels of performance
6 Conclusion
+is paper presents a computational study on the emergenceof the mode of coordination in the course of an increasingdecision-problem and in consequence a growing number ofdecentralized decision-makers in DDMS In the theoreticalmodel and the simulation model accordingly the mode ofcoordination employed is subject to learning-based emer-gence while the search strategymdashbeing exploitative ex-plorative or of an ambidextrous naturemdashis regarded as given(eg by a central authority) +e same holds for the level ofcost of effort that the distributed decision-makers face forimplementing new solutions
For moderate levels of cost of effort the results suggestthat DDMS facing a growing nondecomposable decision-problem would increasingly employ vertical informationflows broad information and decision-making via hierar-chy rather than granting high autonomy to decentralizeddecision-makers In contrast when growth means thatadditional self-contained decision-problems are to be solvedaccording to the simulation results with the exploitative andthe explorative search strategy no predominance in thecoordination mode appears in an ambidextrous searchstrategy coordination modes tend to prevail that leave thedecision-making authority at the side of decentralized de-cision-makers For the levels of complexity studied resultssuggest that the ambidextrous strategy bears the highestpotential of superior performance while enforcing highlevels of novelty by a ldquopurelyrdquo explorative strategy leads toinferior performance
However the results suggest that the higher the cost ofeffort on the side of decentralized decision-makers are themore likely it may become that those coordination mech-anisms emerge which provide high autonomy to decen-tralized decision-makers though employing hierarchicalcoordination could lead to higher performance obtained bythe DDMS
+ese results could for example be regarded as anexplanation for some ambiguous empirical findings since
different industries may differ in the ldquoswitchingrdquo costs infavor of new solutions due to technological aspects +isstudy may also provide an explanation for organizationalinertia when resistance against change is of relevance orchange comes along with high relational costs to decision-makers
Moreover a particular contribution of this study mayalso lie in its method It appears worth mentioning that withthe computational study introduced here some empiricalfindings related to (the emergence of) the coordinationmode as a part of the boundary system obtained in priorempirical research [26 48ndash51 106] were ldquoreplicatedrdquo Inparticular via growing DDMS ldquofrom scratchrdquo the co-ordination mode at the systemrsquos level emerged from somerather simple (for not to say simplistic) components andbehavioral rules at the individual agentsrsquo level In this sensecomputational studies directed to growth processes couldcontribute to the research in the various domains of orga-nizational thinking since they allow to capture growthprocesses without having to deal for example with meth-odological challenges of longitudinal empirical research aswell as hardly controllable contingent factors [35]
+is study calls for further research activities First it isworth mentioning that this study by far does not representthe width of modes of coordination Hence a natural ex-tension of the research effort presented here would be tointegrate further coordination modes like for examplenegotiations among distributed decision-makers
Second the learning mechanism employed in this studyie reinforcement learning is rather simple and moresophisticated learning modes should be studied For ex-ample in contexts representing organizations resided byhuman decision-makers belief-based learning [92] could bea reasonable alternative
+ird it is to be mentioned that the model presentedhere builds on rather simple cost functions As such themodel does not capture any cost for coordination which ofcourse vary across coordination modes (eg [6]) Fur-thermore the cost of effort could be modeled in a moresophisticated way by for example distinguishing betweenindustry-specific technological ldquoswitching costrdquo cost of ef-fort related to the capabilities of agents as well as costs due tointraorganizational resistance or costs due to specific in-vestments to name but a few
Fourth a natural extension would be to study theemergence of coordination in the context of further types ofcontrols For example in the context of DDMS with humandecision-makers according to the ldquoLevers of Controlrdquoframework [22 106] the emergence of coordination in thecontext of commonly shared values as part of the beliefssystem or of incentive systems being part of the diagnosticcontrol system is of interest +ese ideas relate to thegrowing body of research emphasizing the internal fit andthe balance between the various types of control mecha-nisms Hence further computational studies may build onmore comprehensive models of mechanisms to controldecision-making and examine the interrelations amongthese mechanisms for different contingent factors like forexample the complexity of the decision-problem
22 Complexity
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
Data Availability
No empirical data were used to support this study
Conflicts of Interest
+e author declares that there are no conflicts of interest
References
[1] M Jacob and R Radner Economic 8eory of Teams YaleUniversity Press London UK 1972
[2] F von Martial ldquoCoordinating plans of autonomous agentsrdquoin Lecture Notes in Computer Science (LNCS) SpringerBerlin Germany 1992
[3] T W Malone and K Crowston ldquo+e interdisciplinary studyof coordinationrdquo ACM Computing Surveys vol 26 no 1pp 87ndash119 1994
[4] K M Carley ldquoComputational organizational science andorganizational engineeringrdquo Simulation Modelling Practiceand 8eory vol 10 no 5ndash7 pp 253ndash269 2002
[5] M Wooldridge An Introduction to MultiAgent SystemsWiley Chichester UK 2 edition 2009
[6] Y Cao W Yu W Ren and G Chen ldquoAn overview of recentprogress in the study of distributed multi-agent co-ordinationrdquo Industrial Informatics IEEE Transactions onvol 9 no 1 pp 427ndash438 2013
[7] J D+ompsonOrganizations in Action Social Science Basesof Administrative 8eory McGraw-Hill New York NYUSA 1967
[8] J R Galbraith ldquoOrganization design an information pro-cessing viewrdquo Interfaces vol 4 no 3 pp 28ndash36 1974
[9] M Henry 8e Structuring of Organizations Prentice HallEnglewood Cliffs NJ USA 1979
[10] K A Merchant and W A Van der Stede ManagementControl Systems Performance Measurement Evaluation andIncentives Pearson New York NY USA 4 edition 2017
[11] K Langfield-Smith ldquoA review of quantitative research inmanagement control systems and strategyrdquo in Handbooks ofManagement Accounting Research C S ChapmanA G Hopwood and M D Shields Eds vol 2 pp 753ndash783Elsevier Amsterdam Netherlands 2006
[12] K AMerchant andD T Otley ldquoA review of the literature oncontrol and accountabilityrdquo in Handbooks of ManagementAccounting Research C S Chapman A G Hopwood andM D Shields Eds vol 2 pp 785ndash802 Elsevier AmsterdamNetherlands 2006
[13] E H Durfee ldquoDistributed problem solving and planningrdquo inMulti-Agent Systems and Applications M Luck V MakO Tpnkov et al Eds pp 118ndash149 Springer Berlin Ger-many 2001
[14] V Lesser and D Corkill ldquoChallenges for multi-agent co-ordination theory based on empirical observationsrdquo inProceedings of the 2014 International Conference on Au-tonomous Agents and Multi-Agent Systems pp 1157ndash1160International Foundation for Autonomous Agents andMultiagent Systems Paris France May 2014
[15] A H Van de Ven M Ganco and C R Hinings ldquoReturningto the frontier of contingency theory of organizational andinstitutional designsrdquo 8e Academy of Management Annalsvol 7 no 1 pp 393ndash440 2013
[16] H A Simon ldquo+e architecture of complexityrdquo Proceedings ofthe American Philosophical Society vol 106 no 6pp 467ndash482 1962
[17] J W Rivkin and N Siggelkow ldquoPatterned interactions incomplex systems implications for explorationrdquo Manage-ment Science vol 53 no 7 pp 1068ndash1085 2007
[18] N Siggelkow ldquoMisperceiving interactions among comple-ments and substitutes organizational consequencesrdquoManagement Science vol 48 no 7 pp 900ndash916 2002
[19] H A Simon ldquoA behavioral model of rational choicerdquo 8eQuarterly Journal of Economics vol 69 no 1 pp 99ndash1181955
[20] J G March ldquoExploration and exploitation in organizationallearningrdquo Organization Science vol 2 no 1 pp 71ndash87 1991
[21] O Baumann J Schmidt and N Stieglitz ldquoEffective search inrugged performance landscapes a review and outlookrdquoJournal of Management vol 45 no 1 pp 285ndash318 2019
[22] R Simons Levers of Control How Managers Use InnovativeControl Systems to Drive Strategic Renewal Harvard BusinessPress Brighton MA USA 1994
[23] S K Widener ldquoAn empirical analysis of the levers of controlframeworkrdquo Accounting Organizations and Society vol 32no 7-8 pp 757ndash788 2007
[24] A M Kruis R F Spekle and S K Widener ldquo+e levers ofcontrol framework an exploratory analysis of balancerdquoManagement Accounting Research vol 32 pp 27ndash44 2016
[25] J Bisbe and D Otley ldquo+e effects of the interactive use ofmanagement control systems on product innovationrdquo Ac-counting Organizations and Society vol 29 no 8pp 709ndash737 2004
[26] D S Bedford ldquoManagement control systems across differentmodes of innovation implications for firm performancerdquoManagement Accounting Research vol 28 pp 12ndash30 2015
[27] M T Hannan and J Freeman ldquoStructural inertia and or-ganizational changerdquo American Sociological Review vol 49no 2 pp 149ndash164 1984
[28] A Basaure H Suomi and H Hammainen ldquoTransaction vsswitching costs-comparison of three core mechanisms formobile marketsrdquo Telecommunications Policy vol 40 no 6pp 545ndash566 2016
[29] T A Burnham J K Frels and V Mahajan ldquoConsumerswitching costs a typology antecedents and consequencesrdquoJournal of the Academy of Marketing Science vol 31 no 2pp 109ndash126 2003
[30] N Agmon S Kraus and G A Kaminka ldquoMulti-robotperimeter patrol in adversarial settingsrdquo in Proeedings of the2008 IEEE International Conference on Robotics and Auto-mation pp 2339ndash2345 Pasadena CA USA May 2008
[31] J Le Ny M Dahleh and E Feron ldquoMulti-agent task as-signment in the bandit frameworkrdquo in Proceedings of the2006 45th IEEE Conference on Decision and Controlpp 5281ndash5286 IEEE San Diego CA USA December 2006
[32] Y-H Lyu and D Balkcom ldquoOptimal trajectories for kine-matic planar rigid bodies with switching costsrdquo 8e In-ternational Journal of Robotics Research vol 35 no 5pp 454ndash475 2015
[33] K I J Ho and J Sum ldquoScheduling jobs with multitaskingand asymmetric switching costsrdquo in Proceedings of the 2017IEEE International Conference on Systems Man and Cy-bernetics (SMC) pp 2927ndash2932 Miyazaki Japan May 2017
[34] T Le C Szepesvari and R Zheng ldquoSequential learning formulti-channel wireless network monitoring with channelswitching costsrdquo IEEE Transactions on Signal Processingvol 62 no 22 pp 5919ndash5929 2014
[35] J P Davis K M Eisenhardt and C B Bingham ldquoDe-veloping theory through simulation methodsrdquo Academy ofManagement Review vol 32 no 2 pp 480ndash499 2007
Complexity 23
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
[36] J R Harrison Z Lin G R Carroll and K M CarleyldquoSimulation modeling in organizational and managementresearchrdquo Academy of Management Review vol 32 no 4pp 1229ndash1245 2007
[37] F Wall ldquoAgent-based modeling in managerial science anillustrative survey and studyrdquo Review of Managerial Sciencevol 10 no 1 pp 135ndash193 2016
[38] S Kauffman and S Levin ldquoTowards a general theory ofadaptive walks on rugged landscapesrdquo Journal of 8eoreticalBiology vol 128 no 1 pp 11ndash45 1987
[39] S A Kauffman 8e Origins of Order Self-Organization andSelection in Evolution Oxford University Press Oxford UK1993
[40] F Heylighen ldquoSelf-organization in communicating groupsthe emergence of coordination shared references and col-lective intelligencerdquo in Complexity Perspectives on LanguageCommunication and Society N Massip-Bonet andA Bastardas-Boada Eds pp 117ndash149 Springer BerlinGermany 2013
[41] R Selten and M Warglien ldquo+e emergence of simple lan-guages in an experimental coordination gamerdquo Proceedingsof the National Academy of Sciences vol 104 no 18pp 7361ndash7366 2007
[42] G Devetag and A Ortmann ldquoWhen and why A criticalsurvey on coordination failure in the laboratoryrdquo Experi-mental Economics vol 10 no 3 pp 331ndash344 2007
[43] W Hichri and A Kirman ldquo+e emergence of coordinationin public good gamesrdquo 8e European Physical Journal Bvol 55 no 2 pp 149ndash159 2007
[44] R Olfati-Saber J A Fax and R M Murray ldquoConsensus andcooperation in networked multi-agent systemsrdquo Proceedingsof the IEEE vol 95 no 1 pp 215ndash233 2007
[45] M Niazi and A Hussain ldquoAgent-based computing frommulti-agent systems to agent-based models a visual surveyrdquoScientometrics vol 89 no 2 pp 479ndash499 2011
[46] M Meyer I Lorscheid and G Klaus ldquo+e development ofsocial simulation as reflected in the first ten years of JASSS acitation and co-citation analysisrdquo Journal of Artificial Soci-eties and Social Simulation vol 12 no 4 2009
[47] N R Jennings K Sycara and M Wooldridge ldquoA roadmapof agent research and developmentrdquo Autonomous Agentsand Multi-Agent Systems vol 1 1998
[48] T Davila ldquoAn exploratory study on the emergence ofmanagement control systems formalizing human resourcesin small growing firmsrdquo Accounting Organizations andSociety vol 30 no 3 pp 223ndash248 2005
[49] N B Macintosh and R L Daft ldquoManagement controlsystems and departmental interdependencies an empiricalstudyrdquo Accounting Organizations and Society vol 12 no 1pp 49ndash61 1987
[50] R H Chenhall and D Morris ldquo+e impact of structureenvironment and interdependence on the perceived use-fulness of management accounting systemsrdquo AccountingReview vol 61 no 1 pp 16ndash35 1986
[51] R H Chenhall ldquoManagement control systems design withinits organizational context findings from contingency-basedresearch and directions for the futurerdquo Accounting Orga-nizations and Society vol 28 no 2-3 pp 127ndash168 2003
[52] A Davila G Foster and D Oyon ldquoAccounting and controlentrepreneurship and innovation venturing into new re-search opportunitiesrdquo European Accounting Review vol 18no 2 pp 281ndash311 2009
[53] R Simons A Davila and R S Kaplan Performance Mea-surement amp Control Systems for Implementing StrategyPrentice Hall Upper Saddle River NJ USA 2000
[54] M-H Chang and J E Harrington ldquoAgent-based models oforganizationsrdquo in Handbook of Computational EconomicsAgent-Based Computational Economics Volume 2 BookSection 26 L Tesfatsion and K L Judd Eds pp 1273ndash1337Elsevier Amsterdam Netherlands 2006
[55] S K Ethiraj and D Levinthal ldquoBounded rationality and thesearch for organizational architecture an evolutionaryperspective on the design of organizations and theirevolvabilityrdquo Administrative Science Quarterly vol 49 no 3pp 404ndash437 2004
[56] O Baumann and N Siggelkow ldquoDealing with complexityintegrated vs chunky search processesrdquo Organization Sci-ence vol 24 no 1 pp 116ndash132 2013
[57] N Siggelkow and J W Rivkin ldquoSpeed and search designingorganizations for turbulence and complexityrdquo OrganizationScience vol 16 no 2 pp 101ndash122 2005
[58] N Siggelkow and D A Levinthal ldquoTemporarily divide toconquer centralized decentralized and reintegrated orga-nizational approaches to exploration and adaptationrdquo Or-ganization Science vol 14 no 6 pp 650ndash669 2003
[59] S K Ethiraj and D Levinthal ldquoModularity and innovation incomplex systemsrdquo Management Science vol 50 no 2pp 159ndash173 2004b
[60] G Gavetti and D Levinthal ldquoLooking forward and lookingbackward cognitive and experiential searchrdquo AdministrativeScience Quarterly vol 45 no 1 pp 113ndash137 2000
[61] F A Csaszar and N Siggelkow ldquoHow much to copy De-terminants of effective imitation breadthrdquo OrganizationScience vol 21 no 3 Article ID 661676 2010
[62] J W Rivkin ldquoImitation of complex strategiesrdquoManagementScience vol 46 no 6 pp 824ndash844 2000
[63] G Dosi D Levinthal and L Marengo ldquoBridging contestedterrain linking incentive-based and learning perspectives onorganizational evolutionrdquo Industrial and Corporate Changevol 12 no 2 pp 413ndash436 2003
[64] F Wall ldquoEffects of switching costs in distributed problem-solving systemsrdquo in Distributed Computing and ArtificialIntelligence 15th International Conference F De La PrietaS Omatu and A Fernndez-Caballero Eds pp 1ndash9Springer International Publishing 2019
[65] N R Jennings ldquoCommitments and conventions thefoundation of coordination in multi-agent systemsrdquo 8eKnowledge Engineering Review vol 8 no 3 pp 223ndash2501993
[66] V R Lesser ldquoReflections on the nature of multi-agent co-ordination and its implications for an agent architecturerdquoAutonomous Agents and Multi-Agent Systems vol 1 no 1pp 89ndash111 1998
[67] F A Oliehoek and C Amato A Concise Introduction toDecentralized POMDPs Vol 1 Springer Berlin Germany2016
[68] C Amato ldquoDecision-making under uncertainty in multi-agent and multi-robot systems planning and learningrdquo inProceedings of the Twenty-Seventh International Joint Con-ference on Artificial Intelligence (IJCAI-18) pp 5662ndash5666Stockholm Sweden July 2018
[69] A Torrentildeo E Onaindia A Komenda and M StolbaldquoCooperative multi-agent planningrdquo ACM Computing Sur-veys vol 50 no 6 pp 1ndash32 2017
24 Complexity
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom
[70] A Torrentildeo E Onaindia and O Sapena ldquoFmap distributedcooperative multi-agent planningrdquo Applied Intelligencevol 41 no 2 pp 606ndash626 2014
[71] N Luis S Fernandez and D Borrajo ldquoPlan merging byreuse for multi-agent planningrdquo Applied Intelligence 2019
[72] D Borrajo ldquoMulti-agent planning by plan reuserdquo in Pro-ceedings of the 2013 International Conference on AutonomousAgents and Multi-Agent Systems pp 1141-1142 In-ternational Foundation for Autonomous Agents and Mul-tiagent Systems Saint Paul MN USA May 2013
[73] R Li T Michael M Emmerich et al ldquoMixed-integer NKlandscapesrdquo in Parallel Problem Solving from Nature-PPSNIX Volume 4193 of Lecture Notes in Computer Science BookSection 5 T P Runarsson H-G Beyer E Burke et al Edspp 42ndash51 Springer Berlin Germany 2006
[74] A Lee ldquoSection b272 NK fitness landscapesrdquo in 8eHandbook of Evolutionary Computation T Back D Fogeland Z Michalewicz Eds pp B275ndashB2710 Oxford Uni-versity Press Oxford UK 1997
[75] F A Csaszar ldquoA note on how NK landscapes workrdquo Journalof Organization Design vol 7 no 1 p 15 2018
[76] L Tesfatsion ldquoAgent-based computational economicsmodeling economies as complex adaptive systemsrdquo In-formation Sciences vol 149 no 4 pp 262ndash268 2003
[77] N Gilbert and G Klaus Troitzsch Simulation for the SocialScientist Open University Press Buckingham UK 2 edition2005
[78] R Schmalensee ldquoIndustrial economics an overviewrdquo 8eEconomic Journal vol 98 no 392 pp 643ndash681 1988
[79] J M Epstein ldquoAgent-based computational models andgenerative social sciencerdquo in Generative Social ScienceStudies in Agent-Based Computational Modeling Book Sec-tion 1 J M Epstein Ed pp 4ndash46 Princeton UniversityPress Princeton NJ USA 2006
[80] K Safarzynska and J van den Bergh ldquoEvolutionary modelsin economics a survey of methods and building blocksrdquoJournal of Evolutionary Economics vol 20 no 3 pp 329ndash373 2010
[81] D Lazer and A Friedman ldquo+e network structure of ex-ploration and exploitationrdquo Administrative Science Quar-terly vol 52 no 4 pp 667ndash694 2007
[82] G P Baker ldquoIncentive contracts and performance mea-surementrdquo Journal of Political Economy vol 100 no 3pp 598ndash614 1992
[83] R A Lambert ldquoContracting theory and accountingrdquo Journalof Accounting and Economics vol 32 no 1ndash3 pp 3ndash87 2001
[84] R Axelrod 8e Evolution of Cooperation Basic Books IncNew York NY USA 1984
[85] B Levitan and S Kauffman ldquoAdaptive walks with noisyfitness measurementsrdquo Molecular Diversity vol 1 no 1pp 53ndash68 1995
[86] F Wall ldquoCoordination with erroneous communicationresults of an agent-based simulationrdquo Knowledge and In-formation Systems vol 61 no 1 pp 161ndash195 2018
[87] T W Malone ldquoModeling coordination in organizations andmarketsrdquo Management Science vol 33 no 10 pp 1317ndash1332 1987
[88] T A de Vries J R Hollenbeck R B Davison F Walter andG S van der Vegt ldquoManaging coordination in multiteamsystems integrating micro and macro perspectivesrdquo Acad-emy of Management Journal vol 59 no 5 pp 1823ndash18442016
[89] R S Sutton and A G Barto Reinforcement Learning AnIntroduction MIT Press Cambridge UK 2nd edition 2012
[90] L P Kaelbling M L Littman and A W Moore ldquoRe-inforcement learning a surveyrdquo Journal of Artificial In-telligence Research vol 4 pp 237ndash285 1996
[91] R R Bush and F Mosteller Stochastic Models for LearningJohn Wiley amp Sons Oxford UK 1955
[92] T Brenner ldquoAgent learning representation advice onmodelling economic learningrdquo in Handbook of Computa-tional Economics Agent-Based Computational EconomicsVolume 2 Book Section 18 L Tesfatsion and K L Judd Edspp 895ndash947 Elsevier Amsterdam Netherlands 2006
[93] P R Lawrence and J W Lorsch ldquoDifferentiation and in-tegration in complex organizationsrdquo Administrative ScienceQuarterly vol 12 no 1 pp 1ndash47 1967
[94] T C Redman ldquo+e impact of poor data quality on the typicalenterpriserdquo Communications of the ACM vol 41 no 2pp 79ndash82 1998
[95] T Borgers and R Sarin ldquoNaive reinforcement learning withendogenous aspirationsrdquo International Economic Reviewvol 41 no 4 pp 921ndash950 2000
[96] I Lorscheid B-O Heine and M Meyer ldquoOpening theldquoblack boxrdquo of simulations increased transparency and ef-fective communication through the systematic design ofexperimentsrdquo Computational and Mathematical Organiza-tion 8eory vol 18 no 1 pp 22ndash62 2012
[97] K M Eisenhardt and C B Schoonhoven ldquoOrganizationalgrowth linking founding team strategy environment andgrowth among us semiconductor ventures 1978ndash1988rdquoAdministrative Science Quarterly vol 35 no 3 pp 504ndash5291990
[98] A Lockett J Wiklund P Davidsson and S Girma ldquoOrganicand acquisitive growth re-examining testing and extendingpenrosersquos growth theoryrdquo Journal of Management Studiesvol 48 no 1 pp 48ndash74 2011
[99] S Majumdar ldquoModelling growth strategy in small entre-preneurial business organisationsrdquo 8e Journal of Entre-preneurship vol 17 no 2 pp 157ndash168 2008
[100] A Querbes and K Frenken ldquoGrounding the ldquomirroringhypothesisrdquo towards a general theory of organization designin new product developmentrdquo Journal of Engineering andTechnology Management vol 47 pp 81ndash95 2018
[101] F Wall ldquoEmergence of task formation in organizationsbalancing unitsrsquo competence and capacityrdquo Journal of Ar-tificial Societies and Social Simulation vol 21 no 2 pp 1ndash252018
[102] B L Welch ldquo+e significance of the differences between twomeans when the population variances are unequalrdquo Bio-metrika vol 29 no 3-4 pp 350ndash362 1938
[103] M Averill Law Simulation Modeling and AnalysisMcGraw-Hill New York NY USA 4th edition 2007
[104] K M Eisenhardt ldquoAgency theory an assessment and re-viewrdquo Academy of Management Review vol 14 no 1pp 57ndash74 1989
[105] R K Sah and J E Stiglitz ldquo+e architecture of economicsystems hierarchies and polyarchiesrdquo American EconomicReview vol 76 no 4 pp 716ndash727 1986
[106] R Simons ldquoHow new top managers use control systems aslevers of strategic renewalrdquo Strategic Management Journalvol 15 no 3 pp 169ndash189 1994b
[107] D Demirhan V S Jacob and S Raghunathan ldquoStrategic itinvestments the impact of switching cost and declining itcostrdquoManagement Science vol 53 no 2 pp 208ndash226 2007
[108] K Monteverde and D J Teece ldquoSupplier switching costs andvertical integration in the automobile industryrdquo 8e BellJournal of Economics vol 13 no 1 pp 206ndash213 1982
Complexity 25
[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

[109] M T Hannan L Polos and G R Carroll ldquoCascading or-ganizational changerdquo Organization Science vol 14 no 5pp 463ndash482 2003
[110] H-W Kim ldquo+e effects of switching costs on user resistanceto enterprise systems implementationrdquo IEEE Transactions onEngineering Management vol 58 no 3 pp 471ndash482 2011
[111] G L Polites and E Karahanna ldquoShackled to the status quothe inhibiting effects of incumbent system habit switchingcosts and inertia on new system acceptancerdquoMIS Quarterlyvol 36 no 1 pp 21ndash42 2012
26 Complexity
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom