engenharia mecânica - fenix.tecnico.ulisboa.pt · desenvolvimento de um sistema novo de...
TRANSCRIPT
Desenvolvimento de um sistema novo
de aproveitamento de energia das ondas
André Luiz Leitão Schmidt
Dissertação para obtenção do Grau de Mestre em
Engenharia Mecânica
Júri
Presidente: Prof. Luís Rego da Cunha de Eça
Orientador: Prof. José Maria Campos da Silva André
Co-orientador: Doutor João Carlos de Campos Henriques
Vogais: Doutor Paulo Justino
Prof. António Alberto Pires Silva
Outubro de 2011


Agradecimentos
Em primeiro lugar, quero expressar o meu agradecimento ao Professor José Maria André, orientador desta
dissertação, pela sua disponibilidade, pelo rigor cientí�co imposto e pelas críticas construtivas sugeridas durante
o período de elaboração deste trabalho.
Em segundo lugar, mas não menos importante, agradeço ao Doutor João Henriques, co-orientador desta
dissertação, pela disponibilidade relevada ao longo da execução desta, e também pelas críticas, sugestões e
soluções apresentadas durante toda a realização deste trabalho.
Aos meus pais e irmãos, pelo constante e importante apoio que me deram ao longo da elaboração desta
dissertação.
E �nalmente a todos aos meus amigos de curso, de residência e também de adolescência, pela sua amizade e
companheirismo ao longo do meu percurso académico.
i

ii
Resumo
O constante aumento do preço do petróleo, a sua provável escassez e as consequências da sua intensa utilização
e dependência tem levado o Homem a descobrir novos métodos de extrair/obter energia de uma maneira e�caz
e sobretudo rentável.
A área de extracção de energia das ondas e das marés é relativamente nova, e até há pouco tempo atrás,
muito pouco explorada. Diante do seu enorme potencial, o interesse e os investimentos multiplicaram-se de
maneira que existem, actualmente, diversos dispositivos e sistemas de extracção de energia, quer em fase de
concepção, quer em fase de construção de protótipos. Apesar disso, nenhuma tecnologia está su�cientemente
desenvolvida a ponto de podermos rentabilizar essa mesma extracção.
Assim, este trabalho teve como objectivo uma melhor compreensão e possível optimização de um sistema de
extracção de energia das ondas, através do estudo do seu movimento (arfagem, avanço-recuo e cabeceio),
originado pela excitação das ondas do mar. O sistema foi simulado computacionalmente e o algoritmo de
cálculo foi implementado na linguagem de programação C++.
Da análise dos resultados obtidos, pudemos veri�car que, para um estudo sem forças de radiação, os valores
no domínio da frequência comparam muito bem com os valores no domínio do tempo. Já os resultados do
estudo com a inclusão dos termos de radiação necessitaram de um pequeno ajuste prévio no que se refere às
funções de resposta à impulso, Kij . Devido à insu�ciência de dados necessários para calcular de uma maneira
completa os termos Kij , foi necessário fazer uma aproximação por funções exponenciais negativas das partes
de alta frequência das curvas de b∗ij , caso contrário os resultados no domínio do tempo divergiriam. Corrigido
esse problema, os resultados obtidos em ambos os domínios estiveram bastante próximos. Por último, fez-se
uma análise dos efeitos não-lineares da inclusão de um lastro vertical no sistema.
Palavras-chave: energia, ondas, simulação numérica, movimento, comportamento
iii

iv

Abstract
The continuous in�ation of oil prices, along with its probable scarcity and well-known consequences that
comes from its utilization, has had an important contribute to the discovery and development of new ways
and methods to extract/produce energy e�ciently and pro�tably.
The extraction of wave and tidal energy is a relatively new area, and until recently, poorly explored. Because
of its huge potential, the interest and investment have grown over the past few years in such a way that
nowadays there are numerous energy extraction devices and systems, both in conception and construction
phases. Nevertheless, all the existing technologies are not yet developed to a degree where we can extract
energy in a pro�table way.
Due to that fact, the aim of this thesis is to better understand and possibly optimize a wave energy extraction
system. In order to do so, the system's movement (heave, surge and pitch) will be analyzed and studied
when subjected to exterior forces (in this case, waves), using a computer based program created with C++
language.
The results of the study neglecting radiation forces revealed that on both domains, time and frequency, all
the values were almost identical. Prior to obtaining results from the study including radiation forces, it was
necessary to adjust certain values of the impulse response functions Kij . This was caused by insu�cient data
that was available in order to calculate the values of Kij . The adjustment was made by approximating the
high frequency parts of the b∗ij curves using negative exponential functions. The de�ciency was corrected and
the results were once again evenly matched on both domains. The last study made was to determine the
non-linear e�ects of the inclusion of a vertical ballast on the system.
Palavras-chave: energy, waves, numerical simulation, movement, behavior
v

vi
Índice
1 Introdução 1
1.1 A energia e a sua importância . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Água do mar como fonte de energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Problemas inerentes à extracção da energia das ondas . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Impacto ambiental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5 Meios de extracção de energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5.1 Atenuador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.5.2 Sistema Oscilante de Simetria Axial . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5.3 Conversores Oscilantes de Translação de Ondas . . . . . . . . . . . . . . . . . . . . . 7
1.5.4 Coluna de Água Oscilante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5.5 Dispositivo de Galgamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.5.6 Dispositivo Submerso de Diferença de Pressão . . . . . . . . . . . . . . . . . . . . . . 8
1.6 Novo dispositivo de aproveitamento de energia das ondas . . . . . . . . . . . . . . . . . . . . 9
1.7 Objectivos e estrutura da dissertação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2 Formulação Matemática 13
2.1 Teoria linear das ondas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Equações de movimento de um corpo �utuante . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.1 Força de impulsão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.2 Força de inércia do corpo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.3 Força de radiação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.4 Força de difracção ou excitação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2.5 Força do cabo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2.6 Manipulações e simpli�cações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3 Solução numérica das equações de movimento . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4 Integração numérica da força de radiação . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.5 Domínio da frequência - regime permanente . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3 Análise de Resultados 29
3.1 Comparação do domínio do tempo com a da frequência . . . . . . . . . . . . . . . . . . . . . 29
3.1.1 Cálculos sem as componentes de radiação . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1.1.1 Modo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.1.1.2 Modo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.1.1.3 Modo 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.1.2 Cálculos com as componentes de radiação . . . . . . . . . . . . . . . . . . . . . . . . 36
vii
3.1.2.1 Modo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.1.2.2 Modo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.1.2.3 Modo 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.2 Introdução do lastro no sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.2.1 Efeito produzido no movimento do �utuador . . . . . . . . . . . . . . . . . . . . . . . 41
3.2.1.1 Modo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.2.1.2 Modo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.2.1.3 Modo 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.2.2 Energia e Potência extraída . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4 Conclusões 47
Bibliogra�a 50
A Adimensionalizações do WAMIT 53
A.1 Força de Difracção . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
A.2 Massas adicionadas a∞ij . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
A.3 Função de história K . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
B Cálculo das amplitudes no domínio da frequência 57
B.1 Modos 1 e 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
B.2 Modo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
viii
Lista de Figuras
1.1 Comparação de valores de investimentos �verde� entre diferentes países. . . . . . . . . . . . . 2
1.2 Distribuição mundial do nível de energia das ondas, para valores médios anuais em kW/m e
em águas profundas [1]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Imagem do Pelamis no mar [1]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Imagem do Pelamis em terra [2]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Exemplo de um pequeno sistema oscilante [3]. . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.6 Exemplo de um conversor oscilante de translação das ondas [3]. . . . . . . . . . . . . . . . . 7
1.7 Visualização de uma estrutura OWC [4]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.8 Imagem da Central do Pico [1]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.9 Exemplo de um dispositivo de galgamento [3]. . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.10 Exemplo de um dispositivo submerso de diferença de pressão [3]. . . . . . . . . . . . . . . . . 9
1.11 Sistema oscilante [5]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.12 Modelo do �utuador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1 Graus de Liberdade de um corpo rígido [6]. . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 W55 corresponde à área azul. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3 Descentramento do cabo em relação ao centro de massa do �utuador [7]. . . . . . . . . . . . 19
2.4 Exemplo dos limites de um integral de convolução [8]. . . . . . . . . . . . . . . . . . . . . . . 25
3.1 Posição do �utuador para o modo 1 a divergir. . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.2 Coordenadas do �utuador para os modos 1 e 5 a divergirem. . . . . . . . . . . . . . . . . . . 30
3.3 Força de excitação para o modo 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.4 Posição, velocidade e aceleração do �utuador no domínio do tempo e seus erros, para o modo 1. 33
3.5 Força de excitação para o modo 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.6 Posição, velocidade e aceleração do �utuador no domínio do tempo e seus erros, para o modo 3. 34
3.7 Momento de excitação para o modo 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.8 Rotação, velocidade e aceleração angulares do �utuador no domínio do tempo e seus erros,
para o modo 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.9 Coe�cientes de amortecimento em função da frequência. . . . . . . . . . . . . . . . . . . . . 37
3.10 Valores de K∗ij aproximados pela função exponencial e os calculados previamente. . . . . . . . 38
3.11 Posição, velocidade e aceleração do �utuador e seus erros em ambos os domínios, para o modo 1. 39
3.12 Posição, velocidade e aceleração do �utuador e seus erros em ambos os domínios, para o modo 3. 40
3.13 Rotação, velocidade e aceleração angulares do �utuador e seus erros em ambos os domínios,
para o modo 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.14 Posição, velocidade e aceleração do �utuador para o modo 1. . . . . . . . . . . . . . . . . . . 42
3.15 Posição, velocidade e aceleração do �utuador para o modo 3. . . . . . . . . . . . . . . . . . . 43
ix
3.16 Rotação, velocidade e aceleração angulares do �utuador para o modo 5. . . . . . . . . . . . . 44
3.17 Posição do �utuador para o modo 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.18 Posição do lastro desde o início da simulação. . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.19 Posições dos lastros desde o início da simulação. . . . . . . . . . . . . . . . . . . . . . . . . . 46
x

Lista de Tabelas
A.1 Valores do expoente m em função do modo i . . . . . . . . . . . . . . . . . . . . . . . . . . 54
A.2 Valores dos coe�cientes de massa adicionada . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
A.3 Valores do expoente k em função do modo . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
A.4 Valores do expoente s em função do K . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
xi

xii

Lista de abreviaturas e símbolos
Abreviaturas
CAO = Coluna de Água Oscilante
RHS = Right Hand Side (Segundo membro de uma equação)
Símbolos Romanos
H = altura de onda
T = período de onda
Fimp = força de impulsão do �utuador
Fine = força de inércia do �utuador
Fd = força (momento) de difracção do �utuador
Fr = força de radiação do �utuador
Fc = força do cabo
FineL = força de inércia do lastro
FimpL = força de impulsão do lastro
FgravL = força gravítica exercida pelo lastro
AF = área de secção do �utuador, em relação ao nível do mar
g = aceleração gravítica
g ′ = aceleração gravítica equivalente
Mij = matriz de inércia associada ao �utuador
K = função de resposta à impulso
Aω = amplitude da onda incidente
mL = massa do lastro
a∞ = coe�cientes de massa adicionada
Bij = coe�cientes de amortecimento por radiação
mF = massa do �utuador
xiii

R = raio do �utuador
d = diâmetro do �utuador
W55 = momento de inércia da área alterada pelo movimento do �utuador
I Fyy = momento de inércia do �utuador em relação ao eixo yy
t = tempo absoluto
ξg = pontos de integração de Gauss-Legendre
wg = pesos de integração de Gauss-Legendre
N = número de intervalos de integração
EL = energia potencial armazenada no lastro
PL = potência média do lastro
Yi = amplitude complexa de posição
Vi = amplitude complexa de velocidade
Símbolos Gregos
ξ = posição do �utuador
ξ = velocidade do �utuador
ξ = aceleração do �utuador
ρ = massa volúmica (densidade) da água
ρL = massa volúmica (densidade) do lastro
Γ(ω) = coe�ciente da força de excitação
φ(ω) = fase da onda incidente
ξL = aceleração do lastro
ω = frequência
τ = intervalo de tempo
τm = pontos pertencentes a um intervalo de tempo
ε = erro médio
xiv

Capítulo 1
Introdução
1.1 A energia e a sua importância
Ao longo do tempo o conceito de energia andou lado a lado com o ser humano. Assim,
juntamente com ele, o conceito de energia sofreu alterações e evoluiu, embora a sua contri-
buição tenha permanecido inalterada. Da Idade da Pedra até os tempos modernos, o Homem
sempre precisou de energia, sob várias formas, de modo a satisfazer as suas necessidades bási-
cas. Assim, com o passar do tempo e a consequente modernização, a importância da energia
tornou-se tão extrema ao ponto de hoje em dia o mundo girar à volta de fontes energéticas,
sendo estas capazes de destabilizar economias e provocar guerras.
Prova disto foram os efeitos que a dependência do petróleo e seus derivados provocou, e
ainda provoca, ao ser humano. Sendo a principal fonte energética usada nos últimos 50 anos,
muito devido ao seu poder (densidade) energético, a sua utilização e in�uência estende-se a
praticamente todas as matérias-primas, de modo que qualquer ameaça à sua produção/venda
é rapidamente alastrada a todos tipos de bens, causando in�ação e escassez.
As noções acima descritas já são do conhecimento da população mundial há algumas décadas,
e desde esse tempo o mundo tem procurado por soluções alternativas para ao mesmo tempo
acabar com a dependência do petróleo, minimizar os seus efeitos sobre o meio ambiente e
manter/alcançar o crescimento e a prosperidade económica e social.
Diante desta situação, o Homem passou a dar mais importância aos recursos naturais e como
extrair energia desses mesmos recursos. Ao longo dos últimos 30 anos, pudemos assistir a
grandes investimentos (�gura 1.1) e avanços tecnológicos nas áreas da energia solar, hídrica
(barragens), biomassa e mais recentemente na área da energia eólica e da energia das ondas,
como veremos na próxima secção.
1
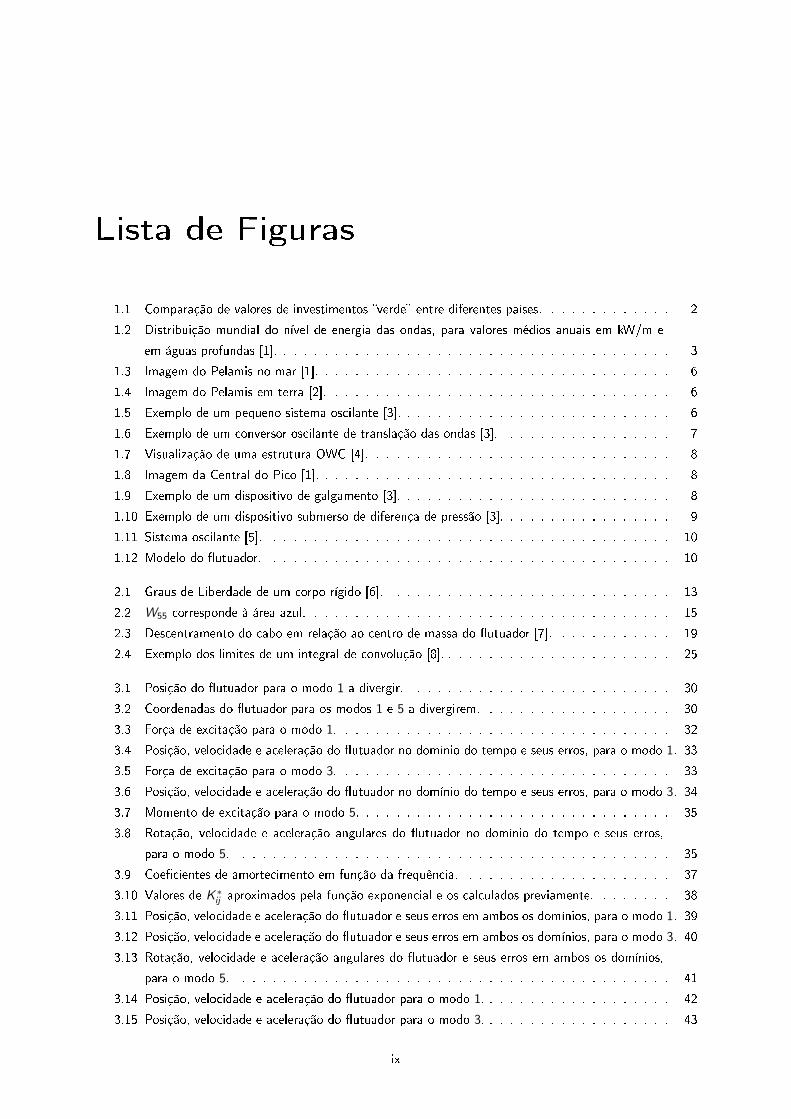
A tentativa de tornar as energias renováveis sustentáveis e o aperfeiçoamento das técnicas
de extracção acima citadas exigiu, e ainda exige, elevado grau de investimentos por parte
de empresas e países interessados na obtenção de energia sob essas formas, o que impediu
durante algum tempo o seu desenvolvimento [9].
Figura 1.1: Comparação de valores de investimentos �verde� entre diferentes países.
1.2 Água do mar como fonte de energia
As colossais massas de água, que cobrem cerca de dois terços do planeta, constituem o maior
colector de energia solar imaginável. Os raios solares aquecem não apenas a água, como tam-
bém toda a superfície terrestre, originando diferenças de pressão. Essas diferenças de pressão
dão origem aos ventos, que por sua vez produzem as chamadas ondas de superfície. Final-
mente, as marés, originadas, entre outras coisas, pela atracção lunar, também representam
uma tentadora fonte energética. Em conjunto, a temperatura dos oceanos, as ondas e as
marés poderiam proporcionar muito mais energia do que a humanidade seria capaz de gastar
- hoje ou no futuro, mesmo considerando um aumento signi�cativo do consumo global.
As ondas são formadas pelo sopro dos ventos sobre a água e ocorrem unicamente na superfície
do mar, ou perto dela [3]. O tamanho das ondas geradas depende da velocidade do vento, da
sua duração e da sua distância da água sobre a qual sopra (ex. o fetch). O movimento da
água daí resultante transporta energia cinética que pode ser aproveitada por dispositivos de
energia das ondas. Numa grande bacia como o Oceano Atlântico, ondas de diferentes origens
sobrepõem-se e formam grupos de ondas, nos quais atravessam o oceano quase sem perda de
energia. A densidade energética (o recurso disponível por unidade de área) das ondas é 10
vezes mais alta do que a da energia eólica e 100 vezes mais alta do que a da radiação solar,
2
o que demonstra o inegável potencial energético das ondas oceânicas [3].
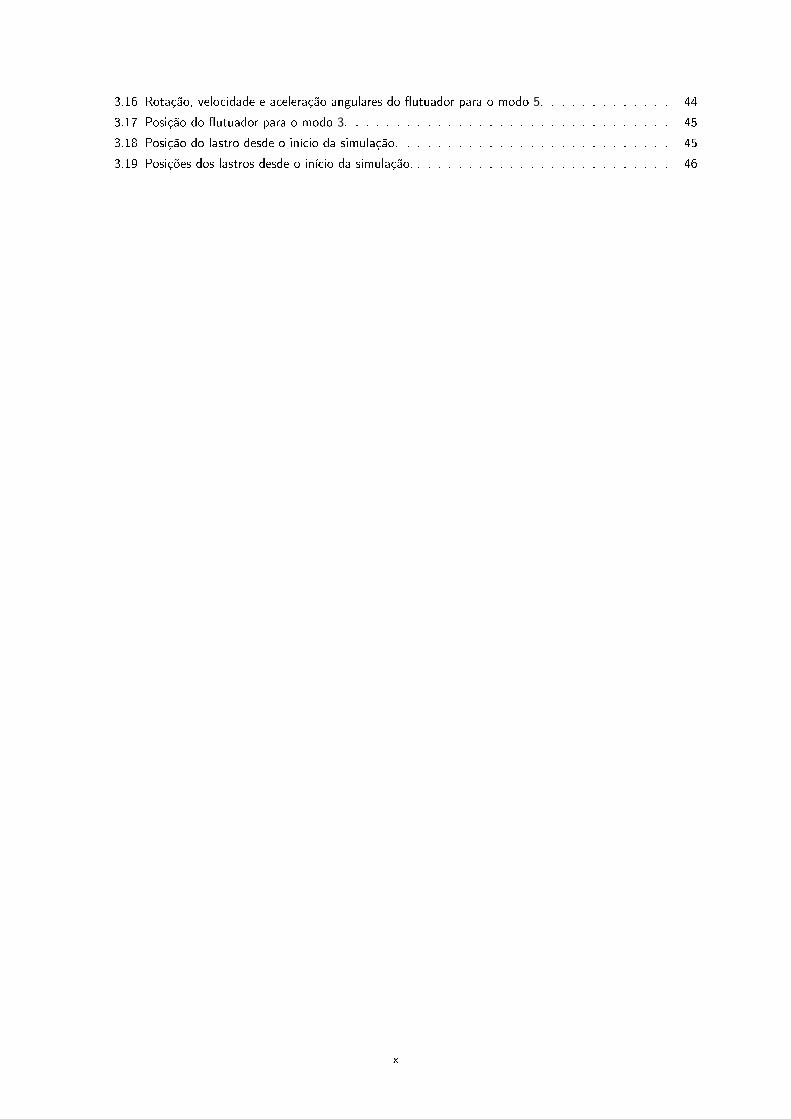
As �melhores� ondas encontram-se em zonas onde ventos fortes percorreram longas distâncias.
Assim, é de se prever que as melhores zonas de extracção de energia seja perto da costa, mas
não muito próximo, já que com a aproximação à linha costeira, a energia das ondas diminui,
devido à fricção com o fundo do mar, pelo que as ondas em águas mais profundas e mais
expostas têm mais energia (�gura 1.2).
Figura 1.2: Distribuição mundial do nível de energia das ondas, para valores médios anuais em kW/m e em
águas profundas [1].
A energia pode ser explorada de modo economicamente viável quando os níveis são superiores
a 15-20 kW/m (a medida comum para os níveis de energia das ondas é a média anual de
energia por metro de largura de crista de onda paralela à linha costeira) [1]. A energia de um
estado de mar real é medida a partir de propriedades estatísticas das ondas, nomeadamente
a sua altura e período. O parâmetro comum para representar a altura de onda de um estado
de mar real e irregular é a altura signi�cativa, Hs , cujo valor é uma média de 1/3 das maiores
alturas de onda, medidas ao longo de um certo intervalo de tempo [3].
Uma vez que, de um modo geral, os dispositivos de energia das ondas trabalham com o
efeito de ressonância em resposta ao período da onda, os padrões de ondas mais regulares (i.e.
repetidos períodos idênticos durante um longo intervalo de tempo) signi�cam melhor conversão
da energia das ondas do que com estados de mar irregulares. Esses estados irregulares podem
ser caracterizados por uma sobreposição de ondas regulares, com diferentes amplitudes e
frequências (ou períodos), e constituem uma das muitas di�culdades existentes na projecção
e consolidação de métodos de extracção de energia das ondas [1].
3

1.3 Problemas inerentes à extracção da energia das ondas
A investigação intensiva sobre a energia das ondas começou na década de 70 do século passado,
quando a primeira crise do petróleo despertou um interesse crescente nas energias renováveis.
Durante este período, foram desenvolvidos e apresentados vários dispositivos de energia das
ondas, mas, de um modo geral, o sucesso esteve aquém das expectativas. Em muitos casos foi
bastante subestimado o poder destrutivo das ondas oceânicas, e os dispositivos de conversão
de energia das ondas, pouco preparados, nem sempre mostraram resultados satisfatórios. Em
consequência, no �m dessa mesma crise energética, o interesse na energia das ondas diminuiu
e, no início da década de 1980, assistiu-se à interrupção de muitos ensaios [3].
A evolução das tecnologias permaneceu lenta até ao início do século XXI, em que foi dado um
novo impulso às energias renováveis na sequência da procura, em toda a Europa, do aumento
da produção a partir dessas mesmas fontes energéticas. Um dos principais factores para essa
renovação de con�ança na energia das ondas foi certamente o sucesso do sector da energia
eólica. Assim, foram desenvolvidas diferentes tecnologias para aplicação na linha costeira (ver
secção 1.5), junto à costa ou ao largo, sendo estas últimas o foco de muitos dispositivos em
teste, devido aos níveis mais elevados de energia em águas mais profundas ao largo [3].
Para além da falta de credibilidade, na sequência de fracassos, a principal razão para a escassez
de investimentos na área das energia das ondas é o elevado custo de capital necessário ao seu
desenvolvimento, especialmente na fase inicial da tecnologia.
Devido ao grande leque de opções existentes no que se refere aos meios de extracção, sendo que
nenhum até agora apresentou resultados expressivos, podemos concluir que outra di�culdade
inerente é a não convergência para uma única tecnologia, o que nesta fase de desenvolvimento
seria bené�co, já que concentraria os esforços num único projecto (ou num número limitado
de projectos).
O facto de os dispositivos não terem sido bem sucedidos há mais tempo pode ser explicado
também pela falta de envolvimento signi�cativo da indústria. Na ausência de perspectivas de
mercado e de visão su�ciente por parte dos intervenientes relevantes da indústria, os projectos
de energia das ondas têm estado muito dependentes de �nanciamento público. O resultado foi
um desenvolvimento fortemente académico, de um modo geral não sujeito à selecção natural
das soluções e dos recursos com mais sucesso. O passado demonstrou que o �nanciamento
público não é a forma mais e�ciente, mas geralmente é o único meio de levar um conceito a
testes de maior escala. Contudo, nos projectos de �nanciamento público, é frequente a falta de
�exibilidade no que diz respeito a prazos, metas e produtos, o que torna tudo mais complicado,
pois na fase inicial de um sector tão imprevisível e custo-intensivo, a �exibilidade é essencial.
Assim, não foi considerada surpresa quando duas abordagens completamente suportadas pelo
4

sector privado atingiram um certo grau de sucesso experimental, após décadas de I&D com
�nanciamento público - Pelamis Wave Power (ver secção 1.5.1) e o AWS Ocean Energy.
1.4 Impacto ambiental
Como todos os sistemas de extracção de energia, o aproveitamento da energia das ondas traz,
ou pode trazer, consequências para o ambiente. Logicamente, tratando-se de uma fonte de
energia renovável, o impacto ambiental será bastante limitado. A interacção mais problemática
poderá vir a ser a utilização do espaço do oceano, o que pode competir com actividades de
pesca e de navegação. A interacção visual pode ser signi�cativa para os dispositivos na linha
costeira e perto da costa, todavia, espera-se que estes tipos de dispositivos tenham apenas
um contributo marginal na exploração deste recurso.
Um argumento potencialmente forte para as sinergias entre a energia das ondas e as pescas
é que a criação de reservas será um efeito secundário de grandes parques de energia das
ondas, que, em geral, estarão fechados ao tráfego marítimo numa área de vários quilómetros
quadrados. Podemos prever então que a criação de parques de ondas terá que ter em atenção
as rotas marítimas [3].
1.5 Meios de extracção de energia
Os dispositivos de ondas podem ser categorizados de acordo com critérios como a localização
e a profundidade para as quais estão desenhados (na linha costeira, perto da costa, ou ao
largo) ou os métodos que são utilizados para captar essa mesma energia.
1.5.1 Atenuador
O Atenuador (Attenuator) é um dispositivo �utuante longo que é alinhado perpendicularmente
em relação à frente da onda. O dispositivo �utua efectivamente sobre as ondas e capta a
energia quando as ondas o atravessam, devido ao movimento progressivo que estas provocam
ao longo do seu comprimento. Um exemplo de um atenuador é o dispositivo Pelamis [3].
Este dispositivo foi desenvolvido por uma empresa Escocesa denominada �Pelamis Wave
Power�, e consiste num atenuador semi-submerso de secções cilíndricas ligadas entre elas por
juntas articuladas. Essa geometria especí�ca permite diminuir a acção de forças hidrodinâmi-
cas, o que por sua vez diminui a intensidade das forças exercidas no dispositivo. A produção
5

de energia é obtida através do movimento relativo das secções umas com as outras (Figuras
1.3 e 1.4), sendo depois transmitida por cabos a um outro dispositivo de armazenamento de
energia situado no fundo do mar [1].
Figura 1.3: Imagem do Pelamis no mar [1]. Figura 1.4: Imagem do Pelamis em terra [2].
Em 2008 criou-se a primeira central de ondas do mundo com múltiplos dispositivos capazes
de produzir energia, na Póvoa de Varzim. Esta central de ondas consistia em três unidades de
dispositivos Pelamis, com uma capacidade máxima conjunta de produção de energia de apro-
ximadamente 2.25 MW. Porém, devido a problemas �nanceiros, o funcionamento da central
foi suspenso apenas 2 meses após o seu início [10].
1.5.2 Sistema Oscilante de Simetria Axial
O chamado Pequeno Sistema Oscilante de Simetria Axial (Axisymmetrical Point Absorber) é
uma estrutura �utuante que absorve a energia das ondas em todas as direcções por força dos
movimentos das ondas na superfície da água ou perto dela (Figura 1.5). A característica de
absorção pontual (point absorbing) dá à estrutura a capacidade para absorver energia de uma
área de mar superior às suas dimensões. Regra geral, mas não necessariamente, estas bóias
são de simetria axial. Exemplos comuns desta categoria são o Wavebob, o OPT PowerBuoy
e o Aquabuoy. Um exemplo de pequeno sistema oscilante de simetria não axial, contudo com
características muito semelhantes, é o SeaREV [3].
Figura 1.5: Exemplo de um pequeno sistema oscilante [3].
6

1.5.3 Conversores Oscilantes de Translação de Ondas
Os Conversores Oscilantes de Translação das Ondas (Oscillating Wave Surge Converters -
OWSC) são colectores instalados perto da superfície e montados sobre um braço colocado
sobre um eixo perto do fundo do mar. O braço oscila como um pêndulo invertido, devido ao
movimento das partículas da água nas ondas (Figura 1.6). Exemplos comuns desta categoria
são o Waveroller, completamente submerso, e o Oyster, parcialmente submerso [3].
Figura 1.6: Exemplo de um conversor oscilante de translação das ondas [3].
1.5.4 Coluna de Água Oscilante
A Coluna de Água Oscilante (CAO) (Oscillating Water Column - OWC) é uma estrutura
parcialmente submersa, oca, com abertura para o mar abaixo da superfície da água, de forma
a que o ar contido no seu interior seja comprimido pela coluna de água. As ondas provocam
a subida e descida da coluna e funcionam como um pistão, comprimindo e descomprimindo o
ar (Figura 1.7). Este ar é conduzido através de uma turbina de ar para produzir energia. Um
caso especí�co desta categoria é a bóia CAO, que é uma CAO �utuante. Entre as propostas
actuais estão o Sperboy, o MRC e o OE Buoy. As CAO comuns são construídas directamente
na linha costeira ou integradas em quebra-mares [3].
Um exemplo concreto é a Central de Ondas do Pico, que consiste numa estrutura experimental
de produção de energia eléctrica situado na ilha do Pico, Açores (Figura 1.8). Esta Central
de ondas foi a primeira a utilizar a tecnologia da coluna de água oscilante associada a uma
turbina Wells e que está directamente ligada à rede eléctrica.
Este projecto entrou em funcionamento em 1999 com uma potência de 400 kW, mas o fun-
cionamento da central, de carácter experimental, foi di�cultado pela forte ondulação no local
e pela natural inexperiência na construção do equipamento. A central teve largos períodos de
inactividade devido a di�culdades de manutenção, encontrando-se em risco de encerramento
de�nitivo [11].
7

Figura 1.7: Visualização de uma estrutura OWC [4]. Figura 1.8: Imagem da Central do Pico [1].
1.5.5 Dispositivo de Galgamento
O Dispositivo de Galgamento (Overtopping Device) consiste numa rampa que é galgada pelas
ondas e num reservatório de armazenamento que recolhe a água das ondas (Figura 1.9). As
ondas que entram no reservatório criam uma altura de água que é devolvida ao mar através
de turbinas convencionais de baixa queda, instaladas no fundo do reservatório. Os dispositivos
podem ser �utuantes, como o Wave Dragon, ou �xos, estruturas em terra, como o SSG (Sea
Wave Slot Cone Generator), integrado num quebra-mar [3].
Figura 1.9: Exemplo de um dispositivo de galgamento [3].
1.5.6 Dispositivo Submerso de Diferença de Pressão
O Dispositivo Submerso de Diferença de Pressão (Submerged Pressure Di�erential) é um
dispositivo submerso, normalmente instalado perto da costa e apoiado no fundo do mar. O
movimento das ondas provoca a subida e descida do nível da água acima do dispositivo,
induzindo uma diferença de pressão que provoca a subida e descida do dispositivo juntamente
com as ondas (Figura 1.10). Um exemplo bem conhecido da realização deste conceito, até à
data, é o AWS (Archimedes Wave Swing) [3].
A lista acima apresentada foi feita com o objectivo de distinguir os conceitos que, neste
8

Figura 1.10: Exemplo de um dispositivo submerso de diferença de pressão [3].
momento, são mais conhecidos, com base no seu princípio operacional. Como podemos ver,
existem várias categorias de dispositivos de energia das ondas caracterizadas pelos mecanismos
de captura de energia, mas em regra geral são consideradas apenas três categorias fundamen-
talmente diferentes: a CAO, o dispositivo de galgamento e os corpos com movimento (relativo)
induzido pela onda. Tipicamente, todos os dispositivos, à excepção dos de galgamento, têm
características de absorção pontual [3].
1.6 Novo dispositivo de aproveitamento de energia das ondas
Os dispositivos oscilantes podem apresentar diferentes morfologias. Como referido anterior-
mente, o princípio de funcionamento baseia-se no movimento relativo entre um corpo �utuante
(cuja dimensão característica é muito inferior ao comprimento de onda) e uma referência, que
pode ser um corpo submerso (lastro) ou mesmo o fundo do mar.
O fundo do mar apresenta diversas di�culdades e restrições à rentabilidade destes dispositivos,
uma vez que é muito dispendioso realizar estruturas capazes de suportar elevadas compressões.
Portanto, para tornar o dispositivo economicamente viável, é importante que todos os elemen-
tos estruturais que constituem o sistema �utuante trabalhem sobretudo à tracção. Assim, ao
se reduzir de uma forma signi�cativa os custos relativos à construção e manutenção de todo
o equipamento, tornamos a relação custo de produção/energia extraída muito mais vantajosa
a nível económico.
A solução apresentada na patente [7] foi a de substituir a inércia do fundo do mar pela a de
um corpo submerso, ligado ao �utuador através de cabos, e assim teremos uma referência que
sofrerá muito menos a acção do ambiente marinho.
O processo de obtenção de energia consiste no seguinte: toda vez que o �utuador estiver no
seu movimento ascendente, o lastro acompanhará esse movimento, deslocando-se para cima.
No auge da posição vertical do �utuador, será accionado um travão (existente no interior
9

do �utuador) que impedirá o movimento relativo entre o �utuador e o lastro, aquando dos
seus movimentos descendentes, e apenas nestes movimentos. Assim, a distância que separa
o lastro do �utuador vai-se reduzindo, e os cabos de ligação entre os dois corpos mantêm-se
�enrolados� dentro do �utuador. Num determinado momento, quando a distância entre o
�utuador e o lastro é su�cientemente curta, o travão deixa de actuar, libertando os cabos. O
desenrolar dos cabos irá permitir o funcionamento de um gerador eléctrico existente no interior
do �utuador, que produzirá energia eléctrica. Essa energia será transportada directamente para
terra, através de cabos submarinos.
O �utuador estará ligado ao lastro submerso por um cabo aproximadamente rígido (�-
gura 1.11). Será de prever que o lastro actuará como um constrangimento ao movimento
do �utuador.
A geometria do �utuador em estudo consiste num cilindro, ao qual está acoplada uma semi-
esfera na parte inferior, com o mesmo diâmetro (�gura 1.12).
Figura 1.11: Sistema oscilante [5]. Figura 1.12: Modelo do �utuador.
O corpo �utuante comporta-se como um oscilador forçado, pelo o que se tenta obter vantagem
dos fenómenos de ressonância, ajustando a frequência de oscilação natural do sistema aos
estados do mar. Também é possível melhorar o rendimento do sistema com técnicas de
controlo especí�cas e ajustando a extracção de energia a cada estado do mar [12].
As dimensões do �utuador serão parâmetros do sistema, bem como a frequência e a amplitude
das ondas incidentes.
1.7 Objectivos e estrutura da dissertação
O tema desta dissertação incide sobre o estudo numérico de um sistema �utuante de apro-
veitamento de energia das ondas apresentado na patente [7], no domínio do tempo. Para tal,
10

foi desenvolvido, em linguagem de programação C++, um programa que simula o desempe-
nho desse mesmo sistema, sob diversas condições/situações, internas e externas (ao sistema).
O objectivo do programa, e consequentemente deste trabalho, será estudar os movimentos
adquiridos pelo �utuador quando excitado pelas ondas do mar. Pretende-se assim obter um
maior conhecimento sobre o comportamento do sistema em situações distintas, num ambiente
o mais próximo possível da realidade.
Esta dissertação encontra-se dividida em quatro capítulos:
• neste capítulo introdutório, são apresentados os objectivos do trabalho, bem como uma
pequena leitura sobre o petróleo e a sua importância no desenvolvimento de novas técnicas
de extracção/obtenção de energia. É feito também uma pequena descrição da tecnologia
da energia das ondas, a sua �origem� e desenvolvimento. Além disso, são mencionados
alguns exemplos concretos;
• no segundo capítulo, é apresentado um modelo simpli�cado de um dispositivo de con-
versão de energia das ondas, a sua geometria e características principais. De seguida
é descrita toda a formulação matemática usada para a construção do programa de si-
mulação numérica do dispositivo, bem como a solução analítica em regime permanente,
necessária para veri�car os resultados;
• no terceiro capítulo, é feita a análise e discussão de resultados obtidos pela simulação
numérica;
• no quarto e último capítulo, apresentam-se as conclusões do trabalho.
11

12

Capítulo 2
Formulação Matemática
2.1 Teoria linear das ondas
De acordo com a teoria linear das ondas de superfície, quando o corpo está sintonizado com a
onda incidente, mas sem estar em ressonância, as suas respostas às essas mesmas ondas terão
a mesma ordem de grandeza da amplitude da onda incidente. Assim, se as ondas incidentes
forem sinusoidais, a resposta do corpo às ondas também será sinusoidal [6].
De um modo geral, e associando um sistema de coordenadas �xo ao corpo e com origem no
seu centro de massa, este terá seis graus de liberdade (três translações e três rotações). Neste
estudo iremos desprezar três delas, pois pouco ou nada in�uenciam no resultado �nal, devido à
simetria axial do sistema e também devido às características da onda incidente. Assim, iremos
estudar o movimento do �utuador em ξ1 (Avanço-Recuo), em ξ3 (Arfagem) e �nalmente em
ξ5 (Cabeceio) [13], como podemos ver na �gura 2.1.
Figura 2.1: Graus de Liberdade de um corpo rígido [6].
Esta teoria também a�rma que o potencial de velocidade associado a um corpo �utuante
(quando excitado por uma onda progressiva regular) pode ser expresso como uma soma de
13

quatro parcelas independentes [14]. A primeira corresponde ao deslocamento do corpo na
ausência de ondas, ou seja, ao deslocamento do corpo associado à sua impulsão hidrostática.
A segunda parcela corresponde ao distúrbio na onda provocado pelo corpo na sua posição de
equilíbrio estático (força de inércia), e a terceira corresponde ao potencial da onda incidente
na ausência do corpo, normalmente chamada de força de excitação ou difracção. A quarta
e última parte relaciona-se com as ondas radiadas pelo movimento do corpo. Resumindo, o
potencial de velocidade associado a um corpo �utuante será a conjugação de quatro parcelas:
• Força de impulsão: Fimp.
• Força de inércia do corpo: Fine.
• Força de difracção ou excitação: Fd.
• Força de radiação: Fr.
A força de difracção também é normalmente chamada de excitação pois é ela que na maioria
dos casos excita o corpo. É através desta força que o corpo �utuante entra em movimento.
Assim, no caso em estudo, podemos escrever que a força de difracção equilibra a resultante
das restantes forças exercidas no corpo �utuante, ou seja
Fd = Fimp + Fine + Fr. (2.1)
Como sabemos, o �utuador estará preso a um lastro, e ligado a este por um cabo. Assim
teremos uma força adicional no nosso sistema, denominada Fc, que é exactamente a força
que o cabo exercerá no �utuador. Para este problema, assumiremos que a força do cabo será
apenas vertical. Sendo vertical e descentrada em relação ao centro de massa do �utuador,
esta força in�uenciará directamente apenas os modos 3 e 5. Como esta força se opõe ao
movimento do �utuador, teremos
Fd − Fc = Fimp + Fine + Fr. (2.2)
A força exercida pela cabo (Fc) constitui o par acção-reacção do somatório de forças exercidas
no lastro. Por isso, a equação de Fc também faz parte da equação dinâmica do lastro [14]
Fc = FineL + FgravL − FimpL, (2.3)
onde todos os termos do segundo membro da equação acima descrita se referem ao lastro.
Como explicado anteriormente, a força do cabo só existe quando o lastro subir juntamente
com o �utuador. Nas situações em que o �utuador estiver no seu movimento descendente, o
lastro não exercerá nenhuma força no cabo.
14

2.2 Equações de movimento de um corpo �utuante
2.2.1 Força de impulsão
Esta contribuição representa a alteração do estado de equilíbrio do corpo �utuante na sua
componente vertical. Assim, podemos prever que esta força apenas in�uenciará os modos ξ3
e ξ5. Sendo este último modo uma rotação, as expressões serão diferentes e estarão de�nidas
como
Fimp,3 = ρgAFξ3, (2.4)
onde ρ refere-se à densidade da água, g à aceleração gravítica, AF à área de secção do �utuador
ao nível do mar e ξ3 ao deslocamento correspondente ao modo 3.
Para o modo 5, a equação terá a seguinte forma
Fimp,5 = ρgW55ξ5, (2.5)
onde W55 corresponde ao momento de inércia da área que sofre alteração aquando do movi-
mento de rotação do �utuador (�gura 2.2).
Figura 2.2: W55 corresponde à área azul.
A expressão para o cálculo do W55 é a seguinte
W55 =
∫ 2π
0
∫ R
0
x5x5r drdα, (2.6)
com x5 = r sinα.
15

2.2.2 Força de inércia do corpo
A oscilação de qualquer corpo está necessariamente associada a forças inerciais. Por isso,
todas as equações dos três modos terão esta componente, de�nida da seguinte maneira
Fine,i =6∑
j=1
Mij ξj , i , j = 1, 2, ... 6. (2.7)
É de notar que, embora i e j possam variar de 1 até 6, eles na verdade só podem tomar
os valores 1, 3 e 5, umas vez que o estudo dos outros modos foi desprezado. A matriz de
inércia Mij está associada à massa do corpo �utuante [15] e aos momentos e produtos de
inércia Iij em relação ao seu centro de massa. Além disso, ξj representa a segunda derivada
do deslocamento em relação ao modo j (aceleração). Para além da massa do corpo, temos
que ter também em conta o efeito da massa adicionada, que não é mais do que a diferença
entre a energia cinética e energia potencial associado ao campo de ondas radiado, aquando
do movimento do corpo �utuante. O coe�ciente da massa adicionada será introduzido na
equação geral do movimento.
A matriz de inércia Mij terá as seguintes entradas1
Mij =
mF 0 0 0 0 0
0 0 0 0 0 0
0 0 mF 0 0 0
0 0 0 0 0 0
0 0 0 0 I Fyy 0
0 0 0 0 0 0
(2.8)
onde I Fyy , R e mF correspondem ao momento de inércia em relação ao eixo yy , ao raio da
secção do �utuador e à massa do �utuador, respectivamente. O valor de I Fyy é dado pela
equação
I Fyy =8
15mFR
2. (2.9)
2.2.3 Força de radiação
Numa modelação no domínio do tempo, a componente da força de radiação é por vezes
chamada de termo �memória�, pois nela está incluído o efeito de ondas anteriores ao início do
nosso estudo. Esta componente será calculada através de um integral de convolução, no qual1As razões da matriz conter muitos zeros é devido à simetria do �utuador e também à escolha do centro de massa do �utuador
como origem do referencial apresentado no início deste capítulo.
16

o núcleo é a função de resposta a impulso Kij , cujas características dependem da geometria
do corpo e da frequência da oscilação. O integral será calculado em intervalos de tempo, onde
σ representa uma variável de integração [15],
Fr,i(t) =
∫ t
−∞Kij(t − σ)ξi(σ) dσ, i , j = 1, 3 e 5. (2.10)
A função de resposta à impulso Kij é calculada através da fórmula2
Kij(t) =2
π
∫ ∞0
Bij(ω) cos(ωt)dω. (2.11)
onde Bij(ω) representa o coe�ciente de amortecimento por radiação.
2.2.4 Força de difracção ou excitação
Esta força é exercida pela onda incidente e é proporcional à amplitude da mesma. Decom-
pondo a onda incidente num conjunto de n componentes de amplitude Ai , frequência angular
ωi e desfasagem φi , a força de difracção é dada por [8]
Fd(t) =n∑
i=1
Γ(ωi)Ai cos(ωi t + φi), (2.12)
onde Γ(ωi) é o coe�ciente da força de excitação, que é um número real e positivo e variável
com a frequência.
O valor deste coe�ciente é calculado pelo WAMIT [13], juntamente com a fase φi(ω), que
representa o atraso da resposta do �utuador à força de excitação. Um valor de frequência
ωi representa uma determinada componente, que por sua vez apresenta um determinado
coe�ciente de força de excitação. Naturalmente, caso tenhamos que ter em conta o efeito de
várias ondas diferentes, teremos então um espectro de ondas irregulares, daí o aparecimento
do termo somatório na equação 2.12, onde n corresponde ao número de ondas usadas para
calcular a força de difracção.
2.2.5 Força do cabo
Pelas equações anteriores, podemos deduzir que
Fc(t) = mLξL + mLg′, (2.13)
onde mL e ξL representam a massa e a aceleração do lastro, respectivamente. Para além
disso, o termo mLg′ já inclui os efeitos da impulsão e da gravidade, e por isso g
′representa a
2Para mais detalhes consultar secção A.3.
17

aceleração gravítica equivalente, e vale
g ′ = g
(1− ρH2O
ρB
), (2.14)
onde ρB corresponde à densidade do lastro. Podemos também concluir que, se o cabo for
rígido, ξL = ξj (j refere-se aos modos 3 e 5).
2.2.6 Manipulações e simpli�cações
Conjugando as equações anteriores, 2.2 e de 2.4 a 2.13, �caremos com uma equação geral
de movimento, para qualquer dos três modos
Fd,i(t)− Fc(t) =i∑
j=1
{(Mij + a∞ij )ξj +
∫ t
−∞Kij(t − σ)ξj(σ) dσ + ρgUξj
}, (2.15)
onde i = 1, 2 . . . n corresponde aos graus de liberdade, que neste caso serão três de denomi-
nação não contínua, como referido anteriormente: ξ1, ξ3 e ξ5. O termo U na parcela ρgUξ
irá valer AF quando estivermos no modo 3, e irá valer W55 quando estivermos no modo 5.
Podemos observar também a inclusão do termo a∞ij , que representa o coe�ciente da massa
adicionada. É importante referir que a equação correspondente ao modo 5 é na verdade uma
equação de momentos, apesar da notação usada ser a mesma para os três modos. Tendo
a equação geral, e aplicando as condições especí�cas para cada modo, juntamente com as
simpli�cações inerentes [15], �caremos com
Para o Modo 1,
Fd,1(t) = (mF + a∞11)ξ1 +
∫ t
−∞K11(t − σ)ξ1(σ) dσ
+a∞15ξ5 +
∫ t
−∞K15(t − σ)ξ5(σ) dσ.
(2.16)
Para o Modo 3,
Fd,3(t)− Fc(t) = (mF + a∞33)ξ3 +
∫ t
−∞K33(t − σ)ξ3(σ) dσ + ρgAF ξ3. (2.17)
Para o Modo 5,
Fd,5(t)− bFc(t) = a∞51ξ1 +
∫ t
−∞K51(t − σ)ξ1(σ) dσ + (I Fyy + a∞55)ξ5
+
∫ t
−∞K55(t − σ)ξ5(σ) dσ + ρgW55ξ5,
(2.18)
18

onde b corresponde ao braço (distância) horizontal entre o cabo e o centro de massa do
�utuador (�gura 2.3).
Figura 2.3: Descentramento do cabo em relação ao centro de massa do �utuador [7].
As equações 2.16 a 2.18 podem ser reorganizadas de modo a termos as incógnitas apenas num
dos membros da equação (neste caso, será o lado esquerdo). Isto inclui também a expressão
da força do cabo Fc(t).
Assim, para o Modo 1,
(mF + a∞11)︸ ︷︷ ︸M11
ξ1 + a∞15︸︷︷︸M15
ξ5 = RHS1. (2.19)
Para reduzir o número de termos das equações, iremos substituir a soma dos termos de massa
existentes (a do �utuador, a da massa adicionada e a do lastro) por um único termo, como a
equação acima indica. A designação deste termo nada terá a ver com as entradas da matriz
de inércia associada ao �utuador. Além disso, representa-se por RHS1 todos os termos do
segundo membro
RHS1 = Fd,1 −∫ 0
−∞K11(t − σ)ξ1(σ) dσ −
∫ t
0
K11(t − σ)ξ1(σ) dσ
−∫ 0
−∞K15(t − σ)ξ5(σ) dσ −
∫ t
0
K15(t − σ)ξ5(σ) dσ.
(2.20)
É importante referir a decomposição aditiva feita nos integrais de convolução. Como foi
anteriormente descrito, o termo �memória� abrange não só o intervalo de tempo actual ([0, t]),
mas também os anteriores para os quais o valor de ξ(σ) é conhecido ([−∞, 0]). Assim,
dividimos cada integral em duas partes, uma cujo valor é conhecido e outra cujo valor depende
de velocidades ainda não conhecidas, e portanto exige iterações.
19
Para os outros modos, as simpli�cações e divisões serão semelhantes.
Para o Modo 3,
(mF + a∞33 + mL)︸ ︷︷ ︸M33
ξ3 + ρgAF︸ ︷︷ ︸C33
ξ3 = RHS3. (2.21)
RHS3 = Fd,3 −mLg′ −∫ 0
−∞K33(t − σ)ξ3(σ) dσ −
∫ t
0
K33(t − σ)ξ3(σ) dσ. (2.22)
Para o Modo 53,
a∞51︸︷︷︸M51
ξ1 + (I Fyy + a∞55 + mLb2)︸ ︷︷ ︸
M55
ξ5 + ρgW55︸ ︷︷ ︸C55
ξ5 = RHS5. (2.23)
RHS5 = Fd,5 + mLg′b −
∫ 0
−∞K51(t − σ)ξ1(σ) dσ −
∫ t
0
K51(t − σ)ξ1(σ) dσ
−∫ 0
−∞K55(t − σ)ξ5(σ) dσ −
∫ t
0
K55(t − σ)ξ5(σ) dσ.
(2.24)
É preciso referir que mL só será contabilizado quando o lastro estiver na sua fase ascendente,
caso contrário valerá 0 (ou seja, deixa de actuar). Para além disso, como os valores de a∞15
e a∞51 são muito parecidos (a diferença está na ordem de 10−6), devido à matriz de massas
adicionais ser simétrica, podemos considerar que a∞15 = a∞51 e consequentemente M15 = M51.
E assim o sistema de equações poderá ser escrito numa forma condensada que destaca as
principais incógnitas
M11 ξ1 + M15 ξ5 = RHS1,
M33 ξ3 + C33 ξ3 = RHS3,
M15 ξ1 + M55 ξ5 + C55 ξ5 = RHS5.
(2.25)
2.3 Solução numérica das equações de movimento
O cálculo dos deslocamentos do �utuador será feito num referencial de tempo com origem no
início de cada intervalo de tempo τ (ou passo no tempo) [8]
τ = t − tn, (2.26)
onde t representa o tempo absoluto, e tn representa o tempo do início de cada intervalo
de tempo. Em cada passo no tempo, para resolver o nosso sistema de equações, iremos
3A força do cabo irá causar uma rotação em torno do centro de massa no valor de mLbξ5, daí o aparecimento do termo b2.
20
aproximar a posição do �utuador, ou seja, ξ, por um polinómio de grau n, de modo que as
incógnitas passam a ser os coe�cientes desse polinómio. Para uma dada componente (modo)
i do movimento
ξi = ξ0i + ξ0
i τ +n∑
j=2
a(i)p τ p, (2.27)
onde ξ0i e ξ0
i são valores conhecidos no instante inicial de cada intervalo de tempo, pois são
a posição e a velocidade no último instante do intervalo de tempo anterior, excepto no início
da simulação, onde esses mesmos são impostos como condições iniciais. De 2.27, teremos a
expressão da velocidade do �utuador
ξi = ξ0i +
n∑p=2
p a(i)p τ p−1, (2.28)
e �nalmente a expressão da aceleração do �utuador
ξi =n∑
p=2
p (p − 1) a(i)p τ p−2, (2.29)
e portanto, a partir de agora, as nossas incógnitas serão os coe�cientes a(i)p , onde i representa o
modo e n a ordem do polinómio. Da mesma maneira que aproximamos os termos do primeiro
membro do nosso sistema de equações, iremos também aproximar os termos do segundo
membro desse mesmo sistema. Assim,
RHSi =n∑
p=0
b(i)p τ p, (2.30)
onde n representa a ordem do polinómio, e onde teremos apenas b(i)p como incógnitas.
Reorganizando o sistema de equações 2.25, �caremos com
21

M11
{n∑
p=2
p (p − 1) a(1)p τ p−2
︸ ︷︷ ︸ξ1
}+ M15
{n∑
j=2
p (p − 1) a(5)p τ p−2
︸ ︷︷ ︸ξ5
}=
{n∑
p=0
b(1)p τ p︸ ︷︷ ︸
RHS1
}
M33
{n∑
p=2
p (p − 1) a(3)p τ p−2
︸ ︷︷ ︸ξ3
}+ C33
{ξ0
3 + ξ03 τ +
n∑p=2
a(3)p τ p︸ ︷︷ ︸
ξ3
}=
{n∑
p=0
b(3)p τ p︸ ︷︷ ︸
RHS3
}
M15
{n∑
p=2
p (p − 1) a(1)p τ p−2
︸ ︷︷ ︸ξ1
}+ M55
{n∑
j=2
p (p − 1) a(5)p τ p−2
︸ ︷︷ ︸ξ5
}+
C55
{ξ0
5 + ξ05 τ +
n∑p=2
a(5)p τ p︸ ︷︷ ︸
ξ5
}=
{n∑
p=0
b(5)p τ p︸ ︷︷ ︸
RHS5
}
(2.31)
Para calcular os coe�cientes polinomiais a(i)p , iremos de�nir um resíduo para cada modo e
depois minimizá-los, de acordo com o método dos mínimos quadrados [16]. Assim, iremos
de�nir as seguintes igualdades
g1p(τ) = p (p − 1) τ p−2,
g2p(τ) = M11 g1p(τ),
g3p(τ) = M15 g1p(τ),
g4p(τ) = M33 g1p(τ) + C33 τp,
g5p(τ) = M55 g1p(τ) + C55 τp.
(2.32)
com p = 2, ... , n, onde n corresponde ao grau do polinómio de interpolação. Poderemos
então reestruturar o sistema de equações 2.31, para que possamos obter resultados através do
método acima referido.
Para o modo 1n∑
p=2
{g2p(τ) a(1)
p + g3p(τ) a(5)p
}− h1(τ) = 0, (2.33)
com h1(τ) =∑n
p=0 b(1)p τ p.
22

Para o modo 3n∑
p=2
{g4p(τ) a(3)
p
}− h3(τ) = 0, (2.34)
com h3(τ) =∑n
p=0 b(3)p τ p − C33 (ξ0
3 + ξ03 τ).
Para o modo 5n∑
p=2
{g3p(τ) a(1)
p + g5p(τ) a(5)p
}− h5(τ) = 0, (2.35)
com h5(τ) =∑n
p=0 b(5)p τ p − C55 (ξ0
5 + ξ05 τ).
Visto que as equações 2.33 e 2.35 contêm ambos os termos a(1)p e a
(5)p , elas terão que ser
resolvidas em simultâneo, ao passo que a equação 2.34 será resolvida directamente, pois
contém apenas a(3)p . Pelo método dos mínimos quadrados, de�nimos o resíduo para os modos
1 e 5 como sendoτ∫
0
[r 21 (τ) + r 2
5 (τ)]
dτ , (2.36)
e o resíduo para o modo 3 como sendo
τ∫0
r 23 (τ)dτ , (2.37)
onde os resíduos das equações 2.33 a 2.35 são
r1(τ) =n∑
p=2
(g2p a(1)
p + g3p a(5)p
)− h1,
r3(τ) =n∑
p=2
(g4p a(3)
p
)− h3,
r5(τ) =n∑
p=2
(g3p a(1)
p + g5p a(5)p
)− h5.
(2.38)
Ao derivarmos os quadrados dos resíduos em ordem a a(1)p , a(3)
p e a(5)p , respectivamente, teremos
∂
∂a(1)p
τ∫0
(r 21 + r 2
5
)dτ = 2
τ∫0
(r1g2p + r5g3p) dτ ,
∂
∂a(3)p
τ∫0
(r 23
)dτ = 2
τ∫0
r3g4pdτ ,
∂
∂a(5)p
τ∫0
(r 21 + r 2
5
)dτ = 2
τ∫0
(r1g3p + r5g5p) dτ ,
(2.39)
23

com p = 2, ... , n, onde n corresponde ao grau do polinómio de interpolação. Os coe�cientes
a(1)p , a(3)
p e a(5)p serão os zeros do sistema 2.39 e assim, após algumas manipulações algébricas,
as equações 2.33 e 2.35 darão origem a
[ n∑p=2
∫ τ
0
(g2pg2i + g3pg3i) dτ
]a(1)p +
[ n∑p=2
∫ τ
0
(g3pg2i + g5pg3i) dτ
]a(5)p =
∫ τ
0
(h1g2p + h5g3p) dτ ,
[ n∑p=2
∫ τ
0
(g3pg2i + g5pg3i) dτ
]a(1)p +
[ n∑p=2
∫ τ
0
(g3pg3i + g5pg5i) dτ
]a(5)p =
∫ τ
0
(h5g5p + h1g3p) dτ ,
(2.40)
onde todos os integrais são avaliados analiticamente. Se este sistema de equações 2.40 for
posto sob a forma matricial, poderemos concluir que esta será simétrica e consequentemente
resolvida utilizando o método de decomposição de Cholesky LDLT [16]. Analogamente, a
equação 2.34 dará origem a
[ n∑p=2
∫ τ
0
(g4pg4i) dτ
]a(3)p =
∫ τ
0
(h3g4p) dτ . (2.41)
Resolvidas as equações 2.40 e 2.41, iremos substituir os valores de a(1)p , a(3)
p e a(5)p nas expressões
polinomias 2.27 a 2.29, e assim teremos o deslocamento, a velocidade e a aceleração do
�utuador para cada modo, apenas em função do tempo. É importante referir que, sendo o
modo 5 uma rotação, o deslocamento será dado em radianos e consequentemente a velocidade
e a aceleração serão angulares.
2.4 Integração numérica da força de radiação
Como foi descrito anteriormente, o integral de convolução (2.10) será dividido em duas partes,
uma cujos termos são conhecidos (de −∞ até 0) e outra cujos termos são desconhecidos (de
0 até t), e calculado em pontos τm igualmente espaçados de um intervalo τ [8]. O número
de pontos τm será igual a n + 1, onde n representa a ordem do polinómio interpolador a ser
usado (�gura 2.4)4.
4Foi utilizado neste exemplo um polinómio interpolador de 4a ordem para aproximar Fr(τ). A função Fr(τ) será portanto
calculada em cinco pontos τ0, ... , τ4, e dividido em duas partes: F+c (τm) e F−c (τm).
24

Figura 2.4: Exemplo dos limites de um integral de convolução [8].
Como explicitado anteriormente,
Fr(τm) = F+r (τm) + F−r (τm)
=
τm∫0
K (τm − σ) ξ(σ)dσ +
0∫−∞
K (τm − σ) ξ(σ)dσ.(2.42)
O primeiro integral de convolução será avaliado pela regra de Gauss-Legendre quadrática [16]
com h pontos
F+r (τm) =
τm∫0
K (τm − σ) ξ(σ)dσ =h−1∑g=0
K+m,g ξ(τmξg ), (2.43)
onde
K+m,g =
τm2
wg K (τm(1− ξg )) , (2.44)
ξg =1
2
(ξg + 1
), (2.45)
e também onde ξg ∈]− 1, +1[ e wg representam os pontos de integração e os pesos da regra
de Gauss-Legendre quadrática, respectivamente. Neste trabalho utilizaremos uma �spline�
cúbica para aproximar K (t), e, para podermos calcular uma integração exacta de F+r (τm),
precisaremos de
h = integer
(1
2n + 2
)(2.46)
pontos de integração de Gauss-Legendre [8]. A matriz K+m,g será calculada apenas uma vez. O
segundo integral de convolução será calculado antes do início da simulação do �utuador como
F−r (τm) =N−1∑l=0
∫Il
K (τm − σ) ξ(σ)dσ, (2.47)
onde Il = [ τl , τl+1 ] e τl = −(N − l)∆τ , e onde N é o número de intervalos de integração de
modo que K (N∆τ) < 10−7. Como pode ser visto na �gura 2.4, os limites dos integrais de
25

F−r (τm) têm todos o mesmo tamanho ao preenchermos de zeros as correspondentes entradas
da matriz do enésimo intervalo (ou seja, as barras brancas na �gura 2.4). Calculando F−r (τm)
através da regra de Gauss-Legendre quadrática, com p pontos em cada Il , teremos
F−r (τm) =hN−1∑q=0
K−m,q ξ(τ ∗q ), (2.48)
onde
K−m,q =∆τ
2wg∗ K (τm − τ ∗q ), (2.49)
τ ∗q = ∆τ [ ξg∗ + l∗ − N ] , (2.50)
g ∗ = remainder(q/h) and l∗ = integer(q/h). A matriz Km,q será calculada apenas uma vez.
2.5 Domínio da frequência - regime permanente
Como descrito na secção 2.1, uma das consequências do sistema ser linear é que, se as ondas
incidentes forem sinusoidais (ondas regulares), é também sinusoidal no tempo (com a mesma
frequência) a variação de todas as forças e a variação da coordenada ξ. Podemos assim utilizar
uma representação complexa para exprimir essa variação temporal [1]
ξi ,freq(t) = Re(Yieiωt), (2.51)
em que �Re� signi�ca parte real, ω é a frequência (frequência angular, em radianos por unidade
de tempo) e Yi é a amplitude de oscilação (em geral complexa) para o modo i . Para a
velocidade podemos escrever
ξi ,freq(t) = Re(iωYieiωt) = Re(Vie
iωt), (2.52)
sendo Vi = iωYi a amplitude complexa da velocidade.
Como se pode prever, as expressões para a obtenção dos valores de Y1, Y3 e Y5 não serão
iguais, já que, para além do comportamento do �utuador ser diferente para os três modos,
a determinação de Y1 estará directamente ligada a Y5, uma vez que as equações de movi-
mento desses dois modos são resolvidas em simultâneo. Por essa razão, Y3 será calculado
separadamente.
Para obter as expressões para Y3 [1], foi preciso recorrer à expressão 2.21, só que desta vez
mantemos as componentes da força de radiação no primeiro membro da equação, de maneira
26

que
(mF + a∞33)ξ3 + ρgAFξ3 +
∫ 0
−∞K33(t − σ)ξ3(σ) dσ
+
∫ t
0
K33(t − σ)ξ3(σ) dσ = Fd,3.
(2.53)
A equações acima descrita (2.53) encontra-se naturalmente no domínio do tempo. Ao pas-
sarmos para o domínio da frequência, o a∞ será substituído por a(ω), os integrais de radiação
serão substituídos por B(ω) e �nalmente as variáveis de posição, velocidade e aceleração5
serão substituídos pelas expressões 2.51 e 2.52.
Assim, e através de manipulações algébricas, os valores de Y3 serão determinados pela
seguinte expressão6
Y3 =Fd,3
−ω2(mF + a33(ω)
)+ iωB33(ω) + ρgAF
. (2.54)
e consequentemente
V3 =Fd,3
−ω2(mF + a33(ω)
)+ iωB33(ω) + ρgAF
iω. (2.55)
onde os coe�cientes a(ω) e B(ω) dependem da geometria do sistema e da frequência ω.
Para obter as expressões para Y1 e Y5, foi preciso recorrer às expressões 2.19 e 2.23, e, de
uma maneira semelhante ao modo 3,
(mF + a∞11)ξ1 + a∞15ξ5 +
∫ 0
−∞K11(t − σ)ξ1(σ) dσ +
∫ t
0
K11(t − σ)ξ1(σ) dσ
+
∫ 0
−∞K15(t − σ)ξ5(σ) dσ +
∫ t
0
K15(t − σ)ξ5(σ) dσ = Fd,1,
(2.56)
e
a∞51ξ1 + (I Fyy + a∞55)ξ5 + ρgW55ξ5 +
∫ 0
−∞K51(t − σ)ξ1(σ) dσ +
∫ t
0
K51(t − σ)ξ1(σ) dσ
+
∫ 0
−∞K55(t − σ)ξ5(σ) dσ +
∫ t
0
K55(t − σ)ξ5(σ) dσ = Fd,5.
(2.57)
As equações acima (2.56 e 2.57) encontram-se no domínio do tempo e assim, ao passarmos
para o domínio da frequência, os a∞ serão substituídos por a(ω), os integrais de radiação serão5A amplitude complexa da aceleração será igual a iωVi .6Para mais detalhes ver secção B.2.
27

substituídos por B(ω) e as variáveis de posição, velocidade e aceleração serão substituídos
pelas expressões 2.51 e 2.52. Após algumas manipulações algébricas7, obteve-se então as
expressões para a amplitude de Y1
Y1 = ReDFd,1 − BFd,5
AD − BC, (2.58)
e para a amplitude de Y5
Y5 = Re−CFd,1 + AFd,5
AD − BC, (2.59)
onde A, B , C e D representam
A = −ω2(mF + a11(ω)
)+ iωB11(ω),
B = −ω2a15(ω) + iωB15(ω),
C = −ω2a51(ω) + iωB51(ω),
D = −ω2(I Fyy + a55(ω)
)+ iωB55(ω) + ρgW55.
(2.60)
Se os cálculos estiverem correctos, os valores de posição, velocidade e aceleração obtidos no
domínio do tempo deverão coincidir com os valores teóricos de ξi ,freq(t), ξi ,freq(t) e ξi ,freq(t),
respectivamente. Assim, é através desta análise que se prova que o programa de simulação
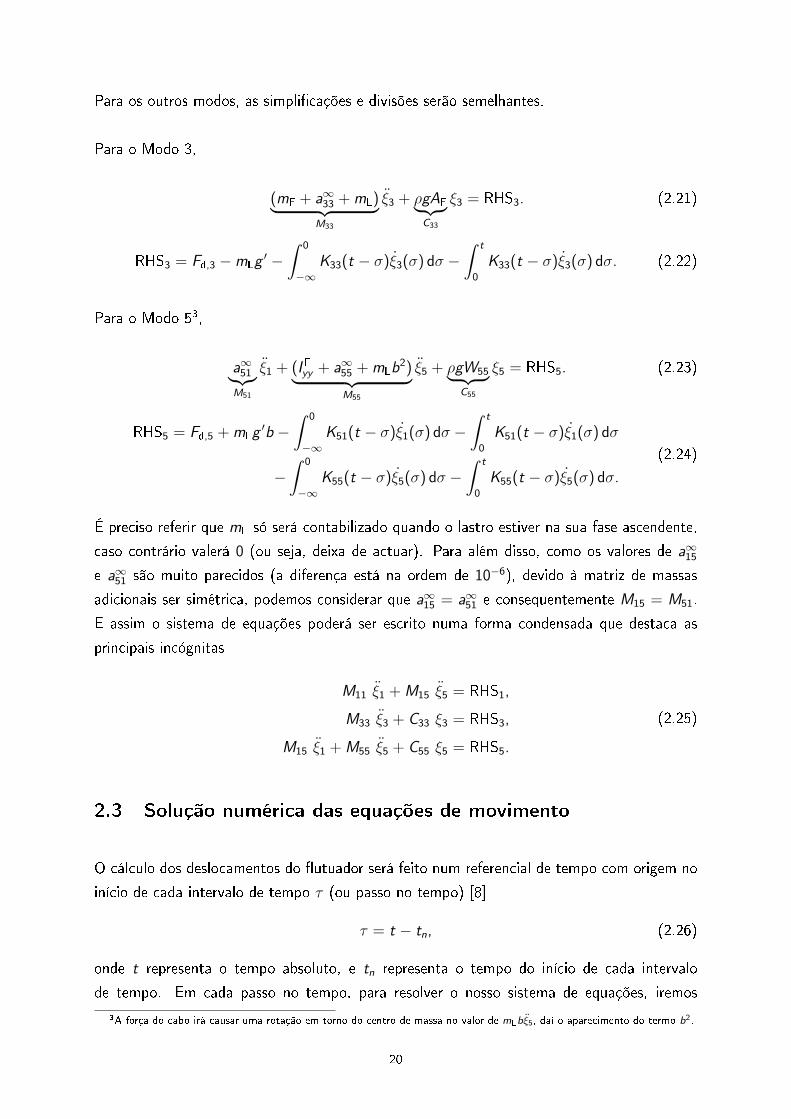
numérica de facto produz resultados consistentes.
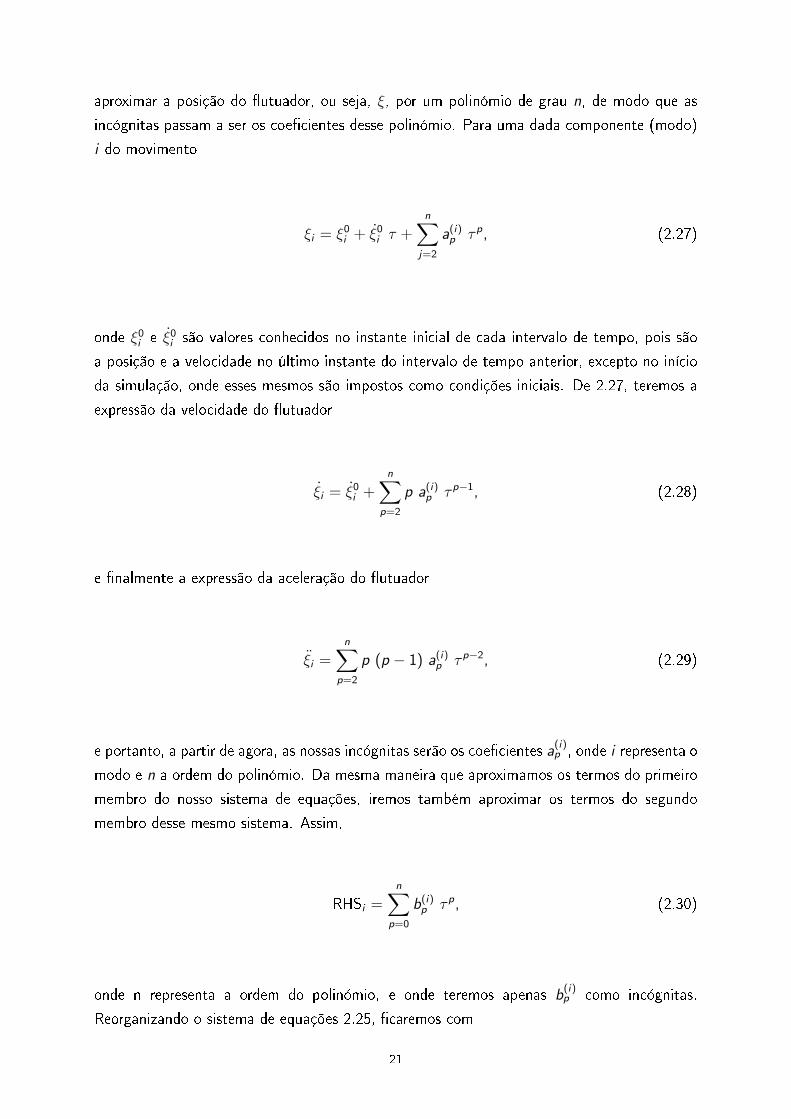
7Para mais detalhes consultar secção B.1.
28

Capítulo 3
Análise de Resultados
3.1 Comparação do domínio do tempo com a da frequência
Antes de começar a analisar resultados propriamente ditos, é preciso veri�car os resultados
obtidos através do programa de simulação numérica. Ou seja, é preciso certi�car-se que aquilo
que está a ser calculado no programa é consistente, daí a razão de se fazer uma comparação
entre o domínio do tempo (solução numérica) e o domínio da frequência (solução analítica
em regime permanente). Nesta comparação exclui-se também o lastro, uma vez que a sua
variação/utilização não é linear.
No entanto, os primeiros resultados obtidos pelo programa numérico mostraram que, para
o modo 1, os valores de posição (e consequentes derivadas) divergiam muito rapidamente
para valores disparatados (�gura 3.1). Para além disso, o modo 5 também ele acabou por
apresentar valores igualmentes sem sentido, como podemos ver na �gura 3.2, uma vez que
está acoplado ao modo 1 através dos termos de radiação.
Já a análise do modo 3 apresentou resultados consistentes. Para tentar perceber o porquê
do programa fornecer tais valores, decidiu-se também fazer uma análise de resultados sem as
componentes da radiação, e outra com essas mesmas componentes.
3.1.1 Cálculos sem as componentes de radiação
A ausência de componentes de radiação implicará que todos os valores de massa adicionada,
coe�cientes de amortecimento por radiação e funções de resposta a impulso serão iguais a 0.
29
0 10 20 30 40 50t (seg)
6
5
4
3
2
1
0
1
Y (
m);
Y (
m/s
); Y
(m
/s2)
Y1,num
Figura 3.1: Posição do �utuador para o modo 1 a divergir.
0 50 100 150 200 250 300 350t (seg)
10000
5000
0
5000
10000
Y (
m);
Y (
m/s
); Y
(m
/s2)
Y1,num
Y1,num
Y1,num
Y5,num
Y5,num
Y5,num
Figura 3.2: Coordenadas do �utuador para os modos 1 e 5 a divergirem.
30

Assim,
a∞ij = 0,
Bij = 0,
Kij = 0.
e as equações de movimento, para cada um dos modos, serão reduzidas a
mFξ1 = Fd,1,
mFξ3 + ρgAFξ3 = Fd,3,
I Fyy ξ5 + ρgW55ξ5 = Fd,5.
Como podemos ver, a equação de movimento para o modo 1 não contém nenhum termo de
restituição, ao contrário das equações para os modos 3 e 5. Os polinómios interpoladores
usados no cálculo da solução numérica introduzem uma certa diferença em relação ao movi-
mento exacto (domínio da frequência), e essas diferenças não se atenuam, acumulam-se por
ressonância, uma vez que na ausência de radiação, não há dissipação de energia. Para além
disso, se não houver nenhum termo de restituição, o �utuador �caria à deriva e iria se afastar
permanentemente da sua posição de equilíbrio.
Assim, para atenuar essas diferenças1, iremos introduzir na equação do modo 1 um termo
restitutivo, sob a forma de uma mola. Essa mola terá uma rigidez na ordem dos 50 N/m,
o su�ciente para estabilizar as diferenças entre o domínio do tempo e o da frequência. A
introdução da mola irá fazer surgir um desvio estável da posição média do �utuador, em vez
de haver um desvio crescente da mesma.
Nesta análise utilizou-se um polinómio interpolador de grau 8, com um período de onda de
8 s e uma altura de onda de 1 m. O raio do �utuador vale 6 m e o intervalo de tempo de
simulação foi de 1500 s com um passo de 0.1 s. O erro médio (ε) de posição, velocidade e
aceleração será determinado pela seguinte expressão
ε =
√1
∆t
∫ ∆t
0
erro2 dt, (3.1)
onde ∆t representa o intervalo de tempo de simulação e �erro� as diferenças existentes entre
os domínios para cada ponto,
erro = ξi(t)− ξi ,freq(t), (3.2)
onde ξi(t) corresponde às coordenadas obtidas através do programa numérico.
1diferenças essas que mesmo assim têm um valor muito reduzido, na ordem de 10−11, como iremos ver de seguida.
31

500 505 510 515 520t (seg)
6
4
2
0
2
4
6F
(N)
Fdif1/105
Figura 3.3: Força de excitação para o modo 1.
3.1.1.1 Modo 1
Como este estudo é efectuado com ondas regulares, a força de excitação simulará o efeito de
uma onda, sempre com a mesma amplitude e comprimento de onda (Figura 3.3).
Com a inclusão do termo de restituição, teremos para o modo 1 o seguinte grá�co onde as
amplitudes permanecem constantes ao longo do intervalo de tempo de simulação.
As curvas das posições, velocidades e acelerações para ambos os domínios encontram-se uma
em cima da outra, daí ter se omitido a representação das curvas no domínio da frequência.
Essa sobreposição pode comprovada pelos valores dos erros (�gura 3.4), evidenciando portanto
que os cálculos efectuados no domínio do tempo estão correctos. O erro médio ao longo do
intervalo de tempo de simulação terá os seguintes valores:
ε(ξ1) = 6.692× 10−11 m,
ε(ξ1) = 6.57× 10−11 m/s,
ε(ξ1) = 6.72× 10−11 m/s2.
3.1.1.2 Modo 3
De uma maneira semelhante ao modo 1, teremos a força de excitação sempre com a mesma
amplitude e comprimento de onda (�gura 3.5).
32

500 505 510 515 520t (seg)
0.8
0.6
0.4
0.2
0.0
0.2
0.4
0.6
0.8
Y (
m);
Y (
m/s
); Y
(m
/s2)
Y1,num
Y1,num
Y1,num
500 505 510 515 520t (seg)
0
1
2
3
4
5
6
Y (
m);
Y (
m/s
); Y
(m
/s2)
erro Y1 * 109
erro Y1 * 1011
erro Y1 * 1011
Figura 3.4: Posição, velocidade e aceleração do �utuador no domínio do tempo e seus erros, para o modo 1.
500 505 510 515 520t (seg)
3
2
1
0
1
2
3
F (N
)
Fdif3/105
Figura 3.5: Força de excitação para o modo 3.
33

500 505 510 515 520t (seg)
0.8
0.6
0.4
0.2
0.0
0.2
0.4
0.6
0.8Y (
m);
Y (
m/s
); Y
(m
/s2)
Y3,num
Y3,num
Y3,num
500 505 510 515 520t (seg)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
Y (
m);
Y (
m/s
); Y
(m
/s2)
erro Y3 * 1011
erro Y3 * 1011
erro Y3 * 1011
Figura 3.6: Posição, velocidade e aceleração do �utuador no domínio do tempo e seus erros, para o modo 3.
Uma vez mais, os resultados são muito idênticos para todo o intervalo de tempo de simulação,
o que implica erros com valores muito baixos (�gura 3.6) e consequentemente um erro médio
também bastante reduzido.
ε(ξ3) = 7.362× 10−11 m,
ε(ξ3) = 6.912× 10−11 m/s,
ε(ξ3) = 6.588× 10−11 m/s2,
As acelerações apresentam as maiores oscilações nas �guras 3.4 e 3.6 porque a sua solução é
descontínua no domínio do tempo. Assim, essas oscilações correspondem ao instante �nal de
um passo no tempo (e consequentemente ao instante inicial do próximo passo no tempo).
3.1.1.3 Modo 5
De maneira idêntica aos outros modos, teremos o momento2 de excitação também com am-
plitude e comprimento de onda constantes (�gura 3.7).
Uma vez mais, os resultados são muito idênticos para todo o intervalo de tempo de simulação,
o que implica erros com valores muito baixos (�gura 3.8) e consequentemente um erro médio
2Como referido no capítulo anterior, o modo 5 consiste numa rotação.
34

505 510 515 520t (seg)
2
1
0
1
2
F (N
)
Fdif5/106
Figura 3.7: Momento de excitação para o modo 5.
500 505 510 515 520t (seg)
0.20
0.15
0.10
0.05
0.00
0.05
0.10
0.15
0.20
Y (
m);
Y (
m/s
); Y
(m
/s2)
Y5,num
Y5,num
Y5,num
500 505 510 515 520t (seg)
0
2
4
6
8
10
12
14
Y (
m);
Y (
m/s
); Y
(m
/s2)
erro Y5 * 1012
erro Y5 * 109
erro Y5 * 106
Figura 3.8: Rotação, velocidade e aceleração angulares do �utuador no domínio do tempo e seus erros, para
o modo 5.
35
também bastante reduzido.
ε(ξ5) = 2.793× 10−11 rad,
ε(ξ5) = 1.579× 10−9 rad/s,
ε(ξ5) = 5.044× 10−7 rad/s2.
3.1.2 Cálculos com as componentes de radiação
Antes de serem apresentados os resultados da análise com as componentes de radiação, é
preciso fazer uma importante constatação.
Os integrais de convolução da força de radiação calculam de uma maneira incompleta o
efeito das funções de resposta de impulso Kij , devido à limitações do WAMIT, de onde os
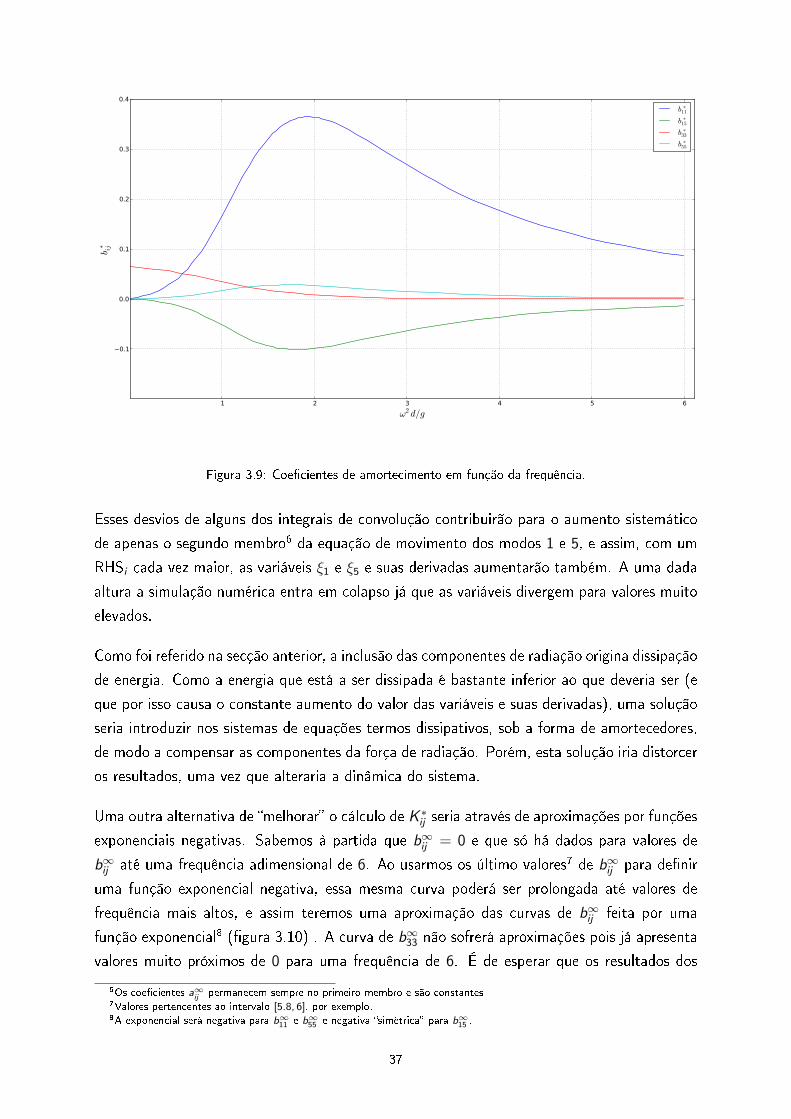
coe�cientes de massa adicionada e amortecimento por radiação foram retirados (�gura 3.9)3.
Essas limitações tornam a obtenção de resultados a altas frequências praticamente impossível
de ser feita, e assim pouco ou nada sabemos sobre os coe�ciente de amortecimento quando
passamos para um valor de frequência adimensional superior a 6.
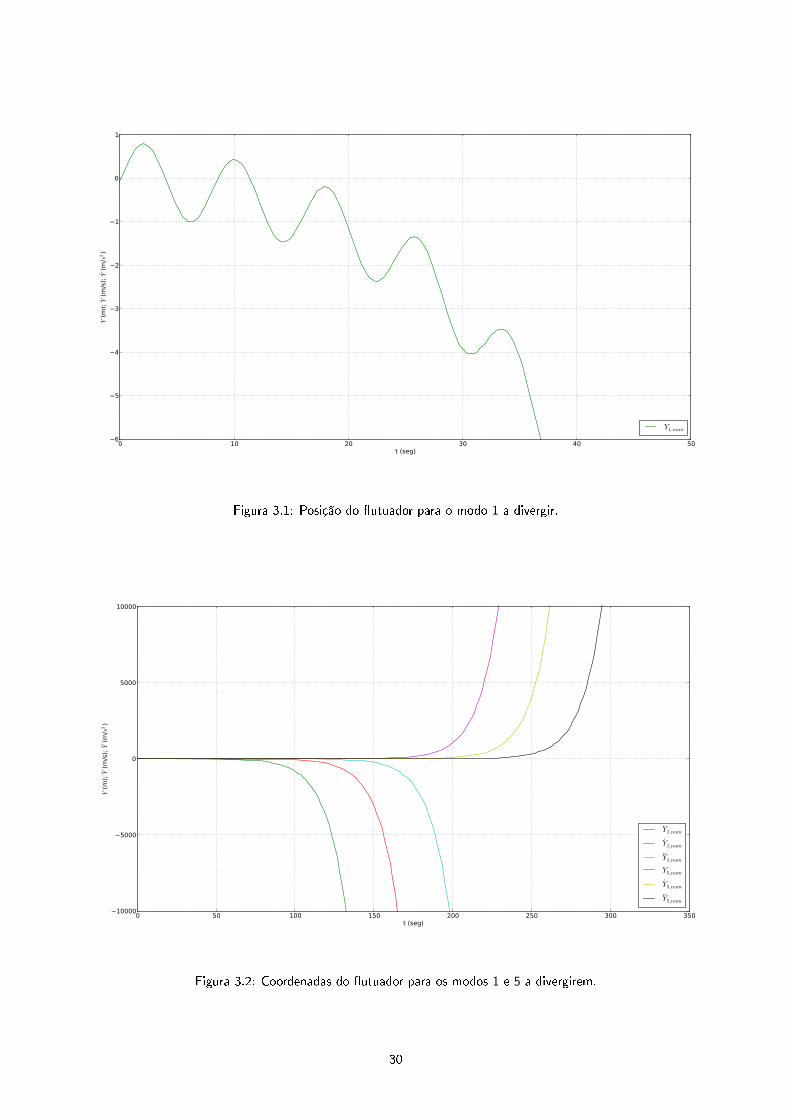
Mesmo assim, podemos veri�car pelo grá�co que os coe�cientes4 b∗33 e b∗55 estão a tender para
um valor bastante próximo de 0 (como é suposto), querendo isto dizer que os valores de K ∗33
e K ∗55 estarão bastante próximos dos valores correctos, e é por isso que os resultados iniciais
para o modo 3 estavam consistentes. Em contrapartida, os coe�cientes b∗11, b∗15 e b∗51 ainda
apresentam valores bastante longes de 0 para uma frequência adimensional de 6, e por isso os
valores de K ∗11, K∗15 e K ∗51 estarão bastante afastados da realidade.
Consequentemente, alguns dos integrais de convolução irão calcular forças de radiação que
apresentarão desvios bastante signi�cativos em relação às forças calculadas no domínio da
frequência, que por sua vez estarão bem calculadas. A razão para os valores das forças de
radiação estarem correctos no domínio da frequência deve-se ao facto dos valores de Bij(ω)
usados pertencerem ao intervalo [0, 6] em números adimensionais de frequência (�gura 3.9).
Neste caso em estudo, utilizou-se um período de onda T de 8 s, o que equivale a uma frequência
dimensional5 de 0.7854 rad/s. Utilizando a expressão 3.3 para adimensionalizar a frequência
ω = ω2d
g, (3.3)
o valor da frequência adimensional será 0.7553, ou seja, pertence ao intervalo [0, 6] da �gura 3.9
e portanto corresponde ao valor correcto.3b∗15 = b∗51 e os dois eixos representam números adimensionais. Como podemos ver no grá�co, os valores de b∗ij foram extraídos
somente para uma frequência adimensional de 6.4O símbolo �*� representa uma grandeza adimensional. Isto é válido para todo o trabalho.5ω = 2π
Te
36
1 2 3 4 5 6
ω2 d/g
0.1
0.0
0.1
0.2
0.3
0.4b∗ ij
b ∗11
b ∗15
b ∗33
b ∗55
Figura 3.9: Coe�cientes de amortecimento em função da frequência.
Esses desvios de alguns dos integrais de convolução contribuirão para o aumento sistemático
de apenas o segundo membro6 da equação de movimento dos modos 1 e 5, e assim, com um
RHSi cada vez maior, as variáveis ξ1 e ξ5 e suas derivadas aumentarão também. A uma dada
altura a simulação numérica entra em colapso já que as variáveis divergem para valores muito
elevados.
Como foi referido na secção anterior, a inclusão das componentes de radiação origina dissipação
de energia. Como a energia que está a ser dissipada é bastante inferior ao que deveria ser (e
que por isso causa o constante aumento do valor das variáveis e suas derivadas), uma solução
seria introduzir nos sistemas de equações termos dissipativos, sob a forma de amortecedores,
de modo a compensar as componentes da força de radiação. Porém, esta solução iria distorcer
os resultados, uma vez que alteraria a dinâmica do sistema.
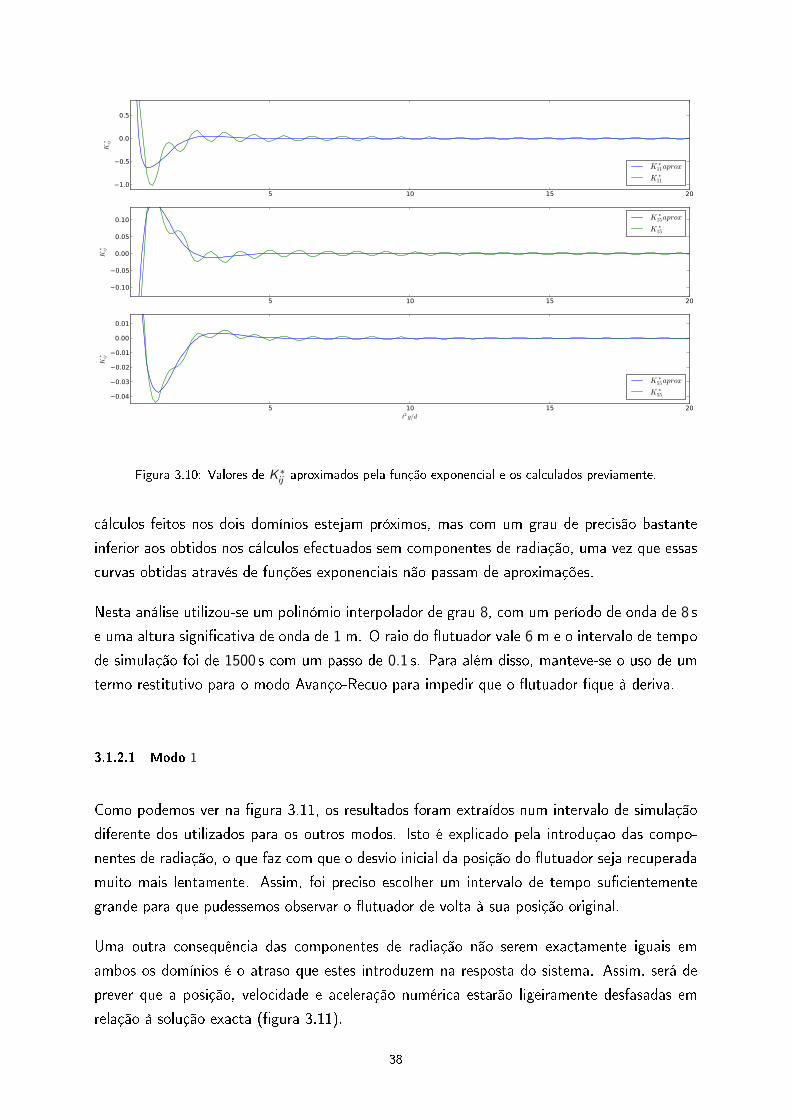
Uma outra alternativa de �melhorar� o cálculo de K ∗ij seria através de aproximações por funções
exponenciais negativas. Sabemos à partida que b∞ij = 0 e que só há dados para valores de
b∞ij até uma frequência adimensional de 6. Ao usarmos os último valores7 de b∞ij para de�nir
uma função exponencial negativa, essa mesma curva poderá ser prolongada até valores de
frequência mais altos, e assim teremos uma aproximação das curvas de b∞ij feita por uma
função exponencial8 (�gura 3.10) . A curva de b∞33 não sofrerá aproximações pois já apresenta
valores muito próximos de 0 para uma frequência de 6. É de esperar que os resultados dos
6Os coe�cientes a∞ij permanecem sempre no primeiro membro e são constantes.7Valores pertencentes ao intervalo [5.8, 6], por exemplo.8A exponencial será negativa para b∞11 e b∞55 e negativa �simétrica� para b∞15 .
37
5 10 15 20
1.0
0.5
0.0
0.5
K∗ ij
K ∗11aprox
K ∗11
5 10 15 20
0.10
0.05
0.00
0.05
0.10
K∗ ij
K ∗15aprox
K ∗15
5 10 15 20t2 g/d
0.04
0.03
0.02
0.01
0.00
0.01
K∗ ij
K ∗55aprox
K ∗55
Figura 3.10: Valores de K∗ij aproximados pela função exponencial e os calculados previamente.
cálculos feitos nos dois domínios estejam próximos, mas com um grau de precisão bastante
inferior aos obtidos nos cálculos efectuados sem componentes de radiação, uma vez que essas
curvas obtidas através de funções exponenciais não passam de aproximações.
Nesta análise utilizou-se um polinómio interpolador de grau 8, com um período de onda de 8 s
e uma altura signi�cativa de onda de 1 m. O raio do �utuador vale 6 m e o intervalo de tempo
de simulação foi de 1500 s com um passo de 0.1 s. Para além disso, manteve-se o uso de um
termo restitutivo para o modo Avanço-Recuo para impedir que o �utuador �que à deriva.
3.1.2.1 Modo 1
Como podemos ver na �gura 3.11, os resultados foram extraídos num intervalo de simulação
diferente dos utilizados para os outros modos. Isto é explicado pela introduçao das compo-
nentes de radiação, o que faz com que o desvio inicial da posição do �utuador seja recuperada
muito mais lentamente. Assim, foi preciso escolher um intervalo de tempo su�cientemente
grande para que pudessemos observar o �utuador de volta à sua posição original.
Uma outra consequência das componentes de radiação não serem exactamente iguais em
ambos os domínios é o atraso que estes introduzem na resposta do sistema. Assim, será de
prever que a posição, velocidade e aceleração numérica estarão ligeiramente desfasadas em
relação à solução exacta (�gura 3.11).
38

6500 6505 6510 6515 6520t (seg)
1.0
0.5
0.0
0.5
1.0Y (
m);
Y (
m/s
); Y
(m
/s2)
Y1,num
Y1,freq
Y1,num
Y1,freq
Y1,num
Y1,freq
6500 6505 6510 6515 6520t (seg)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Y (
m);
Y (
m/s
); Y
(m
/s2)
erro Y1 * 102
erro Y1 * 102
erro Y1 * 102
Figura 3.11: Posição, velocidade e aceleração do �utuador e seus erros em ambos os domínios, para o modo
1.
Os consequentes erros médios serão:
ε(ξ1) = 0.0445 m,
ε(ξ1) = 0.0167 m/s,
ε(ξ1) = 0.0138 m/s2.
3.1.2.2 Modo 3
Neste modo não há desvio inicial da posição média devido à presença do termo ρgAF. Mas,
de uma maneira semelhante ao modo 1 (e ao modo 5), podemos visualizar uma desfasagem
entre os resultados dos dois domínios (�gura 3.12).
Os consequentes erros médios serão:
ε(ξ3) = 0.0557 m,
ε(ξ3) = 0.0439 m/s,
ε(ξ3) = 0.0347 m/s2.
39

500 505 510 515 520t (seg)
1.0
0.5
0.0
0.5
1.0Y (
m);
Y (
m/s
); Y
(m
/s2)
Y3,num
Y3,freq
Y3,num
Y3,freq
Y3,num
Y3,freq
500 505 510 515 520t (seg)
0
1
2
3
4
5
6
7
8
Y (
m);
Y (
m/s
); Y
(m
/s2)
erro Y3 * 102
erro Y3 * 102
erro Y3 * 102
Figura 3.12: Posição, velocidade e aceleração do �utuador e seus erros em ambos os domínios, para o modo
3.
3.1.2.3 Modo 5
Neste modo não há desvio inicial da posição média devido à presença do termo ρgW55, mas,
de uma maneira semelhante ao outros modos, haverá um atraso da resposta do sistema que
provocará uma desfasagem entre os resultados dos dois domínios (�gura 3.13).
Os consequentes erros médios serão:
ε(ξ5) = 0.0326 rad,
ε(ξ5) = 0.0257 rad/s,
ε(ξ5) = 0.0203 rad/s2.
40

500 505 510 515 520t (seg)
0.2
0.1
0.0
0.1
0.2
Y (
m);
Y (
m/s
); Y
(m
/s2)
Y5,num
Y5,freq
Y5,num
Y5,freq
Y5,num
Y5,freq
500 505 510 515 520t (seg)
0
1
2
3
4
Y (
m);
Y (
m/s
); Y
(m
/s2)
erro Y5 * 102
erro Y5 * 102
erro Y5 * 102
Figura 3.13: Rotação, velocidade e aceleração angulares do �utuador e seus erros em ambos os domínios, para
o modo 5.
3.2 Introdução do lastro no sistema
3.2.1 Efeito produzido no movimento do �utuador
Depois da validação do programa, iremos introduzir o lastro no sistema e estudar o seu efeito.
Como referido anteriormente, o lastro só actuará quando o �utuador estiver no seu movimento
ascendente, e assim podemos concluir que o seu efeito e variação serão não-linear.
O lastro irá actuar como uma restrição ao movimento quando formos analisar os modos 1 e 3,
uma vez que irá acrescentar inércia ao sistema. Isto poderá não ser verdade no modo 5, pois
o descentramento do cabo de ligação do lastro ao �utuador produzirá uma rotação positiva
(�gura 2.3).
O estudo será feito com a inclusão das forças de radiação. As características da onda e o
período de simulação serão mantidos, e teremos também mL = 50000 kg, ρL = 2500 kg/m3
e b = 1.0 m.
41

530 535 540 545 550t (seg)
0.6
0.4
0.2
0.0
0.2
0.4
0.6
0.8Y (
m);
Y (
m/s
); Y
(m
/s2)
Y1,num
Y1,num
Y1,num
Figura 3.14: Posição, velocidade e aceleração do �utuador para o modo 1.
3.2.1.1 Modo 1
O modo de avanço-recuo será o modo com menos alterações sofridas devido à inclusão do
lastro porque não está directamente relacionado com este (equação 2.19). Mesmo assim, este
modo estará sempre interligado com o modo 5, devido aos efeitos de radiação, e assim será
de esperar pequenos desvios das variáveis de posição, velocidade e aceleração.
Como podemos visualizar, a alteração mais signi�cativa da �gura 3.14 reside na aceleração. Já
sabemos que aceleração no domínio do tempo é descontínua, mas agora o desvio é maior porque
corresponde ao instante em que o lastro entra em acção/pára de actuar. Se compararmos esta
�gura com a �gura 3.11, podemos ver também que há uma pequena contracção das amplitudes
de posição e velocidade, fruto do aumento da inércia do sistema devido à inclusão do lastro.
3.2.1.2 Modo 3
O modo 3 será o que mais alterações irá sofrer já que o cabo do lastro é vertical. Como
podemos observar na �gura 3.15, no momento que o �utuador começa a subir (correspondente
à posição mais negativa), o lastro comeca a actuar e o declive da curva de velocidade diminui,
o que representa um aumento de inércia do sistema. Como a curva da aceleração não é
contínua no tempo, podemos visualizar um desvio abrupto no instante em que o efeito do
lastro é contabilizado.
42

500 505 510 515 520t (seg)
0.8
0.6
0.4
0.2
0.0
0.2
0.4
0.6Y (
m);
Y (
m/s
); Y
(m
/s2)
Y3,num
Y3,num
Y3,num
Figura 3.15: Posição, velocidade e aceleração do �utuador para o modo 3.
Quando a posição do �utuador atinge o seu valor máximo, o lastro deixa de actuar e a
aceleração torna-se menos negativa, devido ao abaixamento da inércia do sistema.
Outra consequência da actuação do lastro ser apenas na fase ascendente do �utuador é a
diferença entre o valor máximo e o mínimo da curva de posição. Naturalmente, o valor
máximo será inferior ao mínimo, pelas razões acima apresentadas.
3.2.1.3 Modo 5
Da �gura 3.16 podemos tirar as mesmas conclusão que as do modo 1, mas com uma importante
diferença: a introdução do lastro irá aumentar os valores de rotação, uma vez que o lastro
adiciona um momento positivo ao sistema de equações de movimento. Assim, o valor máximo
positivo de rotação é superior ao valor máximo negativo.
3.2.2 Energia e Potência extraída
Uma outra análise que pode ser efectuada é a contabilização da energia (e consequentemente
da potência) potencial armazenada no lastro, quando este sobe juntamente com o �utuador.
Essa energia EL pode ser calculada pela seguinte expressão
EL = mLg′∆z , (3.4)
43

870 875 880 885 890t (seg)
0.2
0.1
0.0
0.1
0.2Y (
m);
Y (
m/s
); Y
(m
/s2)
Y5,num
Y5,num
Y5,num
Figura 3.16: Rotação, velocidade e aceleração angulares do �utuador para o modo 5.
onde ∆z corresponde à distância percorrida pelo lastro desde o início da simulação até a um
determinado valor (máximo ou não), e g ′ corresponde à aceleração gravítica equivalente.
Num intervalo de tempo de simulação ∆t, a potência média relativa à energia potencial do
lastro PL será
PL =mLg
′∆z
∆t. (3.5)
Assim, através da �gura 3.17, calculamos a diferença entre o máximo e o mínimo da curva de
posição9, que vale aproximadamente 1.41 m. Sabemos também que essa diferença é alcançada
em metade do perído de onda, ou seja, 4 s. Podemos concluir portanto que a cada 8 s o lastro
irá subir aproximadamente 1.41 m (�gura 3.18)10.
Quanto maior for a distância percorrida (∆z), maior será a energia potencial contida no lastro.
Além disso, se mantivermos constante a distância percorrida, a energia potencial poderá ser
aumentada se aumentarmos também a densidade (e consequentemente a massa) do lastro
ρL. Este aumento de energia potencial devido ao aumento da massa do lastro pode não ser
traduzida num aumento da potência média, já que um lastro mais pesado demorará mais
tempo a alcançar a mesma distância (�gura 3.19).
9Como visto anteriormente, ξL = ξ3.10O lastro actua durante 4 s e depois deixa de actuar nos próximos 4 s.
44

505 510 515 520t (seg)
0.8
0.6
0.4
0.2
0.0
0.2
0.4
0.6
Y (
m);
Y (
m/s
); Y
(m
/s2)
Y3,num
Figura 3.17: Posição do �utuador para o modo 3.
0 50 100 150 200 250∆t (seg)
0
5
10
15
20
25
30
35
40
45
∆z
(m)
mL1 =50000kg
Figura 3.18: Posição do lastro desde o início da simulação.
45
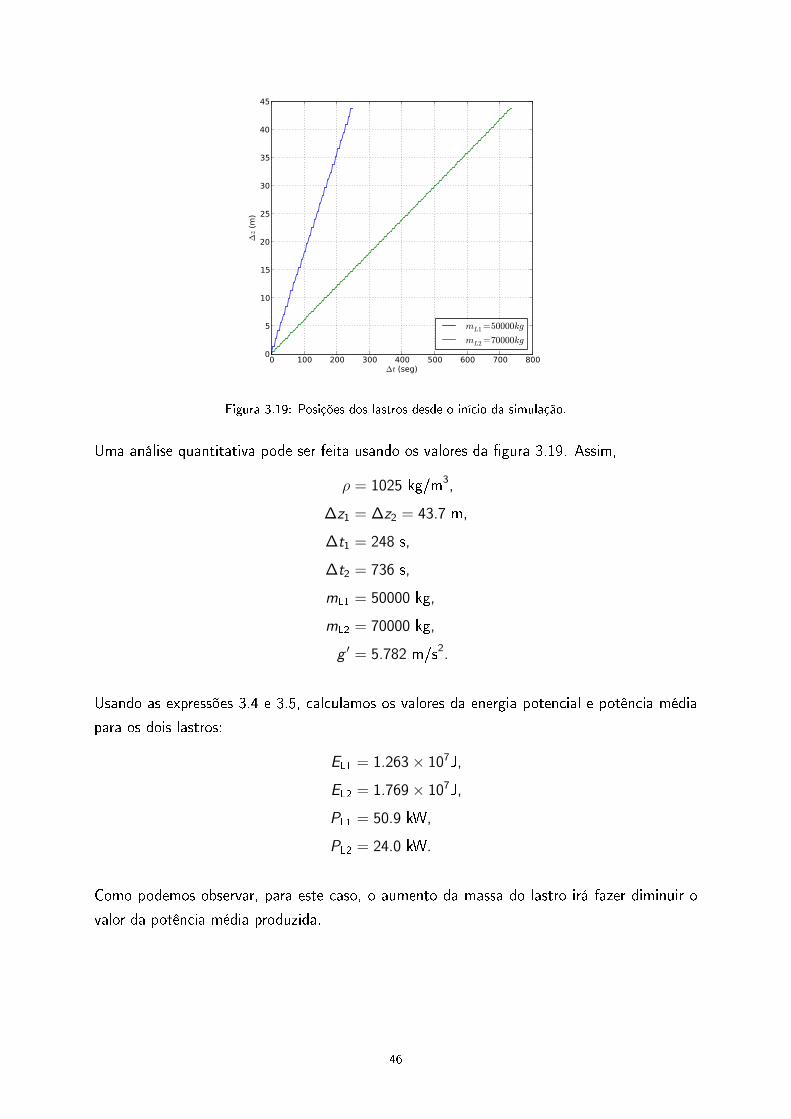
0 100 200 300 400 500 600 700 800∆t (seg)
0
5
10
15
20
25
30
35
40
45
∆z
(m)
mL1 =50000kg
mL2 =70000kg
Figura 3.19: Posições dos lastros desde o início da simulação.
Uma análise quantitativa pode ser feita usando os valores da �gura 3.19. Assim,
ρ = 1025 kg/m3,
∆z1 = ∆z2 = 43.7 m,
∆t1 = 248 s,
∆t2 = 736 s,
mL1 = 50000 kg,
mL2 = 70000 kg,
g ′ = 5.782 m/s2.
Usando as expressões 3.4 e 3.5, calculamos os valores da energia potencial e potência média
para os dois lastros:
EL1 = 1.263× 107J,
EL2 = 1.769× 107J,
PL1 = 50.9 kW,
PL2 = 24.0 kW.
Como podemos observar, para este caso, o aumento da massa do lastro irá fazer diminuir o
valor da potência média produzida.
46

Capítulo 4
Conclusões
Este trabalho teve como objectivo estudar o movimento de um �utuador quando excitado por
uma força oscilatória representada por uma onda sinusoidal. Sendo um trabalho essencialmente
numérico, há sempre simpli�cações que têm que ser feitas de modo que seja possível conceber
um programa de simulação que possa realmente calcular e produzir resultados. Assim sendo,
é preciso ter sempre um olhar crítico para sabermos se as simpli�cações são coerentes e
consistentes, se os resultados obtidos são os previstos, e, quando isto não acontece, tentar
perceber o porquê das diferenças.
Toda a formulação matemática foi deduzida para o caso especí�co de um �utuador para os mo-
dos de arfagem, avanço/recuo e cabeceio. Assim, e após a tradução de fórmulas/equações de
linguagem matemática para a computacional, foi necessário veri�car os resultados produzidos
pelo programa numérico.
A primeira parte da veri�cação consistiu na comparação dos domínios do tempo (numérico)
e da frequência (solução analítica) sem a inclusão dos termos de radiação. Esta análise
foi efectuada de modo a haver con�rmação que o programa estava a utilizar e manipular
correctamente os dados de entrada. Con�rmou-se que o programa de facto produzia resultados
comparáveis com os resultados do domínio da frequência para a posição, a rotação, a velocidade
e a aceleração do �utuador. Foi explicado também a necessidade de se inserir um pequeno
termo de restituição na equação do modo 1, de modo a estabilizar o erro de posição, uma
vez que as diferenças entre os domínios, embora fossem mínimas, acumulavam-se ao longo do
tempo de simulação, e sem a inclusão deste termo o �utuador �caria à deriva.
Fez-se também uma análise das forças de excitação para os 3 modos, e comprovou-se que as
mesmas eram oscilatórias. Aliás, como a formulação matemática foi baseada na teoria linear
das ondas, as respostas do sistema (i.e. posições e consequentes derivadas) também teriam
que ser oscilatórias, o que foi veri�cado.
47

A segunda parte da veri�cação consistiu na comparação dos domínio do tempo e da frequência
com a inclusão dos termos de radiação. Esta análise foi efectuada para haver a certeza de que
os integrais de convolução estavam a ser bem calculados, e para termos o programa numérico a
simular condições reais de funcionamento de um �utuador. Desde logo descobriu-se diferenças
signi�cativas entre a força de radiação obtida no domínio da frequência e no domínio do tempo,
uma vez que as soluções para os modos 1 e 5 divergiam.
Experimentou-se utilizar termos de dissipação (amortecedores) para tentar estabilizar o sis-
tema, o que foi conseguido, mas os resultados, que aparentavam estarem bons devido aos
pequenos erros veri�cados nas soluções para entre os domínios, não teriam muito valor, pois
a introdução dos amortecedores alterava a dinâmica do sistema.
Após algumas tentativas, descobriu-se que as diferenças entre as forças de radiação calculada
nos dois domínios se deviam às funções de resposta de impulso, Kij , que por sua vez eram
calculadas através dos coe�cientes de amortecimento por radiação - bij . Esses coe�cientes
foram retirados do WAMIT e fornecidos para a elaboração deste trabalho. O que se veri�cou
foi que os dados estavam incompletos, devido à limitações do WAMIT, pois não existiam
resultados de bij para frequências elevadas, e assim todos os valores dependentes de bij estavam
também mal calculados.
Para corrigir essa de�ciência, resolveu-se fazer um prolongamento da curva de bij para altas
frequências, utilizando uma aproximação por funções exponenciais negativas. Assim, tendo um
espectro maior de valores bij , os valores de Kij seriam calculados de uma maneira muito mais
completa e os integrais de convolução produziriam valores consistentes. Foi isso mesmo que
se veri�cou, ao serem obtidos resultados comparáveis para a posição, a rotação, a velocidade
e a aceleração entre os dois domínios em estudo. Mesmo assim, a análise sem radiação
apresentou melhores resultados, uma vez que o prolongamento feito nas curvas de bij , embora
tenha corrigido signi�cativamente os cálculos dos integrais de convolução, não passa de uma
aproximação.
A última análise feita neste trabalho foi a da inclusão do lastro no sistema. Esta análise
permitiu estudar o efeito que o lastro tem nos três modos, ao variarmos alguns parâmetros,
tais como a massa do lastro. Esta análise, utilizando variações de parâmetros, só foi efectuada
com o lastro, pois este introduz um efeito não-linear no sistema. Pudemos con�rmar que as
alterações mais signi�cativas acontecem no modo 3, o que seria de esperar, já que o lastro é
vertical.
Podemos concluir portanto que, embora tenha havido algumas di�culdades no tratamento de
dados, o trabalho atingiu os seus objectivos, com resultados bastante positivos e elucidativos.
Como proposta para o futuro, é sugerido um estudo mais aprofundado deste sistema, com
48

ênfase em extracção de energia e clima de ondas.
49

50

Bibliogra�a
[1] Falcão A.F.O. Energia das Ondas, Sebenta da disciplina de Energias Renováveis. AEIST,
2007.
[2] Aquatera Environmental Services and Products. Disponível em http://www.aquatera.
co.uk/, 2011.
[3] Aqua-RET. Ondas - fonte e localização do recurso energético. Disponível em
http://www.aquaret.com/index.php?option=com_content&view=article&id=
134&Itemid=277&lang=pt, 2011.
[4] Glasgow MSc Energy Systems, University of Strathclyde. Disponível em http://www.
esru.strath.ac.uk/EandE/Web_sites/01-02/RE_info/index.htm.
[5] R.J.P. Fraga. Desenvolvimento de um novo sistema de aproveitamento de energia das
ondas. Master's thesis, Instituto Superior Técnico, 2011.
[6] Johannes Falnes. Ocean Waves and Oscillating Systems. Cambridge, 2004.
[7] J.C.C. Henriques and J.M.C.S. André. Dispositivo de aproveitamento de energia das
ondas, Patente PT 104885, 2010.
[8] J.C.C. Henriques, M.F.P. Lopes, R.F.C. Gomes, L.M.C. Gato, and A.F.O. Falcão. Perfor-
mance evaluation of a two-body heaving wec with latching control using a new numerical
method. In Procedings of the 9th European Wave and Tidal Energy Conference, 2011.
[9] Andrew Price. The global energy investment leaderboard. Disponível em http://www.
good.is/post/the-global-energy-investment-leaderboard/, Mar 2010.
[10] Pelamis Wave Power. Disponível em http://www.pelamiswave.com/our-projects/
agucadoura.
[11] O Público. Central de energia das ondas do pico em risco de abandono por falta de �nan-
ciamento de 500 mil euros. Disponível em http://ecosfera.publico.pt/noticia.
51
aspx?id=1472594, Dez 2010.
[12] Guilherme Paredes, Francisco Taveira-Pinto, M. F. P. Lopes, R. P. F. Gomes, and L. M. C
Gato. Estudo experimental do �utuador de um sistema o�shore de energia das ondas.
2008.
[13] WAMIT. WAMIT User Manual. 2006.
[14] J.M.C.S. André. Numerical modelling of a new concept of o�shore wave energy power
plant. Technical report, Instituto Superior Técnico, 2010.
[15] M.F.P. Lopes. Experimental Development of O�shore Wave Energy Converter. PhD
thesis, Instituto Superior Técnico, 2011.
[16] H. Pina. Métodos Numéricos. McGraw-Hill, 1995.
[17] F.M. White. Mecânica dos Fluidos,. McGraw-Hill, 4 edition, 2002.
[18] J.C.C. Henriques. Simulation and optimization of a two-body point absorber with latching
control for a wave climate. Technical report, IDMEC/Instituto Superior Técnico, 2010.
52
Anexo A
Adimensionalizações do WAMIT
Uma grandeza adimensional é um número que é desprovido de qualquer unidade física que o
de�na. Os números adimensionais são de�nidos como produtos ou quocientes de quantidades
cujas unidades se cancelam. Dependendo do seu valor, estes números têm um signi�cado
físico que caracteriza determinadas propriedades para alguns sistemas.
A análise dimensional é um método para se reduzir o número e a complexidade das variáveis que
afectam um dado fenómeno físico, pela aplicação de uma espécie de técnica de compactação.
Esta análise ajuda a pensar e a planear uma experiência ou uma teoria, pois ela sugere formas
adimensionais de escrever as equações, antes que gastemos tempo e dinheiro desnecessários
ao tentar procurar soluções. Além disso, é nos fornecido leis de transposição que permitem
converter dados de um modelo pequeno e barato em informação de projecto de um protótipo
grande e caro [17], evitando mais uma vez gastos com experimentações que podem não
produzir resultados.
Portanto, as grandezas adimensionais são de grande utilidade quando se efectuam estudos
sobre modelos matemáticos, variações de escala e correlações de variáveis em um determinado
sistema.
Na elaboração da formulação matemática e do programa numérico deste trabalho, foram
utilizados diversos valores adimensionais, provenientes de certos programas, que posteriormente
foram convertidos em valores dimensionais através de factores que serão apresentados na
secção seguinte.
53

modo i expoente m
1 2
3 2
5 3
Tabela A.1: Valores do expoente m em função do modo i
A.1 Força de Difracção
No cálculo desta grandeza foram utilizados valores provenientes do �WAMIT�, um programa
numérico que estuda os efeitos das ondas em estruturas �o�-shores�. Assim, foi retirado do
WAMIT os valores dos coe�cientes da força de excitação na sua forma adimensional. Para
converter esses valores na sua forma dimensional, utilizou-se a fórmula
Γi = Γ∗i ρgdm, (A.1)
onde Γ∗i representa o valor adimensional do coe�ciente da força de excitação obtida no WAMIT,
para um determinado modo i (tabela A.1).
A.2 Massas adicionadas a∞ij
Os termos das massas adicionadas existentes nas equações de movimento representam o vo-
lume de �uido que é arrastado, aquando do movimento do corpo �utuante, e dependem da
geometria do �utuador, bem como do modo no qual esse arrastamento é medido.
Assim, e através do WAMIT, os valores adimensionais das massas adicionadas serão os se-
guintes (tabela A.2).
A obtenção dos seus valores dimensionais será feita através da seguinte conversão
a∞ij = a∞ij∗ρdk , (A.2)
onde k dependerá do modo (tabela A.3).
coe�ciente valor
a∞11∗ 2.924031E-01
a∞15∗ -1.170691E-01
a∞33∗ 1.572209E-01
a∞51∗ -1.170662E-01
a∞55∗ 5.111405E-02
Tabela A.2: Valores dos coe�cientes de massa adicionada
54

modo expoente k
11 3
15 4
33 3
51 4
55 5
Tabela A.3: Valores do expoente k em função do modo
Como se pode ver da tabela A.3, os coe�cientes cruzados 15 e 51 são negativos. Isto signi�ca
que a ocorrência simultânea destes modos provoca tanto um arrastamento de �uido, como
uma radiação de ondas, de valor inferior ao que se obteria no caso destes modos ocorrem
isoladamente[12]. Assim, o seu contributo é negativo.
A.3 Função de história K
A função de história K é calculada utilizando coe�cientes de radiação obtidos mais uma vez
pelo WAMIT. Na sua forma adimensional, a expressão para o cálculo do K é [18]
K ∗(t) =2
π
∫ ∞0
B∗(ω) ω cos(ωt)dω (A.3)
onde B∗(ω) é o coe�ciente de radiação retirado do WAMIT. Esta fórmula é obtida através de
sucessivas manipulações da equação 2.11, como podemos ver1:
K (t) =2
π
∫ ∞0
B(ω) cos(ωt) dω
=2ρdk
π
∫ ∞0
B(ω)
ρdkωω
√d
g
(√g
d
)2
cos(ω
√d
gt
√g
d
)dω
√d
g
=2ρdk
π
∫ ∞0
B∗(ω)ω(gd
)cos(ωt) dω
=2ρdk
π
g
d
∫ ∞0
B∗(ω)ω cos(ωt) dω
K (t)
ρgdk−1=
2
π
∫ ∞0
B∗(ω) ω cos(ωt) dω
K ∗(t) =2
π
∫ ∞0
B∗(ω) ω cos(ωt) dω,
1Um dos passos intermédios involve adimensionar o tempo t = t√
gde a frequência ω = ω
√dg
55

K expoente s
11 2
15 3
33 2
51 3
55 4
Tabela A.4: Valores do expoente s em função do K
onde k representa o mesmo valor de expoente utilizado na expressão das massas adicionadas
a∞ij . Podemos portanto concluir que a dimensionalização do K terá a forma
K (t) = K ∗(t) ρgd s , s = k − 1 (A.4)
De um modo semelhante à secção anterior, o expoente s será diferente para cada modo (tabela
A.4).
56

Anexo B
Cálculo das amplitudes no domínio
da frequência
B.1 Modos 1 e 5
A solução genérica para um sistema de equações do tipo[A B
C D
](x
y
)=
[f1
f2
]
pode ser calculada utilizando as propriedades da matriz inversa, de maneira que(x
y
)=
1
det
[D −B−C A
][f1
f2
]
e onde o determinante da matriz (antes de ser invertida) é calculado pela expressão
det = AD − BC
Consequentemente, teremos
(x
y
)=
1
det
Df1 − Bf2
−Cf1 + Af2
Para determinarmos as amplitudes complexas dos modos 1 e 5, iremos passar as equações 2.56
e 2.57 do domínio do tempo para as suas expressões equivalentes no domínio da frequência.
No domínio da frequência, cada valor de frequência corresponderá a um determinado valor de
57

massa adicionada e de coe�ciente de amortecimento por radiação, e uma vez que
ξi = −ω2Y0i
ξi = iωY0i com i = 1 ou 5
ξi = Y0i ,
as equações 2.56 e 2.57 no domínio da frequência serão as seguintes:[− ω2
(mF + a11(ω)
)+ iωB11(ω)
]Y01 +
[− ω2a15(ω) + iωB15(ω)
]Y05 = Fd,1 (B.1)[
−ω2a51(ω) + iωB51(ω)
]Y01 +
[−ω2
(I Fyy +a55(ω)
)+ iωB55(ω) +ρgW55
]Y05 = Fd,5 (B.2)
Se pusermos as duas equações acima descritas (B.1 e B.2) sob a forma matricial, teremos um
sistema de equações genérico [A B
C D
](Y01
Y05
)=
[Fd,1
Fd,5
],
onde
A = −ω2(mF + a11(ω)
)+ iωB11(ω)
B = −ω2a15(ω) + iωB15(ω)
C = −ω2a51(ω) + iωB51(ω)
D = −ω2(I Fyy + a55(ω)
)+ iωB55(ω) + ρgW55
e assim obtém-se os valores de Y01 e Y05.
B.2 Modo 3
A passagem da equação 2.53 do domínio do tempo para o domínio da frequência resulta na
seguinte equação: [− ω2
(mF + a33(ω)
)+ iωB33(ω) + ρgAF
]Y03 = Fd,3 (B.3)
Ao isolarmos Y03, �caremos com
Y03 =Fd,3
−ω2(mF + a33(ω)
)+ iωB33(ω) + ρgAF
(B.4)
que corresponde exactamente à equação 2.54.
58