取扱説明書基本編 -...
TRANSCRIPT

6E8C4890
取扱説明書基本編エンジニアリングツール4
4890.4.1109
ユニファイドコントローラ
nvシリーズ統合コントローラvseries
エンジニアリングツール4 取扱説明書基本編
ユニファイドコントローラnv シ
リーズ
統合コントローラvseries

ユニファイドコントローラnvシリーズ/統合コントローラVシリーズエンジニアリングツール4 取扱説明書基本編
ご注意
⑴本書に掲載してある技術情報は、製品の代表的動作・応用を説明するためのもので、その使用に際しての当社および第三者
の知的財産権その他の権利に対する保証または実施権の許諾を行うものではありません。
⑵本書の内容の一部または全部を無断で転載することは禁止されています。
⑶本書の内容については、お断りなく変更することがあります。
⑷本書の内容については万全を期しておりますが、万一不可解な点や、誤り、お気づきの点がございましたら、ご一報くだ
さいますようお願いいたします。
PROSEC 、TOSLINE、TOSDIC、CIEMACは、株式会社 東芝の登録商標または商標です。
Microsoft、Windowsは、米国Microsoft Corporationの米国および他の国における登録商標です。
DeviceNetは、Open DeviceNet Vender Association Inc.の登録商標です。
2011年 9月 第4版 発行
発 行 株式会社 東 芝 社会インフラシステム社計測制御機器部
ⒸToshiba Corporation All Right Reserved. 2008-2011 無断複製および転載を禁ず(TDOC)

ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 i
用途制限
■ この製品は、人の生命に直接関わる装置など(注 1)を含むシステムに使用できるよう開発・製作さ
れたものではないので、それらの用途に使用しないでください。
■ この製品を、人の安全に関与し、公共の機能維持に重大な影響を及ぼす装置などを含むシステム(注
2)に使用する場合は、システムの運用、維持、管理に関して、特別な配慮(注 3)が必要となるので、
当社営業窓口に相談してください。
(注 1) 人の生命に直接関わる装置などとは、以下のものをいいます。
・ 生命維持装置や手術室用機器などの医療用機器
(注 2) 人の安全に関与し、公共の機能維持に重大な影響を及ぼす装置などを含むシステムとは、以
下のようなものをいいます。
・ 原子力発電所の主機制御システム、原子力施設の安全保護系システム、その他安全上重要
な系統およびシステム
・ 集団輸送システムの運転制御システムおよび航空管制制御システム
(注 3) 特別な配慮とは、当社技術者と十分な協議を行い、安全なシステム(フールプルーフ設計、フ
ェールセーフ設計、冗長設計するなど)を構築することをいいます。
免責事項
■ 地震・雷風・水害および当社の責任以外の火災、第三者による行為、その他の事故、お客様の故意ま
たは過失、誤用、その他異常な条件下での使用により生じた損害に関して、当社は一切責任を負いま
せん。
■ この製品の使用または使用不能から生ずる付随的な損害(事業利益の損失、事業の中断、記憶内容の
変化・消失など)に関して、当社は一切責任を負いません。
■ 取扱説明書に記載された内容を守らずに生じた損害に関して、当社は一切責任を負いません。
■ 接続機器との組合せによる誤動作などから生じた損害に関して、当社は一切責任を負いません。
■ お客様作成のアプリケーションプログラムとの組合せによる誤動作などから生じた損害に関して、当
社は一切責任を負いません。
お願い
携帯電話や PHS は、運転中のコントローラ本体および各種伝送ケーブル、I/O バスケーブルなど
から 1m 以上離れたところでご使用ください。システムが誤動作する恐れがあります。

6E8C4890 ii
この文書は、ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズのエンジニアリ
ングツール4および、統合コントローラ V シリーズのエンジニアリングツール3、エンジニアリング
ツール2(以下 V-Tool と略す)共通の取扱説明書のひとつです
■エンジニアリングツール4(Ver.4)をご使用される方 全ての機能をサポートしています。
■エンジニアリングツール3(Ver.3)をご使用される方 エンジニアリングツール4(Ver.4)で追加された機能はサポートしていません。
■エンジニアリングツール2(Ver.2)をご使用される方 エンジニアリングツール4(Ver.4)および、エンジニアリングツール3(Ver.3)で追加された機
能はサポートしていません。
詳しくは、Ver.3 で追加された機能をお読みください。
V-Tool は、nv シリーズおよび、V シリーズのコントローラに対して、お客様のアプリケーションソフ
トウェアを構成、作成、動作確認、保守するために必要なソフトウェアです。
この文書は、V-Tool のセットアップや入門的な使い方を理解された方を対象に、次の内容を説明して
います。
第 1 章 nv シリーズ/V シリーズの基礎知識
第 2 章 ハードウェアの登録
第 3 章 変数の登録
第 4 章 Tag の登録
第 5 章 制御プログラムの作成
第 6 章 制御パラメータの設定
第 7 章 ダウンロード/アップロード
第 8 章 制御プログラムのモニタ
第 9 章 nv シリーズのシステムのモニタと保守
第 10 章 V シリーズのシステムのモニタと保守
第 11 章 ツールの保守
第 12 章 図書の印刷
V-Tool の取扱説明書は、次のとおりです。
・セットアップ編 :6E8C4891(日本語版),6F8C1291(英語版)
・基本編 :6E8C4890(日本語版),6F8C1290(英語版)
関係する文書として、次があります。 必要に応じて参照してください。
・命令語説明書 :6E8C4826(日本語版),6F8C1226(英語版)
・Ver.1 セットアップ編 :6E8C3843(日本語版),6F8C0873(英語版)
・Ver.1 入門編 :6E8C3917(日本語版),6F8C0874(英語版)
・Ver.1 基本編 :6E8C3918(日本語版),6F8C0875(英語版)

ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 iii
第 1 章
nV シリーズ/V シリーズの 基礎知識
…1
1.1 エンジニアリングの流れ··························································3
1.2 nv シリーズ/V シリーズのハードウェアモデル ···············6
1.2.1 システム構成 ··································································8
1.2.2 ステーション構成 ···························································16
1.3 nv シリーズ/V シリーズのソフトウェアモデル ·············48
1.3.1 タスク ···········································································49
1.3.2 タスクエントリ ····························································50
1.3.3 プログラム····································································51
1.3.4 ファンクションブロック··············································54
1.3.5 ファンクション ····························································57
1.3.6 変数とデータ型 ····························································63
1.3.7 データ型定義 ································································67
1.3.8 標準のデータ型宣言 ·····················································70
1.3.9 識別子 ···········································································72
1.3.10 プログラミング言語 ·····················································73
1.3.11 ラダー・ダイヤグラム(LD) ·······································74
1.3.12 ファンクション・ブロック・ダイヤグラム(FBD)····75
1.3.13 シーケンシャル・ファンクション・チャート(SFC) 76
1.3.14 ストラクチャード・テキスト(ST) ····························77
1.3.15 グラフィカル言語の制約··············································81
1.3.16 制御文の使い方 ····························································89
1.3.17 グラフィカル言語の実行順 ··········································98
1.3.18 コントローラ変数·······················································100
1.3.19 I/O 変数·····································································103
1.3.20 ステーション変数·······················································108
1.3.21 ネットワーク変数·······················································110
1.3.22 コンフィグレーション ···············································112
第 2 章
ハードウェア の登録
…113
2.1 システムを登録する······························································114
2.2 ステーション構成を登録する··············································115
2.3 ネットワーク構成を登録する··············································119
2.4 モジュールパラメータを登録する······································121
2.5 モジュールパラメータの意味··············································130
2.5.1 nV シリーズのモジュールパラメータの意味 ············130
2.5.2 V シリーズのモジュールパラメータの意味···············133
2.6 I/O コネクションの領域を変更する ································139
2.7 I/O モジュールを移動する ················································142
2.8 I/O モジュールの機種を変更する ····································145
2.9 I/O ループ接続情報を登録する ········································147
6E8C4890 iv
第 3 章
変数の登録
…155
3.1 コントローラ変数を登録する··············································157
3.2 ステーション変数を登録する··············································163
3.3 I/O 変数を登録する·····························································169
3.4 ネットワーク変数を登録する··············································172
3.5 ユーザデータ型(構造体)を定義する······························183
3.6 TC-net100 を経由して入出力する ··································185
3.6.1 TC-net100 を経由して I/O へ出力する ··················185
3.6.2 TC-net100 を経由して I/O から入力する ··············187
3.7 入出力データを TC-net100 へ転写する ·························189
3.7.1 /O への出力データを TC-net100 へ転写する········189
3.7.2 I/O からの入力データを TC-net100 へ転写する ···191 第 4 章 Tag の登録
…193
4.1 Tag を登録する ·····································································194
4.2 Tag パラメータの意味 ·························································203
4.2.1 MCS 型·······································································203
4.2.2 DS 型 ··········································································216
4.3 Tag をインポートする ·························································241
4.4 Tag をエクスポートする ·····················································244
第 5 章
制御プログラム の作成
…247
5.1 プログラムエディタの種別··················································249
5.2 セミグラフィック··································································250
5.2.1 プログラムエディタの構成 ········································251
5.2.2 タスクを開く ······························································253
5.2.3 プログラムを描画する ···············································258
5.2.4 変数を入力する ··························································263
5.2.5 変数を宣言する ··························································265
5.2.6 ファンクションを使う ···············································269
5.2.7 ファンクションブロックを使う·································272
5.2.8 変数や命令語を検索・置換する·································274
5.2.9 さまざまな編集表示機能············································278
5.2.10 タスクを保存する·······················································281
5.2.11 変数コメント命令語の実行順序を表示する···············282
5.2.12 クロスリファレンスを利用する·································284
5.2.13 デバイス変数プロパティ············································286
5.3 テキスト ·····················································································289
5.3.1 プログラムエディタの構成 ······································· 290
5.3.2 タスクを開く ······························································291
5.3.3 プログラムを記述する ···············································293
5.3.4 変数を入力する ··························································295
5.3.5 変数を宣言する ··························································296
5.3.6 ファンクションを使う ···············································297

ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 v
5.3.7 ファンクションブロックを使う·································298
5.3.8 変数を検索・置換する ···············································299
5.3.9 タスクを保存する·······················································300
5.3.10 クロスリファレンスを利用する·································304
5.3.11 デバイス変数プロパティ············································306
5.4 フルグラフィック··································································308
5.4.1 プログラムエディタの構成 ········································309
5.4.2 タスクを開く ······························································311
5.4.3 プログラムを描画する ···············································316
5.4.4 変数を入力する ··························································327
5.4.5 変数を宣言する ··························································328
5.4.6 ファンクションを使う ···············································332
5.4.7 ファンクションブロックを使う·································336
5.4.8 変数や命令語を検索・置換する·································338
5.4.9 さまざまな編集・表示機能 ········································342
5.4.10 タスクを保存する·······················································347
5.4.11 データ型命令語の実行順序を表示する······················348
5.4.12 クロスリファレンスを利用する·································350
5.4.13 デバイス変数プロパティ············································352
5.4.14 不定型ファンクション命令を利用する······················354
5.4.15 命令語の実行順序を変更する ····································364
5.4.16 タブ機能を利用する ···················································367
5.5 ユーザファンクションを作る··············································369
5.6 ユーザファンクションブロックを作る······························372
5.7 Tag シンボルを使う ·····························································375
5.8 プログラムを再利用する······················································376
5.9 システムを一括してコンパイルする··································378
5.10 コントローラを一括してコンパイルする··························380
5.11 変更時の影響箇所を検索する··············································382
5.12 プログラムにセキュリティを設定する······························385
5.13 変数名の重複を検索する······················································388
5.14 変数アドレスの重複を検索する··········································391
5.15 変数の重複出力をチェックする··········································394
5.16 変数の入出力をチェックする··············································397
5.17 カスタムシンボルを使う······················································401
5.18 カスタムシンボルを作成する··············································405
5.19 プログラムで利用されていない変数を検索する ·············414

6E8C4890 vi
第 6 章
制御パラメータ の設定
…417
6.1 データビューで値を設定する··············································419
6.2 Tag エディタで値を設定する ·············································422
第 7 章
ダウンロード/ アップロード
…425
7.1 コントローラと接続する······················································427
7.2 コントローラへ一括ダウンロードする······························436
7.2.1 nv シリーズのコントローラへ一括ダウンロードする ···436
7.2.2 V シリーズのコントローラへ一括ダウンロードする·····446
7.3 タスクを個別にダウンロードする······································460
7.4 コントローラから一括アップロードする··························462
第 8 章
制御プログラム のモニタ
…467
8.1 セミグラフィック··································································469
8.1.1 プログラムをモニタする············································469
8.1.2 ファンクション内部をモニタする ·····························470
8.1.3 ファンクションブロック内部をモニタする···············470
8.1.4 オンラインでフォースをかける·································471
8.1.5 オンラインでスワップする ········································474
8.1.6 シーケンスタグを操作する ········································476
8.2 テキスト··················································································481
8.2.1 プログラムをモニタする············································481
8.2.2 ファンクション内部をモニタする ·····························482
8.2.3 ファンクションブロック内部をモニタする···············482
8.3 フルグラフィック··································································483
8.3.1 プログラムをモニタする············································483
8.3.2 ファンクション内部をモニタする ·····························484
8.3.3 ファンクションブロック内部をモニタする···············485
8.3.4 オンラインでフォースをかける·································485
8.3.5 オンラインでスワップする ········································489
8.3.6 シーケンスタグを操作する ········································491
8.3.7 モニターのモードを選択する ····································495
8.4 プログラムといっしょにデータをモニタする··················500
8.5 任意のデータをモニタする··················································501
8.6 複数のタスクを同時にモニタする······································502
8.7 プログラムモニタを外部から起動する······························506
8.8 プログラムの空き容量を知る··············································509
8.9 プログラムやデータファイルを比較する··························512
8.10 データをトレースする··························································520
8.11 I/O 入力点にフォースをかける ········································527

ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 vii
第 9 章
nv シリーズの システムの モニタと保守
…529
9.1 コントローラ内のプログラム登録を確認する··················530
9.2 コントローラ内のパラメータを確認する··························533
9.3 コントローラの状態をモニタする······································535
9.4 I/O ループの状態をモニタする ········································538
9.5 I/O モジュールの状態をモニタする ································547
9.6 メインモジュールのログを取得する··································551
9.7 I/O モジュールのログを取得する ····································554
9.8 LAN の管理情報をモニタする············································556
9.9 さまざまなメンテナンス機能··············································560
9.9.1 時刻設定 ·····································································560
9.9.2 運転状態の切り替え ···················································561
9.9.3 二重化の切り替え·······················································563
9.9.4 受信系の切り替え·······················································564
9.9.5 メモリクリア ······························································565
9.9.6 デフラグ ·····································································566
9.9.7 バックアップ/リストア············································567
9.10 RAS の画面を外部から起動する········································568
第 10 章
V シリーズの システムの モニタと保守
…571
10.1 コントローラ内のプログラム登録を確認する··················572
10.2 コントローラ内のパラメータを確認する··························575
10.3 コントローラの状態をモニタする······································577
10.4 パラレル I/O 状態をモニタする ·······································581
10.5 シリアル I/O 状態をモニタする ·······································586
10.6 メインモジュールのログを取得する··································592
10.7 I/O モジュールのログを取得する ····································596
10.8 LAN の管理情報をモニタする············································599
10.9 さまざまなメンテナンス機能··············································610
10.9.1 時刻設定 ·····································································611
10.9.2 運転状態の切り替え ···················································612
10.9.3 二重化の切り替え·······················································614
10.9.4 受信系の切り替え·······················································615
10.9.5 メモリクリア ······························································616
10.9.6 デフラグ ·····································································617
10.9.7 バックアップ/リストア············································618
10.9.8 FROM 書き込み··························································619
10.9.9 FROM 読み出し··························································620
10.9.10 出力リセット解除·······················································621
10.9.11 リードバック異常リセット ···············································622
10.9.12 I/O 活線着脱の設定 ··················································623
10.10 RAS の画面を外部から起動する········································625

6E8C4890 viii
第 11 章
ツールの保守
…629
11.1 ユーザシステムのインポート/エクスポートを実行する···630
11.2 ライブラリのインポート/エクスポートを実行する ·····633
11.3 テキスト形式によるインポート/エクスポートを実行する ····638
11.4 Ver.1 からプロダクトをインポートする ·························648
11.5 セミグラフィックからフルグラフィックへ一括返還する ····650
11.6 エンジニアリングログ··························································652
11.7 ログインユーザや現在の編集者を表示する······················653
第 12 章
図書の印刷
…655
12.1 ドキュメント印刷とショット印刷······································656
12.2 ページ設定··············································································657
12.3 印刷の実行··············································································667
12.4 クロスリファレンスの印刷··················································672
12.5 変数リファレンス、関数リファレンスの印刷··················677
12.6 PDF ファイルに出力する ····················································680
付録 A
メッセージ一覧
…681
付録 B
…691

1
第 1 章 nv シリーズ/V シリーズの 基礎知識 ここでは、本ツールを使うときの基礎的な流れや機能と、nv シリーズおよび、Vシリーズ
で登録できるハードウェア、およびそのソフトウェアを種別毎に説明します。
1.1 エンジニアリングの流れ ·································································3
1.2 nv シリーズ/V シリーズのハードウェアモデル ··························6
1.2.1 システム構成······································································8
1.2.2 ステーション構成 ······························································16
1.3 nv シリーズ/V シリーズのソフトウェアモデル ························48
1.3.1 タスク···············································································49
1.3.2 タスクエントリ ································································50
1.3.3 プログラム ·······································································51
1.3.4 ファンクションブロック ·················································54
1.3.5 ファンクション ································································57
1.3.6 変数とデータ型 ································································63
1.3.7 データ型定義····································································67
1.3.8 標準のデータ型宣言·························································70
1.3.9 識別子···············································································72
1.3.10 プログラミング言語·························································73
1.3.11 ラダー・ダイヤグラム(LD)···········································74
1.3.12 ファンクション・ブロック・ダイヤグラム(FBD) ·······75
1.3.13 シーケンシャル・ファンクション・チャート(SFC)····76
1.3.14 ストラクチャード・テキスト(ST)································77
1.3.15 グラフィカル言語の制約 ·················································81

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 2
1.3.16 制御文の使い方 ································································89
1.3.17 グラフィカル言語の実行順··············································98
1.3.18 コントローラ変数 ··························································100
1.3.19 I/O 変数 ········································································103
1.3.20 ステーション変数 ··························································108
1.3.21 ネットワーク変数 ·························································· 110
1.3.22 コンフィグレーション ··················································· 112

1.1 エンジニアリングの流れ
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 3
1.1 エンジニアリングの流れ
本ツールは、nv シリーズおよび、Vシリーズの設計・製造・試験・調整・保守の各
場面で利用することができます。ここでは、本ツールを使ったエンジニアリングの流れ
とツール機能の役割を説明します。
<エンジニアリングの流れ>
ハードウェアの登録
I/O シンボル・TAG の作成 制御プログラムの作成
プログラムのモニタ データのモニタシステムのモニタ・保守
ダウンロード
プロダクトツリー
変数プログラム・エディタ モジュールパラメータ
システムビュー
システムログ
SIO ログ
制御パラメータの設定
図書の印刷
ユーザの登録プロダクトマネージャ
ツールの保守
インポート/エクスポート ドキュメント印刷
TAG・エディタTAG エディタ
Ver.1 インポート
ダウンロード
各種変数
データービュー
■ユーザの登録
ツールのシステム管理者がツールの使用者とパスワードを登録します。これは「プロダ
クトマネージャ」で行います。登録後は、登録されたユーザのみがツールにログインで
きるように制限されます。
■ハードウェアの登録
nv シリーズおよび、Vシリーズのシステム、ステーション、コントローラを登録しま
す。ステーションレベルでは、I/O モジュールの構成や各種ハードウェアのパラメータ
を設定します。システムレベルでは、ネットワークで複数のノードを接続します。これ
は「プロダクトツリー」で行います。
■I/O シンボル・TAG の作成
プロセス I/O 信号や伝送上のスキャンデータに名前(変数名)を付けます。また、事
前に用意された TAG パラメータの TAGNo を登録します。これらの名前は、プログラ
ム上で変数として使用できるようになります。これは「変数」または「TAGエデイタ」
で行います。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 4
■制御プログラムの作成
コントローラのタスクエントリ No 毎に、制御プログラムを作成し、保存します。LD
(ラダー・ダイヤグラム)、FBD(ファンクションブロック・ダイヤグラム)、SFC(シ
ーケンシャル・ファンクションチャート)のグラフィカル言語を混在して使用できます。
■制御パラメータの作成
各種パラメータや TAG(=グローバル変数)に初期設定値を登録します。これは、「モ
ジュールパラメータ」や「TAG エディタ」で行います。
■ダウンロード
コントローラにコンフィグレーション、グローバル変数、プログラムをダウンロードし
ます。コントローラに対して一括でダウンロードするには「ダウンロード」で行います。
プログラム毎に個別にダウンロードするには、「プログラムエディタ」で行います。
■システムのモニタ・保守
ダウンロード後、Vシリーズのネットワーク、ステーション、コントローラ、I/O の動
作状態をモニタできます。またダウンロードしたタスクの動作状態や制御周期をモニタ
することができます。コントローラ内に記録されたログをモニタすることもできます。
また RUN/HALT などの運転状態を切り替えしたり、コントローラ内のデータやコー
ドをバックアップ・リストアする等のメンテナンスを行うことができます。これらは、
「システムビュー」で行います。
■プログラムのモニタ
ダウンロードしたプログラムはそのグラフィック言語のまま、オンラインモニタするこ
とができます。LD のパワーフロー、FBD のモニタ値、SFC のアクティブステップをリ
フレッシュ表示します。プログラムモニタしながら、プログラム内の変数の値を変更す
ることもできます。これは、「プログラムエディタ」で行います。
■データのモニタ
各種「変数」でオンラインモニタ、データ設定ができます。TAG は、専用の「TAG エデ
ィタ」でオンラインモニタ、データ設定ができます。「データビュー」を使用すると注目し
たい変数だけを登録して、いつでもオンラインモニタ、データ設定が可能になります。
■ツールの保守
本ツールは、外部とのデータのやりとりを CSV 形式のファイルや独自の形式によって
行うことができます。これは、「インポート/エクスポート」を使って行います。Ver.1
のエンジニアリングツールのデータを Ver.2,Ver.3,Ver.4 のツールで使用するには、
「Ver.1 インポート」でデータを変換します。

1.1 エンジニアリングの流れ
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 5
■図書の印刷
ハード構成、プログラム、パラメータなどは図書として、まとめて印刷することができ
ます。これは、「ドキュメント印刷」で行います。
第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 6
1.2 nv シリーズ/V シリーズのハードウェアモデル
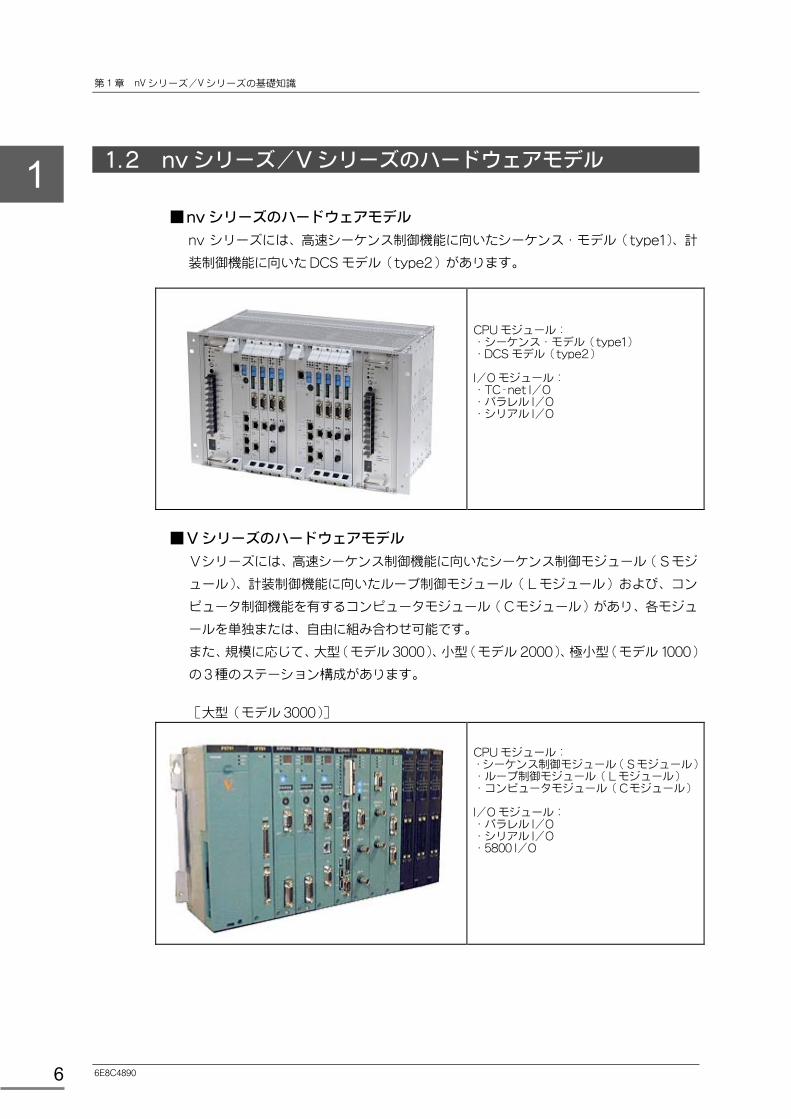
■ nv シリーズのハードウェアモデル
nv シリーズには、高速シーケンス制御機能に向いたシーケンス・モデル(type1)、計
装制御機能に向いた DCS モデル(type2)があります。
CPU モジュール: ・シーケンス・モデル(type1) ・DCS モデル(type2) I/O モジュール: ・TC-net I/O ・パラレル I/O ・シリアル I/O
■ V シリーズのハードウェアモデル
Vシリーズには、高速シーケンス制御機能に向いたシーケンス制御モジュール(Sモジ
ュール)、計装制御機能に向いたループ制御モジュール(Lモジュール)および、コン
ピュータ制御機能を有するコンピュータモジュール(Cモジュール)があり、各モジュ
ールを単独または、自由に組み合わせ可能です。
また、規模に応じて、大型(モデル 3000)、小型(モデル 2000)、極小型(モデル 1000)
の3種のステーション構成があります。
[大型(モデル 3000)]
CPU モジュール: ・シーケンス制御モジュール(Sモジュール)・ループ制御モジュール(Lモジュール) ・コンピュータモジュール(Cモジュール) I/O モジュール: ・パラレル I/O ・シリアル I/O ・5800 I/O

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 7
[小型(モデル 2000)]
CPU モジュール: ・シーケンス制御モジュール(Sモジュール)・ループ制御モジュール(Lモジュール) ・コンピュータモジュール(Cモジュール) I/O モジュール: ・パラレル I/O ・シリアル I/O
[極小型(モデル 1000)]
CPU モジュール: ・ループ制御モジュール(Lモジュール) I/O モジュール: ・シリアル I/O

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 8
1.2.1 システム構成
システムは、複数のネットワーク、ステーションで構成されます。
nv シリーズのネットワークには、Ethernet、TC-net100、FL-net、MODBUS 等
を使用し、各ステーションまたは、フィールド機器を接続します。
Vシリーズのネットワークには、Ethernet(10BASE2/10BASE5)、TC-net、
TOSLINE-S20、DeviceNet、Profibus、ADMAP-5M 等を使用し、各ステーション
または、フィールド機器を接続します。
システム構成の概略図を下記に示します。(以下は、V シリーズの例)
V
V
大型(モデル 3000)小型(モデル 2000) 極小型(モデル 1000)
大型(モデル 3000)小型(モデル 2000)
Ethernet
TC-net 10
TOSLINE-S20
DeviceNet
フィールド機器
極小型(モデル 1000)
V
V
OIS エンジニアリングツール
○補足
・ ネットワークの詳細については、ネットワークカードの取扱説明書をご覧ください。

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 9
1.2.1.1 ネットワーク
ネットワークは、複数のノード(伝送局)を接続するひとつのネットワークセグメン
トを指します。
ネットワークには、大きく分けて次の3階層のレベルがあります。
・監視用ネットワーク
・制御用ネットワーク
・フィールド機器用ネットワーク
■制約事項
エンジニアリングツールがサポートする機器について、制約がある場合が有ります。セ
ットアップに添付されている ReadMe.TXT ファイルを参照して 新の情報を確認し
てください。
■監視用ネットワーク
プロセス監視装置(OIS 等)と nv シリーズおよび、Vシリーズのステーションを接続
します。
プロセス監視装置とコントローラ間のデータ伝送用です。
名称 説明
EtherLAN Ethernet LAN (シングル)
EtherLANDouble Ethernet LAN (2 重化)
■制御用ネットワーク
nv シリーズおよび、V シリーズのステーション同士を接続します。
コントローラ間の高速伝送用です。
名称 説明
S20LAN TOSLINE-S20 LAN
S20LoopLAN TOSLINE-S20-Loop LAN
TC-net 10LAN TC-net 10 LAN (シングル)
TC-net 20LAN TC-net 20 LAN
TC-net 10LANd TC-net 10 LAN (2 重化)
TC-net 100LAN TC-net 100 LAN (シングル)
TC-net 100LANd TC-net 100 LAN (2 重化)
FL-netLAN FL-net LAN
FL-netControlLAN FL-net Control LAN
ADMAP-5MLAN ADMAP-5M LAN
ADMAP-100FLAN ADMAP-100F LAN
※FL-netLAN と FL-netControlLAN は、どちらも FL-net(OPCN-2)用のネットワークです。 ただし、それぞれに対して本ツールで登録可能なノードには制限があります。詳細は、「1.2.1.2 ノード」を参照してください。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 10
■ フィールド機器用ネットワーク
フィールド機器とコントローラを接続します。
名称 説明
DevicenetLAN Devicenet LAN
ProfibusLAN Profibus LAN
T_EthernetLAN T シリーズ Ethernet LAN
F10LAN TL-F10 LAN
TL-30LAN TL-30 LAN
TL-100LAN TL-100 LAN
TL-1000LAN TL-1000 LAN
ModbusLANm Modbus LAN (マスタ用)
ModbusLANs Modbus LAN (スレーブ用)
1.2.1.2 ノード
ノードは、ネットワークに接続される伝送局を指します。
各階層のネットワークに接続されるノードを下記に示します。
■制約事項
エンジニアリングツールがサポートする機器について、制約がある場合が有ります。セ
ットアップに添付されている ReadMe.TXT ファイルを参照して 新の情報を確認し
てください。
■監視用ネットワーク
<EtherLAN、EtherLANDouble>
[nv シリーズ]
名称 説明
EN811 Ethernet GB/100MB 電気シングル
EN812 Ethernet GB/100MB TOSMAP-DS 接続 電気二重
EN821 Ethernet GB/100MB 光シングル
FN812 Ethernet GB/100MB OIS-DS 接続 電気二重
[大型(モデル 3000)]
名称 説明
EN711 Ethernet LAN カード 10BASE5 シングルバス用
EN721 Ethernet LAN カード 10BASE5 2 重化バス用
EN731 Ethernet LAN カード 10BASE2 シングルバス用
EN741 Ethernet LAN カード 10BASE2 2 重化バス用
EN751 FastEthernet LAN カード シングル
EN761 FastEthernet LAN カード 2 重化
FN711 Ethernet カード DS 接続

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 11
[小型(モデル 2000)]
名称 説明
EN611 Ethernet LAN カード 10BASE5 シングルバス用
EN621 Ethernet LAN カード 10BASE5 2 重化バス用
EN631 Ethernet LAN カード 10BASE2 シングルバス用
EN641 Ethernet LAN カード 10BASE2 2 重化バス用
EN651 FastEthernet LAN カード シングル
EN661 FastEthernet LAN カード 2 重化
FN611 Ethernet カード DS 接続
[極小型(モデル 1000)]
名称 説明
EN531 Ethernet LAN カード L1 用
[その他]
名称 説明
ENGW-5654 TL-8000 メッセージゲートウェイ
FMGW1 MDWS/TC-net ゲートウェイ
■制御用ネットワーク
<S20LAN>
[大型(モデル 3000)]
名称 説明
SN321 G3 I/O S20 ステーション 同軸方式
SN322A G3 I/O S20 ステーション 光方式
SN323 G3 I/O S20 ステーション 同軸/光方式
[小型(モデル 2000)]
名称 説明
SN621 G2 I/O TL-S20 同軸方式
SN622 G2 I/O TL-S20 光伝送方式
SN221 G2 I/O TL-S20 同軸方式
SN222A G2 I/O TL-S20 光伝送方式
<S20LoopLAN>
[大型(モデル 3000)]
名称 説明
SN325 G3 I/O TL-S20LP ステーション 光ループ方式
[極小型(モデル 1000)]
名称 説明
L1PU12 L1-type2 TL-S20LP 接続
第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 12
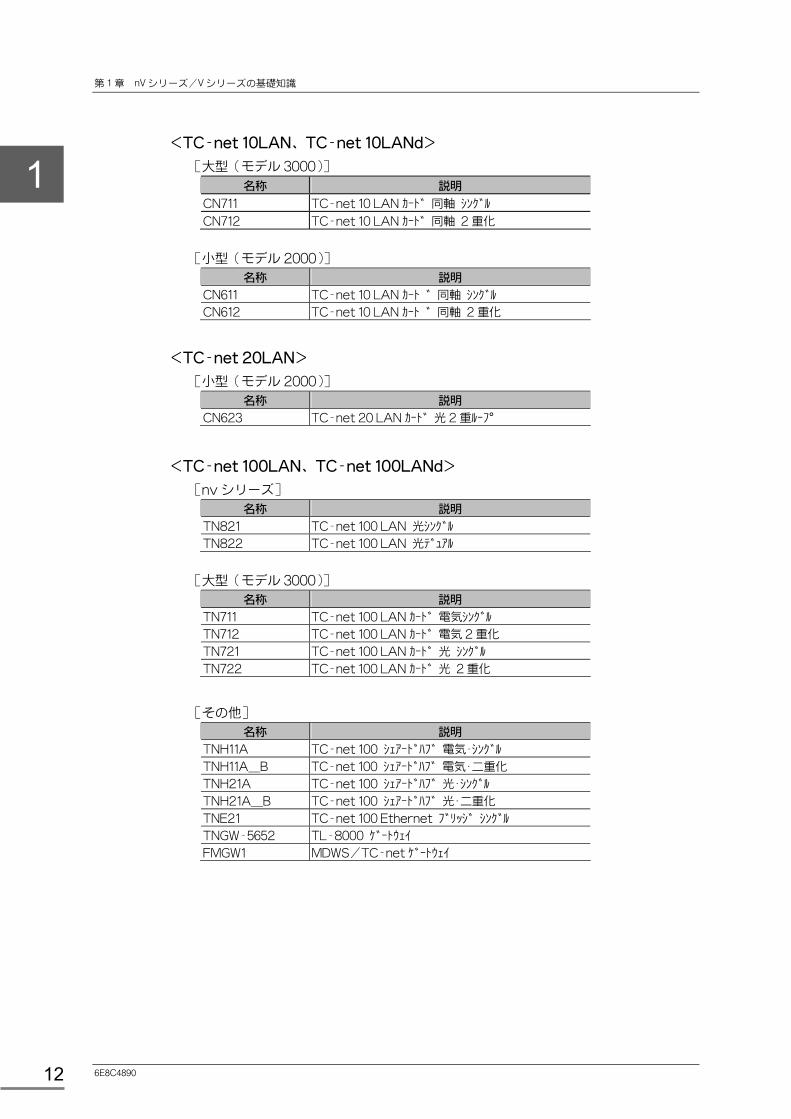
<TC-net 10LAN、TC-net 10LANd>
[大型(モデル 3000)]
名称 説明
CN711 TC-net 10 LAN カード 同軸 シングル
CN712 TC-net 10 LAN カード 同軸 2 重化
[小型(モデル 2000)]
名称 説明
CN611 TC-net 10 LAN カート ゙ 同軸 シングル
CN612 TC-net 10 LAN カート ゙ 同軸 2 重化
<TC-net 20LAN>
[小型(モデル 2000)]
名称 説明
CN623 TC-net 20 LAN カード 光 2 重ループ
<TC-net 100LAN、TC-net 100LANd>
[nv シリーズ]
名称 説明
TN821 TC-net 100 LAN 光シングル
TN822 TC-net 100 LAN 光デュアル
[大型(モデル 3000)]
名称 説明
TN711 TC-net 100 LAN カード 電気シングル
TN712 TC-net 100 LAN カード 電気 2 重化
TN721 TC-net 100 LAN カード 光 シングル
TN722 TC-net 100 LAN カード 光 2 重化
[その他]
名称 説明
TNH11A TC-net 100 シェアードハブ 電気・シングル
TNH11A_B TC-net 100 シェアードハブ 電気・二重化
TNH21A TC-net 100 シェアードハブ 光・シングル
TNH21A_B TC-net 100 シェアードハブ 光・二重化
TNE21 TC-net 100 Ethernet ブリッジ シングル
TNGW-5652 TL-8000 ゲートウェイ
FMGW1 MDWS/TC-net ゲートウェイ

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 13
<FL-net LAN>
[nv シリーズ]
名称 説明
FL911 FL-net モジュール
[大型(モデル 3000)]
名称 説明
FL311 G3 I/O FL-net モジュール(Ver1.00)
FL312 G3 I/O FL-net モジュール(Ver2.00)
[小型(モデル 2000)]
名称 説明
FL611 G2 I/O FL-net モジュール(Ver1.00)
FL612 G2 I/O FL-net モジュール(Ver2.00)
FL211 G2 I/O FL-net モジュール(Ver1.00)
FL212 G2 I/O FL-net モジュール(Ver2.00)
※上記以外(FL754 など)のノードを接続する場合には、other station 用のノードを使用します。
<FL-net Control LAN>
[大型(モデル 3000)]
名称 説明
FL754 FL-net G3 リモート I/O ステーション
[小型(モデル 2000)]
名称 説明
FL654 FL-net G2 リモート I/O ステーション
※上記以外(FL312 など)のノードを接続する場合には、other station 用のノードを使用します。
※コントローラ配下の FL-net モジュールと FL-net リモート I/O を、物理的に同一ネットワーク上に接続する場合で、かつ FL-net リモート I/O の登録を本ツールで行う場合には、以下の登録が必要となります。 1)FL-netLAN と FL-netControlLAN の2つのネットワークを登録する。 2)それぞれのネットワークにおいて、相手局は other station 用のノードとして登録する。
<ADMAP-5MLAN>
[大型(モデル 3000)]
名称 説明
AN712 ADMAP-5M カード
<ADMAP-100FLAN>
[大型(モデル 3000)]
名称 説明
AN777 ADMAP-100F インタフェースモジュール

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 14
■フィールド機器用ネットワーク
<DevicenetLAN>
[大型(モデル 3000)]
名称 説明
DN311 G3 I/O デバイスネット マスタ
[小型(モデル 2000)]
名称 説明
DN611 G2 I/O デバイスネット マスタ
DN211 G2 I/O デバイスネット マスタ
<F10LAN>
[大型(モデル 3000)]
名称 説明
MS311 G3 I/O TL-F10 マスタモジュール
MS321-128 G3 I/O TL-F10M マスタモジュール 128 ワード型
MS321-256 G3 I/O TL-F10M マスタモジュール 256 ワード型
MS321-32 G3 I/O TL-F10M マスタモジュール 32 ワード型
MS321-64 G3 I/O TL-F10M マスタモジュール 64 ワード型
MS331 G3 I/O TL-F10L マスタモジュール
RS311 G3 I/O TL-F10 スレーブモジュール
[小型(モデル 2000)]
名称 説明
UN611 G2 I/O TL-F10 マスタモジュール
UN612 G2 I/O TL-F10 スレーブモジュール
MS211 G2 I/O TL-F10 マスタスモジュール
RS211 G2 I/O TL-F10 スレーブモジュール
<TL-30LAN>
名称 説明
LK611 G2 I/O TOSLINE-30 ツイストペアケーブル方式
LK612 G2 I/O TOSLINE-30 光伝送方式
LK11 G2 I/O TOSLINE-30 ツイストペアケーブル方式
LK12 G2 I/O TOSLINE-30 光伝送方式
TL30_X TOSLINE-30 ステーション
<TL-100LAN>
名称 説明
TL100_X TOSLINE-100 ステーション
<TL-1000LAN>
名称 説明
TL1000_X TOSLINE-1000 ステーション

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 15
<ProfibusLAN>
[大型(モデル 3000)]
名称 説明
PF311 G3 I/O PROFIBUS-DP マスタモジュール
PF312 G3 I/O PROFIBUS-DP スレーブモジュール
[小型(モデル 2000)]
名称 説明
PF611 G2 I/O PROFIBUS-DP マスタモジュール
PF612 G2 I/O PROFIBUS-DP スレーブモジュール
<ModbusLANm>
[nv シリーズ]
名称 説明
MD911-M MODBUS-RTU モジュール (マスタ用)
<ModbusLANs>
[nv シリーズ]
名称 説明
MD911-S MODBUS-RTU モジュール (スレーブ用)

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 16
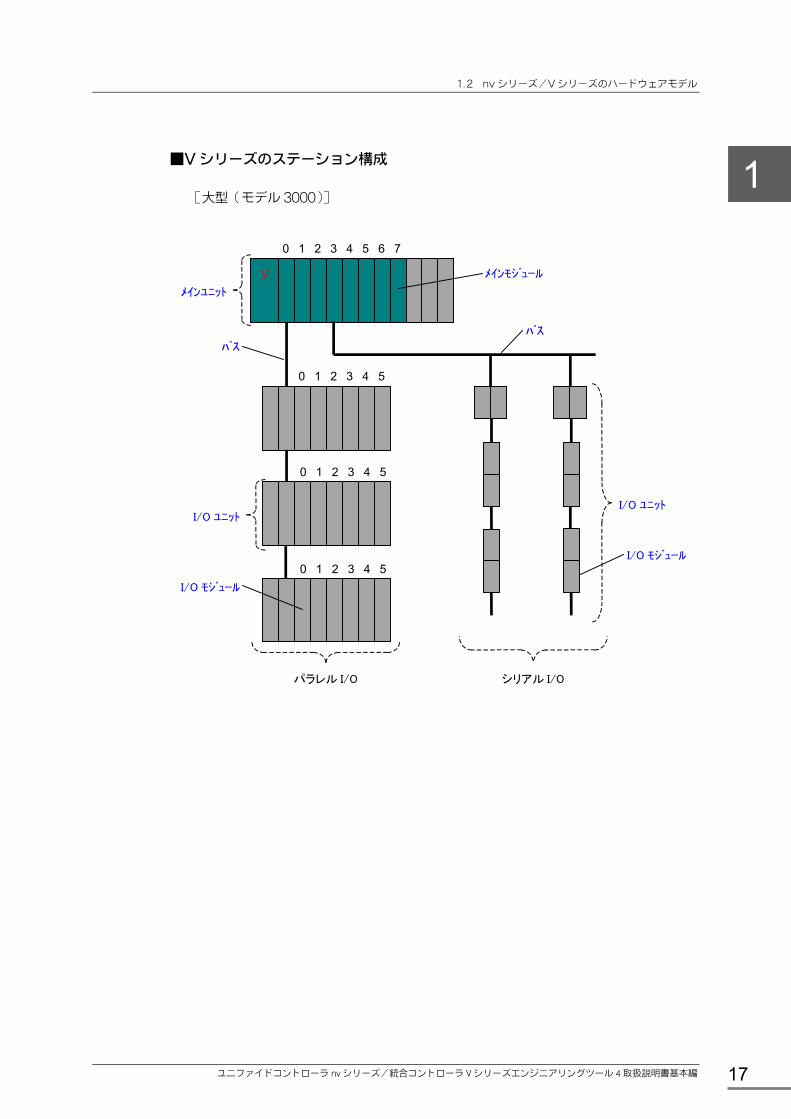
1.2.2 ステーション構成
ステーションは、ひとつのメインユニットおよびそれと接続されるメインモジュール、
バス、I/O ユニット、I/O モジュールで構成されます。
I/O モジュールとしては、パラレルI/O、シリアルI/Oがあります。
各モデル毎にステーション構成の概略図を示します。
● nv シリーズのステーション構成
メインユニット
I/O ノード
メインモジュール
I/O ユニット
I/O モジュール
0 1 2 3 4 5 6 7
I/O ループ
I/O ユニット
I/O モジュール
0 1 2 3 4 5
0 1 2 3 4 5
パラレル I/OTC-net I/O
I/O ノード
1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 17
■V シリーズのステーション構成
[大型(モデル 3000)]
V
メインユニット
バス
バス
メインモジュール
I/O ユニットI/O ユニット
I/O モジュール
I/O モジュール
0 1 2 3 4 5 6 7
0 1 2 3 4 5
0 1 2 3 4 5
0 1 2 3 4 5
パラレル I/O シリアル I/O

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 18
[小型(モデル 2000)]
メインユニット
バス
バス
メインモジュール
I/O ユニットI/O ユニット
I/O モジュールI/O モジュール
0 1 2
0 1 2 3 4 5
0 1 2 3 4 5
0 1 2 3 4 5
パラレル I/O シリアル I/O
V
[極小型(モデル 1000)]
メインユニット
メインモジュールI/O ユニット
I/O モジュール0 0 1 2 3 14 15
○補足
・ メインユニット、メインモジュールの詳細については、コントローラの取扱説明書をご覧くだ
さい。
・ バス、I/O ユニット、I/O モジュールの詳細については、I/O カードの取扱説明書をご覧くだ
さい。

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 19
■ 2重化の考え方
2重化は、ツール上では「2重化用のモジュールを選択する」という方式を取ります。
そのため、同じモジュールを2回設定することなくステーション構成の登録ができます。
<メインユニット(2重化用)>
0 1 2 3 3 2 1 0
網掛け部分を登録
電源
<メインユニット(2台2重化)>
網掛け部分を登録
電源
0 1 2 3 4 5 6 7 8 9 10 0 1 2 3 4 5 6 7 8 9 10
電源
<パラレル I/O ユニット(バスインタフェース2重化)>
網掛け部分を登録
インタフェース
0 1 2 3 4 5 6 7 8 9
<シリアル I/O ユニット(バスインタフェース2重化)>
網掛け部分を登録
インタフェース
1
14
第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 20
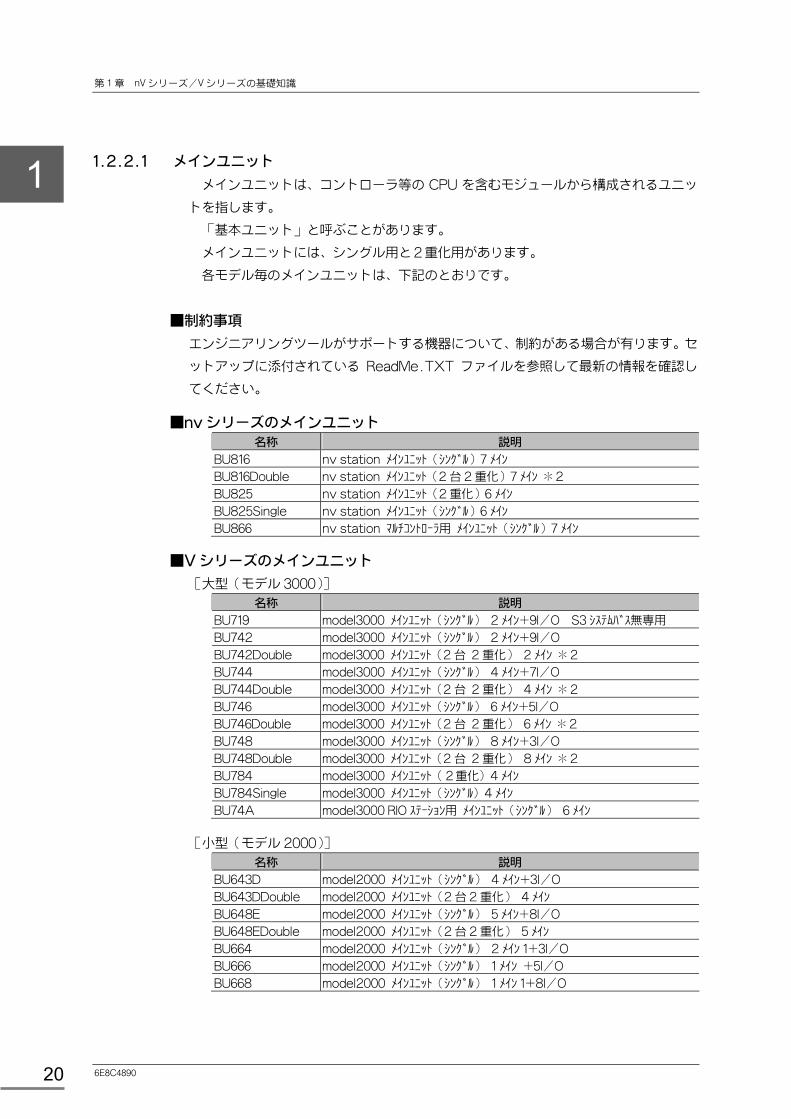
1.2.2.1 メインユニット
メインユニットは、コントローラ等の CPU を含むモジュールから構成されるユニッ
トを指します。
「基本ユニット」と呼ぶことがあります。
メインユニットには、シングル用と2重化用があります。
各モデル毎のメインユニットは、下記のとおりです。
■制約事項
エンジニアリングツールがサポートする機器について、制約がある場合が有ります。セ
ットアップに添付されている ReadMe.TXT ファイルを参照して 新の情報を確認し
てください。
■nv シリーズのメインユニット 名称 説明
BU816 nv station メインユニット(シングル)7 メイン
BU816Double nv station メインユニット(2 台 2 重化)7 メイン * 2
BU825 nv station メインユニット(2 重化)6 メイン
BU825Single nv station メインユニット(シングル)6 メイン
BU866 nv station マルチコントローラ用 メインユニット(シングル)7 メイン
■V シリーズのメインユニット
[大型(モデル 3000)]
名称 説明
BU719 model3000 メインユニット(シングル) 2 メイン+9I/O S3 システムバス無専用
BU742 model3000 メインユニット(シングル) 2 メイン+9I/O
BU742Double model3000 メインユニット(2 台 2 重化) 2 メイン * 2
BU744 model3000 メインユニット(シングル) 4 メイン+7I/O
BU744Double model3000 メインユニット(2 台 2 重化) 4 メイン * 2
BU746 model3000 メインユニット(シングル) 6 メイン+5I/O
BU746Double model3000 メインユニット(2 台 2 重化) 6 メイン * 2
BU748 model3000 メインユニット(シングル) 8 メイン+3I/O
BU748Double model3000 メインユニット(2 台 2 重化) 8 メイン * 2
BU784 model3000 メインユニット(2重化) 4 メイン
BU784Single model3000 メインユニット(シングル) 4 メイン
BU74A model3000 RIO ステーション用 メインユニット(シングル) 6 メイン
[小型(モデル 2000)]
名称 説明
BU643D model2000 メインユニット(シングル) 4 メイン+3I/O
BU643DDouble model2000 メインユニット(2 台 2 重化) 4 メイン
BU648E model2000 メインユニット(シングル) 5 メイン+8I/O
BU648EDouble model2000 メインユニット(2 台 2 重化) 5 メイン
BU664 model2000 メインユニット(シングル) 2 メイン 1+3I/O
BU666 model2000 メインユニット(シングル) 1 メイン +5I/O
BU668 model2000 メインユニット(シングル) 1 メイン 1+8I/O

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 21
[極小型(モデル 1000)]
名称 説明
MainUnit11 model1000 メインユニット L1PU11/L1LG11 用
MainUnit12 model1000 メインユニット L1PU12/LC 用
■その他のメインユニット 名称 説明
ANStn ADMAP ステーションユニット
DNStn DeviceNet ステーションユニット
F10Stn F10 ステーションユニット
FLStn FL-net ステーションユニット
PFStn Profibus ステーションユニット
SNStn S20 ステーションユニット
TL30Stn TL-30 ステーションユニット
TL100Stn TL-100 ステーションユニット
TL1000Stn TL-1000 ステーションユニット
TL8000GWStn TL-8000 ゲートウェイ ステーションユニット
TNHub TC-net100 ハブユニット
TNStn TC-net100 ステーションユニット
FMGWStn MDWS/TC-net ゲートウェイ ステーションユニット

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 22
1.2.2.2 メインモジュール
メインモジュールは、メインユニットに含まれるコントローラ等のモジュールを指し
ます。
大型の G3I/O モジュールおよび、小型の G2I/O モジュールは、I/O ユニットだけ
でなく、メインユニットに接続することができるので、この場合、ツール上は「メイン
モジュール」として扱われます。
各モデルのメインユニット毎に登録できるメインモジュールは、下記のとおりです。
■制約事項
エンジニアリングツールがサポートする機器について、制約がある場合が有ります。セ
ットアップに添付されている ReadMe.TXT ファイルを参照して 新の情報を確認し
てください。
■nv シリーズのメインモジュール
BU816、BU816Double、BU825、BU825Single
名称 説明
PU811 ユニファイドコントローラ type1 256KS シーケンス・モデル
PU821 ユニファイドコントローラ type2 512KS DCS モデル
PU871 ユニファイド コントローラ type2(再処理) 512KS
EN811 Ethernet GB/100MB 電気シングル
EN812 Ethernet GB/100MB TOSMAP-DS 接続 電気二重
EN821 Ethernet GB/100MB 光シングル
FN812 Ethernet GB/100MB OIS-DS 接続 電気二重
FN862 Ethernet GB/100MB OIS-DS 接続(再処理)
TN821 TC-net 100 LAN 光シングル
TN822 TC-net 100 LAN 光デュアル
BU866
名称 説明
PU866 ユニファイド コントローラ type1(マルチ) 256KS
EN811 Ethernet GB/100MB 電気シングル
EN821 Ethernet GB/100MB 光シングル
TN821 TC-net 100 LAN 光シングル
TN822 TC-net 100 LAN 光デュアル

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 23
■V シリーズのメインモジュール
[大型(モデル 3000)]
BU742、BU742Double、BU744、BU744Double、BU746、BU746Double、BU748、
BU748Double、BU784
名称 説明
C3PU11 C3 RS3 8MB
C3PU22 C3 NT(日本語) 64MB, Hard Disk 4.8GB, PCMCIA 2
C3PU23 C3 NT(日本語) 128MB Hard Disk 4.8GB, PCMCIA 2
C3PU35 C3 コントローラ (高速版)
C3PU62 C3 NT(英語) 64MB, Hard Disk 4.8GB, PCMCIA 2
C3PU63 C3 NT(英語) 128MB Hard Disk 4.8GB, PCMCIA 2
CN711 TC-net 10 LAN カード 同軸 シングル
CN712 TC-net 10 LAN カード 同軸 2 重化
EN711 Ethernet LAN カード 10BASE5 シングルバス用
EN721 Ethernet LAN カード 10BASE5 2 重化バス用
EN731 Ethernet LAN カード 10BASE2 シングルバス用
EN741 Ethernet LAN カード 10BASE2 2 重化バス用
EN751 FastEthernet LAN カード シングル
EN761 FastEthernet LAN カード 2 重化
FN711 Ethernet カード DS 接続
IF719 DU3 G3I/O インタフェースなし
IF721 PIF G3I/O インタフェース 2 バス
IF728 DU3 G3I/O インタフェース 2 バス付き
IF735 SIF シリアル I/O インタフェース 3 バス
IF741 PIF G3I/O インタフェース 4 バス
IF748 DU3 G3I/O インタフェース 4 バス付き
L3PU11 L3-type1 MCS 型
L3PU21 L3-type2 DS 型
S3PU45 S3-type3 112kS 64kW
S3PU55 S3-type1 112kS 128kW
S3PU65 S3-type5 112kS 128kW 2 重化
TS711 GPS インタフェース
TN711 TC-net 100 LAN カード 電気シングル
TN712 TC-net 100 LAN カード 電気 2 重化
TN721 TC-net 100 LAN カード 光シングル
TN722 TC-net 100 LAN カード 光 2 重化
AN712 ADMAP-5M カード
AN777 ADMAP-100F インタフェースモジュール
※2重化システムの場合は、メインユニットにI/Oモジュールを登録することができません。
BU742
名称 説明
FL754 FL-net G3 リモート I/O ステーション
※上記の他に G3I/O モジュールの登録も可能です。
第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 24
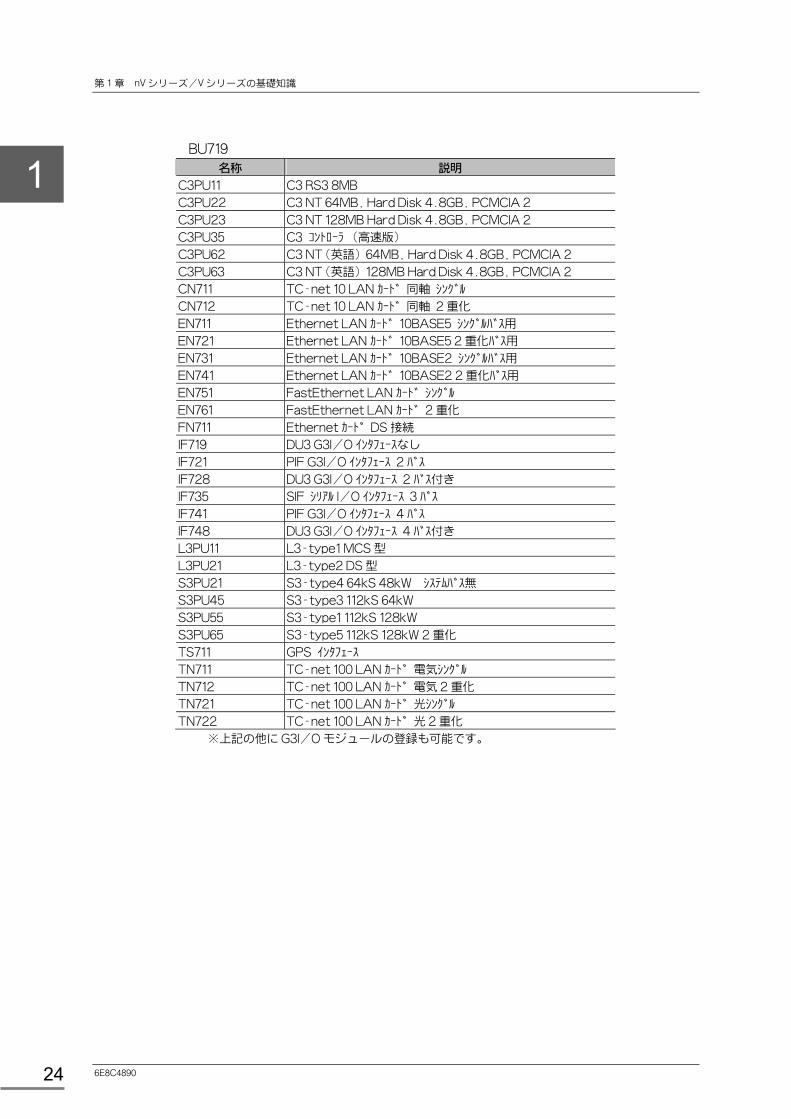
BU719
名称 説明
C3PU11 C3 RS3 8MB
C3PU22 C3 NT 64MB, Hard Disk 4.8GB, PCMCIA 2
C3PU23 C3 NT 128MB Hard Disk 4.8GB, PCMCIA 2
C3PU35 C3 コントローラ (高速版)
C3PU62 C3 NT(英語) 64MB, Hard Disk 4.8GB, PCMCIA 2
C3PU63 C3 NT(英語) 128MB Hard Disk 4.8GB, PCMCIA 2
CN711 TC-net 10 LAN カード 同軸 シングル
CN712 TC-net 10 LAN カード 同軸 2 重化
EN711 Ethernet LAN カード 10BASE5 シングルバス用
EN721 Ethernet LAN カード 10BASE5 2 重化バス用
EN731 Ethernet LAN カード 10BASE2 シングルバス用
EN741 Ethernet LAN カード 10BASE2 2 重化バス用
EN751 FastEthernet LAN カード シングル
EN761 FastEthernet LAN カード 2 重化
FN711 Ethernet カード DS 接続
IF719 DU3 G3I/O インタフェースなし
IF721 PIF G3I/O インタフェース 2 バス
IF728 DU3 G3I/O インタフェース 2 バス付き
IF735 SIF シリアル I/O インタフェース 3 バス
IF741 PIF G3I/O インタフェース 4 バス
IF748 DU3 G3I/O インタフェース 4 バス付き
L3PU11 L3-type1 MCS 型
L3PU21 L3-type2 DS 型
S3PU21 S3-type4 64kS 48kW システムバス無
S3PU45 S3-type3 112kS 64kW
S3PU55 S3-type1 112kS 128kW
S3PU65 S3-type5 112kS 128kW 2 重化
TS711 GPS インタフェース
TN711 TC-net 100 LAN カード 電気シングル
TN712 TC-net 100 LAN カード 電気 2 重化
TN721 TC-net 100 LAN カード 光シングル
TN722 TC-net 100 LAN カード 光 2 重化
※上記の他に G3I/O モジュールの登録も可能です。

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 25
BU74A
名称 説明
C3PU11 C3 RS3 8MB
C3PU22 C3 NT 64MB, Hard Disk 4.8GB, PCMCIA 2
C3PU23 C3 NT 128MB Hard Disk 4.8GB, PCMCIA 2
C3PU35 C3 コントローラ (高速版)
C3PU62 C3 NT(英語) 64MB, Hard Disk 4.8GB, PCMCIA 2
C3PU63 C3 NT(英語) 128MB Hard Disk 4.8GB, PCMCIA 2
EN711 Ethernet LAN カード 10BASE5 シングルバス用
EN721 Ethernet LAN カード 10BASE5 2 重化バス用
EN731 Ethernet LAN カード 10BASE2 シングルバス用
EN741 Ethernet LAN カード 10BASE2 2 重化バス用
EN751 FastEthernet LAN カード シングル
EN761 FastEthernet LAN カード 2 重化
R3PU45+IF721 R3 RI/O コントローラ(G3 I/O 用)
R3PU45+IF71B R3 RI/O コントローラ(5800 I/O 用)
R3PU45+IF72C R3 RI/O コントローラ(MELPLAC I/O 用)
S3PU45 S3-type3 112kS 64kW
S3PU55 S3-type1 112kS 128kW
S3PU45+IF721 S3 コントローラ 112kS 64kW RIO ステーション用 G3 2 バス
S3PU45+IF741 S3 コントローラ 112kS 64kW RIO ステーション用 G3 4 バス
S3PU55+IF721 S3 コントローラ 112kS 128kW RIO ステーション用 G3 2 バス
S3PU55+IF741 S3 コントローラ 112kS 128kW RIO ステーション用 G3 4 バス
S3ST45A+IF721 スタンドコントローラ(STC)
TN711 TC-net 100 LAN カード 電気シングル
TN712 TC-net 100 LAN カード 電気 2 重化
TN721 TC-net 100 LAN カード 光シングル
TN722 TC-net 100 LAN カード 光 2 重化

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 26
[小型(モデル 2000)]
BU643D、BU643Ddouble、BU648E、BU648Edouble、BU664、BU666、BU668
名称 説明
C2PU11 C2 RS3 8MB
C2PU21 C2 NT(日本語) 64MB, Flash Disk 160MB
C2PU22 C2 NT(日本語) 64MB, Hard Disk 4.8GB
C2PU23 C2 NT(日本語) 128MB, Hard Disk 4.8GB, PCMCIA 2
C2PU37 C2 コントローラ (ハードディスクパック版)
C2PU61 C2 NT(英語) 64MB, Flash Disk 160MB
C2PU62 C2 NT(英語) 64MB, Hard Disk 4.8GB
C2PU63 C2 NT(英語) 128MB, Hard Disk 4.8GB, PCMCIA 2
CN611 TC-net 10 LAN カード 同軸 シングル
CN612 TC-net 10 LAN カード 同軸 2 重化
CN623 TC-net 20 LAN カード 光 2 重ループ
EN611 Ethernet LAN カード 10BASE5 シングルバス用
EN621 Ethernet LAN カード 10BASE5 2 重化バス用
EN631 Ethernet LAN カード 10BASE2 シングルバス用
EN641 Ethernet LAN カード 10BASE2 2 重化バス用
EN651 FastEthernet LAN カード シングル
EN661 FastEthernet LAN カード 2 重化
FN611 Ethernet カード DS 接続
IF617 EC バス インタフェース
IF619 DU2 Model 2000 用 二重化インタフェース
L2PU11 L2-type1 シリアル 1 バス
L2PU12 L2-type2 シリアル 3 バス
L2PU22 L2-type5 シリアル 3 バス DS 型
S2PU22 S2-type1 32Kstep システムバス無
S2PU32 S2-type4 64Kstep システムバス無
S2PU72 S2-type2 64Kstep
S2PU72D S2-type5 64Kstep 2 重化
S2PU82 S2-type3 64Kstep
※2重化システムの場合は、メインユニットにI/Oモジュールを登録することができません。
BU648E
名称 説明
CN614 G2 リモート I/O 用光伝送モジュール
R2PU72 G2 リモート I/O コントローラ
CN624 TC-net 20 LAN カード 光 2 重ループ
※上記の他に G2I/O モジュールの登録も可能です。
BU668、BU666、BU664
名称 説明
FL654 FL-net G2 リモート I/O ステーション
※上記の他に G2I/O モジュールの登録も可能です。

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 27
[極小型(モデル 1000)]
MainUnit11
名称 説明
L1PU11 L1-type1 Ethernet 対応
L1LG11 L1 ロガー
EN531 Ethernet LAN カード L1 用
MainUnit12
名称 説明
L1PU12 L1-type2 TL-S20LP 接続
LC511 ワンループ L1(電流出力)
LC512 ワンループ L1(パルス出力)
LC521 ワンループ L1(電流出力)MC バス
LC522 ワンループ L1(パルス出力)MC バス
■その他のメインモジュール
ANStn
名称 説明
AN_X ADMAP-5M ステーション
AN_Y ADMAP-100F ステーション
DNStn
名称 説明
DN_X DeviceNet ステーション
F10Stn
名称 説明
F10_X F10 ステーション
FLStn
名称 説明
FL_X FL-net ステーション
FL_Y FL-net ステーション (FLnetControlLAN 用)
PFStn
名称 説明
PF_X Profibus ステーション
SNStn
名称 説明
SN_X S20-Loop LAN カード
SN_Y S20 LAN カード
第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 28
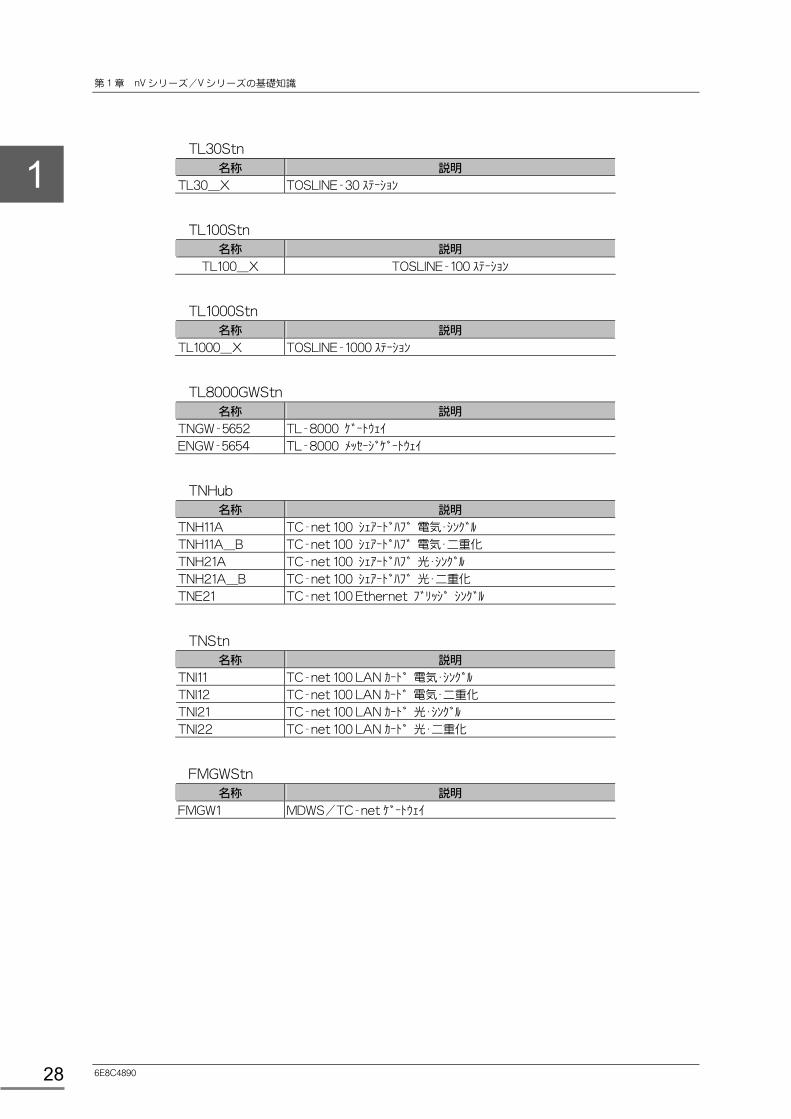
TL30Stn
名称 説明
TL30_X TOSLINE-30 ステーション
TL100Stn
名称 説明
TL100_X TOSLINE-100 ステーション
TL1000Stn
名称 説明
TL1000_X TOSLINE-1000 ステーション
TL8000GWStn
名称 説明
TNGW-5652 TL-8000 ゲートウェイ
ENGW-5654 TL-8000 メッセージゲートウェイ
TNHub
名称 説明
TNH11A TC-net 100 シェアードハブ 電気・シングル
TNH11A_B TC-net 100 シェアードハブ 電気・二重化
TNH21A TC-net 100 シェアードハブ 光・シングル
TNH21A_B TC-net 100 シェアードハブ 光・二重化
TNE21 TC-net 100 Ethernet ブリッジ シングル
TNStn
名称 説明
TNI11 TC-net 100 LAN カード 電気・シングル
TNI12 TC-net 100 LAN カード 電気・二重化
TNI21 TC-net 100 LAN カード 光・シングル
TNI22 TC-net 100 LAN カード 光・二重化
FMGWStn
名称 説明
FMGW1 MDWS/TC-net ゲートウェイ

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 29
1.2.2.3 I/O ノード/バス
nv シリーズの場合、メインモジュールと I/O モジュールの間の I/O ノードを指し
ます。
V シリーズの場合、メインモジュールから I/O ユニットへ接続するバスを指します。
バスには、パラレルバス,シリアルバス,5800 I/O バス,MELPLAC I/O バスが
あります。
メインモジュールに登録できる I/O ノードおよび、バスは、下記のとおりです。
■制約事項
エンジニアリングツールがサポートする機器について、制約がある場合が有ります。セ
ットアップに添付されている ReadMe.TXT ファイルを参照して 新の情報を確認し
てください。
■nv シリーズの I/O ノード
PU811、PU866
名称 説明
SA911 TC-net I/O インタフェース(電気)
SA912 TC-net I/O インタフェース(光)
PA912 PROFIBUS-DP マスタモジュール
SA911+IA931 TC-net I/O インタフェース(電気) + G3 I/O アダプタ
SA912+IA931 TC-net I/O インタフェース(光) + G3 I/O アダプタ
PU821、PU871
名称 説明 備考
SA911 TC-net I/O インタフェース(電気)
SA912 TC-net I/O インタフェース(光)
SA931 TC-net I/O インタフェース(LP900 シリーズ用)
SA941 TC-net I/O インタフェース(AI959B/AO969B 専用 電気)
SA942 TC-net I/O インタフェース(AI959B/AO969B 専用 光)
SA911+IA931 TC-net I/O インタフェース(電気) + G3 I/O アダプタ PU821 のみ使用可
SA912+IA931 TC-net I/O インタフェース(光) + G3 I/O アダプタ PU821 のみ使用可
■V シリーズのバス
[大型(モデル 3000)]
・パラレル I/O
IF721、IF728、IF741、IF748
R3PU45+IF721、S3PU45+IF721、S3PU45+IF741、S3PU55+IF721、
S3PU55+IF741
名称 説明
G3Bus G3 パラレルバス

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 30
・5800 I/O
R3PU45+IF71B
名称 説明
5800IOBus 5800 I/O バス
・MELPLAC I/O
R3PU45+IF72C
名称 説明
M_IOBus MELPLAC I/O バス
・シリアル I/O
IF735、L3PU11、 L3PU21
名称 説明
SerialBus シリアルバス
[小型(モデル 2000)]
・パラレル I/O
小型のパラレル I/O の場合、バスはメインモジュールではなく、専用の G2I/O
インタフェースモジュールに接続されます。ツール上は、左端コントローラに下記
のバスを接続します。
名称 説明
G2Bus_V G2 パラレルバス G2 I/O ユニット用
G2Bus_T G2 パラレルバス G2/T2 I/O ユニット用
G2Bus_EX G2 パラレルバス EX I/O ユニット用
・シリアル I/O
L2PU11(X)、L2PU12(X)、L2PU22(X)
名称 説明
SerialBus シリアルバス
[極小型(モデル 1000)]
・シリアル I/O
L1PU11、L1PU12
名称 説明
IOBus IO バス L1 用

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 31
1.2.2.4 I/O ユニット
メインユニットとは別に I/O モジュールを拡張する場合に使用するユニットです。
「拡張ユニット」と呼ぶことがあります。
nv シリーズの場合、TC-net I/O 用、パラレル I/O 用、シリアル I/O 用があり、
それぞれ、I/O ノードに接続されます。
V シリーズの場合、パラレル I/O 用、シリアル I/O 用、5800 I/O 用、MELPLAC
I/O 用があり、それぞれ、パラレルバス/シリアルバス/5800 I/O バス/MELPLAC
I/O バスに接続されます。
I/O ノードおよび、パラレルバス/シリアルバスに登録できる I/O ユニットは、下
記のとおりです。
■制約事項
・エンジニアリングツールがサポートする機器について、制約がある場合が有ります。
セットアップに添付されている ReadMe.TXT ファイルを参照して 新の情報を確認
してください。
■nv シリーズの I/O ユニット
・TC-net I/O
SA911、SA912
名称 説明
SIOUnit TC-net I/O ユニット 16 スロット
SA931
名称 説明
BU928F TC-net I/O ユニット(LP900 シリーズ用) 8 スロット
SA941、SA942
名称 説明
F-SIOUnit TC-net I/O ユニット(AI959B/AO969B 専用) 8 スロット
■V シリーズの I/O ユニット
[大型(モデル 3000)]
・パラレル I/O
G3Bus、SA911+IA931、SA921+IA931
名称 説明
BU356 G3 I/O ユニット(シングル) 6 スロット
BU35B G3 I/O ユニット(シングル) 11 スロット

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 32
・5800 I/O
5800IOBus
名称 説明
CHS-5839 5800 I/O ユニット(パワー I/O 専用) 9 スロット
CHS-5807 5800 I/O ユニット 17 スロット
・MELPLAC I/O
M_IOBus
名称 説明
BS4706-03 BS シリーズ用 I/O ユニット 1 スロット
E7CPU E シリーズ用 I/O ユニット 11 スロット
U1CPU E シリーズ用 I/O ユニット 5 スロット
DSU F シリーズ用 I/O ユニット 3 スロット
F1IOU F シリーズ用 I/O ユニット 10 スロット
EIOU K シリーズ用 I/O ユニット 8 スロット
E1IOU K シリーズ用 I/O ユニット 8 スロット
E3IOU K シリーズ用 I/O ユニット 8 スロット
E4IOU-F K シリーズ用 I/O ユニット 8 スロット
E4IOU-B K シリーズ用 I/O ユニット 8 スロット
IOU K シリーズ用 I/O ユニット 8 スロット
DCPU P シリーズ用 I/O ユニット 1 スロット
MDWU P シリーズ用 I/O ユニット 1 スロット
・シリアル I/O
SerialBus
名称 説明
SBIF1 シリアル I/O ユニット(シングル) 14 スロット
SBIF1Double シリアル I/O ユニット(2 重化) 14 スロット
SBIF2 シリアル I/O ユニット(シングル) 14 スロット 高速型
SBIF2Double シリアル I/O ユニット(2 重化) 14 スロット 高速型
F-AI/AO F シリーズ I/O ユニット(AI/AO)
F-DI/DO F シリーズ I/O ユニット(DI/DO)
SSIF1Unit シリアル I/O ユニット SSIF1 用
[小型(モデル 2000)]
・パラレル I/O
G2Bus_V
名称 説明
BU664_E G2 I/O ユニット 4 スロット
BU666_E G2 I/O ユニット 6 スロット
BU668_E G2 I/O ユニット 8 スロット

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 33
G2Bus_T
名称 説明
BU266 T2 I/O ユニット 6 スロット
BU268 T2 I/O ユニット 8 スロット
BU664_E G2 I/O ユニット 4 スロット
BU666_E G2 I/O ユニット 6 スロット
BU668_E G2 I/O ユニット 8 スロット
G2Bus_EX
名称 説明
UBB1 EX I/O ユニット 5 スロット
UBB2 EX I/O ユニット 8 スロット
・シリアル I/O
SerialBus
名称 説明
SBIF1 シリアル I/O ユニット(シングル) 14 スロット
SBIF1Double シリアル I/O ユニット(2 重化) 14 スロット
SBIF2 シリアル I/O ユニット(シングル) 14 スロット 高速型
SBIF2Double シリアル I/O ユニット(2 重化) 14 スロット 高速型
F-AI/AO F シリーズ I/O ユニット(AI/AO)
F-DI/DO F シリーズ I/O ユニット(DI/DO)
SSIF1Unit シリアル I/O ユニット SSIF1 用
[極小型(モデル 1000)]
・シリアル I/O
IOBus
名称 説明
IOUnit シリアル I/O ユニット L1 用 16 スロット

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 34
1.2.2.5 I/O モジュール
I/O ユニットを構成する I/O モジュールを指します。
nv シリーズの場合、TC-net I/O 用、パラレル I/O 用、シリアル I/O 用があり、
各々の I/O ユニットに接続されます。
V シリーズの場合、パラレル I/O 用、シリアル I/O 用、5800 I/O 用、MELPLAC
I/O 用があり、各々の I/O ユニットに接続されます。
I/O ユニットに登録できる I/O モジュールは、下記の通りです。
■制約事項
エンジニアリングツールがサポートする機器について、制約がある場合が有ります。セ
ットアップに添付されている ReadMe.TXT ファイルを参照して 新の情報を確認し
てください。
■nv シリーズの I/O モジュール
・TC-net I/O
SIOUnit
名称 説明
DI934 DC24V 5.2mA デジタルフィルタ
DI934I DC24V 5.2mA デジタルフィルタ(計装用)
DI934T DC24V 8mA(温度ディレーティング条件あり) デジタルフィルタ
DI944 DC48V 2.6mA デジタルフィルタ
DI944T DC48V 5mA 入力
DI935 DC24V 4mA デジタルフィルタ
DI936 DC12/24V 10mA デジタルフィルタ 各点独立
IN954 AC100/120V 10mA 入力
IN956 AC/DC-100/110V 各点独立
IN966 AC200/240V 10mA 各点独立
DI937 DC24V 10mA 接点入力
DI934S DC24V 5.2mA ストローブ付
DO934 DC12/24V 100mA/点 1.6A/コモン 16 点/コモン シンク出力
DO935 DC24V 100mA シンク出力
DO934P DC24V 100mA(P-COM) 出力
DO936 DC24V 2.0A FET-CH 間絶縁出力(ヒューズ無し)
DO944 DC48V 100mA(N-COM) 出力
AC963 AC100/240V- 2A/点
RO966 AC240V/DC24V-2.0A
AI914 0~5V 14bit 1ms 周期対応
AI918 0~5V 14bit(16bit フォーマット) 10ms 周期以下
AI918F 0~5V 16bit(16bit フォーマット) 10ms 周期以下
AI919 0~5V 14bit(16bit フォーマット) 50ms 周期以下
AI929D 0~5V 14bit(16bit フォーマット) 50ms 周期以下 ディストリビュータ付
AI918D 0~5V 14bit(16bit フォーマット) 10ms 周期以下 ディストリビュータ付
AI938 +-10V 14bit(S+13bit フォーマット) 0.5ms 周期
AI928 0-20mA 14bit 0.5ms 周期
AI969 16 点 mV/V 入力

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 35
名称 説明
TC919 熱電対(B,R,S,J,K,T,E タイプ)
RT918C 測温抵抗体 Pt100,JPt100
RT918 測温抵抗体 Pt100,JPt100
AO928 0~20mA 14bit(16bit フォーマット) 1ms 以下応答
AO928F 0~20mA 16bit(16bit フォーマット) 1ms 以下応答
AO929 0~20mA 14bit(16bit フォーマット) 20ms 周期以下
AO938 -10V~10V 14bit(S+15bit フォーマット) 5ms/8ch 周期以下
AO934F -10V~10V 16bit(S+15bit フォーマット) 0.175ms 周期以下
AO954F -10mA~10mA 16bit(S+15bit フォーマット) 0.175ms 周期以下
PI918 高速 DC~50kHz,低速 0-50Hz
PI924 バイパルス入力 DC~50kHz
PI934 RS485 作動パルス入力
PI948 8 点 電圧計装パルス
PI964 12/24V バイパルス(16/32bit カウンタ)入力
FL911 FL-net モジュール
EN911 Ethernet モジュール
AB932J レゾルバ式一回転アブソリュートエンコーダ
AB933J レゾルバ式多回転アブソリュートエンコーダ
AB934J レゾルバ式リニアエンコーダ
AB934JA レゾルバ式リニアエンコーダ
AB935J レゾルバ式リニアエンコーダ(高分解能)
AB936J レゾルバ式リニアエンコーダ(中分解能)
AB932N レゾルバ式一回転アブソリュートエンコーダ
AB933N レゾルバ式多回転アブソリュートエンコーダ
AB934N レゾルバ式リニアエンコーダ
AB935N レゾルバ式リニアエンコーダ(高分解能)
TP912M リニアセンサ
BU928F
名称 説明
LP918B AI12,MV8(4-20mA出力),DI8,DO8(シングル)
LP918BDouble AI12,MV8(4-20mA出力),DI8,DO8(二重化)
LP928B AI12,MV8(パルス出力),DI8,DO8(シングル)
LP928BDouble AI12,MV8(パルス出力),DI8,DO8(二重化)
F-SIOUnit
名称 説明
AI959B シグナルコンディショナ入力 16bit(16bit フォーマット) 25ms 周期以下(シングル)
AO969B シグナルコンディショナ出力 12bit(16bit フォーマット) 25ms 周期以下(シングル)
AI959BDouble シグナルコンディショナ入力 16bit(16bit フォーマット) 25ms 周期以下(二重化)
AO969BDouble シグナルコンディショナ出力 12bit(16bit フォーマット) 25ms 周期以下(二重化)

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 36
■V シリーズの I/O モジュール
[大型(モデル 3000)]
・パラレル I/O
BU356、BU35B
名称 説明
AB32N G3 I/O アブソコーダ変換器モジュール 1 回転型
AB33N G3 I/O アブソコーダ変換器モジュール 多回転型
AB34N G3 I/O アブソコーダ変換器モジュール 直線型
AC354 G3 I/O トライアック出力 32 点 AC100V 0.5A/点
AC363 G3 I/O トライアック出力 16 点 AC100/200V 2.0A/点
AC364 G3 I/O トライアック出力 32 点 AC100/200V 0.5A/点
AD314S G3 I/O 高速アナログ入力 4 点 0-5V チャネル絶縁
AD318 G3 I/O 高速アナログ入力 8 点 0-5V チャネル絶縁
AD324S G3 I/O 高速アナログ入力 4 点 4-20mA チャネル絶縁
AD328 G3 I/O 高速アナログ入力 8 点 4-20mA チャネル絶縁
AD334S G3 I/O 高速アナログ入力 4 点 ±10V チャネル絶縁
AD338 G3 I/O 高速アナログ入力 8 点 ±10V チャネル絶縁
AD368 G3 I/O アナログ入力 8 点 ±10V,±5V,0-20mA,4-20mA,0-5V,1-5V
AS311 G3 I/O ASCII インタフェース
BS311 G3 I/O BSC 手順通信モジュール
CD332 G3 I/O 状態変化検知入力 8 点
CD333 G3 I/O 状態変化検知入力 16 点
CD333-1W G3 I/O 状態変化検知入力 8 点(CD332 互換モード)
DA314S G3 I/O 高速アナログ出力 4 点 0-5V チャネル絶縁 (出力保持機能付き)
DA324S G3 I/O 高速アナログ出力 4 点 0-20mA チャネル絶縁 (出力保持機能付き)
DA334S G3 I/O 高速アナログ出力 4 点 ±10V チャネル絶縁
DA364 G3 I/O アナログ出力 4 点 ±10V,±5V,0-10V,0-5V
DA364S G3 I/O 高速アナログ出力 4 点 出力モードユーザ設定 チャネル絶縁 (出力保持機能付き)
DA374 G3 I/O アナログ出力 4 点 0-20mA,4-20mA
DA374S G3 I/O 高速アナログ出力 4 点 出力モードユーザ設定 チャネル絶縁 (出力保持機能付き)
DA384S G3 I/O 高速アナログ出力 4 点 ±10mA チャネル絶縁
DI324S G3 I/O ストローブ付き 32 点入力 DC12/15V ストローブ:2 点
DI333D G3 I/O DC12/24V 入力 16 点
DI334 G3 I/O DC24V 入力 DC12/24V 32 点
DI334H G3 I/O DC24V 入力 DC12/24V 32 点 高速
DI334S G3 I/O DC24V 入力 32 点 ストローブ 2 点
DI335 G3 I/O DC24V 入力 64 点
DI335H G3 I/O DC24V 入力 64 点 高速
DI344 G3 I/O DC48V 入力 32 点
DI353D G3 I/O DC110/AC100V 入力 16 点
DL311 G3 I/O TMX1000 手順通信モジュール
DN311A G3 I/O DeviceNet マスタモジュール(コントローラサポート無し)
DN311A-AS G3 I/O DeviceNet マスタモジュール(コントローラサポート有り)
DO333 G3 I/O トランジスタ出力 16 点 DC24V 2.0A/点
DO334 G3 I/O トランジスタ出力 32 点 DC24V 0.5A/点
DO334P G3 I/O トランジスタ出力 32 点ソース出力 DC24V 0.5A/点
DO335 G3 I/O トランジスタ出力 64 点 DC24V 0.1A/点
DO344 G3 I/O トランジスタ出力 32 点 DC48V
EN311 G3 I/O イーサネットインタフェース T シリーズ
FL311 G3 I/O FL-net モジュール(Ver1.00)
FL312 G3 I/O FL-net モジュール(Ver2.00)

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 37
名称 説明
IN354 G3 I/O AC100V 入力 32 点
IN364 G3 I/O AC200V 入力 32 点
M3ANY-iX+Y16W G3 I/O 8W 入力 8W 出力 割込付き
M3ANY-iX+Y2W G3 I/O 1W 入力 1W 出力 割込付き
M3ANY-iX+Y32W G3 I/O 16W 入力 16W 出力 割込付き
M3ANY-iX+Y4W G3 I/O 2W 入力 2W 出力 割込付き
M3ANY-iX+Y8W G3 I/O 4W 入力 4W 出力 割込付き
M3ANY-iX16W G3 I/O 16W 入力 割込付き
M3ANY-iX1W G3 I/O 1W 入力 割込付き
M3ANY-iX2W G3 I/O 2W 入力 割込付き
M3ANY-iX32W G3 I/O 32W 入力 割込付き
M3ANY-iX4W G3 I/O 4W 入力 割込付き
M3ANY-iX8W G3 I/O 8W 入力 割込付き
M3ANY-OPT G3 I/O メモリタイプモジュール
M3ANY-X+Y16W G3 I/O 8W 入力 8W 出力
M3ANY-X+Y2W G3 I/O 1W 入力 1W 出力
M3ANY-X+Y32W G3 I/O 16W 入力 16W 出力
M3ANY-X+Y4W G3 I/O 2W 入力 2W 出力
M3ANY-X+Y8W G3 I/O 4W 入力 4W 出力
M3ANY-X16W G3 I/O 16W 入力
M3ANY-X1W G3 I/O 1W 入力
M3ANY-X2W G3 I/O 2W 入力
M3ANY-X32W G3 I/O 32W 入力
M3ANY-X4W G3 I/O 4W 入力
M3ANY-X8W G3 I/O 8W 入力
M3ANY-Y16W G3 I/O 16W 出力
M3ANY-Y1W G3 I/O 1W 出力
M3ANY-Y2W G3 I/O 2W 出力
M3ANY-Y32W G3 I/O 32W 出力
M3ANY-Y4W G3 I/O 4W 出力
M3ANY-Y8W G3 I/O 8W 出力
MC352 G3 I/O 2 軸位置決め
MC392 G3 I/O OLB 用 2 軸位置決めモジュール
ML311 G3 I/O MODBUS 通信モジュール
MS311 G3 I/O TL-F10 マスタモジュール
MS321-128 G3 I/O TL-F10M マスタモジュール 128 ワード型
MS321-256 G3 I/O TL-F10M マスタモジュール 256 ワード型
MS321-32 G3 I/O TL-F10M マスタモジュール 32 ワード型
MS321-64 G3 I/O TL-F10M マスタモジュール 64 ワード型
MS331 G3 I/O TL-F10L マスタモジュール
PF311 G3 I/O PROFIBUS-DP マスタモジュール
PF312 G3 I/O PROFIBUS-DP スレーブモジュール
PI312 G3 I/O パルス入力 2 点 50kpps DC5/12V
PI312-20 G3 I/O パルス入力 2 点 50kpps DC5/12V
PI314 G3 I/O パルス入力 4 点 50kpps DC12/24V
PI314-32 G3 I/O パルス入力 4 点 50kpps DC12/24V
PI314-32R G3 I/O パルス入力 4 点 50kpps DC12/24V
PI318 G3 I/O パルス入力 8 点 50kpps DC12/24V
PI318-32 G3 I/O パルス入力 8 点 50kpps DC12/24V
PI318-32R G3 I/O パルス入力 8 点 50kpps DC12/24V
PI324 G3 I/O パルス入力 4 点 2.6Mpps/650Kpps RS485 差動入力 チャネル絶縁
PI324-16 G3 I/O パルス入力 4 点 2.6Mpps/650Kpps RS485 差動入力 チャネル絶縁
PI324-16R G3 I/O パルス入力 4 点 2.6Mpps/650Kpps RS485 差動入力 チャネル絶縁

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 38
名称 説明
RD32T G3 I/O アブソリュ-ト位置検出モジュール
RO363S G3 I/O 接点出力 16 点 AC250/DC30V 2.0A/点 独立コモン
RO364 G3 I/O 接点出力 32 点 AC250/DC30V 2.0A/点
RS311 G3 I/O TL-F10 スレーブモジュール
RT318 G3 I/O 測温抵抗体入力 8 点 Pt100
SN321 G3 I/O TL-S20 モジュール 同軸方式
SN322A G3 I/O TL-S20 モジュール 光方式
SN323 G3 I/O TL-S20 モジュール 同軸/光方式
SN324 G3 I/O TL-S20 モジュール 光方式(長距離)
SN325 G3 I/O TL-S20LP モジュール 光ループ方式
SV31N G3 I/O サーボ通信インタフェースモジュール
TM311 G3 I/O テレメータ通信モジュール
TP312 G3 I/O テンポソニックセンサ I/F モジュール
UW311-X+Y2W G3 I/O ユニワイヤモジュール
UW311-X+Y4W G3 I/O ユニワイヤモジュール 32 点入力 32 点出力
UW311-X+Y8W G3 I/O ユニワイヤモジュール 64 点入力 64 点出力
UW311-X4W G3 I/O ユニワイヤモジュール 64 点入力
UW311-X8W G3 I/O ユニワイヤモジュール 128 点入力
UW311-Y4W G3 I/O ユニワイヤモジュール 64 点出力
UW311-Y8W G3 I/O ユニワイヤモジュール 128 点出力
CD332-1N G3 I/O 状態変化検知入力 8 点 (nv 専用)
CD333-1N G3 I/O 状態変化検知入力 16 点 (nv 専用)
PI312-30N G3 I/O パルス入力 2ch 50kpps DC5/12V (nv 専用)
AS311-4N G3 I/O ASCII インタフェース (nv 専用)
BS311-4N G3 I/O BSC 手順通信モジュール (nv 専用)
・5800I/O
CHS-5807、CHS-5839
名称 説明
SF-5847 5800 I/O スレーブインタフェース
BF-5837 5800 I/O バッファインタフェース
PBF-5838 5800 I/O パワー I/O バッファ
HDO-5856 5800 I/O 32 点ハンドシェークトランジスタ出力(割込み不可)
DI-5857 5800 I/O 32 点 DC 入力(DC15-48V-4mA)
DO-5852 5800 I/O 32 点トランジスタ出力(DC15-48V)
RO-5853 5800 I/O 16 点リレー出力(8 点/コモン)
AO-5860 5800 I/O 4ch アナログ出力
REO-5864 5800 I/O 抵抗出力
RO-5854 5800 I/O 16 点リレー出力(独立コモン)
HDI-5855 5800 I/O 32 点ハンドシェーク DC 入力(割込み不可)
CDDI-5851 5800 I/O 状態変化検出ディジタル入力(割込み不可)
AI-5861 5800 I/O 8ch アナログ入力
RTD-5863 5800 I/O 抵抗温度入力
AIEX-5862 5800 I/O 拡張アナログ入力
PI-5870 5800 I/O 8 点パルス入力(割込み不可)
PIB-5871 5800 I/O 4 点バイパルス入力(割込み不可)
ACO-5881 5800 I/O 16 点 AC 出力
INP-5880 5800 I/O 16 点 AC 入力
DCO-5882 5800 I/O 16 点パワー出力
DI-5886 5800 I/O 128 点独立型パワー I/O 用 DI
DO-5887 5800 I/O 128 点独立型パワー I/O 用 DO
MC1-5631 5800 I/O 16-128W TOSLINE-100 ステーション

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 39
名称 説明
MC2-5632 5800 I/O 64-1024W TOSLINE-1000 ステーション
MSP-5627 5800 I/O 8-64W TOSLINE-30 ステーション
SN1-7885 5800 I/O 8-1024W TOSLINE-S20 ステーション
SN2-7886 5800 I/O 8-1024W TOSLINE-S20 ステーション
・MELPLAC I/O
BS4706-03、E7CPU、U1CPU、DSU、F1IOU、EIOU、E1IOU、E3IOU、E4IOU-F、
E4IOU-B、IOU
DCPU、MDWU
名称 説明
BS4118-01 油圧圧下 I/F JP-EI2000L 用 IOB
E3CF MDWS-700S1 I/F カード
E4XF NET Ⅱ I/F カード
E5VF RIO メインカード
E5XF NET-10 IF カード
FF2F 油圧圧下コントローラ用バスチェンジャ
FI2F デジタル入力 DC48V 高速 32 点 内 16 点割り込み可
FI3F デジタル入力 DC48V 高速 インヒビット付(32 点+インヒビット 2 点)
FI4F デジタル入力 DC48V 高速 32 点
FI5F インヒビット付き DC24V 入力 32 点+インヒビット 2 点
FO2F オープンコレクタ出力 インヒビット付(32 点+インヒビット 2 点)
FO3F オープンコレクタ出力 32 点
FQ2F アナログ入力 8 点
FQ3F アナログ入力 8 点 高速版(同期式は削除)
FR2F アナログ出力 8 点
FR3F アナログ出力 4 点 +-10V 50mA
FT2F MDWS-600S2 I/F カード
FTDF MDWS-600S1 I/F カード
FU2F-R RIO メイン 遠方 PY ステーション(リモート I/O)
FU2F-C RIO メイン 遠方 PY ステーション(CPU 間通信)
FU3F-R RIO メイン 遠方 PY ステーション(リモート I/O)
FU3F-C RIO メイン 遠方 PY ステーション(CPU 間通信)
FU6F-R RIO システム(リモート I/O)
FU6F-C RIO システム(CPU 間通信)
FU2F-R2 RIO メイン 遠方 PY ステーション(リモート I/O)-2
FU2F-C2 RIO メイン 遠方 PY ステーション(CPU 間通信)-2
FU3F-R2 RIO メイン 遠方 PY ステーション(リモート I/O)-2
FU3F-C2 RIO メイン 遠方 PY ステーション(CPU 間通信)-2
FU6F-R2 RIO システム(リモート I/O)-2
FU6F-C2 RIO システム(CPU 間通信)-2
FV2F DIG-THY I/F カード(同軸)
FV4F DIG-THY I/F カード(同軸)
K5AF RIO MELPLEX-メイン
K5GF THY-I/F(光)
K5LF A-NETⅡ-I/F
K6GF THY-I/F(光)
KC1A カウンタ
KC3A カウンタ
KI3A デジタル入力 AC100V 16 点
KI5A デジタル入力 DC48V 32 点
KI5B デジタル入力 DC24V 32 点
KI5C デジタル入力 DC48V 64 点

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 40
名称 説明
KI5D デジタル入力 DC5V 32 点
KI5E デジタル入力 DC24V 64 点(CYCLIC)
KI5F デジタル入力 DC24V 64 点
KI5G デジタル入力 DC48V 32 点(インヒビット付)
KI5H デジタル入力 DC24V 32 点(インヒビット付)
KI5Y デジタル入力 DC48V 32 点
KI6C デジタル入力 DC48V 16 点(内割り込み 8 点)P750 対応
KI6D デジタル入力 DC24V 16 点(内割り込み 8 点)
KI7B シャフトエンコーダ入力 DC24V 32 点
KI7C 位置検出カード
KO3A 接点出力(片側コモン) 32 点
KO3B 接点出力(独立コモン) 32 点
KO4A オープンコレクタ出力 DC12-48V 32 点
KO4C オープンコレクタ出力 64 点
KO5A トライアック出力 16 点 AC 電磁弁(ヒューズ付)
KO5B トライアック出力 16 点 AC 電磁弁(ヒューズ・アラーム付)
KO5C トライアック出力 16 点 AC 電磁弁(ヒューズ無)
KO6A FET 出力 DC 電磁弁 24-100V 16 点
KO6B オープンコレクタ出力 DC 電磁弁 12-24V 16 点
KO6C FET 出力 DC 電磁弁 100V(ヒューズ無)
KO6D オープンコレクタ出力 DC 電磁弁 24V(ヒューズ無)
KO7A LED 表示(8 桁)
KQ2A +-10V アナログ入力 8 点
KQ2B 0-10V アナログ入力 8 点
KQ2C 0-10V アナログ入力 16 点
KQ2D 0-10V アナログ入力 16 点(S/W フィルタ付)
KQ2E +-10V アナログ入力 8 点
KQ3A アナログ入力 8 点・出力 8 点 電流出力
KQ3B アナログ入力 8 点・出力 8 点(2 重化対応) 電流出力
KQ3C アナログ入力 8 点・出力 8 点(2 重化対応) 電流出力
KQ5A アナログ出力 +-10V 4 点
KQ5C アナログ出力 0-20mA 8 点
KQ5D アナログ出力 8 点
KQ5E アナログ出力 8 点
P7GF-P MDWS-515P/506E 用 IOB(PLC STN)
P7GF-D MDWS-515P/506E 用 IOB(DRIO STN)

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 41
・シリアル I/O
SBIF1、SBIF1Double
名称 説明
SAI01 シリアル I/O AI 8 点 mV,V
SAI02 シリアル I/O AI 4 点 DC1-5V
SAI03 シリアル I/O AI 4 点 DC1-5V デイストリビュータ付き
SAO01 シリアル I/O AO 8 点 DC4-20mA
SAO02 シリアル I/O AO 4 点 DC4-20mA
SDI01 シリアル I/O DI 32 点 DC24V
SDI01A シリアル I/O DI 32 点 DC24V 同期入力付き
SDO01 シリアル I/O DO 32 点 DC24V
SPI01 シリアル I/O PI 4 点
SPO01 シリアル I/O PO 4 点
SRT01 シリアル I/O RTD 4 点
STC01 シリアル I/O TC 8 点
SBIF2、SBIF2Double
名称 説明
SAI06 シリアル I/O AI 8 点 mV,V (シングル)
SAI06Double シリアル I/O AI 8 点 mV,V (2 重化)
SAO06 シリアル I/O AO 8 点 (シングル)
SAO06Double シリアル I/O AO 8 点 (2 重化)
SPI06 シリアル I/O PI 4 点 (シングル)
SPI06Double シリアル I/O PI 4 点 (2 重化)
F-AI/AO、 F-DI/DO
名称 説明
SAIF1 F シリーズ I/O AI 16 点 (シングル)
SAIF1Double F シリーズ I/O AI 16 点 (2 重化)
SAOF1 F シリーズ I/O AO 16 点 (シングル)
SAOF1Double F シリーズ I/O AO 16 点 (2 重化)
SDIF1 F シリーズ I/O DI 32 点
SDOF1 F シリーズ I/O DO 32 点
SSIF1Unit
名称 説明
SSIF1 汎用 PLC インタフェース

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 42
[小型(モデル 2000)]
・パラレル I/O
BU664_E、BU666_E、BU668_E
名称 説明
AC663 G2 I/O トライアック出力 12 点 AC100-240V 0.5A/点
AD624 G2 I/O アナログ入力 4ch 4-20mA/1-5V 12bits
AD624L G2 I/O アナログ入力 4ch 4-20mA/1-5V 8bits
AD628S G2 I/O アナログ入力 8ch 0-5V/0-20mA 12bits 各点絶縁
AD634L G2 I/O アナログ入力 4ch 0-10V 8bits
AD638S G2 I/O アナログ入力 8ch -10-+10V 12bits 各点絶縁
AD674 G2 I/O アナログ入力 4ch -10-+10V 12bits
CD633 G2 I/O 状態変化検知モジュール 16 点
CF611 G2 I/O 汎用通信インタフェース RS232C 1ch 160 ワード*2
DA614S G2 I/O アナログ出力 4ch 0-5V 16bits 各点絶縁
DA622 G2 I/O アナログ出力 2ch 4-20mA/1-5V 12bits
DA622L G2 I/O アナログ出力 2ch 4-20mA/1-5V 8bits
DA624S G2 I/O アナログ出力 4ch 0-20mA 16bits 各点絶縁
DA672 G2 I/O アナログ出力 2ch -10-+10V 12bits
DI633 G2 I/O DC/AC 入力 16 点 DC/AC12-24V
DI634 G2 I/O DC 入力 32 点 DC24V
DI635 G2 I/O DC 入力 64 点 DC24V
DI635H G2 I/O 高速 DC 入力 64 点 DC24V
DI643 G2 I/O DC 入力 16 点 DC48V
DI653 G2 I/O DC 入力モジュール 16 点 DC110V
DN611A G2 I/O DeviceNet マスタモジュール(コントローラサポート無し)
DN611A-AS G2 I/O DeviceNet マスタモジュール(コントローラサポート有り)
DO633 G2 I/O トランジスタ出力 16 点 DC5-24V 1A/点
DO633P G2 I/O トランジスタ出力 16 点 DC12-24V 1A/点(ソース出力)
DO634 G2 I/O トランジスタ出力 32 点 DC5-24V 100mA/点
DO635 G2 I/O トランジスタ出力 64 点 DC5-24V 100mA/点
FL611 G2 I/O FL-net モジュール(Ver1.00)
FL612 G2 I/O FL-net モジュール(Ver2.00)
IN653 G2 I/O AC 入力 16 点 AC100-120V
IN663 G2 I/O AC 入力 16 点 AC200-240V
LK611 G2 I/O TOSLINE-30 ツイストペアケーブル方式
LK612 G2 I/O TOSLINE-30 光伝送方式
M2ANY-iX+Y2W G2 I/O 1W 入力 1W 出力 割込付き
M2ANY-iX+Y4W G2 I/O 2W 入力 2W 出力 割込付き
M2ANY-iX+Y8W G2 I/O 4W 入力 4W 出力 割込付き
M2ANY-iX1W G2 I/O 1W 入力 割込付き
M2ANY-iX2W G2 I/O 2W 入力 割込付き
M2ANY-iX4W G2 I/O 4W 入力 割込付き
M2ANY-iX8W G2 I/O 8W 入力 割込付き
M2ANY-X+Y2W G2 I/O 1W 入力 1W 出力
M2ANY-X+Y4W G2 I/O 2W 入力 2W 出力
M2ANY-X+Y8W G2 I/O 4W 入力 4W 出力
M2ANY-X1W G2 I/O 1W 入力
M2ANY-X2W G2 I/O 2W 入力
M2ANY-X4W G2 I/O 4W 入力
M2ANY-X8W G2 I/O 8W 入力
M2ANY-Y1W G2 I/O 1W 出力
M2ANY-Y2W G2 I/O 2W 出力

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 43
名称 説明
M2ANY-Y4W G2 I/O 4W 出力
M2ANY-Y8W G2 I/O 8W 出力
MC612 G2 I/O 2 位置決めモジュール
MC614 G2 I/O 4 軸位置決めモジュール
PF611 G2 I/O PROFIBUS-DP マスタモジュール
PF612 G2 I/O PROFIBUS-DP スレーブモジュール
PI631 G2 I/O パルス入力 1ch DC5/12V 100kppsMax
PI632 G2 I/O パルス入力 2ch DC5/12V/24V 100kppsMax
PI672 G2 I/O パルス入力 2ch RS422 100kppsMax
RO662S G2 I/O 接点出力 8 点 AC240/DC24V 2A/点 各点絶縁
RO663 G2 I/O 接点出力 16 点 AC240/DC24V 2A/点
SN621 G2 I/O TL-S20 モジュール 同軸方式
SN622 G2 I/O TL-S20 モジュール 光伝送方式
TC618 G2 I/O 熱電対入力モジュール 8ch
UN611 G2 I/O TL-F10 マスタモジュール
UN612 G2 I/O TL-F10 スレーブモジュール
BU266、BU268、UBB1、UBB2
名称 説明
AC61 G2 I/O トライアック出力 12 点 AC100-240V 0.5A/点
AD814 G2 I/O アナログ入力 4ch 0-20mA/0-5V 12bits
AI21 G2 I/O アナログ入力 4ch 4-20m/1-5V 8bits
AI22 G2 I/O アナログ入力 4ch 4-20m/1-5V 12bits
AI31 G2 I/O アナログ入力 4ch 0-10V 8bits
AI32 G2 I/O アナログ入力 4ch -10-+10V 12bits
AO22 G2 I/O アナログ出力 2ch 4-20mA/1-5V 12bits
AO31 G2 I/O アナログ出力 2ch 4-20mA/1-5V 8bits
AO32 G2 I/O アナログ出力 2ch -10-+10V 12bits
AS11 G2 I/O ASCII/BASIC モジュール
CF211 G2 I/O 汎用通信インタフェース RS232C 1ch 160 ワード*2
DA822 G2 I/O アナログ出力 2ch 0-20mA 12bits
DA832 G2 I/O アナログ出力 2ch 0-10V 12bits
DI234 G2 I/O DC 入力 32 点 DC24V
DI235 G2 I/O DC 入力 64 点 DC24V
DI235H G2 I/O 高速 DC 入力 64 点 DC24V
DI31 G2 I/O DC/AC 入力 16 点 DC/AC12-24V
DI32 G2 I/O DC 入力 32 点 DC24V
DI33 G2 I/O DC 入力 8 点 DC24V
DI41 G2 I/O DC 入力 16 点 DC48V
DI832 G2 I/O 無電圧接点入力 8 点
DN211A G2 I/O DeviceNet マスタモジュール(コントローラサポート無し)
DN211A-AS G2 I/O DeviceNet マスタモジュール(コントローラサポート有り)
DO233P G2 I/O トランジスタ出力 16 点 DC12-24V 1A/点(ソース出力)
DO234 G2 I/O トランジスタ出力 32 点 DC5-24V 100mA/点
DO235 G2 I/O トランジスタ出力 64 点 DC5-24V 100mA/点
DO31 G2 I/O トランジスタ出力 16 点 DC5-24V 1A/点
DO32 G2 I/O トランジスタ出力 32 点 DC5-24V 100mA/点
FL211 G2 I/O FL-net モジュール(Ver1.00)
FL212 G2 I/O FL-net モジュール(Ver2.00)
IN51 G2 I/O AC 入力 16 点 AC100-120V
IN52 G2 I/O AC 入力 16 点 AC100-120V
IN61 G2 I/O AC 入力 16 点 AC200-240V
IN62 G2 I/O AC 入力 16 点 AC200-240V

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 44
名称 説明
LK11 G2 I/O TOSLINE-30 ツイストペアケーブル方式
LK12 G2 I/O TOSLINE-30 光伝送方式
M2EANY-iX+Y2W G2 I/O 1W 入力 1W 出力 割込付き
M2EANY-iX+Y4W G2 I/O 2W 入力 2W 出力 割込付き
M2EANY-iX+Y8W G2 I/O 4W 入力 4W 出力 割込付き
M2EANY-iX1W G2 I/O 1W 入力 割込付き
M2EANY-iX2W G2 I/O 2W 入力 割込付き
M2EANY-iX4W G2 I/O 4W 入力 割込付き
M2EANY-iX8W G2 I/O 8W 入力 割込付き
M2EANY-X+Y2W G2 I/O 1W 入力 1W 出力
M2EANY-X+Y4W G2 I/O 2W 入力 2W 出力
M2EANY-X+Y8W G2 I/O 4W 入力 4W 出力
M2EANY-X1W G2 I/O 1W 入力
M2EANY-X2W G2 I/O 2W 入力
M2EANY-X4W G2 I/O 4W 入力
M2EANY-X8W G2 I/O 8W 入力
M2EANY-Y1W G2 I/O 1W 出力
M2EANY-Y2W G2 I/O 2W 出力
M2EANY-Y4W G2 I/O 4W 出力
M2EANY-Y8W G2 I/O 8W 出力
MC11 G2 I/O 1 軸位置決めモジュール
MC212 G2 I/O 2 軸位置決めモジュール
MS211 G2 I/O TL-F10 マスタモジュール
PI21 G2 I/O パルス入力 1ch DC5/12V 100kppsMax
PI232 G2 I/O パルス入力 2ch DC5/12V/24V 100kppsMax
PI272 G2 I/O パルス入力 2ch RS422 100kppsMax
RC831A G2 I/O リモコンリレーモジュール AC24V
RO263 G2 I/O 接点出力 16 点 AC240/DC24V 2A/点
RO61 G2 I/O 接点出力 12 点 AC240/DC24V 2A/点
RO62 G2 I/O 接点出力 8 点 AC240/DC24V 2A/点(各点絶縁)
RO832 G2 I/O 接点出力 8 点 AC240-DC24V 2A/点
RS211 G2 I/O TL-F10 スレーブモジュール
RT814 G2 I/O 測温抵抗体入力 Pt100 4 点
SN221 G2 I/O TL-S20 同軸方式
SN222A G2 I/O TL-S20 光伝送方式
TC218 G2 I/O 熱電対入力モジュール 8ch
・シリアル I/O
SBIF1、SBIF1Double
名称 説明
SAI01 シリアル I/O AI 8 点 mV,V
SAI02 シリアル I/O AI 4 点 DC1-5V
SAI03 シリアル I/O AI 4 点 DC1-5V デイストリビュータ付き
SAO01 シリアル I/O AO 8 点 DC4-20mA
SAO02 シリアル I/O AO 4 点 DC4-20mA
SDI01 シリアル I/O DI 32 点 DC24V
SDI01A シリアル I/O DI 32 点 DC24V 同期入力付き
SDO01 シリアル I/O DO 32 点 DC24V
SPI01 シリアル I/O PI 4 点
SPO01 シリアル I/O PO 4 点
SRT01 シリアル I/O RTD 4 点
STC01 シリアル I/O TC 8 点

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 45
SBIF2、SBIF2Double
名称 説明
SAI06 シリアル I/O AI 8点 mV,V (シングル)
SAI06Double シリアル I/O AI 8点 mV,V (2重化)
SAO06 シリアル I/O AO 8点 (シングル)
SAO06Double シリアル I/O AO 8点 (2重化)
SPI06 シリアル I/O PI 4点 (シングル)
SPI06Double シリアル I/O PI 4点 (2重化)
F-AI/AO、F-DI/DO
名称 説明
SAIF1 F シリーズ I/O AI 16 点 (シングル)
SAIF1Double F シリーズ I/O AI 16 点 (2 重化)
SAOF1 F シリーズ I/O AO 16 点 (シングル)
SAOF1Double F シリーズ I/O AO 16 点 (2 重化)
SDIF1 F シリーズ I/O DI 32 点
SDOF1 F シリーズ I/O DO 32 点
SSIF1Unit
名称 説明
SSIF1 汎用 PLC インタフェース
[極小型(モデル 1000)]
・シリアル I/O
IOUnit
名称 説明
SAI01 シリアル I/O AI 8 点 mV,V
SAI02 シリアル I/O AI 4 点 DC1-5V
SAI03 シリアル I/O AI 4 点 DC1-5V デイストリビュータ付き
SAO01 シリアル I/O AO 8 点 DC4-20mA
SAO02 シリアル I/O AO 4 点 DC4-20mA
SDI01 シリアル I/O DI 32 点 DC24V
SDI01A シリアル I/O DI 32 点 DC24V 同期入力付き
SDO01 シリアル I/O DO 32 点 DC24V
SPI01 シリアル I/O PI 4 点
SPO01 シリアル I/O PO 4 点
SRT01 シリアル I/O RTD 4 点
STC01 シリアル I/O TC 8 点
SAI06 シリアル I/O AI 8 点 mV,V (シングル)
SAO06 シリアル I/O AO 8 点 (シングル)
SLP01 シリアル I/O AI4,MV(4-20mA 出力),AO2,DI3,DO4
SLP02 シリアル I/O AI4,MV(パルス幅出力),AO2,DI3,DO4
SLP03 シリアル I/O AI4,MV(4-20mA 出力),AO2,DI3,DO4
SLP04 シリアル I/O AI4,MV(パルス幅出力),AO2,DI3,DO4
SPI06 シリアル I/O PI 4 点 (シングル)

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 46
1.2.2.6 ハードアドレス
nv シリーズの場合、メインモジュール、I/O ノード、I/O ユニット、I/O モジュー
ル、I/O ポイントのハード的な位置を表します。
それぞれは下記のようなアドレス表現をします。
名称 アドレス表現 説明
メインモジュール メインスロット No. メインユニット内のスロット番号
I/O ノード ノード No. インタフェース毎の一意な I/O ノードの番号
I/O ユニット ユニット No. 1 つの I/O ノード配下の一意な I/O ユニットの番号
I/O モジュール スロット No. I/O ユニット内のスロット番号
I/O ポイント ポイント No. I/O ポイントの番号
V シリーズの場合、メインモジュール、バス、I/O ユニット、I/O モジュール、I/O
ポイントのハード的な位置を表します。
それぞれは下記のようなアドレス表現をします。
名称 アドレス表現 説明
メインモジュール メインスロット No. メインユニット内のスロット番号
バス バス No. インタフェース毎の一意なバスの番号
I/O ユニット ユニット No. 1 つのバス内の一意な I/O ユニットの番号
I/O モジュール スロット No. I/O ユニット内のスロット番号
I/O ポイント ポイント No. I/O ポイントの番号
■nv シリーズのアドレス表現の範囲
nv シリーズのアドレス表現の範囲は、下記の通りです。
有効範囲 アドレス表現
共通 TC-net I/O パラレル I/O シリアル I/O
メインスロット No. 0-Max - - -
ノード No. 3-Max - - -
ユニット No. - 1 1-Max 1-Max
スロット No. - 0-15 0-Max 1-Max
ポイント No. - 0-Max 0-Max 1-Max
■V シリーズのアドレス表現の範囲
各ステーションモデル毎のアドレス表現の範囲は、下記の通りです。
[大型(モデル 3000)]
有効範囲 アドレス表現
共通 パラレル I/O 5800 I/O シリアル I/O
メインスロット No. 0-Max - - -
バス No. - 0-Max 0-Max 1-Max
ユニット No. - 1-Max 1-Max 1-Max
スロット No. - 0-Max 0-Max 1-Max
ポイント No. - 0-Max 0-Max 1-Max

1.2 nv シリーズ/V シリーズのハードウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 47
[小型(モデル 2000)]
有効範囲 アドレス表現
共通 パラレル I/O シリアル I/O
メインスロット No. 0-Max - -
バス No. Z- 0-Max 1-Max
ユニット No. - 1-Max 1-Max
スロット No. - 0-Max 1-Max
ポイント No. - 0-Max 1-Max
[極小型(モデル 1000)]
有効範囲 アドレス表現
共通 シリアル I/O
メインスロット No. 0-Max -
バス No. - 1
ユニット No. - 1
スロット No. - 0-15
ポイント No. - 1-Max
■ハードアドレスの表記
ツール上では、メインモジュール、バス(nv シリーズの場合、I/O ノード)、I/O ユ
ニット、I/O モジュールの位置を特定するのに、ハードアドレスの組み合わせで下記の
ように表します。
{ MM-BB-UU-SS }
MM:メインスロット No.
BB:バス No. (nv シリーズの場合、ノード No.)
UU:ユニット No.
SS:スロット No.
上記の内、該当しない箇所は、”**”の表示となります。
下記に V シリーズのハードアドレスの表記例を示します。
・メインスロット No.=3 のメインモジュールの場合
{03-**-**-**}
・メインスロット No.=1、バス No.=0 のバスの場合
{01-00-**-**}
・メインスロット No.=1、バス No.=2、ユニット No.=5 の I/O ユニットの場合
{01-02-05-**}
・メインスロット No.=1、バス No.=1、ユニット No.=3、スロット No.=8 の I/O
モジュールの場合
{01-01-03-08}

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 48
1.3 nv シリーズ/V シリーズのソフトウェアモデル
■ソフトウェア構成図
ステーション
ステーション変数
メインモジュール
伝送モジュール
I/O 変数
I/O モジュール
PI/O S20
タスク
メインモジュ-ル
タスク
ネットワーク変数
ネットワーク変数
ステーション
ステーション変数
I/O 変数
I/O モジュール
PI/O S20
タスクタスク
ネットワーク (S20)
ネットワーク (Tc-net)
コントローラ変数コントローラ変数 コントローラ変数 コントローラ変数
システム
メインモジュ-ル メインモジュール
伝送モジュール
コンフィグレーション コンフィグレーション コンフィグレーションコンフィグレーション
メインモジュ-ル メインモジュ-ル
■ソフトウェア要素の意味
タスク 制御プログラムの実行スケジュール単位。
コントローラ変数 コントローラ内の各種レジスタ、パラメータ、データ。
I/O 変数 プロセス I/O 信号や S20、F10 などの I/O データ。
ステーション変数 コントローラ間のデータ授受に使用するデータ。
ネットワーク変数 スキャン伝送方式の LAN 上のスキャンデータ。
コンフィグレーション メインユニットや I/O などのハードウェア構成情報。
これらは、ハードウェアの種類によっても、その用途や容量が異なります。こ
れを次ページより説明します。

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 49
1.3.1 タスク
「タスク」とは、コントローラ上の制御プログラムの実行スケジュール単位
で、数種用意されています。また、タスクはエントリポイントを複数持ち、ユ
ーザのプログラムはこのエントリポイントに登録して実行されます。このエン
トリポイントのことを「タスクエントリ」と呼びます。このタスクエントリ単
位で、プログラムを作成、保存、コンパイル、ダウンロード、モニタすること
ができます。
スケジューラ EV タスク
SS タスク
IP タスク
HS タスク
MS タスク
BG タスク
EV0
EV7
HS0
HS31
コントローラタスクエントリタスク
MyProgram
XPro_1
Tic_Fic
■タスクの種類 記号 名称 実行優先度 用途
EV イベントタスク 1 電源投入、I/O 縮退など内部的なイベント発生時、一度だけ実行する処理
SS 超高速タスク 2 スキャン実行型でもっとも優先の高い処理
IP 割り込みタスク 3 CCDI,PI 等 PI/O 割り込み発生時、一度だけ実行する処理
HS 高速スキャンタスク
4 スキャン実行型で2番目に優先の高い処理
MS メインスキャンタスク
5 スキャン実行型で3番目に優先の高い処理
BG バックグランドタスク
6 スキャン実行型で4番目に優先の高い処理

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 50
1.3.2 タスクエントリ
タスクエントリの数はコントローラ機種毎に固定で、次のとおりです。
■nv シリーズのタスクエントリ数
[type1]
コントローラ名 EV SS IP HS MS
PU811 8 1 16 128 256
[type2]
コントローラ名 EV IP HS MS
PU821 8 16 128 512
■V シリーズのタスクエントリ数
[S コントローラ]
コントローラ名 EV SS IP HS MS BG
S3PU65 8 1 8 128 256 4
S3PU55 8 1 8 128 256 4
S3PU45 8 1 8 32 256 4
S2PU21 8 1 8 32 256 4
S3ST45 - - - - 8 -
S2PU72 8 1 8 32 256 4
S2PU32 8 1 8 32 256 4
S2PU22 8 1 8 32 256 4
[L コントローラ]
コントローラ名 EV SS IP HS MS BG
L3PU11 8 1 8 32 256 4
L3PU21 16 - 32 128 256 4
L2PU11 8 1 8 8 64 1
L2PU12 8 1 8 8 64 1
L2PU22 16 - 32 128 256 4
L1PU11 - - - - 8 -
L1PU12 - - - - 8 -
LC511 - - - - 8 -
LC512 - - - - 8 -
○補足
・ V-Tool では、タスクエントリを、タスクの記号とエントリ No を使って、「EV7」、「MS0」
のように表現します。エントリ No は 0 から始まります。

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 51
1.3.3 プログラム
■プログラムの構成
引数
内部変数
データ部
コード部
Trigger XFlag MyStatus
MyStatusプログラムコード
VAR_INPUTTrigger :BOOL; (*トリガ信号 *)XFlag :BOOL;
END_VAR
VARMyStatus :BOOL;
END_VAR
「プログラム」は、まず「データ部」と「コード部」に分けられます。データ
部は、引数と内部変数からなります。引数とは、一般的な高級言語のサブルー
チン引数と同じように、プログラムを呼び出す前に、外部から与えられ、プロ
グラム実行中にその値(またはポインタ)を使って演算するために使います。
この意味で、引数は「外部に公開されたインタフェース」と呼ばれることがあ
ります。「内部変数」とは、文字どおり、プログラム内部だけで使用する変数で、
外部に公開されません。
■プログラム名
プログラム名は、プログラムを新規追加するとき、タスクエントリ毎にユーザ
が設定します。タスクエントリに登録されたプログラムはライブラリに自動登
録されます。既にライブラリに登録されているプログラムを選択し再利用をす
ることもできます。プログラム名の付け方は、「識別子」のトピックをご覧くだ
さい。プログラムは、誰もが判りやすい名前を付けるようお勧めします。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 52
■変数宣言の種類
プログラムのローカル変数宣言の種類は次のとおりです。
分類 VAR**の種類 呼称
VAR_INPUT 入力引数
VAR_IN_OUT 入出力引数
引数
VAR_OUTPUT 出力引数
VAR 静的変数(Static)
VAR CONSTANT 定数(Static)
内部変数
VAR_TEMP 一時変数(Temporary)
■引数と外部参照の違い
プログラム外部のデータ、すなわちグローバル変数や I/O 変数を参照するとき、
引数で参照すれば、引数に値を与えるのは、プログラム外部の記述ですから、
プログラムを変更する必要がありません。一方、グローバル変数や I/O 変数、
すなわち外部変数をプログラム内で直接使用すれば、この変数の名前、型、ア
ドレスが変われば、プログラムを変更する必要が生じます。外部変数を一切使
わないプログラムは、再利用性、再配置性がもっとも高くなります。むろん、
再利用、再配置を見込まないプログラムで、この完全性を追求しても意味があ
りませんので、この点は適宜判断して使いわけることをお勧めします。
■3つの引数の違い
VAR_INPUT は、プログラムで値を参照し、プログラムで変更しない引数です。
VAR_IN_OUT は、プログラムで値を参照し、かつプログラムで変更する引数
です。
VAR_OUTPUT は、プログラムで変更するだけの引数です。
■3つの内部変数の違い
VAR は、プログラムでは、静的なメモリが確保されます。静的なメモリは、プ
ログラム実行後も値が保持されますので、履歴性のある演算に使用することが
できます。
VAR_TEMP は、一時的なメモリが確保されます。一時的なメモリは、該当プ
ログラムの実行中だけ有効なメモリですので、プログラムが呼び出されてから、
リターンするまでの間だけしか値は有効ではありません。
VAR CONSTANT は、参照するだけの変数、すなわち定数です。プログラムで
変更することはできません。

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 53
■ファンクションブロックの呼び出し
プログラムからファンクションブロックを呼び出すことができます。後述する
ように、ファンクションブロックは、静的な内部変数を持つので、これを呼び
出すプログラム側の静的な内部変数領域に宣言ます。
プログラム
VAREmgTM:TON;
END_VAR
TON
IN Q
PT ET
EmgTM
ファンクションブロック
TON
■ファンクションの呼び出し
プログラムからファンクションを呼び出すことができます。ファンクション自
体は履歴性のない関数ですから、内部変数に宣言する必要はありません。
プログラム
VAR
END_VAR
ADD_INT
ファンクション
ADD_INT

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 54
1.3.4 ファンクションブロック
■ファンクションブロックの構成
引数
内部変数
データ部
コード部
Trigger XFlag MyStatus
MyStatusプログラムコード
VAR_INPUT
Trigger :BOOL; (*トリガ信号 *) XFlag :BOOL; END_VAR VAR MyStatus :BOOL; END_VAR
「ファンクションブロック」は、まず「データ部」と「コード部」に分けられ
ます。データ部は、引数と内部変数からなります。引数とは、一般的な高級言
語のサブルーチン引数と同じように、ファンクションブロックを呼び出す前に、
外部から与えられ、ファンクションブロック実行中にその値(またはポインタ)
を使って演算するために使います。この意味で、引数は「外部に公開されたイ
ンタフェース」と呼ばれることがあります。「内部変数」とは、文字どおり、フ
ァンクションブロック内部だけで使用する変数で、外部に公開されません。
■ファンクションブロック名
ファンクションブロック名は、ファンクションブロックを新規追加するとき、
ユーザが設定します。既にライブラリに登録されているファンクションブロッ
クから選択し再利用をすることもできます。ファンクションブロック名の付け
方は、「識別子」のトピックをご覧ください。ファンクションブロックは、ライ
ブラリとして自動的に共有されますので、誰もが判りやすい名前を付けるよう
お勧めします。
■変数宣言の種類
ファンクションブロックの変数宣言は次のとおりです。
分類 VAR**の種類 呼称
VAR_INPUT 入力引数
VAR_IN_OUT 入出力引数
引数
VAR_OUTPUT 出力引数
VAR 静的変数(Static)
VAR CONSTANT 定数(Static)
内部変数
VAR_TEMP 一時変数 (Temporary)

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 55
■引数と外部参照の違い
ファンクションブロック外部のデータ、すなわちグローバル変数や I/O 変数を
参照するとき、引数で参照すれば、引数に値を与えるのは、ファンクションブ
ロック外部の記述ですから、ファンクションブロックを変更する必要がありま
せん。一方、グローバル変数や I/O 変数、すなわち外部変数をファンクション
ブロック内で直接使用すれば、この変数の名前、型、アドレスが変われば、フ
ァンクションブロックを変更する必要が生じます。外部変数を一切使わないフ
ァンクションブロックは、外部の変数宣言に一切影響されない点で、再利用性、
再配置性がもっとも高くなります。むろん、再利用、再配置を見込まないファ
ンクションブロックで、この完全性を追求しても意味がありませんので、この
点は適宜判断して使いわけることをお勧めします。
■3つの引数の違い
VAR_INPUT は、ファンクションブロックで値を参照し、ファンクションブロ
ックで変更しない引数です。
VAR_IN_OUT は、ファンクションで値を参照し、かつファンクションブロッ
クで変更する引数です。
VAR_OUTPUT は、ファンクションブロックで変更するだけの引数です。
■引数とグラフィックシンボルの関係
引数を適切に宣言すれば、ファンクションブロックのグラフィックシンボルは
自動的に描画されます。
VAR_INPUT IN:INT; CN:INT; END_VAR VAR_IN_OUT TBL:Array[0..255] of BOOL; END_VAR VAR_OUTPUT Q:BOOL; END VAR
ファンクションブロック(FBK) = XBLK プログラム(PRG)
VAR BLK_1:XBLK; END VAR
IN
CN
Q
XBLK
TBL TBL
BLK_1
VAR_INPUT(入力引数)、VAR_IN_OUT(入出力引数)、VAR_OUTPUT
(出力引数)のグラフィック上の配置は次のようになります。それぞれの引数グ
ループ内では、宣言順に配置します。入出力点の合計は 15 点以内でなければな
りません。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 56
VAR_INPUT VAR_OUTPUT
VAR_IN_OUT
■3つの内部変数の違い
VAR は、ファンクションブロックでは、静的なメモリが確保されます。静的な
メモリは、ファンクションブロック実行後も値が保持されますので、履歴性の
ある演算に使用することができます。
VAR_TEMP は、一時的なメモリが確保されます。一時的なメモリは、該当フ
ァンクションブロックの実行中だけ有効なメモリですので、ファンクションブ
ロックが呼び出されてから、リターンするまでの間だけしか値は有効ではあり
ません。
VAR CONSTANT は、参照するだけの変数、すなわち定数です。ファンクショ
ンブロック実行時に値を変更することはできません。

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 57
1.3.5 ファンクション
■ファンクションの構成
引数
内部変数
データ部
コード部 Trigger XFlag MyStatus
MyStatusプログラムコード
FUNCTION XFunc :BOOL; VAR_INPUT
Trigger :BOOL; (*トリガ信号 *) XFlag :BOOL; END_VAR VAR MyStatus :BOOL; END_VAR
関数
XFunc
「ファンクション」は、まず「データ部」と「コード部」に分けられます。デ
ータ部は、関数、引数、内部変数からなります。ファンクションは、プログラ
ムやファンクションブロックと異なり、外部参照はできません。関数とは、演
算結果の戻り値です。ファンクションは、ファンクション名自体が変数で、演
算結果を変数として戻します。引数とは、一般的な高級言語のサブルーチン引
数と同じように、ファンクションを呼び出す前に、外部から与えられ、ファン
クション実行中にその値(またはポインタ)を使って演算するために使います。
この意味で、引数は「外部に公開されたインタフェース」と呼ばれることがあ
ります。内部変数とは、文字どおり、ファンクションブロック内部だけで使用
する変数で、外部に公開されません。またファンクションの内部変数はすべて、
一時的なメモリで、1回の実行時の間しか、値を保持しません。
■ファンクション名
ファンクション名は、ファンクションを新規追加するとき、ユーザが設定しま
す。既にライブラリに登録されているファンクションから選択し再利用をする
こともできます。ファンクション名の付け方は、「識別子」のトピックをご覧く
ださい。ファンクションは、ライブラリとして自動的に共有されますので、誰
もが判りやすい名前を付けるようお勧めします。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 58
■変数宣言の種類
ファンクションの変数宣言は次のとおりです。
分類 VAR**の種類 呼称
関数 FUNCTION 関数
VAR_INPUT 入力引数
VAR_IN_OUT 入出力引数
引数
VAR_OUTPUT 出力引数
内部変数 VAR 一時変数(Temporary)
■ファンクションの特徴
ファンクションは、履歴性のない演算を行う関数です。したがって、内部変数
は一時的なメモリしか割り当てられません。ファンクションは、ひとつの関数
値を返す履歴性のない演算に向いています。一般にファンクションは、メモリ
消費、実行速度の点で、プログラム、ファンクションブロックより優れていま
す。
■3つの引数の違い
VAR_INPUT は、ファンクションで値を参照し、ファンクションで変更しない
引数です。
VAR_IN_OUT は、ファンクションで値を参照し、かつファンクションで変更
する引数です。
VAR_OUTPUT は、ファンクションで変更するだけの引数です。
■引数とグラフィックシンボルの関係
引数を適切に宣言すれば、ファンクションのグラフィックシンボルは自動的に
描画されます。
VAR_INPUT IN:INT; CN:INT; END_VAR VAR_IN_OUT TBL:Array[0..255] of BOOL; END_VAR VAR_OUTPUT Q:BOOL; END VAR
ファンクション(FUN) = XFUN : INT; プログラム(PRG)
VAR END VAR
IN
CN Q
XFUN
TBL TBL
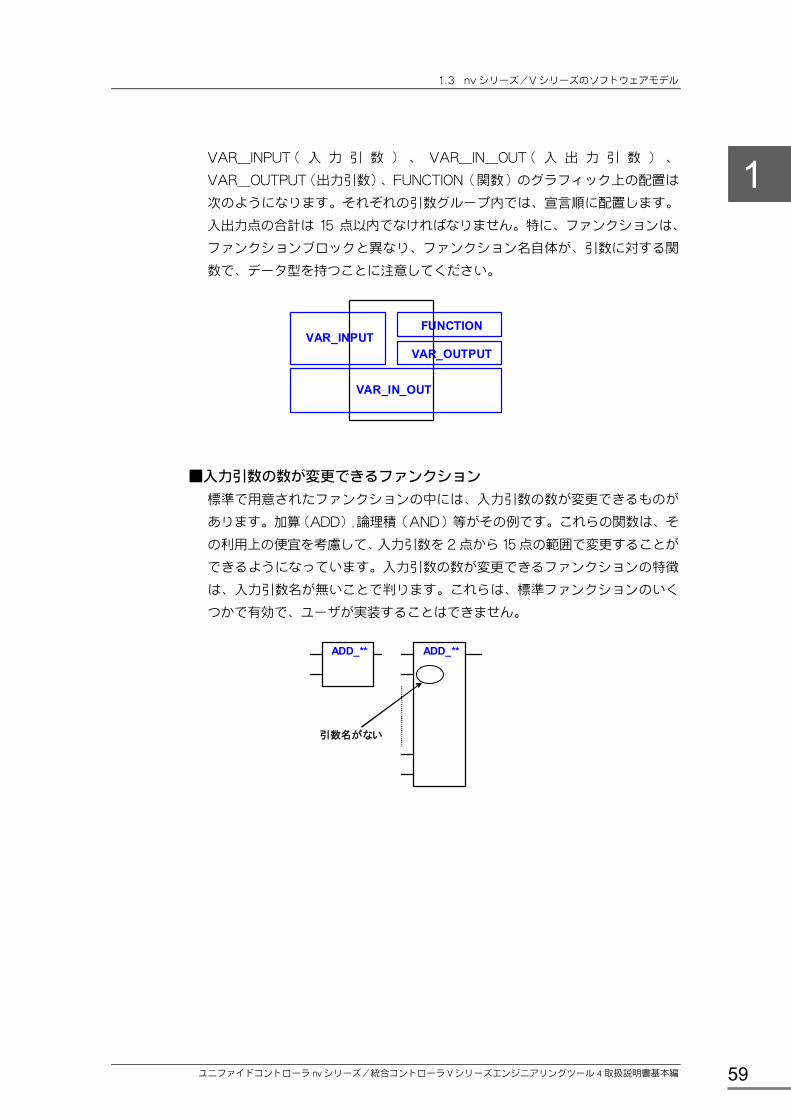
1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 59
VAR_INPUT( 入 力 引 数 ) 、 VAR_IN_OUT( 入 出 力 引 数 ) 、
VAR_OUTPUT(出力引数)、FUNCTION(関数)のグラフィック上の配置は
次のようになります。それぞれの引数グループ内では、宣言順に配置します。
入出力点の合計は 15 点以内でなければなりません。特に、ファンクションは、
ファンクションブロックと異なり、ファンクション名自体が、引数に対する関
数で、データ型を持つことに注意してください。
VAR_INPUT VAR_OUTPUT
VAR_IN_OUT
FUNCTION
■入力引数の数が変更できるファンクション
標準で用意されたファンクションの中には、入力引数の数が変更できるものが
あります。加算(ADD),論理積(AND)等がその例です。これらの関数は、そ
の利用上の便宜を考慮して、入力引数を 2 点から 15 点の範囲で変更することが
できるようになっています。入力引数の数が変更できるファンクションの特徴
は、入力引数名が無いことで判ります。これらは、標準ファンクションのいく
つかで有効で、ユーザが実装することはできません。
ADD_** ADD_**
引数名がない

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 60
■ファンクションの実行制御
通常のファンクションは常にファンクション演算を実行します。
ADD_INT 演算が正常なら、正常値を出力します。 演算が異常なら、異常値を出力します。
入力引数 EN、出力引数 ENO は、特別な引数で、EN が 1(True)のときだけ実
行します。
これを「EN/ENO 付きファンクション」といいます。
ADD_INT
EN ENO
入力引数 EN が 1(True)のとき、ファンクション演算を実行します。
演算が正常なら、出力引数 ENO を 1(True)、かつ正常値を出力。
演算が異常なら、出力引数 ENO を 0(False)、かつ異常値を出力。
入力引数 EN が 0(False)のとき、ファンクション演算を実行しません。
出力引数 ENO を 0(False)にし、暗黙値を出力。
○補足
・ 「異常値」、「暗黙値」はファンクション毎に異なります。詳しくは「命令語編」を参
照してください。

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 61
■ファンクション出力と ST/SET 命令
ファンクション出力に ST(ストア)または SET(セット)命令を使って変数に
格納する動作は次のようになります。
1) 通常のファンクションに ST 命令を接続
正常値または異常値を変数(OutVar)に格納します。
ADD_INT OutVar
ST
2) 通常のファンクションに SET 命令を接続
OutVar は不定です。このような使い方は行わないでください。
ADD_INT OutVar
SET
3) EN/ENO 付きファンクションに ST 命令を接続
正常値、異常値、または暗黙値が変数(OutVar)に格納します。
ADD_INT
EN ENO
OutVar
ST
4) EN/ENO 付きファンクションに SET 命令を接続
EN が 1(True)のときだけ、変数(OutVar)が更新されます。したがって、
変数(OutVar)には正常値または異常値が出力されます。
ADD_INT
EN ENO
OutVar
SET

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 62
さらに、正常値だけで更新される変数としたい場合には、ENO のステータスを
使います。
ADD_INT
EN ENO
VarX
SET
Normal
VarX
SET
OutVar
Normal
■ファンクションの多段接続と実行制御
EN/ENO 付きファンクションを使うと、安全な演算ができ、かつ演算異常のフ
ァンクションを見つけやすくなるという利点があります。次の例は、 終演算
結果(Result)には、正常値だけが格納され、EN のラインが OFF 表示されるこ
とで異常個所が判りやすくなります。
ADD_* MUL_* SUB_* SIN
EN ENO EN ENOEN ENOEN ENO
Work
Normal
Work Result
Normal
Enable
SET

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 63
1.3.6 変数とデータ型
本ツールでは、変数を画面上の表形式で登録します。よって、以下で説明する
宣言形式の一部は登録上必要ではありません。ここでは IEC61131-3 の形式で説
明しています。
■変数宣言の形
一般に変数は、下記のように宣言します。
{VAR**}
{変数名} {:} {データ型名} {;}
{変数名} {:} {データ型名} {;}
{変数名} {:} {データ型名} {;}
{変数名} {:} {データ型名} {;}
{END_VAR}
{ }は説明の都合上のもので、実際には不要です。{:}は、変数名とデータ
型を区切るために使います。{;}は一つの変数宣言の終わりを示します。{変数
名}、{データ型}、{:}、{;}の前後に、スペース、タブ、エンターを任意に
挿入しても構いません。読みやすくするために、タブでインデントを付けるこ
とができます。{VAR**}は、プログラムモジュールや変数の種類により異な
ります。「プログラム」、「ファンクションブロック」、「ファンクション」、「グロ
ーバル変数」のトピックを参照してください。
■変数名
変数名の付け方は、「識別子」のトピックをご覧ください。誰もが判りやすい名
前を付けるようお勧めします。
例 1: 120ABC × 先頭文字が英字でない。
例 2: AB_C ○
例 3: ab_C ○ 例 2,3 は区別されない。
例 4: Function × FUNCTION は IEC61131-3 のキーワード(予約語)。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 64
■変数コメント
変数には、コメントを付けることができます。変数宣言では (* , *) で囲まれた
文字列をコメントと見なします。
VAR
Trigger :Bool ; (*トリガ信号*)
END_VAR
変数のコメントは{ ; }の後に書きます。コメントの長さは 50 バイト(半角は1
バイト、全角は 2 バイト)以下でなければなりません。(* , *)は、ネストする
ことはできません。変数コメントは、コンパイル後、プログラム回路内に表示、
印刷することができます。
■データ型名
変数名の付け方は、「識別子」のトピックをご覧ください。但し、後述する配列
のときは、’ARRAY[ ] OF’句は、文字数の制約に含めません。
例 1: INT ○
例 2: ARRAY[0..255] OF INT ○
例 3: ARRAY[0..128] OF typeX ○
例 4: 0typeUSER × 0typeUSER は識別子の規約に反する

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 65
■データ型
nv シリーズ、および V シリースでサポートしているデータ型は下記のとおりで
す。
大分類 小分類 キーワード データ型 ビット ワード 値の範囲
INT 整数型 16 1 -32768 ~ 32767
UINT 符号なし整数型 16 1 0 ~ 65535
DINT 倍精度整数型 32 2 -2147483648 ~ 2147483647
数値
REAL 実数型 32 2 -3.402823E38 ~ -1.401298E-45 1.401298E-45 ~ 3.402823E38
BOOL ブール型 1 - 0(False),1(True)
WORD 長さ 16 のビット列型 16 1 0000h ~ FFFFh
ビット列
DWORD 長さ 32 のビット列型 32 1 00000000h ~ FFFFFFFFh
文字 STRING 可変長文字列型 16 +String
1 +String
大 64 文字
TIME 継続時間型 32 2 -2147483648 ~ 2147483647 (ms) (596h31m23s647ms)
DATE (省略名 D)
日付け型 32 2 1998-01-01~2097-12-31
TIME_OF_DAY (省略名 TOD)
時刻型 32 2 00:00:00.000~23:59:59.999(補足参照)
DATE_AND_TIME (省略名 DT)
日付けおよび時刻型 64 4 1998-01-01-00:00:00.000~ 2097-12-31-23:59:59.999 (補足参照)
PTR ポインタ型 - - -
基本型
時間
PTRB ビットポインタ型 - - -
配列 ARRAY [*..*] OF
配列 - - -
構造体 任意 構造体 - - -
派生型
混合 任意 配列と構造体の組み合わせ
- - -
○補足
・ ツールで表示・設定ができる範囲とは異なります。時刻型については上記の有効範囲で使用し
てください。
■配列宣言の仕方
任意のデータ型の配列を宣言することができます。配列を宣言するには、
ARRAY[ ] OF 句を使います。[ ]内には、添え字の下限と上限を{..}で区切
って明示します。
例: VAR
MyTable: ARRAY [0..255] OF INT;
(*配列 MyTable を 256 の整数要素で宣言*)
END_VAR

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 66
■配列宣言の制約 配列名 変数名の制約と同じ
次元数 1次元のみ
要素個数 1-65536
添字範囲 0-65535
添字下限 0 固定
生成方法 設計時に大きさを決定する静的配列
○補足
・ 配列の大きさは、変数の宣言場所(プログラム、ファンクション、ファンクション、グローバ
ル変数 etc)のメモリの大きさで、さらに制約されることがあります。
■配列の変数表記
配列宣言された変数は、添え字を付けて使います。添え字は、添え字範囲の定
数か、インデクス変数でなければなりません。添字は各カッコ [ ]で囲みます。
例: MyTable[0]
MyTable[255]
MyTable[XI]
■インデクス変数
インデクス変数は、インデクス修飾専用の変数です。一般の変数を配列の添字
として使うことはできません。
インデクス変数 データ型
XI DINT
XJ DINT
XK DINT
XL DINT
XM DINT
XN DINT
XP DINT
XQ DINT
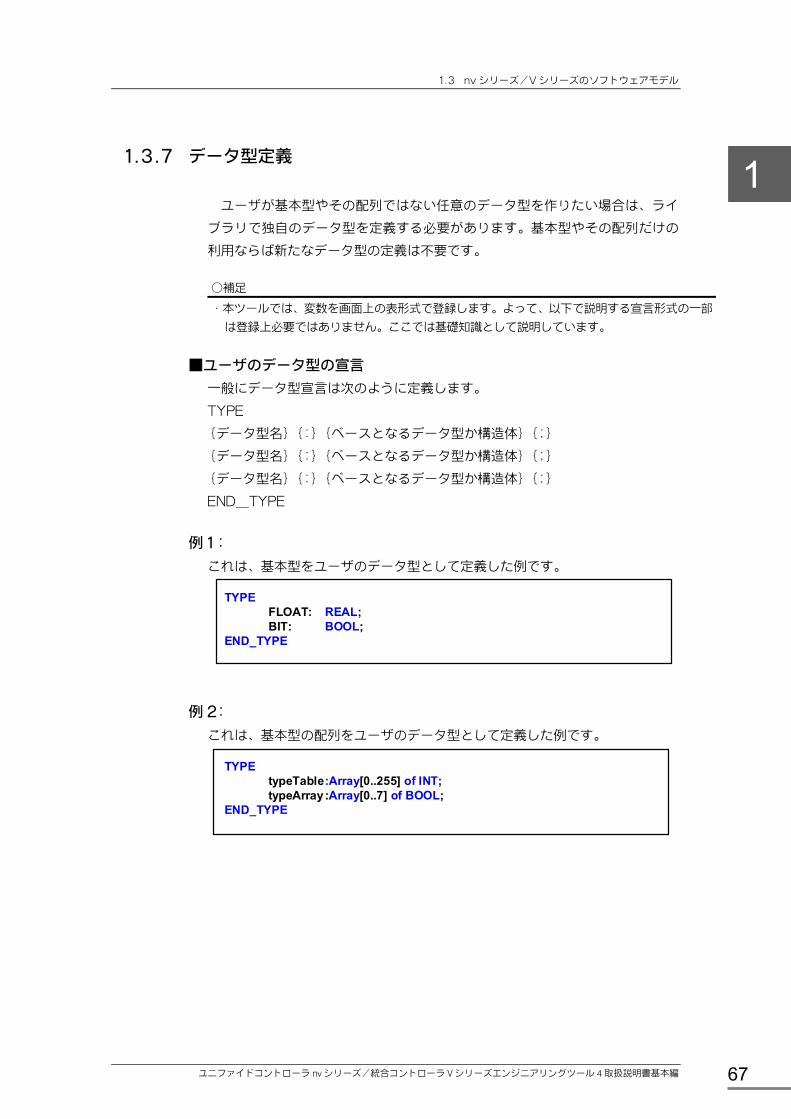
1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 67
1.3.7 データ型定義
ユーザが基本型やその配列ではない任意のデータ型を作りたい場合は、ライ
ブラリで独自のデータ型を定義する必要があります。基本型やその配列だけの
利用ならば新たなデータ型の定義は不要です。
○補足
・本ツールでは、変数を画面上の表形式で登録します。よって、以下で説明する宣言形式の一部
は登録上必要ではありません。ここでは基礎知識として説明しています。
■ユーザのデータ型の宣言
一般にデータ型宣言は次のように定義します。
TYPE
{データ型名} {:} {ベースとなるデータ型か構造体} {;}
{データ型名} {:} {ベースとなるデータ型か構造体} {;}
{データ型名} {:} {ベースとなるデータ型か構造体} {;}
END_TYPE
例 1:
これは、基本型をユーザのデータ型として定義した例です。 TYPE FLOAT: REAL; BIT: BOOL; END_TYPE
例 2:
これは、基本型の配列をユーザのデータ型として定義した例です。 TYPE typeTable :Array[0..255] of INT; typeArray :Array[0..7] of BOOL; END_TYPE

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 68
例 3:
ここでは、構造体を使って、ユーザのデータ型 typeMOTOR ,typeX を定義し
ています。STRUCT - END_STRUCT は構造体といい、複数の型を組み合わせ
て一つの型にするときに使います。
TYPE typeX: STRUCT B :Array[0..15] Of BOOL; END_STRUCT; typeMOTOR: STRUCT RUN :BOOL; RUNNING :BOOL; OL :BOOL; SET :DINT; FB :DINT; STATUS :Array[0..15] Of BOOL; END_STRUCT; END_TYPE
例 4:
ベースとなるデータ型は、基本型や配列だけでなく、独自に定義した型を使う
こともできます。
TYPE typeX: STRUCT B :Array[0..15] Of BOOL; END_STRUCT; typeMOTOR: STRUCT RUN :BOOL; RUNNING :BOOL; OL :BOOL; SET :DINT; FB :DINT; STATUS :typeX; END_STRUCT; END_TYPE

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 69
■循環参照の禁止
次のような宣言では、typeX,typeMOTOR は互いに依存しており、データ型の
大きさや配置を決定することができません。このような、いわゆる循環参照が
あるデータ型の宣言はできません。
TYPE typeX: STRUCT B :Array[0..15] Of typeMOTOR; END_STRUCT; typeMOTOR: STRUCT RUN :BOOL; RUNNING :BOOL; OL :BOOL ; SET :DINT; FB :DINT; STATUS :typeX; END_STRUCT; END_TYPE
■ユーザのデータ型を使った変数の宣言と表記
例1から4で定義した型を使った変数の宣言と、プログラム内での変数表記例
は次のとおりです。
No. 変数宣言例 変数表記例
1 VAR X:FLOAT; Y:Array[0..255] of BIT; END_VAR
X Y[255] Y[XP]
2 VAR X:typeTable; Y:typeArray; END_VAR
X[0] Y[XJ]
3 VAR X:typeX; Motor:Array[0..15] Of typeMotor; END_VAR
X.B[15] Motor[1].SET Motor[XK].STATUS[XJ]
4 VAR X:typeX; Motor:Array[0..15] Of typeMotor; END_VAR
X.B[15] Motor[1].SET Motor[XK].STATUS.B[XJ]

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 70
1.3.8 標準のデータ型宣言
nv シリーズおよび、V シリーズの標準として、いくつかのデータ型を用意し
ています。その内容と用途は次のとおりです。
これらのデータ型の定義は「ライブラリ」で見ることができます。
■共通 データ型 用途
TYPE_ACT SFC の ACTION 命令の構造体
TYPE_ACT_T SFC の ACTION 命令(タイマ付き)の構造体
TYPE_STEP SFC の STEP 命令の構造体
TYPE16BITS 16 ビット列の構造体
TYPESTN_CNF 通信ファンクションブロックの構造体
TYPETCP_CLOSE 通信ファンクションブロックの構造体(TCP)
TYPETCP_OPEN 通信ファンクションブロックの構造体(TCP)
TYPETCP_RCV 通信ファンクションブロックの構造体(TCP)
TYPETCP_SEND 通信ファンクションブロックの構造体(TCP)
TYPEUDP_CLOSE 通信ファンクションブロックの構造体(UDP)
TYPEUDP_OPEN 通信ファンクションブロックの構造体(UDP)
TYPEUDP_RCV_BC 通信ファンクションブロックの構造体(UDP)
TYPEUDP_SEND_BC 通信ファンクションブロックの構造体(UDP)
■V シリーズの MCS 型 L コントローラ データ型 用途
TYPEC_DATA カウンタのデータ構造体
TYPEC_PARA カウンタのパラメータ構造体
TYPEF_DATA 伝送データ(実数)のデータ構造体
TYPEF_PARA 伝送データ(実数)のパラメータ構造体
TYPEGD_DATA ガイダンスのデータ構造体
TYPEHEAD TAG のヘッダ構造体
TYPEI_DATA 伝送データ(整数)のデータ構造体
TYPEI_PARA 伝送データ(整数)のパラメータ構造体
TYPELP_DATA 調節計のデータ構造体
TYPELP_PARA 調節計のパラメータ構造体
TYPEP_RARA 折れ線のデータ構造体
TYPEPB_DATA 押しボタンのデータ構造体
TYPEPB_PARA 押しボタンのパラメータ構造体
TYPEPV_DATA 指示計のデータ構造体
TYPEPV_PARA 指示計のパラメータ構造体
TYPESQ_DATA シーケンス操作器のデータ構造体
TYPESQ_PARA シーケンス操作器のパラメータ構造体
TYPET_DATA タイマのデータ構造体
TYPET_PARA タイマのパラメータ構造体
TYPEVB_DATA バッチデータの構造体
TYPEXY 折れ線のメンバー構造体

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 71
■V シリーズの DS 型 L コントローラおよび、nv シリーズの type2 データ型 用途
TYPEALIT_32BIT 32 ビット列のアラーム構造体
TYPEALM_MASK_BIT ユーザシステムアラームマスクビット構造体(全体)
TYPEC_DATA_DS カウンタのデータ構造体
TYPEC_PARA_DS カウウンタのパラメータ構造体
TYPEDB_PARA_DS データ設定器のパラメータ構造体
TYPEEXST_32BIT 32 ビット列のマスク構造体
TYPEG_ALM_BIT_N ユーザシステムアラーム故障ビット構造体
TYPEG_MASK_BIT ユーザシステムアラームマスクビット構造体
TYPEHEAD_DS TAG のヘッダ構造体
TYPELP_DATA_DS 調節計のデータ構造体
TYPELP_RARA_DS 調節計のパラメータ構造体
TYPEP_PARA_DS 折れ線のパラメータ構造体
TYPEPB_DATA_DS 押しボタンのデータ構造体
TYPEPB_PARA_DS 押しボタンのパラメータ構造体
TYPEPV_DATA_DS 指示計のデータ構造体
TYPEPV_PARA_DS 指示計のパラメータ構造体
TYPERTT_HEAD_DS DS スキャンのヘッダ構造体
TYPERTT_PARA_DS DS スキャンのパラメータ構造体
TYPESQ_DATA_DS シーケンス操作器のデータ構造体
TYPESQ_PARA_DS シーケンス操作器のパラメータ構造体
TYPET_DATA_DS タイマのデータ構造体
TYPET_PARA_DS タイマのパラメータ構造体
TYPETC_DATA_DS 時間計のデータ構造体
TYPETC_PARA_DS 時間計のパラメータ構造体
■計装 FB データ型 用途
TYPEDCL_PARA DCL(ダブルクロスリミット)命令のパラメータ構造体
TYPEFF_PARA FF(フィードフォワード)命令のパラメータ構造体
■V シリーズの S コントローラ データ型 用途
TYPEPID3_LP_P PID3 の構造体
TYPEPID3_PV_D PID3 の構造体
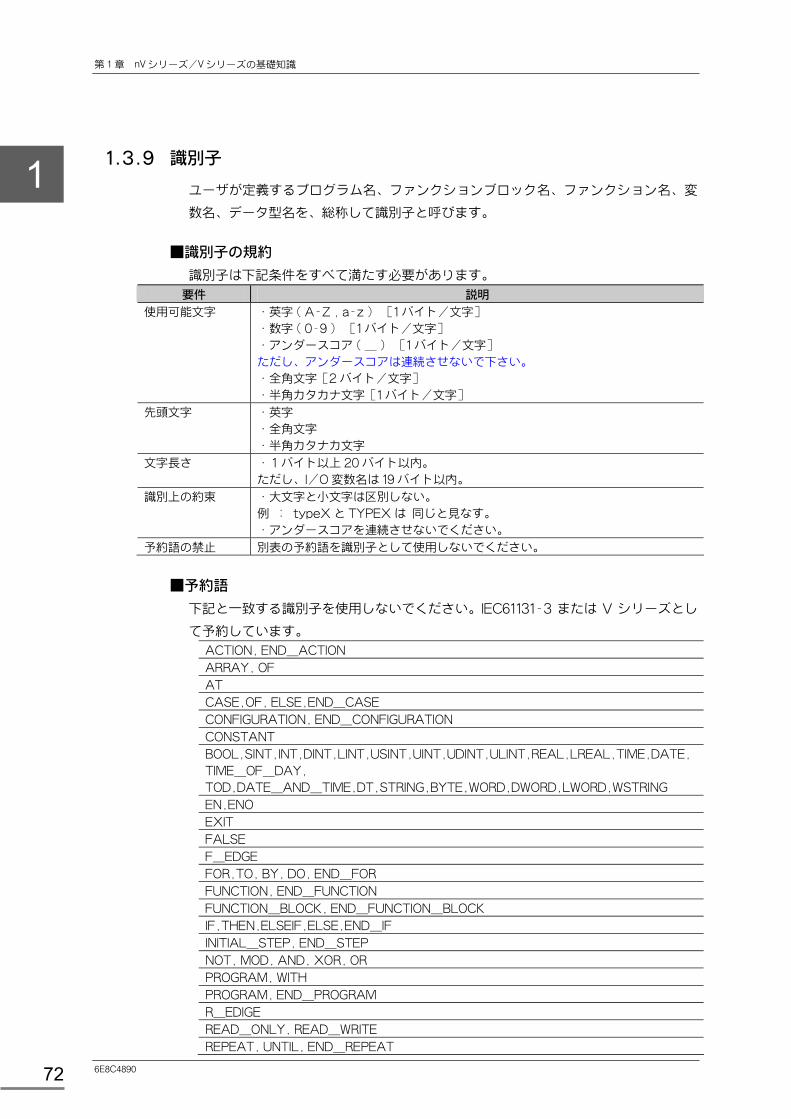
第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 72
1.3.9 識別子
ユーザが定義するプログラム名、ファンクションブロック名、ファンクション名、変
数名、データ型名を、総称して識別子と呼びます。
■識別子の規約
識別子は下記条件をすべて満たす必要があります。
要件 説明
使用可能文字 ・英字( A-Z , a-z ) [1 バイト/文字] ・数字( 0-9 ) [1 バイト/文字] ・アンダースコア( _ ) [1 バイト/文字] ただし、アンダースコアは連続させないで下さい。 ・全角文字[2 バイト/文字] ・半角カタカナ文字[1 バイト/文字]
先頭文字 ・英字 ・全角文字 ・半角カタナカ文字
文字長さ ・1バイト以上 20 バイト以内。 ただし、I/O 変数名は 19 バイト以内。
識別上の約束 ・大文字と小文字は区別しない。 例 : typeX と TYPEX は 同じと見なす。 ・アンダースコアを連続させないでください。
予約語の禁止 別表の予約語を識別子として使用しないでください。
■予約語
下記と一致する識別子を使用しないでください。IEC61131-3 または V シリーズとし
て予約しています。
ACTION, END_ACTION
ARRAY, OF
AT
CASE,OF, ELSE,END_CASE
CONFIGURATION, END_CONFIGURATION
CONSTANT
BOOL,SINT,INT,DINT,LINT,USINT,UINT,UDINT,ULINT,REAL,LREAL,TIME,DATE,TIME_OF_DAY, TOD,DATE_AND_TIME,DT,STRING,BYTE,WORD,DWORD,LWORD,WSTRING
EN,ENO
EXIT
FALSE
F_EDGE
FOR,TO, BY, DO, END_FOR
FUNCTION, END_FUNCTION
FUNCTION_BLOCK, END_FUNCTION_BLOCK
IF,THEN,ELSEIF,ELSE,END_IF
INITIAL_STEP, END_STEP
NOT, MOD, AND, XOR, OR
PROGRAM, WITH
PROGRAM, END_PROGRAM
R_EDIGE
READ_ONLY, READ_WRITE
REPEAT, UNTIL, END_REPEAT

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 73
RESOURCE, ON, END_RESOURCE
RETAIN
RETURN
STEP, END_STEP
STRUCT,END_STRUCT
TASK
TRANSITION, FROM, TO, END_TRANSITION
TRUE
TYPE, END_TYPE
VAR, END_VAR
VAR_INPUT, END_VAR
VAR_OUTPUT, END_VAR
VAR_IN_OUT, END_VAR
VAR_EXTERNAL, END_VAR
VAR_ACCESS, END_VAR
VAR_GLOBAL, END_VAR
WHILE, DO, END_WHILE
WITH
XI,XJ,XK,XL,XM,XN,XP,XQ
{既存のプログラム名}
{既存のファンクションブロック名}
{既存のファンクション名}
{既存の変数名}
{既存のデータ型名}
1.3.10 プログラミング言語
nv シリーズおよび、V シリーズのコントローラでサポートしているプログラミング
言語は次のとおりです。
1)ラダー・ダイヤグラム (LD:Ladder Diagram)
2)ファンクションブロック・ダイヤグラム (FBD:Function Block Diagram)
3)シーケンシャルファンクションチャート (SFC:Sequential Function Chart)
4)ストラクチャードテキスト (ST:Structured Text)
プログラム、ファンクション、またはファンクションブロックのプログラムコード
は、これらのプログラミング言語を使って表記します。
○補足
・LD,FBD,SFC の個々の命令語については、「命令語編」を参照してください。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 74
1.3.11 ラダーダイヤグラム(LD)
ラダーダイヤグラム(LD)は、接点とコイルからなるリレー制御回路を模擬するグラ
フィック言語です。接点、コイルの他に、左母線、水平接続線、右母線、垂直接続線、
変数、即値、ファンクションブロック、ファンクション、変数コメント、自由コメン
トの要素からなります。2つの母線間に電源を接続しリレー制御回路を動作させるこ
とから、そのデータの流れをパワーフローといいます。パワーフローは、基本的に左
から右、上から下へ流れると解釈して、実行順を自動的に決定します。
OpenPB ClosePB Open
Close OpenPB ClosePB
Open Close OpenMem
OpenMem
Close Open CloseMem
CloseMem
OpenMem Opened OpenAlart tmOpen
TON
CloseMem Closed CloseAlart tmClose
TON
T#5s
T#5s
Opened Closed LSAlart tmLS
TON
T#5sOpened Closed
左母線 右母線水平接続線
垂直接続線
接点 コイル
ファンクションまたはファンクションブロック
変数
即値
プログラムコード
<1> <2> <3>
<4> <5> <6>
<7>
<8>
<9> <10>
<11>
<12>
<13> <14>
<15> <16>
<17>
<18> <19>
<20> <21>
<22>
<23> <24>
<25> <26>
<27> <28> <29>
<30> <31>
開警報出力
閉警報出力
閉記憶
変数コメント
自由コメント
開閉警報出力
○補足
・パワーフローは、後述する「プログラムエディタ」でモニタすることができます。
・自動的に決定された実行順は、後述する「プログラムエディタ」で見ることができます。
・上記例の実行順序は<>マークで記しています。
・個々の命令語については、「命令語編」を参照してください。

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 75
1.3.12 ファンクション・ブロック・ダイヤグラム(FBD)
ファンクション・ブロック・ダイヤグラム(FBD)は、ファンクションとファンクシ
ョンブロックを使った信号やデータ処理を行うグラフィック言語です。ファンクショ
ンとファンクションブロックの他に、水平接続線、垂直接続線、ロード、ストア、セ
ット、変数、即値、変数コメント、自由コメントからなります。データは、基本的に
左から右、上から下へ流れると解釈して、実行順を自動的に決定します。
Oil_level 水平接続線
垂直接続線
ファンクション 変数
プログラムコード
LD
変数コメント
自由コメント
GE_REAL RS S
R1
Q
LE_REAL
RS_1
SUB_REAL Oil_level
LD
LevelH
DeadBand
Level_Alart
ST
ファンクションブロック
オイルレベル
オイルレベル警報 レベル警報
<1>
<2>
<3>
<4> <5>
<6>
<7> <8>
<9> <10>
○補足
・データフローは、後述する「プログラムエディタ」でモニタすることができます。
・自動的に決定された実行順は、後述する「プログラムエディタ」で見ることができます。
・上記例の実行順序は<>マークで記しています。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 76
1.3.13 シーケンシャル・ファンクション・チャート(SFC)
シーケンシャル・ファンクション・チャート(SFC)は、順序シーケンスを行うための
グラフィカル要素です。イニシャルステップ、ステップ、トランジション、ステップ
接続線、条件分岐線、並列実行線、変数、変数コメント、自由コメントからなります。
トランジション条件、ステップでの動作は、LD,FBD 言語を混在して記述することが
できます。
条件分岐線
ステップ接続線
ステップ
変数
プログラムコード
変数コメント
自由コメント
ステップジャンプ
これは、貯蔵タンク T-311 への搬送ラインシーケンス
TON
X1
トランジション
X1 選択信号
並列実行線
イニシァルステップ

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 77
1.3.14 ストラクチャードテキスト(ST)
ストラクチャードテキスト(ST)は、PASCAL や C 言語に似た構造化テキス
ト言語です。変数、定数、演算子、代入文、IF 文、CASE 文、FOR 文、WHILE
文、REPEAT 文、ファンクションやファンクションブロックのコール文などを
サポートしています。
エンジニアリングツール2ではサポートしていません。
(* 初期化 *) XO[0]:=XOUT; (* 出力値 *) XU[0]:=XIN; (* 入力値 *) XOUT:=B[0]*XIN; (* 条件文 *) IF RUN THEN FOR XI:=M TO 0 BY -1 DO XOUT:=XOUT+A[XI]*XO[XI]; REPEAT A[XJ]:=A[XJ]+XO[XI]; UNTIL A[XJ]<100 END_REPEAT; END_FOR; ELSE WHILE XIN<100 DO XOUT:=XOUT+A[XI]; IF XOUT>200 THEN EXIT; END_IF; END_WHILE; END_IF; CASE XK OF 0..9: (* ファンクション *) XOUT:=FUN_XOUT(XIN,XK); 10,20: (* ファンクションブロック *) FBK_XIN_1(XIN,XK); XOUT:=FBK_XIN_1.OUT; END_CASE;
プログラムコード
WHILE 文
FOR 文
IF 文
代入文
自由コメント
EXIT 文
CASE 文
ファンクションコール文
ファンクションブロックコール文
演算子
■変数とデータ型
ST で使用できる変数とデータ型については、「第1章 V シリーズの基礎知識」の
「1.3.6 変数とデータ型」を参照して下さい。
ST では、ブール型の定数として、’TRUE’(=1),’FALSE’(=0)が使用できます。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 78
■構文
ST では、以下の構文が使用できます。
○補足
・構文の動作については、「命令語編」を参照してください。
構文 文法 補足
代入文 (変数):=(式) (式)は、変数、定数、ファンクションコール文または、演算子を使った計算式を記述できます。
ファンクションコール文
FUN_NAME((式), (式), (式), …); FUN_NAME は、ファンクション名を記述してください。
ファンクションブロックコール文
FBK_INSTANSE_NAME((式), (式), (式), …);
FBK_INSTANSE_NAME は、ファンクションブロックの変数名を記述してください。
IF 文 IF (条件式) THEN (文) ELSEIF (条件式) THEN (文) ELSE (文) END_IF;
(条件式)は、結果がブール型になる変数、定数、ファンクションコール文または、演算子を使った計算式を記述できます。 (文)は、代入文、IF 文など、他の構文を記述できます。
CASE 文 CASE (Index) OF (比較データ): (文) (比較データ),(比較データ): (文) (比較データ)..(比較データ): (文) ELSE (文) END_CASE;
(Index)は、インデックス変数を記述してください。 (比較データ)は、整数型の定数を記述してください。
FOR 文 FOR (Index):=(Min) TO (Max) BY (Step) DO (文) END_FOR;
(Index)は、インデックス変数を記述してください。 (Min),(Max),(Step)は、初期値、
終値、増分を記述してください。
WHILE 文 WHILE (条件式) DO (文) END_WHILE;
REPEAT 文 REPEAT (文) UNTIL (条件式) END_WHILE;
EXIT 文 EXIT; EXIT 文は、FOR 文、WHILE 文または、REPEAT 文の中で記述してください。
RETURN 文 RETURN;
○補足
・インデックス変数については、「1.3.6 変数とデータ型」を参照してください。

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 79
○補足
・ファンクションコール文において、ファンクションの入出力引数、出力引数および、4
バイトを超える戻り値は、入力引数として与えてください。与える引数の順番は以下の
とおりです。
1:VAR_INPUT
2:VAR_IN_OUT
3:VAR_OUTPUT
4:FUNCTION(4 バイトを超える場合)
上図のファンクションの場合、ST のファンクションコール文は以下のようにな
ります。
XFUN(INTX,UINTX,STRX,REALX,ARYX);
○補足
・ファンクションコール文において、入出力引数および、4 バイトを超えるファンクショ
ンブロックの出力引数は、入力引数として与えてください。与える引数の順番は以下の
とおりです。
1:VAR_INPUT
2:VAR_IN_OUT
3:VAR_OUTPUT(4 バイトを超える場合)
上図のファンクションブロックの場合、ST のファンクションブロックコール文
は以下のようになります。
BLK_1(INTX,UINTX,STRX,ARYX);

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 80
■演算子
ST では、以下の演算子が使用できます。
演算子 意味 優先順位
(…) 括弧式 1
NOT, ~ 論理否定 2 ** べき乗 3 * 乗算 4
/ 除算 4
MOD 剰余 4
+ 加算 5
- 減算 5
<, >, <=, >=
比較 6
=, <> 等式、不等式 7
AND, & 論理積 8
XOR 排他的論理和 9
OR 論理和 10
○補足
・同じ優先順位の演算子を混在した場合は、左側に記述された演算を優先して行います。
例 1: XO:=A * B + (C - D) / E;
上記の式の場合、以下の順に演算されます。
①: A * B
②: (C - D)
③: ② / E
④: ① + ③
例 2: IF A >= 0 AND B < 100 THEN
上記の条件式の場合、以下の順に演算されます。
①: A >= 0
②: B < 100
③: ① AND ②

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 81
1.3.15 グラフィカル言語の制約
■LD,FBD 言語の結線制約
1)接続線は交差することはできません。
SUB_INT ADD_INT
SUB_INT
2)接続線は、断線することはできません。
3)接続線はショートすることはできません。
4)接続線はループすることはできません。
OR AND
5)異なるデータ型を接続することはできません。
SUB_INT SIN IntegerY
ST
IntegerX
RealX
LD

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 82
6)接続線は BOOL 型以外で合流することはできません。
SUB_INT ADD_INT
SUB_INT
7) 接続線は 4 バイトを超えるデータ型を分岐することはできません。
LEFT StringX StringY
StringZ
○補足
・ 4 バイトを超えるデータ型とは、DATE_AND_TIME(DT)、STRING,PTR,PTRB、
そしてすべての派生型。
8) ファンクションにおいて、すべての入出力端子は、正しく接続しなければな
りません。
ADD X1
X2
9) ファンクションブロックにおいて、4 バイト以内のデータ型の出力引数を除
く、入出力端子は正しく接続しなければなりません。
FBX X1
X2
IN1
IN2
TBL
○補足
・ 4 バイト以内のデータ型とは BOOL、INT、DINT、UINT、REAL、WORD、DWORD、
TIME、 DATE、TIME_OF_DAY(TOD)。
10) コイル出力を結線で囲むことはできません。

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 83
■SET 命令の制約
1) SET 命令は、同じ結線回路の中に、先行する対の命令(GATE 命令、または
EN/ENo Function)がなければなりません。
X1 Y1
LD SET
C1
GATE 命令と SET 命令のペア
EN ENO
ADD_INT SETD1
Q1
EN/ENO Fun と SET 命令のペア
LD SET LD ST
LD SET
LD ST
ST
LD SET
SET
SET
LD SET
ST
EN ENO
ADD_INT SET
EN ENO
ADD_INT SET
SET
ADD_INT SET
TON
SET
TON_1
INC_INT EN ENO
V V SET
TINZ_WORD EN ENO
SET
SET
SET 命令とペアの命令がない。
SET 命令の前で分岐、合流できない
SET 命令の前で分岐、合流できない
SET 命令の前で分岐、合流
できない
SET 命令とペアの命令がない。
SET 命令とペアの命令がない。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 84
■SFC の制約
1) SFC はプログラム、ファクンションブロック、ユーザ定義 ACTION 内での
使用に限られ、FUNCTION 内で使用することはできません。
ファンクション
2) ひとつのプログラム、ファンクションブロック、ユーザ定義 ACTION 内で、
SFC のイニシシャルステップは、 大ひとつでなければなりません。
プログラム
ユーザ定義 ACTIONFB
FB_1
ファンクションブロック

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 85
3) プログラムとそれに含まれるユーザ定義 ACTION は、同じステップを使用す
ることはできません。
プログラム
ユーザ定義 ACTION
S1
S1
4) ファンクションブロックとそれに含まれるユーザ定義 ACTION は、同じステ
ップを使用することはできません。
ファンクションブロック
ユーザ定義 ACTION
S1
S1
5) SFC は、どのシ-ケンス進行ルートを通っても、ステップ--トランジショ
ン--ステップ-- ---- ---ステップ--トランジション--ステップの順
で終結しなければなりません。
S1 S2
S3
S0
S0

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 86
6)条件分岐線は、ステップ-トランジション間から分岐しなければなりません。
S1
S2
S3
S0
S0
S0
7) 条件合流線は、トランジション-ステップ間へ合流しなければなりません。
S1
S2
S3
S0
S0
8) 並列分岐線は、トランジション-ステップ間から分岐しなければなりません。
このトランジションは、複数の後置ステップに対してただひとつ共通としな
ければなりません。
S1
S2
S3
S0
9) 並列合流線は、ステップ-トランジション間へ接続するしなければなりませ
ん。このトランジションは、複数の前置ステップに対してただひとつ共通と
しなければなりません。
S1
S2
S3
S0

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 87
10)並列実行ラインは、ほかの実行ラインと混在できません。
S1 S2
S3
S0
S4
11)並列分岐線、並列合流線はペアで存在し、正しくネストしなければなりませ
ん。
S1 S2
S3
S0
S4
12)ステップジャンプの飛び先は、既存のステップでなければなりません。
S1
S2
S3
S0
S0
S4
13)条件分岐、合流およびステップジャンプは、その同一レベルのシリアルライ
ン内に限られます。上位および下位のシリアルラインに分岐、またはジャン
プすることはできません。
S1 S2
S3
S0
S4
S2

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 88
■SFC の事例
S1
S10
S1
S1
S10
プログラム
○補足
・ 上図のように,SFC のステップが多い場合、ステップジャンプを使って、SFC を分け
て書くことができます。

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 89
1.3.16 制御文の使い方
■制御文とは
制御文は、高級言語の IF 文、FOR 文のように、条件分岐や繰り返し処理を行う命令で
す。V シリーズでサポートしている制御文は次のとおりです。
制御文 命令シンボル
IF 文 [IF] ,[THEN] ,[ELSE] ,[ELSEIF] ,[END_IF]
CASE 文 [CASE],[:],[.. :],[,], [.. ,],[ELSE],[END_CASE]
FOR 文 [FOR_DO],[EXIT],[END_FOR]
WHILE 文 [WHILE],[DO],[EXIT] ,[END_WHILE]
REPEAT 文 [REPEAT],[EXIT],[UNTIL] ,[END_REPEAT]
RETURN 命令 ----<RETURN>
ジャンプ命令 ---->>Label Label:
ブラケット命令 ----[, ]----||
ジャンプコントロール命令
----[JCS]----||, ----[JCR]---||
マスタコントロール命令 ----[MCS]----||, ----[MCR]---||
○補足
・ 「ページ区切り」については、制御文ではありませんが、命令シンボルとして他と類似
する点があるので、このコンテンツの 後で説明しています。
■ネスト制約
1) IF、CASE、FOR、WHILE、REPEAT は互いにネストすることができ、ネスト数に
制約はありません。
2) ブラケット命令,ジャンプコントロール命令は互いにネストすることができ、ネス
ト数に制約はありません。
3) マスタコントロール命令は、ネストすることができません。
4) IF、CASE、FOR、WHILE、REPEAT 等の「ステートメント型構造文」と、ブラン
ケット、ジャンプコントロール、マスタコントロール等の「ネットワーク型構造文」
の混在には次の制約があります。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 90
IF
THEN
END_IF
ステートメント型構造文の中に、ネットワーク型構造文を含むこ
とはできます。
IF
THEN
END_IF ネットワーク型構造文の中に、ステートメント型構造文を含むこ
とはできません。
■IF 文
IF
プログラム
{Condition_1}
THEN
{Action_1}
ELSEIF
{Condition_2}
THEN
{Action_2}
ELSE
{Action_Else}
END_IF
<Condition_1> [Action_1]
<Condition_2> [Action_2]
[Action_Else]
No
No
Yes
Yes
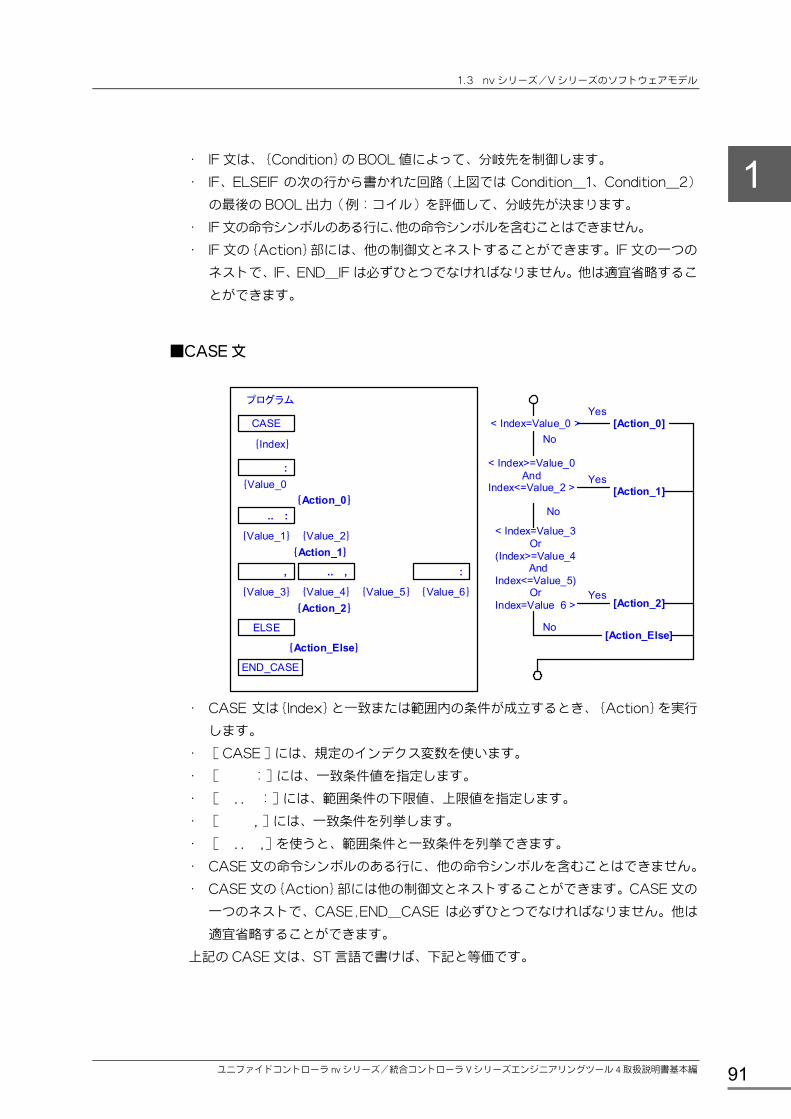
1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 91
・ IF 文は、{Condition}の BOOL 値によって、分岐先を制御します。
・ IF、ELSEIF の次の行から書かれた回路(上図では Condition_1、Condition_2)
の 後の BOOL 出力(例:コイル)を評価して、分岐先が決まります。
・ IF 文の命令シンボルのある行に、他の命令シンボルを含むことはできません。
・ IF 文の{Action}部には、他の制御文とネストすることができます。IF 文の一つの
ネストで、IF、END_IF は必ずひとつでなければなりません。他は適宜省略するこ
とができます。
■CASE 文
CASE
プログラム
{Index}
{Value_0
END_CASE
{Action_0}
ELSE
{Action_Else}
< Index=Value_0 > [Action_0]
< Index>=Value_0 And
Index<=Value_2 >
[Action_2]
[Action_Else]
No
No
Yes
Yes
.. :
{Value_1} {Value_2}
{Action_1}
, .. , :
{Value_3} {Value_4} {Value_5} {Value_6}
{Action_2}
:
< Index=Value_3 Or
(Index>=Value_4 And
Index<=Value_5) Or
Index=Value 6 >
[Action_1]
No
Yes
・ CASE 文は{Index}と一致または範囲内の条件が成立するとき、{Action}を実行
します。
・ [ CASE ]には、規定のインデクス変数を使います。
・ [ :]には、一致条件値を指定します。
・ [ .. :]には、範囲条件の下限値、上限値を指定します。
・ [ , ]には、一致条件を列挙します。
・ [ .. ,]を使うと、範囲条件と一致条件を列挙できます。
・ CASE 文の命令シンボルのある行に、他の命令シンボルを含むことはできません。
・ CASE 文の{Action}部には他の制御文とネストすることができます。CASE 文の
一つのネストで、CASE,END_CASE は必ずひとつでなければなりません。他は
適宜省略することができます。
上記の CASE 文は、ST 言語で書けば、下記と等価です。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 92
CASE {Index} OF
{Value_0} : {Action_0} ; {Value_1} .. [Value_2] : {Action_1} ; {Value_3} , {Value_4} .. {Value_5} , {Value_6} : {Action_2} ; ELSE
{Action_Else} ; END_CASE ;
■FOR 文
FOR_DO
プログラム
{Index}
{Action_1}
[ Index= Min ]
< Index<=Max >
[Action_2]
No
Yes
EXIT [Action_1]
{Min} {Max} {Step}
{Action_2}
END_FOR
[ Index= Index+Step ]
Exit
・ FOR 文は、{Index}を{Min}から{Min}まで増分{Step}でインクリメントし、範
囲内のとき、{Action}を繰り返し処理します。[EXIT]を実行すると、FOR 文の
該当ネストの外に実行を移します。
・ [ FOR_DO ]には、{Index}にインデクス変数、{Min}にインデクス 小値、
{Max}にインデクス 大値、{Step}にインデクス増分値を指定します。
・ FOR 文の命令シンボルのある行に、他の命令シンボルを含むことはできません。
・ FOR 文の{Action}部に、他の制御文をネストすることができます。FOR 文の一つ
のネストで、FOR、END_FOR は必ずひとつでなければなりません。他は適宜省
略することができます。

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 93
■WHILE 文
WHILE
プログラム
{Condition}
< Condition >
[Action_2]
No
Yes
DO [Action_1]
{Action_1}
END_WHILE
Exit
EXIT
{Action_2}
・ WHILE 文は、{Condition}が成立する限り、{Action}回路の処理を繰り返します。
[EXIT] を 実 行 す る と 、 WHILE 文 の 該 当 ネ ス ト の 外 に 実 行 を 移 し ま す 。
{ Condition }には、BOOL 出力を行う条件回路を指定します。
・ WHILE 文の命令シンボルのある行に、他の命令シンボルを含むことはできません。
・ WHILE 文の{Action}部に、他の制御文をネストすることができます。WHILE 文
の一つのネストで、WHILE、END_WHILE は必ずひとつでなければなりません。
他は適宜省略することができます。
■REPEAT 文
REPEAT
プログラム
{Action_1}
< Condition >
[Action_2]
No
Yes
UNTIL
[Action_1]
{Action_2}
END_REPEAT
ExitEXIT
{Condition}
・ REPEAT 文は、まず{Action}を実行し、その後で{Condition}が成立しないとき、
{Action}処理を繰り返します。[EXIT]を実行すると、REPEAT 文の該当ネスト
の外に実行を移します。{ Condition }には、BOOL 出力を行う条件回路を指定し
ます。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 94
・ REPEAT 文の命令シンボルのある行に、他の命令シンボルを含むことはできませ
ん。
・ REPEAT 文の{Action}部に、他の制御文をネストすることができます。REPEAT
文の一つのネストで、REPEAT、END_REPEAT は必ずひとつでなければなりま
せん。他は適宜省略することができます。
■RETURN 命令
プログラム
< Condition >
[Action_1]
No
[Action_0]{ Action_0 }
<RETURN>
{ Action_1 }
Condition
RETURN
Yes
・ RETURN は、直前のビット演算(図では接点)の出力が、True(1)のとき、そのプ
ログラム、ファンクションブロック、またはファンクションから呼び出し元に実行
を移します。RETURN を使わない場合、実行回路の 後で呼び出し元に戻るのが
一般的ですが、上図では、{Condition}が成立すると、{Action_1}を実行するこ
となく、呼び出し元に戻ります。
・ RETURN は、ビット入力の命令語シンボル(例:コイル)のように、回路の要素
として取り扱います。
■ジャンプ命令
プログラム
< Condition >
[Action_1]
No
Yes
[Action_0]{ Action_0 }
>> Emg_1
{ Action_1 }
Condition
Emg_1:
{ Action_2 }[Action_2]
・ ジャンプ( ---->> )は、直前のビット演算(図では接点)の出力が、True(1)の
とき、指定のラベルに制御を移します。

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 95
・ ジャンプ先は、ジャンプ元と同じ POU に限られます。
・ ラベルの行には、他の命令語を含むことはできません。
・ ラベルは数字、文字列いずれでも指定できます。文字列のときは、識別子の約束に
従ってください。
・ ジャンプは、ビット入力の命令語シンボル(例:コイル)のように、回路の要素と
して取り扱います。
■ブラケット命令
プログラム
< Condition >
[Action_1]
Yes
No
[Action_0]{ Action_0 }
{ Action_1 }
Condition
[Action_2]{ Action_2 }
ネットワーク
1) BRKT/BRKTE 命令( [ ] )は、直前のビット演算(図では Condition)が、
True(=1)のとき、{Action_1}を実行します。そうでないとき、{Action_1}
は実行しないで、{Action_2}に移ります。
2) BRKT 命令は、そのネットワーク(注 1)内の 後に実行され、ネットワークの中
で唯一としてください。
3) BRKT/BRKTE 命令はペアで使わなければなりません。
4) BRKT/BRKTE 命令はネストすることができ、そのネスト数の制限はありません。
○補足
・ ネットワークとは、「結線されたプログラム回路の 小単位」を指します。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 96
■ジャンプコントロール命令
プログラム
< Condition >
[Action_1]
No
Yes
[Action_0]{ Action_0 }
{ Action_1 }
Condition
[Action_2]{ Action_2 }
[JCS]
[JCR]
ネットワーク
1) JCS/JCR 命令は、JCR の直前のビット演算(図では Condition)が、True(1)の
とき、JCR の次の処理に実行を移します。
2) JCS 命令は、そのネットワーク(注 1)内の 後に実行され、ネットワークの中で
唯一としてください。
3) JCS/JCR 命令はペアで使わなければなりません。
4) JCS/JCR 命令はネストすることができ、そのネスト数の制限はありません。
5) JCR 命令は母線に直結してください。
■マスタコントロール命令
プログラム
< Condition >
母線 OFF で[Action_1]実行
Yes
No
[Action_0]{ Action_0 }
{ Action_1 }
Condition
[Action_2]
{ Action_2 }
[MCS]
[MCR]
母線 ON で[Action_1]実行
ネットワーク
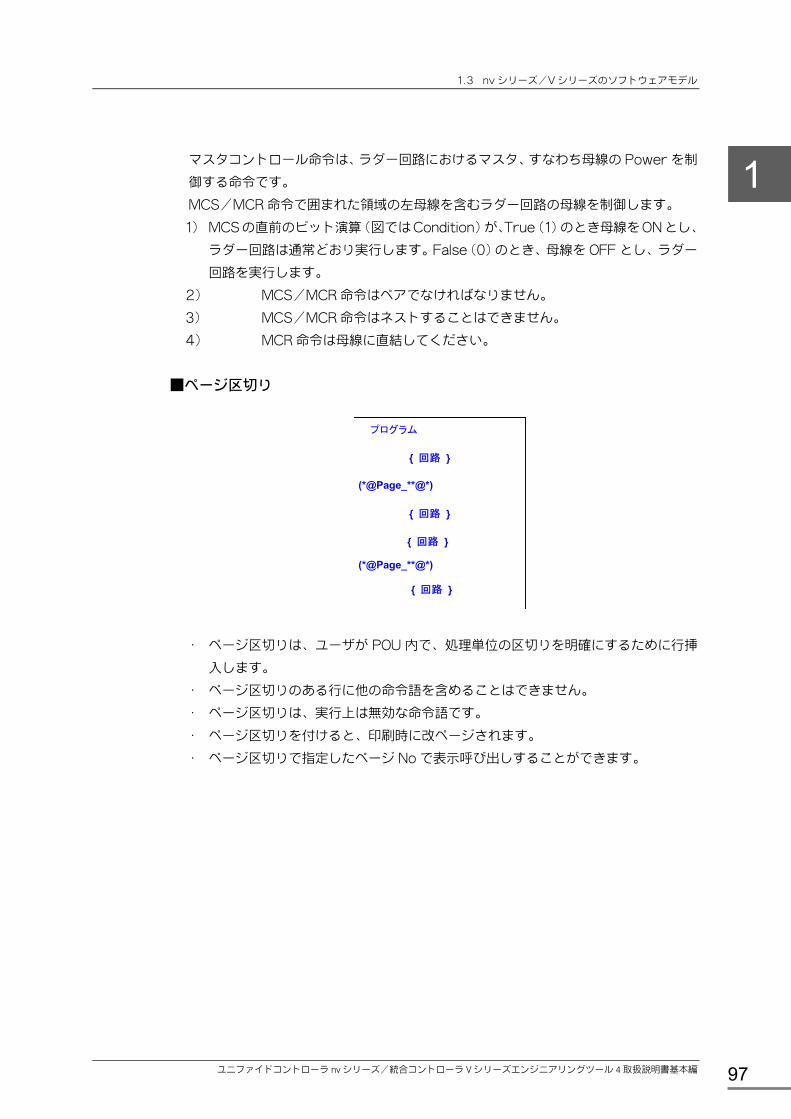
1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 97
マスタコントロール命令は、ラダー回路におけるマスタ、すなわち母線の Power を制
御する命令です。
MCS/MCR 命令で囲まれた領域の左母線を含むラダー回路の母線を制御します。
1) MCS の直前のビット演算(図では Condition)が、True(1)のとき母線を ON とし、
ラダー回路は通常どおり実行します。False(0)のとき、母線を OFF とし、ラダー
回路を実行します。
2) MCS/MCR 命令はペアでなければなりません。
3) MCS/MCR 命令はネストすることはできません。
4) MCR 命令は母線に直結してください。
■ページ区切り
プログラム
{ 回路 }
{ 回路 }
{ 回路 }
(*@Page_**@*)
(*@Page_**@*)
{ 回路 }
・ ページ区切りは、ユーザが POU 内で、処理単位の区切りを明確にするために行挿
入します。
・ ページ区切りのある行に他の命令語を含めることはできません。
・ ページ区切りは、実行上は無効な命令語です。
・ ページ区切りを付けると、印刷時に改ページされます。
・ ページ区切りで指定したページ No で表示呼び出しすることができます。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 98
1.3.17 グラフィカル言語の実行順
本ツールは、グラフィカル言語、すなわち LD,FBD,SFC をひとつの POU(プログ
ラム、ファンクションブロック、ファンクション)内に混在して表記できる特徴を持
っています。これらは、コンパイルされて、コントローラの理解できる命令語コード
に変換されますが、このとき命令語の実行順を自動的に決定しています。ここでは、
この実行順の決定の仕方の概略を解説します。なお、プログラムエディタでは、実行
順の番号を「ステップ No」と呼んでおり、コンパイル後に表示して、確認することが
できます。
■ステートメントと回路 POU
ステートメント 1
ステートメント 1
ステートメント 1
回路 1回路 2
回路 4
回路 3
回路 5
回路 6
回路 7
回路 8
・ 「ステートメント」とは、IF 文、CASE 文、FOR 文、WHILE 文、REPEAT 文、ラ
ベル、ページ区切りの命令語です。これらは、いずれも「その行内に他の命令語を
含むことができない」特徴があります。
・ 「回路」とは、LD、FBD、SFC の命令語で作成した、「結線された命令語の集まり」
の単位です。結合されていない場合は、それぞれ別の回路の一部と見なされます
・ 上図の例をコンパイルすると、コードは下図のように回路をステートメントで挟む
順になります。
・ 回路の実行順は、セルを横書き順に辿り、命令語が早く登場した回路が先になりま
す。

1.3 nv シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 99
POU のコード
ステートメント 1
ステートメント 2
ステートメント 3
回路 1
回路 2
回路 4
回路 3
回路 5
回路 6
回路 7
回路 8
■SFC を含む回路の実行順
SFC を含む回路は、その単位毎に、{条件処理}、{遷移処理}、{動作処理}の実行順
にコンパイルします。
条件処理
遷移処理
動作処理
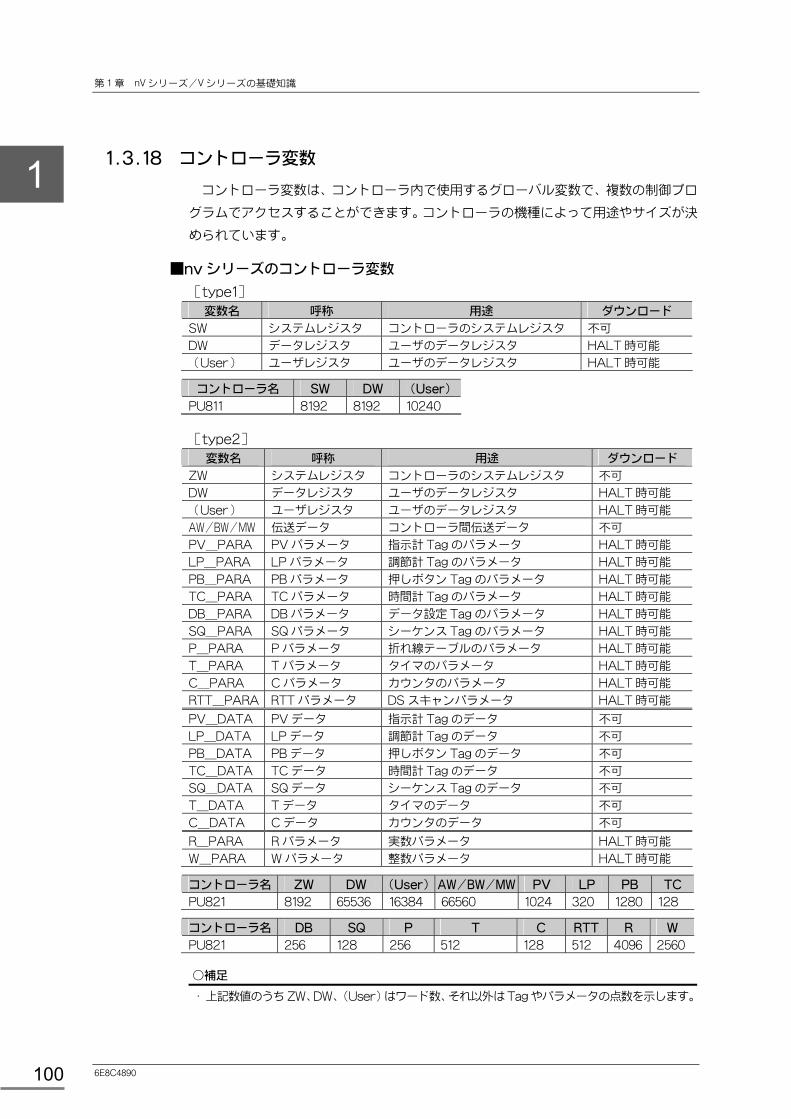
第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 100
1.3.18 コントローラ変数
コントローラ変数は、コントローラ内で使用するグローバル変数で、複数の制御プロ
グラムでアクセスすることができます。コントローラの機種によって用途やサイズが決
められています。
■nv シリーズのコントローラ変数
[type1]
変数名 呼称 用途 ダウンロード
SW システムレジスタ コントローラのシステムレジスタ 不可
DW データレジスタ ユーザのデータレジスタ HALT 時可能
(User) ユーザレジスタ ユーザのデータレジスタ HALT 時可能
コントローラ名 SW DW (User)
PU811 8192 8192 10240
[type2]
変数名 呼称 用途 ダウンロード
ZW システムレジスタ コントローラのシステムレジスタ 不可
DW データレジスタ ユーザのデータレジスタ HALT 時可能
(User) ユーザレジスタ ユーザのデータレジスタ HALT 時可能
AW/BW/MW 伝送データ コントローラ間伝送データ 不可
PV_PARA PV パラメータ 指示計 Tag のパラメータ HALT 時可能
LP_PARA LP パラメータ 調節計 Tag のパラメータ HALT 時可能
PB_PARA PB パラメータ 押しボタン Tag のパラメータ HALT 時可能
TC_PARA TC パラメータ 時間計 Tag のパラメータ HALT 時可能
DB_PARA DB パラメータ データ設定 Tag のパラメータ HALT 時可能
SQ_PARA SQ パラメータ シーケンス Tag のパラメータ HALT 時可能
P_PARA P パラメータ 折れ線テーブルのパラメータ HALT 時可能
T_PARA T パラメータ タイマのパラメータ HALT 時可能
C_PARA C パラメータ カウンタのパラメータ HALT 時可能
RTT_PARA RTT パラメータ DS スキャンパラメータ HALT 時可能
PV_DATA PV データ 指示計 Tag のデータ 不可
LP_DATA LP データ 調節計 Tag のデータ 不可
PB_DATA PB データ 押しボタン Tag のデータ 不可
TC_DATA TC データ 時間計 Tag のデータ 不可
SQ_DATA SQ データ シーケンス Tag のデータ 不可
T_DATA T データ タイマのデータ 不可
C_DATA C データ カウンタのデータ 不可
R_PARA R パラメータ 実数パラメータ HALT 時可能
W_PARA W パラメータ 整数パラメータ HALT 時可能
コントローラ名 ZW DW (User) AW/BW/MW PV LP PB TC
PU821 8192 65536 16384 66560 1024 320 1280 128
コントローラ名 DB SQ P T C RTT R W
PU821 256 128 256 512 128 512 4096 2560
○補足
・ 上記数値のうち ZW、DW、(User)はワード数、それ以外は Tag やパラメータの点数を示します。

1.3 nV シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 101
■V シリーズのコントローラ変数
[S コントローラ]
変数名 呼称 用途 ダウンロード
SW システムレジスタ コントローラのシステムレジスタ 不可
DW データレジスタ ユーザのデータレジスタ HALT 時可能
(User) ユーザレジスタ ユーザのデータレジスタ HALT 時可能
コントローラ名 SW DW (User)
S3PU65 512 4096 10240
S3PU55 512 4096 10240
S3PU45 512 4096 10240
S3PU21 512 4096 10240
S3ST45 512 4096 1024
S2PU72 512 4096 10240
S2PU32 512 4096 10240
S3PU22 512 4096 10240
S2PU72D 512 4096 10240
○補足
・ 上記数値はワード数を示します。
・ ダウンロードとは、該当のグローバル変数全域に初期値を V-Tool からローデイングすること。
「HALT 時可能」とは、コントローラの運転モードが HALT(プログラムの実行停止)時にダ
ウンロードできることを示します。
[L コントローラ(MCS 型)]
変数名 呼称 用途 ダウンロード
ZW システムレジスタ コントローラのシステムレジスタ 不可
(User) ユーザレジスタ ユーザのデータレジスタ HALT 時可能
PV_PARA PV パラメータ 指示計 Tag のパラメータ HALT 時可能
LP_PARA LP パラメータ 調節計 Tag のパラメータ HALT 時可能
PB_PARA PB パラメータ 押しボタン Tag のパラメータ HALT 時可能
SQ_PARA SQ パラメータ シーケンス Tag のパラメータ HALT 時可能
P_PARA P パラメータ 折れ線テーブルのパラメータ HALT 時可能
T_PARA T パラメータ タイマのパラメータ HALT 時可能
C_PARA C パラメータ カウンタのパラメータ HALT 時可能
F_PARA F パラメータ 伝送データ(実数)のパラメータ HALT 時可能
I_PARA I パラメータ 伝送データ(整数)のパラメータ HALT 時可能
PV_DATA PV データ 指示計 Tag のデータ 不可
LP_DATA LP データ 調節計 Tag のデータ 不可
PB_DATA PB データ 押しボタン Tag のデータ 不可
SQ_DATA SQ データ シーケンス Tag のデータ 不可
T_DATA T データ タイマのデータ 不可
C_DATA C データ カウンタのデータ 不可
F_DATA F データ 伝送データ(実数)のデータ 不可
I_DATA I データ 伝送データ(整数)のデータ 不可
R_PARA R パラメータ 実数パラメータ HALT 時可能
W_PARA W パラメータ 整数パラメータ HALT 時可能
GD_DATA GD データ ガイダンスのデータ 不可
VB_DATA VB データ Visual Batch のデータ 不可

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 102
コントローラ名 ZW (User) PV LP PB SQ
L3PU11 8192 16384 1024 256 1024 128
L2PU12 8192 16384 288 96 288 48
L2PU11 8192 16384 128 32 128 16
L1PU12 1024 1024 128 8 32 -
L1PU11 1024 1024 128 8 32 -
LC512 1024 1024 128 8 32 -
LC511 1024 1024 128 8 32 -
コントローラ名 P T C F I R W GD VB
L3PU11 128 512 256 128 128 2048 2048 8 128
L2PU12 48 192 96 48 48 768 768 3 48
L2PU11 48 192 96 48 48 768 768 3 48
L1PU12 16 - - 32 32 128 128 1 -
L1PU11 16 - - 32 32 128 128 1 -
LC512 16 - - 32 32 128 128 1 -
LC511 16 - - 32 32 128 128 1 -
○補足
・ 上記数値のうち ZW、(User)はワード数、それ以外は Tag やパラメータの点数を示します。
・ 上記で「-」のマークは、該当コントローラでサポートされていないことを示します。
[L コントローラ(DS 型)]
変数名 呼称 用途 ダウンロード
ZW システムレジスタ コントローラのシステムレジスタ 不可
DW データレジスタ ユーザのデータレジスタ HALT 時可能
(User) ユーザレジスタ ユーザのデータレジスタ HALT 時可能
AW/BW/ MW
伝送データ コントローラ間伝送データ 不可
PV_PARA PV パラメータ 指示計 Tag のパラメータ HALT 時可能
LP_PARA LP パラメータ 調節計 Tag のパラメータ HALT 時可能
PB_PARA PB パラメータ 押しボタン Tag のパラメータ HALT 時可能
TC_PARA TC パラメータ 時間計 Tag のパラメータ HALT 時可能
DB_PARA DB パラメータ データ設定 Tag のパラメータ HALT 時可能
SQ_PARA SQ パラメータ シーケンス Tag のパラメータ HALT 時可能
P_PARA P パラメータ 折れ線テーブルのパラメータ HALT 時可能
T_PARA T パラメータ タイマのパラメータ HALT 時可能
C_PARA C パラメータ カウンタのパラメータ HALT 時可能
PV_DATA PV データ 指示計 Tag のデータ 不可
LP_DATA LP データ 調節計 Tag のデータ 不可
PB_DATA PB データ 押しボタン Tag のデータ 不可
TC_DATA TC データ 時間計 Tag のデータ 不可
SQ_DATA SQ データ シーケンス Tag のデータ 不可
T_DATA T データ タイマのデータ 不可
C_DATA C データ カウンタのデータ 不可
R_PARA R パラメータ 実数パラメータ HALT 時可能
W_PARA W パラメータ 整数パラメータ HALT 時可能
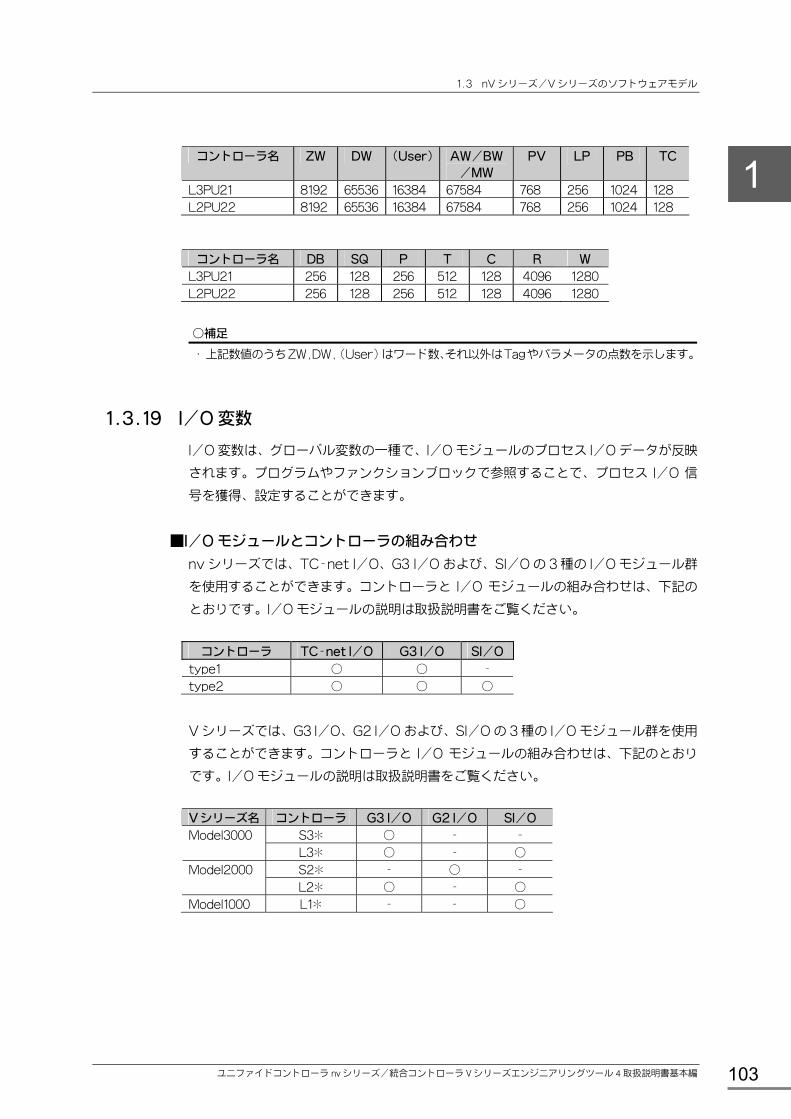
1.3 nV シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 103
コントローラ名 ZW DW (User) AW/BW/MW
PV LP PB TC
L3PU21 8192 65536 16384 67584 768 256 1024 128
L2PU22 8192 65536 16384 67584 768 256 1024 128
コントローラ名 DB SQ P T C R W
L3PU21 256 128 256 512 128 4096 1280
L2PU22 256 128 256 512 128 4096 1280
○補足
・ 上記数値のうちZW,DW,(User)はワード数、それ以外はTagやパラメータの点数を示します。
1.3.19 I/O 変数
I/O 変数は、グローバル変数の一種で、I/O モジュールのプロセス I/O データが反映
されます。プログラムやファンクションブロックで参照することで、プロセス I/O 信
号を獲得、設定することができます。
■I/O モジュールとコントローラの組み合わせ
nv シリーズでは、TC-net I/O、G3 I/O および、SI/O の 3 種の I/O モジュール群
を使用することができます。コントローラと I/O モジュールの組み合わせは、下記の
とおりです。I/O モジュールの説明は取扱説明書をご覧ください。
コントローラ TC-net I/O G3 I/O SI/O
type1 ○ ○ -
type2 ○ ○ ○
V シリーズでは、G3 I/O、G2 I/O および、SI/O の 3 種の I/O モジュール群を使用
することができます。コントローラと I/O モジュールの組み合わせは、下記のとおり
です。I/O モジュールの説明は取扱説明書をご覧ください。
V シリーズ名 コントローラ G3 I/O G2 I/O SI/O
S3* ○ - - Model3000 L3* ○ - ○
S2* - ○ - Model2000 L2* ○ - ○
Model1000 L1* - - ○

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 104
■G3I/O の I/O 変数
G3I/O の I/O 変数の大きさは次のとおりです。
コントローラ I/O 変数のワード数
S3PU65 8192 (8kw)
S3PU55 8192 (8kw)
S3PU45 5120 (5kw)
S3PU21 3072 (3kw)
S3ST45 512 (0.5kw)
I/O 変数のマップは下記のようになります。このマッピングの大きさは暗黙値で、ユー
ザは「I/O コネクション領域変更」にて変更できます。
G3I/O の I/O モジュールにはどのような型を持つのかは、G3I/O の取扱説明書を参
照してください。
4ワード型
8ワード型
20ワード型
TL-F10 型
TL-S20 型
Tc-net10 型
ステーション グローバル型
1268 word
400 word
1000 word
1000 word
1000 word
1000 word
1000 word
I/O 変数
4ワード型の I/Oモジュール
4ワード型の I/Oモジュール
8ワード型の I/Oモジュール
20ワード型の I/Oモジュール
I/Oモジュール
さらに、ツールの「I/O 変数」で、変数名を登録すれば、プログラミングで使用できる
ようになります。
■G2I/O の I/O 変数
G2I/O の I/O 変数の大きさは次のとおりです。
コントローラ I/O 変数のワード数
S2PU72 3072 (3kw)
S2PU32 3072 (3kw)
S2PU22 3072 (3kw)
I/O モジュールのマッピング、I/O 変数のマッピングについては、G3I/O と同等です。

1.3 nV シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 105
■直接入出力変数と一括入出力変数
G2I/O,G3I/O の I/O 変数は、直接入出力変数と一括入出力変数の 2 種類があります。
両者は、同じ容量を持ち、I/O モジュールのマッピングも同じです。直接入出力変数は、
文字どおり、プログラムで読み出し(Load)、書き込み(Store)が行われたときだけ、
実際の I/O モジュールにアクセスして I/O データを獲得します。一方、一括入出力変
数は、スキャン処理型のタスクである HS または MS タスクに同期して I/O データを
獲得します。
ツールの「I/O 変数」で登録した I/O シンボルは、そのまま一括入出力の変数名にな
ります。直接入出力変数名は、その末尾にアンダースコア( _ )を付けた名前になりま
す。
I/Oモジュール I/O 変数
一括入出力変数 X1
直接入出力変数 X1_
プログラム
X1 X1
X1_
I/Oシンボル
プログラムの中でどちらの変数を使うかは、ユーザに委ねられます。一括入出力変数は、
同じプログラム内で何度参照しても、その値は、1スキャン中に変化することがない、
すなわちタスク同期している点で、一般によく使われる変数です。一方、直接入出力変
数は、それを参照するたびに値が更新されます。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 106
■SI/O の I/O 変数
SI/O の I/O 変数の大きさは次のとおりです。
コントローラ I/O 変数のワード数
L3PU21 8192 * 4 (8kw*4)
L3PU11 8192 * 4 (8kw*4)
L2PU22 8192 * 3 (8kw*3)
L2PU12 8192 * 3 (8kw*3)
L2PU11 8192 (8kw)
L1PU12 2048 (2kw)
L1PU11 2048 (2kw)
LC512 2048 (2kw)
LC511 2048 (2kw)
L3,L2 の場合、I/O 変数は SI/O のバス単位で 8kw の容量があります。
L1 の場合、1 ユニット分で 2kw の容量があります。
I/O 変数のマッピングは次のとおりです。
ツールの「I/O 変数」で、変数名を登録すれば、プログラミングで使用できるようにな
ります。(DS 型のときのみ)
・L3、L2 の I/O 変数
入力データ(4096)
出力データ(4096)
ユニット1(256)
ユニット2(256)
ユニット15(256)
ワーク (256)
スロット1(16)
スロット2(16)
スロット14(16)
ワーク(32)
1 バス分の I/O 変数
ワーク(6)
I/O データ(8)
ワーク(2)
・L1 の I/O 変数
入力データ(256)
スロット0(16)
スロット1(16)
スロット14(16)
スロット15 (16)
ワーク(6)
I/O データ(8)
ワーク(2)
1 ユニット分の I/O 変数
ワーク(256)
出力データ(256)
ワーク(1280)
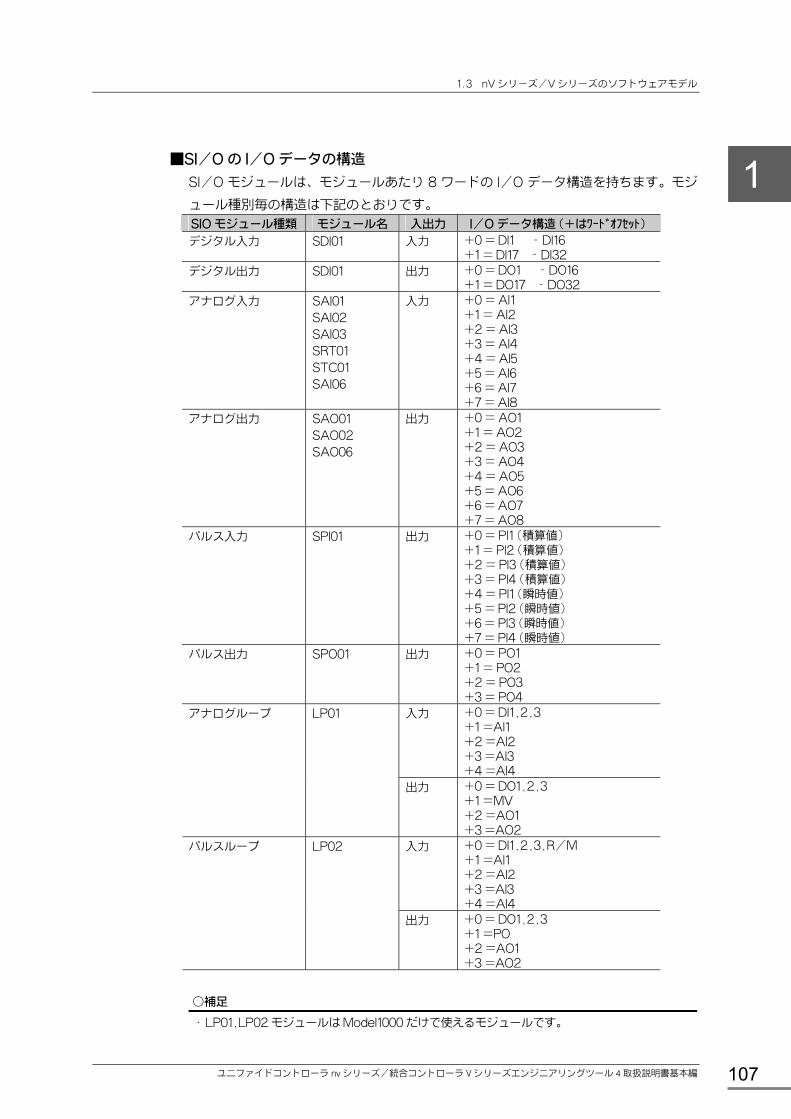
1.3 nV シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 107
■SI/O の I/O データの構造
SI/O モジュールは、モジュールあたり 8 ワードの I/O データ構造を持ちます。モジ
ュール種別毎の構造は下記のとおりです。
SIO モジュール種類 モジュール名 入出力 I/O データ構造(+はワードオフセット)
デジタル入力 SDI01 入力 +0 = DI1 - DI16 +1 = DI17 - DI32
デジタル出力 SDI01 出力 +0 = DO1 - DO16 +1 = DO17 - DO32
アナログ入力 SAI01 SAI02 SAI03 SRT01 STC01 SAI06
入力 +0 = AI1 +1 = AI2 +2 = AI3 +3 = AI4 +4 = AI5 +5 = AI6 +6 = AI7 +7 = AI8
アナログ出力 SAO01 SAO02 SAO06
出力 +0 = AO1 +1 = AO2 +2 = AO3 +3 = AO4 +4 = AO5 +5 = AO6 +6 = AO7 +7 = AO8
パルス入力 SPI01 出力 +0 = PI1(積算値) +1 = PI2(積算値) +2 = PI3(積算値) +3 = PI4(積算値) +4 = PI1(瞬時値) +5 = PI2(瞬時値) +6 = PI3(瞬時値) +7 = PI4(瞬時値)
パルス出力 SPO01 出力 +0 = PO1 +1 = PO2 +2 = PO3 +3 = PO4
入力 +0 = DI1,2,3 +1 =AI1 +2 =AI2 +3 =AI3 +4 =AI4
アナログループ LP01
出力 +0 = DO1,2,3 +1 =MV +2 =AO1 +3 =AO2
入力 +0 = DI1,2,3,R/M +1 =AI1 +2 =AI2 +3 =AI3 +4 =AI4
パルスループ LP02
出力 +0 = DO1,2,3 +1 =PO +2 =AO1 +3 =AO2
○補足
・ LP01,LP02 モジュールは Model1000 だけで使えるモジュールです。

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 108
■SI/O の I/O データの非同期性
SI/O の I/O 変数自体は、SI/O バス独自の周期で自動更新されます。その意味で、タ
スクの実行周期とは非同期です。SI/O の I/O 変数をプログラムの中で直接に参照す
ることは、G3I/O、G2I/O の直接入出力変数をアクセスことと同じになります。プロ
グラムに同期した使い方をするには、プログラム内で一旦、内部変数へロードしてから、
その内部変数をプログラム内で使うなどのユーザ側の配慮が必要です。なお、SI/O の
I/O 変数は、標準の TAG 変数(指示計、調節計、押しボタン)で入出力する場合、コ
ントローラの標準処理で一括入出力されますので、TAG 変数をプログラム内で参照す
る限り、タスクに同期して処理します。
1.3.20 ステーション変数
ステーション変数は、メインモジュール(コントローラ、Ethernet、TC-net 等)
間のでデータの授受を行うための共有メモリです。ステーション内で、同じ変数名でプ
ログラミングできる意味で、「ステーション変数」と称しています。
■データの流れ
共有メモリ
Tasks
Main Module
共有メモリ
Tasks
共有メモリ
Tasks
Main Module Main Module
Station
ステーション変数の実体は、メインモジュール内のメモリで、同じステーション内の他
のメインモジュールから同じ変数名でアクセスすることができます。
■nv シリーズのステーション変数の容量
コントローラ名 共有メモリのワード数
PU811 -
PU821 -
TN8* 524288
EN8* 262144
○補足
・ 上記で「-」のマークは、ステーション変数をサポートしていません。

1.3 nV シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 109
■V シリーズのステーション変数の容量
[Model3000]
コントローラ名 共有メモリのワード数
S3PU65 1024
S3PU55* 1024
S3PU45 1024
S3PU21 -
S3ST45 512
L3PU21 1024
L3PU11 1024
C3PU* 32768
TN7* 524288
CN7* 65535
EN7* 262144
○補足
・ 上記で「-」のマークは、ステーション変数をサポートしていません。
[Model2000]
コントローラ名 共有メモリのワード数
S2PU72 1024
S2PU32 -
S2PU22 -
L2PU22 1024
L2PU12 1024
L2PU11 1024
C2PU* 32768
CN6* 65535
EN6* 262144
○補足
・ 上記で「-」のマークは、ステーション変数をサポートしていません。
[Model1000]
Model1000 は、ステーション変数は有りません。
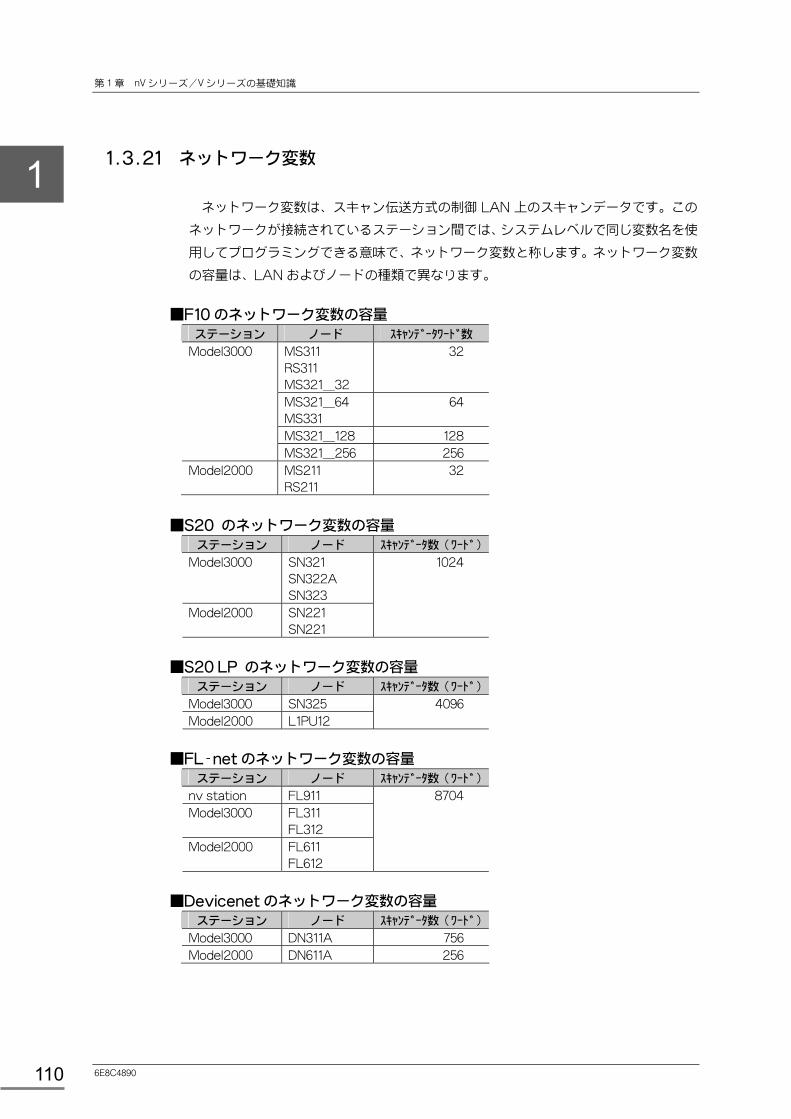
第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 110
1.3.21 ネットワーク変数
ネットワーク変数は、スキャン伝送方式の制御 LAN 上のスキャンデータです。この
ネットワークが接続されているステーション間では、システムレベルで同じ変数名を使
用してプログラミングできる意味で、ネットワーク変数と称します。ネットワーク変数
の容量は、LAN およびノードの種類で異なります。
■F10 のネットワーク変数の容量 ステーション ノード スキャンデータワード数
MS311 RS311 MS321_32
32
MS321_64 MS331
64
MS321_128 128
Model3000
MS321_256 256
Model2000 MS211 RS211
32
■S20 のネットワーク変数の容量 ステーション ノード スキャンデータ数(ワード)
Model3000 SN321 SN322A SN323
Model2000 SN221 SN221
1024
■S20 LP のネットワーク変数の容量 ステーション ノード スキャンデータ数(ワード)
Model3000 SN325
Model2000 L1PU12
4096
■FL-net のネットワーク変数の容量 ステーション ノード スキャンデータ数(ワード)
nv station FL911
Model3000 FL311 FL312
Model2000 FL611 FL612
8704
■Devicenet のネットワーク変数の容量 ステーション ノード スキャンデータ数(ワード)
Model3000 DN311A 756
Model2000 DN611A 256

1.3 nV シリーズ/V シリーズのソフトウェアモデル
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 111
■Profibus のネットワーク変数の容量 ステーション ノード スキャンデータ数(ワード)
PF311 256 Model3000
PF312 122
■Tc-net10 のネットワーク変数の容量 ステーション ノード スキャンデータ数(ワード)
Model3000 CN711 CN712 CN713
Model2000 CN611 CN612 CN613
16384
■Tc-net20 のネットワーク変数の容量 ステーション ノード スキャンデータ数(ワード)
Model2000 CN623 CN624
16384
■Tc-net100 のネットワーク変数の容量 ステーション ノード スキャンデータ数(ワード)
nv station TN821 TN822
131072
Model3000 TN711 TN712 TN721 TN722

第 1 章 nV シリーズ/V シリーズの基礎知識
6E8C4890 112
1.3.22 コンフィグレーション
「コンフィグレーション」は、ステーションのメインユニットや I/O モジュールの
ハード構成情報です。
これらは、V-Tool の「プロダクトツリー」でハード構成やモジュールパラメータを
登録すると自動的に作成され、コントローラへの「一括ダウンロード」でロードされま
す。内容としては、次のものがあります。
■nv シリーズのコンフィグレーションの内容
項目 内容
ステーション構成情報 メインユニット構成等の情報
コントローラパラメータ 停電時の動作やタスクの制御周期などの設定情報
I/O コネクション情報 TC-net I/O 等の I/O 信号を一括入出力するための接続情報
I/O ループ情報 I/O ループの構成情報
I/O ノード情報 I/O ノードおよび、I/O モジュールの構成情報
特殊 TC-net I/O 情報 FL-net、MODBUS 等の構成情報
G3/G2 I/O 情報 G3I/O、G2I/O のモジュール構成情報
■V シリーズのコンフィグレーションの内容
項目 内容
ステーション構成情報 メインユニット構成等の情報
コントローラパラメータ 停電時の動作やタスクの制御周期などの設定情報
PI/O モジュール構成情報 G3I/O、G2I/O のモジュール構成情報
I/O コネクション情報 G3I/O、G2I/O 等の I/O 信号を一括入出力するための接続情報
S20 モジュールパラメータ S20 モジュールの設定パラメータ
SI/O モジュール構成情報 シリアル I/O のモジュール構成情報
SI/O モジュールパラメータ シリアル I/O のモジュールパラメータ
SIF 共有マップ シリアル I/O の管理モジュール SIF と L3 コントローラの管理情報
○補足
・ コンフィグレーションはユーザのタスクでアクセスすることはなく、変数としては公開されま
せん。

113
第 2 章 ハードウェアの登録 ここでは、nv シリーズおよび、V シリーズのハードウェアモデルについて理解されている
方を対象に、ハードウェアの登録方法について説明します。
この「ハードウェアの登録」は、エンジニアリングの最初に行う作業です。
また、すみやかな登録を行うために、登録するハードウェアモデルについて、あらかじめ
概要を決めておくことをお勧めします。
ハードウェアの登録の流れを次の順で説明します。
2.1 システムを登録する ···································································· 114
2.2 ステーション構成を登録する······················································ 115
2.3 ネットワーク構成を登録する······················································ 119
2.4 モジュールパラメータを登録する ··············································121
2.5 モジュールパラメータの意味······················································130
2.5.1 nV シリーズのモジュールパラメータの意味 ················130
2.5.2 V シリーズのモジュールパラメータの意味 ··················133
2.6 I/O コネクションの領域を変更する··········································139
2.7 I/O モジュールを移動する ························································142
2.8 I/O モジュールの機種を変更する ·············································145
2.9 I/O ループ接続情報を登録する ·················································147

第 2 章 ハードウェアの登録
6E8C4890 114
2.1 システムを登録する
システムを登録するにはプロダクトツリーを起動します。
画面左上の「システム」フォルダをマウスで選択後、<ファイル>メニューの<新規
作成>を選択します。
(マウスの右ボタンを押して、ポップアップメニューの<新規作成>でも同じです)
入力ダイアログが表示されますので、任意のシステム名を入力してください。
●注記
・ 文字数は、Shift JIS 換算で 1byte 以上 64byte 未満
・ 使用不可能文字は # ' | \ @ [ ] : * . / < > ? "
登録が完了すると、画面右上に登録したシステムフォルダが表示されます。

2.2 ステーション構成を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 115
2.2 ステーション構成を登録する
ステーション以下のハードウェア構成を登録します。
プロダクトツリーを起動し、画面右上で編集するシステムをダブルクリックします。
画面左下に選択したシステム以下の編集可能なサブフォルダが表示されます。
■ステーションを登録する
サブフォルダの「ステーション」を選択し、<ファイル>メニューの<新規作成>を選択
します。
登録ダイアログが表示されますので、モデルを選択し名前を入力してください。
■メインユニットを登録する
ステーションのすぐ下にある「ユニット」を選択し、<ファイル>メニューの<新規作成
>を選択します。
登録ダイアログが表示されますので、メインユニットを選択してください。
コントローラを二重化構成にする場合は、ここで二重化の種別を選択します。
■メインモジュールを登録する
メインユニットのすぐ下にある「モジュール」を選択し、<ファイル>メニューの<新規
作成>を選択します。
登録ダイアログが表示されますので、スロット No.とメインモジュールを選択してく
ださい。
コントローラであればコメントを半角で 64 文字まで登録することができます。
■I/O ノードまたは、バスを登録する
nv シリーズの場合、メインモジュールのすぐ下にある「I/O ノード」を選択し、<フ
ァイル>メニューの<新規作成>を選択します。
登録ダイアログが表示されますので、ノード No.と I/O ノードを選択してください。
type1 コントローラの場合、ノード間の接続情報を登録することで、ループの接続状
態をシステムビューで確認することができます。
登録方法については、「2.9 I/O ループ接続情報を登録する」を参照してください。
V シリーズの場合、メインモジュールのすぐ下にある「バス」を選択し、<ファイル>メ
ニューの<新規作成>を選択します。
登録ダイアログが表示されますので、バス No.とバスを選択してください。
バスは、メインモジュールと I/O ユニットを接続するためのケーブルですが、接続を
管理するためここで登録します。
model 1000 の場合、既定のバス「I/O バス」を登録してください。
model 3000 の SIF モジュールにバスを登録する場合は、モジュールパラメータで管
理コントローラを登録してください。

第 2 章 ハードウェアの登録
6E8C4890 116
■I/O ユニットを登録する
バスのすぐ下にある「ユニット」を選択し、<ファイル>メニューの<新規作成>を選択
します。
登録ダイアログが表示されますので、I/O ユニット No.と I/O ユニットを選択して
ください。
model 1000 の場合、対応する I/O ユニットは有りませんが、接続を管理するため、
既定の I/O ユニット「I/O ユニット」を登録してください。
model 2000 でパラレルバスを使用する場合、ここで、バスの種別を選択してから I/O
ユニットを登録してください。
コメントを半角で 64 文字まで登録することができます。
■I/O モジュールを登録する
I/O ユニットのすぐ下にある「モジュール」を選択し、<ファイル>メニューの<新規作
成>を選択します。
登録ダイアログが表示されますので、I/O モジュール No.とモジュールを選択してく
ださい。

2.2 ステーション構成を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 117
■機種の名前を変更する
これは機種の変更やコントローラ、I/O ユニットのコメントを変更することができま
す。
プロダクトツリーの左下で、ユニットまたはモジュールを選択し、<ファイル>メニュー
の<名前の変更>を選択します。
変更ダイアログが表示されます。
名前を変更する場合は、変更する名前を選択してください。
コメントを変更する場合は、変更コメントを入力してください。
・機種の交換可能なユニット
1 BU816 BU816Double
2 BU825 BU825Single
3 BU742 BU742Double
4 BU744 BU744Double
5 BU746 BU746Double
6 BU748 BU748Double
7 BU648E BU648Edouble
8 BU643D BU643Ddouble

第 2 章 ハードウェアの登録
6E8C4890 118
・機種の交換可能なモジュール 1 S3PU55
S3PU65
2 S2PU72
S2PU72D
3 S2PU72_X
S2PU72D_X
・RIO ステーション用メインユニット BU74A で機種の交換可能なモジュール 変更前のモジュール 変更後のモジュール
1 S3PU55 S3PU55+IF721 S3PU55+IF741
2 S3PU55+IF721 3 S3PU55+IF741
S3PU55
4 S3PU45 S3PU45+IF721 S3PU45+IF741
5 S3PU45+IF721 6 S3PU45+IF741
S3PU45
7 S3ST45A S3ST45A+IF721 8 S3ST45A+IF721 S3ST45A
■other station を非表示にする
‘other station’を非表示にすることができます。
‘other station’が表示されている状態で、<表示>メニューの<other station を
表示する>を選択し、このメニューのチェックマークを消去します。または、プロダ
クトツリーの左下でサブフォルダの「ステーション」を選択し、マウスの右ボタンク
リックで表示されたポップアップメニューの<other station を表示する>を選択し
ます。
‘other station’が非表示になると、「ステーション」の右側に「other station 非表
示」と表示されます。
‘other station’を表示する場合は、再度、<表示>メニューの<other station を表
示する>を選択します。または、プロダクトツリーの左下でサブフォルダの「ステー
ション」を選択し、マウスの右ボタンクリックで表示されたポップアップメニューの
<other station を表示する>を選択します。

2.3 ネットワーク構成を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 119
2.3 ネットワーク構成を登録する
ここでは、ステーションとステーションをつなぐ「LAN」の構成を登録します。LAN
を経由してデータの伝送を行う場合は、必ず本項目を設定してください。LAN を使用
しない場合は、LAN構成を登録せず、先へ進んでください。
■LAN 構成
複数のステーションは、LAN を経由することにより、プロセスデータなどの情報を共
有することができます。
次の図は、1本の LAN に3台のステーションとエンジニアリングツールを接続したシ
ステムの例です。
ステーション
ステーション
ステーション
エンジニアリングツール LAN
システムへの LAN の導入は、次の手順でおこないます。
・各ステーションのハードウェア構成にネットワークモジュールを追加する
・システムに LAN を追加する
・LAN に各ステーションのネットワークモジュールを接続する
■各ステーションのハードウェア構成に LAN カードを追加する
使用する LAN の種別に適合したネットワークモジュールを登録します。
登録は「2.2 ステーション構成を登録する」を参照してください。
■システムに LAN を追加する
プロダクトツリーの左下で「ネットワーク」フォルダを選択し、<ファイル>メニューの
<新規作成>を選択します。
ネットワーク No と LAN 種別を選択します。必要であればコメントを半角で 64 文字
まで登録することが出来ます。

第 2 章 ハードウェアの登録
6E8C4890 120
■LAN に各ステーションのネットワークモジュールを接続する
これまでの手順で、[ネットワークモジュール]と[LAN]を追加することができまし
た。この状態では、[ネットワークモジュール]と[LAN]が独立して存在しているた
め伝送を行うことができません。
ここでは、ソフトウェア上で[LAN]に[ネットワークモジュール]を接続する手順
を説明します。
プロダクトツリーの左下で「モジュール」フォルダを選択し、<ファイル>メニューの<
新規作成>を選択します。
ノード No とモジュール名を選択します。
■ネットワークのコメントを変更する
プロダクトツリーの左下で、ネットワークを選択し、<ファイル>メニューの<名前の変
更>を選択します。
変更ダイアログが表示されますので、変更するコメントを入力してください。

2.4 モジュールパラメータを登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 121
2.4 モジュールパラメータを登録する
ここでは、ステーション構成で登録した、メインモジュールや I/O モジュールが持
っているパラメータを登録する方法を説明します。
■モジュールパラメータ画面の表示
プロダクツリーの左下で、メインモジュールか I/O モジュールを選択し、<ファイル
>メニューの<モジュールパラメータ>を選択します。
ネットワークモジュールの場合は、右下でネットワークモジュールを選択し、<ファ
イル>メニューの<モジュールパラメータ>を選択しても表示できます。

第 2 章 ハードウェアの登録
6E8C4890 122
■モジュールパラメータ画面の意味
以下に画面の機能を説明します。
<モジュール名>
ユニットに接続されたモジュールを切り換えられます。
スロット No.とモジュール名のリストから表示したいモジュールを選択してください。
<表示>
表示対象を切り換えられます。
ツール:オフラインの情報を表示します。
モジュール:オンラインの情報を表示します。
ツールとモジュール:オフラインとオンラインの情報を並べて表示します。
★コントローラや伝送モジュールのとき表示されます。
<伝送>
伝送相手を切り換えられます。
プライマリ、セカンダリが選択できます。
★伝送モジュールのとき表示されます。
<タブ>
表示分類別にタブでパラメータを分けています。
★コントローラ,I/O モジュール,伝送モジュールで表示できるタブが違います。
<更新>ボタン
表示データを再読み込みします。
<書き込み>ボタン
モジュール表示の時、変更内容をモジュールに書き込みます。
<ダウンロード>ボタン
ツールの内容を一括でモジュールに書き込みます。
★伝送モジュールのとき有効になります。
<印刷>ボタン
表示内容をそのまま印刷します。
<閉じる>ボタン
モジュールパラメータ画面を閉じます。
<ヘルプ>ボタン
オンラインマニュアルを表示します。
<ベリファイ>ボタン
MELPLAC I/O のパラメータ登録やブロック転送に関する登録のチェックを行ない
ます。
★R3PU45+IF72C や MELPLAC I/O モジュールのとき表示されます。
<全てベリファイ>ボタン
全てのモジュールパラメータの整合性チェックを行ないます。
★FMGW1 のとき表示されます。

2.4 モジュールパラメータを登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 123
<一括ダウンロード>ボタン
「全てベリファイ」を実行し、エラーがなければ、全てのモジュールパラメータを
ダウンロードします。
★FMGW1 のとき表示されます。
<ツールへ書き込み>ボタン
「ツールとモジュール」表示のとき、モジュールの値をツールの値に書き込みます。
★FMGW1 のとき表示されます。
<送信>
「送信ブロック」内に設定されている全てのブロックの「送信」欄を“する”また
は“しない”に変更します。
★Tc-net100 モジュール(TN7**、TN8**)のとき表示されます。
■値の変更
各項目にカーソルを移動し、値を入力または選択します。
※青文字のパラメータは変更できません。
値を入力するものは画面の下に範囲が表示されますのでその範囲内で入力してくださ
い。
ツールの値は、確定するとすぐに書き込まれますので保存作業がありません。
モジュールの値は、変更箇所が赤文字で表示され<書き込み>ボタンで変更箇所全て
が書き込まれます。
●重要
・ S3 コントローラ(OS:V02.5*以降)、またはユニファイドコントローラ type1 にて、
タスクスキャン周期をオンラインで変更する場合、以下の制約があります。
最大値 ≧ 設定値 > 変更前の設定値×0.8
シンクロトレンドのトレンドデータ収集中は変更できません。
該当タスクを実行していない場合は変更できません。

第 2 章 ハードウェアの登録
6E8C4890 124
■ベリファイ機能(MELPLAC I/O 接続の場合)
MELPLAC I/O のパラメータ登録やブロック転送に関する登録のチェックを行なう
ことができます。
1) ベリファイの起動
MELPLAC I/O モジュールのモジュールパラメータ画面を表示します。

2.4 モジュールパラメータを登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 125
ボタン[ベリファイ]をクリックするとベリファイ機能が起動されます。
このほかに、次の画面からもベリファイ機能を起動することができます。
・[R3PU45+IF72C]のモジュールパラメータ画面の[ブロック転送]
・一括ダウンロード (自動的に起動されます)
2) ベリファイの中断
ボタン[キャンセル]をクリックするとベリファイ機能を中断することができます。
3) ベリファイ結果の印刷
ベリファイの完了後にボタン[印刷]をクリックするとベリファイの結果を印刷す
ることができます。

第 2 章 ハードウェアの登録
6E8C4890 126
4) エラーメッセージと対処方法
ベリファイでエラーが発見された場合の対処方法は以下のとおりです。
No. メッセージ内容 説明と対処法
101 IOW - 'Parameter not defined' 値が設定されていない項目が有ります。モジュールパラメータ画面で値を設定してください。なお、使用しない IOW の領域は、占有サイズを 0とし、先頭アドレスに該当モジュール内の最小アドレスを設定してください。
102 IOW - 'Out of Range' モジュールが占有する領域の末尾が 64KW を越えました。モジュールパラメータ画面で先頭アドレスや占有サイズを修正してください。
103 IOW - 'Area Override' モジュールが占有する領域が他の領域と重なっています。モジュールパラメータ画面で先頭アドレスや占有サイズを修正してください。
104 IOW - 'Area run over' 1つのモジュールが占有するアドレス空間が 16KW を越えました。1つのモジュールが複数の領域を利用する場合、全ての領域を連続する 16KW以内に配置してください。
106 IOW - 'I/O Direction' [入出力指定]が一致しません。 I/O 変数の登録を見直してください。
107 IOW - 'PIO Area Out of Range' I/O 変数が IOW の領域を越えています。
108 IOW - ' Invalid IOW' I/O 変数が無効な IOW に登録されています。
109 IOW - 'PIO Area Size Over' モジュールの占有サイズの合計が範囲を超えています。
201 VAR - 'Not Defined' I/O 変数がネットワーク変数として割り付けられていません。I/O変数を登録し、I/O 変数をネットワーク変数として割り付けてください。
301 BLK - 'TN7** Module Not Registered'
ステーションに TN7*モジュールを登録してください。
302 BLK - 'TN7** Module Not Connected'
TN7*モジュールを TC-net100LAN に接続してください。
303 BLK - 'Block Transfer Parameter not defined'
ブロック転送で、パラメータが全て登録されていないブロックが有ります。
304 BLK - 'I/O Module Parameter not defined'
ブロック転送の[対象 I/O モジュール]で指定したモジュールのパラメータを登録してください。
305 BLK - 'PIO Area Out of Range' ブロック転送の[PIO アドレス]がモジュールパラメータで指定したエリアの範囲外です。
306 BLK - 'Scan Area Out of Range' ブロック転送の[スキャンデータ・ブロック No]が TC-net のスキャンブロックの範囲外です。
307 BLK - 'Scan Area Override' ブロック転送で指定したスキャンブロックのエリアが重複しています。
308 BLK - 'TC-net 100 Talker not defined'
ブロック転送の[スキャンデータ・ブロック No]で指定した送信ブロックにノードと出力コントローラを登録してください。
309 BLK/IOW - 'Area Override' ブロック転送の[スキャンデータ・ブロック No]で指定した送信ブロックに I/O変数が登録されています。
310 BLK - 'I/O Direction' ブロック転送の[入出力指定]が入力の時、送信ブロックの出力コントローラは I/O を管理している R3 を指定してください。 ブロック転送の[入出力指定]が出力の時、送信ブロックの出力コントローラは I/O を管理している R3 以外のコントローラを指定してください。
311 BLK - 'Area Override' ブロック転送の[入出力指定]が出力指定の時、I/O 変数が一括出力として登録されています。
312 BLK/IOW - 'Size Over' 一括入出力変数の全ワード数とブロック転送の全ワード数の合計が 4096ワード以上です。 一括入出力する変数を減らすか、ブロック転送のワード数を減らしてください。
313 BLK - 'PIO Area Out of Range' ブロック転送の PIO エリア+サイズが IOW の領域(65536W)を越えています。
314 BLK - 'PIO Area Override' ブロック転送の[PIO アドレス]が重複しています。

2.4 モジュールパラメータを登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 127
■ベリファイ機能(FMGW1 の場合)
全てのモジュールパラメータの整合性チェックを行ないます。
1) ベリファイの起動
ボタン[全てベリファイ]をクリックすると、ベリファイ機能が起動されます。
ボタン[一括ダウンロード]をクリックしたときは、ベリファイ機能が自動的に起
動されます。
2) ベリファイの中断
ボタン[キャンセル]をクリックするとベリファイ機能を中断することができます。
3) ベリファイ結果の印刷
ベリファイの完了後にボタン[印刷]をクリックすると、ベリファイ結果を印刷す
ることができます。

第 2 章 ハードウェアの登録
6E8C4890 128
4) エラーメッセージと対処方法
ベリファイでエラーが発見された場合の対処方法は以下の通りです。
No. メッセージ内容 説明と対処法
0001 パラメータタブの TC ワード数が 1 なので TC コードの有効範囲は 0~HFFFF です。
[メッセージ転送トランザクション]の TC コードを 0~FFFF の値に変更してください。
0002 「タイプ 1」のサイズがメッセージ転送ブロック指定タブの要求エリアサイズを超えています。
[メッセージ転送トランザクション]のタイプ 1 のサイズを範囲内の値に変更してください。
0003 「タイプ 2」のサイズがメッセージ転送ブロック指定タブの要求エリアサイズを超えています。
[メッセージ転送トランザクション]のタイプ 2 のサイズを範囲内の値に変更してください。
0004 MDWS データサイズの設定が MDWS Cyclic アドレスの上限を超えています。
[Cyclic 転送ブロック]の MDWS データサイズを範囲内の値に変更してください。
0005 要求エリアスキャンオフセット・要求エリアサイズの設定が要求エリアスキャンブロック No.の上限を超えています。
[メッセージ転送ブロック]の要求エリアのオフセット・サイズを範囲内の値に変更してください。
0006 TC コードの設定が重複しています。 [メッセージ転送トランザクション]の TC コードを重複しない値に変更してください。
0007 応答エリアスキャンブロックの設定が重複しています。
スキャンブロック No.、オフセット、サイズを重複しない値に変更してください。
0008 スキャンブロックの設定が重複しています。 スキャンブロック No.、オフセット、サイズを重複しない値に変更してください。
0009 MDWS Cyclic アドレスの設定が重複しています。
MDWS アドレス、サイズを重複しない値に変更してください。
0010 転送方向が一致しません。 [メッセージ転送ブロック]と[メッセージ転送トランザクション]の転送方向を一致させてください。
0011 送信ブロックの登録が必要です。 スキャンブロック No.を[送信ブロック]に登録してください。
0012 応答エリアスキャンブロックに対する送信ブロックの登録が必要です。
スキャンブロック No.を[送信ブロック]に登録してください。
0013 送信ブロックの登録を削除してください。 スキャンブロック No.を[送信ブロック]から削除してください。
0014 応答エリアスキャンブロックに対する送信ブロックの登録を削除してください。
スキャンブロック No.を[送信ブロック]から削除してください。
0015 ステータス転送 T->M の設定が重複しています。スキャンヘルシー情報のアドレス、サイズを重複しない値に変更してください。
0016 要求エリアと応答エリアのスキャンブロックの設定が重複しています。
スキャンブロック No.、オフセット、サイズを重複しない値に変更してください。
0017 応答エリアと要求エリアのスキャンブロックの設定が重複しています。
スキャンブロック No.、オフセット、サイズを重複しない値に変更してください。

2.4 モジュールパラメータを登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 129
■ユニファイドコントローラの FL911 経由で V シリーズの FL654 へ接続する
FL911 経由で FL654 へのオペレーションを行うことができます。
適用条件は以下のとおりです。
1) エンジニアリングツール:V4.5.1[2]以上
2) PU811/PU866 のファームウェア:V01.35 以上
3) FL911 のファームウェア:V01.21 以上
詳細は、「FL-net(FL911)モジュール取扱説明書(6E8C5177)第6版 付録 E FL911
FL654 システムビュー画面取扱説明書」を参照してください。

第 2 章 ハードウェアの登録
6E8C4890 130
2.5 モジュールパラメータの意味
ステーション構成で登録したハードウェアモジュールは、パラメータ(モジュール
パラメータ)を持つもの・持たないものが有ります。
モジュールパラメータは、各モジュールの取扱説明書を参照し、意味を良く理解し
てから設定してください。
ここでは、各モジュールパラメータの意味について簡単に説明します。
2.5.1 nv シリーズのモジュールパラメータの意味
■メインモジュール
PU811,PU866,PU821,PU871
パラメータ名 意味・設定内容
プログラム縮退 ユーザプログラムでエラーが起きた時の動作を指定します あり:エラー発生プログラムを切り離して継続実行(縮退)する なし:エラーダウンする
I/O 縮退 一括/直接 I/O 入出力でエラーが起きた時の動作を指定します あり:エラー発生 I/O モジュールの入出力をやめ、継続実行(縮退)する なし:エラーダウンする
グローバル変数の初期化 ユーザ定義のグローバル変数を初期化するか否かを設定します
ローカル変数の初期化 ユーザ定義のローカル変数を初期化するか否かを設定します 但し、システムが割り付けたローカル変数は初期化します
プログラムによる時刻設定のログ出力
ユーザプログラムからの時刻変更をイベントログに登録するか否かを設定します
I/O 異常を CPU 状態に含める
システムビューにおいてコントローラのアラーム表示に I/O モジュールやI/O ループのアラームを含めるか否かを設定します
DC 瞬停時間(s) 電源ユニットの DC 電源が落ちた時に瞬停とする時間を設定します 瞬停検出しない時は0を設定します
優先順* タスク種別 優先順 1~4 のタスク種別を設定します
優先順* 実行設定 優先順 1~4 のタスクの実行を設定します 使用しない場合は、停止を指定します
優先順* スキャン周期 優先順 2~4 のスキャンタスクの実行周期を設定します
RIO 中速 I/O 分割数 RIO タスクの場合、中速 I/O スキャンデータが高速スキャン周期でいくつに分割されているかを登録します
二重化運転時のシステムアラーム セカンダリ側がオンライン運転時、通常(軽故障)にするのか、特殊(正常)にするのかを指定します
ユーザグローバル変数のトラッキング領域指定(MS 同期)
ユーザグローバル変数をトラッキングするか否かを設定します 全領域:グローバルの全領域トラッキング(リソースレポートでのグローバル設定値) 1~4:トラッキングするブロック数 1:ブロック1をトラッキングする 2:ブロック1,2をトラッキングする 3:ブロック1,2,3をトラッキングする 4:ブロック1,2,3,4をトラッキングする しない:トラッキングを行わない
トラッキングされるユーザ変数の先頭
トラッキングするユーザグローバル変数の先頭ワード No.を指定します
トラッキングされるユーザ変数のサイズ
トラッキングするユーザグローバル変数のワードサイズを指定します

2.5 モジュールパラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 131
パラメータ名 意味・設定内容
トラッキングされる D レジスタの先頭
トラッキングする D レジスタの先頭ワード No.を指定します
トラッキングされる D レジスタのサイズ
トラッキングする D レジスタのワードサイズを指定します
コンピュータリンク* Ethernet. スロット No.
Ethernet 経由でコンピュータリンクプロトコルにて MMI 装置等と接続する場合に Ethernet の実装スロットを指定します。
コンピュータリンク* UDP ポートNo.
コンピュータリンク用の UDP Port No.を指定します
GMT と現地時刻の差 グリニッジ標準時刻と現地時刻(ローカル時刻)の差を登録します。 数値入力(-13~13、0 は 9 と同じ扱い)。日本では設定不要(0 のまま)。
補正単位系 タグの温度・圧力補正において使用する単位系を登録します
OIS タグ書込み時のスキャン同期処理
OIS-DS からのタグデータ変更を、タスクのスキャン実行処理に同期させて行うかを登録します
M モード時の DO リードバック処理
モード付きのディジタルタグ(押ボタンタグ)で、制御モードが M のときに出力のリードバック処理をコントローラの標準機能(リニアライズ機能)で行うかを登録します
コントローラ番号 システム内でコントローラに付けるユニークな番号を指定します
DS スキャン指定 リアルタイムトレンドを行なうか指定します
コントローラ間伝送指定 任意のデータを同報通知するか指定します
G3 I/O CH* ノード No. IA931 を接続するノード No.を指定します。(type1 のみ指定可能、PU821 は固定)
G3 I/O CH* I/O ループスキャン速度
送信データのスキャン速度を指定します。
■Ethernet
EN8**,FN8**
パラメータ名 意味・設定内容
IP アドレスタイプ アドレスタイプを選択します。 ClassB 型:172.16.64.XX,サブネットマスク:255.255.192.0 ClassC 型:192.168.0.XX,サブネットマスク:255.255.255.0 任意:ツールから任意の値を設定できます
IP アドレスプライマリ シングルステーション構成、またはステーション2重化時にプライマリ側となるネットワークカードの IP アドレスを設定します
サブネットマスクプライマリ シングルステーション構成、またはステーション2重化時にプライマリ側となるネットワークカードのサブネットマスク値を設定します
IP アドレスセカンダリ ステーション2重化時にセカンダリ側となるネットワークカードカードの IP アドレスを設定します
サブネットマスクセカンダリ ステーション2重化時にセカンダリ側となるネットワークカードのサブネットマスク値を設定します
マルチキャスト登録数 マルチキャストグループを設定する時に、[マルチキャスト IP アドレス1]から連続して使用する個数を指定します
マルチキャスト IP アドレス マルチキャストグループの IP アドレスを[225.224.0.1]から[225.224.0.15]の間で、互いに重複しない値を設定します
オプションスイッチ 0 ON:フリーモード設定時に、伝送路診断機能を動作させます。 EN8**のみ有効
オプションスイッチ 1 ON:IGMP 機能を使用します。 EN8**のみ有効
フリーモードでのデフォルトゲートウェイIP アドレス
デフォルトゲートウェイ(ルータ)のIPアドレスを指定します

第 2 章 ハードウェアの登録
6E8C4890 132
■TC-net
TN8**
パラメータ名 意味・設定内容
IP アドレスタイプ アドレスタイプを選択します。 Vseries 標準 1:172.16.64.XX,サブネットマスク:255.255.192.0 Vseries 標準 2:172.31.64.XX,サブネットマスク:255.255.192.0 任意:ツールから任意の値を設定できます。
IP アドレスプライマリ シングルステーション構成、またはステーション2重化時にプライマリ側となるネットワークカードの IP アドレスを設定します
サブネットマスクプライマリ シングルステーション構成、またはステーション2重化時にプライマリ側となるネットワークカードのサブネットマスク値を設定します
IP アドレスセカンダリ ステーション2重化時にセカンダリ側となるネットワークカードカードの IP アドレスを設定します
サブネットマスクセカンダリ ステーション2重化時にセカンダリ側となるネットワークカードのサブネットマスク値を設定します
マルチキャスト登録数 マルチキャストグループを設定する時に、[マルチキャスト IP アドレス 1]から連続して使用する個数を指定します
マルチキャスト IP アドレス マルチキャストグループの IP アドレスを[225.224.0.1]から[225.224.0.15]の間で、互いに重複しない値を設定します
スキャン伝送 スキャン伝送の動作を設定します(受信の停止は設定できません) 停止:送信を停止します 起動:送信を行ないます
スキャン周期高速(0.1ms) 高速送信ブロックのスキャン周期を設定します
スキャン周期中速(ms) 中速送信ブロックのスキャン周期を設定します
スキャン周期低速(ms) 低速送信ブロックのスキャン周期を設定します
全コントローラダウンでスキャン停止する
ホスト機器(コントローラ)がダウンした時のスキャン動作を設定します No:停止しない Yes:停止する
受信系選択 伝送路が2重化されている場合、どの伝送路を使用するかを設定します
最大ノード間距離(km) 最も離れているノード間の距離を設定します。但し、デフォルト値の 8Km よりも短い場合には、そのまま、8Km と登録します。
最大リピータ段数(段) 最もリピータの段数の多い経路の値を設定します。但し、デフォルト値の 3 段よりも小さい場合には、そのまま、3 段と登録します。
オプションスイッチ 0 ON:スタンドアロンモード TN*1 台でスキャンをします。
オプションスイッチ 1 ON:セルフヘルシーモード 自局送信ブロックを必ずヘルシーにします。

2.5 モジュールパラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 133
2.5.2 V シリーズのモジュールパラメータの意味
■メインモジュール
S3,S2,R3,L3,L2,L1(LC),FN7,FN6
協調制御 複数コントローラ動作の時、協調制御を行なうか指定します。 このパラメータを変更した場合は、必ず同一ステーション内の全てのコントローラへ一括ダウンロードを行ってください。 単独コントローラ動作の時は「しない」に設定してください。 する:協調動作 しない:単独動作
縮退動作 複数 CPU 動作の時に本コントローラがエラーとなった場合、本コントローラを縮退するかを指定します。 単独コントローラ動作の時は「しない」に設定してください。 する:他のコントローラは RUN 実行を継続 しない:他のコントローラは[R-HOLD]に遷移
プログラム縮退 ユーザプログラムでエラーが起きた時の動作を指定します あり:エラー発生プログラムを切り離して継続実行(縮退)する。 なし:エラーダウンする
I/O 縮退 一括/直接 I/O 入出力でエラーが起きた時の動作を指定します あり:エラー発生 I/O モジュールの入出力をやめ、継続実行(縮退)する。なし:エラーダウンする
データ初期化 ユーザデータ初期化(システム初期化時および RUN 時に実行)でユーザデータの初期化を行うかを指定します。 あり:初期化する なし:初期化しない
システムバスへの I/O 反映 一括/直接 I/O 入出力で得られた I/O 変数の状態をシステムバスへ反映させるかを指定します。 複数コントローラで I/O 入出力を使用する場合は、[あり]に設定してください。 あり:反映する なし:反映しない
直接 I/O 異常時の特殊処理
直接入出力で異常が発生した時に、その異常を無視するかを指定します。あり:異常を無視する(エラーログへの記録は残る) なし:異常処理を実行する
I/O モジュール異常検出 I/O モジュールの異常(内蔵ヒューズ溶断等の I/O アクセス異常とならないモジュール異常)を検出するかを指定します。 あり:検出する なし:検出しない
AC 瞬停時間(ms) 電源ユニットの AC 電源が落ちた時に瞬停とする時間を設定します。 瞬停検出しない時は0を設定します
AC 瞬停動作選択 AC 瞬停を検出した時の動作を選択します。 ●エラーダウン/継続運転
DC 瞬停時間(s) 電源ユニットの DC 電源が落ちた時に瞬停とする時間を設定します。 瞬停検出しない時は0を設定します
SS タスク実行設定 超高速スキャンタスクの実行を設定します。 使用しない場合は、停止を指定します
HS タスク実行設定 高速タスクの実行を設定します。 使用しない場合は、停止を指定します。
MS タスク実行設定 メインスキャンタスの実行を設定します。 使用しない場合は、停止を指定します。
SS タスクスキャン周期(ms) 超高速スキャンタスクの実行周期を設定します。
HS タスクスキャン周期(ms) 高速タスクの実行周期を設定します。

第 2 章 ハードウェアの登録
6E8C4890 134
MS タスクスキャン周期(ms) メインスキャンタスクの実行周期を設定します。 フローティングスキャンの場合は0を設定します(S コントローラのとき)。
BG タスク実行モード バックグランドタスク実行モード 1回実行:起動要求時に一回実行されるモード サイクリック実行:起動要求がある間、サイクリック回数で設定したスキャン回数毎に1回実行するモード
BG タスク周期(ms) メインスキャンがフローティングスキャンの場合、バックグランドタスクの実行周期を設定します。 メインスキャンが定刻スキャンの場合は0(フローティングスキャン)を設定します。
BG タスクサイクリック回数 設定された回数毎に1回、バックグランドタスクが実行されます
伝送タスク待ち時間(ms) シーケンス制御処理とデータ伝送処理のチューニングをおこなうパラメータです。システムに精通していない方はデフォルト設定(0)で使用してください。
RS485 ステーション No RS485 のケーブルに接続されたステーションを識別するための IDNo を指定します
RS485 伝送速度(bit/s)
RS485 の伝送速度を選択します。
RS485 パリティ指定 RS485 のデータ1単位に付けるパリティビットを指定します。
RS485 データ長 RS485 のデータ1単位で伝送するデータ長を指定します。
RS485 ストップビット RS485 のデータ1単位に付けるストップビット長を指定します。
I/O レス試験 実際の I/O モジュールを使用しないで I/O 入出力を行なうか否かを設定します。
試験対象外カード BusNo I/O レス試験から除外する TOSLINE-S20 のバス No を指定します。
試験対象外カード UnitNo I/O レス試験から除外する TOSLINE-S20 のユニット No を指定します。
試験対象外カード SlotNo I/O レス試験から除外する TOSLINE-S20 のスロット No を指定します。
プログラムによる時刻設定のログ出力
ユーザプログラムからの時刻変更をイベントログに登録するか否かを設定します。
コンピュータリンク Ether. SlotNo
Ethernet 経由でコンピュータリンクプロトコルにて MMI 装置等と接続する場合に Ethernet の実装スロットを指定します。
コンピュータリンク UDP PortNo
コンピュータリンク用の UDP Port No.を指定します。
SS タスクのトラッキング 超高速スキャンタスクをトラッキングするか否かを設定します。
HS タスクのトラッキング 高速スキャンタスクをトラッキングするか否かを設定します。
MS タスクのトラッキング メインスキャンタスクをトラッキングするか否かを設定します。
BG タスクのトラッキング バックグラウンドタスクをトラッキングするか否かを設定します。
SW レジスタのトラッキング SW レジスタをトラッキングするか否かを設定します。
DW レジスタのトラッキング DW レジスタをトラッキングするか否かを設定します。
トラッキングされる DW の先頭 No
DW レジスタをトラッキングする場合の DW 先頭レジスタ No.を指定します。
トラッキングされる DW の最終 No
DW レジスタをトラッキングする場合の DW 最終レジスタ No.を指定します。
ユーザグローバル変数のトラッキング
ユーザグローバル変数をトラッキングするか否かを設定します。
ユーザグローバル変数のトラッキング領域指定数
ユーザグローバル変数をトラッキングするか否かを設定します。 全領域:グローバルの全領域トラッキング(リソースレポートでのグローバル設定値) 1~4:トラッキングするブロック数 1:ブロック1をトラッキングする 2:ブロック1,2をトラッキングする 3:ブロック1,2,3をトラッキングする 4:ブロック1,2,3,4をトラッキングする
トラッキングされるユーザグローバル変数の先頭
トラッキングするユーザグローバル変数の先頭ワード No.を指定します。

2.5 モジュールパラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 135
トラッキングされるユーザグローバル変数のサイズ
トラッキングするユーザグローバル変数のワードサイズを指定します。
ステーショングローバル変数のトラッキング
ステーショングローバル変数をトラッキングするか否かを設定します。
IQ レジスタのトラッキング I/Q レジスタをトラッキングするか否かを設定します。
補正単位系 タグの温度・圧力補正において使用する単位系を登録します。
GMT と現地時刻の差 グリニッジ標準時刻と現地時刻(ローカル時刻)の差を登録します。 数値入力(-13~13、0 は 9 と同じ扱い)。日本では設定不要(0 のまま)。
OIS タグ書込み時のスキャン同期処理
OIS-DS からのタグデータ変更を、タスクのスキャン実行処理に同期させて行うかを登録します。
M モード時の DO リードバック処理
モード付きのディジタルタグ(押ボタンタグ)で、制御モードが M のときに出力のリードバック処理をコントローラの標準機能(リニアライズ機能)で行うかを登録します。
高速 I/O 更新周期(ms) 高速 I/O スキャンの周期を設定します。
中速 I/O 分割数 中速 I/O スキャンデータが高速スキャン周期でいくつに分割されているかを登録します。
縮退 I/O カード Bus*-Unit* (16 進)
I/O 異常検出時の I/O 縮退動作をカード単位に指定します。(16 進) 入力はビットで指定します。 0:エラーダウン 1:I/O 縮退
I/O の初期化バイパスBus*-Unit* (16 進)
初期化処理をバイパスするか否かをカード単位に指定します。(16 進)入力はビットで指定します。 0:しない 1:する
K5AF 処理監視タイマ値 (10ms 単位)
K5AF の初期化タイムアウト、および K5AF のローカルエラーフラグ読み出しタイムアウトの値を設定します。 0 を設定した場合: K5AF の初期化タイムアウトは 5000ms、K5AF のローカルエラーフラグ読み出しタイムアウトは 50ms としてコントローラは動作します。(これらは、R3 コントローラの固有値と同じです。) 0 以外の値を設定した場合: 設定値が、K5AF の初期化タイムアウト、および K5AF のローカルエラーフラグ読み出しタイムアウトの値として有効となります。
ローカル変数の初期化 ユーザ定義のローカル変数を初期化するか否かを設定します。 但し、システムが割り付けたローカル変数は初期化します。
コントローラ番号 システム内でコントローラに付けるユニークな番号を指定します。
DS スキャン指定 リアルタイムトレンドを行なうか指定します。
コントローラ間伝送指定 任意のデータを同報通知するか指定します。
瞬時判定 DI モジュール No. (この項目は、現在使われておりません)
瞬時判定 DI ポイント No. (この項目は、現在使われておりません)
LDU アラーム復帰方式 ループディスプレイのアラームを復帰させる方法を選択します(LC のみ) 。
I/O 入出力モード G3I/O の入出力処理を高速で行うか指定します。 組み合わせ条件:S3 V2.72~
対象 I/O モジュール ブロック転送を行なう MELPLAC I/O モジュールを選択します。
PIO アドレス ブロック転送を行なうプロセス I/O のエリアを入力します。
ワードサイズ ブロック転送を行なうワードサイズを入力します。
スキャンデータ・ブロック No. ブロック転送を行なう TC-net100 のスキャンブロックを入力します。
スキャンデータ・ワード No. ブロック転送を行なうスキャンブロック内のオフセットを入力します。
入出力指定 プロセス I/O のデータ入出力方向を選択します。
二重化運転時のシステムアラーム セカンダリ側がオンライン運転時、通常(軽故障)にするのか、特殊(正常)にするのかを指定します。なお、本機能は、S3PU65A(V02.79 以降)、S2PU82(V02.02 以降)が有効です。

第 2 章 ハードウェアの登録
6E8C4890 136
■Ethernet
EN7,EN6,EN5,FN7,FN6,ENGW-5654
IP アドレスタイプ アドレスタイプを選択します。 ClassB 型:172.16.64.XX,サブネットマスク:255.255.192.0 CIEMAC_1200 型:192.0.0.XX,サブネットマスク:255.255.255.192任意:ツールから任意の値を設定できます。 ●EN531 は CIEMAC_1200 型と任意のみ指定できます。
IP アドレスプライマリ シングルステーション構成、またはステーション2重化時にプライマリ側となるネットワークカードの IP アドレスを設定します。
サブネットマスクプライマリ シングルステーション構成、またはステーション2重化時にプライマリ側となるネットワークカードのサブネットマスク値を設定します。
IP アドレスセカンダリ ステーション2重化時にセカンダリ側となる Ethernet カードの IP アドレスを設定します。
サブネットマスクセカンダリ ステーション2重化時にセカンダリ側となる Ethernet カードのサブネットマスク値を設定します。
マルチキャスト登録数 マルチキャストグループを設定する時に、[マルチキャスト IP アドレス1]から連続して使用する個数を指定します。
マルチキャスト IP アドレス マルチキャストグループの IP アドレスを[225.224.0.1]から[225.224.0.15]の間で、互いに重複しない値を設定します。
オプションスイッチ 0 ON:フリーモード設定時に、伝送路診断機能を動作させます。
フリーモードでのデフォルトゲートウェイ IP アドレス
デフォルトゲートウェイ(ルータ)のIPアドレスを指定します。
■TC-net
TN7,TNH,TNGW-5652,FMGW1,CN7,CN6
IP アドレスタイプ アドレスタイプを選択します。 Vseries 標準 1:172.16.64.XX,サブネットマスク:255.255.192.0Vseries 標準 2:172.31.64.XX,サブネットマスク:255.255.192.0任意:ツールから任意の値を設定できます。 ●FMGW1 の場合 固定:192.168.0.XX,サブネットマスク:255.255.255.0 任意:ツールから任意の値を設定できます。
IP アドレスプライマリ シングルステーション構成、またはステーション2重化時にプライマリ側となるネットワークカードの IP アドレスを設定します。
サブネットマスクプライマリ シングルステーション構成、またはステーション2重化時にプライマリ側となるネットワークカードのサブネットマスク値を設定します。
IP アドレスセカンダリ ステーション2重化時にセカンダリ側となるネットワークカードカードの IP アドレスを設定します。
サブネットマスクセカンダリ ステーション2重化時にセカンダリ側となる Ethernet カードのサブネットマスク値を設定します。
マルチキャスト登録数 マルチキャストグループを設定する時に、[マルチキャスト IP アドレス 1]から連続して使用する個数を指定します。
マルチキャスト IP アドレス マルチキャストグループの IP アドレスを[225.224.0.1]から[225.224.0.15]の間で、互いに重複しない値を設定します。
スキャン伝送 スキャン伝送の動作を設定します(受信の停止は設定できません) 停止:送信を停止します。 起動:送信を行ないます。
スキャン周期高速(ms) スキャン周期高速(0.1ms)
高速送信ブロックのスキャン周期を設定します。
スキャン周期中速(倍) 中速送信ブロックのスキャン周期(スキャン周期高速の倍数)を設定します。
スキャン周期中速(ms) 中速送信ブロックのスキャン周期を設定します。

2.5 モジュールパラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 137
スキャン周期低速(ms) 低速送信ブロックのスキャン周期を設定します。
全コントローラダウンでスキャン停止する
ホスト機器(S/L/C コントローラ)がダウンした時のスキャン動作を設定します。 No:停止しない Yes:停止する
コントローラ*ダウンでスキャン停止しない
ホスト機器(S/L/C コントローラ)の Slot*がダウンした時のスキャン動作を設定します。 No:停止する Yes:停止しない
受信系選択 伝送路が2重化されている場合、どの伝送路を使用するかを設定します
リンクアドレス ネットワークを階層化した場合にどのネットワークを選択するかを設定します。 (将来用のパラメータです)
高速送信ブロック 1-先頭ワード No
高速送信ブロック領域の先頭ワード No.
高速送信ブロック 1-ワード数 高速送信ブロック領域のサイズ
中速送信ブロック 1-先頭ワード No
中速送信ブロック領域の先頭ワード No.
中速送信ブロック 1-ワード数 中速送信ブロック領域のサイズ
最大ノード間距離(km) 最も離れているノード間の距離を設定します。但し、デフォルト値の 8Kmよりも短い場合には、そのまま、8Km と登録します。
最大リピータ段数(段) 最もリピータの段数の多い経路の値を設定します。但し、デフォルト値の3 段よりも小さい場合には、そのまま、3 段と登録します。
オプションスイッチ 0 ON:スタンドアロンモード TN*1 台でスキャンをします。
オプションスイッチ 1 ON:セルフヘルシーモード 自局送信ブロックを必ずヘルシーにします。
■TOSLINE-S20
SN3,SN2,SN6,L1PU12
スキャン伝送 スキャン伝送の動作を設定します。 する:スキャン伝送を行ないます しない:スキャン伝送を停止します
スキャンアクセス スキャン伝送で送受信するデータの連続性について設定します。 1Word 単位:1Word 単位でデータの連続性を保証します 2Word 単位:1Word 単位でデータの連続性を保証します
メッセージ伝送 メッセージ伝送の動作を設定します。 する:メッセージ伝送を行ないます しない:メッセージ伝送を停止します
目標サイクル時間 メッセージ伝送の送信時間を制御するパラメータです。 (メッセージ伝送の送信許可時間)=(目標サイクル時間)-(前周期に送信権を獲得してから再度獲得するまでの時間)
スタンバイ立ち上げ する:立ち上げ時にスタンバイ状態(スキャン伝送を行わない)になります しない:立ち上げと同時にスキャン伝送を開始します
送信先頭アドレス 1 送信先頭アドレス 2
送信ブロック領域の先頭アドレスを指定します。
送信ワード数 1 送信ワード数 2
送信ブロック領域のサイズを指定します。

第 2 章 ハードウェアの登録
6E8C4890 138
■SIF
IF735
スロット n のコントローラによる管理 この SIF をスロットnのLコントローラ管理下に置くときに設定します。
■シリアル I/O モジュール ノイズカットフィルタ アナログ入力信号に混入してくるノイズをカットするための周波数を選択しま
す。
レンジ 入力信号の変換レンジを選択します。
入力 入力処理のあり・なしを選択します。
断線特性 センサへの信号線が断線した時の出力値を設定します。 ダウンスケール:0カウント相当
出力点数 アナログの出力点数を選択します。1ポイント目から指定された点数の出力をおこないます。I/O 更新時間は、出力点数が多くなるほど、長くなります。
異常時出力保持 モジュールが出力異常になった時の処理を選択します。 No:出力値を0カウント相当(0V または 0A)にリセットします Yes:出力値を保持します
CCDI 保持時間(100ms) 状態変化検出保持 (将来用のパラメータです)
信号種別 パルスの信号種別を選択します
瞬時値用単位時間 指定された時間当たりのパルスカウントを瞬時値とします。 単位は 10ms です
スレッショルド スレッショルド電圧を設定します。単位は V です。
パルス低速/高速 出力パルス信号のタイプを選択します。
パルス列/幅 出力パルス信号のタイプを選択します。
ホールド時間 パルスの方向が反転した時、パルスの出力を停止する時間を設定します。 単位は 100ms です。
バックラッシュ補償時間 パルスの方向が反転した時、パルスの出力を補正するために加算する値を設定します。単位は、出力信号のタイプで異なります。 パルス幅出力:100ms 単位 パルス列出力:1 カウント単位
AI:入力 入力処理のあり・なしを選択します。
AI:断線特性 センサへの信号線が断線した時の出力値を設定します。 ダウンスケール:0 カウント相当
AI:レンジ 入力信号の変換レンジです。 1-5V 固定です
DI:CCDI 保持時間(100ms) 状態変化検出保持 (将来用のパラメータです)
PO:パルス低速/高速 出力パルス信号のタイプを選択します。
パルスタイプ 出力パルス信号のタイプを選択します(「幅」のみ指定できます)。
ホールド時間(100ms) パルスの方向が反転した時、パルスの出力を停止する時間を設定します。 単位は 100ms です。

2.6 コネクションの領域を変更する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 139
2.6 I/O コネクションの領域を変更する
ここでは、変数を登録した時に自動割付される IQ レジスタの割り振りをコネクショ
ン種別毎に設定する方法について説明します。
●重要
・領域が重ならないように設定してください。
・各種別のカード総占有ワード数より%IQ レジスタ個数を小さくしないでください。
・設定値は偶数を入力してください。
・%IQ レジスタ個数は%IQ レジスタ使用個数と同じまたはそれ以上を入力してください。
[nv シリーズ]
■領域割り当ての表示
プロダクトツリーの左下で、ステーションを選択し、メニュー<ファイル><I/O コ
ネクション領域変更>を選択します。
・ 「I/O 種別」:I/O 種別毎にグループ化されている領域の情報を表示・設定する画
面です。
・ 「タスク種別」:タスク種別毎の割り振り個数を表示・設定する画面です。

第 2 章 ハードウェアの登録
6E8C4890 140
・ “%IQ レジスタ使用個数”は、既に使用しているレジスタの個数を示しています。
・ 数値の青文字表示は、変更不可であることを示しています。
■領域割り当ての変更
・%IQ レジスタ先頭 No,%IQ レジスタ個数の列にある該当のセルをクリックし、変
更したい数値を入力します。
・数値を変更後に赤文字表示は、変更候補であることを示します。
・[保存]ボタンを押します。変更内容が反映されます。
●重要
・ %IQ レジスタ先頭 No.を変更した場合、I/O 変数やステーション変数のアドレスが変わりますので
プログラムを再コンパイルする必要があります。その後、一括ダウンロードを実行してくださ
い。

2.6 コネクションの領域を変更する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 141
[V シリーズ]
■領域割り当ての表示
プロダクトツリーの左下で、ステーションを選択し、メニュー<ファイル><I/O コ
ネクション領域変更>を選択します。
選択したステーションのメインユニットが BU74A(RIO 用)の場合、コントローラ単
位で変更を行います。画面上で設定するコントローラを選択してください。
%IQ レジスタ使用個数とは既に使用しているレジスタの個数を示しています。
ステーション内に複数のコントローラが登録されている場合(メインユニットが
BU74A の時を除く)、TC-net10 型、ステーショングローバル型は、レジスタを一番多く使用し
ているコントローラの値が表示されます。
■領域割り当ての変更
変更する場合は、%IQ レジスタ先頭 No,%IQ レジスタ個数の列をクリックし、変更
する数値を入力してください。
変更後、文字が赤くなるので、<保存>を行ない変更内容を保存してください。
●重要
・ %IQ レジスタ先頭 No.を変更した場合、I/O 変数やステーション変数のアドレスが変わりますので
プログラムを再コンパイルする必要があります。その後、一括ダウンロードを実行してくださ
い。

第 2 章 ハードウェアの登録
6E8C4890 142
2.7 I/O モジュールを移動する
対象は nv シリーズの I/O モジュールです。
I/O モジュールの移動はエンジニアリングツール バージョン V4.6.0 以降で利用可
能です。
I/O モジュールを移動することができます。
プロダクトツリーを起動し、移動元の「I/O モジュール」を選択後、ポップアップ
メニューから<移動>を選択します。
[I/O モジュールの移動]画面が開きます。
■1 つの I/O モジュールの移動
1) 移動先のステーション、コントローラ、I/O ノード、スロット No.を選択後、[OK]ボタ
ンを選択します。
2) 確認ダイアログを表示するので[OK]ボタンを選択します。
3) RIO 指定の変数がある場合で、別のコントローラへ移動時には、未定義となった変
数の一覧をメモ帳で表示します。
4) 完了ダイログを表示するので[OK]ボタンを選択します。
5) [I/O モジュールの移動]画面が閉じ、[プロダクトツリー]画面が再表示されます。
6) 3)の場合は、未定義となった変数の一覧を元に[送信ブロック]画面で送信ブロックの設
定、[ネットワーク変数]画面で未定義変数の割付を行ってください。
■複数の I/O モジュールの移動
1) [I/O モジュールの移動]画面で[一括処理]ボタンを選択します。
2) バッチファイル選択ダイアログを表示します。
3) バッチファイルを選択します。
4) 確認ダイアログを表示するので[OK]ボタンを選択します。
6) 移動中ダイログを表示し、I/O モジュールの移動処理を行います。
7) [キャンセル] ボタンを選択すると移動処理を中止します。
移動要求前の元の状態に全て戻す。

2.7 I/O モジュールを移動する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 143
8) 移動不可が 1 つでもあった場合はエラーダイアログを表示し、処理を中止します。
移動要求前の元の状態に全て戻します。
[OK]ボタンを選択します。11)へ
9) 完了ダイログを表示するので[OK]ボタンを選択します。
10) RIO 指定の変数がある場合で、別のコントローラへ移動時には、未定義となった変
数の一覧をメモ帳で表示 します。
11 )[I/O モジュールの移動]画面が閉じ、[プロダクトツリー]画面が再表示されます。
12) 10)の場合は、未定義となった変数の一覧を元に[送信ブロック]画面で送信ブロックの
設定、[ネットワーク変数]画面で未定義変数の割付を行ってください。
■未定義となった変数の一覧
モジュール:ハードアドレスとモジュール名。(ハードアドレスはメインスロット No.-
ノード No.-ユニット No.-スロット No.)
■バッチファイル
ファイルの拡張子は”.txt”とし、中身は”csv”形式とします。
書式は、“移動元のステーション名”,”移動元のハードアドレス”,”移動先のステーション
名”,”移動先のハードアドレス”です。
ハードアドレス:メインスロット No.-ノード No.-ユニット No.-スロット No.
書式例
“03_MF01-Stn1”,”00-004-01-09”,”04_MF01-Stn2”,”00-003-01-01”

第 2 章 ハードウェアの登録
6E8C4890 144
■移動できる構成
直結 I/O 構成での出力、入力、ネットワーク基板の移動
同じコントローラ内での出力、入力、ネットワーク基板の移動(RIO 使用時)
同じステーション内での出力、入力、ネットワーク基板の移動
異なるステーション間での出力、入力、ネットワーク基板の移動
同じステーション内での出力、入力、ネットワーク基板の移動(RIO 使用時)
異なるステーション間での出力、入力、ネットワーク基板の移動(RIO 使用時)
- 例 -異なるステーション間での出力、入力、ネットワーク基板の移動(RIO 使用時)
PU866(1)
D I 9 3 4
FL911
PU866(1)
RIO タスク
S A 9 1 1
SA911
D O 9 3 4
DO934移動
PU866(2)
MS タスク
TN811
RIOタスク
TN811
DI934
FL911
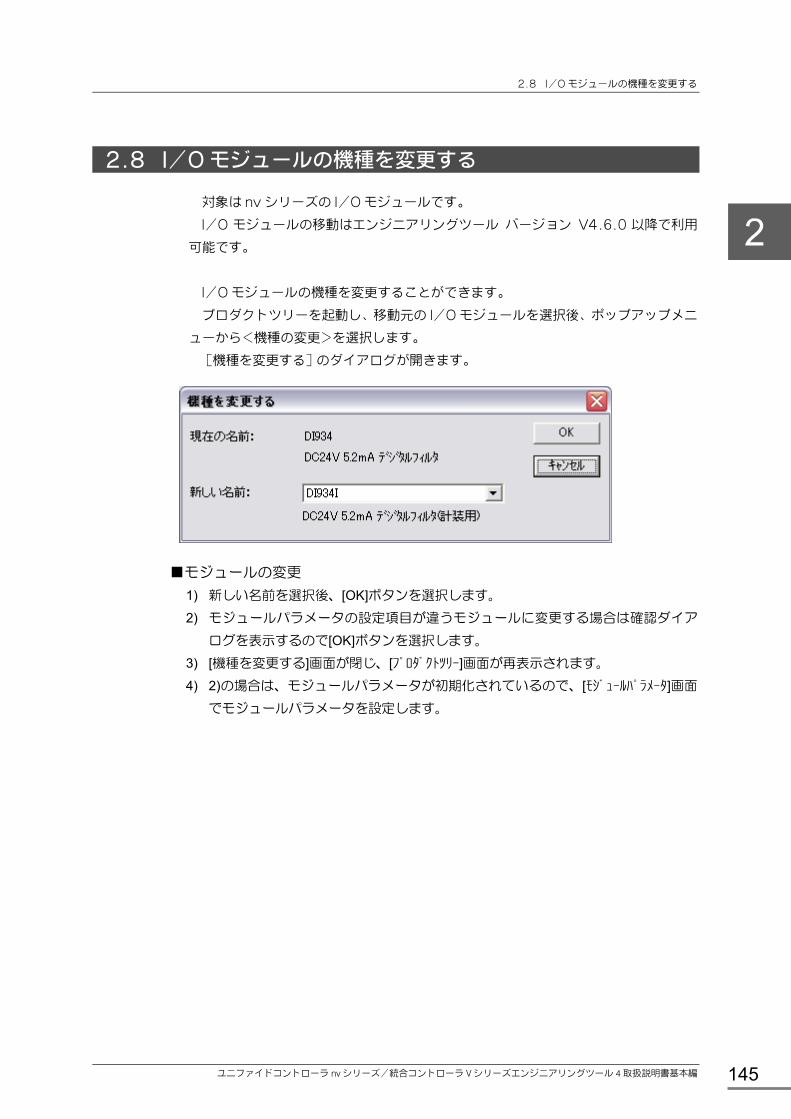
2.8 I/O モジュールの機種を変更する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 145
2.8 I/O モジュールの機種を変更する
対象は nv シリーズの I/O モジュールです。
I/O モジュールの移動はエンジニアリングツール バージョン V4.6.0 以降で利用
可能です。
I/O モジュールの機種を変更することができます。
プロダクトツリーを起動し、移動元の I/O モジュールを選択後、ポップアップメニ
ューから<機種の変更>を選択します。
[機種を変更する]のダイアログが開きます。
■モジュールの変更
1) 新しい名前を選択後、[OK]ボタンを選択します。
2) モジュールパラメータの設定項目が違うモジュールに変更する場合は確認ダイア
ログを表示するので[OK]ボタンを選択します。
3) [機種を変更する]画面が閉じ、[プロダクトツリー]画面が再表示されます。
4) 2)の場合は、モジュールパラメータが初期化されているので、[モジュールパラメータ]画面
でモジュールパラメータを設定します。

第 2 章 ハードウェアの登録
6E8C4890 146
■変更可能なモジュールの一覧
1 DI934 DI934I DI934T DI944 DI934S
2 IN956 IN966 DI936 DI937
3 DO936 AC963 RO966
4 AI918 AI918F AI918D AI938 AI928 RT918C RT918
5 AI919 AI929D AI969 TC919
6 AB932J AB933J AB934J AI914
7 AB932N AB933N AB934N AB934JA AB935J AB935N AB936J
8 AO928 AO928F AO938
9 AO934F AO954F
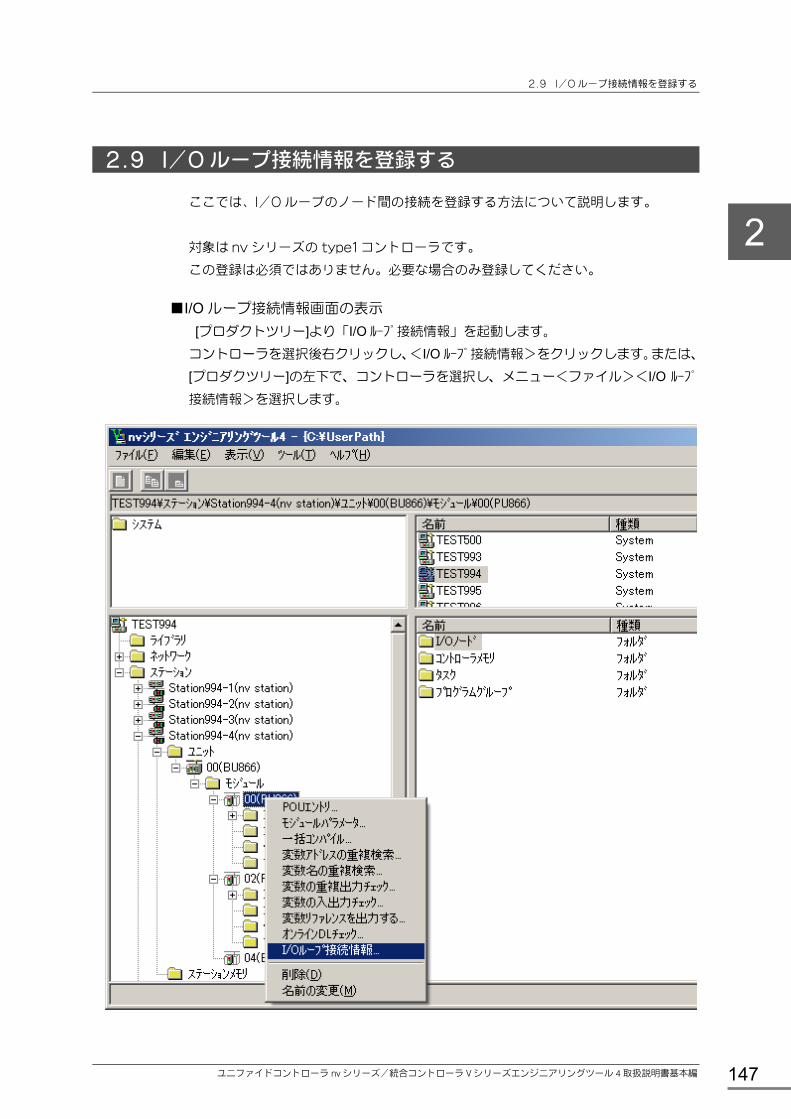
2.9 I/O ループ接続情報を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 147
2.9 I/O ループ接続情報を登録する
ここでは、I/O ループのノード間の接続を登録する方法について説明します。
対象は nv シリーズの type1 コントローラです。
この登録は必須ではありません。必要な場合のみ登録してください。
■I/O ループ接続情報画面の表示
[プロダクトツリー]より「I/O ループ接続情報」を起動します。
コントローラを選択後右クリックし、<I/O ループ接続情報>をクリックします。または、
[プロダクツリー]の左下で、コントローラを選択し、メニュー<ファイル><I/O ループ
接続情報>を選択します。

第 2 章 ハードウェアの登録
6E8C4890 148
■登録方法の初期設定
[I/O ループ接続情報]を一度も表示していないコントローラの場合、[I/O ループ接続情
報]の起動時に“グラフィック”か“リスト”を選択するダイアログを表示します。
登録方法を選択して[OK]をクリックします。
登録方法はコントローラ単位で記憶します。
次回[I/O ループ接続情報]を起動すると選択されている登録方法で表示します。
■グラフィック形式での登録
[I/O ループ接続情報]画面の描画例]

2.9 I/O ループ接続情報を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 149
[I/O ループ接続情報]画面の編集操作]
1) メニュー<編集><編集可能>、またはツールボタンの[編集可能]を選択して、
編集モードにします。
未接続ノード画面を自動で表示します。
2) [未接続ノード]ダイアログからノードをドラッグ&ドロップして配置します。
3) 全てのノードの端子間を結線します。
結線は実機と同じコネクタ間を接続します。
端子は未結線時は赤色■で、結線後は黒色●で表示します。
4)必要に応じて線、四角、テキストをドラッグ&ドロップして配置します。
・ 各図形の最大描画数は以下のとおりです。
図形名 最大数
線 64
四角 64
テキスト 256

第 2 章 ハードウェアの登録
6E8C4890 150
・ 線の折れ点の最大数は 16 です。
・ ノードや図形の表示順序を変更したい場合は、メニュー<編集><順序>の<前面
へ移動>か<背面へ移動>をクリックします。または右クリックメニュー<順序>
の<前面へ移動>か<背面へ移動>をクリックします。
・ メニュー<編集><プロパティ>をクリックした場合や、右クリックメニュー<プ
ロパティ>をクリックした場合、選択されている図形のプロパティ画面を表示しま
す。
[線]
項目 設定範囲 初期値
線の幅 0~8 0
線のスタイル 実線、破線、点線、1 点鎖線 実線
線の色 「色の設定」を参照 黒
矢印 無し、起点、終点、両端 無し
[四角形] 項目 設定範囲 初期値
線の幅 0~8 0
線の色 「色の設定」を参照 黒
内部透明 不透明、透明 不透明
内部の色 「色の設定」を参照 白
[テキスト] 項目 設定範囲 初期値
線の幅 0~8 0
線のスタイル 実線、破線、点線、1 点鎖線、透明 透明
線の色 「色の設定」を参照 黒
テキストの配置 左、中央、右、上・左、上・中央、上・右、下・左、下・中央、下・右
上・左
テキストのフォント 「フォントの設定」を参照 MS ゴシック
内部透明 不透明、透明 透明
内部の色 「色の設定」を参照 白
※テキストの色はプログラムエディタ同様に黒色固定です。
●注記
・ 描画領域は有限で、ノード(SA911)を直接横に 256 個接続して、全てのノードを表示でき
る範囲(長さ)です。縦は横と同じ長さです。

2.9 I/O ループ接続情報を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 151
[色の設定]
[フォントの設定]

第 2 章 ハードウェアの登録
6E8C4890 152
・ズーム
ズームの倍率は 20%~200%の選択方式で、20%刻みで選択できます。
5) 変更した内容はメニュー<ファイル><保存>、またはツールボタンの[保存]に
よって保存します。
6) 未接続ノードがある場合、エラーを表示しますので、接続を見直してください。
7) 編集中に画面を閉じる操作を行った場合は、以下のメッセージを表示して保存確認
します。
「I/O ループ接続情報は変更されています。保存しますか?」
[はい]をクリックすると保存を行い、画面を終了します。
[いいえ]をクリックすると保存せずに画面を終了します。
[キャンセル]をクリックすると画面を終了せずに編集画面に戻ります。
■リスト形式での登録
[I/O ループ接続情報]画面の編集操作]
1) メニュー<編集><編集可能>を選択して、編集モードにします。
2) [相手ノード No.]のプルダウンメニューより、接続する相手のノード番号を登録
します。
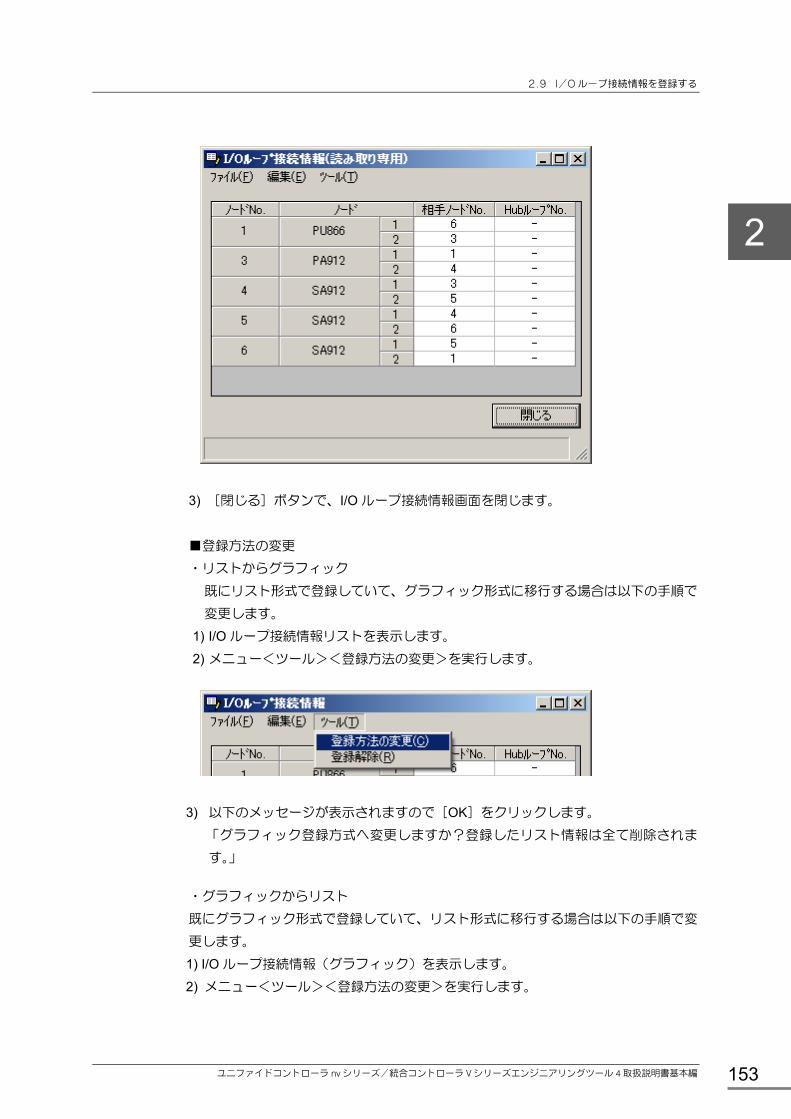
2.9 I/O ループ接続情報を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 153
3) [閉じる]ボタンで、I/O ループ接続情報画面を閉じます。
■登録方法の変更
・リストからグラフィック
既にリスト形式で登録していて、グラフィック形式に移行する場合は以下の手順で
変更します。
1) I/O ループ接続情報リストを表示します。
2) メニュー<ツール><登録方法の変更>を実行します。
3) 以下のメッセージが表示されますので[OK]をクリックします。
「グラフィック登録方式へ変更しますか?登録したリスト情報は全て削除されま
す。」
・グラフィックからリスト
既にグラフィック形式で登録していて、リスト形式に移行する場合は以下の手順で変
更します。
1) I/O ループ接続情報(グラフィック)を表示します。
2) メニュー<ツール><登録方法の変更>を実行します。

第 2 章 ハードウェアの登録
6E8C4890 154
3) 以下のメッセージが表示されますので[OK]をクリックします。
「リスト登録方式へ変更しますか?登録したグラフィック情報は全て削除されま
す。」
■登録解除
I/O ループ接続情報の登録を解除し、I/O ループ詳細アラーム表示を使用する場合は、
以下の手順で実行します。
1) メニュー<ツール><登録解除>を実行します。
(グラフィック)
(リスト)
2) 以下のメッセージが表示されますので[はい]をクリックします。
「I/O ループ接続情報をクリアします。よろしいですか。」

155
第 3 章 変数の登録
3.1 コントローラ変数を登録する······················································157
3.2 ステーション変数を登録する······················································163
3.3 I/O 変数を登録する ···································································169
3.4 ネットワーク変数を登録する······················································172
3.5 ユーザデータ型(構造体)を定義する ·······································183
3.6 TC-net100 を経由して入出力する ···········································185
3.6.1 TC-net100 を経由して I/O へ出力する ·····················185
3.6.2 TC-net100 を経由して I/O から入力する··················187
3.7 入出力データを TC-net100 へ転写する···································189
3.7.1 /O への出力データを TC-net100 へ転写する ···········189
3.7.2 I/O からの入力データを TC-net100 へ転写する·······191

第 3 章 変数の登録
6E8C4890 156
変数には、下記があります。
・ローカル変数
プログラム内部だけで使用する変数で、外部に公開されません。
・コントローラ変数
コントローラ内で使用する変数で、複数の制御プログラムでアクセスすることができま
す。
・ステーション変数
メインモジュール(コントローラ、Ethernet、TC-net 等)間でデータの授受を行う
ための共有メモリです。ステーション内で、同じ変数名でプログラミングできます。
・I/O 変数
ステーションの外に存在するプロセス入出力信号のことです。ステーション毎に構築さ
れる入出力カードを介して信号が入出力されます。
・ネットワーク変数
スキャン伝送方式の制御 LAN 上のスキャンデータです。この LAN が接続されている
ステーション間では、同じ変数名を使用してプログラミングできます。
ここでは、以下の項目について説明します。
3.1 コントローラ変数を登録する
3.2 ステーション変数を登録する
3.3 I/O 変数を登録する
3.4 ネットワーク変数を登録する
3.5 ユーザデータ型(構造体)を定義する
3.6 TC-net100 を経由して入出力する
3.6.1 TC-net100 を経由して I/O へ出力する
3.6.2 TC-net100 を経由して I/O から入力する
3.7 入出力データを TC-net100 へ転写する
3.7.1 /O への出力データを TC-net100 へ転写する
3.7.2 I/O からの入力データを TC-net100 へ転写する

3.1 コントロール変数を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 157
3.1 コントローラ変数を登録する
コントローラ変数(コントローラ内で使用する、複数の制御プログラムで共有する変
数)を登録します。
■コントローラ変数を開く
1) [プロダクトツリー]にて、コントローラ配下の[コントローラメモリ]をクリック
します。
2) [プロダクトツリー]右側の[コントローラメモリ]のアイコン(例:SW,DW,User
等)をクリックし、メニュー<ファイル><コントローラ変数>を選択します。
■編集ロック
起動時は編集ロック(登録内容の変更・削除不可)状態になっています。
既存登録の入力操作を行なう場合には、編集ロックを解除してください。
なお、追加行(左端の列に'*'がついている行)による追加は、いつでも可能です。

第 3 章 変数の登録
6E8C4890 158
■変数を登録する
[変数]をマウスでクリックします。入力可能な状態になりますので変数名を入力しま
す。
[データ型]には、変数のデータ型を入力します。
[値]には、変数の値を入力します。データ型が基本型のときに入力できます。
[コメント]には、変数のコメントを入力します。
[RIO 指定]には、RIO 指定“する”か“しない”を指定します。
※nv コントローラ type1 の SW 変数の時のみ
[読み出し専用]には、変数の値を定数とするときに、’Yes’を入力します。
[ワード No]には、コントローラ内のワードアドレスを入力します。入力を省略すると、
自動的に割り付けます。
[ビット No]には、変数が BOOL 型のときにビット No.を入力します。
変数を削除する場合は、削除したい行の左端の列をマウスでクリックし、1行選択され
た状態でキーボードから[Del]キーを押します。
●注記
・ エンジニアリングをより安全におこなっていただくために、登録の変更・削除時には以下のよ
うに動作します。
1) 変数宣言においてコントローラ変数を削除しても、その後削除したアドレスには自動割付さ
れません。
2) 変数宣言においてコントローラ変数のデータ型を変更しても、その後変更前のアドレスには
自動割付されません。
3) 変数宣言においてコントローラ変数のアドレスを変更しても、その後変更前のアドレスには
自動割付されません。
4) 1)~3)操作を繰り返していくと自動割付が可能な空きアドレスが無くなり、コントローラ
変数が登録できなくなることがあります。このときは、一括コンパイルを実行してください。
自動割付されなかったアドレスにも再度割付が可能となります。
■変数を検索する
[検索する文字]に検索したい変数名を入力し、[検索]ボタンをクリックします。
■変数の表示順を変える
[表示順]の[アドレス]をクリックすると、ワード No 順にソートします。[変数]を
クリックすると変数名順にソートします。

3.1 コントロール変数を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 159
■変数メンバを登録する
データ型がユーザデータ型(構造体)または、配列型のときは、[変数メンバ]に展開
し、値を入力できます。
1)データ型がユーザデータ型(構造体)または、配列型の変数の場合は、行をマウスで
ダブルクリックするか、行を選択後、[変数メンバの表示]ボタンをクリックします。
■ ドラッグ&ドロップ操作
変数名をドラッグし、[データ値モニタ]、[データビュー]画面にドロップするとモニ
タ対象として登録できます。
また[プログラムエディタ]画面にドロップすると変数名として使用できます。
■ 標準変数を登録する
「1.3.17 コントローラ変数」の標準のコントローラ変数を登録できます。
編集ロックを解除し、[標準変数の登録]ボタンをクリックします。登録後、変数画面を
再表示してください。

第 3 章 変数の登録
6E8C4890 160
■ RIO の特殊レジスタ(SW レジスタ)に変数を登録する(MELPLAC I/O 接続の場
合)
MELPLAC I/O 用の RIO コントローラで、内部の I/O 縮退情報を上位コントローラで
確認できるように、Tc-net100 上のネットワーク変数として割付ける際に使用します。
変数登録は専用の画面にて行い、その操作は I/O 変数画面と同様です。操作方法につ
いては、「3.3 I/O変数を登録する」を参考にしてください。
変数を登録した後は[未定義のネットワーク変数]画面にて該当の変数が表示され、ネ
ットワーク変数として割付けることができるようになります。
SW レジスタ上の主な情報の構成は、以下のとおりです。
・I/O 無応答、パリティ、カード異常(重故障):
SWNo. = 80+BB*14+UU (BB:バス No.、UU:ユニット No.)
ビット 0~13 が各スロット No.の状態を表します。(1:異常、0:正常)
・I/O モジュール縮退情報:
SWNo. = 110+BB*14+UU (BB:バス No.、UU:ユニット No.)
ビット 0~13 が各スロット No.の状態を表します。(1:縮退中、0:正常)
■変数を表形式で登録する
データ型が決まっている変数においてインデックスをキーにして表形式で変数名を登
録することができます。
インデックスとは登録メモリエリアを規定のデータ型で分割したもので 0 から割り振
られた数値を指します。
対象はLコントローラ(DS 型)およびユニファイドコントローラ type2 の R,W,DW
変数です。
[固定アドレス登録画面を起動する]
R,W,DW 変数を表示しているとき、画面右上にある[固定アドレス変数登録]ボ
タンを押します。

3.1 コントロール変数を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 161
[変数を登録する]
1) 画面上にある[編集をロックする]のチェックを外します。
2) 表の変数名,値,工業単位,コメントを登録します。
保存は入力が確定した時点で自動的に行われます。
R、Wの場合、変数のデータ型は自動で登録されます。RはREAL型,Wは INT
型です。
DW の場合は、画面上で指定したデータ型で登録されます。
3) 固定アドレス変数画面を閉じるとコントローラ変数画面に登録内容が反映されま
す。
[別のインデックスを表示する]
変数は1ページに 32 点表示されます。他のインデックスに変数を登録する場合は、
画面左上のページジャンプまたはインデックスジャンプにて表示を変更してくださ
い。
ページジャンプ:指定したページに移動します。矢印を押すと次のページに移動し
ます。
インデックスジャンプ:入力したインデックスがあるページを表示します。
[変数をエクスポートする]
登録した変数を外部ファイル(CSV)に出力します。出力範囲は以下のとおりです。
R/W:変数名が登録されている全変数が対象です。(表示している画面単位ではあり
ません)
DW:画面で選択しているデータ型と同じ型の変数が対象です。
以下の手順で実行します。
1) 画面内の[エクスポート]ボタンを押します。

第 3 章 変数の登録
6E8C4890 162
2) エクスポート画面が表示されますのでファイルの格納場所を指定します。
3) [OK]ボタンを押すとエクスポートを実行します。
[変数をインポートする]
エクスポートした CSV ファイルから登録内容を取り込んで登録します。
以下の手順で実行します。
1) 面内の[インポート]ボタンを押します。
2) インポート画面が表示されますのでインポートファイル(CSV)の格納場所を指定
します。
3) インポートの動作を指定する。
マージする:既存の変数に対して上書きします。
入れ替える:全変数を削除した後、インポートします。
エラー中止: 初のエラーで処理を中止しエラー内容を表示します。
エラー続行:全ての変数をチェックし全てのエラーを表示します。
4) [OK]ボタンを押すとインポートを実行します。
※ インポートはインポートファイル内の全変数情報が正しい場合インポートされま
す。ひとつでも不正な登録がある場合、インポートされません。

3.2 ステーション変数を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 163
3.2 ステーション変数を登録する
ステーション変数(メインモジュール間で共有する変数)を登録します。
●重要
・ ステーション変数を登録した場合には、I/Oコネクションを含むコンフィグレーション情報
をコントローラにダウンロードしてください。ダウンロードを実行しないと、一括入出力は実
行されません。
「I/Oコネクション・オンラインダウンロード」の機能を使用すれば、稼働中のコントロー
ラをHALT(一時停止状態)にすることなく、後から追加した変数の一括入出力を実行させ
ることができます。
「I/Oコネクション・オンラインダウンロード」の操作方法については、「7.2 コントローラ
へ一括ダウンロードする」を参照してください。
■ステーション変数を開く
1) [プロダクトツリー]にて、ステーション配下の[ステーションメモリ]をクリック
します。
2) [プロダクトツリー]右側の’User’をクリックし、メニュー<ファイル><ステーシ
ョン変数>を選択します。出力側のコントローラが画面タイトルに表示されます。

第 3 章 変数の登録
6E8C4890 164
■編集ロック
起動時は編集ロック(登録内容の変更・削除不可)状態になっています。
既存登録の入力操作を行なう場合には、編集ロックを解除してください。
なお、追加行(左端の列に'*'がついている行)による追加は、いつでも可能です。
■出力変数を登録する
画面上段の[変数]をマウスでクリックします。入力可能な状態になりますので変数名
を入力します。
[データ型]には、変数のデータ型を入力します。
[コメント]には、変数のコメントを入力します。
[I/O 速度]には、入出力を同期させるタスク(MS:メインタスク、HS:高速タスク)
を指定します。(Sコントローラ:MS 固定、Lコントローラ:MS,HS)
[ワード No]には、ステーショングローバルのワードアドレスを入力します。入力を省
略すると、自動的に割り付けます。
[ビット No]には、変数が BOOL 型のときにビット No.を入力します。
変数を削除する場合は、削除したい行の左端の列をマウスでクリックし、1行選択され
た状態でキーボードから[Del]キーを押します。
■変数を検索する
[検索する文字]に検索したい変数名を入力し、[検索]ボタンをクリックします。
■変数の表示順を変える
[表示順]の[アドレス]をクリックすると、ワード No.順にソートします。[変数]
をクリックすると変数名順にソートします。
■コントローラへの入力変数を割り付ける
1) [入力コントローラ]のプルダウンリストから、変数を入力するコントローラを選択
します。
2) 出力変数の行の左端の列をマウスでクリックし、行が選択された状態にします。複
数行を選択するときは、[Shift]キーまたは、[Ctrl]キーを押しながらマウスでク
リックします。
3) [入力変数に割り当てる]ボタンをクリックします。そうすると、出力変数で選択し
た変数が、入力コントローラの変数(画面下段)に表示されます。

3.2 ステーション変数を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 165
■ドラッグ&ドロップ操作
変数名をドラッグし、[データ値モニタ]、[データビュー]画面にドロップするとモニ
タ対象として登録できます。
また[プログラムエディタ]画面にドロップすると変数名として使用できます。
■ネットワークカードの RAS 変数
ネットワークカードの’標準’を表示しているとき、[標準変数の登録]ボタンを押すと
RAS 変数が登録されます。
登録可能な機種と変数名は下記の表のとおりです。
変数名の 後にはカードのスロット No.が付加されます。
変数名の詳細な意味は各カードの取扱説明書を参照ください。
開始アドレスは、各カードに割り付けられたステーションメモリの先頭からの相対アド
レスです。

第 3 章 変数の登録
6E8C4890 166
[nv シリーズの RAS 変数]
機種 No 変数名 データ型 開始アドレス
TN821 1 TC_HLTYMAP_ ARRAY[0..63] OF DWORD 340608
TN821 2 TC_UHLTYMAP_ ARRAY[0..63] OF DWORD 340736
TN821 3 TC_TALKMAP_ ARRAY[0..2047] OF WORD 342016
TN821 4 TC_RASINF_ ARRAY[0..16383] OF WORD 344064
TN821 5 TC_SOCKET_ ARRAY[0..127] OF WORD 130944
TN822 1 TC_HLTYMAP_ ARRAY[0..63] OF DWORD 340608
TN822 2 TC_UHLTYMAP_ ARRAY[0..63] OF DWORD 340736
TN822 3 TC_TALKMAP_ ARRAY[0..2047] OF WORD 342016
TN822 4 TC_RASINF_ ARRAY[0..16383] OF WORD 344064
TN822 5 TC_SOCKET_ ARRAY[0..127] OF WORD 130944
EN811 1 EN_SOCKET_ ARRAY[0..127] OF WORD 130944
EN811 2 EN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
EN811 3 EN_STSINF_ ARRAY[0..14] OF DWORD 130656
FN812 1 FN_SOCKET_ ARRAY[0..127] OF WORD 130944
FN812 2 FN_SOCKET2_ ARRAY[0..127] OF WORD 130784
FN812 3 FN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
FN812 4 FN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
FN812 5 FN_STSINFA_ ARRAY[0..14] OF DWORD 130656
FN812 6 FN_STSINFB_ ARRAY[0..14] OF DWORD 130400
FN862 1 FN_SOCKET_ ARRAY[0..127] OF WORD 130944
FN862 2 FN_SOCKET2_ ARRAY[0..127] OF WORD 130784
FN862 3 FN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
FN862 4 FN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
FN862 5 FN_STSINFA_ ARRAY[0..14] OF DWORD 130656
FN862 6 FN_STSINFB_ ARRAY[0..14] OF DWORD 130400
[V シリーズの RAS 変数] 機種 No 変数名 データ型 開始アドレス
CN611 1 CN_ONLMAP_ ARRAY[0..1] OF DWORD 65284
CN611 2 CN_HLTYMAP_ ARRAY[0..255] OF DWORD 64768
CN611 3 CN_STSTS_ DWORD 65320
CN612 1 CN_ONLMAP_ ARRAY[0..1] OF DWORD 65284
CN612 2 CN_HLTYMAP_ ARRAY[0..255] OF DWORD 64768
CN612 3 CN_STSTS_ DWORD 65320
CN711 1 CN_ONLMAP_ ARRAY[0..1] OF DWORD 65284
CN711 2 CN_HLTYMAP_ ARRAY[0..255] OF DWORD 64768
CN711 3 CN_STSTS_ DWORD 65320
CN712 1 CN_ONLMAP_ ARRAY[0..1] OF DWORD 65284
CN712 2 CN_HLTYMAP_ ARRAY[0..255] OF DWORD 64768
CN712 3 CN_STSTS_ DWORD 65320
CN623 1 CN_ONLMAP_ ARRAY[0..1] OF DWORD 65284
CN623 2 CN_HLTYMAP_ ARRAY[0..255] OF DWORD 64768
CN623 3 CN_STSTS_ DWORD 65320
CN623 4 CN_LOOPMAP_ ARRAY[0..63] OF DWORD 65408
TN711 1 TC_HLTYMAP_ ARRAY[0..63] OF DWORD 340608
TN711 2 TC_UHLTYMAP_ ARRAY[0..63] OF DWORD 340736

3.2 ステーション変数を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 167
機種 No 変数名 データ型 開始アドレス
TN711 3 TC_TALKMAP_ ARRAY[0..2047] OF WORD 342016
TN711 4 TC_RASINF_ ARRAY[0..16383] OF WORD 344064
TN711 5 TC_SOCKET_ ARRAY[0..127] OF WORD 130944
TN712 1 TC_HLTYMAP_ ARRAY[0..63] OF DWORD 340608
TN712 2 TC_UHLTYMAP_ ARRAY[0..63] OF DWORD 340736
TN712 3 TC_TALKMAP_ ARRAY[0..2047] OF WORD 342016
TN712 4 TC_RASINF_ ARRAY[0..16383] OF WORD 344064
TN712 5 TC_SOCKET_ ARRAY[0..127] OF WORD 130944
TN721 1 TC_HLTYMAP_ ARRAY[0..63] OF DWORD 340608
TN721 2 TC_UHLTYMAP_ ARRAY[0..63] OF DWORD 340736
TN721 3 TC_TALKMAP_ ARRAY[0..2047] OF WORD 342016
TN721 4 TC_RASINF_ ARRAY[0..16383] OF WORD 344064
TN721 5 TC_SOCKET_ ARRAY[0..127] OF WORD 130944
TN722 1 TC_HLTYMAP_ ARRAY[0..63] OF DWORD 340608
TN722 2 TC_UHLTYMAP_ ARRAY[0..63] OF DWORD 340736
TN722 3 TC_TALKMAP_ ARRAY[0..2047] OF WORD 342016
TN722 4 TC_RASINF_ ARRAY[0..16383] OF WORD 344064
TN722 5 TC_SOCKET_ ARRAY[0..127] OF WORD 130944
EN611 1 EN_SOCKET_ ARRAY[0..127] OF WORD 130944
EN611 2 EN_SOCKET2_ ARRAY[0..127] OF WORD 130784
EN611 3 EN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
EN611 4 EN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
EN621 1 EN_SOCKET_ ARRAY[0..127] OF WORD 130944
EN621 2 EN_SOCKET2_ ARRAY[0..127] OF WORD 130784
EN621 3 EN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
EN621 4 EN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
EN631 1 EN_SOCKET_ ARRAY[0..127] OF WORD 130944
EN631 2 EN_SOCKET2_ ARRAY[0..127] OF WORD 130784
EN631 3 EN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
EN631 4 EN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
EN641 1 EN_SOCKET_ ARRAY[0..127] OF WORD 130944
EN641 2 EN_SOCKET2_ ARRAY[0..127] OF WORD 130784
EN641 3 EN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
EN641 4 EN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
EN651 1 EN_SOCKET_ ARRAY[0..127] OF WORD 130944
EN651 2 EN_SOCKET2_ ARRAY[0..127] OF WORD 130784
EN651 3 EN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
EN651 4 EN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
EN661 1 EN_SOCKET_ ARRAY[0..127] OF WORD 130944
EN661 2 EN_SOCKET2_ ARRAY[0..127] OF WORD 130784
EN661 3 EN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
EN661 4 EN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
EN711 1 EN_SOCKET_ ARRAY[0..127] OF WORD 130944
EN711 2 EN_SOCKET2_ ARRAY[0..127] OF WORD 130784
EN711 3 EN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
EN711 4 EN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
EN721 1 EN_SOCKET_ ARRAY[0..127] OF WORD 130944
EN721 2 EN_SOCKET2_ ARRAY[0..127] OF WORD 130784
EN721 3 EN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
EN721 4 EN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
EN731 1 EN_SOCKET_ ARRAY[0..127] OF WORD 130944
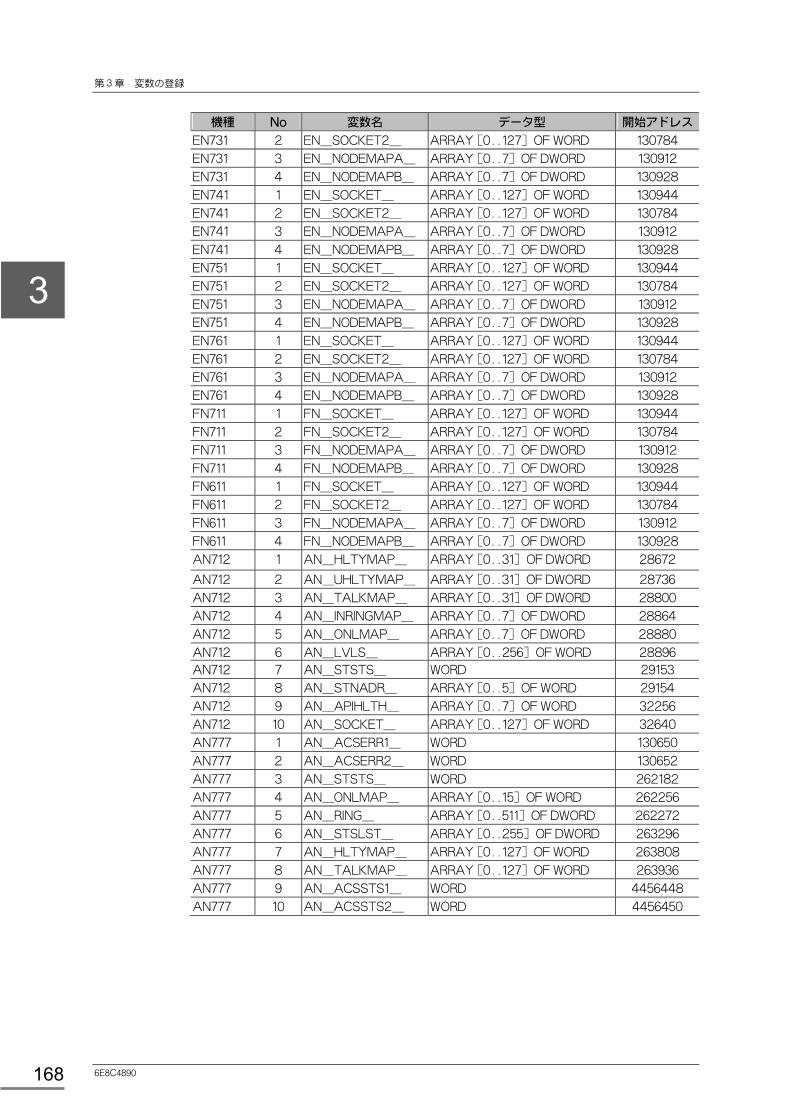
第 3 章 変数の登録
6E8C4890 168
機種 No 変数名 データ型 開始アドレス
EN731 2 EN_SOCKET2_ ARRAY[0..127] OF WORD 130784
EN731 3 EN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
EN731 4 EN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
EN741 1 EN_SOCKET_ ARRAY[0..127] OF WORD 130944
EN741 2 EN_SOCKET2_ ARRAY[0..127] OF WORD 130784
EN741 3 EN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
EN741 4 EN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
EN751 1 EN_SOCKET_ ARRAY[0..127] OF WORD 130944
EN751 2 EN_SOCKET2_ ARRAY[0..127] OF WORD 130784
EN751 3 EN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
EN751 4 EN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
EN761 1 EN_SOCKET_ ARRAY[0..127] OF WORD 130944
EN761 2 EN_SOCKET2_ ARRAY[0..127] OF WORD 130784
EN761 3 EN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
EN761 4 EN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
FN711 1 FN_SOCKET_ ARRAY[0..127] OF WORD 130944
FN711 2 FN_SOCKET2_ ARRAY[0..127] OF WORD 130784
FN711 3 FN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
FN711 4 FN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
FN611 1 FN_SOCKET_ ARRAY[0..127] OF WORD 130944
FN611 2 FN_SOCKET2_ ARRAY[0..127] OF WORD 130784
FN611 3 FN_NODEMAPA_ ARRAY[0..7] OF DWORD 130912
FN611 4 FN_NODEMAPB_ ARRAY[0..7] OF DWORD 130928
AN712 1 AN_HLTYMAP_ ARRAY[0..31] OF DWORD 28672
AN712 2 AN_UHLTYMAP_ ARRAY[0..31] OF DWORD 28736
AN712 3 AN_TALKMAP_ ARRAY[0..31] OF DWORD 28800
AN712 4 AN_INRINGMAP_ ARRAY[0..7] OF DWORD 28864
AN712 5 AN_ONLMAP_ ARRAY[0..7] OF DWORD 28880
AN712 6 AN_LVLS_ ARRAY[0..256] OF WORD 28896
AN712 7 AN_STSTS_ WORD 29153
AN712 8 AN_STNADR_ ARRAY[0..5] OF WORD 29154
AN712 9 AN_APIHLTH_ ARRAY[0..7] OF WORD 32256
AN712 10 AN_SOCKET_ ARRAY[0..127] OF WORD 32640
AN777 1 AN_ACSERR1_ WORD 130650
AN777 2 AN_ACSERR2_ WORD 130652
AN777 3 AN_STSTS_ WORD 262182
AN777 4 AN_ONLMAP_ ARRAY[0..15] OF WORD 262256
AN777 5 AN_RING_ ARRAY[0..511] OF DWORD 262272
AN777 6 AN_STSLST_ ARRAY[0..255] OF DWORD 263296
AN777 7 AN_HLTYMAP_ ARRAY[0..127] OF WORD 263808
AN777 8 AN_TALKMAP_ ARRAY[0..127] OF WORD 263936
AN777 9 AN_ACSSTS1_ WORD 4456448
AN777 10 AN_ACSSTS2_ WORD 4456450

3.3 /O 変数を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 169
3.3 I/O 変数を登録する
I/O 変数(プロセス入出力信号)を登録します。
■I/O 変数を開く
1) [プロダクトツリー]にて、I/O モジュールをクリックします。
2) メニュー<ファイル><I/O 変数>を選択します。
■編集ロック
起動時は編集ロック(登録内容の変更・削除不可)状態になっています。
既存登録の入力操作を行なう場合には、編集ロックを解除してください。
なお、追加行(左端の列に'*'がついている行)による追加は、いつでも可能です。
■I/O 変数を登録する
[I/O ワード No]をクリックし、I/O モジュールのワード No.を入力します。
[ビット No]には、変数が BOOL 型のときにビット No.を入力します。
[変数]には、I/O ワード No.、ビット No.に割り当てる変数名を入力します。
[データ型]には、変数のデータ型を入力します。
[コメント]には、変数のコメントを入力します。

第 3 章 変数の登録
6E8C4890 170
[I/O 速度]には、入出力を同期させるタスク(MS:メインタスク、HS:高速タスク)
を指定します。(Sコントローラ:MS 固定、Lコントローラ:MS,HS)
[出力]には、出力モジュールのとき、信号を出力するコントローラを入力します。
変数を削除する場合は、削除したい行の左端の列をマウスでクリックし、1行選択され
た状態でキーボードから[Del]キーを押します。
プログラム等で一括入出力変数として使用する場合は、上記の I/O 変数名を使用しま
す。また、直接入出力変数として使用する場合は、上記の I/O 変数名の末尾に‘_’(ア
ンダースコア)を付加した変数名を使用します。
●重要
・ I/O の入出力種別が直接入出力のときも、プログラム等で使用する場合は、登録した I/O 変数
名の末尾に‘_’を付加した変数名を使用してください。
■I/O 変数を登録する(nv シリーズの場合)
コントローラが type1 の場合、[タスク指定]を登録します。
I/O 速度 タスク指定 説明
HS/MS/SS スキャン スキャンタスクによる、直結 I/O との一括入出力を指定します。
- RIO RIO タスクによる、直結 I/O と TC-net100 の転送を指定します。
TC-net100 の未定義のネットワーク変数が生成されますので、ネットワーク変数画面にて、該当の送信ブロックに割り付けます。
I/O 速度(RIO タスクの転送速度)は、TC-net100 のネットワーク変数にて設定します。
MS/SS スキャン+RIO スキャンタスクによる、直結 I/O との一括入出力を指定します。
および、RIO タスクによる、TC-net100 への転送を指定します。
TC-net100 のネットワーク変数は、I/O の入出力方向に関係なく、自コントローラの送信側に割り付けます。
■変数を検索する
検索はシステム内の全ての I/O 変数に対して検索し、部分一致検索を行います。
[検索する文字]に検索する変数名を入力し、[検索]ボタンをクリックすると見つかっ
た I/O 変数に移動し、再度[検索]ボタンをクリックすることにより次に見つかった
I/O 変数に移動します。
I/O 検索では、検索する文字に*や?を使うことができます。その場合の検索処理は以
下のとおりになります。
検索する文字 検索される文字 説明
ABC XABC,ABC345,XXXABC45 文字列中に ABC という文字が含まれるもの
A??C XAZZC,AXXC345,XYZA89C45 文字列の中に A と C の間に任意の2文字が含まれているもの
A*C XAZC,AXXXXXC345, XYZAB99C45
文字列の中に A と C の間に任意の複数の文字が含まれているもの

3.3 I/O 変数を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 171
■変数の表示順を変える
[表示順]の[アドレス]をクリックすると、ワード No.順にソートします。[変数]
をクリックすると変数名順にソートします。
■ドラッグ&ドロップ操作
変数名をドラッグし、[データモニタ]、[データビュー]画面にドロップするとモニタ
対象として登録できます。
また[プログラムエディタ]画面にドロップすると変数名として使用できます。
■I/O 変数を登録する(MELPLAC I/O 接続の場合)
1) I/O 変数を登録する前に、モジュールパラメータを登録します。
プロダクツリーで、I/O モジュールを選択し、メニュー<ファイル><モジュールパラメ
ータ>を選択します。
モジュールパラメータの画面が表示されますので、値を登録します。
モジュールパラメータ画面の操作方法については「2.4 モジュールパラメータを登
録する」を参照してください。
2) I/O 変数を開きます。
プロダクツリーで、I/O モジュールを選択し、メニュー<ファイル><I/O 変数>
を選択します。
3) エリアを選択します。
エリアの名前がタブに表示されます。変数を入力するエリアのタブを選択します。
4) I/O 変数を登録します。
操作方法は、この章の「I/O 変数を登録する」を参照してください。
○補足
・ モジュールの種別によっては、[入出力]の列で「一括入力」「一括出力」を選択する場合が有
ります。設定する値については、各モジュールの説明書を参照してください。
5) I/O 変数をネットワーク変数として割り付けます。
操作方法については「3.4 ネットワーク変数を登録する」を参照してください。

第 3 章 変数の登録
6E8C4890 172
3.4 ネットワーク変数を登録する
ネットワーク変数(スキャン伝送方式の制御 LAN が接続されているステーション間
で共有する変数)を登録します。
●重要
・ ネットワーク変数を登録した場合には、I/Oコネクションを含むコンフィグレーション情報
をコントローラにダウンロードしてください。ダウンロードを実行しないと、一括入出力は実
行されません。
「I/Oコネクション・オンラインダウンロード」の機能を使用すれば、稼働中のコントローラを
HALT(一時停止状態)にすることなく、後から追加した変数の一括入出力を実行させるこ
とができます。
「I/Oコネクション・オンラインダウンロード」の操作方法については、「7.2 コントローラへ
一括ダウンロードする」を参照してください。
■送信ブロックを開く
1) [プロダクトツリー]にて、ネットワークをクリックします。
2) [プロダクトツリー]右側の’スキャンメモリ’をクリックし、メニュー<ファイル>
<送信ブロック>を選択します。ネットワーク機種名が画面タイトルに表示されま
す。

3.4 ネットワーク変数を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 173
■送信ブロックデータを登録する
[ワード No.]には、ブロックの先頭ワードアドレスを入力します。
[ワード長]には、ブロックで使用するワードサイズを入力します。
TC-net100 の場合、64 の倍数をリスト選択、またはキー入力指定することで、複数の連続
ブロックを同一ブロック('ブロック範囲')として登録することができます。ネットワーク変数のデータ型
に 64 ワードを超えるユーザ定義型(配列や構造体)を定義する場合には、このワード長を変
更してください。なお、その場合も伝送上のトーカーブロックは 64 ワード固定です。
[伝送速度]には、伝送させる速度(低:遅い、中:普通、高:速い)を指定します。(T
L-S20は未サポート)
[送信ノード]には、制御 LAN のための伝送モジュールを指定します。
[出力コントローラ]には、スキャンデータを出力させるコントローラを入力します。
変数を削除する場合は、削除したい行の左端の列をマウスでクリックし、1行選択され
た状態でキーボードから[Del]キーを押します。
■TC-net10/20の登録時
TC-net10/20の場合、送信ブロックデータは、[送信ブロック]と[モジュ
ールパラメータ]の両方で登録する必要があります。
[プロダクトツリー]にてモジュールを選択後、メニュー<ファイル><モジュールパ
ラメータ>を選択します。
[モジュールパラメータ]画面が開きます。
高速4ブロック、中速4ブロックへの割付を行います。
[先頭ワードNo.]には、ブロックの先頭ワードアドレスを入力します。
[ワード数]には、ブロックで使用するワードサイズを入力します。
ここで割り付けた先頭ワードNo.、ワード数と伝送速度(高速、中速)を[送信ブロッ
ク] に設定します。
[送信ブロック]のどこに割り付けても可ですが、先頭ワードNo.、ワード数、伝送速
度を[モジュ―ルパラメータ]で登録した内容と一致させてください。

第 3 章 変数の登録
6E8C4890 174

3.4 ネットワーク変数を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 175
■ネットワーク変数を開く
登録したブロック No.の行をマウスでダブルクリックするか、画面右上の[ネットワー
ク変数を開く]をクリックします。
■編集ロック
起動時は編集ロック(登録内容の変更・削除不可)状態になっています。
既存登録の入力操作を行なう場合には、編集ロックを解除してください。
なお、追加行(左端の列に'*'がついている行)による追加は、いつでも可能です。

第 3 章 変数の登録
6E8C4890 176
■出力変数を登録する
画面上段の[変数]をマウスでクリックします。入力可能な状態になりますので変数名
を入力します。
[データ型]には、変数のデータ型を入力します。
[コメント]には、変数のコメントを入力します。
[I/O 速度]には、入出力を同期させるタスク(MS:メインタスク、HS:高速タスク)
を指定します。(Sコントローラ:MS 固定、Lコントローラ:MS,HS)
[ワード No]には、ステーショングローバルのワードアドレスを入力します。入力を省
略すると、自動的に割り付けます。
[ビット No]には、変数が BOOL 型のときにビット No.を入力します。
変数を削除する場合は、削除したい行の左端の列をマウスでクリックし、1行選択され
た状態でキーボードから[Del]キーを押します。
■出力変数を登録する(nv シリーズのフィールドネットワークの場合)
コントローラが type1 の場合、[タスク指定]を登録します。
I/O 速度 タスク指定 説明
HS/MS/SS スキャン スキャンタスクによる、直結 I/O との一括入出力を指定します。
- RIO RIO タスクによる、直結 I/O と TC-net100 の転送を指定します。
TC-net100 の未定義のネットワーク変数が生成されますので、ネットワーク変数画面にて、該当の送信ブロックに割り付けます。 I/O速度(RIO タスクの転送速度)は、TC-net100 のネットワーク変数にて設定します。
MS/SS スキャン+RIO スキャンタスクによる、直結 I/O との一括入出力を指定します。
および、RIO タスクによる、TC-net100 への転送を指定します。
TC-net100 のネットワーク変数は、I/O の入出力方向に関係なく、自コントローラの送信側に割り付けます。
■RIO 下の I/O 変数をネットワーク変数に割り付ける
RIO 下の I/O 変数を TC-net100 LAN 上のネットワーク変数に割り付ける場合は、[未
定義変数を開く]ボタンをクリックします。[未定義のネットワーク変数]ダイアログ
が表示されますので、1つまたは、複数の変数を選択し、出力変数にドラッグ&ドロッ
プします。このときの出力変数として割り付ける出力コントローラは、デバイス入力の
場合 RIO コントローラ、デバイス出力の場合 RIO 以外のコントローラになります。
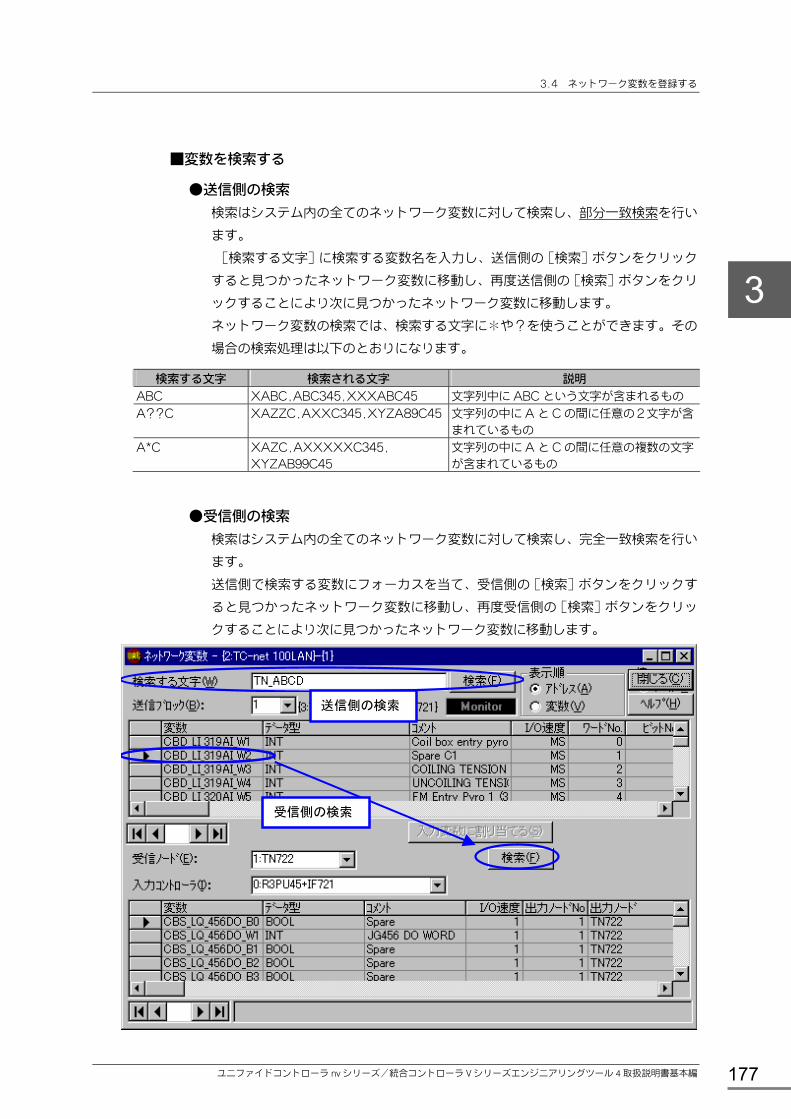
3.4 ネットワーク変数を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 177
■変数を検索する
●送信側の検索
検索はシステム内の全てのネットワーク変数に対して検索し、部分一致検索を行い
ます。
[検索する文字]に検索する変数名を入力し、送信側の[検索]ボタンをクリック
すると見つかったネットワーク変数に移動し、再度送信側の[検索]ボタンをクリ
ックすることにより次に見つかったネットワーク変数に移動します。
ネットワーク変数の検索では、検索する文字に*や?を使うことができます。その
場合の検索処理は以下のとおりになります。
検索する文字 検索される文字 説明
ABC XABC,ABC345,XXXABC45 文字列中に ABC という文字が含まれるもの
A??C XAZZC,AXXC345,XYZA89C45 文字列の中に A と C の間に任意の2文字が含まれているもの
A*C XAZC,AXXXXXC345, XYZAB99C45
文字列の中に A と C の間に任意の複数の文字が含まれているもの
●受信側の検索
検索はシステム内の全てのネットワーク変数に対して検索し、完全一致検索を行い
ます。
送信側で検索する変数にフォーカスを当て、受信側の[検索]ボタンをクリックす
ると見つかったネットワーク変数に移動し、再度受信側の[検索]ボタンをクリッ
クすることにより次に見つかったネットワーク変数に移動します。
送信側の検索
受信側の検索

第 3 章 変数の登録
6E8C4890 178
■変数の表示順を変える
[表示順]の[アドレス]をクリックすると、ワード No.順にソートします。[変数]を
クリックすると変数名順にソートします。
■入力変数に割り当てる
1) [受信ノード]及び [入力コントローラ]のプルダウンリストから、変数を入力する
コントローラを選択します。
2) 出力変数の行の左端の列をマウスでクリックし、行が選択された状態にします。複
数行を選択するときは、[Shift]キーまたは、[Ctrl]キーを押しながらマウスでク
リックします。
3) [入力変数に割り当てる]ボタンをクリックします。そうすると、出力変数で選択し
た変数が、入力コントローラの変数(画面下段)に表示されます。

3.4 ネットワーク変数を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 179
■入力変数に割り当てる(nv シリーズのフィールドネットワークの場合)
コントローラが type1 の場合、[タスク指定]を設定した後、[入力変数に割り当てる]
ボタンをクリックします。
タスク指定については、本章の「■出力変数を登録する(nv シリーズのフィールドネ
ットワークの場合)」を参照してください。
■タスク指定の混在を禁止する(nv シリーズの type1 コントローラの場合)
チェックボックス[タスク指定の混在を禁止する]が表示され、[タスク指定]の設定を
混在禁止にできます。
※I/O 速度の混在は可能
■ドラッグ&ドロップ操作
変数名をドラッグし、[データ値モニタ]、[データビュー]画面にドロップするとモニ
タ対象として登録できます。
また[プログラムエディタ]画面にドロップすると変数名として使用できます。
■変数のオンラインモニタ
登録した変数のオンラインモニタを表示する場合は、画面上の[値]にて<コントロー
ラ>を選択します。
●重要
・ RIO コントローラ配下に接続された、以下のネットワークモジュールの変数をオンラインでモニ
タ表示したい場合は、あらかじめ TC-net 100 上に変数を割り付けておく必要があります。
G3 I/O:TL-S20,DeviceNet,PROFIBUS
5800 I/O:TL-S20,TL-30,TL-100,TL-1000

第 3 章 変数の登録
6E8C4890 180
■RIO 下の FL-net モジュールの RAS 情報に変数を登録する
RIO 下の FL-net モジュール(FL312 など)の RAS 情報(ノードステータス、ノードマップ)を
TC-net100 LAN 上の他のノードにて参照する場合には、以下の手順でネットワーク変
数として登録してください。
1) FL-net LAN の other station を登録
該当の RAS 情報を FL-net 上のスキャンメモリとして登録するためには、仮想的な
ノードから受信しているかのように割付けを行います。このために other station
を使用します。
2) FL-net LAN の送信ブロックに割り付け
下記の構成情報にもとづき、1)にて登録した other station を送信ノードとして送
信ブロックを割付けします。
3) ネットワーク変数の登録
該当のブロックにて、RAS 情報をネットワーク変数として登録します。
4) FL-net LAN 上の入力変数として割り付け
該当のネットワーク変数を RIO ステーションにて受信するように入力変数として割
付けします。
5) TC-net100 LAN 上の出力変数として割付け
該当のネットワーク変数を TC-net100 LAN 上のネットワーク変数として未定義変
数から割り付けます。
6) TC-net100 LAN 上の入力変数として割り付け
該当のネットワーク変数を S3 コントローラなどのステーションにて受信するよう
に入力変数として割付けします。
RAS 情報の構成は、以下のとおりです。
・ノードステータス:
先頭アドレス=3001h (送信ブロックのワード No.に 10 進数で'12289'と登録してくだ
さい。)
サイズ=1ワード
フォーマット: FL311/FL312 の取扱説明書(6E8C4109)の「第 11 章 RAS 機能」
を参照してください。
・サイクリックノードマップ:
先頭アドレス=306Bh (送信ブロックのワード No.に 10 進数で'12395'と登録してく
ださい。)
サイズ=16 ワード
フォーマット: FL311/FL312 の取扱説明書(6E8C4109)の「第 11 章 RAS 機能」
を参照してください。

3.4 ネットワーク変数を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 181
■コントローラ間通信時のインタフェース信号の出力元コントローラの移動の操
作
エンジニアリングツール バージョン V4.6.0 以降で利用可能です。
[ネットワーク変数]画面の送信側で送信元を変更したい変数を選択後、[送信元の変更]ボタ
ンを選択します。
[送信元の変更]ダイアログが開きます。
RIO 指定なしと RIO 指定ありの変数が混在して送信元の変更対象に選択されてている場
合、混在不可のダイアログを表示し、[送信元の変更]画面を起動しません。
■[送信元の変更]画面
変更先の候補の条件。
RIO 指定なしの変数を送信元の変更対象に選択している場合、変更先のブロック No.に
は、変更元以外のブロック No.を候補として表示します。
RIO 指定ありの変数を送信元の変更対象に選択している場合、変更先のブロック No.に
は、変更元と同じ出力コントローラ(V/nV シリーズ)で、変更元以外のブロック No.を候
補として表示します。
ワード長の( )内は、空きサイズを表示します。

第 3 章 変数の登録
6E8C4890 182
■送信元の変更
1) 変更先ブロック No.を選択後、[OK]ボタンを選択します。
2) 確認ダイアログを表示するので[OK]ボタンを選択します。
3) システムの編集権を取る。編集権が取れなかった場合は、編集不可のダイアログを
表示し、処理を中止します。
移動要求前の元の状態に全て戻します。
[OK]ボタンを選択する。9)へ
4) 変更中ダイアログを表示し、送信元の変更処理を行います。
5) [キャンセル] ボタンを選択すると送信元の変更処理を中止します。
変更要求前の元の状態に全て戻します。
6) 変更不可の場合はエラーダイアログを表示し、処理を中止します。
変更要求前の元の状態に全て戻します。
[OK]ボタンを選択します。8)へ
7) 変更先ブロックの空いているワードに自動的に割り付けます。
8) 完了ダイアログを表示するので[OK]ボタンを選択する。
9) [送信元の変更]画面を閉じ、[ネットワーク変数]画面を再表示します。

3.5 ユーザデータ型(構造体)を定義する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 183
3.5 ユーザデータ型(構造体)を定義する
基本型やその配列ではない、任意のデータ型を定義します。
■ライブラリを開く
1) [プロダクトツリー]にて、[ライブラリ]をクリックします。
2) [プロダクトツリー]右側の’ワーク’をクリックし、メニュー<ファイル><ライブ
ラリ>を選択します。
■ユーザデータ型を登録する
空白行の[型名]をマウスでクリックします。入力可能な状態になりますのでユーザデ
ータ型名を入力します。
[元の型名]には、’STRUCT’を入力します。
[コメント]には、ユーザデータ型のコメントを入力します。
ユーザデータ型を削除する場合は、削除したい行の左端の列をマウスでクリックし、1
行選択された状態でキーボードから[Del]キーを押します。
■ユーザデータ型を検索する
[検索する文字]に検索したいユーザデータ型名を入力し、[検索]ボタンをクリックし
ます。
■ユーザデータ型メンバを開く
ユーザデータ型の行をマウスでダブルクリックするか、行を選択後、[構造体メンバの
表示]ボタンをクリックします。

第 3 章 変数の登録
6E8C4890 184
■ユーザデータ型メンバを登録する
空白行の[メンバ名]をマウスでクリックします。入力可能な状態になりますのでユー
ザデータ型のメンバ名を入力します。
[データ型]には、メンバのデータ型を入力します。
[値]には、メンバの初期値を入力します。データ型が基本型のときに入力できます。
[コメント]には、メンバのコメントを入力します。
■ドラッグ&ドロップ操作
データ型をドラッグし、[コントローラ変数]、[ステーション変数][I/O変数][ネ
ットワーク変数]画面にドロップするとデータ型として使用できます。
■メンバの配置を変更する
外部機器との通信する場合等は、必要に応じてメンバを隙間無く配置することが有りま
す。
構造体の画面で、[偶数アドレス強制]の[しない]をクリックすると、メンバは隙間無く
配置されます。
メンバの配置を元に戻す場合は、[偶数アドレス強制]の[する]をクリックします。
●注記
・ [偶数アドレス強制]で[しない]を選択すると、構造体メンバに REAL,DINT,DWORD 等 2 バイトを
超えるデータ型やそれを含む構造体のデータ型を持つ場合に限り、ネットワークまたはステーション変数ではデー
タの同時性が確保できなくなります。

3.6 TC-net100 を経由して入出力する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 185
3.6 TC-net100 を経由して入出力する
nv シリーズの type1 において、TC-net100 を経由して直結 I/O の入出力を行う方
法について説明します。
・3.6.1 TC-net100 を経由して I/O へ出力する
・3.6.2 TC-net100 を経由して I/O から入力する
3.6.1 TC-net100 を経由して I/O へ出力する
nv シリーズの type1 において、TC-net100 を経由して直結 I/O へ出力する方法に
ついて説明します。
■データの流れ
スキャンタスクにて、I/O 出力変数(AAA)のデータを TC-net100 に送信します。
RIO タスクにて、上記の変数(AAA)のデータを TC-net100 から受信し、DO モジュ
ールに出力します。
ロード/ストアプログラム
WORK
IQ レジスタ
AAA
TC-net100 モジュール
RIO タスク
SS/MS タスク
nv シリーズ type1 モジュール
AAAIQ レジスタ
AAA
TC-net I/O Loop コモンメモリ
DO モジュール
AAA
スキャン伝送
直接出力
一括出力

第 3 章 変数の登録
6E8C4890 186
■操作手順
1) I/O 変数画面にて、I/O 出力変数(AAA)を登録します。
「タスク指定」には、「RIO」を指定します。
2) TC-net100 のネットワーク変数画面にて、送信側に自コントローラの送信ブロック
を選択します。
3) 未定義のネットワーク変数画面を開き、1)で登録した変数(AAA)を自コントロー
ラの送信ブロックにドラッグ&ドロップします。
4) ネットワーク変数画面の自コントローラの受信側に、1)で登録した変数(AAA)が
自動割り付けされます。
5) 送信側の「I/O 速度」には、一括入出力の同期タスク(SS/MS)を指定します。
6) 受信側の「I/O 速度」には、RIO タスクの転送速度(HS/MS)を指定します。

3.6 TC-net100 を経由して入出力する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 187
3.6.2 TC-net100 を経由して I/O から入力する
nv シリーズの type1 において、TC-net100 を経由して直結 I/O から入力する方法
について説明します。
■データの流れ
RIO タスクにて、DI モジュールから入力した I/O 入力変数(AAA)のデータを
TC-net100 に送信します。
スキャンタスクにて、上記の変数(AAA)のデータを TC-net100 から受信します。
ロード/ストアプログラム
WORK
IQ レジスタ
AAA
TC-net100 モジュール
RIO タスク
SS/MS タスク
nv シリーズ type1 モジュール
AAAIQ レジスタ
AAA
TC-net I/O Loop コモンメモリ
DI モジュール
AAA
スキャン伝送
直接入力
一括入力

第 3 章 変数の登録
6E8C4890 188
■操作手順
1) I/O 変数画面にて、I/O 入力変数(AAA)を登録します。
「タスク指定」には、「RIO」を指定します。
2) TC-net100 のネットワーク変数画面にて、送信側に自コントローラの送信ブロック
を選択します。
3) 未定義のネットワーク変数画面を開き、1)で登録した変数(AAA)を自コントロー
ラの送信ブロックにドラッグ&ドロップします。
送信側の「I/O 速度」には、RIO タスクの転送速度(HS/MS)を指定します。
4) ネットワーク変数画面の受信側で自コントローラを選択し、3)で登録した自コント
ローラの送信側の変数(AAA)を受信側にドラッグ&ドロップします。
受信側の「I/O 速度」には、一括入出力の同期タスク(SS/MS)を指定します。
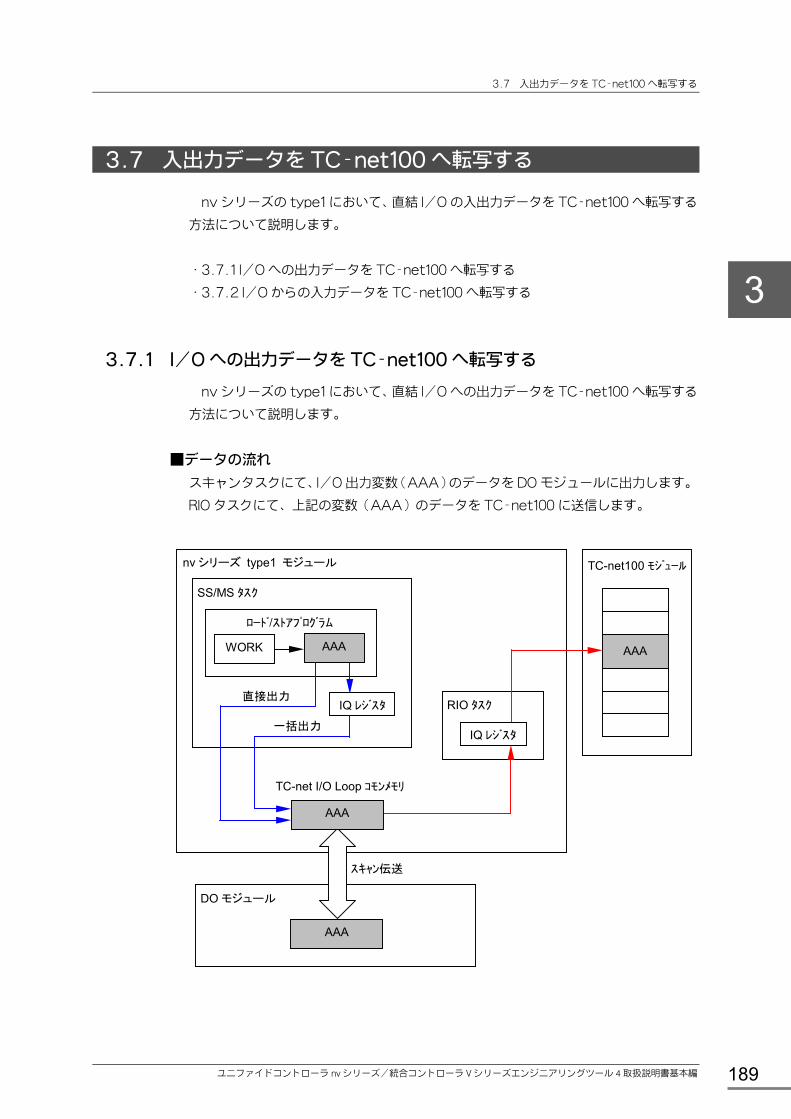
3.7 入出力データを TC-net100 へ転写する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 189
3.7 入出力データを TC-net100 へ転写する
nv シリーズの type1 において、直結 I/O の入出力データを TC-net100 へ転写する
方法について説明します。
・3.7.1 I/O への出力データを TC-net100 へ転写する
・3.7.2 I/O からの入力データを TC-net100 へ転写する
3.7.1 I/O への出力データを TC-net100 へ転写する
nv シリーズの type1 において、直結 I/O への出力データを TC-net100 へ転写する
方法について説明します。
■データの流れ
スキャンタスクにて、I/O 出力変数(AAA)のデータを DO モジュールに出力します。
RIO タスクにて、上記の変数(AAA)のデータを TC-net100 に送信します。
ロード/ストアプログラム
WORK AAA
TC-net100 モジュール
RIO タスク
SS/MS タスク
nv シリーズ type1 モジュール
AAA
IQ レジスタ
TC-net I/O Loop コモンメモリ
DO モジュール
AAA
スキャン伝送
直接出力
一括出力
AAA
IQ レジスタ

第 3 章 変数の登録
6E8C4890 190
■操作手順
1) I/O 変数画面にて、I/O 出力変数(AAA)を登録します。
「タスク指定」には、「スキャン+RIO」を指定します。
「I/O 速度」には、一括入出力の同期タスク(SS/MS)を指定します。
2) TC-net100 のネットワーク変数画面にて、送信側に自コントローラの送信ブロック
を選択します。
3) 未定義のネットワーク変数画面を開き、1)で登録した変数(AAA)を自コントロー
ラの送信ブロックにドラッグ&ドロップします。
送信側の「I/O 速度」には、RIO タスクの転送速度(HS/MS)を指定します。

3.7 入出力データを TC-net100 へ転写する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 191
3.7.2 I/O からの入力データを TC-net100 へ転写する
nv シリーズの type1 において、直結 I/O からの入力データを TC-net100 へ転写す
る方法について説明します。
■データの流れ
スキャンタスクにて、I/O 入力変数(AAA)のデータを DI モジュールから入力します。
RIO タスクにて、上記の変数(AAA)のデータを TC-net100 に送信します。
ロード/ストアプログラム
WORK AAA
TC-net100 モジュール
RIO タスク
SS/MS タスク
nv シリーズ type1 モジュール
AAA
IQ レジスタ
TC-net I/O Loop コモンメモリ
DI モジュール
AAA
スキャン伝送
直接入力
一括入力
AAA
IQ レジスタ

第 3 章 変数の登録
6E8C4890 192
■操作手順
1) I/O 変数画面にて、I/O 入力変数(AAA)を登録します。
「タスク指定」には、「スキャン+RIO」を指定します。
「I/O 速度」には、一括入出力の同期タスク(SS/MS)を指定します。
2) TC-net100 のネットワーク変数画面にて、送信側に自コントローラの送信ブロック
を選択します。
3) 未定義のネットワーク変数画面を開き、1)で登録した変数(AAA)を自コントロー
ラの送信ブロックにドラッグ&ドロップします。
送信側の「I/O 速度」には、RIO タスクの転送速度(HS/MS)を指定します。

193
第 4 章 Tag の登録 Lコントローラに接続するセンサやアクチュエータと信号処理のためのパラメータを登録
します。
これによりプロセス信号の標準処理や OIS での計器表示が決まります。
以下の項目で詳しく説明します。
4.1 Tag を登録する ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・194
4.2 Tag パラメータの意味 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 203
4.2.1 MCS 型 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・203
4.2.2 DS 型・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 216
4.3 Tag をインポートする ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・241
4.4 Tag をエクスポートする ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 244

第 4 章 Tag の登録
6E8C4890 194
4.1 Tag を登録する
タグエディタを使ってタグ No.やパラメータを登録する方法を説明します。
■タグエディタの起動
[プロダクトツリー]で、表示対象のLコントローラかFNカードを選択し、メニュー
<ファイル><タグエディタ>を選択すると、タグエディタが起動されます。
■パラメータの種類
パラメータの表示は、パラメータ種別を変更する事により行えます。
コントローラの機種により選択できるパラメータが異なります。
[MCS 型] パラメータ名 L3PU11 L2PU1* L1PU1*
LC5**
PV:指示計 ○ ○ ○
LP:調節計 ○ ○ ○
PB:押しボタン ○ ○ ○
SQ:シーケンス操作器 ○ ○ -
T:タイマ ○ ○ -
C:カウンタ ○ ○ -
R:実数パラメータ ○ ○ ○
W:整数パラメータ ○ ○ ○
P:折れ線 ○ ○ ○
GD:ガイダンス ○ ○ ○
F:伝送データ実数 ○ ○ ○
I:伝送データ整数 ○ ○ ○
VB:バッチインタフェース ○ ○ -
[DS 型] パラメータ名 L3PU21 L2PU22 FN711
FN611 PU821
PV:指示計 ○ ○ ○ ○
LP:調節計 ○ ○ ○ ○
PB:押しボタン ○ ○ ○ ○
SQ:シーケンス操作器 ○ ○ - ○
TC:時間計・カウンタ ○ ○ - ○
DB:データブロック ○ ○ - ○
T:タイマ ○ ○ - ○
C:カウンタ ○ ○ - ○
R:実数パラメータ ○ ○ - ○
W:整数パラメータ ○ ○ - ○
P:折れ線 ○ ○ - ○
RTT:DS スキャンパラメータ - - ○ ○

4.1 Tag を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 195
■パラメータの表示
画面のパラメータ種別で表示するパラメータを選択します。
表示される列は全部で5列あります。
項目名 選択されたパラメータで登録できるものが表示され
ます。
ツールの値 オフラインで登録した値が表示されます。
コントローラの値 コントローラから読み出した値が表示されます。
データ型 各項目が持っている型が表示されます。
初期値 コピー機能にてご使用いただく初期値が表示されま
す。
表示の選択によって表示される列が違います。
ツール 項目名,ツールの値,データ型,初期値
コントローラ 項目名,コントローラの値,データ型,初期値
ツールとコントローラ 項目名,ツールの値,コントローラの値,データ型,初期値
レコード No.のボタンにより前後の番号を表示できます。数値を直接入力する事も可能
です。
マウスのカーソルを番号の上に持って行くと範囲が表示されます。
●注記
・ レコード No.は、OIS で監視するときの番号付けの約束に従うため、1 から始まっています
・ プログラム内部のインデクス No.は、コントローラの命令語において、0 以外の配列開始 No.
を取ることができないため、0 からになっていますので使用時は注意してください。
・ タグエディタのレコード No.1=プログラムエディタの[0]です。

第 4 章 Tag の登録
6E8C4890 196
■値の入力と保存
値の入力はツールの値とコントローラの値の列でできます。フォーカスを入力する項目
に持っていき、マウスでダブルクリックします。キーボードからは[Enter]を押しま
す。
項目によって文字や数値を入力したり、リストから選択して下さい。
文字や数値を入力する場合、画面の一番下に設定範囲が表示されますので、その範囲で
入力します。
タグ No.だけは入力文字に決まりがあります。
使用できる文字は、以下の通りです。(システム内で重複しないこと)
MCS 型:半角の英字,半角数字,アンダーバーで、先頭は英字であること。
DS 型:半角の英字,半角数字,アンダーバーで、数値として認識されない文字及び予
約語でないこと。
保存は、メニュー<ファイル><保存>にて行います。変更された個所(赤文字)が保
存されます。

4.1 Tag を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 197
■値のコピー
現在画面に表示されている値(ツールの値,初期値)を他のレコードにコピーできます。
コピーは以下の単位で行えます。
・ツールの値(全項目)
・ツールの値(選択項目)
・初期値(全項目)
・初期値(選択項目)
選択項目とは、任意の連続した項目のことで,表示が反転されたもののことです。
選択方法は、画面上のコピーしたい項目の上をマウスの左ボタンを押しながら選択しま
す。
キーボードからは、[Shift]+↑,[Shift]+↓を押すと反転します。
メニューの<編集><パラメータのコピー>を選択すると以下の画面が表示されます。
1)コピー元の設定を行います。
1-1)コピーする値(ツールの値/初期値)を選択します。
1-2)コピーする範囲(全項目/選択項目)を選択します。
2)コピー先の設定を行います。
2-1)コピー開始レコード No.を入力します。
2-2)コピー終了レコード No.を入力します。
3)[OK]をクリックすると、コピー元のデータをコピー先にコピーします。

第 4 章 Tag の登録
6E8C4890 198
■タグ No.の連続登録
タグ No.のみを登録する機能と、既存のタグ変数に’新計装 FB ライブラリ’用のタグ
変数を追加する機能です。
タグ No.のみを 初に入力したい場合や、タグ No.に連続した番号を付ける場合に便利
です。
画面の表示は、メニューの<編集><タグ No..登録>を選択します。
●タグ No.を連続登録する方法
1) タグ No.連続設定のタグ No に文字と[]でくくった数値を入力します。
2) 連続で登録する個数を入力します。
3) [OK]をクリックします。表に登録するタグ No.が赤文字で表示されます。
4) [保存]をクリックすると全ての変更箇所(赤文字)がファイルに書き込まれます。
●既存のタグ変数に’新計装 FB ライブラリ’用の変数を追加する方法
※対象は V2.6.1 以前のツールにて登録したタグ No.です。
1) [再登録]をクリックします。

4.1 Tag を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 199
■表示項目設定
画面に表示する項目を指定します。
メニューの<表示><表示項目設定>を選択すると以下の画面が表示されます。
チェックを付けた項目のみ画面に表示します。
[全指定]ボタン:全ての項目にチェックを付けます。
[全解除]ボタン:全ての項目のチェックを外します。
■I/O 接続の指定
入出力ハードアドレス(L-MCS),入出力点変数名(L-DS,FN)を選択方式で指定で
きます。
メニューの<表示><I/O 接続を選択する>をチェックし、対象項目をダブルクリック
すると選択画面が表示されます。
対象項目は以下の通りです。
●L コントローラ(MCS 型) タグ種別 対象項目 説明 表示 I/O種別
PV IP 入力ハードアドレス AI,PI
LP OA 出力ハードアドレス AO,PO
IA1-IA3 入力ハードアドレス DI,DO PB
OA1-OA3 出力ハードアドレス DO
●L コントローラ(DS 型)/ユニファイドコントローラ type2 タグ種別 対象項目 説明 表示 I/O種別
PV PVA 入力点変数名 AI,PI
LP MVA 出力点変数名 AO,PO
IA1-IA8 入力点変数名 DI,DO PB
OA1-OA8 出力点変数名 DO

第 4 章 Tag の登録
6E8C4890 200
●FN モジュール タグ種別 対象項目 説明 表示変数型名
PV PVA 入力点変数名 INT,UINT,WORD
LP MVA 出力点変数名 INT,UINT,WORD
IA1-IA8 入力点変数名 BOOL PB
OA1-OA8 出力点変数名 BOOL
Lコントローラ
FNモジュール
■タグ No.の検索
タグ No.検索にて移動したいタグ No.を選択、もしくはキー入力すると画面がそのタグ
No に切り替わります。
システム内の全てのタグ No.が対象です。
タグ No.が1つも登録されていない場合は、選択(入力)できません。

4.1 Tag を登録する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 201
■不用項目のマスク
DS タイプの PV、LP、PB タグにおいて、タグ種別(TYPE)によって必要の無い項目
をグレー表示(マスク)にし、値が入力できないようになります。PV の場合、タグ種
別(TYPE)と信号種別(SIG)との組み合わせでマスクします。
以下は、PV でタグ種別が IND で信号種別がパルス以外の場合です。
■初期値の自動設定
計器レンジ RL、RH を入力すると連動して決定できる項目は自動的に入力されます。
値は RH、RL と同じ値が入力されます。(初期値ではアラームを発生させないように設
定します。)
[MCS]
入力項目 設定される項目
RH PH
RL PL
[DS]
入力項目 設定される項目1 設定される項目2
RH PH PHH
RL PL PLL
○補足
・ 「設定される項目」で既に値が変更され、値が0以外のときは自動設定されません。
ただし、値を変更中(赤文字表示)のときは、自動設定の対象となります。

第 4 章 Tag の登録
6E8C4890 202
■PV 番号の選択
PV 番号を入力する項目は、タグ No.やテーブル変数名を併記したリストから選択でき
ます。
表示例)1:FT_2000:PV[0]
[MCS]
タグ種別 PV 番号を選択する項目
指示計(PV) SPV,TM,PM
調節計(LP) PVP
[DS]
タグ種別 PV 番号を選択する項目
指示計(PV) TM,PM,SVP,PVP
調節計(LP) PVP,VP
押しボタン(PB) PVP
○補足
・ PVタグが一つも登録されていない場合はキー入力になります。

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 203
4.2 Tag パラメータの意味
4.2.1 MCS 型
■ Tag パラメータの種類と個数
L コントローラ(MCS 型)は、次の Tag パラメータと個数を持っています。
Tag の種類 意味 L3-type1
L3PU11 L2-type1
L2PU11 L2-type2
L2PU12
L1PU11 L1PU12 L1LG11
LC511 LC512 LC521
PV 指示計 1024 128 288 128 128
LP 調節計 256 32 96 8 8
PB 押しボタン 1024 128 288 32 32
SQ シーケンス操作器 128 16 48 - -
T タイマ 512 192 192 - -
C カウンタ 256 96 96 - -
R 実数パラメータ 2048 768 768 128 128
W 整数パラメータ 2048 768 768 128 128
P 折れ線テーブル 128 48 48 16 16
GD ガイダンス 8(512GD) 3(192GD) 3(192GD) 1(64GD) 1(64GD)
F 伝送パラメータ実数 128 48 48 32 32
I 伝送パラメータ整数 128 48 48 32 32
VB バッチインタフェース 128 48 48 - -
■ PV の意味 項目 種別 意 味
TAG P 計器のIDNoとして付けるタグNo。これは計器を識別するIDNoです。 ●使用できる文字は、半角の英字、数字、アンダーバー。 ●先頭は英字。 ●16 文字以下。 ●システム内で重複しないこと。 ●システムの予約語でないこと。
NAME O 計器につける名称です。 ●32 バイト以下。全角文字は2バイト、半角文字は1バイト。
RH P 指示計レンジの上限値です。実数値。工学値。単位は(工業単位文字)の覧で登録します。 ●計器レンジ下限(RL)より大きいこと。
RL P 指示計レンジの下限値です。実数値。工学値。単位は(工業単位文字)の覧で登録します。 ●計器レンジ上限(RH)より小さいこと。
EU O プロセス値PVの工業単位文字を設定します。 ●8バイト以下。全角文字は2バイト、半角文字は1バイト。
DCML O 計器上にPV値やレンジを表示するときの、小数点以下の桁を指定します。 ●0以上、6以下。

第 4 章 Tag の登録
6E8C4890 204
項目 種別 意 味
SIG P 入力信号の種類を次から選択します。 [入力信号の種類]:[説明] 未使用:この計器の標準処理は一切行われません。 実入力なし:入力カウンタの変換処理は行いませんので、スクリプトでPV値に計算値を代入して内部計器として使用します。 4-20mA2線式:実入力信号で、2線式伝送器からの4-20mAを選択。 4-20mA4線式:実入力信号で、4線式伝送器からの4-20mAを選択。 1-5V:実入力信号で、変換器等からの1-5Vを選択。 Pt100新:実入力信号で、測温抵抗体(新JIS対応Pt100)を選択。 Pt100旧:実入力信号で、測温抵抗体(旧JIS対応Pt100)を選択。 K-THC:実入力信号で、K型熱電対を選択。 T-THC:実入力信号で、T 型熱電対を選択。 J-THC:実入力信号で、J 型熱電対を選択。 E-THC:実入力信号で、E 型熱電対を選択。 B-THC:実入力信号で、B 型熱電対を選択。 R-THC:実入力信号で、R 型熱電対を選択。 S-THC:実入力信号で、S 型熱電対を選択。 パルス接点:実入力信号で、パルス接点入力を選択。 パルス電圧:実入力信号で、パルス電圧入力を選択。 mV:実入力信号で、mV電圧入力を選択。
SENS O センサや伝送器などの信号源を示すIDNoを設定します。内部演算処理には無関係な覚え書きです。
IP P プロセス信号の入力点を MM_BB_UU_SS_PP の書式で登録します。 ●MM はメインスロット No.。 ●BB はバスNo.。 ●UU はユニットNo.。 ●SS はスロットNo.。 ●PP はポイントNo.。
CH P 計器レンジ上限(RH)に相当する入力カウンタの値を設定します。整数。 ●入力カウント下限(CL)より大きいこと。
CL P 計器レンジ下限(RL)に相当する入力カウンタの値を設定します。整数。 ●入力カウント上限(CH)より小さいこと。
UIH P 入力カウント値が入力カウント上限(CH)より大きいとき、センサエラー(PVI)をサプレスするか否かを設定します。 ●YES/NO
UIL P 入力カウント値が入力カウント下限(CL)より小さいとき、センサエラー(PVI)をサプレスするか否かを設定します。 ●YES/NO
LNR P コントローラ内部の標準入力処理で行う線形化処理の種別を選択します。 [補正演算コード]: [説明] 補正無し: プロセス値と入力信号の関係がもともと線形である場合、または線形化を行わない場合に選択します。 DP/F: 差圧から流量に変換します。 DP/F-P: 圧力補正演算後、差圧から流量に変換します。 DP/F-T: 温度補正演算後、差圧から流量に変換します。 DP/F-PT: 温圧補正演算後、差圧から流量に変換します。 RTD: 測温抵抗体(Pt100)の線形変換を行います。 THC: 熱電対の線形変換を行います。 Custom: 標準入力処理で、線形化処理を行わず、スクリプト等の演算で補正演算を行うとき、選択します。
TTL P PV値を瞬時値とするか積算値とするか選択します。瞬時値の計器表示はバーグラフ、積算値の計器表示はカウンタになります。
SPV P [積算指定]が積算値であるときは、PVは積算値を示します。この積算値の元となる瞬時値は、自分に割付けられた信号の他に、他のPV値を選択することができます。ここでは、他のPV値を積算演算対象とする場合に、PVNoを登録します。

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 205
項目 種別 意 味
MAX P PVが積算値のときの 大値を設定します。PV値がこの値を超えると、超えた分がPV値となって、次周期からこの値に積算されて行きます。 大積算値は、このロータリ積算値を定期的に読み取って、使用量などを演算する帳票演算ソフトウェアなどで使用します。実数。PVと同じ工学値。 ●0以上。
PRS P コントローラでは、メインスキャンと高速スキャンの2つのスキャン処理があります。 どちらのスキャン周期で標準入力処理を行うのかを選択します
LC P コントローラでは、瞬時値処理のとき、瞬時値がこの値以下のとき0%として扱います。ローカット値が負のときローカットは行いません。整数。固定少数点第2位。単位%。
FT P コントローラでは、瞬時値処理のとき、次式で計算される1次のローパスフィルタを通します。整数。固定少数点第2位。 ●0以上かつ99未満。
TM P プロセス値が気体流量等で、温度による補正演算を必要とするとき、測定温度を示すPVのNoを登録します。
PM P プロセス値が気体流量等で、圧力による補正演算を必要とするとき、測定温度を示すPVのNoを登録します。
TDG P プロセス値が気体流量等で、温度による補正演算をするとき、基準となる設計温度を登録します。実数。単位℃。
PDG P プロセス値が気体流量等で、圧力による補正演算をするとき、基準となる設計圧力を登録します。実数。単位kPa。
PRD P プロセス値PVの信号源に異常が発生した場合、PV処理エラービット(PRE)が立ちます。ここでは、この信号源の異常の捕らえかたを次から選択します。 [センサ異常のOR]:自分のセンサからの信号または温度、圧力補正用のPVが異常であれば、PV処理エラーとします。 [主センサ異常のみ]:温圧補正点があっても、自分のセンサの信号の異常のみ監視して、PV処理エラー(PRE)とします。 [センサ異常なし]:自分のセンサおよび、補正点のいずれにセンサ異常が起こってもPV処理エラーとしません。
PU P パルス入力のとき、パルス1ヶに相当するプロセス量を登録します。実数。工学値。●0以上
T P 瞬時値演算の時間単位を選択します。実数。 ●SEC(=1),MIN(=60),または HOUR(=3600)。
K P プロセス信号の示す単位と、表示するプロセス値PVの単位の変換係数です。実数。●0以上
D P 単位換算係数と同様に変換係数として働く補正係数です。実数。 ●0以上
PH P プロセス値PVの警報判定上限値です。実数。PVと同じ工学値。 ●PV下限警報値(PL)より大きいこと。
PL P プロセス値PVの警報判定下限値です。実数。PVと同じ工学値。 ●PV上限警報値より小さいこと。
PVB P 上下限判定の不感帯です。実数。PVと同じ工学値。
DPL P プロセス値PVの変化率警報判定値です。実数。単位は工学値/s。 ●0以上。
DPB P 変化率警報の不感帯。実数。単位は工学値/s。 ●0以上。
AGRD O 計器の警報のレベルを選択します。 ●なし、軽警報、または重警報。
AMON O OISにおいて、警報監視するか否かを初期設定します。 ●ONまたはOFF
LOCK O OISで計器のパラメータ変更等の操作を禁止するか否かを初期設定します。 ●YES/NO
SIGN O 計器に表示される札掛け文字を設定します。 ●16 文字以下。全角文字は2バイト、半角文字は1バイト。

第 4 章 Tag の登録
6E8C4890 206
項目 種別 意 味
PVPT O PV値が瞬時値のとき、バーグラフ表示されますが、プロセスオペレーション上のひとつの目印として、置き針の目印を置くことができます。ここでは、その初期値を設定します。実数。
LOG O OISでロギング(警報などの記録や印字)をするか否かを初期設定します。 ●YES/NO
PICT O OIS のアラームタグウィンドウで該当タグを選択した時に展開させる画面を指定します。指定しない場合は、デフォルトとしてポイント画面へ展開します。 ●8バイト以下。ODF ファイル名を指定。
SIMM P [LP]で登録する調節計の指示値PVとして動作するとき、調節計のループバックシミュレーションの方式を登録します。 [シミュレーション方式]:[説明] 単純ループバック:シミュレーションフラグ(SIM)がONのとき、調節計出力からPVに対して自動的にループバックします。 プログラムループバック:シミュレーションフラグ(SIM)がONのとき、自動ループバックは行いません。ループバックはユーザーのプログラムに従います。
DIC P アプリケーションにて PV 値を補正するための PVC を使用するか否かを設定します。
PVC P アプリケーション補正前 PV 値 注意:パラメータエリアにありますが実際はデータです。
PV D 工業単位値 スキャンOFF時(SCN=1の時)設定可能。
SCN D SCN=1で標準入出力処理停止 SCN=0で標準入出力動作実行
SIM D SIM=1でシミュレーション指定となり、MV→PVの単純ループバックを実施します。
SPR D SPR=1で下記アラームをリセットします。 PVH、PVL、PVD、PVI、PRE
RST D RST=1指定でTTLタグの積算値初期化実施
DEU D 将来用
VIU D 将来用
PRU D 将来用
VHU D 将来用
VLU D 将来用
VDU D 将来用
PDE D 入力点(入力モジュール)が異常の場合、PDE=1となります。
PVI D 入力カウント値が入力カウント下限(CL)より小さいとき、または入力カウント値が入力カウント上限(CH)より大きいときにPVI=1となります。
PRE D プロセス値PVの信号源に異常が発生した場合、PRE=1となります。
PVH D PV値>PV上限警報値(PH)となった時、PVH=1となります。
PVL D PV値<PV下限警報値(PL)となった時、PVL=1となります。
PVD D スキャン当たりのPVの変化をdPV、絶対値をABS()とすれば、ABS(dPV)>=PV変化率警報値(DPL)×(スキャン周期)となったとき、PVD=1となります。
‘P’はパラメータ ‘D’はデータ ‘O’は OIS データであることを示します。

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 207
■LP の意味 項目 種別 意 味
PVP P プロセス信号 PV の番号を設定します。 PVのレコードNoを登録します。
MSIG P 出力信号の種類を次から選択します。 [出力信号の種類]:[説明] 未使用:この計器の標準処理は一切行われません。 実出力なし :MV値の実出力処理は行いません。カスケードのマスターループの様に、実出力を行わないときに選択します。 4-20mA:実出力信号で、4-20mAを選択。 パルス幅低速:実出力信号で、低速のパルス幅出力を選択。 パルス幅高速:実出力信号で、高速のパルス幅出力を選択。 パルス列低速:実出力信号で、低速のパルス列出力を選択。 パルス列高速:実出力信号で、高速のパルス列出力を選択。
ACTS O 出力信号を接続する調節弁のIDNoを登録します。これはプログラムの動作には無関係です。 ●16 バイト以下。
OA P プロセス信号の入力点を MM_BB_UU_SS_PP の書式で登録します。 ●MM はメインスロットNo.。 ●BB はバスNo.。 ●UU はユニットNo.。 ●SS はスロットNo.。 ●PP はポイントNo.。
CTL P 計器の種類を下記から選択します。 [制御演算種別]:[説明] なし:計器の演算処理は行われません。 PID 演算:PID調節計を選択します。 サンプルPI演算:サンプルPI調節計を選択します。 M/A 操作器:M/A 操作器を選択します。 比率設定器:比率設定器を選択します。
PRS P 制御演算の周期を選択します。メインスキャンか高速スキャンを選択します。
CDR P PID調節計またはサンプルPI調節計のとき、偏差に対する操作量MVの演算方向を選択します。偏差(SV―PV)増でMV増、または偏差(SV―PV)増でMV減。
MDR P アナログ出力のとき、操作量MVに対するアナログ出力の方向を選択します。
[0-100%で 4―20mA出力]、または[0-100%で 20-4mA出力]から選択。
KP P PID演算の比率ゲイン。実数。単位[倍]。
●0以上。
TI P PID演算の積分時間。実数。単位[min]。
●0以上。
TD P PID演算の微分時間。実数。単位[min]。
●0以上。
ETA P 不完全微分のゲイン(1/η)のη。実数。
●0より大、かつ1以下。
ALP P 2自由度比例係数(α)。実数。
●0以上、1以下。
BET P 2自由度積分係数(β)。実数。
●1以上、2未満。
GAM P 2自由度微分係数(γ)。実数。
●0以上、2未満。
GP P PID、SPI演算のとき、偏差(SV-PV)の0近傍のギャップ幅以内では、ゲイン修飾することができます。ここでは、そのギャップ幅を設定します。実数。単位%。
●0以上、100 以下。

第 4 章 Tag の登録
6E8C4890 208
項目 種別 意 味
GG P PID、SPI演算のとき、偏差(SV-PV)の0近傍のギャップ幅以内では、ゲイン修飾することができます。ここでは、そのゲインを設定します。実数。単位[倍]
●0以上、1以下。
DMV P MVの変化率制限値。実数。単位[%/s]。
●0以上。
MH P MVの上限制限値。実数。単位[%]。
●MV下限制限値(ML)より大。
ML P MVの下限制限値。実数。単位[%]。
●MV上限制限値(MH)より小。
FP P [出力信号種別]がパルスのとき、アクチュエータがフルストローク動作するのに必要なパルス数(パルス列)またはパルス時間(パルス幅)を設定します。実数。
●0以上
BL P [出力信号種別]がパルスのとき、アクチュエータのバックラッシュを設定します。
●0以上、255 以下。
HT P [出力信号種別]がパルスのとき、出力方向が逆転するときの保持時間を設定します。実数。単位[s]。
●0以上、10 以下。
PLB P [出力信号種別]がパルスのとき、微少パルスカウントに対する不要なアクチュエータ動作を止めるために、不感帯を設定します。実数。
●0以上、10 以下。
DL P 偏差(SV-PV)に対する警報レベルを設定します。実数。工学値。
●0以上。
DVB P 偏差警報に対する不感帯を設定します。実数。工学値。
●0以上。
MHA P MVの上限警報値を設定します。実数。
●MV下限警報値(MLA)より大。
MLA P MVの下限警報値を設定します。実数。
●MV上限警報値(MHA)より小。
MVB P MV上下限警報の不感帯を設定します。実数。
●0以上。
VP P [出力信号種別]がパルスのとき、アクチュータの位置や弁の開度を知るために、MVバーグラフに、MVの代わりに、フィードバックしたPV値を表示することができます。ここで、そのPVのNoを設定します。
DT0 P 制御演算の周期を設定します。整数。単位[scan time]。
●0以上。
T0 P サンプルPI調節計のとき、サンプル時間を設定します。整数。単位[0.1s]。
●0以上
T1 P サンプルPI調節計のとき、制御時間を設定します。整数。単位[0.1s]。
●0以上
CLD P PID調節計またはサンプルPI調節計のとき、制御停止(CLI)の判定の仕方を次から選択します。 入力異常で制御停止:PVまたはSVの値が異常(PRE)のとき、CLI=ONとして自動的に制御演算を停止します。 異常処理指定なし:自動的にCLI=ONとしません。制御停止の条件はユーザのプログラムに依存します。
POR P パルス出力要求フラグ(=1で出力要求)
PMV P パルス出力要求カウント
LDP P LDU 小数点位置 ●0以上、4以下。
LDB P LDU 表示方式 バーグラフ表示: ポイント表示:
MVPT O MVバーグラフ上に置かれる、運転指針の位置を設定します。
●ML以上、MH以下。
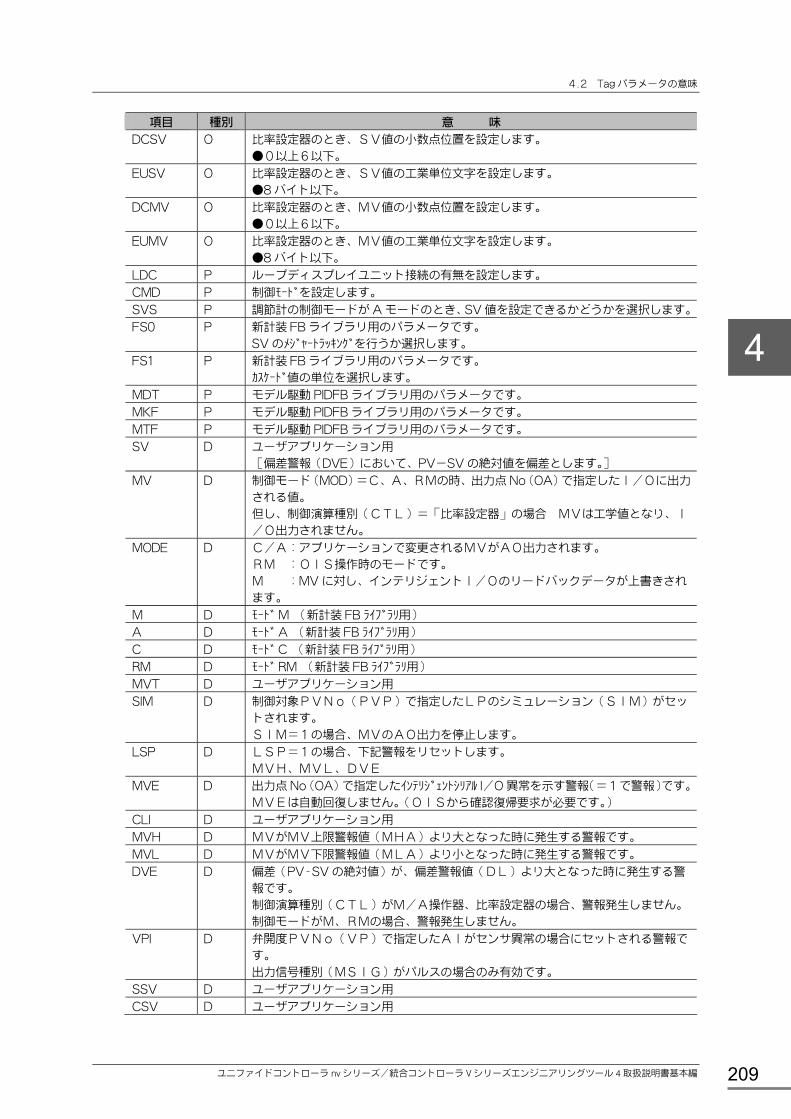
4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 209
項目 種別 意 味
DCSV O 比率設定器のとき、SV値の小数点位置を設定します。 ●0以上6以下。
EUSV O 比率設定器のとき、SV値の工業単位文字を設定します。 ●8 バイト以下。
DCMV O 比率設定器のとき、MV値の小数点位置を設定します。 ●0以上6以下。
EUMV O 比率設定器のとき、MV値の工業単位文字を設定します。 ●8 バイト以下。
LDC P ループディスプレイユニット接続の有無を設定します。
CMD P 制御モードを設定します。
SVS P 調節計の制御モードが A モードのとき、SV 値を設定できるかどうかを選択します。
FS0 P 新計装 FB ライブラリ用のパラメータです。 SV のメジャートラッキングを行うか選択します。
FS1 P 新計装 FB ライブラリ用のパラメータです。 カスケード値の単位を選択します。
MDT P モデル駆動 PIDFB ライブラリ用のパラメータです。
MKF P モデル駆動 PIDFB ライブラリ用のパラメータです。
MTF P モデル駆動 PIDFB ライブラリ用のパラメータです。
SV D ユーザアプリケーション用 [偏差警報(DVE)において、PV-SV の絶対値を偏差とします。]
MV D 制御モード(MOD)=C、A、RMの時、出力点 No(OA)で指定したI/Oに出力される値。 但し、制御演算種別(CTL)=「比率設定器」の場合 MVは工学値となり、I/O出力されません。
MODE D C/A:アプリケーションで変更されるMVがAO出力されます。 RM :OIS操作時のモードです。 M :MV に対し、インテリジェントI/Oのリードバックデータが上書きされます。
M D モード M (新計装 FB ライブラリ用)
A D モード A (新計装 FB ライブラリ用)
C D モード C (新計装 FB ライブラリ用)
RM D モード RM (新計装 FB ライブラリ用)
MVT D ユーザアプリケーション用
SIM D 制御対象PVNo(PVP)で指定したLPのシミュレーション(SIM)がセットされます。 SIM=1の場合、MVのAO出力を停止します。
LSP D LSP=1の場合、下記警報をリセットします。 MVH、MVL、DVE
MVE D 出力点 No(OA)で指定したインテリジェントシリアル I/O 異常を示す警報(=1で警報)です。MVEは自動回復しません。(OISから確認復帰要求が必要です。)
CLI D ユーザアプリケーション用
MVH D MVがMV上限警報値(MHA)より大となった時に発生する警報です。
MVL D MVがMV下限警報値(MLA)より小となった時に発生する警報です。
DVE D 偏差(PV-SV の絶対値)が、偏差警報値(DL)より大となった時に発生する警報です。 制御演算種別(CTL)がM/A操作器、比率設定器の場合、警報発生しません。制御モードがM、RMの場合、警報発生しません。
VPI D 弁開度PVNo(VP)で指定したAIがセンサ異常の場合にセットされる警報です。 出力信号種別(MSIG)がパルスの場合のみ有効です。
SSV D ユーザアプリケーション用
CSV D ユーザアプリケーション用

第 4 章 Tag の登録
6E8C4890 210
項目 種別 意 味
SMV D ユーザアプリケーション用 SMV=ONの場合、制御モードにかかわらずアプリケーションで変更されるMVが、AO出力されます。
CMV D ユーザアプリケーション用
CMP D ユーザアプリケーション用
SEQ D ユーザアプリケーション用
CC D ユーザアプリケーション用
MEU D 将来用
CLU D 将来用
MHU D 将来用
MLU D 将来用
DVU D 将来用
VPU D 将来用 ‘P’はパラメータ ‘D’はデータ ‘O’は OIS データであることを示します。

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 211
■PB の意味 項目 種別 意 味
TAG P 計器のIDNoとして付けるタグNo。これは計器を識別するIDNoです。 ●使用できる文字は、半角の英字、数字、アンダーバー。 ●先頭は英字。 ●16 文字以下。 ●システム内で重複しないこと。 ●システムの予約語でないこと。
NAME O 計器につける名称です。 ●32 バイト以下。全角文字は2バイト、半角文字は1バイト。
NAM1 NAM2 NAM3
O ランプステータス(FI1~FI3)につける名称です。
USE P 該当計器を使用するか否かを登録。 ●使用、未使用。
IA1 IA2 IA3
P プロセス信号の入力点を MM_BB_UU_SS_PP の書式で登録します。 デジタル入力点または出力点を登録します。3点は3ヶの照光式押しボタンのランプの信号に対応します。 ●MM はメインスロット No.。 ●BB はバスNo.。 ●UU はユニットNo.。 ●SS はスロットNo.。 ●PP はポイントNo.。
OA1 OA2 OA3
P プロセス信号の出力点を MM_BB_UU_SS_PP の書式で登録します。 デジタル出力点を登録します。この出力と3点押しボタンのと関係は、出力テーブルでの登録で決定します。 ●MM はメインスロット No.。 ●BB はバスNo.。 ●UU はユニットNo.。 ●SS はスロットNo.。 ●PP はポイントNo.。
INV1 P ランプ1を点灯させるのに、入力点の信号を反転するか否かを設定します。 ●YES/NO
INV2 P ランプ2を点灯させるのに、入力点の信号を反転するか否かを設定します。 ●YES/NO
INV3 P ランプ3を点灯させるのに、入力点の信号を反転するか否かを設定します。 ●YES/NO
INA1 P ランプ1点灯時警報とするか否かを設定します。 ● YES/NO
INA2 P ランプ2点灯時警報とするか否かを設定します。 ●YES/NO
INA3 P ランプ3点灯時警報とするか否かを設定します。 ●YES/NO
UI1 P 照光ボタン1の機能として、ランプの使用の有無を登録します。 ●YES/NO
UI2 P 照光ボタン2の機能として、ランプの使用の有無を登録します。 ●YES/NO
UI3 P 照光ボタン3の機能として、ランプの使用の有無を登録します。 ●YES/NO
AMON O OISにおいて、警報監視するか否かを初期設定します。 ●YES/NO
AGRD O 計器の警報のレベルを選択します。 ●なし、軽警報、または重警報。

第 4 章 Tag の登録
6E8C4890 212
項目 種別 意 味
ONV1 P 出力テーブル処理後の値を出力点1へ出力するのに反転するか否かを設定。 ●YES/NO
ONV2 P 出力テーブル処理後の値を出力点2へ出力するのに反転するか否かを設定。 ●YES/NO
ONV3 P 出力テーブル処理後の値を出力点3へ出力するのに反転するか否かを設定。 ●YES/NO
UO1 P 照光ボタン1の機能として、ボタンの使用の有無を登録します。 ●YES/NO
UO2 P 照光ボタン2の機能として、ボタンの使用の有無を登録します。 ●YES/NO
UO3 P 照光ボタン3の機能として、ボタンの使用の有無を登録します。 ●YES/NO
DA01 DA02 DA03
P 押しボタンが戻ったとき、各点の出力に対する動作を次から選択し、設定します。●無(無処理)/S(出力をセット)/R(出力をリセットする)/T(出力反転)
DA11 DA12 DA13
P ボタン1を押したとき、各点の出力に対する動作を次から選択し、設定します。 ●無(無処理)/S(出力をセット)/R(出力をリセットする)/T(出力反転)
DA21 DA22 DA23
P ボタン2を押したとき、各点の出力に対する動作を次から選択し、設定します。 ●無(無処理)/S(出力をセット)/R(出力をリセットする)/T(出力反転)
DA31 DA32 DA33
P ボタン3を押したとき、各点の出力に対する動作を次から選択し、設定します。 ●無(無処理)/S(出力をセット)/R(出力をリセットする)/T(出力反転)
PRS P コントローラ内部での、該当計器の標準処理周期を設定します。 ●高速(高速スキャン周期)、メイン(メインスキャン周期)
LOCK O OISで計器のパラメータ変更等の操作を禁止するか否かを初期設定します。 ●YES/NO
SIGN O 計器に表示される札掛け文字を設定します。 ●16文字以下。全角文字は2バイト、半角文字は1バイト。
LOG O OISでロギング(警報などの記録や印字)をするか否かを初期設定します。 ●YES/NO
PICT O OIS のアラームタグウィンドウで該当タグを選択した時に展開させる画面を指定します。指定しない場合は、デフォルトとしてポイント画面へ展開します。 ●8バイト以下。ODF ファイル名を指定。
CM1 P OISボタン操作およびアプリケーションのボタン操作要求で使用します。 (パラメータとして、CM1を設定する必要はありません。) =0:ボタン戻り時 (DA0)で設定された動作を実行します。 =1:ボタン1押下時(DA1)で設定された動作を実行します。 =2:ボタン2押下時(DA2)で設定された動作を実行します。 =3:ボタン3押下時(DA3)で設定された動作を実行します。
SCN D スキャンOFF(=1)で、FI1~FI3の更新を停止します。
SIM D 将来用[シミュレーション(=1)で、FO1~FO3 の出力を停止]
SPR D 将来用[アラームサプレス(=1)で警報未確認(IU1~IU3)をリセットする]
LOC D 将来用[インタロック要求中(=1)でボタンステータス(FO1~FO3)をロックする]
IU1 D 将来用
IU2 D 将来用
IU3 D 将来用
UIO D 将来用
FO1 D 制御モード(MOD)=A、RMの時、出力点 No(OA)で指定したI/Oに出力されるステータスです。
FO2 D 制御モード(MOD)=A、RMの時、出力点 No(OA)で指定したI/Oに出力されるステータスです。

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 213
項目 種別 意 味
FO3 D 制御モード(MOD)=A、RMの時、出力点 No(OA)で指定したI/Oに出力されるステータスです。
IOE D 入力点 No(IA)、出力点 No(OA)で指定したインテリジェントシリアル I/O 異常を示す警報(=1で警報)です。
FI1 D 入力点 No(IA)で指定したI/Oから入力されるステータスです。
FI2 D 入力点 No(IA)で指定したI/Oから入力されるステータスです。
FI3 D 入力点 No(IA)で指定したI/Oから入力されるステータスです。
MODE D A :アプリケーションで変更されるFOが、DO出力されます。 RM:OISボタン操作時のモードです。 M :FOに対し、インテリジェントI/OのリードバックDOが上書きされます。
M P モード M (新計装 FB ライブラリ用)
A P モード A (新計装 FB ライブラリ用)
RM P モード RM (新計装 FB ライブラリ用) ‘P’はパラメータ ‘D’はデータ ‘O’は OIS データであることを示します。
■SQ の意味
項目 種別 意 味
TAG P 計器のIDNoとして付けるタグNo。これは計器を識別するIDNoです。 ●使用できる文字は、半角の英字、数字、アンダーバー。 ●先頭は英字。 ●16 文字以下。 ●システム内で重複しないこと。 ●システムの予約語でないこと。
NAME O 計器につける名称です。 ●32 バイト以下。全角文字は2バイト、半角文字は1バイト。
PNAM1-17
O シーケンス・オペレーションに含まれる、工程の名前です。 ●12 バイト以下。全角文字は2バイト、半角文字は1バイト。
AGRD O 計器の警報のレベルを選択します。 ●なし、軽警報、または重警報。
AMON O OISにおいて、警報監視するか否かを初期設定します。 ●YES/NO
LOCK O OISで計器のパラメータ変更等の操作を禁止するか否かを初期設定します。 ●YES/NO
SIGN O 計器に表示される札掛け文字を設定します。 ●16 文字以下。全角文字は2バイト、半角文字は1バイト。
LOG O OISでロギング(警報などの記録や印字)をするか否かを初期設定します。 ●YES/NO
PICT O OIS のアラームタグウィンドウで該当タグを選択した時に展開させる画面を指定します。指定しない場合は、デフォルトとしてポイント画面へ展開します。 ●8バイト以下。ODF ファイル名を指定。
RUN D RUNモード RUN/HOLD=1/0
SSS D シングルステップモード ON/OFF=1/0
SPR D アラームサプレス ON/OFF=1/0
SSE D シングルステップ実行 ON/OFF=1/0
STU D [将来用]
ASU D [将来用]
ILA D [将来用]
STA D 渋滞アラーム ON/OFF=1/0
ASA D アンサアラーム ON/OFF =1/0
ILA D インタロックアラーム ON/OFF =1/0
PHNO0-31
D アクティブ・フェーズ・マップ フェーズが現在アクティブ(1)であるか否か(0)を示します。
‘P’はパラメータ ‘D’はデータ ‘O’は OIS データであることを示します。

第 4 章 Tag の登録
6E8C4890 214
■T の意味 項目 種別 意 味
SET P タイマの設定値を登録します。
CMNT O タイマに関するコメントを全角 18 文字(半角 36 文字)以内で登録します。
EU O 秒タイマ(0.1[sec])と分タイマ(0.1[min])の単位を表示します。
VAL D タイマを起動・停止したとき、その現在値を表示します。
START D 指定したタイマを起動したとき、「ON」を表示します。
STOP D 指定したタイマを停止したとき、「ON」を表示します。
RESET D 指定したタイマの現在値をリセットしたとき、「ON」を表示します。
UP D タイマ起動中、タイマの設定値が現在値を越えるか、または設定値=現在値のとき、「ON」を表示します。
‘P’はパラメータ ‘D’はデータ ‘O’は OIS データであることを示します。
■C の意味 項目 種別 意 味
SET P カウンタの設定値を登録します。
CMNT O カウンタに関するコメントを全角 18 文字(半角 36 文字)以内で表示します。
EU O カウンタの単位(count)を表示します。
VAL D カウンタを操作したとき、その現在値を表示します。
INC D 指定したカウンタの現在値を増加したとき、「ON」を表示します。
DEC D 指定したカウンタの現在値を減少したとき、「ON」を表示します。
RESET D 指定したカウンタの現在値をリセットしたとき、「ON」を表示します。
UP D カウンタ操作中、カウンタ設定値の絶対値を現在値が超えるか、または設定値=現在値のとき、「ON」を表示します。
DOWN D カウンタ操作中、カウンタ設定値の絶対値にマイナス符号をつけた値より現在値が小さくなるか、または設定値=現在値のとき、「ON」を表示します。
‘P’はパラメータ ‘D’はデータ ‘O’は OIS データであることを示します。
■R の意味 項目 種別 意 味
VAL P 実数パラメータの値を登録します。
CMNT O 実数パラメータに関するコメントを全角 18 文字(半角 36 文字)以内で登録します。
EU O 実数パラメータの単位を全角 8 文字(半角 16 文字)以内で登録します。 ‘P’はパラメータ ‘D’はデータ ‘O’は OIS データであることを示します。
■W の意味 項目 種別 意 味
VAL P 整数パラメータの値を登録します。
B0-15 P 整数値をビットパラメータで登録します。
CMNT O 整数パラメータに関するコメントを全角 18 文字(半角 36 文字)以内で登録します。
EU O 整数パラメータの単位を全角 8 文字(半角 16 文字)以内で登録します。
BCOM0-15 O ビットパラメータにコメントを全角 18 文字(半角 36 文字)以内で登録します。‘P’はパラメータ ‘D’はデータ ‘O’は OIS データであることを示します。

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 215
■P の意味 項目 種別 意 味
VAL0X-11X P X座標0から11を単精度浮動小数点で増加方向(X(i+1)-Xi≧0)に登録します。
VAL0Y-11Y P Y座標0から11を単精度浮動小数点で登録します。
CMNT O コメントを全角 18 文字(半角 36 文字)以内で登録します。
XEU O X値の単位を全角 8 文字(半角 16 文字)以内で登録します。
YEU O Y値の単位を全角 8 文字(半角 16 文字)以内で登録します。 ‘P’はパラメータ ‘D’はデータ ‘O’は OIS データであることを示します。
■GD の意味 項目 種別 意 味
MSEG0-63 O ガイダンスメッセージを全角 20 文字(半角 40 文字)以内で登録します。
PICT0-63 O 将来用。全角 4 文字(半角 8 文字)以内。
B0-63 D ガイダンスビット 0/1=OFF/ON ‘P’はパラメータ ‘D’はデータ ‘O’は OIS データであることを示します。
■F の意味
・将来サポート予定
■I の意味
・将来サポート予定
■VB の意味 項目 種別 意 味
VC D VB コマンド
EC D 外部コマンド
VR D VB 切り替え要求
ER D 外部切り替え要求
UN D ユニット No
ST D ステータス
RQ D 要求
Q0-4 D 要求データ 0-4
F D 異常番号
P D オーナ
PD D ポーズ中
W D ポーズド
S D シングルステップ
WW0-8 D 整数予備 0-8
BB0-31 D ビット予備 0-31 ‘P’はパラメータ ‘D’はデータ ‘O’は OIS データであることを示します。

第 4 章 Tag の登録
6E8C4890 216
4.2.2 DS 型
■ Tag パラメータの種類と個数
L コントローラ(DS 型)、DS 接続 Ethernet カードおよび、ユニファイドコントロー
ラ type2 は、次の Tag パラメータと個数を持っています。
Tag の種類 意味 L3-type2
L3PU21 L2-type5L2PU22
FN711 FN611 PU821 PU871
PV 指示計 768 768 256 256 1024
LP 調節計 256 256 128 128 320
PB 押しボタン 1024 1024 512 512 1280
SQ シーケンス操作器 128 128 - - 128
TC 時間計・カウンタ 128 128 - - 128
DB データブロック 256 256 - - 256
R 実数パラメータ 4096 4096 - - 4096
W 整数パラメータ 1280 1280 - - 2560
T タイマ 512 512 - - 512
C カウンタ 128 128 - - 128
P 折れ線テーブル 256 256 - - 256
RTT DS スキャンパラメータ - - 512 512 512
■PV の意味 項 目 説 明 設定値 備 考
タグ番号(TAG)
計器に付けるタグ番号を設定します。これで計器を識別します。 ・使用できる文字は、半角の英字、数字、アンダーバー。・システム内で重複しないこと。 ・システムの予約語でないこと。 なお、英字は、小文字、大文字を区別しません。すべて大文字に変換します。
半角 16 文字以内
タグ名称(NAME)
計器に付ける名称です。 途中にスペースを挿入して登録することによって、OIS での計器表示で半角 16 文字ずつ 2 段でセンタリング、右寄せ、左寄せで表示できるようになります。
半角 32 文字(全角 16 文字)以内
タグ種別(TYPE)
計器の機能種別を選択します。 0:未使用 10:IND 11:AMM 12:PFI 13:TTL 14:WND 16:RM1 17:RM2
説明欄参照
表示パターンモデル番号(MDL)
OIS 上のタグパターンの番号です。0 は標準のタグパターンが使用されます。1~9 は、ユーザが作成した表示パターンが使用されます。
0~9
信号区分番号 (AREA)
システム全体で、計器信号をグループ化するために使用される番号です。この計器が属する番号を決めて登録します。
0~63
自動画面表示番号 (SCNO)
OIS では、計器が警報したとき、自動展開する画面をあらかじめ登録することができます。ここで、その画面の番号を設定します。0 は自動画面展開を行いません。
0~1024
操作禁止設定 (LOCK)
OIS で計器のタグパターンに札掛けしたとき、オペレータの操作を禁止するか許可するかを設定します。
0:許可 1:禁止

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 217
項 目 説 明 設定値 備 考
札掛け表示色 (COLR)
札掛けの表示色を登録します。リストから色名を選択します。 0:白 1:赤 2:緑 3:黄 4:青 5:紫 6:空 7:黒 8:薄灰青 9:暗橙 10:灰水 11:肌 12:明明灰13:明灰 14:灰 15:濃濃灰 16:暗灰 17:灰青 18:灰紫 19:薄灰 20:濃灰 21:赤土 22:抹茶 23:枯草 24:藍 25:濃紫 26:灰緑 27:仄灰 28:薄緑 29:暗白 30:仄黄緑 31:仄濃灰
説明欄参照
札掛け文字(SIGN)
札掛け文字を登録します。 半角 16 文字(全角 8 文字) 以内
警報監視方式(ATYP)
警報の発報と確認の方式を選択します。 0:A 方式 1:B 方式 2:B1 方式 3:C 方式 4:C1 方式 5:D 方式 6:B2 方式
説明欄参照 0:A 方式 1:B 方式を現在サポート
警報監視共通設定(AMON)
計器の警報モニタリングを行う(ON)か否(OFF)かを選択します。
0:ON 1:OFF
制御スキャン設定(PRS)
コントローラでの計器標準処理をどのスキャンで行うか選択します。高速スキャン、またはメインスキャン。
0:メイン 1:高速
サブスケジュール番号(SCH)
メインスキャン処理のとき、計器の標準処理を、負荷を分散するため実行周期をスケジュール化することができます。サブスケジュール番号が 0 のとき、メインスキャンごとに処理が行われます。N(>0)のとき、メインスキャンの N+1 回に 1 回だけ処理されます。
0~255
グルーピング番号(GRP)
「サブスケジュール No.」で説明した、メインスキャンのN+1 回に 1 度の処理を、何回目のメインスキャンで行うかを示す番号を登録します。N 回の処理の内、0~(N-1)までの番号でこれを示します。グルーピング番号が 1 以上のときは、それ未満の回数を設定してください。
0~254
警報監視個別設定(MON)
「警報監視共通設定」が ON のとき、警報点ごとのモニタリングを行う(ON)か否(OFF)かを選択します。
0:ON 1:OFF
警報グレード種別(AGRD)
警報のグレードを警報点ごとに選択します。 0:なし 1:注意報 2:軽警報 3:中警報 4:重警報
説明欄参照 0.1 秒単位
モニタリングタイマ設定値(AMMT)
PV 関連の警報処理をしない時間を 0.1 秒単位で設定します。
タグ種別(TYPE)=11:AMM を選択した場合のみ、この設定は有効です。起動ボタン番号(FONO)、起動ボタン PB 番号(PBNO)と組み合わせて、次の例のように使用します。
(例)AMMT=100、FONO=8、PBNO=1 の設定時、#PB1.FO8 の変化から 10 秒間、PV 値関連の警報処理 [PVHH、PVH、PVL、PVLL、PVD、PVIH、PVIL、PDE、PRE] をすべて実行しない。
0~32767
小数点位置(DCML)
計器上に PV 値やレンジを表示するときの、小数点以下の桁を指定します。
0~5
工業単位文字(EU)
プロセス値 PV の工業単位文字を設定します。 半角 16 文字(全角 8 文字)以内
入力点バス番号/ノード番号(BNO)
nv シリーズの場合、I/O ノード番号を設定します。 TC-net I/O: 3~26 インテリジェントシリアル: 31~34
nv シリーズ用

第 4 章 Tag の登録
6E8C4890 218
項 目 説 明 設定値 備 考
V シリーズの場合、プロセス信号の入力点のバス番号を設定します。
インテリジェントシリアル PI/O を使用して、PV I/O 異常(PDE)を検出させる必要がある場合、入力点バス/ユニット/スロット/ポイント番号を設定してください。
以下の条件が全て成立する場合 (1)I/O モジュール種別:IOM=「インテリジェントシリアル」 (2)PVI/O 異常:PDE が必要 PDE:インテリジェント I/O(AI モジュール)が DU(カードダウン)で
発生する警報 (3)タグ種別:TYPE=「未使用」以外 (4)入力信号種別:SIG=「計算値」「未使用」 以外
V シリーズ用
入力点ユニット番号(UNO)
プロセス信号の入力点のユニット番号を設定します。
入力点スロット番号(SNO)
プロセス信号の入力点のスロット番号を設定します。
入力点ポイント番号(PNO)
プロセス信号の入力点のポイント番号を設定します。
メインスロット番号(CNO)
メインモジュールのスロット番号を設定します。 nv シリーズ専用
シミュレーション方式(SIMM)
AO/PO リストで登録する調節計の指示値 PV として動作するとき、調節計のループバックシミュレーションの方式を選択します。 単純ループバック:シミュレーションフラグ(SIM)が ON
のとき、調節計出力から PV に対して自動的にループバックします。
プログラムループバック:シミュレーションフラグ(SIM)がON のとき、自動ループバックは行いません。ループバックはユーザのプログラムに従います。
0:プログラムループバック 1:単純ループバック
I/O モジュール種別(IOM)
PI/O モジュールの種別を選択します。 0:パラレル PI/O 1:インテリジェントシリアル PI/O 2:シリアル PI/O 3:SSIF 4:F シリーズ PI/O 5:TC-net I/O 6:LP900 シリース ゙“インテリジェントシリアル“、“SSIF“、“Fシリーズ“、”TC-net I/O“を選択し、PV I/O 異常(PDE)の検出が必要な場合、入力点バス/ユニット/スロット/ポイント番号(BNO,UNO,SNO,PNO)を設定してください。
説明欄参照 シリアルPI/O は、将来用。
積算設定値使用(PSS)
積算設定値の使用・不使用を選択します。 タグ種別(TYPE)=13:TTL を選択した場合のみ、この設
定は有効です。積算設定値(PSET)と組み合わせて、次のように使用します。
PSS=0(未使用)の場合、PSET の設定は無効になります。例:PSS=1(使用)、PSET=500
500<PV で、UP 警報発報 PV≦500 で、UP 警報回復
0:不使用 1:使用
冷補点 PV 番号(ZPT)
熱電対の出力を冷接点補償するために使用する信号の PV番号を設定します。
0~1024 将来用
逆折線番号(IPL)
プロセス信号を逆折線補正するための逆折線テーブルの番号を設定します。
0~256 将来用

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 219
項 目 説 明 設定値 備 考
入力信号種別(SIG)
入力信号の種類を選択します。 0:未使用 1:計算値 2:2 線式 3:4 線式 4:1-5V 5:Pt100 新 6:Pt100 旧 7:K-THC 8:T-THC 9:J-THC 10:E-THC 11:B-THC 12:R-THC 13:S-THC 14:パルス接点 15:パルス電圧 16:mV
説明欄参照
入力補正演算種別(LNR)
PCS 内部の標準入力処理で行う線形化処理の種別を選択します。 0:補正無し 1:DP/F 2:DP/F-P 3:DP/F-T 4:DP/F-PT 5:RTD 6:THC 7:Custom 8:力率9:位相角
説明欄参照
入力点変数名(PVA)
プロセス信号の入力点(アナログ入力点)の変数名を直接表記変数で設定します。 ・V シリーズの場合: %MW11.{IQNo.} ・nv シリーズの場合: %MW14.{I/O ループアドレス}
入力カウント上限値(CH)
計器レンジ上限(RH)に相当する入力カウンタの値(整数)を設定します。 CL<CH≦32767
説明欄参照 V シリーズ専用
入力カウント下限値(CL)
計器レンジ下限(RL)に相当する入力カウンタの値(整数)を設定します。入力信号と入力カウントの関係は次のとおりです。 入力信号:入力カウント値 4-20mA:6400~32000 1-5V:6400~32000 測温抵抗体:モジュールの測定レンジに対して、6400~32000 熱電対:モジュールの測定レンジに対して、6400~32000mV:モジュールの測定レンジに対して、-32000~32000 したがって、モジュールの測定レンジと計器レンジを一致させる場合は、CL と CH を表中の値で設定してください。ただし、計器レンジをモジュールの測定レンジより狭くしたい場合は、次の式で求めた、CH と CL を設定します。 CH=CLO+(CHO-CLO)×RH/(mRH-mRL) CL=CLO+(CHO-CLO)×RL/(mRH-mRL) ここで、 CHO :測定レンジ上限に相当する入力カウント値(32000) CLO :測定レンジ下限に相当する入力カウント値(6400 または-32000) mRH :測定レンジ上限値 mRL :測定レンジ下限値 なお、測定レンジは、I/O モジュールに設定するパラメータです。 -32768≦CL<CH
説明欄参照 V シリーズ専用
ローカット設定値(LC)
瞬時値処理で使用するローカット値を設定します。瞬時値処理のとき、瞬時値がこの値以下のとき 0%として扱います。 (参考) 「補正演算コード」で、差圧流量変換を行うとき、開平演算を行います。このため、0%付近のわずかな信号の変化が拡大されて、その結果 PV 値が 0 付近で変動することがあります。このようなとき、ローカット値に 0 付近の正の値を与えて、この変動を除去します。
V シリーズ-1~10 nv シリーズ PU821 -1~10 nv シリーズ PU871 -25~100

第 4 章 Tag の登録
6E8C4890 220
項 目 説 明 設定値 備 考
フィルタ係数(FT)
瞬時値処理で使用する 1 次フィルタのフィルタ定数を設定します。瞬時値処理のとき、次式で計算される 1 次のローパスフィルタを通します。 出力値=入力値×(1-FT/100)+前回出力量×FT/100 (補足) FT は大きくなるほど、急峻な変動を除去するように働きます。 0≦FT<1
説明欄参照
計器レンジ上限値(RH)
指示計レンジの上限値を実数値または工学値で設定します。 単位は(工業単位文字)の項目で設定します。 RL<RH≦999999999
説明欄参照
計器レンジ下限値(RL)
指示計レンジの下限値を実数値または工学値で設定します。 単位は(工業単位文字)の項目で設定します。 -999999999≦RL<RH
説明欄参照
PV 上上限警報値(PHH)
PH≦PHH≦999999999 説明欄参照
PV 上限警報値(PH)
プロセス値 PV の上限警報値を設定します。 PL<PH≦PHH
説明欄参照 実 数
PV 下限警報値(PL)
プロセス値 PV の下限警報値を設定します。 PLL≦PL<PH
説明欄参照 実 数
PV 下下限警報値(PLL)
-999999999≦PLL≦PL 説明欄参照
PV 上下限警報不感帯(PVB)
上下限警報値の不感帯を設定します。 (参考) PV 値の上下限警報発報の仕方 PV≧PH になったとき、上限警報(PVH)が発報します。これ以後 PV≦PH-PVB が成立したとき、回復します。 PV≦PL になったとき、下限警報(PVL)が発報します。これ以後 PV≦PL-PVB が成立したとき、回復します。
0~999999999
PV 変化率警報値(DPL)
プロセス値 PV の変化率警報値を設定します。 0~999999999
PV 変化率警報不感帯(DPB)
PV 変化率警報値の不感帯を設定します。 (参考) PV 値の変化率警報発報の仕方 スキャンあたりの PV の変化を dPV、絶対値を ABS( )とすれば ABS(dPV)≧DPL×(スキャン周期) になったとき、変化率警報(PVD)が発報します。 これ以後、 ABS(dPV)≦(DPL-DPB)×(スキャン周期) になったとき回復します。
0~999999999
温度補正 PV 番号(TM)
温度補正を行うプロセス値 PV の番号を設定します。 プロセス値が気体流量などで、温度による補正演算を必要とするとき、測定温度を示す PV の番号です。
0~1024
圧力補正 PV 番号(PM)
圧力補正を行うプロセス値 PV の番号を設定します。 プロセス値が気体流量などで、圧力による補正演算を必要とするとき、測定温度を示す PV の番号など。
0~1024
温度補正設計温度(TDG)
温度補正を行うための設計温度(℃)を設定します。 プロセス値が気体流量などで、温度による補正演算をするとき、基準となる設計温度です。
0~999999999
実 数

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 221
項 目 説 明 設定値 備 考
圧力補正設計圧力(PDG)
圧力補正を行うための設計圧力(kPa)を設定します。 プロセス値が気体流量などで、圧力による補正演算をするとき、基準となる設計圧力です。
0~999999999
実 数
PV 異常処理種別(PRD)
プロセス値 PV の信号源の異常のとらえ方を選択します。プロセス値 PV の信号源に異常が発生した場合、PV 処理エラービット(PRE)が立ちます。ここでは、この信号源の異常の捕らえかたです。 センサ異常のOR :自分のセンサからの信号または、温度、圧力補正用の PV が異常であれば PV 処理エラーとします。 主センサ異常のみ :温圧補正点があっても、自分のセンサの信号の異常のみ監視して、PV 処理エラー(PRE)とします。 センサ異常なし :自分のセンサまたは、温度補正点のどれに異常が起こっても PV 処理エラーとしません。 0:センサ異常の OR 1:主センサの異常のみ 2:センサ異常なし
説明欄参照
積算入力 PV 番号(SPV)
積算入力する PV 値の番号を設定します。「積算種別コード」が積算値であるときは、PV は積算値を示します。この積算値の元となる瞬時値は、自分に割付けられた信号の他に、他の PV 値を選択することができます。ここでは、他の PV値を積算演算対象とする場合に、PVNo.を登録します。 (参考) 実際のアプリケーションでは、1 つの流量信号から瞬時値と積算値を必要とすることはよくあることです。このとき、ある計器の実入力に、この信号を割り付け、PV を瞬時値としたうえで、他の計器の「積算入力 PVNo.」をこの PVNo.とすれば、PV として積算値が得られます。
0~1024
パルス重み係数(PU)
パルス入力信号の重み係数を設定します。パルス入力の、1パルスに対するプロセス量です。
0~999999999
時間換算係数(T)
瞬時値演算の時間単位を選択します。 0:無し 1:秒 60:分 3600:時
説明欄参照
単位換算係数(K)
プロセス信号の示す単位と、表示するプロセス値 PV の単位の変換係数を設定します。
0~999999999
補正係数(D) 変換係数として働く補正係数を設定します。 (参考) PU、T、K、D の値は、次のプロセス値 PV を求めるときに使用します。 アナログ積算値=(前回積算値)+(今回瞬時値)×D×K×(スキャン周期)/T パルス積算値=(前回カウント数)+(今回パルス値)×PU×D×K) パルス瞬時値=(今回パルス数)×PU×D×K×T/(スキャン周期)
0~999999999
積算上限値(MAX)
PV が積算値のときの 大値を設定します。PV 値がこの値を超えると、超えた分が PV 値となって、次周期からこの値に積算されて行きます。 大積算値は、このロータリ積算値を定期的に読み取って、使用量などを演算する帳票演算ソフトウェアなどで使用します。
0~999999999

第 4 章 Tag の登録
6E8C4890 222
項 目 説 明 設定値 備 考
積算設定値(PSET)
積算設定値を設定します。 タグ種別(TYPE)=13:TTL を選択した場合のみ、この設定は有効になります。積算設定値使用(PSS)と組み合わせて、次のように使用します。 PSS=0(未使用)の場合、PSET の設定は無効になります。例:PSS=1(使用)、PSET=500 500<PV で、UP 警報発報 PV≦500 で、UP 警報回復
RL~RH
起動ボタン番号(FONO)
PV 関連の警報処理をしない時間を設定するための起動ボタンの FO 番号を設定します。 タグ種別(TYPE)=11:AMM を選択した場合のみ、この設定は有効です。起動ボタン番号(FONO)、起動ボタンPB 番号(PBNO)と組み合わせて、次の例のように使用します。 例:AMMT=100、FONO=8、PBNO=1 の設定時、#PB1.FO8 の変化から 10 秒間、PV 値関連の警報処理 [PVHH、PVH、PVL、PVLL、PVD、PVIH、PVIL、PDE、PRE] をすべて実行しない。
0~8
起動ボタン PB番号(PBNO)
PV 関連の警報処理をしない時間を設定するための起動ボタンの#PB 番号を設定します。 タグ種別(TYPE)=11:AMM を選択した場合のみ、この設定は有効です。起動ボタン番号(FONO)、起動ボタンPB 番号(PBNO)と組み合わせて、次の例のように使用します。 例:AMMT=100、FONO=8、PBNO=1 の設定時、#PB1.FO8 の変化から 10 秒間、PV 値関連の警報処理 [PVHH、PVH、PVL、PVLL、PVD、PVIH、PVIL、PDE、PRE] をすべて実行しない。
0~1024
PV スプリットレンジ位置(SPLT)
OIS で表示するスプリットレンジの PV 値バーグラフの、スプリットレンジ基点の位置を設定します。
RL~RH
PV 置き針位置(PVPT)
PV 値が瞬時値のときに表示されるバーグラフに、PV 値の目印となる置き針の初期値を設定します。
RL~RH
積算変化率設定値(DMAX)
PV 積算値の変化率設定値を設定します。 タグ種別(TYPE)=13:TTL を選択した場合のみ、この設定は有効になります。 単位は、工学値/時です。 例:スキャン周期=0.5 秒(500ms)、DMAX=3600 A=1 スキャン周期の PV(積算値)変化の場合 ・DMAX<A×(1/0.5)×3600 で TTE 警報発報し、PV積算を停止する。 ・A×(1/0.5)×3600≦DMAX で TTE 警報回復し、PV積算を再開する。 DMAX=0 と設定した場合、PV(積算値)変化の状態によらず、TTE 警報は発報されず、PV 積算処理も停止しません。
0~999999999
折線番号(PLN)
プロセス信号を折線補正するための折線テーブルの番号を設定します。
0~256 将来用
力率信号方向設定(SGDR)
力率信号の方向を選択します。 タグ種別(TYPE)=12:PFI を選択した場合のみ、この設定は有効です。SGDR=1(負方向)の場合、力率入力変換で反転処理を実行します(正規化後の入力カウントが 100%であれば 0%として変換するなど)。
0:正方向 1:逆方向

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 223
項 目 説 明 設定値 備 考
進み遅れ表示設定 (PDSP)
OIS で表示する力率バーグラフの表示方向を選択します。タグ種別(TYPE)=12:PFI を選択した場合のみ、この設定は有効になります。
0:進み遅れ 1:遅れ進み
入力機器名(SENS)
OIS で表示するための、入力信号源の機器名を設定します。 半角 16 文字(全角8文字)以内
無風判定値(V0)
無風と判定する風速値を設定します。 -3.402823E38~3.402823E38 タグ種別(TYPE)=14:WND を選択した場合のみ、この設定は有効になります。 例:#PV1.TYPE=14(WND)、#PV1.V0=10 の場合、#PV1.PV<10 であれば#PV1 の方位(風向)が「無風」となります。
説明欄参照
風向 PV 番号(PVP)
風向値として変換する#PV を指定します。 タグ種別(TYPE)=14:WND を選択した場合のみ、この設定は有効です。 (例) PV1.TYPE=14(WND)、#PV1.PVP=2 の場合、 #PV2.PV を風向入力とします。例えば、#PV2.PV=0なら#PV1 の方位(風向)が「北」になる。
0~1024
PV 下限センサ異常サプレス設定(UIL)
入力カウント値が入力カウント下限(CL)より小さいとき、センサエラー(PVI)をサプレスするか否かを設定します。
ON:する OFF:しない
PV 上限センサ異常サプレス設定(UIH)
入力カウント値が入力カウント上限(CH)より大きいとき、センサエラー(PVI)をサプレスするか否かを設定します。
ON:する OFF:しない
PV/PVC 直結(DIC)
アプリケーションにて PV 値を補正するためのアトム PVCを使用するか否かを設定します。
PV<>PVC, PV=PVC
入力カウント上限値(DCH)
計器レンジ上限(RH)に相当する入力カウンタの値(倍精度整数)を設定します。(nv シリーズ専用) DCL<DCH≦2147483647
説明欄参照 nv シリーズ専用
入力カウント下限値(DCL)
計器レンジ下限(RL)に相当する入力カウンタの値(倍精度整数)を設定します。(nv シリーズ専用) -2147483648≦DCL<DCH
説明欄参照 nv シリーズ専用
目盛り分割数(DVRM)
計器上にある対数グラフ軸の分割数を設定します。 タグ種別が“RM1” のとき有効です。
0~10 nv シリーズ専用

第 4 章 Tag の登録
6E8C4890 224
■LP の意味 項 目 説 明 設定値 備 考
タグ番号(TAG)
計器に付けるタグ番号を設定します。これで計器を識別します。 ・使用できる文字は、半角の英字、数字、アンダーバー。・システム内で重複しないこと。 ・システムの予約語でないこと。なお、英字は、小文字、大文字を区別しません。すべて大文字に変換します。
半角 16 文字以内
タグ名称(NAME)
計器に付ける名称です。 途中にスペースを挿入して登録することによって、OIS での計器表示で半角 16 文字ずつ 2 段でセンタリング、右寄せ、左寄せで表示できるようになります。
半角 32 文字(全角16文字)以内
タグ種別(TYPE)
計器の機能種別を選択します。 0:未使用 20:PID 21:SPI 22:M/A 23:RS 24:TPI 25:SET 27:MH
説明欄参照
表示パターンモデル番号(MDL)
OIS 上のタグパターンの番号です。0 は標準のタグパターンが使用されます。1~9 は、ユーザが作成した表示パターンが使用されます。
0~9
信号区分番号 (AREA)
システム全体で、計器信号をグループ化するために使用される番号です。この計器が属する番号を決めて登録します。
0~63
自動画面表示番号 (SCNO)
OIS では、計器が警報したとき、自動展開する画面をあらかじめ登録することができます。ここで、その画面の番号を設定します。0 は自動画面展開を行いません。
0~1024
操作禁止設定 (LOCK)
OIS で計器のタグパターンに札掛けしたとき、オペレータの操作を禁止するか許可するかを設定します。
0:許可 1:禁止
札掛け表示色 (COLR)
札掛けの表示色を登録します。リストから色名を選択します。 0:白 1:赤 2:緑 3:黄 4:青 5:紫 6:空 7:黒 8:薄灰青 9:暗橙 10:灰水 11:肌 12:明明灰 13:明灰 14:灰 15:濃濃灰 16:暗灰 17:灰青 18:灰紫 19:薄灰 20:濃灰 21:赤土 22:抹茶 23:枯草 24:藍 25:濃紫 26:灰緑 27:仄灰 28:薄緑 29:暗白 30:仄黄緑 31:仄濃灰
札掛け文字 (SIGN)
札掛け文字を登録します。 半角 16 文字(全角8文字)以内
警報監視方式 (ATYP)
警報の発報と確認の方式を選択します。 0:A 方式 1:B 方式 2:B1 方式 3:C 方式 4:C1 方式 5:D 方式 6:B2 方式
説明欄参照 0:A 方式 1:B 方式 を現在サポート
警報監視共通設定 (AMON)
計器の警報モニタリングを行う(ON)か否(OFF)かを選択します。
0:ON 1:OFF
制御スキャン設定 (PRS)
コントローラでの計器標準処理をどのスキャンで行うか選択します。高速スキャン、またはメインスキャン。
0:メイン 1:高速
サブスケジュール番号(SCH)
メインスキャン処理のとき、計器の標準処理を、負荷を分散するため実行周期をスケジュール化することができます。サブスケジュール番号が 0 のとき、メインスキャンごとに処理が行われます。N(>0)のとき、メインスキャンの N+1 回に 1 回だけ処理されます。
0~255
グルーピング番号 (GRP)
「サブスケジュール No.」で説明した、メインスキャンのN+1 回に 1 度の処理の内、何回目のメインスキャンで行うかを示す番号を登録します。N 回の処理の内、0~(N-1)までの番号でこれを示します。グルーピング番号が 1 以上のときは、それ未満の回数を設定してください。
0~254

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 225
項 目 説 明 設定値 備 考
割込制御レジスタ設定(SFRP)
操作量(MV)が変化したとき、TIF ステーションに割込み伝送を行う(有り)か否(無し)かを選択します。
0:無し 1:有り
警報監視個別設定 (MON)
「警報監視共通設定」が ON のとき、警報点ごとのモニタリングを行う(ON)か否(OFF)かを選択します。
0:ON 1:OFF
警報グレード種別 (AGRD)
警報のグレードを警報点ごとに選択します。 0:なし 1:注意報 2:軽警報 3:中警報 4:重警報
説明欄参照
指示計 PV 番号 (PVP)
弁開度を表示するプロセス信号 PV の番号を設定します。「出力信号種別」がパルスのとき、アクチュエータの位置や弁の開度を知るために、MV バーグラフに、MV の代わりに、フィードバックした PV 値を表示することができます。
0~1024
弁開度 PV 番号(VP)
弁開度を表示するプロセス信号 PV の番号を設定します。「出力信号種別」がパルスのとき、アクチュエータの位置や弁の開度を知るために、MV バーグラフに、MV の代わりに、フィードバックした PV 値を表示することができます。
0~1024
MV 出力方向設定 (MDR)
アナログ出力のとき、操作量 MV に対するアナログ出力の方向を選択します。 「0-100%で 4-20mA 出力」、または「0-100%で 20-4mA出力」です。 (参考) パルス入力のとき、この出力方向は次のようになります。「0-100%で 4-20mA 出力」のとき、ΔMV が正で、Openパルス出力です。 「0-100%で 20-4mA 出力」のとき、ΔMV が負で、Closeパルス出力です。 0:0-100%で 4-20mA 出力 1:0-100%で 20-4mA 出力
説明欄参照
制御演算方向設定 (CDR)
PID 調節計またはサンプル PI 調節計の偏差に対する操作量MV の演算方向を選択します。「偏差(SV-PV)増で MV増」、または「偏差(SV-PV)増で MV 減」のいずれかです。 0:SV-PV 増で MV 増 1:SV-PV 増で MV 減
説明欄参照
MV 表示方向設定 (MDSP)
MV バーグラフの表示方向の基点を選択します。0 で左側が基点になり、1 で右側が基点になります。
0:0~100% 1:100~0%
MV 開閉文字 (VCHR)
MV バーグラフの 0-100(100-0)の基準点に表示する文字を選択します。 0:C-O 1:O-C 2:C-C 3:O-O 4:S-O 5:O-S6:S-S
説明欄参照
MV スプリットレンジ位置(MSPL)
MV バーグラフがスプリットレンジのとき、その基点の任意を設定します。
ML~MH
MV 置き針位置 (MVPT)
MV バーグラフ上に置かれる、運転指針の位置を設定します。
ML~MH
出力信号種別 (MSIG)
出力信号の種類を選択します。 未使用 :この計器の標準処理は一切行われません。 実出力なし :MV 値の実出力処理は行いません。カスケードのマスターループの様に、実出力を行わないときに選択します。 4-20mA :実出力信号は、4-20mA です。 パルス幅低速 :実出力信号は、低速のパルス幅出力です。パルス幅高速 :実出力信号は、高速のパルス幅出力です。パルス列低速 :実出力信号は、低速のパルス列出力です。パルス列高速 :実出力信号は、高速のパルス列出力です。
説明欄参照 -

第 4 章 Tag の登録
6E8C4890 226
項 目 説 明 設定値 備 考
I/O モジュール種別 (MIOM)
PI/O モジュールの種別を選択します。 0:パラレル 1:インテリジェントシリアル 2:シリアル3:SSIF 4:F シリーズ 5:TC-netI/O 6:LP900 シリーズ゙ “インテリジェントシリアル“、“SSIF“、“Fシリーズ“、”TC-net I/O“を選択し、MV 異常(MVE)の検出が必要な場合、出力点バス/ユニット/スロット/ポイント番号を設定してください。
説明欄参照 2:シリアルは、将来用。
シミュレーション方式(SIMM)
本項目は、設定不要です。 (PV:指示計の SIMM を設定してください。)
nv シリーズの場合、I/O ノード番号を設定します。 TC-net I/O: 3~26 インテリジェントシリアル: 31~34
nv シリーズ用
出力点バス番号/ノード番号 (MBNO)
V シリーズの場合、プロセス信号の出力点のバス番号を設定します。
Note: 下記条件が全て成立する場合、出力点バス/ユニット/スロット/ポイント番号を設定して下さい。
(1) I/O モジュール種別:MIOM=「イテリジェントシリアル」「SSIF」「F シリーズ」
(2) 「MV 異常:MVE」または「制御モードが M の時の MV リードバック処理」必要 MVE:インテリジェント I/O(AO モジュール)が DU(カードダウン)で発生する警報
MV リードバック:インテリジェント I/O(AO モジュール)リードバックカウントを MV にセットする処理
(3) タグ種別:TYPE=「PID」「SPI」「M/A」「TPI」(4) 出力信号種別:MSIG=「4―20mA」
V シリーズ用
出力点ユニット番号(MUNO)
プロセス信号の出力点のユニット番号を設定します。
出力点スロット番号(MSNO)
プロセス信号の出力点のスロット番号を設定します。
出力点ポイント番号(MPNO)
プロセス信号の出力点のポイント番号を設定します。
メインスロット番号(MCNO)
メインモジュールのスロット番号を設定します。 nv シリーズ専用
出力点変数名 (MVA)
プロセス信号の出力点(アナログ出力点)の変数名を直接表記変数で設定します。 ・V シリーズの場合: %MW11.{IQNo.} ・nv シリーズの場合: %MW14.{I/O ループアドレス}(注意)nv シリーズの場合、重複出力になるため、同じアナログ出力点の I/O ワード No.に I/O 変数を登録しないでください。
説明欄参照
MV 変化率制限値 (DMV)
MV の変化率制限値を設定します。 0~999999999
MV 上限制限値 (MH)
MV の上限制限値を設定します。 ML<MH≦999999999
説明欄参照
MV 下限制限値 (ML)
MV の下限制限値を設定します。 -999999999≦ML<MH
説明欄参照
MV 上限警報値 (MHA)
MV の上限警報値を設定します。 MLA<MHA≦999999999
説明欄参照
MV 下限警報値 (MLA)
MV の下限警報値を設定します。 -999999999≦MLA<MHA
説明欄参照
MV 警報不感帯 (MVB)
MV の上下限警報値の不感帯を設定します。 0~999999999

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 227
項 目 説 明 設定値 備 考
制御停止定義(CLD)
PID 調節計またはサンプル PI 調節計の制御停止(CLI)の判定の仕方を選択します。 SV/PV 異常で CLI および M モード降格_(0): PV または SV の値が異常(PRE)のとき、CLI=ON として自動的に制御演算を停止します。 異常処理指定なし(1): 自動的に CLI=ON としません。制御停止の条件はユーザのプログラムに依存します。
説明欄参照
制御モード設定 (CMD)
OIS-DS のタグ制御モード変更の操作禁止条件を選択します。 許可、C モード禁止、A モード禁止、M モード禁止、C/Aモード禁止、C/M モード禁止、A/M モード禁止
説明欄参照
A モード時 SV設定 (SVS)
調節計の制御モードが A モードのとき、SV 値を設定できるかどうかを選択します。
0:許可 1:禁止
制御周期(DT) 制御演算の周期を秒単位で設定します。 0~32767
サンプル時間(T0)
サンプル PI 調節計のサンプル時間を 0.1s 単位で設定します。
0~32767
制御時間(T1) サンプル PI 調節計の制御時間を 0.1s 単位で設定します。 0~32767
比例ゲイン(KP)
PID 演算の比率ゲインを設定します。 0~1000 単位は倍
積分時間(TI) PID 演算の積分時間を分単位で設定します。 0~1000
微分時間(TD) PID 演算の微分時間を分単位で設定します。 0~1000
微分係数(ETA)
不完全微分のゲイン(1η)のηを設定します。 0 <= ETA <= 1
実 数
2 自由度比例系数 (ALP)
2 自由度比例係数(α)を設定します。 0~1 実 数
2 自由度積分系数 (BET)
2 自由度積分係数(β)を設定します。 0 <= BET < 2
実 数
2 自由度微分系数 (GAM)
2 自由度微分係数(γ)を設定します。 0 <= GAM < 2
実 数
偏差ギャップ幅 (GP)
PID、SPI 演算の偏差(SV-PV)のゲインを設定します。0近傍のギャップ幅以内では、ゲイン修飾することができます。
0~100 実 数 単位は%
偏差ギャップ内ゲイン(GG)
PID、SPI 演算の偏差(SV-PV)のゲインを設定します。0近傍のギャップ幅以内では、ゲイン修飾することができます。
0~1 実 数 単位は倍
比率ゲイン(GAIN)
比率設定器のゲインを設定します。 0~999999999
実 数
比率バイアス(BIAS)
比率設定器のバイアスを設定します。 -999999999 ~999999999
実 数
フルストローク時間/パルス数 (FP)
「出力信号種別」がパルスのとき、アクチュエータがフルストローク動作するのに必要なパルス数(パルス列)またはパルス時間(パルス幅)を設定します。
0~999999999
バックラッシュ (BL)
「出力信号種別」がパルスのとき、アクチュエータのバックラッシュを設定します。
0~255
ホールド時間(HT)
「出力信号種別」がパルスのとき、出力方向が逆転するときの保持時間(S)を設定します。
0~10 実 数
パルス不感帯(PLB)
「出力信号種別」がパルスのとき、微少パルスカウントに対する不要なアクチュエータ動作を止めるために、不感帯を設定します。
0~100 実 数
正偏差警報値(PDL)
正偏差に対する警報レベルを工学値で設定します。 0~999999999
実 数
負偏差警報値(NDL)
負偏差に対する警報レベルを工学値で設定します。 0~999999999

第 4 章 Tag の登録
6E8C4890 228
項 目 説 明 設定値 備 考
偏差警報不感帯 (DVB)
偏差警報に対する不感帯を工学値で設定します。 偏差警報の発報と回復の仕方 ABS( )を絶対値とすれば、 ABS(SV-PV)≧DL 成立で、偏差警報(DVE)発報します。 これ以後、 ABS(SV-PV)≦DL-DVB 成立で回復します。
0~999999999
実 数
比率レンジ上限値 (SH)
比率設定器の計器レンジの上限値を設定します。 SL<SH≦999999999
説明欄参照
比率レンジ下限値 (SL)
比率設定器の計器レンジの下限値を設定します。 -999999999≦SL<SH
説明欄参照
比率工学単位文字 (SVEU)
比率設定器の計器レンジの工学単位を設定します。 半角 16 文字(全角8文字)以内
比率演算値工学単位文字(MVEU)
比率設定器の MV 値の工業単位文字を設定します。 半角 16 文字(全角8文字)以内
比率少数点位置 (SVDM)
比率設定器の SV 値の小数点位置を設定します。 0~5
比率演算小数点位置 (MVDM)
比率設定器の MV 値の少数点位置を設定します。 0~5
△MV ゲイン(KF)
MV 変化を補正するための補正係数を設定します。 タグ種別(TYPE)=20:PID、21:SPI、24:TPI を選択した場合のみ、この設定は有効です。△MV バイアス(DFF)と組み合わせて、命令語(PID、SPI、TPI)内で次のように使用します。 ・命令語で演算した MV 変化=A とすると、(A×KF)+DFF を MV に対して加算します。 命令語の計算した MV 変化に対し、補正が不要である場合、KF=1、DFF=0 と設定します。
0~100
△MV バイアス (DFF)
MV 変化を補正するためのバイアス値を設定します。 タグ種別(TYPE)=20:PID、21:SPI、24:TPI を選択した場合のみ、この設定は有効です。△MV ゲイン(KF)と組み合わせて、命令語(PID、SPI、TPI)内で次のように使用します。 ・命令語で演算した MV 変化=A とすると、(A×KF)+DFF を MV に対して加算します。 命令語の計算した MV 変化に対し、補正が不要である場合、KF=1、DFF=0 と設定します。
-100~100
MV ランプ目標値 (MVP)
SMV 命令の目標値を設定します。 MV ランプ増分値(MVK)、MV ランプ時間係数(MVT)と組み合わせて、次のように使用します。 ・MV を目標値 MVP に向かって、(MVK/MVT)の傾きで漸近させます。
-999999999~999999999
MV ランプ増分値 (MVK)
SMV 命令の傾きを設定します。 MV ランプ目標値(MVP)、MV ランプ時間係数(MVT)と組み合わせて、次のように使用します。 ・MV を目標値 MVP に向かって、(MVK/MVT)の傾きで漸近させます。
0~999999999

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 229
項 目 説 明 設定値 備 考
MV ランプ時間係数 (MVT)
MVランプの時間単位を選択します。 MVランプ目標値(MVP)、MVランプ増分値(MVK)と組み合わせて、次のように使用します。 ・MV を目標値 MVP に向かって、(MVK/MVT)の傾きで漸近させます。 0:無し 1:秒 60:分 3600:時
説明欄参照
SV ランプ目標値 (SVP)
SSV 命令の目標値を設定します。 SV ランプ増分値(SVK)、SV ランプ時間係数(SVT)と組み合わせて、次のように使用します。 ・SV を目標値 SVP に向かって、(SVK/SVT)の傾きで漸近させます。
-999999999~999999999
SV ランプ増分値 (SVK)
SSV 命令の傾きを設定します。 SV ランプ目標値(SVP)、SV ランプ時間係数(SVT)と組み合わせて、次のように使用します。 ・SV を目標値 SVP に向かって、(SVK/SVT)の傾きで漸近させます。
0~999999999
SV ランプ時間係数 (SVT)
SVランプの時間単位を選択します。 SVランプ目標値(SVP)、SVランプ増分値(SVK)と組み合わせて、次のように使用します。 ・SV を目標値 SVP に向かって、(SVK/SVT)の傾きで漸近させます。 0:無し 1:秒 60:分 3600:時
説明欄参照
MV トラッキング値 (TR)
未使用です。 -999999999~999999999
出力機器名 (ACTS)
OIS で表示するための出力信号先の機器名を設定します。 半角 16 文字(全角8文字)以内
インチングパルス幅(POIP)
パルス出力時のインチング幅を設定します。 (注意) パルス幅(9ms、または 72ms)倍数を設定してください。倍数以外を設定した場合には、剰余分は切り捨てられます。但し、0~ 小パルス幅(9ms、または 72ms)の範囲を設定した場合は、 小パルス幅となります。
0~1500 単位は MS
SV メジャートラッキング指定 (FS0)
新計装 FB ライブラリ用のパラメータです。 SV のメジャートラッキングを行うか選択します。
0:しない 1:する
カスケード値 (FS1)
新計装 FB ライブラリ用のパラメータです。 カスケード値の単位を選択します。
0:% 1:工学単位
むだ時間[分] (MDT)
モデル駆動 PIDFB ライブラリ用のパラメータです。
PD 補償器ゲイン (MKF)
モデル駆動 PIDFB ライブラリ用のパラメータです。
PD 補償器微分時間[分] (MTF)
モデル駆動 PIDFB ライブラリ用のパラメータです。
MV 方向文字表示(VMHC)
計器上の MV データに表示される MV 方向文字を選択します。 タグ種別が“MH”のとき有効です。 0:左-右 1:上-下 2:前-後 3:正-逆
説明欄参照 nv シリーズ専用

第 4 章 Tag の登録
6E8C4890 230
■PB の意味 項 目 説 明 設定値 備 考
タグ番号(TAG)
計器に付けるタグ番号を設定します。これで計器を識別します。 ・使用できる文字は、半角の英字、数字、アンダーバー。・システム内で重複しないこと。 ・システムの予約語でないこと。なお、英字は、小文字、大文字を区別しません。すべて大文字に変換します。
半角 16 文字以内
タグ名称(NAME)
計器に付ける名称です。 途中にスペースを挿入して登録することによって、OIS での計器表示で半角 16 文字ずつ 2 段でセンタリング、右寄せ、左寄せで表示できるようになります。
半角 32 文字(全角16文字)以内
タグ種別(TYPE)
計器の機能種別を選択します。 タグ種別を未使用にすると、コントローラでは一切標準処理を行いません。 0:未使用 30:SOV 31:MTR 32:MOV 33:PB434:PB8 35:PB2
説明欄参照
表示パターンモデル番号(MDL)
OIS 上のタグパターンの番号です。0 は標準のタグパターンが使用されます。1~9 は、ユーザが作成した表示パターンが使用されます。
0~9
信号区分番号 (AREA)
システム全体で、計器信号をグループ化するために使用される番号です。この計器が属する番号を決めて登録します。
0~63
自動画面表示番号 (SCNO)
OIS では、計器が警報したとき、自動展開する画面をあらかじめ登録することができます。ここで、その画面の番号を設定します。0 は自動画面展開を行いません。
0~1024
操作禁止設定 (LOCK)
OIS で計器のタグパターンに札掛けしたとき、オペレータの操作を禁止するか許可するかを設定します。
0:許可 1:禁止
札掛け表示色 (COLR)
札掛けの表示色を登録します。リストから色名を選択します。 0:白 1:赤 2:緑 3:黄 :青 5:紫 6:空 7:黒8:薄灰青 9:暗橙 10:灰水 11:肌 12:明明灰 13:明灰 14:灰 15:濃濃灰 16:暗灰 17:灰青 18:灰紫 19:薄灰 20:濃灰 21:赤土 22:抹茶 23:枯草 24:藍 25:濃紫 26:灰緑 27:仄灰 28:薄緑 29:暗白 30:仄黄緑 31:仄濃灰
説明欄参照
札掛け文字(SIGN)
札掛け文字を登録します。 半角 16 文字(全角 8 文字)以内
警報監視方式 (ATYP)
警報の発報と確認の方式を選択します。 0:A 方式 1:B 方式 2:B1 方式 3:C 方式 4:C1 方式 5:D 方式 6:B2 方式
説明欄参照 0:A 方式 1:B 方式 を現在サポート
警報監視共通設定(AMON)
計器の警報モニタリングを行う(ON)か否(OFF)かを選択します。
0:ON 1:OFF
制御スキャン設定(PRS)
コントローラでの計器標準処理をどのスキャンで行うか選択します。高速スキャン、またはメインスキャン。
0:メイン 1:高速
サブスケジュール番号(SCH)
メインスキャン処理のとき、計器の標準処理を、負荷を分散するため実行周期をスケジュール化することができます。サブスケジュール番号が 0 のとき、メインスキャンごとに処理が行われます。N(>0)のとき、メインスキャンの N+1 回に 1 回だけ処理されます。
0~255

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 231
項 目 説 明 設定値 備 考
グルーピング番号(GRP)
「サブスケジュール No.」で説明した、メインスキャンのN+1 回に 1 度の処理の内、何回目のメインスキャンで行うかを示す番号を登録します。N 回の処理の内、0~(N-1)までの番号でこれを示します。グルーピング番号が 1 以上のときは、それ未満の回数を設定してください。
0~254
警報監視個別設定 (MON)
「警報監視共通設定」が ON のとき、警報点ごとのモニタリングを行う(ON)か否(OFF)かを選択します。
0:ON 1:OFF
警報グレード種別(AGRD)
警報のグレードを警報点ごとに選択します。 0:なし 1:注意報 2:軽警報 3:中警報 4:重警報
説明欄参照
入力信号動作記録設定(ARDI)
入力信号の変化を動作記録の項目に設定するかどうかを選択します。 0:なし 1:ON 時 2:OFF 時 3:ONOFF 時
説明欄参照
出力信号動作記録設定(ARDO)
出力信号の変化を動作記録の項目に設定するかどうかを選択します。 0:なし 1:ON 時 2:OFF 時 3:ONOFF 時
説明欄参照
FI 信号変化ブザー設定(BZFG)
入力信号の変化時にブザー音を出力するかどうかを選択します。 0:なし 1:ON 時 2:OFF 時 3:ONOFF 時
説明欄参照
警報検出設定(ADT)
警報を検出する(ON)、検出しない(OFF)を選択します。 0:OFF 1:ON
アンサバック監視タイマ設定値(FMT)
アンサバックを監視するための監視タイマを 0.1 秒単位で設定します。
0~32767
表示灯文字(SNAM)
表示灯に表示する文字を設定します。 半角 16 文字(全角 8 文字)以内
信号 ON 時表示色 (SCON)
表示灯の信号がON になったときに表示するランプの色を選択します。 0:白 1:赤 2:緑 3:黄 4:青 5:紫 6:空 7:黒8:薄灰青 9:暗橙 10:灰水 11:肌 12:明明灰 13:明灰 14:灰 15:濃濃灰 16:暗灰 17:灰青 18:灰紫 19:薄灰 20:濃灰 21:赤土 22:抹茶 23:枯草 24:藍 25:濃紫 26:灰緑 27:仄灰 28:薄緑 29:暗白 30:仄黄緑 31:仄濃灰
説明欄参照
信号 OFF 時表示色 (SCOF)
表示灯の信号が OFF になったときに表示するランプの色を選択します。 0:白 1:赤 2:緑 3:黄 4:青 5:紫 6:空 7:黒 8:薄灰青 9:暗橙 10:灰水 11:肌 12:明明灰 13:明灰 14:灰 15:濃濃灰 16:暗灰 17:灰青 18:灰紫 19:薄灰 20:濃灰 21:赤土 22:抹茶 23:枯草 24:藍 25:濃紫 26:灰緑 27:仄灰 28:薄緑 29:暗白 30:仄黄緑 31:仄濃灰
説明欄参照
ランプ表示設定 (LMP)
OIS 上のタグパターンにランプを表示するかどうかを選択します。
0:非表示 1:表示
ボタン表示設定 (PB)
OIS 上のタグパターンにボタンを表示するかどうかを選択します。
0:非表示 1:表示
入力反転設定 (INV)
ランプを点灯させるのに、入力点の信号を反転させるかどうかを選択します。
0:非反転 1:反転
出力反転設定(ONV)
出力テーブル処理後の値を出力点へ出力するのに、その信号を反転させるかどうかを選択します。
0:非反転 1:反転
入力点バス番号(IBNO*)
nv シリーズの場合、I/O ノード番号を設定します。 TC-net I/O: 3~26 インテリジェントシリアル: 31~34
nv シリーズ用

第 4 章 Tag の登録
6E8C4890 232
項 目 説 明 設定値 備 考
V シリーズの場合、プロセス信号の入力点のバス番号を設定します。 Note: 以下の条件が全て成立する場合、入力点バス/ユニ
ット/スロット/ポイント番号、および出力点バス/ユニット/スロット/ポイント番号を設定してください。 (1) I/O モジュール種別:DIOM=「インテリジェントシリアル」
「SSIF」「F シリーズ」 (2) 「I/O 異常:IOE」または「制御モード:MOD
=「M」の DO リードバック」が必要 IOE:インテリジェント I/O(DI,DO モジュール)が
DU(カードダウン)で発生する警報 DO リードバック:インテリジェント I/O(DO モジュール)
のリードバック DO を FO にセット
V シリーズ用
入力点ユニット番号(IUNO*)
プロセス信号の入力点のユニット番号を設定します。
入力点スロット番号(ISNO*)
プロセス信号の入力点のスロット番号を設定します。
入力点ポイント番号(IPNO*)
プロセス信号の入力点のポイント番号を設定します。
入力メインスロット番号(ICNO*)
メインモジュールのスロット番号を設定します。 nv シリーズ専用
出力点バス番号(OBNO*)
nv シリーズの場合、I/O ノード番号を設定します。 V シリーズの場合、プロセス信号の出力点のバス番号を設定します。
出力点ユニット番号(OUNO*)
プロセス信号の出力点のユニット番号を設定します。
出力点スロット番号(OSNO*)
プロセス信号の出力点のスロット番号を設定します。
出力点ポイント番号(OPNO*)
プロセス信号の出力点のポイント番号を設定します。
出力メインスロット番号(OCNO*)
メインモジュールのスロット番号を設定します。 nv シリーズ専用
入力点変数名(IA*)
プロセス信号の入力点(ディジタル入力点)の変数名を直接表記変数で設定します。 ・V シリーズの場合: %MX11.{IQNo.}.{ビット No.}・nv シリーズの場合: %MX14.{I/O ループアドレ
ス}.{ビット No.}
出力点変数名(OA*)
プロセス信号の出力点(ディジタル出力点)の変数名を直接表記変数で設定します。 ・ V シリーズの場合: %MX11.{IQNo.}.{ビット No.}・ nv シリーズの場合: %MX14.{I/O ループアドレ
ス}.{ビット No.} (注意)nv シリーズの場合、重複出力になるため、同じデ
ィジタル出力点を含む I/O ワード No.に I/O 変数を登録しないでください。
出力点 1~8 (ボタン押下時) (DA*D) *は 1~8
ボタン 1~ボタン 8 の押しボタンを押したとき、各点の出力に対する動作を選択します。 0:無処理 1:出力をセットする 2:出力をリセットする3:出力を反転する
説明欄参照

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 233
項 目 説 明 設定値 備 考
出力点 1~8 (ボタン戻り時) (DA*V) *は 1~8
押していたボタン 1~ボタン 8 の押しボタンを戻したとき、各点の出力に対する動作を選択します。 0:無処理 1:出力をセットする 2:出力をリセットする3:出力を反転する
説明欄参照
指示計 PV 番号(PVP)
指示計に表示するプロセス信号の PV 番号を設定します。 0~768 将来用
モード使用設定 (MODS)
OIS に制御モードを表示する(1)、表示しない(0)を選択します。 0:不使用 1:使用。 また、制御モード変更の操作禁止条件を選択します。
説明欄参照
複数ボタン同時設定(MSEL)
OIS からリモートオペレーションするとき、複数のボタンを同時に実行できるようにする(1)、しない(0)を選択します。
0:不可 1:可
I/O モジュール種別 (DIOM)
PI/O モジュールの種別を選択します。 0:パラレル 1:インテリジェントシリアル 2:シリアル 3:SSIF 4:F シリーズ 5:TC-net I/O 6:LP900 シリーズ
説明欄参照 2:シリアルは将来用
入力更新設定(FIUS)
入力信号(FI)の更新を標準処理で行うか否かを設定します。
標準 ユーザ
アンサバックアラーム指定(ASA1)
MOT,SOV,MOV タグにて、アンサーバックアラームを実行するかを設定します。
無し 有り
モーメンタリタイマ設定値(MTS)
MOT,SOV,MOV タグにて、モーメンタリ出力の強制終了までの時間を設定します。100ms 単位。OIS からの FO 出力要求(RFO=1)後、この設定時間だけ経過しても終了要求(RFO1=0)が無い場合、PCS にて強制的に RFO1=0 とします。
0~32767。 15(1.5 秒)以下は、15 として処理されます。
モーメンタリタイマ設定(MMS)
モーメンタリ処理を行うか否かを OIS のボタン毎に設定します。MOT,SOV,MOV タグにて使用する設定です。
未使用 使用

第 4 章 Tag の登録
6E8C4890 234
■SQ の意味 項 目 説 明 設定値 備 考
タグ番号(TAG)
計器に付けるタグ番号を設定します。これで計器を識別します。・使用できる文字は、半角の英字、数字、アンダーバー。・システム内で重複しないこと。 ・システムの予約語でないこと。なお、英字は、小文字、大
文字を区別しません。すべて大文字に変換します。
半角 16 文字以内
タグ名称(NAME)
計器に付ける名称です。 途中にスペースを挿入して登録することによって、OIS での計器表示で半角 16 文字ずつ 2 段でセンタリング、右寄せ、左寄せで表示できるようになります。
半角 32 文字(全角16文字)以内
タグ種別(TYPE)
計器の機能種別を選択します。 ・タグ種別を未使用にすると、コントローラでは一切標準処
理を行いません。
未使用/SEQ
表示パターンモデル番号(MDL)
OIS 上のタグパターンの番号です。0 は標準のタグパターンが使用されます。1~9 は、ユーザが作成した表示パターンが使用されます。
0~9
信号区分番号 (AREA)
システム全体で、計器信号をグループ化するために使用される番号です。この計器が属する番号を決めて登録します。
0~63
自動画面表示番号 (SCNO)
OIS では、計器が警報したとき、自動展開する画面をあらかじめ登録することができます。ここで、その画面の番号を設定します。0 は自動画面展開を行いません。
0~1024
操作禁止設定 (LOCK)
OIS で計器のタグパターンに札掛けしたとき、オペレータの操作を禁止するか許可するかを設定します。
禁止/許可
札掛け表示色 (COLR)
札掛けの表示色を登録します。リストから色名を選択します。 0:白 1:赤 2:緑 3:黄 4:青 5:紫 6:空 7:黒 8:薄灰青 9:暗橙 10:灰水 11:肌 12:明明灰 13:明灰 14:灰 15:濃濃灰 16:暗灰 17:灰青 18:灰紫 19:薄灰 20:濃灰 21:赤土 22:抹茶 23:枯草 24:藍 25:濃紫 26:灰緑 27:仄灰 28:薄緑 29:暗白 30:仄黄緑 31:仄濃灰
説明欄参照
札掛け文字(SIGN)
札掛け文字を登録します。 半角 32 文字(全角16文字)以内
警報監視方式 (ATYP)
警報の発報と確認の方式を選択します。 0:A 方式 1:B 方式 2:B1 方式 3:C 方式 4:C1 方式 5:D 方式 6:B2 方式
説明欄参照 0:A 方式1:B 方式 を現在サポート
警報監視共通設定(AMON)
計器の警報モニタリングを行う(ON)か否(OFF)かを選択します。
ON/OFF
警報監視個別設定 (MON)
「警報監視共通設定」が ON のとき、警報点ごとのモニタリングを行う(ON)か否(OFF)かを選択します。
0:ON 1:OFF
警報グレード種別 (AGRD)
警報のグレードを警報点ごとに選択します。 0:なし 1:注意報 2:軽警報 3:中警報 4:重警報
説明欄参照
フェーズ名(PNAM)
シーケンス操作に含まれる工程名を設定します。 半角 24 文字(全角 12 文字)以内
連動/単独選択(FA)
各フェーズごとに、シーケンスを停止させる(単独)かを設定します。
単独/連動
確認進行設定(CNFM)
進行の確認をするかを設定します(未使用)。 OFF/ON
制御モード設定(CMD)
OIS-DS でのタグの制御モード変更の、操作禁止条件を選択します。 許可、C モード禁止、A モード禁止、M モード禁止、C/Aモード禁止、C/M モード禁止、A/M モード禁止
説明欄参照

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 235
■TC の意味 項 目 説 明 設定値 備 考
タグ番号(TAG)
計器に付けるタグ番号を設定します。これで計器を識別します。 ・使用できる文字は、半角の英字、数字、アンダーバー。・システム内で重複しないこと。 ・システムの予約語でないこと。なお、英字は、小文字、
大文字を区別しません。すべて大文字に変換します。
半角 16 文字以内
タグ名称(NAME)
計器に付ける名称です。 途中にスペースを挿入して登録することによって、OIS での計器表示で半角 16 文字ずつ 2 段でセンタリング、右寄せ、左寄せで表示できるようになります。
半角 32 文字(全角16文字)以内
タグ種別(TYPE)
計器の機能種別を選択します。 タグ種別を未使用にすると、コントローラでは一切標準処理を行いません。
未使用/TIM/CNT
表示パターンモデル番号(MDL)
OIS 上のタグパターンの番号です。0 は標準のタグパターンが使用されます。1~9 は、ユーザが作成した表示パターンが使用されます。
0~9
信号区分番号 (AREA)
システム全体で、計器信号をグループ化するために使用される番号です。この計器が属する番号を決めて登録します。
0~63
自動画面表示番号 (SCNO)
OIS では、計器が警報したとき、自動展開する画面をあらかじめ登録することができます。ここで、その画面の番号を設定します。0 は自動画面展開を行いません。
0~1024
操作禁止設定 (LOCK)
OIS で計器のタグパターンに札掛けしたとき、オペレータの操作を禁止するか許可するかを設定します。
禁止/許可
札掛け表示色 (COLR)
札掛けの表示色を登録します。リストから色名を選択します。 0:白 1:赤 2:緑 3:黄 4:青 5:紫 6:空 7:黒 8:薄灰青 9:暗橙 10:灰水 11:肌 12:明明灰13:明灰 14:灰 15:濃濃灰 16:暗灰 17:灰青 18:灰紫 19:薄灰 20:濃灰 21:赤土 22:抹茶 23:枯草 24:藍 25:濃紫 26:灰緑 27:仄灰 28:薄緑 29:暗白 30:仄黄緑 31:仄濃灰
説明欄参照
札掛け文字(SIGN)
札掛け文字を登録します。 半角 16 文字(全角8文字)以内
警報監視方式 (ATYP)
警報の発報と確認の方式を選択します。 0:A 方式 1:B 方式 2:B1 方式 3:C 方式 4:C1 方式 5:D 方式 6:B2 方式
説明欄参照 0:A 方式 1:B 方式 を現在サポート
警報監視共通設定 (AMON)
計器の警報モニタリングを行う(ON)か否(OFF)かを選択します。
ON/OFF
制御スキャン設定 (PRS)
コントローラでの計器標準処理をどのスキャンで行うか選択します。高速スキャン、またはメインスキャン。
サブスケジュール番号(SCH)
メインスキャン処理のとき、計器の標準処理を、負荷を分散するため実行周期をスケジュール化することができます。サブスケジュール番号が 0 のとき、メインスキャンごとに処理が行われます。N(>0)のとき、メインスキャンの N+1 回に 1 回だけ処理されます。
0~255
グルーピング番号 (GRP)
「サブスケジュール No.」で説明した、メインスキャンのN+1 回に 1 度の処理の内、何回目のメインスキャンで行うかを示す番号を登録します。N 回の処理の内、0~(N-1)までの番号でこれを示します。グルーピング番号が 1 以上のときは、それ未満の回数を設定してください。
0~255

第 4 章 Tag の登録
6E8C4890 236
項 目 説 明 設定値 備 考
警報監視個別設定 (MON)
「警報監視共通設定」が ON のとき、警報点ごとのモニタリングを行う(ON)か否(OFF)かを選択します。
0:ON 1:OFF
警報グレード種別 (AGRD)
警報のグレードを警報点ごとに選択します。 0:なし 1:注意報 2:軽警報 3:中警報 4:注意報
説明欄参照
工業単位文字(EU)
プロセス値 PV の工業単位文字を設定します。 半角 16 文字(全角8文字)以内
時間単位(TMEV)
計器種別が時間計のとき、PV は経過時間を示します。この単位を選択します。コントローラの標準処理は、このコードを見て、経過時間を計算します。
秒/分/時/日
小数点位置(DCML)
計器上に PV 値やレンジを表示するときの、小数点以下の桁を指定します。
0~5
レンジ上限値(MAX)
上限レンジです。また、時間計やカウンタの PV 値はこの値を超えると自動的に山越し処理をして、ロータリ積算を繰り返します。
0<MAX≦999999999
レンジ下限値(MIN)
下限レンジです。カウンタの PV 値はこの値を下回ると自動的に負の山越し処理をして、ロータリ積算を繰り返します。
-99999999~0

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 237
■DB の意味 項 目 説 明 設定値 備 考
タグ番号(TAG)
計器に付けるタグ番号を設定します。これで計器を識別します。 ・使用できる文字は、半角の英字、数字、アンダーバー。・システム内で重複しないこと。 ・システムの予約語でないこと。なお、英字は、小文字、大文字を区別しません。すべて大文字に変換します。
半角 16 文字以内
タグ名称(NAME)
計器に付ける名称です。 途中にスペースを挿入して登録することによって、OIS での計器表示で半角 16 文字ずつ 2 段でセンタリング、右寄せ、左寄せで表示できるようになります。
半角 32 文字(全角16文字)以内
タグ種別(TYPE)
計器の機能種別を選択します。 タグ種別を未使用にすると、コントローラでは一切標準処理を行いません。 0:未使用 60:DB1 61:DB8
説明欄参照
表示パターンモデル番号(MDL)
OIS 上のタグパターンの番号です。0 は標準のタグパターンが使用されます。1~9 は、ユーザが作成した表示パターンが使用されます。
0~9
信号区分番号 (AREA)
システム全体で、計器信号をグループ化するために使用される番号です。この計器が属する番号を決めて登録します。
0~63
自動画面表示番号 (SCNO)
OIS では、計器が警報したとき、自動展開する画面をあらかじめ登録することができます。ここで、その画面の番号を設定します。0 は自動画面展開を行いません。
0~1024
操作禁止設定 (LOCK)
OIS で計器のタグパターンに札掛けしたとき、オペレータの操作を禁止するか許可するかを設定します。
禁止/許可
札掛け表示色 (COLR)
札掛けの表示色を登録します。リストの色名を選択します。0:白 1:赤 2:緑 3:黄 4:青 5:紫 6:空 7:黒 8:薄灰青 9:暗橙 10:灰水 11:肌 12:明明灰13:明灰 14:灰 15:濃濃灰 16:暗灰 17:灰青 18:灰紫 19:薄灰 20:濃灰 21:赤土 22:抹茶 23:枯草 24:藍 25:濃紫 26:灰緑 27:仄灰 28:薄緑 29:暗白 30:仄黄緑 31:仄濃灰
説明欄参照
札掛け文字(SIGN)
札掛け文字を登録します。 半角 16 文字(全角 8 文字)以内
設定値(実数) (R)
8 点の実数型設定値の初期値を設定します。 RL~RH
設定値(長整数) (D)
8 点の長整数型設定値の初期値を設定します。 DL~DH
設定値(整数) (W)
8 点の整数型設定値の初期値を設定します。 WL~WH
設定値上限 (実数)(RH)
8 点の実数型設定値の上限値を設定します。 RL~9999999
設定値上限 (長整数)(DH)
8 点の長整数型設定値の上限値を設定します。 DL~9999999
設定値上限(整数)(WH)
8 点の整数型設定値の上限値を設定します。 WL~32767
設定値下限 (実数)(RL)
8 点の実数型設定値の下限値を設定します。 -999999~RH
設定値下限 (長整数)(EL)
8 点の長整数型設定値の下限値を設定します。 -999999~DH

第 4 章 Tag の登録
6E8C4890 238
項 目 説 明 設定値 備 考
設定値下限 (整数)(WL)
8 点の整数型設定値の下限値を設定します。 -999999~WH
設定値データ型 (DTYP)
8 点の設定値のデータ型を個別に選択します。 0:未使用 8:整数 12:長整数 16:実数
説明欄参照
小数点位置(DCML)
計器上に値を表示するときの、小数点以下の桁を指定します。
0~5
工業単位文字(EU)
設定値の工業単位文字を設定します。 半角 16 文字(全角 8 文字)以内
■R の意味 項 目 説 明 設定値 備 考
実数値 実数パラメータの数値を設定します。
コメント 実数パラメータに対するコメントを設定します。 全角 18 文字(半角 36 文字)以内
工業単位 実数パラメータの数値を設定します。 半角 16 文字(全角 8 文字)以内
■W の意味 項 目 説 明 設定値 備 考
実数値 整数パラメータの数値またはビット列を設定します。
ビットコメント ビット列に対するコメントを設定します。 全角 18 文字(半角 36 文字)以内
コメント 整数パラメータに対するコメントを設定します。 全角 18 文字(半角 36 文字)以内
工業単位 整数パラメータの単位を設定します。 半角 16 文字(全角8文字)以内

4.2 Tag パラメータの意味
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 239
■T の意味 項 目 説 明 設定値 備 考
設定値 タイマの設定値を設定します。
コメント タイマに対するコメントを設定します。 全角 18 文字(半角 36 文字)以内
工業単位 タイマの工業単位「0.1[sec]」または「0.1[min]」が表示されます。
- #T1~#T256: 0.1[sec] #T257~#T512:0.1[min]
入力条件 タイマの入力条件式を設定します。 半角18 文字以内
現在値 タイマの現在値が表示されます。 - オンライン時に表示
スタート タイマがスタートしたとき「-1」が表示されます。 - オンライン時に表示
ストップ タイマがストップしたとき「-1」が表示されます。 - オンライン時に表示
リセット タイマの現在値をリセットしたとき、「-1」が表示されます。 - オンライン時に表示
アップ タイマの現在値が設定値以上になったとき「-1」が表示されます。
- オンライン時に表示
■C の意味 項 目 説 明 設定値 備 考
設定値 カウンタの設定値を設定します。
コメント カウンタに対するコメントを設定します。 全角 18 文字(半角 36 文字)以内
工業単位 カウンタの工業単位「count」が表示されます。 -
入力条件 カウンタの入力条件式を設定します。 半角18 文字以内
現在値 カウンタの現在値が表示されます。 - オンライン時に表示
インクリメント カウンタの現在値が増加したとき「-1」が表示されます。 - オンライン時に表示
デクリメント カウンタの現在値が減少したとき「-1」が表示されます。 - オンライン時に表示
リセット カウンタの現在値をリセットしたとき、「-1」が表示されます。
- オンライン時に表示
アップ カウンタの現在値が設定値以上になったとき「-1」が表示されます。
- オンライン時に表示
ダウン カウンタの現在値が設定値の絶対値にマイナス符号をつけた値以下になったとき「-1」が表示されます。
- オンライン時に表示

第 4 章 Tag の登録
6E8C4890 240
■P の意味 項 目 説 明 設定値 備 考
X1~X11 X 座標の 1~11 を増加方向に設定します。 0≦Xi-1<Xi エンドコード=-0
i=2~11 単精度実数
Y1~Y11 Y 座標の 1~11 を設定します。 エンドコード=-0 単精度実数
単位(X) X 値の単位を設定します。 半角 16 文字(全角8文字)以内
単位(Y) Y 値の単位を設定します。 半角 16 文字(全角8文字)以内
コメント 折れ線テーブルのコメントを設定します。 全角 18 文字(半角 36 文字)以内
■RTT の意味 項 目 説 明 設定値 備 考
ONS 論理名(LOGN)
論理名を登録します。 半角 16 文字以内
ONS アトム名(ATMN)
アトム名称を登録します。 半角 4 文字以内
データタイプ (DTYP)
データタイプを選択します。 D_NOTYPE,D_BIT,D_BITS,D_BYTE,D_BYTES,D_U_BYTE D_U_BYTES,D_SHORT,D_SHORTS,D_U_SHORT,D_U_SHORTS D_LONG,D_LONGS,D_U_LONG,D_U_LONGS,D_FLOAT,D_FLOATS
説明欄参照
アトム配列数(ATYP)
アトム配列の総数を登録します。 0:無し 1 以上 :配列総数
アトム配列位置 (ARYN)
アトム配列の位置を登録します。 0~65535
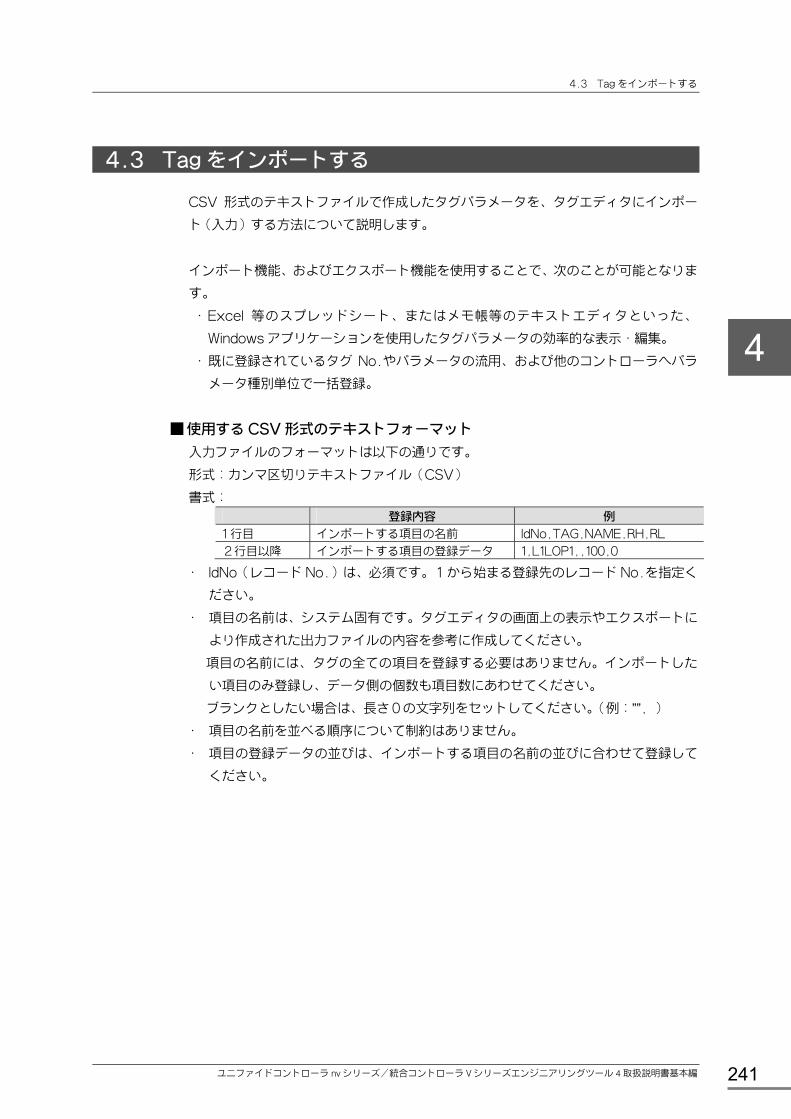
4.3 Tag をインポートする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 241
4.3 Tag をインポートする
CSV 形式のテキストファイルで作成したタグパラメータを、タグエディタにインポー
ト(入力)する方法について説明します。
インポート機能、およびエクスポート機能を使用することで、次のことが可能となりま
す。
・ Excel 等のスプレッドシート、またはメモ帳等のテキストエディタといった、
Windows アプリケーションを使用したタグパラメータの効率的な表示・編集。
・ 既に登録されているタグ No.やパラメータの流用、および他のコントローラへパラ
メータ種別単位で一括登録。
■ 使用する CSV 形式のテキストフォーマット
入力ファイルのフォーマットは以下の通りです。
形式:カンマ区切りテキストファイル(CSV)
書式:
登録内容 例
1 行目 インポートする項目の名前 IdNo,TAG,NAME,RH,RL
2行目以降 インポートする項目の登録データ 1,L1LOP1,,100,0
・ IdNo(レコード No.)は、必須です。1から始まる登録先のレコード No.を指定く
ださい。
・ 項目の名前は、システム固有です。タグエディタの画面上の表示やエクスポートに
より作成された出力ファイルの内容を参考に作成してください。
項目の名前には、タグの全ての項目を登録する必要はありません。インポートした
い項目のみ登録し、データ側の個数も項目数にあわせてください。
ブランクとしたい場合は、長さ0の文字列をセットしてください。(例:””, )
・ 項目の名前を並べる順序について制約はありません。
・ 項目の登録データの並びは、インポートする項目の名前の並びに合わせて登録して
ください。
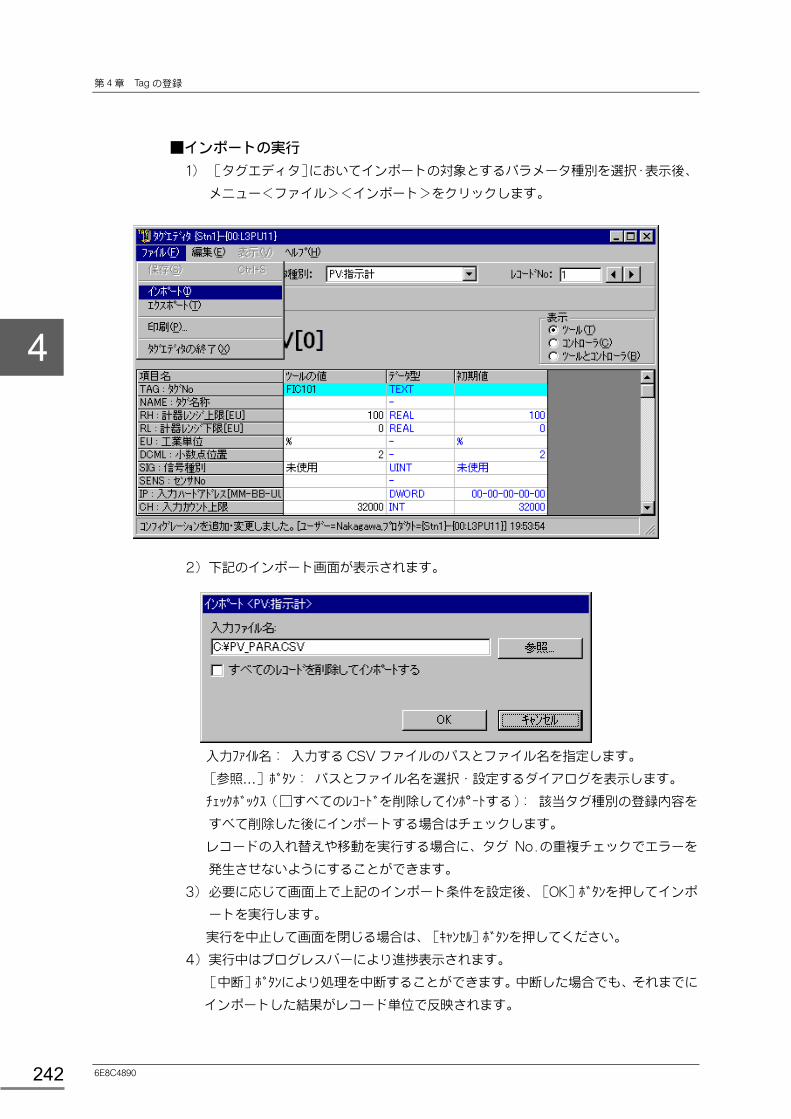
第 4 章 Tag の登録
6E8C4890 242
■インポートの実行
1) [タグエディタ]においてインポートの対象とするパラメータ種別を選択・表示後、
メニュー<ファイル><インポート>をクリックします。
2) 下記のインポート画面が表示されます。
入力ファイル名: 入力する CSV ファイルのパスとファイル名を指定します。
[参照…]ボタン: パスとファイル名を選択・設定するダイアログを表示します。
チェックボックス(□すべてのレコードを削除してインポートする): 該当タグ種別の登録内容を
すべて削除した後にインポートする場合はチェックします。
レコードの入れ替えや移動を実行する場合に、タグ No.の重複チェックでエラーを
発生させないようにすることができます。
3) 必要に応じて画面上で上記のインポート条件を設定後、[OK]ボタンを押してインポ
ートを実行します。
実行を中止して画面を閉じる場合は、[キャンセル]ボタンを押してください。
4) 実行中はプログレスバーにより進捗表示されます。
[中断]ボタンにより処理を中断することができます。中断した場合でも、それまでに
インポートした結果がレコード単位で反映されます。

4.3 Tag をインポートする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 243
■ エラーログ
エラーが発生した場合、その内容をエラーログに出力します。
・フォーマット
[エラーの起きた IdNo]、[項目名]([エラーコード])、[項目名]([エラーコード])、・・・
例:
1, TAG(12)
2, NAME(24), RH(21), …
0, IdNo(20)
・IdNo が特定できない行では、IdNo は 0 として出力されます。
・エラーコード エラーコード エラーの内容
10 IdNo が指定されていません。
11 指定された項目(フィールド)はインポートできません。
12 タグ No.が不正、または重複エラーです。
20 指定されたデータは、数値ではありません。
21 指定された数値は、設定できません(範囲外)。
22 指定された数値は、設定できません(選択候補外)。 23 指定された文字は、設定できません(選択候補外)。 24 指定された文字は、設定できません(長さ制限外)。

第 4 章 Tag の登録
6E8C4890 244
4.4 Tag をエクスポートする
タグエディタを使って登録したタグ No.やパラメータを、CSV 形式のテキストファ
イルにエクスポート(出力)する方法について説明します。
インポート機能、およびエクスポート機能を使用することで、次のことが可能となり
ます。
Excel 等のスプレッドシート、またはメモ帳等のテキストエディタといった、
Windows アプリケーションを使用したタグパラメータの効率的な表示・編集。
既に登録されているタグ No.やパラメータの流用、および他のコントローラへパラメ
ータ種別単位で一括登録。
■エクスポートの実行
1) [タグエディタ]においてエクスポートの対象とするパラメータ種別を選択・表示
後、メニュー<ファイル><エクスポート>をクリックします。
2) 下記のエクスポート画面が表示されます。
出力ファイル名: 出力する CSV ファイルのパスとファイル名を指定します。
[参照…]ボタン: パスとファイル名を選択・設定するダイアログを表示します。
レコード No.: 出力するレコード範囲を指定します。

4.4 Tag をイクスポートする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 245
3) 必要に応じて画面上で上記のエクスポート条件を設定後、[OK]ボタンを押してエク
スポートを実行します。
実行を中止して画面を閉じる場合は、[キャンセル]ボタンを押してください。
4) 実行中はプログレスバーにより進捗表示されます。
[中断]ボタンにより処理を中断することができます。中断した場合でも、それまで
にエクスポートした結果はレコード単位でファイルに出力されます。
●重要
・データの列数(項目数)の制限について
CSV 形式のデータの列数(項目数)は、仕様上255列に制限されています。よって項目数が
それより多いタグでは、自動的にファイルを2つに分割して出力します。(2つめのファイル名
に、“(2)”を付加する。)
・該当タグ: DS 型の PB タグ
・出力ファイル例: PB_PARA.CSV と PB_PARA(2).CSV
2つめのファイルと同一名のファイルが存在する場合には、該当ファイルが削除されますので、
ご注意ください。
また、該当タグの出力ファイルを編集して再インポートする場合には、ファイルをマージ(結合)
後にインポートするか、2回に分けてインポートする必要があります。
なお、エクスポートの行数(レコード数)、およびインポート時の行数と列数には制限はありま
せん。
■出力される CSV 形式のテキストフォーマット
出力ファイルのフォーマットは以下の通りです。
形式:カンマ区切りテキストファイル(CSV)
書式:
出力内容 例
1 行目 全ての項目の名前 IdNo,TAG,NAME,RH,RL,EU…LOG,PICT,SIMM
2行目以降 全ての項目の登録データ 1,L1LOP1,,100,0,%・・・1,,0
DS 型の PB タグにおいて分割されたファイルのうち、2つめのファイルでは、1列目
と2列目に、それぞれ IdNo(レコード No.)と TAG(タグ No.)が自動的に付加され
ます。

第 4 章 Tag の登録
6E8C4890 246

247
第 5 章 制御プログラムの作成 ここでは、「プログラムエディタ」で制御プログラムを作成するときの操作を説明します。
以下では、次の内容を説明します。
5.1 プログラムエディタの種別 ·························································249
5.2 セミグラフィック ········································································250
5.2.1 プログラムエディタの構成············································251
5.2.2 タスクを開く··································································253
5.2.3 プログラムを描画する ···················································258
5.2.4 変数を入力する ······························································263
5.2.5 変数を宣言する ······························································265
5.2.6 ファンクションを使う ···················································269
5.2.7 ファンクションブロックを使う ····································272
5.2.8 変数や命令語を検索・置換する ····································274
5.2.9 さまざまな編集・表示機能············································278
5.2.10 タスクを保存する ··························································281
5.2.11 変数コメント命令語の実行順序を表示する ··················282
5.2.12 クロスリファレンスを利用する ····································284
5.2.13 デバイス変数プロパティ ···············································286
5.3 テキスト·······················································································289
5.3.1 プログラムエディタの構成············································290
5.3.2 タスクを開く··································································291
5.3.3 プログラムを記述する ···················································293
5.3.4 変数を入力する ······························································295

第 5 章 制御プログラムの作成
6E8C4890 248
5.3.5 変数を宣言する ······························································296
5.3.6 ファンクションを使う ···················································297
5.3.7 ファンクションブロックを使う ····································298
5.3.8 変数を検索・置換する ···················································299
5.3.9 タスクを保存する ··························································300
5.3.10 クロスリファレンスを利用する ····································304
5.3.11 デバイス変数プロパティ ···············································306
5.4 フルグラフィック ········································································308
5.4.1 プログラムエディタの構成············································309
5.4.2 タスクを開く·································································· 311
5.4.3 プログラムを描画する ···················································316
5.4.4 変数を入力する ······························································327
5.4.5 変数を宣言する ······························································328
5.4.6 ファンクションを使う ···················································332
5.4.7 ファンクションブロックを使う ····································336
5.4.8 変数や命令語を検索・置換する ····································338
5.4.9 さまざまな編集・表示機能············································342
5.4.10 タスクを保存する ··························································347
5.4.11 データ型命令語の実行順序を表示する ·························348
5.4.12 クロスリファレンスを利用する ····································350
5.4.13 デバイス変数プロパティ ···············································352
5.4.14 不定型ファンクション命令を利用する ·························354
5.4.15 命令語の実行順序を変更する ········································364
5.4.16 タブ機能を利用する·······················································367
5.5 ユーザファンクションを作る······················································369
5.6 ユーザファンクションブロックを作る ·······································372
5.7 Tag シンボルを使う····································································375
5.8 プログラムを再利用する ·····························································376
5.9 システムを一括してコンパイルする···········································378
5.10 コントローラを一括してコンパイルする ···································380
5.11 変更時の影響箇所を検索する······················································382
5.12 プログラムにセキュリティを設定する ·······································385
5.13 変数名の重複を検索する ·····························································388
5.14 変数アドレスの重複を検索する ··················································391
5.15 変数の重複出力をチェックする ··················································394
5.16 変数の入出力をチェックする······················································397
5.17 カスタムシンボルを使う ·····························································401
5.18 カスタムシンボルを作成する······················································405
5.19 プログラムで利用されていない変数を検索する ························414

5.1 プログラムエディタの種別
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 249
5.1 プログラムエディタの種別
■ プログラムエディタの種別
nv シリーズおよび、V シリーズのプログラミング言語(LD,FBD,SFC,ST)を使用し
てプログラム、ファンクションまたは、ファンクションブロックを作成するには、以下
のプログラムエディタを使用します。
プログラムエディタの種別 プログラミング言語
セミグラフィック LD,FBD,SFC
フルグラフィック LD,FBD,SFC
テキスト ST
■ プログラムエディタの相互呼び出し
各種プログラムエディタ(セミグラフィック、テキスト、フルグラフィック)で作成し
たプログラムから、同種別または、異なる種別のプログラムエディタで作成したファン
クションまたは、ファンクションブロックを呼び出すことができます。
例:セミグラフィックのプログラムから、テキストのファンクションブロックおよび、
フルグラフィックのファンクションを呼び出す場合
プログラムエディタ-セミグラフィック
XBLK
IN Q
CN
BLK_1
ファンクションブロック
XFUN
IN
TBL
プログラムエディタ-テキスト
ファンクション
プログラムエディタ-フルグラフィック
プログラムXO:=XOUT;XU:=IN;XOUT:=B[0]*CN;
IF RUN THEN Q:=XOUT+XU;END_IF;
YFUN +
IN

第 5 章 制御プログラムの作成
6E8C4890 250
5.2 セミグラフィック
ここでは、「プログラムエディタ(セミグラフィック)」で LD(ラダーダイヤグラム)
/FBD(ファンクションブロックダイヤグラム)/SFC(シーケンシャルファンクションチャ
ート)の制御プログラムを作成するときの操作を説明します。以下では、次の内容を説
明します。
5.2.1 プログラムエディタの構成
5.2.2 タスクを開く
5.2.3 プログラムを描画する
5.2.4 変数を入力する
5.2.5 変数を宣言する
5.2.6 ファンクションを使う
5.2.7 ファンクションブロックを使う
5.2.8 変数や命令語を検索置換する
5.2.9 さまざまな編集および表示機能
5.2.10 タスクを保存する
5.2.11 変数コメント命令語の実行順序を表示する
5.2.12 クロスリファレンスを利用する
5.2.13 デバイス変数プロパティ

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 251
5.2.1 プログラムエディタの構成
■ 各部の名称と役割
メインビューステータス命令シンボルビュー
モニタコントロールズームコントロール
タイトルバー
メニューバー
ツールアイコン
■ タイトルバー
ツールのアプリケーション名や、対象とするプロジェクトファイル名を表示します。
■ メニューバー
各種操作のためのメニューキーです。ALT+(Key)で、該当のメニューをマウスを使
用せず、メニューの内容を開くことができます。

第 5 章 制御プログラムの作成
6E8C4890 252
■ ツールアイコン
よく使うメニューアイテムを、アイコンボタンで配置しています。アイコンが何を意味
しているのかは、マウスポインタをアイコンの上に置くと、そのメニュー名が表示され
ることで知ることができます。
■ ズームコントロール
メインビューに表示されたグラフィック言語を拡大、縮小するためのコントロールです。
■ モニタコントロール
メインビューに表示されたグラフィック言語のオンラインモニタを開始、停止するため
のコントロールです。
■メインビュー
グラフィカル言語(LD/FBD/SFC)を描画、編集するビューです。プログラム、ファ
ンクションブロック、ファンクションで使います。
■命令シンボルビュー
グラフィカル言語の命令シンボルのメニューです。ファンクションキーと SHIFT キー
で選択すると、フォーカスのあるメインビューのセルに命令シンボルを描画します。
命令シンボルビューは編集中のみ表示されます。
■ステータス
ステータスエリアは以下の情報が表示されます。
・ カーソルポジション表示…ページ、行、列番号を表示します。
・ コントローラ運転モード表示…コントローラと接続している場合は、コントローラ
本体の運転モードを表示します。
・ 編集中表示…プログラムエディタが編集中の場合に表示します。
・ 挿入/上書表示…プログラムエディタが編集中の場合、カーソルの入力モード(挿
入/上書)を表示します。
・ カレンダ表示…現在日付け時刻を表示します。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 253
5.2.2 タスクを開く
■起動
プログラムエディタの起動は、以下の手順でおこないます。
1) [プロダクトツリー]の該当するステーション、ユニット、モジュールを選び、モジ
ュール内のタスクを選択します。
2) メニュー<ファイル><タスクエントリ>を実行します。
以下のタスクエントリ画面が展開されます。

第 5 章 制御プログラムの作成
6E8C4890 254
3) 新規にタスクを作成する場合は、「プログラム名」および、「種別」を入力して、該
当するタスクエントリ No.にカーソルを合わせて、「プログラムエディタを開く」ボ
タンを押します。
LD,FBD,SFC のプログラムを作成する場合は、「種別」に「セミグラフィック」を
入力します。
ST のプログラムを作成する場合は、「種別」に「テキスト」を入力します。
既に作成済みのタスクを開く場合は、該当するタスクエントリ No.にカーソルを合
わせて、[プログラムエディタを開く]ボタンを押します。
また、いずれも、カーソルを合わせた箇所でダブルクリックしても起動します。
■タスクエントリの情報
タスクエントリ画面では、タスクにエントリしたプログラムに関する情報を登録・表示
することができます。
以下では、それらの情報について説明します。
「生成済」:
プログラムをコントローラへダウンロードして実行するために必要な、プログラムのデ
ータおよびコードバイナリの生成状態を示します。
・ Yes: 該当のプログラム、およびそのプログラムから呼び出しているユーザファン
クションやユーザファンクションブロックを含む、全ての POU で上書き保存(コン
パイル)が完了し、コンパイルエラーが無い状態です。
・ No: 上書き保存(コンパイル)をしていないか、コンパイルエラーが有る状態です。
「更新日付」:
プログラムの内容を更新した日付です。ここで、プログラムの更新とは具体的には次の
操作を実行することを指します。プログラムの<一時保存>、<上書き保存>、<保存
とダウンロード>、<一括コンパイル>。
○補足
・ 該当のプログラムから呼び出しているユーザファンクションやユーザファンクションブロック
を更新しただけでは更新日付は変更されません。
「ステップ数」:
プログラムのコードバイナリのサイズです。「生成済」が Yes のときにそのサイズを表
示し、No のときには 0(ゼロ)を表示します。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 255
■プログラムエディタ画面(新規タスクエントリ)
タスクエントリより新規タスクを作成して展開すると、編集できる状態になります。
プログラムの編集については、「プログラムを描画する」を参照してください。

第 5 章 制御プログラムの作成
6E8C4890 256
■プログラムエディタ画面(既存タスクエントリ)
作成済みのタスクを選択して展開した場合は、編集解除した状態になります。
編集するときは、メニュー<編集><編集する>をクリックします。プログラムの編集
については、「プログラムを描画する」を参照してください。
コントローラへ書き込む場合は、メニュー<ファイル><コントローラへ書込み>をク
リックします。コントローラの書込みについては、「タスクを個別にダウンロードする」
を参照してください。
■終了
プログラムエディタを終了するには、次の方法があります。
1) メニュー<ファイル><終了>を実行します。
2) タイトルバー右端の[×]をクリックします。
3) タイトルバー左端のアイコンをダブルクリックします。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 257
■タスクエントリの実引数を登録する
プログラムに仮引数(VAR_INPUT,VAR_IN_OUT,VAR_OUTPUT)があるとき、
実引数としてそのコントローラからアクセスできるグローバル変数を与える必要があ
ります。
以下にその手順を説明します。
1) タスクエントリ画面にて、[実引数の登録]ボタンを押します。
2) タスクエントリ引数画面が表示されます。
3) プログラムの仮引数に与えるグローバル変数を入力します。仮引数の表示順に合わ
せて、「実引数」にグローバル変数を入力してください。「No.」の値を変更すると、
実引数の順番を変更することができます。

第 5 章 制御プログラムの作成
6E8C4890 258
5.2.3 プログラムを描画する
LD(ラダー・ダイヤグラム)/FBD(ファンクション・ブロック・ダイヤグラム)/SFC
(シーケンシャル・ファンクション・チャート)の入力、編集の仕方を説明します。
■フォームの調整
・ [命令シンボルメニュー]はメニュー<編集><編集する>で表示を ON/OFF で
きます。モニタ中など、画面を広く使いたいときに便利です。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 259
■ カーソルの操作
・ メインビューをクリックすると、カーソルが登場します。
・ カーソルは、[←],[→],[↑],[↓]で移動します。
・ 縦に細いカーソルのとき、挿入モード、幅広のとき、上書きモードです。
・ 挿入モード/上書きモードは、キー[Insert]で切り替えます。
・ 上書きモードのとき、カーソルの大きさが1セルの大きさです。
・ カーソルの現在位置は、ポジションビューに行、列の No で示されます。
・ 複数のセルを選択するにはカーソルをドラッグ(マウスの左ボタンを押しながら移
動すること)します。
1 セルの大きさ カーソル
■ 編集を開始する
・ 編集を始めるには、メニュー<編集><編集する>を実行するか下記のツールアイ
コンをクリックしてください。
・ もう一度、メニュー<編集><編集する>を実行するか下記のツールアイコンをク
リックすれば、編集モードは解除されます。

第 5 章 制御プログラムの作成
6E8C4890 260
■ 命令シンボルの入力
・ メインビューにカーソルを置きます。
[命令シンボルビュー]のファンクションキーを押下します。[命令シンボルビュー]
は上段と下段に分れていますが、上段を選択するには、[Shift]キーと同時にファ
ンクションキーを押下します。第1階層は、命令シンボルの種類を示すだけで、実
際には第2階層の命令シンボルを選択するとカーソル位置に描画されます。
・ SFC の命令シンボルを入力するときは、「上書きモード」にしてください。
・ 接点、コイル、ファンクションブロック、LD、ST、SET、STEP のように変数名の
指定が必要な命令シンボルは、暗黙の変数名が自動的に表示されます。
・ マウスを使って命令シンボルを選択することもできますが、慣れればキ-入力の方
が効率がよいでしょう。
・ 命令シンボルを削除するには、[DEL]キーで行います。
・ LD/FBD の左母線、垂直接続線、水平接続線もキー割り付けしています。
・ 左母線と垂直接続線を消すには、もう一度同じキーを押してください。[DEL]キー
で消すことはできません。
水平接続線 垂直接続線 左母線
LD:ラダーダイヤグラム
・ SFC の条件分岐線、並列実行線、ステップ接続線もキー割り付けしています。
・ 条件分岐線、並列実行線を消すには、もう一度同じキーを押してください。[DEL]
キーで消すことはできません。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 261
SFC:シ-ケンス・ファンクション・チャート
条件分岐線
ステップ接続線 並列実行線

第 5 章 制御プログラムの作成
6E8C4890 262
■プログラム描画の編集操作
・ プログラム描画に必要な編集操作を下表に示します。
操作 キー入力
カーソルをひとつ移動する [←],[→],[↑],[↓]
カーソルを左端または右端へ移動する
[Ctrl]+[←], [Ctrl]+[→]
挿入モードにする [Insert]でカーソルの幅を狭くします。
上書きモードにする [Insert] でカーソルの幅を広くします。
命令シンボルを描画する 命令シンボルを描画したい位置にカーソルを移動し、[F1] - [F12] または[Shift]+[F1] -[Shift]+[F12]で命令語のグループの階層を降りて、さらに同キーで希望する命令シンボルを選択するとカーソル位置に描画されます。階層を戻るには,[ESC]キーを使います。横線([F11]+[F1])は、命令シンボルの一種として扱われます。
ファンクションまたはファンクションブロックを描画する
ファンクションまたはファンクションブロックを描画したい位置にカーソルを移動し、[Shift]+[F2] , [F1]を押すとファンクションまたはファンクションブロックを選択するダイアログが出るので、選択すれば、描画できます。
命令シンボルを削除する カーソルを削除したい命令シンボルに合わせ、[Del]で削除します。 ただし、母線と縦線は削除されません。
母線と縦線を削除する カーソルを削除したい母線または縦線に合わせ、同じ母線および縦線を示すファンクションキーで削除します。母線のファンクションキーは,[F11]+[F3]、縦線のファンクションキーは[F11]+[F2]です。
回路をコピーする カーソルをコピーしたい回路の左上隅にあわせ、[Shift]を押しながら[←],[→],[↑],[↓]で移動し、コピーしたい矩形領域の回路を選択します。この状態で、[Ctrl]+[C]とすれば、内部的なバッファにコピーされます。マウスの右ボタンをクリックして表示されるメニューの<コピー>でも同様です。
回路を切り取る カーソルを切り取りたい回路の左上隅にあわせ、[Shift]を押しながら[←],[→],[↑],[↓]で移動し、コピーしたい矩形領域の回路を選択します。この状態で、[Ctrl]+[X]とすれば、内部的なバッファにコピーされると同時に、グラフィックも削除されます。マウスの右ボタンをクリックして表示されるメニューの<切り取り>でも同様です。
回路を貼り付ける 内部バッファに回路があれば、カーソルを貼り付けしたい、空の場所に移動し、[Ctrl]+[V]で貼り付けします。内部バッファの内容は、まだ失われないので、空の場所に続けて、同じ回路を貼り付けることができます。マウスの右ボタンをクリックして表示されるメニューの<貼り付け>でも同様です。
回路を削除する カーソルを削除したい回路の左上隅にあわせ、[Shift]を押しながら[←],[→],[↑],[↓]で移動し、削除したい矩形領域の回路を選択します。この状態で、[Del]すれば、削除されます。このとき、内部バッファの内容は変化しません。マウスの右ボタンをクリックして表示されるメニューの<削除>でも同様です。
回路をスクロールする カーソルを[←],[→],[↑],[↓]を押し続ければ、メイングラフィック部に表示できない大きな回路をスクロールして表示します。
行を挿入する カーソルを挿入したい行にあわせ、メニュー<編集><セルワークシート><行挿入>を選択します。
行を削除する カーソルを削除したい行にあわせ、メニュー<編集><セルワークシート><行削除>を選択します。
編集を元に戻す メニュー<編集><元に戻す>を選択します。 マウスの右ボタンをクリックして表示されるメニューの<元に戻す>でも同様です。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 263
5.2.4 変数を入力する
■ 変数名のキー入力
・ 命令シンボルにカーソルを移動し、[Enter]します。下図に示すように、テキスト
ボックスが登場するので、変数名をキー入力し、[Enter]すればテキストボックス
は消えて、命令シンボル上に描画されます。
・ 一般に、命令シンボルをすべて入力、描画してから、変数名を入力したほうが、効
率がいいでしょう。
■ 変数をドラッグ&ドロップする
・ 既に、変数が宣言されているのであれば、その変数の表を表示しておいて、そこか
ら変数を命令語にドラッグ&ドロップすることができます。次の手順で行います。
1) メニュー<編集><利用できる変数を開く>を実行し、[変数]画面を開きます。
2) 希望する変数名にマウスポインタを置き、左ボタンを押したまま、変数を入力した
い命令語までマウスポインタを移動し、ボタンを離します。このとき命令語に対し
て変数名が入力されます。
Drag&Drop

第 5 章 制御プログラムの作成
6E8C4890 264
■暗黙の変数名を変更する
・ 命令シンボルのうち、接点、コイル、LD、ST、SET、ファンクションブロック、ス
テップ、トランジションなどは、命令シンボルを描画したとき、暗黙の変数名を自
動的に表示します。
・ これは、メニュー<ツール><暗黙の変数名>で、下記ダイアログで設定すること
ができます。
・ 基底名は変数名の一部ですから、変数名の約束に従って、設定してください。
・ 上図のダイアログで、[命令シンボル入力時に、暗黙の変数名を発生させる]をチェ
ックオフすると、変数名は発生しないようになります。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 265
5.2.5 変数を宣言する
■編集ロック
起動時は編集ロック(登録内容の変更・削除不可)状態になっています。
既存登録の入力操作を行なう場合には、編集ロックを解除してください。
なお、追加行(左端の列に'*'がついている行)による追加は、いつでも可能です。
●重要
呼び出し元のプログラムに影響を与えますので、必ず次の操作を行ってください。
・ ファンクションブロック内でローカル変数を追加、変更または削除した場合は、呼び出し元の
プログラムで、このファンクションブロックの変数を削除後、再登録してください。
・ ファンクション、ファンクションブロックの引数を変更した場合は、呼び出し元のプログラム
で、このファンクション、ファンクションブロックの命令シンボルを削除後、再描画してくだ
さい。
また、変数宣言を変更または削除すると、これを参照するプログラムに影響を与えることがあ
るので注意してください。
■変数宣言文を入力する
変数宣言文は、以下の手順で入力できます。
1) メニュー<編集><利用できる変数>を実行して、ダイアログ[変数]を表示します。
このとき、既存の変数宣言文があれば、表形式で表示されます。
2) アスタリスク(*)のマークのある行にフォーカスを移動して、[変数],[データ
型],[コメント],[宣言種別],[読出専用],[宣言順]の項目を設定します。
ダイアログを閉じた時点で宣言されます。
●重要
・ローカル変数の登録
プログラムをダウンロードしたときコントローラでの値の継続性を保つようにするために、登
録の変更・削除時には以下のように動作します。
1)変数宣言においてローカル変数を削除しても、その時点でパッキング処理(空きアドレス領
域が無いように先頭からの再割付け)は行いません。削除した後、宣言順を入力せずに新規
に追加すると、削除した所には割り付けず、後置追加されます。
2)変数宣言においてローカル変数のデータ型を変更した時には、その変数を一旦削除し、後置
追加した時と同じ処理になります。
3)1),2)操作を繰り返していくと割付が可能な空きアドレスが無くなり、ローカル変数が登録
できなくなることがあります。このときは、一括コンパイルを実行するか、既に登録してい
る変数の宣言順を変更してください。パッキング処理され、登録が可能となります。

第 5 章 制御プログラムの作成
6E8C4890 266
・ コントローラ変数の登録
エンジニアリングをより安全におこなっていただくために、登録の変更・削除時には以下のよ
うに動作します。
1)変数宣言においてコントローラ変数を削除しても、その後削除したアドレスには自動割付さ
れません。
2)変数宣言においてコントローラ変数のデータ型を変更しても、その後変更前のアドレスには
自動割付されません。
3)変数宣言においてコントローラ変数のアドレスを変更しても、その後変更前のアドレスには
自動割付されません。
4)1)~3)操作を繰り返していくとコントローラ変数が登録できなくなることがあります。こ
のときは、一括コンパイルを実行してください。自動割付されなかったアドレスにも再度割
付が可能となります。
・ 変数名等の検索は、[検索する文字]を指定し、ボタン[検索]をクリックします。
[検索する文字]はワイルドカードの指定も可能です。例えば、’HM*’と指定すれ
ば、’HM’で始まるすべての変数だけを表示します。また、空文字を指定すれば、す
べての変数を表示します。
I/O、ステーション、ネットワークは参照のみです。
■ ファンクションブロック変数や一般の変数の宣言
変数宣言は、ダイアログ[変数]でキータイプする他に、次の手順で行うことができま
す。
1) 希望するプログラム(PRG)またはファンクションブロック(FBK)を開きます。
2) 下図のアイコン(A)をクリックして[編集中]の状態にします。
3) [メインビュー]、にファンクションブロックや接点、コイル、LD,ST など変数を
必要とする命令シンボルを描画します。このとき、暗黙の変数名(例:V1,V2、C1,C2
等)が表示されますが、必要ならこれを変更します。
4) 保存の時、未定義の変数があれば未定義の変数ダイアログに表示されます。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 267
5) 範囲、種類、データ型をリストより選択してください。初期値、コメントは必要で
あれば入力します。範囲、 種類はリスト選択のみです。種類を VAR_INPUT にす
るなど範囲、種類を選択可能なもの以外に設定する場合はダイアログ[変数]にて設
定してください。データ型はキータイプ可能です。また、左端のチェックボックス
を外すことで、該当の変数は登録から除外できます。
6) ボタン[登録]をクリックすると変数宣言完了です。
7) 変数宣言の結果は、メニュー<編集><利用できる変数を開く>、もしくは下図の
アイコン(B)をクリックしてダイアログ[変数]にて確認できます。
(B) (A)
●重要
呼び出し元のプログラムに影響を与えますので、必ず次の操作を行ってください。
・ ファンクションブロック内でローカル変数を追加、変更または削除した場合は、呼び出し元の
プログラムで、このファンクションブロックの変数を削除後、再登録してください。
・ ファンクション、ファンクションブロックの引数を変更した場合は、呼び出し元のプログラム
で、このファンクション、ファンクションブロックの命令シンボルを削除後、再描画してくだ
さい。

第 5 章 制御プログラムの作成
6E8C4890 268
■未定義変数リストでのスコープを自動決定する
1) メニュー<ツール><接頭語の設定>にて変数の接頭語を登録します。
2) 変数名に接頭語を付ければ以下のように未定義変数に自動的に設定されます。
対象の命令語は、接点、コイル、ゲート、LD、ST、SET 微分接点、微分コイルです。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 269
5.2.6 ファンクションを使う
基本的なグラフィックの描画の操作方法は、「プログラムを描画する」の項を参照し
てください。ここでは、ファンクションに特化して説明します。
■ファンクションを描画する
・メインビューにフォーカスし、カーソルを表示します。
・命令シンボルビューで、ファンクションを選択します。
・下図ダイアログで、ファンクションを選択、ボタン[選択]をクリックします。
・カーソル位置に ファンクションが描画されます。

第 5 章 制御プログラムの作成
6E8C4890 270
■ファンクションの入力点を変更する
・ 標準ファンクションには、入力点数(入力引数の数)が変更できるものがあります。
入力引数に名前がないものが対象になります。例:MUL_REAL。
・ ファンクションがはじめて描画されたとき、入力点数は 小です。
・ 入力点数を増やすには、下図に示すように、入力点の 後にカーソルを置いて、
[F2]キーを押します。すると、入力点が一点増えて、ファンクションの形状が縦
に長くなります。
入力点の 後
入力点の 後
[F2]

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 271
■実行制御付きのファンクションを描画する
・ 実行制御付きのファンクションとは、入力引数、出力引数が EN,ENO であるもので
す。
・ ダイアログ[ファンクション・ファンクションブロックの選択]で、ファイル名の末
尾が’@’のものが該当します。
・ そのファンクションにフォーカスすると、チェックボックス[EN/ENO 付きにす
る]が有効になるので、これをチェックして、ボタン[選択]を押すと、ファンクシ
ョンが実行制御付きとして描画されます。
■ ファンクションを複写する
・ ファンクションは同じ、プログラムの中で何度も使うことがあります。
・ その場合は、上記の手順を繰り返してファンクションを描画するより、グラフィッ
クシンボルのコピー/ペーストをした方が、効率よく編集できます。
・ ファンクションをコピーするには、カーソルをファンクションの左上において、
[Shift]+ [←],[→],[↑],[↓] でコピー範囲を選択し、[Ctrl]+[C]。こ
れで、選択範囲は、内部バッファにコピーされます。
・ 内 部 バ ッ フ ァ か ら ペ ー ス ト す る に は 、 カ ー ソ ル を 空 き 領 域 に 移 動 し て 、
[Ctrl]+[V]とします。
コピー ペースト

第 5 章 制御プログラムの作成
6E8C4890 272
5.2.7 ファンクションブロックを使う
■ファンクションブロックを描画する
・ ファンクションの描画と同じ操作です。「ファンクションを使う」の項を参照してく
ださい。
■ファンクションブロックの変数を宣言する
・ ファンクションブロックは、履歴性をもつデータを内包しています。そのためファ
ンクションブロック自体を静的な変数として宣言する必要があります。
・ ファンクションブロックの変数は、呼び出し側のプログラムまたはファンションブ
ロックのローカル変数として宣言します。
・ 例えば、ファンクションブロックとして、オンディレータイマ(TON)を3つ使って
いるプログラムがあるとします。その変数名は、TON_1,TON_4,tmEMG である
とします。メニュー<編集><利用できる変数を開く>からローカル変数の変数宣
言を次のように記述します。ここで、ファンクションブロック名(TON)は、独自の
データ型として扱われます。
■ ファンクションブロックを複写する
・ ファンクションブロックは同じ、プログラムの中で何度も使うことがあります。
・ その場合は、上記の手順を繰り返してファンクションブロックを描画するより、グ
ラフィックシンボルをコピー/ペーストをした方が、効率よく編集できます。
・ ファンクションブロックをコピーするには、カーソルをファンクションブロックの
左上において、[Shift]+ [←],[→],[↑],[↓] 、またはマウスドラッグでコ
ピー範囲を選択し、[Ctrl]+[C]。これで、選択範囲は、クリップボードにコピー
されます。
・ クリップボードからペーストするには、カーソルを空き領域に移動して、
[Ctrl]+[V]とします。
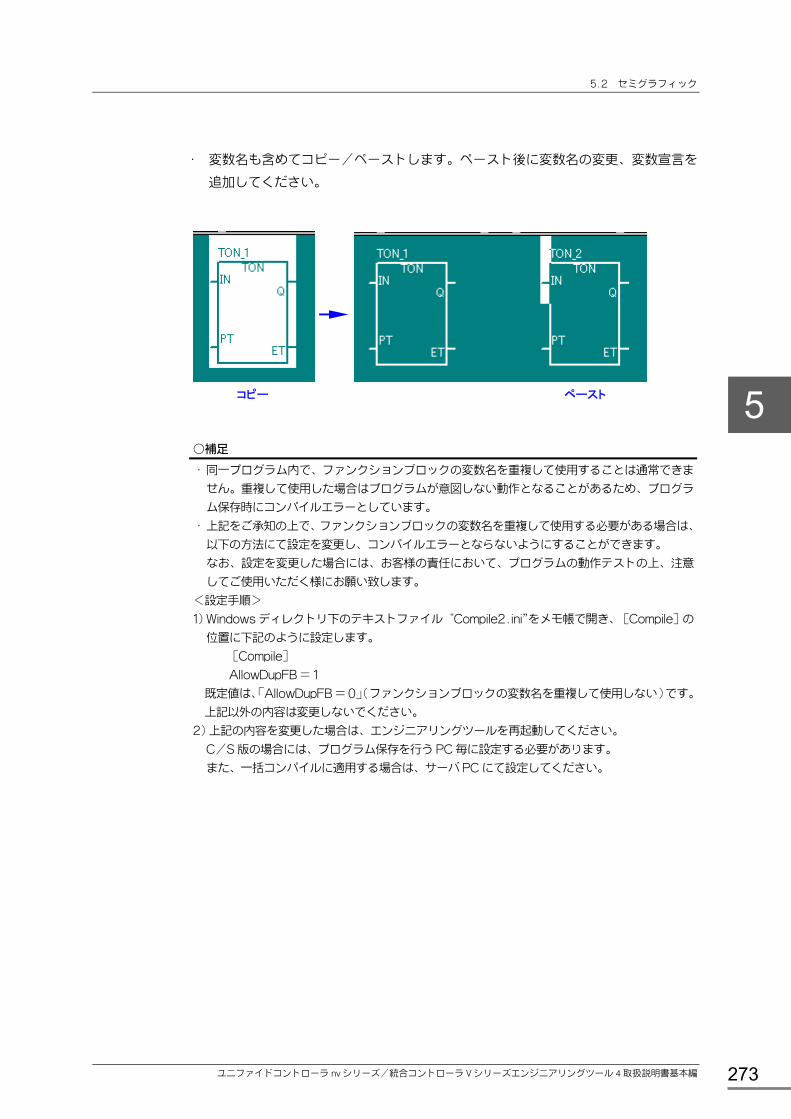
5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 273
・ 変数名も含めてコピー/ペーストします。ペースト後に変数名の変更、変数宣言を
追加してください。
コピー ペースト
○補足
・ 同一プログラム内で、ファンクションブロックの変数名を重複して使用することは通常できま
せん。重複して使用した場合はプログラムが意図しない動作となることがあるため、プログラ
ム保存時にコンパイルエラーとしています。
・ 上記をご承知の上で、ファンクションブロックの変数名を重複して使用する必要がある場合は、
以下の方法にて設定を変更し、コンパイルエラーとならないようにすることができます。
なお、設定を変更した場合には、お客様の責任において、プログラムの動作テストの上、注意
してご使用いただく様にお願い致します。
<設定手順>
1)Windows ディレクトリ下のテキストファイル“Compile2.ini”をメモ帳で開き、[Compile]の
位置に下記のように設定します。
[Compile]
AllowDupFB = 1
既定値は、「AllowDupFB = 0」(ファンクションブロックの変数名を重複して使用しない)です。
上記以外の内容は変更しないでください。
2)上記の内容を変更した場合は、エンジニアリングツールを再起動してください。
C/S 版の場合には、プログラム保存を行う PC 毎に設定する必要があります。
また、一括コンパイルに適用する場合は、サーバ PC にて設定してください。

第 5 章 制御プログラムの作成
6E8C4890 274
5.2.8 変数や命令語を検索・置換する
プログラムエディタにおいて、ひとつのタスク(1プログラム)内、またはコントロ
ーラ内の、変数名、命令語を検索したり、置換するには次の手順で行います。
検索・置換対象は以下のとおりです
命令語 対象
接点/コイル 変数
F/FB (FB の)インスタンス名、F/FB 名 (命令語検索時のみ)
LD,ST,SET 変数
ゲート 変数
Bool 型 Action Timer 値、Action 変数
User 型 Action Timer 値、Action 名、インディケータ
ステップ ステップインスタンス
トランジション 変数
IF/CASE/FOR/WHILE/REPEAT 条件式、初期値、 終値、増分
Jump/ラベル ラベル
■ 文字列を検索する
プログラムエディタにおいて、
1) メニュー<編集><検索/置換>をクリックします。
2) <検索する文字列>で検索する文字を入力します。
3) 検索範囲として、<範囲><方向><比較>を適宜選択します。
<範囲> <ローカル>:現在フォーカスしているタスク(プログラム)内を範囲とします。<コントローラ>:現在のコントローラ内を範囲とします。
<方向> (ローカルの場合有効)
<上方向>:上方向に検索します。 <下方向>:下方向に検索します。
<比較> <検索文字と一致>:検索文字と一致する文字列を検索します。 <検索文字を含む>:検索文字を含む文字列を検索します。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 275
4) ボタン[次を検索]を押します。
<ローカル>範囲の検索の場合:検索結果があれば、その場所にカーソルを移動し
ます。
<コントローラ>範囲の検索の場合:検索ダイアログが表示されます。
検索文字列 = POUNo : プログラム名 : Action シート名 : シート内ペ
ージ No-ページ内行:列
5) <ローカル>範囲の検索の場合、検索結果が2つ以上あるとき、ボタン[次を検索]
を押せば、その次の場所にカーソルを移動します。
・比較で<検索文字を含む>にした場合、ワイルドカード検索を行なうことが出来ます。
文字パターン 一致する文字
? (半角) 任意の 1 文字
* (半角) 任意の数の文字
# (半角) 任意の 1 文字の数字 (半角)
・検索は、“語句“として検索します。次に検索の事例を示します。 検索文字列と一
致 検索文字を含む
(ワイルドカード使用) 検索文字を含む
(ワイルドカード使用)
検索する文字 “ ABCDE ” “ ABCDE* ” “ *ABCDE ”
検索される文字 “ ABCDE ” “ ABCDE ” , “ ABCDE[100] ” “ ABCDE ” , “ D.ABCDE ”
検索されない文字 “ ABCDE_1 ” “ AABCDEE ” “ DATA_ABCDEF “

第 5 章 制御プログラムの作成
6E8C4890 276
■ 命令語を検索する
プログラムエディタにおいて、
1) メニュー<編集><検索/置換>をクリックします。
2 ダイアログ下段の、命令シンボルビューから検索したい命令語シンボルを選択しま
す。
ファンクション・ファンクションブロックの場合は、「FUN」命令シンボルの選択
により、「ファンクション・ファンクションブロックの選択」ダイアログが展開され
ますので、検索したいファンクション・ファンクションブロックを選択します。
3) 検索範囲として、<範囲><方向>を適宜選択します。
<比較>は文字列の検索用なので、設定は特に必要ありありません。
4) ボタン[次を検索]を押します。検索結果があれば、その場所にカーソルを移動しま
す。
5) 検索結果が 2 つ以上あるとき、ボタン[次を検索]を押せば、次の結果が検索されま
す。
6) 命令語検索を止めるにはダイアログ下段の、命令シンボルビューの空白部を選択し
ます。
<コントローラ>範囲の検索の場合:検索ダイアログが表示されます。
■ 字列および命令語を組合せて検索する
プログラムエディタにおいて、
1) メニュー<編集><検索/置換>をクリックします。
2) <検索する文字列>を選択します。
3) ダイアログ下段の、命令シンボルビューから検索したい命令語シンボルを選択しま
す。
4) 検索範囲として、<範囲><方向><比較>を適宜選択します。
5) ボタン[次を検索]を押します。検索結果があれば、その場所にカーソルを移動しま
す。
6) 検索結果が2つ以上あるとき、ボタン[次を検索]を押せば、次の結果が検索されま
す。
<コントローラ>範囲の検索の場合:検索ダイアログが表示されます。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 277
■ 文字列を置換する
<ローカル>
プログラムエディタにおいて、
1) 編集モードにして、メニュー<編集><検索/置換>をクリックします。
2) 範囲を<ローカル>にします。
3) <検索する文字列>を入力します。
4) <置換後の文字列>を入力します。
5) ボタン[置換]を押すと検索結果にカーソルが移動し、置換後の文字列に置き換わ
ります。
<コントローラ>
プログラムエディタにおいて、
1) 表示モードにして、メニュー<編集><検索/置換>をクリックします。
2) 範囲を<コントローラ>にします。
3) <検索する文字列>を入力します。
4) <置換後の文字列>を入力します。
5) ボタン[一括置換]を押すと検索結果がダイアログに表示されます。
6) [置換]ボタンを押すと検索された文字列が置換されます。
●重要
・置換したプログラムは上書き保存する必要があります。

第 5 章 制御プログラムの作成
6E8C4890 278
5.2.9 さまざまな編集・表示機能
ここでは、プログラムエディタで、これまで説明していない編集および表示機能つい
て説明します。
■ 行・列の挿入・削除
・ メインビューで行および列の挿入・削除ができます。
・ メニュー<セルワークシート><行挿入>を実行すると、カーソルの行に1行挿入
します。
グラフィック回路の途中の行には挿入されません。
・ メニュー<セルワークシート><行削除>を実行すると、カーソルの行の1行を削
除します。
グラフィック回路の途中の行はは削除されません。
・ メニュー<セルワークシート><列挿入>を実行すると、カーソルの列に1列挿入
します。
グラフィック回路の途中の列でも回路を分断して挿入します。
・ メニュー<セルワークシート><列削除>を実行すると、カーソルの列のに1列削
除します。
グラフィック回路の途中の列でも回路を削除します。
・ メニュー<セルネットワーク><行挿入>を実行すると、回路を保持できるとき、
1行挿入します。
・ メニュー<セルネットワーク><行削除>を実行すると、回路を保持できるとき、
1行削除します。
■ ページ No を付ける
・ メインビューのグラフィック回路が大きいとき、機能的なまとまりを示すためにペ
ージに区切りたい時があります。
・ ページを区切るには、まずカーソルを他の回路がない行に置きます。
・ メニュー<編集><ページ区切りの挿入>を実行し、ページ No を付けて OK とし
ます。
・ ページ区切りは下図のシンボルです。これがページの終わりを示します。
・ ページ区切りを削除するには、メニュー<編集><ページ区切りの削除>を実行し
ます。
・ ページを振り直すには、メニュー<編集><ページの振り直し>で付け替えます。
・ ページ区切りは、プログラムの変更に伴い、ページ No が振り直ししなくて済むの
がベストです。そのため、ある増分で振ることができます。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 279
・ ページ区切りがあれば、後述の印刷では、ページ毎に分けて印刷します。
・ ページ区切りがあれば、メニュー<編集><ジャンプ>でページ No を指定したり、
前ページ、次ページのジャンプができます。
■ 自由なコメントを入力する
・ メインビューには、自由なコメントを入力することができます。自由なコメントは、
グラフィック回路の可読性を高めるのに役に立ちます。
・ カーソルをグラフィックシンボルや、ページ区切り等のないセルに置きます。
・ メニュー<編集><コメント編集>を実行します。
・ テキスト入力のダイアログが出るので、自由にコメントを入力して、[OK]すれば
カーソル位置に描画されます。
・ 自由コメントは、カット&ペーストで削除したり、移動、複写することができます。
■ 拡大・縮小する
・ メインビューのグラフィックは、暗黙を 100%として、60%から 140%の間で 20%
刻みに変更することができます。
・ メニュー<表示><拡大・縮小>またはツールバーのズ-ムコントロールで拡大率
を指定します。
■ グラフィックの色やサイズを変更する
・ メインビューの背景色、線色、モニタ色、セルの大きさは変更することができます。
・ メニュー<ツール><セルの大きさと色の設定>を実行します。
・ [セルの大きさと色の指定]は暗黙で[標準]ですが、これ以外に、ユーザとすれば、
色やサイズを変更して、これを記憶し、次回からもこの設定で表示されます。

第 5 章 制御プログラムの作成
6E8C4890 280
■ ツールアイコン
ツールアイコンの意味は次のとおりです。
貼り付け
コピー
コントローラへ書込み
切り取り
印刷
上書き保存
開く
元に戻す
行挿入
行削除
列挿入
列削除
利用できる変数を開く
編集する
データ値モニタ
削除
・ツールアイコン上にマウスと置くとその意味が表示されます。
・ツールアイコンの機能は、メニューでも用意されています。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 281
5.2.10 タスクを保存する
■上書き保存する
・ メニュー<ファイル><上書き保存>で、編集完了のプログラムを、コンパイルし
て保存します。
・ コンパイルでエラーがなければ、コンパイルを完了し、保存します。
・ コンパイルエラーがあれば、エラーリストを表示するかの旨メッセージが出ます。
・ エラーリストがあると、メニュー<編集><コンパイルエラーリスト>が有効にな
りますので、こちらでも開くことができます。
・ エラーリストの例を下図に示します。
・ エラー個所を知るには、エラーリストの行にフォーカスして、ボタン[ 開く ]を押
下すれば、メインビューの該当個所にカーソルを移動します。
・ エラーリストは、ボタン[印刷]で、印刷出力することができます。
・ コンパイラは複数のエラーを検出していますので、同じようなエラーが連続して表
示されることがあります。
○補足
・プログラムの変更箇所だけが保存される“差分保存方式”を採用しているため、初回に比して2
回目以降は保存時間が短縮されます。
■ 一時的に保存する
・ メニュー<ファイル><一時保存>で、現在編集中のプログラムを、コンパイルし
ないで保存します。
・ 編集の途中や、コンパイルエラーを認識している場合などで、一時的に保存したい
ときに使用します。

第 5 章 制御プログラムの作成
6E8C4890 282
5.2.11 変数コメント・命令語の実行順序を表示する
■データ型を表示する
[プログラムエディタ]において、コンパイルが完了したタスク(プロジェクト)では、
命令語や変数のデータ型を表示することができます。
1) メニュー<表示><データ型表示>をクリックします。
下記のように、データ型が表示されます。
データ型
略号の意味は次のとおりです。
略号 意味
< B > BOOL 型
< W > WORD 型
< DW > DWORD 型
< I > INT 型
< UI > UINT 型
< DI > DINT 型
< R > REAL 型
< T > TIME 型
< D > DATE 型
< TD > TOD 型
< DT > DT 型
< ST > STRING 型
2) データ型の表示をやめるときは、再度、メニュー<表示><データ型表示>をクリ
ックします。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 283
■ 変数コメントを表示する
[プログラムエディタ]において、コンパイルが完了したタスク(プロジェクト)では、
変数のコメントを表示することができます。
1) メニュー<表示><デバイスコメント表示>をクリックします。
下記のように、変数名の上に変数コメントが表示されます。
変数コメント
2) 変数コメントの表示をやめるときは、再度、メニュー<表示><デバイスコメント
表示>をクリックします。
■ 命令の実行順序を表示する
[プログラムエディタ]において、コンパイルが完了したタスク(プロジェクト)では、
命令語の実行順(ステップ番号)を表示することができます。
1) メニュー<表示><ステップ番号表示>をクリックします。
下記のように、ステップ番号が表示されます。
ステップ番号
2) ステップ番号の表示をやめるときは、再度、メニュー<表示><ステップ番号表示
>をクリックします。

第 5 章 制御プログラムの作成
6E8C4890 284
5.2.12 クロスリファレンスを利用する
クロスリファレンスとは、変数が、どのステーションの、どのコントローラの、どの
タスク(プログラム)で参照、または代入されているのかを示すものです。
これは、プログラムが期待しない動作であるとき、データの発生場所を調べたり、逆
にデータの利用個所を調べたりするのに大変役に立ちます。
■ クロスリファレンスリストを表示する
1) プログラムエディタにおいて、タスクを開きます。
2) タスクがコンパイル済みで、プログラムエディタが読み取り専用のとき、検索する
変数にカーソルを合わせ、メニュー<編集><クロスリファレンスリスト>をクリ
ックします。マウスの右クリックメニューの<クロスリファレンスリスト>でも可
能です。
3) 画面が表示され自動的に検索が開始されます。
また、2)で変数を選択しないままで画面を表示した場合などは、以下の手順で検索す
ることもできます。
1) 検索するデバイス変数名を入力します。
” ABC “のように変数名を直接指定したり、” ABC*” , “ ?ABC ”のようにワイルドカ
ードを使って、間接的に指定すれば、その名前規則に合致する変数名だけのクロス
リファレンスを表示することができます。あいまい検索は以下のように“*”や“?”
を入力することで行えます。
例1) *_J5 ,CBM_* ,CBM.* :*は任意の複数文字
例2) CBM_?1 ,C?0 ,ABC[?] :?は任意の1文字
入力したデバイス変数名の条件に完全一致した(部分一致ではない)デバイス変数
に対してリファレンスを表示します。
2) ボタン[検索]をクリックします。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 285
各項目の意味は以下のとおりです。
○補足
・ 下表はジャンプ先がセミグラフィックの場合です。ジャンプ先のプログラムエディタがフルグ
ラフィック/テキストの場合は、それぞれの説明を参照してください。
・エンジニアリングツールのバージョンによっては、表示項目が少ない場合があります。
・ エンジニアリングツールのバージョンによっては、1 台の PC でクロスリファレンス検索ウィン
ドウを 大 20 個まで表示することができます。
項目名 検索結果
S 起動元の 1 箇所のみに”*”を表示します。
変数名 検索されたデバイス変数名
ステーション ステーション名
スロット No. メインモジュールのスロット No.
タスク 変数が参照、代入されているタスク
エントリ No. タスクエントリ No.
POU 名 プログラム名
アクション/フェーズ アクション名またはフェーズ名
ページ/シート No. ページ No..
行 ページ上の行番号
列 ページ上の列番号
参照 LD、ST、SET、接点、コイル、セットコイル、リセットコイル Note:
空欄は、その位置(行・列)にファンクションブロック/ファンクションの命令シンボルがあり、検索された変数の実態がないことを示します。つまり、検索した変数名が、そのファンクションブロック/ファンクション内で使用されていることを意味します。
■ プログラムを開く
クロスリファレンスリストに示された位置(ステーション/スロット/タスク)のプロ
グラムを開くには、つぎの手順で行います。
1) クロスリファレンスリストの注目する行をクリックします。
2) ボタン[開く]をクリックします。
プログラムエディタが開かれ、この行で指定された位置にカーソルが移動します。
オンライン/オフライン状態は、ジャンプ先で呼び出し状態を継続します。
○補足
・ ジャンプ先がファンクションブロック/ファンクション内の場合、ライブラリ起動と同じ状態
で開きます。
つまり、必ずオフライン状態で開きます。

第 5 章 制御プログラムの作成
6E8C4890 286
5.2.13 デバイス変数プロパティ
プログラムで使用しているデバイス変数の属性を、表示することができます。
■ 制約事項
デバイス変数プロパティの表示中に、表示内容に該当する項目が、他のアプリケーショ
ンや他のユーザにより、変更された場合でも、表示内容の自動リフレッシュは行ないま
せん。
一旦デバイス変数プロパティ画面を閉じてから、再度表示してください。
■ デバイス変数プロパティを開く
1) [プログラムエディタ]のメインビュー上において、属性を表示したい変数にカー
ソルを合わせ、メニュー<表示><デバイス変数のプロパティ>をクリックします。
マウスの右クリックメニューでの<デバイス変数のプロパティ>でも同様です。

5.2 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 287

第 5 章 制御プログラムの作成
6E8C4890 288
・表示項目
アイテム\スコープ ネットワーク ネットワークI/O
ステーション ステーションI/O
コントローラ コントローラI/O
ローカル
デバイス変数 ○ ○ ○ ○ ○ ○ ○
デバイスコメント ○ ○ ○ ○ ○ ○ ○
データ型 ○ ○ ○ ○ ○ ○ ○
ネットワーク ○ ○ - - - - -
ネットワークモジュール ○ ○ - - - - -
ステーション - ○ ○ ○ ○ ○ ○
コントローラ - ○ ○ ○ ○ ○ ○
I/O モジュール - ○ - ○ - ○ -
スキャンデータアドレス ○ ○ - - - - -
コントローラメモリ ○ ○ ○ ○ ○ ○ ○
メモリデータアドレス ○ ○ ○ ○ ○ ○ -
プログラム - - - - - - ○
入出力 ○ ○ ○ ○ - ○ ○
・ スコープ…NETWORK(ネットワーク),STATION(ステーション),CONTROLLER(コントロー
ラ),LOCAL(ローカル)いずれか表示します。
・ デバイス変数…{Device name}の書式で表示します。
・ デバイスコメント…{Device comment}の書式で表示します。
・ データ型…{Data type}の書式で表示します。
・ ネットワーク…{NetNo}:{Network CatCode}:{Network Comment}の書式で表示し
ます。
・ ネットワークモジュール…{NodeNo}:{Node CatCode}の書式で表示します。
・ ステーション…{Station name}の書式で表示します。
・ コントローラ…{SlotNo}:{Controller Catcode}:{Contoller Comment}の書式で表示し
ます。
・ I/O モジュール…{MM-BB-UU-SS.WordNo[.BitNo][,IO Area Name]}:{I/O
Module Catcode}の書式で表示します。
・ スキャンデータアドレス…{Talker BlockNo}.{WordNo}[.{BitNo}]の書式で表示します。
・ コントローラメモリ…{Memory Block Name}の書式で表示します。
・ メモリデータアドレス…{%MW*}(IQ*)の書式で表示します。
・ プログラム名…{POU Name}の書式で表示します。
・ 入出力…INPUT,OUTPUT,IN_OUT のいずれかを表示します。

5.3 テキスト
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 289
5.3 テキスト
ここでは、「プログラムエディタ(テキスト)」で ST(ストラクチャードテキスト)
の制御プログラムを作成するときの操作を説明します。以下では、次の内容を説明しま
す。
エンジニアリングツール2ではサポートしていません。
・5.3.1 プログラムエディタの構成
・5.3.2 タスクを開く
・5.3.3 プログラムを記述する
・5.3.4 変数を入力する
・5.3.5 変数を宣言する
・5.3.6 ファンクションを使う
・5.3.7 ファンクションブロックを使う
・5.3.8 変数を検索・置換する
・5.3.9 タスクを保存する
・5.3.10 クロスリファレンスを利用する
・5.3.11 デバイス変数プロパティ

第 5 章 制御プログラムの作成
6E8C4890 290
5.3.1 プログラムエディタの構成
■各部の名称と役割
タイトルバー
メニューバー
ツールアイコン
ステータスバー
モニタコントロール
テキストビュー
■ タイトルバー
ツールのアプリケーション名や、対象とするプロジェクトファイル名を表示します。
■ メニューバー
各種操作のためのメニューキーです。ALT+(Key)で、該当のメニューをマウスを使
用せず、メニューの内容を開くことができます。
■ ツールアイコン
よく使うメニューアイテムを、アイコンボタンで配置しています。アイコンが何を意味
しているのかは、マウスポインタをアイコンの上に置くと、そのメニュー名が表示され
ることで知ることができます。
■ モニタコントロール
テキストビューに表示されたプログラムのオンラインモニタを開始、停止するためのコ
ントロールです。

5.3 テキスト
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 291
■テキストビュー
テキスト言語(ST)を編集するビューです。
■ステータスバー
ステータスバーは以下の情報が表示されます。
・ カーソルポジション表示…行、列番号を表示します。
・ コントローラ運転モード表示…コントローラと接続している場合は、コントローラ
本体の運転モードを表示します。
・ 編集中表示…・プログラムエディタが編集中の場合に表示します。
・ カレンダ表示…現在日付け時刻を表示します。
5.3.2 タスクを開く
■ 起動
プログラムエディタの起動については、「5.2.2 タスクを開く」を参照してください。
■ タスクエントリの情報
タスクエントリの情報については、「5.2.2 タスクを開く」を参照してください。
■ プログラムエディタ画面(新規タスクエントリ)
タスクエントリよりプログラム名を入力して展開すると、編集できる状態になります。
プログラムの編集については、「5.3.3 プログラムを記述する」を参照してください。

第 5 章 制御プログラムの作成
6E8C4890 292
■ プログラムエディタ画面(既存タスクエントリ)
作成済みのタスクエントリを選択して展開した場合は、読み取り専用の状態で開きます。
編集するときは、メニュー<編集><編集する>をクリックします。プログラムの編集
については、「5.3.3 プログラムを記述する」を参照してください。
コントローラへ書き込む場合は、メニュー<ファイル><コントローラへ書込み>をク
リックします。コントローラの書込みについては、「7.3 タスクを個別にダウンロード
する」を参照してください。
■ 終了
プログラムエディタの終了については、「5.2.2 タスクを開く」を参照してください。
■ タスクエントリの実引数を登録する
タスクエントリの実引数の登録については、「5.2.2 タスクを開く」を参照してくださ
い。

5.3 テキスト
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 293
5.3.3 プログラムを記述する
ST(ストラクチャードテキスト)の入力、編集の仕方を説明します。
ST の文法については、「V シリーズの基礎知識」の「ストラクチャードテキスト(ST)」
を参照してください。
■ カーソルの操作
・ テキストビューをクリックすると、カーソルが登場します。
・ カーソルは、[←],[→],[↑],[↓]のキーで移動します。
・ カーソルの現在位置は、ステータスに行、列の番号で表示されます。
■ 編集を開始する
・ 編集を始めるには、メニュー<編集><編集する>を選択します。
・ もう一度、メニュー<編集><編集する>を選択すると、編集モードは解除されま
す。

第 5 章 制御プログラムの作成
6E8C4890 294
■プログラム記述の編集操作
・ プログラム記述に必要な編集操作を下表に示します。
操作 キー入力
カーソルをひとつ移動する [←],[→],[↑],[↓]
カーソルを左端または右端へ移動する [Home], [End]
ファンクションまたはファンクションブロックを選択する
ファンクションまたは、ファンクションブロックの名称を記述したい位置にカーソルを移動し、マウス右ボタンにて表示されるポップアップメニューの<ファンクション・ファンクションブロックの選択>を選択します。ファンクションまたは、ファンクションブロックを選択すると、選択したファンクション名または、ファンクションブロックの変数名が記述されます。
テキストをコピーする コピーしたいテキストの左上隅にカーソルをあわせ、[Shift]を押しながら[←],[→],[↑],[↓]で移動し、テキストを選択します。この状態で、[Ctrl]+[C]を押すと選択したテキストがコピーされます。マウス右ボタンにて表示されるポップアップメニューの<コピー>でも同様です。
テキストを切り取る 切り取りたいテキストの左上隅にカーソルをあわせ、[Shift]を押しながら[←],[→],[↑],[↓]で移動し、テキストを選択します。この状態で、[Ctrl]+[X]を押すと選択したテキストが切り取りされます。マウス右ボタンにて表示されるポップアップメニューの<切り取り>でも同様です。
テキストを貼り付ける コピー、切り取りしたテキストを貼り付けたい位置にカーソルを移動し、[Ctrl]+[V]を押します。マウス右ボタンにて表示されるポップアップメニューの<貼り付け>でも同様です。
テキストを削除する 削除したいテキストの左上隅にカーソルをあわせ、[Shift]を押しながら[←],[→],[↑],[↓]で移動し、テキストを選択します。この状態で、[Del]を押すと選択したテキストが削除されます。マウス右ボタンにて表示されるポップアップメニューの<削除>でも同様です。
編集を元に戻す メニュー<編集><元に戻す>を選択します。
直前に行った編集のみを一つ前に戻します。
マウス右ボタンにて表示されるポップアップメニューの<元に戻す>でも同様です。

5.3 テキスト
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 295
5.3.4 変数を入力する
■変数をドラッグ&ドロップする
・ 既に変数が宣言されている場合、変数画面から該当の変数をテキストビューの現在
のカーソル位置にドラッグ&ドロップすることができます。次の手順で行います。
1) テキストビューで、変数を入力したい位置にカーソルを移動します。
2) メニュー<編集><利用できる変数を開く>を選択し、変数画面を開きます。
3) 希望する変数名にマウスポインタを置き、左ボタンを押したまま、テキストビュー
にマウスポインタを移動し、ボタンを離します。このとき現在のカーソル位置に変
数名が入力されます。
Drag&Drop

第 5 章 制御プログラムの作成
6E8C4890 296
5.3.5 変数を宣言する
■ 変数宣言文を入力する
変数宣言文の入力については、「5.2.5 変数を宣言する」を参照してください。
■ 未定義変数の宣言
変数宣言は、[利用できる変数]で登録する他に、次の手順で行うことができます。
1) テキストビューに変数名を記述します。
2) 上書き保存の時、未定義の変数があれば未定義の変数ダイアログに表示されます。
3) 範囲、種類、データ型を選択してください。初期値、コメントは必要であれば入力
します。データ型はキー入力可能です。
ファンクションブロックの変数名の場合は、データ型にファンクションブロック名
をキー入力してください。
また、左端のチェックボックスを外すことで、該当の変数は登録から除外できます。
4) ボタン[登録]をクリックすると変数宣言されます。
5) 変数宣言の結果は、メニュー<編集><利用できる変数を開く>を選択して、[利
用できる変数]にて確認できます。
●注記
・ 呼び出し元のプログラムに影響を与えますので、必ず次の操作を行ってください。
・ ファンクションブロック内でローカル変数を追加、変更または削除した場合は、呼び出し元の
プログラムで、このファンクションブロックの変数を削除後、再登録してください。
・ ファンクション、ファンクションブロックの引数を変更した場合は、呼び出し元のプログラム
で、このファンクション、ファンクションブロックの命令シンボルを削除後、再描画してくだ
さい。

5.3 テキスト
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 297
5.3.6 ファンクションを使う
ここでは、[ファンクション・ファンクションブロックの選択]ダイアログからファ
ンクション名を入力する方法を説明します。
ファンクションの文法については、「V シリーズの基礎知識」の「ストラクチャード
テキスト(ST)」を参照してください。
■ファンクション名を入力する
・ テキストビューで、ファンクション名を入力したい位置にカーソルを移動します。
・ マウス右ボタンにて表示されるポップアップメニューの<ファンクション・ファン
クションブロックの選択>を選択します。
・ 下図ダイアログで、ファンクションを選択し、ボタン[選択]をクリックします。
・ カーソル位置にファンクション名が入力されます。

第 5 章 制御プログラムの作成
6E8C4890 298
5.3.7 ファンクションブロックを使う
ここでは、[ファンクション・ファンクションブロックの選択]ダイアログからファ
ンクションブロックの変数名を入力する方法を説明します。
ファンクションブロックの文法については、「V シリーズの基礎知識」の「ストラクチ
ャードテキスト(ST)」を参照してください。
■ファンクションブロックの変数名を入力する
・ ファンクションブロックの選択については、「5.3.6 ファンクションを使う」を参照
してください。
・ ファンクションブロックを選択すると、カーソル位置にファンクションブロックの
暗黙の変数名が入力されます。
■ファンクションブロックの変数を宣言する
・ ファンクションブロックの変数宣言については、「5.2.7 ファンクションブロック
を使う」を参照してください。
●重要
・ 同一プログラム内で、ファンクションブロックの変数名を重複して使用することは通常できま
せん。重複して使用した場合はプログラムが意図しない動作となることがあるため、プログラ
ム保存時にコンパイルエラーとしています。
・ 上記をご承知の上で、ファンクションブロックの変数名を重複して使用する必要がある場合は、
以下の方法にて設定を変更し、コンパイルエラーとならないようにすることができます。
なお、設定を変更した場合には、お客様の責任において、プログラムの動作テストの上、注意
してご使用いただく様にお願い致します。
<設定手順>
1) Windows ディレクトリ下のテキストファイル“Compile2.ini”をメモ帳で開き、[Compile]
の位置に下記のように設定します。
[Compile]
AllowDupFB = 1
既定値は、「AllowDupFB = 0」(ファンクションブロックの変数名を重複して使用しない)で
す。
上記以外の内容は変更しないでください。
2)上記の内容を変更した場合は、エンジニアリングツールを再起動してください。
C/S 版の場合には、プログラム保存を行う PC 毎に設定する必要があります。
また、一括コンパイルに適用する場合は、サーバ PC にて設定してください。

5.3 テキスト
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 299
5.3.8 変数を検索・置換する
プログラムエディタ(テキスト)において、一つのプログラム内の、変数名を検索し
たり、置換することができます。
■ 文字列を検索する
1) メニュー<編集><検索・置換>をクリックします。
2) <検索する文字列>で検索する文字を入力します。
3) 検索範囲として、<範囲><方向><比較>を適宜選択します。
<範囲> <ローカル>:現在フォーカスしているプログラム内を範囲とします。<コントローラ>:未サポート。
<方向> (ローカルの場合有効)
<上方向>:上方向に検索します。 <下方向>:下方向に検索します。
<比較> <検索文字と一致>:検索文字と一致する文字列を検索します。 <検索文字を含む>:検索文字を含む文字列を検索します。
4) ボタン[次を検索]を押します。
検索結果があれば、その場所にカーソルを移動します。
5) 検索結果が2つ以上あるとき、ボタン[次を検索]を押せば、その次の場所にカーソ
ルを移動します。
・ 比較で<検索文字を含む>にした場合、ワイルドカード検索を行なうことが出来ま
す。
文字パターン 一致する文字
? (半角) 任意の 1 文字
* (半角) 任意の数の文字
# (半角) 任意の 1 文字の数字 (半角)
・検索は、“語句“として検索します。次に検索の事例を示します。
検索文字列と 一致
検索文字を含む (ワイルドカード使用)
検索文字を含む (ワイルドカード使用)
検索する文字 “ ABCDE ” “ ABCDE* ” “ *ABCDE ”
検索される文字 “ ABCDE ” “ ABCDE ” , “ ABCDE[100] ” “ ABCDE ” , “ D.ABCDE ”
検索されない文字 “ ABCDE_1 ” “ AABCDEE ” “ DATA_ABCDEF “
■ 文字列を置換する
1) 編集モードにして、メニュー<編集><検索・置換>をクリックします。
2) 範囲を<ローカル>にします。
3) <検索する文字列>を入力します。
4) <置換後の文字列>を入力します。
5) ボタン[置換]を押すと検索結果にカーソルが移動し、置換後の文字列に置き換わ
ります。

第 5 章 制御プログラムの作成
6E8C4890 300
5.3.9 タスクを保存する
■ 上書き保存する
・ メニュー<ファイル><上書き保存>で、編集完了のプログラムを、コンパイルし
て保存します。
・ コンパイルでエラーがなければ、コンパイルを完了し、保存します。
・ コンパイルでエラーがあれば、エラーリストを表示するかどうかの確認メッセージ
が表示されます。
・ エラーリストがあると、メニュー<編集><コンパイルエラーリスト>が有効にな
りますので、こちらからも開くことができます。
・ エラーリストの例を下図に示します。
・ エラー個所を知るには、エラー箇所の行を選択して、ボタン[開く]を押します。そ
うすると、テキストビューの該当個所にカーソルが移動します。
・ エラーリストは、ボタン[印刷]で、印刷出力することができます。
・ コンパイラは複数のエラーを検出していますので、同じようなエラーが連続して表
示されることがあります。
○補足
・ プログラムの変更箇所だけが保存される“差分保存方式”を採用しているため、初回に比して
2回目以降は保存時間が短縮されます。
■ 一時的に保存する
・ メニュー<ファイル><一時保存>で、現在編集中のプログラムを、コンパイルし
ないで保存します。
・ 編集の途中や、コンパイルエラーを認識している場合などで、一時的に保存したい
ときに使用します。

5.3 テキスト
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 301
■ コンパイルエラーメッセージ一覧
コンパイルエラーメッセージの一覧は以下のとおりです。
エラーリストのエラーNo.の下3桁を参照してください。
No. コンパイルエラーメッセージ 説明
300 コメントの終端'*)'がありません。 コメントの始まり'(*'に対応する終端'*)'の記述がありません。
301 整数表記に誤りがあります。 整数表記内のアンダースコアに続く文字が数字および、識別子ではありません。 数値の範囲が倍精度整数を超えています。
302 2 進数表記に誤りがあります。 '2#'の次の文字が 2 進数ではありません。アンダースコアの次の文字が 2 進数ではありません。 数値の範囲が 32 ビットを超えています。
303 8 進数表記に誤りがあります。 '8#'の次の文字が 8 進数ではありません。アンダースコアの次の文字が 8 進数ではありません。 数値の範囲が 32 ビットを超えています。
304 16 進数表記に誤りがあります。 '16#の'次の文字が 16 進数ではありません。アンダースコアの次の文字が 16 進数ではありません。 数値の範囲が 32 ビットを超えています。
305 実数表記に誤りがあります。 小数点以下の表記が実数表記ではありません。
306 TIME 型の表記に誤りがあります。 'T#'、'TIME#'に続く表記が TIME 型の表記ではありません。
307 TIME_OF_DAY 型の表記に誤りがあります。 'TOD#'、'TIME_OF_DAY#'に続く表記がTIME_OF_DAY 型の表記ではありません。
308 DATE 型の表記に誤りがあります。 'D#'、'DATE#'に続く表記が DATE 型の表記ではありません。
309 DATE_AND_TIME 型の表記に誤りがあります。
'DT#'、'DATE_AND_TIME#'に続く表記がDATE_AND_TIME 型の表記ではありません。
310 CASE 文の比較データの表記に誤りがあります。 CASE 文の(比較データ)表記の'..'に続く表記が整数ではありません。
312 識別子表記に誤りがあります。 識別子内の先頭のアンダースコアに続く表記が文字および数字ではありません。
313 直接表記変数の表記に誤りがあります。 '%'に続く直接表記変数の表記に誤りがあります。
330 文の終わりにセミコロン';'がありません。 代入文等の文の末尾にセミコロン';'が記述されていません。
332 '('に対応する')'がありません。 '('の記述に対応する')'の記述がありません。
334 '['に対応する']'がありません。 '['の記述に対応する']'の記述がありません。
335 CASE 文の比較データの':'がありません。 CASE 文の(比較データ)の区切りを示す':'の記述がありません。
336 変数のメンバー名がありません。 変数の構造体を表す'.'に続く文字列がありません。
337 代入文の':=' がありません。 文の先頭の変数または、FOR 文内のインデックス変数の次に':='の記述がありません。
338 IF 文の'THEN'がありません。 IF 文の(条件式)に続く'THEN'の記述がありません。
339 IF 文の 後に'END_IF'がありません。 IF 文の 後に'END_IF'の記述がありません。
340 CASE 文の'OF'がありません。 CASE 文のインデックス変数に続く'OF'の記述がありません。
341 CASE 文の 後に'END_CASE'がありません。 CASE 文の 後に'END_CASE'の記述がありません。
342 FOR 文の'TO'がありません。 FOR 文の(初期値)と( 終値)の間の'TO'の記述がありません。
343 FOR 文、WHILE 文の'DO'がありません。 FOR 文または、WHILE 文の先頭行の 後に'DO'の記述がありません。
344 FOR 文の 後に'END_FOR'がありません。 FOR 文の 後に'END_FOR'の記述がありません。

第 5 章 制御プログラムの作成
6E8C4890 302
No. コンパイルエラーメッセージ 説明
345 WHILE 文の 後に'END_WHILE'がありません。WHILE 文の 後に'END_WHILE'の記述がありません。
346 REPEAT 文の'UNTIL'がありません。 REPEAT 文の(条件式)の前に'UNTIL'の記述がありません。
347 REPEAT 文の 後に'END_REPEAT'がありません。
REPEAT 文の 後に'END_REPEAT'の記述がありません。
348 文が不正です。 文の先頭が代入文の変数名、FUN 名、FBK 変数名または、構文ではありません。
349 CASE 文の比較データが整数表記で記述されていません。
CASE 文の(比較データ)が整数表記ではありません。または、(比較データ)の記述がありません。
350 式が不正です。 構文の(条件式)または、代入文の右辺に変数、定数、FUN 名以外の文字列が記述されています。
351 配列の添え字が整数またはインデックス変数ではありません。
配列の添字に整数または、インデックス変数が記述されていません。
352 CASE 文、FOR 文にインデックス変数が指定されていません。
CASE 文の‘CASE’または、FOR 文の’FOR’の次にインデックス変数が記述されていません。
353 EXIT 文を FOR 文、WHILE 文、または REPEAT文の外で指定しています。
EXIT 文が FOR 文、WHILE 文、REPEAT 文のループ内に記述されていません。
354 変数の表記に誤りがあります。 ポインタ表記変数の変数名が宣言されていません。
355 直接表記変数のワードアドレス指定がメモリ配置規則に違反しています。
直接表記変数の’%D’、’%F’のワード No.指定が偶数ではありません。
356 配列の添字表記に誤りがあります。配列の範囲内の整数値か、インデックス変数を指定してください。
配列の添字が 65535 を超えています。
357 ポインタ表記変数の{データ型}に誤りがあります。基本型を指定してください。
ポインタ表記変数の{データ型}の指定が基本型ではありません。
358 ポインタ表記変数の変数宣言のデータ型が'PTR'、'PTRB'ではありません。
ポインタ表記変数の変数宣言のデータ型が'PTR'または、'PTRB'で宣言されていません。
359 ポインタ表記変数の{データ型}と変数宣言のデータ型の整合性がありません。
変数宣言のデータ型が'PTRB'であるのに対し、ポインタ表記変数の{データ型}が'BOOL'以外で記述されています。
360 変数が未定義です。 変数が宣言されていません。
361 直接表記変数のワードアドレスの指定が範囲外です。 直接表記変数のワード No.が 4M ワート(゙ステーション変数領域の大)を超えています。
362 一括入出力禁止の変数です。 直接入出力しかない I/O の I/O 変数の 後にアンダースコアが記述されていません。
363 ポインタ表記変数の表記が不正です。 ポインタ変数表記の'{'の記述に対応する'}'の記述がありません。
364 ファンクション、ファンクションブロックが登録されていません。 該当のファンクションまたは、ファンクションブロックが POU エントリに登録されていません。
365 ファンクション、ファンクションブロックがコンパイルされていません。該当のファンクションまたは、ファンクションブロックがコンパイルされていません。
366 ファンクションの戻り値が定義されていません。 ユーザ定義ファンクション内の変数宣言に'FUNCTION'の宣言がありません。
367 ファンクションの戻り値が代入されていません。 戻り値が基本型(4 バイト以下)のファンクションコール文が文の先頭に記述されています。
368 ファンクションの戻り値は代入できません。 戻り値がポインタ扱い(4 バイトより大きい)のファンクションコール文が代入文の右辺または、構文の(条件式)に記述されています。
369 ファンクションの戻り値は POU 名として定義してください。
ユーザ定義ファンクション内の'FUNCTION'宣言の変数名が該当ファンクションの POU 名ではありません。
370 データ型が一致しないか、そのデータ型で演算できません。
演算子の両側のデータ型に対応する、その演算子の命令語がありません。
371 ファンクション、ファンクションブロックの引数の数が一致していません。
ファンクションまたは、ファンクションブロックの実引数の数が仮引数の数と一致していません。

5.3 テキスト
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 303
No. コンパイルエラーメッセージ 説明
372 ファンクション、ファンクションブロックの引数のデータ型が一致しません。
ファンクションまたは、ファンクションブロックの実引数のデータ型が仮引数のデータ型と一致していません。
373 代入文のデータ型が一致していません。 代入文の左辺と右辺のデータ型が一致していません。
374 ポインタ扱いとなる変数に代入できません。 ポインタ扱いとなる変数が代入文の左辺に記述されています。
375 IF 文、FOR 文、WHILE 文、REPEAT 文の条件式のデータ型に誤りがあります。
IF,WHILE,REPEAT 文の(条件式)または、FOR 文の(初期値),( 終値),(増分)のデータ型が規定と異なります。 IF,WHILE,REPEAT 文の(条件式)は BOOL 型。FOR文の(初期値),( 終値),(増分)は INT または DINT型。
376 FOR 文の MIN,MAX,STEP の表記に誤りがあります。
FOR 文の(初期値),( 終値),(増分)に変数または、定数が記述されていません。
377 ファンクションブロック変数が重複してコールされています。 ファンクションブロック変数('TON_1'等)のコール文が重複して記述されています。
378 配列要素のビットサイズが 65535 ビットを超えるためインデックス修飾できません。
配列の添字がインデックス変数のとき、配列 1 要素のビットサイズが 65535 ビットを超えています。
379 配列要素のワードサイズが 65535 ワードを超えるためインデックス修飾できません。
配列の添字がインデックス変数のとき、配列 1 要素のワードサイズが 65535 ワードを超えています。
380 ビット演算命令は 1M ワードを越えるアドレスにアクセスできません。
BOOL 型変数または直接表記変数(ビット)のワード No.が 1M ワードを越えています。
381 非ビット演算命令は 16M ワードを越えるアドレスにアクセスできません。
非 BOOL 型変数のワード No.が 16M ワードを越えています。
382 プログラムのサイズが、 大サイズ(4KStep)を越えました。
コンパイル結果のプログラムのサイズが、4KStep を越えています。

第 5 章 制御プログラムの作成
6E8C4890 304
5.3.10 クロスリファレンスを利用する
クロスリファレンスとは、変数が、どのステーションの、どのコントローラの、どの
タスク(プログラム)で参照、または代入されているのかを示すものです。
これは、プログラムが期待しない動作であるとき、データの発生場所を調べたり、逆
にデータの利用個所を調べたりするのに大変役に立ちます。
■ クロスリファレンスリストを表示する
1) タスクエントリからプログラムエディタ(テキスト)を開きます。
2) プログラムがコンパイル済みであるとき、検索する変数を選択し、メニュー<編集
><クロスリファレンスリスト>を選択します。マウスの右クリックメニューの<
クロスリファレンスリスト>でも可能です。
3) 画面が表示され自動的に検索が開始されます。
また、2)で変数を選択しないままで画面を表示した場合などは、以下の手順で検索す
ることもできます。
1)検索するデバイス変数名を入力します。
” ABC “のように変数名を直接指定したり、” ABC*” , “ ?ABC ”のようにワイルドカ
ードを使って、間接的に指定すれば、その名前規則に合致する変数名だけのクロス
リファレンスを表示することができます。あいまい検索は以下のように“*”や“?”
を入力することで行えます。
例 1) *_J5, CBM_*, CBM.* :*は任意の複数文字
例 2) CBM_?1, C?0, ABC[?] :?は任意の1文字
入力したデバイス変数名の条件に完全一致した(部分一致ではない)デバイス変数
に対してリファレンスを表示します。
2) ボタン[検索]をクリックします。

5.3 テキスト
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 305
各項目の意味は以下のとおりです。
○補足
・ 下表はジャンプ先がテキストの場合です。ジャンプ先のプログラムエディタがフルグラフィッ
ク/セミグラフィックの場合は、それぞれの説明を参照してください。
・ エンジニアリングツールのバージョンによっては、表示項目が少ない場合があります。
・ エンジニアリングツールのバージョンによっては、1 台の PC でクロスリファレンス検索ウィン
ドウを 大 20 個まで表示することができます。
項目名 検索結果
S 起動元の 1 箇所のみに”*”を表示します。
変数名 検索されたデバイス変数名
ステーション ステーション名
スロット No. メインモジュールのスロット No.
タスク 変数が参照、代入されているタスク
エントリ No. タスクエントリ No.
POU 名 プログラム名
アクション/フェーズ 空白
ページ/シート No. 1 固定
行 ページ上の行
列 ページ上の列
参照 LD、ST
■ プログラムを開く
クロスリファレンスリストに示された位置(ステーション/スロット/タスク)のプロ
グラムを開くには、次の手順で行います。
1) クロスリファレンスリストの注目する行をクリックします。
2) ボタン[開く]をクリックします。
プログラムエディタが開かれ、この行で指定された位置にカーソルが移動します。
オンライン/オフライン状態は、ジャンプ先で呼び出し状態を継続します。
○補足
・ ジャンプ先がファンクションブロック/ファンクションの命令シンボルの場合、プログラムエ
ディタを開きますが、カーソルはその位置を指しません。
これは、検索した変数名がその位置に実在しないためです。
この場合は、検索結果の行・列を参照し、命令シンボルを特定してください。
・ ジャンプ先がファンクションブロック/ファンクション内の場合、ライブラリ起動と同じ状態
で開きます。
つまり、必ずオフライン状態で開きます。

第 5 章 制御プログラムの作成
6E8C4890 306
5.3.11 デバイス変数プロパティ
プログラムで使用しているデバイス変数の属性を表示することができます。
■ 制約事項
デバイス変数プロパティの表示中に、表示内容に該当する項目が、他のアプリケーショ
ンや他のユーザにより、変更された場合でも、表示内容の自動リフレッシュは行ないま
せん。
一旦デバイス変数プロパティ画面を閉じてから、再度表示してください。
■ デバイス変数プロパティを開く
1) テキストビュー上において、属性を表示したい変数を選択し、メニュー<表示><
デバイス変数のプロパティ>を選択します。マウスの右クリックメニューの<デバ
イス変数のプロパティ>でも同様です。

5.3 テキスト
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 307
・表示項目
表示項目については、「5.2.13 デバイス変数プロパティ」を参照してください。

第 5 章 制御プログラムの作成
6E8C4890 308
5.4 フルグラフィック
ここでは、「プログラムエディタ(フルグラフィック)」で LD(ラダー・ダイヤグラ
ム)/FBD(ファンクション・ブロック・ダイヤグラム)/SFC(シーケンシャル・フ
ァンクション・チャート)の制御プログラムを作成するときの操作を説明します。以下
では、次の内容を説明します。
エンジニアリングツール2ではサポートしていません。
・5.4.1 プログラムエディタの構成
・5.4.2 タスクを開く
・5.4.3 プログラムを描画する
・5.4.4 変数を入力する
・5.4.5 変数を宣言する
・5.4.6 ファンクションを使う
・5.4.7 ファンクションブロックを使う
・5.4.8 変数や命令語を検索・置換する
・5.4.9 さまざまな編集・表示機能
・5.4.10 タスクを保存する
・5.4.11 データ型・命令語の実行順序を表示する
・5.4.12 クロスリファレンスを利用する
・5.4.13 デバイス変数プロパティ
・5.4.14 不定型ファンクション命令を利用する
・5.4.15 命令語の実行順序を変更する
・5.4.16 タブ機能を利用する
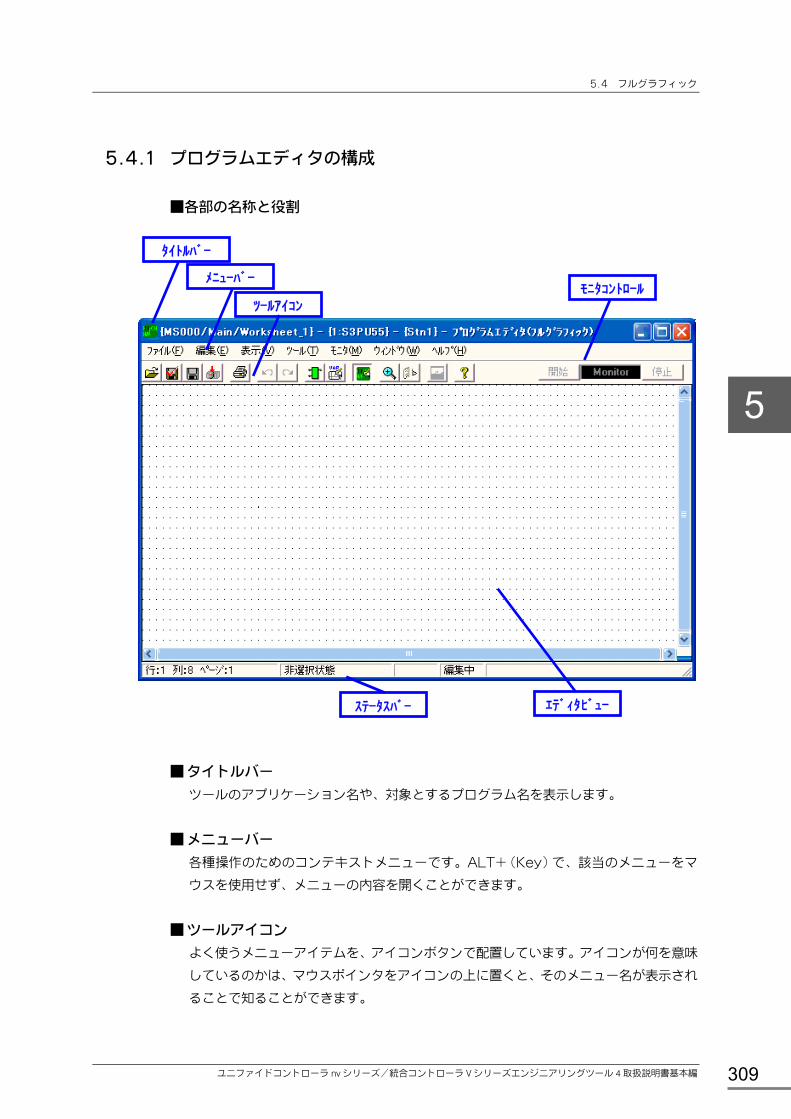
5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 309
5.4.1 プログラムエディタの構成
■各部の名称と役割
タイトルバー
メニューバー
ツールアイコンモニタコントロール
ステータスバー エディタビュー
■ タイトルバー
ツールのアプリケーション名や、対象とするプログラム名を表示します。
■ メニューバー
各種操作のためのコンテキストメニューです。ALT+(Key)で、該当のメニューをマ
ウスを使用せず、メニューの内容を開くことができます。
■ ツールアイコン
よく使うメニューアイテムを、アイコンボタンで配置しています。アイコンが何を意味
しているのかは、マウスポインタをアイコンの上に置くと、そのメニュー名が表示され
ることで知ることができます。

第 5 章 制御プログラムの作成
6E8C4890 310
■ モニタコントロール
メニュービューに表示されたグラフィック言語のオンラインモニタを開始、停止するた
めのコントロールです。
■ エディタビュー
グラフィカル言語(LD/FBD/SFC)をフルグラフィックで描画、編集するビューです。
プログラム、ファンクションブロック、ファンクションで使います。
■ ステータスバー
ステータスバーは以下の情報が表示されます。
・カーソルポジション表示…ページ、行番号、列番号を表示します。
・状態表示…プログラムエディタの編集状態を表示します。
・カレンダ表示…現在の日付と時刻を表示します。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 311
5.4.2 タスクを開く
■ 起動
・ プログラムエディタの起動は、以下の手順で行います。
1) [プロダクトツリー]の該当するステーション、ユニット、モジュールを選び、モジ
ュール内のタスクを選択します。

第 5 章 制御プログラムの作成
6E8C4890 312
2) メニュー<ファイル><タスクエントリ>を実行します。
以下のタスクエントリ画面が展開されます。
3) 新規にタスクを作成する場合は、「プログラム名」を入力し、種別を<フルグラフィ
ック>に選択して、該当するタスクエントリNo.にカーソルを合わせて、「プログ
ラムエディタを開く」ボタンを押します。
既に作成済みのタスクを開く場合は、該当するタスクエントリ No.にカーソルを合
わせて、[プログラムエディタを開く]ボタンを押します。
また、いずれも、カーソルを合わせた箇所でダブルクリックしても起動します。
■タスクエントリの情報
タスクエントリ画面では、タスクにエントリしたプログラムに関する情報を登録・表示
することができます。
以下では、それらの情報について説明します。
「生成済」:
プログラムをコントローラへダウンロードして実行するために必要な、プログラムのデ
ータおよびコードバイナリの生成状態を示します。
・Yes: 該当のプログラム、およびそのプログラムから呼び出しているユーザファン
クションやユーザファンクションブロックを含む、全ての POU で上書き保存(コンパ
イル)が完了し、コンパイルエラーが無い状態です。
・No: 上書き保存(コンパイル)をしていないか、コンパイルエラーが有る状態です。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 313
「更新日付」:
プログラムの内容を更新した日付です。ここで、プログラムの更新とは具体的には次の
操作を実行することを指します。プログラムの<一時保存>、<上書き保存>、<保存
とダウンロード>、<一括コンパイル>。
○補足
・ V-Tool3 の Ver3.3.0 以降で作成したワークシートを、それ未満のバージョンで表示した場
合、・該当のプログラムから呼び出しているユーザファンクションやユーザファンクションブロ
ックを更新しただけでは更新日付は変更されません。
「ステップ数」:
プログラムのコードバイナリのサイズです。「生成済」が Yes のときにそのサイズを表
示し、No のときには 0(ゼロ)を表示します。
■ プログラムエディタ画面(新しいタスクエントリを開いたとき)
タスクエントリより新規タスクを作成して展開すると、編集できるようになります。
プログラムの編集については、「5.4.3 プログラムを描画する」を参照してくださ
い。

第 5 章 制御プログラムの作成
6E8C4890 314
■ プログラムエディタ画面(既存のタスクエントリを開いたとき)
作成済みのタスクを選択して展開した場合は、読み取り専用の状態で開きます。
編集するときは、メニュー<編集><編集する>を実行します。プログラムの編集につ
いては、「5.4.3 プログラムを描画する」を参照してください。
■ 終了
・ プログラムエディタを終了するには、次の方法があります。
1) メニュー<ファイル><終了>を実行します。
2) タイトルバー右端の[×]をクリックします。
3) タイトルバー左端のアイコンをダブルクリックします。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 315
■ タスクエントリの実引数を登録する
プログラムに引数(VAR_INPUT,VAR_IN_OUT,VAR_OUTPUT)を設けた場合、
実引数としてそのコントローラからアクセスできるグローバル変数を与える必要があ
ります。
以下にその手順を説明します。
1) タスクエントリ画面にて、[実引数の登録]ボタンを押します。
2) タスクエントリ引数画面が表示されます。
3) プログラムの仮引数に与えるグローバル変数を入力します。仮引数の表示順に合わ
せて、「実引数」にグローバル変数を入力してください。「No.」の値を変更すると、
実引数の順番を変更することができます。

第 5 章 制御プログラムの作成
6E8C4890 316
5.4.3 プログラムを描画する
LD(ラダー・ダイヤグラム)/FBD(ファンクション・ブロック・ダイヤグラム)/SFC
(シーケンシャル・ファンクション・チャート)の入力、編集の仕方を説明します。
■ ドローイングカーソルの操作
・ エディタビュ-の空き領域をクリックすると、ドローイングカーソルが登場します。
■ 編集を開始する
・ 編集を始めるには、メニュー<編集><編集可能>を実行するか下記のツールアイ
コンをクリックしてください。
・ もう一度、メニュー<編集><編集可能>を実行するか下記のツールアイコンをク
リックすれば、編集禁止になります。
■ 命令シンボルの描画
・ エディタビューにカーソルを置きます。
・ メニュー<編集><利用できるファンクション>を実行すると[利用できるファン
クション]が表示されます。命令シンボルのアイコンをクリックするかファンクシ
ョンのリストをダブルクリックするとカーソル位置に描画されます。
・ 接点、コイル、ファンクションブロック、ゲート、入出力変数、ステップ、トラン
ジションのように変数名の指定が必要な命令シンボルは、暗黙の変数名が自動的に
表示されます。
・ 命令シンボルを削除するには、命令シンボルにフォーカス後、[DEL]キーを押すか、
またはメニュー<編集><削除>で行います。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 317
命令シンボルアイコン
ファンクションのリスト

第 5 章 制御プログラムの作成
6E8C4890 318
■ 命令シンボルの連続描画
命令シンボルを選択後、[利用できるファンクション]上で選択可能となっているアイ
コンをクリックします。
選択していた命令シンボルに対してアイコンにて指定した方向に新たに命令語シンボ
ルが描画されます。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 319
■ 命令シンボルの変更
命令シンボルを選択後、 をクリックします。
一回選択する毎に、命令シンボルが切り替わり、 後までいくと先頭の命令シンボルに
戻ります。

第 5 章 制御プログラムの作成
6E8C4890 320
命令シンボルが切り替わる内容と順序は、以下のとおりです。
命令シンボル アイコン
初期状態 1 回目 2 回目 3 回目 4 回目 5 回目
―| |―
―| |― A 接点
―|/|― B 接点
―|P|― 立ち上がり 接点
―|N|― 立ち下がり 接点
- -
―|↑|―
―|↑|― 立ち上がり エッジ検出
―| I |― インバータ
―|↓|― 立ち下がり エッジ検出
- - -
―( )―||
―( )―||コイル
―(/)―||反転コイル
―(S)―||セットコイル
―(R)―||リセットコイル
―(P)―|| 立ち上がり コイル
―(N)―||立ち下がり コイル
―|| ||―
―|| ||― A 接点ゲート
―||/||― B 接点ゲート
- - - -
-V1 ―V1 出力変数
―>V1 出力変数セット
- - - -
-[MC]-|
-[MCS] マスターコントロールセット
-[MCR] マスターコントロールリセット
- - - -
-[JC]-|
-[JCS] ジャンプコントロールセット
-[JCR] ジャンプコントロールリセット
- - - -
IF
IF 構造文要素
THEN 構造文要素
ELSEIF 構造文要素
ELSE 構造文要素
END_IF 構造文要素
-
CAS
CASE INDEX 構造文要素 (CASE)
, 構造文要素 (ENUM)
: 構造文要素 (ENUM_END)
.. , 構造文要素 (RANGE)
.. : 構造文要素 (RANGE_END)
END_CASE 構造文要素 (END_CASE)
FOR FOR_DO INDEX MIN MAX STEP 構造文要素
END_FOR 構造文要素
- - -
REP REPEAT 構造文要素
UNTIL 構造文要素
END_REPEAT 構造文要素
- - -
WHL
WHILE 構造文要素
DO 構造文要素
END_WHILE構造文要素
- - -
No. フェーズステップ フェーズステップ 2 - - - -
ANS アンサステップ アンサステップ 2 - - - -

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 321
■ 変数の自動発生
命令シンボルの入力端子または、出力端子付近をダブルクリックすると、入力変数また
は、出力変数が自動発生します。
新入力変数または、新出力変数を自動発生させる場合は、メニュー<ツール><新変数
シンボルを自動接続>にチェックを付けてください。
■ 端子間の接続
入出力端子の結線可能(カーソルが”+”となる)位置でクリックします。
+
接続先の結線可能(カーソルが”+”となる)位置でクリックします。
+

第 5 章 制御プログラムの作成
6E8C4890 322
■結線の削除
結線中にダブルクリックするとそれまで引いていた結線が削除されます。
結線済みであれば、結線を選択後、Delete キーを押します。
■命令シンボル移動時の結線の移動
命令シンボルを選択後、移動すると結線も移動します。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 323
■結線途中から端子への結線
接続したい結線の付近にマウスカーソルを運び、Ctrl キーを押しながらマウスの左ボタ
ンをクリックすると結線を開始します。
+
その後は、Ctrl キーを離して希望する結線経路の折れ点でマウスの左ボタンをクリック
します。
後に、結線可能な終点(+マーク)でマウスの左ボタンをクリックすると結線が完了
します。
+
■ 命令シンボルの選択
○補足
・ここで説明している方法は Ver.4.2.0、Ver.3.10.0 以降でご利用いただけます。それ以前の
バージョンでは、命令シンボル全体を広く囲む必要があります。また、命令シンボルの不可視
部のクリックでも選択できる場合があります。
[命令シンボルをクリックして選択する]
変数名の領域、または命令シンボルの図(可視部)をクリックします。
選択可能エリアにカーソルが入ると、カーソルが以下の形となり、選択可能であること
を示します。
・変数名の領域内
・命令シンボルの図
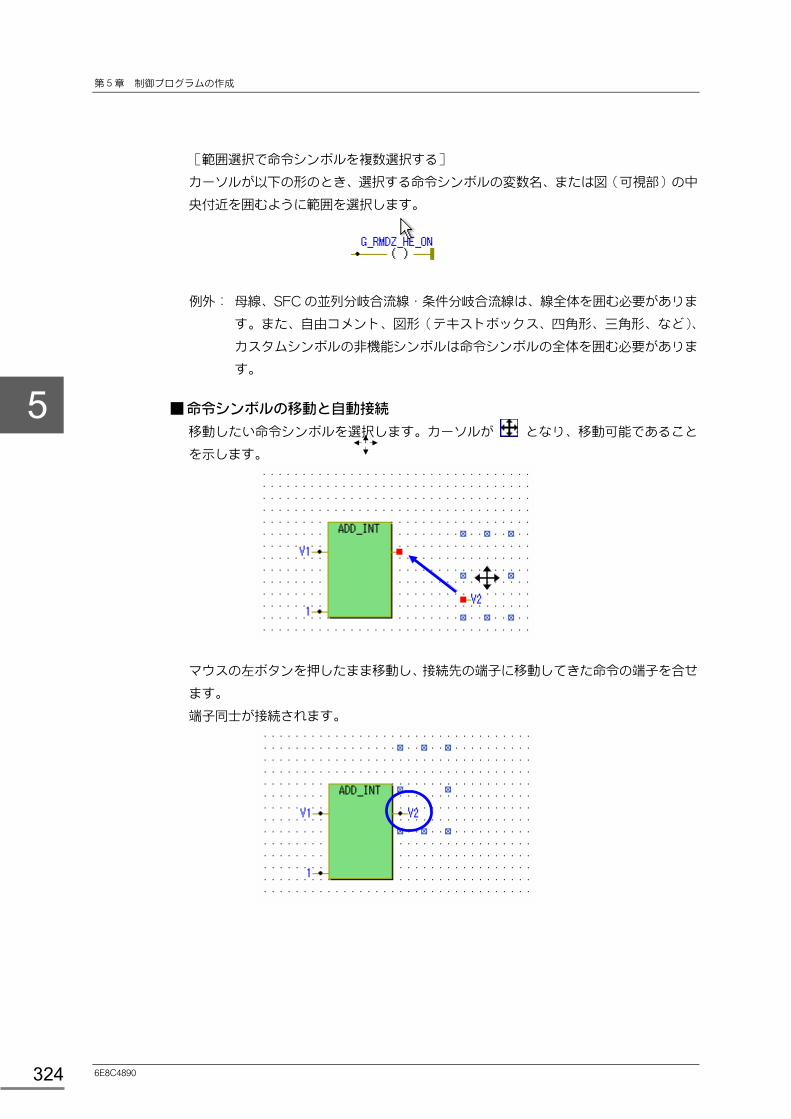
第 5 章 制御プログラムの作成
6E8C4890 324
[範囲選択で命令シンボルを複数選択する]
カーソルが以下の形のとき、選択する命令シンボルの変数名、または図(可視部)の中
央付近を囲むように範囲を選択します。
例外: 母線、SFC の並列分岐合流線・条件分岐合流線は、線全体を囲む必要がありま
す。また、自由コメント、図形(テキストボックス、四角形、三角形、など)、
カスタムシンボルの非機能シンボルは命令シンボルの全体を囲む必要がありま
す。
■ 命令シンボルの移動と自動接続
移動したい命令シンボルを選択します。カーソルが となり、移動可能であること
を示します。
マウスの左ボタンを押したまま移動し、接続先の端子に移動してきた命令の端子を合せ
ます。
端子同士が接続されます。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 325
■ 中間線分の移動
中間線分は、周りの結線状態を変えずに位置を移動することができます。
中間線分を選択すると灰色になります。
マウスの左ボタンを押したまま、移動し、希望する位置でボタンを離します。
■ 命令シンボルサイズの変更
描画した命令シンボルの幅と端子間隔を変更する事ができます。
命令シンボルを選択後、サイズ変更ボタンを押します。6 段階切り替える事ができます。
変更された幅と端子間隔は記憶され、次回以降も有効になります。
拡大ボタン 縮小ボタン
下記は、 大サイズから 小サイズに変更した場合です。
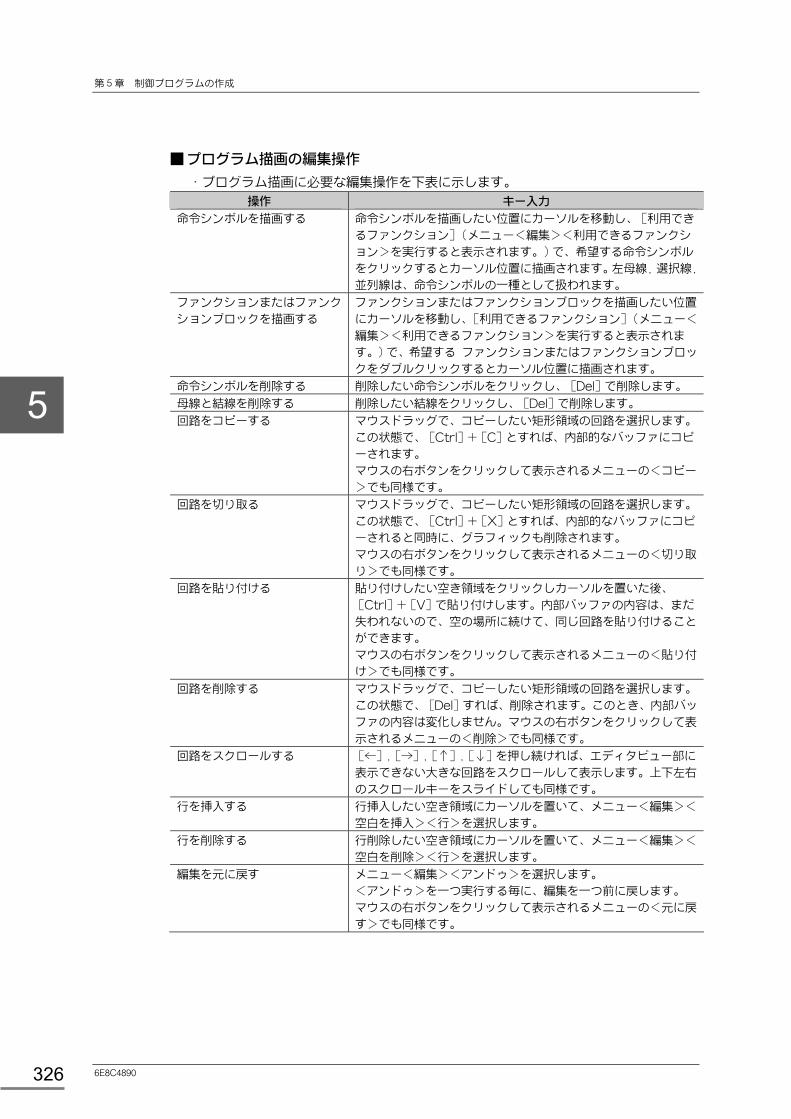
第 5 章 制御プログラムの作成
6E8C4890 326
■ プログラム描画の編集操作
・プログラム描画に必要な編集操作を下表に示します。
操作 キー入力
命令シンボルを描画する 命令シンボルを描画したい位置にカーソルを移動し、[利用できるファンクション](メニュー<編集><利用できるファンクション>を実行すると表示されます。)で、希望する命令シンボルをクリックするとカーソル位置に描画されます。左母線,選択線,並列線は、命令シンボルの一種として扱われます。
ファンクションまたはファンクションブロックを描画する
ファンクションまたはファンクションブロックを描画したい位置にカーソルを移動し、[利用できるファンクション](メニュー<編集><利用できるファンクション>を実行すると表示されます。)で、希望する ファンクションまたはファンクションブロックをダブルクリックするとカーソル位置に描画されます。
命令シンボルを削除する 削除したい命令シンボルをクリックし、[Del]で削除します。
母線と結線を削除する 削除したい結線をクリックし、[Del]で削除します。
回路をコピーする マウスドラッグで、コピーしたい矩形領域の回路を選択します。この状態で、[Ctrl]+[C]とすれば、内部的なバッファにコピーされます。 マウスの右ボタンをクリックして表示されるメニューの<コピー>でも同様です。
回路を切り取る マウスドラッグで、コピーしたい矩形領域の回路を選択します。この状態で、[Ctrl]+[X]とすれば、内部的なバッファにコピーされると同時に、グラフィックも削除されます。 マウスの右ボタンをクリックして表示されるメニューの<切り取り>でも同様です。
回路を貼り付ける 貼り付けしたい空き領域をクリックしカーソルを置いた後、[Ctrl]+[V]で貼り付けします。内部バッファの内容は、まだ失われないので、空の場所に続けて、同じ回路を貼り付けることができます。 マウスの右ボタンをクリックして表示されるメニューの<貼り付け>でも同様です。
回路を削除する マウスドラッグで、コピーしたい矩形領域の回路を選択します。この状態で、[Del]すれば、削除されます。このとき、内部バッファの内容は変化しません。マウスの右ボタンをクリックして表示されるメニューの<削除>でも同様です。
回路をスクロールする [←],[→],[↑],[↓]を押し続ければ、エディタビュー部に表示できない大きな回路をスクロールして表示します。上下左右のスクロールキーをスライドしても同様です。
行を挿入する 行挿入したい空き領域にカーソルを置いて、メニュー<編集><空白を挿入><行>を選択します。
行を削除する 行削除したい空き領域にカーソルを置いて、メニュー<編集><空白を削除><行>を選択します。
編集を元に戻す メニュー<編集><アンドゥ>を選択します。
<アンドゥ>を一つ実行する毎に、編集を一つ前に戻します。
マウスの右ボタンをクリックして表示されるメニューの<元に戻す>でも同様です。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 327
5.4.4 変数を入力する
■ 変数名のキー入力
・ 命令シンボルの変数名をクリックします。下図に示すように、テキストボックスが
登場するので、変数名をキー入力し、[Enter]すればテキストボックスは消えて、
命令シンボル上に描画されます。テキストボックスは、右下をドラッグして大きく
することが可能です。
・ 一般に、命令シンボルをすべて入力、描画してから、変数名を入力したほうが、効
率がいいでしょう。
■ 変数をドラッグ&ドロップする
・ 既に、変数が宣言されているのであれば、その変数の表を表示しておいて、そこか
ら変数を命令シンボルにドラッグ&ドロップすることができます。次の手順で行い
ます。
1) メニュー<編集><利用できる変数>を実行し、[変数]画面を開きます。
2) 希望する変数名にマウスポインタを置き、左ボタンを押したまま、変数を入力した
い命令語までマウスポインタを移動し、ボタンを離します。このとき命令シンボル
に対して変数名が入力されます。
Drag&Drop

第 5 章 制御プログラムの作成
6E8C4890 328
■暗黙の変数名を変更する
・ 命令シンボルのうち、接点、コイル、入力変数、出力変数、入出力変数、ファンク
ションブロック、ステップ、トランジションなどは、命令シンボルを描画したとき、
暗黙の変数名を自動的に表示します。
・ これは、メニュー<ツール><暗黙の変数名>で、下記ダイアログで変更すること
ができます。
・ 基底名は変数名の一部ですから、変数名の約束に従って、設定してください。
5.4.5 変数を宣言する
■ 変数を登録する
・ 変数は、以下の手順で登録できます。
1) メニュー<編集><利用できる変数>を実行して、ダイアログ[利用できる変数]を
表示します。このとき、既存の変数宣言があれば、表形式で表示されます。
2) アスタリスク(*)のマークのある行にフォーカスを移動して、[変数],[データ
型],[コメント],[宣言種別],[読出専用],[宣言順]の項目を設定します。
■ 編集ロック
起動時は編集ロック(登録内容の変更・削除不可)状態になっています。
既存登録の入力操作を行う場合には、編集ロックを解除してください。
なお、追加行(左端の列に'*'がついている行)による追加は、いつでも可能です。
●重要
・ 呼び出し元のプログラムに影響を与えますので、必ず次の操作を行ってください。
・ ローカル変数を追加または削除した場合は、呼び出し元のプログラムで、このファンクション
ブロックの変数を削除後、再登録してください。
・ 引数を変更した場合は、呼び出し元のプログラムで、このファンクションブロックの命令シン
ボルを削除後、再描画してください。
また、変数宣言を変更または削除すると、これを参照するプログラムに影響を与えることがあ
るので注意してください。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 329
●注記
・ ローカル変数の登録
プログラムをダウンロードしたときコントローラでの値の継続性を保つようにするために、登
録の変更・削除時には以下のように動作します。
1)変数宣言においてローカル変数を削除しても、その時点でパッキング処理(空きアドレス領
域が無いように先頭からの再割付け)は行いません。削除した後、宣言順を入力せずに新規
に追加すると、削除した所には割り付けず、後置追加されます。
2)変数宣言においてローカル変数のデータ型を変更した時には、その変数を一旦削除し、後置
追加した時と同じ処理になります。
3)1),2)操作を繰り返していくと割付が可能な空きアドレスが無くなり、ローカル変数が登録
できなくなることがあります。このときは、一括コンパイルを実行するか、既に登録してい
る変数の宣言順を変更してください。パッキング処理され、登録が可能となります。
・ コントローラ変数の登録
エンジニアリングをより安全におこなっていただくために、登録の変更・削除時には以下のよ
うに動作します。
1)変数宣言においてコントローラ変数を削除しても、その後削除したアドレスには自動割付さ
れません。
2)変数宣言においてコントローラ変数のデータ型を変更しても、その後変更前のアドレスには
自動割付されません。
3)変数宣言においてコントローラ変数のアドレスを変更しても、その後変更前のアドレスには
自動割付されません。
4)1)~3)操作を繰り返していくとコントローラ変数が登録できなくなることがあります。こ
のときは、一括コンパイルを実行してください。自動割付されなかったアドレスにも再度割
付が可能となります。
・変数名等の検索は、[検索する文字]を指定し、ボタン[検索]をクリックします。[検索する
文字]はワイルドカードの指定も可能です。例えば、’HM*’と指定すれば、’HM’で始まるす
べての変数だけを表示します。また、空文字を指定すれば、すべての変数を表示します。
I/O、ステーション、ネットワークは参照のみです。

第 5 章 制御プログラムの作成
6E8C4890 330
■ ファンクションブロック変数や一般の変数の宣言
変数宣言は、ダイアログ[変数]でキータイプする他に、次の手順で行うことができま
す。
1) 希望するプログラムまたはファンクションブロックを開きます。
2) メニュー<編集><編集可能>を選択して[編集中]の状態にします。
3) [メインビュー]にファンクションブロックや接点,コイル,入力変数,出力変数,
入出力変数など変数を必要とする命令シンボルを描画します。このとき、暗黙の変
数名(例:V1,V2,C1,C2 等)が表示されますが、必要ならこれを変更します。
4) 保存の時、未定義の変数があれば未定義の変数ダイアログに表示されます。
5) 範囲、種類、データ型をリストより選択してください。初期値、コメントは必要で
あれば入力します。範囲,種類はリスト選択のみです。種類を VAR_INPUT にする
など範囲、種類を選択可能なもの以外に設定する場合はダイアログ[変数]にて設定
してください。データ型はキータイプ可能です。また、左端のチェックボックスを
外すことで該当の変数は登録から除外できます。
6) ボタン[登録]をクリックすると変数宣言完了です。
7) 変数宣言の結果は、メニュー<編集><利用できる変数>を選択してダイアログ
[変数]にて確認できます。
●注記
・ 呼び出し元のプログラムに影響を与えますので、必ず次の操作を行ってください。
・ ローカル変数を追加または削除した場合は、呼び出し元のプログラムで、このファンクション
ブロックの変数を削除後、再登録してください。
・ 引数を変更した場合は、呼び出し元のプログラムで、このファンクションブロックの命令シン
ボルを削除後、再描画してください。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 331
■ [未定義の変数]で自動的に表示される’範囲’を制御するには
次の手順で<範囲>と<変数名の接頭語>を登録しておけば[未定義の変数]に暗黙で
表示される変数宣言の<範囲>を制御することが可能です。
1) メニュー<ツール><接頭語の設定>にて変数の接頭語を登録します。
○補足
・ 登録した接頭語が他の項目の接頭語に適合する場合は、自動変数宣言が正しく行われません。
例:
VAR_INPUT の接頭語:”Vi”
VAR_IN_OUT の接頭語:”Vio”
上 記 の よ う に 登 録 す る と 、 ”Vi” が VAR_IN_OUT の 接 頭 語 に 含 ま れ て い る た め
VAR_IN_OUT ではなく、VAR_INPUT として自動変数宣言されます。
このような場合は、接頭語の末尾にアンダースコア等の区切り文字を追加してください。
VAR_INPUT の接頭語:”Vi_”
VAR_IN_OUT の接頭語:”Vio_”
2) 変数名に接頭語を見て変数宣言の<範囲>を自動決定します。
対象の命令語は、接点、コイル、ゲート、入力変数、出力変数、入出力変数、微分
接点、微分コイルです。

第 5 章 制御プログラムの作成
6E8C4890 332
5.4.6 ファンクションを使う
基本的なグラフィックの描画の操作方法は、「プログラムを描画する」の項を参照し
てください。ここでは、ファンクションに特化して説明します。
■ ファンクションを描画する
・ エディタビューにフォーカスし、カーソルを表示します。
・ メニュー<編集><利用できるファンクション>を実行します。
・ 下図ダイアログで、ファンクションを選択します。
…ファンクション、ファンクションブロック分類 <All>:全ての標準ファンクション、標準ファンクションブロックを名
に表示します。 お気に入り:不定型の標準ファンクションを表示します。 ワーク:ユーザファンクション、ユーザファンクションブロックを名
に表示します。 機能別:機能別の標準ファンクション、標準ファンクションブロック
前順に表示します。
ファンクションのリスト
・ ファンクションのリストから描画したいファンクションをダブルクリックすれば、
エディタビューのカーソル位置にファンクションが描画されます。
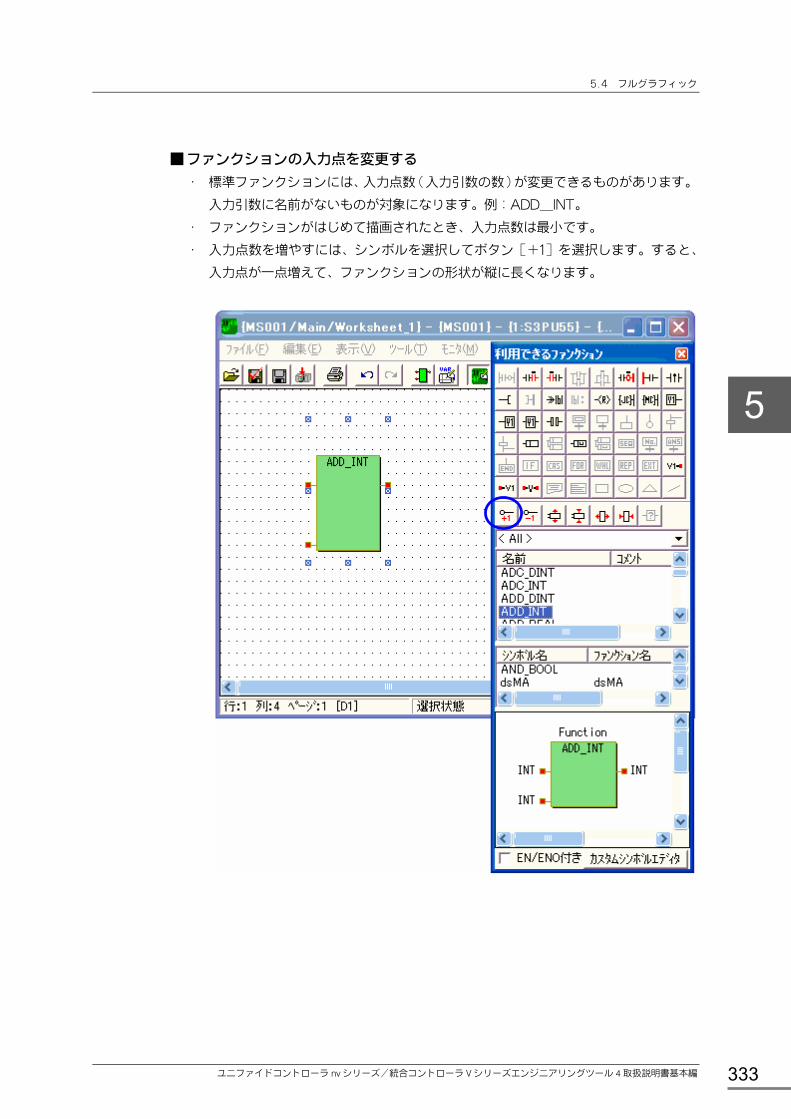
5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 333
■ ファンクションの入力点を変更する
・ 標準ファンクションには、入力点数(入力引数の数)が変更できるものがあります。
入力引数に名前がないものが対象になります。例:ADD_INT。
・ ファンクションがはじめて描画されたとき、入力点数は 小です。
・ 入力点数を増やすには、シンボルを選択してボタン[+1]を選択します。すると、
入力点が一点増えて、ファンクションの形状が縦に長くなります。

第 5 章 制御プログラムの作成
6E8C4890 334
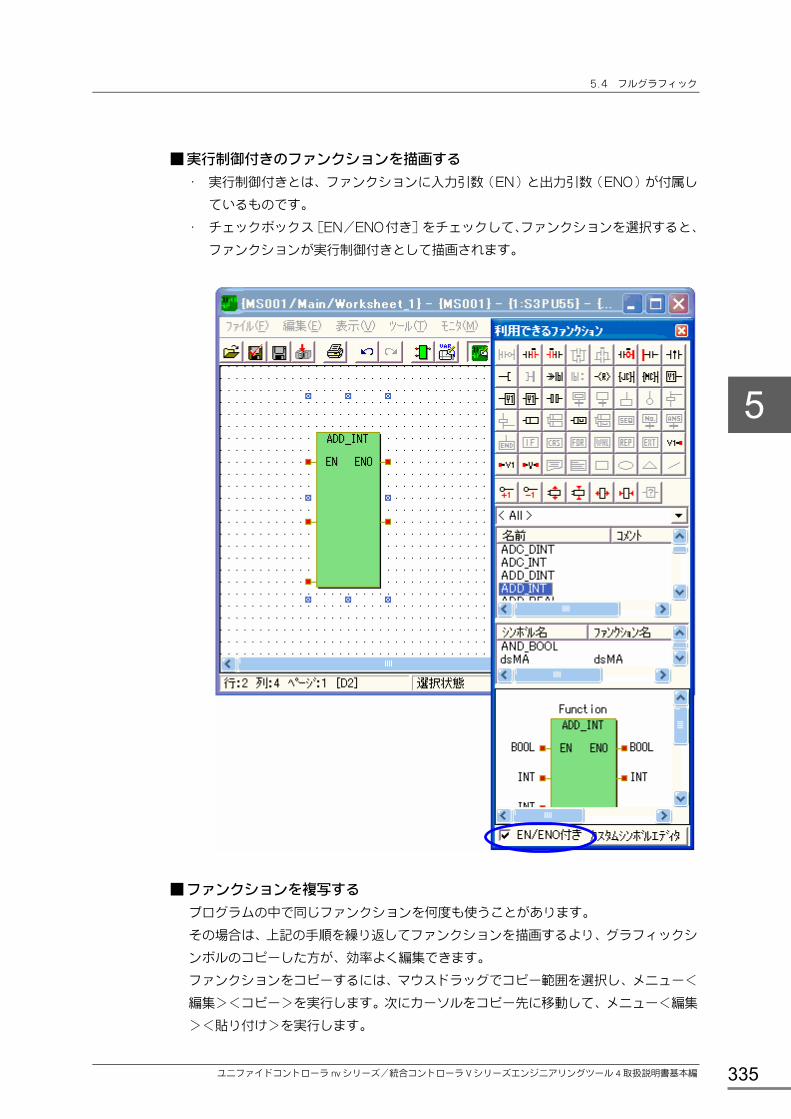
5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 335
■ 実行制御付きのファンクションを描画する
・ 実行制御付きとは、ファンクションに入力引数(EN)と出力引数(ENO)が付属し
ているものです。
・ チェックボックス[EN/ENO付き]をチェックして、ファンクションを選択すると、
ファンクションが実行制御付きとして描画されます。
■ ファンクションを複写する
プログラムの中で同じファンクションを何度も使うことがあります。
その場合は、上記の手順を繰り返してファンクションを描画するより、グラフィックシ
ンボルのコピーした方が、効率よく編集できます。
ファンクションをコピーするには、マウスドラッグでコピー範囲を選択し、メニュー<
編集><コピー>を実行します。次にカーソルをコピー先に移動して、メニュー<編集
><貼り付け>を実行します。

第 5 章 制御プログラムの作成
6E8C4890 336
5.4.7 ファンクションブロックを使う
■ ファンクションブロックを描画する
・ ファンクションの描画と同じ操作です。「ファンクションを使う」の項を参照してく
ださい。
■ ファンクションブロックの変数を宣言する
・ ファンクションブロックは、履歴性をもつデータを内包しています。そのためファ
ンクションブロック自体を静的な変数として宣言する必要があります。
・ ファンクションブロックの変数は、呼び出し側のプログラムまたはファンクション
ブロックのローカル変数として宣言します。
・ 例えば、ファンクションブロックとして、オンディレータイマ(TON)を3つ使って
いるプログラムがあるとします。その変数名は、TON_1,TON_4,tmEMG である
とします。メニュー<編集><利用できる変数を開く>からローカル変数の変数宣
言を次のように記述します。ここで、ファンクションブロック名(TON)は、独自の
データ型として扱われます。
■ ファンクションブロックを複写する
プログラムの中で同じファンクションブロックを何度も使うことがあります。
その場合は、上記の手順を繰り返してファンクションブロックを描画するより、グラフ
ィックシンボルをコピーした方が効率よく編集できます。
ファンクションブロックをコピーするには、コピーするファンクションブロックを選択
して、メニュー<編集><コピー>を実行します。
次に貼り付け先にカーソルを移動して、メニュー<編集><貼り付け>を実行します。
変数名も含めてコピーします。コピー/貼り付けしたとき、ファンクションブロックの
変数は重複しない変数名として自動的に登場し<上書き保存>時、[未定義の変数]と
して自動的に登場するので自動宣言することが可能です。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 337
コピー 貼り付け

第 5 章 制御プログラムの作成
6E8C4890 338
5.4.8 変数や命令語を検索・置換する
プログラムエディタにおいて、ひとつのワークシート内、ひとつのタスク(1プログ
ラム)内、またはコントローラ内の、変数名、命令語を検索したり、置換するには次の
手順で行います。
‘ワークシート’については、「5.4.9 さまざまな編集・表示機能」をご覧ください。
検索・置換対象は以下のとおりです
命令語 対象
接点/コイル 変数名
ファンクション/ファンクションブロック ファンクションブロックの変数名、ファンクション/ファンクションブロック名 (命令語検索時のみ)
入力変数,出力変数,入出力変数 変数名
ゲート 変数名
Bool 型 Action タイマ設定値、アクション変数
User 型 Action タイマ設定値、アクション変数、インジケータ変数名
ステップ ステップ変数名
トランジション 変数名
IF/CASE/FOR/WHILE/REPEAT 条件式、初期値、 終値、増分
Jump/ラベル ラベル名

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 339
■ 文字列を検索する
プログラムエディタにおいて、
1) メニュー<編集><検索/置換>をクリックします。
2)<検索する文字列>で検索する文字を入力します。
3)検索範囲として、<範囲><方向><比較>を適宜選択します。
<範囲> <ワークシート>:現在のワークシート内を範囲とします。 <POU>:現在のタスク(プログラム)内を範囲とします。 <コントローラ>:現在のコントローラ内を範囲とします。
<方向> (ワークシート、 POUの場合有効)
<上方向>:上方向に検索します。 <下方向>:下方向に検索します。
<比較> <検索文字と一致>:検索文字と一致する文字列を検索します。 <検索文字を含む>:検索文字を含む文字列を検索します。
4) ボタン[次を検索]を押します。
<ワークシート>または<POU>範囲の検索の場合:検索結果があれば、その場
所にカーソルを移動します。
<コントローラ>範囲の検索の場合:検索ダイアログが表示されます。
検索文字列 = POUNo : プログラム名 : Action ルーチン名 : ワー
クシート No-ワークシート内行:列
5) <ワークシート>または<POU>範囲の検索の場合、検索結果が2つ以上あると
き、ボタン[次を検索]を押せば、その次の場所にカーソルを移動します。
・ 比較で<検索文字を含む>にした場合、ワイルドカード検索を行なうことが出来ま
す。
文字パターン 一致する文字
? (半角) 任意の 1 文字
* (半角) 任意の数の文字
# (半角) 任意の 1 文字の数字 (半角)

第 5 章 制御プログラムの作成
6E8C4890 340
・検索は、“語句“として検索します。次に検索の事例を示します。
検索文字列と一致 検索文字を含む (ワイルドカード使用)
検索文字を含む (ワイルドカード使用)
検索する文字 “ ABCDE ” “ ABCDE* ” “ *ABCDE ”
検索される文字 “ ABCDE ” “ ABCDE ” , “ ABCDE[100] ”
“ ABCDE ” , “ D.ABCDE ”
検索されない文字 “ ABCDE_1 ” “ AABCDEE ” “ DATA_ABCDEF “
■ 文字列および命令語を組合せて検索する
プログラムエディタにおいて、
1) メニュー<編集><検索/置換>をクリックします。
2) <検索する文字列>を選択します。
3) [検索するシンボル]から検索したい命令語シンボルを選択します。
4) 検索範囲として、<範囲><方向><比較>を適宜選択します。
5) ボタン[次を検索]を押します。検索結果があれば、その場所にカーソルを移動しま
す。
6) 検索結果が2つ以上あるとき、ボタン[次を検索]を押せば、次の結果が検索されま
す。
<コントローラ>範囲の検索の場合:検索ダイアログが表示されます。
■ 文字列を置換する
<ワークシート>または<POU>
プログラムエディタにおいて、
1) 編集モードにして、メニュー<編集><検索/置換>をクリックします。
2) 範囲を<ワークシート>または<POU>にします。
3) <検索する文字列>を入力します。
4) <置換後の文字列>を入力します。
5) ボタン[置換]を押すと検索結果にカーソルが移動し、置換後の文字列に置き換わ
りえます。
<コントローラ>
プログラムエディタにおいて、
1) 表示モードにして、メニュー<編集><検索/置換>をクリックします。
2) 範囲を<コントローラ>にします。
3) <検索する文字列>を入力します。
4) <置換後の文字列>を入力します。
5) ボタン[一括置換]を押すと検索結果がダイアログに表示されます。
6) [置換]ボタンを押すと検索された文字列が置換されます。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 341
●注記
・ 置換したプログラムは編集されていますので、上書き保存または一時保存する必要があります。

第 5 章 制御プログラムの作成
6E8C4890 342
5.4.9 さまざまな編集・表示機能
ここでは、プログラムエディタで、これまで説明していない編集および表示機能つい
て説明します。
■ 行・列の挿入・削除
・ エディタビューで行および列の挿入・削除ができます。
・ 空き領域にドローイングカーソルがある時、メニュー<編集><空白を挿入><行
>を実行すると、カーソルの行に1行挿入します。
・ 空き領域にドローイングカーソルがある時、メニュー<編集><空白を削除><行
>を実行すると、カーソルの行の1行を削除します。
・ 空き領域にドローイングカーソルがある時、メニュー<編集><空白を挿入><列
>を実行すると、カーソルの列に1列挿入します。
・ 空き領域にドローイングカーソルがある時、メニュー<編集><空白を削除><列
>を実行すると、カーソルの列の1列削除します。
■ ピクチャとしてクリップする
制御ロジック図をメタファイル(EMF)形式のピクチャとしてクリップし、Excel 等の
EMF 形式をサポートするアプリケーションへ貼り付けることができます。
・ クリップしたい領域をマウスのドラッグで選択し、メニュー<編集><ピクチャをクリップ>
をクリックします。
・ 選択した範囲の制御ロジック図がメタファイル(EMF)形式のピクチャとしてクリ
ップボードに格納されます。
■ ピクチャとして保存する
制御ロジック図をメタファイル(EMF)形式のピクチャファイルとして保存することが
できます。
・ 保存したい領域をマウスのドラッグで選択し、メニュー<編集><ピクチャを保存>をクリ
ックします。ダイアログが表示されるので、保存先のファイル名を指定します。
■ 印刷境界線を表示する
・ 現在のページ設定に従った印刷境界線を表示する事ができます。
・ メニュー<表示><印刷境界線表示>を実行します。
・ 印刷境界線は青い点線で表示されます。
■ オーバービューを表示する
・ エディタビューの作画内容をすべて含むイメージを印刷境界線と共に表示すること
が出来ます。
・ メニュー<表示><オーバービュー>を実行します。
オーバービュー画面で指定したポイントにエディタビューの表示領域が切り替わります。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 343
■ 自由コメントを入力する
・ エディタビューには、自由コメントを入力することができます。自由コメントは、
グラフィック回路の可読性を高めるのに役に立ちます。
・ カーソルをグラフィックシンボルのない場所に置きます。
・ メニュー<編集><利用できるファンクション>を実行します。
・ [利用できるファンクション]から自由コメント を選択します。
・ 描画された自由コメント をダブルクリックすると、テキスト入力可能になりま
すので、自由にコメントを入力することができます。
・ テキスト入力可能時には、サイズを変更出来ます。右端、下端をマウスでドラッグ
して大きさを変更できます。
・ 自由コメントは、カット&ペーストで移動、複写したり、削除することができます。
■ テキストボックス、図形、線を入力する
・ [利用できるファンクション]からテキストボックス を選択して描画します。
・ テキストの入力については、自由コメントの項目を参照してください。
・ [利用できるファンクション]から図形(四角形、楕円、三角形) また
は線 を選択して描画します。
・ 図形のサイズの変更については、自由コメントの項目を参照してください。
・ 線の端点をマウスでドラッグすることで長さや角度を変更することができます。
・ 線の中点をドラッグすることで折れ線にすることができます。
・ プロパティを変更することでその外観を変えることができます。
・ プロパティを変更するには、部品を選択し,右ボタンをクリックし、メニュー<プロ
パティ>をクリックし、フォーム[プロパティ]を表示します。
・ プロパティの値を編集した後、ボタン[OK]を押して値を確定します。
■ 拡大・縮小する
・ エディタビューのグラフィックは、暗黙を 100%として、40%から 200%の間で変
更することができます。
・ メニュー<表示><ズーム>を実行します。
・ ダイアログが出るので、拡大率を指定します。
■ ワークシートの操作
‘ ワークシート’とはフルグラフィックの描画空間です。
POU の1つのメインルーチン内(またはユーザアクション内のサブルーチン毎に)
で、1から99枚までのワークシートに分けて描画することができます。
・ ワークシートの追加、挿入、削除、名前の変更、実行順の変更エクスポート、イン
ポートの操作を行なう事ができます。

第 5 章 制御プログラムの作成
6E8C4890 344
・ メニュー<ファイル><開く><ワークシートから開く>を実行します。
・ ワークシートの名前の変更:名前を変更したいワークシートを選択後、[F2]キー
を押すと変更可能状態になります。
・ ワークシートの実行順の変更:実行順を変更したいワークシートを選択後、↑、↓
キーで実行順を入れ替えます。
・ ワークシートの追加:[ワークシート]の[追加]ボタンを押すと末尾に新しいワー
クシートが追加されます。
・ ワークシートの挿入:[ワークシート]の[挿入]ボタンを押すと選択中のワークシ
ートの前に新しいワークシートが追加されます。
■ ツールアイコン
・ツールアイコンの意味は次のとおりです。
リドゥ
アンドゥ
保存とダウンロード
印刷
一時保存
上書き保存
ワークシートから開く
利用できる変数
編集可能ズーム
オーバビューデータ値モニタ
オンラインマニュアル
利用できるファンクション
・ツールアイコン上にマウスと置くとその意味が表示されます。
・ツールアイコンの機能は、メニューでも用意されています。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 345
■ グラフィックの色を変更する
V-Tool3 のフルグラフィック・プログラムエデイタ、Ver3.3.0 以上では、グラフィ
ックオブジェクトの色を変更できます。
・ メニュー<ツール><表示色の設定>をクリックし、下図の設定フォームを開きます。
カラーパレットの選択
色のカスタマイズ
グラフィックオブジェクトの初期設定色はカラーパレット[標準1]の色を設定してい
ます。
カラーパレットの名前があるフィールドをクリックすれば、[標準 2]または[デザイン]
等の他のパレットに変更できます。パレットを変更すれば、それに応じてサンプル表示
されたグラフィックオブジェクトの色が変更されます。

第 5 章 制御プログラムの作成
6E8C4890 346
[標準1] [標準 2]パレットの個々の色は推奨色であり、固定ですが、[デザイン]パレ
ットの個々の色は次の2つの方法で変更できます。
・ [デザイン] パレットが選択されている状態で変更したいカラーセルをクリックし、
色テーブルを表示、そこで希望する色を選択します。
・ [標準1] [標準 2]パレットの任意のカラーセルをマウスでドラッグし、変更し
たいカラーセルにドロップします。
○補足
・ V-Tool3 のVer3.3.0 以降で作成したワークシートを、それ未満のバージョンで表示した場合、
そのワークシート固有の色で表示され、その色を変更することはできません。
・ [メモリモニタ]の項目は、nV-Tool4 Ver.4.5.1[3]、V-Tool3 Ver3.13.0、V-Tool2
Ver2.17.0 以降の場合に該当します。
ただし、ユニファイドコントローラ nv シリーズ type1 のみで有効な機能です。
それ以外のコントローラでも表示しますが、機能は無効です。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 347
5.4.10 タスクを保存する
■ 上書き保存する
・ メニュー<ファイル><上書き保存>で、該当の Pou の描画内容を保存すると同時
にコンパイルを行います。
・ コンパイルエラーがあれば、エラーリストを表示するかの旨メッセージが出ます。
・ エラーリストがあると、メニュー<編集><コンパイルエラーリスト>が有効にな
りますので、後で開くこともできます。
・ エラーリストの例を下図に示します。
・ エラー個所を知るには、エラーリストの行にフォーカスして、ボタン[ 開く ]を押
下すれば、エディタビューの該当個所にカーソルを移動します。
・ エラーリストは、ボタン[印刷]で、印刷出力することができます。
■ 一時的に保存する
・ メニュー<ファイル><一時保存>で、該当の Pou の描画内容をコンパイルしない
で保存します。
・ 編集の途中で一時的に描画内容を保存したいときに使用します。

第 5 章 制御プログラムの作成
6E8C4890 348
5.4.11 データ型・命令語の実行順序を表示する
■ データ型を表示する
[プログラムエディタ]において、コンパイルが完了したタスクでは、命令シンボルや
変数のデータ型を表示することができます。
1) メニュー<表示><データ型表示>をクリックします。
下記のように、データ型が表示されます。
略号の意味は次のとおりです。
略号 意味
B BOOL 型
W WORD 型
DW DWORD 型
I INT 型
UI UINT 型
DI DINT 型
R REAL 型
T TIME 型
D DATE 型
TD TOD 型
DT DT 型
ST STRING 型
2) データ型の表示をやめるときは、再度、メニュー<表示><データ型表示>をクリ
ックします。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 349
■ 命令の実行順序を表示する
[プログラムエディタ]において、コンパイルが完了したタスクでは、命令語の実行順
(ステップ番号)を表示することができます。
1) メニュー<表示><ステップ番号表示>をクリックします。
下記のように、ステップ番号が表示されます。
2) ステップ番号の表示をやめるときは、再度、メニュー<表示><ステップ番号表示
>をクリックします。
■ ワークシート単位に実行番号を表示する
[プログラムエディタ]において、コンパイルが完了したタスクでは、命令語の実行番
号をワークシート単位で表示することができます。
実行番号はワークシート内で1からの連番で表示され、以下のシンボルにのみ実行番号
が表示されます。
・ファンクション
・ファンクションブロック
・イニシャルステップ
・ステップ
・アクション(ブール型)
・アクション(ユーザ定義型)
・シーケンス
・フェーズステップ
・フェーズエンド
・アンサステップ
[ワークシート内の実行番号を表示する]
メニュー<表示><ワークシート内の実行番号表示>をクリックします。ワークシート
内の実行番号の表示をやめるときは、再度メニュー<表示><ワークシート内の実行番
号表示>をクリックします。
※ ステップ番号表示とワークシート内の実行番号表示を同時に指定することはできま
せん。
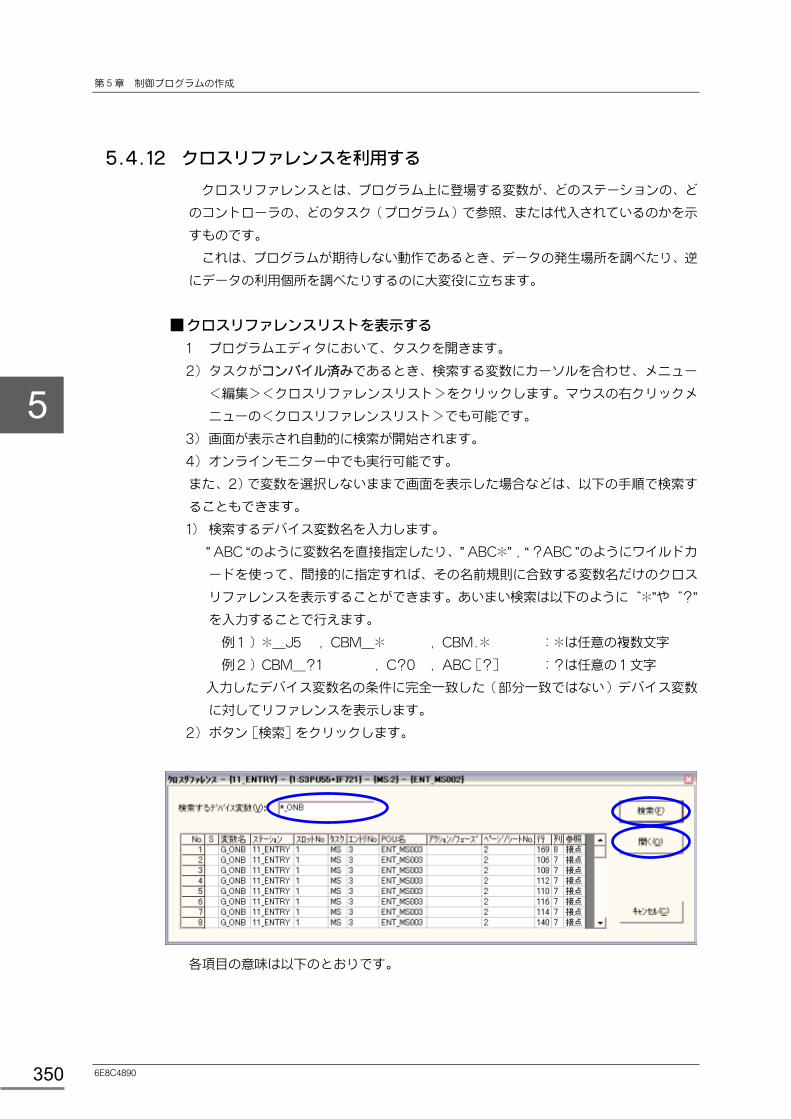
第 5 章 制御プログラムの作成
6E8C4890 350
5.4.12 クロスリファレンスを利用する
クロスリファレンスとは、プログラム上に登場する変数が、どのステーションの、ど
のコントローラの、どのタスク(プログラム)で参照、または代入されているのかを示
すものです。
これは、プログラムが期待しない動作であるとき、データの発生場所を調べたり、逆
にデータの利用個所を調べたりするのに大変役に立ちます。
■ クロスリファレンスリストを表示する
1 プログラムエディタにおいて、タスクを開きます。
2) タスクがコンパイル済みであるとき、検索する変数にカーソルを合わせ、メニュー
<編集><クロスリファレンスリスト>をクリックします。マウスの右クリックメ
ニューの<クロスリファレンスリスト>でも可能です。
3) 画面が表示され自動的に検索が開始されます。
4) オンラインモニター中でも実行可能です。
また、2)で変数を選択しないままで画面を表示した場合などは、以下の手順で検索す
ることもできます。
1) 検索するデバイス変数名を入力します。
” ABC “のように変数名を直接指定したり、” ABC*” , “ ?ABC ”のようにワイルドカ
ードを使って、間接的に指定すれば、その名前規則に合致する変数名だけのクロス
リファレンスを表示することができます。あいまい検索は以下のように“*”や“?”
を入力することで行えます。
例1) *_J5 ,CBM_* ,CBM.* :*は任意の複数文字
例2) CBM_?1 ,C?0 ,ABC[?] :?は任意の1文字
入力したデバイス変数名の条件に完全一致した(部分一致ではない)デバイス変数
に対してリファレンスを表示します。
2) ボタン[検索]をクリックします。
各項目の意味は以下のとおりです。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 351
○補足
・ 下表はジャンプ先がフルグラフィックの場合です。ジャンプ先のプログラムエディタがセミグ
ラフィック/テキストの場合は、それぞれの説明を参照してください。
・エンジニアリングツールのバージョンによっては、表示項目が少ない場合があります。
・エンジニアリングツールのバージョンによっては、1 台の PC でクロスリファレンス検索ウィン
ドウを 大 20 個まで表示することができます。
項目名 検索結果
S 起動元の 1 箇所のみに”*”を表示します。
変数名 検索されたデバイス変数名
ステーション ステーション名
スロット No. メインモジュールのスロットNo.
タスク 変数が参照、代入されているタスク
エントリ No. タスクエントリNo.
POU 名 プログラム名
アクション/フェーズ アクション名またはフェーズ名
ページ/シート No. ワークシート No.
行 ワークシート上の行番号
列 ワークシート上の列番号
参照 LD(入力変数)、ST(出力変数、入出力変数)、SET、接点、コイル、セットコイル、リセットコイル Note: 空欄は、その位置(行・列)にファンクションブロック/ファンクションの命令シンボルがあり、検索された変数の実態がないことを示します。つまり、検索した変数名が、そのファンクションブロック/ファンクション内で使用されていることを意味します。
■ プログラムを開く
クロスリファレンスリストに示された位置(ステーション/スロット/タスク)のプロ
グラムを開くには、つぎの手順で行います。
1) クロスリファレンスリストの注目する行をクリックします。
2) ボタン[開く]をクリックします。
プログラムエディタが開かれ、この行で指定された位置にカーソルが移動します。
オンライン/オフライン状態は、ジャンプ先で呼び出し状態を継続します。
○補足
・ ジャンプ先がファンクションブロック/ファンクションの命令シンボルの場合、プログラムエ
ディタを開きますが、カーソルはその位置を指しません。
これは、検索した変数名がその位置に実在しないためです。
この場合は、検索結果の行・列を参照し、命令シンボルを特定してください。
・ ジャンプ先がファンクションブロック/ファンクション内の場合、ライブラリ起動と同じ状態
で開きます。
つまり、必ずオフライン状態で開きます。

第 5 章 制御プログラムの作成
6E8C4890 352
5.4.13 デバイス変数プロパティ
プログラムで使用しているデバイス変数の属性を表示することができます。
■ 制約事項
デバイス変数プロパティの表示中に、表示内容に該当する項目が、他のアプリケーショ
ンや他のユーザにより、変更された場合でも、表示内容の自動リフレッシュは行ないま
せん。
一旦デバイス変数プロパティ画面を閉じてから、再度表示してください。
■ デバイス変数プロパティを開く
1) [プログラムエディタ]のメインビュー上において、属性を表示したい変数にカー
ソルを合わせ、メニュー<表示><デバイス変数のプロパティ>をクリックします。
マウスの右クリックメニューでの<デバイス変数のプロパティ>でも同様です。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 353
・表示項目
アイテム\スコープ ネットワーク ネットワークI/O
ステーション ステーションI/O
コントローラ コントローラI/O
ローカル
デバイス変数 ○ ○ ○ ○ ○ ○ ○
デバイスコメント ○ ○ ○ ○ ○ ○ ○
データ型 ○ ○ ○ ○ ○ ○ ○
ネットワーク ○ ○ - - - - -
ネットワークモジュール ○ ○ - - - - -
ステーション - ○ ○ ○ ○ ○ ○
コントローラ - ○ ○ ○ ○ ○ ○
I/O モジュール - ○ - ○ - ○ -
スキャンデータアドレス ○ ○ - - - - -
コントローラメモリ ○ ○ ○ ○ ○ ○ ○
メモリデータアドレス ○ ○ ○ ○ ○ ○ -
プログラム - - - - - - ○
入出力 ○ ○ ○ ○ - ○ ○
・ スコープ…NETWORK(ネットワーク),STATION(ステーション),CONTROLLER(コントロー
ラ),LOCAL(ローカル)いずれか表示します。
・ デバイス変数…{Device name}の書式で表示します。
・ デバイスコメント…{Device comment}の書式で表示します。
・ データ型…{Data type}の書式で表示します。
・ ネットワーク…{NetNo}:{Network CatCode}:{Network Comment}の書式で表示し
ます。
・ ネットワークモジュール…{NodeNo}:{Node CatCode}の書式で表示します。
・ ステーション…{Station name}の書式で表示します。
・ コントローラ…{SlotNo}:{Controller Catcode}:{Contoller Comment}の書式で表示
します。
・ I/O モジュール…{MM-BB-UU-SS.WordNo[.BitNo][,IO Area Name]}:{I/O
Module Catcode}の書式で表示します。
・ スキャンデータアドレス…{Talker BlockNo}.{WordNo}[.{BitNo}]の書式で表示します。
・ コントローラメモリ…{Memory Block Name}の書式で表示します。
・ メモリデータアドレス…{%MW*}(IQ*)の書式で表示します。
・ プログラム名…{POU Name}の書式で表示します。
・ 入出力…INPUT,OUTPUT,IN_OUT のいずれかを表示します。

第 5 章 制御プログラムの作成
6E8C4890 354
5.4.14 不定型ファンクション命令を利用する
■ 不定型ファンクション命令とは
不定型ファンクション命令とは、標準ファンクションのひとつであり、以下の特長を持
っています。
・ 命令シンボルを配置するときに、ファンクションのデータ型を指定する必要があり
ません。
・ ファンクションのデータ型は、命令シンボルに結線した変数などのデータ型をもと
にして、プログラムエディタがプログラム保存(コンパイル)時に自動決定します。
プログラムエディタ(フルグラフィック)にて、以下の命令語タイプのものを利用する
ことができます。
命令語種別 命令語タイプ 命令シンボルの表記
加算 +
減算 -
乗算 *
算術演算
除算 /
論理積 AND
論理和 OR
論理否定 ~
論理演算
排他的論理和 XOR
より大きい >
より大きいまたは等しい >=
等しい =
より小さいまたは等しい <=
より小さい <
比較機能
等しくない <>
使用例:
不定型ファンクション命令の効果的な利用場面は、以下のとおりです。
1) 回路を効率的に描画する
四則演算など利用頻度の高いファンクションのデータ型を指定することなく描画
できます。
また、命令シンボルに接続した変数のデータ型も半自動的に決定できます。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 355
2) 命令シンボルや回路をコンパクトに描画する
命令シンボルのサイズを小さくしても視認性が良く、回路の描画範囲を小さくでき
ます。
ファンクションの入力先のデータ型が異なる場合でも、タイプ変換命令の挿入を省
略できます。
■ 不定型ファンクション命令を配置する
・ [プログラムエディタ (フルグラフィック)]を開きます。
・ メニュー<編集><編集可能>をクリックして、[利用できるファンクション]を開
きます。
ファンクションリスト
シンボルビュー
・ ワークシートの空き領域をクリックしてドローイングカーソルを置きます。
・ [ファンクションリスト]で希望するシンボルをクリックすると、[シンボルビュ
ー]にイメージが登場します。
・ [ファンクションリスト]で希望するシンボルをダブルクリックすると、ワークシー
ト上に描画されます。

第 5 章 制御プログラムの作成
6E8C4890 356
・ ワークシート上に描画されたシンボルはその他の命令シンボル同様、移動、結線等
の編集作業が可能です。
・ 可変入力点を持つシンボルは、他の標準ファンクションと同様に、入力点数を増減
することができます。
不定型ファンクション命令の各命令語の詳細については、「命令語編」を参照ください。
■ エラー内容と対処法
不定型ファンクション命令で使用する変数のデータ型定義に不整合があるときは、コン
パイル時にエラーとして通知します。その内容と対処の方法は以下のとおりです。
[不定型ファンクション命令に関するコンパイルエラー]
エラーNo. メッセージ 対処法
465 データ型が一致しないか、そのデータ型で演算できません。
490 不定型命令語では、このデータ型または組合せを使用できません。INOUT 命令を挿入してデータ型を確定するか、入出力のデータ型を見直してください。
・ データ型を設定した INOUT 命令を挿入してください。
・ 入力変数、出力変数のデータ型を確認してください。
・ タイプ変換できないデータ型を設定していないか確認してください。
■ データ型を自動で決定する(暗黙のデータ型について)
不定型ファンクション命令にて自動決定される暗黙のデータ型は、以下のとおりです。
1) 命令語のデータ型
結線されている変数のデータ型が全て未定義で、データ型を決定できない場合には、
命令語種別に応じて暗黙にデータ型を決定します。
[暗黙で設定される命令語のデータ型]
命令語種別 暗黙のデータ型
算術演算命令 REAL
論理演算命令 BOOL
比較機能命令 REAL
2) 定数のデータ型
不定型ファンクション命令に接続する定数のデータ型が明示されていない場合
(例:”1” , “-10” , など)は、命令語種別に応じて暗黙にデータ型を決定します。
[データ型を明示しない定数のデータ型]
命令語種別 暗黙のデータ型 注意事項
算術演算命令 REAL
論理演算命令 BOOL 表記が”0” または “1”の場合に限ります。 それ以外の表記は、定数の暗黙のデータ型の INT 型、または DINT 型と判断しますので、コンパイルエラーになります。
比較機能命令 REAL

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 357
○補足
・上表の例外として、同一の不定型ファンクション命令に接続する他の入力変数が INT 型、また
は DINT 型の場合には、INT 型、または DINT 型の定数として扱います。これは、従来との互換
性を確保するためのしくみです。
■ データ型を半自動で決定する
一部の変数のデータ型を指定することで、不定型ファンクション命令と、そのシンボル
に結線された他の変数のデータ型を半自動的に決定することができます。
具体的には、不定型ファンクション命令を含む回路にて利用したいデータ型を 1 種類だ
け設定します。ここで、データ型を設定するには、以下の方法があります。
1) 変数名にデータ型を設定する
2) データ型を明示している通常のファンクション(“ADD_REAL” , “AND_BOOL” ,
など)と結線する
3) 定数の表記に、データ型を明示する(例:”REAL#1” , “1.0” , など)
○補足
・ 1 つの回路内に 2 種類以上のデータ型を設定すると、期待するデータ型で演算されなかったり、
コンパイルエラーになったりする場合があります。
・ 2 種類以上のデータ型を設定する場合は、データ型を明示している通常のファンクションのご
利用をお勧めします。
なお、不定型ファンクション命令で、2 種類以上のデータ型を指定する場合は、後述の「さら
に詳しく不定型ファンクション命令のしくみを知る」をご覧になり、動作についてご理解いた
だいた上でのご利用をお願い致します。
・ 比較機能命令の出力側に接続する変数のデータ型は BOOL 型固定です。よって、出力側でのデ
ータ型の指定はできません。
■ さらに詳しく不定型ファンクション命令のしくみを知る
1 つの回路内に 2 種類以上のデータ型が存在する場合、以下のしくみでデータ型を決定
し、コンパイルを行います。
内部処理としては次の 3 つがあります。
・ 未定義変数のデータ型の自動決定:
不定型ファンクション命令に接続している未定義変数のデータ型を自動決定します。
・ 命令語のデータ型の自動決定:
不定型ファンクション命令の命令語のデータ型を自動決定します。
・ データ型タイプ変換命令の自動挿入:
不定型ファンクション命令のデータ型と入力引数に接続する変数などのデータ型が
異なる場合には、タイプ変換命令を自動挿入します。
以下では、これらについて解説しています。不定型ファンクション命令を利用する際に
有益な情報です。

第 5 章 制御プログラムの作成
6E8C4890 358
■ 未定義変数のデータ型決定方法
不定型ファンクション命令に接続している未定義変数のデータ型の決定方法について
解説します。
・ 不定型ファンクション命令を含む 1 つの回路に対して、データ型を決定します。
(回路とは、LD/FBD/SFC で作成した、「結線された命令語の集まり」の単位で
す。)
・ 不定型ファンクション命令以外の命令語(ADD_REAL, GE_DINT, 等)はデータ
型が定義されているため、定義済み変数と同等の扱いとし、ここでは、「変数」とし
て説明します。
・ 不定型ファンクション命令(比較機能命令)の出力先は BOOL 固定のため、データ型
決定の対象としません。
[内部処理]
定義済みの入力変数のデータ型(n 個)を下表に当てはめて、データ型を決定します。
表中の“(Default)”は、[暗黙のデータ型]により、データ型を決定します。
[不定型ファンクション命令(算術演算命令)の場合] データ型(1…n)
命令語の種別 データ型 (1…n) INT DINT UINT REAL
INT INT DINT DINT REAL
DINT DINT DINT DINT (Default)
UINT DINT DINT UINT REAL
・加算(+) ・減算(-) ・乗算(*) ・除算(/) REAL REAL (Default) REAL REAL
例 : 変 数 (SAMPLE1,SAMPLE2,SAMPLE3) が 定 義 済 み の と き 、 そ の 他 の 変 数
(SAMPLE4, SAMPLE5)のデータ型は、上表を使用してデータ型を決定します。
SAMPLE1 “INT”
LD SAMPLE2 “REAL”
LD SAMPLE3 “UINT”
LD
SAMPLE5“(未定義)”
ST
SAMPLE1“INT”
LD SAMPLE2“REAL”
LD SAMPLE3“UINT”
LD
SAMPLE5 “REAL”
ST
SAMPLE4 “(未定義)”
LD
SAMPLE4“REAL”
LD
+ +
定義済みのデータ型を使って、以下の組み合わせで未定義変数のデータ型を決定します。 SAMPLE1
“INT”
SAMPLE2 “REAL”
SAMPLE3 “UINT”
“REAL”
“REAL” SAMPLE4
“REAL”
SAMPLE5 “REAL”

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 359
[不定型ファンクション命令(論理演算命令)の場合]
データ型(1…n) 命令語の種別
データ型 (1…n) BOOL WORD DWORD
BOOL BOOL (Default) (Default)
WORD (Default) WORD DWORD
・論理積(AND) ・論理和(OR) ・論理否定(~) ・排他的論理和 (XOR)
DWORD (Default) DWORD DWORD
例 : 変 数 (SAMPLE1,SAMPLE2,SAMPLE3) が 定 義 済 み の と き 、 そ の 他 の 変 数
(SAMPLE4, SAMPLE5)のデータ型は、上表を使用してデータ型を決定します。
SAMPLE1
“WORD” LD
SAMPLE2 “DWORD”
LD SAMPLE3 “WORD”
LD
SAMPLE5“(未定義)”
ST
SAMPLE1“WORD”
LD SAMPLE2
“DWORD”LD
SAMPLE3“WORD”
LD
SAMPLE5 “DWORD”
ST
SAMPLE4 “(未定義)”
LD
SAMPLE4“DWORD”
LD
AND AND
[不定型ファンクション命令(比較機能命令)の場合]
データ型(1…n) 命令語の種別
データ型 (1…n) INT DINT UINT REAL WORD DWORD
INT INT DINT DINT REAL DINT (Default)
DINT DINT DINT DINT (Default)
DINT (Default)
UINT DINT UINT DINT REAL UINT DWORD
REAL REAL (Default) REAL REAL (Default) (Default)
WORD DINT UINT DINT (Default)
WORD DWORD
・より大きい( > )・より大きいまたは 等しい( >= ) ・より小さいまたは
等しい( <= ) ・より小さい( > )・等しい( = ) ・等しくない
( <> ) DWORD (Default)
DWORD (Default)
(Default)
DWORD DWORD
例 : 変 数 (SAMPLE1,SAMPLE2,SAMPLE3) が 定 義 済 み の と き 、 そ の 他 の 変 数
(SAMPLE4) の デ ー タ型 は 、 上 表を 使 用 し てデ ー タ 型 を決 定 し ま す。 変 数
(SAMPLE5)は比較機能命令のため、BOOL に決定します。
SAMPLE1 “INT”
LD SAMPLE2 “REAL”
LD SAMPLE3 “UINT”
LD
SAMPLE5“(未定義)”
ST
SAMPLE1“INT”
LD SAMPLE2“REAL”
LD SAMPLE3“UINT”
LD
SAMPLE5 “BOOL”
ST
SAMPLE4 “(未定義)”
LD
SAMPLE4“REAL”
LD
>= >=

第 5 章 制御プログラムの作成
6E8C4890 360
■ 命令語のデータ型決定方法
不定型ファンクション命令の命令語のデータ型決定方法について解説します。
不定型ファンクション命令の各命令語の詳細は、「命令語編」を参照ください。
不定型ファンクション命令の命令語種別や分岐有無に応じて、3 パターンの決定方法が
あります。
1) 回路の下流からデータ型を決定する。 (算術演算命令、論理演算命令の場合)
2) 回路の上流を参照して、データ型を決定する。(比較機能命令の場合)
3) 不定型ファンクション命令の出力先に分岐があり、かつ、分岐先のデータ型が 2 種
類以上の場合は、以下の「データ型決定表」により、命令語のデータ型を決定する。
以下では、これらの 3 パターンについて、それぞれ説明します。
1) 回路の下流からデータ型を決定する。 (算術演算命令、論理演算命令の場合)
「回路の下流から」とは、「命令語の実行順の後ろから」という意味です。
例: SAMPLE1 “UINT”
LD SAMPLE2 “UINT”
LD
+
SAMPLE3 “INT”
LD SAMPLE4 “INT”
LD
SAMPLE5“REAL”
ST
*
ADD_INT
SAMPLE1“UINT”
LD SAMPLE2“UINT”
LD
+
“REAL”
[1]
SAMPLE3“INT”
LD SAMPLE4“INT”
LD
SAMPLE5“REAL”
ST
*
“REAL”
[2]
ADD_INT
・ [ ]の番号は命令語の実行順です。(説明を簡単にするために、不定型ファンクショ
ン命令だけの順番です)
・ 初に、[2]算術演算命令の“乗算(*)”のデータ型を決定します。
・ 出力先の変数は REAL のため、“乗算(*)”のデータ型を REAL に決定します。
・ 次に、[1]算術演算命令の“加算(+)”のデータ型を決定します。
・ 出力先の不定型ファンクション命令は、上記で REAL に決定したため、“加算(+)”
のデータ型を REAL に決定します。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 361
2)回路の上流を参照して、データ型を決定する。(比較機能命令の場合)
「回路の上流」とは、「命令語の実行順の前方」を指します。
例: SAMPLE1
“INT” LD
SAMPLE2 “INT”
LD
+
SAMPLE3 “DINT”
LD SAMPLE4 “DINT”
LD
SAMPLE5“BOOL”
ST
=
ADD_DINT
SAMPLE1“INT”
LD SAMPLE2“INT”
LD
+
“DINT”
[1]
SAMPLE3“DINT”
LD SAMPLE4“DINT”
LD
SAMPLE5“BOOL”
ST
=
“DINT”
[2]
ADD_DINT
・ [ ]内の番号は命令語の実行順です。(説明を簡単にするために、不定型ファンクシ
ョン命令だけの順番です)
・ 初に、[2]比較機能命令の“等しい(=)”のデータ型を決定します。
・ 出力先の変数は BOOL 固定のため、入力先のデータ型を参照します。
・ [1]算術演算命令の“加算(+)”のデータ型は、決定していないため、参照しませ
ん。
・ 算術演算命令の“加算(ADD_DINT)”のデータ型は DINT のため、“等しい(=)”
のデータ型を DINT に決定します。
・ 次に、[1]算術演算命令の“加算(+)”のデータ型を決定します。
出力先の不定型ファンクション命令は上記で、DINT に決定したため、“加算(+)”
のデータ型を DINT に決定します。
○補足
・ 上記の例は、説明を簡単にするために、データ型が 1 種類の場合です。
データ型が 2 種類以上の場合については、命令語編に記載している方法で命令語のデータ型を
決定します。
3) 不定型ファンクション命令の出力先に分岐があり、かつ、分岐先のデータ型が 2 種
類以上の場合は、以下の「データ型決定表」により、命令語のデータ型を決定する。
[データ型決定表] ×:コンパイルエラー
データ型(1…n) データ型 (1…n) INT DINT UINT REAL WORD DWORD
INT INT DINT DINT REAL DINT ×
DINT DINT DINT DINT × DINT ×
UINT DINT DINT UINT REAL UINT DWORD
REAL REAL × REAL REAL × ×
WORD DINT DINT UINT × WORD DWORD
DWORD × × DWORD × DWORD DWORD

第 5 章 制御プログラムの作成
6E8C4890 362
例: SAMPLE1
“INT”LD
SAMPLE2 “INT”
LD
SAMPLE5“REAL”
ST
+ /
SAMPLE3“REAL”
LD
SAMPLE4“INT”
LD
SAMPLE1 “INT”
LD SAMPLE2 “INT”
LD
SAMPLE5“REAL”
ST
+
“REAL”
[1]
/
“REAL”
[2] SAMPLE3“REAL”
LD
SAMPLE4“INT”
LD
* SAMPLE6“INT”
ST
*
“INT”
[3]
SAMPLE6“INT”
ST
注意:この例はコンパイ
ルエラーになります。
・ [ ]内の番号は命令語の実行順です。(説明を簡単にするために、不定型ファンクシ
ョン命令だけの順番です)
・ 初に、[3]算術演算命令の“乗算(*)”のデータ型を決定します。
・ 出力先の変数に合わせて INT に決定します。
・ 次に、[2]算術演算命令の“加算(/)”のデータ型を決定します。
・ 出力先の変数に合わせて REAL に決定します。
・ 後に、[1]算術演算命令の“加算(+)”のデータ型を決定します。
・ 出力先は、上記で REAL と INT の 2 種類があるため、[データ型決定表]より、REAL
に決定します。
○補足
・ この例は REAL→INT の演算を含んでいます。この場合、データ値によっては切り捨てられる
可能性があるため、コンパイルエラーです。したがいまして、通常は分岐先のデータ型が同じ
データ型となるように設定の上、ご利用ください。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 363
■データ型のタイプ変換命令の自動挿入方法
不定型ファンクション命令のデータ型と入力引数に接続する変数などのデータ型が異
なる場合における、データ型のタイプ変換命令の自動挿入について解説します。
・ 「不定型ファンクション命令のデータ型」と「不定型ファンクション命令の入力引
数に接続するデータ型」が異なる場合は、タイプ変換命令を自動挿入します。
例: SAMPLE1
“INT” LD
SAMPLE2 “REAL”
LD SAMPLE3 “UINT”
LD
SAMPLE4“REAL”
ST
SAMPLE4“REAL”
ST 内部 処理
+ ADD_REAL SAMPLE1“INT”
LD SAMPLE2“INT”
LD SAMPLE3“UINT”
LD
タイプ変換命令 “INT→REAL” INT_TO_REAL
タイプ変換命令 “UINT→REAL”UINT_TO_REAL
○補足
・ ファンクションの入力側にタイプ変換命令を自動挿入します。出力側には自動挿入しません。
・ タイプ変換命令を自動挿入したとき、プログラムのステップ数は増加します。
・ 不定型ファンクション命令の命令語種別が算術演算命令および比較機能命令の場合で、入力先
のデータ型が WORD のときは、DINT または UINT へタイプ変換します。
■制約事項
・ データ型を変換することで、値が切り捨てられる場合や誤差の出る可能性がある場
合には、タイプ変換命令を挿入せずにコンパイルエラーとします。
例:切り捨てられるケース
入力 1(INT)+入力 2(UINT)=出力(UINT)の場合、INT のマイナス値が捨てられ
る。
例:誤差の出るケース
入力 1(DINT)+入力 2(DINT)=出力(REAL)の場合、入力 1+入力 2 の結果が”
-16777215”~”16777215”の
範囲を超える場合は誤差が生じる。
・ タイプ変換命令の自動挿入において、BCD データはサポートしません。
■INOUT 命令語(入出力変数)のデータ型決定について
INOUT 命令語のデータ型は、INOUT 命令語の出力先に、データ型が決定している変数
や通常のファンクションがある場合、そのデータ型で決定します。
対象となる変数やファンクションが存在しない場合は、入力変数や出力変数と同様にデ
ータ型を決定します。

第 5 章 制御プログラムの作成
6E8C4890 364
5.4.15 命令語の実行順序を変更する
命令語の実行順序は、IEC61131-3 の規格に準拠しています。基本的には、横書きの
文章のように左上から右下に向かって実行されます。ここでは、この実行順序を変更す
る手順について説明します。
●注記
・ 実行順序の変更は、演算の順序が変わるため、システムに予期しない影響を与える場合があり
ます。実行順序を変更した場合の影響を検証してから行ってください。
・ 実行順序を変更している場合、保存などの処理に時間がかかることがあります。
■ 実行順序を表示する
はじめに、現在の実行順序を確認します。
1) タスクエントリから、上書き保存されたプログラムを開きます。
2) メニュー<ツール><ネットワークに実行順を指定する>を選択すると、プログラム上の各ネ
ットワーク左上に◇が表示され、その中に実行順 No.が表示されます。
○補足
・ ネットワークとは、結線で接続された 2 つ以上の命令語シンボルの集まりを指します。
・ このメニューは、上書き保存されたプログラムを読み取り専用で開いているときに設定を変更
することができます。
・ メニュー選択後は、実行順序の表示指定中であること示すチェックマークがメニュー上に表示
されます。
・ 印刷または印刷プレビュー機能では、この◇を表示しません。
ネットワーク

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 365
■ 実行順序を変更する
1) メニュー<ツール><ネットワークの実行順変更>を選択し、ダイアログ「ネットワークの実行順変
更」を表示します。
2) 表示されたダイアログ「ネットワークの実行順変更」上で、変更したい実行順 No.をマウ
ス選択します。
3) 次のいずれかの方法で、選択中の実行順 No.を移動することで実行順序の指定を変
更します。
・ のボタンをクリックする。
・移動先の実行順 No.を入力後に、ボタン[移動]をクリックする。
・[Alt]キーを押しながら、[↑]、[↓]、[Home]、[End]のキーを押す。
4) ボタン[OK]をクリックします。以上により、指定した順序に従い実行順 No.の表
示が更新されます。
○補足
・ ワークシートに制御文(実行制御命令、または構文命令)が存在する場合、制御文を飛び越え
て実行順序を変更することはできません。
・ ワークシートに制御文(実行制御命令、または構文命令)が存在する場合、プログラムを更新
すると、実行順序が初期化されます。このときは、再度実行順を設定してください。

第 5 章 制御プログラムの作成
6E8C4890 366
■ 実行順序を初期化する
1) タスクエントリから、上書き保存されたプログラムを開きます。
2) メニュー<ツール><ネットワークに実行順を指定する>を選択し、本メニュー上のチェック
マークを外します。
これにより、実行順 No.が初期化され、その表示が更新されます。

5.4 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 367
5.4.16 タブ機能を利用する
タブ機能はエンジニアリングツール バージョン V3.12.0 以降、V4.4.0 以降で利用
可能です。
プログラムエディタ(フルグラフィック)で作成するプログラムは、1 つの POU に 1
枚以上のワークシートを作成できます。通常、プログラムエディタはワークシートを 1
枚だけ表示するため、複数のワークシートが存在する場合は複数のプログラムエディタ
を起動して参照します。
このタブ機能を利用すると、1 つのタブに 1 枚のワークシートを表示するため、複数
のプログラムエディタを起動せずに、タブの切り替え操作で複数枚のワークシートを参
照できます。また、その POU がいくつのワークシートで構成されているかが容易に判
ります。
■ タブ機能を有効にする
プログラムエディタのメニュー<ツール><タブ機能>を選択します。
○補足
・ タブ機能の有効/無効を切り替えるとき、表示中の全てのプログラムエディタ(フルグラフィッ
ク)を自動的に閉じます。
・ ルーチン(Main ルーチン、Action ルーチン、Phase ルーチン)は、別々のプログラムエディタ
を表示します。(1 つのプログラムエディタに混在して表示できません)
・ タブ機能有効時でも、1 つのルーチン内にワークシートが 1 つのときは、タブ機能なしでプログ
ラムエディタを表示します。
・ [ワークシートから開く]で開いたときは、タブ機能なしで別のプログラムエディタを表示し
ます。
また、そのプログラムエディタは読み取り専用で編集はできません。
■ タブ機能有効時の各部の名称と役割
タブ表示・タブ切替 ワークシート情報 ワークシート選択
タブスクロール

第 5 章 制御プログラムの作成
6E8C4890 368
■タブ表示・タブ切替
・ 1 つのタブに 1 つのワークシートを表示します。タブの 大数は実在するワークシー
ト数と同じです。
・ タブ名はワークシート名と同じです。
・ タブの表示順番はワークシートの実行順番号と同じです。
・ タブ名をクリックすると、該当するワークシートを表示します。
○補足
・ ワークシート内に描画している命令シンボルが多い場合、切り替わりに時間を要することがあ
ります。
・ 次の機能は、表示中のワークシートのみ有効で、タブ切り替え後は無効となります。
特に、<アンドゥ>、<リドゥ>、<ネットワークを選択>の情報は、タブ切り替
え時に破棄されますので、ご注意ください。
<印刷プレビュー>、<印刷>、<アンドゥ>、<リドゥ>、<全て選択>、<ネ
ットワークを選択>、
<接点・コイルフォース>、<命令語スワップ>、<データ値モニタ>、<タグ゙計
器>
・ 次の機能はタブ切り替え後も有効です。
<切り取り>、<コピー>、<貼り付け>、<利用できるファンクション>、<利
用できる変数>、
<デバイス変数のプロパティ>、<検索・置換>、<ジャンプ>、<クロスリファレ
ンスリスト>、
<コンパイルエラーリスト>、プログラムのモニタ<開始><停止>、<シーケン
ス操作パネル>
■ワークシート情報
(タブ選択しているワークシートの実行順番号[左側])/(ワークシートの 大数[右
側])を表示します。
■ワークシート選択
・ タブ選択しているワークシートのワークシート名を表示します。
・ マウスでクリックするとワークシート名の一覧を表示します。一覧の中からワーク
シート名を選択すると該当タブに切り替わります。
■タブスクロール
タブ表示部全体をスクロールし、表示されていないタブを表示します。
○補足
・ このタブスクロールを操作しても、選択中のタブは切り替わりません。

5.5 ユーザ・ファンクションを作る
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 369
5.5 ユーザ・ファンクションを作る
■ 仕様を決める
・ ユーザは独自のファンクションを作ることができます。
・ ファンクションについては、「V シリーズのソフトウェアモデル」の「ファンクショ
ン」を参照してください。
・ ここでは、次のような仕様を仮定します。
3 点のプロセス値の加重平均を演算するファンクション。 プロセス値は、実数値。ファンクション名は AVE3。 演算式:y = (K1*x1+K2*x2 + K3*x3 )/3 K1+K2+K3 = 3 であること。
■ ユーザファンクションの作成
ファンクション名が AVE3 のファンクションを作成します。
1) プロダクトツリーを起動し、画面右上でファンクションを使用するシステムをダブ
ルクリックします。画面左下に選択したシステム以下の編集可能なサブフォルダが
表示されます。
2) サブフォルダの「ライブラリ」を選択し、画面右下にライブラリ一覧を表示します。
3) ライブラリ一覧の中の「ワーク」をダブルクリックし、[ライブラリ]画面を表示し
ます。
4) [ライブラリ]画面にて[型名]に作成するファンクション名、AVE3 を入力、[元
の型名]に FUNCTION を入力します。
[種別]で、プログラムエディタの種別(セミグラフィック、テキスト、フルグラフ
ィック)を選択します。必要な場合はコメントを入力します。
5) ボタン[プログラムエディタを開く]にてファンクションの内部作成に移ります。
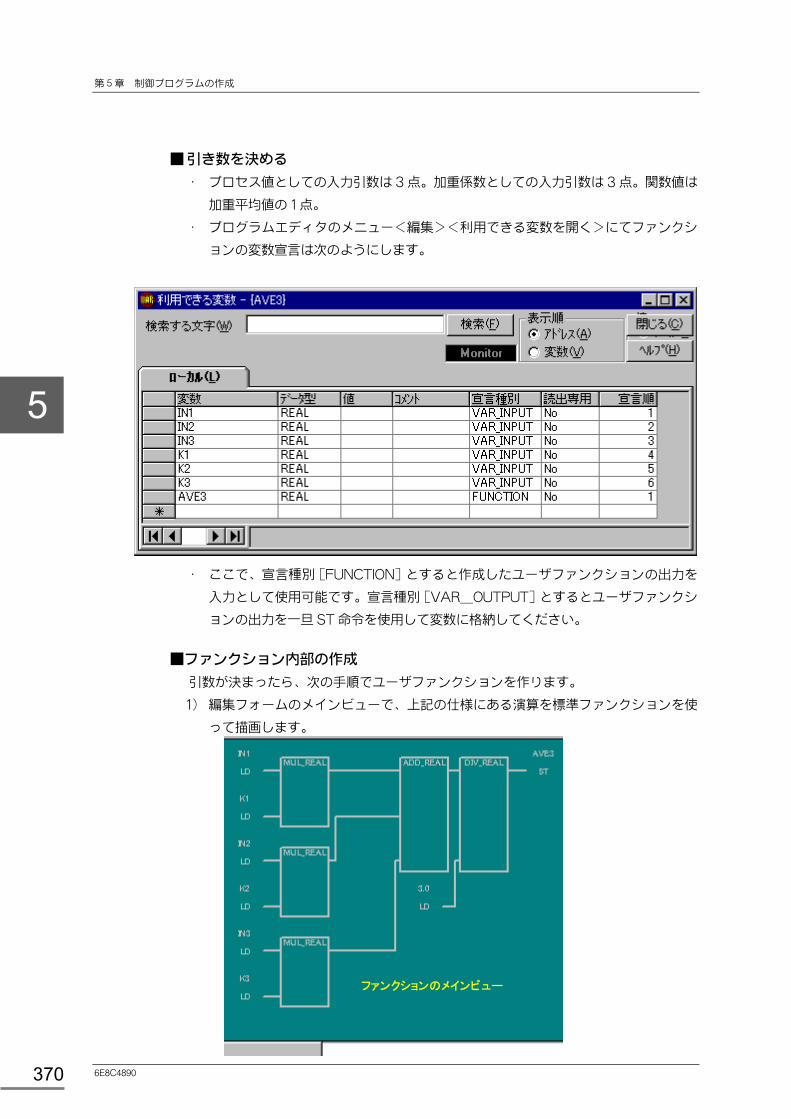
第 5 章 制御プログラムの作成
6E8C4890 370
■ 引き数を決める
・ プロセス値としての入力引数は 3 点。加重係数としての入力引数は 3 点。関数値は
加重平均値の 1 点。
・ プログラムエディタのメニュー<編集><利用できる変数を開く>にてファンクシ
ョンの変数宣言は次のようにします。
・ ここで、宣言種別[FUNCTION]とすると作成したユーザファンクションの出力を
入力として使用可能です。宣言種別[VAR_OUTPUT]とするとユーザファンクシ
ョンの出力を一旦 ST 命令を使用して変数に格納してください。
■ファンクション内部の作成
引数が決まったら、次の手順でユーザファンクションを作ります。
1) 編集フォームのメインビューで、上記の仕様にある演算を標準ファンクションを使
って描画します。
ファンクションのメインビュー

5.5 ユーザ・ファンクションを作る
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 371
2) メニュー<ファイル><上書き保存>または<名前を指定して保存>で一旦保存し
ます。
この時、未定義の変数があれば未定義の変数ダイアログに表示されます。未定義の
ままとしたい変数がある場合は、左端のチェックボックスを外した上で登録ボタン
を押してください。
これでユーザファンクションのファイルが作成されます。
3) ユーザファンクションの命令シンボルを確認するには、「ファンクションを使う」の
項の手順を参照してください。この例の命令シンボルは下記のようになることが確
認できます。
4) 例にあるように、変数宣言にて宣言種別を VAR_INPUT とした変数が入力、
FUNCTION,VAR_OUTPUT とした変数が出力としてファンクションが作成され
ます。また、変数の宣言順にファンクション箱の上から下に入出力が作成されます。
ファンクションを
呼び出したところ
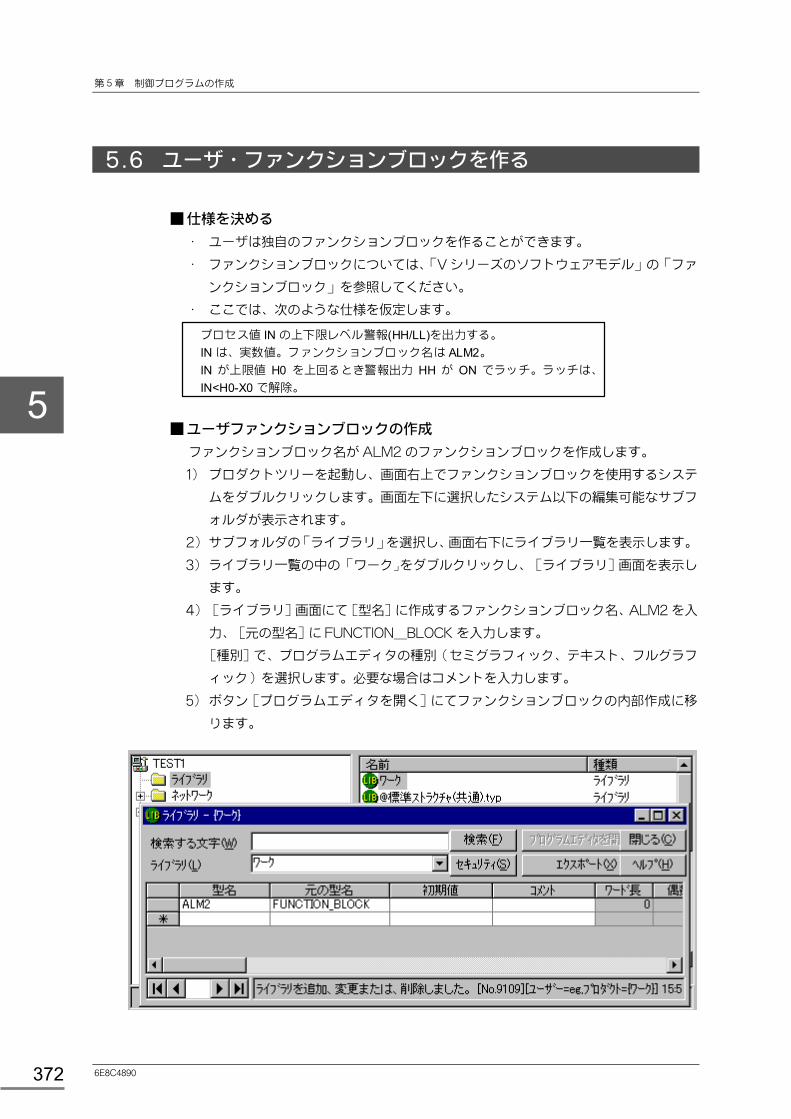
第 5 章 制御プログラムの作成
6E8C4890 372
5.6 ユーザ・ファンクションブロックを作る
■ 仕様を決める
・ ユーザは独自のファンクションブロックを作ることができます。
・ ファンクションブロックについては、「V シリーズのソフトウェアモデル」の「ファ
ンクションブロック」を参照してください。
・ ここでは、次のような仕様を仮定します。
プロセス値 IN の上下限レベル警報(HH/LL)を出力する。
IN は、実数値。ファンクションブロック名は ALM2。
IN が上限値 H0 を上回るとき警報出力 HH が ON でラッチ。ラッチは、
IN<H0-X0 で解除。
■ ユーザファンクションブロックの作成
ファンクションブロック名が ALM2 のファンクションブロックを作成します。
1) プロダクトツリーを起動し、画面右上でファンクションブロックを使用するシステ
ムをダブルクリックします。画面左下に選択したシステム以下の編集可能なサブフ
ォルダが表示されます。
2) サブフォルダの「ライブラリ」を選択し、画面右下にライブラリ一覧を表示します。
3) ライブラリ一覧の中の「ワーク」をダブルクリックし、[ライブラリ]画面を表示し
ます。
4) [ライブラリ]画面にて[型名]に作成するファンクションブロック名、ALM2 を入
力、[元の型名]に FUNCTION_BLOCK を入力します。
[種別]で、プログラムエディタの種別(セミグラフィック、テキスト、フルグラフ
ィック)を選択します。必要な場合はコメントを入力します。
5) ボタン[プログラムエディタを開く]にてファンクションブロックの内部作成に移
ります。

5.6 ユーザ・ファンクションブロックを作る
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 373
■ 引き数を決める
・ 入力引数は、プロセス値 IN,上限値 H0,下限値 L0、不感帯 X0 の 4 点。
・ 出力引数は、上限警報出力 HH, 下限警報出力 LL の 2 点。
・ プログラムエディタのメニュー<編集><利用できる変数を開く>にてファンクシ
ョンブロックの引数宣言文は次のようにします。
■ ファンクションブロック内部の作成
引数が決まったら、次の手順でユーザファンクションブロックを作ります。
1) 編集フォームのメインビューで、上記の仕様にある演算を標準ファンクションを使
って描画します。

第 5 章 制御プログラムの作成
6E8C4890 374
2) ファンクションブロック内のローカル変数宣言を追加します。
ここでは、ファンクションブロック「RS」を使っているので、変数宣言は次のよう
にします。
3) メニュー<ファイル><上書き保存>で一旦保存します。
この時、未定義の変数があれば未定義の変数ダイアログに表示されます。未定義の
ままとしたい変数がある場合は、左端のチェックボックスを外した上で登録ボタン
を押してください。
これでユーザファクンションブロックのファイルが作成されます。
4) ユーザファンクションブロックの命令シンボルを確認するには、「ファンクションを
使う」の項の手順を参照してください。この例の命令シンボルは下図のようになり
ます。

5.7 Tag シンボルを使う
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 375
5.7 Tag シンボルを使う
TagNo.を使ってプログラミングする方法を説明します。
Tag シンボルを使う:
タグエディタで登録した TagNo は、コントローラ変数として下記のように登録されま
す。
!{TagNo}_# (#:0~3)
例:DS 型の PV:指示計の場合
!FI000_0 :PV_PARA の変数
!FI000_1 :PV_DATA の変数
プログラムエディタおよび、データビュー等で Tag シンボルを使用するときは、先頭
の‘!’および、末尾の‘_#’を取り除いた{TagNo}を指定してください。
例:DS 型の PV:指示計の場合
FI000.PV
配列型メンバーの表記方法:
TAGNo や変数には配列型のメンバーを持つものがあります。
例:XPB100.FI[0] :押しボタン XPB100 の第 1 表示灯の状態
XPB100.FI[1] :押しボタン XPB100 の第 2 表示灯の状態
XPB100.FO[0] :押しボタン XPB100 の第 1 ボタンの状態
XPB100.FO[1] :押しボタン XPB100 の第 2 ボタンの状態
配列型のメンバーの添え字は 0 から開始します。
この場合、押しボタンの 1 から始まる番号と一致させるため、次の表記も可能です。
例:XPB100.FI1 :押しボタン XPB100 の第 1 表示灯の状態. XPB100.FI[0]と同じ
XPB100.FI2 :押しボタン XPB100 の第 2 表示灯の状態. XPB100.FI[1]と同じ
XPB100.FO1 :押しボタン XPB100 の第 1 ボタンの状態. XPB100.FO[0]と同じ
XPB100.FO2 :押しボタン XPB100 の第 2 ボタンの状態. XPB100.FO[1]と同じ

第 5 章 制御プログラムの作成
6E8C4890 376
5.8 プログラムを再利用する
一度作成した制御プログラムは、その一部または全部を再利用したいことがあります。
再利用は正しく行えば、設計効率やコントローラの利用効率を飛躍的に高めることが
できます。
ここでは、さまざまな再利用の操作方法を説明します。
■ グラフィックをコピーする
・ グラフィック描画が似ているときは、もとのグラフィックをコピーし、修正します。
・ グラフィックのコピー/ペーストの仕方は「プログラムを描画する」の項を参照し
てください。
・ プログラムエディタは、2つ以上起動することもできます。
・ グラフィックのコピー先は、同じビュー、プロジェクト内の異なるビュー、異なる
プロジェクトのビューいずれも可能です。
■ エクスポート
・ 「11.2 ライブラリのインポート/エクスポートを実行する」を参照してください。
■ インポート
・ 「11.2 ライブラリのインポート/エクスポートを実行する」を参照してください。
■ システムを丸ごとコピーする
・ 同じプロダクトパスの管理下で、システムひとつを丸ごとコピーすることができま
す。
1) [プロダクトビュー]を起動します。
2) コピー元のシステムを選択して、メニュー<編集><コピー>を実行します。

5.8 プログラムを再利用する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 377
3) 画面左上の[システム]を選択して、メニュー<編集><貼りつけ>を実行します。
4) システム名を入力し、ボタン[OK]をクリックします。
5) 画面右上のシステム一覧の中に、複写したシステム名が追加されているので、ダブ
ルクリックし、システム内部の編集を行います。

第 5 章 制御プログラムの作成
6E8C4890 378
5.9 システムを一括してコンパイルする
システム単位に下記のプロダクトを一括してコンパイルすることができます。
・ユーザ定義型
・コントローラ変数
・プログラム
・タスクエントリ
■ 一括コンパイルを開く
1) [プロダクトツリー]にて、システムを選択し、メニュー<ファイル><一括コンパ
イル>を選択します。
■ 一括コンパイルを開始する
1) [一括コンパイル]画面を表示したまま、[プロダクトツリー]を終了します。
C/S 版の場合は、全てのユーザが[プロダクトツリー]を終了します。
2) [一括コンパイル]にて、[開始]ボタンをクリックし、一括コンパイルを開始しま
す。
一括コンパイルを停止する場合は、[停止]ボタンをクリックします。
一括コンパイル中は、コンパイル結果をログとして逐次表示します。

5.9 システムを一括してコンパイルする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 379
ログは、次のように色分けされています。
色 意味
青 コンパイルが完了した
赤 コンパイルエラーが有った
[印刷]ボタンをクリックするとログの内容がプリントアウトされます。
3) 一括コンパイルが完了すると終了メッセージが表示されます。この後、プロダクト
ツリーを起動して、システムを利用することができます。
●注記
・ 一括コンパイル中は、プロダクトツリーを開いて各種編集モニタを行うことは可能です。しか
し、一括コンパイルが終了して、生成結果を元のシステムに反映させたとき、既存の変更は失
われることに注意してください。

第 5 章 制御プログラムの作成
6E8C4890 380
5.10 コントローラを一括してコンパイルする
コントローラ単位に下記のプロダクトを一括してコンパイルすることができます。
・コントローラ変数
・プログラム
・タスクエントリ
■ コントローラ単位で一括してコンパイルする
1) [プロダクトツリー]にて、コントローラを選択後、メニュー<ファイル><一括
コンパイル>を選択、またはマウス右ボタンにて表示されたポップアップメニュー
上で<一括コンパイル>を選択すると、[一括コンパイル]画面が表示されます。
2) 続けて、コントローラを選択後、メニュー<ファイル><一括コンパイル>を選択、
または[一括コンパイル]の[要求リスト]にコントローラをドラッグ&ドロップ
すると、[要求リスト]に後置追加されます。
3) [開始]ボタンを押すと、[要求リスト]の先頭のコントローラから順次コンパイル
を実行します。
コンパイルの終了したコントローラは、行の左端に”レ”印を付けます。
4) コンパイル開始後も、2)の操作で[一括コンパイル]の[要求リスト]に後置追加
できます。
5.10 コントローラを一括してコンパイルする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 381
一括コンパイル中は、コンパイル結果をログとして逐次表示します。
ログは、次のように色分けされています。
色 意味
青 コンパイルが完了した
赤 コンパイルエラーが有った
・ [中止]ボタン:実行中であっても一括コンパイルを中止することができます。
・ [削除]ボタン:[一括コンパイル]の[要求リスト]に誤って、要求を登録したよ
うな場合には、削除したい要求を選択後、[削除]ボタンを押して[要求リスト]よ
り削除することができます。
■ 一括コンパイル結果を印字する
[印刷]ボタンをクリックします。
●注記
・ 対象コントローラのプログラムを他のユーザが編集中のときは、そのコントローラの一括コン
パイルは実行できません。

第 5 章 制御プログラムの作成
6E8C4890 382
5.11 変更時の影響箇所を検索する
変数やプログラムの改造時に、ある変更が他のどの箇所に影響するかを検索すること
ができます。
■ 影響箇所を検索する
検索対象は以下のとおりです
画面 対象
ライブラリ データ型
構造体 メンバー
I/O 変数 I/O 変数
コントローラ変数 コントローラ変数(SW/DW/User)
ステーション変数 ステーション変数(出力/入力)
ネットワーク変数 ネットワーク変数(出力/入力)
利用できる変数 コントローラ変数、I/O 変数、ステーション変数、ネットワーク変数
POU エントリ POU
1) 上記の各画面において、ボタン<影響箇所を検索>をクリックします。
・影響箇所の表記の書式は以下のとおりです。
変更波及個所 表記
ユーザ定義型 Datatype={データ型:コメント}
POU 型 POUtype={データ型:元のデータ型:コメント}
ネットワーク変数 NetVar={ネットワーク No.:ネットワーク名}-{送信ブロック No.}-{変数名:コメント}
ステーション変数 StnVar={ステーション名}-{S:コントローラ名}-{メモリ種別}-{変数名:コメント}
コントローラ変数 CntVar={ステーション名}-{S:コントローラ名}-{メモリ種別}-{変数名:コメント}
ファンクションブロック Fbk={ステーション名}-{S:コントローラ名}- POU 名:POUNo.:アクション名:PPP>RRR:CC
ファンクション Fun={ステーション名}-{S:コントローラ名}- POU 名:POUNo.:アクション名:PPP>RRR:CC
プログラム Prg={ステーション名}-{S:コントローラ名}-TTEEE:アクション名:PPP>RRR:CC
例:Prg={Stn1}-{1:S3PU55}-MS000:ACT_1_B:0
01-001:01

5.11 変更時の影響箇所を検索する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 383
記号の意味
記号 意味 種類
S スロット番号 -
TT タスク種別 EV:イベントタスク SS:超高速タスク IP :割り込みタスク HS:高速スキャンタスク MS:メインスキャンタスク BG:バックグランドタスク
EEE タスク番号 -
セミグラフィック ページ番号
テキスト ページ番号
PPP ページ番号
フルグラフィック ワークシート No.
> アクション -:参照(Read) >:代入(Write) S :設定(Set) R :設定(Reset)
RRR 行番号 -
CC 列番号 -
・ 影響箇所の検索結果を印字する
上記の<影響箇所の検索>画面において、ボタン<印刷>をクリックします。
・ プログラムを開く
影響箇所の検索に示されたプログラムを開くには、次の手順で行います。
1) 影響箇所の検索の注目する行をクリックします。
2) ボタン[開く]をクリックします。
■ 影響箇所を検索してテキストファイルに出力する
検索対象は、次のとおりです。
プロダクト 検索対象
ネットワーク ネットワーク変数
ステーション ステーション変数、I/O変数
コントローラ コントローラ変数
1) プロダクトツリーで、目的のプロダクトを選択して、メニュー<ファイル><変数リファレン
スを出力する>を選択します。

第 5 章 制御プログラムの作成
6E8C4890 384
ネットワーク
ステーション
コントローラ
2) 画面「変数リファレンスを出力する」が表示されます。
3) 出力先を確認します。
出力先のフォルダを変更したいときはボタン「…」をクリックして、変更します。
出力先のファイル名を変更することはできません。
4) 出力対象を確認します。
出力する必要が無い項目のチェックボックスを OFF にします。
5) ボタン「開始」をクリックします。
変数のリファレンスを出力先に作成し、結果を表示します。
・出力形式
次の形式で出力します。各項目はタブコードで区切られます。
[モジュール名 / 項目名]
変数名 1<Tab> 参照先1<Tab> 参照先2<Tab> 参照先3<Tab>…参照先 N
変数名 2<Tab> 参照先1<Tab> 参照先2<Tab> 参照先3<Tab>…参照先 N
:
変数名 n<Tab> 参照先1<Tab> 参照先2<Tab> 参照先3<Tab>…参照先 N

5.12 プログラムにセキュリティを設定する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 385
5.12 プログラムにセキュリティを設定する
○補足
・以下の説明は、V2.6 以降の V-Tool に適用されます。
■ プログラムセキュリティ
ライブラリの単位で、作成したプログラム(プログラム/ファンクション/ファンクシ
ョンブロック/構造体)に対するアクセスレベルを設定することができます。
プログラムのアクセスレベルには、下記があります。
・アクセス不可:プログラムの利用/閲覧/編集不可
・利用可能:プログラムの利用可能。閲覧/編集不可。
・閲覧可能:プログラムの利用/閲覧可能。編集不可。
・編集可能:プログラムの利用/閲覧/編集可能。
上記のアクセスレベルは、V-Tool にログインするユーザ毎に設定できます。
ライブラリにアクセスレベルを設定していない場合は、そのライブラリ内のプログラム
に対して、すべてのユーザが編集可能の権限を持ちます。
ライブラリにユーザ登録している場合、そのユーザ以外はそのライブラリおよび、プロ
グラムにアクセスすることはできません。
■ ライブラリの管理者を登録する
・ライブラリ画面を開き、[セキュリティ]ボタンを押します。
・確認ダイアログが表示されますので、[はい]ボタンを押します。
・管理者のユーザ名とパスワードを入力し、[OK]ボタンを押します。

第 5 章 制御プログラムの作成
6E8C4890 386
○補足
・ユーザ名,パスワードは1文字以上、32文字以下で有効です。(半角文字で 32 文字、全角文
字で 16 文字までです。)
・? “ / \ < > * | : ; (スペース) (タブ) (改行) 等の文字は使用できません。
■ ユーザ毎のアクセスレベルを設定する
・メニュー<メンバー><追加>を実行します。
・V-Tool にログインするユーザのユーザ名とパスワードを入力します。
・プログラムのアクセスレベル(利用可能/閲覧可能/編集可能)を設定します。
・[OK]ボタンを押します。

5.12 プログラムにセキュリティを設定する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 387
■管理者を変更する
・ プログラム セキュリティ画面で管理者のユーザ名とパスワードを入力し、[OK]ボ
タンを押します。
・ メニュー<管理者><変更>を実行します。
・ 新しい管理者のユーザ名とパスワードを入力し、[OK]ボタンを押します。
■メンバーを変更する
・ ユーザ名を選択し、メニュー<メンバー><変更>を実行します。
・ ユーザ名とパスワードを入力します。
・ プログラムのアクセスレベル(利用可能/閲覧可能/編集可能)を設定します。
・ [OK]ボタンを押します。
■メンバーを削除する
・ ユーザ名を選択し、メニュー<メンバー><削除>を実行します。
■セキュリティを削除する
・ 管理者のユーザ名とパスワードを入力し、[OK]ボタンを押します。
・ メニュー<管理者><セキュリティの削除>を実行します。
○補足
・ ユーザ名を照合するとき、大文字/小文字を区別しません。
・ パスワードを照合するとき、大文字/小文字を区別します。
・ ユーザ名とパスワードは忘れないようにしてください。

第 5 章 制御プログラムの作成
6E8C4890 388
5.13 変数名の重複を検索する
変数名(ローカル変数とグローバル変数)の重複を検索することができます。
プログラムで利用している変数名を重複検索の対象とし、ローカル変数、コントローラ
変数、I/O変数、ステーション変数、ネットワーク変数において重複を検出します。
下図では、タスク MS000、および MS001 のプログラム上で使用しているローカル
変数 LVL_001 が、コントローラ変数、ステーション変数、ネットワーク変数で重複し
て使用されている例を示しています。これらの重複を検出することができます。
Stn1(ステーション)LVL_001
Stn2
Net1(ネットワーク)LVL_001
Cn1(コントローラ)LVL_001
Cnt2 Cnt3 Cnt4
MS000LVL_001
MS001LVL_001
■ 制約事項
重複検索処理中に変数が変更された場合、検索結果の整合性を保証できません。
変更後に再度検索を実行してください。
■ 変数名の重複を検索する
1) [プロダクトツリー]で一つのコントローラを選択後、メニュー<ファイル><変
数名の重複検索>を選択、またはマウス右ボタンにて表示されたポップアップメニ
ュー上で<変数名の重複検索>を選択すると、変数名の重複検索画面が表示されま
す。
2) 続けて、一つのコントローラを選択後、メニュー<変数名の重複検索>を選択、ま
たは、[変数名の重複検索]の[要求リスト]に一つのコントローラをドラッグ&ド
ロップすると、[要求リスト]に後置追加されます。

5.13 変数名の重複を検索する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 389
3) [開始]ボタンを押すと、[要求リスト]の先頭のコントローラから順次検索を実行
します。
検索が終了したコントローラは、行の左端に“レ”印を付けます。
ここで、一つのコントローラ内のプログラムで利用されている変数の重複チェック
は、以下の順に実行します。
コントローラ変数→I/O変数→ステーション変数→ネットワーク変数
4) 検索を実行中でも、2)の操作で[変数名の重複検索]の[要求リスト]に後置追加
することができます。
・表示項目
ローカル変数 LCL={変数名}-{データ型}-{コメント}-{ステーション名:モデル}-{スロット No.:コントローラ名}-{POU 名:POUNo.}-{データ型:コメント}
コントローラ変数 CNT={変数名}-{ワードNo.:ビットNo.}-{データ型}-{コメント}-{ステーション名:モデル}-{スロット No.:コントローラ名}-{メモリ種別}
I/O変数 I/O={変数名}-{IO ワード No.: ビット No.}-{データ型}-{コメント}-{モジュール名:ハードアドレス}
ステーション変数 STN={変数名}-{ワード No.:ビット No.}-{データ型}-{コメント}-{ステーション名:モデル}
ネットワーク変数 NET={変数名}-{ワード No.:ビット No.}-{データ型}-{コメント}-{ネットワーク No.:ネットワーク名}-{送信ブロック No}

第 5 章 制御プログラムの作成
6E8C4890 390
・ {ステーション名}-{コントローラ名} : 「重複した変数」のコントローラ毎の先
頭に緑色で表示します。
・ 区切り線 '---': 検索された変数毎に区切りを表します。
・ [中止]ボタン: 実行であっても検索を中止することができます。
・ [削除]ボタン: [変数名の重複検索]の[要求リスト]に誤ってコントローラ
を登録したような場合には、削除したいコントローラを選択後、[削除]ボタンを押
して[要求リスト]より削除することができます。
■ 変数名の重複検索結果を印字する
[印刷]ボタンをクリックします。

5.14 変数アドレスの重複を検索する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 391
5.14 変数アドレスの重複を検索する
ある変数アドレスに対して BOOL 型、WORD 型などの変数が重複して登録されてい
るかを検索することができます。
コントローラ変数、I/O変数、ステーション変数、ネットワーク変数においてア
ドレスの重複を検出します。
以下の重複パターンを検出します。
・BOOL 型同士の場合: ビットアドレスの重複
・BOOL 型以外の場合の場合: ワードアドレスの重複
・BOOL 型以外と BOOL 型の場合: ワードアドレスの重複
ここで、’BOOL 型以外’には、基本データ型のほか、配列やユーザデータ型(構造
体)を含みます。
■ 制約事項
重複検索処理中に変数が変更された場合、検索結果の整合性は保証できません。
■ 変数アドレスの重複を検索する
1) [プロダクトツリー]で一つのネットワーク、または一つのステーション、または
一つのコントローラを選択後、メニュー<ファイル><変数アドレスの重複検索>
を選択、またはマウス右ボタンにて表示されたポップアップメニュー上で<変数ア
ドレスの重複検索>を選択すると、[変数アドレスの重複検索]画面が表示されます。
2) 続けて、一つのネットワーク、または一つのステーション、または一つのコントロ
ーラを選択後、メニュー<ファイル><変数アドレスの重複検索>を選択、または、
[変数アドレスの重複検索]の[要求リスト]に一つのネットワーク 、または一つの
ステーション、または一つのコントローラをドラッグ&ドロップすると、[要求リス
ト]に後置追加されます。
3) [開始]ボタンを押すと、[要求リスト]の先頭の要求から順次検索を実行します。
検索が終了したコントローラは、行の左端に”レ”印を付けます。
4) 検索開始後も、2)の操作で、[変数アドレスの重複検索]の[要求リスト]に後置追
加できます。
ここで、選択した対象毎の検索内容の違いは以下のとおりです。
・ 一つのネットワークの場合:
・ スキャンメモリ上でワードNo.、ビット No.のアドレス重複を検索します。
・ I/Oモジュール毎のI/OワードNo.、ビット No.のアドレス重複を検索します。
・ 一つのステーションの場合:
・ ステーションメモリ上でワードNo.、ビット No.のアドレス重複検索を検索します。
・ I/Oモジュール毎のI/OワードNo.、ビット No.のアドレス重複を検索します。
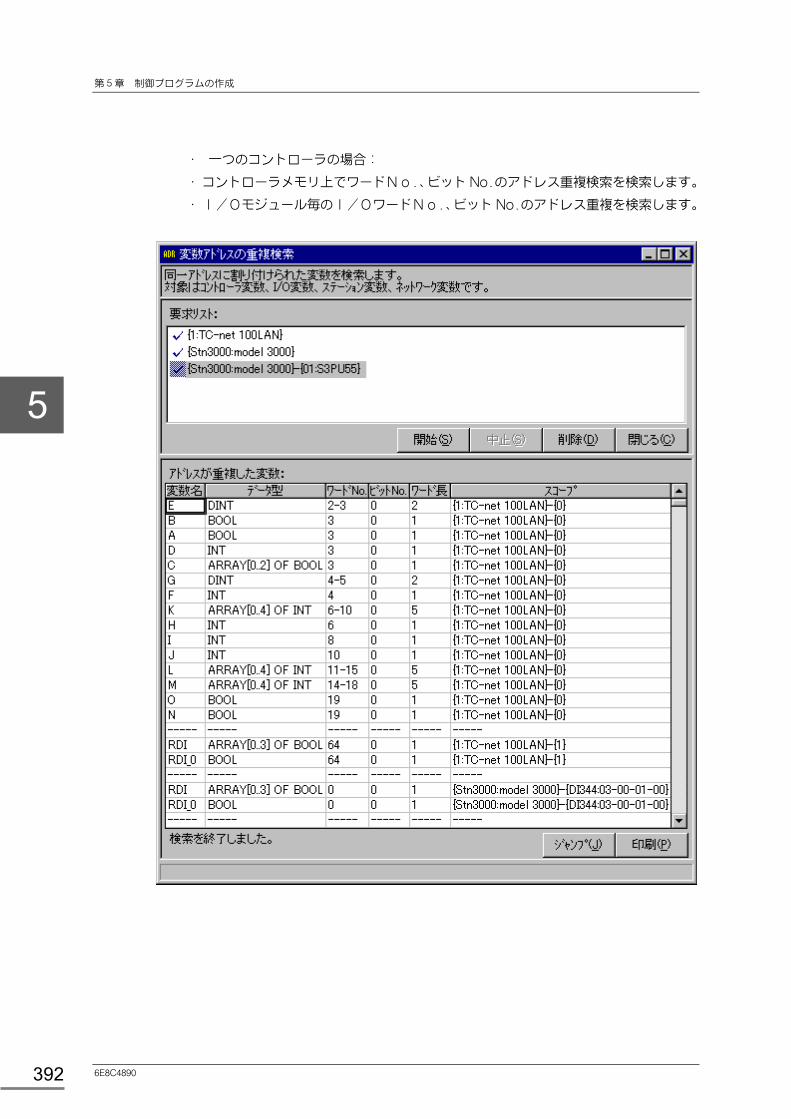
第 5 章 制御プログラムの作成
6E8C4890 392
・ 一つのコントローラの場合:
・ コントローラメモリ上でワードNo.、ビット No.のアドレス重複検索を検索します。
・ I/Oモジュール毎のI/OワードNo.、ビット No.のアドレス重複を検索します。

5.13 変数名の重複を検索する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 393
・表示項目:
項目「スコープ」の書式は、以下のとおりです。
ネットワーク変数 {ネットワーク No.:ネットワーク名}-{送信ブロック No.}
ステーション変数 {ステーション名:モデル}
コントローラ変数 {ステーション名:モデル}-{スロット No.:コントローラ名}-{メモリ種別}
I/O変数 (システムスコープの場合) {ステーション名:モデル}-{モジュール名:ハードアドレス}
I/O変数 (ステーションスコープの場合) {ステーション名:モデル}-{モジュール名:ハードアドレス}
I/O変数 (コントローラスコープの場合) {ステーション名:モデル}-{スロット No.:コントローラ名}-{モジュール名:ハードアドレス}
・ [中止]ボタン: 実行中であっても検索を中止することができます。
・ [削除]ボタン: [変数アドレスの重複検索]]の[検索要求リスト]に誤って、要
求を登録したような場合には、削除したい検索要求を選択後、[削除]ボタンを押し
て[要求リスト]より削除することができます。
・ [ジャンプ]ボタン: 変数画面を自動的に展開表示し、画面上で選択している変数
の登録内容を確認することができます。
■ 変数名の重複検索結果を印字する
[印刷]ボタンをクリックします。

第 5 章 制御プログラムの作成
6E8C4890 394
5.15 変数の重複出力をチェックする
プログラム上で同一変数に対して重複出力されている箇所を検出します。
対象はローカル変数、コントローラ変数、I/O変数、ステーション変数、ネットワ
ーク変数です。
■ 制約事項
重複出力チェック中にプログラムが変更された場合、チェック結果の整合性は保証でき
ません。
変更後に再度チェックしてください。
また、同一アドレスに別の名前で定義された変数との重複チェックは行えません。
入出力変数は、出力変数としてチェックします。
■ 変数の重複出力をチェックする
1) [プロダクトツリー]で一つのコントローラを選択後、メニュー<ファイル><変
数の重複出力チェック>を選択、またはマウス右ボタンにて表示されたポップアッ
プメニュー上で<変数の重複出力チェック>を選択すると、変数の重複出力チェッ
ク画面が表示されます。
2) 続けて、一つのコントローラを選択後、メニュー<変数の重複出力チェック>を選
択、または、[変数の重複出力チェック]の[要求リスト]に一つのコントローラを
ドラッグ&ドロップすると、[要求リスト]に後置追加されます。
3) [開始]ボタンを押すと、オプションの画面が表示されますので、必要な項目をチ
ェックします。
4) [OK]ボタンを押すと、[要求リスト]の先頭のコントローラから順次チェックを
実行します。
チェックが終了したコントローラは、行の左端に“レ”印を付けます。

5.15 変数の重複出力をチェックする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 395
5) チェック開始後も、2)の操作で[変数の重複出力チェック]の[要求リスト]に後
置追加することができます。
・表示項目
ネットワーク変数 NET={変数名}-{データ型}:アクション名:PPP>RRR:CC ステーション名:S:POU 名:POUNo.:アクション名:PPP>RRR:CC
ステーション変数 STN={変数名}-{データ型}:アクション名:PPP>RRR:CC ステーション名:S:POU 名:POUNo.:アクション名:PPP>RRR:CC
コントローラ変数 CNT={変数名}-{データ型}:アクション名:PPP>RRR:CC POU 名:POUNo.:アクション名:PPP>RRR:CC
ローカル変数 LCL={変数名}-{データ型}:アクション名:PPP>RRR:CC アクション名:PPP>RRR:CC

第 5 章 制御プログラムの作成
6E8C4890 396
記号の意味
記号 意味 種類
S スロット番号 -
セミグラフィック ページ番号
テキスト ページ番号
PPP ページ番号
フルグラフィック ワークシート No.
> アクション -:参照(Read) >:代入(Write) S :設定(Set) R :設定(Reset)
RRR 行番号 -
CC 列番号 -
・ {ステーション名}-{コントローラ名}: 「重複出力された変数」のコントローラ毎の先頭
に緑色で表示します。
・ {ステーション名}-{コントローラ名}-{POU 名:POUNo}: 「重複出力された変
数」の POU 毎の先頭に緑色で表示します。
・ 区切り線 '---': 1つの POU のチェックが終わる毎に区切りを表示します。
・ [中止]ボタン: 実行中であってもチェックを中止することができます。
・ ラを登録したような場合には、削除したいコントローラを選択後、[削除]ボタンを
押して[要求リスト]より削除することができます。
■ 変数の重複出力チェック結果を印字する
・印刷ボタンをクリックします。

5.16 変数の入出力をチェックする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 397
5.16 変数の入出力をチェックする
プログラム上で以下の変数が利用されている箇所を検出します。
・出力無しで入力のみの変数(接点/ロードの変数)
・出力のみで入力無しの変数(コイル/ストアの変数)
チェック対象はローカル変数、コントローラ変数です。
変数 チェック対象
ローカル変数 ○
コントローラ変数(User,DW,SW) ○
ステーション変数 -
ネットワーク変数 -
コントローラスコープのI/O変数 -
ステーションスコープのI/O変数 -
システムスコープのI/O変数 -
■ 制約事項
出力無し入力、入力無し出力チェック中にプログラムが変更された場合、チェック結果
の整合性は保証できません。
変更後に再度チェックを実行してください。
テーブル転送命令(TMOV 等)による入出力はチェックできません。
メモリに対する出力無し入力変数、入力無し出力変数のチェックは行いません。
コントローラ変数(DW,SW)を参照していた場合、チェック結果が大量に出る場合があ
ります。
入出力変数は、チェックの対象から除外します。
■ 変数の入出力をチェックする
1) [プロダクトツリー]で一つのコントローラを選択後、メニュー<ファイル><変
数の入出力チェック>を選択、またはマウス右ボタンにて表示されたポップアップ
メニュー上で<変数の入出力チェック>を選択すると、変数の出力無し入力チェッ
ク画面が表示されます。
2) 続けて、一つのコントローラを選択後、メニュー<変数の入出力チェック>を選択、
または、[変数の入出力チェック]の[要求リスト]に一つのコントローラをドラッ
グ&ドロップすると、[要求リスト]に後置追加されます。
3) [開始]ボタンを押すと、オプションの画面が表示されますので、必要な項目をチ
ェックします。

第 5 章 制御プログラムの作成
6E8C4890 398
4) [OK]ボタンを押すと、[要求リスト]の先頭のコントローラから順次チェックを
実行します。
出力無しで入力された変数をチェック後、入力無しで出力された変数のチェックを
行います。
出力無しで入力された変数のチェック結果は、タブ[出力無しで入力のみの変数]で
表示します。
入力無しで出力された変数のチェック結果は、タブ[出力のみで入力無しの変数]で
表示します。
チェックが終了したコントローラは、行の左端に“レ”印を付けます。
5) チェック開始後も、2)の操作で[変数の入出力チェック]の[要求リスト]に後置
追加できます。

5.16 変数の入出力をチェックする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 399
・表示項目
コントローラ変数 CNT={変数名}-{データ型}:アクション名:PPP>RRR:CC POU 名:POUNo.:アクション名:PPP>RRR:CC
ローカル変数 LCL={変数名}-{データ型}:アクション名:PPP>RRR:CC アクション名:PPP>RRR:CC
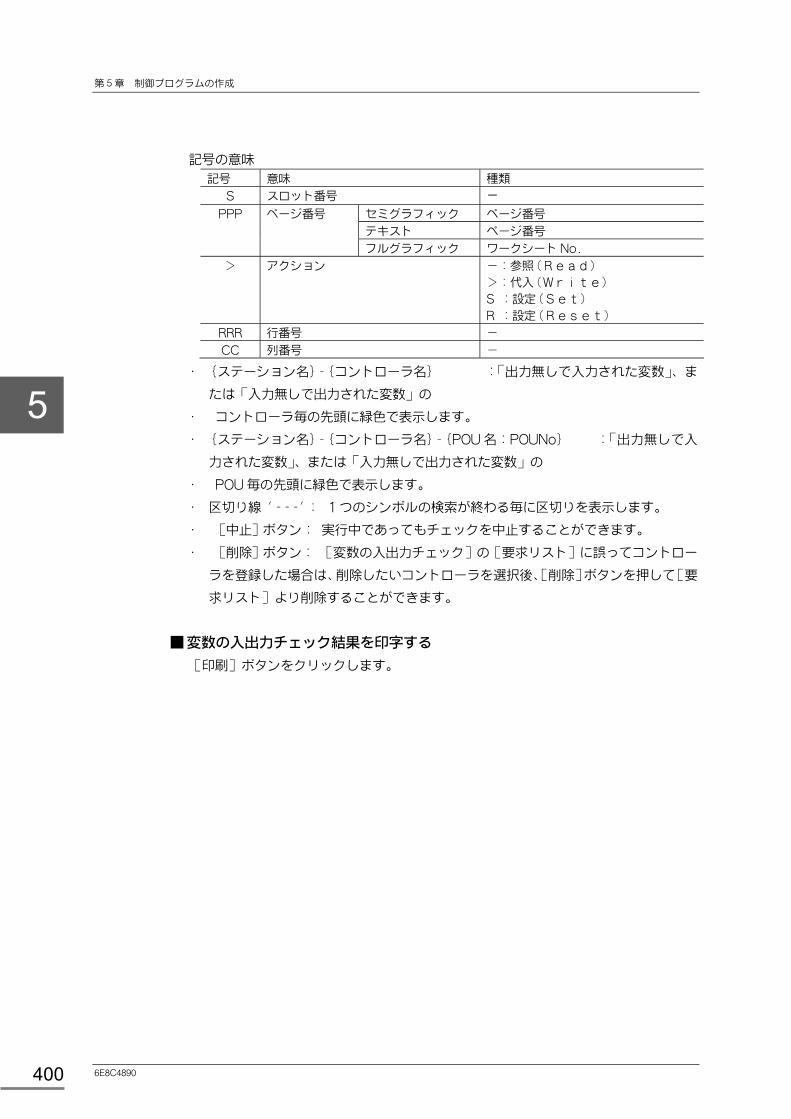
第 5 章 制御プログラムの作成
6E8C4890 400
記号の意味
記号 意味 種類
S スロット番号 -
セミグラフィック ページ番号
テキスト ページ番号
PPP ページ番号
フルグラフィック ワークシート No.
> アクション -:参照(Read) >:代入(Write) S :設定(Set) R :設定(Reset)
RRR 行番号 -
CC 列番号 -
・ {ステーション名}-{コントローラ名} :「出力無しで入力された変数」、ま
たは「入力無しで出力された変数」の
・ コントローラ毎の先頭に緑色で表示します。
・ {ステーション名}-{コントローラ名}-{POU 名:POUNo} :「出力無しで入
力された変数」、または「入力無しで出力された変数」の
・ POU 毎の先頭に緑色で表示します。
・ 区切り線 '---': 1つのシンボルの検索が終わる毎に区切りを表示します。
・ [中止]ボタン: 実行中であってもチェックを中止することができます。
・ [削除]ボタン: [変数の入出力チェック]の[要求リスト]に誤ってコントロー
ラを登録した場合は、削除したいコントローラを選択後、[削除]ボタンを押して[要
求リスト]より削除することができます。
■ 変数の入出力チェック結果を印字する
[印刷]ボタンをクリックします。

5.17 カスタムシンボルを使う
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 401
5.17 カスタムシンボルを使う
カスタムシンボルとは、IEC61131-3 の LD/FBD/SFC の命令シンボルではない独
自の外観を定義したグラフィックシンボルです。
カスタムシンボルには、命令実行を伴う<機能シンボル>と、命令実行を伴わない<
非機能シンボル>があります。
カスタムシンボルは、「エンジニアリングツール3」 Ver。3。1。0 以降で、利用,
作成可能です。
■ 既存のカスタムシンボル
すでに用意されているカスタムシンボルは次のとおりです。
カスタムシンボル名 カスタムシンボル 等価なファンクションブロック 備考
dsPID RSV
MV
dsPID
TRC
TAGRPV
TR
SVP
PVP
RSV
dsPID
TRCTR
SVPPVP
TAGRPV
MV
PID または SPI 調節計
dsMA RMV
MV
dsMA
TRC
TAGRPV
TR
SVP
PVP
RMV
dsMA
TRCTR
SVPPVP
TAGRPV
MV
MA 操作器
dsRS RSV
MV
dsRS
TRC
TAGRPV
TR
SVP
PVP
RSV
dsRS
TRCTR
SVPPVP
TAGRPV
MV
比率設定器

第 5 章 制御プログラムの作成
6E8C4890 402
カスタムシンボル名 カスタムシンボル 等価なファンクションブロック 備考
dsPIDFF RSV
MV
dsPIDFF
TAGRPV
SVP
PVP
TRC
TR
GAN
FFS
FFD
RSV
dsPIDFF
TRCTRGANFFSFFD
SVPPVP
TAGRPV
MV
FF 補償入力付き PID または SPI 調節計
○補足
・ dsPID,dsMA,dsRS,dsPIDFF のファンクションブロックを使用するには V-Tool のアドイン
パッケージ[新計装 FB ライブラリ]のライセンスが必要です。
カスタムシンボル名 カスタムシンボル 等価なファンクションブロック 備考
AND_BOOL
AND_BOOL
論理積。 入力可変2~15点。
OR_BOOL
OR_BOOL
論理和。 入力可変2~15点。
NOT_BOOL X I
論理否定。
SR
SR
Q1S1
R S1
SR
RQ1
セット優先フリップフロップ。
RS
SR
Q1S
R1 Q1S
RS
R1
リセット優先フリップフロップ。

5.17 カスタムシンボルを使う
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 403
カスタムシンボル名 カスタムシンボル 等価なファンクションブロック 備考
TON_100MS
IN
PT
Q
ET
IN
TON_100MS
PTQ
ET
オンディレイ 100ms タイマ。 1 カウントは 100ms。
TOF_100MS
IN
PT
Q
ET
IN
TOF_100MS
PTQ
ET
オフディレイ 100ms タイマ。 1 カウントは 100ms。
Rising_Edge
立ち上がり検出。
Falling_Edge
立ち下り検出。
Valve
なし 調節弁等の表示。 非機能シンボルです。
Sensor
なし センサ、伝送器等の表示。 非機能シンボルです。

第 5 章 制御プログラムの作成
6E8C4890 404
■ カスタムシンボルの描画
・ [プログラムエディタ (フルグラフィック)]を開きます。
・ メニュー<編集><編集可能>をクリックして、[利用できるファンクション]を開
きます。
ファンクションリスト
カスタムシンボルリスト
シンボルビュー
ファンクションライブラリ
カスタムシンボルエディタを開く
・ ワークシートの空き領域をクリックしてドローイングカーソルを置きます。
・ [カスタムシンボルリスト]で希望するシンボルをクリックすると,[シンボルビュ
ー]にイメージが登場します。
・ [カスタムシンボルリスト]で希望するシンボルをダブルクリックすると,ワークシ
ート上に描画されます。
・ ワークシート上に描画されたカスタムシンボルはその他の命令シンボル同様、移動、
結線等の編集作業が可能です。
・ 特に可変入力点を持つカスタムシンボル(AND_BOOL,OR_BOOL)は、ファン
クションブロック同様、入力点数を増減することが可能です。

5.18 カスタムシンボルを作成する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 405
5.18 カスタムシンボルを作成する
ここでは,ユーザ独自のカスタムシンボルの作成方法を説明します。
カスタムシンボルはエンジニアリングツール3 バージョン V3。1。0 以降で利用,
作成可能です。
■ 作成可能なカスタムシンボルの概要
・ カスタムシンボルは、<カスタムシンボル名>を必要とします。
・ カスタムシンボルにはコントローラで実行対象となる<機能シンボル>と、実行を
伴わない<非機能シンボル>があります。
・ カスタムシンボルを<機能シンボル>とするとき,実行ベースとなる 1 つのファンク
ションまたはファクションブロックが必要です。
・ ひとつのファンクションまたはファンクションブロックに対して、複数のカスタム
シンボルを定義することができます。
・ カスタムシンボルは、<カスタムシンボルエディタ>を使ってユーザが作成します。
・ <カスタムシンボルエディタ>には、フレーム、ボディ、端子、図形、線描画、コ
メント等の部品が用意されています。
・ 作成した<カスタムシンボルの定義ファイル>はインポート・エクスポート可能で
別の V-Tool3 のユーザシステムに移動させることが可能です。

第 5 章 制御プログラムの作成
6E8C4890 406
■ カスタムシンボルエディタを開く/終了する。
・ [プログラムエディタ (フルグラフィック)]を開きます。
・ メニュー<編集><編集可能>をクリックして、[利用できるファンクション]を開
きます。
・ ボタン[カスタムシンボルエディタ]をクリックして、[カスタムシンボルエディ
タ]を開きます。

5.18 カスタムシンボルを作成する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 407
シンボルエディタ シンボルビュー
カスタムシンボルツリー
・ [カスタムシンボルエディタ]のタイトルバーの右の×ボタンをクリックすると終
了します。
■ カスタムシンボルを新規に作成する
・ [カスタムシンボルツリー]で<ワークライブラリ>を右クリックし、メニュー<追
加>をクリックします。
・ [カスタムシンボルツリー]に新たに追加されたカスタムシンボルをクリックし、カ
スタムシンボル名を変更します。
○補足
・ カスタムシンボル名の規則は次のとおりです。
・ ユーザシステム内で他のカスタムシンボル名と区別できること。
(大文字、小文字の違いは同一と見なします。 前後のスペースは自動的に削除します。)
・ 1 バイト以上 32 バイト以下あること。
(半角文字は 1 バイト、全角文字は 2 バイトで数えます。)
・ 次の特殊文字を含まないこと。 * , 。 / : ; < > ? \ | '

第 5 章 制御プログラムの作成
6E8C4890 408
フレーム
シンボル名
ボディ
シンボルエディタ
・必要ならば<コメント>に簡単な説明文を入力します。
●注記
・ コメントは 128 バイト以下であること
・ オブションボタン<機能>または<非機能>をクリックします。
<機能>を選択した場合、機能シンボルを作成するわけですから実行ベースとなる<
ファンクション名>を入力するか、ボタン[。。。]をクリックして、定義済みのファ
ンクションまたはファンクションブロックを選択します。
<非機能>を選択した場合、非機能シンボルを作成するので、<ファンクション名>
は不要です。
・ [シンボルエディタ]内には、<フレーム>、<シンボル名>、<ボディ>の3つの
部品が置かれています。
<フレーム> :カスタムシンボルの境界線で、プログラムエディタに配置した
ときの選択フレームになります。
●注記
・ 後述する部品はリンクコメントを除き、すべて<フレーム>の内部に配置しなければなりませ
ん。
<シンボル名> :カスタムシンボル名を表示する部品です。
<ボデイ> :カスタムシンボルの中心となる部品です。オンラインモニタ時
はこの境界線をパワー表示します。

5.18 カスタムシンボルを作成する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 409
■ 部品を追加する
・ 追加できる部品はツールバーのアイコンに配置されています。 次のものがありま
す。
部品 役割
図形 様々な図形枠の部品。 内部にテキストやピクチャを配置できる。
線 直線、折れ線、曲線の部品。
入力端子(左,枠有り) 入力引数名を表示する枠付きの入力端子。 接続コネクタは左。
入力端子(左) 入力引数名を表示する枠なしの入力端子。 接続コネクタは左。
入力端子(上) 入力引数名を表示する枠なしの入力端子。 接続コネクタは上。
出力端子(右、枠有り) 出力引数名を表示する枠付きの出力端子。 接続コネクタは右。
出力端子(右) 出力引数名を表示する枠なしの出力端子。 接続コネクタは右。
出力端子(下) 出力引数名を表示する枠なしの出力端子。 接続コネクタは下。
入出力端子 入出力引数名を表示する枠付きの入出力端子。 接続コネクタは左右。
入力端子(右,枠有り) 入力引数名を表示する枠付きの入力端子。 接続コネクタは右。
入力端子(右) 入力引数名を表示する枠なしの入力端子。 接続コネクタは右。
入力端子(下) 入力引数名を表示する枠なしの入力端子。 接続コネクタは下。
入力変数 入力引数に与えられる入力変数。 入力変数1個につき、1ステップを消費します。
出力変数 出力引数に与えられる出力変数。 出力変数1個につき、1ステップを消費します。
ファンクションブロック変数
ファンクションブロックインスタンスとしての変数。
リンクコメント 接続先のTAGNo に関係した値(計器コメントやレンジ等)のコメント表示。
・ これらのアイコンをクリックすると、シンボルエディタ上に部品が登場します。
■ 部品を移動する
・ 部品を選択し、マウスでドラッグすることで希望する位置に移動してください。
・ 端子のコネクタ(赤い四角)は、<フレーム>の境界線上に配置してください。コ
ネクタはグリッド上に自動配置されます。
・ リンクコメント以外の部品は<フレーム>内に配置してください。
■ 部品を切り取る
・ 部品を選択し、[切り取り]アイコンをクリックするか、右ボタンをクリックし、メ
ニュー<切り取り>をクリックすると、選択された部品をクリップボードへ切り取
ることがきます。
■ 部品をコピーする
・ 部品を選択し、[コピー]アイコンをクリックするか、右ボタンをクリックし、メニュ
ー<コピー>をクリックすると、選択された部品をクリップボードへコピーできます。
■部品を貼り付ける
・ シンボルエディタで貼り付ける位置をクリックし、[貼り付け]アイコンをクリック
するか、右ボタンをクリックし、メニュー<貼り付け>をクリックすると、クリッ
プボードの部品を貼り付けることができます。
第 5 章 制御プログラムの作成
6E8C4890 410
■ 部品を削除する
・ [削除]アイコンをクリックするか、[DEL] キーを押下すれば、選択された部品を
削除できます。
・ 部品を選択するには、ひとつの部品をクリックするか、部品のないスペースを基点
にドラッグして範囲選択すれば、その内部の部品をすべて選択することができます。
・ <フレーム>、<シンボル名>、<ボディ>は必須の部品のため削除できません。
■ 部品の大きさを変更する
・ 部品の境界線上にマウスポインタを置き、マウスでドラッグすれば、大きさを変更
できます。
・ <入力端子(左,枠有)>と<出力端子(右、枠有)>のリード線の長さや高さは変
更できません。
■ 部品間をリンクする
・ ひとつの部品(図形、リンクコメント)の中心付近にマウスポインタを置いて、別
の部品の中心付近までマウスをドラッグすれば、部品間にリンク線を作成できます。
不要ならリンク線を選択して[削除]アイコンか[DEL]キーで削除できます。
■ 部品のプロパティを変更する
・ 部品を選択し,右ボタンをクリックし、メニュー<プロパティ>をクリックし、フォ
ーム[プロパティ]を表示します。
・ 必要に応じて、プロパティの値を変更します。
1) 図形のプロパティ
・ 図形内にはテキストを表示することができます。 文字数は 大 1024 バイト(半角
1 バイト,全角 2 バイト換算)。
・ 改行したい場合は[Enter]キーで改行してください。
・ 図形内にはピクチャを表示することができます。 BMP,EMF,WMF,GIF,JPEG 形
式が可能です。
・ 線図が含まれる場合は EMF、WMF のベクトル描画方式を選択すると、拡大・縮小
時の線図の劣化を抑えることができます。
・ <ピクチャ>を選択して[DEL]キーを押下すると、貼り付けたピクチャを削除でき
ます。
・ ピクチャ全体を図形内に表示するには<オートサイズ>の値を‘ピクチャのサイズ
を図形に合わせる’と設定します。
・ 図形を回転する場合は<図形の角度>で角度を指定してください。ただし、下記の
図形は<図形の角度>の設定は無効です。
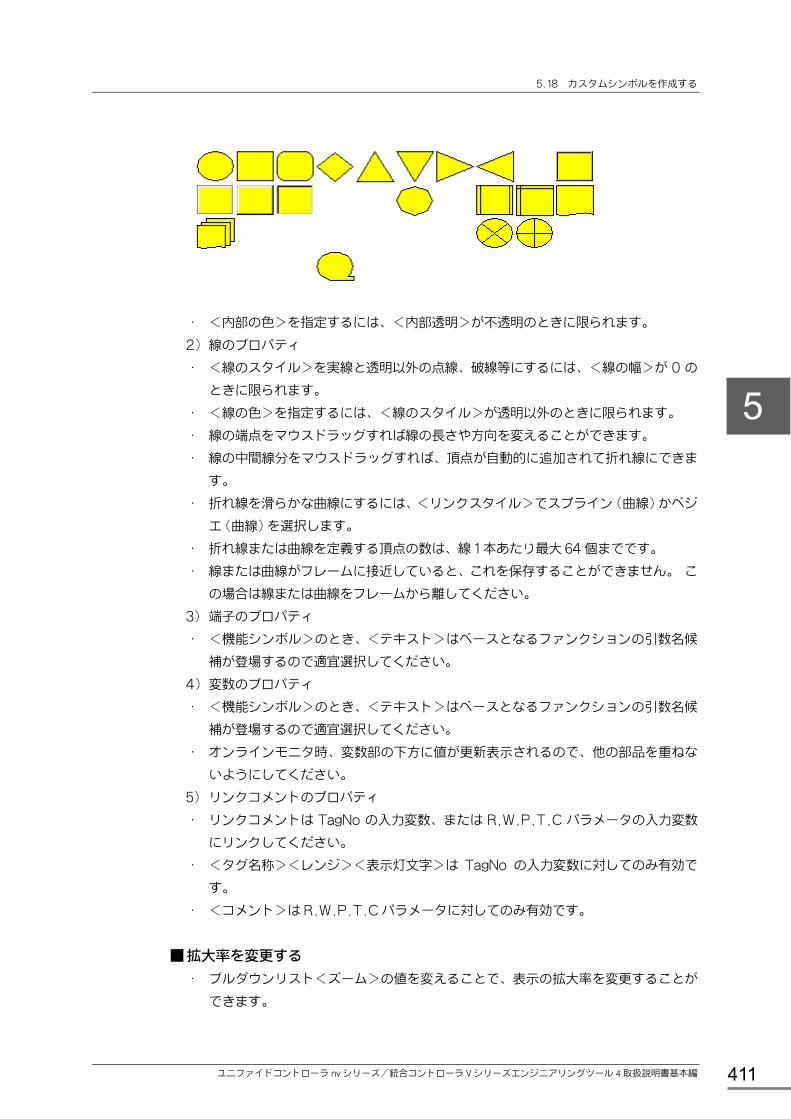
5.18 カスタムシンボルを作成する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 411
・ <内部の色>を指定するには、<内部透明>が不透明のときに限られます。
2) 線のプロパティ
・ <線のスタイル>を実線と透明以外の点線、破線等にするには、<線の幅>が 0 の
ときに限られます。
・ <線の色>を指定するには、<線のスタイル>が透明以外のときに限られます。
・ 線の端点をマウスドラッグすれば線の長さや方向を変えることができます。
・ 線の中間線分をマウスドラッグすれば、頂点が自動的に追加されて折れ線にできま
す。
・ 折れ線を滑らかな曲線にするには、<リンクスタイル>でスプライン(曲線)かベジ
エ(曲線)を選択します。
・ 折れ線または曲線を定義する頂点の数は、線 1 本あたり 大 64 個までです。
・ 線または曲線がフレームに接近していると、これを保存することができません。 こ
の場合は線または曲線をフレームから離してください。
3) 端子のプロパティ
・ <機能シンボル>のとき、<テキスト>はベースとなるファンクションの引数名候
補が登場するので適宜選択してください。
4) 変数のプロパティ
・ <機能シンボル>のとき、<テキスト>はベースとなるファンクションの引数名候
補が登場するので適宜選択してください。
・ オンラインモニタ時、変数部の下方に値が更新表示されるので、他の部品を重ねな
いようにしてください。
5) リンクコメントのプロパティ
・ リンクコメントは TagNo の入力変数、または R,W,P,T,C パラメータの入力変数
にリンクしてください。
・ <タグ名称><レンジ><表示灯文字>は TagNo の入力変数に対してのみ有効で
す。
・ <コメント>は R,W,P,T,C パラメータに対してのみ有効です。
■ 拡大率を変更する
・ プルダウンリスト<ズーム>の値を変えることで、表示の拡大率を変更することが
できます。

第 5 章 制御プログラムの作成
6E8C4890 412
■ カスタムシンボルを保存する。
・ ボタン[保存]をクリックすると、編集されたカスタムシンボルの検査を開始しま
す。
・ 検査で問題が発見された場合はエラーリストを表示します。
エラーリストの1行をダブルクリックすると、該当部品を選択します。
* エラーリストのアイコン
アイコン 意味
エラー。部品の配置位置やプロパティの設定にエラーがあります。 保存は行われません。
注意。指定された内容についてもう一度確認してください。 エラーリストに「エラー」が無く、「注意」だけの場合は、保存が行われます。
・ ボタン[一時保存]をクリックすると、カスタムシンボルの検査をしないで保存し
ます。一時保存されたカスタムシンボルは「利用できるファンクション」で選択で
きません。
・ [カスタムシンボルツリー]上で、カスタムシンボルのアイコンは次の4つの状態を
表しています。
フルグラフィックエディタで利用可能 フルグラフィックエディタで利用不可
機能シンボル
非機能シンボル
■ 既存のカスタムシンボルを流用する。
既存のカスタムシンボルエディタの内容を流用するのは次の2つの方法があります。
・同一システム内で流用する。
・他の PC のカスタムシンボルを流用する。
1) 同じユーザシステム内で流用する。
・[カスタムシンボルツリー]で、流用したいカスタムシンボルを右ボタンクリックし、
メニュー<コピー>をクリックします。
・コピー先の<ライブラリ>フォルダを右ボタンクリックし、メニュー<貼り付け>を
クリックします。
・コピーされたカスタムシンボルを右ボタンクリックし、メニュー<名前の変更>でカ
スタムシンボル名を変更します。
・コピーされたカスタムシンボルをダブルクリックして、[シンボルエディタ]を開き、
編集、保存します。

5.18 カスタムシンボルを作成する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 413
2) 異なるユーザシステムから流用する。
・ 流用したいカスタムシンボルが存在するユーザシステムを開きます。
・ [カスタムシンボルエディタ]を開きます。
・ [カスタムシンボルツリー]で、コピー元の<ライブラリ>フォルダを右クリックし、
メニュー<エクスポート>をクリックします。
・ [エクスポート]フォームで、エクスポートしたいカスタムシンボルをチェックしま
す。
・ [エクスポート]フォームで、[エクスポート]ボタンをクリックすると、<カスタ
ムシンボル名>を冠したファイルを保存します。
・ 流用先のユーザシステムを開きます。
・ [カスタムシンボルエディタ]を開きます。
・ [カスタムシンボルツリー]で、コピー先の<ライブラリ>フォルダを右クリック
し、メニュー<インポート>をクリックします。
・ [インポート]フォームで、先ほどのファイルを選択します。
・ [インポート]フォームで、[インポート]ボタンをクリックすると、先ほどのカス
タムシンボルがインポートされます。
後は、「(1)同じユーザシステム内で流用する」と同様に、コピーされたカスタムシンボ
ルを開き、編集、保存します。
■ カスタムシンボルライブラリを編集する。
1) カスタムシンボルの追加と名前の変更
「■カスタムシンボルを新規に作成する」を参照してください。
2) カスタムシンボルの削除
・ [カスタムシンボルツリー]で、削除したいカスタムシンボルを右クリックし、メニ
ュー<削除>をクリックします。
3) カスタムシンボルライブラリフォルダの追加と名前の変更
・ [カスタムシンボルツリー]で、<システム>を右クリックし、メニュー<追加>を
クリックします。
・ [カスタムシンボルツリー]で、追加された<ライブラリ>を右クリックし、メニュ
ー<名前の変更>をクリックし、名前を変更します。
4) カスタムシンボルライブラリフォルダの削除
・ [カスタムシンボルツリー]で、削除したい<ライブラリ>を右クリックし、メニュ
ー<削除>をクリックします。
●注記
・ カスタムシンボルライブラリフォルダを削除すると配下のカスタムシンボルをすべて削除しま
す。
・ <ワークライブラリ>と<計装シンボルライブラリ>は標準で用意しており削除、名前の変更
はできません。

第 5 章 制御プログラムの作成
6E8C4890 414
5.19 プログラムで利用されていない変数を検索する
登録されている変数の中で、コンパイル済みのプログラムから参照されていない変数
を検索します。
検索の対象はネットワーク変数です。
■ 制約事項
検索処理中に変数が変更された場合、検索結果の整合性は保証できません。
ネットワーク変数で登録されている変数と同じ名前の変数が、他のスコープ(ローカル
変数、コントローラ変数、I/O変数、ステーション変数)で登録されている場合は、
ネットワーク変数が利用されていないことを判断できません。
■ 未使用の変数を検索する
1) [プロダクトツリー]で、ネットワーク変数が登録されているネットワークを選択
後、メニュー<ファイル><未使用の変数の検索>を選択、またはマウス右ボタン
にて表示されたポップアップメニュー上で<未使用の変数の検索>を選択すると、
[未使用の変数の検索]画面が表示されます。
2) [開始]ボタンを押すと、検索を実行します。

5.19 プログラムで利用されていない変数を検索する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 415
・表示項目
ネットワーク変数 {変数名} - {データ型}
・ {ネットワーク No:ネットワーク機種名} : 「未使用の変数」の先頭に緑色で表
示します。
・ {ネットワーク No:ネットワーク機種名} - {送信ブロック No} : 「未使用の変
数」の送信ブロック毎の先頭に緑色で表示します。
・ [中止]ボタン: 実行中であっても検索を中止することができます。
■ 未使用の変数のチェック結果を印字する
[印刷]ボタンをクリックします。

第 5 章 制御プログラムの作成
6E8C4890 416

417 417
第 6 章 制御パラメータの設定
6.1 データビューで値を設定する······················································419
6.2 Tag エディタで値を設定する ·····················································422

第 6 章 制御パラメータの設定
6E8C4890 418
■制御パラメータとは
「制御パラメータ」とは、制御プログラムで参照する運転目標値や警報判定値などの半
固定値を指します。これらの値は、あらかじめツールで設定、保持し、コントローラへ
ダウンロードし、調整や運転状況に応じてコントローラ内の値を、HMIやツールから
変更するのが一般的な使い方です。このため、制御パラメータは、コントローラとして
電源ON/OFFで値を保持できるメモリを使う必要があります。
○補足
・ 「電源ON/OFFで値を保持できるメモリ」は、コントローラ機種によって異なります。詳
しくは、各コントローラの取り扱い説明書を参照してください。
・ 「パラメータ」が半固定値を意味し、主に制御プログラムで値を読むことが主体であるのに対
して、制御プログラムが積極的に値を更新するものを「データ」と呼ぶことがあります。
■データビューと Tag エディタ
・ 制御パラメータやデータの値を表示・設定するために、[データビュー]と[Tag エ
デイタ]があります。
・ どちらも、ツールのファイルの値(オフライン)を、表示・設定することができま
す。
・ どちらも、コントローラのメモリの値(オンライン)を、リフレッシュ表示・設定
することができます。
・ [データビュー]は、すべてのグローバル変数やローカル変数を IEC61131-3 のデー
タ型で、表示、設定します。
・ [データビュー]は、任意の 32 点までの変数の値を表示、設定できます。
・ [データビュー]は、表示した変数名をデータシートに保存して、必要なときに呼び
出すことができます。
・ [Tag エディタ]は、L コントローラであらかじめ用意された Tag パラメータ/デ
ータを表示、設定します。
・ [Tag エディタ]で見る Tag パラメータ/データは、その変数のコンパイルの有無
に依らず表示、設定できます。
・ [Tag エディタ]は、Tag パラメータ/データの有効範囲内での値の設定、選択、複
写が簡単にできます。
・ [Tag エディタ]は、オンラインとオフラインの値を同時に表示することもできます。
・ [データビュー]は、L,S コントローラで利用できますが、Tag の一部のパラメータ
は IEC61131-3 のデータ型以外のものがあるため、判りやすく表示できないものが
あります。[Tag エディタ]は、L コントローラの Tag パラメータ/データに特化
した機能です。両者は用途、状況に応じて使ってください。
ここでは、制御パラメータを設定するときの操作を説明します。以下では、次の内容を
説明します。
6.1 データビューで値を設定する
6.2 Tag エディタで値を設定する
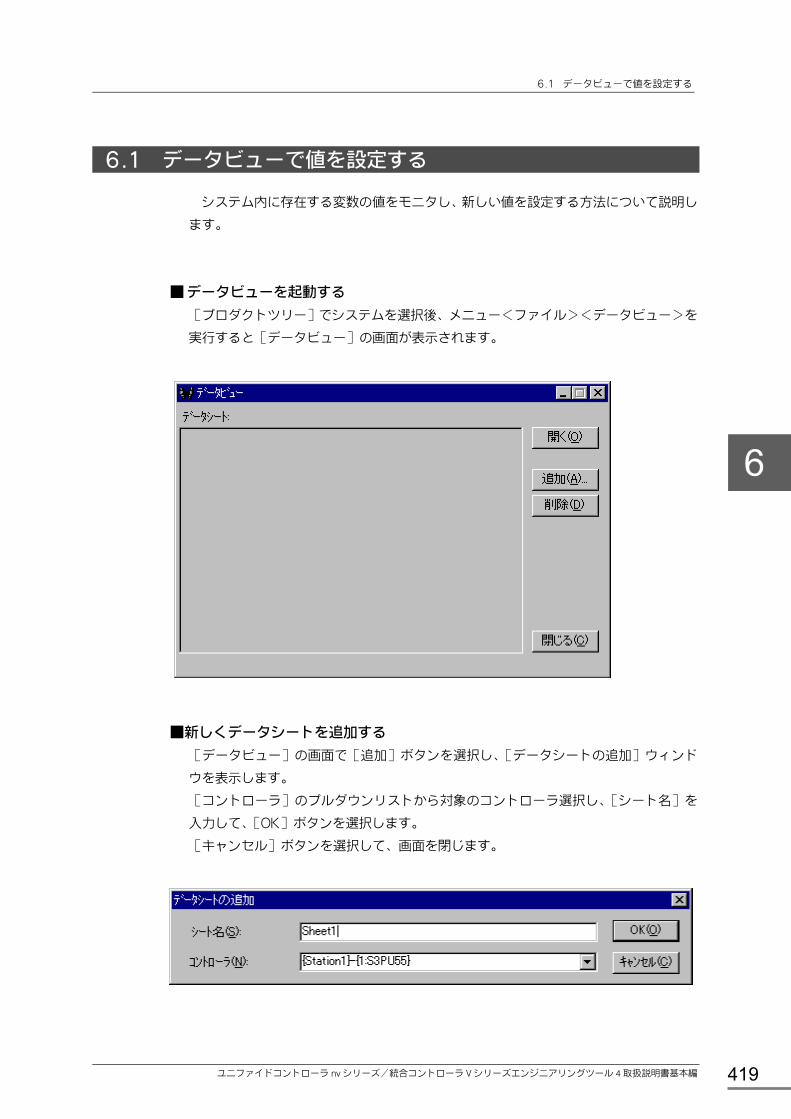
6.1 データビューで値を設定する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 419
6.1 データビューで値を設定する
システム内に存在する変数の値をモニタし、新しい値を設定する方法について説明し
ます。
■ データビューを起動する
[プロダクトツリー]でシステムを選択後、メニュー<ファイル><データビュー>を
実行すると[データビュー]の画面が表示されます。
■新しくデータシートを追加する
[データビュー]の画面で[追加]ボタンを選択し、[データシートの追加]ウィンド
ウを表示します。
[コントローラ]のプルダウンリストから対象のコントローラ選択し、[シート名]を
入力して、[OK]ボタンを選択します。
[キャンセル]ボタンを選択して、画面を閉じます。

第 6 章 制御パラメータの設定
6E8C4890 420
■データシートに変数を追加する
[データビュー]の画面でデータシートを選択し、[開く]ボタンを選択します。
データシートが開くので、値を表示したい変数を入力します。
データシートへの変数の追加は、各変数の画面からのドラッグ・ドロップでも可能です。
データビューがオンラインモニタ時でも変数の追加/削除は可能です。
■モニタを開始する
データシートの画面の[値]フレームで[コントローラ]を選択すると、オンラインの
値がモニタできます。
値の表示形式は、[オプション]の画面で切り替えることができます。

6.1 データビューで値を設定する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 421
■変数の値を変更する
値の列で新しい値を入力します。[書込み]ボタンを押すことで、コントローラに反映
されます。

第 6 章 制御パラメータの設定
6E8C4890 422
6.2 Tag エディタで値を設定する
ここでは、Tag エディタを使って、オフライン、またはオンラインで値を設定する方
法を説明します。 Tag エディタで表示する変数は L コントローラの Tag パラメータに
限られます。
■起動する
1)[Tag エディタ]は L3、L2、L1、FN タイプのコントローラ登録を必要とします。
まだこのコントローラの登録がなければ、[プロダクトツリー]で登録しておいてく
ださい。
2) [プロダクトツリー]で、対象のコントローラを選択し、メニュー<ファイル><開く>
<タグエディタ>を選択すると、[タグエディタ]が起動します。
パラメータ種別で、希望する種別を選択すると、下図のように Tag パラメータの内
容が表示されます。
3)各 Tag パラメータは複数のレコードがあります。<レコード No>の欄で希望す
るレコード No.を指定したり、前後に移動して、表示することができます。
4)アイテム[表示]で、データソースを切り替えることができます。
[表示] 意味
ツール ツールのダウンロードファイル内に格納された値を表示します。
コントローラ コントローラと伝送できる状態にあるとき、コントローラ内のメモリに格納された値をリフレッシュ表示します。
ツールとコントローラ ダウンロードファイルとコントローラの値を並べて表示します。

6.2 Tag エディタで値を設定する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 423
■Tag パラメータを設定する
・ <ツールの値>または<コントローラの値>の欄で,[Enter]すると、テキスト入
力または選択入力ができます。
・ 数値をキー入力するものは、 下段の欄に有効範囲が示されます。
・ 入力を確定するには、[Enter]、[↓]、または[↑]キーを押します。
・ 入力をキャンセルするには、[ESC]キーを押します。
・ <ツールの値>または<コントローラの値>で赤字のところは、まだファイルに格
納されていない値=変更値示しています。
・ 値を保存するには、メニュー<ファイル><保存>を実行します。
・ 変更値が有効ならば、変更値は保存されて、赤字から黒字になります。
・ 変更値が有効でないとき、下図のように、そのすべての項目名とエラーの内容を示
します。
このとき、変更値は保存せず、赤字のままにします。適宜修正してください。
■Tag パラメータを複写する
表示項目の<ツールの値>を他のレコードに一度に複写することができます。
1) コピー元のレコードを表示し、メニュー<編集><パラメータのコピー>をクリッ
クします。

第 6 章 制御パラメータの設定
6E8C4890 424
2) [開始レコード No.],[終了レコード]に、コピー先のレコード No を設定します。
3) オプションとして、コピーする内容が、現在表示されている<ツールの内容>か、
暗黙の<初期値>か、適宜選択します。
4) オプションとして、コピーする項目の範囲が、現在表示されている<全項目>か<
選択項目>か、適宜選択します。<選択項目>は、このダイアログを開く前に、現
在表示されているコピー元の項目で、「ツールの値」の欄をドラッグし、連続する項
目を選択して置いた範囲です。
5) ボタン[OK]をクリックすると、しばらくして、指定したコピーが完了します。
■Tag パラメータを印刷する
アイテム<ツールの値>は、以下の手順で印刷することができます。
1)メニュー<ファイル><印刷>を実行します。
2)上図ダイアログで、印刷範囲を指定して印刷します。

425
第 7 章 ダウンロード/アップロード
7.1 コントローラと接続する ·····························································427
7.2 コントローラへ一括ダウンロードする ·······································436
7.2.1 nv シリーズのコントローラへ一括ダウンロードする··436
7.2.2 V シリーズのコントローラへ一括ダウンロードする ···446
7.3 タスクを個別にダウンロードする ··············································460
7.4 コントローラから一括アップロードする ···································462

第 7 章 ダウンロード/アップロード
6E8C4890 426
・ダウンロードとは、エンジニアリングツールで作成した、「コンフィグレーション」
「プログラム」、「グローバル変数」の内容を、コントローラへ転送することを指しま
す。
・これらの成果は、下表のエンジニアリング行為で作成します。
エンジニアリング 成果物
ハードウェアの登録 コンフィグレーション
制御プログラムの作成 プログラム
制御パラメータの設定 グローバル変数
・アップロードとは、コントローラから、「コンフィグレーション」、「プログラム」、「グ
ローバル変数」の内容を、エンジニアリングツールへ転送することを指します。
ここでは、次を説明します。
・7.1 コントローラと接続する
・7.2 コントローラへ一括ダウンロードする
・7.3 タスクを個別にダウンロードする
・7.4 コントローラから一括アップロードする
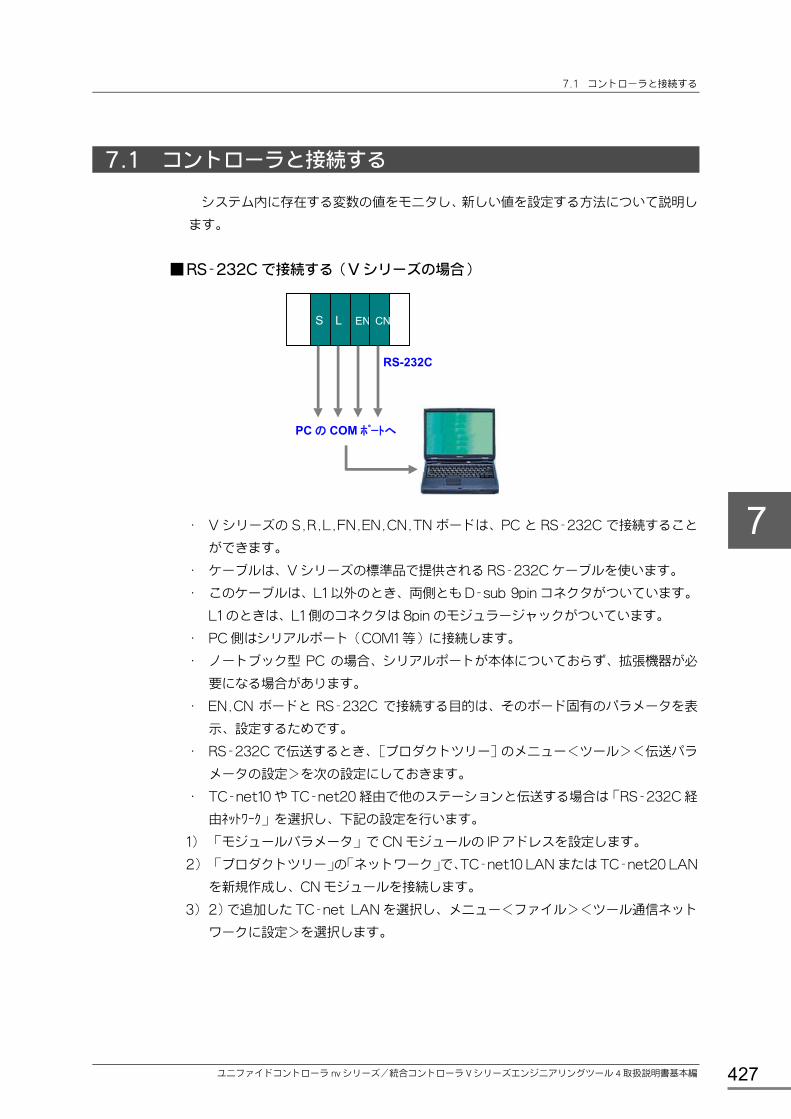
7.1 コントローラと接続する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 427
7.1 コントローラと接続する
システム内に存在する変数の値をモニタし、新しい値を設定する方法について説明し
ます。
■ RS-232C で接続する(V シリーズの場合)
S L EN CN
RS-232C
PC の COM ポートへ
・ V シリーズの S,R,L,FN,EN,CN,TN ボードは、PC と RS-232C で接続すること
ができます。
・ ケーブルは、V シリーズの標準品で提供される RS-232C ケーブルを使います。
・ このケーブルは、L1 以外のとき、両側とも D-sub 9pin コネクタがついています。
L1 のときは、L1 側のコネクタは 8pin のモジュラージャックがついています。
・ PC 側はシリアルポート(COM1 等)に接続します。
・ ノートブック型 PC の場合、シリアルポートが本体についておらず、拡張機器が必
要になる場合があります。
・ EN,CN ボードと RS-232C で接続する目的は、そのボード固有のパラメータを表
示、設定するためです。
・ RS-232C で伝送するとき、[プロダクトツリー]のメニュー<ツール><伝送パラ
メータの設定>を次の設定にしておきます。
・ TC-net10 や TC-net20 経由で他のステーションと伝送する場合は「RS-232C 経
由ネットワーク」を選択し、下記の設定を行います。
1) 「モジュールパラメータ」で CN モジュールの IP アドレスを設定します。
2) 「プロダクトツリー」の「ネットワーク」で、TC-net10 LAN または TC-net20 LAN
を新規作成し、CN モジュールを接続します。
3) 2)で追加した TC-net LAN を選択し、メニュー<ファイル><ツール通信ネット
ワークに設定>を選択します。
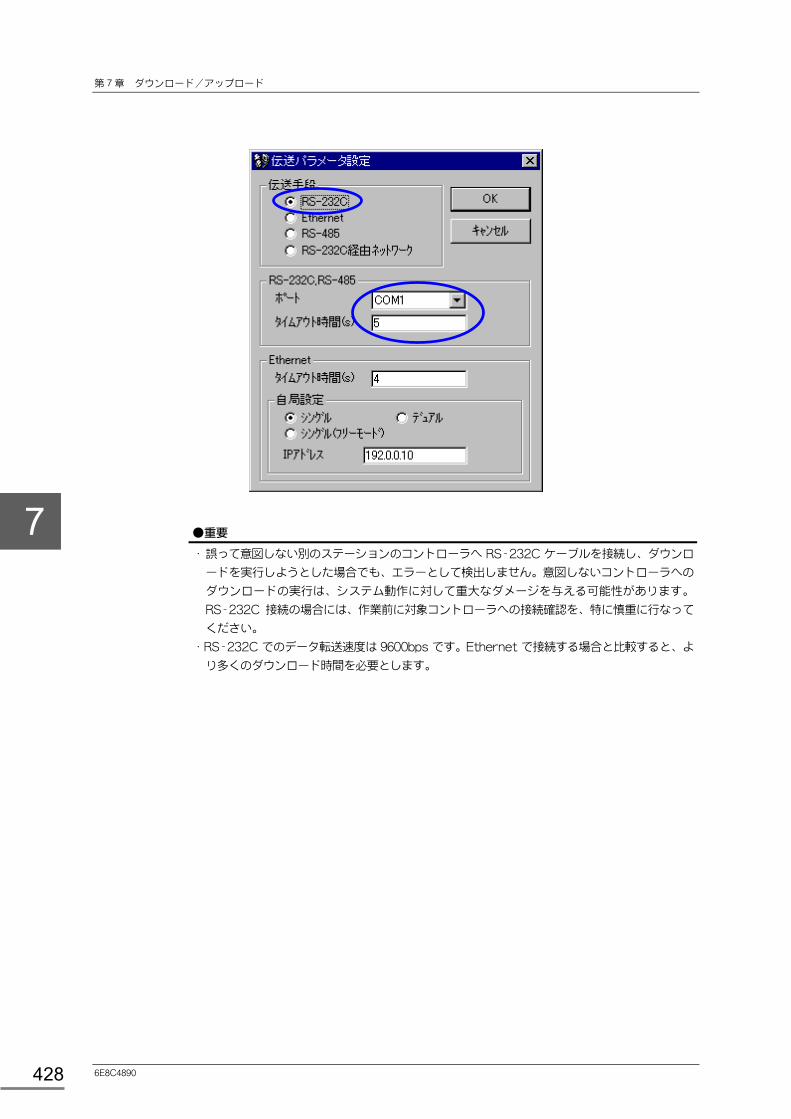
第 7 章 ダウンロード/アップロード
6E8C4890 428
●重要
・ 誤って意図しない別のステーションのコントローラへ RS-232C ケーブルを接続し、ダウンロ
ードを実行しようとした場合でも、エラーとして検出しません。意図しないコントローラへの
ダウンロードの実行は、システム動作に対して重大なダメージを与える可能性があります。
RS-232C 接続の場合には、作業前に対象コントローラへの接続確認を、特に慎重に行なって
ください。
・RS-232C でのデータ転送速度は 9600bps です。Ethernet で接続する場合と比較すると、よ
り多くのダウンロード時間を必要とします。

7.1 コントローラと接続する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 429
■RS485 で接続する(V シリーズの場合)
S S S
RS485/232C 変換器
RS485
ステーション 1 ステーション 4 ステーション 2
・ 1台のツールで、31 台以下のコントローラに接続することができます。
・ ケーブルは、V シリーズの標準品で提供される RS485 ケーブルを使います。
・ RS485 で接続できるのは、S コントローラだけです。
・ RS485 接続するには、RS232C と RS485 のインタフェース変換器が必要です。
・ RS485 で伝送するとき、[プロダクトツリー]のメニュー<ツール><伝送パラメ
ータの設定>を次の設定にしておきます。この設定は、それぞれコントローラ伝送
を必要とする各々の画面にあり、どこで設定してもその PC で共通です。

第 7 章 ダウンロード/アップロード
6E8C4890 430
・ さらに、RS485 で伝送するときは、ツールが相手のコントローラを特定して通信す
る必要があることから、相手のコントローラに、RS485 通信上のステーション No
なる IDNo を指定しておく必要があります。ステーション No は、「プロダクトツリ
ー」で、S コントローラを指定し、メニュー<ファイル><モジュールパラメータ
>を実行し、下図のパラメータを指定しておく必要があります。
・ 「RS485 ステーション No」は、1台のツールに接続する S コントローラ同士で1から 32 まで
の番号を割り当てます。
・ 「伝送速度」「パリティ設定」「データ長」「ストップビット」は、シリアル通信のパ
ラメータですが、これらは、ツールと伝送する限り、下図のとおりとしてください。
・ なお、これらのパラメータを S コントローラに書き込む必要があるため、RC232C
または Ethernet でダウンロードした後でないと、RS485 の伝送は有効にならない
ことに注意してください。

7.1 コントローラと接続する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 431
■ Ethernet で接続する(nv シリーズ、および V シリーズの場合)
[OIS1200 システム]
S L EN CN
Ethernet
S L EN
Tool
192.0.0.62
192.0.0.10
192.0.0.1
192.0.0.11
OIS1200 OIS1200
192.0.0.2
S L EN
192.0.0.12
・ ツールも含めた IP アドレスは、‘192.0.0.X’ X=1~62 で設定します。
・ サブネットマスクは、‘255.255.255.192’とします。
・ EN の IP アドレスは、ツールで次のように設定します。
1) 「プロダクトツリー」で EN モジュールを接続します。
2) 「プロダクトツリー」のメニュー<ファイル><モジュールパラメータ>で、EN モ
ジュールのパラメータを次のように設定します。
EN ボードをシングルで使うときは、プライマリの設定で OK です。

第 7 章 ダウンロード/アップロード
6E8C4890 432
3) 「プロダクトツリー」の「ネットワーク」で、Ethernet LAN を新規作成し、EN モ
ジュールを接続します。
4) 3)で追加した Ethernet LAN を選択し、メニュー<ファイル><ツール通信ネット
ワークに設定>を選択します。
5) さらに、[プロダクトツリー]のメニュー<ツール><伝送パラメータの設定>を次
の設定にしておきます。
・ <自局設定>は、ツール PC の IP アドレスを設定します。
伝送路がシングルのときは、<シングル>を指定してください。デュアルのときは、
<デュアル>を指定してください。OIS1200 と同一 PC 上でツールを起動する場合
は、<シングル(フリーモード)>を指定しないでください。
・ EN の IP アドレスの X の No は、EN ボードのロータリスイッチで 10 進の X を 16
進に直した上位(H)と下位(L)の番号を設定します。詳しくは EN ボードのハード
ウェア取り扱い説明書を参照してください。
・ PC の IP アドレスは、Windows の標準機能で設定します。
設定方法は、セットアップ編の「3.1.1 Step1 Windows プラットフォームを設定す
る」を参照ください。

7.1 コントローラと接続する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 433
[その他の Ethernet システム]
Ethernet LAN 上に OIS1200 がいない場合は、次の二つの<IP アドレスタイプ>が使えま
す。
EN モジュールのパラメータで、[IP アドレスタイプ]の欄を、いずれかに設定してくださ
い。
●注記
・ クラスを変更した場合は V ツールの再起動が必要になります。
[nv シリーズの場合]
クライアント/サーバ構成の場合、通常は、下図のように、EN811/FN821 へ接続しま
す。
しかし、EN811/FN812 に障害が発生した等により、PU811/PU821 などに直接、接
続して(RS-232C 相当の使い方)確認したいことがあります。
その場合、以下の方法により、簡単に切り替えることができます。
TC-net
サーバ PC
Ethernet
クライアント PC
クライアント PC
PU811
EN811
TN821
前提条件:
・ nv コントローラへ接続するクライアント PC は、ネットワークインタフェースカー
ド(NIC)が 2 枚必要です。
・ 1 つ目はサーバクライアント用と EN811/FN812 接続用、もう 1 つは nv コントロ
ーラ直結用です。
1) [伝送パラメータ設定]画面の伝送手段で Ethernet(nv 直結)を選択します。
2) [Ethernet(nv 直結) IP アドレス設定]画面を開きます。
3) 接続先(nv コントローラの)IP アドレスと自 PC IP アドレスを設定し、[OK]ボタ
ンを押します。
4) [伝送パラメータ設定]画面で[OK]ボタンを押します。

第 7 章 ダウンロード/アップロード
6E8C4890 434
接続先 IP アドレスはデフォルトで、172.16.64.1 を表示します。
つまり、PU811/PU821 などの IP 設定をステーションに関係なく一律、172.16.64.1
に設定しておくことで、接続の容易さは更に向上します。
■Class B 型 (V シリーズ標準)
ツールも含めた IP アドレスは、‘172.16.64.X’ X=1~126 で設定します。
サブネットマスクは、‘255.255.192.0’とします。
EN の IP アドレスの X の No.は、EN ボードのロータリスイッチで 10 進の X を 16 進
に直した上位(H)と下位(L)の番号を設定します。詳しくは EN ボードのハードウェア
取扱説明書を参照してください。
■任意
ツールから、任意の IP アドレス(クラス B または、クラス C)を EN に設定できます。
クラス B のとき、サブネットマスクは、‘255.255.192.0’とします。
ツールも含めた IP アドレスは、‘172.16.64.X’~‘172.31.64.X’ (X=1~126)
で設定します。
クラス C のとき、サブネットマスクは、‘255.255.255.192’とします。
ツールも含めた IP アドレスは、‘192.168.0.X’~‘192.168.255.X’ (X=65~126)
で設定します。

7.1 コントローラと接続する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 435
詳しくは EN ボードのハードウェア取扱説明書を参照してください。
EN モジュールがフリーモードおよび、伝送路がシングルのときは、上記以外の任意の
IP アドレスも指定できます。この場合、[伝送パラメータ設定]にて、<シングル(フ
リーモード)>を指定してください。
[Tc-net10 システム]
S L EN CN
Ethernet
S L EN
S L EN CN S L EN CN S L EN CN
Tc-net
Tool
172.16.64.1
172.16.64.2 172.16.64.4
172.16.64.3
172.16.64.5 172.16.64.6 172.16.64.7
Tc-net10 上のコントローラは、Ethernet 上のツール PC から、透過的にアクセスす
ることができます。
このためには、ツールを含めた IP アドレスを‘172.16.64.X ’ X=1~64 に設定しま
す。
サブネットマスクは、’ 255.255.192.0 ’ に設定します。
EN,CN の IP アドレスは、「プロダクトツリー」の EN、CN モジュールのパラメータで
設定します。
EN の IP アドレスの X の No は、 EN ボードのロータリスイッチで 10 進の X を 16 進
に直した上位(H)と下位(L)の番号を設定します。詳しくは EN ボードのハードウェア
取り扱い説明書を参照してください。
CN の IP アドレスの X の No は、 CN ボードのロータリスイッチで 10 進の X の上位
(H)と下位(L)の番号を設定します。詳しくは CN ボードのハードウェア取り扱い説明
書を参照してください。
PC の IP アドレスは、Windows の標準機能で設定します。

第 7 章 ダウンロード/アップロード
6E8C4890 436
7.2 コントローラへ一括ダウンロードする
1 台のコントローラへ「コンフィグレーション」、「プログラム」、「グローバル変数」
を一括でダウンロードする手順について説明します。
7.2.1 nv シリーズのコントローラへ一括ダウンロードする
1 台のコントローラへ「コンフィグレーション」、「プログラム」、「グローバル変数」
を一括でダウンロードする手順について説明します。
■ダウンロードの種類と手順概要
・ 一括ダウンロード/分割ダウンロード (ツールソース無し)
1 台のコントローラへ「コンフィグレーション」、「プログラム」、「グローバル変数」
を一括、または分割してダウンロードする機能です。アップロード時にアプリケー
ションを復元(逆生成)しない場合、またはツールソースのみを後からダウンロー
ドする場合に利用します。
なお、オンライン中にはダウンロードできないため、ダウンロード前にコントロー
ラを HALT(一時休止状態)にする必要があります。
手順は以下のとおりです。各手順の詳細については、各項を参照してください。
1)コントローラを HALT(一時休止状態)にする。
2)コントローラへ一括ダウンロードする。 (ツールソース無し)
3)コントローラを RUN(運転状態)にする。
・ I/O 構成をオンラインでダウンロード
I/O 構成情報をオンラインでダウンロードする機能です。稼働中のコントローラを
HALT(一時停止状態)にすることなく、I/O モジュールの追加やパラメータの
変更を行いたい場合に利用します。
手順は以下のとおりです。各手順の詳細については、各項を参照してください。
1)コントローラへ I/O 構成情報をオンラインでダウンロードする。
・ I/O コネククションをオンラインでダウンロード
I/O 変数、ネットワーク変数、およびステーション変数の一括入出力指定(I/O コ
ネクション)をオンラインでダウンロードする機能です。稼働中のコントローラを
HALT(一時停止状態)にすることなく、後から追加した変数の一括入出力を実
行させたい場合に利用します。
手順は以下のとおりです。各手順の詳細については、各項を参照してください。
1)コントローラへ I/O コネクションをオンラインでダウンロードする。

7.2 コントローラへ一括ダウンロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 437
■コントローラを HALT(一時休止状態)にする。
・ 一括ダウンロードするには、コントローラをHALTにする必要があります。
・ コントローラがプロセス操業または調整段階にあるとき、HALT にすれば、そのコ
ントローラの制御演算はすべて停止します。このとき HALT にしてよいかは、操業
の観点から判断する必要があります。操業監督者、または操業監督者から権限を委
譲されている調整監督者の許可を得て行ってください。
・ コントローラをHALTに切り替えるには、ローカルでコントローラの正面パネル
のSWで行う方法と、リモートでツールから行う方法があります。
・ ローカルで行うには、コントローラ機種により異なります。ハードウェアの取り扱
い説明書を参照してください。
・ リモートで行うには、次の2とおりの操作があります。
1)[システムビュー]の[運転モード設定]にて、運転モードを HALT に切り替える。
2)一括ダウンロードの手順の途中で、運転モードを HALT に切り替える。
■ コントローラへ一括ダウンロードする。 (ツールソース無し)
1) [プロダクトツリー]にて該当ステーションをマウスでクリックし、メニュー<ファ
イル><ダウンロード>を実行します。表示された下記画面にて、「一括ダウンロー
ド/分割ダウンロード」を選択します。
2) ボタン[次へ]をクリックして、表示された下記画面にて、ダウンロード単位を選択
します。
・ 一括ダウンロード: コントローラをメモリクリアして、「コンフィグレーション」、
「プログラム」、「グローバル変数」をすべてダウンロードします。

第 7 章 ダウンロード/アップロード
6E8C4890 438
・ 分割ダウンロード: メモリクリアしないで、「コンフィグレーション」、「プログラ
ム」、「グローバル変数」を指定してダウンロードします。
二重化ステーションでは、さらに以下のオプションも選択します。(シングル構成で
は表示されません。)
・ 二重化ダウンロード: 二重化両系を HALT にした後に、プライマリ側へダウンロ
ードします。
・ 単独ダウンロード: 指定されたプライマリ側、セカンダリ側のいずれかを HALT
にした後に、指定側へダウンロードします。
○補足
・ 「二重化ダウンロード」機能は、コントローラが二重化の実行を開始する時の自動イコライズ
機能を使用することを前提としています。よってダウンロードの完了直後は、二重化両系のデ
ータは一致していません。二重化運転する場合には、必ずプライマリ側、セカンダリ側の順で
コントローラを RUN にしてください。
3) ボタン[次へ]をクリックして、ダウンロード先のコントローラをチェックします。
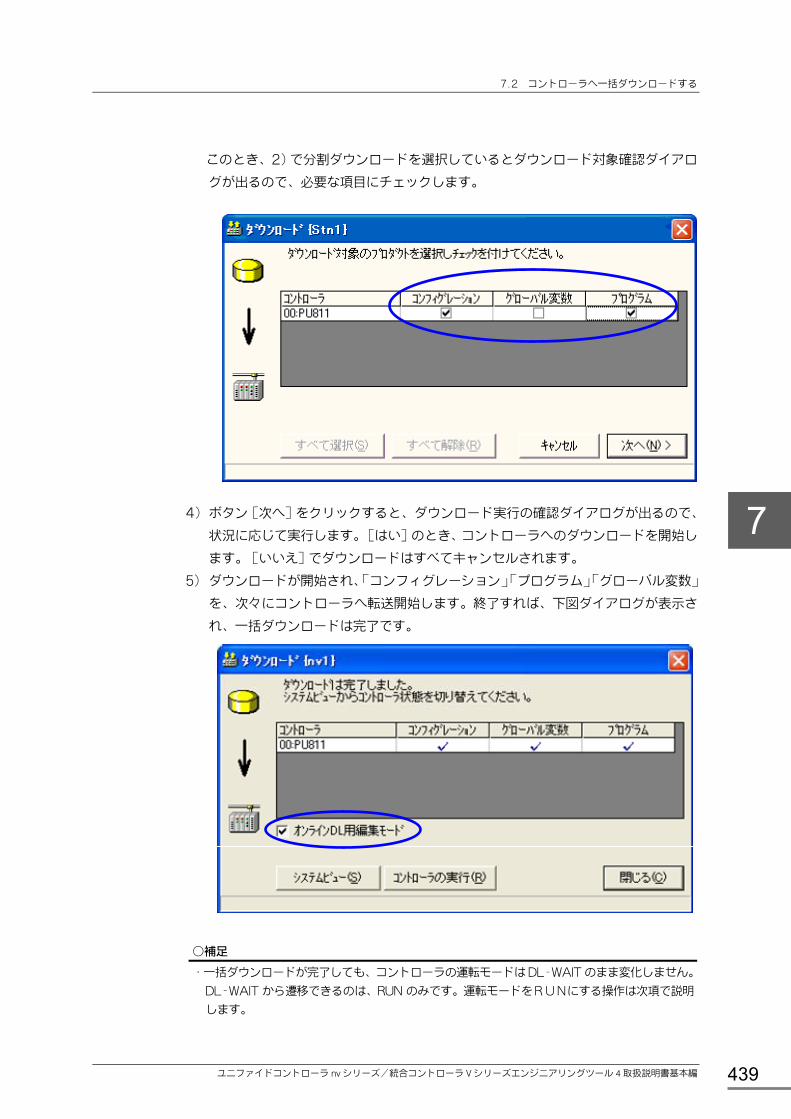
7.2 コントローラへ一括ダウンロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 439
このとき、2)で分割ダウンロードを選択しているとダウンロード対象確認ダイアロ
グが出るので、必要な項目にチェックします。
4) ボタン[次へ]をクリックすると、ダウンロード実行の確認ダイアログが出るので、
状況に応じて実行します。[はい]のとき、コントローラへのダウンロードを開始し
ます。[いいえ]でダウンロードはすべてキャンセルされます。
5) ダウンロードが開始され、「コンフィグレーション」「プログラム」「グローバル変数」
を、次々にコントローラへ転送開始します。終了すれば、下図ダイアログが表示さ
れ、一括ダウンロードは完了です。
○補足
・一括ダウンロードが完了しても、コントローラの運転モードは DL-WAIT のまま変化しません。
DL-WAIT から遷移できるのは、RUN のみです。運転モードをRUNにする操作は次項で説明
します。

第 7 章 ダウンロード/アップロード
6E8C4890 440
6) オンラインDL用編集モードをチェックすると、I/O 構成や I/O 変数の編集操作を
オンライン追加が可能な範囲で制限することができます。対象の操作は以下のとお
りです。
No. 機 能 許可する編集操作
1 コンフィグレーションの登録 ・type1 の場合、I/O モジュールの追加のみ。 ・type2 の場合、I/O ノード、I/O モジュールの追加のみ。
2 I/O 変数、ステーション変数、ネットワーク変数の登録
・新規変数の追加。 ・既存変数の「I/O 速度」の変更。 ・既存変数のコメントの変更。
3 I/O コネクションの領域変更 ・「I/Q レジスタ使用個数」が 0 のとき、先頭 No.と個数の変更。
4 テキストのインポート ・コンフィグレーションおよび、変数のインポートは上記 No.1,2の範囲。
オンライン DL 用編集モードはプロダクトツリーからも変更することができます。
対象ステーションを選択し、<ファイル><オンラインDL用編集モード>にてモ
ードを変更します。
■コントローラを RUN(運転状態)にする。
・ コントローラを RUN にすると、コントローラはその制御演算をすべて実行するよう
になります。
・ コントローラを RUN にすると、プロセス操業、調整の状況によっては、実際の I/O
が働き、プロセス機器が作動することになります。この意味で、コントローラを RUN
にするときは、プロセス操業、調整の監督者の許可を得て行ってください。
・ コントローラを RUN にするには、HALT にするときと同様に、ローカルまたはリモ
ートで行う方法があります。
・ ローカルで行うには、コントローラ機種により異なります。ハードウェアの取り扱
い説明書を参照してください。
・ リモートで行うには、次の二つの方法があります。
- [システムビュー]
- [コントローラの実行]
[システムビュー]を使用する場合:
1) 前項の一括ダウンロード終了時、ボタン[システムビュー]を押します。
○補足
・システムビューの起動は、次の方法でも行えます。
・ [プロダクトツリー]にてステーションをクリックし、メニュー<ファイル><シス
テムビュー>を実行
2) [システムビュー]のモニタコントロールで[開始]を実行し、データをリフレッシ
ュしておきます。

7.2 コントローラへ一括ダウンロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 441
3) 該当コントローラや他のコントローラの運転状態を確認します。
4) [↑][↓]キーを使って、該当のコントローラにフォーカスします。
5) メニュー<ツール><運転モード設定>を実行します。
6) ボタン[ RUN ]を実行します。
7) [はい]を実行すれば、運転モードを RUN に切り替えます。[いいえ]を実行すれ
ば、運転切り替えをキャンセルします。
[コントローラの実行]を使用する場合:
1) 前項の一括ダウンロード終了時、ボタン[コントローラの実行]を押します。
○補足
・ 二重化ステーションでは安全に配慮して本機能をサポートしていません。上述の[システムビュ
ー]を使用してください。
2) 表示されるダイアログに従い、コントローラの実行(運転モードを RUN にする)を
行います。
ここで、ダイアログに表示されるボタンの意味は以下のとおりです。
- はい:コントローラの実行を行います。
- いいえ:処理をスキップします。
- キャンセル:処理を中断します。
■ コントローラへ I/O 構成情報をオンラインでダウンロードする
I/O 構成情報をオンラインでダウンロードする機能です。稼働中のコントローラをHA
LT(一時停止状態)にすることなく、TC-net I/O モジュールの追加とパラメ
ータの変更ができます。
I/O 構成オンラインダウンロードをサポートするコントローラの機種とバージョンに
ついては、以下のとおりです。
対象コントローラ
PU811 PU866 PU821 PU871
I/O 構成 オンラインダウンロード
○ (*1) ○ (*1) - -
(*1): 基本ソフトウェア V01.20 以上にてサポート
○補足
・ I/O 構成オンラインダウンロードが実行できる前提条件は以下のとおりです。
・ 本機能をサポートしたエンジニアリングツールからコンフィグレーション情報をダウンロード
済みである。
・ 追加・変更する I/O の接続先であるノードのパラメータが「縮退あり」に設定されている。
・ 一般 TC-net I/O のみ追加している。
・ 特殊 I/O(FL911,MD911)を追加していない。
・ I/O モジュールを削除していない。
・ 既存モジュールのパラメータである I/O ループスキャン速度が変更されていない。
・ これらの条件に合わない場合には、一括または分割ダウンロードにてコンフィグレーション情
報をダウンロードしてください。

第 7 章 ダウンロード/アップロード
6E8C4890 442
1) [プロダクトツリー]にて該当ステーションをマウスでクリックし、メニュー<ファ
イル><ダウンロード>を実行します。表示された下記画面にて、「I/O 構成 オン
ラインダウンロード゙」を選択します。
2) ボタン[次へ]をクリックして、表示された下記画面にて、対象のコントローラを
選択します。

7.2 コントローラへ一括ダウンロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 443
3) ボタン[次へ]をクリックするとダウンロード対象の I/O モジュールを表示します。
4) ボタン[次へ]をクリックすると、ダウンロードを開始します。
■ コントローラへ I/O コネククションをオンラインでダウンロードする
I/O 変数、ネットワーク変数、およびステーション変数の一括入出力指定(I/O コネ
クション)をオンラインでダウンロードする機能です。稼働中のコントローラをHAL
T(一時停止状態)にすることなく、後から追加した変数の一括入出力を実行させるこ
とができます。
I/O コネクションオンラインダウンロードをサポートするコントローラの機種とバー
ジョンについては、以下のとおりです。
対象コントローラ
PU811 PU866 PU821 PU871 I/O コネクション
オンラインダウンロード ○ (*1) ○ (*1) - -
(*1): 基本ソフトウェア V01.20 以上にてサポート

第 7 章 ダウンロード/アップロード
6E8C4890 444
○補足
・ I/O ネクション・オンラインダウンロードが実行できる前提条件は以下のとおりです。
・ 本機能をサポートしたエンジニアリングツールからコンフィグレーション情報をダウンロード
済みである。
・ コントローラのコンフィグレーション情報を他のツールからは変更していない。
・ 対象となる I/O コネクションのコネクション種別には既に登録があり、初めてのダウンロード
ではない。
・ 追加する I/O コネクションは64ワード以内である。
・ 既存の I/O コネクションを変更または削除していない。
・ 登録済の I/O コネクションの領域を変更していない。
・ タスク種別の領域を変更していない。
・ I/O コネクションを使用する I/O ジュールを新規に追加登録していない。
・ I/O 変数(RI/O 指定あり)の変数をネットワークに割り付けていない。
これらの条件に合わない場合には、一括または分割ダウンロードにてコンフィグレーション情
報をダウンロードしてください。
以下に、ダウンロードを実行する手順を説明します。
1) [プロダクトツリー]にて該当ステーションをマウスでクリックし、メニュー<ファ
イル><ダウンロード>を実行します。表示された下記画面にて、「I/O コネクショ
ン オンラインダウンロード」を選択します。

7.2 コントローラへ一括ダウンロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 445
2) ボタン[次へ]をクリックして、表示された下記画面にて、対象のコントローラを
選択します。
3) ダウンロード対象のコネクションを知りたい場合は、対象のコントローラに[詳細]
ボタンを押すと DL する内容が表示されます。内容を確認後、[閉じる]を押して元
の画面に戻ります。
○補足
・ このチェック画面はプロダクトツリーからも表示できます。チェック対象のコントローラを選
択し、<ファイル><オンラインDLチェック>を実行します。
4) ボタン[次へ]をクリックすると、ダウンロードを開始します。

第 7 章 ダウンロード/アップロード
6E8C4890 446
7.2.2 V シリーズのコントローラへ一括ダウンロードする
1 台のコントローラへ「コンフィグレーション」、「プログラム」、「グローバル変数」
を一括でダウンロードする手順、逆生成のためのツールソースをオンラインでダウンロ
ードする手順、I/O コネクションをオンラインでダウンロードする手順について説明し
ます。
ステーションの配下に複数のコントローラが存在している場合は、次の点に注意して
一括ダウンロードを行ってください。
「協調制御」パラメータを変更した場合は、同一ステーション内の全てのコントロー
ラへ一括ダウンロードを行ってください。
ツールソースのダウンロード、および逆生成をサポートするコントローラの機種とバ
ージョンについては、以下のとおりです。
対象コントローラ
L3 L2 L1, LC S3 STC S2 R3 FN
逆生成
○ (*1) ○ (*2) ○ (*3) ○ (*4) - ○ (*5) - -
(*1): 基本ソフトウェア V3.10 以上 (但し、L3PU21 は V3.11 以上) (*2): 基本ソフトウェア V3.10 以上 (*3): 基本ソフトウェア V2.30 以上 (*4): 基本ソフトウェア V02.61 以上 (但し、BU74A に実装した場合を除く) (*5): 基本ソフトウェア V02.60 以上 (但し、S2PU82 は V02.00 以上)
■ダウンロードの種類と手順概要
・ 一括ダウンロード/分割ダウンロード (ツールソース無し)
1 台のコントローラへ「コンフィグレーション」、「プログラム」、「グローバル変数」
を一括、または分割してダウンロードする機能です。アップロード時にアプリケー
ションを復元(逆生成)しない場合、またはツールソースのみを後からダウンロー
ドする場合に利用します。
なお、オンライン中にはダウンロードできないため、ダウンロード前にコントロー
ラを HALT(一時休止状態)にする必要があります。
手順は以下のとおりです。各手順の詳細については、各項を参照してください。
1)コントローラを HALT(一時休止状態)にする。
2)コントローラへ一括ダウンロードする。 (ツールソース無し)
3)コントローラを RUN(運転状態)にする。
・ 一括ダウンロード/分割ダウンロード (ツールソース付き)
1 台のコントローラへ「コンフィグレーション」、「プログラム」、「グローバル変数」
を一括、または分割してダウンロードする機能です。アップロード時にアプリケー
ションを復元(逆生成)するためのソースを一緒にダウンロードする場合に利用し
ます。
なお、オンライン中にダウンロードできないため、ダウンロード前にコントローラ
を HALT(一時休止状態)にする必要があります。

7.2 コントローラへ一括ダウンロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 447
手順は以下のとおりです。各手順の詳細については、各項を参照してください。
1)コントローラを HALT(一時休止状態)にする。
2)コントローラへ一括ダウンロードする。 (ツールソース付き)
3)コントローラを RUN(運転状態)にする。
・ 逆生成のためのツールソースをダウンロード
アップロード時にアプリケーションを復元(逆生成)するためにコントローラへソ
ースのみをオンラインでダウンロードする機能です。デバッグ完了時など 後にソ
ースのみをダウンロードする場合に利用します。
なお、オンライン中のダウンロードが可能です。
手順は以下のとおりです。手順の詳細については、該当の項を参照してください。
1)コントローラへツールソースのみをダウンロードする。
・ I/O コネククションをオンラインでダウンロード
ネットワーク変数、およびステーション変数の一括入出力指定(I/O コネクション)
をオンラインでダウンロードする機能です。稼働中のコントローラをHALT(一
時停止状態)にすることなく、後から追加した変数の一括入出力を実行させたい場
合に利用します。
手順は以下のとおりです。各手順の詳細については、各項を参照してください。
1)コントローラへ I/O コネクションをオンラインでダウンロードする。
・ シリアル I/O をオンラインでダウンロード
シリアル I/O のユニット情報をオンラインでダウンロードする機能です。稼働中の
コントローラをHALT(一時停止状態)にすることなく、一部の I/O モジュール
でオンライン脱着、データ処理の変更を行いたい場合に利用します。
手順は以下のとおりです。各手順の詳細については、各項を参照してください。
1)コントローラへシリアル I/O のユニット情報をオンラインで個別ダウンロード
する。
■ コントローラを HALT(一時休止状態)にする。
・ 一括ダウンロードするには、コントローラをHALTにする必要があります。
・ コントローラがプロセス操業または調整段階にあるとき、HALT にすれば、そのコ
ントローラの制御演算はすべて停止します。このとき HALT にしてよいかは、操業
の観点から判断する必要があります。操業監督者、または操業監督者から権限を委
譲されている調整監督者の許可を得て行ってください。
・ コントローラを HALT に切り替えるには、ローカルでコントローラの正面パネルの
SW で行う方法と、リモートでツールから行う方法があります。
・ ローカルで行うには、コントローラ機種により異なります。ハードウェアの取り扱
い説明書を参照してください。
・ リモートで行うには、次の2とおりの操作があります。
1)[システムビュー]の[運転モード設定]にて、運転モードをHALT に切り替える。
2)一括ダウンロードの手順の途中で、運転モードを HALT に切り替える。

第 7 章 ダウンロード/アップロード
6E8C4890 448
■ コントローラへ一括ダウンロードする。 (ツールソース無し)
1) [プロダクトツリー]にて該当ステーションをマウスでクリックし、メニュー<ファ
イル><ダウンロード>を実行します。表示された下記画面にて、「一括ダウンロー
ド/分割ダウンロード」を選択します。
2) ボタン[次へ]をクリックして、表示された下記画面にて、ダウンロード単位を選択
します。
・ 一括ダウンロード: コントローラをメモリクリアして、「コンフィグレーション」、
「プログラム」、「グローバル変数」をすべてダウンロードします。
・ 分割ダウンロード: メモリクリアしないで、「コンフィグレーション」、「プログラ
ム」、「グローバル変数」を指定してダウンロードします。
二重化ステーションでは、さらに以下のオプションも選択します。(シングル構成で
は表示されません。)
・ 二重化ダウンロード: 二重化両系を HALT にした後に、プライマリ側へダウンロ
ードします。
・ 単独ダウンロード: 指定されたプライマリ側、セカンダリ側のいずれかを HALT
にした後に、指定側へダウンロードします。

7.2 コントローラへ一括ダウンロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 449
○補足
・ 「二重化ダウンロード」機能は、コントローラが二重化の実行を開始する時の自動イコライズ
機能を使用することを前提としています。よってダウンロードの完了直後は、二重化両系のデ
ータは一致していません。二重化運転する場合には、必ずプライマリ側、セカンダリ側の順で
コントローラを RUN にしてください。
3) ボタン[次へ]をクリックして、ダウンロード先のコントローラをチェックします。
このとき、2)で分割ダウンロードを選択しているとダウンロード対象確認ダイアロ
グが出るので、必要な項目にチェックします。
4) ボタン[次へ]をクリックすると、ダウンロード実行の確認ダイアログが出るので、
状況に応じて実行します。[はい]のとき、コントローラへのダウンロードを開始し
ます。[いいえ]でダウンロードはすべてキャンセルされます。
○補足
・ MELPLAC I/O 接続の場合は、ここで自動的にベリファイ機能が起動されます。詳細について
は、「2.4 モジュールパラメータを登録する」を参照してください。

第 7 章 ダウンロード/アップロード
6E8C4890 450
5) ダウンロードが開始され、「コンフィグレーション」「プログラム」「グローバル変数」
を、次々にコントローラへ転送開始します。終了すれば、下図ダイアログが表示さ
れ、一括ダウンロードは完了です。
○補足
・ 一括ダウンロードが完了しても、コントローラの運転モードは DL-WAIT のまま変化しません。
DL-WAIT から遷移できるのは、RUN のみです。運転モードをRUNにする操作は次項で説明
します。
・ RS232C で接続していて一括ダウンロードを実行しているときは、RS232C ケーブルの抜き差
しをしないでください。
■ コントローラを RUN(運転状態)にする。
・コントローラをRUNにすると、コントローラはその制御演算をすべて実行するよう
になります。
・コントローラをRUNにすると、プロセス操業、調整の状況によっては、実際の I/O
が働き、プロセス機器が作動することになります。この意味で、コントローラをR
UNにするときは、プロセス操業、調整の監督者の許可を得て行ってください。
・コントローラをRUNにするには、HALT にするときと同様に、ローカルまたはリモ
ートで行う方法があります。
・ローカルで行うには、コントローラ機種により異なります。ハードウェアの取り扱い
説明書を参照してください。
・リモートで行うには、次の二つの方法があります。
- [システムビュー]
- [コントローラの実行]
[システムビュー]を使用する場合:
1) 前項の一括ダウンロード終了時、ボタン[システムビュー]を押します。
○補足
・ システムビューの起動は、次の方法でも行えます。

7.2 コントローラへ一括ダウンロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 451
・ [プロダクトツリー]にてステーションをクリックし、メニュー<ファイル><シス
テムビュー>を実行
2) [システムビュー]のモニタコントロールで[開始]を実行し、データをリフレッ
シュしておきます。
3) 該当コントローラや他のコントローラの運転状態を確認します。
4) [↑][↓]キーを使って、該当のコントローラにフォーカスします。
5) メニュー<ツール><運転モード設定>を実行します。
6) ボタン[ RUN ]を実行します。
7) [はい]を実行すれば、運転モードを RUN に切り替えます。[いいえ]を実行す
れば、運転切り替えをキャンセルします。
[コントローラの実行]を使用する場合:
1) 前項の一括ダウンロード終了時、ボタン[コントローラの実行]を押します。
○補足
・ 二重化ステーションでは安全に配慮して本機能をサポートしていません。上述の[システムビュ
ー]を使用してください。
2) 表示されるダイアログに従い、ダウンロード内容のバックアップ(FROM 書き込
み)と、コントローラの実行(運転モードを RUN にする)を行います。
○補足
・ 「ダウンロード内容のバックアップ」は、一部のコントローラでサポートしていません。
ここで、ダイアログに表示されるボタンの意味は以下のとおりです。
- はい:ダウンロード内容のバックアップまたは、コントローラの実行を行います。
- いいえ:処理をスキップします。
- キャンセル:処理を中断します。
[コントローラの実行]をサポートするコントローラの機種とバージョンについて
は、以下のとおりです。
対象コントローラ
L3 L2 L1, LC S3 STC S2 R3 FN コントローラの実行
○ (*2)
○ (*2)
○ (*1)
○
○
○
○
○ (*2)
(*1): 基本ソフトウェア V2.51 以上にてサポート (*2): ダウンロード内容のバックアップはサポート対象外

第 7 章 ダウンロード/アップロード
6E8C4890 452
■コントローラへ一括ダウンロードする。 (ツールソース付き)
コントローラから「コンフィグレーション」、「グローバル変数」、「プログラム」をアッ
プロードし、ツール登録の 終状態を復元(逆生成)することができます。この場合、
ツール登録のソース情報(以下、ツールソースと呼びます)を予めコントローラにダウ
ンロードしておく必要があります。
以下に、コントローラにツールソースをダウンロードする手順を説明します。
1)ツールソースを作成する。
[プロダクトツリー]にて該当ステーションをマウスでクリックし、メニュー<ファ
イル><開く><ダウンロード>を実行します。ボタン[ツールソース作成]をクリ
ックします。
下記のツールソース作成画面にて、ツールソースを配置するコントローラをチェックし
ます。
○補足
・ ツールソースを削除するときは、チェックを外してください。
・ツールソースは下記の単位で配置します。
ネットワーク構成、ネットワーク変数、ユーザ定義型 システム単位
ハード構成、ステーション変数 ステーション単位
コントローラ変数、プログラム コントローラ単位

7.2 コントローラへ一括ダウンロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 453
・ ボタン[既定の配置]: クリックすると、上記単位の若いスロットのコントローラ
にチェックが付きます。
・ 「コメントを含める」: 変数等のコメントを含めてツールソースを作成するとき、
チェックします。
・ 「プログラムモニタ情報を含める」:プログラムのモニタを行うための情報を含めて
ツールソースを作成するとき、チェックします。プログラムモニタ情報を含めない
でツールソースを作成した場合は、アップロードした後にプログラムモニタ情報の
再構成(一括コンパイル)が必要になります。
・ ボタン[作成]: クリックすると、ツールソースの作成を開始します。途中で中断
するときは、ボタン[キャンセル]をクリックします。
・ ツールソースは、POU としてコントローラに格納されます。コントローラのメモリ
消費状態を「リソースレポート」で確認してください。
○補足
・ ツールソースの作成を行うと、対象コントローラの POU エントリを末尾から 7 つ消費します。
・ ツールソース量は、プログラム逆生成を使用しない場合に比較して、メモリを2~3倍消費す
ることがあります。アプリケーション内容によりメモリ消費量は変動するため、ツールソース
作成後に、「リソースレポート」にて実消費量を確認してください。「リソースレポート」の操
作方法については、「8.8 プログラムの空き容量を知る」を参照ください。
・ ツールソースのサイズが大きいために、ツールソース付きのダウンロードができない場合は、
チェックボックス「プログラムモニタ情報を含める」「コメントを含める」を外すとファイル量
が削減されます。
なお、チェックボックス「プログラムモニタ情報を含める」を外した場合は、アップロード・
逆生成後に一括コンパイルを実行してください。モニタ情報が再構成されます。
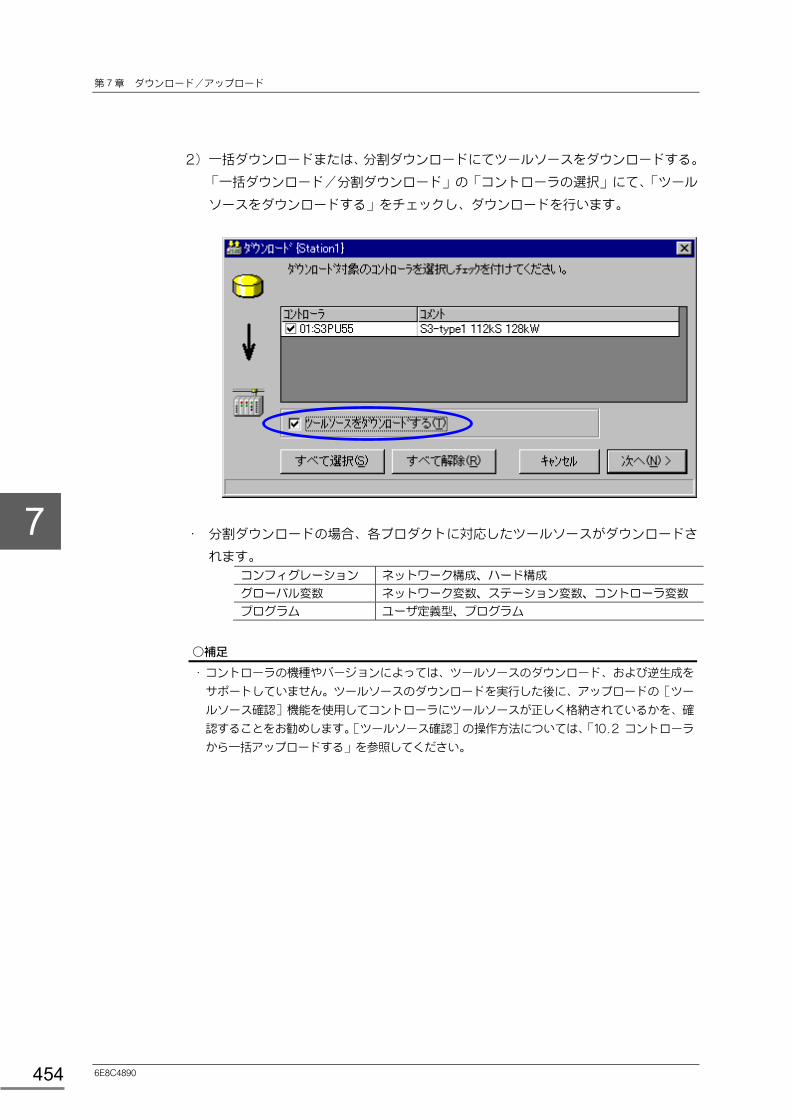
第 7 章 ダウンロード/アップロード
6E8C4890 454
2) 一括ダウンロードまたは、分割ダウンロードにてツールソースをダウンロードする。
「一括ダウンロード/分割ダウンロード」の「コントローラの選択」にて、「ツール
ソースをダウンロードする」をチェックし、ダウンロードを行います。
・ 分割ダウンロードの場合、各プロダクトに対応したツールソースがダウンロードさ
れます。 コンフィグレーション ネットワーク構成、ハード構成
グローバル変数 ネットワーク変数、ステーション変数、コントローラ変数
プログラム ユーザ定義型、プログラム
○補足
・ コントローラの機種やバージョンによっては、ツールソースのダウンロード、および逆生成を
サポートしていません。ツールソースのダウンロードを実行した後に、アップロードの[ツー
ルソース確認]機能を使用してコントローラにツールソースが正しく格納されているかを、確
認することをお勧めします。[ツールソース確認]の操作方法については、「10.2 コントローラ
から一括アップロードする」を参照してください。

7.2 コントローラへ一括ダウンロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 455
■コントローラへツールソースのみをダウンロードする。
1) ダウンロードの起動画面にて、「ツールソースのダウンロード」を選択し、ボタン[次
へ]をクリックします。
2) ダウンロード先のコントローラをチェックし、ボタン[次へ]をクリックすると、ツ
ールソースのダウンロードを開始します。
○補足
・ コントローラの機種やバージョンによっては、ツールソースのダウンロード、および逆生成を
サポートしていません。ツールソースのダウンロードを実行した後に、アップロードの[ツー
ルソース確認]機能を使用してコントローラにツールソースが正しく格納されているかを、確
認することをお勧めします。[ツールソース確認]の操作方法については、「10.2 コントローラ
から一括アップロードする」を参照してください。

第 7 章 ダウンロード/アップロード
6E8C4890 456
■ コントローラへ I/O コネククションをオンラインでダウンロードする
ネットワーク変数、およびステーション変数の一括入出力指定(I/O コネクション)を
オンラインでダウンロードする機能です。稼働中のコントローラをHALT(一時停止
状態)にすることなく、後から追加した変数の一括入出力を実行させることができます。
I/O コネクション・オンラインダウンロードをサポートするコントローラの機種とバー
ジョンについては、以下のとおりです。
対象コントローラ
L3 L2 L1, LC S3 STC S2 R3 FN I/O コネクション・オンライン ダウンロード
- - - ○
(*1)○
(*2) ○
(*3) - -
(*1): 基本ソフトウェア V02.7C 以上にてサポート (*2): 基本ソフトウェア V02.56 以上にてサポート (*3): S2PU82 のみサポート。基本ソフトウェア V02.00 以上にてサポート
○補足
・ I/O コネクション・オンラインダウンロードが実行できる前提条件は以下のとおりです。
・ 本機能をサポートしたエンジニアリングツールからコンフィグレーション情報をダウンロード
済みである。
・ コントローラのコンフィグレーション情報を他のツールからは変更していない。
・ 対象となる I/O コネクションのコネクション種別には既に登録があり、初めてのダウンロード
ではない。
・ 既存の I/O コネクションを変更または削除していない。
・ I/O コネクションの領域を変更していない。
・ I/O コネクションを使用する I/O モジュールを新規に追加登録していない。
これらの条件に合わない場合には、一括または分割ダウンロードにてコンフィグレーション情
報をダウンロードしてください。
●注記
・ ダウンロードするコネクション数が 65 以上の場合、伝送が複数回になります。この場合同期書
き込みされませんので注意してください。
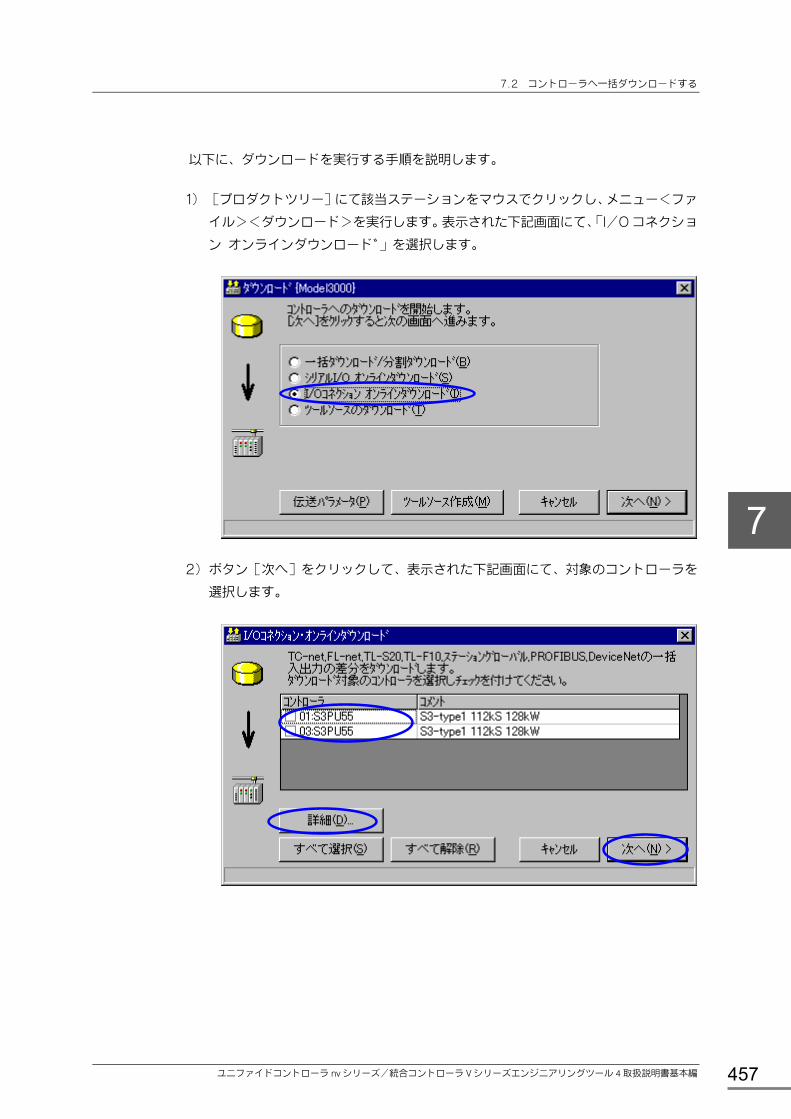
7.2 コントローラへ一括ダウンロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 457
以下に、ダウンロードを実行する手順を説明します。
1) [プロダクトツリー]にて該当ステーションをマウスでクリックし、メニュー<ファ
イル><ダウンロード>を実行します。表示された下記画面にて、「I/O コネクショ
ン オンラインダウンロード゙」を選択します。
2) ボタン[次へ]をクリックして、表示された下記画面にて、対象のコントローラを
選択します。
I/O コネクション オンラインダウンロード TC-net,FL-net,TL-S20,TL-F10,ステーショングローバル,PROFIBUS,Devicenet の 一括入出力指定の差分をダウンロードします。

第 7 章 ダウンロード/アップロード
6E8C4890 458
3) [詳細]ボタンを押すと DL する内容が表示されます。内容を確認後、[閉じる]を
押して元の画面に戻ります。
4) ボタン[次へ]をクリックすると、ダウンロードを開始します。
■ コントローラへシリアル I/O のユニット情報をオンラインで個別ダウンロード
する
シリアル I/O のユニット情報をオンラインでダウンロードする機能です。稼働中のコ
ントローラを HALT(一時停止状態)にすることなく、一部の I/O モジュールでオン
ライン脱着、データ処理の変更を行うことができます。
シリアル I/O・オンラインダウンロードをサポートするコントローラの機種は、以下の
とおりです。
対象コントローラ
L3 L2 L1, LC S3 STC S2 R3 FNシリアル I/O・オンライン
ダウンロード ○ ○ ○ - - - - -
○補足
・ シリアル I/O・オンラインダウンロードが実行できる前提条件は以下のとおりです。
・ ツール側の登録において、メインユニットの構成、およびコントローラのパラメータは変更し
ていない。
・ コントローラ側へダウンロードされている情報のうちで、メインユニットの構成、およびコン
トローラのパラメータを、他のツールから変更していない。
これらの条件に合わない場合には、一括または分割ダウンロードにてコンフィグレーション情
報としてダウンロードしてください。

7.2 コントローラへ一括ダウンロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 459
以下に、ダウンロードを実行する手順を説明します。
1) [プロダクトツリー]にて該当ステーションをマウスでクリックし、メニュー<ファ
イル><ダウンロード>を実行します。表示された下記画面にて、「シリアル I/O オ
ンラインダウンロード゙」を選択します。
2) ボタン[次へ]をクリックして、表示された下記画面にて、対象の I/O ユニットを
選択します。
ここで、未登録のユニット No.を選択することも可能です。ユニットの登録を削除
した後に該当のユニット情報をクリアするときに使用します。
3) ボタン[次へ]をクリックし、表示される内容に従って操作すると、ダウンロードを
開始します。

第 7 章 ダウンロード/アップロード
6E8C4890 460
7.3 タスクを個別にダウンロードする
コントローラへ一括ダウンロードすると、「コンフィグレーション」、「プログラム」、
「グローバル変数」がコントローラへすべて転送されます。その後、制御プログラムに
変更が生じた場合、そのタスクだけを個別にダウンロードすることができます。このタ
スクとは、実際、1つのタスクエントリに割り当てたプロジェクト単位を指します。こ
の個別のダウンロードは、コントローラがRUN/HALT いずれの運転モード(状態)
でも実行できます。個別ダウンロードは、「プログラムエディタ」で行います。
■個別ダウンロードの手順
・ [タスクエントリ]から[プログラムエディタ]を起動します。
・ プログラムの表示、編集、保存は、必要に応じて、前出の「制御プログラムの作成」
に従って行ってください。ここでは、希望するタスクの保存が終了している状態と
して、ダウンロードの手順を説明します。
1) メニュー<ファイル><コントローラへ書き込み>を選択します。
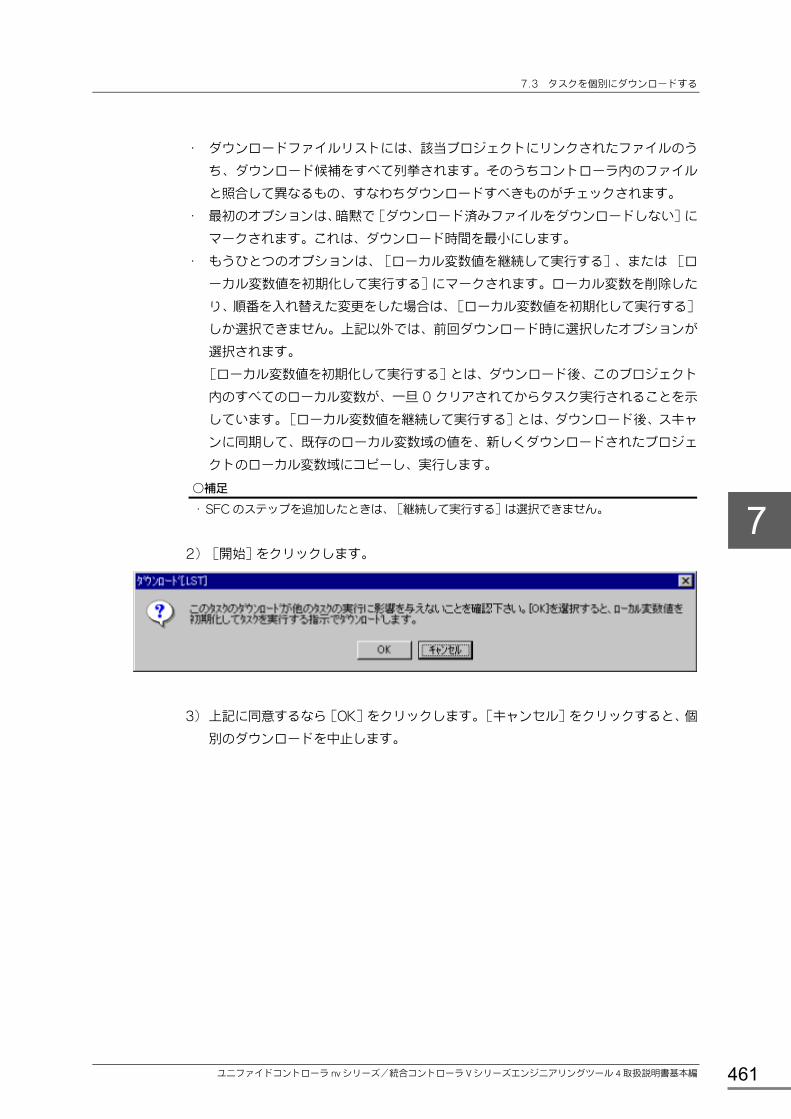
7.3 タスクを個別にダウンロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 461
・ ダウンロードファイルリストには、該当プロジェクトにリンクされたファイルのう
ち、ダウンロード候補をすべて列挙されます。そのうちコントローラ内のファイル
と照合して異なるもの、すなわちダウンロードすべきものがチェックされます。
・ 初のオプションは、暗黙で[ダウンロード済みファイルをダウンロードしない]に
マークされます。これは、ダウンロード時間を 小にします。
・ もうひとつのオプションは、[ローカル変数値を継続して実行する]、または [ロ
ーカル変数値を初期化して実行する]にマークされます。ローカル変数を削除した
り、順番を入れ替えた変更をした場合は、[ローカル変数値を初期化して実行する]
しか選択できません。上記以外では、前回ダウンロード時に選択したオプションが
選択されます。
[ローカル変数値を初期化して実行する]とは、ダウンロード後、このプロジェクト
内のすべてのローカル変数が、一旦 0 クリアされてからタスク実行されることを示
しています。[ローカル変数値を継続して実行する]とは、ダウンロード後、スキャ
ンに同期して、既存のローカル変数域の値を、新しくダウンロードされたプロジェ
クトのローカル変数域にコピーし、実行します。
○補足
・ SFC のステップを追加したときは、[継続して実行する]は選択できません。
2) [開始]をクリックします。
3) 上記に同意するなら[OK]をクリックします。[キャンセル]をクリックすると、個
別のダウンロードを中止します。

第 7 章 ダウンロード/アップロード
6E8C4890 462
7.4 コントローラから一括アップロードする
コントローラから「コンフィグレーション」、「グローバル変数」、「プログラム」をア
ップロードし、ツール登録の 終状態を復元(逆生成)することができます。この場合、
ツール登録のソース情報(以下、ツールソースと呼びます)を予めコントローラにダウ
ンロードしておく必要があります。(ツールソースのダウンロードについては、「7.2 コ
ントローラへ一括ダウンロードする」を参照してください。)
以下に、コントローラからアップロードする手順を説明します。
○補足
・ 一括アップロードにより、ツールの登録データが上書きされますので、既存システムにアップ
ロードするときは、システムのバックアップをお願いします。(システムのバックアップについ
ては、「11.1 ユーザシステムのインポート/エクスポートを実行する」を参照してください。)
■アップロードの準備
逆生成を行う場合は、下記の登録が必要です。
・ RS-232C で接続する場合、ステーションの登録。
・ Ethernet で接続する場合、ステーション、メインユニット、伝送モジュール(IP
アドレス)の登録。
・ RS-485 で接続する場合、ステーション、メインユニット、S モジュール(RS485
ステーション No.)の登録。
逆生成を行わない場合(グローバル変数の値のみのアップロード)は、メインユニット
構成の登録をツールとコントローラで一致させてください。
○補足
・ 逆生成をサポートするコントローラの機種とバージョンについては、「7.2 コントローラへ一括
ダウンロードする」を参照してください。
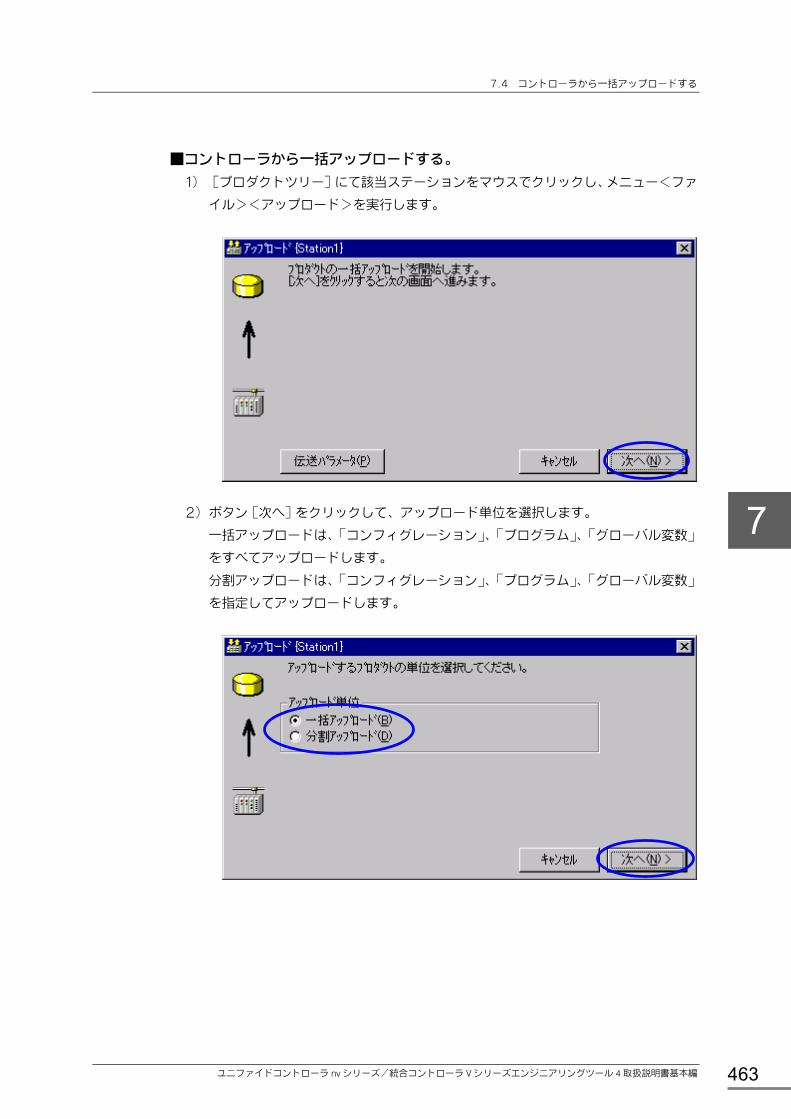
7.4 コントローラから一括アップロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 463
■コントローラから一括アップロードする。
1) [プロダクトツリー]にて該当ステーションをマウスでクリックし、メニュー<ファ
イル><アップロード>を実行します。
2) ボタン[次へ]をクリックして、アップロード単位を選択します。
一括アップロードは、「コンフィグレーション」、「プログラム」、「グローバル変数」
をすべてアップロードします。
分割アップロードは、「コンフィグレーション」、「プログラム」、「グローバル変数」
を指定してアップロードします。

第 7 章 ダウンロード/アップロード
6E8C4890 464
3) ボタン[次へ]をクリックして、アップロード先のコントローラをチェックします。
逆生成を行う場合は、「ツールソースをアップロードし、逆生成する」をチェックし
ます。コントローラに格納されているツールソースを確認する場合は、ボタン[ツ
ールソース確認]をクリックします。ツールソースの一覧が表示されます。
「ツールソースをアップロードし、逆生成する」をチェックしない場合は、「コンフ
ィグレーション」、「プログラム」、「グローバル変数」の逆生成は行わず、グローバ
ル変数の値のみアップロードします。
ボタン[次へ]をクリックします。
このとき、2)で分割アップロードを選択しているとアップロード対象確認ダイアロ
グが出るので、必要な項目にチェックします。

7.4 コントローラから一括アップロードする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 465
分割アップロードの場合、各プロダクトに対応したツールソースがアップロードされます。
コンフィグレーション ネットワーク構成、ハード構成
グローバル変数 ネットワーク変数、ステーション変数、コントローラ変数
プログラム ユーザ定義型、プログラム
○補足
・ ツールソースを複数のコントローラに分配している場合は、下記の順でアップロードをお願い
します。
(1)ネットワーク構成、(2)ハード構成、(3)ユーザ定義型、(4)ネットワーク変数、ステー
ション変数、コントローラ変数、プログラム((4)は、順不同)
上記の順でアップロードされるように、分割アップロードにて対応するプロダクトを順次アッ
プロードしてください。
4) ボタン[次へ]をクリックすると、アップロード実行の確認ダイアログが出るので、
状況に応じて実行します。[はい]のとき、アップロードを開始します。[いいえ]
でアップロードはすべてキャンセルされます。
5) アップロードが開始され、「コンフィグレーション」「プログラム」「グローバル変数」
を、次々にエンジニアリングツールへ転送します。終了すれば、下図ダイアログが
表示され、一括アップロードは完了です。
●注記
・ RS232C で接続していて一括アップロードを実行しているときは、RS232C ケーブルの抜き差
しをしないでください。
・ツールソースをアップロードし逆生成する場合で、アップロード後に次のメッセージが表示され
ることが有ります。このメッセージが表示された場合は、プログラムモニタ情報がアップロー
ドされていませんので、一括コンパイルを行ってプログラムモニタ情報を再構成してください。

第 7 章 ダウンロード/アップロード
6E8C4890 466

467
第 8 章 制御プログラムのモニタ ここでは、「プログラムエディタ」で制御プログラムをモニタするときの操作を説明します。
8.1 セミグラフィック ········································································469
8.1.1 プログラムをモニタする ···············································469
8.1.2 ファンクション内部をモニタする·································470
8.1.3 ファンクションブロック内部をモニタする ··················470
8.1.4 オンラインでフォースをかける ····································471
8.1.5 オンラインでスワップする············································474
8.1.6 シーケンスタグを操作する············································476
8.2 テキスト·······················································································481
8.2.1 プログラムをモニタする ···············································481
8.2.2 ファンクション内部をモニタする·································482
8.2.3 ファンクションブロック内部をモニタする ··················482
8.3 フルグラフィック ········································································483
8.3.1 プログラムをモニタする ···············································483
8.3.2 ファンクション内部をモニタする·································484
8.3.3 ファンクションブロック内部をモニタする ··················485
8.3.4 オンラインでフォースをかける ····································485
8.3.5 オンラインでスワップする············································489
8.3.6 シーケンスタグを操作する············································491
8.3.7 モニターのモードを選択する ········································495

第 8 章 制御プログラムのモニタ
6E8C4890 468
8.4 プログラムといっしょにデータをモニタする ····························500
8.5 任意のデータをモニタする ·························································501
8.6 複数のタスクを同時にモニタする ··············································502
8.7 プログラムモニタを外部から起動する ·······································506
8.8 プログラムの空き容量を知る······················································509
8.9 プログラムやデータファイルを比較する ···································512
8.10 データをトレースする·································································520
8.11 I/O 入力点にフォースをかける ·················································527

8.1 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 469
8.1 セミグラフィック
ここでは、「プログラムエディタ(セミグラフィック)」で LD(ラダー・ダイヤグラ
ム)/FBD(ファンクション・ブロック・ダイヤグラム)/SFC(シーケンシャル・フ
ァンクション・チャート)の制御プログラムをモニタするときの操作を説明します。
・プログラムをモニタする
・ファンクション内部をモニタする
・ファンクションブロック内部をモニタする
・オンラインでフォースをかける
・オンラインでスワップする
・シーケンスタグを操作する
8.1.1 プログラムをモニタする
LD(ラダー・ダイヤグラム)/FBD(ファンクション・ブロック・ダイヤグラム)/SFC
(シーケンシャル・ファンクション・チャート)のモニタの仕方を説明します。
■モニタの開始
・ プログラムのモニタを開始する場合は、メインビューにカーソルがある状態で、画
面上の<開始>ボタンまたは、メニュー<モニタ><モニタ開始>を選択します。
モニタ中は、画面上の[Monitor]が点滅します。
■モニタの停止
・ プログラムのモニタを停止する場合は、画面上の<停止>ボタンまたは、メニュー
<モニタ><モニタ停止>を選択します。

第 8 章 制御プログラムのモニタ
6E8C4890 470
8.1.2 ファンクション内部をモニタする
ユーザが作成した任意のファンクションの内部のモニタの仕方を説明します。
■呼び出し元を指定して開く
・ プログラムのモニタが開始されているときに、モニタしたいファンクションの先頭
にカーソルを置き、右クリックメニュー<ファンクション・ファンクションブロッ
ク内部を開く>を選択します。
・ 指定したファンクションの内部が表示され、モニタが開始されます。
8.1.3 ファンクションブロック内部をモニタする
ユーザが作成した任意のファンクションブロックの内部のモニタの仕方を説明しま
す。
■呼び出し元を指定して開く
・ プログラムのモニタが開始されているときに、モニタしたいファンクションブロッ
クの先頭にカーソルを置き、右クリックメニュー<ファンクション・ファンクショ
ンブロック内部を開く>を選択します。
・ 指定したファンクションブロックの内部が表示され、モニタが開始されます。
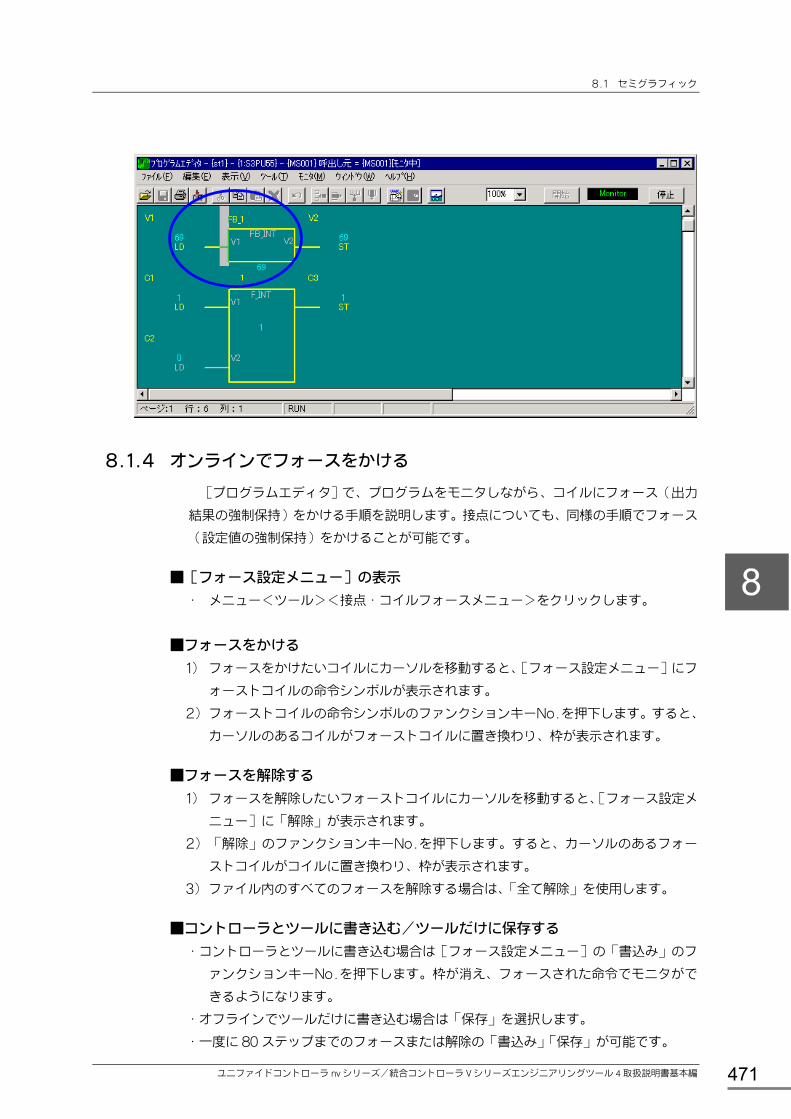
8.1 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 471
8.1.4 オンラインでフォースをかける
[プログラムエディタ]で、プログラムをモニタしながら、コイルにフォース(出力
結果の強制保持)をかける手順を説明します。接点についても、同様の手順でフォース
(設定値の強制保持)をかけることが可能です。
■[フォース設定メニュー]の表示
・ メニュー<ツール><接点・コイルフォースメニュー>をクリックします。
■フォースをかける
1) フォースをかけたいコイルにカーソルを移動すると、[フォース設定メニュー]にフ
ォーストコイルの命令シンボルが表示されます。
2) フォーストコイルの命令シンボルのファンクションキーNo.を押下します。すると、
カーソルのあるコイルがフォーストコイルに置き換わり、枠が表示されます。
■フォースを解除する
1) フォースを解除したいフォーストコイルにカーソルを移動すると、[フォース設定メ
ニュー]に「解除」が表示されます。
2) 「解除」のファンクションキーNo.を押下します。すると、カーソルのあるフォー
ストコイルがコイルに置き換わり、枠が表示されます。
3) ファイル内のすべてのフォースを解除する場合は、「全て解除」を使用します。
■コントローラとツールに書き込む/ツールだけに保存する
・コントローラとツールに書き込む場合は[フォース設定メニュー]の「書込み」のフ
ァンクションキーNo.を押下します。枠が消え、フォースされた命令でモニタがで
きるようになります。
・オフラインでツールだけに書き込む場合は「保存」を選択します。
・一度に 80 ステップまでのフォースまたは解除の「書込み」「保存」が可能です。

第 8 章 制御プログラムのモニタ
6E8C4890 472
■コントローラ内のフォース状態の表示
1) メニュー<モニタ><接点・コイルフォース一覧>をクリックします。
・ コントローラ内のセミグラフィック/フルグラフィック各々のフォース状態を表示
します。
・ 画面上に、セミグラフィック/フルグラフィックを含めたフォース有無のメッセー
ジを表示します。
フォース有り:「フォースされているデバイスがあります。」 (赤字)
フォース無し:「フォースされているデバイスはありません。」(青字)
■コントローラ内のフォースを全て解除する
1) メニュー<モニタ><接点・コイルフォース一覧>をクリックします。

8.1 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 473
2) [全て解除]ボタンをクリックします。すると[フォースを解除する]の画面が表
示されます。
3) [OK]をクリックします。
・ コントローラに対して、接点・コイルフォース一覧でフォースを解除する場合は、
コントローラの運転モードを「HALT」にしてください。
■コントローラ内のフォースを個別解除する
1) メニュー<モニタ><接点・コイルフォース一覧>をクリックします。
2) フォース解除させたい箇所をマウスでクリックします。(*が表示されます。)
3) [解除]ボタンをクリックします。すると[フォースを解除する]の画面が表示さ
れます。
4) [OK]をクリックします。
・ コントローラに対して、接点・コイルフォース一覧でフォースを解除する場合は、
コントローラの運転モードを「HALT」にしてください。
■プログラムを開く
接点・コイルフォース一覧に示されたプログラムを開くには、つぎの手順で行います。
1) 接点・コイルフォース一覧の注目する行をクリックします。
2) ボタン[開く]をクリックします。
プログラムエディタが開かれ、この行で指定された位置にカーソルが移動します。
オンライン/オフライン状態は、ジャンプ先で呼び出し状態を継続します。
■[フォース設定メニュー]の終了
・ 次のいずれかの操作で[フォース設定メニュー]を終了します。
1) [フォース設定メニュー]の「キャンセル」を選択します。
2) メニュー<ツール><接点・コイルフォースメニュー>をクリックします。
3) メニュー<ツール><命令語スワップメニュー>をクリックします。

第 8 章 制御プログラムのモニタ
6E8C4890 474
8.1.5 オンラインでスワップする
[プログラムエディタ]で、プログラムをモニタしながら、命令語や即値のスワップ
(強制入れ替え)を行う手順を説明します。
■[命令語スワップメニュー]の表示
・ メニュー<ツール><命令語スワップメニュー>をクリックします。モニタ中だけ
有効です。
■命令語をスワップする
1) スワップしたい命令語にカーソルを移動します。すると、[命令語スワップメニュー]
にスワップ可能な命令シンボルが表示されます。
2) スワップする命令シンボルのファンクションキーNo を押下します。すると、カーソ
ルのある命令が選択した命令に置き換わり、枠が表示されます。
・ スワップする命令語には、同じグループの命令語を指定します。 グループ スワップできる命令語
接点 -| |-,-|/|-
コイル -( )-,-(S)-,-(R)-,-(/)-
ゲート GATE,GATEN
■即値や変数をスワップする
1 )ロード命令にカーソルを移動すると、[命令語スワップメニュー]に現在設定され
ている即値または変数が表示されます。
2) [Shift]キーと同時に[F1]キーを押下すると、即値または変数が編集可能になりま
す。
3) 即値または変数を編集し、[Enter]キーを押下すると、カーソルのあるロード命令
の値が変更され、枠が表示されます。
・異なるデータタイプへのスワップはできません。
・即値から変数、変数から即値のスワップはできません。
・次の命令語で、即値や変数をスワップすることができます。
グループ 命令語 即値のスワップ 変数のスワップ
接点 -| |-,-|/|- - 可能
コイル -( )-,-(S)-,-(R)-,-(/)-
- 可能
ゲート GATE,GATEN - 可能
ロード LD 可能 可能
ストア/セット ST,SET - 可能

8.1 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 475
■コントローラとツールに書き込む
・ [命令語スワップメニュー]の「書込み」のファンクションキーNo を押下します。
枠が消え、スワップされた命令でモニタができるようになります。
■[命令語スワップメニュー]の終了
・次のいずれかの操作で[命令語スワップメニュー]を終了します。
1) [命令語スワップメニュー]の「キャンセル」を選択します。
2) メニュー<ツール><接点・コイルフォースメニュー>をクリックします。
3) メニュー<ツール><命令語スワップメニュー>をクリックします。
4) モニタを終了する。

第 8 章 制御プログラムのモニタ
6E8C4890 476
8.1.6 シーケンスタグを操作する
シーケンスタグと関連付けられた SFC プログラムの実行を操作する方法を説明します。
■前提条件
1) SFC プログラムにシーケンス命令が接続されており、シーケンスタグと関連付けら
れている必要があります。
(命令語の詳細については、オンラインマニュアル「命令語編 26.SFC 命令」を参
照してください。)
2) 対象コントローラは、L2PU22,L3PU21,PU821 です。
シーケンス命令
■制約事項
・ 1 つのシーケンスタグを複数のシーケンス命令に重複して割り付けないでください。
■操作パネルを表示する
操作パネルを使用して、SFC プログラムの実行を制御します。
プログラムエディタで、シーケンス命令を含むプログラムを開きます。
モニタを開始すると、操作パネルが自動的に表示されます。

8.1 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 477
操作パネルを閉じるには、操作パネル右上の[×]ボタンをクリックします。
■各部の名称と役割
操作ボタン
シーケンスモード
ステップ
1) シーケンスモード欄
現在のシーケンスモードを表示します。(M:停止、RM:停止、A:確認実行、C:
連続実行)

第 8 章 制御プログラムのモニタ
6E8C4890 478
2) ステップ欄
リスタートステップ切替可能なステップを表示します。
3) 操作ボタン
各操作を行います。マウスポインタをボタンの上に移動すると、そのボタンの名称
が表示されます。
:先頭へ戻る
:確認実行
:停止
:実行
:シングルステップ実行
:リスタートステップ切替
4) メッセージ欄
操作ボタンクリック時の異常メッセージを表示します。
■先頭へ戻る
オペレーションレベルのイニシャルステップをアクティブにするには、[先頭へ戻る]
ボタンをクリックします。
シーケンスモードが停止(M または、RM)のときに有効です。
■確認実行
確認進行待ちになると、[確認実行]ボタンが黄色点滅で表示します。
確認進行待ちを解除し、再実行するには、[確認実行]ボタンをクリックします。
■停止
シーケンスモードを M または、RM にするには、[停止]ボタンをクリックします。
シーケンスモードが M 以外のとき、シーケンスモードを M にします。[停止]ボタン
が赤色で表示します。
シーケンスモードが M のとき、シーケンスモードを RM にします。[停止]ボタンが赤
色点滅で表示します。

8.1 セミグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 479
■実行
シーケンスモードを A または、C にするには、[実行]ボタンをクリックします。
シーケンスモードが A 以外のとき、シーケンスモードを A にします。[実行]ボタンが
緑色で表示します。
シーケンスモードが A のとき、シーケンスモードを C にします。[実行]ボタンが緑色
点滅で表示します。
■シングルステップ実行
1 スキャンのみステップを実行するには、[シングルステップ実行]ボタンをクリックし
ます。
シーケンスモードが停止(M または、RM)のときに有効です。
■リスタートステップ切替
リスタートステップを切り替えるには、切り替え先のステップを選択し、[リスタート
ステップ切替]ボタンをクリックします。
ステップの選択には、次の方法があります。
1) プログラム上のステップ命令をクリックします。ステップ欄に選択したステップが
表示されます。
2) ステップ欄のリストから該当のステップを選択します。
シーケンスモードが停止(M または、RM)のときに有効です。
■ステップ状態の表示
シーケンス命令を含むプログラムをモニタした場合、ステップの状態を表す次の記号を
表示します。
記号 ステップの状態
> アクティブステップ
|| 確認進行待ち警報
! 渋滞警報または、アンサバック警報

第 8 章 制御プログラムのモニタ
6E8C4890 480
1) アクティブステップ
2) 確認進行待ち警報
3) 渋滞警報または、アンサバック警報

8.2 テキスト
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 481
8.2 テキスト
ここでは、「プログラムエディタ(テキスト)」で ST(ストラクチャードテキスト)
の制御プログラムをモニタするときの操作を説明します。
エンジニアリングツール2ではサポートしていません。
・プログラムをモニタする
・ファンクション内部をモニタする
・ファンクションブロック内部をモニタする
8.2.1 プログラムをモニタする
ST(ストラクチャードテキスト)のモニタの仕方を説明します。
■モニタの開始
・ プログラムのモニタを開始する場合は、<開始>ボタンまたは、メニュー<モニタ
><モニタ開始>を選択します。
モニタ中は、[Monitor]が点滅します。
テキストビューの左側に[モニタ値表示エリア]が表示され、代入文の出力結果のモ
ニタ値を表示します。
■モニタの停止
・ プログラムのモニタを停止する場合は、<停止>ボタンまたは、メニュー<モニタ
><モニタ停止>を選択します。

第 8 章 制御プログラムのモニタ
6E8C4890 482
8.2.2 ファンクション内部をモニタする
ユーザが作成した任意のファンクションの内部のモニタの仕方を説明します。
■呼び出し元を指定して開く
・ プログラムのモニタが開始されているときに、モニタしたいファンクションのファ
ンクション名を選択し、右クリックメニュー<ファンクション・ファンクションブ
ロック内部を開く>を選択します。
・ 指定したファンクションの内部が表示され、モニタが開始されます。
8.2.3 ファンクションブロック内部をモニタする
ユーザが作成した任意のファンクションブロックの内部のモニタの仕方を説明しま
す。
■呼び出し元を指定して開く
・ プログラムのモニタが開始されているときに、モニタしたいファンクションブロッ
クの変数名を選択し、右クリックメニュー<ファンクション・ファンクションブロ
ック内部を開く>を選択します。
・ 指定したファンクションブロックの内部が表示され、モニタが開始されます。

8.3 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 483
8.3 フルグラフィック
ここでは、「プログラムエディタ(フルグラフィック)」で制御プログラムをモニタす
るときの操作を説明します。
エンジニアリングツール2ではサポートしていません。
・プログラムをモニタする
・ファンクション内部をモニタする
・ファンクションブロック内部をモニタする
・オンラインでフォースをかける
・オンラインでスワップする
・シーケンスタグを操作する
8.3.1 プログラムをモニタする
LD(ラダー・ダイヤグラム)/FBD(ファンクション・ブロック・ダイヤグラム)/SFC
(シーケンシャル・ファンクション・チャート)のモニタの仕方を説明します。
■モニタの開始
・ プログラムのモニタを開始する場合は、メインビューにカーソルがある状態で、画
面上の<開始>ボタンまたは、メニュー<モニタ><モニタ開始>を選択します。
モニタ中は、画面上の[Monitor]が点滅します。
■モニタの停止
・ プログラムのモニタを停止する場合は、画面上の<停止>ボタンまたは、メニュー
<モニタ><モニタ停止>を選択します。
●注記
・ PrgPathName に”Program Files”のようにスペースを含む場合は、DOS コマンドで区切りと見
なされることのないように、PrgPathName 全体を、ダブルコーテーションでくくります。
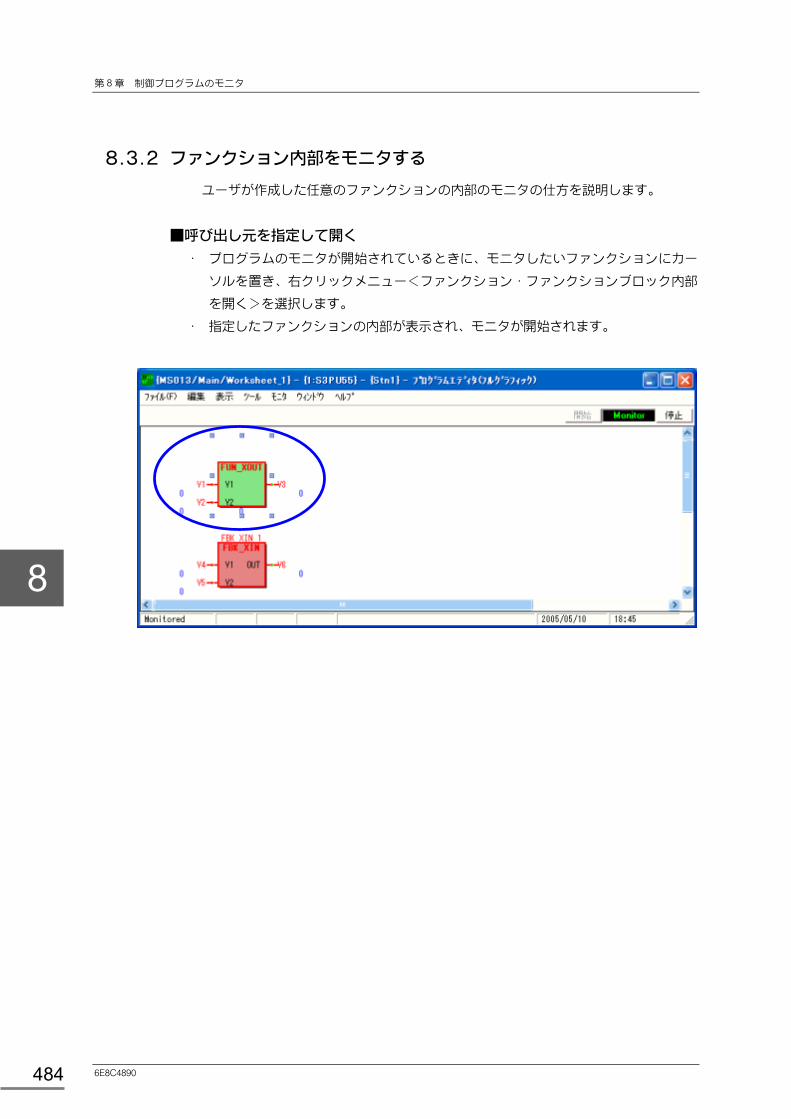
第 8 章 制御プログラムのモニタ
6E8C4890 484
8.3.2 ファンクション内部をモニタする
ユーザが作成した任意のファンクションの内部のモニタの仕方を説明します。
■呼び出し元を指定して開く
・ プログラムのモニタが開始されているときに、モニタしたいファンクションにカー
ソルを置き、右クリックメニュー<ファンクション・ファンクションブロック内部
を開く>を選択します。
・ 指定したファンクションの内部が表示され、モニタが開始されます。

8.3 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 485
8.3.3 ファンクションブロック内部をモニタする
ユーザが作成した任意のファンクションブロックの内部のモニタの仕方を説明しま
す。
■呼び出し元を指定して開く
・ プログラムのモニタが開始されているときに、モニタしたいファンクションブロッ
クにカーソルを置き、右クリックメニュー<ファンクション・ファンクションブロ
ック内部を開く>を選択します。
・ 指定したファンクションブロックの内部が表示され、モニタが開始されます。
8.3.4 オンラインでフォースをかける
[プログラムエディタ]で、プログラムをモニタしながら、コイルにフォース(出力
結果の強制保持)をかける手順を説明します。接点についても、同様の手順でフォース
(設定値の強制保持)をかけることが可能です。
■[接点・コイルフォース]の表示
・ メニュー<ツール><接点・コイルフォース>をクリックします。
■フォースをかける
1) フォースをかけたいコイルを選択すると、[接点コイルフォース]のフォーストコイ
ルの命令シンボルが選択可能になります。
2) フォーストコイルの命令シンボルを選択します。すると、カーソルのあるコイルが
フォーストコイルに置き換わり、枠が表示されます。

第 8 章 制御プログラムのモニタ
6E8C4890 486
■フォースを解除する
1) フォースを解除したいフォーストコイルを選択すると、[接点・コイルフォース]の
[解除]ボタンが選択可能になります。
2) [解除]ボタンを選択します。すると、カーソルのあるフォーストコイルがコイルに
置き換わり、枠が表示されます。
3) ファイル内のすべてのフォースを解除する場合は、[全て解除]を使用します。
■コントローラとツールに書き込む/ツールだけに保存する
・ コントローラとツールに書き込む場合は[接点・コイルフォース]の[書き込み]を
選択します。枠が消え、フォースされた命令でモニタができるようになります。
・ オフラインでツールだけに書き込む場合は[ファイル保存]を選択します。
・ 一度に 80 ステップまでのフォースまたは解除の「書き込み」「ファイル保存」が可
能です。
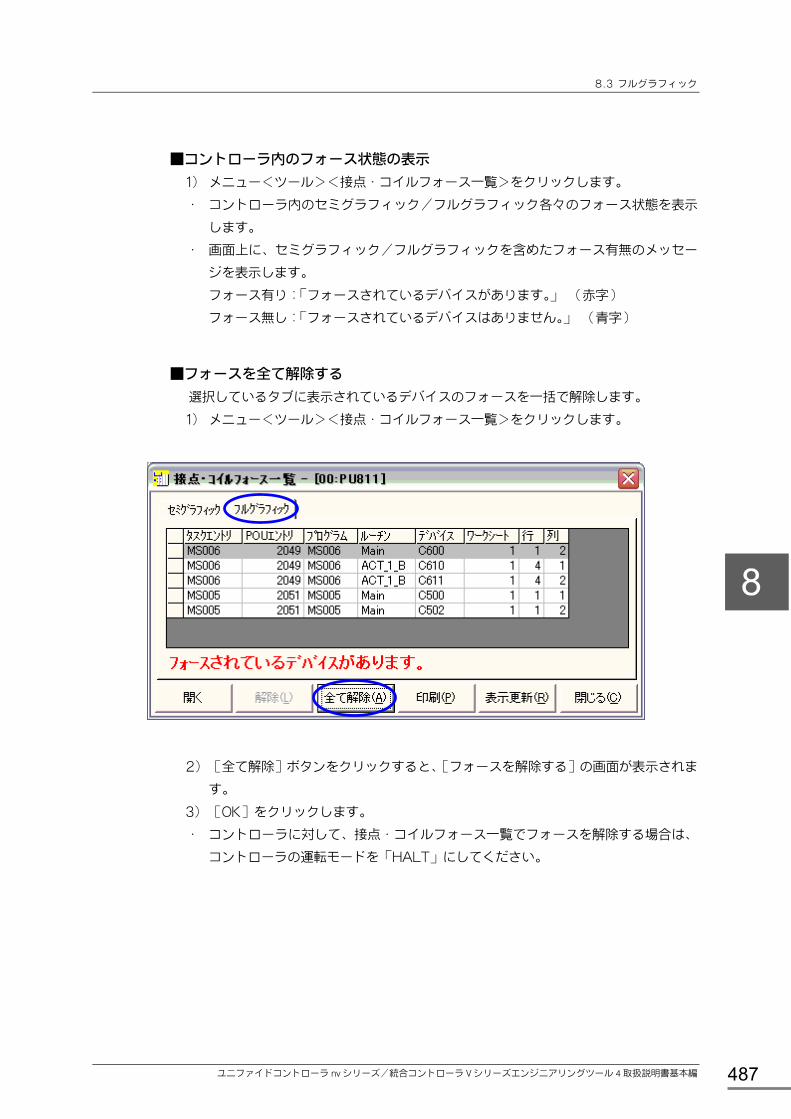
8.3 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 487
■コントローラ内のフォース状態の表示
1) メニュー<ツール><接点・コイルフォース一覧>をクリックします。
・ コントローラ内のセミグラフィック/フルグラフィック各々のフォース状態を表示
します。
・ 画面上に、セミグラフィック/フルグラフィックを含めたフォース有無のメッセー
ジを表示します。
フォース有り:「フォースされているデバイスがあります。」 (赤字)
フォース無し:「フォースされているデバイスはありません。」 (青字)
■フォースを全て解除する
選択しているタブに表示されているデバイスのフォースを一括で解除します。
1) メニュー<ツール><接点・コイルフォース一覧>をクリックします。
2) [全て解除]ボタンをクリックすると、[フォースを解除する]の画面が表示されま
す。
3) [OK]をクリックします。
・ コントローラに対して、接点・コイルフォース一覧でフォースを解除する場合は、
コントローラの運転モードを「HALT」にしてください。

第 8 章 制御プログラムのモニタ
6E8C4890 488
■フォースを個別解除する
1) メニュー<モニタ><接点・コイルフォース一覧>をクリックします。
2) フォース解除させたい箇所をマウスでクリックします。(*が表示されます。)
3) [解除]ボタンをクリックします。すると[フォースを解除する]の画面が表示さ
れます。
4) [OK]をクリックします。
・ コントローラに対して、接点・コイルフォース一覧でフォースを解除する場合は、
コントローラの運転モードを「HALT」にしてください。
■プログラムを開く
接点・コイルフォース一覧に示されたプログラムを開くには、つぎの手順で行います。
1) 接点・コイルフォース一覧の注目する行をクリックします。
2) ボタン[開く]をクリックします。
プログラムエディタが開かれ、この行で指定された位置にカーソルが移動します。
オンライン/オフライン状態は、ジャンプ先で呼び出し状態を継続します。

8.3 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 489
8.3.5 オンラインでスワップする
[プログラムエディタ]で、プログラムをモニタしながら、命令語や即値のスワップ(強
制入れ替え)を行う手順を説明します。
■[命令語スワップ]の表示
メニュー<ツール><命令語スワップ>をクリックします。モニタ中だけ有効です。
■命令語をスワップする
1) スワップしたい命令語を選択します。すると、[命令語スワップ]のスワップ可能な
命令シンボルが選択可能になります。
2) スワップする命令シンボルを選択します。すると、カーソルのある命令が選択した
命令に置き換わり、枠が表示されます。
スワップする命令語には、同じグループの命令語を指定します。
グループ スワップできる命令語
接点 -| |-,-|/|-
コイル -( )-,-(S)-,-(R)-,-(/)-
ゲート -|| ||-,-||/||-
■即値や変数をスワップする
1) 命令語にカーソルを移動すると、[命令語スワップ]に現在設定されている即値また
は変数が表示されます。
2) 即値または変数を編集し、[Enter]キーを押下すると、カーソルのある命令の値が
変更され、枠が表示されます。
・ 異なるデータタイプへのスワップはできません。
・ 即値から変数、変数から即値のスワップはできません。
・ 次の命令語で、即値や変数をスワップすることができます。
グループ 命令語 即値のスワップ 変数のスワップ
接点 -| |-,-|/|- - 可能
コイル -( )-,-(S)-,-(R)-,-(/)- - 可能
ゲート -|| ||-,-||/||- - 可能
入力変数 V1- 可能 可能
出力変数 -V2 - 可能
出力変数セット ->V2 - 可能
入出力変数 -V3- - 可能

第 8 章 制御プログラムのモニタ
6E8C4890 490
■コントローラとツールに書き込む
[命令語スワップ]の[書込み]ボタンを選択します。枠が消え、スワップされた命令
でモニタができるようになります。
■[命令語スワップ]の終了
次のいずれかの操作で[命令語スワップ]を終了します。
1) [命令語スワップ]の「キャンセル」を選択します。
2) メニュー<ツール><接点・コイルフォース>をクリックします。
3) メニュー<ツール><命令語スワップ>をクリックします。
4) モニタを終了する。

8.3 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 491
8.3.6 シーケンスタグを操作する
シーケンスタグと関連付けられた SFC プログラムの実行を操作する方法を説明しま
す。
■前提条件
1) SFC プログラムの上方にシーケンス命令が配置されており、シーケンスタグと関連
付けられている必要があります。
(命令語の詳細については、オンラインマニュアル「命令語編 26.SFC 命令」を参
照してください。)
2) 対象コントローラは、L2PU22,L3PU21,PU821 です。
シーケンス命令
■制約事項
・1 つのシーケンスタグを複数のシーケンス命令に重複して割り付けないでください。

第 8 章 制御プログラムのモニタ
6E8C4890 492
■操作パネルを表示する
操作パネルを使用して、SFC プログラムの実行を制御します。
プログラムエディタで、シーケンス命令を含むプログラムを開きます。
モニタを開始すると、操作パネルが自動的に表示されます。
操作パネルを閉じるには、操作パネル右上の[×]ボタンをクリックします。
■各部の名称と役割
操作ボタン
シーケンスモード
ステップ

8.3 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 493
1) シーケンスモード欄
現在のシーケンスモードを表示します。(M:停止、RM:停止、A:確認実行、C:
連続実行)
2) ステップ欄
リスタートステップ切替可能なステップを表示します。
3) 操作ボタン
各操作を行います。マウスポインタをボタンの上に移動すると、そのボタンの名称
が表示されます。
:先頭へ戻る
:確認実行
:停止
:実行
:シングルステップ実行
:リスタートステップ切替
4) メッセージ欄
操作ボタンクリック時の異常メッセージを表示します。
■先頭へ戻る
オペレーションレベルのイニシャルステップをアクティブにするには、[先頭へ戻る]
ボタンをクリックします。
シーケンスモードが停止(M または、RM)のときに有効です。
■確認実行
確認進行待ちになると、[確認実行]ボタンが黄色点滅で表示します。
確認進行待ちを解除し、再実行するには、[確認実行]ボタンをクリックします。
■停止
シーケンスモードを M または、RM にするには、[停止]ボタンをクリックします。
シーケンスモードが M 以外のとき、シーケンスモードを M にします。[停止]ボタン
が赤色で表示します。
シーケンスモードが M のとき、シーケンスモードを RM にします。[停止]ボタンが赤
色点滅で表示します。

第 8 章 制御プログラムのモニタ
6E8C4890 494
■実行
シーケンスモードを A または、C にするには、[実行]ボタンをクリックします。
シーケンスモードが A 以外のとき、シーケンスモードを A にします。[実行]ボタンが
緑色で表示します。
シーケンスモードが A のとき、シーケンスモードを C にします。[実行]ボタンが緑色
点滅で表示します。
■シングルステップ実行
1 スキャンのみステップを実行するには、[シングルステップ実行]ボタンをクリックし
ます。
シーケンスモードが停止(M または、RM)のときに有効です。
■リスタートステップ切替
リスタートステップを切り替えるには、切り替え先のステップを選択し、[リスタート
ステップ切替]ボタンをクリックします。
ステップの選択には、次の方法があります。
1) プログラム上のステップ命令をクリックします。ステップ欄に選択したステップが
表示されます。
2) ステップ欄のリストから該当のステップを選択します。
シーケンスモードが停止(M または、RM)のときに有効です。
■ステップ状態の表示
シーケンス命令を含むプログラムをモニタした場合、ステップの状態を表す次の記号を
表示します。
記号 ステップの状態
|| 確認進行待ち警報
! 渋滞警報または、アンサバック警報
1) 確認進行待ち警報

8.3 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 495
2) 渋滞警報または、アンサバック警報
8.3.7 モニタのモードを選択する
○補足
・ ユニファイドコントローラ nv シリーズ type1 のみ、かつ、nV-Tool4 Ver.4.5.1[3]以降で
サポートしています。
■モニタのモード
モニタのモードは、「リアルタイムモニタ」と「メモリモニタ」の 2 種類があり、プロ
グラムエディタ毎に選択できます。
メニュー アイコン モニタ表示
[リアルタイムモニタ]
従来のモニタです。
・ プログラムの実行状態をリアルタイムで表示するモニタで、プログラムのトレース
を行います。

第 8 章 制御プログラムのモニタ
6E8C4890 496
・ 同時にモニタできるプログラムの 大数は機種によって次のとおりです。
ユニファイドコントローラ nv シリーズ: 8 画面/コントローラ
統合コントローラ V シリーズの場合 : 4 画面/コントローラ
メリット ・リアルタイムに結線をパワー表示するので、実行している処理と実行していない処理の確認が一目でわかります。
デメリット ・同時にモニタできる数は少なく、制約があります。 ・ブラケットや構文などの実行条件により、処理を実行しない部分の変数の値は表示しませ
ん。
[メモリモニタ]
・ メモリ貼付方式のモニタです。
・ タスクスキャン周期とは非同期に変数の値を表示します。(結線のパワー表示は行い
ません)
・ 同時にモニタできるプログラムの 大数: 100 画面/コントローラ
メリット ・同時にモニタできる数が多いので、制約を気にせずに利用できます。 ・ブラケットや構文などの実行条件により、処理を実行しない部分の変数
についても値を表示します。
デメリット ・結線をパワー表示しませんので、実行している処理と実行していない処理の確認は、変数の値を参照して、判断する必要があります。
リアルタイムモニタは従来からのモニタですので、ここでの説明を省略します。
以降、メモリモニタについて説明します。
■メモリモニタの仕様
1) 仕様
メモリモニタでの表示が可能な画面数や変数の数です。
1 画面の 大 1PC の 大 1 コントローラの最大
画面数(ウィンドウ数) - 50 画面(*1) 100 画面(*2)
変数の数(モニタ点数) (BOOL 型変数、非 BOOL 型変数の合計)
400 点(*3) 20,000 点 40,000 点
(*1) 動作条件を満たしていない PC や Windows のアプリケーションソフトが動
作している場合、また、プログラムのステップ数や描画量が多い場合など、
条件によっては 大数よりも少なくなる場合があります。
なお、画面数とは、リアルタイムモニタ/メモリモニタの区別はなく、プロ
グラムエディタ(フルグラフィック、セミグラフィック、テキスト)の総数で
す。また、利用できる変数画面も 1 画面と数えます。
(*2) プログラムエディタの画面数です。(利用できる変数画面は数に含みません)
(*3) 画面上に表示している変数を左上から右下へ数えて 400 点です。同一変数名
は 1 つと数えます。

8.3 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 497
2) 対象変数
メモリモニタでの表示が可能な変数の種類です。
変数の種類(Variable type) ○:対象、-:非対称
ローカル変数[Tracking-type, Non-Tracking-type] ○
コントローラ・グローバル変数[User, SW,D] ○
一括入出力[IQ レジスタ] ○
直接入出力 ○
ステーション・グローバル変数 ○
コントローラ内の TC-net I/O スキャンメモリ ○
テンポラリ変数(FUN/FBK の入力引数,宣言種別:VAR_TEMP) -
間接アクセス[ポインタでアドレス指定する] -
3) メモリモニタ使用時の動作環境
[クライアント、またはスタンドアロン]
項目 条件
プロセッサ Intel Core™ 2 以上の性能を持つ CPU
必要なメモリ 推奨: 3GB 以上、 低: 2GB
[サーバ]
項目 条件
プロセッサ ・デュアルコア Intel Xeon プロセッサ以上の性能を持つ CPU ・Intel Core™ 2 以上の性能を持つ CPU
必要なメモリ 推奨: 3GB 以上、 低: 2GB
○補足
・ プログラムステップ、描画量、画面数が多い場合、2GB でも PC の動作が極端に遅くなること
があります。
■メモリモニタの操作
1) リアルタイムモニタ、メモリモニタの選択
・ プログラムエディタのメニュー<モニタ>で、<リアルタイムモニタ><メモリモ
ニタ>を選択します。
・ プログラムエディタのツールバーのアイコンで、<リアルタイムモニタ><メモリ
モニタ>を選択します。
・ メモリモニタ対応バージョンをインストール後、はじめて起動した時のデフォルト
状態は<リアルタイムモニタ>です。
・ リアルタイムモニタ/メモリモニタの選択状態は、Windows のログインユーザ毎に
保持します。
・ リアルタイムモニタ/メモリモニタの選択状態は、 後に切り替えた(操作した)状
態を保持します。
・ モニタの選択を変更したとき、既に起動している他のプログラムエディタ(操作した
プログラムエディタは除く)の選択状態は変化しません。
・ モニタモードの選択状態は、「モニタ表示」部に表示します。
リアルタイムモニタ:R-Monitor
メモリモニタ :M-Monitor

第 8 章 制御プログラムのモニタ
6E8C4890 498
2)モニタ中の表示
・ 接点、コイル、ゲート命令は、背景色(デフォルト:薄黄色)有りで表示します。
背景色の変更については、「5.4.9 さまざまな編集・表示機能」を参照してください。
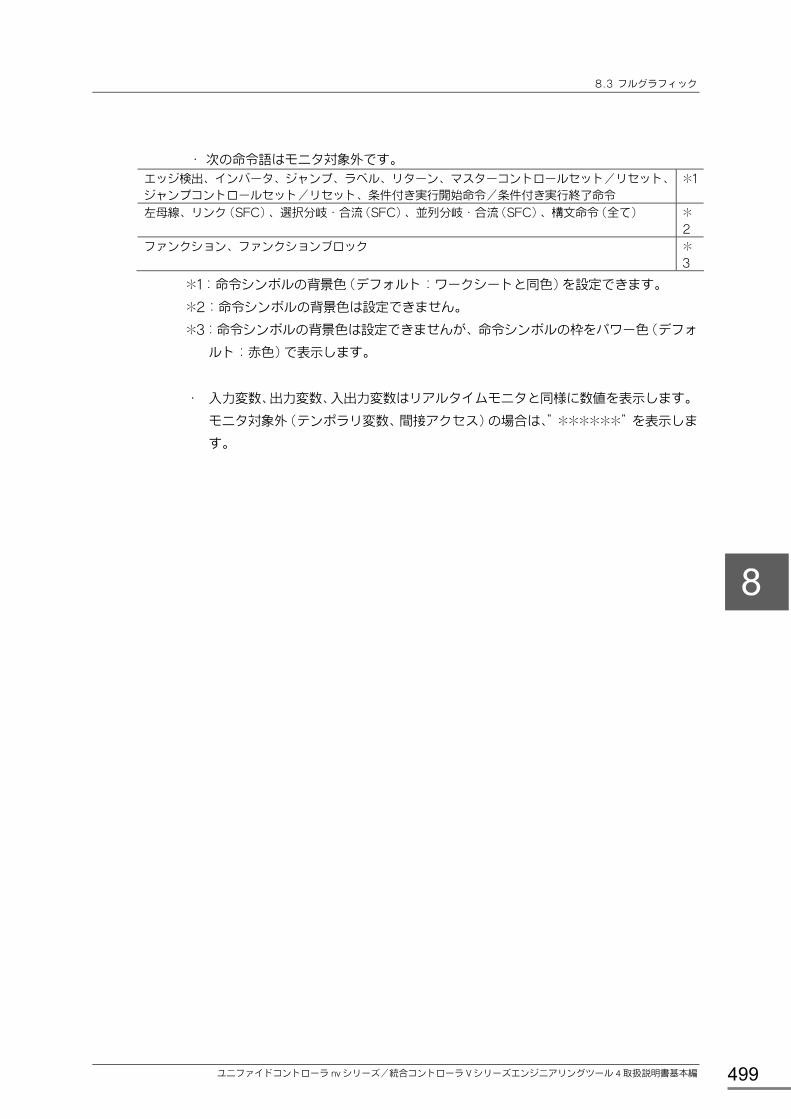
8.3 フルグラフィック
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 499
・ 次の命令語はモニタ対象外です。
エッジ検出、インバータ、ジャンプ、ラベル、リターン、マスターコントロールセット/リセット、ジャンプコントロールセット/リセット、条件付き実行開始命令/条件付き実行終了命令
*1
左母線、リンク(SFC)、選択分岐・合流(SFC)、並列分岐・合流(SFC)、構文命令(全て) *2
ファンクション、ファンクションブロック *3
*1:命令シンボルの背景色(デフォルト:ワークシートと同色)を設定できます。
*2:命令シンボルの背景色は設定できません。
*3:命令シンボルの背景色は設定できませんが、命令シンボルの枠をパワー色(デフォ
ルト:赤色)で表示します。
・ 入力変数、出力変数、入出力変数はリアルタイムモニタと同様に数値を表示します。
モニタ対象外(テンポラリ変数、間接アクセス)の場合は、”******”を表示しま
す。

第 8 章 制御プログラムのモニタ
6E8C4890 500
8.4 プログラムといっしょにデータをモニタする
プログラムをモニタしながら、プログラムの変数やグローバル変数の値をモニタする
方法を説明します。
■データ値モニタの表示
・ プログラムのモニタが開始されているときに、メニュー<モニタ><データ値モニ
タ>を選択すると、以下のダイアログが表示されます。
・ 変数名欄にモニタしたい変数名や直接表記変数を入力すると、モニタが開始されま
す。
・ 表示形式欄でデータ値の表示を任意の形式に変更できます。
・ 同時にモニタできる変数の 大数は以下のとおりです。
nv シリーズの場合:32 点
V シリーズの場合:8 点
表示内容はプログラムエディタを閉じる時に保存されます。
■変数値の書き込み
・ データ値欄に変更したい値を入力し、[値の書き込み]ボタンを押します。
■ドラッグ&ドロップによるモニタ対象変数の選択
・ プログラム上でモニタ対象の変数をドラッグしてデータ値モニタ画面にドラッグす
ると、モニタ対象として登録できます。

8.5 任意のデータをモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 501
8.5 任意のデータをモニタする
ローカル変数やグローバル変数の任意のデータをモニタする方法を説明します。
また、グローバル変数のうち、L コントローラの Tag 変数の任意のデータをモニタする
方法を説明します。
[データビュー]の起動および、操作方法は「データビューで値を設定する」の項目
を参照してください。
[Tag エデイタ]の起動および、操作方法は「Tag エデイタで値を設定する」の項目
を参照してください。
■Tag エディタを起動する
・ [プロダクトツリー]で対象のステーションを選択し、メニュー<ファイル><開く><
タグエディタ>を選択して、Tag エディタを起動します。
・ 希望する[パラメータ種別]を選択します。
・ [レコード No]を前後するか、直接入力して希望する Tag 変数を表示します。
■モニタを開始する
・ オプション[表示]で<コントローラ>、または<ツールとコントローラ>を選択します。
・ ツールバーのボタン[開始]を押せば、モニタを開始します。
■モニタを停止する
・ ツールバーのボタン[開始]を押せば、モニタを開始します。

第 8 章 制御プログラムのモニタ
6E8C4890 あ 502
8.6 複数のタスクを同時にモニタする
プログラムエディタは複数起動することができます。起動した複数のプログラムエデ
ィタに、それぞれ別のタスクをモニタさせることで、複数のタスクを同時にモニタする
ことができます。
■同時モニタでの制約
・ 同一コントローラのモニタ
1台のパーソナルコンピュータ(以下 PC)から2つ以上のコントローラを同時にモ
ニタすることはできません。
・ 大モニタ数
[統合コントローラの場合]
プログラムエディタは、1台の PC 上に 大4個まで開くことができ、それぞれが独
立してモニタすることができます。
※ PC が実装しているメモリの量や、同時に起動しているアプリケーションの有無
により、 大モニタ数が4未満となる場合が有ります。
[ユニファイドコントローラの場合]
プログラムエディタは、1台の PC 上に 大8個まで開くことができ、それぞれが独
立してモニタすることができます。
※ PC が実装しているメモリの量や、同時に起動しているアプリケーションの有無
により、 大モニタ数が8未満となる場合が有ります。
■モニタ中のユーザ一覧
○補足
・ この機能は Ver.4.2.0、Ver.3.10.0、Ver.2.14.0 以降でサポートしています。
クライアント/サーバ版では、「今、誰がモニタしているのか」「今、どのプログラムを
モニタしているのか」を知りたい場合があります。同時にプログラムをモニタできる数
には制約があるため、不要なモニタを停止したいときに有効な機能です。ここでは、そ
の表示と内容を説明します。
・ モニタ開始時、対象コントローラの同時モニタ数の制約を超えた場合に、以下のフ
ォームが自動表示されます。

8.6 複数のタスクを同時にモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 503
○補足
・ このフォームはメニューから開くことはできません。
各項目の意味は次のとおりです。
- [ログインユーザ] :V-Tool のログインユーザの中で、現在モニタ中のユーザ名。
- [PC] :[ログインユーザ]に表示しているユーザの PC 名。
- [IP アドレス] :[PC]に表示している PC が持つ IP アドレス一覧。
- [プロダクト] :[ログインユーザ]に表示しているユーザが現在モニタ中のプ
ログラム名。
(プログラムエディタのタイトルバーの表示と同一)
[プロダクト]の内容 説明
POU 名 ユーザが付けた POU の名前。
ルーチン名 フルグラフィック専用: ユーザが付けたルーチンの名前。 ただし、メインルーチンでは、「Main」と固定で表示。
ワークシート名 フルグラフィック専用: ユーザが付けたワークシートの名前。
・ ボタン[更新]をクリックすると、すべての表示内容を更新します。
○補足
・ フォーム内に表示している PC の LAN ケーブルを外したり、PC をシャットダウンした場合、
表示更新に数分の時間を要する場合があります。
・ ボタン[閉じる]をクリックすると、このフォームを閉じます。
・ RS-232C 経由で接続している可能性があるという意味で、”(RS-232C)”を表示す
ることがあります。

第 8 章 制御プログラムのモニタ
6E8C4890 504
○補足
・ ”(RS-232C)”は一度、フォームを閉じない限り、そのまま表示を継続します。
ログインユーザに”(RS-232C)”を表示する場合:
1) クライアント/サーバ構成に属さないエンジニアリングツールを RS-232C でコン
トローラへ直結してモニタしているとき。
2) [モニタ停止]を行わずにプログラムエディタを終了後、5秒以内にプログラムエ
ディタを開き、[モニタ開始]したとき。
○補足
・ 以 下 の 説 明 は 、 ユ ニ フ ァ イ ド コ ン ト ロ ー ラ nv シ リ ー ズ type1 、 か つ 、 nV-Tool4
Ver.4.5.1[3]以降の場合に該当します。
・ 1 つの画面内に、リアルタイムモニタ/メモリモニタの両方の情報を表示します。
・ リアルタイムモニタ/メモリモニタのどちらかが 大数を超えたときに表示します。
よって、片方は 大数に到達していない場合でも、現在状態として表示します。

8.6 複数のタスクを同時にモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 505

第 8 章 制御プログラムのモニタ
6E8C4890 あ 506
8.7 プログラムモニタを外部から起動する
ここでは、V-Tool 以外のユーザアプリケーションがプログラムモニタを起動する方
法を説明します。
これを適用すれば、例えば HMI、SCADA システムのプロセスグラフィックで表示さ
れた機器をクリックすると、その機器に関するインタロックシーケンスプログラムを、
オンラインモニタ状態で表示することができます。
■ 前提条件と方式
1) ユーザアプリケーションは、V-Tool と同じ PC(パーソナルコンピュータ)、同じ
プラットフォームにあるものとします。
2) その PC は、少なくともユーザアプリケーションと V-Tool が同時に動作するのに
十分なリソース(CPU,メモリ,ディスク)を持っているものとします。
3) V-Tool とユーザアプリケーションは、全く独立に構成されているので、Windows
の Shell を使って、起動コマンドを実行します。
■ プロセス機器への入出力変数名を指定して起動する場合
1) 起動パラメータ
プロセス機器への入出力変数名を指定してプログラムエディタを起動するとき、指
定するパラメータは、次の3つです。
パラメータ 意味 例
DeviceName プロセス機器への入出力変数名
M100_RUN , XV100_Open
ScopeData プロセス機器への入出力しているシステム以下の Scope
[SysID]=システム名= System1 [StnName]=ステーション名= StatI/On1 [UnitNo]=メインユニット No. = 00 [ModulesNo]=コントローラのスロット No. = 01 [TaskEntry]=タスクエントリ名 = MS [TaskEntryNo.]=タスクエントリ No. = 002 のとき ローカル変数で表示する場合 ScopeData=[SysID]\[StnName]\[UnitNo]\[ModulesNo] \[TaskEntry]\[TaskEntryNo.] コントローラ変数で表示する場合 ScopeData=[SysID]\[StnName]\[UnitNo]\[ModulesNo]ステーション変数で表示する場合 ScopeData=[SysID]\[StnName]\[UnitNo]\[ModulesNo]ネットワーク変数で表示する場合 ScopeData=[SysID]\[StnName]\[UnitNo]\[ModulesNo]
PrgPathName プログラムエディタのインストールパス
PrgPathName=“C:\Program Files\VEngTool\vHMI”

8.7 プログラムモニタを外部から起動する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 507
2) 起動コマンド
プログラムエディタを起動するときの Shell コマンド文字列は、前記起動パラメータ
を使い、下記のとおりです。
起動コマンド
{PrgPathName} /T /M {DeviceName} /C {ScopeData}
起動コマンドの実例 [スタンドアロン版] “C:\Program Files\VEngTool\vHMI” /T /M M100_RUN /C System1\StatI/On1\00\01\MS\002
起動コマンドの実例 [クライアント・サーバ版] “C:\Program Files\VEngTool\vHMI” /T /M M100_RUN /C System1\StatI/On1\00\01
○補足
・ PrgPathName に”Program Files”のようにスペースを含む場合は、DOS コマンドで区切りと
見なされることのないように、PrgPathName 全体を、ダブルコーテーションで括ります。
・ 起動コマンドのオプション
オプション 意味
/T プログラムエディタのウィンドウを 前面に表示するオプション。省略可能。
/V または、/M 必須オプションです。省略不可で、いずれかを指定します。 /V :モニタなし指定 /M :モニタあり指定
/C DeviceName をプロセス機器への出力変数名として指定するオプション。省略可能。
・ パラメータやオプションの区切りには、1個の空白文字(半角スペース)を使用してく
ださい。
■ シーケンスタグのTagNoを指定して起動する場合
1) 起動パラメータ
シーケンスタグのTagNoを指定してプログラムエディタを起動するとき、指定
するパラメータは、次の3つです。
パラメータ 意味 例
Sequence TAG
シーケンスタグ No.
[Sequence TAG]=SEQ_0100
System name システム名
[System name]=System1
PrgPathName プログラムエディタのインストールパス
PrgPathName=“C:\Program Files\VEngTool\VHMISEQ”

第 8 章 制御プログラムのモニタ
6E8C4890 508
2) 起動コマンド
プログラムエディタを起動するときの Shell コマンド文字列は、前記起動パラメータ
を使い、下記のとおりです。
起動コマンド
{PrgPathName} [/T] {/M or /V} {Sequence TAG} {System name}
起動コマンドの実例 “C:\Program Files\VEngTool\VHMISEQ” /M SEQ_0100 System1
○補足
・ PrgPathName に”Program Files”のようにスペースを含む場合は、DOS コマンドで区切りと
見なされることのないように、PrgPathName 全体を、ダブルコーテーションで括ります。
・ 起動コマンドのオプション
オプション 意味
/T プログラムエディタのウィンドウを 前面に表示するオプション。省略可能。
/V または、/M
必須オプションです。省略不可で、いずれかを指定します。 /V :モニタなし指定 /M :モニタあり指定
・ パラメータやオプションの区切りには、1個の空白文字(半角スペース)を使用してく
ださい。

8.8 プログラムの空き容量を知る
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 509
8.8 プログラムの空き容量を知る
コンパイル済みのプログラムやデータファイルの使用量や、実際のコントローラ内の
プログラム空き容量を確認する方法について説明します。
■コンパイル済みのプログラムやデータの使用量を知る
1) プロダクトツリーにてステーションを選択します。
2) メニュー<ファイル><リソースレポート>を選択すれば、下図のダイアログを表
示します。
3) <モジュール名>から対象とするモジュールを選択します。
・ [データ]: コンパイル済みのデータ量を、コントローラのメモリに換算したワード
数で示しています。
[グローバル]:グローバル領域の使用量。
[ローカル]:ローカル領域の使用量。
[未使用]:未使用のデータ領域。
[合計]:全データ領域。コントローラ機種により固定です。
・ [コード]: コンパイル済みのプログラムコード量を、コントローラのメモリに換算
したステップ数で示しています。

第 8 章 制御プログラムのモニタ
6E8C4890 510
[コード]:コード領域の使用量。
[未使用]:未使用のコード領域。
[合計]:全コード領域。コントローラ機種により固定です。
・ これらの情報から、「現在、データやプログラムをどれだけ消費しているか」、また
「データやプログラムがこれからどれだけ使用できるか」を知ることができます。
もし、データやプログラムコードがそれぞれの合計値を超えていれば、[未使用]の
値は負になり、「ダウンロードができない旨」の警告が表示されます。
・ S コントローラは、全データ領域のうち、グローバルとローカル領域の境界を変え
ることができます。[グローバル設定]で希望するグローバル領域のワード数を設定
し、ボタン[設定]をクリックします。無論、コントローラの合計データ領域は固定
ですから、グローバル領域を増やせば、使用できるローカル領域は減少します。
■コントローラのプログラム空き容量の表示
1) プロダクトツリーの左下で、空き容量を表示したいコントローラモジュールを選択
し、メニュー<ファイル>
<モジュールパラメータ>を選択します。
2) [データ]タブを選択すると、コントローラが実際に動いている動作状況が表示さ
れます。

8.8 プログラムの空き容量を知る
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 511
・ プログラム空き容量は、[コードメモリ全ステップサイズ]、[コードメモリ残りステップサイズ]、[コードメモ
リ使用ステップサイズ]をステップ数で表示します。
・ コントローラの変数空き容量は、[データメモリ全ワードサイズ]、[データメモリ残りワードサイズ]、[デ
ータメモリ使用ワードサイズ]をワード数で表示します。
■デフラグ
コントローラに対し、プログラムのダウンロードとプログラムの削除を繰り返し実行す
ると、プログラム空き容量よりも小さいサイズのプログラムをダウンロードできなくな
る場合があります。
これは、コントローラ内のメモリにプログラムがばらばらに配置され、プログラムのダ
ウンロードに必要な連続したメモリ領域を確保できないためです。
この場合、コントローラに対して<デフラグ>の操作を行い、プログラムの配置を整え
ます。詳細は<システムのモニタと保守><さまざまなメンテナンス機能><デフラグ
>の項目を参照してください。

第 8 章 制御プログラムのモニタ
6E8C4890 512
8.9 プログラムやデータを比較する
V-Tool で作成されたプログラムや各種データはコントローラにダウンロードして実
行しますが、ツール内にある各種データと実際のコントローラにあるデータを比較して、
不一致個所を特定したい場合があります。ここではその比較操作手順と比較判定結果の
見方を説明します。
■比較対象
比較対象は以下のとおりです。
・Ver2 ツールデータと Ver2 ツールデータ
・Ver2 ツールデータとコントローラデータ
・Ver2 ツールデータと Ver1 ツールデータ
・Ver3 ツールデータと Ver3 ツールデータ
・Ver3 ツールデータとコントローラデータ
・Ver4 ツールデータと Ver4 ツールデータ
・Ver4 ツールデータとコントローラデータ
■操作手順
[ツールデータとツールデータ],[ツールデータとコントローラデータ]の比較
1) [プロダクトツリー]で、比較したいデータを含むステーションを選択後、メニュー
<ファイル><コンペア>を実行します。
2) 表示された[プロダクトを比較する]ダイアログで、比較元又は比較先としたいコン
トローラをプルダウンリストから選択します。
3) 比較したいデータがある場所(「ツールデータ」、「コントローラデータ」)をラジオ
ボタンで選択します。
※ 実機コントローラ同士の比較は行えません。
4) グローバル変数の詳細比較を行う場合は[オプション]ボタンにて設定を行ってく
ださい。
※ ツールデータ同士の比較の場合のみ設定が有効になります。
5) [比較する]ボタンを押すと比較が開始されます。比較には時間がかかることがあり
ますが、[中止する]ボタンで止めることができます。中止した場合も、比較済みの
結果を見ることができます。
6) [閉じる]ボタンを押すと終了します。また、コントローラを変更するなど再度比較
を行いたい場合は、[戻る]ボタンを押して前のダイアログに戻り、指定を変更する
ことができます。

8.9 プログラムやデータを比較する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 513
[Ver.2 ツールデータと Ver.1 ツールデータ]の比較
1 Ver.1 との比較を行なう場合は[Ver.1 との比較]ボタンを押します。
2) 表示された[プロダクトを比較する]ダイアログで、比較元の Ver.2 のコントロー
ラをプルダウンリストから選択します。
3) [ファイル選択]ボタンを押して Ver.1 の比較対象ファイルを選択します。
4) 比較する]ボタンを押すと比較が開始されます。比較には時間がかかることがあり
ますが、[中止する]ボタンで止めることができます。中止した場合も、比較済みの
結果を見ることができます。
5) 閉じる]ボタンを押すと終了します。また、コントローラを変更するなど再度比較
を行いたい場合は、[戻る]ボタンを押して前のダイアログに戻り、指定を変更する
ことができます。
■判定結果の見方
・ 結果は、比較元に対して比較先がどの状態にあるかを次のように表示します。
比較元 比較先 結果 詳細 補足
データなし データあり 追加 - -
データあり データなし 削除 - -
データあり データあり(データ一致) 一致 - -
データあり データあり(データ不一致) 変更 実データ不一致 -
データあり データあり (データ一致、作成日時不一致)
変更 UUID 不一致 (実データ一致)
-
データあり データあり (データ不一致の可能性あり)
変更 UUID 不一致 ツールデータと コントローラデータの 比較時のみ表示
UUID:データ固有情報

第 8 章 制御プログラムのモニタ
6E8C4890 514
・ 結果の表示は、ID、ファイル名または結果を基準に並べ替えることができます。各
列のタイトルをクリックしてください。並べ替えの結果は、印刷に反映されます。
・ 結果を印刷することができます。[印刷する]ボタンを押してください。
■ファイルの内容
比較内容については下記を参照ください。
・ハードウェア設定(Vシリーズ)
比較項目名 内 容
メインユニット構成 ステーション構成
コントローラパラメータ コントローラパラメータ
PI/O カード構成 パラレル I/O カード構成
SI/O カード構成 シリアル I/O カード構成
I/O コネクションテーブル I/O コネクションテーブル
I/O コネクション管理 I/O コネクション管理、I/O 割り込み情報
S20パラメータ S20 パラメータ情報
SI/O パラメータ シリアル I/O パラメータ情報
SIFパラメータ SIF パラメータ情報
トラッキングテーブル 二重化トラッキング情報
FL-netパラメータ FL-net 設定情報
シリアル I/O コネクション管理 シリアル I/O コネクション管理
シリアル I/O コネクションテーブル シリアル I/O コネクションテーブル
シリアル I/O コネクションテーブル(メモリ参照型)
シリアル I/O コネクションテーブル(メモリ参照型)
PI/O 割込みテーブル I/O 割り込み情報(DS 接続用)
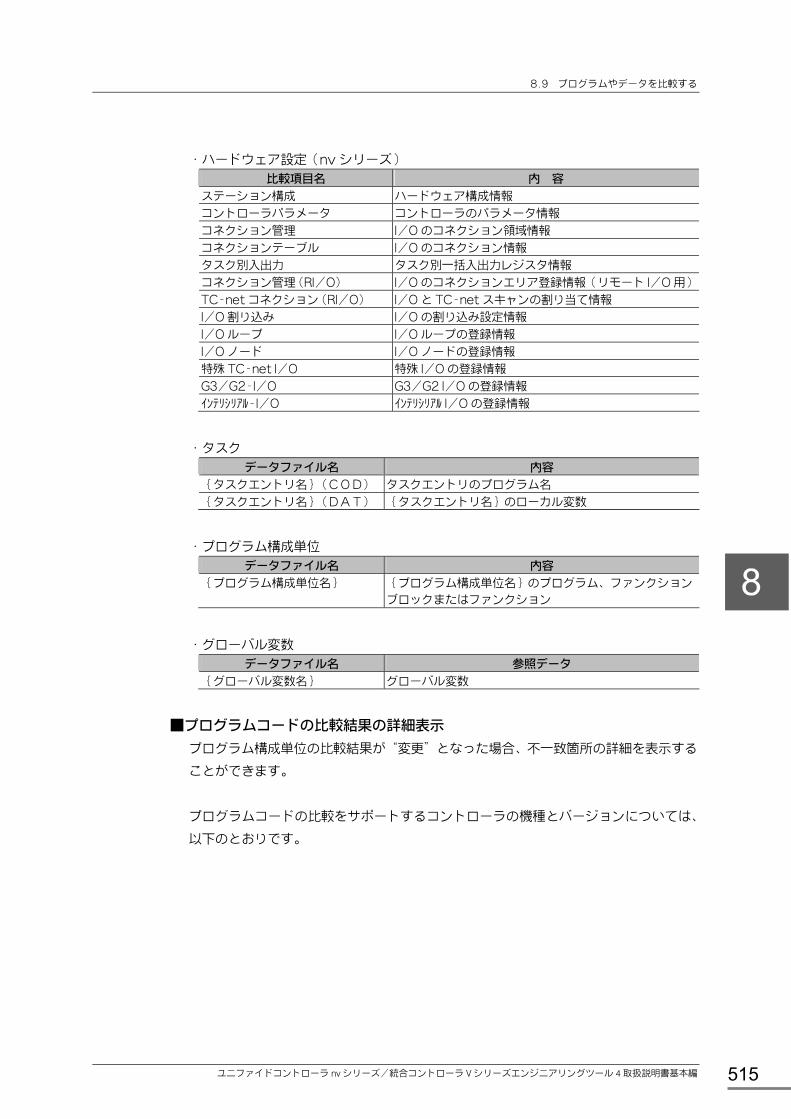
8.9 プログラムやデータを比較する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 515
・ハードウェア設定(nv シリーズ)
比較項目名 内 容
ステーション構成 ハードウェア構成情報
コントローラパラメータ コントローラのパラメータ情報
コネクション管理 I/O のコネクション領域情報
コネクションテーブル I/O のコネクション情報
タスク別入出力 タスク別一括入出力レジスタ情報
コネクション管理(RI/O) I/O のコネクションエリア登録情報(リモート I/O 用)
TC-net コネクション(RI/O) I/O と TC-net スキャンの割り当て情報
I/O 割り込み I/O の割り込み設定情報
I/O ループ I/O ループの登録情報
I/O ノード I/O ノードの登録情報
特殊 TC-net I/O 特殊 I/O の登録情報
G3/G2-I/O G3/G2 I/O の登録情報
インテリシリアル-I/O インテリシリアル I/O の登録情報
・タスク
データファイル名 内容
{タスクエントリ名}(COD) タスクエントリのプログラム名
{タスクエントリ名}(DAT) {タスクエントリ名}のローカル変数
・プログラム構成単位
データファイル名 内容
{プログラム構成単位名} {プログラム構成単位名}のプログラム、ファンクションブロックまたはファンクション
・グローバル変数
データファイル名 参照データ
{グローバル変数名} グローバル変数
■プログラムコードの比較結果の詳細表示
プログラム構成単位の比較結果が“変更”となった場合、不一致箇所の詳細を表示する
ことができます。
プログラムコードの比較をサポートするコントローラの機種とバージョンについては、
以下のとおりです。

第 8 章 制御プログラムのモニタ
6E8C4890 516
対象コントローラ(V シリーズ)
L3 L3DS L2 L1, LC S3 S2 R3 FN
プログラムコードの 比較 ○
(*1) ○(*2)
○(*3)
○(*4)
○(*5)
○(*6)
- -
(*1): 基本ソフトウェア V03.10 以上にてサポート
(*2): 基本ソフトウェア V03.11 以上にてサポート
(*3): 基本ソフトウェア V03.10 以上にてサポート
(*4): 基本ソフトウェア V02.46 以上にてサポート
(*5): 基本ソフトウェア V02.61 以上にてサポート
(*6): 基本ソフトウェア V02.60 以上にてサポート (但し、S2PU82 は V02.00 以
上にてサポート)
対象コントローラ(nv シリーズ)
type1 type2
プログラムコードの 比較
○ ○
1) 詳細を表示したい項目をマウス選択後に[詳細]ボタンを押すか、または全項目をま
とめて表示したい場合は[詳細一括]ボタンを押します。
なお、[詳細]ボタンを押すかわりに、項目をダブルクリックすることで詳細を表示
することもできます。

8.9 プログラムやデータを比較する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 517
2) 表示された[プログラムコードの比較結果]ダイアログの下部に、不一致箇所の詳細
が表示されます。
・ [印刷]ボタン: 結果をプリンタに印刷することができます。
・ [保存]ボタン: 結果をファイルに保存することができます。
■グローバル変数の比較結果の詳細表示
グローバル変数の比較結果にて、“変数詳細”が“不一致”となった場合、不一致箇所
の詳細を表示することができます。
1) 詳細を表示したい項目を選択後、[詳細]ボタンを押すか、または全項目をまとめて
表示したい場合は[詳細一括]ボタンを押します。
なお、[詳細]ボタンを押すかわりに、項目をダブルクリックすることで詳細を表示
することもできます。

第 8 章 制御プログラムのモニタ
6E8C4890 518
2) 表示された[グローバル変数の詳細比較結果]ダイアログの下部に、不一致箇所の詳
細が表示されます。

8.9 プログラムやデータを比較する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 519
・ [印刷]ボタン: 結果をプリンタに印刷することができます。
・ [保存]ボタン: 結果をファイルに保存することができます。
・ 比較結果の表示内容:
表示対象によってその表示内容が異なります。その概要は以下のとおりです。
1) User, DW の場合:
・ 比較はアドレスを基準として、変数名、データ型、値の比較を行います。
・ 比較結果は2段で表示され、上段は比較元、下段は比較先の値が表示されます。
・ データ型が一致した場合のみ値の比較を行ないます。
・ データ型が変更されていた場合、データ型/値列にデータ型を表示します。この場
合、値の比較は行ないません。
例)データ型が INT から WORD に変更された場合。
Changed 100 0 OPEN0001 INT 開指定
OPEN0001 WORD 開指定
2) タグパラメータの場合:
・ 対象のタグは PV,LP,PB,TC,DB,SQ です。
・ タグのレコード単位で比較を行います。
・ タグを追加または削除した場合、タグ No.の比較結果しか表示しません。
例)タグNo.が変更され、パラメータも変更された場合。
[48] IND0020.TAG IND0020 IND2000 タグ No
IND0020.RH 0 300 計器レンジ上限値
3)パラメータの場合:
・ 対象のパラメータは R,W,T,C,P,RTT です。
・ 比較結果はアドレスを基準として変数名、値、コメントを比較します。 上段は比較
元、下段は比較先です。
例)変数名、値、コメントが変更された場合。
R_PARA[1234] SET123 1.25 設定値 ABC
SET333 1.55 設定値 ABC-1

第 8 章 制御プログラムのモニタ
6E8C4890 520
8.10 データをトレースする
データトレースはコントローラ内の指定したタスクに同期したデータを周期的、過度
的に収集し、グラフで表示する機能です。
■制約事項
・ タスクスキャン周期を50msec以下にすると、伝送負荷によってはデータが欠
落する場合があります。
タスクスキャン周期の目安は以下のとおりです。(データトレースのみを実行時)
1)イーサネット伝送で 10msec
2)RS232C 伝送で 25msec
・収集可能なデータは4つまでです。
・1つの収集データに対して1つのファンクションブロックを割り付ける必要があ
ります。
■事前準備
・予めデータ収集用のファンクションブロックをタスク内に組み込む必要があります。
・1つの収集データに対して1つのファンクションブロックを割り付ける必要があります。

8.10 データをトレースする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 521
具体的な作成方法は基本編第7章制御プログラムの作成を参照ください。
■起動と終了
・ プロダクトツリーでステーションを選択後、メニュー<ファイル><データトレー
ス>を選択します。
データトレースを終了するには、次の方法があります。
1) メニュー<ファイル><終了>を実行します。
2) タイトルバー右端の[×]をクリックします。
3) タイトルバー左端のアイコンをダブルクリックします。
■トレース準備
・ モジュール名を選択します。初期設定はスロット番号の若いモジュールです。

第 8 章 制御プログラムのモニタ
6E8C4890 522
・ タスク種別を選択します。初期設定はMSメインスキャンタスクです。
・ タスク名を選択します。
・ ペンを選択(数字の部分をクリック)してトレースパラメータ設定画面を開きます。

8.10 データをトレースする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 523
・ トレース用FB名を入力後[確定]ボタンをクリックします。
・ トレース変数名を入力後(必要であれば単位、コメント、上下限レンジを入力後)[設
定]ボタンをクリックします。
単位、コメントはユーザコメントです。上下限レンジは入力しないと上限レンジ1
00、下限レンジ0を設定します。
データ 大値、データ 小値はトレース開始~停止までの値です。
・ トレースパラメータを正常に設定すると変数名を表示し、ペンNo.を赤線で囲み、
表示する/しないの
チエックボックスがするになります。これでトレース準備完了です。
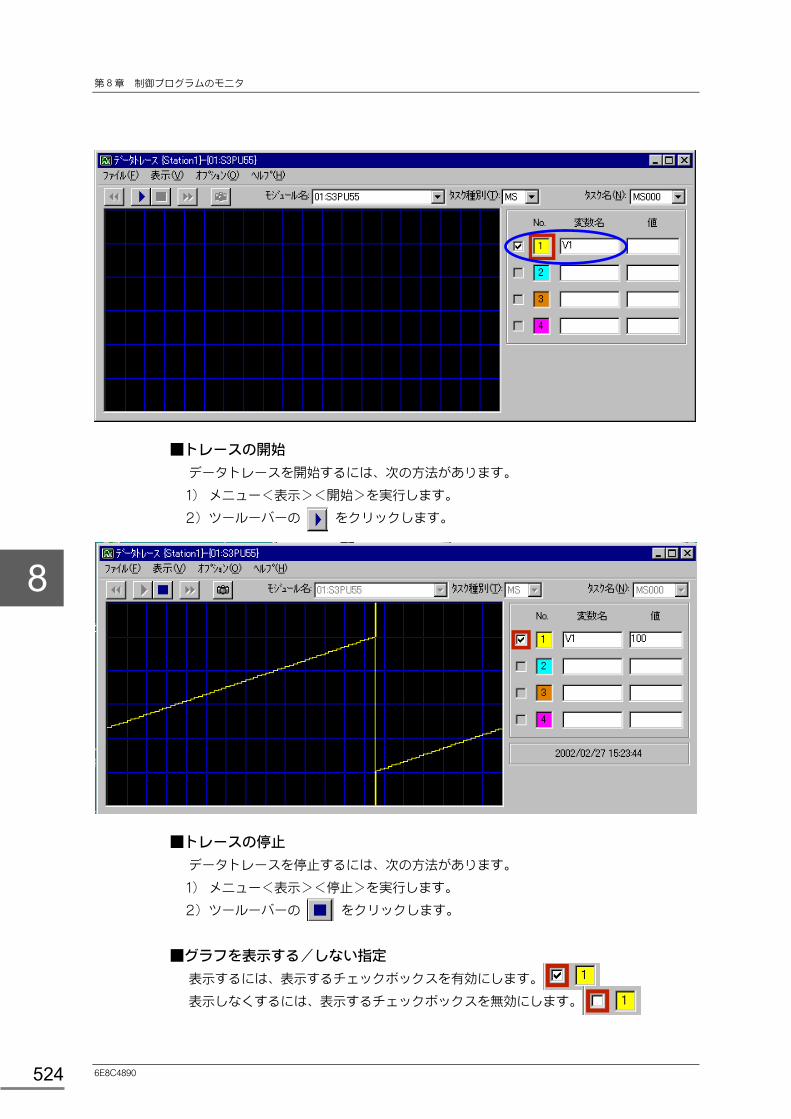
第 8 章 制御プログラムのモニタ
6E8C4890 524
■トレースの開始
データトレースを開始するには、次の方法があります。
1) メニュー<表示><開始>を実行します。
2) ツールーバーの
をクリックします。
■トレースの停止
データトレースを停止するには、次の方法があります。
1) メニュー<表示><停止>を実行します。
2) ツールーバーの をクリックします。
■グラフを表示する/しない指定
表示するには、表示するチェックボックスを有効にします。
表示しなくするには、表示するチェックボックスを無効にします。

8.10 データをトレースする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 525
■表示画面の保存
表示画面を保存するには、次の方法があります。トレース中のみ可能です。
1) メニュー<表示><キャプチャー>を実行します。
2) ツールーバーの をクリックします。
トレース開始~停止間で100個の画面を保存できます。
■戻り表示
保存した画面を戻りながら表示します。
戻り表示するには、次の方法があります。キャプチャー要求後でトレース停止中のみ可
能です。
1) メニュー<表示><戻り>を実行します。
2) ツールーバーの をクリックします。
■進む表示
保存した画面を進みながら表示します。
進む表示するには、次の方法があります。キャプチャー要求後でトレース停止中のみ可
能です。
1) メニュー<表示><進む>を実行します。
2) ツールーバーの をクリックします。
■データリードバー
データリードバーを表示するには、次の方法があります。
1) メニュー<表示><データリードバー>を実行します。
2) グラフ表示部をクリックします。

第 8 章 制御プログラムのモニタ
6E8C4890 526
■グラフ描画数
グラフ表示部の横軸の描画数です。
グラフ描画数を変更するには、メニュー<表示><グラフ描画点数>で選択します。ト
レース停止中のみ可能です。

8.11 I/O 入力点にフォースをかける
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 527
8.11 I/O 入力点にフォースをかける
オンライン時、I/O 入力点にフォース(入力結果の強制保持)をかける手順を説明し
ます。
■I/O 変数画面を表示する
1) 「プログラムエディタ」から、[利用できる変数]を開きます。
2) [I/O]を選択し、I/O 変数を開きます。
3) [ユニット]、[モジュール]にて、フォースをかけたい I/O モジュール([入出力]
が[一括入力]のモジュール)を選択します。
4) [値]を[コントローラ]にすると、[フォース]にフォース状態が表示されます。
フォース状態の意味は下記のとおりです。
・Yes:該当ワードのすべてのビットがフォースあり
・No:該当ワードのすべてのビットがフォースなし
・一部:該当ワードのいずれかのビットがフォースあり
[ステーション]、[ネットワーク]についても、同様の操作です。
■フォースをかける
1) フォースをかけたい入力点の[フォース]を[Yes]に設定します。
2) [Enter]キーを押して確定します。このとき、コントローラに書き込まれます。

第 8 章 制御プログラムのモニタ
6E8C4890 528
■フォースを解除する
1) フォースを解除したい入力点の[フォース]を[No]に設定します。
2) [Enter]キーを押して確定します。このとき、コントローラに書き込まれます。
■I/O 入力点に値を設定する
1) フォースをかけた入力点の[値]をマウスでクリックします。
2) [値]を入力し、[Enter]キーを押します。このとき、コントローラに書き込まれ
ます。
■入力フォース一覧を表示する
1) 利用できる変数の[I/O]、[ステーション]、[ネットワーク]にて、[入力フォー
ス一覧]を実行します。
■入力フォースを一括解除する
[一括解除]を選択します。確認ダイアログが表示されますので、[はい]を選択します。
529
第 9 章 nv シリーズのシステムのモニタと保守 コントローラのソフトウェア、ハードウェア状態の監視、保守について説明します。
9.1 コントローラ内のプログラム登録を確認する ····························530
9.2 コントローラ内のパラメータを確認する ···································533
9.3 コントローラの状態をモニタする ··············································535
9.4 I/O ループの状態をモニタする ·················································538
9.5 I/O モジュールの状態をモニタする··········································547
9.6 メインモジュールのログを取得する···········································551
9.7 I/O モジュールのログを取得する ·············································554
9.8 LAN の管理情報をモニタする····················································556
9.9 さまざまなメンテナンス機能······················································560
9.9.1 時刻設定·········································································560
9.9.2 運転状態の切り替え·······················································561
9.9.3 2重化の切り替え ··························································563
9.9.4 受信系の切り替え ··························································564
9.9.5 メモリクリア··································································565
9.9.6 デフラグ·········································································566
9.9.7 バックアップ/リストア ···············································567
9.10 RAS 画面を外部から起動する ····················································568

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890
530
9.1 コントローラ内のプログラム登録を確認する
ここでは、コントローラ内のプログラムの登録状態を確認する方法について説明します。
■制約事項
現状[POU エントリ]でプログラムの削除が受け付けられない時があります。
その時はプログラム名の列にカーソルを合わせた後、再度実行してください。
また、複数行の削除が出来ません。
POU エントリを削除した時は、該当のタスクエントリも削除してください。
■プログラムの登録状態を確認する
[プロダクトツリー]でコントローラを選択後、右側のタスク種別をダブルクリックし
ます。

9.1 コントローラ内のプログラム登録を確認する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 531
該当のタスク種別の[タスクエントリ]が表示されます。
表示オプションの“値”で<コントローラ>を選択するとコントローラよりタスクの登
録情報を読み出し表示します。
・ ダウンロード日付欄の表示
ダウンロードを実施した PC の時計を参照します。
[プロダクトツリー]でコントローラを選択後、メニュー<ファイル><POUエント
リ>を実行すると[POUエントリ]が表示されます。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 532
表示オプションの“値”で<コントローラ>を選択するとコントローラよりプログラム
の登録情報を読み出し表示します。
フィールド“一致”は、コントローラとツールの POU を比較して、その一致状況を表
示します。 “Yes”は一致、“No”は不一致、“-”は不一致(POU がコントローラに
のみ存在する)を表わします。
■プログラムの登録を削除する
削除したいプログラムの行にカーソルを合わせた後(青色に反転します)、[Delete]キ
ーを押します。
確認のダイアログが表示されるので[OK]を選択します。
表示オプションの“値”がツールを選択時にはツールの登録を削除し、コントローラを
選択時にはコントローラの登録を削除します。

9.2 コントローラ内のパラメータを確認する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 533
9.2 コントローラ内のパラメータを確認する
ここでは、コントローラ内の運転パラメータを確認する方法について説明します。
■コントローラのパラメータを表示する
プロダクトツリーでコントローラモジュールを選択して、<ファイル>メニューの<モジュ
ールパラメータ>を選択します。
「表示」のツールとモジュールを選択してオンライン情報を表示します。
これにより、設定した値が正しくダウンロードされていることを確認します。
■コントローラの運転状態を確認する
[データ]タブを選択すると、コントローラが実際に動いている動作状況が表示されま
す。
タスクのスキャン時間やプログラムのステップサイズ、モードスイッチの状態等を表示
します。
値はモニタされ 新の状態が表示されるようになっています。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 534
■コントローラのスキャン周期をオンラインで変更する
次のパラメータは、コントローラ(type1)の運転モードが RUN の場合でも、オンラ
インで値を変更することができます。
・ 優先順 2 スキャン周期
・ 優先順 3 スキャン周期
・ 優先順 4 スキャン周期
オンラインで周期を変更する場合は、次の範囲で値を指定してください。
・ (制御周期の 大値) ≧ 設定する値 > (現在の制御周期の設定値 × 0.8)
・ 制御周期にフローティングの指定をしている場合は、オンラインで値を変更できま
せん。

9.3 コントローラの状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 535
9.3 コントローラの状態をモニタする
ここでは、コントローラのアラーム状態、動作状態をモニタする方法について説明し
ます。
■制約事項
・ システムビューでステーション状態を表示する前に、コントローラにハードウェア
構成をダウンロードしてください。
・ システムビューは、コントローラにダウンロードされたハードウェア構成をオンラ
インで読み出して、画面に表示するためです。
・ システムビューを使用する場合は、あらかじめプロダクトツリーで伝送モジュール
を登録し IP アドレスを登録してください。
■コントローラの状態をモニタする
[プロダクトツリー]で、表示対象のステーションを選択し、メニュー<ファイル><
システムビュー>を選択すると、システムビューの[ステーション状態]画面が表示さ
れます。
[ステーション状態]画面には、次のステータスが表示されます。
・コントローラのアラーム状態、運転モード、I/O ループ状態、I/O 状態。
・伝送モジュールのアラーム状態。
ステーションが二重化構成の場合、プライマリ、セカンダリの順で両方の状態を表示し
ます。
コントローラを選択(コントローラが表示されている行をクリックする)するとそのコ
ントローラに関する情報表示または、コントローラに対して操作を実施することができ
ます。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 536
[ステーション状態]の起動時には、モニタは停止しています。ツールバーのモニタコ
ントロールで、ボタン[開始]を押すと、モニタをリフレッシュ表示します。ボタン[停
止]を押すと、リフレッシュ表示は停止します。
○補足
・ Ethernet で接続しているときに、誤って Ethernet ケーブルを外してしまった場合は、シス
テムビューを終了してから Ethernet ケーブルを接続してください。
・DL-WAIT の状態では、「アラーム状態」の欄に「正常」を表示します。

9.3 コントローラの状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 537
■アラームの詳細内容を知る
コントローラにてアラームが発生している場合、詳細内容を知るには、該当のコントロ
ーラの行を選択して、メニュー<ツール><メインモジュール詳細アラーム>を選択し
ます。
アラーム状態は、重故障・軽故障、ハード/ソフトに区分して表示します。複数の異常
状態があるとそれを全て並べて表示します。
アラーム名称 内容
CPU 標準ソフト等
MEM メモリ故障、パリティエラー等
IOR I/O縮退異常
TRS 伝送関連の故障
HRD ハードウェア自己診断故障
DUL 二重化関連の故障
ハード
HUB HUB/ドライブ関連
SET 登録内容の異常
UPG ユーザープログラム、ユーザータスクに関する異常
PRG プログラム縮退異常
ソフト
SFT それ以外のソフトウェア関連の異常
さらに、アラームの詳細内容を知りたい場合は、[システムログ]により確認すること
ができます。[システムログ]に関しては、「メインモジュールのログを取得する」をご
覧ください。
また、システム全体のアラーム発生状況を知りたい場合は、[システム状態]画面によ
り確認できます。[システム状態]画面を表示するときは、あらかじめ伝送パラメータ
の設定で「Ethernet」を選択してください。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 538
9.4 I/O ループの状態をモニタする
ここでは、I/O ループのアラーム状態をモニタする方法について説明します。
■I/O ループの状態をモニタする
システムビューの[ステーション状態]画面において、[I/O ループ状態]の表示エリ
アに、I/O ループの代表アラーム状態が表示されます。
■アラームの詳細内容を知る
I/O ループのアラームの詳細内容を知るには、該当のコントローラを選択して、[I/O
ループ詳細]ボタンを選択します。または、[I/O ループ状態]欄をダブルクリックし
ます。
・ I/O ループ接続情報を登録していない場合、[I/O ループ詳細アラーム]画面を表
示します。

9.4 I/O ループの状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 539
以下のアラーム状態を表示します。
アラーム状態 内 容
正常 ループが正常に接続されています。
バス状態 ループが切断され、バス状態です。
接続相手なし 接続相手の I/O ノードが存在しません。
I/O ノードの接続状態を知るには、[I/O ループ詳細アラーム]画面で、該当ループの
アラーム状態欄をダブルクリックします。
I/O ループの LP2 から LP1 および、LP1 から LP2 への I/O ノードの接続状態を表示
します。
接続先の I/O ノードが無い場合は、‘×’を表示します。
・ I/O ループ接続情報を、グラフィック形式で登録した場合、[I/O ループ接続状態]
のグラフィック画面を表示します。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 540
[状態の表示]
1) ノード接続状態
コネクタ No.のエリアを以下の色で表示します。
状態 色
正常 緑
接続不一致 または 片側断線 黄
接続相手なし または 両側断線 赤
2) ノード間の接続状態
ノード間の結線を以下の色で表示します。
但し、コネクタ No.エリアの色がお互いに異なる場合は、表示優先順(下記表を参
照)で表示します。
例)[赤]―――[黄]:結線=赤色
[緑]―――[黄]:結線=黄色

9.4 I/O ループの状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 541
状態 色 表示優先順
正常 緑 3
接続不一致 または 片側断線 黄 2
接続相手なし または 両側断線 赤 1
3) ノードのアラーム状態
ノード No.エリアを以下の色で表示します。
SA911/SA912 は自分のアラームと配下の I/O のアラームを、表示優先順(下記表
を参照)の色で表示します。
状態 色 表示優先順
正常 緑 3
軽故障 黄 2
重故障 赤 1
4) アラーム状態
全てのノードと接続状態の代表アラームを、表示優先順(下記表を参照)で表示し
ます。
状態 色 表示優先順 条件
正常 緑 3 ノード正常でノード間の接続状態正常
軽故障 黄 2 ノード軽故障または、片側断線、接続不一致発生
重故障 赤 1 ノード重故障または、両側断線発生
[ズーム]
ズームの倍率は 20%~200%の選択方式で、は 20%刻みで選択できます。
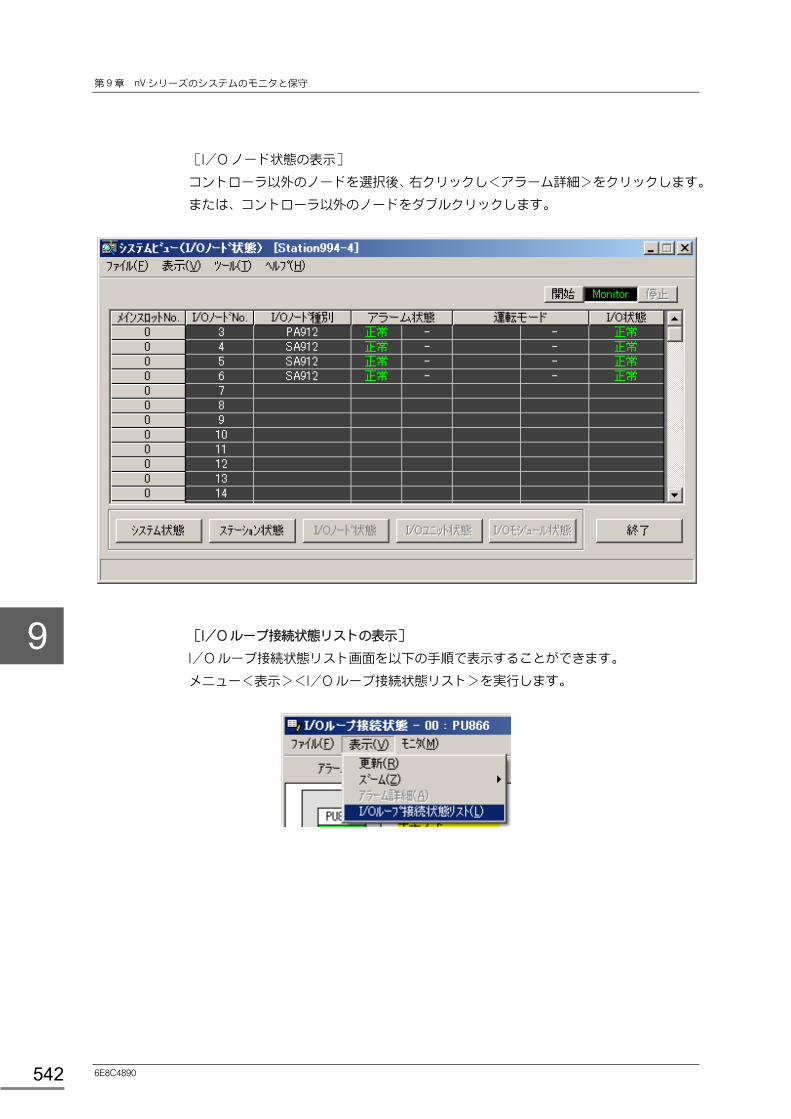
第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 542
[I/O ノード状態の表示]
コントローラ以外のノードを選択後、右クリックし<アラーム詳細>をクリックします。
または、コントローラ以外のノードをダブルクリックします。
[I/O ループ接続状態リストの表示]
I/O ループ接続状態リスト画面を以下の手順で表示することができます。
メニュー<表示><I/O ループ接続状態リスト>を実行します。

9.4 I/O ループの状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 543
[ループの切り替え]
2ループ構成の場合、ループ切り替えボタンにより表示するループを選択することがで
きます。
・ I/O ループ接続情報を、リスト形式で登録した場合、[I/O ループ接続状態]のリ
スト画面を表示します。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 544
[接続状態]
接続の状態を、以下の文字と色で表示します。
状態 文字 色
正常 正常 緑
接続不一致 または 片側断線 接続不一致 黄
接続相手なし または 両側断線 接続相手なし 赤
[ループの切り替え]
2ループ構成の場合、ループ切り替えボタンにより表示するループを選択することがで
きます。
■I/O ループの稼動状態を表示する
[ステーション状態]画面でコントローラを選択し、メニュー<ツール><I/O ループ
管理情報>を選択すると、[I/O ループ管理情報]が表示されます。
[I/O ループ管理情報]には、以下の情報が表示されます。
・ノードの ID(ノード No.、モジュール名、MAC アドレス)
・ノードの計測期間(クリア時刻、経過時間)
・エラーカウンタ
また、メンテナンス操作として、以下を行うことができます。
ノードを選択してそれぞれのボタンを押します。
・カウンタのクリア
・ノード別詳細情報の表示
・インリングマップの表示

9.4 I/O ループの状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 545
■I/O ループのスキャンヘルシーを表示する
[ステーション状態]画面でコントローラを選択し、メニュー<ツール><I/O ループ
送信マップ>を選択します。
ブロックにはノードの番号が表示され、数値が緑色ならヘルシー、赤色ならアンヘルシ
ーを意味します。
また、メンテナンス操作として、以下を行うことができます。
・スキャンアンヘルシーのクリア
・重複送信しているステーションアドレスのクリア

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 546
■I/O ループのスキャンデータを表示する
[I/O ループ送信マップ]にて、任意の送信ブロックを選択して、メニュー<表示><
スキャンデータ>を選択します。または、任意の送信ブロックをダブルクリックします。
ワード単位で値を変更することができます。

9.5 I/O モジュールの状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 547
9.5 I/O モジュールの状態をモニタする
ここでは、I/O モジュールのアラーム状態のモニタについて説明します。
I/O モジュールの状態は、I/O ノード、I/O ユニット、I/O モジュールという3階
層に分けて、それぞれ[I/O ノード状態]、[I/O ユニット状態]、[I/O モジュール状
態]にて代表状態を表示します。
TC-net I/O の場合は、I/O ノード、I/O モジュールの2階層で代表状態を表示し
ます。
■I/O 状態をモニタする
システムビューの[ステーション状態]画面において、[I/O 状態]の表示エリアに、
I/O ノードおよび、I/O モジュールの代表アラーム状態が表示されます。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 548
■I/O ノードの状態をモニタする
I/O ノードの状態を表示するには、該当のコントローラを選択して、[I/O ノード状態]
ボタンを選択します。または、[I/O 状態]欄をダブルクリックします。
I/O ノード単位で、I/O ノードおよび、I/O モジュールの代表アラーム状態が表示さ
れます。
I/O ノードの詳細アラームを表示する場合は、メニュー<表示><I/O ノード詳細ア
ラーム>を選択します。または、[アラーム状態]欄をダブルクリックします。
I/O ノードのシステムログを表示する場合は、メニュー<表示><システムログ>を選
択します。
I/O ノードおよび、I/O モジュールのバージョンを表示する場合は、メニュー<表示
><バージョン>を選択します。
I/O ノードの二重化状態を切り替える場合は、メニュー<ツール><二重化切替>を選
択します。
■I/O モジュールの縮退詳細をモニタする
[I/O 縮退詳細]画面を表示するには、[I/O ノード状態]画面で該当の I/O ノード
を選択し、メニュー<表示><I/O 縮退詳細>を選択します。
一行が 1 ユニットを意味し、I/O 未登録は「-」、緑の「*」は正常を意味し、赤の数
字は縮退している I/O のスロット番号を意味します。

9.5 I/O モジュールの状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 549
■I/O モジュールの状態をモニタする
I/O モジュールの状態を表示するには、[I/O ノード状態]画面で該当の I/O ノード
を選択し、[I/O モジュール状態]ボタンを押します。または、[I/O 状態]欄をダブ
ルクリックします。
ユニットに実装されている I/O モジュールのアラーム状態を表示します。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 550
■アラームの詳細内容を知る
I/O モジュールにてアラームが発生している場合、詳細内容を知るには、該当の I/O
モジュールの行を選択して、メニュー<表示><I/O モジュール詳細アラーム>を選択
します。
I/O モジュール毎の固有アラーム内容については、I/O モジュールの取扱説明書を参
照してください。

9.6 メインモジュールのログを取得する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 551
9.6 メインモジュールのログを取得する
ここでは、システムログについて説明します。システムログは、コントローラの内部
に保存している動作履歴です。コントローラの種類ごとに保存する内容が異なります。
該当モジュール ログ名称
ログ内容 PU811
PU866PU821 PU871
EN8 TN8
エラーログ ハードウェア、ソフトウェア上の異常検出記録。ソフトウェアにはシステム標準プログラムとアプリケーションプログラムを含みます。
○ ○ ○ ○
イベントログ 起動、切替えなどのモジュールの動作状態の変化に関する記録
○ ○ ○ ○
伝送ログ 伝送上での異常検出の記録。 イーサーネットなど、ネットワーク関係の情報を含みます。
○ ○ ○ ○
介入ログ プロセス制御に関する OIS からの操作介入の記録。
- ○ - -
■システムログを取得する
[システムビュー]を開き、ログを取得するモジュールを選択し、メニュー<ツール>
<システムログ>を実行すると[システムログ]が表示されます。また、[システムロ
グを開く]ボタンからも起動されます。
[システムログ]には、指定コントローラのシステムログ情報が日付順に表示されます。
デフォルトの設定では、エラーログ、イベントログ、伝送ログ、介入ログのすべての情
報を表示します。
この中から一部だけを選択して表示することもできます。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 552
■詳細内容を知る
さらに、ログの詳細内容を知りたい場合は、[ログの詳細]により確認することができ
ます。ログの表示上でダブルクリックするか、ログを選択した状態でメニュー<表示>
<詳細>を選択すると[ログの詳細]が表示されます。
ログの詳細表示では、原因、対策も表示します。また、[ログの詳細]を表示したままで他のログ
の内容を見るためには右上の上下のボタンを押してその前後のログに移動することができます。
■システムログ情報をファイルに保存する
画面内に表示されているシステムログ情報は、ファイルに保存することができます。保
存はメニュー<ファイル><ファイルの保存>により実施することができます。
●注記
・ ファイルの拡張子は‘cab’にしてください。
■システムログ情報をファイルから表示する
[プロダクトツリー]で、ステーションを選択後、メニュー<ファイル><システムロ
グ>を実行するとシステムログが表示されます。
メニュー<ファイル><ファイルを開く>にて、ファイル(*.cab)に保存してあるシ
ステムログを読み出して画面に表示できます。

9.6 メインモジュールのログを取得する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 553
■ログをクリアする
コントローラ内のログをクリアすることができます。メニュー<表示><ログのクリア
>を選択すると[ログのクリア]ダイアログボックスが表示されます。エラーログ、イ
ベントログ、介入ログ、伝送ログのそれぞれについてクリアするかを選択することがで
きます。全てのボックスをチェックして[OK]ボタンを押すとコントローラ内の全て
のログが一度に消去できます。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 554
9.7 I/O モジュールのログを取得する
ここでは、インテリジェント I/O のシリアル I/O ログについて説明します。(将来用)
■シリアル I/O ログを取得する
[システムビュー]で「I/O モジュール状態」画面を表示し、メニュー<表示><シリ
アル I/O ログ>を選択すると[シリアル I/O ログ]が起動されます。
[シリアル I/O ログ]は、ログの表示以外に、シリアル I/O モジュール特有の保守操
作が可能です。
起動後、ログは表示されていません。メニュー<表示><ログ表示>より下記のログ種
別を選択することにより
ログの読み出しを実施し、表示を行います。
ログ種別 内容
全情報 下記の全情報を一括で読み出します。 ステーションを選択した時だけ有効です。
コントローラ側 シリアルバス RAS 情報 シリアルバスRAS情報のうち、Lコントローラ側で管理、保存している情報を読み出します。
SBIF シリアルバス RAS 情報 シリアルバスRAS情報のうち、SBIF側で管理、保存している情報を読み出します。
SBIF I/O バスエラーカウンタ SBIFで保存している、I/Oバスのエラーカウンタを読み出します。
I/O バス エラーカウンタ I/Oバスのエラーカウンタを読み出します。
SBIF 二重化切替情報 SBIFの二重化切替履歴を読み出します。
I/O モジュールログ インテリジェントIOモジュール内部のエラーカウンタを読み出します。
I/O モジュール故障情報 インテリジェントIOモジュール内部の、自己診断結果を読み出します。
I/O バージョン&シリアル番号 インテリジェントIOモジュールのハード、ソフトバージョンとシリアル番号を読み出します。
タグ情報 インテリジェントIOモジュールのタグ情報を読み出します。

9.7 I/O モジュールのログを取得する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 555
ログの表示要求は、画面右の<ログ表示>内のドロップダウンリストからも実施するこ
とができます。
■オンライン操作を行う
シリアル I/O モジュールに対する操作は、メニュー<表示><オンライン操作>より
下記の操作項目を選択し、実施することができます。
操作項目 操作内容
コントローラ RAS 情報クリア コントローラ内に記録しているRAS情報をゼロクリアします。
SBIF,I/O RAS 情報クリア SBIF内に記録しているRAS情報をゼロクリアします。
タグ情報書き込み インテリジェントIOモジュールに、タグ情報を書き込みます。
AO 出力調整 インテリジェントIOモジュールのSAO(アナログ出力)で、アナログ出力調整を行います。
オンライン操作要求は、画面右の<オンライン操作>内のドロップダウンリストからも
選択し、実施することができます。
■シリアル I/O ログ情報をファイルに保存する
画面内に表示されているシリアル I/O ログ情報は、テキスト形式にてファイルに保存
することができます。保存はメニュー<ファイル><ファイルの保存>により実施する
ことができます。
■ファイルに保存したシリアル I/O ログ情報を表示する
メニュー<ファイル><ファイルを開く>を選択することにより、ファイルに保存して
あるシリアル I/O ログを読み出して画面に表示します。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 556
9.8 LAN の管理情報をモニタする
ここでは、LAN管理情報について説明します。
■LAN の稼動状態をモニタする(TC-net100、Ethernet)
システムビューの[ステーション状態]において、TNモジュールまたは、EN モジュ
ールを選択後、メニュー<ツール><LAN 管理情報>を選択すると[LAN 管理情報]
が表示されます。
[LAN 管理情報]には、以下の情報が表示されます。
表示項目 TN モジュール EN モジュール(*1)
ノードの ID(名称、ハードアドレス、IP アドレス、MAC アドレス)
○ ○
ノードの計測期間(クリアタイムスタンプ、経過時間) ○ -
受信系の状態 ○ -
エラーカウンタ(キャリア割れ、CRC エラー) ○ -
(*1): nv シリーズの EN モジュールのみサポート。
また、メンテナンス操作として、以下を行うことができます。
ノードを選択してそれぞれのボタンを押します。
メンテナンス操作 TN モジュール EN モジュール(*1)
受信系の切替え ○ -
カウンタのクリア ○ ○
ノード別詳細情報の表示 ○ -
MIB 情報の表示 ○ ○
インリングマップの表示 ○ -
RMON 情報の表示(シェアードハブのみ) ○ -
ポート情報の表示(シェアードハブのみ) ○ -
(*1): nv シリーズの EN モジュールのみサポート。

9.8 LAN の管理情報をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 557
■スキャンヘルシーを表示する(TC-net100)
システムビューの[ステーション状態]において、TN モジュールを選択後、メニュー
<ツール><LAN 送信マップ>を選択します。
ブロックにはノードの番号が表示され、数値が緑色ならヘルシー、赤色ならアンヘルシ
ーを意味します。
また、メンテナンス操作として、以下を行うことができます。
●スキャンアンヘルシーのクリア
●重複送信しているステーションアドレスのクリア

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 558
■スキャンデータを表示する(TC-net100)
[LAN 送信マップ]にて、任意の送信ブロックを選択して、メニュー<表示><スキ
ャンデータ>を選択します。
ワード単位で値を変更することができます。

9.8 LAN の管理情報をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 559
■LAN に参入しているノードを表示する(TC-net100)
[LAN 管理情報]にて、[インリングマップ]ボタンを押すと、LAN に参入している
ノード番号が表示されます。
また、[更新]ボタンを押すと再読出しします。
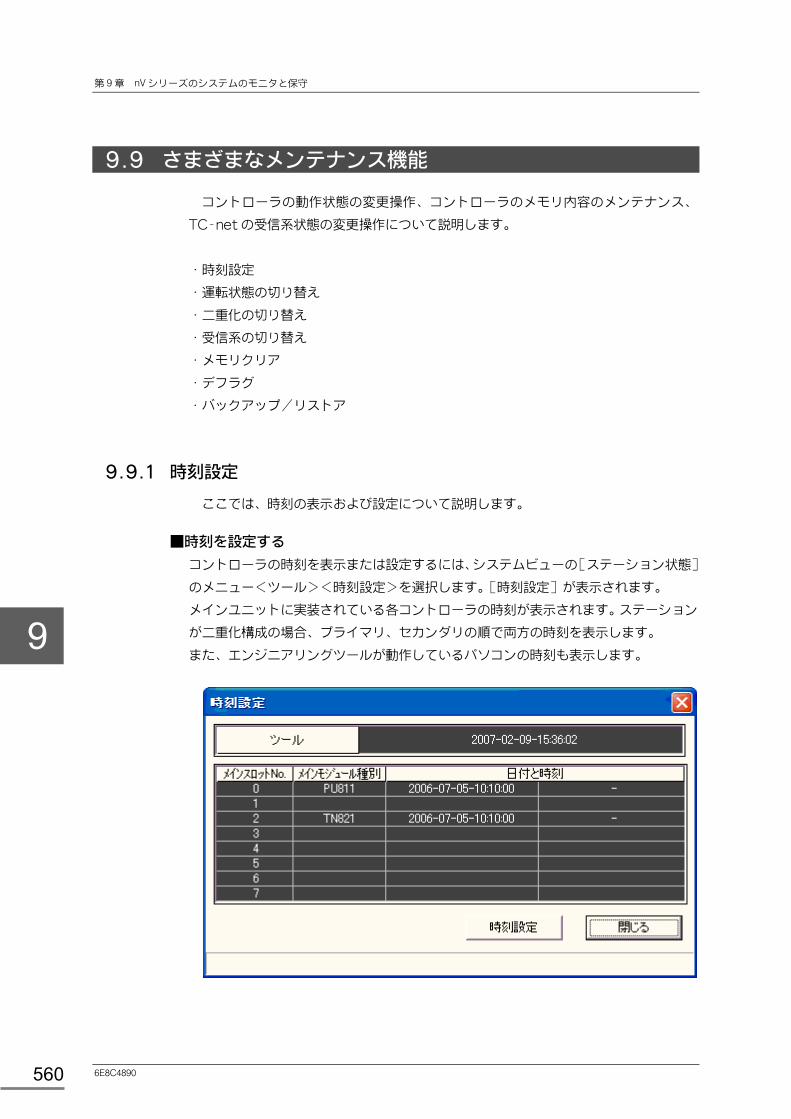
第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 560
9.9 さまざまなメンテナンス機能
コントローラの動作状態の変更操作、コントローラのメモリ内容のメンテナンス、
TC-net の受信系状態の変更操作について説明します。
・時刻設定
・運転状態の切り替え
・二重化の切り替え
・受信系の切り替え
・メモリクリア
・デフラグ
・バックアップ/リストア
9.9.1 時刻設定
ここでは、時刻の表示および設定について説明します。
■時刻を設定する
コントローラの時刻を表示または設定するには、システムビューの[ステーション状態]
のメニュー<ツール><時刻設定>を選択します。[時刻設定]が表示されます。
メインユニットに実装されている各コントローラの時刻が表示されます。ステーション
が二重化構成の場合、プライマリ、セカンダリの順で両方の時刻を表示します。
また、エンジニアリングツールが動作しているパソコンの時刻も表示します。

9.9 さまざまなメンテナンス機能
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 561
ボタン[時刻設定]を押すとエンジニアリングツールが動作しているパソコンの時刻を
コントローラに設定します。
イーサーネット経由で接続で接続している場合は、ネットワーク上の全てのコントロー
ラの時刻を変更します。
○補足
・ イーサネット経由で全ステーションの時刻を設定する場合には、以下の設定が正しく行われ
ている必要があります。
・ EN モジュールのパラメータ設定
・ ツールの<伝送パラメータ設定>
・ ツールを使用する PC の IP アドレス設定
・ 詳細は、「第7章 ダウンロード」の「7.1 コントローラと接続する」を参照してくださ
い。
・ 特に、任意の IP アドレスを指定する場合の注意点は、以下のとおりです。
・ 伝送パラメータ設定の自局設定を「シングル(フリーモード)」とする。
・ PC の IP アドレス設定のサブネットマスクと EN モジュールのサブネットマスクを一致させ
る。
9.9.2 運転状態の切り替え
ここでは、コントローラの運転状態の切り替えについて説明します。
運転状態 対象コントローラ
RUN HALT HOLD エラーリセット
PU811/PU866 ○ ○ ○(*1) ○
PU821/PU871 ○ ○ - ○ (*1): 基本ソフトウェア V01.30 以上にてサポート
●注記
・ RUN、HALT などの運転状態の内容については、それぞれのコントローラの取扱説明書をご
覧ください。
・ 運転状態の種類によっては、コントローラが制御を実行しなくなる状態があります。また、
運転状態を変更することにより制御系に影響を与える可能性があります。運転状態を変更す
るときには、制御系への影響を確認のうえで行ってください。
・ コントローラを二重化したシステムでは、運転状態を変更することによって二重化切り替え
が発生する場合があります。運転状態と二重化の動作状態の関係については、各コントロー
ラの取扱説明書をご覧ください。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 562
■運転状態を切り替える
運転状態は、システムビューの[ステーション状態]において確認することができます。
運転状態を変更したい場合は、変更するコントローラを選択後、メニュー<ツール><運
転モード設定>を選択します。
[運転モード設定]ダイアログボックスが表示されます。
運転状態を変更する場合は、[運転モード設定]ダイアログボックス内の目的のモード
のボタンを押します。
指定した運転状態の切り替え要求を実行します。
実行後、目的の運転状態に切り替わっていることを確認ください。
ダイアログを開いた時点では、[HOLD]ボタンは選択できません。
[HOLD モードを許可する。]チェックボックスを選択すると、[HOLD]ボタンが選択
できるようになります。
HOLD モードの対象でないコントローラでは、[HOLD モードを許可する。]チェック
ボックスは選択できません。
9.9 さまざまなメンテナンス機能
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 563
9.9.3 二重化の切り替え
ここでは、二重化ステーションのオンライン/スタンバイ切り替えについて説明しま
す。
■二重化ステーションのオンライン/スタンバイを切り替える
二重化状態は、システムビューの[ステーション状態]において確認することができま
す。オンライン/スタンバイ状態を変更したい場合は、コントローラを選択後、メニュ
ー<ツール><二重化設定>を選択します。
[はい]を選択すると、オンラインステーションがスタンバイに切り替わり、スタンバ
イステーションがオンラインに切り替わります。
●注記
・ オンライン/スタンバイ状態切替えの詳細内容については、それぞれのコントローラの取扱
説明書をご覧ください。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 564
9.9.4 受信系の切り替え
ここでは、TC-net の受信系状態の切り替えについて説明します。
受信系状態には、以下の3つの状態が存在します。
●自動受信
●A 系強制受信
●B 系強制受信
■TC-net の受信系状態を切り替える
システムビューの[ステーション状態]において、TN モジュールを選択後、メニュー
<ツール><TC-net 受信系切替え>を選択します。
[TC-net 受信系切替え]ダイアログボックスが表示されます。
受信系状態が表示されます。ステーションが二重化構成の場合、プライマリ、セカンダ
リの順で両方の受信系状態を表示します。
起動時には、モニタは停止しています。ツールバーのモニタコントロールで、[開始]
ボタンを押すと、モニタをリフレッシュ表示します。[停止]ボタンを押すと、リフレ
ッシュ表示は停止します。
受信系状態を変更する場合は、目的の切替えボタンを押して受信系状態切替え要求を実
行します。
実行後、目的の受信系状態に切り替わっていることを確認ください。

9.9 さまざまなメンテナンス機能
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 565
9.9.5 メモリクリア
メモリクリアとは、コントローラのユーザー用メモリを全てゼロクリアします。コン
トローラを交換した時など、完全に初期化して再起動する場合などに使用します。
■コントローラのメモリをクリアする
システムビューの[ステーション状態]において、コントローラを選択後、メニュー<
ツール><メンテナンス>を選択します。[メンテナンスパネル]は、コントローラの
メモリを保守するための画面です。
タブ<メモリ操作>を選択し、プルダウンメニュー<操作>より[メモリクリア]を選
択します。[OK]ボタンを押すとメモリクリア要求を実行します。
メモリクリアの操作は、HALT 状態で実行可能です。
●注記
・ [メンテナンスパネル]からメモリクリアが実行できるのは、コントローラの基本プログラ
ムが正常に動作して いる場合に限られます。パリティエラーなどメモリの異常状態が復旧し
ない場合には、コントローラのスイッチによるメモリクリアが必要となる場合があります。
この場合は、コントローラの取扱説明書にしたがって強制的にメモリクリアを実行してくだ
さい。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 566
9.9.6 デフラグ
デフラグとは、コントローラのユーザー用メモリのうちアプリケーションプログラム、
ローカル変数領域を再配置し、空領域を確保します。
■コントローラのメモリをデフラグする
システムビューの[ステーション状態]において、コントローラを選択後、メニュー<
ツール><メンテナンス>を選択します。[メンテナンスパネル]は、コントローラの
メモリを保守するための画面です。
タブ<メモリ操作>を選択し、プルダウンメニュー<操作>より[デフラグ]を選択し
ます。[OK]ボタンを押すとデフラグ要求を実行します。

9.9 さまざまなメンテナンス機能
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 567
9.9.7 バックアップ/リストア
バックアップとは、コントローラのメモリ内容をツールのハードディスクに保存する
ことです。
リストアとは、ツールのハードディスクに保存してあるメモリ内容をコントローラに
書き込むことです。
■バックアップを行う
あからじめ対象コントローラを HALT 状態に切り替えておきます。
システムビューの[ステーション状態]において、対象コントローラを選択後、<メン
テナンス>ボタンを押します。<コマンド>プルダウンメニューより[バックアップ]
を選択します。[OK]ボタンを押すとバックアップ要求を実行します。バックアップ処
理中は実行経過がバーグラフで表示され、完了するとファイル保存ダイアログが表示さ
れます。
実行中に中止したい場合は[キャンセル]ボタンを押してください。
■リストアを行う
システムビューの[ステーション状態]において、対象コントローラを選択後、<メン
テナンス>ボタンを押します。
あからじめ対象コントローラを DL-WAIT 状態に切り替えておきます。
[メンテナンスパネル]の<コマンド>プルダウンメニューより[リストア]を選択し
ます。[OK]ボタンを押すとファイル選択ダイアログが表示されますので、リストアす
るファイルを選択します。
リストア処理中は実行経過がバーグラフで表示されます。
実行中に中止したい場合は[キャンセル]ボタンを押してください。
●注記
・ リストアを中止した場合、コントローラのデータが不完全な状態となりコントローラは正常
動作しなくなります。

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 568
9.10 RAS の画面を外部から起動する
ここでは、V-Tool 以外のユーザアプリケーションから、システムビューやシステム
ログの画面を外部から起動する方法を説明します。
■前提条件と方式
1) ユーザアプリケーションは、V-Tool と同じ PC(パーソナルコンピュータ)、同じ
プラットフォームにあるものとします。
2) その PC は、少なくともユーザアプリケーションと V-Tool が同時に動作するのに
十分なリソース(CPU,メモリ,デイスク)を持っているものとします。
3) V-Tool とユーザアプリケーションは、全く独立に構成されているので、Windows
の Shell を使って、起動コマンドを実行します。
■システムビューでステーション状態を表示する
・ 起動パラメータ
パラメータ 意味 例
プログラムファイル名 システムビューのプログラムファイル名(フルパス指定)
C:\Program Files \VEngTool\SysView
/T システムビューのウィンドウを 前面に表示するときに指定する。省略可能。 注意:「/T」を指定する時は、必ず「/M」を続けて指定してください
/T /M
/M 表示機能のメニューのみ有効にするときに指定する。省略可能。
/M
システム名称 表示するシステムの名称 SystemName
ステーション名称 表示するステーションの名称 StationName
・ 起動コマンド
システムビューを起動するときの Shell コマンド文字列は、前記起動パラメータを使
い、下記のとおりです。
起動コマンド
{プログラムファイル名} /T /M {システム名称}, {ステーション名称}
起動コマンドの実例 [スタンドアロン版]/[クライアント・サーバ版]共通 “C:\Program Files\VEngTool\SysView” /T /M SystemName,StationName
○補足
・ プログラムファイルのパス名が”Program Files”のようにスペースを含む場合は、DOS コマ
ンドで区切りと見なされることのないように、プログラムファイルのパス名全体を、ダブル
コーテーションで括ります。
・ コマンド起動されたシステムビューにおいて、[システムログ]ボタンは有効です。選択した
メインモジュールの[システムログ]を開くことが可能です。

9.10 RAS の画面を外部から起動する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 569
■システムビューで TC-net100 の状態を表示する
・ 起動パラメータ
パラメータ 意味 例
プログラムファイル名 システムビューのプログラムファイル名(フルパス指定)
C:\Program Files \VEngTool\SysView
/T システムビューのウィンドウを 前面に表示するときに指定する。省略可能。 注意:「/T」を指定する時は、必ず「/M」を続けて指定してください
/T /M
/M 表示機能のメニューのみ有効にするときに指定する。省略可能。
/M
システム名称 表示するシステムの名称 SystemIName
ステーション名称 表示するステーションの名称 StationName
スロット番号 TC-net100 モジュールの接続されたメインユニットのスロット番号
2
バス番号 0固定(未使用) 0
ユニット番号 0固定(未使用) 0
画面番号 表示する画面の種別を番号で指定する 0:LAN送信マップ 1:LAN管理情報
1
・ 起動コマンド
システムビューを起動するときの Shell コマンド文字列は、前記起動パラメータを使
い、下記のとおりです。
起動コマンド
{プログラムファイル名} /T /M {システム名称}, {ステーション名称}, {スロット番号}, {バス番号}, {ユニット番号}, {画面番号}
起動コマンドの実例 [スタンドアロン版]/[クライアント・サーバ版]共通 “C:\Program Files\VEngTool\SysView” /T /M SystemName,StationName, 2, 0, 0, 1

第 9 章 nV シリーズのシステムのモニタと保守
6E8C4890 570
■システムログでメインモジュールのログを表示する
・ 起動パラメータ
パラメータ 意味 例
プログラムファイル名 システムログのプログラムファイル名(フルパス指定)
C:\Program Files \VEngTool\SysLog
/T システムログのウィンドウを 前面に表示するときに指定する。省略可能。 注意:「/T」を指定する時は、必ず「/M」を続けて指定してください
/T /M
/M 表示機能のメニューのみ有効にするときに指定する。省略可能。
/M
システム名称 表示するシステムの名称 SystemName
ステーション名称 表示するステーションの名称 StationName
スロット番号 表示するモジュールのスロット番号 1
・ 起動コマンド
システムログを起動するときの Shell コマンド文字列は、前記起動パラメータを使
い、下記のとおりです。
起動コマンド
{プログラムファイル名} /T /M {システム名称}, {ステーション名称}, {スロット番号}
起動コマンドの実例 [スタンドアロン版]/[クライアント・サーバ版]共通 “C:\Program Files\VEngTool\SysLog” /T /M SystemName,StationName,1

571
第 10 章 V シリーズのシステムのモニタと保守 コントローラのソフトウェア、ハードウェア状態の監視、保守について説明します。
10.1 コントローラ内のプログラム登録を確認する··························572
10.2 コントローラ内のパラメータを確認する ·································575
10.3 コントローラの状態をモニタする ············································577
10.4 パラレル I/O 状態をモニタする··············································581
10.5 シリアル I/O 状態をモニタする··············································586
10.6 メインモジュールのログを取得する ········································592
10.7 I/O モジュールのログを取得する ···········································596
10.8 LAN の管理情報をモニタする ·················································599
10.9 さまざまなメンテナンス機能 ···················································610
10.9.1 時刻設定 ···································································· 611
10.9.2 運転状態の切り替え ··················································612
10.9.3 2重化の切り替え······················································614
10.9.4 受信系の切り替え······················································615
10.9.5 メモリクリア ·····························································616
10.9.6 デフラグ ····································································617
10.9.7 バックアップ/リストア···········································618
10.9.8 FROM 書き込み·························································619
10.9.9 FROM 読み出し·························································620
10.9.10 出力リセット解除······················································621
10.9.11 リードバック異常リセット ··············································622
10.9.12 I/O 活線着脱の設定 ·················································623
10.10 RAS 画面を外部から起動する··················································625

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 572
10.1 コントローラ内のプログラム登録を確認する
ここでは、コントローラ内のプログラムの登録状態を確認する方法について説明します。
■制約事項
現状[POU エントリ]でプログラムの削除が受け付けられない時があります。
その時はプログラム名の列にカーソルを合わせた後、再度実行してください。
また、複数行の削除ができません。
POU エントリを削除した時は、該当のタスクエントリも削除してください。
■プログラムの登録状態を確認する
[プロダクトツリー]でコントローラを選択後、右側のタスク種別をダブルクリックし
ます。

10.1 コントローラ内のプログラム登録を確認する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 573
該当のタスク種別の[タスクエントリ]が表示されます。
表示オプションの“値”で<コントローラ>を選択するとコントローラよりタスクの登
録情報を読み出し表示します。
・ ダウンロード日付欄の表示
統合コントローラの L コントローラの場合:伝送先のコントローラの時計を参照し
ます。
それ以外のコントローラの場合:ダウンロードを実施した PC の時計を参照します。
[プロダクトツリー]でコントローラを選択後、メニュー<ファイル><POUエント
リ>を実行すると[POUエントリ]が表示されます。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 574
表示オプションの“値”で<コントローラ>を選択するとコントローラよりプログラム
の登録情報を読み出し表示します。
フィールド“一致”は、コントローラとツールの POU を比較して、その一致状況を表
示します。 “Yes”は一致、“No”は不一致、“-”は不一致(POU がコントローラに
のみ存在する)を表わします。
■プログラムの登録を削除する
削除したいプログラムの行にカーソルを合わせた後(青色に反転します)、[Delete]キ
ーを押します。
確認のダイアログが表示されるので[OK]を選択します。
表示オプションの“値”がツールを選択時にはツールの登録を削除し、コントローラを
選択時にはコントローラの登録を削除します。

10.2 ココントローラ内のパラメータを確認する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 575
10.2 コントローラ内のパラメータを確認する
ここでは、S、L、FN、RI/O コントローラ内の運転パラメータを確認する方法につい
て説明します
■コントローラのパラメータを表示する
プロダクトツリーでコントローラモジュールを選択して、<ファイル>メニューの<モジュ
ールパラメータ>を選択します。
「表示」のツールとモジュールを選択してオンライン情報を表示します。
これにより、設定した値が正しくダウンロードされていることを確認します。
■コントローラの運転状態を確認する
[データ]タブを選択すると、コントローラが実際に動いている動作状況が表示されま
す。
タスクのスキャン時間やプログラムのステップサイズ、モードスイッチの状態等を表示
します。
値はモニタされ 新の状態が表示されるようになっています。
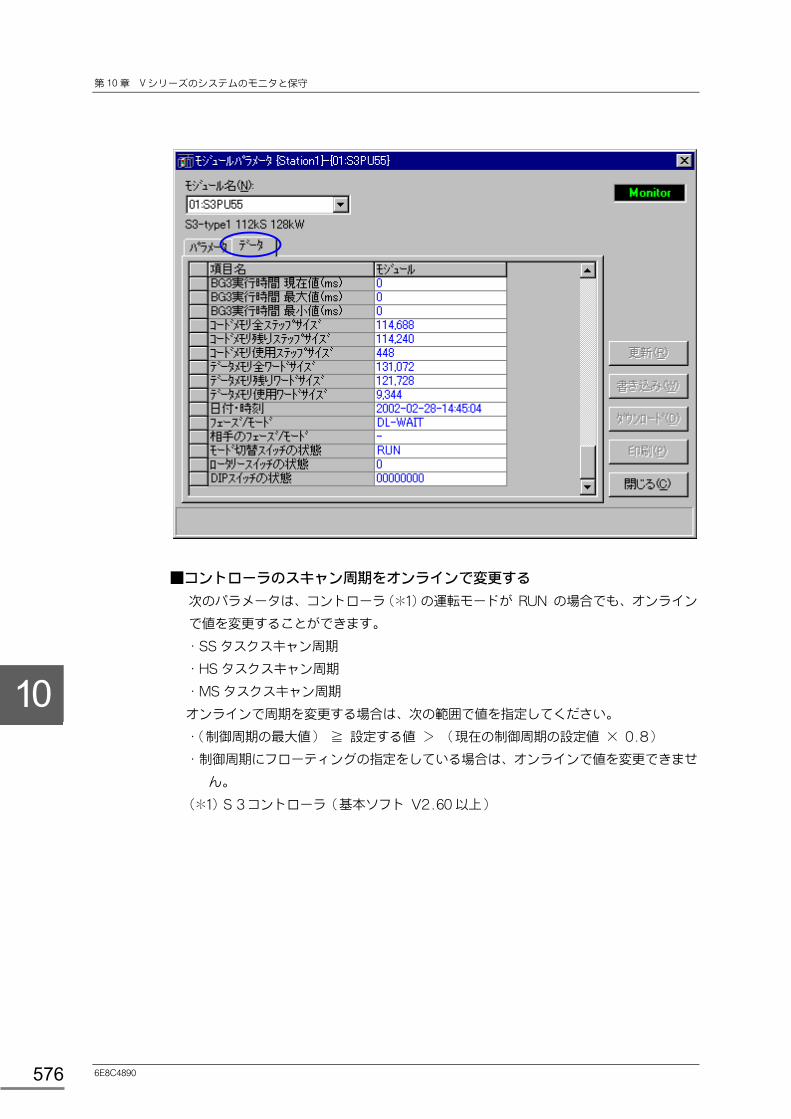
第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 576
■コントローラのスキャン周期をオンラインで変更する
次のパラメータは、コントローラ(*1)の運転モードが RUN の場合でも、オンライン
で値を変更することができます。
・SS タスクスキャン周期
・HS タスクスキャン周期
・MS タスクスキャン周期
オンラインで周期を変更する場合は、次の範囲で値を指定してください。
・(制御周期の 大値) ≧ 設定する値 > (現在の制御周期の設定値 × 0.8)
・制御周期にフローティングの指定をしている場合は、オンラインで値を変更できませ
ん。
(*1)S3コントローラ(基本ソフト V2.60 以上)

10.3 コントローラの状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 577
10.3 コントローラの状態をモニタする
ここでは、コントローラのアラーム状態、動作状態をモニタする方法について説明し
ます。
■制約事項
・ システムビューでステーション状態を表示する前に、コントローラにハードウェア
構成をダウンロードしてください。
システムビューは、コントローラにダウンロードされたハードウェア構成をオンラインで読み
出して、画面に表示するためです。
・ 次のハードウェアモジュールは、システムビューの表示上、区別することができま
せん。
モジュール名 システムビューでの表示
BU356, BU35B BU356/35B
CHS-5807, CHS-5839 CHS-5807/5839
CN611, CN612 CN611/612
CN711, CN712 CN711/712
EN611, EN631 EN611/631
EN621, EN641 EN621/641
EN711, EN731 EN711/731
EN721, EN741 EN721/741
SDI01, SDI01A SDI01/01A
TN711, TN721 TN711/721
TN712, TN722 TN712/722
S3PU45+IF721, S3PU45+IF741, S3PU45
S3PU45+IF721/741
S3ST45A+IF721, S3ST45A
S3ST45A+IF721
・ Ethernet 接続でシステムビューを使用する場合は、あらかじめプロダクトツリーで
EN または FN カードを登録し IP アドレスを登録してください。
・ FN を使用した Ethernet 接続の場合は、プロダクトツリーで左端のコントローラを登録し
てください。
・ Ethernet 接続で L3PU11 のシリアル I/O のステータスを表示することはできません。R
S-232Cにて接続してください。
・ メインユニット「BU74A」上に登録されたイーサネットカードは、「EN7**」と表示されま
す。
・ いくつかの画面でモニタ表示をしている時、新しくモニタを開始すると、メッセー
ジ「一時的なアクセス不可状態(回答準備未)」が表示されることがあります。この
場合は、既にモニタ表示している画面にてモニタを中止した後、新しくモニタを開
始してください。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 578
■コントローラの状態をモニタする
[プロダクトツリー]で、表示対象のステーションを選択し、メニュー<ファイル><システム
ビュー>を選択すると、システムビューの[ステーション状態]画面が表示されます。
[ステーション状態]画面には、次のステータスが表示されます。
・コントローラのアラーム状態、プログラム縮退状態、運転モード、二重化状態。
・ネットワークモジュールのアラーム状態。
・I/O モジュールのアラーム状態。
・シリアル I/O、パラレル I/O の代表アラーム状態。
ステーションが二重化構成の場合、プライマリ、セカンダリの順で両方の状態を表示し
ます。
コントローラを選択(コントローラが表示されている行をクリックする)するとそのコ
ントローラに関する情報表示またはコントローラに対して操作を実施することができ
ます。
[Model3000,Model2000]
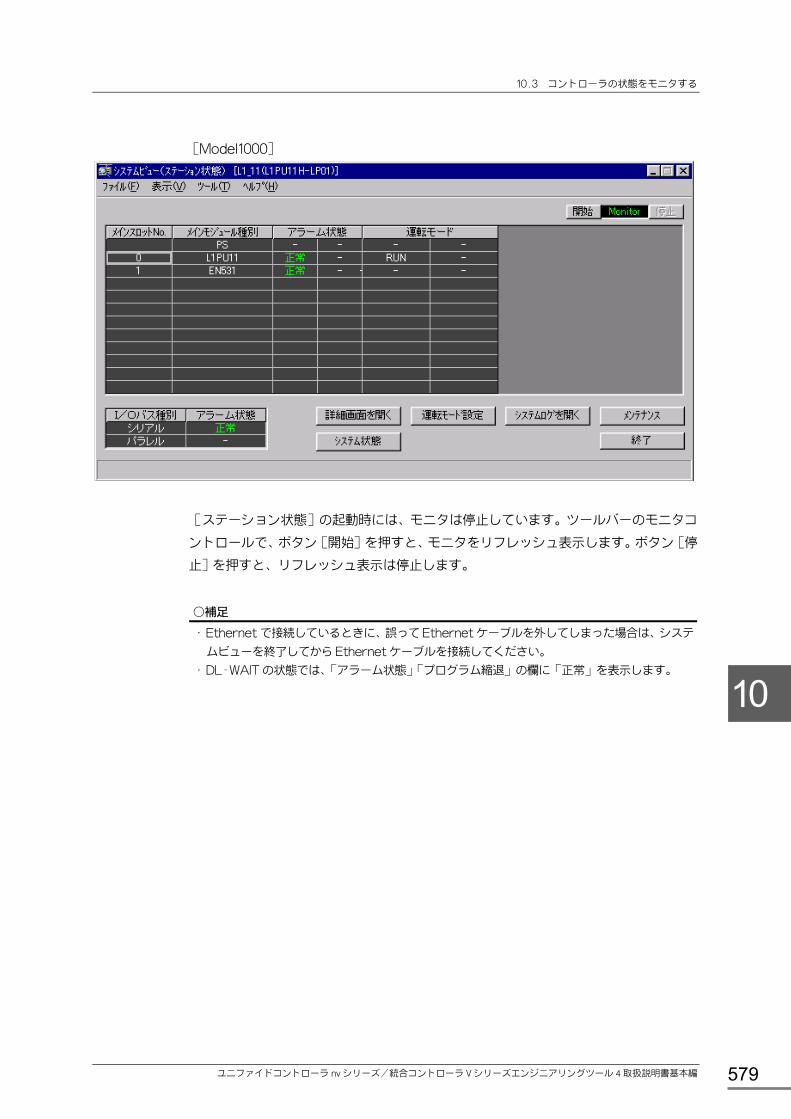
10.3 コントローラの状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 579
[Model1000]
[ステーション状態]の起動時には、モニタは停止しています。ツールバーのモニタコ
ントロールで、ボタン[開始]を押すと、モニタをリフレッシュ表示します。ボタン[停
止]を押すと、リフレッシュ表示は停止します。
○補足
・ Ethernet で接続しているときに、誤って Ethernet ケーブルを外してしまった場合は、システ
ムビューを終了してから Ethernet ケーブルを接続してください。
・ DL-WAIT の状態では、「アラーム状態」「プログラム縮退」の欄に「正常」を表示します。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 580
■アラームの詳細内容を知る
コントローラにてアラームが発生している場合、詳細内容を知るには、該当のコントロー
ラの行を選択して、メニュー<ツール><メインモジュール詳細アラーム>を選択します。
アラーム状態は、重故障・軽故障、ハード/ソフトに区分して表示します。複数の異常
状態があるとそれを全て並べて表示します。
アラーム名称 内容
CPU 標準ソフト等
MEM メモリ故障、パリティエラー等
PI/O パラレル I/O 関連の故障
SI/O シリアル I/O 関連の故障
I/OR I/O 縮退異常
DUL 二重化関連の故障
ETH イーサーネット関連の故障
TCN TC-net関連の故障
ハード
HRD ハードウェア自己診断故障
SET 登録内容の異常
UPG ユーザープログラム、ユーザータスクに関する異常
PRG プログラム縮退異常
ソフト
SFT それ以外のソフトウェア関連の異常
さらに、アラームの詳細内容を知りたい場合は、[システムログ]により確認すること
ができます。[システムログ]に関しては、「メインモジュールのログを取得する」をご
覧ください。
また、システム全体のアラーム発生状況を知りたい場合は、[システム状態]画面によ
り確認できます。[システム状態]画面を表示するときは、あらかじめ伝送パラメータ
の設定で「Ethernet」を選択してください。
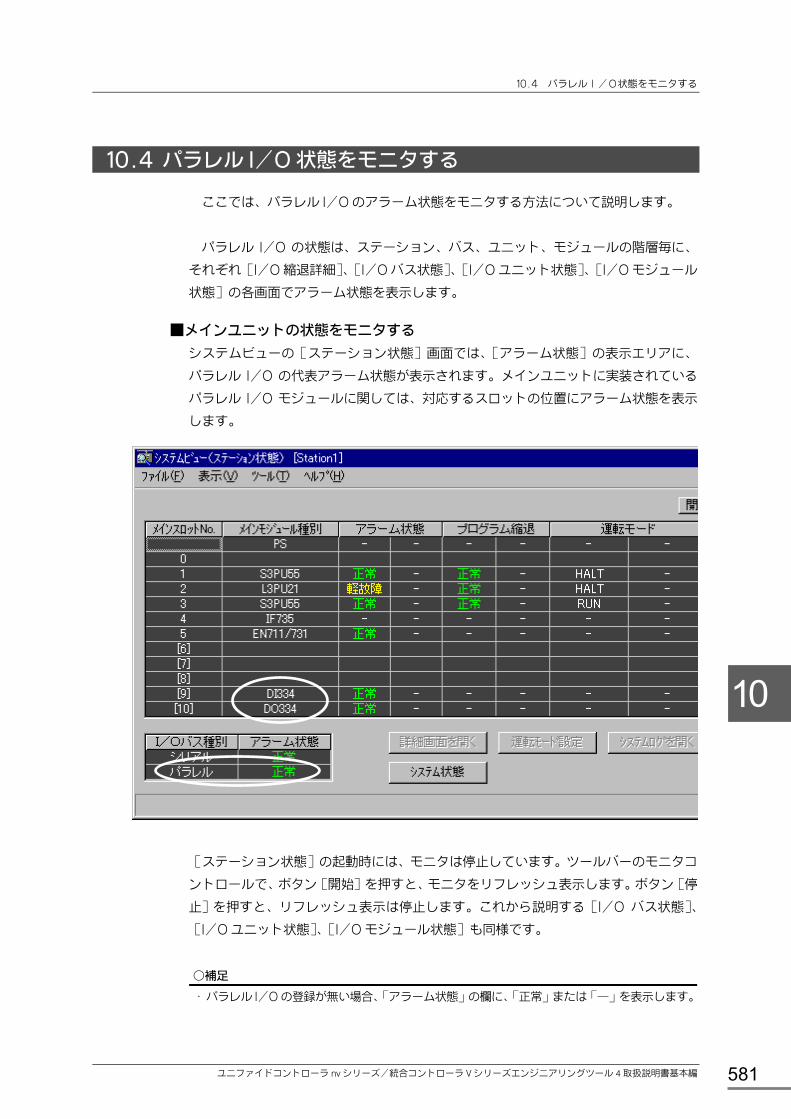
10.4 パラレルI/O状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 581
10.4 パラレル I/O 状態をモニタする
ここでは、パラレル I/O のアラーム状態をモニタする方法について説明します。
パラレル I/O の状態は、ステーション、バス、ユニット、モジュールの階層毎に、
それぞれ[I/O 縮退詳細]、[I/O バス状態]、[I/O ユニット状態]、[I/O モジュール
状態]の各画面でアラーム状態を表示します。
■メインユニットの状態をモニタする
システムビューの[ステーション状態]画面では、[アラーム状態]の表示エリアに、
パラレル I/O の代表アラーム状態が表示されます。メインユニットに実装されている
パラレル I/O モジュールに関しては、対応するスロットの位置にアラーム状態を表示
します。
[ステーション状態]の起動時には、モニタは停止しています。ツールバーのモニタコ
ントロールで、ボタン[開始]を押すと、モニタをリフレッシュ表示します。ボタン[停
止]を押すと、リフレッシュ表示は停止します。これから説明する[I/O バス状態]、
[I/O ユニット状態]、[I/O モジュール状態]も同様です。
○補足
・ パラレル I/O の登録が無い場合、「アラーム状態」の欄に、「正常」または「―」を表示します。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 582
■パラレル I/O モジュールの縮退詳細をモニタする
I/O 縮退詳細画面を表示するには、ステーション状態画面で、メニュー<ツール><
I/O 縮退詳細>を選択します。
一行が1ユニットを意味し、I/O 未登録は「-」、緑の「*」は正常を意味し、赤の数
字は縮退している I/O のスロット番号を意味します。
○補足
・ パラレル I/O の登録が無い場合、メニューを選択できません。
■MELPLAC I/O のモジュールの縮退復帰を行う
ステーション状態画面で、R3PU45+IF72C を選択し、メニュー<ツール><I/O 縮退
詳細>を選択します。
I/O 縮退詳細画面が表示されるので、ボタン[縮退復帰]をクリックします。
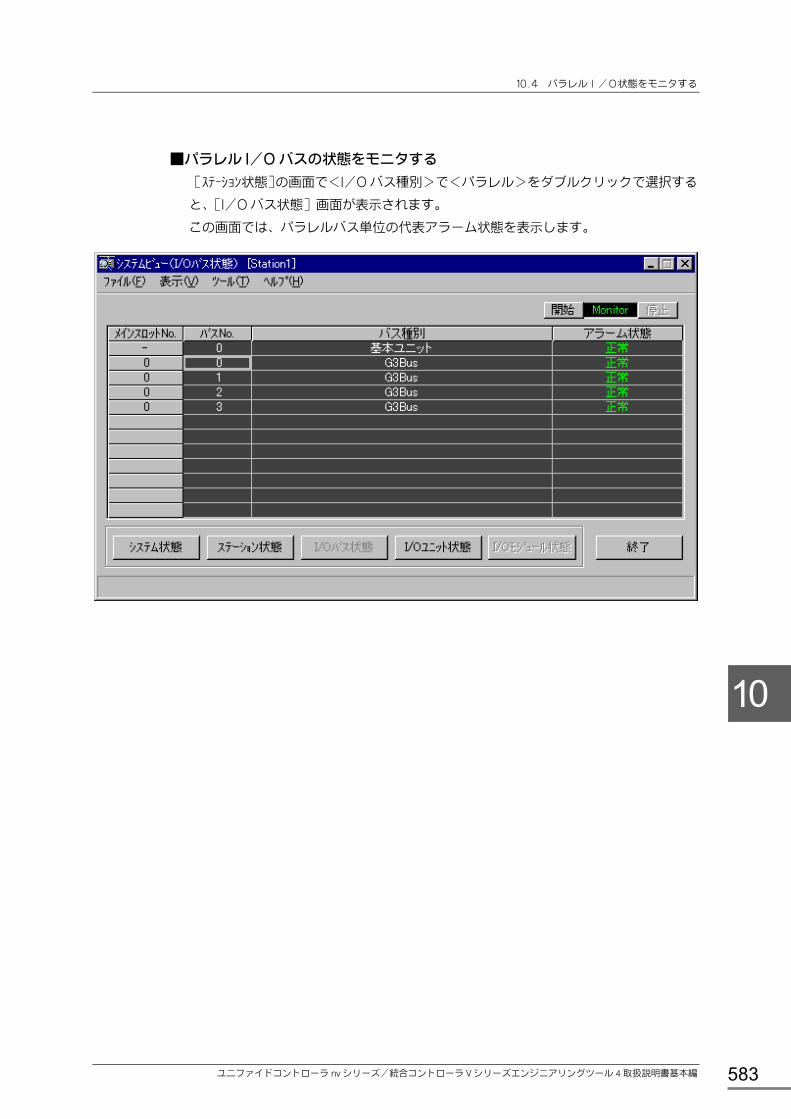
10.4 パラレルI/O状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 583
■パラレル I/O バスの状態をモニタする
[ステーション状態]の画面で<I/O バス種別>で<パラレル>をダブルクリックで選択する
と、[I/O バス状態]画面が表示されます。
この画面では、パラレルバス単位の代表アラーム状態を表示します。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 584
■パラレル I/O ユニットの状態をモニタする
パラレル I/O ユニットの状態を表示するには、バス番号を選択(バス番号が表示され
ている行をクリックする)し、ボタン[I/O ユニット状態]を押します。[I/O ユニッ
ト状態]が表示されます。
ユニット単位で代表アラーム状態を表示します。

10.4 パラレルI/O状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 585
■パラレル I/O モジュールの状態をモニタする
パラレル I/O モジュールの状態を表示するには、ユニット番号を選択(ユニット番号
が表示されている行をクリックする)し、ボタン[I/O モジュール状態]押します。[I/O
モジュール状態]が表示されます。
ユニットに実装されている I/O モジュールのアラーム状態を表示します。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 586
10.5 シリアル I/O 状態をモニタする
ここでは、シリアル I/O のアラーム状態のモニタについて説明します。
シリアル I/O の状態は、バス、ユニット、モジュールという3階層に分けて、それぞ
れ[I/O バス状態]、[I/O ユニット状態]、[I/O モジュール状態]にて代表状態を表
示します。
○補足
・ Model1000 は[I/O バス状態]、[I/O ユニット状態]がありません。
■メインユニットの状態をモニタする
システムビューの[ステーション状態]の<I/O バス>表示エリアのシリアル欄に、シ
リアル I/O の代表アラーム状態が表示されます。
[ステーション状態]の起動時には、モニタは停止しています。ツールバーのモニタコ
ントロールで、ボタン[開始]を押すと、モニタをリフレッシュ表示します。ボタン[停
止]を押すと、リフレッシュ表示は停止します。これから説明する[I/O バス状態]、
[I/O ユニット状態]、[I/O モジュール状態]も同様です。
○補足
・ シリアル I/O の登録が無い場合、「アラーム状態」の欄に、「正常」または「―」を表示します。

10.5 シリアルI/O状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 587
■シリアル I/O バスの状態をモニタする
シリアル I/O バスの状態を表示するには、[I/O バス種別]欄から<シリアル>をダブ
ルクリックで選択します。[I/O バス状態]が表示されます。
バス単位で代表アラーム状態を表示します。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 588
■シリアル I/O ユニットの状態をモニタする
シリアル I/O ユニットの状態を表示するには、バス番号を選択(バス番号が表示され
ている行をクリックする)し、ボタン[I/O ユニット状態]を押します。[I/O ユニッ
ト状態]が表示されます。
ユニット単位で代表アラーム状態を表示します。
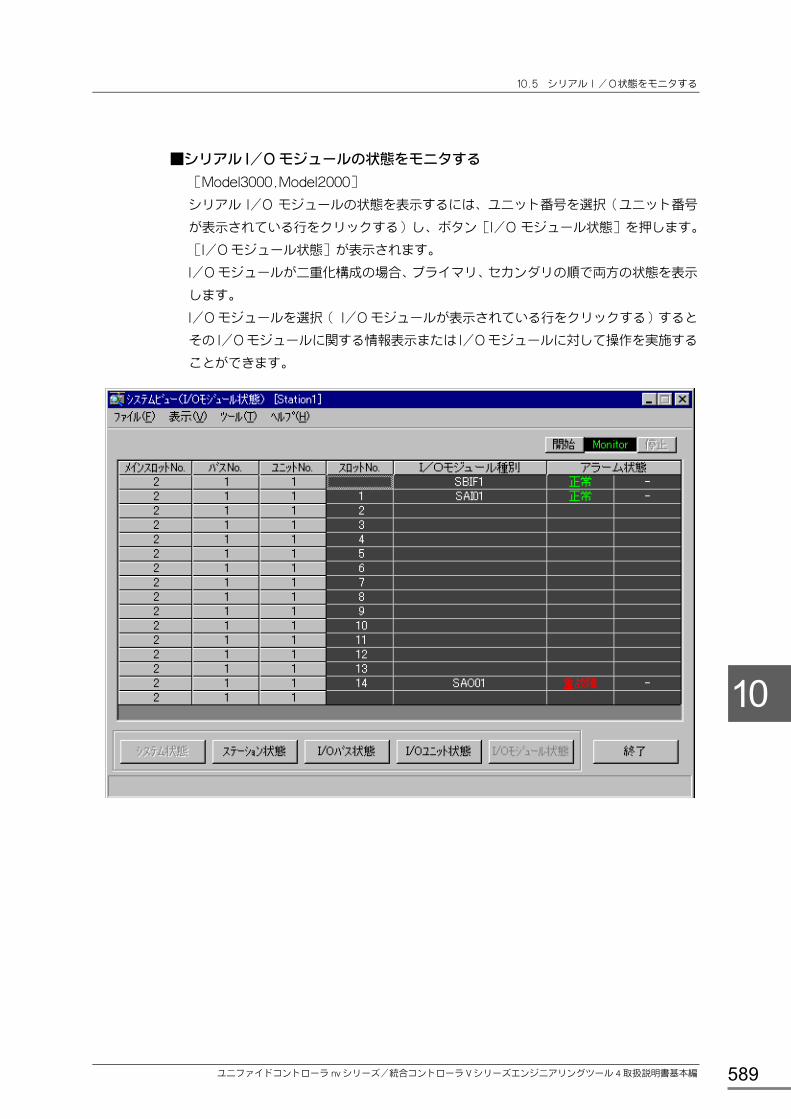
10.5 シリアルI/O状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 589
■シリアル I/O モジュールの状態をモニタする
[Model3000,Model2000]
シリアル I/O モジュールの状態を表示するには、ユニット番号を選択(ユニット番号
が表示されている行をクリックする)し、ボタン[I/O モジュール状態]を押します。
[I/O モジュール状態]が表示されます。
I/O モジュールが二重化構成の場合、プライマリ、セカンダリの順で両方の状態を表示
します。
I/O モジュールを選択( I/O モジュールが表示されている行をクリックする)すると
その I/O モジュールに関する情報表示または I/O モジュールに対して操作を実施する
ことができます。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 590
[Model1000]
シリアル I/O モジュールの状態を表示するには、ステーション状態で[I/O バス種別]
欄から<シリアル>をダブルクリックで選択します。

10.5 シリアルI/O状態をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 591
ハード
■アラームの詳細内容を知る
I/O モジュールにてアラームが発生している場合、詳細内容を知るには、問題の I/O
モジュールの行を選択して、メニュー<表示>< I/O モジュール詳細アラーム>を選
択します。
さらに、アラームの詳細内容を知りたい場合は、[シリアル I/O ログ]により確認する
ことができます。[シリアル I/O ログ]に関しては、「I/O モジュールのログを取得す
る」をご覧ください。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 592
10.6 メインモジュールのログを取得する
ここでは、システムログについて説明します。
システムログは、コントローラの内部に保存している動作履歴です。コントローラの
種類ごとに保存する内容が異なります。
該当モジュール ログ名称 ログ内容
S L EN CN TN FN
エラーログ ハードウェア、ソフトウェア上の異常検出記録。ソフトウェアにはシステム標準プログラムとアプリケーションプログラムを含みます。
○ ○ ○ ○ ○ ○
イベントログ 起動、切替えなどのモジュールの動作状態の変化に関する記録
○ ○ ○ ○ ○ ○
伝送ログ 伝送上での異常検出の記録。 イーサーネットなど、ネットワーク関係の情報を含みます。
○ ○ ○ ○ ○ ○
介入ログ プロセス制御に関するOISからの操作介入の記録。
- ○ - - - ○
■システムログを取得する
[システムビュー]を開き、ログを取得するモジュールを選択し、メニュー<ツール>
<システムログ>を実行すると[システムログ]が表示されます。また、[システムロ
グを開く]ボタンからも起動されます。
[システムログ]には、指定コントローラのシステムログ情報が日付順に表示されます。
デフォルトの設定では、エラーログ、イベントログ、伝送ログ、介入ログのすべての情
報を表示します。
この中から一部だけを選択して表示することもできます。
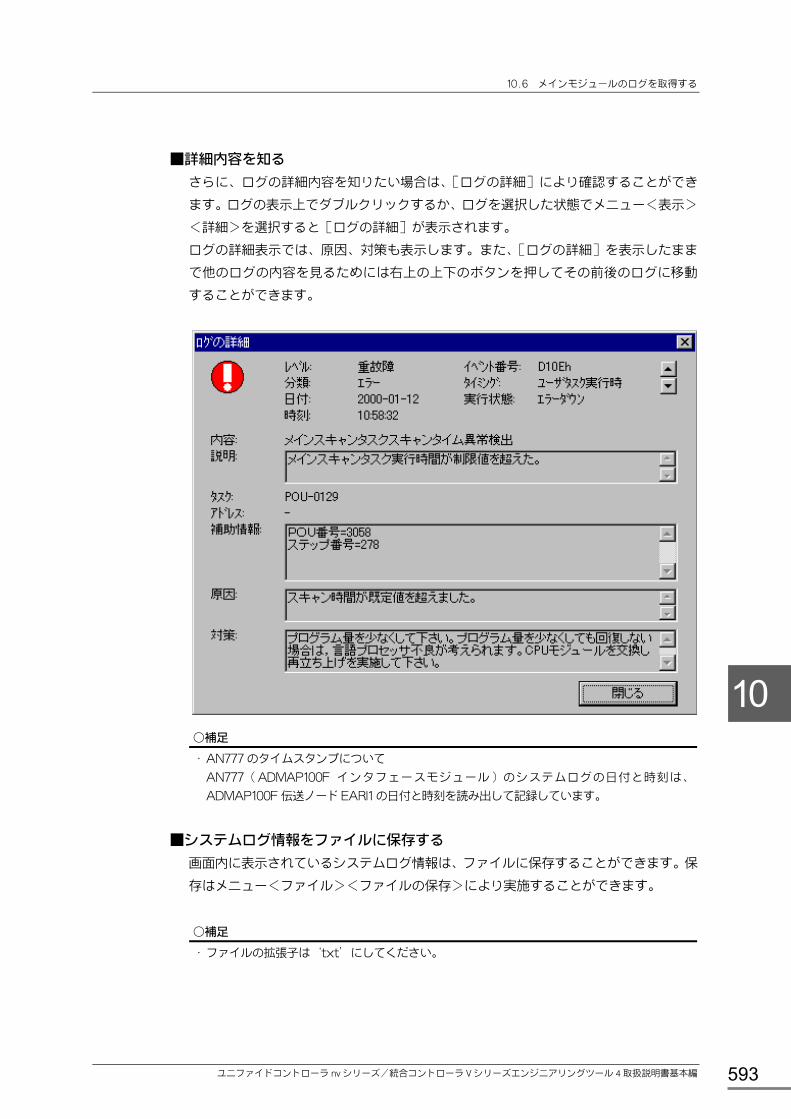
10.6 メインモジュールのログを取得する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 593
■詳細内容を知る
さらに、ログの詳細内容を知りたい場合は、[ログの詳細]により確認することができ
ます。ログの表示上でダブルクリックするか、ログを選択した状態でメニュー<表示>
<詳細>を選択すると[ログの詳細]が表示されます。
ログの詳細表示では、原因、対策も表示します。また、[ログの詳細]を表示したまま
で他のログの内容を見るためには右上の上下のボタンを押してその前後のログに移動
することができます。
○補足
・ AN777 のタイムスタンプについて
AN777(ADMAP100F インタフェースモジュール)のシステムログの日付と時刻は、
ADMAP100F 伝送ノード EARI1 の日付と時刻を読み出して記録しています。
■システムログ情報をファイルに保存する
画面内に表示されているシステムログ情報は、ファイルに保存することができます。保
存はメニュー<ファイル><ファイルの保存>により実施することができます。
○補足
・ ファイルの拡張子は‘txt’にしてください。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 594
■システムログ情報をファイルから表示する
[プロダクトツリー]で、ステーションを選択後、メニュー<ファイル><システムロ
グ>を実行するとシステムログが表示されます。
メニュー<ファイル><ファイルを開く>を選択することにより、ファイル(*.txt)
に保存してあるシステムログを読み出して画面に表示できます。
■ログをクリアする
コントローラ内のログをクリアすることができます。メニュー<表示><ログのクリア
>を選択すると[ログのクリア]ダイアログボックスが表示されます。エラーログ、イ
ベントログ、介入ログ、伝送ログのそれぞれについてクリアするかを選択することがで
きます。全てのボックスをチェックして[OK]ボタンを押すとコントローラ内の全て
のログが一度に消去できます。

10.6 メインモジュールのログを取得する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 595
■CPU ダウン情報を取得する
S コントローラと DS 型の L コントローラはシステムログ以外に、さらに詳細な CPU
ダウン情報を内部に保有しています。万一 CPU がダウンしたときは、この情報を取得
し、当社サービス担当へ送付してください。ここでは、その情報の取得方法を説明しま
す。
○補足
・ S コントローラと DS 型の L コントローラ以外のコントローラでは、この機能をサポートして
おりません。
CPU ダウン情報を取得するには、メニュー<ファイル><CPU ダウン情報の読み出し
>を選択します。読み出した情報は任意のファイル名で保存することができます。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 596
10.7 I/O モジュールのログを取得する
ここでは、シリアル I/O ログについて説明します。
■シリアル I/O ログを取得する
[システムビュー]で「I/O モジュール状態」画面を表示し、メニュー<表示><シリ
アル I/O ログ>を選択すると[シリアル I/O ログ]が起動されます。
[シリアル I/O ログ]は、ログの表示以外に、シリアル I/O モジュール特有の保守操
作が可能です。
[Model3000,Model2000]

10.7 I/Oモジュールのログを取得する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 597
[Model1000]
起動後、ログは表示されていません。メニュー<表示><ログ表示>より下記のログ種
別を選択することにより
ログの読み出しを実施し、表示を行います。
ログ種別 内容
全情報 下記の全情報を一括で読み出します。 ステーションを選択した時だけ有効です。
コントローラ側 シリアルバス RAS情報
シリアルバスRAS情報のうち、Lコントローラ側で管理、保存している情報を読み出します。
SBIF シリアルバス RAS 情報 シリアルバスRAS情報のうち、SBIF側で管理、保存している情報を読み出します。
SBIF I/O バスエラーカウンタ SBIFで保存している、I/O バスのエラーカウンタを読み出します。
I/O バス エラーカウンタ I/O バスのエラーカウンタを読み出します。
SBIF 二重化切替情報 SBIFの二重化切替履歴を読み出します。
I/O モジュールログ インテリジェント I/O モジュール内部のエラーカウンタを読み出します。
I/O モジュール故障情報 インテリジェント I/O モジュール内部の、自己診断結果を読み出します。
I/O バージョン&シリアル番号 インテリジェント I/O モジュールのハード、ソフトバージョンとシリアル番号を読み出します。
タグ情報 インテリジェント I/O モジュールのタグ情報を読み出します。
ログの表示要求は、画面右の<ログ表示>内のドロップダウンリストからも実施するこ
とができます。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 598
■オンライン操作を行う
シリアル I/O モジュールに対する操作は、メニュー<表示><オンライン操作>より
下記の操作項目を選択し、実施することができます。
操作項目 L2 L3
L1 LC
操作内容
コントローラ RAS 情報クリア ○ - コントローラ内に記録しているRAS情報をゼロクリアします。
SBIF,I/O RAS 情報クリア ○ ○ SBIF内に記録しているRAS情報をゼロクリアします。
タグ情報書き込み ○ ○ インテリジェント I/O モジュールに、タグ情報を書き込みます。
AO 出力調整 ○ ○ インテリジェント I/O モジュールのSAO(アナログ出力)で、アナログ出力調整を行います。
オンライン操作要求は、画面右の<オンライン操作>内のドロップダウンリストからも
選択し、実施することができます。
■シリアル I/O ログ情報をファイルに保存する
画面内に表示されているシリアル I/O ログ情報は、テキスト形式にてファイルに保存
することができます。保存はメニュー<ファイル><ファイルの保存>により実施する
ことができます。
■ファイルに保存したシリアル I/O ログ情報を表示する
メニュー<ファイル><ファイルを開く>を選択することにより、ファイルに保存して
あるシリアル I/O ログを読み出して画面に表示します。

10.8 LAN の管理情報をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 599
10.8 LAN の管理情報をモニタする
ここでは、LAN 管理情報について機種ごとに説明します。
■LAN の稼動状態をモニタする(TC-net10)
システムビューの[ステーション状態]において、CNモジュールを選択後、メニュー
<ツール><LAN管理情報>を選択すると[LAN管理情報]が表示されます。
[LAN管理情報]には、以下の情報が表示されます。
●ノードのID(名称、ハードアドレス、IPアドレス、MACアドレス)
●ノードの計測期間(クリアタイムスタンプ、経過時間)
●受信系の状態
●エラーカウンタ(キャリア割れ、CRCエラー)
また、メンテナンス操作として、以下を行うことができます。
●受信系の切替え
●カウンタクリア

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 600
■エラーの詳細内容を知る
エラーカウンタがアップしている場合、詳細内容を知るには、該当ノードの列を選択し
た後、ボタン[詳細]を押すか、該当ノードの列をダブルクリックします。[ノード別
詳細]が表示されます。
[ノード別詳細]には、以下の情報が表示されます。
●エラービットステータス
●エラーカウンタ
異常フレームを送信しているノードとエラーの詳細を知ることができます。
エラービットの意味は以下のとおりです。
エラービット 内 容
0 A系受信正常完了
1 A系受信キャリア無し
2 A系受信キャリア割れ
3 A系受信フレームスタートデリミタ無し
4 A系受信フレームエラー
5 A系受信CRCエラー
6 A系受信サイズエラー
7 A系受信コリジョンエラー
8 B系受信正常完了
9 B系受信キャリア無し
A B系受信キャリア割れ
B B系受信フレームスタートデリミタ無し
C B系受信フレームエラー
D B系受信 CRCエラー
E B系受信サイズエラー
F B系受信コリジョンエラー
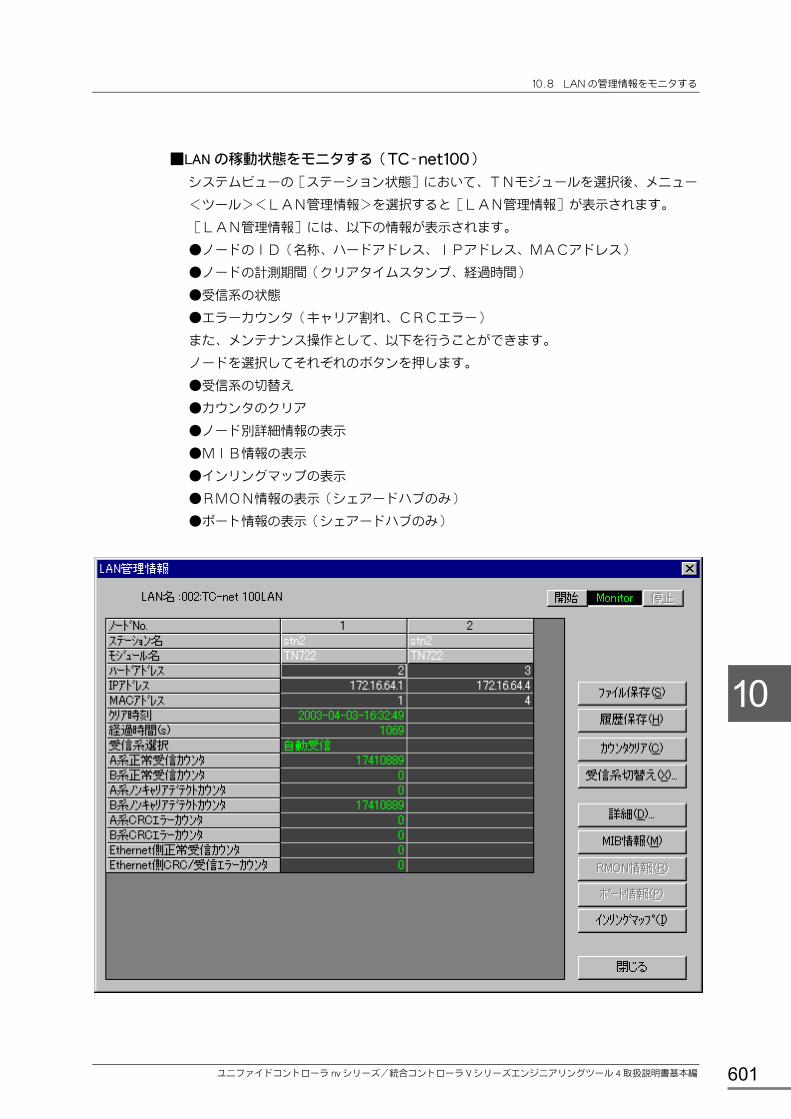
10.8 LAN の管理情報をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 601
■LAN の稼動状態をモニタする(TC-net100)
システムビューの[ステーション状態]において、TNモジュールを選択後、メニュー
<ツール><LAN管理情報>を選択すると[LAN管理情報]が表示されます。
[LAN管理情報]には、以下の情報が表示されます。
●ノードのID(名称、ハードアドレス、IPアドレス、MACアドレス)
●ノードの計測期間(クリアタイムスタンプ、経過時間)
●受信系の状態
●エラーカウンタ(キャリア割れ、CRCエラー)
また、メンテナンス操作として、以下を行うことができます。
ノードを選択してそれぞれのボタンを押します。
●受信系の切替え
●カウンタのクリア
●ノード別詳細情報の表示
●MIB情報の表示
●インリングマップの表示
●RMON情報の表示(シェアードハブのみ)
●ポート情報の表示(シェアードハブのみ)

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 602
■LAN の稼動状態をモニタする(ADMAP-5M)
システムビューの[ステーション状態]において、AN モジュールを選択後、メニュー
<ツール><LAN 管理情報>を選択すると[LAN 管理情報]が表示されます。
[LAN 管理情報]には、以下の情報が表示されます。
●ノードのID(MACアドレス)
●ノードの計測期間(クリアタイムスタンプ、経過時間)
●受信系の状態
●エラーカウンタ
また、メンテナンス操作として、以下を行うことができます。
●データの更新
●ファイルへの保存
●カウンタのクリア
●受信系の切替え
●詳細情報の表示
●インリングマップの表示
■エラーの詳細内容を知る
エラーカウンタがアップしている場合、詳細内容を知るには、該当ノードの列を選択し
た後、ボタン[詳細]を押すか、該当ノードの列をダブルクリックします。[ノード別
詳細]が表示されます。
[ノード別詳細]には、以下の情報が表示されます。
●エラービットステータス
●エラーカウンタ
また、メンテナンス操作として、以下を行うことができます。
●ファイルへの保存
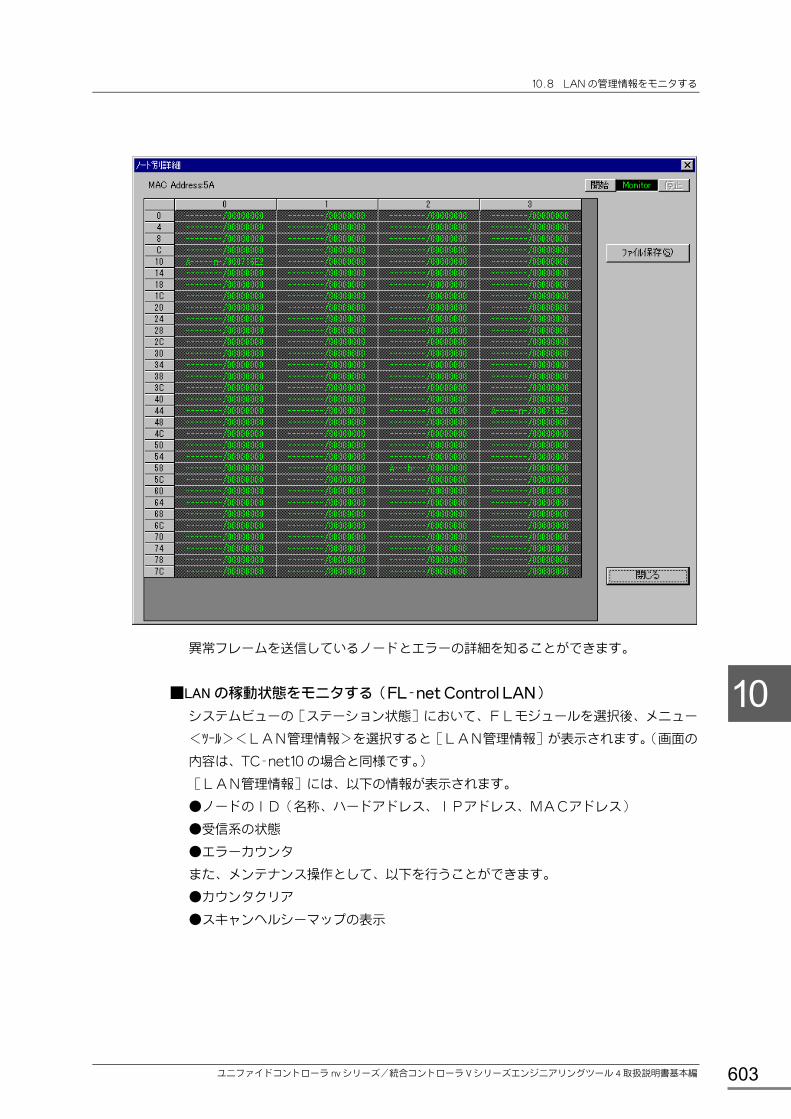
10.8 LAN の管理情報をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 603
異常フレームを送信しているノードとエラーの詳細を知ることができます。
■LAN の稼動状態をモニタする(FL-net Control LAN)
システムビューの[ステーション状態]において、FLモジュールを選択後、メニュー
<ツール><LAN管理情報>を選択すると[LAN管理情報]が表示されます。(画面の
内容は、TC-net10 の場合と同様です。)
[LAN管理情報]には、以下の情報が表示されます。
●ノードのID(名称、ハードアドレス、IPアドレス、MACアドレス)
●受信系の状態
●エラーカウンタ
また、メンテナンス操作として、以下を行うことができます。
●カウンタクリア
●スキャンヘルシーマップの表示

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 604
■スキャンヘルシーを表示する(TC-net100,ADMAP-5M)
システムビューの[ステーション状態]において、TN,AN モジュールを選択後、メニ
ュー<ツール><LAN 送信マップ>を選択します。
ブロックにはノードの番号が表示され、数値が緑色ならヘルシー、赤色ならアンヘルシ
ーを意味します。
また、メンテナンス操作として、以下を行うことができます。
●スキャンアンヘルシーのクリア
●重複送信しているステーションアドレスのクリア
■スキャンデータを表示する(TC-net100,ADMAP-5M)
[LAN 送信マップ]にて、任意の送信ブロックを選択して、メニュー<表示><スキ
ャンデータ>を選択します。
ワード単位で値を変更することができます。
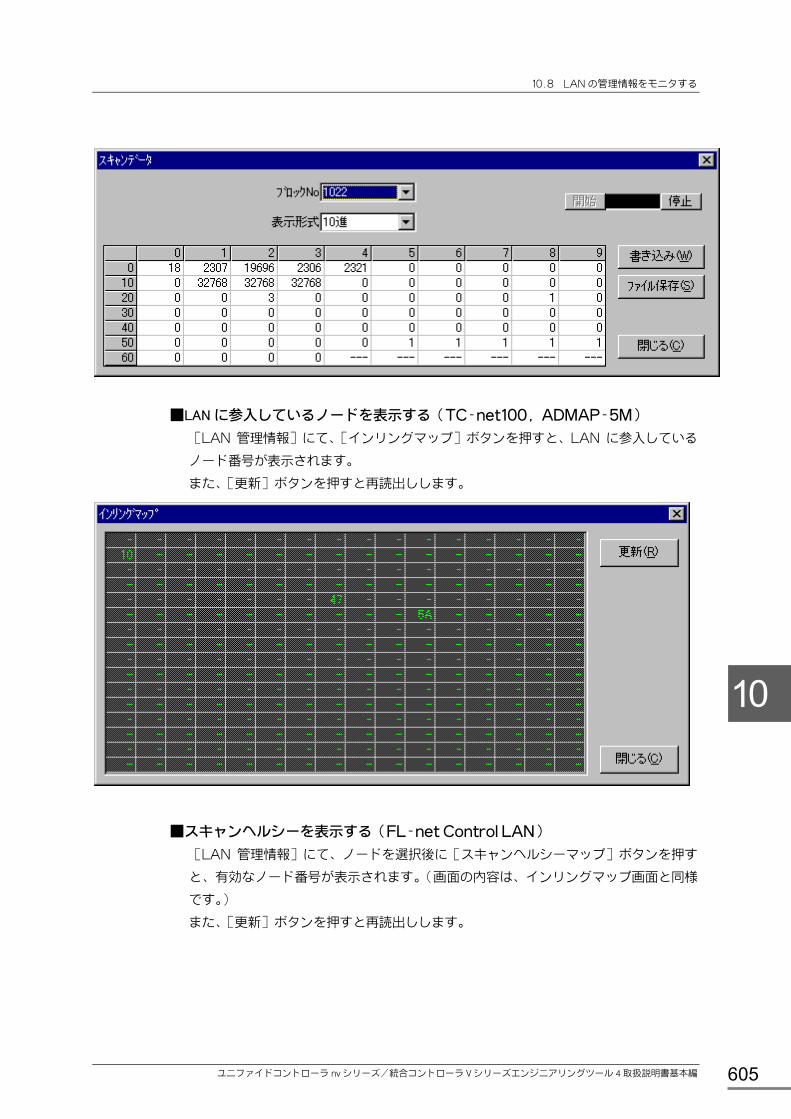
10.8 LAN の管理情報をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 605
■LAN に参入しているノードを表示する(TC-net100,ADMAP-5M)
[LAN 管理情報]にて、[インリングマップ]ボタンを押すと、LAN に参入している
ノード番号が表示されます。
また、[更新]ボタンを押すと再読出しします。
■スキャンヘルシーを表示する(FL-net Control LAN)
[LAN 管理情報]にて、ノードを選択後に[スキャンヘルシーマップ]ボタンを押す
と、有効なノード番号が表示されます。(画面の内容は、インリングマップ画面と同様
です。)
また、[更新]ボタンを押すと再読出しします。
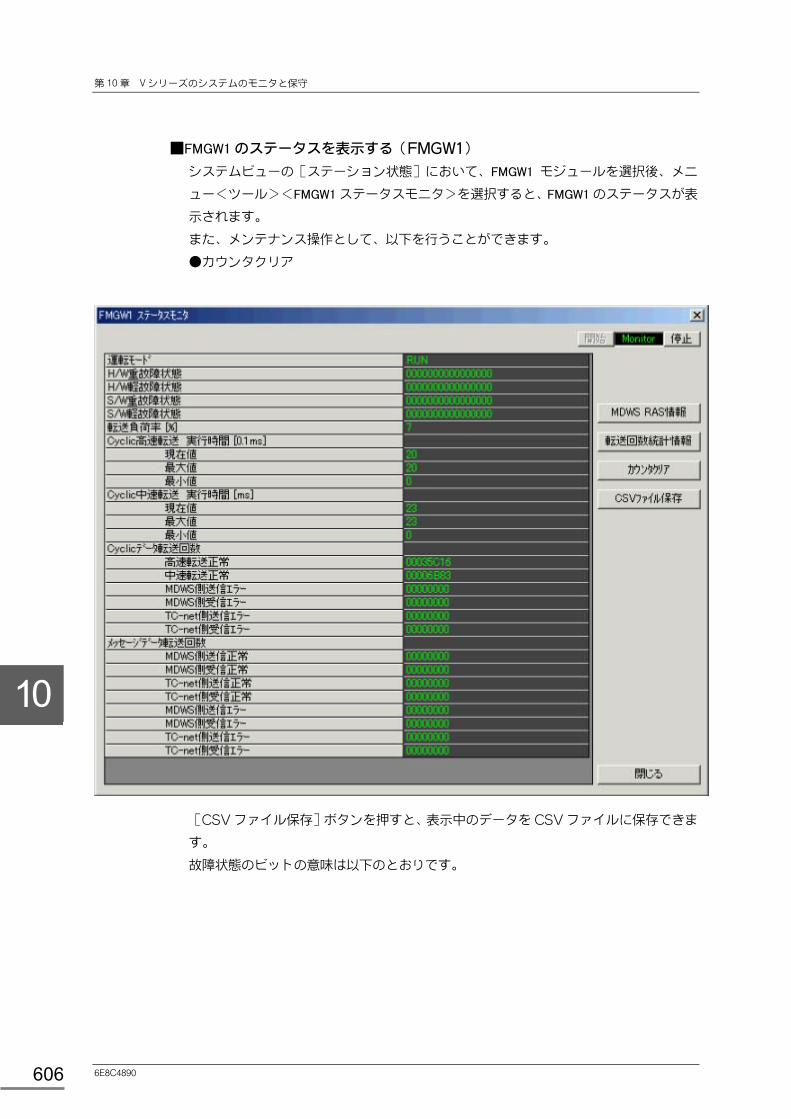
第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 606
■FMGW1 のステータスを表示する(FMGW1)
システムビューの[ステーション状態]において、FMGW1 モジュールを選択後、メニ
ュー<ツール><FMGW1 ステータスモニタ>を選択すると、FMGW1 のステータスが表
示されます。
また、メンテナンス操作として、以下を行うことができます。
●カウンタクリア
[CSV ファイル保存]ボタンを押すと、表示中のデータを CSV ファイルに保存できま
す。
故障状態のビットの意味は以下のとおりです。

10.8 LAN の管理情報をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 607
・H/W 重故障状態
ビット アラーム種類 タイミング
0-F 未使用 -
・H/W 軽故障状態
ビット アラーム種類 タイミング
0 DUM2 ALM2 異常割込み (DUM2 軽故障)
1 DUM2 FPGA-Fenix 間パリティエラー 異常割込み (DUM2 パリティエラー)
2 DUM2 FPGA-Fenix 間バスストール 異常割込み (DUM2 バスストール)
3 DUM2 FIFO オーバラン 異常割込み (FPGA-FIFO オーバーラン)
4 FPGA DMA 転送サイズ異常 異常割込み (DMA 転送サイズ異常)
5 CPU バスストール 異常割り込み (CPU バスストール)
6-9 未使用 -
A FROM BCC 異常 定期診断 (フラッシュ ROM BCC 異常)
B-F 未使用 -
・S/W 重故障状態
ビット アラーム種類 タイミング
0-F 未使用 -
・S/W 軽故障状態
ビット アラーム種類 タイミング
0 STN-SW が 0 または FF 初期診断
1-3 未使用 -
4 スキャントーカブロック重複 定期診断
5 スキャンノード重複 定期診断
6 スキャンパラメータ不一致 定期診断
7 ステータス転送登録異常 ダウンロード時
8-F 未使用 -
[FMGW1 ステータスモニタ]にて、[MDWS RAS 情報]ボタンを押すと、MDWS の
RAS データと CPU 情報が表示されます。
[更新]ボタンを押すと再読出しします。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 608
[CSV ファイル保存]ボタンを押すと、表示中のデータを CSV ファイルに保存できま
す。
[FMGW1 ステータスモニタ]にて、[転送回数統計情報]ボタンを押すと、Cyclic デ
ータ転送回数とメッセージデータ転送回数の統計情報が表示されます。
[更新]ボタンを押すと再読出しします。

10.8 LAN の管理情報をモニタする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 609
[CSV ファイル保存]ボタンを押すと、表示中のデータを CSV ファイルに保存できま
す。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 610
10.9 さまざまなメンテナンス機能
コントローラの動作状態の変更操作、コントローラのメモリ内容のメンテナンス、
TC-net の受信系状態の変更操作、そしてシリアル I/O モジュールのアラーム状態解
除操作について説明します。
・時刻設定
・運転状態の切り替え
・二重化の切り替え
・受信系の切り替え
・メモリクリア
・デフラグ
・バックアップ/リストア
・FROM書き込み
・FROM読み出し
・出力リセット解除
・リードバック異常リセット
・I/O 活線着脱の指定

10.9 さまざまなメンテナンス機能
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 611
10.9.1 時刻設定
ここでは、時刻の表示および設定について説明します。
■時刻を設定する
コントローラの時刻を表示または設定するには、システムビューの[ステーション状態]
のメニュー<ツール><時刻設定>を選択します。[時刻設定]が表示されます。
メインユニットに実装されている各コントローラの時刻が表示されます。ステーション
が二重化構成の場合、プライマリ、セカンダリの順で両方の時刻を表示します。
また、エンジニアリングツールが動作しているパソコンの時刻も表示します。
第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 612
ボタン[時刻設定]を押すとエンジニアリングツールが動作しているパソコンの時刻を
コントローラに設定します。
イーサーネット経由で接続で接続している場合は、ネットワーク上の全てのステーショ
ン、コントローラの時刻を変更します。また、RS-232C 経由で接続で接続している場
合は、コントローラの時刻を変更します。
●注記
・ イーサネット経由で全ステーションの時刻を設定する場合には、以下の設定が正しく行われて
いる必要があります。
・ EN モジュールのパラメータ設定
・ ツールの<伝送パラメータ設定>
・ ツールを使用する PC の IP アドレス設定
詳細は、「第7章 ダウンロード」の「7.1 コントローラと接続する」を参照してください。
特に、任意の IP アドレスを指定する場合の注意点は、以下のとおりです。
・ 伝送パラメータ設定の自局設定を「シングル(フリーモード)」とする。
・ PC の IP アドレス設定のサブネットマスクと EN モジュールのサブネットマスクを一致させる。
○補足
AN777 の時刻設定について
・AN777 は、システムビューから時刻設定を実施しません。
・システムビューで表示される AN777 の時刻は、ADMAP-100F の伝送ノード EARI1 の時刻を
読み出して表示しています。
10.9.2 運転状態の切り替え
ここでは、コントローラの運転状態の切り替えについて説明します。
運転状態 対象コントローラ
RUN HALT HOLD RUNF HOLD 解除 エラーリセット
S3, S2 ○ ○ ○ ○ ○ ○
L3, L2, L1, LC, R3, R2, FN, CN614,FL654,FL754
○ ○ - - - ○
●注記
・ RUN、HALT などの運転状態の内容については、それぞれのコントローラの取扱説明書をご覧
ください。
・運転状態の種類によっては、コントローラが制御を実行しなくなる状態があります。また、運転
状態を変更することにより制御系に影響を与える可能性があります。運転状態を変更するとき
には、制御系への影響を確認のうえで行ってください。
・コントローラを二重化したシステムでは、運転状態を変更することによって二重化切り替えが発
生する場合があります。運転状態と二重化の動作状態の関係については、各コントローラの取
扱説明書をご覧ください。

10.9 さまざまなメンテナンス機能
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 613
■運転状態を切り替える
運転状態は、システムビューの[ステーション状態]において確認することができます。
運転状態を変更したい場合は、変更するコントローラを選択後、メニュー<ツール><運
転モード設定>を選択します。
[運転モード設定]ダイアログボックスが表示されます。
運転状態を変更する場合は、[運転モード設定]ダイアログボックス内の目的のモード
のボタンを押します。
指定した運転状態の切り替え要求を実行します。
実行後、目的の運転状態に切り替わっていることを確認ください。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 614
10.9.3 二重化の切り替え
ここでは、二重化ステーションのオンライン/スタンバイ切り替え、イコライズ、お
よび強制 RUN について説明します。
■二重化ステーションのオンライン/スタンバイを切り替える
二重化状態は、システムビューの[ステーション状態]において確認することができま
す。オンライン/スタンバイ状態を変更したい場合は、コントローラを選択後、メニュ
ー<ツール><二重化設定>を選択します。
[二重化設定]ダイアログボックスが表示されます。
オンライン/スタンバイ状態を変更する場合は、ボタン[二重化切替]を押します。
オンラインステーションがスタンバイに切り替わり、スタンバイステーションがオンラ
インに切り替わります。
また、イコライズを実施したい場合は、送信相手を選択してボタン[イコライズ要求]
を押します。

10.9 さまざまなメンテナンス機能
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 615
オンラインステーションとスタンバイステーションとの情報が等値化されます。
また、強制 RUN を実施したい場合は、送信相手を選択してボタン[強制 RUN 要求]
を押します。
トラッキングケーブルが接続されていなくても強制的に単独オンラインになります。
○補足
・オンライン/スタンバイ状態切替え、イコライズ、強制 RUN の詳細内容については、それぞれ
のコントローラの取扱説明書をご覧ください。
10.9.4 受信系の切り替え
ここでは、TC-net の受信系状態の切り替えについて説明します。
受信系状態には、以下の3つの状態が存在します。
●自動受信
●A 系強制受信
●B 系強制受信
■TC-net の受信系状態を切り替える
システムビューの[ステーション状態]において、CNモジュールを選択後、メニュー
<ツール><TC-net受信系切替え>を選択します。
[TC-net受信系切替え]ダイアログボックスが表示されます。
受信系状態が表示されます。ステーションが二重化構成の場合、プライマリ、セカンダ
リの順で両方の受信系状態を表示します。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 616
起動時には、モニタは停止しています。ツールバーのモニタコントロールで、ボタン[開
始]を押すと、モニタをリフレッシュ表示します。ボタン[停止]を押すと、リフレッ
シュ表示は停止します。
受信系状態を変更する場合は、目的の切替えボタンを押して受信系状態切替え要求を実
行します。
実行後、目的の受信系状態に切り替わっていることを確認ください。
10.9.5 メモリクリア
メモリクリアとは、コントローラのユーザー用メモリを全てゼロクリアします。コン
トローラを交換した時など、完全に初期化して再起動する場合などに使用します。
対象コントローラ
L3 L2 L1,LC S3 S2 R3 FN CN614 FL654/
754 メモリクリア
○ ○ ○ ○ ○ ○ ○ ○ ○
■コントローラのメモリをクリアする
システムビューの[ステーション状態]において、コントローラを選択後、メニュー<
ツール><メンテナンス>を選択します。[メンテナンスパネル]は、コントローラのメモ
リを保守するための画面です。
タブ<メモリ操作>を選択し、プルダウンメニュー<操作>より「メモリクリア」を選
択します。そして、ボタン[OK]を押すとメモリクリア要求を実行します。
メモリクリアの操作はHALT状態で実行可能です。

10.9 さまざまなメンテナンス機能
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 617
●注記
・ [メンテナンスパネル]からメモリクリアが実行できるのは、コントローラの基本プログラム
が正常に動作して いる場合に限られます。パリティエラーなどメモリの異常状態が復旧しない
場合には、コントローラのスイッチによるメモリクリアが必要となる場合があります。この場
合は、コントローラの取扱説明書にしたがって強制的にメモリクリアを実行してください
10.9.6 デフラグ
デフラグとは、コントローラのユーザー用メモリのうちアプリケーションプログラム、
ローカル変数領域を再配置し、空領域を確保します。
対象コントローラ
L3 L2 L1, LC S3 S2 R3 R2 STC FNデフラグ
○ ○ ○ ○ ○ - - - -
■コントローラのメモリをデフラグする
システムビューの[ステーション状態]において、コントローラを選択後、メニュー<
ツール><メンテナンス>を選択します。[メンテナンスパネル]は、コントローラのメモ
リを保守するための画面です。
タブ<メモリ操作>を選択し、プルダウンメニュー<操作>より「デフラグ」を選択し
ます。そして、ボタン[OK]を押すとデフラグ要求を実行します。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 618
10.9.7 バックアップ/リストア
バックアップとは、コントローラのメモリ内容をツールのハードディスクに保存する
ことです。
リストアとは、ツールのハードディスクに保存してあるメモリ内容をコントローラに
書き込むことです。
対象コントローラ
L3 L2 L1, LC S3 S2 R3 R2 STC FNバックアップ/
リストア ○ ○ ○ ○ ○ ○ ○ ○ ○
■バックアップを行う
あからじめ対象コントローラをHALT状態に切り替えておきます。
システムビューの[ステーション状態]において、対象コントローラを選択後、<メン
テナンス>ボタンを押します。<コマンド>プルダウンメニューより「バックアップ」
を選択します。[OK]ボタンを押すとバックアップ要求を実行します。バックアップ
処理中は実行経過がバーグラフで表示され、完了するとファイル保存ダイアログが表示
されます。
実行中に中止したい場合は[キャンセル]ボタンを押してください。
●注記
・ L コントローラに対するバックアップを中止した後で再度バックアップを行う場合は、中止後
20 秒以上間隔をあけてから実行してください。

10.9 さまざまなメンテナンス機能
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 619
■リストアを行う
システムビューの[ステーション状態]において、対象コントローラを選択後、<メン
テナンス>ボタンを押します。
あからじめ対象コントローラをDL-WAIT状態に切り替えておきます。
[メンテナンスパネル]の<コマンド>プルダウンメニューより「リストア」を選択し
ます。[OK]ボタンを押すとファイル選択ダイアログが表示されますのでリストアする
ファイルを選択します。
リストア処理中は実行経過がバーグラフで表示されます。
実行中に中止したい場合は[キャンセル]ボタンを押してください。
●注記
・ リストアを中止した場合、コントローラのデータが不完全な状態となりコントローラは正常動
作しなくなります。
・ L コントローラに対するリストアを中止した後で再度リストアを行う場合は、中止後 20 秒以上
間隔をあけてから実行してださい。
10.9.8 FROM 書き込み
FROM 書き込みとは、モジュールにダウンロードしたデータをモジュール内部の ROM
にバックアップする機能です。
対 象 機 種 メニュー名称 L3
type1 L3
type2L2 L1
LCS3 S2 R3 STC FN CN TN
TL8000
フラッシュROM書き込み - - - ○ ○ ○ ○ ○ - - -
タグパラメータ保存 - ○ - - - - - - ○ - -
EEPROM書き込み - - - - - - - - - ○ ○
■ROM書き込みを行う
システムビューの[ステーション状態]において、モジュールを選択後、メニュー<ツー
ル><メンテナンス>を選択します。[メンテナンスパネル]は、コントローラのメモリ
を保守するための画面です。
<メモリ操作>タブを選択し、プルダウンメニュー<操作>より選択します。(機種に
よって選択メニューが異なります)
そして、ボタン[OK]を押すとモジュールにROM書き込み要求を行います。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 620
○補足
・ フラッシュROM書き込みはHALT状態で実行可能です。(コントローラの場合のみ)
10.9.9 FROM 読み出し
FROM 読み出しとは、モジュール内の ROM にバックアップされているデータを読み出
して RAM に格納する機能です。
対 象 機 種 メニュー名称 L3
type1 L3
type2L2
L1 LC
S3 S2 R3 STC FN CN TN
フラッシュROM読み出し - - - - ○ ○ ○ ○ - - -
タグパラメータ復元 - ○ - - - - - - ○ - -
■ROM読み出しを行う
システムビューの[ステーション状態]において、コントローラを選択後、メニュー<
ツール><メンテナンス>を選択します。[メンテナンスパネル]は、コントローラのメモ
リを保守するための画面です。
<メモリ操作>タブを選択し、プルダウンメニュー<操作>より選択します。(機種に
よって選択メニューが異なります)
そして、ボタン[OK]を押すとモジュールに ROM 読み出し要求を行います。
○補足
・ ROM 読み出しの操作はコントローラがHALT状態で実行可能です。
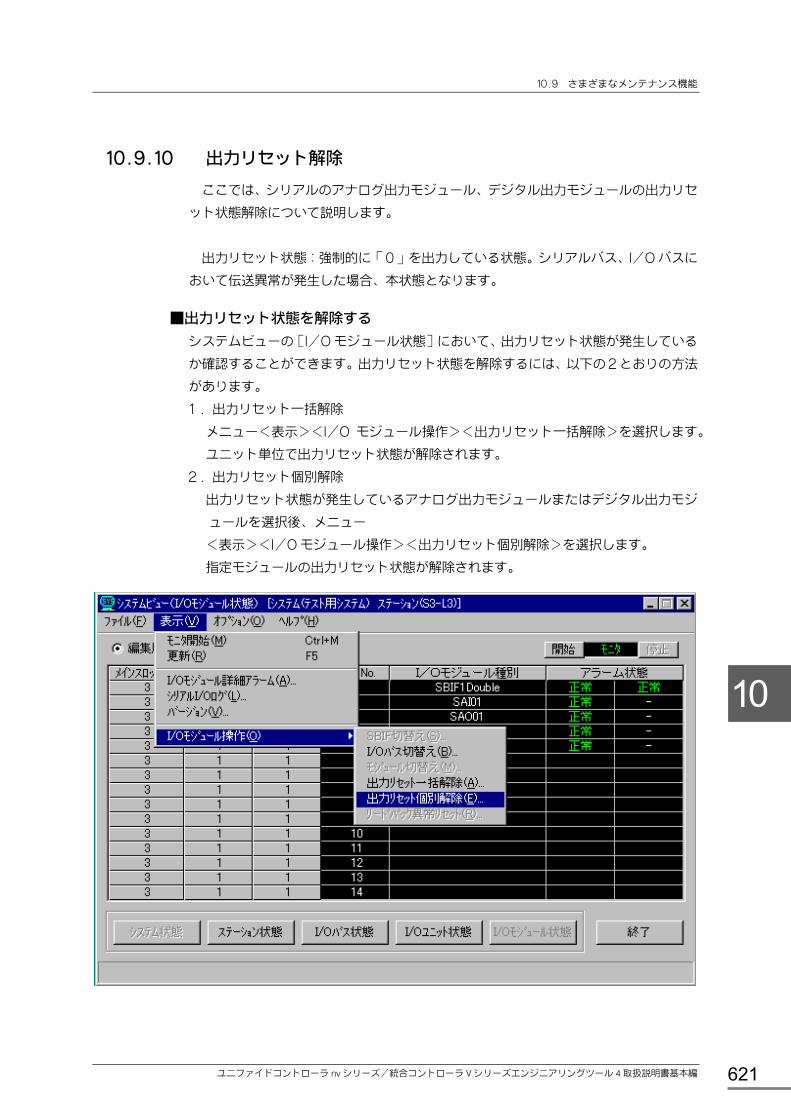
10.9 さまざまなメンテナンス機能
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 621
10.9.10 出力リセット解除
ここでは、シリアルのアナログ出力モジュール、デジタル出力モジュールの出力リセ
ット状態解除について説明します。
出力リセット状態:強制的に「0」を出力している状態。シリアルバス、I/O バスに
おいて伝送異常が発生した場合、本状態となります。
■出力リセット状態を解除する
システムビューの[I/O モジュール状態]において、出力リセット状態が発生している
か確認することができます。出力リセット状態を解除するには、以下の2とおりの方法
があります。
1.出力リセット一括解除
メニュー<表示><I/O モジュール操作><出力リセット一括解除>を選択します。
ユニット単位で出力リセット状態が解除されます。
2.出力リセット個別解除
出力リセット状態が発生しているアナログ出力モジュールまたはデジタル出力モジ
ュールを選択後、メニュー
<表示><I/O モジュール操作><出力リセット個別解除>を選択します。
指定モジュールの出力リセット状態が解除されます。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 622
10.9.11 リードバック異常リセット
ここでは、シリアルの二重化アナログ出力モジュールの「リードバック異常」アラー
ムリセットについて説明します。
本操作は、出力断線により発生したスタンバイ側モジュールの「リードバック異常」
アラームをリセットするための機能です。
■リードバック異常をリセットする
システムビューの[I/O モジュール状態]において、「リードバック異常」アラームが
発生しているか確認することができます。「リードバック異常」アラームが発生してい
る二重化アナログ出力モジュールを選択後、メニュー<表示><I/O モジュール操作>
<リードバック異常リセット>を選択します。
スタンバイ側モジュールの「リードバック異常」アラームがリセットされます。
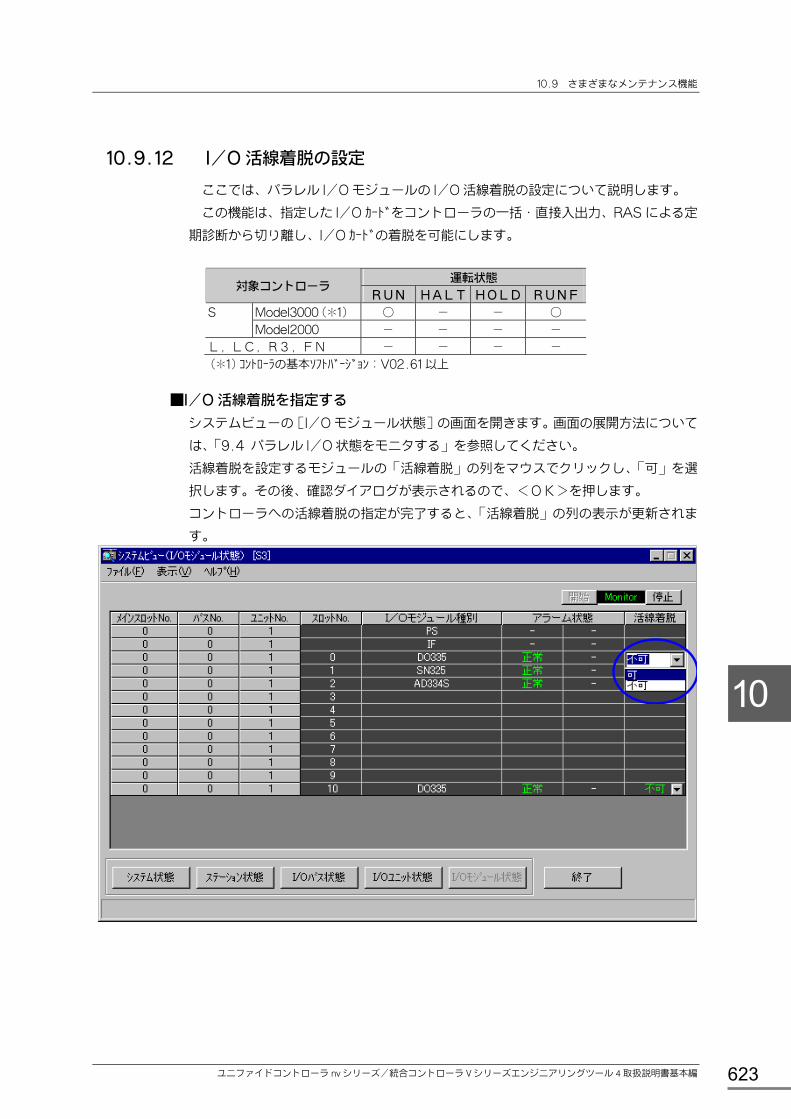
10.9 さまざまなメンテナンス機能
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 623
10.9.12 I/O 活線着脱の設定
ここでは、パラレル I/O モジュールの I/O 活線着脱の設定について説明します。
この機能は、指定した I/O カードをコントローラの一括・直接入出力、RAS による定
期診断から切り離し、I/O カードの着脱を可能にします。
運転状態 対象コントローラ
RUN HALT HOLD RUNF
Model3000(*1) ○ - - ○ S
Model2000 - - - -
L,LC,R3,FN - - - -
(*1)コントローラの基本ソフトバージョン:V02.61 以上
■I/O 活線着脱を指定する
システムビューの[I/O モジュール状態]の画面を開きます。画面の展開方法について
は、「9.4 パラレル I/O 状態をモニタする」を参照してください。
活線着脱を設定するモジュールの「活線着脱」の列をマウスでクリックし、「可」を選
択します。その後、確認ダイアログが表示されるので、<OK>を押します。
コントローラへの活線着脱の指定が完了すると、「活線着脱」の列の表示が更新されま
す。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 624
■ステーション全体の I/O 活線着脱の状態を表示する
システムビューの「ステーション状態」の画面を開きます。左端に実装されている S コ
ントローラを選択して、メニュー<ツール><I/O 縮退詳細>を選択します。
「I/O 縮退詳細」の画面が表示されます。活線着脱が指定されたモジュールは、黄色で
表示されます。
背景色と表示される文字の意味は次のとおりです。
表示している文字 背景色
数字 *
黒 I/Oが実装され、縮退中である。活線着脱は不可
I/O が実装され、正常である。 活線着脱は不可
黄 I/Oが実装され、縮退中である。活線着脱が可能
I/O が実装され、正常である。 活線着脱が可能
-: I/O カードの登録無し。
■I/O 活線着脱の指定を解除する
活線着脱を解除するモジュールの「活線着脱」の列をマウスでクリックし、「不可」を
選択します。
また、コントローラの運転モードを「HALT」から「RUN」に切り替えた場合は、一括して解除
されます。

10.10 RAS の画面を外部から起動する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 625
10.10 RAS の画面を外部から起動する
ここでは、V-Tool 以外のユーザアプリケーションから、システムビューやシステムロ
グの画面を外部から起動する方法を説明します。
■前提条件と方式
1) ユーザアプリケーションは、V-Tool と同じ PC(パーソナルコンピュータ)、同じ
プラットフォームにあるものとします。
2) その PC は、少なくともユーザアプリケーションと V-Tool が同時に動作するのに
十分なリソース(CPU,メモリ,デイスク)を持っているものとします。
3) V-Tool とユーザアプリケーションは、全く独立に構成されているので、Windows
の Shell を使って、起動コマンドを実行します。
■システムビューでステーション状態を表示する
・起動パラメータ
パラメータ 意味 例
プログラムファイル名 システムビューのプログラムファイル名(フルパス指定)
C:\Program Files \VEngTool\SysView
/T システムビューのウィンドウを 前面に表示するときに指定する。省略可能。 注意:「/T」を指定する時は、必ず「/M」を続けて指定してください
/T /M
/M 表示機能のメニューのみ有効にするときに指定する。省略可能。
/M
システム名称 表示するシステムの名称 SystemName
ステーション名称 表示するステーションの名称 StatI/OnName
・ 起動コマンド
システムビューを起動するときの Shell コマンド文字列は、前記起動パラメータを使
い、下記のとおりです。
起動コマンド
{プログラムファイル名} /T /M {システム名称}, {ステーション名称}
起動コマンドの実例 [スタンドアロン版]/[クライアント・サーバ版]共通 “C:\Program Files\VEngTool\SysView” /T /M SystemName,StatI/OnName
○補足
・ プログラムファイルのパス名が”Program Files”のようにスペースを含む場合は、DOS コマン
ドで区切りと見なされることのないように、プログラムファイルのパス名全体を、ダブルコー
テーションで括ります。
・コマンド起動されたシステムビューにおいて、[システムログ]ボタンは有効です。選択したメ
インモジュールの[システムログ]を開くことが可能です。

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 626
■システムビューで TC-net100 の状態を表示する
・起動パラメータ
パラメータ 意味 例
プログラムファイル名 システムビューのプログラムファイル名(フルパス指定)
C:\Program Files \VEngTool\SysView
/T システムビューのウィンドウを 前面に表示するときに指定する。省略可能。 注意:「/T」を指定する時は、必ず「/M」を続けて指定してください
/T /M
/M 表示機能のメニューのみ有効にするときに指定する。省略可能。
/M
システム名称 表示するシステムの名称 SystemIName
ステーション名称 表示するステーションの名称 StatI/OnName
スロット番号 TC-net100 モジュールの接続されたメインユニットのスロット番号
2
バス番号 0固定(未使用) 0
ユニット番号 0固定(未使用) 0
画面番号 表示する画面の種別を番号で指定する 0:LAN送信マップ 1:LAN管理情報
1
・ 起動コマンド
システムビューを起動するときの Shell コマンド文字列は、前記起動パラメータを
使い、下記のとおりです。
起動コマンド
{プログラムファイル名} /T /M {システム名称}, {ステーション名称}, {スロット番号}, {バス番号}, {ユニット番号}, {画面番号}
起動コマンドの実例 [スタンドアロン版]/[クライアント・サーバ版]共通 “C:\Program Files\VEngTool\SysView” /T /M SystemName,StatI/OnName, 2, 0, 0, 1
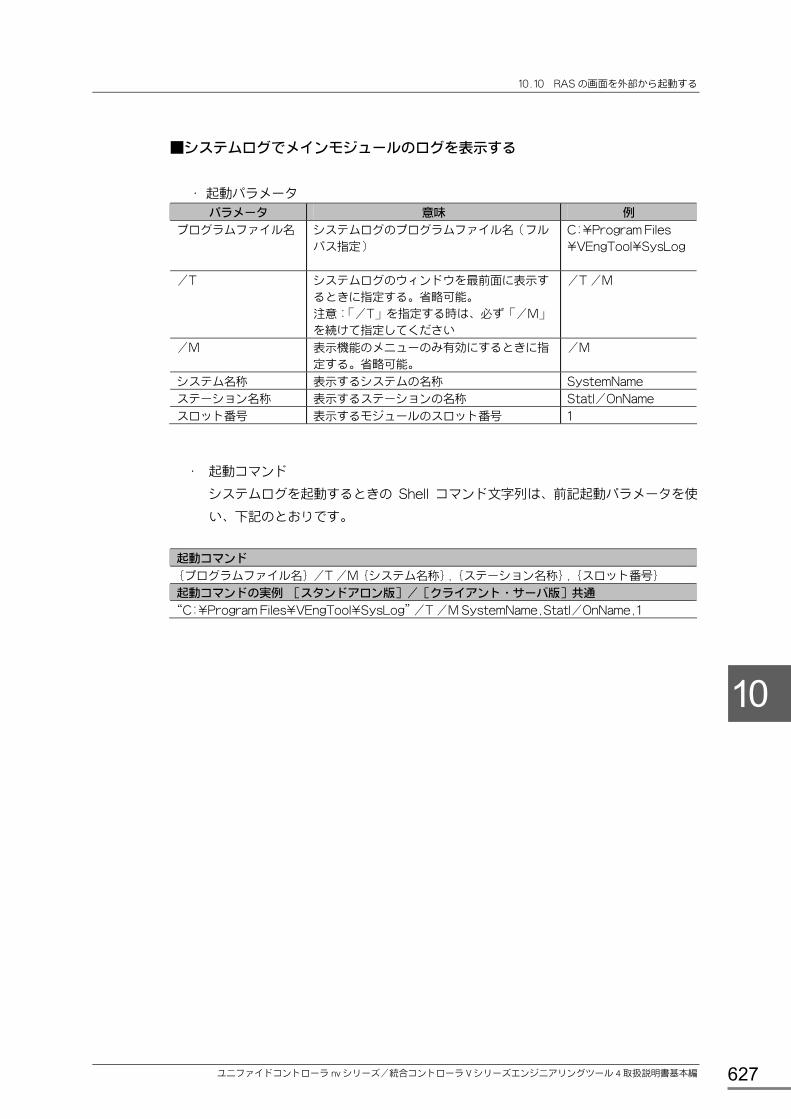
10.10 RAS の画面を外部から起動する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 627
■システムログでメインモジュールのログを表示する
・ 起動パラメータ
パラメータ 意味 例
プログラムファイル名 システムログのプログラムファイル名(フルパス指定)
C:\Program Files \VEngTool\SysLog
/T システムログのウィンドウを 前面に表示するときに指定する。省略可能。 注意:「/T」を指定する時は、必ず「/M」を続けて指定してください
/T /M
/M 表示機能のメニューのみ有効にするときに指定する。省略可能。
/M
システム名称 表示するシステムの名称 SystemName
ステーション名称 表示するステーションの名称 StatI/OnName
スロット番号 表示するモジュールのスロット番号 1
・ 起動コマンド
システムログを起動するときの Shell コマンド文字列は、前記起動パラメータを使
い、下記のとおりです。
起動コマンド
{プログラムファイル名} /T /M {システム名称}, {ステーション名称}, {スロット番号}
起動コマンドの実例 [スタンドアロン版]/[クライアント・サーバ版]共通 “C:\Program Files\VEngTool\SysLog” /T /M SystemName,StatI/OnName,1

第 10 章 V シリーズのシステムのモニタと保守
6E8C4890 628

629
第 11 章 ツールの保守 ここでは、エンジニアリングツールのシステム管理者の方を主な対象に、メンテナンスの
方法について説明します。
ツールのメンテナンス項目は、次のものがあります。実行順序は自由ですので、必要な時
に適宜おこなってください。
11.1 ユーザシステムのインポート/エクスポートを実行する··········630
11.2 ライブラリのインポート/エクスポートを実行する ·················633
11.3 テキスト形式によるインポート/エクスポートを実行する ······638
11.4 Ver.1 からプロダクトをインポートする ···································648
11.5 セミグラフィックからフルグラフィックへ一括変換する··········650
11.6 エンジニアリングログ·································································652
11.7 ログインユーザや現在の編集者を表示する································653

第 11 章 ツールの保守
6E8C4890 630
11.1 ユーザシステムのインポート/エクスポートを実行する
ユーザシステムをシステムフォルダ単位で、インポート(入力)/エクスポート(出
力)する方法について説明します。
インポート機能、およびエクスポート機能を使用することで、異なる PC 間でのシス
テム単位での交換作業が可能となります。
■使用可能メディア
書き込み可能なメデイアであれば、容量を満たす限り、種類は問いません。
■インポートの起動
1) [プロダクトツリー]の左上でシステムを選択し、メニュー<ファイル><インポ
ート>を選択します。
インポートの実行
1) [インポート]においてインポートするファイル、インポート先システムを選択し
ます。
ドライブ,フォルダ,ファイル : システムのエクスポートで作成したファイルの格
納されたドライブ,フォルダとファイル名を選択
します。
インポート先のシステム名 : インポート先のシステム名を入力します。

11.1 ユーザシステムのインポート/エクスポートを実行する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 631
2) 必要に応じて画面上で上記のインポート条件を設定後、[インポート]ボタンを押して
インポートを実行します。
3) 実行中はプログレスバーにより進捗表示されます。
4) 以降、表示されるダイアログにしたがって操作します。
■エクスポートの起動
1) [プロダクトツリー]の左下で、エクスポートするシステムを選択し、メニュー<
ファイル><エクスポート>を選択します。
エクスポートの実行
1) [エクスポート]においてエクスポート先のファイルを指定します。
ドライブ,フォルダ :エクスポート先のドライブ,フォルダを選択します。
ファイル名 :エクスポート先のファイル名を入力します。

第 11 章 ツールの保守
6E8C4890 632
2) [エクスポート]ボタンを押すと、言語種別を選択する画面が表示されます。
エクスポートした後に、別の言語種別のツール(例:VTool2 英語版)でインポー
トする場合は、ここで目的の言語種別を指定します。
3) 実行中はプログレスバーにより進捗表示されます。
4) 以降、表示されるダイアログにしたがって操作します。

11.2 ライブラリのインポート/エクスポートを実行する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 633
11.2 ライブラリのインポート/エクスポートを実行する
ユーザライブラリをインポート(入力)/エクスポート(出力)する方法について説
明します。
<ライブラリ>のインポート/エクスポートは、下記の項目について行います。
・ユーザ定義型単位またはその複数のインポート・エクスポート
・ユーザプログラム単位またはその複数のインポート・エクスポート
インポート機能、およびエクスポート機能を使用することで、異なる PC 間またはシ
ステム間でのユーザ定義型、ユーザプログラム、またはユーザライブラリ単位での交換
作業が可能となります。
■使用可能メディア
書き込み可能なメデイアであれば、容量を満たす限り、種類は問いません。
■インポートの起動
1) プロダクトツリーの左下でライブラリを選択し、メニュー<ファイル><インポー
ト>を選択します。
■インポートの実行
1) [ライブラリインポート]においてインポートするファイル、インポート先ファイ
ルを選択します。

第 11 章 ツールの保守
6E8C4890 634
ドライブ,フォルダ,ファイル: ライブラリのエクスポートで作成したファイルの格納され
た、ドライブ,フォルダとファイル名を選択します。
インポート先のライブラリ名: インポート先のライブラリ名を入力します。
偶数アドレス強制: 構造体のメンバの配置を変更してインポートする場合に使用しま
す。
TYP ファイルを選択してユーザ定義型(構造体)をインポートする場合のみ表示さ
れます。
・ [偶数アドレス強制]の[しない]をクリックすると、メンバは隙間無く配置されます。
・ メンバの配置を元に戻す場合は、[偶数アドレス強制]の[する]をクリックします。
●注記
・ [偶数アドレス強制]で[しない]を選択すると、構造体メンバに REAL,DINT,DWORD 等 2 バイトを
超えるデータ型やそれを含む構造体のデータ型を持つ場合に限り、ネットワークまたはステーション変数ではデー
タの同時性が確保できなくなります。
2) 必要に応じて画面上で上記のインポート条件を設定後、[インポート]ボタンを押して
インポートを実行します。
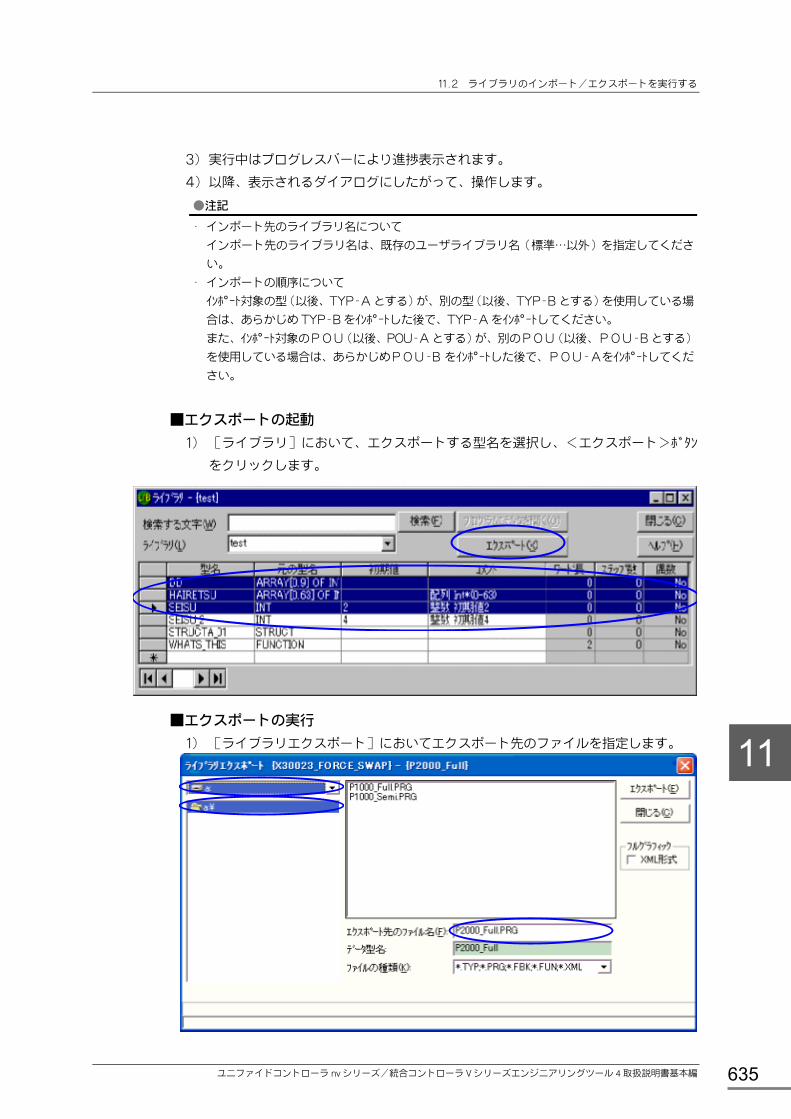
11.2 ライブラリのインポート/エクスポートを実行する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 635
3) 実行中はプログレスバーにより進捗表示されます。
4) 以降、表示されるダイアログにしたがって、操作します。
●注記
・ インポート先のライブラリ名について
インポート先のライブラリ名は、既存のユーザライブラリ名(標準…以外)を指定してくださ
い。
・ インポートの順序について
インポート対象の型(以後、TYP-A とする)が、別の型(以後、TYP-B とする)を使用している場
合は、あらかじめ TYP-B をインポートした後で、TYP-A をインポートしてください。
また、インポート対象のPOU(以後、POU-A とする)が、別のPOU(以後、POU-B とする)
を使用している場合は、あらかじめPOU-B をインポートした後で、POU-Aをインポートしてくだ
さい。
■エクスポートの起動
1) [ライブラリ]において、エクスポートする型名を選択し、<エクスポート>ボタン
をクリックします。
■エクスポートの実行
1) [ライブラリエクスポート]においてエクスポート先のファイルを指定します。

第 11 章 ツールの保守
6E8C4890 636
ドライブ,フォルダ: エクスポート結果を格納するドライブ,フォルダを選択します。
エクスポート先のファイル名: エクスポート結果を保存するファイル名を入力します。
フルグラフィックの出力形式の指定:通常形式、XML 形式で出力するかを選択します。
エンジニアリングツール2ではフルグラフィック言語はサポートしていませんので、
このチェックボックスは表示されません。
2) 必要に応じて画面上で上記のエクスポート条件を設定後、[エクスポート]ボタンを押
してエクスポートを実行します。
3) 実行中はプログレスバーにより進捗表示されます。
4) 以降、表示されるダイアログにしたがって操作します。
●注記
・ エクスポート先のファイル名について
ファイル名が重複している時など、エクスポート先のファイル名を変更する時には拡張子(.TYP、PRG、FBK、
FUN)は変えないでください。変えるとデータ型の判別が正常にできなくなり、インポートができな
くなります。

11.2 ライブラリのインポート/エクスポートを実行する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 637
■ユーザ定義型のエクスポートフォーマットについて
構造体等のユーザ定義型におけるメンバのアドレス情報(ワード No.、ビット No.、ワ
ード長)は、以下のようにコメントとして出力されます。
TYPE
SPC:STRUCT WRDIA:REAL; (*Work Roll Diameter. (m)*)(*0,0,2*) PAI:REAL; (*Circular Constant*)(*2,0,2*) GEAR:REAL; (*Gear Ratio*)(*4,0,2*) RT:REAL; (*SPC Rate (m/s2)*)(*6,0,2*) K:REAL; (*SPC APC Gain K*)(*8,0,2*) ACR:REAL; (*SPC Accuray*)(*10,0,2*) SEL:BOOL; (*Striker One Select Flag*)(*12,0,1*) END_STRUCT;
END_TYPE
・太字が第 2 コメント(メンバのアドレス情報)。
・第 2 コメントにおいて左から順に、'ワード No.'、'ビット No.'、'ワード長'。
第 11 章 ツールの保守
6E8C4890 638
11.3 テキスト形式によるインポート/エクスポートを実行する
ユーザプロダクトを1ネットワーク単位、または1ステーション単位で、テキスト形式
によりインポート(入力)/エクスポート(出力)する方法について説明します。
スト形式でのインポート機能、およびエクスポート機能を使用することで、テキスト形
式のデータを扱うことが可能なユーザの上位 Case ツールとの連携や、外部の市販ソフ
トウェアを活用した効率的なデータ編集を行うことが可能となります。
■対象プロダクト
・ユーザの I/O 変数(スキャンデータを含む)
・ユーザのグローバル変数
・ユーザのタスクエントリ、POU エントリ
・ユーザのハードウェア構成
・ユーザのハードウェアパラメータ
なお、以下は本機能の対象ではありません。ユーザライブラリのインポート・エクスポ
ート機能をご利用ください。
・ユーザの POU
・ユーザのデータ型
■使用可能メディア
書き込み可能なメデイアであれば、容量を満たす限り、種類は問いません。
フロッピィディスク(FD)を使用したデータの受け渡しなどの場合に、圧縮・分割ファ
イル形式(*.P00)を使用することもできます。
■インポートの用途
インポート機能では、対象となるプロダクトおよびその登録と指定内容の違いにより、
インポート後の結果が異なります。その違いについて以下に説明します。
・ プロダクトの追加
既存の登録がないプロダクトを新規に追加する機能です。
・ プロダクトの変更
既存の登録があるプロダクトに対して登録内容を変更する機能です。
・ プロダクトの更新
初期の状態があるプロダクトに対して登録内容を更新する機能です。
(初期化の意味での削除も可能です。)

11.3 テキスト形式によるインポート/エクスポートを実行する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 639
なお、新規に追加されたプロダクトの削除はできません。既存の登録内容から削除が必
要な場合は、インポートを実行する前にプロダクトツリーや登録画面において予め該当
プロダクトの削除をしておいてください。
対象プロダクト毎の違いは、以下のとおりです。
1)ネットワーク情報
1-1)LAN ノード構成
・追加:既存のノード登録がない場合は新規に追加できます。
・変更:できません。既に同一機種が登録されている場合は何も変更されません。
1-2)送信ブロック
・更新:出力ブロック番号を指定して登録内容を更新できます。初期化も可能で
す。
1-3)ネットワーク変数
・追加:既存の登録がない変数を新規に追加できます。
・変更:既に登録済みの変数のデータ型を変更することができます。
・更新:既に登録済みの変数のコメントのみを更新できます。初期化も可能です。
2)ステーション情報
2-1)ハードウェア構成
・追加:既存のハードウェア登録がない場合は新規に追加できます。
・変更:互換性のある一部の機種の名前(Catcode)を変更することができます。
・対象 Catcode についてはプロダクトツリーの「名前の変更」の章を参照して
ください。
2-2)ハードウェアのパラメータ、ポイントパラメータ
・更新:既存ハードウェアパラメータのアイテム ID を指定して登録内容を更新で
きます。
2-3)ステーション変数
・追加:既存の登録がない変数を新規に追加できます。
・変更:既に登録済みの変数のデータ型を変更することができます。
・更新:既に登録済みの変数のコメントのみを更新できます。初期化も可能です。
2-4)コントローラ変数
・追加:既存の登録がない変数を新規に追加できます。
・変更:既に登録済みの変数のデータ型を変更することができます。
・更新:既に登録済みの変数のコメントと値のみを更新できます。初期化も可能
です。
2-5)タスクエントリ
・更新:エントリ番号を指定して登録内容を更新できます。初期化も可能です。
2-6)POU エントリ
・更新:エントリ番号を指定して登録内容を更新できます。初期化も可能です。

第 11 章 ツールの保守
6E8C4890 640
■インポートの起動
1) プロダクトツリーの左下で<ネットワーク>、または<ステーション>を選択し、
メニュー<ファイル><インポート>を選択します。
■インポートの実行
1) [テキスト形式インポート]においてインポートするファイルを選択します。
ドライブ,フォルダ,ファイル: 作成したテキストファイルの格納された、ドライブ,フォ
ルダとファイル名を選択します。
2) 必要に応じて画面上で上記のインポート条件を設定後、[インポート]ボタンを押して
インポートを実行します。
3) 実行中はプログレスバーにより進捗表示されます。
4) 以降、表示されるダイアログにしたがって、操作します。
●注記
・ テキストの内容はインポート前に事前チェックを実施します。事前チェックにおいて指定内容
に不整合があることを検出した場合は、そのエラー内容をログテキストに出力し、正常な指定
内容も含めインポートは行いません。インポートが正常に完了しなかった場合は、ログテキス
トの内容を確認し、テキスト内の不整合を修復した後に再度インポートを実行してください。
(事前チェック機能は、V2.8.0 以降にてサポートしています。)

11.3 テキスト形式によるインポート/エクスポートを実行する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 641
■エクスポートの起動
1) プロダクトツリーの左下で対象の1ネットワーク、または1ステーションを選択し、
メニュー<ファイル><エクスポート>を選択します。
■エクスポートの実行
1)[テキスト形式エクスポート]においてエクスポート先のファイルを指定します。
ドライブ,フォルダ: エクスポート結果を格納するドライブ,フォルダを選択します。
エクスポート先のファイル名: エクスポート結果を保存するファイル名を入力します。
2) 必要に応じて画面上で上記のエクスポート条件を設定後、[エクスポート]ボタンを押
してエクスポートを実行します。
3) 実行中はプログレスバーにより進捗表示されます。
4) 以降、表示されるダイアログにしたがって操作します。

第 11 章 ツールの保守
6E8C4890 642
■テキストフォーマット(サンプル)
複数の CSV 形式のテーブルを 1 ファイルに格納するために、@Net, @End_Net など
のキーワードを使用します。
1)ネットワークの場合
@Net
(* NetNo,Catcode *)
"1","TC-net 100LAN"
@LanConfig
(* NodeNo,StatI/OnName,HAddress,Catcode *)
"1","StatI/On1","03-**-**-**","TN721"
"2","StatI/On1","04-**-**-**","TN721"
@End_LanConfig
@SysBlocks
(* BlockNo,TopWordNo,BlockWSize,Speed,OutNodeNo,
OutCntSlot *)
"0","0","64","1","1","1"
"1","0","64","1","2","1"
"2","0","64","1","",""
"2046","0","64","1","",""
"2047","0","64","1","",""
@End_SysBlocks
@SysVarsOut
(* lockNo,I/OW,Variavle,Datatype,Comment,Speed,WordNo,
BitNo,StatI/OnName,HAddress *)
"0","","BIT1","BOOL","","0","0","0","",""
"0","","BIT2","BOOL","","0","0","1","",""
"0","","REG1","WORD","","0","1","0", "",""
"0","","REG2","INT","","0","2","0","",""
@End_SysVarsOut
@SysVarsIn
(* Variable,InNodeNo,InCntSlot *)
@End_SysVarsIn
@End_Net

11.3 テキスト形式によるインポート/エクスポートを実行する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 643
2)ステーションの場合
@Stn
(* Name,Catcode *)
"StatI/On1","model 3000"
@HardsConfig
(* HAddress,Catcode *)
"**-**-**-**","BU746"
"01-**-**-**","S3PU55"
"03-**-**-**","TN721"
"04-**-**-**","TN721"
"10-**-**-**","AD338"
@End_HardsConfig
@ModulesPara
(* HAddress,OrderNo,cItemID,Value *)
"01-**-**-**","1","3225","0"
"01-**-**-**","2","3233","1"
"04-**-**-**","38","3080","0"
@End_ModulesPara
@PointsPara
(* HAddress,OrderNo,cItemID,Value,PointNo *)
"03-**-**-**","1","3504","0","0"
"03-**-**-**","2","3501","0","0"
"04-**-**-**","7","3506","0","127"
@End_PointsPara
@StnVarsOut
(*
HAddress,I/OW,Variable,Datatype,Comment,Speed,OutCntSlot,WordNo,
BitNo,IQNo *)
"01-**-**-**","","S_000","INT","","0","1","553984","0", ""
"01-**-**-**","","S_001","UINT","","0","1","553985","0, ""
"01-**-**-**","","S_002","DINT","","0","1","553986","0, ""
"01-**-**-**","","S_003","REAL","","0","1","553988","0, ""
"10-**-**-**","0","AID000","INT","","0","1","546548","0, ""
"10-**-**-**","1","AID001","INT","","0","1","546549","0, ""
"10-**-**-**","7","AID007","INT","","0","1","546555","0, ""
@End_StnVarsOut
@StnVarsIn
(* Variables,InCntSlot *)
@End_StnVarsIn

第 11 章 ツールの保守
6E8C4890 644
@CntBlocks
(* HAddress,Name *)
"01-**-**-**","SW"
"01-**-**-**","DW"
"01-**-**-**","User"
@CntVars
(*
HAddress,Name,I/OW,Variable,Datatype,Value,Comment,Speed,Const,
WordNo,BitNo *)
"01-**-**-**","User","","G000","INT","0","","0","0","0","0"
"01-**-**-**","User","","G001","UINT","0","","0","0","1","0"
"01-**-**-**","User","","G006","STR_A","","","0","0","7","0"
"01-**-**-**","User","","G009","ARRAY[0..3] OF
WORD","","","0","0","20","0"
@End_CntVars
@CntValues
(* HAddress,VarMember,Datatype,Value *)
"01-**-**-**","G009[0]","WORD","1111"
"01-**-**-**","G009[1]","WORD","2222"
"01-**-**-**","G009[2]","WORD","3333"
"01-**-**-**","G009[3]","WORD","4444"
@ End_CntValues
@End_CntBlocks
@PouEntries
(* HAddress,PouNo,Datatype *)
"01-**-**-**","2048","MS000"
"01-**-**-**","2049",""
"01-**-**-**","2964",""
@End_PouEntries
@TaskEntries
(*
HAddress,TaskName,TaskEntryNo,Datatype,Comment,Enabled,Sch,Grp *)
"01-**-**-**","EV","0","","","0","0","0"
"01-**-**-**","EV","7","","","0","0","0"
"01-**-**-**","SS","0","","","0","0","0"
"01-**-**-**","IP","0","","","0","0","0"
"01-**-**-**","IP","7","","","0","0","0"

11.3 テキスト形式によるインポート/エクスポートを実行する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 645
"01-**-**-**","HS","0","","","0","0","0"
"01-**-**-**","HS","127","","","0","0","0"
"01-**-**-**","MS","0","MS000","","0","0","0"
"01-**-**-**","MS","255","","","0","0","0"
"01-**-**-**","BG","0","","","0","0","0"
"01-**-**-**","BG","3","","","0","0","0"
@TaskParams
(*
HAddress,TaskName,TaskEntryNo,No,Variable,dDatatype,dComment *)
@End_TaskParams
@End_TaskEntries
@End_Stn
■テキストフォーマット(補足説明)
1) ネットワーク情報
1-1) リモート I/O ステーションの I/O 変数については、ネットワーク変数
(@SysVarsOut)の情報として扱われます。
なお、リモート I/O ステーションの I/O 出力の変数は、TC-net 100 上の受
信側(@SysVarsIn)の指定がなくてもインポートすることができます。受信
側は自動的に割付けされます。自動割付の対象は、一般 I/O の I/O 出力変数、
およびフィールドネットワーク(TL-S20 等)の出力変数です。
1-2) ネットワーク変数(@SysVarsOut)において、アドレス(WordNo,BitNo)
のインポート時の指定方法は以下のとおりです。
新規に自動取得する場合: WorNo,BitNo の指定をしない。つまりフィール
ドを、長さ0の文字列(例:””)とする。
ユーザ指定をする場合: WordNo,BitNo を指定する。つまりフィールドに、
数値(例:”10000”)を指定する。
なお、新規取得とユーザ指定が混在する場合には、アドレス指定された変数、
および指定のない変数をまとめた上でアドレス指定有りの分を上に、アドレス
指定無しの分にしてください。アドレス指定有無に関係なく、テキストデータ
の上から順にインポートするため、逆にした場合にはアドレスが重複してしま
うことがあります。
1-3) ネットワーク変数(@SysVarsOut/@SysVarsIn)において、I/O コネクシ
ョンはすべて自動割り付けされるため、インポート時の IQNo の指定はありま
せん。

第 11 章 ツールの保守
6E8C4890 646
1-4) ネットワーク変数(@SysVarsOut)において、対象コントローラの指定
(StatI/OnName,HAddress)は RI/O コントローラ専用の情報です。一般
のコントローラでは指定不要のため、フィールドを、長さ0の文字列(例:””)
としてください。
1-5) ネットワーク変数(@SysVarsOut)において、I/O エリア(I/OA)と I/O
タイプ(I/OP)は MELPLAC I/O 用の RI/O コントローラ専用の情報です。
他のコントローラでは指定不要のため、フィールドを、長さ0の文字列(例:””)
としてください。I/OA と I/OP の指定方法については、「MELPLAC I/O 用
情報」を参照してください。
2) ステーション情報
2-1) 一般の I/O 変数ついては、基本ユニットでのシステムバスの有無によりステ
ーション変数(@StnVarsOut)、またはコントローラ変数(@CntVars)の
情報として扱われます。
2-2) ステーション変数(@StnVarsOut)、およびコントローラ変数(@CntVars)
において、アドレス(WordNo,BitNo)のインポート時の指定方法は以下のと
おりです。
新規に自動取得する場合:WorNo,BitNo の指定をしない。つまりフィールド
を、長さ0の文字列(例:””)とする。
ユーザ指定をする場合: WordNo,BitNo を指定する。つまりフィールドに、
数値(例:”10000”)を指定する。
なお、新規取得とユーザ指定が混在する場合には、アドレス指定された変数、
および指定のない変数をまとめた上でアドレス指定有りの分を上に、アドレス
指定無しの分にしてください。アドレス指定有無に関係なく、テキストデータ
の上から順にインポートするため、逆にした場合にはアドレスが重複してしま
うことがあります。

11.3 テキスト形式によるインポート/エクスポートを実行する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 647
2-3) ステーション変数(@StnVarsOut/@StnVarsIn)において、IQNo フィー
ルドのインポート時の扱いは以下のとおりです。
自動割り付け: 数値が指定されている、または、長さ0の文字列("")を指
定すると IQNo を自動割付する。
IQNo を割り付けない: 予約語("(None)")を指定する。
予約語を指定した場合、IQNo は無し(Null)となります。なお、予約語はエクスポー
ト時も使用されます。
・MELPLAC I/O 用情報
それぞれ、以下に示す番号で指定してください。
1) I/O エリア(I/OA)
1:入力エリア、2:出力エリア、3:カウンタ、4:システムエリア、5:CH1 入出力エリア、6:CH2 入出力エリ
ア、7:CH3 入出力エリア、8:CH4 入出力エリア、9:コマンドエリア、10:ローカルエラーフラグ、11:入力
エリア 1、12:入力エリア 2、13:出力エリア 1、14:出力エリア 2、15:CH0 エリア、16:CH1 エリア、
17:リモート STN エラー、18:リファレンスデータ、19:フィードバックデータ、20:コントロールエリア、21:特殊リレ
ー、22:特殊レジスタ、23:LX 前半、24:LY 前半、25:LB 前半、26:LW 前半、27:LX
後半、28:LY 後半、29:LB 後半、30:LW 後半、31:X、32:Y、33:B 前半、34:W
前半、35:B 後半、36:W 後半、37:ステータス/コマンドエリア、38:サイクリック入力エリア、39:サイク
リック出力エリア、40:サイクリックエリア、41:ステータスエリア、42:CYC 通信 IN エリア、43:CYC 通信
OUT エリア、44:位置検出、45:SW エリア
2) I/O タイプ(I/OP)
2:一括入力、3:一括出力

第 11 章 ツールの保守
6E8C4890 648
11.4 Ver.1 からプロダクトをインポートする
エンジニアリングツール Ver.1 のプロダクトを、エンジニアリングツール2以降で
使用するためにはデータの変換が必要です。
ここでは、エンジニアリングツール Ver.1 のプロダクトをインポートする手順につ
いて、システム管理者の方を対象に説明します。
■インポートの起動(エンジニアリングツール2の場合)
1) スタートメニューから<プログラム><V シリーズ エンジニアリングツール2(管
理用)><Ver.1 インポート>を選択します。
■インポートの実行

11.4 Ver.1 からプロダクトをインポートする
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 649
1) Ver.1 システムの選択
[Ver.1 のシステムフォルダ]で、Ver.1 のインポート対象システムを選択します。
2) インポート先の選択
[Ver.2 のシステムフォルダ]でインポート先のシステムを選択します。新規シス
テムへインポートする場合は、[プロダクトツリー]にて、あらかじめ新規システム
を作成してください。
3) インポート開始
[開始]ボタンを選択してください。インポートを実行します。
■制約事項
・ Ver.1 システムのプログラムで、’標準ファンクション(タグ介入)’の’PB_P’を使
用していた場合は、インポート後に Ver.2 の[プログラムエディタ]で該当のファ
ンクションを削除後、再描画してください。
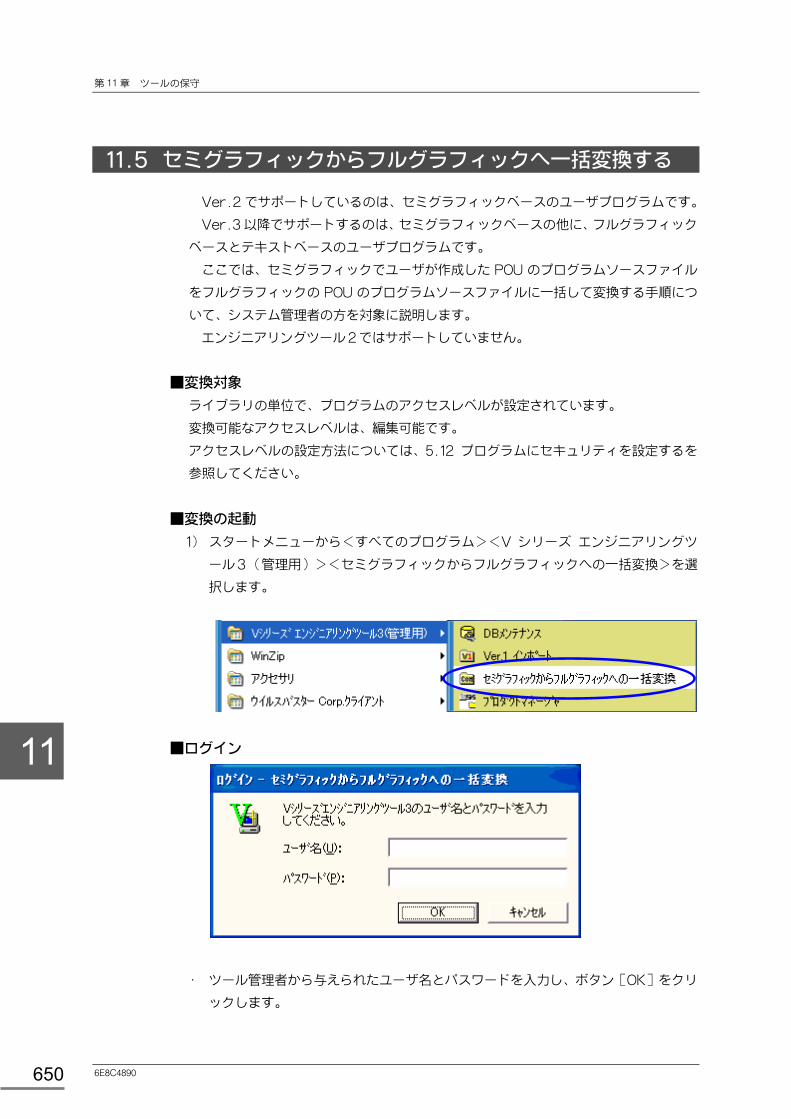
第 11 章 ツールの保守
6E8C4890 650
11.5 セミグラフィックからフルグラフィックへ一括変換する
Ver.2 でサポートしているのは、セミグラフィックベースのユーザプログラムです。
Ver.3 以降でサポートするのは、セミグラフィックベースの他に、フルグラフィック
ベースとテキストベースのユーザプログラムです。
ここでは、セミグラフィックでユーザが作成した POU のプログラムソースファイル
をフルグラフィックの POU のプログラムソースファイルに一括して変換する手順につ
いて、システム管理者の方を対象に説明します。
エンジニアリングツール2ではサポートしていません。
■変換対象
ライブラリの単位で、プログラムのアクセスレベルが設定されています。
変換可能なアクセスレベルは、編集可能です。
アクセスレベルの設定方法については、5.12 プログラムにセキュリティを設定するを
参照してください。
■変換の起動
1) スタートメニューから<すべてのプログラム><V シリーズ エンジニアリングツ
ール3(管理用)><セミグラフィックからフルグラフィックへの一括変換>を選
択します。
■ログイン
・ ツール管理者から与えられたユーザ名とパスワードを入力し、ボタン[OK]をクリ
ックします。

11.5 セミグラフィックからフルグラフィックへ一括変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 651
■変換の実行
1) システムの選択
[システムフォルダ]で、フルグラフィックへの変換対象システムを選択します。
2) 変換開始
[開始]ボタンを選択してください。変換を実行します。

第 11 章 ツールの保守
6E8C4890 652
11.6 エンジニアリングログ
ツールまたは、コントローラに対する変更操作の記録をログファイルに出力し画面に
表示します。
■エンジニアリングログの表示
1) プロダクトツリーからメニュー<ファイル><エンジニアリングログの表示>を選択します。
エンジアリングログがメモ帳で表示されます。
ログは、以下のフォルダに V2EngLog.txt という名前で保存されます。
サーバ PC(スタンドアロンを含む):OS の Windows フォルダ(¥Winnt,¥Windows
等)。
クライアント PC:OS の Temp フォルダ(¥Temp 等)。
■記録する件数の変更
1) Windows のシステムフォルダ(¥Winnt)内の V2Tool.INI ファイルをメモ帳で開
きます。
C/S 版の場合は、サーバ PC で操作してください。
2) OpeLogSize の項目の値を変更します。
設定する値は、以下を目安にしてください。
設定値 記録できる件数
100(既定値) 約900
300 約2800
●注記
・ 1000以上の大きな値は、設定しないでください。
注意:V2Tool.INI ファイルの他の項目は変更しないでください。変更した場合、エンジニアリン
グツールが正常に動作しなくなります。
例)記録する件数を約2800件に設定する場合
OpeLogSize=300
3) V2Tool.INI ファイルを保存します。
設定された値は、次回の起動時から有効になります。
エンジニアリングツールのセットアップをすると、この設定は初期値に戻ります。その場合は、
もう一度この設定を行ってください。

11.7 ログインユーザや現在の編集者を表示する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 653
11.7 ログインユーザや現在の編集者を表示する
クライアント/サーバ版では、「今、誰がログインしているのか」「今、誰がどのプロ
ダクトを編集しているのか」を知りたい場合があります。それは特にサーバ PC をシャ
ットダウンするときに必要になります。ここでは、その表示方法と内容を説明します。
■「現在の編集者」を開く
・ プロダクトツリーのメニュー<ファイル><現在の編集者>をクリックして、以下
のフォームを開きます。
各フィールドの意味は次のとおりです。
・ 編集者 :V-Tool のログインユーザの中で、現在編集中のユーザ名を表
示。[ ]は PC 名。
・ システム :編集中のプロダクトのシステム名を表示。
・ ステーション :編集中のプロダクトのステーション名を表示。
・ コントローラ :編集中のプロダクトのコントローラ名を表示。[ ]はメインス
ロット番号。
・ プロダクト :編集中のプロダクト名。下表に従って表示されます。

第 11 章 ツールの保守
6E8C4890 654
[プロダクト]の表示文字
ネットワーク
ステーション
ユニット
モジュール
バス
モジュール
{POU 名} :Note1
{タスク名} :Note2
{タスクエントリ名} :Note3
ネットワーク変数
ステーション変数
コントローラ変数
{型名} :Note4
ライブラリ
変数宣言
インタロック診断
シンクロトレンド
Note1:{POU 名}. ユーザが付けた POU の名前を表示。
Note2:{タスク名}. “HS”,”MS”のようにタスクの略号を表示。
Note3:{タスクエントリ名}. “HS007”と”MS125”のようにタスク名とタスクエン
トリ番号を表示。
Note4:{型名}. ユーザが定義した構造体の型名を表示。
ログインユーザ :現在、V-Tool にログイン中のユーザ名を表示。
クライアント PC :現在、V-Tool にログイン中の PC 名を表示。
IP アドレス :現在、V-Tool にログイン中の PC の持つ IP アドレスを列挙。
・ 各フィールドの見出しをクリックすると、そのフィールドの値でソートできます。
クリックする度に、昇順、降順が切り替わります。
・ ボタン[更新]をクリックすると、すべての表示内容を更新します。
・ ボタン[閉じる]をクリックすると、このフォームを閉じます。
655
第 12 章 図書の印刷 エンジニアリングツールで作成した成果物を印刷する機能です。
印刷項目の指定やプレビューを行う事ができます。
印刷は、ドキュメント印刷とショット印刷の2つの方法があります。
ドキュメント印刷とは、ドキュメント印刷画面から行う各成果物の図書の印刷です。
対象システムまたはステーションを選択し、プロダクトツリーの<ファイル><印刷>か
ら起動します。
ショット印刷とは、それぞれのアプリケーションで、メンテナンスを目的に一時的に印刷
することを指します。
以下の項目で詳しく説明します。
12.1 ドキュメント印刷とショット印刷 ············································656
12.2 ページ設定 ·············································································657
12.3 印刷の実行 ·············································································667
12.4 クロスリファレンスの印刷 ·······················································672
12.5 変数リファレンス、関数リファレンスの印刷··························677
12.6 PDF ファイルに出力する ·························································680

第 12 章 図書の印刷
6E8C4890 656
12.1 ドキュメント印刷とショット印刷
以下にドキュメント印刷できるものとショット印刷できるものを示します。
■ドキュメント印刷できるもの
●システム
・ステーション一覧
・LAN 構成
・送信ブロックリスト
・ネットワーク変数リスト
●ステーション
・ハードウェア構成
・モジュールパラメータ
・ステーショングローバル変数リスト
・I/O コネクションリスト
・I/O 変数リスト
●コントローラ
・タグ No リスト
・タグパラメータ
・タスクリスト
・プログラム構成単位リスト
・プログラム構成単位
・変数・パラメータリスト
■ショット印刷できるもの
それぞれの画面にてメニューで印刷を選択したり、ボタンを押します。
●モジュールパラメータ
画面に表示している内容を印刷します。
●システムログ
エラー/イベント/介入/伝送ログを印刷します。
●シリアル I/O ログ
シリアル I/O のログを印刷します。
●タグエディタ
指定範囲のツールの値を印刷します。
●プログラムエディタ
以下の情報を印刷します
・プログラム
・ファンクションブロック
・ファンクション
・コンパイルエラーリスト

12.2 ページ設定
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 657
12
12.2 ページ設定
印刷する用紙の設定を行います。以下の2箇所から表示できます。
・ドキュメント印刷で、<ファイル><ページ設定>を選択します。
・プログラムエディタで、<ファイル><ページ設定>を選択します。
■余白の設定(セミグラフィックのプログラム専用)
用紙の上下左右の余白を設定します。各項目にミリ単位で設定します。

第 12 章 図書の印刷
6E8C4890 658
■用紙サイズの設定(セミグラフィックのプログラム専用)
用紙サイズと用紙の向きを設定します。
用紙サイズはA4とレターサイズが選択できます。
用紙の向きは縦と横が設定できます。
■ヘッダ・フッタの設定(セミグラフィックのプログラム専用)
ヘッダ・フッタをそれぞれ3行ずつ設定できます。
それぞれに任意の文字を入力することや以下の記号を入力する事ができます。

12.2 ページ設定
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 659
12
入力値 表示項目
%F ファイル名
%D 印刷日付
%T 印刷時刻
%P ページ番号
%A 総ページ数
%PA ページ番号/総ページ数
%C 客先名
%J JOB 名
%JNo JOBNo
%JJNo JOB 名[JOBNo]
%DNo DocNo
%RNo RevNo
%PN 製造社名
%CN 印刷項目名
%XRef クロスリファレンスヘッダ
また上記項目を同一場所に複数表示したい場合は以下のように";"で区切るように入力
します。
%D;%T(”印刷日付 印刷時刻”が表示さます)
また、一時的にヘッダ・フッタを印刷したくない場合は、ヘッダ・フッタ表示のチェッ
クを外してください。
■システム共通項目の設定
表紙やヘッダ・フッタに表示するシステム共通項目を設定できます。
<ファイル><システム共通項目設定>を選択します。
それぞれに任意の文字を 50 バイト以下で入力することができます。

第 12 章 図書の印刷
6E8C4890 660
■用紙の設定(フルグラフィックのプログラム専用)
以下の設定を変更することができます。
1) 用紙のサイズ(A4,A3,レター)
2) 用紙向き(縦,横)
3) 用紙の余白(上下左右)の大きさ
4) ヘッダ/フッタの位置
フッタは設定値 0 で適切な位置に自動的に文字を配置します。微調整したい場合に
変更してください。
○補足
・ 設定値によってヘッダ/フッタの文字が切れたり印字されない場合があります。
5) 印刷時のワークシートの拡大率
レイアウトファイルの使用方法については、’■印刷レイアウト’を参照してくださ
い。

12.2 ページ設定
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 661
12
■ヘッダ・フッタの設定(フルグラフィックのプログラム専用)
それぞれ3箇所(左・中央・右)に設定することができます。
設定できるのは以下のとおりです。
1) 場所(POU の位置)
2) 日付
3) ページ番号
4) ユーザ文字列(任意の文字列)
■その他の設定(フルグラフィックのプログラム専用)
第 12 章 図書の印刷
6E8C4890 662
[クロスリファレンスの表示]
クロスリファレンスの表示は以下の3種類が指定できます。
・クロスリファレンスなし
・簡易表示
・詳細表示(Row,Col あり)
○補足
・ 用紙が縦でもクロスリファレンスは印字されます。
[データ型の表示]
ドキュメント印刷にてデータ型を付加して印刷する場合にチェックします。
[実行順の印刷]
ドキュメント印刷にてステップ No.またはワークシート内の実行番号を付加して印刷
する場合に選択します。
[白黒印刷]
白黒で印刷する場合チェックします。
[セル位置の印刷]
ワークシート1枚を 1 枚の用紙に出力し、列番号(1,2,3…)をアルファベット(A,B,C
…)で印刷する場合にチェックします。
[端子を印刷しない]
シンボルの端子や、シンボルや線の接続点を印刷しない場合にチェックします。
[インスタンス変数名を印刷しない]
ファンクションブロックのインスタンス変数名(インスタンス名、ファンクションブロ
ック変数、とも言う)を印刷しない場合にチェックします。
■印刷レイアウト(フルグラフィックのプログラム専用)
印刷レイアウトとは、テキストやピクチャの情報をシート上で自由に配置して印刷する
機能です。
これにより、書式を指定した文字列や、ビットマップとしてあらかじめ準備した会社名
のロゴなどを、ヘッダ・フッタとして印刷することができます。また、’■ヘッダ・フ
ッタの設定’にて設定した情報との併用も可能です。
使用方法は、以下のとおりです。
1)印刷レイアウトエディタで、レイアウトファイルを作成する。
2)作成したレイアウトファイルを指定して使用する。
詳細は、’■印刷レイアウトの作成’、および’■印刷レイアウトの指定’を参照してく
ださい。

12.2 ページ設定
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 663
12
■印刷レイアウトの作成(フルグラフィックのプログラム専用)
・ 新規に作成する場合は、ページ設定画面にて、[レイアウト]ボタンを押して、 [印
刷レイアウトエディタ]を表示します。
・ 既存のレイアウトファイルを編集する場合は、レイアウトファイルをフルパスでキ
ー入力するか、[参照]ボタンを押して、表示されたダイアログ上でファイルを選択し
た後に、[レイアウト]ボタンを押してください。

第 12 章 図書の印刷
6E8C4890 664
印刷フォーマットがエディタ上に表示されます。ここで、すでに’■ヘッダ・フッタの
設定’にて設定した情報がある場合は、エディタ上に灰色の四角(■)として表示しま
す。
1) ツールアイコンの意味は次のとおりです。
削除
貼り付け
切り取り
コピー
上書保存
開く
新規
リドゥ
元に戻す
・ツールアイコン上にマウスを置くとその意味が表示されます。
・ツールアイコンの機能は、メニューでも用意されています。
2) ロゴ等のピクチャを設定する
・画面の右上にある[ロゴ]ボタンを押した後に、エディタ上で配置したい位置を
マウスでクリックします。
・ファイル選択ダイアログが表示されるので、ファイルを選択します。
指定できるファイル形式は、ビットマップ(.bmp)、アイコン(.ico)、JPEG
形式(.jpg)、GIF形式(.gif)です。
3) ロゴ等のピクチャを変更する
・配置されたピクチャの大きさを変更したいときは、ピクチャの端をマウスドラッ
グします。
・配置されたピクチャの位置を変更したいときは、ピクチャをマウスでドラッグ&
ドロップします。
・配置されたピクチャの内容を変更したいときは、メニュー<参照>を選択して表
示されるダイアログで、ファイルを再度指定します。
4) テキストを設定する
・画面のの右にある[テキスト]ボタンを押した後に、エディタ上で配置したい位
置をマウスでクリックします。
・配置されたテキストボックスをダブルクリックすると、テキストが入力可能とな
るので、文字を入力します。

12.2 ページ設定
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 665
12
5) テキストを変更する
・配置されたテキストボックスの大きさを変更したいときは、テキストボックスの
端をマウスドラッグします。
・配置されたテキストボックスの位置を変更したいときは、テキストボックスをマ
ウスでドラッグ&ドロップします。
・配置されたテキストボックスの内容を変更したいときは、再度テキストボックス
をダブルクリックして、文字を入力します。
・配置されたテキストボックスのフォントを変更したいときは、メニュー<書式>
<フォント>を選択して表示されるダイアログで、フォントを設定します。
6) テキストの配置を設定する
・テキストボックス内でのテキスト配置の初期値は”中央”です。
・テキストの配置を変更したいときは、メニュー<書式><テキストの配置>から
選択します。
7) 印刷フォーマットを拡大・縮小する。
・エディタに表示される印刷フォーマットのサイズの初期値は 100%です。
・印刷フォーマットの表示を、拡大・縮小したいときは、メニュー<表示><拡大
>から選択します。

第 12 章 図書の印刷
6E8C4890 666
■印刷レイアウトの設定(フルグラフィックのプログラム専用)
・ レイアウトファイル指定のテキストボックスに、レイアウトファイルのフルパスを
入力するか、[参照]ボタンにて、[ファイルを開く]ダイアログを表示して、既に作成
されているレイアウトファイルを選択します。
なお、’■ヘッダ・フッタの設定’にて設定した情報がある場合は、その情報とともに、
レイアウトファイルで指定した情報が印刷されます。
○補足
・ レイアウトファイルが指定されているとき、用紙サイズや用紙向きを変更したときは下記メッ
セージを表示してレイアウトファイル指定を削除します。

12.3 印刷の実行
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 667
12
12.3 印刷の実行
■印刷項目の設定
<メイン画面>
通常は画面上のチェックボックスでプロダクトの印刷を行なうか否かの設定を行いま
す。
項目で下位展開があるもの(項目名の頭に“+”)については、<表示><詳細>を実
行し、詳細ダイアログのチェックボックスで設定を行います。また下位展開項目全体に
ついてチェックのオン/オフを行なう場合は、その項目のチェックボックスをオン/オ
フします。
メイン画面から下位展開(詳細画面1を展開)できるものは以下のとおりです。
・ネットワーク変数リスト
・ステーション
・コントローラ
・データ型宣言
・関数リスト

第 12 章 図書の印刷
6E8C4890 668
<詳細画面1>
例)メイン画面からコントローラを選択して詳細を実行した場合
詳細画面1から、更に下位展開(詳細画面2を展開)できるものは以下のとおりです。
ステーションの詳細からは以下のとおりです。
・モジュールパラメータ
・ステーショングローバル変数リスト
・I/O コネクションリスト
コントローラの詳細からは以下のとおりです。
・プログラム構成単位
・変数・パラメータリスト
・タグバラメータ
タグパラメータの詳細は、以下の場合画面に表示されます。
1)タグ No を持っているパラメータの場合、タグ No が登録しているとき。(MCS 型
の LP は PVPNo が登録されており、且つタグ No を持っている PV と結びついてい
るとき)
2)タグ No を持っていないパラメータの場合、コメント等ダウンロードしない情報が
登録されているとき。

12.3 印刷の実行
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 669
12
<詳細画面2>
例)変数・パラメータリストを選択して詳細を実行した場合
印刷を行なう項目全体に対してチェックをする場合には<編集><すべてをチェック
する>を、チェックをはずす場合には<編集><チェックを解除する>を選択します。
プログラム構成単位ファイルの印刷表示オプションは<オプション><プログラム構
成単位>から選択します。
○補足
・ プログラム構成単位ファイルでのクロスリファレンス印刷は、セミグラフィックでは、回路を
12列以内で作成したファイルで、用紙向きを横に設定したときのみ行われます。
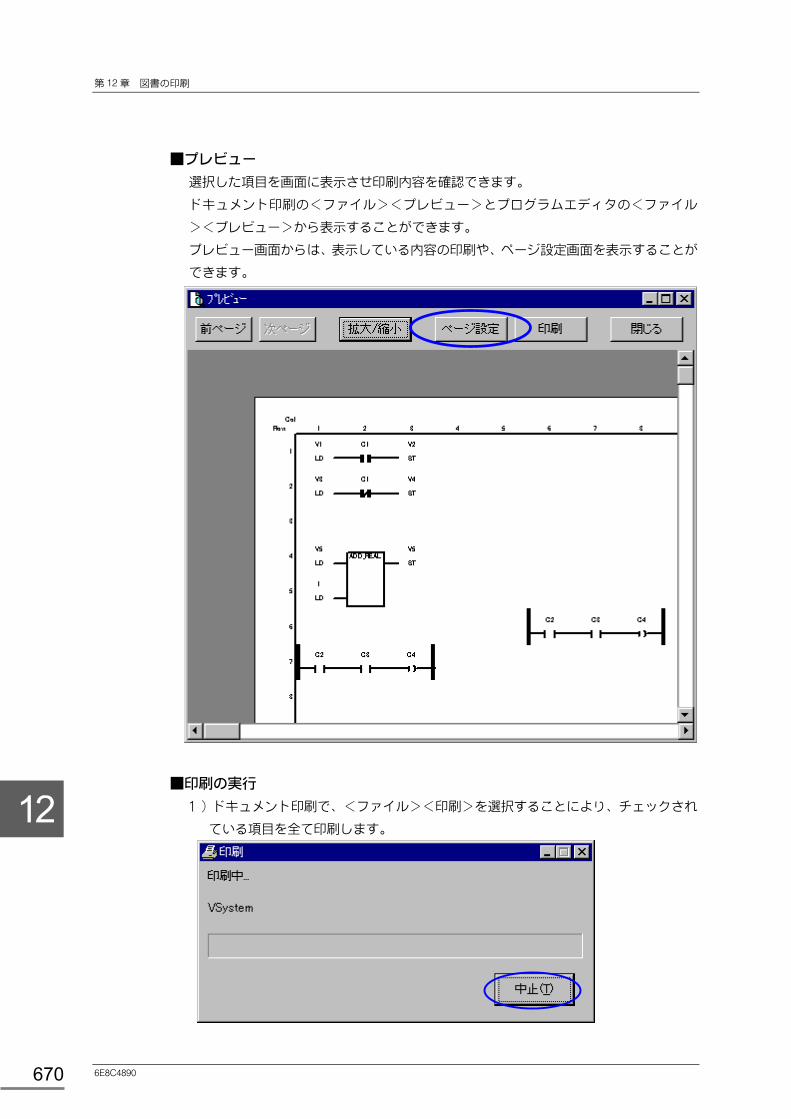
第 12 章 図書の印刷
6E8C4890 670
■プレビュー
選択した項目を画面に表示させ印刷内容を確認できます。
ドキュメント印刷の<ファイル><プレビュー>とプログラムエディタの<ファイル
><プレビュー>から表示することができます。
プレビュー画面からは、表示している内容の印刷や、ページ設定画面を表示することが
できます。
■印刷の実行
1)ドキュメント印刷で、<ファイル><印刷>を選択することにより、チェックされ
ている項目を全て印刷します。
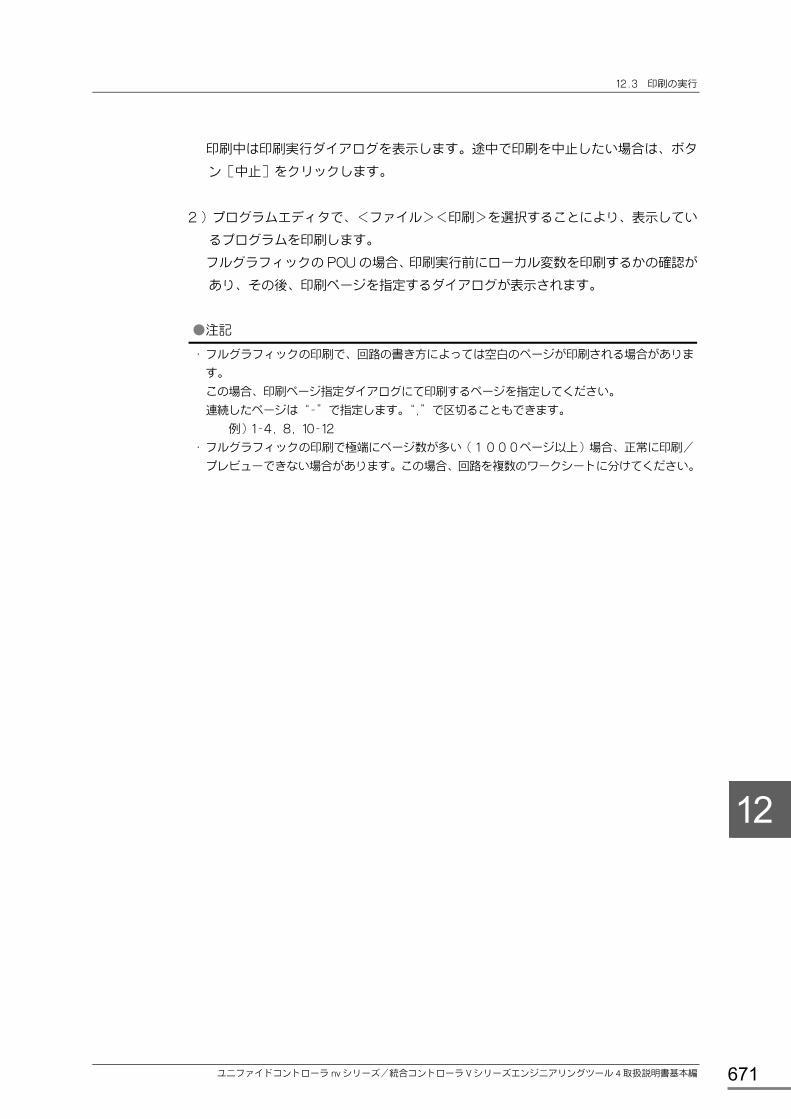
12.3 印刷の実行
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 671
12
印刷中は印刷実行ダイアログを表示します。途中で印刷を中止したい場合は、ボタ
ン[中止]をクリックします。
2)プログラムエディタで、<ファイル><印刷>を選択することにより、表示してい
るプログラムを印刷します。
フルグラフィックの POU の場合、印刷実行前にローカル変数を印刷するかの確認が
あり、その後、印刷ページを指定するダイアログが表示されます。
●注記
・ フルグラフィックの印刷で、回路の書き方によっては空白のページが印刷される場合がありま
す。
この場合、印刷ページ指定ダイアログにて印刷するページを指定してください。
連続したページは“-”で指定します。“,”で区切ることもできます。
例)1-4,8,10-12
・ フルグラフィックの印刷で極端にページ数が多い(1000ページ以上)場合、正常に印刷/
プレビューできない場合があります。この場合、回路を複数のワークシートに分けてください。

第 12 章 図書の印刷
6E8C4890 672
12.4 クロスリファレンスの印刷
クロスリファレンスとは、プログラム内の変数が
1)他の、どのプログラムのどこ(行・列)で
2)どのように使用されているのか(代入、参照、Set、Reset)
を知るためのリストです。
クロスリファレンスは、プログラムを同時に印字することができます。ここでは、そ
の操作方法を、クロスリファレンスの見方を説明します。
■プログラムとクロスリファレンスを同時に印刷する
プログラムエディタで<ファイル><ページ設定>を選択します。
ページ設定で「クロスリファレンス結果を印字する」が設定された状態で、プログラム
エディタの<ファイル><印刷>を選択して印刷が行なえます。

12.4 クロスリファレンスの印刷
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 673
12
■プレビュー
ページ設定で、クロスリファレンス結果を印刷するが指定されている時、クロスリファ
レンス結果の印刷イメージが確認できます。
プログラムエディタの<ファイル><プレビュー>で表示できます。
以下の画面プレビューからページ設定画面を表示させることができます。
回路部 :回路部で参照している変数の出力個所を表示します。
リファレンス部 :回路部で出力に使用される変数の参照(使用)個所を表示。
ページ設定で「詳細な位置(行・列)を印刷する」が指定される場合、行列までを表示
します。
ページ設定で用紙方向を縦に設定していたり、印刷する回路が 12 列を超える列に命令
語が存在した場合には、以下のメッセージが表示され、クロス付の印刷は行なえません。
リファレンス部 回路部

第 12 章 図書の印刷
6E8C4890 674
■クロスリファレンスの見方
回路部 リファレンス部
変数 リファレンス リファレンス 詳細リファレンス
ステーショングローバル (S:TEEE:PPP>)
S:TEEE:PPP>
S:TEEE:PPP>RRRRR:CC
コントローラグローバル (TEEE:PPP>)
TEEE:PPP>
TEEE:PPP>RRRRR:CC
ローカル (PPP>) PPP> PPP>RRRRR:CC
・記号の意味
記号 意味 種類
S スロット番号 -
T タスク種別 E:イベントタスク S:超高速タスク I :割り込みタスク H:高速スキャンタスク M:メインスキャンタスク B:バックグランドタスク
EEE タスク番号 -
PPP ページ番号 -
> アクション -:参照(Read) >:代入(Write) S :設定(Set) R :設定(Reset)
RRRRR 行番号 -
CCC 列番号 -

12.4 クロスリファレンスの印刷
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 675
12
・回路部のクロスリファレンス結果の見方
ユーザグローバルの出力先のリファレンス表示を示している。

第 12 章 図書の印刷
6E8C4890 676
・リファレンス部のクロスリファレンス結果の見方
ステーショングローバル SGC1 の参照先リファレンスを示している。

12.5 変数リファレンス、関数リファレンスの印刷
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 677
12
12.5 変数リファレンス、関数リファレンスの印刷
ここでは、変数のリファレンスと関数のリファレンスを印刷する方法について説明しま
す。
■変数リファレンスの印刷
ネットワーク、ステーション、コントローラの各変数について、どのステーションの、
どのコントローラの、どのプログラムの、どの場所で、どのように利用されているのか
を印刷します。
ドキュメント印刷で、メニュー<ファイル><ページ設定>を選択し、用紙の向きを
[横]に設定します。
メニュー<オプション><プログラム構成単位><変数リファレンス>を選択し、変数
リファレンスを印刷するスコープにチェックマークを設定します。

第 12 章 図書の印刷
6E8C4890 678
印刷する対象(ネットワーク変数、ステーショングローバル変数、変数・パラメータリ
スト)を選択し、印刷を実行します。
・リファレンスの見方
変数 リファレンス
ネットワーク変数 ファンクションブロックで参照時 {ステーション名}-{S:コントローラ名} -POU 名:POUNo.:アクション名:PPP>RRR:CC
ステーション変数 フンクションで参照時 {ステーション名}-{S:コントローラ名} -POU 名:POUNo.:アクション名:PPP>RRR:CC
コントローラ変数 プログラムで参照時 {ステーション名}-{S:コントローラ名} -TTEEE:アクション名:PPP>RRR:CC
・記号の意味
記号 意味 種類
S スロット番号 -
TT タスク種別 EV:イベントタスク、SS:超高速タスク、IP :割り込みタスク、 HS:高速スキャンタスク、MS:メインスキャンタスク、BG:バックグランドタスク
EEE タスク番号 -
PPP ページ番号 -
> アクション -:参照(Read)、>:代入(Write)、S :設定(Set)、R :設定(Reset)
RRR 行番号 -
CC 列番号 -
印字例 {Stn1}-{1:S3PU55}-M000:ACT_1_B:001-
001:01

12.5 変数リファレンス、関数リファレンスの印刷
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 679
12
■関数リファレンスの印刷
ライブラリに登録された個々の関数(Program,Fucntion Block,
Function)について、
どのステーションの、どのコントローラの、どのプログラムの、どの場所で、呼出しさ
れているのかを印刷します。
ドキュメント印刷で、メニュー<ファイル><ページ設定>を選択し、用紙の向きを
[横]に設定します。
関数リストを選択し、印刷を実行します。
・リファレンスの見方
変数 リファレンス
FUNCTION ファンクションブロックで参照時 {ステーション名}-{S:コントローラ名} -POU 名:POUNo.:アクション名:PPP>RRR:CC
FUNCTION BLOCK フンクションで参照時 {ステーション名}-{S:コントローラ名} -POU 名:POUNo.:アクション名:PPP>RRR:CC
PROGRAM プログラムで参照時 {ステーション名}-{S:コントローラ名} -TTEEE:アクション名:PPP>RRR:CC
記号の意味は、「変数リファレンスの印刷」と同じです。

第 12 章 図書の印刷
6E8C4890 680
12.6 PDF ファイルに出力する
エンジニアリングツールで作成した成果物を、紙に印刷するかわりに、PDF 形式のファ
イルへ出力することができます。
印刷の場合と同様に、ドキュメント全体の一括出力とプログラム毎の個別出力の2つの
方法があります。
■ドキュメント全体の一括出力
1)[プロダクトツリー]で、メニュー<ファイル><ドキュメント印刷>を選択します。
2)表示された[システム共通項目設定]ダイアログで、各項目を設定した後に<OK>
ボタンを押します。
ここで、設定した内容は保存され、表紙として PDF ファイルに出力されます。
なお、項目設定が不要な場合や設定済みの内容を変更しない場合は、<キャンセル>ボタ
ンを押してください。
3)表示された[ドキュメント印刷]ダイアログで、印刷対象を選択した後にメニュー
<ファイル><印刷(PDF へ出力)>を選択します。
4)表示された[印刷(PDF へ出力)]ダイアログで、フォルダを選択した後に、<PDF
へ出力>ボタンを押します。
以上の操作により、指定したフォルダ下に、ドキュメント項目別に既定のフォルダ名、
およびファイル名で PDF 形式のファイルが出力されます。
■プログラム毎の個別出力
1)[プログラムエディタ]で、メニュー<ファイル><印刷(PDF 出力)>を選択します。
2)プログラムエディタ(フルグラフィック)の場合には、表示された[印刷]ダイア
ログで、ローカル変数の出力を指定します。
ここで、ローカル変数を PDF ファイルに出力する場合は、<はい>ボタンを押しま
す。出力しない場合は、<いいえ>ボタンを押します。
3)表示された[印刷(PDF へ出力)]ダイアログで、フォルダを選択した後に、<PDF
へ出力>ボタンを押します。
以上の操作により、指定したフォルダ下に、ドキュメント項目別に既定のフォルダ名、
およびファイル名で PDF 形式のファイルが出力されます。
○補足
・ [ドキュメント印刷]、および[プログラムエディタ]の[プレビュー]画面上にある<PDF へ出
力>ボタンでも、ドキュメント項目を個別に PDF ファイルに出力することができます。
プレビュー機能については、「12.3 印刷の実行」を参照してください。
・ 指定したフォルダ下に既に同じフォルダ名が存在する場合は、ファイル出力をすることができま
せん。
この場合は、該当フォルダ名を変更するか、該当フォルダを移動、または削除してから再度実行
してください。
・ PDF ファイルに出力されるドキュメントのページ総数が 50 頁を超える場合には、利便性を配慮
して本機能では 50 頁ごとに自動的にファイルを分割して別ファイル名として連続出力します。

681
付録 A メッセージ一覧

付録 A 仕 様
6E8C4890 682
本ツールを使用中、エラーダイアログおよび、確認ダイアログが表示された場合の対処
方法は以下のとおりです。
●注記
・ オンライン接続時に伝送上のエラーが発生する場合については、下記の点について確認して
ください。
・ ケーブルの接続状態
・ 接続相手の動作状態(システムログで確認)
・ IP アドレスの設定(Ethernet 接続時)
なお、コントローラや、ネットワーク機器のエラー内容については、それぞれのマニュアル
を参照してください。
・ 本ツールの動作環境、アプリケーションの内容、または伝送相手機器の動作状態によっては、
以下の表に記載のないメッセージが表示されることがあります。
問題点が解決されない場合は、お手数ですが、ユーザ・サポート窓口へ以下の情報をご連絡
ください。
・使用のバージョン
・動作環境
・再現方法
No. メッセージ内容 説明と対処法
3052 ファイル共有ロックの数が上限を超えています。 DB メンテナンスを行って再度操作を実行してください。
3502 データの表記に誤りがあります。数値の範囲、文字の長さ、または時間単位や区切り文字の使い方を修正してください。
データ型に従った表記で値を入力してください。
4000 ドライブにメデイアがセットされていないか、準備が出来ていません。
FD,MO 等のメディアをドライブにセットしてください。書込みのときは、書き込み許可にしてください。
5001 カレントプロダクトパスがレジストリに登録されていない プロダクトマネージャにて、カレントプロダクトパスを設定してください。
5002 システム名を設定してください。 システム名を 1 文字以上設定してください。
5003 システム名は半角 64 文字,全角 32 文字以内にしてください。
システム名を既定文字数以内にしてください。
5004 システム名に次の文字を含めないでください。# ' * . / : ; < > ? @ [ \ ] |
システム名に無効な文字を入力しないでください。
5005 このシステムは存在しないか、または既に削除されています。
該当のシステムは他のユーザによって削除されています。プロダクトツリーを最新の状態に更新してください。
5006 このシステムは既に作成されています。 新規作成/コピー/名前の変更しようとしたシステム名は既に存在します。プロダクトツリーを最新の状態に更新してください。
5012 このシステムは現在使用中のため操作できません。 該当のシステムは他のユーザによって使用されています。他のユーザが V-Tool を終了した後、再度操作を行ってください。
5040 タスクエントリのプログラムが POU エントリに登録されていない。 タスクエントリを削除した後、既存のプログラムを再登録してください。
5041 タスクエントリのプログラムがライブラリに登録されていない。 タスクエントリ/POU エントリを削除した後、プログラムを再登録してください。
5045 タスクエントリの仮引数と実引数の数またはデータ型が一致しません。
タスクエントリ引数画面にて、タスクエントリの仮引数と実引数の数および、データ型を合わせてください。

ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 683
No. メッセージ内容 説明と対処法
5081 I/O インタフェースやコントローラのモジュールが正しい位置に登録されていないか、そのパラメータが設定されていないため、I/O モジュールを登録できません。
パラレル I/O の場合、左端に管理コントローラ(S,L)を登録してください。また、model3000 の拡張 I/O ユニットに I/O を登録するときは、インタフェースをスロット 0 に登録してください。 シリアル I/O の場合、SIF(インタフェース)下に I/O を登録するときは、SIF パラメータで管理コントローラ(L3)を登録してください。 SIF 配下のシリアル I/O をインポートする場合、プロダクトツリーおよびモジュールパラメータで、SIF の登録とそのパラメータの設定を事前に行ってください。
5082 このワード長の I/O モジュールの割り付けは一杯です。 パラレル I/O を割り付ける I/O コネクション領域が一杯です。I/O コネクション領域変更で領域を拡張してください。
5083 変数を登録する前にネットワークモジュールを登録してください。 RIO 配下の I/O 変数を登録する前にネットワークモジュール(TN等)を登録し、ネットワークに接続してください。
5084 ネットワーク変数に登録があるため削除できません。 該当モジュールに割り付いているネットワーク変数を削除した後、モジュールを削除してください。
5085 異なるタイプの S コントローラを混在して使用することは出来ません。
同一ステーション内で複数の S コントローラを登録するときは、同じタイプの S コントローラを登録してください。
5086 I/O 変数の登録があるため削除できません。 I/O 変数を削除した後、該当モジュールを削除してください。
5087 ステーショングローバル変数が 1KW 以上登録されているため、変更できません。
ステーション変数を 1KW 以内に納めてください。
5088 ブロック転送の登録があるため削除できません。 MELPLAC のブロック転送登録で、該当 I/O モジュールの指定を削除した後に、モジュールを削除してください。
5107 POUNo は既にに一杯で、追加できません。 不要なプログラムを削除してください。
5109 他のユーザが保存中のため保存できませんでした。しばらく待ってから再度保存してください。
他のユーザの保存が完了した後、再度保存してください。
5260 該当の Function または FunctionBlock は未登録です。 該当の Function または FunctionBlock がライブラリに登録されていません。再登録してください。
5261 該当の Function または FunctionBlock は未コンパイルです。
該当のFunctionまたはFunctionBlockが未コンパイルです。Function またはFunctionBlock をコンパイルしてください。
5303 識別できる名前を入力してください。 変数を 1 文字以上入力してください。
5304 名前が長すぎます。 既定文字数以内にしてください。(変数は半角 20 文字以内)
5305 先頭文字に不正な文字が使われています。 変数の先頭文字は、英字、全角文字、半角カタカナ文字を使用してください。
5306 2 文字目以降に不正な文字が使われています。 変数の 2 文字目以降は、英数字、アンダースコア、全角文字、半角カタカナ文字を使用してください。
5307 アンダスコアは連続して使えません。 アンダースコアを連続して使用しないでください。
5308 既に予約された名前です。 予約語を使用しないでください。
5352 データ型名を入力してください。 データ型を 1 文字以上入力してください。
5353 Array[0..99] of のように 2 ドット必要です。 配列型を定義するときは、添字の下限/上限の間に”..”を入力してください。
5354 Array[0..99] of のように[ ]が必要です。 配列型を定義するときは、添字を”[ ]”で括ってください。
5355 Array[0..99] of のように正数の添字が必要です。 配列型を定義するときは、添字を正数で入力してください。
5356 Array[0..99] of のように下限は 0 が必要です。 配列型を定義するときは、添字の下限を 0 としてください。
5357 Array[0..99] of のように上限は65535 までの正数が必要です。
配列型を定義するときは、添字の上限を 65535 以内としてください。
5358 Array[0..99] of のように of が必要です。 配列型を定義するときは、データ型の前に”OF”を入力してください。
5359 基本型か、既存のデータ型を入力してください。 データ型には、基本型または、ライブラリに登録されているデータ型を入力してください。

付録 A 仕 様
6E8C4890 684
No. メッセージ内容 説明と対処法
5360 これはまだ保存されていないデータ型です。 ユーザ定義型のときは、構造体メンバが定義されたデータ型を指定してください。ファンクションブロック型のときは、コンパイル済みのファンクションブロック名を指定してください。
5361 PTR,PTRB 型は Program,Function Block,またはFunction の引数宣言で単独で使用してください。
PTR,PTRB 型は Program,Function Block,またはFunction の引数宣言で単独で使用してください。
5362 Program,Function,または Function Block の型名は使用できません。
グローバル変数で、Program,Function,または Function Block の型名を使用しないでください。
5363 Program や Function の型名は使用できません。 ローカル変数で、Program や Function の型名を使用しないでください。
5364 Function Block の型名は,Program または Function Block の VAR 宣言で単独で使用してください。
Function Block の型名は、Program または Function Block の VAR 宣言で使用してください。 また、配列で定義しないでください。
5402 基本型でないか、または Program,Function Block のVAR 宣言でないので値の設定はできません。
変数の値は、データ型が基本型でないと設定できません。また、ローカル変数のときは、Program,Function Block のVAR 宣言でないと値の設定はできません。
5590 クロスリファレンス検索を実行中です。しばらくお待ちください。 他のユーザのクロスリファレンス表示が完了した後、再度実行してください。
5605 指定されたプログラムがないか、既に削除されています。変数登録を中止します。
現在開いているプログラムが存在しません。他のユーザによって削除された可能性があります。プログラムの登録状況を確認してください。
5608 この変数名が重複しています。変数登録を中止します。 変数名を重複しないように登録してください。
5609 この変数宣言域はすでに一杯です。変数登録を中止します。
不要な変数を削除してください。
5610 このコントローラはすでに削除されています。変数登録を中止します。
現在開いているコントローラが存在しません。他のユーザによって削除された可能性があります。コントローラの登録状況を確認してください。
5630 受信者登録が一杯。 不要な画面を閉じて、再度実行してください。
5643 このプロダクトは次のユーザが編集中または占有しています。
該当ユーザの編集作業が完了した後、再度実行してください。
5650 インポートできません(同時に作成されたファイルではありません)
1 回のエクスポート操作で作成された一連のFDのセットを使用して下さい。
5651 インポートできません(V2Port のディスクではありません) Ver2 のエクスポートで作成されたファイルまたは FD を使用して下さい。
5653 インポートできません(既に同じ名前のシステムが存在します) システム名を変更してインポート可能です。
5655 圧縮または展開の処理が実行されています。時間をおいてからリトライしてください。
他のユーザのインポートまたはエクスポート作業が終了してから実行して下さい。
5656 他のユーザまたは他のアプリケーションがシステムを使用しています。
システムを利用している他のユーザの PC または、現在操作している PC で V-Tool を一旦終了して下さい。
5663 ディスクの空きが有りません HDD の空き容量を確保して下さい。
5665 ファイルを開けません ファイルの読み出し権限を正しく設定してください。
5666 ファイルを読めません ファイルの読み出し権限を正しく設定してください。
5667 ファイルを書き込めません ライトプロテクトを外して下さい。または読み出し専用属性を解除して下さい。
5668 ファイルを削除できません ライトプロテクトを外して下さい。または読み出し専用属性を解除して下さい。
5669 ファイルが壊れています Ver2 のエクスポート機能で作成したファイルを使用して下さい。
5683 インポートファイルの内容が不正(POU 宣言部) 指定された PRG/FBK/FUN ファイル内容に誤りがありインポートできません。内容をチェックするか、対象のエクスポートから再度実行してください。
5685 インポートファイルの内容が不正(変数のマッピングに失敗した) 指定された PRG/FBK/FUN ファイル内容に誤りがありインポートできません。内容をチェックするか、対象のエクスポートから再度実行してください。
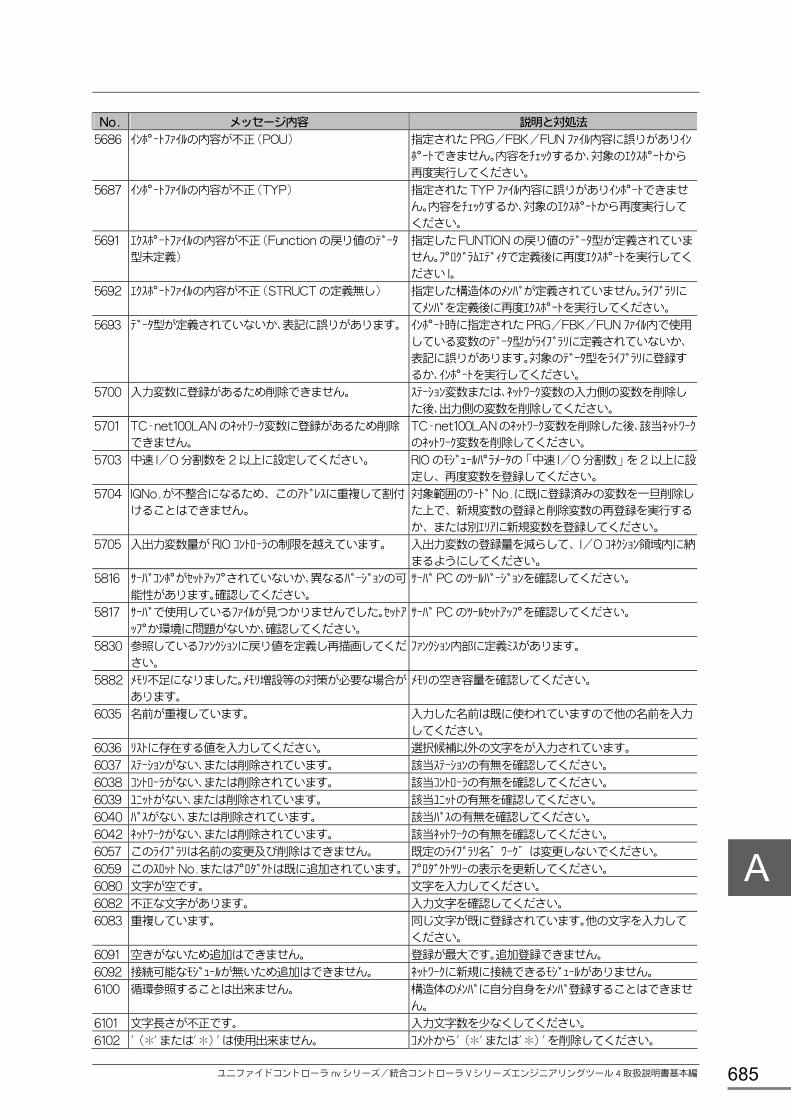
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 685
No. メッセージ内容 説明と対処法
5686 インポートファイルの内容が不正(POU) 指定された PRG/FBK/FUN ファイル内容に誤りがありインポートできません。内容をチェックするか、対象のエクスポートから再度実行してください。
5687 インポートファイルの内容が不正(TYP) 指定された TYP ファイル内容に誤りがありインポートできません。内容をチェックするか、対象のエクスポートから再度実行してください。
5691 エクスポートファイルの内容が不正(Function の戻り値のデータ型未定義)
指定した FUNTION の戻り値のデータ型が定義されていません。プログラムエディタで定義後に再度エクスポートを実行してください l。
5692 エクスポートファイルの内容が不正(STRUCT の定義無し) 指定した構造体のメンバが定義されていません。ライブラリにてメンバを定義後に再度エクスポートを実行してください。
5693 データ型が定義されていないか、表記に誤りがあります。 インポート時に指定された PRG/FBK/FUN ファイル内で使用している変数のデータ型がライブラリに定義されていないか、表記に誤りがあります。対象のデータ型をライブラリに登録するか、インポートを実行してください。
5700 入力変数に登録があるため削除できません。 ステーション変数または、ネットワーク変数の入力側の変数を削除した後、出力側の変数を削除してください。
5701 TC-net100LAN のネットワーク変数に登録があるため削除できません。
TC-net100LAN のネットワーク変数を削除した後、該当ネットワークのネットワーク変数を削除してください。
5703 中速 I/O 分割数を 2 以上に設定してください。 RIO のモジュールパラメータの「中速 I/O 分割数」を 2 以上に設定し、再度変数を登録してください。
5704 IQNo.が不整合になるため、このアドレスに重複して割付けることはできません。
対象範囲のワード No.に既に登録済みの変数を一旦削除した上で、新規変数の登録と削除変数の再登録を実行するか、または別エリアに新規変数を登録してください。
5705 入出力変数量が RIO コントローラの制限を越えています。 入出力変数の登録量を減らして、I/O コネクション領域内に納まるようにしてください。
5816 サーバコンポがセットアップされていないか、異なるバージョンの可能性があります。確認してください。
サーバ PC のツールバージョンを確認してください。
5817 サーバで使用しているファイルが見つかりませんでした。セットアップか環境に問題がないか、確認してください。
サーバ PC のツールセットアップを確認してください。
5830 参照しているファンクションに戻り値を定義し再描画してください。
ファンクション内部に定義ミスがあります。
5882 メモリ不足になりました。メモリ増設等の対策が必要な場合があります。
メモリの空き容量を確認してください。
6035 名前が重複しています。 入力した名前は既に使われていますので他の名前を入力してください。
6036 リストに存在する値を入力してください。 選択候補以外の文字をが入力されています。
6037 ステーションがない、または削除されています。 該当ステーションの有無を確認してください。
6038 コントローラがない、または削除されています。 該当コントローラの有無を確認してください。
6039 ユニットがない、または削除されています。 該当ユニットの有無を確認してください。
6040 バスがない、または削除されています。 該当バスの有無を確認してください。
6042 ネットワークがない、または削除されています。 該当ネットワークの有無を確認してください。
6057 このライブラリは名前の変更及び削除はできません。 既定のライブラリ名”ワーク”は変更しないでください。
6059 このスロット No.またはプロダクトは既に追加されています。 プロダクトツリーの表示を更新してください。
6080 文字が空です。 文字を入力してください。
6082 不正な文字があります。 入力文字を確認してください。
6083 重複しています。 同じ文字が既に登録されています。他の文字を入力してください。
6091 空きがないため追加はできません。 登録が最大です。追加登録できません。
6092 接続可能なモジュールが無いため追加はできません。 ネットワークに新規に接続できるモジュールがありません。
6100 循環参照することは出来ません。 構造体のメンバに自分自身をメンバ登録することはできません。
6101 文字長さが不正です。 入力文字数を少なくしてください。
6102 '(*'または'*)'は使用出来ません。 コメントから'(*'または'*)'を削除してください。

付録 A 仕 様
6E8C4890 686
No. メッセージ内容 説明と対処法
6103 メンバーが定義されています。変更できません。 構造体のメンバが既に登録されているため型名を変更できません。
6104 プログラムが定義されています。変更できません。 回路が既に書かれているので型名を変更することはできません。
6150 数値以外に入力することはできません。 数値を入力してください。
6151 値が範囲外です。 範囲内の値を入力してください。
6152 YES(1)または NO(0)を選択してください。 同左
6153 該当コントローラの Pou エントリに空きがありません。 不要なプログラムの POU エントリを削除してください。
6154 コントローラで未登録なので設定できません。 コントローラ内のタスクエントリが削除されています。タスクエントリ画面を再表示してください。
6155 コントローラではこれ以上変更できません。1 度更新してから再度変更して下さい。
同時に変更できる最大数は 30 です。30 以上のタスクエントリを変更するときは、分割して実行してください。
6156 コントローラではこれ以上削除できません。件数を減らして下さい。
同時に変更できる最大数は 150 です。150 以上のタスクエントリを変更するときは、分割して実行してください。
6160 数値以外に入力することはできません。 数値を入力してください。
6161 値が範囲外です。 範囲内の値を入力してください。
6162 変数が登録されていません。 登録済みの変数を入力してください。
6180 指定されたプログラムがないか、既に削除されています。 表示対象の変数をもう一度設定し直して下さい。
6181 変数が存在しないか基本型ではありません。 実在する変数名を入力して下さい。
6182 値を入力できません。変数が存在しないか基本型ではありません。
表示対象の変数をもう一度設定し直して下さい。
6183 値を入力できません。ローカル変数かコントローラ変数ではありません。
コントローラの変数を入力して下さい。
6184 Program,Function Block の VAR 宣言の変数を入力してください。
VAR_TEMP や VAR_INPUT で宣言された変数は指定できません。
6250 伝送速度が不正です。 送信速度に選択候補以外の文字が入力されています。
6251 送信ノードが不正です。 送信ノードに選択候補以外の文字が入力されています。
6252 出力コントローラが不正です。 出力コントローラに選択候補以外の文字が入力されています。
6253 ネットワーク変数が設定されている為変更できません。 同左
6254 ワード長が不正です。 TC-net100LAN のワード長は指定に制限があります。他ブロックの指定と重複しない範囲で、64 の倍数を登録してください。
6255 ブロック範囲が設定されている為クリアできません。 TC-net100LAN にて、複数の連続ブロックを同一ブロック('ブロック範囲')として登録した場合には、複数のうちの先頭ブロックを選択して削除を行ってください。
6260 読出専用が不正です。 読み出し専用に選択候補以外の文字が入力されています。
6263 出力コントローラが違う為ドロップできません。 同左
6267 プログラムの編集権を取得していないため編集できません。
プログラムエディタが編集モードになっていないと編集できません。
6273 I/O 変数を登録する前にモジュールパラメータを登録してください。
同左
6274 値が範囲外です。 選択候補の値を入力してください。
6275 RIO として登録された変数は変更できません。 同左
6276 受信側のコントローラは I/O 速度'SS'をサポートしていません。送信側の設定を'HS'または'MS'に変更してください。
同左
6277 タスク指定の混在が禁止のため登録できません。 同左
6278 タスク指定が混在しているため禁止にできません。 同左
6300 文字が長すぎます。(50 文字以内) コメントの文字数を減らしてください。
6301 '(*'または'*)'は使用できません。 コメントから'(*'または'*)'を削除してください。
6302 数値以外に入力することはできません。 ワード No に数値を入力してください。
6303 値が範囲外です。 ワード No に正の数値を入力してください。
6304 数値以外に入力することはできません。 BitNo に数値を入力してください。

ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 687
No. メッセージ内容 説明と対処法
6305 値が範囲外です。 BitNo に 0-15 の値を入力してください。
6306 Bool 型以外は値の設定ができません。 BitNo を設定する場合はデータ型を BOOL にしてください。
6307 選択できない宣言種別です。 同左
6308 選択できない宣言属性です。 同左
6309 数値以外に入力することはできません。 OrderNo に数値を入力してください。
6310 値が範囲外です。 OrderNo に正の数値を入力してください。
6321 ポインタ引数はモニター値の更新はできません。 同左
6346 メモリー不足のため、以下のアドレス割付けができません。 変数を割り付けるために必要な空きメモリがありません。アドレスの自動割付不可となっている領域がある場合には一括コンパイルを実行してください。
6348 すでに受信されているのでアドレス,データ型を変えることはできません。
アドレスやデータ型変更するには一旦受信側を削除してください。
6349 このアドレスに重複して割付けることはできません。 既存のワード No.に割り付いている IQNo.が奇数のため、2ワード以上の変数を既存のワード No.に重複して割り付けることができません。2ワード以上の変数から先に割り付け直してください。
6363 入出力引数の数が多すぎます。[Bout] 引数の数を減らしてください。
6364 入出力引数の数が多すぎます。[Wout] 引数の数を減らしてください。
6365 入出力引数の数が多すぎます。[Bin] 引数の数を減らしてください。
6366 入出力引数の数が多すぎます。[Win] 引数の数を減らしてください。
6601 モニター を中止します。 再度モニタを開始してください。
6602 コントローラ書込み処理後に モニタ を実行してください。 同左
6603 ケーブルが接続されていないか、コントローラ側の準備ができていません。
ケーブルの接続または、コントローラの状態を確認し、再度実行してください。
6604 モニタを継続できず、停止しました。モニタを再度開始してください。
再度モニタを開始してください。
6850 その位置にシンボルを挿入できません。'INS'キーで上書きモードにしてください。
SFC 回路を描画するときは、上書きモードにしてください。
6851 列削除制限(≦12)。 最小の列数は 12 列です。
6852 列挿入制限(≧36)。 最大の列数は 36 列です。
6853 ページ部品挿入失敗(従属セル存在)。 ページ区切りを挿入する行に他の命令語を含めないでください。
6915 選択したファンクションまたはファンクションブロックは、このコントローラではサポートされていません。
該当コントローラで使用可能なファンクションまたは、ファンクションブロックを選択してください。
6916 プログラムエディタがユーザの回答を待っています。プログラムエディタのアクティブなダイヤログを閉じてから、再度起動してください。
現在開いているアクティブなダイアログを閉じた後、再度実行してください。
6917 このプログラムは次のユーザが編集中、またはスワップ・フォース中です。
他のユーザの編集または、スワップ・フォースが完了した後、再度実行してください。
6918 このプログラムは次のユーザによって変更されました。一旦閉じて、再表示してください。
同左
6923 このプログラムはライブラリ上に存在しません。 タスクエントリ/POU エントリを削除した後、プログラムを再登録してください。
6925 このプログラムはライブラリ上に存在しません。 タスクエントリ/POU エントリを削除した後、プログラムを再登録してください。
6942 プログラムエディタの最大数を超過しました。 不要な画面を閉じた後、再度実行してください。
6980 指定フォーマットに誤りがあります。指定フォーマット:vHMI.exe /M xx [/C] システム\ステーション\ユニット No\モジュール No\タスク名\タスクエントリ No
同左
6981 指定の条件に一致するプログラムが見つかりません。 同左
6982 システムが見当たりません。システム ID が正しいか確認をして下さい。
同左

付録 A 仕 様
6E8C4890 688
No. メッセージ内容 説明と対処法
6983 ステーションが見当たりません。ステーション名が正しいか確認をして下さい。
同左
6984 ユニットが見当たりません。ユニット No が正しいか確認をして下さい。
同左
6985 モジュールが見当たりません。モジュール No が正しいか確認をして下さい。
同左
6986 プログラムを開くために指定した変数またはデバイスはありません。
同左
6987 タスクが見当たりません。タスク名が正しいか確認してください。
同左
6988 タスクエントリが見当たりません。タスクエントリ No が正しいか確認をしてください。
同左
7000 モジュール名の取得に失敗しました。 他のユーザによってコントローラが削除された可能性があります。プロダクトツリーの表示を更新してください。
7001 POU エントリ情報の取得に失敗しました。 他のユーザによってコントローラが削除された可能性があります。プロダクトツリーの表示を更新してください。
7080 メインユニットが登録されていません。 メインユニット構成を登録してください。
7081 ダウンロード対象のモジュールが登録されていません。 ダウンロード対象のモジュールを登録してください。
7083 アップロード対象のモジュールが登録されていません。 アップロード対象のモジュールを登録してください。
7084 メインユニット,メインモジュールの登録がツールとコントローラで一致しません。
メインユニット、メインモジュールの登録を実装状態に合わせてください。
7085 現在のローカル変数宣言のままではツールソースを作成できないプログラムがあります。一括コンパイル後に再度実行してください。
同左
7134 このステーションにはコントローラが登録されていません ステーションにコントローラを登録してください。
7136 RS-232C 接続の場合、[システム状態]は表示することが出来ません。[システム状態]を表示する場合は、Ethernet接続に変更して下さい。
Ethernet 接続に変更して下さい。
7139 左端のコントローラが登録されていません。 左端に S コントローラを登録して下さい
7140 ツールに登録されたハードウェア構成と実装されているハードウェア構成が一致していません。
もう一度コンフィグレーションのダウンロードをして下さい。
7141 運転モードが異なります。 運転モードを RUN または RUN-F に変更して下さい。
7142 このコントローラは、この機能をサポートしていません。コントローラのバージョンを確認して下さい。
コントローラのバージョンとサポートしている機能を確認して下さい。
7143 RS-232C ケーブルの接続先モジュールが違います。 RS-232C ケーブルを対象のモジュールに正しく接続して下さい。
7144 指定フォーマットに誤りがあります。指定フォーマット:SysView.exe [/T /M] システム,ステーション
同左
7145 指定フォーマットに誤りがあります。指定フォーマット:SysView.exe [/T /M] システム,ステーション,スロット No,バスNo,ユニット No,画面 No
同左
7146 システムが見当たりません。システム名が正しいか確認をして下さい。
同左
7147 ステーションが見当たりません。ステーション名が正しいか確認をして下さい。
同左
7150 指定フォーマットに誤りがあります。指定フォーマット:SysLog.exe [/M /T] システム,ステーション,スロット No
同左
7152 システムが見当たりません。システム名が正しいか確認をして下さい。
同左
7153 ステーションが見当たりません。ステーション名が正しいか確認をして下さい。
同左
7155 モジュールが見当たりません。スロット No が正しいか確認をして下さい。
同左

ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 689
No. メッセージ内容 説明と対処法
7480 指定された PVNo は既に他のタグの制御対象として指定されています
他の PVNo を入力してください。
7481 指定された TagNo は既に登録されています 他の TagNo を入力してください。
7700 プリンタの状態に問題があるため印刷することができません。
プリンタの電源およびプリンタの接続を確認してください。
7752 5800I/O のアドレス設定に誤りがあります。(設定条件:TOP<ADRS<=BOT)
AIEX カード(AIEX-5862,RTD-5863)のアドレススイッチはプライベートバス接続された AI-5861 の TOP スイッチと BOT スイッチとの間で左記の設定条件を満たしていなければなりません。5800I/O のアドレス設定を見直してください。
7753 5800I/O で AI カードがプライベートバス接続されていません。
AIEX カード(AIEX-5862,RTD-5863)は単体で使用することができず、必ず AI-5861 とプライベートバスで接続する必要があります。5800I/O カードの登録とパラメータを見直してください。
7754 マルチコントローラ構成で、I/O 入出力モードが統一されていません。
メインユニットに複数台のコントローラを実装するマルチコントローラ構成では、各コントローラの I/O 入出力モードを一致させてください。
7755 RIO の中速 I/O 分割が正しく行われていません。対象変数のひとつを再登録してください。
該当 RIO コントローラおけるネットワーク I/O 変数登録のひとつで、「I/O 速度」などを変更した後に再び元に戻してください。この操作により中速 I/O の分割は再構成されます。
7830 伝送処理中です。 必要に応じて再実行してください。
7831 コントローラの構成が変更されました。再読み込みをしてください。
同左
7832 コントローラへコンフィグレーションがダウンロードされていません。 コントローラへコンフィグレーションをダウンロードしてから使用して下さい。
7857 プリンタの状態に問題があるため印刷することができません。
プリンタの電源およびプリンタの接続を確認してください。
7858 中速 I/O 分割数を変更した場合は、対象変数のひとつを再登録してください。
該当 RIO コントローラおけるネットワーク I/O 変数登録のひとつで、「I/O 速度」などを変更した後に再び元に戻してください。この操作により中速 I/O の分割は再構成されます。
7905 これ以上ユーザを登録できません。最大 100 ユーザ ユーザの登録数が 100 以内になるように登録を削除して下さい
7906 セットアップが正しく行われていません もう一度セットアップを行って下さい。
7907 次の文字と空白は使えません。?"/\<>*|:; これらの文字を含まないように登録して下さい。
7908 ユーザ名は 1 文字以上 32 文字以内で指定してください 指定の文字数で登録して下さい。
7909 コメントは 64 文字以内で指定してください 指定の文字数で登録して下さい。
7911 クライアント PC とサーバ PC は、同じバージョンのツールをセットアップしてください
サーバとクライアントは同じバージョンの V ツールをセットアップしてください。
7912 スタンドアロン版がセットアップされた PC へログインすることはできません
サーバ用セットアップを実行した PC に接続して下さい。
7913 パスワードは半角英数字で指定してください 指定した範囲の文字で登録してください。
7914 パスワードは 1 文字以上 32 文字以内で指定してください 指定の文字数で登録して下さい。
7921 フォーマットされた書き込み可能なディスクをセットしてください 同左
7922 1.44MB 以上空きのあるディスクをセットしてください 同左
7930 ファイルがコピーできない ファイルコピー中に異常が発生しました。エラーダイアログに表示されるコピー元とコピー先のフォルダ状態を確認してください。
7931 エクスポート先に同じ名前のファイルが存在します エラーダイアログに表示されるフォルダから該当のファイルを取り除くか、またはファイル名の指定を変更してください。
7932 指定されたファイルは存在しません 同左
7933 ファイル名を指定してください 同左
7934 ディスクの状態が取得できません 指定されたディスクは実装されていないか、異常と思われます。ディスク状態を確認してください。
7935 インポート先に同じ名前のシステムが存在します エラーダイアログに表示されるフォルダから該当のファイルを取り除くか、またはファイル名の指定を変更してください。
7936 インポートするファイルを選択してください 同左

付録 A 仕 様
6E8C4890 690
No. メッセージ内容 説明と対処法
7939 ファイルを開けません ファイルが異常です。使用されるディスクの状態を確認してください。
7940 ファイルを読めません ファイルが異常です。使用されるディスクの状態を確認してください。
7941 ファイルが壊れています ファイルが異常です。使用されるディスクの状態を確認してください。
7942 システム名に誤りがあります。 システム名として使えない文字を含んでいるか、または文字数制限をオーバーしています。名称を変更してください。
7960 このシステムは現在使用中のためメンテナンスできません。 該当のシステムは他のユーザによって使用されています。他のユーザが V-Tool を終了した後、再度操作を行ってください。
8000 データ型がライブラリに登録されていない。 該当のユーザ定義型または、Function Block 型をライブラリに登録してください。
8001 POU 型がライブラリに登録されていない。 該当の POU エントリを削除し、プログラムを再登録してください。
8002 POU 型が POU エントリに登録されていない。 該当のタスクエントリを削除し、既存のプログラムを再登録してください。
8003 構造体メンバーが登録されていない。 ユーザ定義型の構造体メンバを登録してください。
8004 循環参照がある。 循環参照にならないようプログラムを変更してください。
8005 プログラムにエラーあり。 プログラムエディタを開き、エラーリストを確認してください。
8006 POU が未コンパイル。 プログラムエディタを開き、エラーリストを確認してください。
8007 Value が不正。 データ型に従った値を入力してください。
8010 プログラムが空です。 プログラムが 1 ステップもありません。不要なプログラムのときは削除してください。
8011 ローカル変数宣言に誤りがある。 該当のプログラムを開き、ローカル変数宣言を確認してください。
8012 タスクエントリの仮引数と実引数の数またはデータ型が一致しない。
タスクエントリ引数画面にて、タスクエントリの仮引数と実引数の数および、データ型を合わせてください。
8053 コンパイル対象のコントローラがありません。 コントローラが存在するシステムで一括コンパイルを実行してください。
8054 変数宣言域が一杯。 アドレスの空きがありません。不要な変数を削除してください。
8100 POU エントリは既に使われています。POU エントリを削除した後、もう一度エントリして下さい。
POU エントリの末尾から7 個はツールソース用ですので使用しないでください。
8101 コードが大きすぎます。ソース付きのダウンロードは実行できません。リソースレポートでコードのサイズを確認してください。
モニタソース情報や、コメント情報を含まない設定を検討して下さい。
8102 ステーション名が重複しているため、逆生成を中断します。ステーションの構成を見直してください。
逆生成ソース内のステーション名が他のステーションに使用されています。該当するステーション名の変更、またはステーションの削除をした上で、アップロード・逆生成を再実行してください。
8103 TagNo が重複しているため、逆生成を中断します。TagNo の登録を見直してください。
逆生成ソース内の TagNo が他のステーションにて登録されています。該当する TagNo の変更、または削除をした上で、アップロード・逆生成を再実行してください。

691
付録 B

付録B
E8C4890 692
B.1 PCS6000/4000 のシステムを変換する
既設の PCS6000、または PCS4000 の以下の情報を本ツール情報に変換します。
対象のコントローラは、ユニファイドコントローラ type2 です。
・タグ情報
・PCS パラメータ
・LFC 図面
・IFC 図面
■変換手順
既設の PCS6000、または PCS4000 システムの変換手順の概要は、以下のとおりです。
各変換手順の詳細については、該当する各章を参照してください。
タグ情報の変換を実行する
PCS パラメータの変換を実行する
LFC/IFC 図面の変換を実行する
該当コントローラの標準変数を登録する
一括コンパイルを実行する
変換後のタグ情報、PCS パラメータを
該当ステーションにインポートする
LFC/IFC シンボルを該当システムに
追加する
LFC/IFC 変換後のプログラムを
該当コントローラのタスクエントリに登録する
PCS ビルダ情報、OIS ビルダ情報を
手動で HDD にコピーする
付録 B.1.1 PCS6000/4000 の
タグ・パラメータを変換する
付録 B.1.2 PCS6000/4000 の
LFC/IFC 図面を変換する
新計装タグエディタを起動する
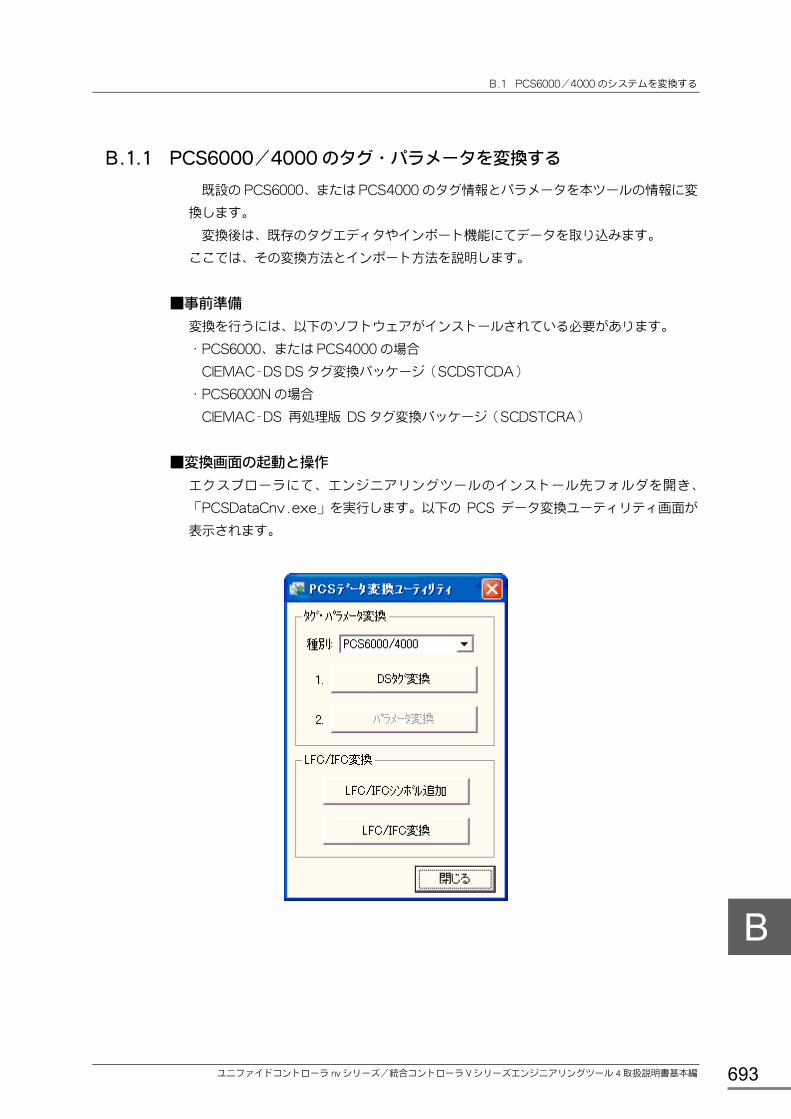
B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 693
B.1.1 PCS6000/4000 のタグ・パラメータを変換する
既設の PCS6000、または PCS4000 のタグ情報とパラメータを本ツールの情報に変
換します。
変換後は、既存のタグエディタやインポート機能にてデータを取り込みます。
ここでは、その変換方法とインポート方法を説明します。
■事前準備
変換を行うには、以下のソフトウェアがインストールされている必要があります。
・PCS6000、または PCS4000 の場合
CIEMAC-DS DS タグ変換パッケージ(SCDSTCDA)
・PCS6000N の場合
CIEMAC-DS 再処理版 DS タグ変換パッケージ(SCDSTCRA)
■変換画面の起動と操作
エクスプローラにて、エンジニアリングツールのインストール先フォルダを開き、
「PCSDataCnv.exe」を実行します。以下の PCS データ変換ユーティリティ画面が
表示されます。

付録B
E8C4890 694
1) [種別]欄にて、既設の PCS 種別を選択します。
・PCS6000/4000 :PCS6000、または PCS4000 の場合
・PCS6000N :PCS6000N の場合
2) [DS タグ変換]ボタンを押し、タグの変換を実行します。
変換方法については、以下のマニュアルを参照してください。
・ PCS6000、または PCS4000 の場合
CIEMAC-DS DS タグ変換パッケージ 取扱説明書(6E8C5083)
・ PCS6000N の場合
CIEMAC-DS 再処理版 DS タグ変換パッケージ 取扱説明書(6E8C5162)
※nv シリーズで追加になったパラメータは、変換の対象外です。
3) DS タグ変換で[データ変換]ボタンを押すと、I/O モジュール変換画面が表示さ
れます。(種別が PCS6000/4000 の場合)
既設の I/O モジュール(シリアル I/O)に対する、変換先の TC-net I/O モジュール
を割り付けます。
プロダクトツリーで TC-net I/O モジュールをドラッグし、変換先にドロップすると、
変換先の情報を自動で入力します。
[OK]ボタンを押すと、PV_PARA,LP_PARA,PB_PARA の I/O 情報(入出力点
メインスロット番号/ノード番号/ユニット番号/スロット番号/ポイント番号、およ
び入出力点変数名)を自動変換します。
変換先の入力が空欄の場合は、該当の I/O モジュールに対する I/O 情報の自動変換は
行いません。
[キャンセル]ボタンを押した場合は、すべての I/O モジュールに対する I/O 情報の
自動変換は行いません。

B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 695
4) DS タグ変換が正常に完了すると、[パラメータ変換]ボタンが有効になります。
[パラメータ変換]ボタンを押すと、以下のステーション情報設定画面が表示され
ます。
5) ステーション名とステーション種別を入力し、[OK]ボタンを押します。
プロダクトツリーでステーション名をドラッグし、[ステーション名]にドロップす
ると、ステーション名とステーション種別を自動で入力します。
6) 以下の変換画面が表示され、変換状態を表示します。

付録B
E8C4890 696
■変換したファイルをインポートする
変換が正常に完了すると、以下のフォルダにインポートファイルが作成されます。
{エンジニアリングツールのインストール先フォルダ}\CSV
以下の機能を使用し、変換したファイルをインポートします。
1) タグパラメータをインポートする
1-1)V-Tool からインポート対象のコントローラを選択し、タグエディタを起動し
ます。
1-2)インポートするタグ種別を選択し、メニュー<ファイル><インポート>を実
行します。
インポート方法の詳細は、「4.3 Tag をインポートする」を参照してください。
対象のファイルは以下のとおりです。
ファイル名 データの意味
STN?PV.CSV PV:指示計
STN?LP.CSV LP:調節計
STN?PB.CSV STN?PB(2).CSV
PB:押しボタン
STN?TC.CSV TC:時間計・カウンタ
STN?DB.CSV DB:データブロック
STN?SQ.CSV SQ:シーケンス操作器
STN?R.CSV R:実数パラメータ
STN?W.CSV W:整数パラメータ
?:ステーション番号 1~8
2) 変数をインポートする
2-1)V-Tool のプロダクトツリーにて、ステーションフォルダを選択し、メニュー
<ファイル><インポート>を実行します。
○補足
・ステーションには、コントローラが登録されている必要があります。
インポート手順の詳細は、「11.3 テキスト形式によるインポート/エクスポート」を
参照してください。
インポート対象のファイルは以下のとおりです。
ファイル名 データの意味
STN?Para.txt パラメータエクスポートファイル
?:ステーション番号 1~8
○補足
・インポート情報に1つでもエラーがある場合、全ての変数のインポートをキャンセルします。

B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 697
2-2)インポート時のエラー対処方法
インポートでエラーがあった場合、インポート終了時に画面にログが表示されます
ので、STN?Para.txt ファイルを開いて対象の変数を変更してください。
エラー内容の詳細はオンラインマニュアルの付録 A を参照してください。
例 1) [Note] Datatype is changed := 'Variable:PC1_062_A'
変数の変換において V-Tool で使用できない文字は”_”(アンダーバー)に自動で変
換します。
このとき、変数名が重複する場合がありますので変数名の変更を行ってください。
例 2) [Error] Wrong Variable := '4112_V10, Error Code:5305'
V-Tool では変数名の先頭に数値を指定できません(但し、タグ変数を除く)ので変
数名の変更を行ってください。
3)新計装タグエディタを起動する
3-1)V-Tool のプロダクトツリーにて、システムを選択し、新計装タグエディタを
起動します。
等値化でエラーが表示された場合は、エラー箇所を修正し、再度、新計装タグエデ
ィタを起動してください。
本操作により、複合タグ(PID 等)の変数メンバを同じタグ変数で参照することがで
きます。
B.1.2 PCS6000/4000 の LFC/IFC 図面を変換する
既設の PCS6000、または PCS4000 の LFC 図面および IFC 図面を本ツールのプロ
グラム(フルグラフィック)に変換します。
■事前準備
・ 変換元の PCS ビルダシステム(PCSSYS**.DIR および配下の全ファイル)を手動
で HD にコピーしてください。
・ 変換先のシステムを V-Tool で作成してください。
・ FC 図面を変換する場合、変換先のシステムに新計装 FB ライブラリを追加してくだ
さい。
■PCS データ変換ユーティリティを起動する
1) エクスプローラにて、エンジニアリングツールのインストール先フォルダを開き、
「PCSDataCnv.exe」を実行します。以下の PCS データ変換ユーティリティ画面
が表示されます。(C/S 版の場合、サーバ PC で実行してください。)
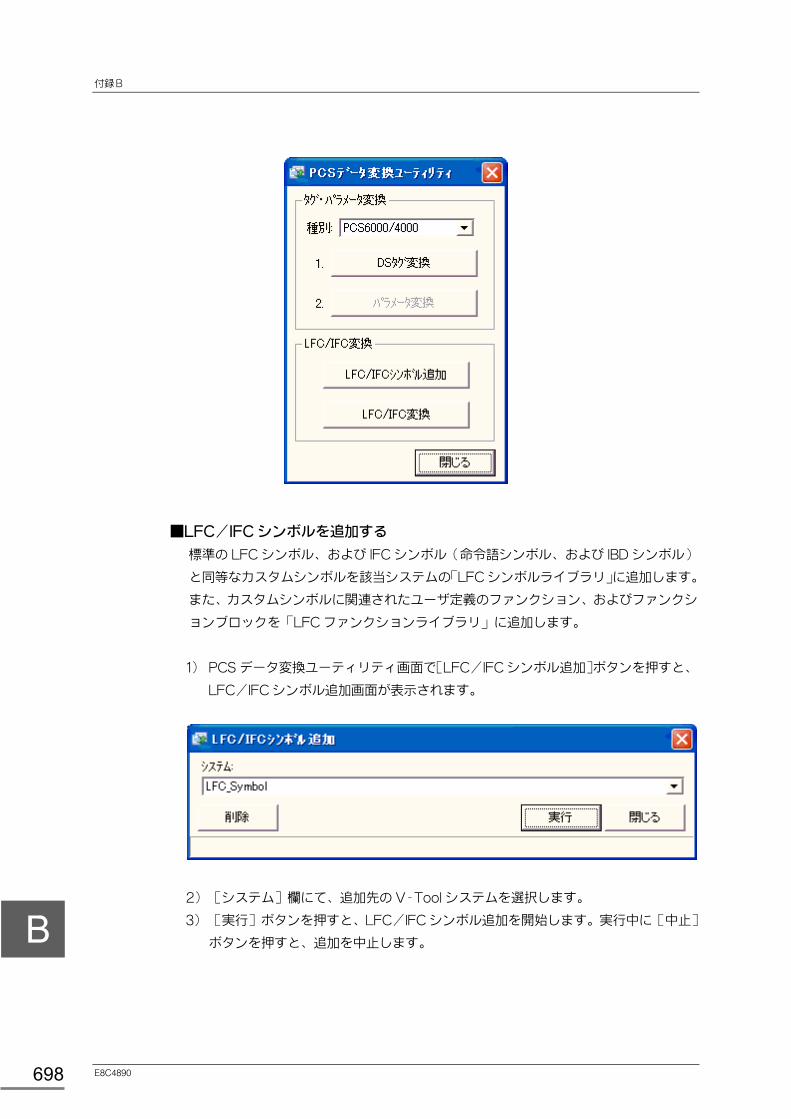
付録B
E8C4890 698
■LFC/IFC シンボルを追加する
標準の LFC シンボル、および IFC シンボル(命令語シンボル、および IBD シンボル)
と同等なカスタムシンボルを該当システムの「LFC シンボルライブラリ」に追加します。
また、カスタムシンボルに関連されたユーザ定義のファンクション、およびファンクシ
ョンブロックを「LFC ファンクションライブラリ」に追加します。
1) PCS データ変換ユーティリティ画面で[LFC/IFC シンボル追加]ボタンを押すと、
LFC/IFC シンボル追加画面が表示されます。
2) [システム]欄にて、追加先の V-Tool システムを選択します。
3) [実行]ボタンを押すと、LFC/IFC シンボル追加を開始します。実行中に[中止]
ボタンを押すと、追加を中止します。

B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 699
○補足
・ 「LFC シンボルライブラリ」以外のカスタムシンボルライブラリに同名のカスタムシンボル
が登録済みの場合は、該当シンボルの追加をスキップします。
・ LFC 図面にて、ユーザライブラリ(MCRBLK 以外)の LFC シンボルを使用している場合は、
LFC/IFC 変換を実行する前に、同一名称のカスタムシンボルを登録してください。また、該
当のカスタムシンボルに関連するユーザ FBK を登録してください。(詳細については、本章
の「LFC 変換用のカスタムシンボル、およびユーザ FBK を作成する方法」を参照してくださ
い。)
・ カスタムシンボルの端子の位置、および端子順は、ユーザライブラリの LFC シンボルに合わ
せてください。
■LFC/IFC シンボルを削除する
LFC/IFC シンボル追加画面で追加した「LFC シンボルライブラリ」、および「LFC フ
ァンクションライブラリ」を削除します。
1) LFC/IFC シンボル追加画面の[システム]欄にて、V-Tool システムを選択し、[削
除]ボタンを押します。
2) 確認ダイアログが表示されますので、[OK]ボタンを押します。
■LFC/IFC 変換を実行する
LFC 図面、および IFC 図面をプログラム(フルグラフィック)に変換します。
変換後のプログラムは、ライブラリの[ワーク]に登録されます。
1) PCS データ変換ユーティリティ画面で[LFC/IFC 変換]ボタンを押すと、LFC/IFC
変換画面が表示されます。

付録B
E8C4890 700
2) [変換元システム(PCS ビルダシステム)]欄の右端の[…]ボタンを押すと、フ
ォルダ選択のダイアログを表示しますので、PCS ビルダシステムのフォルダを選択
し、[OK]ボタンを押します。
3) [変換先システム]欄で、変換先の V-Tool システムを選択します。
4) 変換後の POU 名の先頭に固有名称を設定する場合は、[POU 名の接頭字]に文字列
を入力します。
変換後の POU 名は、接頭字+タスク種別(2 文字)+タスクエントリ No.(3 桁)
で登録されます。
5) [オプション]ボタンを押すと、LFC/IFC 変換のオプション画面が表示されます。
以下の変換動作を設定します。[OK]ボタンを押すと、設定内容が反映されます。
オプション名 チェック 変換動作
なし ・IFC の「オペステップ」シンボルを SFC の「フェーズステップ」シンボルに変換します。
‘オペステップ’を’フェーズステップ 2’に変換
あり ・IFC の「オペステップ」シンボルを SFC の「フェーズステップ 2」シンボルに変換します。
なし ・IFC の「ステップセット」シンボルを SFC の「ステップ」シンボルに変換します。
‘ステップセット’を’リセットジャンプ 2’に変換
あり ・IFC の「ステップセット」シンボルを SFC の「ステップ」+「リセットジャンプ 2」シンボルに変換します。
6) [実行]ボタンを押すと、LFC/IFC 変換を開始します。実行中に[中止]ボタン
を押すと、変換を中止します。
LFC/IFC 変換が完了すると、変換先システムのフォルダ内に変換結果のログ
(CnvLFCLog.txt)を出力します。

B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 701
■変換後のプログラムをコンパイルする
LFC/IFC 変換の実行後、以下の操作によりプログラムをコンパイルします。
1) 変換後のプログラムを該当コントローラのタスクエントリに登録します。
2) 以下の標準変数を登録します。
ZW,PV_PARA,LP_PARA,TC_PARA,SQ_PARA,PV_DATA,LP_DATA,
TC_DATA,SQ_DATA
3) 該当コントローラの一括コンパイルを実行します。
■変換単位
既設 PCS6000 の 1 つのタスク(MS000 等)を 1 つの POU に変換します。
LFC 図面または IFC 図面の 1 つのファイルを該当 POU 内の 1 つのワークシートに変換
します。
■変換対象のシンボルおよび図形
変換対象のシンボルおよび図形は、以下のとおりです。
LFC/IFC シンボル 変換対象 変換後のシンボル 備考
LFC の計器シンボル ○ カスタムシンボル
LFC の機能シンボル ○ カスタムシンボル
LFC の部品シンボル ○ カスタムシンボル
IFC のフローシンボル ○ 標準の SFC
IFC の命令語シンボル ○ カスタムシンボル
IFC の IBD シンボル ○ カスタムシンボル
結線 ○ 結線
結線名称 ○ テキストボックス
テキスト(横書き) ○ テキストボックス
テキスト(縦書き) ○ テキストボックス 横書きに変換します。
図形(直線) ○ 線 線の色は‘黒’に変換します。
図形(円) ○ 図形(楕円) 線の色は‘黒’、内部の色は‘透明’に変換します。
図形(半円) - -
矢印 ○ 線(矢印付き) 線の色は‘黒’に変換します。
実行番号 ○ ネットワークの実行順
シンボル名 ○ 変数名 変数名として使用できない文字は、‘_’に変換します。

付録B
E8C4890 702
■変換の制約事項
1) 変換元のシンボルの間隔が狭い場合は、変換後のシンボルが重なる場合があります。
2) シンボルの形状によっては、変換後の端子に接続された結線が重なる場合がありま
す。
3) 入力端子を省略できるシンボル(IBD シンボル等)の場合、変換後の端子に接続さ
れた結線が重なる場合があります。
4) 変換後のシンボルは、グリッドに合わせて描画するため、変換元のシンボル位置と
同等とならない場合があります。
5) 変換元の図面データが不正の場合、変換後に結線が描画されない場合があります。
■追加対象の LFC シンボル
[LFC/IFC シンボル追加]にて追加される標準の LFC シンボル(計器シンボル、機
能シンボル、部品シンボル)、および対応するカスタムシンボル名は以下のとおりです。
No. LFC シンボル名 カスタムシンボル名 備考 追加対象
1 ワード入力 ワード入力 - ○
2 ワードビット化 ワードビット化 - ○
3 ワードデータ化 ワードデータ化 - ○
4 ワード論理積 ワード論理積 - -
5 ワード論理和 ワード論理和 - -
6 ワード排他論理和 ワード排他論理和 - -
7 ワード論理否定 ワード論理否定 - -
8 ワードゲート ワードゲート - ○
9 ワード右回転 ワード右回転 - ○
10 ビット入力 ビット入力 - ○
11 ビット論理積 ビット論理積 - ○
12 ビット論理和 ビット論理和 - ○
13 ビット論理否定 ビット論理否定 - ○
14 ビットオン検出 ビットオン検出 - ○
15 ビットオフ検出 ビットオフ検出 - ○
16 オンディレイ秒 オンディレイ秒 - ○
17 オンディレイ分 オンディレイ分 - ○
18 オフディレイ秒 オフディレイ秒 - ○
19 オフディレイ分 オフディレイ分 - ○
20 ワンショット秒 ワンショット秒 - ○
21 ワンショット分 ワンショット分 - ○
22 データ入力 データ入力 - ○
23 データビット化 データビット化 - ○
24 データワード化 データワード化 - ○
25 加算(+) 加算(+) - ○
26 減算(-) 減算(-) - ○
27 乗算(×) 乗算(×) - ○
28 除算(÷) 除算(÷) - ○
29 符号反転(±) 符号反転(±) - ○
30 絶対値(| |) 絶対値(| |) - ○
31 平方根(√) 平方根(√) - ○
32 正弦(SIN) 正弦(SIN) - ○
33 余弦(COS) 余弦(COS) - ○

B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 703
No. LFC シンボル名 カスタムシンボル名 備考 追加対象
34 正接(TAN) 正接(TAN) - ○
35 逆正弦(ASIN) 逆正弦(ASIN) - ○
36 逆余弦(ACOS) 逆余弦(ACOS) - ○
37 逆正接(ATAN) 逆正接(ATAN) - ○
38 常用対数(LOG) 常用対数(LOG) - ○
39 自然対数(LN) 自然対数(LN) - ○
40 指数関数(EXP) 指数関数(EXP) - ○
41 べき乗(PWR) べき乗(PWR) - ○
42 大検定(>) 大検定(>) - ○
43 大同検定(≧) 大同検定(≧) - ○
44 同検定(=) 同検定(=) - ○
45 小同検定(≦) 小同検定(≦) - ○
46 小検定(<) 小検定(<) - ○
47 異検定(≠) 異検定(≠) - ○
48 範囲検定(≧≧) 範囲検定(≧≧) - ○
49 最大値(MAX) 最大値(MAX) - ○
50 最小値(MIN) 最小値(MIN) - ○
51 平均値(AVE) 平均値(AVE) - ○
52 出力制限(LMT) 出力制限(LMT) - ○
53 入力選択(SEL) 入力選択(SEL) - ○
54 不感帯(DB) 不感帯(DB) - ○
55 変化率制限(△LM) 変化率制限(△LM) - ○
56 データゲート データゲート - ○
57 折線近似 折線近似 - ○
58 逆折線近似 逆折線近似 - ○
59 工業単位変換 工業単位変換 - ○
60 パーセント変換 パーセント変換 - ○
61 微分 微分 - -
62 積分 積分 - -
63 位相進み遅れ 位相進み遅れ - -
64 無駄時間 無駄時間 - ○
65 移動平均 移動平均 - ○
66 PID演算 PID演算 - -
67 MV計算 MV計算 - ○
68 MV固定値登録 MV固定値登録 - ○
69 指示計 指示計 - ○
70 電流計 電流計 - -
71 偏差指示計 偏差指示計 - -
72 風向風速計 風向風速計 - -
73 ベーシックPID-A ベーシックPID-A ベーシックPID-A2 と同等。 ○
74 ベーシックPID-P ベーシックPID-P ベーシックPID-P2 と同等。 ○
75 アドバンストPID-A アドバンストPID-A - -
76 アドバンストPID-P アドバンストPID-P - -
77 サンプルPI-A サンプルPI-A - -
78 サンプルPI-P サンプルPI-P - -
79 P制御 P制御 - -
80 アドバンスト PID-A1 アドバンスト PID-A1 - -
81 時間比例オンオフ PID 時間比例オンオフ PID - -
82 時間比例オンオフ PID2 時間比例オンオフ PID2 - -
83 2位置オンオフ制御 2位置オンオフ制御 - -
84 3位置オンオフ制御 3位置オンオフ制御 - -
85 比率設定器 比率設定器 - -
86 ハンドコントロール ハンドコントロール - ○

付録B
E8C4890 704
No. LFC シンボル名 カスタムシンボル名 備考 追加対象
87 M/A操作器 M/A操作器 - ○
88 C/L設定器 C/L設定器 - -
89 プログラム設定器 プログラム設定器 - -
90 1点出力モータ 1点出力モータ - -
91 1点出力モータA 1点出力モータA - -
92 2点出力モータ 2点出力モータ - -
93 2点出力モータA 2点出力モータA - -
94 電動弁 電動弁 - -
95 電磁弁 電磁弁 - -
96 ダブルソレノイドバルブ ダブルソレノイドバルブ - -
97 ASTM温度補正 ASTM温度補正 - -
98 ブレンドマスタ ブレンドマスタ - -
99 ブレンド調節計 ブレンド調節計 - -
100 バッチ定量(AO) バッチ定量(AO) - -
101 バッチ定量(DO) バッチ定量(DO) - -
102 時間計 時間計 - -
103 カウンタ カウンタ - -
104 プリセットカウンタ プリセットカウンタ - ○
105 パルス積算 パルス積算 - -
106 プリセットパルス積算 プリセットパルス積算 - ○
107 アナログ積算 アナログ積算 - -
108 プリセットアナログ積算 プリセットアナログ積算 - ○
109 計量 計量 - -
110 照光式押釦ランプ 照光式押釦ランプ 標準入出力で代用。 -
111 4点式押釦ランプ 4点式押釦ランプ 標準入出力で代用。 -
112 7点式切換器 7点式切換器 標準入出力で代用。 -
113 7点式表示器 7点式表示器 標準入出力で代用。 -
114 データ型マルチスイッチ データ型マルチスイッチ - -
115 ビット型マルチスイッチ ビット型マルチスイッチ - -
116 モード付押釦ランプ モード付押釦ランプ - -
117 モード付データスイッチ モード付データスイッチ - -
118 モード付フラグスイッチ モード付フラグスイッチ - -
119 流量温度補正 流量温度補正 - ○
120 流量圧力補正 流量圧力補正 - ○
121 フイードフォワード1 フィードフォワード1 フィードフォワード1-2 と同等。 ○
122 フィードフォワード2 フィードフォワード2 フィードフォワード2-2 と同等。 ○
123 セットポイントコントロール セットポイントコントロール - -
124 ダイレクトコントロール ダイレクトコントロール - -
125 プロポーショナル&ディレイ プロポーショナル&ディレイ - ○
126 ウオッチドッグタイマ ウオッチドッグタイマ - ○
127 タスク実行指令 タスク実行指令 タスク種別が不一致。 ○
128 タスク実行許可 タスク実行許可 タスク種別が不一致。 ○
129 タスク実行禁止 タスク実行禁止 タスク種別が不一致。 ○
130 2点式表示器 2点式表示器 標準入出力で代用。 -
131 7点式押釦ランプ 7点式押釦ランプ 標準入出力で代用。 -
132 力率計 力率計 - ○
133 セット-F/F セット-F/F - ○
134 リセット-F/F リセット-F/F - ○
135 IBD-コンディション IBD-コンディション - ○
136 IBD-アクション(N) IBD-アクション(N) - ○
137 IBD-アクション(S) IBD-アクション(S) - ○
138 IBD-アクション(R) IBD-アクション(R) - ○
139 IBD-論理積 IBD-論理積 - ○

B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 705
No. LFC シンボル名 カスタムシンボル名 備考 追加対象
140 IBD-論理和 IBD-論理和 - ○
141 IBD-論理否定 IBD-論理否定 - ○
142 IBD-オン検出 IBD-オン検出 - ○
143 IBD-オフ検出 IBD-オフ検出 - ○
144 IBD-TPU(秒) IBD-TPU(秒) - ○
145 IBD-TPU(分) IBD-TPU(分) - ○
146 IBD-TDO(秒) IBD-TDO(秒) - ○
147 IBD-TDO(分) IBD-TDO(分) - ○
148 IBD-セット優先-F/F IBD-セット優先-F/F - ○
149 IBD-リセット優先-F/F IBD-リセット優先-F/F - ○
150 IBD-ワイプアウト IBD-ワイプアウト - ○
151 対数計器 対数計器 - ○
152 メカリモート操作器-A メカリモート操作器-A - ○
153 2点式押釦ランプ 2点式押釦ランプ 標準入出力で代用。 -
154 機器故障形表示器 機器故障形表示器 標準入出力で代用。 -
155 機器状態形表示器 機器状態形表示器 標準入出力で代用。 -
156 微分2 微分2 - -
157 位相進み遅れ2 位相進み遅れ2 - ○
158 PID演算2 PID演算2 - -
159 ベーシック PID-A2 ベーシック PID-A2 - ○
160 ベーシック PID-P2 ベーシック PID-P2 - ○
161 アドバンスト PID-A12 アドバンスト PID-A12 MV 補正なし。 ○
162 アドバンスト PID-P2 アドバンスト PID-P2 MV 補正なし。 ○
163 サンプル PI-A2 サンプル PI-A2 - -
164 サンプル PI-P2 サンプル PI-P2 - -
165 時比オンオフ PID-2 時比オンオフ PID-2 - -
166 時比オンオフ PID2-2 時比オンオフ PID2-2 - -
167 ブレンド調節計 2 ブレンド調節計 2 - -
168 バッチ定量 2(AO) バッチ定量 2(AO) - -
169 フイードフォワード1-2 フィードフォワード1-2 - ○
170 フィードフォワード2-2 フィードフォワード2-2 - ○

付録B
E8C4890 706
■追加対象の IFC シンボル
[LFC/IFC シンボル追加]にて追加される標準の IFC シンボル(命令語シンボル、IBD
シンボル)、および対応するカスタムシンボル名は以下のとおりです。
No. IFC シンボル名 カスタムシンボル名 備考 追加対象
1 アクション IBD-アクション(N) ビット操作:ON/OFF ○
2 IBD-アクション(S) ビット操作:セット ○
3 IBD-アクション(R) ビット操作:リセット ○
4 コンディション IBD-コンディション ビット判定 ○
5 IBD-コンディション T(GE) 判別式:A>=B ○
6 IBD-コンディション T(LE) 判別式:A<=B ○
7 IBD-コンディション T(EQ) 判別式:A=B ○
8 IBD-コンディション T(LE2) 判別式:B<=A<=C ○
9 論理積 IBD-論理積 - ○
10 論理和 IBD-論理和 - ○
11 論理否定 IBD-論理否定 - ○
12 ワイプアウト IBD-ワイプアウト - ○
13 F/Fセット IBD-セット優先-F/F - ○
14 F/Fリセット IBD-リセット優先-F/F - ○
15 TPU IFC-TPU(秒) 時間単位:S ○
16 TPU IFC-TPU(分) 時間単位:M ○
17 TDO IFC-TDO(秒) 時間単位:S ○
18 TDO IFC-TDO(分) 時間単位:M ○
19 状変オン検出 IBD-オン検出 - ○
20 状変オフ検出 IBD-オフ検出 - ○
※上記以外のアクション、コンディションについては、対象外です。

B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 707
■変換対象の IFC シンボル
[LFC/IFC 変換]にて変換される標準の IFC シンボル(フローシンボル)は以下のと
おりです。
以下に記載のない IFC シンボルは、サポートしていません。
No. IFC シンボル 変換後のシンボル
1 <スタート>
・シーケンス+イニシャルステップ+
トランジション(常時 ON)
<補足>
・シーケンス命令の変数名は、SQ タグの標準変数
(SQ_PARA[X])を指定します。
・IFC シンボルのシーケンスユニット番号は、上記
標準変数のインデックスに変換します。
・シーケンス名称(a)は、ステップ変数(S1)の変数
コメントに変換します。
2 <ストップ>
・リンク
<補足>
・自シーケンス投入モードが指定されていた場合は、
変換後に同等な回路を追加してください。
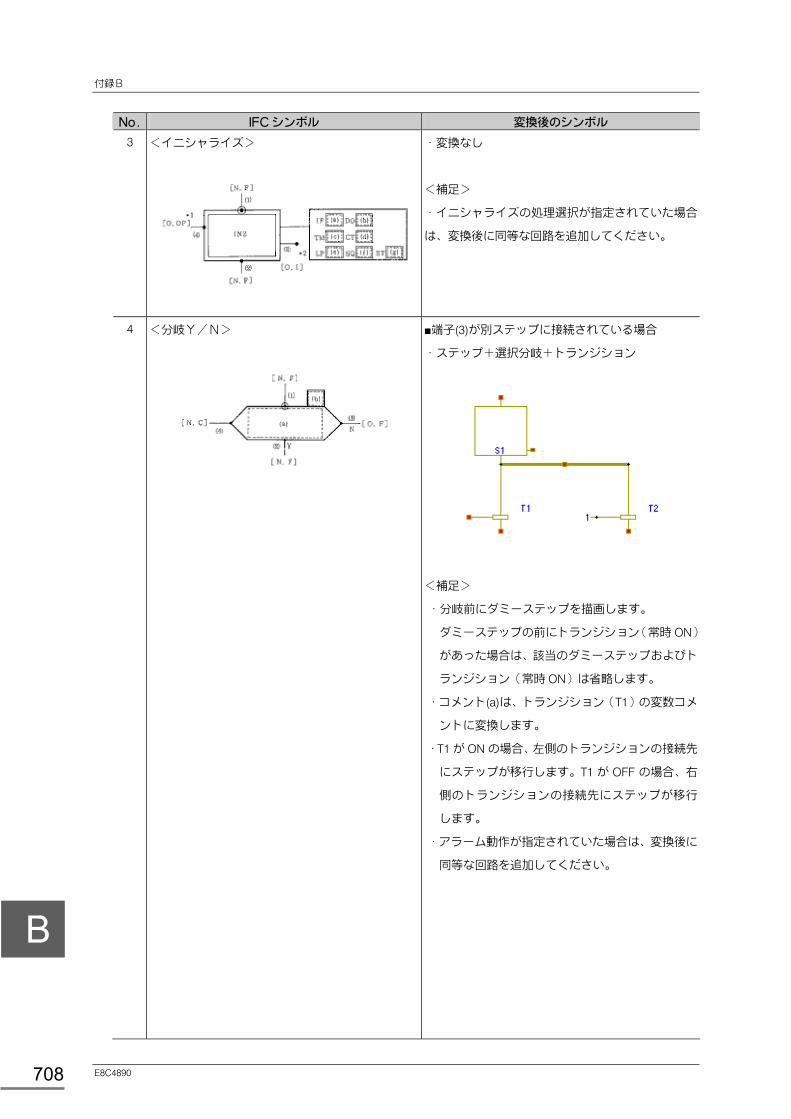
付録B
E8C4890 708
No. IFC シンボル 変換後のシンボル
3 <イニシャライズ>
・変換なし
<補足>
・イニシャライズの処理選択が指定されていた場合
は、変換後に同等な回路を追加してください。
4 <分岐Y/N>
■端子(3)が別ステップに接続されている場合
・ステップ+選択分岐+トランジション
<補足>
・分岐前にダミーステップを描画します。
ダミーステップの前にトランジション(常時 ON)
があった場合は、該当のダミーステップおよびト
ランジション(常時 ON)は省略します。
・コメント(a)は、トランジション(T1)の変数コメ
ントに変換します。
・T1 が ON の場合、左側のトランジションの接続先
にステップが移行します。T1 が OFF の場合、右
側のトランジションの接続先にステップが移行
します。
・アラーム動作が指定されていた場合は、変換後に
同等な回路を追加してください。

B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 709
No. IFC シンボル 変換後のシンボル
■端子(3)が別ステップの前で合流している場合
・ステップ+選択分岐+トランジション+リンク
<補足>
・端子(3)の先は、合流後のステップへのリンク命令
に変換します。
・T1 が ON の場合、左側のトランジションの接続先
にステップが移行します。T1 が OFF の場合、右
側のトランジションの接続先にステップが移行
します。
■端子(3)が自ステップの前で合流している場合、
または開放されている場合
・ステップ+トランジション

付録B
E8C4890 710
No. IFC シンボル 変換後のシンボル
5 <分岐N/Y>
■端子(3)が別ステップに接続されている場合
・ステップ+選択分岐+IBD-論理否定+
トランジション
<補足>
・分岐前にダミーステップを描画します。
ダミーステップの前にトランジション(常時 ON)
があった場合は、該当のダミーステップおよびト
ランジション(常時 ON)は省略します。
・コメント(a)は、トランジション(T1)の変数コメ
ントに変換します。
・T1 が ON の場合、左側のトランジションの接続先
にステップが移行します。T1 が OFF の場合、右
側のトランジションの接続先にステップが移行
します。
・アラーム動作が指定されていた場合は、変換後に
同等な回路を追加してください。
■端子(3)が別ステップの前で合流している場合
・ステップ+選択分岐+IBD-論理否定+
トランジション+リンク

B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 711
No. IFC シンボル 変換後のシンボル
<補足>
・端子(3)の先は、合流後のステップへのリンク命令
に変換します。
・T1 が ON の場合、左側のトランジションの接続先
にステップが移行します。T1 が OFF の場合、右
側のトランジションの接続先にステップが移行
します。
■端子(3)が自ステップの前で合流している場合、
または開放されている場合
・ステップ+IBD-論理否定+トランジション
6 <多岐分岐>
・ステップ+選択分岐+トランジション
<補足>
・多岐分岐のシンボル 1 つをトランジション 1 つに
変換します。
・分岐先の合流については、合流後のステップへの
リンク命令に変換します。
・分岐前にダミーステップを描画します。
ダミーステップの前にトランジション(常時 ON)
があった場合は、該当のダミーステップおよびト
ランジション(常時 ON)は省略します。
・コメント(a)は、トランジション(T1 または T2)
の変数コメントに変換します。

付録B
E8C4890 712
No. IFC シンボル 変換後のシンボル
7 <ステップ>
・ステップ+トランジション(常時 ON)
<補足>
・コメント(a)は、ステップ変数(S1)の変数コメン
トに変換します。
・動作前チェックが指定されていた場合は、変換後
に同等な回路を追加してください。
8 <オペステップ>
■フェーズステップに変換する場合
・フェーズステップ+トランジション(常時 ON)
<補足>
・オペレーションステップ区間のユーザプログラム
については、フェーズステップの内部へ移動して
ください。
■フェーズステップ 2 に変換する場合
・フェーズステップ 2+トランジション(常時 ON)
T1
S1TIME#0.5M
1 Ph2
1

B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 713
No. IFC シンボル 変換後のシンボル
<補足>
・オペステップの接続先がエラーステップの場合、
変換先のアンサステップ 2 の上にフェーズステッ
プ 2 を接続します。
9 <オペステップ(F 付)>
■フェーズステップに変換する場合
・フェーズステップ+トランジション(常時 ON)
■フェーズステップ 2 に変換する場合
・フェーズステップ 2+トランジション(常時 ON)
<補足>
・オペステップと同様です。
10 <分岐/合流>
■並列分岐
・ステップ+トランジション(常時 ON)+並列分岐
<補足>
・分岐前にダミーステップを描画します。
ダミーステップの前にトランジション(常時 ON)
があった場合は、該当のダミーステップおよびト
ランジション(常時 ON)は省略します。
■並列合流
・ステップ+並列合流+トランジション(常時 ON)

付録B
E8C4890 714
No. IFC シンボル 変換後のシンボル
<補足>
・合流前にダミーステップを描画します。
ダミーステップの前にトランジション(常時 ON)
があった場合は、該当のダミーステップおよびト
ランジション(常時 ON)は省略します。
11 <ページリンク>
・リンク
<補足>
・ページエントリの接続先のステップ名を指定しま
す。
12 <ページエントリ>
・変換なし
<補足>
・リンクにて、ページエントリの接続先のステップ
名を指定します。
13 <ステップセット>
■リセットジャンプ 2 に変換しない場合
・ステップ+トランジション(常時 ON)
<補足>
・IFC のステップセット命令は、通常のステップ命
令に変換します。
・コメント(a)は、ステップ変数(S1)の変数コメン
トに変換します。
・ステップセット動作については、ステップを切り
換えたいプログラム内にて、RJ_P 命令を使用し
た回路を追加してください。RJ_P 命令の実行許
可フラグとしては、コントローラ変数を使用して
ください。

B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 715
No. IFC シンボル 変換後のシンボル
■リセットジャンプ 2 に変換する場合
・ステップ+トランジション(常時 ON)+RJ_P2
S1
T1
SQ_PARA[0]
10
RJ_P2
E
SQ_P
PHNO
( )tmpOUT
1
<補足>
・オペレーションステップへの切り換えは、RJ_P2
を使用します。
・モード指定が M/A/C の場合は、RJ_P2 の出力
に新計装 FB の dsSQ_M/dsSQ_A/dsSQ_C を追
加します。
14 <タイマ条件>
■端子(3)が未接続の場合
・ステップ+トランジション
S1
T1
(S)
T_DATA[0].STAT
T_DATA[0].UP
S2
T21
(S)
T_DATA[0].RST
<補足>
・タイマセット・計時・タイムアップの動作は、タ
イマ(T_DATA)を使用します。
・コメント(a)は、ステップ変数(S1)の変数コメン
トに変換します。
・共通タイマ No.(b)は、タイマ(T_DATA)のイン
デックスに変換します。

付録B
E8C4890 716
No. IFC シンボル 変換後のシンボル
■端子(3)にフローシンボルが接続されている場合
・ステップ+選択分岐+トランジション
S1
T1
(S)
T_DATA[0].STAT
T_DATA[0].UP
S2
T21
T31
(S)
T_DATA[0].RST
<補足>
・T1 が ON の場合、左側のトランジションの接続先
にステップが移行します。T1 が OFF の場合、右
側のトランジションの接続先にステップが移行
します。
15 <エラーステップ>
■アンサバック異常時の指定がブランクの場合
・アンサステップ 2+選択分岐+トランジション
[先頭ワークシート]
| |MV101.FI1
( )S1_ANS
| |MV102.FI1Worksheet_2
行:10 列:5
[ワークシート No.1+X]
T1 T2S1.ASA| |
S1_ANS
S1TIME#0.5M
Ans2
<補足>
・変換後の先頭ワークシートに、端子(3)に接続され
た信号のアンサ状態をセットする回路を追加し
ます。
・コメント(a)は、ステップ変数(S1)の変数コメン
トに変換します。
・動作前チェックが指定されていた場合は、変換後
に同等な回路を追加してください。

B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 717
No. IFC シンボル 変換後のシンボル
■アンサバック異常時の指定が M の場合
・アンサステップ 2+選択分岐+トランジション+
dsSQ_M
[先頭ワークシート]
| |MV101.FI1
( )S1_ANS
| |MV102.FI1Worksheet_2
行:10 列:5
[ワークシート No.1+X]
T1 T2S1.ASA| |
S1_ANS
S1TIME#0.5M
Ans2
[最終ワークシート]
DSSQ_MDSSQ_M_1
CK
TAG
MS1.ASA
SQ_PARA[0]
Worksheet_2行:10 列:5
<補足>
・変換後の最終ワークシートに、新計装 FB の
dsSQ_M を追加します。

付録B
E8C4890 718
■変換結果のログ
変換結果のログを以下のファイルに出力します。
{ユーザプロダクトパス}\{変換先システム名}\CnvLFCLog.txt
ログの出力フォーマットは以下のとおりです。
--- LFC/IFC Convert START ----
[MSXXX] Status=[Compiled]
[Note] 0106:Text direction change. (01-003:001)
[Note] 0203:Not supported variabe. [DW00000](01-002:004)
[Note] 0206:Terminal was omitted. [ビット論理積](01-007:003)
:
:
--- LFC/IFC Convert END ----
MSXXX :[タスク種別(2 文字)+タスク No.(3 文字)]
Status=[XXXXX] :LFC/IFC 図面の結合状態。
([Compiled]:結合済み、[Not Compiled]:結合未完)
[Note] :注意メッセージ。(変換は完了)
[Error] :警告メッセージ。(変換は未完)
[DW00000] :対象の変数名、またはシンボル名。
(01-002:004) :該当のシンボル位置情報。
({ワークシート No.}-{行 No.}:{列 No.})

B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 719
変換結果のログ(CnvLFCLog.txt)に出力されるメッセージの内容は以下のとおりで
す。
ID メッセージ 説明
0002 Draw Data Read Error 図面ファイルが読み込めませんでした。図面ファイルが正しいか確認してください。
0003 Draw Data Open Error 図面ファイルが開けませんでした。図面ファイルが正しいか確認してください。
0004 Text File Output Error 変換用中間ファイルが開けませんでした。ディスクに異常がないか確認してください。
0005 System Error メモリが不足していないか、またはディスクに異常がないか確認してください。
0050 Already existed. 変換先システムに同じ POU 名がありました。
0100 Number of the lines over. 図形(線)の数が制限値を超えました。
0101 Number of the figures over. 図形(楕円)の数が制限値を超えました。
0102 Number of the texts over. テキストボックスの数が制限値を超えました。
0103 Not supported line. サポート外の線種がありました。
0104 Not supported figure. サポート外の図形がありました。
0105 Changed the text direction. テキストの縦書きを横書きに変更しました。
0200 There is no custom symbol. 変換先システムに該当のカスタムシンボルが登録されていませんでした。
0201 Number of the symbols over. カスタムシンボルの数が制限値を超えました。
0202 Not supported TAG kind. サポート外のタグ種別がありました。
0203 Not supported TAG parameter. サポート外のタグパラメータがありました。
0204 Not supported variable. サポート外の変数がありました。(論理/物理アドレス等)
0205 Changed the variable. 変数名が変更されました。
0206 Terminals are different. シンボルの端子数が異なっていました。カスタムシンボルの登録を確認してください。
0207 Input terminal was omitted. シンボルの入力端子が省略されていました。結線が重なっていないか確認してください。
0208 Not supported option. サポート外の IFC シンボルのオプション指定がありました。
0209 Not supported qualifier. サポート外の IFC シンボルのクオリファイア指定がありました。
0210 Not supported symbol. サポート外の IFC シンボルがありました。
0211 There is no FUN/FBK. 変換先システムに該当の FUN/FBK が登録されていませんでした。
0500 Confirm the task kind. タスク種別の指定を確認してください。

付録B
E8C4890 720
■LFC 変換用のカスタムシンボル、およびユーザ FBK を作成する方法
LFC 図面にて、ユーザライブラリ(MCRBLK 以外)の LFC シンボルを使用している
場合は、以下の方法にて、カスタムシンボル、および関連するユーザ FBK を作成して
ください。
1) LFC ビルダで作成した LFC シンボルの端子番号、入出力、およびデータ型を確認
します。
(例)オンディレイ秒(TONS)の場合
TONS.1S
端子番号 入出力 データ型
1 入力 ビット
2 入力 整数
3 出力 ビット
2)プログラムエディタにて、LFC シンボルの動作に合わせたユーザ FBK を作成します。
3) 利用できる変数にて、ローカル変数の入出力引数を定義し、引数の宣言順、および
データ型を LFC シンボルの端子に合わせます。
(例)オンディレイ秒(TONS)の場合
※端子 1,2 が入力引数(VAR_INPUT)、端子 3 が出力引数(VAR_OUTPUT)に該当します。
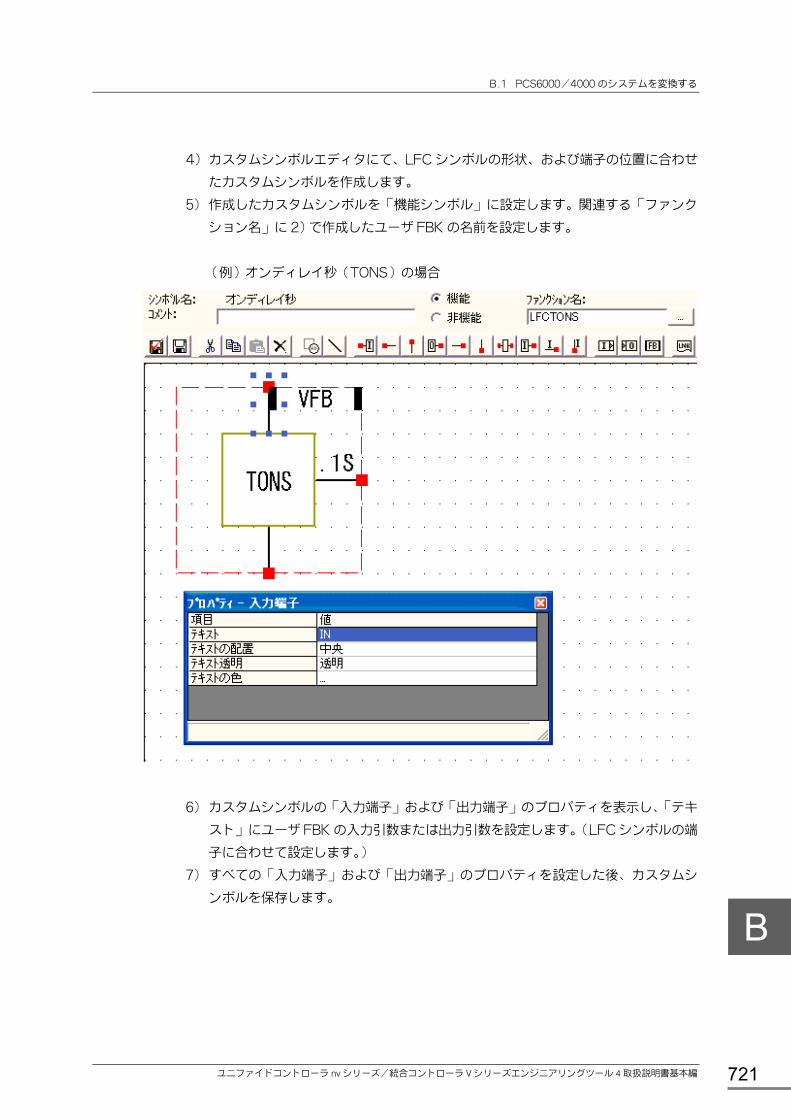
B.1 PCS6000/4000 のシステムを変換する
ユニファイドコントローラ nv シリーズ/統合コントローラ V シリーズエンジニアリングツール 4 取扱説明書基本編 721
4) カスタムシンボルエディタにて、LFC シンボルの形状、および端子の位置に合わせ
たカスタムシンボルを作成します。
5) 作成したカスタムシンボルを「機能シンボル」に設定します。関連する「ファンク
ション名」に 2)で作成したユーザ FBK の名前を設定します。
(例)オンディレイ秒(TONS)の場合
6) カスタムシンボルの「入力端子」および「出力端子」のプロパティを表示し、「テキ
スト」にユーザ FBK の入力引数または出力引数を設定します。(LFC シンボルの端
子に合わせて設定します。)
7) すべての「入力端子」および「出力端子」のプロパティを設定した後、カスタムシ
ンボルを保存します。

付録B
E8C4890 722

ユニファイドコントローラnvシリーズ/統合コントローラVシリーズエンジニアリングツール4 取扱説明書基本編
ご注意
⑴本書に掲載してある技術情報は、製品の代表的動作・応用を説明するためのもので、その使用に際しての当社および第三者
の知的財産権その他の権利に対する保証または実施権の許諾を行うものではありません。
⑵本書の内容の一部または全部を無断で転載することは禁止されています。
⑶本書の内容については、お断りなく変更することがあります。
⑷本書の内容については万全を期しておりますが、万一不可解な点や、誤り、お気づきの点がございましたら、ご一報くだ
さいますようお願いいたします。
PROSEC 、TOSLINE、TOSDIC、CIEMACは、株式会社 東芝の登録商標または商標です。
Microsoft、Windowsは、米国Microsoft Corporationの米国および他の国における登録商標です。
DeviceNetは、Open DeviceNet Vender Association Inc.の登録商標です。
2011年 9月 第4版 発行
発 行 株式会社 東 芝 社会インフラシステム社計測制御機器部
ⒸToshiba Corporation All Right Reserved. 2008-2011 無断複製および転載を禁ず(TDOC)

6E8C4890
取扱説明書基本編エンジニアリングツール4
4890.4.1109
ユニファイドコントローラ
nvシリーズ統合コントローラvseries
エンジニアリングツール4 取扱説明書基本編
ユニファイドコントローラnv シ
リーズ
統合コントローラvseries