escuela politÉcnica del ejÉrcito sede...
TRANSCRIPT

ESCUELA POLIT ÉCNICA DEL EJÉRCITO SEDE – LATACUNGA
CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN
PROYECTO DE GRADO PARA LA OBTENCIÓN DEL TÍTULO DE:
“INGENIERO ELECTRÓNICO”
“DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE CONTROL Y
VERIFICACIÓN DEL NIVEL DE LLENADO DE BOTELLAS UTILIZANDO
LabVIEW Y IMAQ VISIÓN”
CBOP. DE I. GAVILÁNEZ F. HÉCTOR M.
ALBÁN C. EDWIN D.
LATACUNGA – ECUADOR 2007

CERTIFICACIÓN
Certificamos, que el presente proyecto de grado fue desarrollado en su totalidad por
los señores CBOP. DE I. GAVILÁNEZ FERNÁNDEZ HÉCTOR MARCELO Y ALBÁN
CASTELLANOS EDWIN DANIEL, previo a la obtención de su Título de Ingeniero
Electrónico en Instrumentación.
Latacunga, Septiembre del 2007
_________________________
Ing. Julio Acosta
DIRECTOR
_________________________
Ing. Eddie Galarza
CODIRECTOR

AGRADECIMIENTO
A la Escuela Politécnica del Ejército Sede Latacunga y a sus docentes, por los
conocimientos impartidos en nuestra formación profesional, y especialmente a Ios
Ingenieros Julio Acosta y Eddie Galarza, por su acertada dirección y recomendaciones
durante el desarrollo del proyecto.

DEDICATORIA
A mi madre espiritual ―Santa Anita‖, quien con su bendición guía mi camino por el
sendero del bien, me cobija con sabiduría para culminar con mis metas y lo más
importante protege a las personas que más amo en ésta vida, MI FAMILIA.
Marcelo Gavilánez
El presente trabajo dedico a mi madre Carmita, por su infinito cariño y apoyo que he
recibido desde que me trajo al mundo, a mi abuelita por su ejemplo de sabiduría y
superación en los momentos difíciles del convivir diario, a Marcela por su amor,
respeto y comprensión incondicional durante ésta etapa de mi vida y las que están
por venir y a mi hijo Danny que ha sido la fuente de mi fuerza e inspiración para que
pueda culminar este duro camino y vencer los obstáculos que en el futuro se
presenten.
Daniel Albán

- 25 -
CONTENIDO
INTRODUCCIÓN……………………………………………………………… vi
CAPÍTULO I FUNDAMENTOS
1.1 INTRODUCCIÓN………………………..………………………………. 1
1.2 ANTECEDENTES………………………………………………………. 2
1.3 JUSTIFICACIÓN……………………………….………………….……. 2
1.4 IMAGEN....……………………………….…………………………………. 3
1.4.1 ¿Qué es una imagen?………………………………………………….. 3
1.4.2 ¿Cómo se construye la imagen en la pantalla del ordenador?...…. 4
1.4.2.1 Tipos de Imagen………………………………………………. 4
a. Imágenes raster o vectoriales……………………………… 4
b. Imágenes de mapa de bits o bitmap...…………………….. 4
c. Modelo de color RGB..……………………………………….. 5
1.4.2.2 Consideraciones básicas para obtener una buena imagen.. 6
a. Resolución del monitor.…………………………………........ 6
b. Resolución de la imagen……………………………………... 6
c. Profundidad de color………………………………………….. 6
1.4.3 Factores que afectan la calidad de la imagen en la pantalla………… 7
1.4.3.1 Configuración del hardware…………………………………….. 7
1.4.3.2 Condiciones de visualización…..……………………………….. 8
1.4.3.3 Características humanas…..……………………………………. 8
1.4.4 Adquisición de imágenes………………………………………………. 8
1.4.4.1 Consideraciones ópticas básicas para la adquisición……….. 8
1.4.4.2 El dispositivo de adquisición……………………………………. 9
1.4.4.3 Principio del procesamiento digital de imágenes……………… 10
1.4.5 Imágenes Digitales..……………………………………………………. 11
1.4.6. Despliegue de datos….………………………………………………… 11
1.4.7 Procesamiento de imagen……………………………………………… 12
- 26 -
1.5 CÁMARAS, TARJETAS Y LabVIEW-IMAQ VISIÓN…………………….… 12
1.5.1 ¿Qué es IMAQ?………………………………………………….……… 12
1.5.2 ¿Porqué se utiliza LabVIEW?........................................................... 13
1.5.3 Sistemas de visión artificial……………………………………………. 14
1.5.4 Sistemas de percepción artificial……………………………………… 15
1.5.5 Instrumentación Virtual…………………………………………………. 16
1.5.6 Componentes de un sistema de visión basado en PC……………… 19
1.5.6.1 Iluminación…..………………………………………………….. 20
1.5.6.2 Lentes y óptica………………………………………………….. 20
1.5.6.3 Cámara…………………………………………………………... 21
1.5.6.4 Plug-in IMAQ hardware (tarjeta)……………………………….. 21
1.5.6.5 Software de aplicación………………………………………….. 21
1.5.6.6 Estándar FireWire IEEE 1394…………………………………. 21
a. Características del estándar FireWire IEEE-1394…………. 22
b. Ventajas de FireWire………………………………………….. 23
CAPÍTULO II DISEÑO E IMPLEMENTACIÓN
2.1 ESPECIFICACIÓNES DEL SISTEMA………………………………………… 24
2.2 DESCRIPCIÓN DEL PROCESO……………………………………………... 25
2.3 OBJETO A EXAMINAR………………………………………………………… 26
2.4 CÁMARA DE VIDEO + ÓPTICA………………………………………………. 28
2.4.1 Selección de la cámara………………………………………………….. 28
2.4.2 Cámara digital FIRE-ITM………………………………………………….. 31
a. Características principales…………………………………………... 32
b. Requerimientos para el funcionamiento……………………………. 33
c. Especificaciones de la cámara digital Fire- ITM…………………….. 34
2.4.3 Óptica………………………………………………………………………. 35
a. Nivel de detalle………………………………………………………... 38
2.5 ILUMINACIÓN Y ACONDICIONAMIENTO DE LA IMAGEN
2.5.1 Características de la superficie………………………………………….. 39
2.5.2 Técnicas de iluminación………………………………………………….. 40
2.5.3 Requisitos fundamentales para obtener un buen contraste en la
zona de interés…………………………………………………………….. 41

- 27 -
2.5.4 Sistema de iluminación implementado………………………………….. 42
2.6 NI-IMAQ DRIVER SOFTWARE………………………………………………… 45
2.7 DESCRIPCIÓN DEL SISTEMA DE SENSADO……………………………… 46
2.7.1 Aplicaciones Típicas……………………………………………………... 47
2.7.2 Especificaciones
2.8 ADQUISICIÓN DE LA SEÑAL SENSADA……………………………………. 48
2.8.1 Preparación del hardware………………………………………………... 49
2.8.2 Conector I/O……………………………………………………………….. 50
2.8.3 Descripción de señales…………………………………………………… 51
2.8.4 Circuito digital I/O…………………………………………………………. 52
2.9 SISTEMA NEUMÁTICO…………………………………………………………. 53
2.9.1 Compresor…………………………………………………………………. 53
a. Uso de los compresores……………………………………………… 53
b. Mantenimiento…………………………………………………………. 54
2.10 RELÉS……………………………………………………………………………. 54
2.10.1 Características Técnicas……………………………………………….. 55
a. Parte electromagnética……………………………………………….. 55
b. Contactos o Parte mecánica………………………………………….. 56
2.10.2 Relés más utilizados…………………………………………………….. 56
a. De armadura…………………………………………………………… 56
b. De núcleo móvil………………………………………………………… 56
2.11 ELECTROVÁLVULAS…………………………………………………………….. 57
2.11.1 Válvulas reguladoras de flujo o caudal…..……………………………. 58
a. Válvula estranguladora………………………………………………… 58
b. Válvula estranguladora unidireccional……………………………… 58
c. Válvulas reguladoras de presión………...………………………….. 58
2.11.2 Elementos de trabajo, actuadores neumáticos……………………….. 58
a. Cilindros………………………………………………………………… 58
b. Actuadores de giro…...………………………………………………... 58
2.11.3 Motores neumáticos…………………………………………………….. 59
2.11.4 Cilindros de simple efecto………………………………………………. 59
2.11.5 Cilindros de doble efecto……………………………………………….. 59
2.12 LabVIEW………………………………………………………………………….. 60
2.12.1 Aplicaciones de labVIEW………………………………………………. 60

- 28 -
2.12.2 Programación gráfica con labVIEW……………………………………. 60
2.12.3 Entorno labVIEW…………………………………………………………. 60
2.12.4 NI VISIÓN………………………………………………………………….. 61
2.13 VISUALIZACIÓN DE LA IMAGEN EN LabVIEW…..………………………… 62
2.13.1 Panel frontal……………………………………………………………… 62
2.13.2 Diagrama de bloques…………………….……………………………… 62
2.14 PROGRAMACIÓN EN LabVIEW……………...………………………………. 65
2.14.1 Procesamiento de la imagen…………………………………………… 66
a. SubVI Encontrar Bordes………………………………………………. 68
b. SubVI Encontrar Nivel (Find Level)…………………………………... 70
c. SubVI Media……………………………………………………………. 72
d. SubVI Historial (History)………………………………………………. 73
2.13.2 Entrada/Salida digital de datos………………………………………… 74
CAPÍTULO III RESULTADOS Y PRUEBAS EXPERIMENTALES
3.1 GENERALIDADES……………………………………………………………… 77
3.2 CONSTRUCCIÓN DEL CONJUNTO DE INSPECCIÓN…………………… 77
3.2.1 Construcción del armario……………………………………………….. 78
3.2.1.1 Construcción de la cámara de iluminación…………………. 78
3.2.1.2 Adecuación del armario para la señal del sensor…………... 79
3.3 PRUEBAS EXPERIMENTALES………………………………………………. 81
3.3.1 Descripción física del sistema………………………………………… 81
3.3.2 Prueba de unidades……………………………………………………... 82
3.3.3 Pruebas de sensor………………………………………………………… 82
3.3.4 Pruebas de la cámara de iluminación…………………………………... 82
3.3.5 Pruebas de movimiento de banda trasportadora……………………… 82
3.3.6 Pruebas de circuito neumático…………………………………………… 82
3.4 ANÁLISIS TÉCNICO ECONÓMICO…………………………………………… 83
3.5 ALCANCES Y LIMITACIONES………………………………………………… 84
3.5.1 Alcances……………………………………………………………………. 84
3.5.2 Limitaciones……………………………………………………………….. 85

- 29 -
CAPÍTULO IV CONCLUSIONES Y RECOMENDACIONES
4.1 CONCLUSIONES………………………………………………………............... 87
4.2 RECOMENDACIONES…………………………………………………………... 89
4.3 BIBLIOGRAFÍA…………………………………………………………………… 90
ANEXOS
A Glosario de Términos.
B Configuración de la cámara Fire-ITM
C Configuración del MAX (Measurement &Automation Explorer) para la
NI USB-6009
D Manual de operación

- 30 -
INTRODUCCIÓN
Hoy en día los sistemas de visión artificial se han constituido en una las formas más
estrictas en el control de calidad de los diferentes productos de consumo masivo que
existen en el mercado, este control permite reemplazar la inspección tradicional que
se lo hacia en forma visual y poco exacta, además en muchos casos esta inspección
no se la podía realizar en productos que se encontraban en zonas poco accesibles
y riesgosas para el ser humano.
En base a esta necesidad, el presente proyecto suplirá la inspección visual para el
control de calidad, el mismo que se lo realizará mediante un estudio técnico del
diseño tanto de software como de hardware, para luego concluir con la
implementación y construcción de todo el proceso, tomando en consideración todos
los factores físicos que intervendrán en el funcionamiento.
Este proceso se fundamenta en retirar las botellas que circulan por una banda
transportadora, que se encuentren fuera del nivel de líquido preestablecido por el
operador. Para la realización de este proceso el prototipo consta de un armario, en
cuyo interior se encuentra una cámara de iluminación que permite contrastar el
líquido del envase, en este armario se encuentra también un sensor que detecta la
presencia de la botella permitiendo que la cámara realice una toma de la imagen, la
misma que será analizada por el software de inspección (labVIEW y IMAQ Visión).
Para la clasificación de botellas correctas e incorrectas, se utiliza un sistema de
control neumático que se activa cada vez que el nivel de líquido no corresponda al
asignado.
Este sistema podrá satisfacer la inspección de nivel de líquido de botellas de
cualquier tamaño, forma e incluso color, siempre y cuando éste no sea transparente
y posea el mismo color del envase.

- 31 -
Una Interfaz Hombre-Máquina, HMI, es un mecanismo que permite a un operador
interactuar con un proceso y determinar el estado o magnitud de los dispositivos que
están presentes en una planta o proceso industrial. La interfaz puede ser tan simple
como una lámpara indicadora del estado de un aparato, hasta una o varias pantallas
desarrolladas en una computadora que llegan a mostrar en la pantalla del monitor
representaciones esquemáticas de todo el proceso bajo supervisión.
El programa labVIEW, entre otros, de National Instruments, constituye una
plataforma de desarrollo que facilita el diseño de las HMI en PCs. Algunos de estos
paquetes de desarrollo incluyen muchas herramientas poderosas que permiten el
desarrollo de HMI‘s de mucho potencial de procesamiento así como la comunicación
con dispositivos externos.
El presente proyecto de tesis de grado titulado ―Diseño e Implementación de un
Sistema de Control y Verificación del Nivel de Llenado de Botellas Utilizando
LabVIEW y IMAQ Visión‖ tiene como objetivo central diseñar, construir e
implementar un sistema de visión artificial, apoyado de la plataforma de
programación labVIEW, de una tarjeta de adquisición de datos, de un protocolo
adecuado de comunicación y de un circuito de control neumático.
El HMI del sistema, implementado en labVIEW, dispone de tres pantallas gráficas
amigables y sencillas, en las cuales se podrá realizar la calibración del nivel que se
desea analizar, observar el número de botellas correctas e incorrectas así como su
total en forma gráfica y numérica.
Para cumplir con todo lo expuesto anteriormente, el presente proyecto está
estructurado, en un documento escrito y en un prototipo diseñado e implementado,
de varios capítulos, los cuales en una forma resumida contienen la siguiente
información.
En el Capítulo I, se presenta marco teórico, donde se menciona los antecedentes y
justificación del proyecto así como también conceptos básicos de hardware y
software utilizados en el prototipo.

- 32 -
En el Capítulo II, hace referencia al principio de funcionamiento de los principales
dispositivos electrónicos empleados en este proyecto, además se presenta el diseño
del software de aplicación así como también la selección de materiales y elementos
que serán necesarios para el funcionamiento del prototipo.
En el Capítulo III, se detallan la construcción del prototipo, así como también de sus
componentes, los resultados de las pruebas experimentales, y un análisis técnico
económico del proyecto.
Se registran al final conclusiones y recomendaciones para futuros proyectos que se
desee realizar con visión artificial, así como el manual de operación.

- 33 -
CAPÍTULO I
FUNDAMENTOS
1.1 INTRODUCCIÓN
En la actualidad los sistemas de visión artificial se han constituido en una
herramienta de gran ayuda para el hombre optimizando el trabajo que se lo realizaba
a mano, generando para la empresa un ahorro del recurso humano y obteniendo al
mismo tiempo rentabilidad mediante la optimización y adaptación de sistemas de
control que en conjunto con visión artificial harán el trabajo especificado en menor
tiempo y con mejor garantía.
En el presente proyecto, “Diseño e Implementación de un Sistema de Control y
Verificación del Nivel de Llenado de Botellas Utilizando LabVIEW
y IMAQ Visión” se pretende desarrollar un sistema de visión artificial para la
Inspección de nivel de llenado de botellas. Las botellas viajarán por una cinta
transportadora, y el sistema será capaz de detectarlas y realizar el control de calidad
sobre las mismas. Para llevar a cabo el proyecto, se dispone de una cámara digital
FIRE-iTM, una tarjeta adquisición FIREWIRE IEEE 1394 y el software necesario para
diseñar, depurar e implementar aplicaciones de visión artificial (librerías de IMAQ
Visión de LabVIEW, específicas para el diseño de sistemas de visión artificial).
1.2 ANTECEDENTES

- 34 -
En la actualidad los esquemas de control de calidad aplicados a la industria, en los
cuales el volumen de producción está marcado por la alta demanda de los
productos, a la que se agrega una competencia cada vez mayor por parte de los
productores, hacen necesario establecer estándares cada vez más estrictos para
incrementar la calidad de los productos.
Lo anterior se consideraba obligatorio en procesos industriales sin embargo, en
muchas industrias las tecnologías y esquemas de trabajo no han ido evolucionando.
El proceso de verificación de llenado en las distintas envasadoras del país se lo
hace visualmente y la selección se realiza en forma manual, lo cual limita tiempos de
trabajo pues entre cada proceso existen tiempo muertos que afectan a toda la
cadena de producción, incluyendo el transporte del producto a los distintos
mercados.
Es necesario notar que este esquema de trabajo lleva implícito el riesgo de
contaminación del producto.
1.3 JUSTIFICACIÓN
El proceso de verificación de llenado de botellas en nuestro país es
fundamentalmente manual. Utiliza técnicas sencillas y en muchos casos se necesita
de recurso humano para el chequeo continuo, por lo que se requiere de una gran
precisión por parte de aquellos que las realizan, debido a que la selección depende
de la observación y el criterio que tenga el operario sobre los aspectos que se
evalúan.
La finalidad de este sistema es automatizar las actividades que involucran el proceso
de nivel de llenado, basado en el reconocimiento, análisis y gestión de la imagen,
integrando todas las variables en una sola respuesta real y confiable que permita, a
diferencia de los métodos tradicionales, obtener un diagnóstico exacto,
disminuyendo costos y aumentando la calidad.
Por tales motivos se necesita del desarrollo eficiente de este proceso, mismo que
considera de la siguiente manera:

- 35 -
Se requiere realizar el estudio del software LabVIEW y IMAQ Visión, acompañado
de una estructura mecánica óptima, un diseño neumático acorde y un adecuado
control electrónico para lograr un sistema de supervisión y clasificación que ofrezca
un alto grado de confiabilidad y tecnificación a las empresas que decidan optar por
esta tecnología poco utilizada en el país.
1.4 IMAGEN
1.4.1 Que es una imagen?
La imagen digital, bien sea generada por el ordenador o bien creada a través de
algún instrumento de captura, tal como una cámara o un escáner, supone la
traducción de los valores de luminosidad y color a un lenguaje que pueda entender
el ordenador y los periféricos con él relacionados, esto es, un lenguaje digital. La
principal ventaja aportada por este lenguaje es la estabilidad: mientras que la
emulsión de una imagen fotográfica clásica sufre una degradación química con el
paso del tiempo, que repercute en la calidad de dicha reproducción, los ceros y unos
que componen una imagen digital permanecen estables, con lo que la imagen no
variará a lo largo del tiempo1
El interés principal que puede suscitar la imagen digital, especialmente cuando se
plantea su utilización didáctica, proviene de la posibilidad de construir y distribuir
mensajes en los que la incorporación de imágenes puede enriquecer el contenido de
la información sin tener que recurrir a costosas inversiones de equipamiento o
reproducción.
1.4.2 Cómo se construye la imagen en la pantalla del ordenador2
Podría considerarse la pantalla del ordenador como un panal formado por celdas
cuadradas (píxel). Cada píxel es un elemento fotosensible de estado sólido que
genera y almacena una carga eléctrica cuando es iluminado. El píxel o sensor es el
1PAJARES Gonzalo, DE LA CRUZ Jesús ―Visión por computador, imágenes digitales y aplicaciones‖,
Universidad complutense de Madrid, Madrid – España, 2002.
2 http://www.educa.madrid.org/web/cap.hortaleza/Cursofoto/generalidades.htm

- 36 -
bloque básico constructivo de una imagen CCD. En la mayoría de configuraciones el
sensor incluye una circuitería que almacena y transfiere su carga hacia un registro
de desplazamiento. Éste convierte la matriz de cargas espaciales de la imagen CCD
en una imagen de vídeo variable en el tiempo
1.4.2.1 Tipos de imagen
A grandes rasgos podríamos dividir las imágenes digitales en dos grandes grupos:
a. Imágenes raster o vectoriales.
En las que la información de cada uno de los puntos se recoge en forma de
ecuación matemática que lo relaciona con el resto de los puntos que forman la
imagen. Ofrece la gran ventaja de que la calidad de la imagen no varía al modificar
el tamaño, ya que la información de cada punto no es absoluta sino relativa al resto
de la imagen. Además, debido a su definición matemática apenas ocupa espacio, ya
que una fórmula que represente su forma es suficiente para representar todos los
puntos que la componen, es el tipo adecuado para el diseño de línea y figura y no es
soportado de forma directa por los programas navegadores de Internet.
b. Imágenes de mapa de bits o bitmap
Se construyen describiendo cada uno de los puntos que componen la imagen y
llevan, por tanto, información acerca de la posición absoluta y el color de cada uno
de ellos. Podríamos decir que cada punto sería la tesela de un mosaico con sus
propias características. La ventaja que presenta este formato es la posibilidad de
recoger una amplísima gama tonal, por lo que es el tipo adecuado para representar
imágenes captadas de la realidad. A cambio, la variación de tamaño supondrá
modificaciones en la calidad, ya que el número de celdas que forman la imagen
permanece invariable, por lo que un aumento del tamaño hace que el único recurso
posible sea ampliar el tamaño de cada una de ellas.
Se deduce por lo dicho anteriormente que su tamaño es muy grande, ya que aquí sí
se tiene información de cada uno de los puntos que forman la imagen. Dentro de
este tipo se encuentran muchos formatos, algunos de los cuales son soportados
directamente por los navegadores.

- 37 -
c. Modelo de color RGB
La descripción RGB (del inglés Red, Green, Blue; "rojo, verde, azul") de un color
hace referencia a la composición del color en términos de la intensidad de los
colores primarios con que se forma: el rojo, el verde y el azul. Es un modelo de color
basado en la síntesis aditiva, con el que es posible representar un color mediante la
mezcla por adición de los tres colores luz primarios. Cabe destacar que el modelo
de color RGB no define por sí mismo lo que significa exactamente rojo, verde o azul,
razón por la cual los mismos valores RGB pueden mostrar colores notablemente
diferentes en diferentes dispositivos que usen este modelo de color. Aunque utilicen
un mismo modelo de color, sus espacios de color pueden variar considerablemente.
Para indicar con qué proporción mezclamos cada color, se asigna un valor a cada
uno de los colores primarios, de manera, por ejemplo, el valor 0 significa que no
interviene en la mezcla, y a medida que ese valor aumenta, se entiende que aporta
más intensidad a la mezcla. Aunque el intervalo de valores podría ser cualquiera
(valores reales entre 0 y 1, valores enteros entre 0 y 37, etc), es frecuente que cada
color primario se codifique con un byte (8 bits). Así, de una manera estándar, la
intensidad de cada una de las componentes se mide según una escala que va del 0
al 255.
1.4.2.2 Consideraciones básicas para obtener una buena imagen
a. Resolución del monitor
A grandes rasgos la resolución del monitor viene determinada por dos variables:
El tamaño de la "celda", al que se denomina pitch dot y que en los monitores
actuales es, habitualmente, de 0,28 mm. Dado que la imagen que se observa está
compuesta por puntos adyacentes de diferentes colores, cuantos más pequeños
sean dichos puntos se obtendrá una mayor sensación de continuidad, el número de
puntos que es capaz de enviar a la pantalla la tarjeta gráfica del ordenador. Este

- 38 -
parámetro depende de la cantidad de memoria de la que disponga la tarjeta para
hacer los cálculos necesarios. Actualmente la resolución más habitual es de 800
puntos horizontales por 600 puntos verticales, mientras que en los equipos
precedentes se situaba en 640x480 puntos. La variación del número de puntos
influirá en el tamaño relativo de las imágenes dentro de la pantalla, ya que al ser fijo,
la imagen ocupará un fragmento menor o mayor de la superficie de la misma según
la cantidad total de puntos que se hayan representado en ella.
b. Resolución de la imagen
Es un concepto relacionado con el anterior y como ejemplo práctico para explicarlo.
Cuando se captura una imagen con la cámara y se la imprime se comprueba que
tiene unas dimensiones físicas. Se puede comprobar que la cámara ha captado la
imagen a una resolución de 72 píxeles por pulgada.
c. Profundidad de color
Se llama profundidad de color a la cantidad de colores diferentes que pueden
presentarse en una imagen. Para almacenar esta información se asigna un número
de bits para indicar el color de cada píxel3.
Imaginen un píxel blanco o negro: sólo harían falta dos posiciones para indicar si
está encendido (1) o apagado (0), esto es 1 bit.
Si se quisiera saber el color de un píxel en una imagen de 16 colores se necesita
(24)=16 combinaciones diferentes, esto es 4 bits y así sucesivamente. Los bits
necesarios para cada profundidad de color se muestran en la tabla 1.1.
Tabla 1.1 Progresión
Número de bits Combinaciones posibles Número de colores
8 28 256
16 216 aprox. 65000
24 224 aprox. 16,7 millones
3 http://www.educa.madrid.org/web/cap.hortaleza/Cursofoto/generalidades.htm

- 39 -
La importancia de esta progresión reside en que, al aumentar el número de colores
posibles en la imagen se está incrementando inevitablemente el espacio necesario
para almacenarla.
Más aún cuando se captura una imagen con un dispositivo que permita elegir
resolución tal como un escáner, se suele pensar que una mayor cantidad de píxeles
por pulgada nos permitirá obtener una mayor fidelidad con respecto al original, con
lo que el tamaño de las imágenes se hace verdaderamente monstruoso.
(Recordemos que la resolución de la pantalla es invariable, por lo que si tiene que
representar una imagen de alta resolución esta ocupará más en la pantalla, pero no
mejorará su tamaño de impresión desde un programa de tratamiento de imagen).
1.4.3 Factores que afectan la calidad de la imagen en la pantalla
1.4.3.1 Configuración del hardware
Es difícil recomendar una configuración de hardware ideal. La regla general es armar
un sistema que pueda satisfacer sus necesidades de velocidad, memoria,
almacenamiento y calidad de presentación. ¿Qué clase de imágenes se están
creando? ¿Qué cantidad? ¿Con qué fines? ¿Qué nivel de revisión en pantalla se
necesita? Necesitará una computadora rápida y confiable con una amplia capacidad
de procesamiento y memoria para poder recuperar y manipular los grandes archivos
que está creando, especialmente al crear imágenes en color.
1.4.3.2 Condiciones de visualización
Se debe comprender que la cámara y el objeto requieren condiciones de
visualización similares. Se podrá visualizar mejor al objeto en un ambiente con
mucha luz. Sin embargo, un entorno con poca luz no se equipara a un cuarto oscuro.
Vista en la oscuridad, una imagen en pantalla parecería carecer de suficiente
contraste.
1.4.3.3 Características humanas
La evaluación de la calidad de la imagen requiere sofisticación visual, especialmente
para las evaluaciones subjetivas. Idealmente, la misma persona debe evaluar todas
las imágenes, con el mismo equipo y bajo los mismos parámetros. El personal debe

- 40 -
ser entrenado en particular en lo que se refiere a cómo transmitir en forma efectiva la
información sobre la apariencia del color.
1.4.4 Adquisición de imágenes.
1.4.4.1 Consideraciones ópticas básicas para la adquisición.
Cuando se adquieren imágenes, hay algunos términos que se deben de entender
para poder armar un mejor ambiente de captura de imágenes. El campo de visión es
el área del objeto bajo inspección que la cámara esta viendo. La distancia de trabajo
es la distancia del frente del lente hasta el objeto sobre inspección. La resolución es
la capacidad del sistema que tiene para distinguir objetos pequeños. Profundidad de
campo es la distancia máxima que el objeto puede estar sin salirse de enfoque. Por
ultimo el tamaño del sensor, este es el tamaño activo del área del sensor, el cual es
especificado por la dimensión horizontal del mismo tal como se observa en la figura
1.1.
Figura 1.1. Parámetros ópticos de imagen.
1.4.4.2 El dispositivo de adquisición.

- 41 -
Cuando se capturan imágenes, se debe considerar el tipo de aplicación, nivel de
aplicación y calidad requerida para la imagen. Al momento de considerar que
cámara será la adecuada, muchas preguntas necesitan ser respondidas. Por
ejemplo, ¿Debería ser una cámara análoga o una cámara digital? ¿debería la
cámara ser escáner de área o escáner de línea? ¿Debería la cámara tener la
capacidad de capturar imágenes fuera del visible espectro de la luz?
Las cámaras análogas son altamente usadas y entendidas; estas tienden a tener
cableado simple y una instalación fácil de ejecutar. Otro beneficio de las cámaras
análogas es que se pueden usar con algunos monitores directamente, lo cual
simplifica la instalación y configuración. Para principiantes, una cámara
monocromática (sólo tonos de gris) de bajo precio sería una buena elección para la
mayoría de aplicaciones. Por otra parte, una cámara digital tiene varias
características propias tales como alta velocidad de transferencia de imágenes, alta
resolución de píxel y espacial, así como gran inmunidad al ruido.
Al utilizar una cámara digital obviamente ya no se necesitaría digitalizar la imagen
para introducir al computador, caso contrario con las cámaras análogas cuyas
imágenes necesariamente necesita ser digitalizada empleando para esto una tarjeta
digitalizadora de imágenes.
Adicionalmente, se sabe que el video análogo es más susceptible al ruido durante la
transmisión que el video digital. En el caso de las cámaras IEEE-1394, se pueden
poner a trabajar en paralelo en la alguna red local o exterior.
Tabla 1.2 Características generales de las cámaras.
Cámaras Análogas
Cámaras Digitales
Mas baratas.
Comúnmente usadas y fácil de usar.
Cableado simple.
Compatible con algunos monitores.
Mejor resolución espacial.
Mayor velocidad de transferencia.
Mayor profundidad de píxel.
Mayor inmunidad al ruido.
Conectividad en red (IEEE -1394).

- 42 -
1.4.4.3 Principio del procesamiento digital de imágenes
Procesamiento de imágenes es el término usado para denominar las operaciones
desarrolladas sobre un set de datos de imagen para mejorarlas de alguna forma,
para ayudar a su interpretación o para extraer algún tipo de información útil de ella.
Es obvio que el procesamiento de imágenes no puede producir información a partir
de nada. Si en el set de datos no existe información concerniente a una aplicación o
interpretación en particular, entonces no importa que cantidad de complicadas
rutinas de procesamiento que se aplique, no se podrá obtener información.
1.4.5 Imágenes digitales
Los sistemas adquieren los datos píxel a píxel. La imagen es guardada como una
grilla de píxeles. La radiancia (sensores visibles e IR) de cada uno de esos píxeles
es registrada por el detector y entonces es digitalizada para permitir su manipulación
por parte del computador. Las radiancias podrán tomar cualquier valor entre 0 y
Rmax, que es el número de intervalos digitales que están disponibles y dependen
del número de bits del convertidor análogo-digital Rmax=2n-1, donde n es el número
de bits.

- 43 -
El proceso de digitalización transforma datos análogos continuos en datos digitales
discretos, un número finito de valores enteros es usado para representar todos los
valores de los datos originales y continuos.
1.4.6 Despliegue de los datos
Hasta aquí los datos han sido grabados, digitalizados y guardados en la forma de
una grilla de píxeles, si los datos fueron adquiridos por algún sensor capaz de
producir imágenes, los datos pueden mostrarse en un monitor.
Para que los datos sean mostrados en pantalla, el computador asigna a cada valor
entero (o rango de ellos) un color en particular, de forma tal que pueda ser
distinguido visualmente. Existen diferentes métodos de codificar los datos en color.
Codificación (paleta) arco iris (rainbow encoding): Cada valor digital es asignado
a
un color diferente, arbitrariamente elegido. Ej. 0= rojo, 1= azul,.... 255= amarillo.
Codificación (paleta) en escala de grises: A cada valor se le asigna un nivel de
gris,
generalmente en un orden ascendente. Ej. 0= negro, 1= gris oscuro,..,254= gris
claro, 255= blanco.
Codificación (paleta) en escala de colores: A cada valor se le asigna un solo nivel
de color, generalmente en un orden ascendente. Ej. 0= rojo oscuro,..., 255= rojo
claro.
La codificación en escala de color se puede usar cuando se necesita mostrar más de
una imagen; asignando a cada imagen una escala de colores, por ejemplo rojo,
verde, azul.
Luego se muestran las tres una sobre otra, produciéndose un compuesto en falso
color. Esta técnica es muy utilizada para desplegar los datos de sensores
multiespectrales o para mostrar datos de una misma área a diferentes tiempos.
1.4.7 Procesamiento de imagen.

- 44 -
La digitalización deja los datos con un formato adecuado para su manipulación por
parte del computador. Éstos pueden ser ahora transformados en cualquier función
matemática asociada, cada uno desarrollando una tarea diferente. La secuencia de
tareas aplicadas a una imagen se denomina ―procesamiento de imágenes‖, la cual
puede variar dependiendo de las metas que se tengan en vista.
1.5 CÁMARAS, TARJETAS Y LABVIEW-IMAQ VISIÓN
1.5.1 Qué es IMAQ?
Es un conjunto de herramientas para el desarrollo de aplicaciones relacionadas con
la adquisición y el procesado de la imagen. Dentro del conjunto de aplicaciones, se
pueden distinguir dos grandes bloques:
IMAQ Visión Builder: es una herramienta que sirve para realizar pruebas y ensayos
en aplicaciones de procesado de imágenes. Permite construir de manera intuitiva
algoritmos hechos a medida, a la vez que también permite ejecutarlos para
comprobar su funcionamiento4.
IMAQ Visión for G: es un conjunto de funciones disponibles en LabVIEW que
permiten crear aplicaciones para el tratamiento y procesado de la imagen. La
funcionalidad es la misma que se consigue con IMAQ Visión Builder, pero en este
caso la aplicación se ejecuta desde LabVIEW, con las ventajas que ésto conlleva.
El IMAQ Visión Builder incluye una potente aplicación que permite traducir el
algoritmo que se ha creado a partir de Labview. Con esto se ahorra mucho tiempo,
ya que es mucho más rápido crear y probar algoritmos con IMAQ Visión Builder que
con LabVIEW.
1.5.2 Por qué se utiliza LabVIEW?
Tradicionalmente, la mayoría de aplicaciones de control o de adquisición de datos se
programaban en lenguajes de alto nivel muy potentes tales como el C, Pascal,
4 National Instruments, ―IMAQ Vision Builder Tutorial‖ – 1999.

- 45 -
Basic, etc. El problema de estos lenguajes es que no proporcionan la posibilidad de
realizar la programación de forma gráfica, con lo que ello implica. Por otro lado,
existen lenguajes como el Visual C++ o Visual Basic que permiten trabajar con
entornos gráficos, pero son mucho más complejos en su utilización a nivel de
usuario. En cambio, LabVIEW permite por un lado diseñar las pantallas que verá el
usuario y a través de las cuales interaccionará con el proceso a controlar. Por otro
lado, este software permite realizar el diseño de las diferentes subrutinas de control
de manera simplificada y ordenada, pudiendo ser llamadas desde el programa
principal.
La programación en LabVIEW se podría comparar con una placa de circuito
impreso, ya que por un lado se tienen componentes electrónicos (transistores,
resistencias,..) que es lo que realmente el usuario ve por pantalla. Los terminales de
cada elemento que aparece por pantalla se ratearán a los bloques funcionales
(circuitos integrados) para generar los datos que se deseen visualizar. La
programación se realiza de manera gráfica (editando y conectando iconos), por lo
que las aplicaciones se crean de manera intuitiva (plasmando las ideas sobre
diagramas de bloques). Todo ésto se produce sin escribir ni una sola línea de
código.
Otro de los motivos de la utilización de LabVIEW es que el lenguaje incorpora una
gran cantidad de drivers para el control de instrumentos de laboratorio y periféricos
del PC (GPIB, RS232...). Todo ésto facilita mucho el trabajo y aporta flexibilidad al
sistema.
1.5.3 Sistemas de Visión Artificial
En el entorno industrial, se busca cada vez más la productividad (procesos más
eficientes), además, estos niveles de productividad tienen que ir asociados con unos
altísimos niveles de calidad del producto acabado. Por este motivo, es importante
tener un control exhaustivo sobre el proceso productivo.
Una de las soluciones que se solía adoptar era la de ubicar diversos controladores a
lo largo de la línea productiva. De esta manera, se podría detectar fallas en los

- 46 -
productos (mediante inspección ocular). El gran inconveniente de este tipo de testeo
parece claro, ya que la capacidad humana para realizar procesos repetitivos se
reduce increíblemente cuando además se requiere un gran nivel de precisión en la
inspección.
Gracias a la constante reducción en costos y a la gran capacidad de los
ordenadores, se puede llegar a sustituir el cometido de una persona por un sistema
de visión artificial. De esta manera, se potencian las funciones del control de calidad
de forma sustancial (la fatiga humana es inexistente y la precisión del control es
mucho mayor). Por tanto, la fiabilidad de estos sistemas de control con respecto a la
observación meramente visual es indiscutible.
Sin embargo, también presentan algunos inconvenientes: son instalaciones hechas
a medida, por lo que el costo de implementación es bastante elevado. Además, se
requiere realizar un entrenamiento del sistema y ajustar su funcionamiento. El
problema radica en que se depende mucho del entorno en el que se trabaja, de
manera que factores como la iluminación y la contaminación ambiental son
cruciales. Es por estos inconvenientes que no se acaba de ver clara la sustitución de
los tradicionales controles de calidad por estas nuevas herramientas automatizadas.
En el campo de la electrónica se tiene un ‗nicho‘ por explotar. Es un mercado en el
que el control de calidad es más complicado (tamaño de pistas, componentes mal
insertados,…).Por este motivo, y si la producción es elevada, un sistema de visión
artificial para el control de calidad es muy recomendable.
1.5.4 Sistemas de percepción artificial
En términos generales, un sistema de percepción artificial es un sistema electrónico
multisensor capaz de obtener, procesar, analizar y reconocer información relativa al
medio donde se encuentra. Los bloques constituyentes de un sistema de percepción
artificial, con mayor o menor grado de flexibilidad, son los que se muestran a
continuación en la figura 1.2:

- 47 -
Figura 1.2 Diagrama de bloques
Los sensores son los que permiten obtener señales medibles características del
medio que se está analizando. El acondicionamiento de señal se encarga de extraer
las características más relevantes procedentes del sistema multisensor. Esta
información compacta se denomina patrón. El sistema de reconocimiento de
patrones analiza esta información, de manera que es capaz de aprender, categorizar
y reconocer los patrones. Los actuadores son un elemento que no forma parte del
sistema de percepción propiamente dicho, pero que normalmente se incluye en la
mayoría de aplicaciones si se quiere actuar en función de la toma de decisión del
sistema.
1.5.5 Instrumentación Virtual
Los sistemas de visión y procesado de imágenes basados en PC representan una
alternativa a los sistemas convencionales. Utilizando una cámara, una lente y un PC
con el software y el hardware apropiado (tarjeta de adquisición principalmente), se
puede desarrollar un sistema automático de inspección (tanto para control de
calidad como para sistemas de medida de alta precisión).
Impulsado por la convergencia de diversas tecnologías, aplicaciones de visión y
procesado de imagen basada en PC es hoy en día una realidad. Los avances
tecnológicos conseguidos, juntamente con la asombrosa evolución del PC (con
micros más potentes y robustos, sistemas operativos más estables), han hecho

- 48 -
posible que el usuario final pueda hoy en día desarrollar aplicaciones de procesado
de imagen que antes estaban reservadas a auténticos especialistas o a empresas
de gran poder adquisitivo.
Gracias a la instrumentación virtual y a la convergencia de al menos cuatro
tecnologías, ha sido posible que hoy en día se pueda hablar de aplicaciones de
procesado de imagen basadas en PC. A continuación, se muestra en la figura 1.3,
lo expuesto:
Figura 1.3 Convergencia de tecnologías
Cada una de estas cuatro tecnologías (Software y hardware IMAQ y DAQ; Bus local
PCI; Avances en CPU; Sistemas operativos mas robustos) tiene un papel
fundamental en el avance de los sistemas de procesado de imagen, en los que el
PC ha sido un factor trascendental para el desarrollo de este tipo de aplicaciones.
Gracias al PC, la instrumentación virtual, es decir, la utilización del PC para realizar
funciones de instrumentos de medida, ha sido una realidad desde hace unos años.
Lógicamente, se han aprovechando los beneficios de las CPU‘s más potentes y
sistemas operativos más robustos, junto con canales de comunicación (bus local
PCI) más rápidos y flexibles.

- 49 -
Los sistemas de procesado de imagen son parte del modelo de instrumentación
virtual en el cual el PC es la plataforma sobre la cual se desarrollan, entre otras
cosas, las aplicaciones de captura, procesado, presentación y/o almacenamiento de
imágenes y de control de procesos basados en información gráfica o visual.
Son muchas las aplicaciones de la instrumentación virtual y de los sistemas de
procesado de imagen basados en el PC. Entre otras, se pueden nombrar campos
como control de calidad, pruebas y medidas automatizadas, control de procesos,
ingeniería de mantenimiento, etc. Además, permite que un sistema de visión se
pueda combinar con un sistema de control utilizando un solo PC (con el uso de una
tarjeta de adquisición de imagen, una tarjeta de adquisición de datos y control,
finalmente el software correspondiente a cada aplicación).
Los componentes necesarios para formar un sistema de visión basado en PC se
listan a continuación:
Un PC (Ordenador Personal)
La tarjeta de captura y procesado de imágenes (IMAQ)
El software de la aplicación (LabVIEW, IMAQ VISION, NI-IMAQ)
La cámara (CCD, etc.)
La iluminación apropiada.
Dentro del PC, la estructura del software y el hardware necesarios en aplicaciones
de visión artificial, como se muestra en la figura 1.4:

- 50 -
Figura 1.4 Estructura de un sistema de visión basado en PC
Gracias a esta estructura, se puede programar la tarjeta de adquisición de imágenes
a un nivel bastante simplificado. Es el paquete de interfase entre el hardware y la
aplicación (NI-IMAQ), el que se encarga de transformar las órdenes a nivel Labview
o C++ en señales apropiadas hacia el hardware para realizar las capturas
correctamente. A continuación, se presenta en la figura 1.5 una imagen que pone
de manifiesto la relación flexibilidad-costo en los sistemas de visión artificial:

- 51 -
Figura 1.5 Curva de solución de visión
1.5.6 Componentes de un sistema de visión basado en PC
Los elementos clave que componen un sistema de visión basado en PC son los
siguientes:
Figura 1.6 Elementos de un sistema de visión basado en PC
1.5.6.1 Iluminación
Se tiene que pensar en la iluminación como el análogo al acondicionamiento de
señal en una aplicación de adquisición de datos.
Seleccionando la técnica de iluminación adecuada, el desarrollo del software se
puede simplificar enormemente. En otras palabras, si la escena está correctamente
iluminada, la imagen adquirida tiene muchas más posibilidades de ser procesada
con éxito5.
1.5.6.2 Lentes y ópticas
5 http://zone.ni.com/devzone/cda/tut/p/id/2858

- 52 -
Dependiendo de las dimensiones del objeto a inspeccionar, las especificaciones de
la cámara y la lente son vitales. En una cámara será importante la medida del sensor
CCD, y en la lente la distancia focal y la mínima distancia de enfoque.
1.5.6.3 Cámara
Se pueden solucionar muchas aplicaciones de visión con cámaras analógicas
estándar (monocromo y de color), ya que son fáciles de configurar y mantener. En
cambio, si se quiere mejorar la resolución y velocidades de adquisición, se deben
utilizar cámaras digitales. También existen cámaras de infrarrojos para aplicaciones
térmicas.
1.5.6.4 Plug-in IMAQ hardware (Tarjeta)
Debido a la proliferación del hardware de adquisición de imágenes, éste resulta más
accesible económicamente. Además, ofrece más funcionalidad, facilidad de
configuración (plug&play), y versatilidad.
1.5.6.5 Software de la aplicación
El cual puede ser gráfico (p.e. LabVIEW) o un lenguaje en código escrito (p.e.
LabWindows/CVI). Este software, controla el dispositivo IMAQ, así como el
procesado y la visualización de la imagen capturada.
1.5.6.6 Estándar FireWire IEEE 13946
El FireWire fue inventado por Apple Computer a mediados de los 90, para luego
convertirse en el estándar multiplataforma IEEE 1394. A principios de este siglo fue
adoptado por los fabricantes de periféricos digitales hasta convertirse en un estándar
6 National Instruments, ―visionkit tutorial‖

- 53 -
establecido. Sony utiliza el estándar IEEE 1394 bajo la denominación i.Link, que
sigue los mismos estándares pero solo utiliza 4 conexiones, de las 6 disponibles en
la norma IEEE 1394, suprimiendo las dos conexiones encargadas de proporcionar
energía al dispositivo, que tendrá que proveerse de ella mediante una toma
separada.
1.1 a. Características del estándar FireWire IEEE-13941
Elevada velocidad de transferencia de información.
Flexibilidad de la conexión.
Capacidad de conectar un máximo de 63 dispositivos.
Su velocidad hace que sea la interfaz más utilizada para audio y vídeo digital. Así, se
usa mucho en cámaras de vídeo, discos duros, impresoras, reproductores de vídeo
digital, sistemas domésticos para el ocio, sintetizadores de música y escáneres.
Existen dos versiones:
FireWire 400: tiene un ancho de banda 30 veces mayor que el USB 1.1.
IEEE 1394b, FireWire 800 o FireWire 2: duplica la velocidad del FireWire 400.
Así, para usos que requieran la transferencia de grandes volúmenes de información,
resulta muy superior al USB.
Arquitectura altamente eficiente. IEEE 1394b reduce los retrasos en la
negociación, gracias a 8B10B (código que codifica 8 bits en 10 bits, que fue
desarrollado por IBM y permite suficientes transiciones de reloj, la codificación de
señales de control y detección de errores. El código 8B10B es similar a 4B5B de
FDDI, el que no fue adoptado debido al pobre equilibrio de corriente continua),
que reduce la distorsión de señal y aumenta la velocidad de transferencia.
Proporciona, por tanto, una mejor vivencia como usuario.
1 http://www.w3.org/1999/xhtml"><HEAD><TITLE>IEEE 1394 - Wikipedia, la enciclopedia
libre</TITLE

- 54 -
Distribución en el momento. Fundamental para aplicaciones de audio y vídeo,
donde un fotograma que se retrasa o pierde la sincronización arruina un trabajo,
el FireWire puede garantizar una distribución de los datos en perfecta sincronía.
Alimentación por el bus. Mientras el USB 2.0 permite la alimentación de
dispositivos sencillos y lentos que consumen un máximo de 2,5 W, como un
ratón, los dispositivos con FireWire pueden proporcionar o consumir hasta 45 W,
más que suficiente para discos duros de alto rendimiento y baterías de carga
rápida.
Conexiones de enchufar y listo. No se tiene más que enchufar un dispositivo para
que funcione.
..1 b. Ventajas de FireWire
Alcanzan una velocidad de 400 megabits por segundo.
Es hasta cuatro veces más rápido que una red Ethernet 100Base-T y 40 veces
más rápido que una red Ethernet 10Base-T.
Soporta la conexión de hasta 63 dispositivos con cables de una longitud máxima
de 425 cm.
No es necesario apagar un escáner o una unidad de CD antes de conectarlo o
desconectarlo, y tampoco requiere reiniciar el ordenador.
Los cables FireWire se conectan muy fácilmente: no requieren números de
identificación de dispositivos, conmutadores DIP, tornillos, cierres de seguridad ni
terminadores.
FireWire funciona tanto con Macintosh como con PC.
FireWire 400 envía los datos por cables de hasta 4,5 metros de longitud.
Mediante fibra óptica profesional, FireWire 800 puede distribuir información por
cables de hasta 100 metros, lo que significa que se podría disparar ese CD hasta
la otra punta de un campo de fútbol cada diez segundos. Ni siquiera se
necesitaría un ordenador o dispositivos nuevos para alcanzar estas distancias.
Siempre que los dispositivos se conecten a un concentrador FireWire 800, se
puede enlazarlos mediante un cable de fibra óptica súper eficiente.

- 55 -
CAPÍTULO II
DISEÑO E IMPLEMENTACIÓN
2.1 ESPECIFICACIONES DEL SISTEMA
En este capítulo, se describirá en detalle el sistema de visión artificial que se ha
implementado. El sistema de visión se puede desglosar en las siguientes partes:
Nivel del líquido de botellas a examinar.
Cámara de vídeo + óptica.
Tarjeta de adquisición de imagen (FIREWIRE IEEE 1394).
Sistema de iluminación.
Banda transportadora
Software de inspección (LabVIEW y IMAQ Visión).
Una vez enumerados los puntos de los que consta el proyecto, se emperezará por
describir el proceso en el cual se realizará la inspección del nivel de llenado de las
botellas.
2.2 DESCRIPCIÓN DEL PROCESO

- 56 -
Se trata de montar un sistema de visión artificial para el análisis del nivel de llenado
de botellas dentro de un rango establecido por el operador. Para este proceso se
utilizarán botellas de distinto tamaño y que posean líquido negro aunque se lo puede
realizar en cualquier color del líquido, claro está que éste no debe ser del mismo de
la botella, la discriminación dependerá de la resolución de la cámara.
El color del líquido utilizado para la inspección resulta fácil de contrastar con luz
blanca proveniente de flourecentes normales, además el método utilizado parar
encontrar el nivel del líquido en el programa realizado en labVIEW y IMAQ Visión,
es por ―cambio de contraste‖ y con el color negro se obtuvo resultados satisfactorios
para el método utilizado.
Las botellas viajan por una cinta transportadora que se encuentra en una de las
partes del proceso. El sistema tiene que ser capaz de detectar el paso de las
botellas, captar su imagen y procesarla para verificar el nivel de llenado del
producto. Dependiendo del resultado de la inspección, la botella avanzará o será
expulsada. En la Figura 2.1 se muestra una imagen general del sistema de visión:
Figura 2.1. Sistema de visión artificial
Para ello, se dispone de un armario de iluminación en el que se encuentra ubicada la
cámara. Este conjunto (armario de iluminación y cámara) se halla montado sobre la

- 57 -
cinta transportadora. Además, existe un sensor de proximidad (montado en el
armario de iluminación) que detecta el paso de la botella en movimiento. Cuando
ésta pasa a la altura del sensor, se envía una señal y se ejecuta la captura de la
imagen. En ese preciso momento, se realiza el procesado de la imagen (mediante
LabVIEW e Imaq Visión) y se decide si el nivel de líquido está en el rango
especificado y dar la acción de control.
Cabe destacar que en general, las aplicaciones de visión se realizan a medida del
objeto que se quiere inspeccionar. Por tanto, la flexibilidad de la aplicación es
bastante limitada. En este caso, se encontró delante de una excepción, por lo cual si
cambia el producto, el sistema no será capaz de adaptarse a los cambios
realizados. De todos modos, se ha intentado realizar un programa en el que sea lo
más fácil posible realizar cambios, de manera que se puedan inspeccionar botellas
con diferentes tamaños.
Esta condición se debe a que se ha planteado el problema de manera modular, y se
podrá medir el nivel en el rango escogido por el usuario.
2.3 OBJETO A EXAMINAR
En la figura 2.2.a y 2.2.b se muestran las botellas que se van a inspeccionar:
Figura 2.2.a. Nivel de líquido 1 Figura 2.2.b. Nivel 2
Es importante señalar que la parte analizada en las botellas es el nivel de líquido y
no la calidad del mismo o mal estado de las botellas etc. ya que este proyecto no

- 58 -
tiene fines industriales sino de tipo aplicativo específico. Por tanto, la precisión del
análisis de nivel depende directamente de la resolución de la cámara que para fines
del proyecto se la escogió por su bajo costo y por la facilidad de comunicación que
esta tiene con labVIEW, además lo que se trata únicamente es demostrar que el
sistema de visión artificial es capaz de comprobar el nivel del producto en análisis.
Para entrar en detalle, la parte analizada por visión se puede apreciar en la figura
2.3.
Figura 2.3. Nivel analizado
Una vez finalizadas las inspecciones, se generará en forma gráfica y numérica el
resultado obtenido de las botellas con el nivel correcto y las que han sido
rechazadas, así como el total de las botellas analizadas. De esta manera, se podrá
comprobar si se cumple con los requisitos exigidos.
2.4 CÁMARA DE VÍDEO + ÓPTICA

- 59 -
El conjunto cámara-óptica, el hardware PCI - IEEE 1394 y el NI-IMAQ driver
software forman el sistema de adquisición de imágenes de una aplicación de visión
artificial basada en PC como se muestra en la figura 2.4.
Figura 2.4. Sistema de adquisición de imágenes
En este apartado, se explicará qué tipo de cámara se ha escogido para la aplicación
en estudio. Esta decisión es trascendental a la hora de obtener una buena imagen,
por lo cual el éxito del proyecto depende en gran parte de esta elección.
2.4.1. Selección de la cámara
Cuando se habla de una cámara se hace referencia a un sofisticado transductor que
convierte una escena en una señal eléctrica de vídeo, que posteriormente con los
restantes elementos del sistema de adquisición y un PC se procesa y analiza. En el
mercado existen dos tipos básicos (de acuerdo con el tipo de señal que
proporcionan): las analógicas y las digitales2. En este trabajo se ha utilizado una de
tipo digital. Son cámaras que proporcionan una señal de vídeo digital que no
necesita ser digitalizada posteriormente mediante la tarjeta de adquisición de vídeo.
Típicamente, las cámaras utilizan un array CCD (Charge Coupled Device) que se ha
convertido en el estándar tecnológico en las cámaras. Este tipo de cámaras cumplen
con una serie de características ventajosas respecto a otro tipo de cámaras. En
primer lugar, es fácil configurarlas y son simples a la hora de manejarlas. Además,
aportan una alta resolución, son resistentes, pequeñas y de bajo costo. Su consumo
2 http://digital.ni.com/public.htm

- 60 -
de potencia es también bajo, por lo que son adecuadas para aplicaciones con
mucha carga de trabajo.
Figura 2.5. Matriz CCD de una cámara
Un CCD es una matriz rectangular (figura 2.5) de miles de semiconductores
interconectados. Cada píxel es un elemento fotosensible de estado sólido que
genera y almacena una carga eléctrica cuando es iluminado. El píxel o sensor es el
bloque básico constructivo de una imagen CCD. En la mayoría de configuraciones el
sensor incluye una circuitería que almacena y transfiere su carga hacia un registro
de desplazamiento. Éste convierte la matriz de cargas espaciales de la imagen CCD
en una imagen de vídeo variable en el tiempo. La información temporal de la
posición vertical y horizontal más el valor del sensor son combinados para formar la
señal de vídeo analógico3.
Aunque la relación señal-ruido es mayor que en una digital (donde la digitalización
se hace a nivel de la propia cámara antes de enviarla a la placa), las cámaras
analógicas son más baratas comparadas con las digitales, con estándares fáciles de
configurar y además pueden resolver numerosas aplicaciones a un precio atractivo.
Las cámaras pueden proporcionar señales de color o monocromo (blanco y negro), y
3 http://www-gva.dec.usc.es

- 61 -
su elección dependerá del tipo de imagen a procesar. En el caso de la Botella a
examinar, mediante un procesado adecuado de la imagen, es suficiente para
determinar la presencia del líquido.
Otro aspecto esencial en este proyecto, es determinar si la escena a inspeccionar
está en movimiento o no. En la primera etapa de pruebas, se realizó la captura de
la imagen con la botella a altas velocidades, obteniendo resultados indeseables,
como se muestra en la figura 2.5
Figura 2.5 Imagen capturada a alta velocidad
Para solucionar este inconveniente, es necesario utilizar una cámara de tipo
―progresiva‖, es decir, pensadas para captar imágenes de objetos en movimiento.
Sin embargo, existe la posibilidad de poder mejorar la calidad de la imagen si se
configura la cámara para que únicamente componga la imagen. De esta manera (en
teoría), se puede solucionar el problema del movimiento en parte ya que también se
lo puede hacer por software en el MAX de Nacional Instruments que da una serie de
configuraciones que son guardadas para más adelante utilizarlas en el programa.

- 62 -
Todo este problema se lo puede solucionar utilizando una cámara progresiva, ya que
ésta es utilizada para adquirir imágenes a altas velocidades, obteniendo así una
imagen nítida.
El costo de la cámara es muy elevado, por esta razón en el proyecto se decidió
disminuir la velocidad de la banda transportadora y utilizar una cámara de las
características que se detalla a continuación.
Finalmente, la cámara utilizada es una tipo digital Fire-iTM, con una resolución de
640 x 480 VGA. En la figura 2.6 se muestra este dispositivo:
Figura 2.6. Cámara Fire-i TM
2.4.2. Cámara digital Fire-iTM
Es una de las mejores cámaras FireWire digital de color disponible para
aplicaciones del hogar y la oficina.
La imagen es tipo VGA de calidad superior y se caracteriza por ser una cámara más
ligera que otras cámaras FireWire o cámaras USB.

- 63 -
Varias cámaras pueden conectarse y ser observadas desde una PC, utilizando el
software de Unibrain‘s Fire-iTM y los puertos FireWire IEEE1394.
El software Fire-iTM permite el uso de un monitor a múltiples cámaras locales o
remotas (Internet).
Con el toque de un simple botón el usuario puede almacenar instantáneamente
fotografía y video, se puede cambiar y ajustar las configuraciones de la cámara
desde software.
La cámara Fire-iTM es ideal para aplicaciones de monitoreo, video conferencia y para
vigilancia de hogar y oficina, los Drivers de la cámara Unibrain's Fire-i™ son
compatibles con LabVIEW de Nacional Instruments4.
a. Características principales
Monitoreo de Hogar/oficina, local o remoto.
Incluye servidor Web en Fire-i™.
Operación simultánea de múltiples cámaras y visualiza sobre una misma PC.
Comparte imágenes entre varias PC‘s.
Captura imágenes mientras monitorea.
Baja energía de consumo.
Brillo (f2.0), elementos de vidrio, longitud focal 4.3 mm, lente.
Dos puertos FireWire de 400 Mbps.
640 x 480 de resolución de video.
Velocidad de adquisición 30 cuadros por segundo.
Trípode adaptador con un ajuste atornillado para fotografías estándar.
(compatible con trípodes y montaje fijo para muros y techos).
Incluye mini-trípode con lente telescópico.
4 http://www.unibrain.com

- 64 -
b. Requerimientos para el funcionamiento
Computadora con Windows/Linux, con procesador de 1 GHz o superior, 512 de
RAM. Para el funcionamiento correcto de la cámara correr Windows
2000/XP/2003/Vista o Linux 2.4 Kermel o superior.
Requiere conexión de Internet para uso de la Web (120 Kbps o ancho de banda
superior para video).
c. Especificaciones de la cámara digital Fire-iTM
Interfase IEEE-1394a (FireWire) 400 Mbps, 2 puertos (6 pines)
Tipo de cámara IIDC-1394 Cámara Digital, especificación obedece V1.04
Tipo de sensor SonyTM Wfine* ¼ color CDD.
Resolución 640 x 480 VGA
Óptica Brillo del lente (F 2.0), con 4.3 de longitud focal.
Filtros del lente Antireflectivo y filtro cortador infrarrojo.
Modos de video RGB-24bit, Monocromo-8bit.
Velocidad de adquisición 30, 15, 7.5 y 3.75 cuadros por segundo
Ganancia Control manual o automático 0-30 dB.
Shutter Automático o control manual 1/3400s-1/31s.
Gamma ON/OF (uso visual/uso imagen procesada).
Balaceo del blanco Automático o control manual.
Saturación color Ajustable
Características especiales Modo de sleep por software, excepto de generador de
color.
Fuente de alimentación 8 a 30 VDC, consume 1 W máximo por bus 1394 o jack
interno, típico 0.9 W, 0.4 W en modo de sleep.
Dimensiones (WxHxD) 62 x 62 x 35 mm.
Material de fabricación & peso polímetro plástico gris y plateado, 60 gr.
Nota: Las cámaras para estándar de comunicación IEEE-1394 no existen en el país
(Ecuador) por lo que necesariamente se la importa de los EEUU, siendo Unibrain‘s
(California) quien la distribuye y en cuyo paquete se incluye:

- 65 -
Una cámara digital a color Fire-iTM capaz de desplegar 30 fps a 640 X 480
píxeles, (Figura 2.7)
Figura 2.7. Cámara
Un cable delgado Fire-i de 6 pines a ambos lados (Figura 2.8).
Figura 2.8. Cable
Un mini trípode con piernas telescópicas (Figura 2.9.)
Figura 2.9. Mini trípode
Un adaptador para el mini trípode o para cualquier soporte mecánico con estándar fotográfico (Figura 2.10.).

- 66 -
Figura 2.10. Adaptador
Un paquete de software con:
- Drivers y aplicaciones Unibrain‘s Fire-i (Figura 2.10.) para Windows
2000/XP/2003/Vista y XP 64 bit.
- Colección de LINUX drivers & software.
- Documentación y la garantía del acuerdo de Licencia de usuario de
Unibrain.
Figura 2.11. CD de Drivers
2.4.3. Óptica
Una vez se tiene la cámara, el reto inmediatamente posterior es establecer la óptica
más adecuada para la aplicación que se tiene. Normalmente, en los sistemas de
adquisición de imágenes, la cámara se selecciona basándose inicialmente en las
necesidades de la aplicación, ya que la medida de la matriz de los sensores CCD es
uno de los parámetros imprescindibles para encontrar la óptica más adecuada. Por
tanto, los parámetros a considerar para la elección de un buen sistema para
adquisición de imágenes son los siguientes:
Resolución, que vendrá dada por la medida de la característica más pequeña
del objeto que se quiera destacar en la imagen.

- 67 -
Medida del sensor, dimensiones del área activa del sensor CCD.
Campo de visión, área bajo inspección que la cámara puede adquirir.
Distancia de trabajo, es la distancia desde la óptica de la cámara hasta el objeto
a inspeccionar.
En la figura 2.12, se muestran los parámetros a considerar a la hora de diseñar un
sistema de adquisición de imagen:
Figura 2.12. Parámetros de un sistema de adquisición de imagen
El sistema de adquisición debe ser diseñado con el objetivo de captar imágenes de
suficiente calidad como para adquirir la información necesaria para extraer
conclusiones5. Dentro de las diversas especificaciones de los objetivos, es
interesante destacar tres:
Distancia focal: Es la distancia existente entre la matriz CCD y el punto de enfoque
del objetivo. Cuanto más pequeña sea la distancia focal, mayor será el campo de
visión. En la aplicación que se ha estudiado, para encuadrar un objeto pequeño
como lo es la botella, haría falta acercar mucho la cámara (en caso que la distancia
5http://haydn.upc.es/people/scuen/publications/Fundamentos%20de%20maquinas%20de%20vision%20en%20la%20industria.pdf

- 68 -
focal fuera pequeña). De tal manera, se tendría que acercar mucho el objeto a la
cámara y se producirían problemas de enfoque (ya que se estaría por debajo de la
mínima distancia de enfoque).
Si en cambio, se utiliza un objetivo con una distancia focal grande, el campo de
visión será más estrecho y se tendrá que alejar el objeto para encuadrarlo sin
problemas.
La montura del objetivo tiene que ser adecuada para el tipo de cámara que se utiliza.
Pero la montura debe corresponder a la óptica apropiada para que las imágenes
sean nítidas.
En la figura 2.13 se muestra de manera gráfica un esquema de la óptica y sus
parámetros:
Figura 2.13. Parámetros de la óptica

- 69 -
a. Nivel de Detalle
Es necesario calcular cuál será la resolución (también denominada nivel de detalle)
con la que el sistema será capaz de obtener las imágenes. Así, se podrá determinar
qué nivel del líquido posee la botella.
Como se ha dicho anteriormente, la botella a examinar es de distintas dimensiones
y por la irregularidad del diseño de la misma es difícil calcular su nivel de detalle y al
hacerlo se obtendría solamente valores aproximados.
Por ejemplo, para la resolución de la placa impresa que se muestra en la figura 2.14,
la placa a examinar tiene una dimensión de 70x47 mm. Una vez que la imagen se ha
encuadrado y se han eliminado los márgenes, se obtiene una imagen de 676x463
píxeles.
Figura 2.14. Medidas de la placa PCB
Si se divide 676/70 = 9,6 píxels/mm y 463/47 = 9,8 píxels/mm, se puede decir que
cada milímetro de placa equivale aproximadamente a 9 píxeles de la imagen. Con
esta resolución se puede inspeccionar perfectamente los caracteres serigrafiados
que se encuentran sobre los integrados.

- 70 -
2.5 ILUMINACIÓN Y ACONDICIONAMIENTO DE LA IMAGEN.
El tener una buena iluminación es una función vital para realizar un apropiado
acondicionado de la imagen. De esta manera se optimizará y mejorará el
rendimiento en su procesamiento.
Para proporcionar una iluminación correcta para aplicaciones generales de Visión
Artificial se deberá considerar los siguientes aspectos.
Objetivo: contrastar.
Región de interés (ROI).
Eliminar factores ambientales: luz del día, polvo, vibración, orientación del objeto,
etc.
Homogeneizar luz sobre FOV.
Eliminar reflejos.
2.5.1 Características de la Superficie
Difusa: superficie que refleja la luz en todos los ángulos, como se muestra en la
figura 2.15.
Figura 2.15 Superficie difusa
Especular: superficie que refleja la luz al ángulo de incidencia, como se muestra
en la figura 2.16.a y 2.16.b.
Figura 2.16.a Superficie especular

- 71 -
Figura 2.16.b Superficie que refleja luz al ángulo de incidencia
Absorsiva: superficie que no refleja luz, como se muestra en la figura 2.17.a y
2.17.b.
Figura 2.17.a Superficie absorsiva
Figura 2.17.b Superficie que no refleja luz
2.5.2 Técnicas de Iluminación
Difusa - iluminación desde múltiples direcciones
– elimina sombras, como se muestra en la figura 2.18.

- 72 -
Figura 2.18 Iluminación difusa
Directa - Iluminación de una sola fuente
– produce sombras, como se muestra en la figura 2.19.
Figura 2.19 Iluminación directa
2.5.3 Requisitos fundamentales para obtener un buen contraste en la zona de
interés
Iluminar la escena y el objeto de forma adecuada es un paso crítico y muy
importante para el éxito del desarrollo de una aplicación de inspección basada en

- 73 -
PC. Si embargo, muy a menudo se ignora su relevancia. El objetivo de la iluminación
es acondicionar el campo de imagen para separar el elemento que se quiere
inspeccionar de su entorno o background.
La elección de una buena técnica de iluminación debe permitir contrastar bien el
líquido de la botella para poder realizar un apropiado procesado. Con una buena
imagen, todos los pasos posteriores al procesado (filtrado, análisis morfológico,..)
son más fáciles. Por tanto, los aspectos básicos que se buscan con una buena
iluminación son:
Luz homogénea sobre el campo de visión.
Máximo contraste para las características de interés (en este caso el líquido a
analizar).
Mínimo contraste de las características que no interesan.
Mínima sensibilidad a variaciones ambientales.
Además, no se debe olvidar que para conseguir imágenes de calidad con el máximo
contraste, no sólo influye la iluminación. Intervienen otros factores tales como
características mecánicas, cámaras, óptica, así como la técnica empleada para
procesar la imagen.
2.5.4 Sistema de iluminación implementado
En este proyecto, lo que se ha hecho para aislar el sistema de las condiciones
ambientales, ha sido construir una cámara opaca con tubos de luz fluorescente, de
este modo, se consiguen niveles de luz constante que favorecen el proceso de
inspección. Los sistemas de Visión utilizan luz blanca que asemeja a la luz del día,
cuya característica de iluminación provee las flourecentes, esta iluminación permite
a la cámara adquirir imágenes con una característica fundamental como es el color
real del objeto escaneado, importante dentro de muchas de las aplicaciones de
Visión.

- 74 -
La cámara de iluminación se ha construido en fórmica y se la ha pintado
interiormente de color ―negro mate‖ que servirá para eliminar el brillo en la botella
producido por reflejos de materiales con colores más fuertes. En la figura 2.20 se
muestra los colores utilizados en el interior y exterior de la cámara de iluminación.
Figura 2.20. Exterior de la cámara de iluminación
En cuanto al interior del armario, se muestra en la figura 2.21. En ella se puede
apreciar la cámara y la cinta transportadora con la botella que lo atraviesan:
Figura 2.21. Interior del armario

- 75 -
Las medidas internas del armario de iluminación son:
Altura: 35 cm.
Anchura: 39 cm.
Profundidad: 16 cm.
Las medidas externas son:
Altura: 64 cm.
Anchura: 39 cm.
Profundidad: 51.5 cm.
Las medidas utilizadas dependen en gran parte de la distancia mínima de enfoque
que es de 18 cm, la cámara se encuentra ubicando a 3 cm de la puerta principal del
armario obteniendo un FOV (campo de visión) dentro de los limites de la región de
interés ROI, estos datos determinan el ancho del armario y cámara de iluminación.
La altura de la cámara de iluminación (35 cm) se obtuvo por la intensidad de la
iluminación necesaria dentro del armario (tamaño de las flourecentes) que están
instaladas verticalmente. La profundidad de la cámara de iluminación se determinó
con la necesidad de contrastar lo más nítidamente posible el líquido contenido en las
botellas, para ello, la pantalla de mica se la ubicó lo más cerca de la banda que
transporta los envases. Las medidas externas restantes se adquirieron al acoplar las
medidas determinadas en la cámara de iluminación.
En cuanto a las especificaciones propias de la iluminación se han utilizado 2 tubos
fluorescentes de 10 W con luz 54 (luz día con una temperatura de color 6200 ºK) que
ofrecen aproximadamente 90 lúmenes cada uno. Con esta cantidad de luz, se han
minimizado los efectos de las sombras y los reflejos de las botellas a examinar, de
manera que se facilita enormemente la tarea del análisis y reconocimiento del
líquido.
En la figura 2.22 se muestra el armario con los fluorescentes encendidos:

- 76 -
Figura 2.22. Interior de la cámara de iluminación
2.6. NI-IMAQ DRIVER SOFTWARE
Esta herramienta proporciona la unión entre el software y el hardware de aplicación,
es la interfase software la que controla los detalles de hardware, se comunica con
las diferentes tarjetas, y permite que la funcionalidad del hardware sea fácilmente
accesible al programador sin necesidad de escribir a nivel de registros u otros
programas complicados. En la figura 2.23 se muestra la interfase entre el software y
el hardware.
Figura 2.23. Interfase entre hardware y software

- 77 -
Esta herramienta está incluida en el dispositivo IMAQ de National Instruments. NI-
IMAQ es una extensa librería de funciones que se llaman desde el entorno de
programación (LabVIEW en este caso). Estas funciones incluyen rutinas para:
Adquirir imágenes continuamente en memoria, adquisición desde múltiples
entradas de vídeo, o adquisición de múltiples imágenes hacia múltiples buffers.
Manejar líneas digitales E/S para controlar relés de estado sólido (se pueden
controlar electroválvulas utilizando la tarjeta DAQ PXI-6527).
Iniciar (trigger) la adquisición de imagen por evento.
Escalar la imagen desde el hardware.
NI-IMAQ dispone de dos niveles de programación: funciones de programación de
alto y bajo nivel, lo cual proporciona flexibilidad, funcionalidad y un camino de
interfase fácil entre LabVIEW y los dispositivos hardware. Además, se tiene una
ayuda para reducir el tiempo de desarrollo de la aplicación, pudiéndose elegir entre
muchos tipos de métodos de adquisición. De esta manera, se pueden intercambiar
cámaras y tarjetas sin tener que cambiar significativamente ningún tipo de código.
IMAQ hardware y NI-IMAQ están diseñados para trabajar con IMAQ Visión (software
de procesado de imagen), ofreciendo capturas en tiempo real, así como la
extracción de información crítica en procesos de tiempo real.
2.7 DESCRIPCIÓN DEL SISTEMA DE SENSADO
En cuanto al sensor utilizado, se ha escogido un sensor infrarrojo, con el objetivo de
controlar el paso de la botella. De esta manera, se envía una señal de trigger cuando
la botella esté frente de la cámara para obtener una buena imagen de la misma, y de
esta manera la imagen tomada se pueda comparar con el patrón de comparación y
así comprobar la validez o no del nivel establecido.

- 78 -
En este apartado, se irá mostrando las características del sensor utilizado. En la
figura 2.24.a y 2.24.b se muestra el sensor utilizado en esta aplicación:
Figura 2.24.a Vista lateral Figura 2.24.b Vista Frontal
Las características técnicas del sensor utilizado se muestran en la tabla 2.1.
Tabla 2.1. Características
Características
Marca SASSIN
Tipo Fotoeléctrico Retro-Reflexivo.
Alcance Hasta 70 cm. máx.
Señalización Enciende un Led si el rayo es interrumpido.
Salida para relay.
2.7.1 Aplicaciones Típicas
a) Sensor para detectar objetos.
b) Sensor para control de seguridad.
c) Sensor para Robótica.
d) Otras posibles aplicaciones: Oficinas, tiendas, escuelas, almacenes,
detección de vehículos, etc.

- 79 -
2.7.2 Especificaciones
Las especificaciones del sensor fotoeléctrico utilizado se muestran en la tabla 2.2.
Tabla 2.2 Especificaciones
ESPECIFICACIÓN CARACTERÍSTICA
Número de Modelo G30 – 3A70NA
Tipo Fotoeléctrico Retro-Reflexivo Sistema de detección
Alcance de Sensor 70 cm
Fuente de Voltaje Sensor: 10 - 36 VDC
Consumo de Corriente 200mA Max.
Fuente de Luz: IR (infrarrojo) LED
Salida de Control: Relay (AC 120V/DC 24V, 2A)
Temperatura Ambiental: -4ºF (-4º-20ºC) ~ 122ºF (50ºC)
Tiempo de Respuesta ~0.5 sec. Para detección
2.8 ADQUISICIÓN DE LA SEÑAL SENSADA
Para este fin se utiliza la tarjeta de adquisición de datos NI USB-6009 que se
describe a continuación:
La NI USB-6008/6009 proporciona conexión a 8 canales de entradas análogas
(AI), dos canales de salida análogas (AO), 12 canales de entradas/salidas digitales
un contador de 32- bits cuando se utiliza una interfase a alta velocidad. La figura
2.25.a y 2.25.b muestra la disposición física de la tarjeta.

- 80 -
Figura 2.25.a USB-6008/6009
Figura 2.25.b USB-6008/6009 vista de atrás
2.8.1 Preparación del hardware
Para la utilización de la tarjeta USB se debe instalar los bloques terminales en el
combicom Jack, las partes que constituyen la tarjeta para su preparación se la
enumera a continuación y se las puede reconocer en la figura 2.26.
Etiqueta de la cubierta con las Guías de Orientación
Combicon Jack
Bloque de terminales.
Etiquetas de identificación para el bloque de terminales.
Figura 2.26. Preparación del hardware

- 81 -
2.8.2 Conector I/O
En la tabla 2.3 se puede apreciar la distribución de pines de la tarjeta USB.
Tabla 2.3. Distribución de pines
Señal en Modo Diferencial
Señal con Única Referencia Terminal Módulo

- 82 -
2.8.3 Descripción de señales
En la tabla 2.4 se indica la descripción de las señales que maneja la tarjeta.
Tabla 2.4. Descripción de señales
Nombre
señal
Referencia Dirección Descripción
GND _ _ Tierra.-Punto de referencia para referencia
única, para medición de AI. o para modo
diferencial
AI <0..7> Varias Entradas Canales de entrada análogas 0 a 7 para
medidas de referencia única, cada señal es un
canal de voltaje de entrada analógica. Para
modo diferencial AI 0 y AI 4 son la entrada del
positivo y negativo del modo diferencial del
canal 0. Las siguientes pares de señales
también forman canales de salida diferencial:
<AI 1, AI 5>, <AI 2, AI 6>, y <AI 3, AI 7>.
AO 0 GND Salida Canal 0 de salida análoga — Suministro de
salida del voltaje de A0 canal 0.
AO 1 GND Salida Canal 1 de salida análoga — Suministro de salida del voltaje de A0 canal 1.
P1.<0..3> P0.<0..7>
GND Entrada o
Salida
Señal Digital de I/O — Se puede configurar
individualmente cada señal como entrada o
salida.
+2.5 V GND Salida +2.5 V Referencia externa — Proporciona
una referencia para pruebas.
+5 V GND Salida +5V Fuente de poder— Proporciona +5 V y
200 mA de salida.
PFI 0 GND Entrada PFI 0— Este Pin es configurable como disparo
digital, como una salida de contador.

- 83 -
2.8.4 Circuito Digital I/O La figura 2.27 muestra las conexiones de P0. <0..7> conectada para configurar
como salida y entrada digital.
Figura 2.27. Conexión entrada/salida digital
P0.0 Configura como salida digital de drenaje abierto manejando un LED.
P0.2 Configurado como un ―push-pull‖ salida digital manejando un LED.
P0.4 Configurado como una entrada digital que recibe una señal TTL de una
compuerta inversora.
P0.7 Configurado como una entrada digital que recibe una señal de 0 V o 5 V
de un switch.

- 84 -
2.9 SISTEMA NEUMÁTICO
En la parte de control, para la expulsión de las botellas que no cumplan con las
características requeridas por el sistema, se emplea una serie de dispositivos
neumáticos que permitirá de manera eficaz a la ejecución de esta tarea.
2.9.1. Compresor
Es una máquina que eleva la presión de un gas, un vapor o una mezcla de gases y
vapores. La presión del fluido se eleva reduciendo el volumen específico del mismo
durante su paso a través del compresor. Comparados con turbo soplantes y
ventiladores centrífugos o de circulación axial, en cuanto a la presión de salida, los
compresores se clasifican generalmente como máquinas de alta presión, mientras
que los ventiladores y soplantes se consideran de baja presión.
Los compresores se emplean para aumentar la presión de una gran variedad de
gases y vapores para un gran número de aplicaciones. Un caso común es el
compresor de aire que suministra aire a elevada presión para transporte, pintura a
pistola, inflamiento de neumáticos, limpieza, herramientas neumáticas y
perforadoras. Otro es el compresor de refrigeración, empleado para comprimir el gas
del vaporizador. Otras aplicaciones abarcan procesos químicos, conducción de
gases, turbinas de gas y construcción.
a. Uso de los compresores
El aire comprimido se utiliza para la operación de máquinas y herramientas, taladrar,
pintar, soplar hollín, en transportadores neumáticos, en la preparación de alimentos,
en la operación de instrumentos y para operaciones en el sitio de uso (por ejemplo,
combustión subterránea) las presiones van desde 25 psi (172 kpa)hasta 60000 psi
(413,8 kpa). El empleo más frecuente es a presiones de 90 a 110 psi, que son los
límites de la presión normal en casi todas las fábricas.
Los compresores para gas se emplean para refrigeración, acondicionamiento de
aire, calefacción transporte por tuberías, acopio de gas natural, craqueo catalítico,
polimerización y en otros procesos químicos.

- 85 -
b. Mantenimiento
Una vez que se ha puesto a funcionar un compresor, hay que seguir un estricto
programa de mantenimiento preventivo. Los representantes técnicos, de los
fabricantes, especializados en reacondicionar compresores, muchas veces entrenan
al personal de la planta en los métodos de mantenimiento. Una importante ayuda
para el mantenimiento, a lo cual no siempre se presta mucha atención, son los
manuales de operación y mantenimiento que publica el fabricante.
Durante el funcionamiento normal, hay que vigilar lo siguiente: flujo de agua de
enfriamiento, nivel, presión y temperatura del aceite, funcionamiento de los controles
y presión del control, presiones y temperaturas de succión y descarga, ruidos
anormales y carga y temperatura del motor.
Es indispensable un registro diario del funcionamiento del compresor, en especial de
los de etapas múltiples, para un mantenimiento eficiente. Se debe registrar cuando
menos lo siguiente: 1) temperatura y presiones de succión, descarga y entre etapas
2) temperaturas del agua de las camisas de entrada, salida y entre etapas 3)
temperatura y presión de aceite para lubricar los cojinetes 4) carga, amperaje y
voltaje del motor 5) temperatura ambiente 6) hora y fecha.
Con ese registro, el supervisor puede observar cambios en la presión o temperatura
que indican un mal funcionamiento del sistema. La corrección rápida evitará serios
problemas más tarde.
2.10 RELÉ
Es un dispositivo que consta de dos circuitos diferentes: un circuito electromagnético
(electroimán) y un circuito de contactos6. En la figura 2.28 se puede ver su
simbología así como su constitución (relé de armadura).
6 http://www.uv.es/~marinjl/electro/reles.html

- 86 -
Símbolo del relé de un
circuito
Símbolo del relé de dos
circuitos Partes de un relé de armaduras
Figura 2.28. Simbología y constitución
Su funcionamiento se basa en el fenómeno electromagnético. Cuando la corriente
atraviesa la bobina, produce un campo magnético que magnetiza un núcleo de
hierro dulce (ferrita). Éste atrae al inducido que fuerza a los contactos a tocarse;
cuando la corriente se desconecta vuelven a separarse.
2.10.1 Características técnicas
a. Parte electromagnética
Corriente de excitación.- Intensidad, que circula por la bobina, necesaria para activar
el relé.
Tensión nominal.- Tensión de trabajo para la cual el relé se activa.
Tensión de trabajo.- Margen entre la tensión mínima y máxima, garantizando el
funcionamiento correcto del dispositivo.
Consumo nominal de la bobina.- Potencia que consume la bobina cuando el relé
está excitado con la tensión nominal a 20ºC.

- 87 -
b. Contactos o Parte mecánica
Tensión de conexión.- Tensión entre contactos antes de cerrar o después de abrir.
Intensidad de conexión.- Intensidad máxima que un relé puede conectar o
desconectar.
Intensidad máxima de trabajo.- Intensidad máxima que puede circular por los
contactos cuando se han cerrado.
Los materiales con los que se fabrican los contactos son: plata y aleaciones de plata
que pueden ser con cobre, níquel u óxido de cadmio. El uso del material que se elija
en su fabricación dependerá de su aplicación y vida útil necesaria de los mismos.
2.10.2 Relés más utilizados.
a. De armadura
El electroimán hace vascular la armadura al ser excitada, cerrando los contactos
dependiendo de si es normalmente abierto o normalmente cerrado.
b. De núcleo móvil
Tienen un émbolo en lugar de la armadura. Se utiliza un solenoide para cerrar los
contactos. Se suele aplicar cuando hay que manejar grandes intensidades.
En la figura 2.29 se puede observar algunos tipos de relés que existen en el
mercado.

- 88 -
Relé de armaduras Relé de armaduras Relé Reed
Relé en encapsulado tipo
DIP
Relé en encapsulado tipo
DIP
Aplicación de los reles
como módulos de
interface
Figura 2.29 Tipos de relés
Las aplicaciones de este tipo de componentes son múltiples: en electricidad, en
automatización, control de motores industriales, etc.
En electrónica sirven básicamente para manejar tensiones y corrientes superiores a
los del circuito propiamente dicho, se utilizan como interfases para PC, en
interruptores crepusculares, en alarmas, en amplificadores, cilindro de simple efecto,
etc.
2.11 ELECTROVÁLVULAS
Estas válvulas se utilizan cuando la señal proviene de un temporizador eléctrico, un
final de carrera eléctrico, presostatos o mandos electrónicos. En general, se elige el
accionamiento eléctrico para mandos con distancias extremamente largas y cortos
tiempos de conexión7.
7 http://www.insetec.com.ec

- 89 -
Las electroválvulas o válvulas electromagnéticas se dividen en válvulas de mando
directo o indirecto. Las de mando directo solamente se utilizan para un diámetro luz
pequeña, puesto que para diámetros mayores los electroimanes necesarios
resultarían demasiado grandes.
El principio de funcionamiento consiste en obtener la fuerza para desplazar la
corredera a partir de un electroimán. La colocación de estas válvulas en las
instalaciones neumáticas, implica la instalación de un circuito eléctrico que las
active.
2.11.1 Válvulas reguladoras de flujo o caudal
Son válvulas que ajustan el caudal circulante a un valor fijo o variable. Existen dos
tipos de válvulas de flujo:
a. Válvula estranguladora.- Actúan sobre el caudal en cualquiera de los dos
sentidos de flujo.
b. Válvula estranguladora unidireccional.- Actúa sobre el caudal en un solo
sentido de flujo.
c. Válvulas reguladoras de presión.- Son válvulas que regulan la presión del aire
en circulación, controlándolo desde un valor nulo hasta el máximo valores de
alimentación.
2.11.2 Elementos de trabajo, actuadores neumáticos
Un actuador neumático es un componente capaz de transformar la energía potencial
del aire comprimido en trabajo mecánico. Existen diferentes tipos de actuadores,
pudiendo clasificarlos en:
a. Cilindros.- Entregan el trabajo en forma rectilínea de empuje-tracción.
b. Actuadores de giro.- Proporcionan movimientos angulares.

- 90 -
2.11.3 Motores neumáticos
Tienen un eje que puede girar para accionar mecanismos rotativos.
Los parámetros básicos de los actuadores neumáticos son:
Cilindros............................................. Fuerza y carrera.
Actuadores de giro............................... Par y ángulo.
Motores neumáticos............................ Par y revoluciones.
2.11.4 Cilindros de simple efecto
Estos cilindros tienen solo una conexión de aire comprimido. No pueden realizar
trabajos, más que en un sentido. Por ello, sólo necesitan aire para el movimiento de
traslación, ya que el retroceso se produce por el esfuerzo que ejerce un muelle que
se incorpora cuando se deja de aplicar presión. Estos cilindros se utilizan para
realizar operaciones de sujeción, expulsión, etc.
2.11.5 Cilindros de doble efecto.- Estos cilindros disponen de dos tomas de
presión, una a cada lado del embolo. Pueden realizar trabajos en los dos sentidos,
avance y retroceso. La carrera de los cilindros de doble efecto es mayor que la
carrera que puede realizar un cilindro de simple efecto.
2.12 LabVIEW
LabVIEW (Laboratory Virtual Instrument Engineering Workbench) es un lenguaje de
programación gráfico para el diseño de sistemas de adquisición de datos,
instrumentación y control. LabVIEW permite diseñar interfases de usuario mediante
una consola interactivo basado en software.
Este software es a la vez compatible con herramientas de desarrollo similares y
puede trabajar con programas de otra área de aplicación, como por ejemplo Matlab,
entre otros; tiene la ventaja de que permite una fácil integración con hardware,
específicamente con tarjetas de medición, adquisición y procesamiento de datos
(incluyendo adquisición de imágenes).

- 91 -
2.12.1 Aplicaciones de LabVIEW
Tiene su mayor aplicación en sistemas de medición, como monitoreo de procesos y
aplicaciones de control, un ejemplo de esto pueden ser sistemas de monitoreo en
transportación, laboratorios para clases en universidades, procesos de control
industrial. LabVIEW es muy utilizado en procesamiento digital de señales,
procesamiento en tiempo real de aplicaciones biomédicas, manipulación de
imágenes y audio, automatización, diseño de filtros digitales, generación de señales,
entre otras, etc.
2.12.2 Programación gráfica con LabVIEW
Cuando se diseña programas con Labview se trabaja siempre bajo algo denominado
VI, es decir, un instrumento virtual. Se pueden crear VI a partir de especificaciones
funcionales que se diseñe. Éste VI puede utilizarse en cualquier otra aplicación
como una subfunción dentro de un programa general. Los VI's se caracterizan por:
ser un cuadrado con su respectivo símbolo relacionado con su funcionalidad, tener
una interfaz con el usuario, tener entradas con su color de identificación de dato,
tener una o varias salidas y por su puesto ser reutilizables.
2.12.3 Entorno LabVIEW
La programación G (gráfica) de Labview consta de un panel frontal y un panel de
código. En el panel frontal es donde se diseña la interfase de usuario y se ubican los
controles e indicadores8.
En el panel de código se encuentran las funciones, cada control que se utiliza en la
interfaz tiene una representación en el panel de código, igualmente los indicadores
necesarios para entregar la información procesada al usuario tienen un icono que los
identifica en el panel de código o de programación. Los controles pueden ser
booleanos, numéricos, strings, un arreglo matricial de éstos o una combinación de
8 National Instruments, ―IMAQ Vision for G Reference Manual‖ – 1999.

- 92 -
los anteriores; y los indicadores pueden ser como para el caso de controles pero
pudiéndolos visualizar como tablas, gráficos en 2D o 3D, browser, entre otros.
Las funciones pueden ser VI's prediseñados y que pueden ser reutilizados en
cualquier aplicación, estos bloques funcionales constan de entradas y salidas, igual
que en un lenguaje de programación estándar, las funciones procesan las entradas y
entregan una o varias salidas, estos VI pueden también estar conformados de otros
subVI's y así sucesivamente, de esta forma se pueden representar como un árbol
genealógico donde un VI se relaciona o depende de varios SubVI's.
LabVIEW tiene VI's de adquisición de datos e imágenes, de comunicaciones, de
procesamiento digital de señales, de funciones matemáticas simples, hasta
funciones que utilizan otros programas para resolver problemas, otras mas
complejas como "nodos de formula" que se utilizan para la resolución de ecuaciones
editando directamente éstas como en lenguajes de programación tradicionales y
definiendo las entradas y las salidas. LabVIEW también se puede utilizar para
graficar en tres dimensiones, en coordenadas polares y cartesianas, tiene
disponibles herramientas para análisis de circuitos RF como la Carta de Smith, tiene
aplicaciones en manejo de audio y se puede comunicar con la tarjeta de sonido del
computador para trabajar conjuntamente.
Entre sus muchas funciones especiales se encuentran las de procesamiento de
imágenes, como capturar una imagen a través de una tarjeta de adquisición como la
PCI-1408 o la IEEE 1394, analizarla y entregar respuestas que difícilmente otros
sistemas realizarían.
2.12 NI VISIÓN
Es una librería de labVIEW, que puede ser usada para desarrollar aplicaciones
científicas. El módulo de desarrollo de NI Visión incluye las mismas funciones para
LabWindows/CVI y otros desarrolladores en ambiente de lenguaje C, así como
controles ActiveX para Visual Basic. El asistente de Visión es otro módulo de
desarrollo de aplicación, que permite realizar prototipos en forma rápida sin tener
que hacer algún tipo de programación adicional.

- 93 -
2.13 VISUALIZACIÓN DE LA IMAGEN EN LABVIEW
Comprobada la cámara y reconocida en el MAX ya se la puede utilizar para observar
imágenes en LabVIEW con las herramientas que ofrece IMAQ Visión.
2.13.1 Panel frontal
En la figura 2.30 se muestra la imagen captada en labVIEW.
Figura 2.30 Adquisición de imagen en LabVIEW
2.13.2 Diagrama de bloques” Código fuente‖
El diagrama básico para adquirir imágenes desde labVIEW se muestra en la figura
(2.31)
Figura 2.31 Diagrama de bloques

- 94 -
A continuación se detalla las herramientas de Visión utilizadas en este VI.
IMAQ Create Crea una imagen
Border
Size (tamaño del
borde)
Determina el ancho en píxeles del borde alrededor de la imagen.
Image
Name (Nombre de
la imagen)
Es el nombre asociado con la imagen creada. Cada imagen creada tiene un único nombre.
Error in
(no error)
Describe condiciones de error que ocurre después de correr un VI o función, por defecto
está en no error, si ocurre un error después de correr un VI o función, el VI o función pasa
de error in a error out.
Image
type (tipo de
imagen)
Especifica el tipo de imagen. Estos valoren están validos:
New
Image (nueva
imagen)
Es la imagen de referencia que se está proporcionando como entrada a toda función
subsecuente usado por NI Visión.
Error out
Contiene información de error.

- 95 -
IMAQdx Open Camera. Vi
Abre, pregunta, y carga un archivo de configuración de cámara, creando una única referencia para la misma. Usa
IMAQdx close Camera.vi cuando ha finalizado con la referencia.
Camera
Control Mode
(Modo de control
de la cámara)
Usado durante el broadcasting de la imagen, abre una cámara en modo controlado a
activar, configurar y adquirir un dato de imagen.
Session In Especifica el nombre de la cámara que desea abrir. El valor por defecto es cam0.
Error in Describe condiciones de error que ocurre después que el VI o función corre.
Session
Out
Es la única referencia a la cámara. Session Out es en algunas veces como Session In.
Error out
Contiene información de error.
IMAQdx Configure Grab. Vi
Configura e inicializa la adquisición. La adquisición se la hace continuamente en un lazo en tres buffers. Se usa la función Grab. para adquisición de imágenes de alta velocidad.
Session In Es la referencia única para la cámara, que se puede obtener con IMAQdx Camera.Vi
Error in Describe condiciones de error que ocurre después que el VI o función corre.
Session Out Es la única referencia a la cámara. Session Out es en algunas veces como Session
In.
Error out Contiene información de error.

- 96 -
IMAQdx Grab. Vi
Adquiere los cuadros más recientes y la envía hacia Image Out. Se Llama este VI solamente después de haber
llamado a IMAQdx Configure Grab. Vi. Si el tipo de imagen no corresponde con el formato de la cámara de video, este VI cambia al tipo de imagen para el formato complementario.
Session In Es la referencia única para la cámara, que se puede obtener con IMAQdx open
Camera.Vi.
Es la referencia a la imagen que es recibida una vez capturado el dato o píxel.
Error in Describe condiciones de error que ocurre después que el VI o función corre.
Session Out Es la única referencia a la cámara. Session Out es en algunas veces como
Session In.
Salida de la imagen capturada.
Error out Contiene información de error.
IMAQdx Close Camera.Vi
Detiene la adquisición en progreso. Relaciona los recursos asociados con la adquisición y cierra la adquisición especificada.
Session In Es la referencia única para la cámara, que se puede obtener con IMAQdx open
Camera.Vi.
Error in Describe condiciones de error que ocurre después que el VI o función corre.
Error out Contiene información de error.
2.14 Programación en LabView
Una vez en funcionamiento la cámara empieza a adquirir la señal digital de vídeo. La
señal del sensor indicará el inicio de la adquisición de la imagen para el análisis.

- 97 -
Una vez sensada la botella y obtenido un contacto a relé, se simplifica
significativamente la programación en LabVIEW ya que no es necesario configurar
los parámetros de adquisición por disparo ―triggering” por lo que no sería necesario
la utilización de una tarjeta de adquisición de imágenes, en este caso la condición
verdadera dará el inicio al procesado de la imagen.
2.14.1 Procesamiento de la Imagen En esta parte del programa si la condición es verdadera, es decir si el sensor a
detectado la presencia del objeto, envía un 1 lógico por la tarjeta y se ejecuta el lazo
que se muestra en la figura 2.32.
Figura 2.32 Procesado de la imagen
Dentro de este lazo se encuentran cuatro SubVi‘s de Visión, que posteriormente se
los explicará en forma más detallada.
Detectada la botella, la imagen de la misma es ingresada al subVI bordes con la
cual se genera la región de análisis para luego ingresarla al subVI Find Level
(encontrar nivel) que define el nivel dentro de la región de análisis.
Posteriormente esta señal es ingresada al subVI media, para obtener un valor
numérico con el que se realizará una comparación con el valor del nivel superior e

- 98 -
inferior, que definirá si el rango está dentro del nivel correcto y en caso de no estar
enviar una señal de salida por la tarjeta para la acción de control pertinente.
El SubVI History, únicamente permite visualizar en la pantalla un historial del
número de botellas detectadas, así como el número de botellas correctas y
defectuosas.
En este lazo se encuentra una herramienta de Visión que es el IMAQ Overlay
Rectangle cuyo ícono es el siguiente:
IMAQ Overlay Rectangle
Genera un rectángulo de una imagen automáticamente, una vez ingresados los límites.
Es la referencia para la imagen
Especifica las coordenadas del rectángulo en una imagen
Es el valor para la parte izquierda del rectángulo
Es el valor para la parte superior del rectángulo
Es el valor para la parte derecha del rectángulo
Es el valor para la parte inferior del rectángulo
Especifica si se desea dibujar solo el borde o el llenado total del rectángulo
Error in
(no error)
Describe condiciones de error que ocurre después de correr un VI o
función, por defecto está en no error. Si ocurre un error después de correr
un VI o función, el VI o función pasa de error in a error out.
Especifica el color de línea que se desea ver en el trazado
Salida de la imagen capturada.
Error out Contiene información de error.

- 99 -
a. SubVI Encontrar Bordes
Este subVI permite encontrar toda la región de interés de la imagen captada, es
decir, hace un barrido horizontal y si existe un cambio de contraste lo toma como
borde, luego esta imagen es ingresada a un lazo para que estos puntos sean
convertidos en datos numéricos (borde 1 y borde 2), como se muestra en la figura
2.33.
Figura 2.33 SubVi encontrar bordes
En este subVI se encuentra dos herramientas de visión:
IMAQ Clear Overlay
Borra la imagen anterior.
Es la referencia para la imagen
Error in
(no error)
Describe condiciones de error que ocurre después de correr un VI o función,
por defecto está en no error. Si ocurre un error después de correr un VI o
función, el VI o función pasa de error in a error out.
Salida de la imagen capturada.
Error out Contiene información de error.

- 100 -
IMAQ RAKE
Traza los bordes a lo largo de un conjunto de líneas paralelas que se encuentran dentro de un rectángulo
Función del IMAQ RAKE.
Es la referencia para la imagen.
Es un cluster que define las características del filtro usado para detectar
los bordes. Contiene el contraste, el ancho del filtro y la pendiente.
Es un descriptor del rectángulo o la rotación del rectángulo dentro del
borde definido.
Es la distancia en píxel, entre cada línea paralela en la región
rectangular.
Busca la dirección de las líneas paralelas.
Determina el tipo de búsqueda.
Es un array cluster de puntos, es un conjunto de coordenadas
espaciales de todos los bordes detectados.
Error in
(no error)
Describe condiciones de error que ocurre después de correr un VI o
función, por defecto está en no error. Si ocurre un error después de
correr un VI o función, el VI o función pasa de error in a error out.
Error out Contiene información de error.

- 101 -
En la figura 2.34 se puede observar lo que en la práctica hace el subVI bordes.
Figura 2.34 Encontrado de bordes en la botella
b. SUBVI Encontrar Nivel (Find Level)
Este subVI es semejante al subVI encontrar Bordes con la diferencia que este hace
un barrido en forma vertical. Ésto se consigue cambiando la configuración del scan
direction en el IMAQ Rake, Obtenido los datos de bordes del subVI anterior más un
punto de referencia y un valor de constante, se logra generar la región de interés
(ROI), que se la consigue con el icono ROI explicado posteriormente.
Una vez obtenido todos los datos se ingresa a un lazo For para poder graficar los
puntos cuando existe un cambio de contraste en el producto y posteriormente
dibujarlo en la imagen como se muestra en la figura 2.35.

- 102 -
Figura 2.35 SubVi encontrar nivel
En este SubVI se encuentra tres herramientas de IMAQ de las cuales dos ya se han
explicado anteriormente como son el IMAQ Rake y el IMAQ Clear Overlay.
IMAQ Convert Rectangle to ROI
Convierte un rectángulo o Rectángulo Rotado a un ROI Descriptor.
Especifica una región rectangular
Es la coordenada en X de la esquina superior izquierda del rectángulo Es la coordenada en Y de la esquina superior izquierda del rectángulo Es la coordenada en X de la esquina inferior derecha del rectángulo Es la coordenada en Y de la esquina inferior derecha del rectángulo
Error in
(no error)
Describe condiciones de error que ocurre después de correr un VI o función,
por defecto está en no error. Si ocurre un error después de correr un VI o
función, el VI o función pasa de error in a error out.
Es el descriptor que define el rectángulo.
Error out Contiene información de error.

- 103 -
En la Figura 2.36 se puede visualizar de mejor manera lo explicado.
Figura 2.36 Nivel detectado
c. SubVI Media
En este subVI, debido a que la cámara capta una serie de puntos en toda la imagen,
lo que se necesita es que solamente se encuentre el borde donde se encuentra el
líquido del envase, por tal razón se encuentra un punto medio el cual se genera con
el algoritmo Measures of Mean como se puede apreciar en la figura 2.37.
Figura 2.37 SubVi media

- 104 -
El SubVI propio del sistema utilizado para encontrar el punto se medio se detalla a
continuación.
Measures of Mean (Not in Base Package)
Encuentra el punto medio de una serie de puntos.
Especifica el conjunto de datos
Especifica el tipo de cálculo a realizar
Retorna el dato que ha sido calculado
Contiene información de error.
d. SUBVI Historial (History)
Este SubVI sirve para visualizar en forma numérica y en diagrama de barras el
número de botellas que circulan por la banda transportadora, permitiendo que se
conozca el número de buenas y malas que han sido detectadas por el programa. En
la Figura 2.38 se observa el código fuente del subVI
Figura 2.38. SubVI History

- 105 -
2.13.2 Entrada/Salida digital de datos
Una vez terminado los SubVI‘s que ayudan a determinar el nivel del líquido, se
necesita configurar los puertos para la entrada de la señal del sensor que permitirá
el disparo de la cámara y a su vez la señal de salida que se utilizará para activar el
circuito neumático.
El código fuente utilizado para este fin se muestra en la figura 2.39.
Figura 2.39. Entrada y salida de datos digital
La función que realizan los iconos utilizados para esta aplicación se detalla a
continuación.
Crea un canal para generar una señal digital
Permite que la aplicación empiece a correr
Escribe en el puerto un dato booleano
Lee en el puerto un dato booleano
Detiene la aplicación.

- 106 -
En la figura 2.40 se muestra el código fuente completo de toda la programación
realizada para el control de nivel de llenado de botellas.
Cabe señalar que cada uno los SubVi‘s que se aprecian en la figura 2.40, ya se los
ha detallado anteriormente con cada una de sus funciones y el papel que
desempeñan en la aplicación.
Los SubVi‘s de Visión propios del sistema utilizados en esta aplicación se ha
indicado su funcionamiento, existiendo otros iconos que no han sido explicados por
ser parte de la plataforma del software, existiendo en casi todas las versiones de
labVIEW.

107
Figura 2.40. Programa General

108
CAPÍTULO III
RESULTADOS Y PRUEBAS EXPERIMENTALES
3.1 GENERALIDADES
Este capítulo detalla las pruebas realizadas para la fabricación del conjunto de
inspección, ésto es la construcción del armario, banda transportadora, ubicación de
la cámara, sensor y circuito neumático, cuyas características se estudiaron en los
capítulos anteriores y cuyo dimensionamiento se detalló en el respectivo diseño.
El objetivo último de esta fase es conocer en forma práctica todos los
procedimientos realizados, así como los elementos utilizados en las pruebas que
forman parte del proyecto. Además, este capítulo hace importante mención a todo el
proceso de montaje y adaptación del proyecto para la obtención de resultados
satisfactorios.
3.2 CONSTRUCCIÓN DEL CONJUNTO DE INSPECCIÓN
3.2.1 Construcción del armario
La construcción del armario que se muestra en la figura 3.1 se hace necesaria ante
la necesidad de montar el sistema de iluminación que contrastará y permitirá mejorar

109
la imagen en análisis, además las botellas a ser analizadas serán montadas sobre
una banda transportadora movida por un motor eléctrico.
Este armario está construido de fórmica muy resistente a la erosión. Las medidas
que tiene el mismo fueron tomadas realizando pruebas de iluminación y distancia
necesaria para la operación de la cámara, tomando también muy en cuenta la
distancia de detección del sensor.
Figura 3.1 Armario de iluminación
3.2.1.1 Construcción de la cámara de iluminación
Está cámara fue construida con fórmica que es un material de mucha resistencia. En
su interior se colocó dos fluorescentes, para facilidad de manipulación de los
mismos, existe una puerta en la parte anterior como se muestra en la figura 3.2, en
la que van distribuidas cada una a 12 cm de los bordes laterales respectivamente.
Cabe señalar que la distribución equilibrada de los flourecentes ayudó a mejorar la
uniformidad de la iluminación en el interior del armario.

110
Figura 3.2 Cámara de iluminación
Como se observa en la figura 3.2, la luz utilizada es blanca de flourecentes
normales de uso doméstico, ya que en casos especiales se requerirá iluminación
especial para contrastar los objetos, todo ésto dependerá en gran parte de la
resolución de la cámara utilizada.
3.2.1.2 Adecuación del armario para la señal del sensor.
Una de las características importantes del sensor, es su alcance de detección
(70cm) al ser ésta mayor a la profundidad del armario, provoca una detección
continua al chocar con la parte anterior del mismo y cuya señal al ser ingresada al
computador provoca serios problemas al momento de ejecutar el programa, por tal
razón existe un corte en la parte posterior del armario como se muestra en la figura
3.3.

111
Figura 3.3 Parte hueca del Armario
La ubicación del sensor en el interior del armario es de 10 cm. de separación con
relación a la banda de transporte y a 18 cm. de los laterales del armario. Se
construyó un soporte de hierro de 11 cm de longitud que sujeta firmemente al
sensor, este soporte está fijado en el piso del armario como se muestra en la figura
3.4.
Figura 3.4 Sensor y soporte

112
3.3 PRUEBAS EXPERIMENTALES
3.3.1 Descripción Física Del Sistema.
Para reemplazar el método tradicional de control del nivel de líquido que emplean
empresas (visual) que fabrican productos de consumo masivo como por ejemplo
aceite comestible, bebidas gaseosas, etc. Los autores de este proyecto han
considerado la necesidad de realizar un diseño y construcción de un sistema de
visión artificial que solucione el problema.
Este sistema consiste en un armario con una cámara de iluminación que ayudará a
contrastar el líquido que será analizado al momento que el sensor detecte la botella
que viaja en una banda transportadora.
Este armario es de forma rectangular con dos puertas una anterior y otra posterior,
en los laterales existen orificios adecuados para la circulación de la botella por la
banda, en el interior del armario, al abrir la puerta anterior, se encuentra el sensor
que está ubicado en el centro de la parte inferior sujetado con una platina de hierro
galvanizado. Aquí también se encuentra la cámara Fire-i sujeta de la parte superior
por una platina de hierro en la que existe un canal hueco que ayudará a la
regulación de la cámara para distintos tamaños de botellas. La puerta posterior
alberga la cámara de iluminación que consta de dos flourecentes distribuidas
uniformemente en la puerta (parte interior), todo este armario está sobre la mesa
que contiene la cinta de transporte con sus respectivos rodamientos y el motor que
da movimiento a los mismos. En esta mesa también se encuentran dos swichs para
el encendido/apagado del motor y luminarias.
Todo este conjunto Banda-armario está acompañado de un sistema de control
neumático que se encuentra también instalado en la parte interna del armario, este
sistema está constituido por una electro válvula 5/2 vías, pistón de doble efecto,
válvula estranguladora, compresor y mangueras, además se instaló una rampa que
conduce las botellas con nivel incorrecto, hacia un depósito.

113
3.3.2 Prueba de Unidades
Se comprobó la comunicación entre la cámara Fire-i y la tarjeta IEEE 1394,
inicialmente adquiriendo la imagen a 100 Mbps y encontrando la adquisición óptima
a 400 Mbps.
3.3.3 Pruebas del sensor
En el panel frontal, para determinar el tiempo de respuesta del sensor, se colocó un
indicador booleano visualizando un tiempo de encendido inmediato al momento que
el sensor enviaba la señal detectada, comprobando así la eficiencia del dispositivo
utilizado en el sistema implementado.
3.3.4 Pruebas de la cámara de iluminación
El tipo de iluminación de Background uniforme en el interior del armario, corrige el
contraste y el brillo que generan en la botella otras fuentes de iluminación tales como
la luz solar, focos incandescentes entre otras.
3.3.5 Pruebas de movimiento de banda transportadora
La banda transportadora provee un movimiento uniforme, lo que permite la
estabilidad de la botella, mostrando el nivel del líquido en forma estática,
favoreciendo el análisis correspondiente.
3.3.6 Pruebas del circuito neumático
Mediante el empleo de una válvula estranguladora, se realizó todos los ajustes hasta
obtener un flujo de aire adecuado para controlar la velocidad del pistón que se
requiere en el proyecto.

114
3.4 ANÁLISIS TÉCNICO-ECONÓMICO.
Desde el punto de vista técnico, el proyecto de Visión implementado ha cumplido
con las pruebas realizadas. El tiempo continuo que ha permanecido en operación en
las pruebas es considerable. Sin embargo, es pertinente cuantificar la inversión
realizada en los componentes implementados.
Cabe indicar, que todos los componentes eléctricos y mecánicos son nuevos, fueron
adquiridos en diferentes casas comerciales e incluso traído del exterior. En la tabla
3.1 se detalla por ítems el costo de los componentes adquiridos durante el año
2007. El costo neto de los componentes es de 1860 dólares americanos. Para
conocer el costo total del proyecto, debe añadirse el rubro de la mano de obra de
ingeniería y montaje del proyecto. Aún, cuando no existe una regla definida para la
estimación del costo del software y de la ingeniería, se aplica la regla de Cocomo.
Dicha regla establece la siguiente expresión:
Costo (USD)=K*No horas persona
Siendo:
K = Valor hora profesional en USD, estimado en 25.00 USD
Para calcular el costo de la mano de obra del montaje e instalaciones eléctricas, se
utiliza el mismo criterio, pero asignando a K un valor de 2.50 USD.
En la tabla 3.2, se detalla el costo de la mano de obra del proyecto, considerando
que para el rubro de ingeniería intervienen dos personas con una carga laboral neta
de 30 días y 8 horas diarias.
Para el montaje e instalaciones eléctricas, también se calcula con dos personas con
una carga laboral de 10 días y 8 horas diarias.

115
Tabla № 3.1 Detalle de costos del proyecto
ITEM CANTIDAD DESCRIPCIÓN
VALOR
(usd)
1 1 Computadora 900
2 1 Motor Reductor 50
3 1 Cámara 220
4 global Sistema Neumático 300
5 global Sensor 15
6 1 Banda de Transporte 200
7 1 Armario 50
8 global Componentes de fuerza 15
9 global Componentes de protección 10
10 global Materiales de oficina 30
11 global Movilización 50
12 global Uso de Internet 20
TOTAL: 1860
Tabla № 3.2 Costo de la mano de obra del proyecto
ÍTEM DESCRIPCIÓN K
(USD) No.HORAS-HOMBRE
SUBTOTAL (USD)
1 Ingeniería del proyecto
25 480 12000
2 Montaje e instalaciones eléctricas
2.50 160 400
Total
12400
Por lo tanto, el costo total del proyecto es la suma de los rubros de los componentes
y de la mano de obra, obteniendo la cantidad de 14260 dólares americanos.
3.5 ALCANCES Y LIMITACIONES.
Una vez concluido el proyecto y con los resultados experimentales y las pruebas
obtenidos, se indican a continuación los alcances y limitaciones del mismo.
3.5.1 Alcances
Por ser un programa modular se lo ha creado para distintos tamaños de botellas.

116
En las pantallas de las HMI‘s se puede visualizar las variables en tiempo real, lo
que permite al operador tomar las decisiones instantáneamente.
Ahorro del espacio físico y mayor orden en el trabajo.
Por la tecnología usada, hace posible modificar al programa para que analice
más ítems para los que fue creado.
La cámara de iluminación se la puede utilizar para otras aplicaciones de visión
ya que se logró obtener una iluminación uniforme, lo que favorece al contrastar al
producto a analizarse.
El diseño desmontable de la banda de transporte facilita el traslado a
cualquier sitio.
Las pantallas creadas para este proyecto en labVIEW son amigables lo que
facilita al operador su fácil configuración.
Con el análisis estadístico obtenido, se puede conocer la eficiencia de la
tecnología utilizada para el envasado del producto.
3.5.2 Limitaciones
La capacidad de la cámara limita el análisis de las imágenes a velocidades altas,
por lo que se necesitaría una cámara progresiva lo que representa un costo muy
elevado.
Con respecto a la banda se limita a una sola velocidad ya que se utilizó un motor
reductor por lo que el análisis se lo realiza a velocidad constante.
Los costados de armario fueron creados para botellas de un máximo de 24 cms.
de alto aunque el análisis se lo puede realizar en botellas de cualquier tamaño.

117
El análisis realizado en las botellas se limita únicamente a la variable de nivel de
llenado de las mismas, más no a otros defectos tales como botellas rotas,
sucias, tapas mal puestas o botella sin etiqueta etc.
El proyecto fue pensado en realizarlo solo para líquidos de color oscuro en
recipientes transparentes y no en botellas con recipientes del mismo color del
líquido, sin embargo se ha probado en líquidos de otro color con recipiente
transparente y se ha verificado la validez del programa diseñado en LabVIEW y
IMAQ Visión. Cabe señalar que el programa no funciona con líquido
transparente.
Se adquirió una PC de última generación con características muy significativas
por lo que la adquisición de las imágenes se lo tiene que realizar a la máxima
velocidad (400 Mbps) ya que de lo contrario ni si quiera se puede visualizar la
imagen en el computador.
Es imposible por software tratar de configurar todo el contraste del objeto a
inspeccionar, obligatoriamente se necesita de una cámara de iluminación para
mejorar la imagen y aprovechar al máximo sus características.
Las botellas solo pueden circular por la banda una a la vez debido al diseño
angosto de la misma y en intervalos de 500 milisegundos, ésto para que los
dispositivos neumáticos regresen a su posición inicial de trabajo.

118
1.1
1.1
1.1
1.1
1.1 CAPÍTULO IV
1.1 CONCLUSIONES Y RECOMENDACIONES
Una vez culminado el presente proyecto de tesis de grado titulado ―DISEÑO E
IMPLEMENTACION DE UN SISTEMA DE CONTROL Y VERIFICACIÓN DEL
PROCESO INDUSTRIAL DE NIVEL DE LLENADO DE BOTELLAS UTILIZANDO
LabVIEW y IMAQ Visión‖, se llega a las siguientes conclusiones y recomendaciones.
4.1 Conclusiones
Es posible adaptar los sistemas de acuerdo a las necesidades. En este trabajo se
adaptó el sistema de visión existente al nuevo entorno del conjunto de inspección
(armario, sensor y cámara). Para conseguir tal objetivo, se hicieron cambios
físicos en el armario que contiene la cámara, así como se adquirieron guías
sobre las que se fijan el sensor y cámara dentro del armario.
Es necesario contar con un sistema de iluminación uniforme, en este caso se
proporcionó una iluminación uniforme en el interior del armario que contrasta de
mejor manera la botella a inspeccionar, lo que evitó que se lo realizara por
software, simplificando la complejidad del programa en LabVIEW.
Se requiere de la inclusión de un sistema que detecte la presencia de los
elementos, por lo que se incorporó al sistema un sensor Fotoeléctrico para
detectar la presencia de la botella. Con la señal que proporciona este sensor
comienza la adquisición y procesado de la imagen, la cámara únicamente capta
imágenes en el momento de la llegada del objeto a examinar.

119
Es necesario contar con un sistema de control neumático para la clasificación del
producto, por lo que se diseñó un mecanismo para la expulsión de la botella
mediante un pistón de simple efecto. El accionamiento del pistón se controla
mediante una electroválvula. Por tanto, se diseñó una aplicación para conmutar
la electroválvula a través del PC (escritura desde labVIEW a la tarjeta USB).
Es conveniente la creación de un programa de control que facilite su modificación
para el análisis de un mayor número de variables, por lo que se rediseñó y creó
varias partes del software en labVIEW que controla el sistema. Por un lado, se
programó la sincronización entre la llegada de la botella y la captación de la
imagen, y por otro lado se agregó la parte de control al no cumplir la botella con
lo establecido en la calibración (control de electroválvula a través del PC).
Se requiere que todo el prototipo funcione correctamente y en un tiempo
prolongado, por lo que se comprobó el correcto funcionamiento del conjunto
hardware-software, realizando pruebas experimentales. Se han podido
comprobar también ciertas limitaciones del sistema ya sea por la velocidad de la
banda o a la hora de poder captar la imagen en la posición exacta.
Es necesaria la coordinación de los tiempos en la detección de la imagen a
través del sensor, así como la activación de la electroválvula para el
accionamiento del cilindro al detectar el producto defectuoso, por lo que se
estableció el tiempo exacto de conmutación requerido en el prototipo.
Se requiere direccionar al producto correcto e incorrecto hacia un lugar de
destino, por lo que se colocó recipientes que se encuentran adheridos a la mesa
que contiene la banda de transporte.
Debido al elevado costo del software de aplicación y demás dispositivos resulta
costoso la implementación de sistemas de visión, por lo que para fines de
proyecto es necesario tener el financiamiento de alguna empresa que necesite
de esta tecnología.
En definitiva, se ha podido adaptar el sistema ya existente de visión artificial a un
nuevo entorno menos limitado. Por tanto, se ha dado un paso adelante a la hora de

120
poder flexibilizar al máximo esta aplicación de control de nivel, ya que esta nueva
situación se asemeja más a los casos reales de producción industrial.
De todas maneras, aún existe bastante margen de mejora para hacer de éste un
sistema robusto y aplicable en entornos agresivos y con más fluctuación de
variables. Es decir, se podrían implementar, por ejemplo, acciones correctivas en
situaciones de emergencia. En tales casos, el sistema diseñado no está preparado
para actuar ante situaciones imprevistas.
4.2 Recomendaciones
Para el correcto funcionamiento del sistema de inspección se debe seguir a
cabalidad las instrucciones indicadas en el manual de operación y
mantenimiento.
El diseño de las pantallas de la aplicación realizadas en labVIEW deben
contener la información necesaria y no abundante de manera que sean
amigables para el usuario final, el mismo que no está obligado a conocer
detalladamente la parte que constituye el software.
En las acciones de mantenimiento preventivo y correctivo del sistema de
inspección, se recomienda suspender la energía de alimentación, sea ésta,
eléctrica, o neumática, evitando de esta manera acciones y condiciones
inseguras.
Cuando se elige el sensor es muy importante conocer el tipo de material que
sensa, así como la distancia máxima de detección, con la finalidad de que no se
generen errores al momento de la aplicación.
IMAQ Visión es un software muy robusto para el tratamiento de imágenes, por tal
razón es muy utilizado en la industria para control de calidad, por lo que es

121
necesario el conocimiento básico de esta herramienta que hoy en día se la está
desarrollando a nivel mundial.
Para el desarrollo de sistemas de visión, es necesario realizar un análisis de
costos y factibilidad de adquisición de los dispositivos que intervendrán en el
proyecto.
Antes de empezar con la ejecución de un proyecto de visión artificial, asegurarse
de tener el módulo completo de visión y la cámara idónea para el proceso que se
desee realizar.
4.3 BIBLIOGRAFÍA
1 PAJARES Gonzalo, DE LA CRUZ Jesús ―Visión por computador, imágenes
digitales y aplicaciones‖, Universidad complutense de Madrid, Madrid –
España, 2002.
2 CEKIT, ―Electrónica Industrial y automatización‖, Perea-Colombia, 2002
3 National Instruments, ―IMAQ Vision Builder Tutorial‖ – 1999.
4 National Instruments, ―IMAQ Vision for G Reference Manual‖ – 1999.
5 National Instruments, ―IMAQ Vision User Manual‖ – 1999.
6 National Instruments, ―visionkit tutorial‖
4.4 ENLACES
1 National Instruments - Measurement and Automation
http://www.natinst.com/
http://digital.ni.com/public.html
2 Research Group of Computer Vision and Artificial Intelligence
http://iamwww.unibe.ch/~fkiwww/Welcome.html

122
3 Grupo de Visión Artificial
http://www-gva.dec.usc.es/
http://www.educa.madrid.org
4 WIP Proyectos Industriales
http://www.wip.es
http://haydn.upc.es/people/scuen/publications/Fundamentos%20de%20maquinas%20de%20vision%20en%20la%20industria.pdf
5 Unibrain
http://www.unibrain.com
6 Instrucontrol
http://www.instrucontrol.com
http://www.uv.es/~marinjl/electro/reles.html
7 IEEE-1394
http://www.w3.org/1999/xhtml"><HEAD><TITLE>IEEE 1394 - Wikipedia, la enciclopedia libre</TITLE
8 INSETEC
http://www.insetec.com.ec

123
1.1 ANEXO A
1.1 GLOSARIO DE TÉRMINOS
A
Actuador neumático: Dispositivo capaz de transformar la energía potencial del aire comprimido en trabajo mecánico.
B
Bit: Digito binario, puede ser cero o uno lógico.
Bitmap: Mapa de bits.
Byte: Ocho bits relacionados de un dato, también denota la cantidad de memoria
requerida a guardar un Byte de datos.

124
BMP: Mapa de bit. Formato de archivo de imagen comúnmente usado para 8-Bit en
imagen de color.
Buffer: Almacenamiento temporal en la memoria para los datos adquiridos.
Borde: Definido por una transición repentina de la intensidad de un píxel en una
imagen o a lo largo de un array de píxeles.
C
CCD: (Charge Coupled Device) Matriz rectangular de miles de semiconductores
interconectados.
D
Driver: Software que puede controlar un hardware especifico, como puede ser un
dispositivo de adquisición e imágenes o un dispositivo DAQ
Distancia de calibración: Determina las dimensiones físicas de un píxel para definir
las dimensiones físicas de una línea en una imagen.
DAQ: Dispositivo de adquisición de datos.
F
FOV: (Field of View) Campo de vision.
Fps: (Frames per second) Tramas por segundo.
G
GPIB: Bus de interfase de propósito general
125
H
HSL: Esquema de color que usa información en código, color, saturación y
luminancia.
HIS: Esquema de color en código en color, saturación y intensidad.
Hardware: Todos los elementos físicos del computador o tarjetas de adquisición.
I
Imagen digital: Imagen f(x,y) convertida entre un número discreto de píxeles, se
especifican coordenadas espaciales y brillo.
IMAQ: Herramienta que sirve para realizar pruebas y ensayos en aplicaciones de
procesado de imágenes.
IEEE 1394: Estándar de comunicación. I/O: Entrada o salida de datos.
J
JPEG: Formato de archivo de imagen que almacena 8 bits.
L
LED: Diodo emisor de luz.
M
Mbps: Mega bit por segundo.
MAX: (Measurement & Automation Explorer). Asistente de LabVIEW que permite
configurar dispositivos de adquisición de datos.

126
MSB: Bit más significativo.
N
NI: National Instruments. Nivel GRIS: El brillo de un píxel en una imagen. NI-IMAQ: Software de interfaz para dispositivos de adquisición de imágenes para
National Instruments.
P
PC: Computador personal. Píxel: Es un elemento cuadrado, constituye la unidad mas pequeña en video. PSI: Unidad de presión. Libra por pulgada cuadrada.
R
ROI: (Region of Interest) Región de interés en una imagen. RGB: (Red, Green, Blue) Información donde cada píxel en una imagen de color es
puesto en código usando 32 bit.
Resolución: Tamaño de píxel RF: Radio frecuencia.
S
Software: Conjunto de programas que ejecuta el computador. Standby: Modo en espera.
T
Testeo: Prueba.

127
Trigger: Disparo.
V
VI: Instrumento virtual VDC: Voltaje en corriente continua

128
1.1 ANEXO B
1.1 CONFIGURACIÓN DE LA CÁMARA
1.1 Fire-i
TM

129
1. Instalación del Hardware
Inserte el adaptador del trípode al trípode. Gire el rodillo como se muestra en la
fig. B1.
Figura B1 Adaptador
Inserte el adaptador detrás de la cámara. Fig. B2.

130
Figura B2 Cámara con el adaptador
Conecte el cable de 6 pines en la cámara. Fig. B3.
Figura B3 Conexión del cable

131
Inserte el cable en la tarjeta Fire-i 1394 de la PC. Fig. B4.
Figura B4 Conexión del cable en el puerto FireWire
2. Instalación del Software Fire-i™ es un software amigable para aplicaciones Windows 2000/2003/Vista & XP
64 bit.
En la instalación se debe considerar:
Verificar el sistema operativo de la PC (Windows 2000/XP/2003/Vista o XP 64
bit).
Desinstale cualquier versión anterior de software Fire-i
Instalar el Firei Setup.3.61.x 64.exe (para 64-bit sistema operativo) o el Firei
Setup.3.61.x 86.exe (para 32-bit sistema operativo).
Desconectar cualquier cámara de la tarjeta Firewire.
Es importante recalcar lo dicho anteriormente, Los Drivers de la cámara Unibrain's
Fire-i™ son compatibles con los de la National Instruments por lo que no es
necesario la instalación de los drivers que incluye el paquete.
2.1 Importante comentario para Windows XP: A pesar de poseer el paquete de
Microsoft, es recomendado considerar que la aplicación de SP2 en Windows XP
puede reducir el ancho de banda de su Fire-i a 100 Mbps si cualquier adaptador o
dispositivo 1394-b está conectado.

132
Si se requiere adquirir imágenes o video con la cámara Fire-i™ y no se posee
labVIEW con IMAQ Visión en el momento o simplemente se requiere comprobar el
correcto funcionamiento de la cámara se procederá a la instalación de los drivers
que incluye el paquete, cuyos pasos se lo indica a continuación:
3. Instalación
Corra el FireiSetup.3.61.x 64.exe o el FireiSetup.3.61.x86.exe file.
Escoja instalación completa.
El cuadro de la figura B5 describe la instalación del proceso, en caso de haber
alguna cámara conectada a la PC, debería desconectarla y dar clic en OK.
Figura B5 Asistente para la instalación
En el siguiente diálogo escoja ―Typical‖ y presione siguiente, seleccione Finish en el
último diálogo y el proceso de instalación terminará.
4. Corriendo la aplicación
Seleccione desde Windows ―Menú Inicio/ Programas / Fire-i / Fire-i Aplicaciones.
O también se puede crear un acceso directo en el escritorio: Clic derecho en el ratón
y enviar a ―escritorio‖.
Se debe conectar la cámara antes de inicializar el programa. Fig. B6

133
Figura B6 Corrido del programa
Para mejorar la imagen de la cámara se puede rotar el anillo del lente para una
mejor nitidez de la imagen. Fig. B7.
Figura B7 Mejoramiento de la imagen
5. TIPS GENERALES
Una gran ventaja de estas cámaras es que todas necesitan una sola fuente de
alimentación localizada en cualquier parte del bus 1394. Este podría ser el
adaptador 1394 en el caso del computador, o un adaptador DC conectado unas de
las cámaras o una fuente DC conectado, en cualquier parte del bus. Fig. B8.

134
Figura B8 Conexión entre cámaras
ENCENDIDO DE LA CÁMARA
El estado de operación de la cámara está indicado por el LED frontal.
Cuando el LED está color verde, la cámara está correctamente conectada en modo
stand by, lista para su uso. Fig. B9.
Figura B9 Encendido de la cámara
Cuando el LED cambia a color tomate, la cámara está en operación
Figura B10 Cámara en operación

135
ANEXO C
CONFIGURACIÓN DEL MAX (MEASUREMENT & AUTOMATION EXPLORER)
NI USB-6009

136
1. CONFIGURACIÓN La NI USB-6009 es una tarjeta de la National Instruments que posee 8 entradas,
14 bit, I/O multifunción.
La configuración así como el correcto funcionamiento de la misma se lo puede
realizar y verificar desde el Máx (Measurement & Automation Explorer) el acceso a
éste se lo detalló en los Anexos anteriores, una de las formas de acceso se lo
muestra en la figura C1.
Figura C1 Acceso al MAX
Abierto el MAX, previamente conectado la DAQ en la PC, se observa el
dispositivo reconocido en cuya pantalla también se visualizan opciones que
permitirán configurar como se muestra en la figura C2.

137
Figura C2 Dispositivo reconocido
2. SELF-TEST nos indica que el dispositivo ha pasado la prueba de reconocimiento
como se muestra en la figura C3.
Figura C3 Suceso
3. TEST PANELS
Presenta en la pantalla varias opciones de configuración para.
- Entradas análogas
- Salidas análogas
- I/O digital
- Contador I/O

138
3.1 Entradas análogas
Existe una serie de opciones de configuración como se muestra en la figura C4:
Nombre del canal (Channel Name) 8 canales ai0/ai7.
Modo (Mode) existen tres modos:
a. Sobre demanda (on demand)
b. Finito (Finite)
c. Continuo (Continuous)
Configuración de entradas (Input configuration)
a. Diferencial (Differential)
b. RSE
Límite máximo de entrada (Max input limit)
Límite mínimo de entrada (Min input limit)
Figura C4 Test panels/entradas análogas

139
Amplitud Vs. Trazo de las muestras (Amplitude vs. Simples chart) se puede
observar en la figura C5 el trazado de las muestras de las entradas análogas.
Figura C5 Trazado de entradas análogas
3.2 Salidas análogas
Existe una serie de opciones de configuración como se muestra en la figura C6:
Nombre del canal (Channel Name) 8 canales ao0/ao7.
Modo (Mode)
a. DC Value

140
Configuración de entradas (Input configuration)
a. Diferencial (Differential)
b. RSE
Límite máximo de salida (Max input limit)
Límite mínimo de salida (Min input limit)
Esta opción permite configurar el valor digital de salida como límite mínimo 0 y
máximo 5.
Figura C6 Test panels/salidas análogas

141
3.3 Digital I/O
Existe una serie de opciones de configuración como se muestra en la figura C7:
Seleccione puerto (select Port), puerto 0-1.
Seleccionar dirección (Select dirección) aquí seleccionamos la dirección de
entrada y salida.
Seleccionar Estado (Select State) en esta opción seleccionamos el estado alto
1 o bajo 0 de la dirección seleccionada anteriormente.
La validez de esta configuración se puede comprobar utilizando para la entrada la
fuente que posee la propia NI UBS-9006 y enviando una señal a la dirección
configurada como entrada y se podrá observar el encendido de un led en la opción
seleccionar estado. Para la salida de datos digitales se puede utilizar un led
conectado a la salida de la dirección configurada como salida y desde la misma
opción ―seleccionar estado” enviar un 1 lógico.
Figura C7 I/O Digital

142
3.4 Contador I/O Digital Existe una serie de opciones de configuración como se muestra en la figura C8:
Nombre del canal (Channel Name), ctr0.
Modo (Mode), Contador de flancos
Borde fuente (Edge Source), PFI0
Figura C8 Contador I/O Digital

143
4. CREATE TASK
Esta opción sirve para crear tareas específicas en I/O digitales, I/O análogas así
como en contadores I/O, permitiendo seleccionar canales físicos a tareas
específicas como se muestra en la figura C9.
Figura C9 Creador de tareas

144
1.1 ANEXO C
1.1 CARACTERÍSTICAS DE LA TARJETA
FIREWIRE
1.1 IEEE-1394

145
1. DISTRIBUCIÓN DE PINES
En la figura C1 se ilustra la distribución de pines de la tarjeta FireWire.
1.1 Figura C1 Distribución de pines
1.1
1.1 2. CONFIGURACIÓN DE LA TARJETA FIREWIRE IEEE 1394
En la actualidad las computadoras de última generación incluyen en su hardware
este puerto, en el mercado existe una gran variedad de tarjetas y a un costo muy
reducido.
Al momento de implementarla en el PC y al reiniciar su computadora es reconocida
automáticamente, pero si no hace se seguirá el siguiente procedimiento:
En el menú INICIO>>panel de control >> agregar hardware damos doble Clic, Fig. 2

146
Figura 2 Panel de control
Es necesario especificar que al adquirir la tarjeta IEEE 1394 no incluye CD de
instalación ya que no se lo necesita, el asistente ayudara a instalar el hardware
agregado. Fig. 3

147
Figura. 3 Asistente para agregar Hardware Una vez presionado siguiente la PC empieza a buscar el hardware conectado Fig. 4
Figura 4 Asistente de búsqueda de Hardware
Una vez reconocido el hardware instalado, seleccionamos la primera opción.
Fig. 5
Figura 5 Reconocimiento de hardware

148
―El siguiente hardware ya esta instalado en su equipo‖ este mensaje nos indica
que ha sido reconocido el hardware instalado de manera exitosa. . Fig. 6
Figura 6 Dispositivo reconocido
Cuando existen problemas en reconocer un dispositivo de hardware ya sea por mala
conexión o de mal estado del componente muestra la siguiente pantalla. Fig. 7
Figura 7 Dispositivo no reconocido

149
Si la agregación de hardware es exitosa . Fig. 8
Figura 8 Finalización del asistente 3. Actualización del controlador Otro procedimiento similar a la anterior es utilizando el ―administrador de
dispositivos” que nos muestra una lista de dispositivos de hardware instalados en
el equipo. Además este administrador nos permite cambiar las propiedades de
cualquier dispositivo.
Para acceder al administrador de dispositivos realizamos al siguiente procedimiento:
Clic derecho MI PC la opción Propiedades. Fig. 9

150
Figura 9 MI PC- propiedades
Una vez en propiedades del sistema Clic en Hardware. Fig 10.
Figura 10 Propiedades el sistema
Dado clic en hardware despliega 3 opciones cada una de ellas nos explica su
utilidad, escogemos la primera ―Administrador de dispositivos‖. Fig. 11.

151
Figura 11 opciones de hardware
Ingresado en el administrador se observa una serie de dispositivos de hardware
instalado en el equipo. Fig. 12.

152
Figura 12 Dispositivos instalados
Clic en ―Controladoras de host de bus IEEE 1394” Y se despliega
―Controladoras de host VIA OHCI compatible con IEEE 1394”. Fig. 13
Figura 13 Controlador de host de bus IEEE 1394

153
Clic derecho en ―Controladoras de host VIA OHCI compatible con IEEE 1394”
escogemos opción “Actualizar controlador”. Fig 14
Figura 14 Opción-Actualizar controlador
Automáticamente se despliega el asistente para actualización de hardware como
no se necesita de CD de instalación escogemos la primera opción. . Fig.
15.
Figura 15 Actualización automática

154
Una vez actualizado. . Fig. 16
Figura 16 Asistente para actualización de hardware
Y por último. . Fig. 17
Figura 17 Finalizar

155
1.1 ANEXO D

156
1.1 MANUAL DE USUARIO
1.1
1.1
1.1
1.1
1.1
1.1
1.1
1.1
1.1 MANUAL DE OPERACIÓN
En el presente anexo se indican los procedimientos que se debe seguir para la
operación del sistema diseñado, tanto para la maniobra del sistema de
transportación, neumático, montaje de la cámara, como también a través del
programa en labVIEW. El presente proyecto ha sido diseñado en una forma sencilla
para que cualquier persona con conocimientos básicos de computación lo pueda
manipular.
1.- CONEXIÓN DE LA TARJETA USB A LA PLACA DE CONTROL
1.1 Conexión de la alimentación

157
Para el funcionamiento correcto de la placa de control que permite introducir la señal del
sensor para la adquisición de la imagen, así como la señal de salida hacia el sistema
neumático se debe realizar la alimentación en los diferentes dispositivos electrónicos,
neumáticos y de fuerza que necesita el sistema.
Cabe señalar que la placa de control está fijada en una base deslizable y en ésta a su vez se
encuentra ubicada en su exterior una bornera debidamente señalizada con cada una de las
alimentaciones y señales que se manejan en el proceso. Para efectuar una conexión idónea
se debe seguir los siguientes pasos.
1.- Conectar los tres terminales del sensor fotoeléctrico en la bornera.
Café (alimentación)
Negro (Salida)
Azul (GND)
Nota: La alimentación del sensor puede variar de 10VDC a 36VDC.
2.- Conectar la alimentación propia de la tarjeta USB (5V) al terminal de la
bornera.
3.- Conectar el terminal de la tarjeta USB ―P0‖ al terminal de la bornera indicada
con el mismo nombre, esta línea es utilizada como una entrada digital que es
ingresada al computador para indicar al software de control el inicio de la
adquisición de la imagen.
4.- Conectar el terminal de la tarjeta USB ―P1‖ al terminal de la bornera indicada
con el mismo nombre, esta línea es utilizada como una línea digital que permite
la activación del sistema neumático.
5.- Conectar la alimentación de 12V al terminal de la bornera, ésto permitirá el
funcionamiento del sensor y demás dispositivos electrónicos que intervienen en
la placa de control.
6.- Conectar la alimentación de 24V al terminal de la bornera, esta tensión
permite el funcionamiento de la electroválvula.

158
7.- Conectar el enchufe de 110V para activar el motor así como el circuito de
iluminación.
2 CONEXIÓN DE DISPOSITIVOS
1.- Conectar el cable IEEE-1394 en el puerto Firewire del computador.
2.- Conectar el cable de la tarjeta USB en el PC.
3.- Conectar la alimentación de aire a la electroválvula, no exceder una presión
de 10 bar.
3.- MONITOREO O SUPERVISIÓN DESDE labVIEW
Para supervisar el proceso desde el programa labVIEW, se debe seguir los
siguientes pasos.
3.1 Pantalla principal
En la Fig. D1 se muestra la pantalla que da inicio al programa, en la misma se
encuentran tres botones como son:
3.1.1 Calibración.- Accede a la pantalla en donde permite hacer los ajustes
de nivel de líquido.
3.1.2 Monitoreo.- Accede a la pantalla donde se visualiza el monitoreo en
tiempo real.
3.1.3 Salir.- Abandona la ejecución del programa
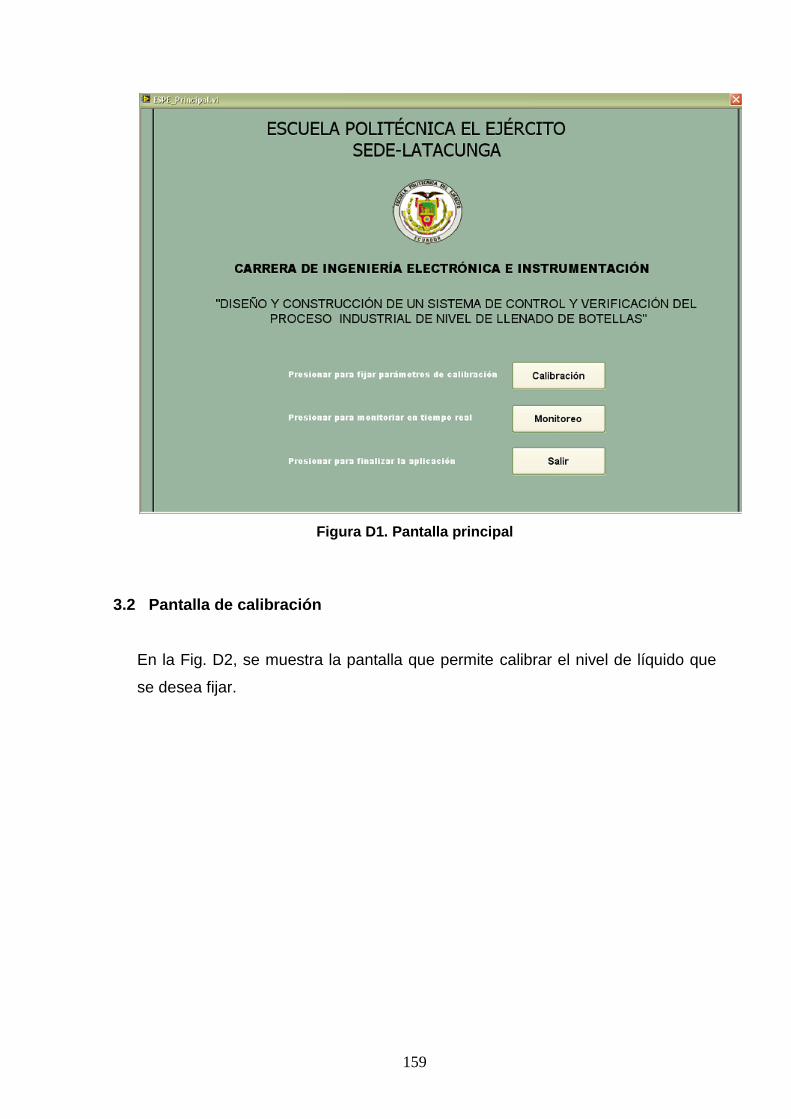
159
Figura D1. Pantalla principal
3.2 Pantalla de calibración
En la Fig. D2, se muestra la pantalla que permite calibrar el nivel de líquido que
se desea fijar.

160
Figura D2. Pantalla de calibración
En ésta pantalla se encuentran dos opciones de calibraciones que se explican a
continuación:
3.2.1 Aprender nivel.- Esta opción delimita la zona de análisis, es decir no se
considerará la imagen desde la región marcada hacia la parte superior, para ello
se utiliza el mouse para señalar la región como se muestra en la Fig. D3.

161
Figura D3. Señalando con el mouse
Luego de ésto presionar el botón aprender nivel para fijar la zona marcada. Una vez
presionado, se puede verificar si ha sido aceptado observando la imagen que se
encuentra en la parte superior del mencionado botón como se muestra en la Fig. D4.
Figura D4. Verificación de la zona marcada

162
3.2.2 Aprender Intervalo.- Este control establece el rango del líquido que
regirá en todo el proceso, de igual manera que en la opción anterior, se
marca el intervalo deseado con el mouse como se muestra en la Fig. D5.
Figura D5. Aprender intervalo
Luego de ésto, presionar el botón aprender intervalo para fijar la zona marcada, una
vez presionado se puede verificar si ha sido aceptado observando la imagen que se
encuentra en la parte superior del mencionado botón como se muestra en la Fig. D6.
Una vez realizada la calibración respectiva, presionar aceptar para finalizar el
proceso de calibración, en donde automáticamente regresa a la pantalla principal
para continuar con la siguiente opción.

163
Figura D6. Verificación de la zona marcada
3.3 Pantalla de monitoreo
Esta pantalla permite visualizar la imagen de la botella en tiempo real, la misma que
solo es adquirida cuando el sensor detecta su presencia, en la Fig. D7 se muestra la
pantalla de monitoreo, en la cual se puede observar en forma gráfica y numérica el
número de botellas buenas y malas así como su total, además existe un indicador
booleano que cambia a color verde si el producto cumple con las características
calibradas y por el contrario si no cumple con las mismas cambia a color rojo; existe
también un indicador numérico con el nivel estimado de líquido que indica el
promedio de las coordenadas de los píxeles en el eje x.

164
Figura D7. Pantalla de monitoreo en tiempo real
3.3.1 Análisis del producto
Cuando la botella es detectada, aparece su imagen y se puede observar que el nivel
está dentro del rango, es analizada en visión y destinada como buena, por lo que
seguirá en la banda de trasporte hacia su destino como se muestra en la Fig. D8.
Figura D8. Nivel correcto

165
Por el contrario, cuando el software de inspección la detecta como mala, al no
cumplir con las caracteristicas de calibración, la botella será separada de la banda
de transporte y el operario podrá visualizar este efecto, como se muestra en la Fig.
D9.
Figura D9. Nivel incorrecto
1.1
1.1
1.1
1.1
1.1

166
Latacunga, Septiembre del 2007
Elaborado por:
______________________________________ CBOP. de I. Gavilánez F. Héctor M.
______________________________________ Albán C. Edwin D.
EL COORDINADOR DE LA CARRERA DE INGENIERÍA EN ELECTRÓNICA ESPECIALIDAD INSTUMENTACIÓN
______________________________________ Ing. Armando Álvarez
DIRECTOR DE LA UNIDAD DE ADMISIÓN Y REGISTRO
______________________________________ Ab. Eduardo Vásquez Alcázar