estado del arte de la domótica
TRANSCRIPT

Universidad de Costa Rica
Facultad de Ingeniería
Escuela de Ingeniería Eléctrica
IE-0502 Proyecto Eléctrico
Estado del arte de la domótica en el 2012 y sus avances en
iluminación LED y alarmas inteligentes
Por:
Francisco Javier Vargas Morales
Ciudad Universitaria Rodrigo Facio
Julio del 2012

ii
Estado del arte de la domótica en el 2012 y sus avances en
iluminación LED y alarmas inteligentes
Por:
Francisco Javier Vargas Morales
Sometido a la Escuela de Ingeniería Eléctrica
De la Facultad de Ingeniería
De la Universidad de Costa Rica
Como requisito parcial para optar por el grado de:
BACHILLER EN INGENIERÍA ELÉCTRICA
Aprobado por el Tribunal:
____________________________
Dr. Jaime Cascante Vindas
Profesor Guía
____________________________ ______________________________
Msc. Jose Luis López Sauma Ing. Luis Fernando Andrés Jácome
Profesor Lector Profesor Lector

iii
DEDICATORIA
Este trabajo se lo dedico en primer lugar a Dios, quien me ha bendecido y me ha
dado fuerzas durante mi proceso de estudio para poder salir adelante y lograr mis metas.
De manera muy especial, a mi madre Erlinda Morales Mesén y a mi padre Francisco
Vargas Matamoros, quienes me han brindado la oportunidad de estudiar, me han
aconsejado, y que siempre me han servido como un ejemplo de lucha, trabajo y superación.
A mi hermana Verónica Vargas Morales, que siempre me ha servido de ejemplo en
el estudio y en la vida en general, y que siempre ha estado ahí cuando la he necesitado.
iv
RECONOCIMIENTOS
Un agradecimiento a los profesores Dr. Jaime Cascante, Msc. José Luis López
Sauma e Ing. Luis Fdo. Andrés Jácome por la paciencia que me tuvieron durante todo el
período que me tomó realizar el presente trabajo y por sus aportes en relación con el
mismo.
v
ÍNDICE GENERAL
ÍNDICE DE FIGURAS ...................................................................................................................... vii
ÍNDICE DE TABLAS ........................................................................................................................ ix
NOMENCLATURA ............................................................................................................................x
RESUMEN ......................................................................................................................................... xii
CAPÍTULO 1: Introducción................................................................................................................ 1
1.1 Objetivos ................................................................................................................................... 3
1.1.1 Objetivo general: ......................................................................................................... 3
1.1.2 Objetivos específicos: ................................................................................................. 3
1.2 Metodología ........................................................................................................................ 4
CAPÍTULO 2: Introducción a la domótica ......................................................................................... 5
2.1 ¿Qué es la Domótica? ......................................................................................................... 5
2.2 Servicios y beneficios que se buscan con la domótica ....................................................... 8
2.2.1 Confort, ocio y entretenimiento................................................................................... 9
2.2.2 Seguridad ................................................................................................................... 10
2.2.3 Climatización y ahorro energético ............................................................................ 11
2.2.4 Servicios comunitarios .............................................................................................. 14
2.3 Partes de un sistema domótico ......................................................................................... 14
2.3.1 Sensores ..................................................................................................................... 15
2.3.2 Actuadores ................................................................................................................. 25
2.3.3 Unidad(es) de control ................................................................................................ 28
2.3.4 La pasarela residencial .............................................................................................. 31
2.4 Redes Domóticas ................................................................................................................... 33
2.4.1 Red de datos ................................................................................................................. 33
2.4.2 Red Multimedia ............................................................................................................. 34
2.4.3 Red de Control ............................................................................................................. 35
2.4.3.1 Topologías usadas en Redes de Control ................................................................ 36
2.4.3.2 Arquitecturas usadas en Redes de Control ............................................................ 38
2.4.3.3 Medios de Transporte ............................................................................................ 40
2.4.3.4 Protocolos de comunicaciones .............................................................................. 42

vi
CAPÍTULO 3. Evolución cronológica de los sistemas domóticos ................................................... 46
3.1 Evolución Pre-domótica ......................................................................................................... 46
3.2 Evolución domótica ................................................................................................................ 51
CAPÍTULO 4: Alarmas Inteligentes dentro del hogar domótico ...................................................... 58
4.1 Situación #1: intrusión de persona no deseada .................................................................. 59
4.2 Situación #2: situación de riesgo de accidente dentro del Hogar ...................................... 61
CAPÍTULO 5: Algunas técnicas de fabricación casera de sistemas domóticos ............................... 63
5.1 Control mediante PC y un puerto paralelo de la misma .................................................... 64
5.2 Control mediante PC y microcontrolador utilizando el puerto serial ................................ 65
5.3 Control mediante dispositivos remotos de manera inalámbrica ........................................ 67
CAPÍTULO 6: Ejemplo de sistema domótico comercial: línea My Home de Bticino .................... 70
6.1 Sistema de Automatización ............................................................................................... 71
6.2 Sistema de alarma.............................................................................................................. 81
6.3 Sistema de Difusión sonora ............................................................................................... 83
6.4 Sistema de Termorregulación ............................................................................................ 83
CAPÍTULO 7: Iluminación tipo LED ............................................................................................... 85
7.1 Funcionamiento del diodo LED ........................................................................................ 87
7.2 El LED para sistemas de iluminación ............................................................................... 92
CAPÍTULO 8: Propuesta de diseño domótico ................................................................................ 100
8.1 Aspectos generales acerca del Arduino .......................................................................... 100
8.1.1 Modelos Arduino ......................................................................................................... 102
8.1.2 Programación Arduino ................................................................................................ 110
8.3 Comandos ........................................................................................................................ 118
8.4 Actuadores ....................................................................................................................... 123
8.5 El controlador .................................................................................................................. 131
CAPÍTULO 9: Conclusiones y Recomendaciones ......................................................................... 136
BIBLIOGRAFÍA ............................................................................................................................. 140
ANEXOS......................................................................................................................................... 148
Anexo #1: Programa Arduino ..................................................................................................... 148
Anexo #2: Circuito Comandos en Tina ....................................................................................... 196
Anexo #3: Circuito Actuadores en Tina ...................................................................................... 197
Anexo #3: Modelo OSI .............................................................................................................. 199
vii
ÍNDICE DE FIGURAS
Figura 2.1. Hogar domótico ................................................................................................... 8
Figura 2.2. Televisor inteligente como parte de un sistema de ocio del hogar domótico ... 10
Figura 2.3. Sistema de viviendo Bioclimática ..................................................................... 13
Figura 2.4. Lámpara del tipo de iluminación LED .............................................................. 14
Figura 2.5. Señal continúa en el tiempo .............................................................................. 16
Figura 2.6. Señal discreta en el tiempo ................................................................................ 17
Figura 2.7. Termostato de Ambiente Comercial ................................................................. 20
Figura 2.8. Detector de gas natural ...................................................................................... 21
Figura 2. 9. Detector de presencia de tecnología ultrasónica .............................................. 24
Figura 2.10. Detector perimetral del tipo contacto magnético inalámbrico ........................ 24
Figura 2.11. Relé de estado sólido utilizado en sistemas domóticos ................................... 27
Figura 2.12. Electroválvula ................................................................................................. 28
Figura 2.13. Dispositivo de control domótico ..................................................................... 30
Figura 2.14. Dispositivo central de una pasarela residencial .............................................. 32
Figura 2.15. Topología en estrella ........................................................................................ 36
Figura 2.16. Topología en anillo .......................................................................................... 37
Figura 2.17. Topología en bus .............................................................................................. 37
Figura 2.18. Topología en árbol ........................................................................................... 38
Figura 2.19. Arquitectura centralizada ................................................................................. 39
Figura 2.20. Arquitectura descentralizada ............................................................................ 39
Figura 2.21. Arquitectura distribuida ................................................................................... 40
Figura 2.22. Dirección física elementos EIB ........................................................................ 44
Figura 3.1 Línea de tiempo historia Pre-domótica 1835-1940 ............................................. 47
Figura 3.2 Línea de tiempo historia Pre-domótica 1944-1971 ............................................. 47
Figura 3.3. Línea de tiempo evolución de los sistemas domóticos ...................................... 52
Figura 4.1. Situación de intrusión alarma ............................................................................. 60
Figura 4.2. Situación de fuga de gas ..................................................................................... 62
Figura 5.1. Método de control mediante PC y un puerto paralelo de la misma ................... 64
Figura 5.2. Método de control mediante PC y microcontrolador utilizando el puerto serial 66
Figura 5.3. Método de control mediante envío de datos de manera inalámbrica por medio de
teléfono móvil ............................................................................................................... 68
Figura 6.1 Conexión de los diferentes elementos al bus en la línea My Home ................... 72
Figura 6.2. Configuración de elementos línea My Home mediante el método de los
configuradores .............................................................................................................. 73
Figura 6.3. Ambientes dentro del sistema domótico ............................................................ 75
Figura 6.4. Diferentes elementos dentro de un ambiente ..................................................... 76
viii
Figura 6.5. Configuración de los Comandos y los Actuadores dentro de un ambiente de
control punto a punto, de ambiente, de grupo y general .............................................. 79
Figura 6.6. Distribución de los elementos dentro de Ambiente y Grupos, línea My Home,
Bticino .......................................................................................................................... 80
Figura 6.7. Interfaz Basic línea My Home, Bticino ............................................................. 81
Figura 7.1. Diodo LED y su simbología .............................................................................. 85
Figura 7.2. Funcionamiento del LED .................................................................................. 88
Figura 7.3. Curva característica del diodo ........................................................................... 89
Figura 7.4. Refracción de la luz en los encapsulados de LED ............................................ 92
Figura 7.5. LED de alta luminosidad utilizado para sistemas de iluminación .................... 93
Figura 7.6. Diferentes tipos de lentes de ópticas secundarias utilizados comercialmente para
la aplicación de sistemas de iluminación ..................................................................... 95
Figura 7.7. Luminaria tipo LED empotrada 2’x2’ marca Schneider ................................... 97
Figura 7.8. Luminaria tipo LED empotrada 600lm marca Schneider ................................. 97
Figura 7.9. Luminaria tipo LED mini empotrada marca Schneider .................................... 98
Figura 7.10. Luminaria tipo LED modelo Performance Step LED marca Schneider ......... 99
Figura 8.1. Diagrama de bloques sencillo de una placa Arduino ...................................... 102
Figura 8.2. Placa de microcontrolador Arduino Mega ...................................................... 105
Figura 8.3. Entorno de programación para Arduino ........................................................... 111
Figura 8.4. Primera aproximación de sistema de domótica a diseñar ................................ 115
Figura 8.5. Acercamiento al bus de comandos ................................................................... 115
Figura 8.6. Acercamiento al bus de actuadores .................................................................. 115
Figura 8.7. Forma de enviar dirección de comando ........................................................... 118
Figura 8.8. Diagrama del circuito para visualizar y configurar la dirección de los comandos
..................................................................................................................................... 119
Figura 8.9. Diagrama circuito que envía los datos del comando a través del bus de
comandos ..................................................................................................................... 120
Figura 8.10 Circuito simulado para visualizar y configurar la dirección de los comandos 121
Figura 8.11 Prueba de funcionamiento del circuito para visualizar y configurar la dirección
de los comandos .......................................................................................................... 121
Figura 8.12. Diagrama circuito para activación de Actuadores ......................................... 124
Figura 8.13. Mapa de Karnaugh para la función mínima que describe el circuito que activa
la comparación de direcciones del Actuador ............................................................... 126
Figura 8.14. Circuito que activa la comparación de direcciones del Actuador .................. 127
Figura 8.15. Función básica del interruptor electrónico para abrir y cerrar fase ................ 130
Figura 8.16. Circuito para interrumpir fase en una carga de 120V .................................... 131
Figura 8.17. Diagrama del flujo del programa del Arduino ............................................... 134
ix
ÍNDICE DE TABLAS
Tabla 7.1 Visión comparativa entre una luminaria tipo LED de 20W y otros sistemas de
iluminación .................................................................................................................... 87
Tabla7.2 Materiales Semiconductores para LED y su longitud de onda.............................. 90
Tabla 8.1 Resumen características Arduino Mega ............................................................. 106
Tabla 8.2. Código de reconocimiento de activaciones Actuadores .................................... 123
Tabla 8.3. Tabla de verdad del circuito que activa la comparación de direcciones del
Actuador ...................................................................................................................... 126
x
NOMENCLATURA
A Ambiente
API Application Programming Interface
ASHRAE American Society of Heating Refrigerating and Air-Conditioning Engineers
DIAC Diode for Alternating Current
E Elemento de ambiente
EEPROM Electrically Erasable Programmable Read-Only Memory
EHS European Home System
EHSA European Home System Association
EIA Electronic Industries Association
EIAJ Electronic Industries Association of Japan
EIB European Installation Bus
EIBA European Installation Bus Association
ESPIRIT European Scientific Program for Research & Development in Information
Technology
FTDI Future Technology Devices International
G Grupo
I2C Inter-Integrated Circuits
IHS Integrated Home System
IP Internet Protocol
IR Infrarrojo
ISCP In Circuit Serial Programming
k Kilo
xi
kWh Kilowatt hora
LED Light Emitting Diode
MAC Media Access Control
η Eficiencia
Ω Ohm
OSI Open System Interconnection
PC Personal Computer
PWM Pulse Wave Modulation
RF Radio Frequencies
SIM Subscriber Identity Module
SPI Serial Peripheral Interface
SRAM Static Random Access Memory
TCP Transmission Control Protocol
TRIAC Triode for Alternating Current
TTL Transistor Transistor Logic
UDP User Datagram Protocol
USB Universal Serial Bus
V Volt
xii
RESUMEN
En el presente trabajo se busca dar una visión integral del estado actual de la
domótica, tratando también algunas temáticas que a pesar de no ser nuevas, son parte de
conceptos importantes para poder describir un hogar domótico; tales como: los
componentes más importantes de una vivienda inteligente y las redes internas de estos
recintos.
Se repasa la evolución cronológica de los sistemas domóticos para entender el
estado del arte de los mismos.
Se le da especial importancia a los sistemas de alarmas inteligentes. Se logran
distinguir las alarmas contra intrusión y las alarmas técnicas, las primeras son orientadas a
la prevención de robo de la vivienda y las segundas, a la prevención de situaciones de
riesgo de accidente.
Se evalúan algunas propuestas existentes en la fabricación casera de sistemas
domóticos. También se estudia un ejemplo comercial de hogar inteligente distribuido por la
empresa Bticino en el país (línea My Home), basándose en una visita que se realizó a dicha
empresa.
Se evalúa la tecnología de LED como una interesante propuesta en lo que a sistemas
de iluminación tanto desde el punto de vista estético, así como alternativa de ahorro
energético en las instalaciones residenciales.
Se estudia al micro procesador Arduino, el cual es una plataforma de uso sencillo
para la creación de proyectos varios.

xiii
Finalmente, con la información recolectada, se realiza una propuesta de sistema
domótico orientado al envío y reconocimiento de direcciones por parte del microprocesador
Arduino, donde se analizan posibles circuitos para los actuadores y los comandos.
1
CAPÍTULO 1: Introducción.
La automatización en los sistemas eléctricos es un tema que ha existido desde
inicios del siglo XX a nivel industrial. Sin embargo, con el paso de los años, se fue
convirtiendo en una idea cada vez más aceptada dentro de las instalaciones de tipo
residencial, naciendo así, la idea de un hogar automatizado y de la vivienda domótica.
Debido al crecimiento exponencial en tecnología que se ha dado en los últimos
años, es cada vez más fácil agregarle una mayor cantidad de elementos al hogar domótico
con la intensión de facilitar las tareas del ser humano, así como para brindarle un mayor
nivel de confort y seguridad a su vivienda.
También, la idea de un medio ambiente libre de contaminación, así como una
sociedad en la que se busca la reducción del consumo eléctrico, ha fomentado la creación
de sistemas de ahorro energético en los sistemas domóticos, por lo que cada vez es más
común, orientar la automatización del hogar inteligente hacia técnicas con las cuales se
logre evitar el desperdicio y se puedan aprovechar al máximo otros tipos de energía que no
se originan directamente de la red eléctrica general.
A nivel mundial, el mercado domótico se encuentra en constante crecimiento,
siendo cada vez una mejor opción en las construcciones habitacionales. Desde el punto de
vista del mercado nacional, es una opción que se encuentra madurando, limitada
principalmente por altos precios en el mercado y los tradicionalismos en construcciones de

2
vivienda. Sin embargo, existe la posibilidad de que su uso aumente debido a que cada vez
existen opciones más económicas en el mercado domótico nacional.
Es debido a estos motivos, que cada vez se hacen más conocidos a nivel popular los
términos de domótica y hogar inteligente. Por esta razón, la presente investigación se
enfatiza en temáticas varias de interés domótico, tales como los sistemas de alarmas
técnicas y de intrusión utilizados en las casas inteligentes, las redes utilizadas para el
control domótico, la iluminación tipo LED, las propuestas de fabricación casera, y otros.
Para complementar el trabajo de una mejor manera, y haciendo uso de la
información obtenida, se propondrá un sistema de control electrónico para una casa
inteligente, haciendo uso de tecnología Arduino, tecnología que permite una opción de bajo
costo para futuras implementaciones.
3
1.1 Objetivos
1.1.1 Objetivo general:
- Sintetizar el estado del arte de la domótica actual, centrándose en el desarrollo de
las soluciones de bajo costo comerciales y no comerciales en iluminación LED y
alarmas inteligentes.
1.1.2 Objetivos específicos:
- Definir el concepto de “domótica”.
- Describir los elementos básicos que conforman el sistema integral de una casa
inteligente.
- Estudiar la evolución temporal - tecnológica de la domótica hasta la actualidad.
- Identificar las tecnologías de vanguardia que ofrece actualmente el mercado en
materia de domótica, enfocándose en los sistemas de iluminación LED y alarmas
inteligentes.
- Investigar acerca de los nuevos avances DIY (fabricación casera), con el fin de
ponderar las soluciones que ofrezcan buenos resultados a un bajo costo.
- Con la información obtenida, proponer una solución original de bajo costo con
tecnología Arduino, orientada hacia una implementación residencial.
4
1.2 Metodología
Con el propósito de alcanzar los objetivos del presente proyecto se procederá de la
siguiente manera:
1. Se realizará una revisión de la documentación bibliográfica necesaria acerca de la
temática de la domótica, sus partes esenciales, su evolución histórica, sus tendencias
actuales, y el ahorro energético enfatizado en la utilización de tecnología LED, tanto
en libros como en internet.
2. Además, como complemento de la información documentada, se procederá a
realizar entrevistas a personas especializadas en el tema de la domótica. Esto con el
fin de poder desarrollar un marco teórico fundamental para el entendimiento y
creación de una propuesta de domótica que se realizará.
3. Luego, se investigará a fondo el microcontrolador Arduino, el cual será la base de la
propuesta de control de casa inteligente que se realiza en el presente trabajo.
4. También se investigará en internet acerca de algunas propuestas de fabricación
casera de sistemas domóticos existentes, con el fin de fortalecer la propuesta de
diseño que se realizará.
5. Finalmente, con los conocimientos adquiridos en la investigación, se propondrá un
diseño de sistema domótico utilizando un microcontrolador Arduino, y los circuitos
electrónicos externos al mismo que sean necesarios.
5
CAPÍTULO 2: Introducción a la domótica
La casa ideal es aquella que permita a su usuario disfrutar de actividades de ocio sin
tener que preocuparse por los quehaceres varios del hogar como limpiar o regular la
calefacción, teniendo además fuertes sistemas de seguridad que le permitan salir tranquilo
de su casa.
Es así que se hace cada vez más popular la idea de domótica, pero en realidad, qué
es un sistema domótico, cuáles son sus partes más importantes y qué servicios se pueden
obtener de una casa inteligente son preguntas frecuentes en la población que se interesa por
esta temática y que se responden en el presente capítulo.
2.1 ¿Qué es la Domótica? [1]
Se entiende por domótica a una serie de elementos aplicados a la automatización
parcial o total de las funciones que se pueden realizar en una casa de habitación. Su término
se empieza a utilizar por los franceses en 1998, quienes le llamaron “domotique” (traducida
al castellano es domótica), palabra que proviene de los términos “domus” que significa
casa en latín e “informatique” (informática), aunque en ciertos textos se le otorga a esta
terminación el significado de “robotique” (robótica) y en otros el de automática. En lo que
todos coinciden es que se necesitan elementos de automatización y al menos cierto nivel de
intercomunicación entre los diferentes componentes de casa para poder llamársele recinto
domótico.

6
Concepto de casa u hogar inteligente
El concepto de “casa u hogar inteligente” proveniente del término en inglés “Smart
Homes” ha sido difundido en Estados Unidos desde tiempos antes de que naciera la
terminología domótica, aunque desde entonces se ha utilizado para identificar a recintos
que tienen ciertas características domóticas; de hecho, la terminología “inteligente” se
utiliza en ámbitos informáticos para diferenciar terminales con capacidad autónoma de los
que no la tienen.
Domótica vs Inmótica
La domótica se suele confundir con la inmótica. La inmótica es básicamente la
aplicación de los elementos del automatismo en busca del confort, seguridad y ahorro
energético en los edificios de una manera más industrial, buscando también maximizar la
producción para la cual son destinados estos edificios. Acerca de este tema, el libro de texto
“Domótica: Edificios Inteligentes” menciona textualmente:
“…Mientras la palabra domótica se aplica al hogar, por inmótica se entiende la
incorporación de sistemas de gestión técnica automatizada a las instalaciones del
sector terciario como son las plantas industriales, hoteles, hospitales, aeropuertos,
7
edificios de oficinas, parques tecnológicos, grandes superficie, universidades,
instalaciones comunitarias en edificios de viviendas, etc.…” [1]
Hogar digital
Es importante también definir el concepto de “Hogar Digital”, concepto con el que
suele correctamente referirse a la domótica, porque de hecho, forma parte de las tendencias
actuales de la misma. Básicamente, el Hogar Digital busca la convergencia de la parte de
entretenimiento, comunicaciones, control de dispositivos domóticos, alarma y demás
elementos de la casa por medio de una red de banda ancha, formando redes de hogar que se
puedan intercomunicar con el exterior. En la figura 2.1 se puede ver un ejemplo de una casa
inteligente donde se señalan algunas de las partes más importantes en la misma.

8
Ilustración 1Figura 2.1. Hogar domótico [3]
Como se puede observar en la figura anterior, de un hogar domótico se pueden
obtener beneficios varios como el cierre automático de persianas, el control del hogar desde
un computador, el riego automático de las plantas, y muchos otros.
2.2 Servicios y beneficios que se buscan con la domótica [1]
Básicamente los beneficios que busca cubrir un recinto domótico son: el confort, el
ocio y el entretenimiento, la seguridad, así como la climatización; el ahorro energético y en
ciertos casos, algunos servicios de interés comunitario.
9
2.2.1 Confort, ocio y entretenimiento
En esta parte se contempla tanto lo referente a la automatización de ciertos
elementos del hogar (como el encendido y apagado automático de algunas luces a ciertas
horas o en ciertas situaciones como cuando alguien pasa por un pasillo) con el fin de
disminuir al máximo posible las labores que se tengan que realizar en el hogar, así como la
implementación, el control y la intercomunicación de los diferentes equipos electrónicos
destinados al ocio (llámense televisión inteligente, consolas de videojuegos con
accesibilidad a internet, entre otros).
También se incluyen los sistemas de audio y video cerrado en toda la casa, la
creación de ambientes y escenarios varios (por ejemplo, un escenario de fiesta o de cine en
casa); los cuales pueden activarse con solo tocar un botón, una pantalla táctil, o
predeterminados para que ocurran a ciertas horas del día, o ante ciertas condiciones
climatológicas. Por ejemplo, actualmente se suelen incluir escenarios en los cuales, ante
condiciones de baja temperatura, se cierren las ventanas y las persianas del hogar, y se
encienda el sistema de calefacción, todo de manera automática. Todo lo anterior, además de
un sin número de aplicaciones destinadas al ocio y el entretenimiento, que son cada vez
mayores debido a la creciente tecnología del mercado actual, dependerán finalmente, de las
necesidades y exigencias del cliente.
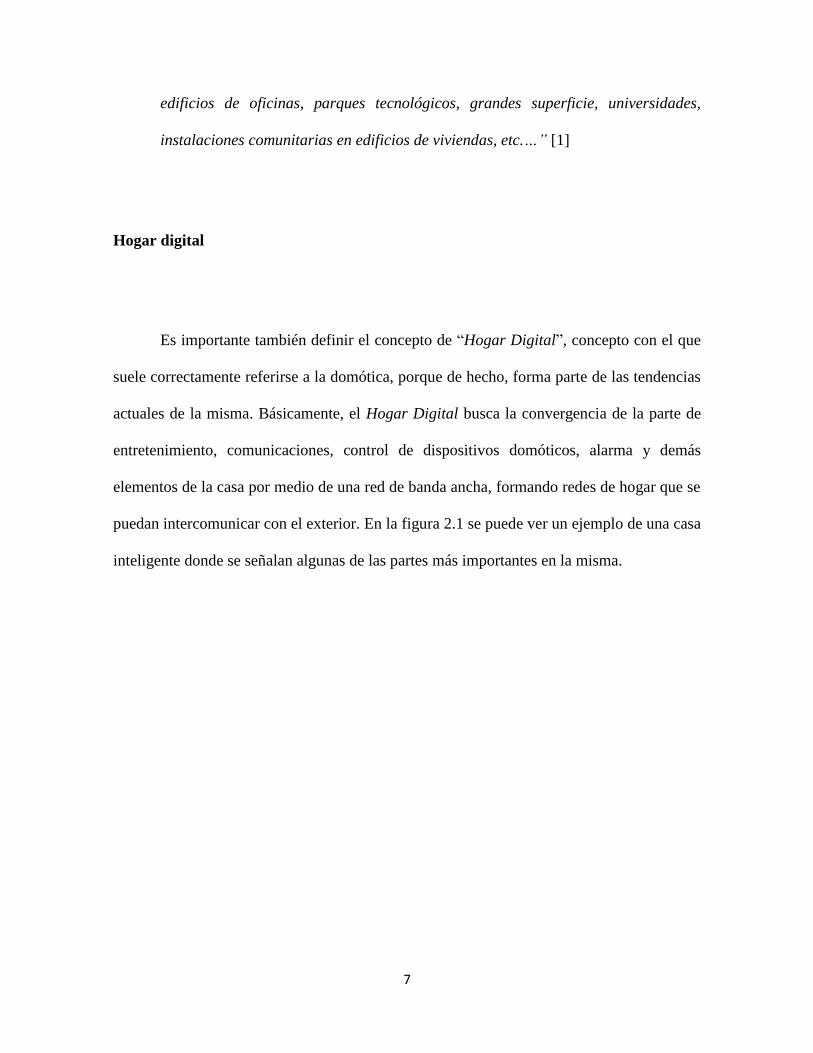
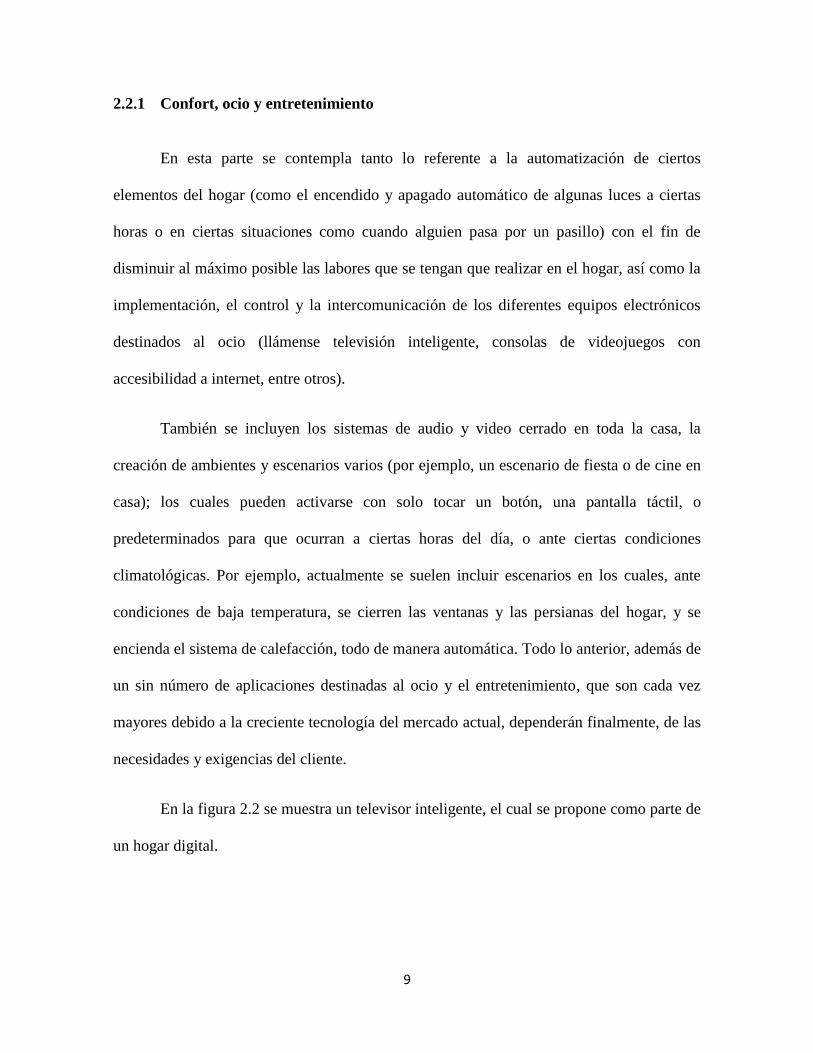
En la figura 2.2 se muestra un televisor inteligente, el cual se propone como parte de
un hogar digital.
10
Ilustración 2Figura 2.2. Televisor inteligente como parte de un sistema de ocio del hogar
domótico [4]
2.2.2 Seguridad
En lo que respecta a la seguridad, se incluyen las alarmas de aviso y prevención de
intrusión de personas no autorizadas. Las solicitudes de ingreso pueden hacer uso de
códigos de acceso o tarjetas magnéticamente programadas. La detección de intrusión puede
utilizar sensores de contacto magnético y de presencia que eventualmente activen la señal
de alarma y/o envíen una notificación al usuario vía telefónica o vía internet (esto como
parte de la conexión interna del hogar con un sistema externo de intercomunicación).
Sumado a esta parte de la seguridad del hogar domótico, se suelen colocar cámaras
IP o con otro tipo de protocolo para vigilar las proximidades de la casa y los interiores de la
misma. Actualmente, se han logrado integrar cámaras a los sistemas de intercomunicación
con el exterior, para que el usuario pueda, no solamente escuchar a la persona que llama
fuera de la casa, sino también verla; e inclusive, en caso de no estar en la casa, tomar
fotografías de dicha persona, para saber quienes le buscaron en su ausencia.
11
Como parte de la seguridad también se suelen implementar sistemas de las llamadas
alarmas técnicas. Estas alarmas incluyen sistemas de prevención contra incendios, contra
inundaciones, contra fuga de gas, entre otras situaciones riesgosas; las cuales incluyen tanto
los sensores para reconocer dicha situación, por ejemplo, humo en el caso de las alarmas
contra incendios (usualmente de tipo iónico o de tipo óptico), o humedad en el caso de la
alarmas contra inundaciones; así como de actuadores (concepto que se discutirá más
adelante) que se encarguen de activar una electroválvula que cierre el paso del gas, o que
abra el paso de una instalación de tuberías de agua provista para apagar el fuego en caso de
incendios.
2.2.3 Climatización y ahorro energético
Se suelen usar como dispositivos de climatización los sistemas de aires
acondicionados y de calefacción, los cuales son controlados por medios manuales como
pantallas táctiles o por métodos de control automático con sensores y actuadores para que
se mantenga el recinto a un valor de temperatura predeterminado. También se suelen poner
en varios puntos del hogar, indicadores de la temperatura de la zona en la que se encuentre,
para que el usuario sepa esta información.
En lo que respecta a la climatización en las casa inteligentes en Costa Rica, su
prioridad es secundaria, ya que la mayor parte del territorio nacional no presenta
condiciones de clima extremo, como sí las hay en otros países donde resulta de mayor
importancia los sistemas de climatización.
12
En cuanto al ahorro energético, se tiene que la cantidad de energía que se vaya a
ahorrar en una casa inteligente depende mucho de las exigencias del cliente. Sin embargo,
el simple hecho de que exista un sistema de automatización general (tema que se discutirá
más adelante), hace que los cables eléctricos utilizados para el control manual de las
luminarias y demás cargas de interés (por ejemplo, motores para persianas, para el garaje,
entre otros), pueda hacerse con cable de un menor calibre al usado en una instalación
convencional, además de que las corrientes que controlan estos elementos serían corrientes
mínimas correspondientes a señales electrónicas que serían destinadas a accionar los
actuadores (el cableado de potencia correspondiente a la alimentación de las cargas seguirá
siendo el mismo que en una instalación convencional).
Existen también dos tendencias domóticas que buscan la máxima armonía con el
medio ambiente, las Viviendas Bioclimáticas y las Viviendas Sostenibles. Las Viviendas
Bioclimáticas buscan la optimización del propio diseño arquitectónico y su integración con
el entorno ecológico que las rodea para lograr condiciones de confort climático con la
mínima intervención de sistemas eléctricos de calefacción o enfriamiento de interiores. La
automatización de mecanismos para abrir y cerrar ventanas, persianas y tragaluces
dependiendo de las condiciones climatológicas, juega un papel de suma importancia dentro
de estas viviendas. Las Viviendas Sostenibles son capaces de generar parte o incluso hasta
la totalidad de la energía eléctrica utilizadas por las misma, por medio de fuentes de energía
renovables como lo son los paneles solares (lo más común), energía biomasa, o pequeñas
torres eólicas.
Estas dos tendencias se pueden implementar en conjunto o como parte de un sistema
domótico de ahorro de energía. En la figura 2.3 se muestra un sistema de Vivienda

13
Bioclimática en donde se utilizan paneles solares para generar energía eléctrica, y ciertas
técnicas arquitectónicas de construcción para que el aire caliente del verano pueda salir de
la casa sin la necesidad del uso de aires acondicionados.
Ilustración 3Figura 2.3. Sistema de viviendo Bioclimática [5]
Otra técnica utilizada para ahorrar energía, es la utilización de iluminación de
mínimo consumo, como la tecnología tipo LED, tema que se explicará en el capítulo 5. En
la siguiente figura se muestra una lámpara hecha a base de tecnología LED, la cual es parte
de un sistema de ahorro energético

14
Ilustración 4Figura2. 4. Lámpara del tipo de iluminación LED [6]
2.2.4 Servicios comunitarios
Como parte de los beneficios que se logran integrar en las viviendas domóticas
actuales, especialmente cuando se trata de condominios de casas inteligentes, se
encuentran los servicios comunitarios. Estos incluyen controles de iluminación de zonas
comunes, el manejo de alarmas comunitarias (ya sean alarmas de intrusión o técnicas), así
como servicios de intercomunicación de datos entre las diferentes viviendas conectadas.
2.3 Partes de un sistema domótico [1] [2]
Un sistema domótico suele estar integrado por varios elementos, tales como
sensores, actuadores, unidades de mando o control, y pasarelas residenciales.

15
2.3.1 Sensores
Son dispositivos capaces de medir variables físicas o químicas provenientes de un
medio exterior (variables de instrumentación), como por ejemplo temperatura, de presencia,
humedad, intensidad lumínica, presión, movimiento e intensidad de sonido, y
transformarlas en variables eléctricas manipulables de alguna manera, ya sea resistencia
eléctrica, capacitancia eléctrica, tensión eléctrica, corriente eléctrica o inductancia eléctrica;
las cuales generalmente suelen ser interpretadas por un sistema de control, un dispositivo de
accionamiento o hacia un dispositivo de medición.
En lo que a domótica respecta, los sensores son dispositivos que se encargan de
darle cierto nivel de automatismo a la casa, de manera que se encargan de identificar una
señal y enviarle la información, a una unidad de control, o directamente a los dispositivos
responsables de accionar el elemento que controlan (esto último dependerá de la rapidez
con la que se necesite que actúe el sistema sensor-actuador).
Generalmente los sensores no se conectan a la red eléctrica sino que se les
incorporan pilas para que su funcionamiento no dependa de que no existan cortes de
corriente principal de la casa. Además, disponen de un encapsulado mediante el cual
consiguen un correcto funcionamiento al evitar que no le afecten condiciones externas
distintas de la magnitud a medir.
Algunos conceptos importantes relacionados con los sensores son:

16
a) Sensores de señales continuas: detectan y envían información de señales
que varían con el tiempo pudiendo tomar un número infinito de valores
(por ejemplo la señal de la temperatura). Ejemplos de estos sensores son
los de nivel de iluminación, de temperatura, de nivel de humedad, de
viento, entre otros. En la figura 2.5 se puede ver un gráfico de la de la
temperatura con respecto al tiempo, lo cual representa una señal continua.
Ilustración 5Figura 2.5. Señal continúa en el tiempo [7]
b) Sensores de señales discretas: detectan y envían información de señales
que varían con el tiempo tomando solo un número finito de valores (por
ejemplo, la señal de encendido o apagado de un pulsador). Normalmente
transmiten solo dos posibles estados, son los más baratos, sencillos y de
mayor fiabilidad. Ejemplos de estos sensores son los sensores magnéticos
de detección de apertura de puertas y ventanas, de rotura de cristales, los
de presencia infrarrojos, entre otros. En la figura 2.6 se muestra una señal
discreta donde se cuenta el número de personas (lo cual es un número
entero) con respecto a un determinado tiempo.
17
Ilustración 6Figura 2.6. Señal discreta en el tiempo [7]
c) Amplitud: diferencia entre los valores límites de la medición.
d) Calibración: proceso de comparar un patrón conocido de la variable
medida que se aplica, mientras se observa la señal de salida, buscando
que ambos sean iguales.
e) Error: diferencia entre valor medido y valor real de la señal de una
variable.
f) Exactitud: concordancia entre valor medido y valor real de la variable.
g) Factor de escala: proporción entre la salida y la variable medida.
h) Fiabilidad: probabilidad de que no ocurra error en la medición.

18
i) Precisión: dispersión de los valores de la variable medida.
j) Ruido: perturbación no deseada que modifica el valor en la medición.
k) Sensibilidad: factor de proporción de la relación entre la salida y el
cambio en la variable medida.
l) Zona de error: Banda de desviaciones que se esperan a la salida.
m) Sensor activo: son aquellos que deben ser alimentados eléctricamente a
los niveles apropiados (son los más habituales en recintos domóticos).
n) Sensor pasivo: son aquellos que no necesitan alimentación eléctrica.
Dentro de la gran variedad de sensores del mercado, algunos ejemplos que se
utilizan en el sector de la domótica son:
19
Termostato de ambiente
Es el encargado de medir la temperatura de la vivienda o del lugar en el cual es
colocado (ya que en el caso de casas muy grandes se colocan varios y se realiza un
promedio entre las temperaturas tomadas por cada uno para encontrar la temperatura
ambiente de la casa). Se trata de un sensor de señal continua, y su funcionalidad es la de
enviar la información acerca de la temperatura para que ésta pueda ser controlada de
manera programada. Por ejemplo, si se quiere que la temperatura ambiente de la casa sea de
25 C°, entonces ante cualquier cambio de temperatura que pueda existir en la casa, se le
envía esa información al dispositivo de control para que éste, a su vez, regule la
temperatura de la casa a través de el o los dispositivos de acondicionamiento térmico, ya
sean estos los aires acondicionados o el sistema de calefacción. También se suelen incluir
puntos de control manual para que sea el usuario quien decida y regule la temperatura del
aposento.
La ubicación idónea para la instalación de estos termostatos es en lugares abiertos,
lejos de posibles fuentes de ruido de temperatura como sería dispositivos que puedan
dispensar calor, como los refrigeradores, las cocinas, o las ventanas o puertas donde el
viento pueda inducir un error. También se recomienda que los mismos tampoco estén cerca
de las salidas de los aires acondicionados o el sistema de calefacción ya que la temperatura
en estos lugares es distinta a la temperatura ambiente de la casa. En la figura 2.7 se muestra
un termostato de ambiente comercial con pantalla, en la cual, se muestra la temperatura
actual que registra el mismo
20
Ilustración 7Figura 2.7. Termostato de Ambiente Comercial [8]
Detector de gas
Se trata de un tipo de sensor utilizado en especial en alarmas técnicas. Se utiliza
para la detección de posibles fugas de gas, con la intención de evitar posibles situaciones de
explosión o de intoxicación en los habitantes del recinto. Este tipo de sensores, al
identificar la existencia de un cierto gas en el ambiente, envían la señal discreta de que
existe presencia del mismo, normalmente de manera directa hacia el actuador, que en este
caso se podría tratar de una electroválvula que corta el paso del gas, generalmente colocada
al inicio del sistema de tuberías del gas para así cortar con el suministro principal de gas de
la casa de habitación.
Éste deberá ser instalado en posición vertical a una distancia no mayor de 1.5
metros de la caldera de gas o el gasodoméstico más utilizado (por ejemplo cocina, o sistema
de calefacción a base de gas natural), lejos de objetos que puedan ser potenciales
obstaculizadores de la detección. También el lugar en que se coloca este sensor depende del

21
tipo de gas que se vaya a utilizar en la casa, por ejemplo, el gas natural es menos denso que
el aire, por lo cual, si existiera presencia del mismo en el ambiente, tenderá a irse hacia
arriba; por lo que en este caso el sensor se deberá colocar en partes altas. Por otro lado, en
el caso del gas butano y el propano, se trata de gases más densos que el aire, por lo que
tenderán a irse hacia abajo en caso de fuga; así que los sensores deberán colocarse en partes
bajas. En la figura 2.8 se muestra un detector de gas natural comercial que incorpora un
dispositivo sonoro para avisar acerca de una detección de fuga.
Ilustración 8Figura2.8. Detector de gas natural [9]
Detectores de humo
Son utilizados para la detección de conatos de incendio. Existen de dos tipos, los
iónicos y los ópticos. Los de tipo iónico, que reaccionan ante los humos y gases tóxicos. Su
principio de funcionamiento es basado en su elemento principal, el cual está formado por
dos cámaras en las que el gas se hace conductivo por la presencia de partículas alfa
22
(núcleos de helio ionizados), las cuales se ven disminuidas cuando existen ciertos gases
como el humo en el ambiente; estos son los más comunes. Los ópticos, son más caros que
los anteriores. Basan su funcionamiento en señales infrarrojas, ya sea emisor-receptor en
distintos lugares cada uno, o encapsulados en un mismo dispositivo, que al detectar un
oscurecimiento en el ambiente, lo identifican como presencia de humo (se regulan para
distinguir el oscurecimiento del humo, de la presencia de una persona o de un objeto).
Este tipo de sensores se suelen colocar en el techo de las estancias, aunque no se
recomienda colocar en las cocinas por la presencia necesaria de humos en esta región.
Sonda de humedad
Se trata de un dispositivo destinado a detectar posibles escapes de agua, esto para
evitar inundaciones que puedan dañar parte de la casa o a los elementos que forman parte
del mobiliario. Se conectan de contacto con el piso y en zonas donde se pueda presentar
esta situación, como en los baños o tocadores, en la cocina, el patio de pilas, entre otros.
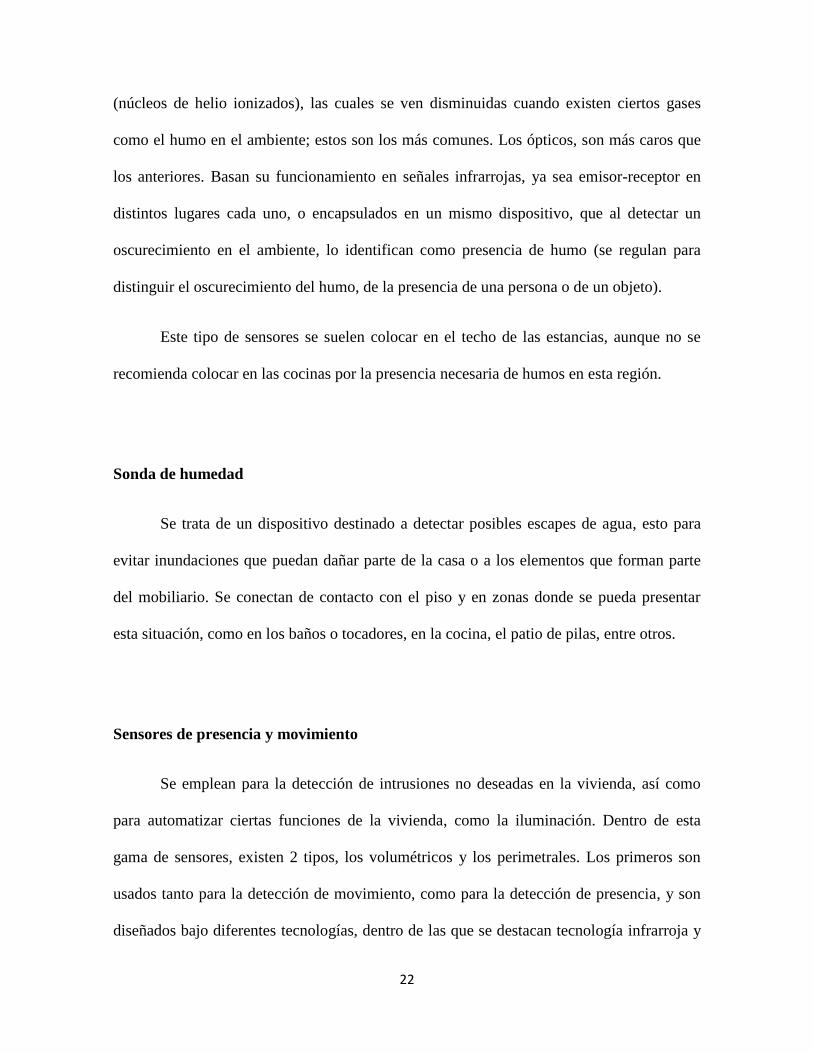
Sensores de presencia y movimiento
Se emplean para la detección de intrusiones no deseadas en la vivienda, así como
para automatizar ciertas funciones de la vivienda, como la iluminación. Dentro de esta
gama de sensores, existen 2 tipos, los volumétricos y los perimetrales. Los primeros son
usados tanto para la detección de movimiento, como para la detección de presencia, y son
diseñados bajo diferentes tecnologías, dentro de las que se destacan tecnología infrarroja y

23
tecnología ultrasónica. La técnica para la detección mediante tecnología infrarroja es la de
enviar un haz de luz de frecuencia infrarroja para que, al chocar con un cuerpo envíe de
vuelta la información de la temperatura del mismo y si existen cambios instantáneos en la
temperatura de dicho cuerpo, se asume que existió movimiento. En la tecnología
ultrasónica, se envía una onda de frecuencia ultrasónica indetectable para el ser humano,
que al chocar con ciertos cuerpos, cambia su frecuencia, con lo cual se detecta el
movimiento. Este tipo de sensores suelen colocarse en esquinas de las paredes del recinto
de manera que pueda sacarse el máximo provecho del volumen de área que pueden abarcar,
el cual es, en la mayoría de los casos de tipo cónico, o sea, que entre más lejos
horizontalmente del sensor se esté, se tiene mayor área de detección (esto dentro de los
rangos de distancia horizontal de detección, especificada en las características técnicas del
sensor).
Los sensores perimetrales, generalmente están compuestos por dos partes
mecánicas, una móvil y una fija, las cuales al estar en contacto o al dejar de estarlo, generan
una señal. Suelen ponerse en lugares como en las ventanas o en las puertas de la casa, de
manera que el contacto móvil se coloque sobre la superficie que se va a abrir, mientras que
el contacto fijo se ponga sobre ya sea el marco de la puerta o de la ventana para que sea éste
quien envíe la señal hacia el sistema de control o hacia la alarma. Su principio de
funcionamiento generalmente es de tipo magnético, de manera que generalmente el
elemento móvil crea un campo magnético, ya sea de atracción o de repulsión sobre el
contacto fijo, en el cual, debido al efecto del campo, se abre o se cierra un circuito. En la
actualidad, en busca de integrar estos dispositivos de manera estética a un hogar domótico,
se suelen añadir internamente en las estructuras en las que se les quiera colocar, por
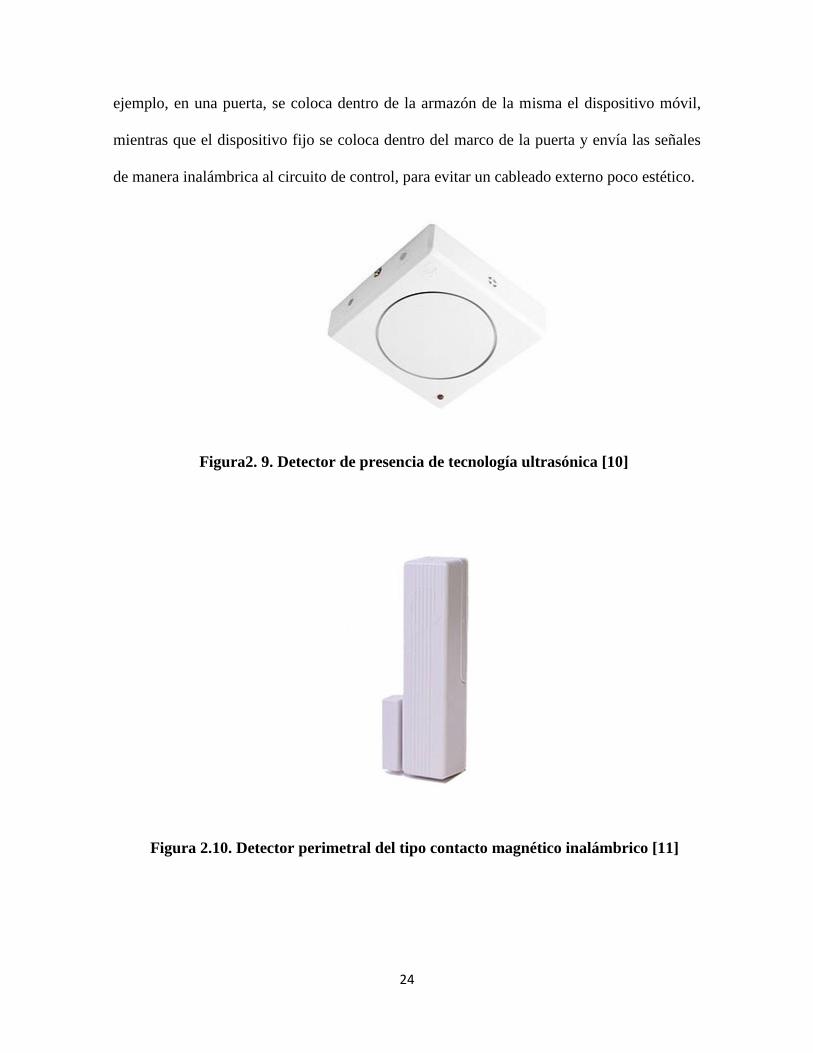
24
ejemplo, en una puerta, se coloca dentro de la armazón de la misma el dispositivo móvil,
mientras que el dispositivo fijo se coloca dentro del marco de la puerta y envía las señales
de manera inalámbrica al circuito de control, para evitar un cableado externo poco estético.
Ilustración 9Figura2. 9. Detector de presencia de tecnología ultrasónica [10]
Ilustración 10Figura 2.10. Detector perimetral del tipo contacto magnético inalámbrico [11]
25
2.3.2 Actuadores
Estos son los elementos que utiliza el sistema de control para modificar el estado de
ciertas cargas, equipos o instalaciones. Normalmente se utilizan contactores o relés de
actuación (del tipo de carril DIN, o los de base de enchufe), electroválvulas para cerrar o
abrir el paso de agua o de gas, y sirenas o zumbadores para el aviso de intrusión o de
disparo de alguna alarma técnica.
La forma en la que normalmente interactúan éstos con la instalación domótica es
que al detectarse algo por medio de los sensores, o al enviarse una señal de activación
manual por medio de algún interruptor, la señal pasa por el sistema de control, y éste
último, le envía una señal a los actuadores, los cuales suelen tener un circuito electrónico de
baja tensión (usualmente entre 12V y 24V) para la activación de un circuito de mayor
potencia, con el que se interrumpe o se regula la tensión de corriente alterna que va hacia
las cargas finales que se desean controlar. Éste hecho en sí, supone un ahorro energético,
debido a que el manejo de la activación de las carga a cargo de los actuadores, se da con
corrientes muy bajas.
En la actualidad, existe una gran cantidad de circuitos que funcionan como
actuadores dentro del recinto domótico. La mayoría de los mismos, suelen tener elementos
básicos como relés, los reguladores de nivel de tensión y electroválvulas.

26
Relé
Interruptor que permite conmutar circuitos de potencia más elevada mediante una
señal de baja potencia. Se pueden dividir en dos tipos: los relés electromecánicos y los relés
de estado sólido.
Los primeros basan su principio de funcionamiento en un solenoide que al ser
excitado con una corriente mínima, crea un campo magnético que logra atraer un contacto
mecánico, de manera que éste pueda abrir o cerrar circuito de potencia. Existen módulos
especiales que traen varios relés con diferentes capacidades de niveles de corriente y
tensión que pueden controlar en el circuito de potencia, los cuales son muy usados para
algunas aplicaciones de domótica. Cabe destacar que la terminología “Contactor” se le
adjudica a los relés electromecánicos de potencia, que generalmente, sí necesitan de
alimentación propia.
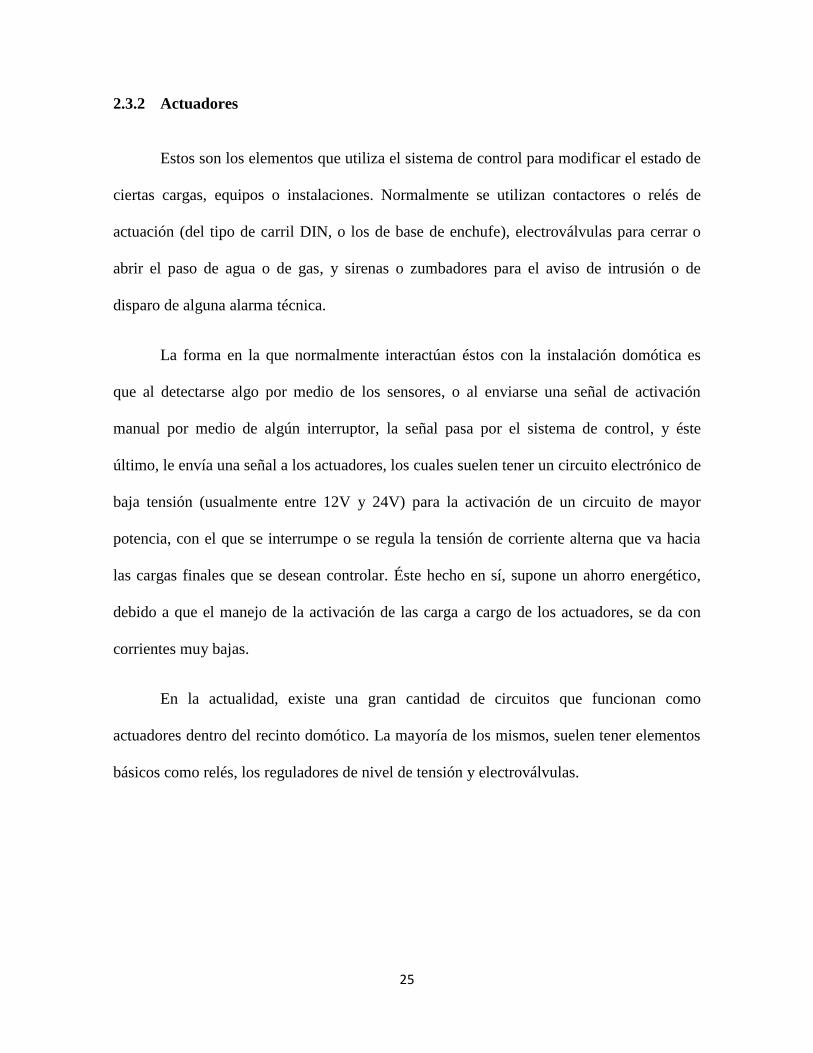
Los relés de estado sólido (SSR) son dispositivos que realizan la misma función que
un relé electromecánico, pero bajo un principio de funcionamiento totalmente distinto.
Presentan en su interior un circuito electrónico generalmente basado en TRIAC y Opto
acopladores, de manera que la señal de control entra al Opto acoplador, el cual, activa la
compuerta del TRIAC, y éste último, permite el paso de corriente entre sus terminales de
ánodo y cátodo, generando así, una conmutación electrónica de potencia. En la figura 2.11
se muestra un relé de estado sólido comercial con 4 terminales, de las cuales, 2
corresponden a las entradas de baja potencia y las otras 2, a las salidas para el circuito de
mayor potencia.
27
Ilustración 11Figura 2.11. Relé de estado sólido utilizado en sistemas domóticos [12]
Reguladores de nivel de tensión
Dispositivos que se basan en circuitos o componentes electrónicos de potencia,
como los TRIAC y los DIAC, usados para regular el nivel de potencia que entregan o que
dejan pasar sobre una carga dada. Es importante recalcar el hecho de que para la instalación
de estos dispositivos, es necesario saber qué tipo de carga están controlando, si es una
luminaria, saber si es del tipo fluorescente o incandescente, o de tipo LED, ya que las
mismas tienen diferentes principios de funcionamientos, por lo que sus corrientes y
comportamiento sobre la red eléctrica de la casa, suelen ser distintos.
Electroválvulas
Son elementos que cortan o abren el paso de una tubería específica, utilizando para
su apertura o cierre, una señal eléctrica externa, la cual, excita una bobina que atrae
magnéticamente al dispositivo mecánico de cierre. Están formadas por el cuerpo que se
28
ajusta a la tubería, y por el cabezal, encargado de mover el dispositivo de cierre. En la
figura 2.12 se puede apreciar una electroválvula comercial.
Ilustración 12Figura 2.12. Electroválvula [13]
2.3.3 Unidad(es) de control
Es común para muchos sistemas domóticos, que se suela tener unidad de control
central, sin embargo existen algunas otras, en la que se colocan varios controladores
intercomunicados entre ellos de manera distribuida o descentralizada, para que los mismos
se encarguen del control del estado de las cargas.
Básicamente, el sistema de control es el elemento encargado de recoger la
información que le envían los diferentes sensores y los puntos de control manual del
usuario (llámense éstos los interruptores, pulsadores, botones, pantallas táctiles, etc.),

29
distribuidos en los distintos puntos de control de la vivienda, capaz de procesar esta
información y además, generar órdenes en forma de señales hacia los actuadores para que
estos ejecuten la acción. De la integración de los demás dispositivos a éste es que depende
la complejidad del sistema domótico.
En general, se trata de un microcontrolador que puede ser programado bajo un
cierto lenguaje para que realice funciones bajo ciertas condiciones, esto desde el punto de
vista del fabricante. Sin embargo, este elemento de la instalación domótica debe también
presentar una interfaz amigable con el usuario, que no sea complicada de usar y que el
mismo pueda programar con métodos gráficos sus preferencias en el hogar de una manera
sencilla; de hecho éste es un tema que suele ser, por increíble que sea, uno de los problemas
actuales de la domótica, que muchas personas la catalogan como tecnología difícil de
utilizar e innecesaria.
En esto de la interfaz, se suelen utilizar pantallas táctiles o con acceso a teclados
destinados a la comunicación entre el usuario y la casa, y las nuevas tendencias en
interfaces incluyen cada vez más, software que pueden ser manipulados vía internet, en
cualquier computador, desde cualquier parte del mundo, por medio de una página de
internet que solicite una contraseña de acceso, que solo tenga el usuario. En esta área, es
muy importante poner fuertes sistemas de “firewalls” para la protección contra posibles
“hackers” que pudieran, eventualmente, ingresar a sistema de control de la vivienda
domótica.
30
Actualmente, también se suele integrar cada vez más el uso de dispositivos móviles
con sistema operativo, como lo son los celulares inteligentes y las “Tablets”, para que,
haciendo uso de un “software” especial para el mismo, se creen interfaces gráficas que
controlen también el sistema domótico de manera inalámbrica (por ejemplo, con
“Bluetooth”).
Es también importante mencionar el hecho de que el sistema de control suele estar
intercomunicado con los elementos sensores y actuadores, así como todos los demás
elementos del sistema domótico, todo por medio de una red interna de la casa inteligente,
en la cual se puedan utilizar ciertos protocolos de intercomunicación, los cuales serán
discutidos más adelante.
A continuación se muestra una imagen de una unidad de control comercial utilizada
para sistemas domóticos.
Ilustración 13Figura 2.13. Dispositivo de control domótico [14]

31
2.3.4 La pasarela residencial
También llamada “Gateway” al ser éste su nombre original en inglés. Es el
dispositivo que sirve de frontera entre las redes de intercomunicación externas y las redes
internas de la vivienda. Esta debe ser una interfaz flexible, normalizada e inteligente, que
pueda recibir señales del exterior y transferirlas de manera clara y transparente a los
diferentes elementos de la red interna de la casa, y viceversa.
Este es el elemento que hace que se pueda interactuar de manera directa con los
elementos de la casa, ya sea para ver el estado de los mismos, o para poder manipular el
estado de alguno, por medio del software desde una computadora, desde cualquier parte del
mundo.
También es el encargado de poder hacer que ciertos dispositivos electrónicos
inteligentes, como televisores, consolas de videojuegos y equipos de sonido, puedan
interactuar entre sí y con el exterior, mediando entre distintos protocolos de distintas
marcas. La pasarela residencial se convierte así, cada vez más dentro del hogar domótico
actual, en un elemento fundamental, debido en especial a la proliferación de dispositivos
electrónicos inteligentes que se puedan agregar a la vivienda automatizada.
Al estar en contacto con las redes internas como con las redes externas del hogar
inteligente, es importante que la pasarela cuente con fuertes sistemas de protección para
garantizar la privacidad y accesos seguros.
32
En algunos casos de viviendas domóticas de fabricación casera, se utiliza un
“router” con la finalidad de ejercer ciertas funciones de la pasarela, solo que, en estos
casos, no se contaría con los beneficios de la normalización entre distintos protocolos.
En la figura 2.14 se puede ver un dispositivo comercial utilizado como Gateway en
un sistema domótico.
Ilustración 14Figura 2.14. Dispositivo central de una pasarela residencial [15]
33
2.4 Redes Domóticas [1] [2]
Existen tres tipos de redes internas en un hogar domótico: red de datos, red
multimedia y red de control. Debido a que el presente trabajo se enfoca en la
automatización de la vivienda, se profundizará un poco más en la red de control ya que ésta
es la que controla los dispositivos varios de la vivienda domótica.
Tanto las tres redes como el circuito de control convergen en la pasarela residencial,
donde se pueden importar y exportar datos hacia el exterior, donde un posible sistema
operativo controlado desde algún medio exterior, pueda controlar el flujo de información de
naturaleza de datos, multimedia o de control (por ejemplo para poder encender y apagar
dispositivos desde el exterior de la casa) dentro del hogar.
2.4.1 Red de datos [1]
Se utiliza para interconectar entre computadoras, impresoras, escáneres y demás
dispositivos periféricos a las computadoras. Se suele utilizar el protocolo TCP/IP, el cual es
muy similar al modelo OSI con la modificación de que solo tiene una capa superior
(aplicaciones) y que en la capa de red, el protocolo IP (protocolo de internet) es el usado, y
que se suelen unir los primeros dos niveles inferiores en uno solo. Permite compartir
recursos informáticos, así como acceder a Internet desde todas las dependencias de la
vivienda simultáneamente, al mismo tiempo que se puede hablar por teléfono.
Dentro de las tecnologías que compiten actualmente en esta red de datos para el
hogar domótico se encuentran la LAN (red de área local, como por ejemplo el Ethernet), la

34
WLAN (red de área local inalámbrica, como por ejemplo el Wi-Fi), la PAN (red de área
personal, por ejemplo USB) y WPAN (red de área personal inalámbrica, por ejemplo
Bluetooth). Cada una de estas tecnologías manejan protocolos diferentes que pueden ser
aplicados a diferentes usos, por ejemplo, para conectar una impresora a la red es preferible
utilizar USB, mientras que para poder conectar una computadora portátil es preferible tener
Wi-Fi, el cual, actualmente se apodera que cada vez más del mercado del internet
residencial por su versatilidad, la facilidad que presenta al permitir al usuario conectarse en
cualquier parte de la casa, y por la manera en que se ha ido eliminando los peros que se
tenían anteriormente relacionados a la velocidad y al alcance del mismo.
Es importante indicar que esta red no es indispensable para poder hablar de un
hogar inteligente o automatizado, sin embargo, las tendencias actuales cada vez la incluyen
más y más debido a la proliferación de los equipos varios de cómputo en el hogar.
2.4.2 Red Multimedia [1]
Es una red realmente muy similar a la red de datos, con la diferencia de que está
orientada a la comunicación entre dispositivos de entretenimiento (de hecho, en algunos
hogares domóticos se suelen integrar en una sola llamada la red datos-multimedia). En
general, se utiliza para la interconexión de televisores, equipo de sonido, reproductores de
DVD, Mp3, entre otros.
Básicamente, permite la gestión y distribución de audio y video por toda la
vivienda. Maneja protocolos de compresión de datos, de interconectividad de dispositivos,

35
entre otros, mientras que los protocolos para el envío de los datos son basados en el modelo
OSI.
Actualmente, una tendencia en domótica dentro de estas redes de multimedia, es
incluir cámaras que funcionan con protocolo IP para poder supervisar eventos que se
puedan dar dentro y fuera de la casa de manera remota, como parte de un sistema de
seguridad.
Al igual que las redes de datos, las de multimedia dentro de la domótica son un
concepto no necesariamente indispensable en un hogar domótico, más bien, son un
concepto relativamente nuevo que viene a depender de dispositivos electrónicos
inteligentes que se puedan integrar dentro de una red para compartir datos de audio y video.
2.4.3 Red de Control [1] [2] [16]
Esta red es la más importante en un hogar domótico, ya que se encarga del control
de los dispositivos varios incluidos en la casa inteligente. Es la red en la cual interactúan
sensores, interruptores, dispositivos de control manual, controlador y actuadores. Las
tendencias actuales integran también a ciertos electrodomésticos dentro de esta red, los
cuales se denominan electrodomésticos inteligentes.
Como característica importante se tiene que, en esta red no existen fuertes
requerimientos de ancho de banda para su funcionamiento, ya que estos dispositivos
únicamente se intercambian comandos y, además, no lo realizan de manera continua.
36
Los medios físicos de transporte suelen ser par trenzado, cable coaxial, fibra óptica,
red eléctrica, infrarrojos, radiofrecuencia, etc. dependiendo éstos del protocolo de control
que se pretenda utilizar.
2.4.3.1 Topologías usadas en Redes de Control
Existen diversas topologías dentro de las redes de control, a continuación se
mencionarán algunas de las más usadas.
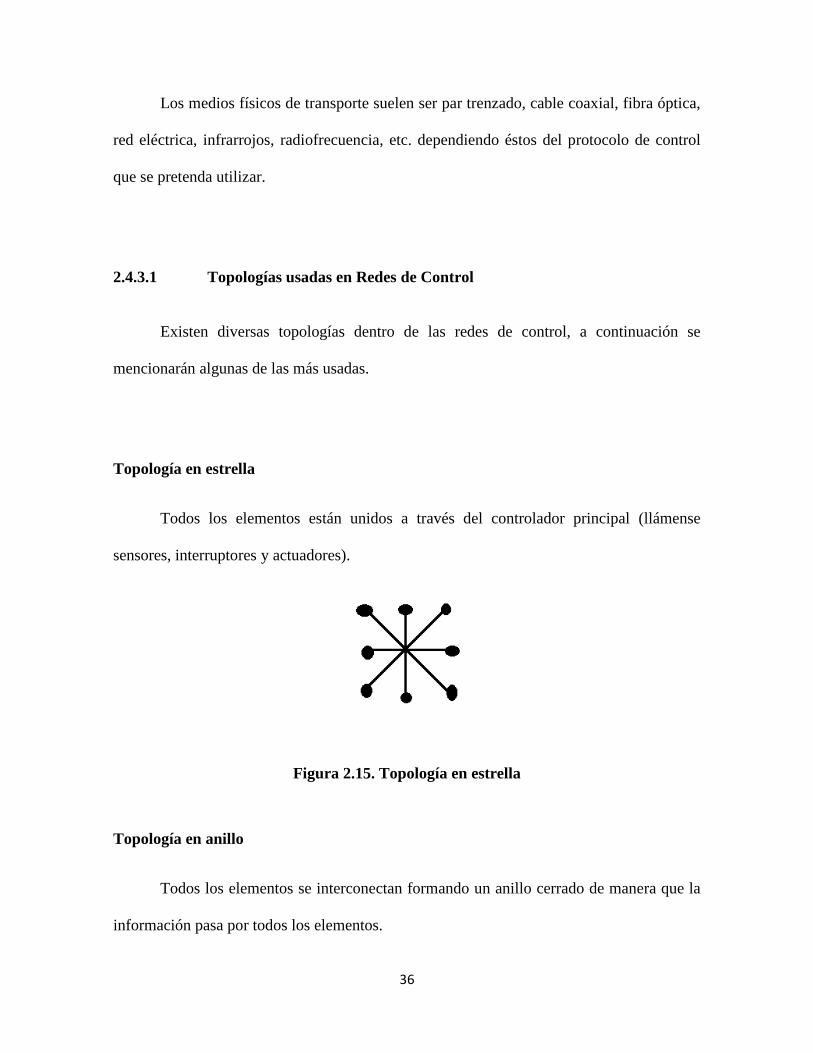
Topología en estrella
Todos los elementos están unidos a través del controlador principal (llámense
sensores, interruptores y actuadores).
Ilustración 15Figura 2.15. Topología en estrella
Figura 2.15. Topología en estrella
Topología en anillo
Todos los elementos se interconectan formando un anillo cerrado de manera que la
información pasa por todos los elementos.

37
Ilustración 16Figura 2.16. Topología en anillo
Figura 2.16. Topología en anillo
Topología en bus
En esta topología todos los elementos (sensores, interruptores, actuadores)
comparten la misma línea o bus de comunicación. A cada elemento se le da una dirección y
el mismo responde cuando se le manda información por medio del bus. Requiere que cada
elemento tenga su circuito de identificación de dirección como mínimo.
Ilustración 17Figura 2.17. Topología en bus
Figura 2.17. Topología en bus
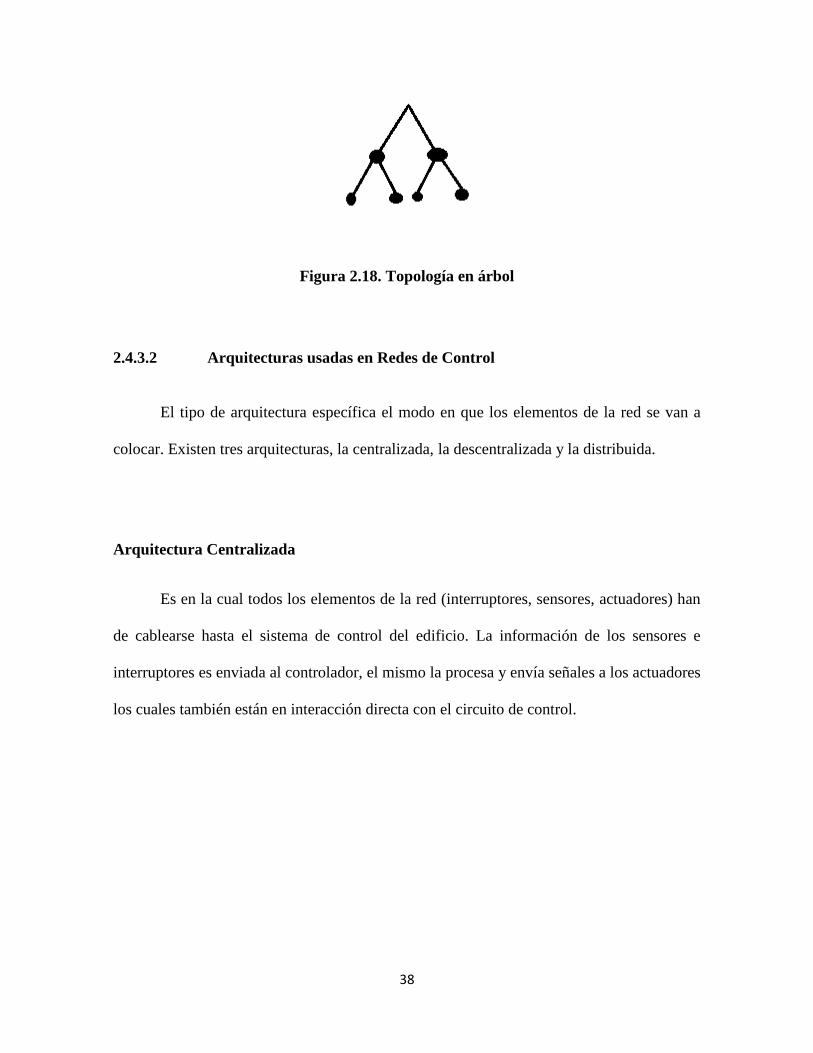
Topología en árbol
Se trata de una mezcla de la topología estrella y del bus, de manera que se puede
establecer una jerarquía de elementos en la red.
38
Ilustración 18Figura 2.18. Topología en árbol
Figura 2.18. Topología en árbol
2.4.3.2 Arquitecturas usadas en Redes de Control
El tipo de arquitectura específica el modo en que los elementos de la red se van a
colocar. Existen tres arquitecturas, la centralizada, la descentralizada y la distribuida.
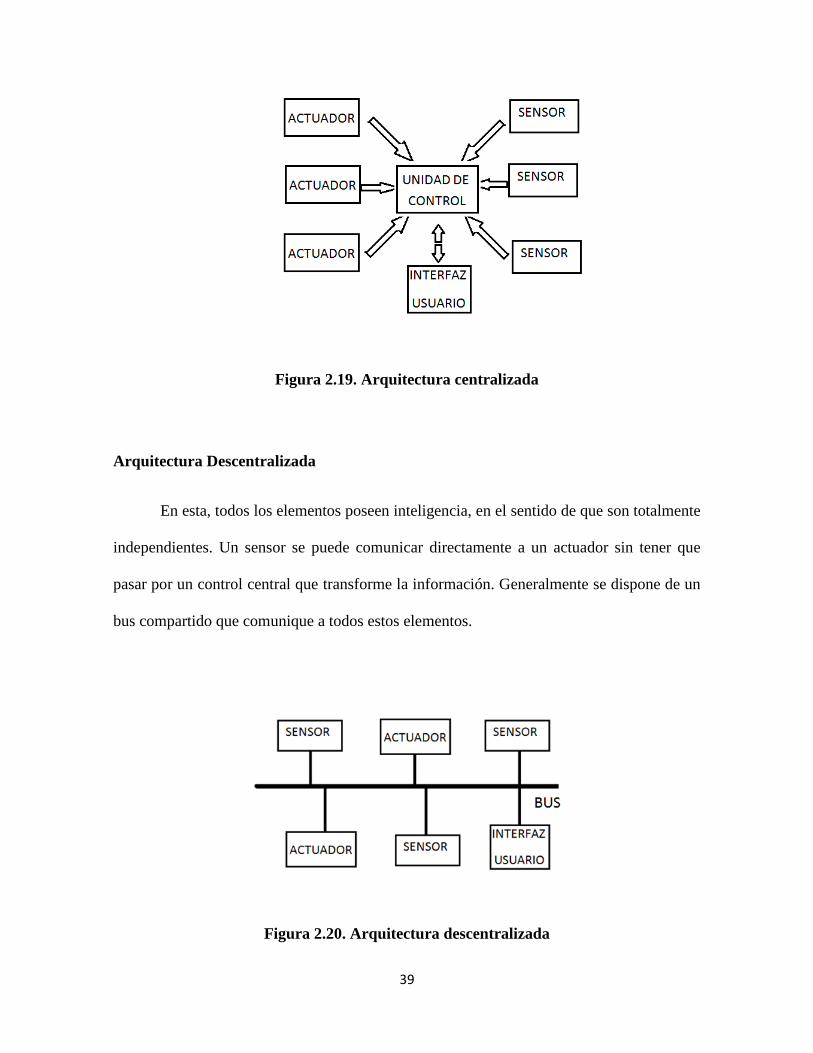
Arquitectura Centralizada
Es en la cual todos los elementos de la red (interruptores, sensores, actuadores) han
de cablearse hasta el sistema de control del edificio. La información de los sensores e
interruptores es enviada al controlador, el mismo la procesa y envía señales a los actuadores
los cuales también están en interacción directa con el circuito de control.
39
Ilustración 19Figura 2.19. Arquitectura centralizada
Figura 2.19. Arquitectura centralizada
Arquitectura Descentralizada
En esta, todos los elementos poseen inteligencia, en el sentido de que son totalmente
independientes. Un sensor se puede comunicar directamente a un actuador sin tener que
pasar por un control central que transforme la información. Generalmente se dispone de un
bus compartido que comunique a todos estos elementos.
Ilustración 20Figura 2.20. Arquitectura descentralizada
Figura 2.20. Arquitectura descentralizada
40
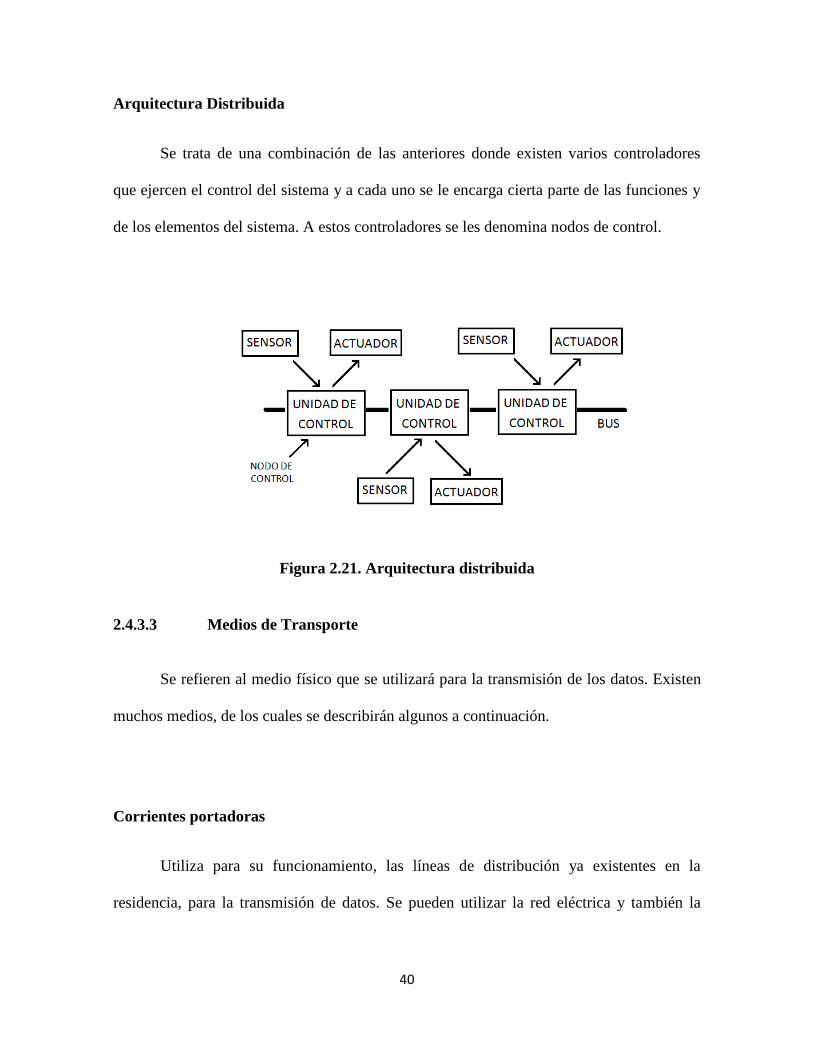
Arquitectura Distribuida
Se trata de una combinación de las anteriores donde existen varios controladores
que ejercen el control del sistema y a cada uno se le encarga cierta parte de las funciones y
de los elementos del sistema. A estos controladores se les denomina nodos de control.
Ilustración 21Figura 2.21. Arquitectura distribuida
Figura 2.21. Arquitectura distribuida
I
2.4.3.3 Medios de Transporte
Se refieren al medio físico que se utilizará para la transmisión de los datos. Existen
muchos medios, de los cuales se describirán algunos a continuación.
Corrientes portadoras
Utiliza para su funcionamiento, las líneas de distribución ya existentes en la
residencia, para la transmisión de datos. Se pueden utilizar la red eléctrica y también la

41
línea telefónica tradicional. Debido a que utiliza una instalación ya implementada, se
convierte en el método idóneo para residencias con instalación eléctrica existente.
Soportes metálicos
Se trata de utilizar cables metálicos de cobre como soporte para la transmisión de
las señales eléctricas que procesa. Existen diversos soportes metálicos, sin embargo, los
más utilizados son el par trenzado y el cable coaxial.
Fibra óptica
La fibra óptica es un medio de transmisión de datos de alta velocidad. Utiliza un
material dieléctrico conductor de luz, compuesto por un núcleo con un índice de refracción
menor que el del revestimiento que envuelve dicho núcleo. Estos dos elementos forman una
guía para la luz (los datos se envían en pulsos de luz en vez de ser pulsos de corriente). Se
suele transportar la información por medio de luz infrarroja, puesto que la transmisión
guiada en el rango de frecuencias de infrarrojo tiene menores pérdidas por atenuación.
Conexiones sin hilos
También llamadas conexiones inalámbricas. De tienen 2 tecnologías principales
dentro de estas redes: radiofrecuencias e infrarrojo. Los datos son enviados en un canal no
42
guiado (el medio ambiente) utilizando frecuencias de onda no visibles ni audibles para el
ser humano.
2.4.3.4 Protocolos de comunicaciones
Cuando se habla de protocolos de comunicaciones se habla del idioma o formato
con el que se van a manejar los datos de control de los diferentes elementos del sistema.
Existen protocolos estándar que básicamente son publicados y abiertos a terceras
personas para su manipulación e implementación. También existen protocolos propietarios,
que son protocolos creados por una empresa o entidad, y solo pueden comunicarse con
productos de su misma empresa. Desde el surgimiento del protocolo X-10 en 1975, han
aparecido en el mercado una gran cantidad de protocolos tanto estándar como propietarios,
evolucionando desde sistemas que tan solo podían permitir el control remoto de algunos
dispositivos domésticos, hasta sistemas que permiten crear ambientes complejos de
interacción entre los diversos elementos del hogar y poder ejercer control de los mismos
por medio de internet.
A continuación se describirán algunas funciones básicas de dos protocolos estándar
y uno propietario.
Protocolo X-10
Es el protocolo estándar más viejo en lo que a redes de control se trata,
presentándose en el mercado en el año 1975 como una opción para ejercer control remoto
43
hacia algunas cargas. Utiliza el concepto de las corrientes portadoras para controlar los
diferentes dispositivos, haciendo uso de una arquitectura descentralizada y a la vez
distribuida, de manera que por medio de dispositivos de control X-10 (módulos carril DIN,
módulos de pared para luces, módulos de enchufe para aparatos, entre otros) se envía la
información de control por medio de la red eléctrica, mientras por la misma se transmite la
energía hacia las cargas.
Es un sistema flexible, de ancho de banda reducido, reconfigurable, de instalación
sencilla y fácil manejo y permite controlar hasta 256 dispositivos dentro de una misma
instalación.
Protocolo EIB
Llamado también Bus de instalación Europeo (de sus siglas en ingles “European
Installation Bus”) se trata de un protocolo estándar que utiliza la topología de tipo bus para
la interconexión de los elementos de la red.
Dentro de las características del bus usado en este protocolo, se tiene que, el mismo
suministra la alimentación a los componentes del sistema con una tensión adecuada para su
funcionamiento, y que a su vez, a través de él se transmite el telegrama codificado para la
comunicación entre los componentes. Además, este sistema puede llegar a tener más de
1000 componentes todos conectados al mismo bus, de manera que la automatización de la
instalación, como se muestra en la figura 2.22, se suele dividir en áreas, las cuales se puede
dividir en líneas, que pueden controlar varios dispositivos a la vez. La situación de los
componentes dentro de la instalación está determinada por lo que se conoce como dirección

44
física, la cual consta de 3 números que representan el número de zona, el de línea y el del
componente dentro de la línea.
Ilustración 22Figura 2.22. Dirección física elementos EIB
Figura 2.22. Dirección física elementos EIB
Como medio de transporte de datos se utilizan cables conductores de cobre, los
cuales forman el bus, que suele ser del tipo manguera, que tiene una cubierta exterior de
plástico seguida de un apantallamiento metálico (para cancelar interferencias de la red
eléctrica) y luego uno plástico seguido de los conductores de cobre tipo bus.
Es importante destacar que cada componente del sistema EIB debe ser programable
individualmente, ya que se trata de un sistema descentralizado. Así que cada componente
integra un microprocesador, una memoria EEPROM, una RAM y una ROM. El conjunto de
estos 4 componentes se le llama “Acoplador al Bus”.
45
Protocolo SimónVIS
Se trata de un protocolo propietario desarrollado por Simon S.A. Dentro de sus
características se tiene que es un sistema que utiliza una arquitectura centralizada y
topología de tipo estrella, de manera que todos los elementos del sistema convergen en un
circuito de control general.
El control se maneja por medio de módulos, de manera que se tiene uno o varios
módulos de alimentación (dependiendo de la extensión de la instalación así será la cantidad
de módulos de alimentación que se requieran), un módulo de control central (que
básicamente se trata de un Controlador Lógico Programable o PLC), uno o varios módulos
de entradas y uno o varios módulos de salidas.
En este sistema, los actuadores son absorbidos dentro de las funciones que realizan
los módulos de salidas mientras que en los módulos de entradas se llevan a cabo las
funciones de convertir las señales de cada sensor e interruptor del sistema de manera que
sean codificadas según su ubicación dentro de la red.
46
CAPÍTULO 3. Evolución cronológica de los sistemas domóticos
El presente capítulo sintetiza los eventos más importantes relacionados con la
domótica de manera que se pueda apreciar cómo la misma ha ido evolucionando con el
tiempo. Se dividen estos eventos en dos períodos: el período de la “evolución pre-
domótica” y el período de la “evolución domótica”.
3.1 Evolución Pre-domótica [17] [18] [19] [20] [21] [22] [23]
Antes de que surgiera el concepto de domótica hubo una serie de acontecimientos
que ocurrieron y que fueron importantes para que esto pasara. Las figuras 3.1 y 3.2 ilustran
una línea del tiempo con eventos importantes que ocurrieron previamente a la aparición de
los protocolos domóticos.
47
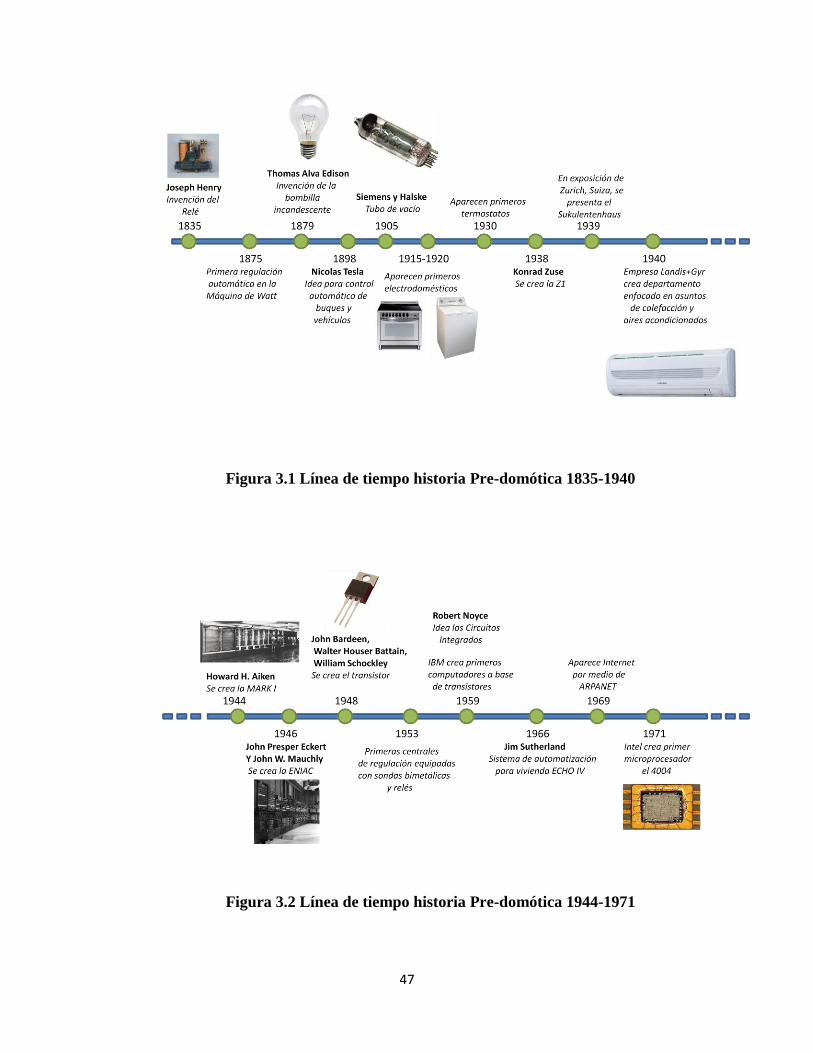
Ilustración 23Figura 3.1 Línea de tiempo historia Pre-domótica 1835-1940
Figura 3.1 Línea de tiempo historia Pre-domótica 1835-1940
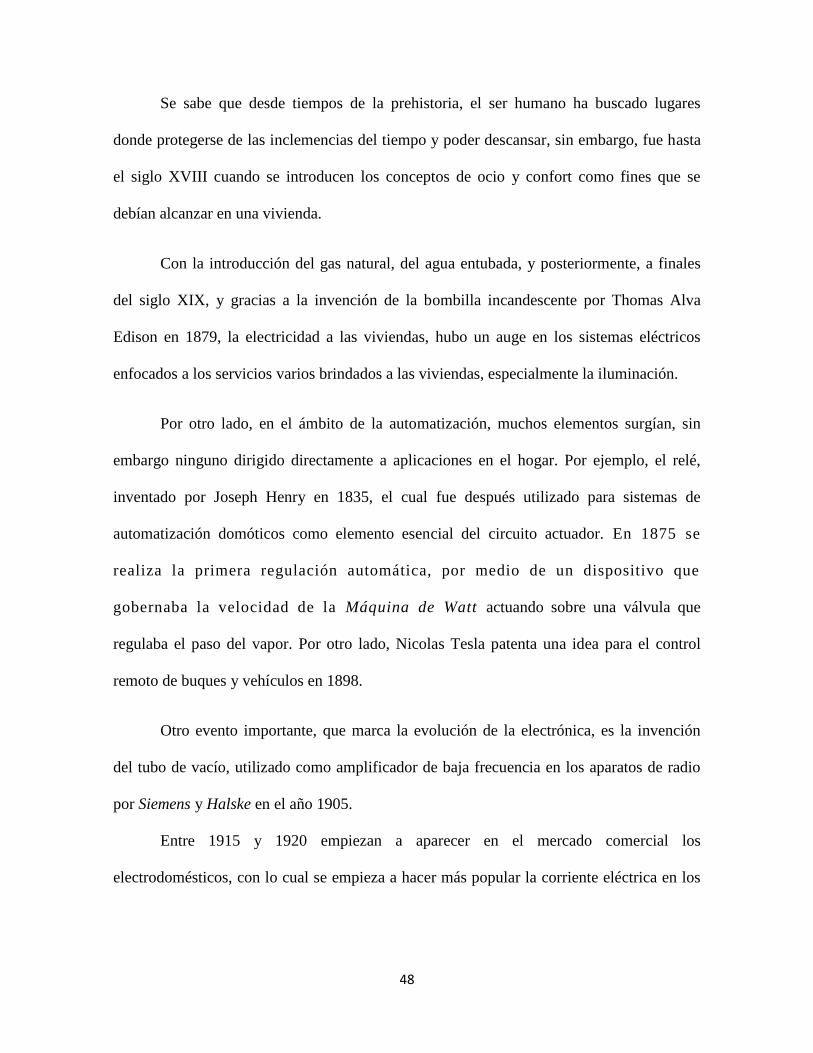
Ilustración 24Figura 3.2 Línea de tiempo historia Pre-domótica 1944-1971
Figura 3.2 Línea de tiempo historia Pre-domótica 1944-1971
48
Se sabe que desde tiempos de la prehistoria, el ser humano ha buscado lugares
donde protegerse de las inclemencias del tiempo y poder descansar, sin embargo, fue hasta
el siglo XVIII cuando se introducen los conceptos de ocio y confort como fines que se
debían alcanzar en una vivienda.
Con la introducción del gas natural, del agua entubada, y posteriormente, a finales
del siglo XIX, y gracias a la invención de la bombilla incandescente por Thomas Alva
Edison en 1879, la electricidad a las viviendas, hubo un auge en los sistemas eléctricos
enfocados a los servicios varios brindados a las viviendas, especialmente la iluminación.
Por otro lado, en el ámbito de la automatización, muchos elementos surgían, sin
embargo ninguno dirigido directamente a aplicaciones en el hogar. Por ejemplo, el relé,
inventado por Joseph Henry en 1835, el cual fue después utilizado para sistemas de
automatización domóticos como elemento esencial del circuito actuador. En 1875 se
realiza la primera regulación automática, por medio de un dispositivo que
gobernaba la velocidad de la Máquina de Watt actuando sobre una válvula que
regulaba el paso del vapor. Por otro lado, Nicolas Tesla patenta una idea para el control
remoto de buques y vehículos en 1898.
Otro evento importante, que marca la evolución de la electrónica, es la invención
del tubo de vacío, utilizado como amplificador de baja frecuencia en los aparatos de radio
por Siemens y Halske en el año 1905.
Entre 1915 y 1920 empiezan a aparecer en el mercado comercial los
electrodomésticos, con lo cual se empieza a hacer más popular la corriente eléctrica en los
49
hogares, buscando hacer de las tareas domésticas, algo menos complicado y llegar a niveles
más altos de confort dentro del hogar.
Hacia el año de 1930 aparecen en el mercado los primeros termostatos con
contactos de mercurio, los cuales son sustituidos en 1936 por termostatos de contactos fijos
debido a razones sanitarias.
También se tenía para la década de 1930, una evolución relacionada con sistemas de
cómputo, de manera que en 1938, el alemán Konrad Zuse fabricó la primera calculadora
mecánica basada en el concepto del cálculo binario (llamada Z1). Para esta década, también
se dan las primeras ideas de hogares automatizados, en varias ferias mundiales efectuadas
(Chicago 1934, Nueva York 1939), donde se muestran casas electrificadas y con ciertas
funciones automatizadas. Para el año de 1939, en la exposición Suiza de Zúrich, uno de los
modernos edificios, el Sukulentenhaus, se equipa con una de las primeras regulaciones en
función de las condiciones climatológicas exteriores, lo cual representó una de las primeras
implementaciones de automatismos en los edificios.
En 1940, la multinacional líder en soluciones de medición de energía para servicios
públicos Landis+Gyr, crea un departamento independiente para fomentar y controlar el
desarrollo y la comercialización de los equipos de regulación para aplicaciones de
calefacción y aire acondicionado.
Siguiendo con la evolución de la electrónica, en la década de 1940 varios eventos
importantes ocurren. Para 1944 se construye lo que se considera como el primer ordenador
de naturaleza electrónica, el MARK I (producida por Howard H. Aiken), fruto de la
colaboración entre la Universidad de Harvard y la empresa IBM. Luego, para el año 1946
es presentado el ENIAC (producida entre el gobierno estadounidense y la Universidad de

50
Pennsylvania, y desarrollada por John Presper Eckert y John W. Mauchly), ordenador que
marca el nacimiento de los computadores de primera generación. Años más tarde, en 1948,
los Laboratorios Bell presentan el transistor (inventado por John Bardeen, Walter Houser
Brattain y William Bradford Shockley), el cual empezó a tener comercialización en el
mercado hasta 1952 debido a la fuerte competencia con los tubos de vacío. Este hecho
facilita enormemente el crecimiento de la electrónica, y es a partir de entonces que surgen
elementos como el DIAC, el TRIAC y otros, que luego se empiezan a utilizar en la
regulación de sistemas de potencia.
En 1953 aparecen las primeras centrales de regulación equipadas con sondas
bimetálicas y contactos de relé.
Alrededor de la década de 1950, se empiezan a introducir ciertos accesorios de
automatización en las instalaciones eléctricas convencionales para eliminar los seguros
mecánicos y hacerlos de manera electrónica, electromecánica o electromagnética.
Para el año 1959, IBM construye los primeros ordenadores utilizando la tecnología
del transistor (ordenadores de segunda generación), y tiempo después, Robert Noyce idea el
plan para construir múltiples transistores en una misma pieza de silicio (circuitos
integrados), los cuales disminuyen drásticamente el tamaño y el precio de los equipos.
En 1966, el ingeniero de la compañía Westinghouse Electric, Jim Sutherland,
desarrolla un sistema de automatización para hogares de vivienda llamado ECHO IV, el
cual se trató de un proyecto privado que nunca se comercializó.
Internet aparece por primera vez en 1969, cuando tres universidades
estadounidenses crean una red por medio de ARPANET, mejorándose en los años 80 por
trabajadores del CERN, consiguiendo no sólo conectar los ordenadores, sino también
compartiendo los archivos entre los mismos. Este evento fomentó la creación de redes de
51
datos y más tarde, las pasarelas residenciales, evento con el cual se puede empezar a hablar
de hogares digitales.
Para el año 1971 Intel crea el primer microprocesador (llamado 4004), el cual es un
componente revolucionario en el campo de la informática y del control, que vino a facilitar
la innovación en sistemas domoticos.
3.2 Evolución domótica [1] [2] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32]
La evolución temporal de los sistemas domóticos se puede estudiar desde la forma
en que han evolucionado los protocolos usados en dichos sistemas. La figura 3.3 ilustra
algunos de los eventos más importantes referentes a esta evolución, donde las líneas roja,
morada y verde marcan los períodos de uso de los 3 protocolos de mayor relevancia en el
mercado.
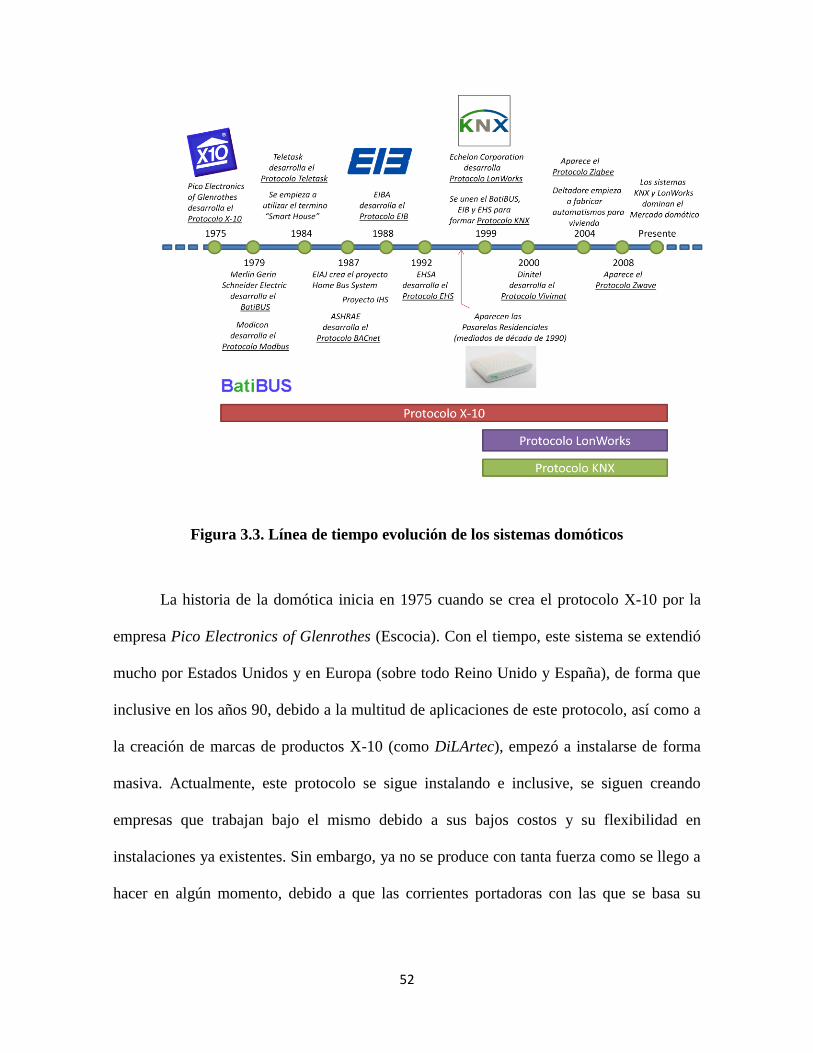
52
Ilustración 25Figura 3.3. Línea de tiempo evolución de los sistemas domóticos
Figura 3.3. Línea de tiempo evolución de los sistemas domóticos
La historia de la domótica inicia en 1975 cuando se crea el protocolo X-10 por la
empresa Pico Electronics of Glenrothes (Escocia). Con el tiempo, este sistema se extendió
mucho por Estados Unidos y en Europa (sobre todo Reino Unido y España), de forma que
inclusive en los años 90, debido a la multitud de aplicaciones de este protocolo, así como a
la creación de marcas de productos X-10 (como DiLArtec), empezó a instalarse de forma
masiva. Actualmente, este protocolo se sigue instalando e inclusive, se siguen creando
empresas que trabajan bajo el mismo debido a sus bajos costos y su flexibilidad en
instalaciones ya existentes. Sin embargo, ya no se produce con tanta fuerza como se llego a
hacer en algún momento, debido a que las corrientes portadoras con las que se basa su

53
funcionamiento, dependen directamente de la calidad con que llegue la corriente al recinto
domótico, y por lo tanto, es muy vulnerable a las frecuentes alteraciones de la misma.
El término “Smart House” o casa inteligente fue acuñado por primera vez por la
American Association of HouseBuilders en el año 1984, y a partir de entonces, esta
terminología se ha relacionado con viviendas que tengan cierto nivel de automatización en
los diferentes elementos que forman parte de su instalación eléctrica. Es también a partir de
esta fecha que empiezan a hacerse más populares a nivel comercial los sistemas domóticos
y en Europa, entre los años 1987 y 1988, seis empresas intensifican su trabajo con el primer
proyecto IHS, gracias al cual, actualmente se tiene el programa ESPIRIT, el cual se enfoca
en definir una norma de integración para los sistemas electrónicos domésticos analizando
sus campos de aplicación en la vivienda.
En España la domótica tiene sus orígenes en la década de 1990 en el Institut Cerdà,
donde se empiezan a dar las primeras investigaciones relacionadas con el tema en dicho
país. Por su parte, en Japón, a partir de la creación del proyecto Home Bus System por parte
de la EIAJ en 1987, se da un crecimiento exponencial en la implementación de las casas
inteligentes, de manera que para 1990 se estimaba que las instalaciones domóticas
sobrepasarían la cifra de 600.000, y para fin de siglo, se previó que funcionarían en el país
ocho millones.
Mientras se extendía el protocolo X-10, grandes empresas del sector eléctrico
relacionadas con la automatización, empezaron a darle mayores utilidades a los “autómatas
programables”, y así los llevaron a los sistemas eléctricos de las viviendas. De esta manera
nacen los protocolos europeos BatiBus en 1979 (desarrollado por la empresa Merlin Gerin
54
Schneider Electric, con fuerte implementación en países como Francia o Italia), EIB a
finales de los años 80’s (desarrollado por la EIBA, mayormente usado en países de habla
alemana) y EHS en 1992 (desarrollado por la EHSA, utilizado en las líneas de
electrodomésticos y en sistemas de audio y video), los cuales, a finales de los años 90’s
deciden unirse y crear un estándar común, al cual llaman KNX. Este nuevo sistema es
popularizado en el 2002, y basa su funcionamiento en buena parte en la tecnología EIB,
reforzado con los sistemas de transmisión de datos del BatiBus y EHS.
A pesar de que este nuevo protocolo es de origen completamente europeo, desde el
año 2002 empieza a experimentar un crecimiento sin precedentes tanto en Europa, como en
Estado Unidos, China y Emiratos Árabes Unidos, de manera que en el 2005 existían 80
fabricantes a nivel mundial de estos sistemas KNX, y para inicios del 2009 ya habían
alrededor de 140.
Por otro lado, en 1999 nace el protocolo de comunicación llamado LonWoks como
estándar de control de redes. Con el tiempo, se van normalizando varias aplicaciones de
este sistema (desde transmisión por par trenzado, hasta control de trenes y frenos
electroneumáticos), hasta que en el 2005 se convierte en un estándar europeo de domótica y
meses después, en el mismo año, en estándar mundial bajo la norma ISO/IEC-14908. Al
igual que KNX, este sistema sufre un fuerte incremento en el número de fabricantes a nivel
mundial, de manera que se estima que para el 2006 había un total de 60 millones de
dispositivos con tecnología LonWorks instalados, y para el 2010, 90 millones.
Se desarrollaban también alrededor del mundo una multitud de protocolos como el
CEBus (estándar promocionado en 1992 por el grupo de electrónica de consumo de la EIA

55
en Estados Unidos, primer país en promover un protocolo), Modbus (desarrollado por
Modicon en 1979), BACnet (desarrollado por ASHRAE en 1987), Bus-CAN, BUSing,
Dupline, xAP y xPL, capaces de realizar ciertas funciones domóticas, sin embargo, estos no
fueron de aplicación tan fuerte como KNX y LonWorks.
Empezaron a nacer desde la década de 1980 y hasta inicios del siglo XXI, una gran
cantidad de protocolos propietarios, especialmente en Europa, donde aparecieron marcas
asociadas a los mismos como, Teletask (desarrollado en 1984 por la empresa del mismo
nombre), Deltadore (desarrollado en 2004 por la empresa del mismo nombre) e IHC. Fue
sobre todo en España donde se dio un fuerte crecimiento de estos sistemas, donde
aparecieron Vivimat (desarrollado por Dinitel en el año 2000), Ingenium, Miniatec,
Maxdomo, IPdomo, entre otros. Para cubrir un mercado más grande, se internacionalizaron
estos protocolos, lo cual generó que se crearan algunos de “gama media”, como el
canadiense Cardio (Secant) o el americano HAI, y otros de “gama alta”, como los
americanos Vantaje o Creston (estos últimos ofrecían estética de lujo e integración de
multimedia muy avanzada).
Algunas empresas de productos eléctricos como SimonVIS, las cuales no disponían
de sistemas domóticos en sus catálogos, optaron por estrategias de franquiciado para poder
ofrecer estos sistemas mientras construían su propio protocolo.
Aparecen también para la época, los “kits” domóticos, los cuales trabajando de
manera aislada, son capaces de controlar unas pocas entradas y salidas. Debido a los bajos
precios de estos productos, empiezan a competir en el mercado con el resto de los sistemas
domóticos.
56
En el año 2000, y a partir de entonces, se ve un fuerte incremento de pequeñas
empresas fabricantes de productos domóticos apoyados en el protocolo KNX (como
Lingg&Hanke, Arcus, Zennio e Indomotika) y LonWorks (como BJC, ISDE, SimonVITA),
logrando cubrir nuevos nichos de mercado, compitiendo en precios, enriqueciendo la gama
de productos y haciendo más fuerte estos protocolos estándar.
Entre mediados y finales de la primera década del siglo XXI, se empiezan a crear
sistemas domóticos inalámbricos de radio frecuencias, usándose protocolos como Zigbee
(disponible desde el 2004) y Zwave (aparece en el 2008). Algunos de éstos se crean
compatibles con X-10, mientras el resto son complementarios a sistemas cableados como
IHC v3, KNX Zwave, KNX RF, o sistemas de radiofrecuencia independientes con interfaces
a otros sistemas. Es con estos protocolos que surgen los mandos a distancia RF, que son
cada vez más comunes en sistemas domóticos.
Aparte de los protocolos, un evento importante que marcó un gran avance en los
sistemas domóticos fue la aparición de las pasarelas residenciales a mediados de la década
de 1990. Gracias a este evento es que da inicio la era de los hogares digitales, de manera
que se crean sistemas complejos de intercomunicación entre los distintos productos de las
líneas blanca y marrón (electrodomésticos y electrónica de entretenimientos como
televisores, consolas de video juego, equipos de sonido, entre otros) con los demás
elementos de automatización del hogar (sensores, controladores, actuadores) e inclusive, de
todos los anteriores con el exterior por medio del Internet. Además, gracias a las pasarelas
residenciales, se empiezan a hacer más comunes los electrodomésticos inteligentes, los
cuales aparecen a inicios del siglo XXI y desde entonces se han ido integrando cada vez
más a los hogares digitales.
57
En los últimos años se ha observado un fuerte desarrollo de productos, en gama y
capacidades, de manera especial sobre protocolos abiertos, donde KNX (líder en Europa) y
LonWorks (líder en Norteamérica) lideran el mercado. Además, es muy común encontrar
empresas que fabrican sistemas complementarios relacionados con la domótica, como
SOMFY (automatismos de persianas y puertas) o DALI (iluminación inteligente), las cuales
han creado interfaces para conectar sus productos a los sistemas domóticos estándar
existentes, ampliando así su mercado y pasando de sistemas aislados de regulación local a
sistemas integrados en estándares domóticos. El resto de protocolos, especialmente los
propietarios, se ven cada vez más fuertemente eclipsados por los sistemas KNX y
LonWorks, capaces de acometer complejos sistemas de regulación, que junto a la
integración con energías alternativas, pueden cubrir las expectativas de ahorro energético y
eficiencia. Esto ha generado que algunas empresas líderes en protocolos propietarios, como
Creston o Deltadore, empiecen a hacer movimientos para pasar sus productos a los
sistemas KNX o LonWorks.
El futuro de las redes domóticas es ir ligando cada vez más a los sistemas KNX y
LonWorks con el protocolo de comunicación IP, por medio de pasarelas residenciales, esto
para tener un mejor control de datos por medio externos, e inclusive facilitar el transporte
de datos y multimedia por medio de un bus común de control, integrando las 3 redes
domóticas en una sola.
58
CAPÍTULO 4: Alarmas Inteligentes dentro del hogar domótico
Cuando se habla de alarmas inteligentes enfocándose en sistemas domóticos, se
habla de muchas tendencias actuales enfocadas en diferentes aspectos de seguridad que
pueden abarcar las alarmas. Existen alarmas de seguridad, también llamadas alarmas contra
intrusión, y alarmas técnicas, las primeras son básicamente para la seguridad de las
personas y los bienes materiales del hogar ante posibles amenazas de robo o intrusión de
personas no deseadas, mientras que las segundas son directamente enfocadas en la
prevención de accidentes que puedan poner en riesgo el bienestar físico de las personas
dentro de la casa, como intoxicaciones por fugas de gas, quemaduras ante posibles
incendios, situaciones médicas de riesgo (alarmas médicas), entre otras.
Una característica importante de este tipo de dispositivos, es el hecho de que ante
una situación de riesgo, la alarma inteligente la detecte a tiempo y tome una o varias
acciones correctivas que traten de detener esta situación.
El funcionamiento de las alarmas inteligentes dentro de un sistema domótico es bajo
el mismo concepto de la automatización de red de control y de datos de las demás partes de
la casa inteligente. Es decir, se tienen sensores, actuadores, controlador y varios
dispositivos inteligentes que se pueden agregar a la topología.
Es importante destacar que, aunque el sistema de alarma inteligente se puede añadir
al sistema domótico dentro de la misma red de control y de datos, usando el mismo
controlador principal (en el caso de una arquitectura centralizada), la tendencia que
actualmente se tiene en alarmas para casas inteligentes, es crear todo un sistema de control

59
aparte; es decir, que se utilice un controlador solo para la alarma con su propia red de
control y su propia red de datos. Esto se hace de esta manera para darle un mayor nivel de
robustez a la alarma, de manera que la misma no dependa de la funcionalidad del
controlador principal de la casa inteligente.
Además, como se ha comentado ya en varias ocasiones, la tendencia actual es, por
medio de la pasarela residencial, conectar el sistema de control de la casa a una red externa
de Internet. Esto representa otro motivo por el cual se suele independizar a la alarma de
este sistema, ya que, de esa manera se evitan posibles ingresos indeseados al sistema de
alarma por medio de Internet.
Para entender de una mejor manera el funcionamiento de las alarmas inteligentes se
proponen las siguientes situaciones de riesgo como ejemplo para saber el procedimiento en
cada parte de la alarma.
4.1 Situación #1: intrusión de persona no deseada
Primero, para este caso, se tienen diferentes sensores dentro de la casa, por ejemplo,
detectores perimetrales del tipo contacto magnético cableados o inalámbricos (que pueden
enviar su información por medio de tecnología Bluetooth o en radiofrecuencias), varios
detectores de presencia de tecnología ultrasónica ubicados en puntos estratégicos dentro de
la vivienda, entre otros dispositivos de detección. Luego se tiene el circuito de control, que
en este caso es un microcontrolador que tiene también un dispositivo telefónico conectado a
él por medio de una red de datos o integrado al mismo. Es importante mencionar que una
tendencia actual es colocar una “tarjeta SIM” como medio de comunicación telefónica, o

60
sea, que no se utilice la línea telefónica fija del hogar, sino que se utilice un dispositivo de
telefonía móvil, para evitar cortes del cable telefónico. Además, se adjunta a este sistema
una sirena y un señalizador luminoso.
Teniendo lo anteriormente mencionado, la situación que se podría dar de una
intrusión es detectada por alguno de los sensores instalados, luego, este dispositivo le envía
al controlador, tanto una señal de activación como la información de su propia ubicación
(ya sea que se trate de una red de control tipo bus o tipo estrella, cada dispositivo tendrá su
dirección física). El circuito de control sería programado por el usuario previamente,
mediante una interfaz, para que a ciertas horas o antes ciertas situaciones (vacaciones, horas
laborales, horas de descanso, salidas por motivos varios), cuando reciba esta señal, el
mismo active la sirena y las luces señalizadoras, además de que active el dispositivo
telefónico (al cual se le puede guardar previamente ciertos números de teléfono y un
mensaje predeterminado ante la situación de intrusión), para que envíe el mensaje mediante
llamada o mensaje de texto a los números guardados, y así avisar de la intrusión. La
situación descrita se ilustra en la figura a continuación.
Ilustración 26Figura 4.1. Situación de intrusión alarma
Figura 4.1. Situación de intrusión alarma
61
4.2 Situación #2: situación de riesgo de accidente dentro del Hogar
Se tiene una situación de riesgo que puede ser una fuga de gas, o un posible motivo
de incendio (humo), una situación médica crítica (en este caso se supervisa a la persona por
medio de equipo médico y cuando exista una situación de riesgo, el mismo envía la señal
por la red de control), entre otras; de manera que cuando sea detectada por el sensor o
dispositivo de detección correspondiente, el mismo le envíe la información acerca de la
situación al controlador de la alarma (señal de activación junto con su dirección física).
Aquí existen dos caminos posibles dependiendo del tipo de alarma: ya sea que el
controlador mande la señal de activación al actuador, o lo más comúnmente diseñado, que
sea el sensor quien le envíe directamente la indicación al actuador para que éste realice su
función; por ejemplo, si es una fuga de gas, apenas es detectada por el sensor de fuga, el
mismo envía la señal al controlador y al actuador al mismo tiempo. Al controlador para que
notifique al usuario acerca de la situación de alguna manera, por ejemplo, alguna luz
señalizadora o alguna señal de aviso en una pantalla; y al actuador para que cierre la
válvula de gas de manera inmediata. Esto se realiza de esta manera debido a que la
seguridad del usuario es prioridad y no se puede depender de un camino tan largo (sensor-
control-actuador) para poder llevar a cabo la acción preventiva. La acción debe ser
inmediata.
En la figura 4.2 se ilustra la situación de riesgo descrita (detección de fuga de gas) y
la acción de la alarma en este caso.
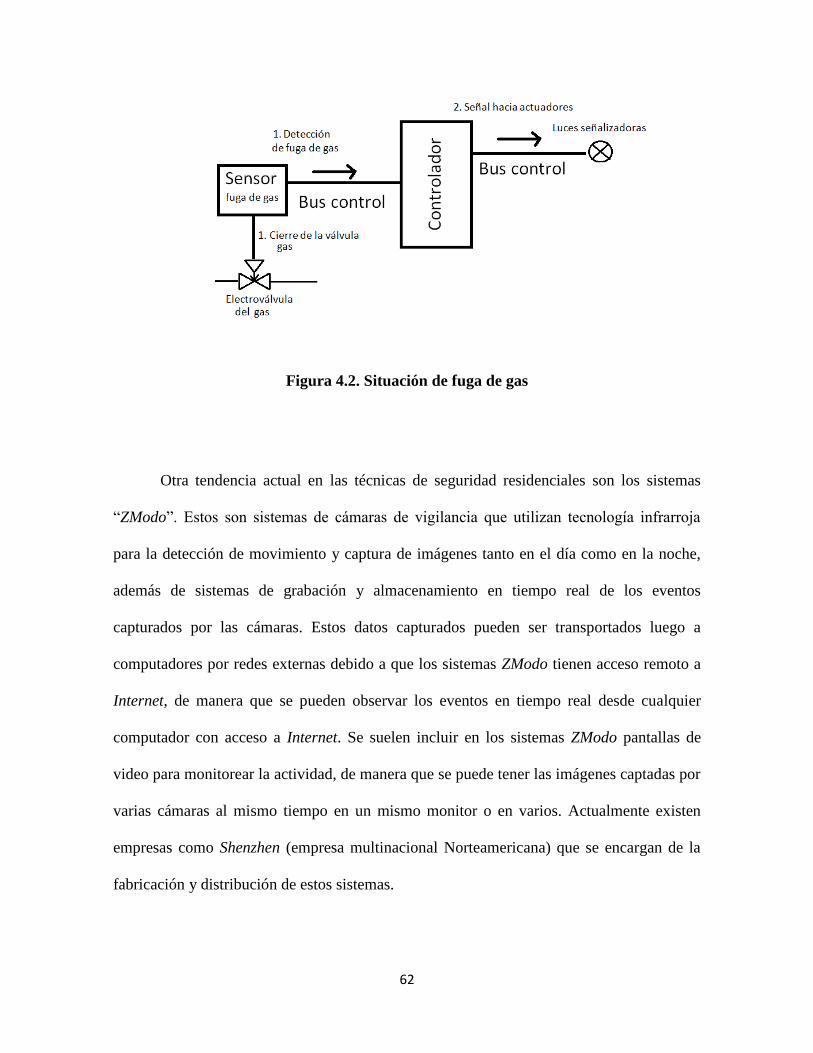
62
Ilustración 27Figura 4.2. Situación de fuga de gas
Figura 4.2. Situación de fuga de gas
Otra tendencia actual en las técnicas de seguridad residenciales son los sistemas
“ZModo”. Estos son sistemas de cámaras de vigilancia que utilizan tecnología infrarroja
para la detección de movimiento y captura de imágenes tanto en el día como en la noche,
además de sistemas de grabación y almacenamiento en tiempo real de los eventos
capturados por las cámaras. Estos datos capturados pueden ser transportados luego a
computadores por redes externas debido a que los sistemas ZModo tienen acceso remoto a
Internet, de manera que se pueden observar los eventos en tiempo real desde cualquier
computador con acceso a Internet. Se suelen incluir en los sistemas ZModo pantallas de
video para monitorear la actividad, de manera que se puede tener las imágenes captadas por
varias cámaras al mismo tiempo en un mismo monitor o en varios. Actualmente existen
empresas como Shenzhen (empresa multinacional Norteamericana) que se encargan de la
fabricación y distribución de estos sistemas.
63
CAPÍTULO 5: Algunas técnicas de fabricación casera de
sistemas domóticos
En la actualidad, debido a la proliferación a nivel mundial de los sistemas
domóticos, surgen algunas ideas para la fabricación casera de sistemas de control de las
instalaciones eléctricas en las casas de habitación, apuntando a soluciones de bajos costos
comerciales y de fácil fabricación.
La mayor parte de los sistemas propuestos actualmente, utilizan una arquitectura
centralizada, que incluye un controlador principal que se encarga de recibir las señales de
activación de los interruptores y sensores adjuntos y crear señales de control sobre los
dispositivos que abren o cierran el paso al circuito de corriente alterna. El elemento de
control utilizado para esta función, suele ser un microcontrolador, como es el caso de los
Arduinos, o directamente, que es lo más común en técnicas de fabricación casera, una PC.
Este último es el caso más común debido a que un computador permite mayor flexibilidad
en su programación, así como en la posibilidad de realizar cambios al programa establecido
de una manera más sencilla. También, por medio de un computador, se poseen los
elementos necesarios para poder interactuar directamente con la instalación de una manera
más gráfica por medio de programación, lo cual podría hacer más sencillo el control de la
instalación para el usuario final. Otra ventaja del computador, es que, normalmente la
inversión económica que se tiene que hacer, en realidad es menor, ya que se busca realizar
un programa y ponerlo a correr en cualquier máquina PC, y conectar un circuito externo a
la misma, y en la mayoría de las casas existe por lo menos una computadora.
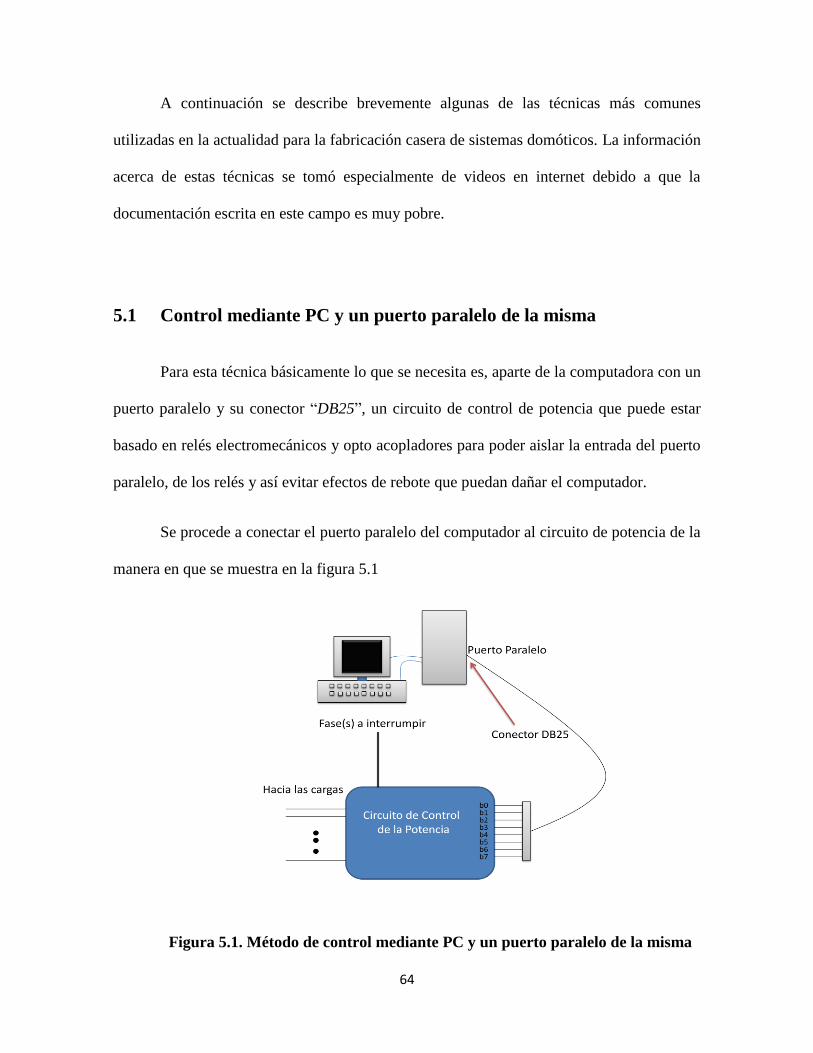
64
A continuación se describe brevemente algunas de las técnicas más comunes
utilizadas en la actualidad para la fabricación casera de sistemas domóticos. La información
acerca de estas técnicas se tomó especialmente de videos en internet debido a que la
documentación escrita en este campo es muy pobre.
5.1 Control mediante PC y un puerto paralelo de la misma
Para esta técnica básicamente lo que se necesita es, aparte de la computadora con un
puerto paralelo y su conector “DB25”, un circuito de control de potencia que puede estar
basado en relés electromecánicos y opto acopladores para poder aislar la entrada del puerto
paralelo, de los relés y así evitar efectos de rebote que puedan dañar el computador.
Se procede a conectar el puerto paralelo del computador al circuito de potencia de la
manera en que se muestra en la figura 5.1
Ilustración 28Figura 5.1. Método de control mediante PC y un puerto paralelo de la misma
Figura 5.1. Método de control mediante PC y un puerto paralelo de la misma

65
Básicamente se crea un software en la computadora, en el cual, al seleccionarse
algún elemento gráfico en el monitor con el mouse o con algún botón del teclado, se envíe
un dato por el puerto paralelo de la computadora al “Circuito de Control de Potencia”.
Como se sabe que un conector de puerto paralelo “DB25” tiene la capacidad de enviar en
paralelo 8 bits, se pueden manipular estos bits para indicar que las diversas combinaciones
entre ellos, puedan significar la activación de diferentes relés en el Circuito de Control de
Potencia, con lo cual, se enciendan o se apaguen las cargas conectadas. Por ejemplo, de una
manera sencilla se puede indicar, para el control de 8 cargas, que un 1 en b0 significa que el
primer relé esté activado, con lo cual, se tenga encendida la carga que controla este relé,
mientras que si en esta misma línea se presenta un 0, se desactive el relé y se apague la
carga. De esta manera, tan solo habría que conectar cada línea de bit desde b0 hasta b7, de
manera individual al opto acoplador que antecede al relé de la carga que se busca controlar
con dicha línea.
5.2 Control mediante PC y microcontrolador utilizando el puerto serial
Este método es un poco más complejo que el anteriormente descrito, aunque, como
ventaja con respecto al anterior, presenta la capacidad de poder controlar una mayor
cantidad de cargas y de tener una mayor facilidad para poder activar las mismas por medios
externos a la computadora como interruptores, sensores, entre otros, sin tener que
conectarlos a algún puerto de la computadora, lo cual evita cantidades excesivas de
cableado cercano llegando a ésta.
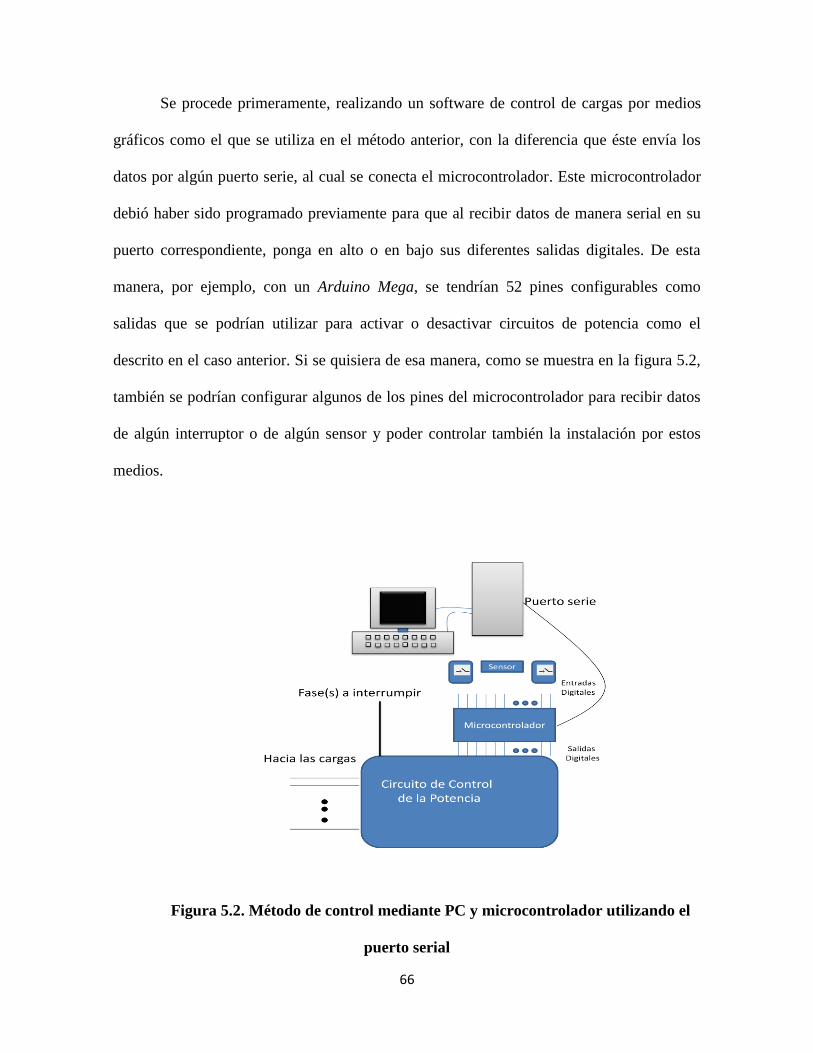
66
Se procede primeramente, realizando un software de control de cargas por medios
gráficos como el que se utiliza en el método anterior, con la diferencia que éste envía los
datos por algún puerto serie, al cual se conecta el microcontrolador. Este microcontrolador
debió haber sido programado previamente para que al recibir datos de manera serial en su
puerto correspondiente, ponga en alto o en bajo sus diferentes salidas digitales. De esta
manera, por ejemplo, con un Arduino Mega, se tendrían 52 pines configurables como
salidas que se podrían utilizar para activar o desactivar circuitos de potencia como el
descrito en el caso anterior. Si se quisiera de esa manera, como se muestra en la figura 5.2,
también se podrían configurar algunos de los pines del microcontrolador para recibir datos
de algún interruptor o de algún sensor y poder controlar también la instalación por estos
medios.
Ilustración 29Figura 5.2. Método de control mediante PC y microcontrolador utilizando el puerto serial
Figura 5.2. Método de control mediante PC y microcontrolador utilizando el
puerto serial
67
5.3 Control mediante dispositivos remotos de manera inalámbrica
Se trata de una de las técnicas de control domótico casero cuya implementación se
está acrecentando cada vez más con el auge de los celulares inteligentes. Básicamente, lo
que se realiza es enviar un código de manera inalámbrica, ya sea por medio de Bluetooth o
por infrarrojos, para la activación de las cargas.
Un método que se utiliza mucho hoy en día para poder enviar datos vía Bluetooth,
es la creación de un software, ya sea con el sistema operativo “Android”, o por medio del
sistema operativo “iOS”, o cualquier otro sistema operativo para celulares, que permita, por
medio de la activación en la pantalla táctil de algún elemento dentro del software, el envío
de datos de manera inalámbrica hacia algún receptor de Bluetooth que active, dependiendo
del código enviado, una carga u otra. Básicamente se necesitaría: un teléfono móvil con el
software, un circuito receptor de Bluetooth, un microcontrolador y un “circuito de control
de potencia” para la activación de las cargas. En la figura 5.3 se muestra la forma de
conectar estos elementos.
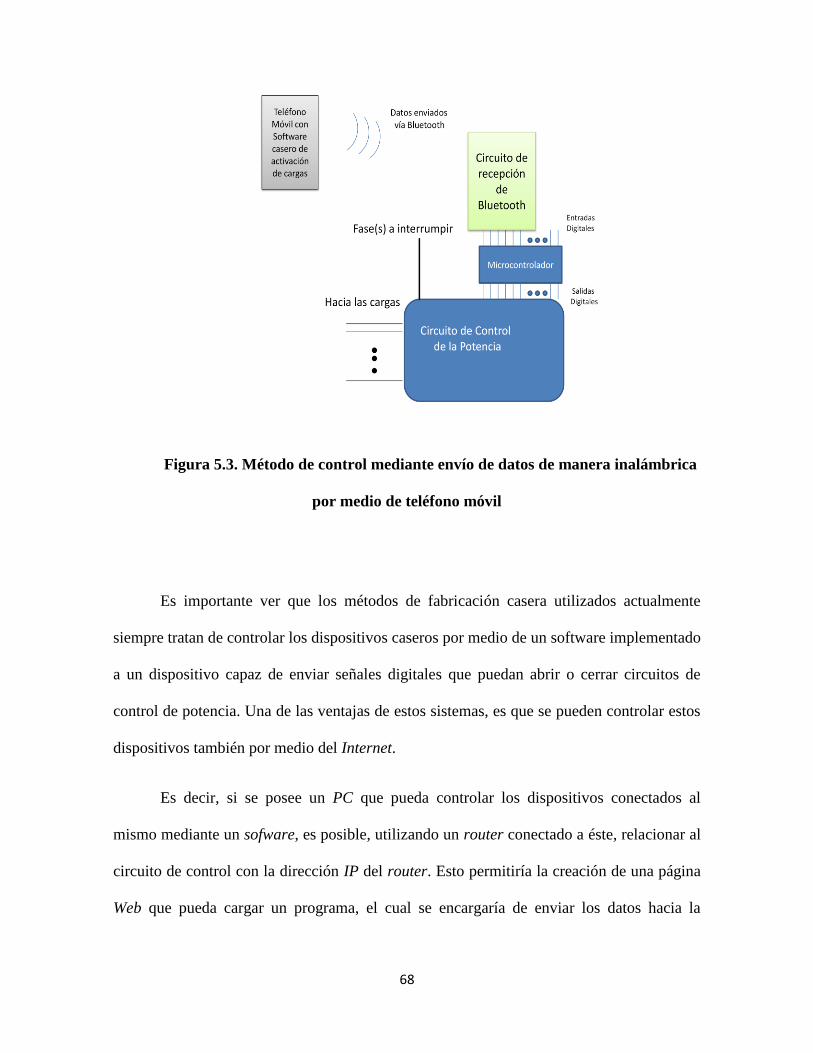
68
Ilustración 30Figura 5.3. Método de control mediante envío de datos remotos de manera inalámbrica por medio de teléfono móvil
Figura 5.3. Método de control mediante envío de datos de manera inalámbrica
por medio de teléfono móvil
Es importante ver que los métodos de fabricación casera utilizados actualmente
siempre tratan de controlar los dispositivos caseros por medio de un software implementado
a un dispositivo capaz de enviar señales digitales que puedan abrir o cerrar circuitos de
control de potencia. Una de las ventajas de estos sistemas, es que se pueden controlar estos
dispositivos también por medio del Internet.
Es decir, si se posee un PC que pueda controlar los dispositivos conectados al
mismo mediante un sofware, es posible, utilizando un router conectado a éste, relacionar al
circuito de control con la dirección IP del router. Esto permitiría la creación de una página
Web que pueda cargar un programa, el cual se encargaría de enviar los datos hacia la

69
dirección IP del router, con lo que se podrían pasar estos datos al computador que controla
el sistema domótico.
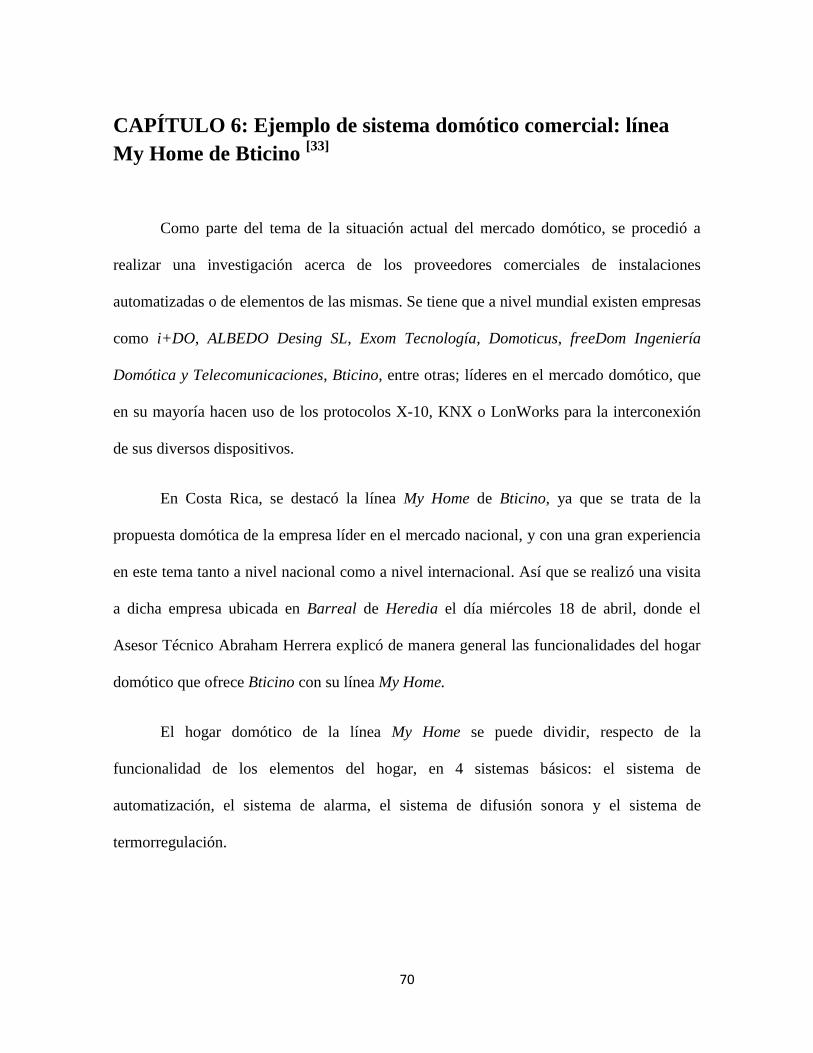
70
CAPÍTULO 6: Ejemplo de sistema domótico comercial: línea
My Home de Bticino [33]
Como parte del tema de la situación actual del mercado domótico, se procedió a
realizar una investigación acerca de los proveedores comerciales de instalaciones
automatizadas o de elementos de las mismas. Se tiene que a nivel mundial existen empresas
como i+DO, ALBEDO Desing SL, Exom Tecnología, Domoticus, freeDom Ingeniería
Domótica y Telecomunicaciones, Bticino, entre otras; líderes en el mercado domótico, que
en su mayoría hacen uso de los protocolos X-10, KNX o LonWorks para la interconexión
de sus diversos dispositivos.
En Costa Rica, se destacó la línea My Home de Bticino, ya que se trata de la
propuesta domótica de la empresa líder en el mercado nacional, y con una gran experiencia
en este tema tanto a nivel nacional como a nivel internacional. Así que se realizó una visita
a dicha empresa ubicada en Barreal de Heredia el día miércoles 18 de abril, donde el
Asesor Técnico Abraham Herrera explicó de manera general las funcionalidades del hogar
domótico que ofrece Bticino con su línea My Home.
El hogar domótico de la línea My Home se puede dividir, respecto de la
funcionalidad de los elementos del hogar, en 4 sistemas básicos: el sistema de
automatización, el sistema de alarma, el sistema de difusión sonora y el sistema de
termorregulación.

71
6.1 Sistema de Automatización
Basa su funcionamiento en una red de automatización fundamentada en un bus de
dos hilos, el cual es el encargado de permitir la comunicación entre los elementos
conectados al mismo y transportar la alimentación de dichos elementos.
Al tratarse de una topología en bus, cada elemento presenta su propia inteligencia,
de manera que es capaz de enviar o recibir información a través del bus. Es por este motivo
que se puede decir que la línea My Home funciona mediante una arquitectura
descentralizada y no presenta un controlador general del sistema domótico.
La manera en que funciona el sistema de automatización de esta línea es mediante
los que se llaman Comandos y los Actuadores. Estos primeros son básicamente todos los
elementos con que el usuario puede interactuar para enviar señales de comando, como lo
son los interruptores, los “dimmers”, las pantallas táctiles, entre otros. Los segundos son los
encargados de encender, apagar o regular la carga final, ya sea esta una luminaria, un
motor, una sirena, etc. (son los mismos expuestos en el capítulo 2). A continuación se
muestra una figura de cómo se realiza la conexión de los diferentes elementos al bus.
72
Ilustración 31Figura 6.1 Conexión de los diferentes elementos al bus en la línea My Home [16]
Figura 6.1 Conexión de los diferentes elementos al bus en la línea My Home
[33]
Como se muestra en la figura 6.1, cada uno de los Comandos así como cada uno de
los Actuadores son configurados dentro del bus para poder controlar las cargas. La manera
en que se realiza esto es mediante dos posibles métodos: mediante la instalación física de
los configuradores en cada Comando y en cada Actuador, y por medio de software.
El primer método se basa en unos elementos llamados Configuradores que se
pueden colocar en unas ranuras que tienen los Comandos y los Actuadores como se muestra
en la siguiente figura.

73
Ilustración 32Figura 6.2. Configuración de elementos línea My Home mediante el método de los configuradores [16]
Figura 6.2. Configuración de elementos línea My Home mediante el método de
los configuradores [33]
Como se aprecia en la figura 6.2, los Configuradores son básicamente unos
elementos que tienen una numeración o una especificación en cada uno de ellos. También
se puede observar cómo cada una de la ranuras del dispositivo a configurar tiene una
descripción, de manera que la influencia de cada Configurador dentro de la configuración
del elemento dependerá de la ranura en la cual será alojado. Así por ejemplo, la primera
ranura “A” representa el área o ambiente al que pertenece ya sea el comando o el actuador,
mientras que la ranura “PL” significa Punto Luz, que es básicamente el elemento al que
controla dentro del ambiente. Además de estas dos ranuras, dependiendo del tipo de
Actuador o de Comando que se trate, existirán otras ranuras y configuradores especiales
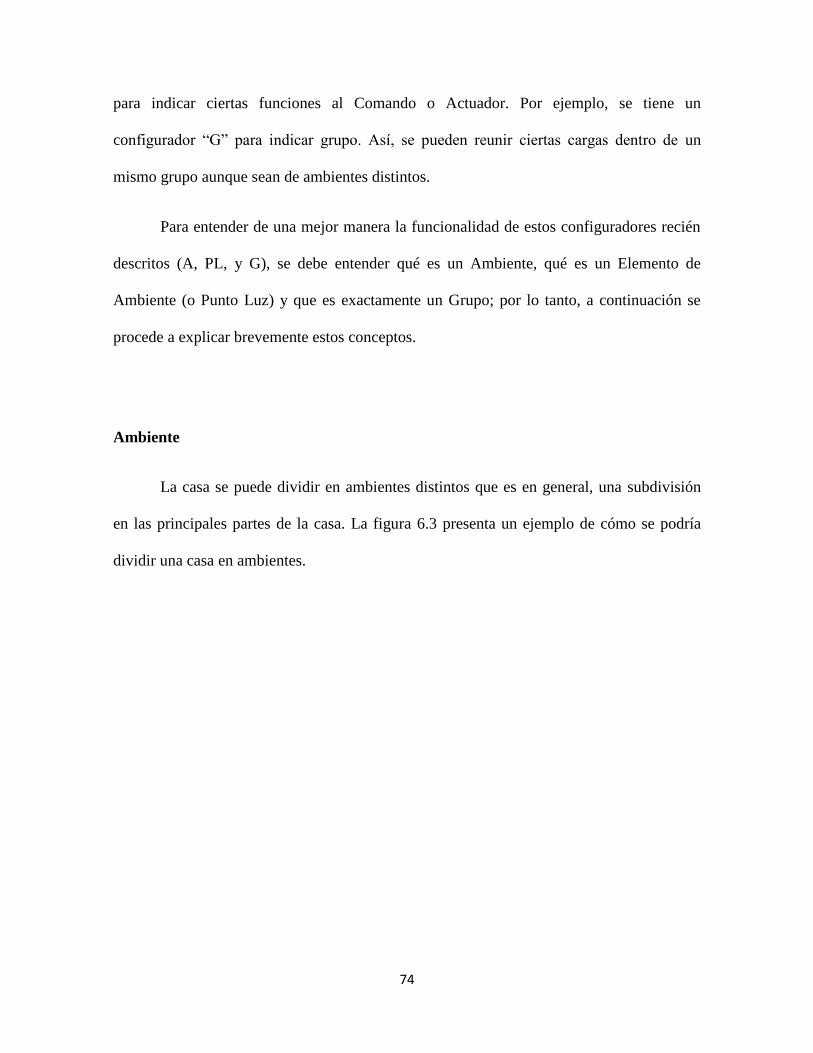
74
para indicar ciertas funciones al Comando o Actuador. Por ejemplo, se tiene un
configurador “G” para indicar grupo. Así, se pueden reunir ciertas cargas dentro de un
mismo grupo aunque sean de ambientes distintos.
Para entender de una mejor manera la funcionalidad de estos configuradores recién
descritos (A, PL, y G), se debe entender qué es un Ambiente, qué es un Elemento de
Ambiente (o Punto Luz) y que es exactamente un Grupo; por lo tanto, a continuación se
procede a explicar brevemente estos conceptos.
Ambiente
La casa se puede dividir en ambientes distintos que es en general, una subdivisión
en las principales partes de la casa. La figura 6.3 presenta un ejemplo de cómo se podría
dividir una casa en ambientes.
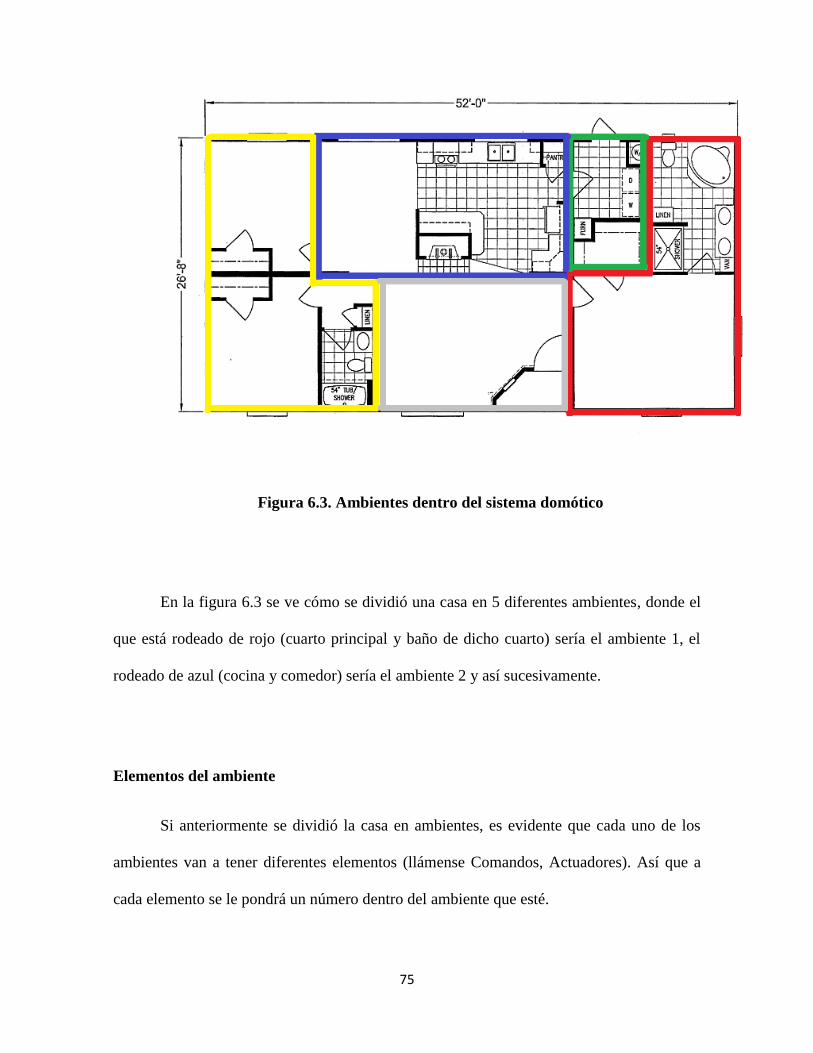
75
Ilustración 33Figura 6.3. Ambientes dentro del sistema domótico
Figura 6.3. Ambientes dentro del sistema domótico
En la figura 6.3 se ve cómo se dividió una casa en 5 diferentes ambientes, donde el
que está rodeado de rojo (cuarto principal y baño de dicho cuarto) sería el ambiente 1, el
rodeado de azul (cocina y comedor) sería el ambiente 2 y así sucesivamente.
Elementos del ambiente
Si anteriormente se dividió la casa en ambientes, es evidente que cada uno de los
ambientes van a tener diferentes elementos (llámense Comandos, Actuadores). Así que a
cada elemento se le pondrá un número dentro del ambiente que esté.

76
Ilustración 34Figura 6.4. Diferentes elementos dentro de un ambiente
Figura 6.4. Diferentes elementos dentro de un ambiente
En la figura 6.4 se puede ver cómo se tienen 4 elementos dentro del ambiente 2. Se
nombran como: Comando 1, Comando 2, Actuador 1 y Actuador 2.
Se puede ver, por ejemplo, que el elemento señalado como Comando 1 en la
imagen, sería el Comando 1 del Ambiente 2.
Grupos
Cuando dentro de un sistema domótico se tienen ambientes, es posible que existan
ciertas rutas dentro de la casa que representen ser de tránsito muy común.

77
Por ejemplo, si se tiene una casa de dos pisos, donde el servicio sanitario se
encuentra en el primer piso, una posible ruta de tránsito sería desde el cuarto de la niña
pequeña en el segundo piso hasta el servicio sanitario cuya ruta sería: cuarto de la niña,
pasadizo del segundo piso, escaleras, pasadizo del primer piso y servicio sanitario. Es
evidente que todas las luces que están dentro de esta ruta pueden pertenecer a diferentes
ambientes, de manera que se pueden incluir dentro de un Grupo para que, además de ser
controladas cada una por su propio interruptor, puedan ser controladas en conjunto por un
interruptor situado en algún punto específico.
Volviendo nuevamente a los Configuradores de la línea My Home, los mismos
principalmente tienen la funcionalidad de facilitar el trabajo en “escenarios”. Los
escenarios son básicamente el control de una o varias cargas de diferentes lugares de la casa
de manera individual o de manera grupal.
Cuando se habla de control individual de las cargas (también llamado “activación
punto a punto”), se trata básicamente de poder activar, desactivar o regular un actuador
cualquiera de un ambiente cualquiera con un Comando cuya dirección de Ambiente y
Punto Luz coincida con la dicho actuador. Por ejemplo, el Comando que tenga un
Configurador con el número 1 dentro de la ranura A y un 3 dentro de la ranura PL,
controlará al Actuador que tenga los mismos números de Configuradores dentro de las
mismas ranuras.
El control grupal se puede ejercer de dos maneras distintas: por medio del control
total de un Ambiente o por medio del control total de un Grupo. Si se quiere tener un
comando que controle un Ambiente, se le indicará esto por medio de los Configuradores y
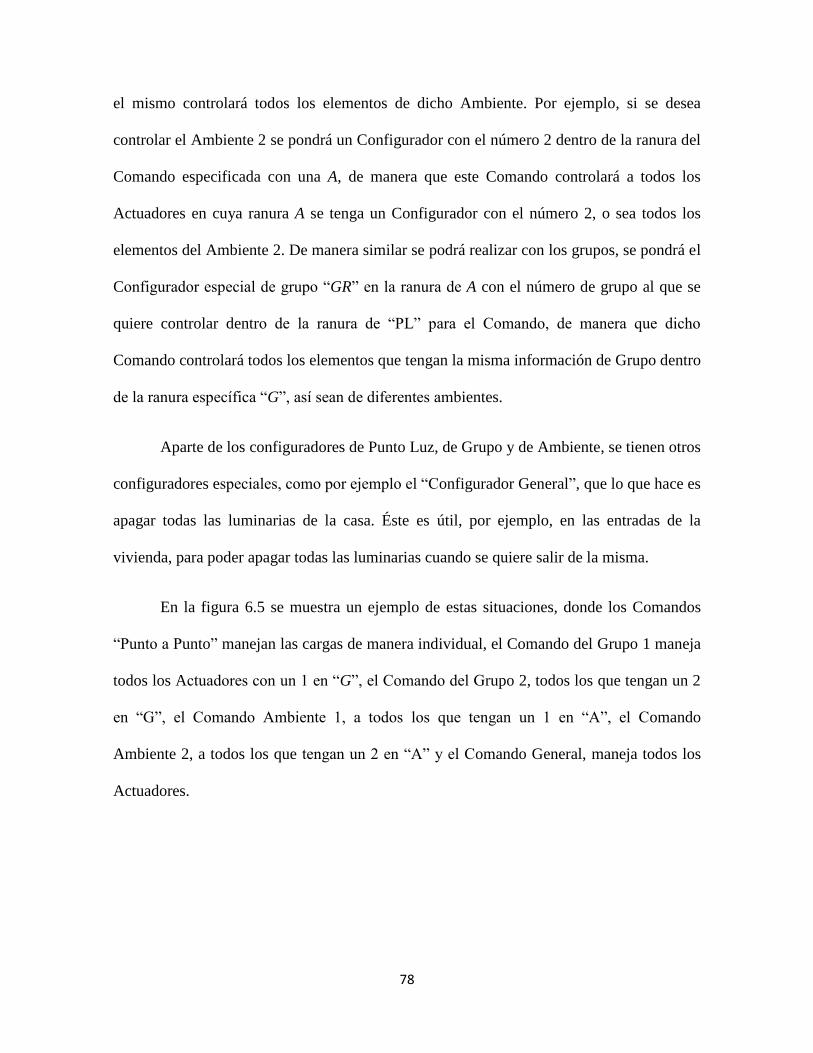
78
el mismo controlará todos los elementos de dicho Ambiente. Por ejemplo, si se desea
controlar el Ambiente 2 se pondrá un Configurador con el número 2 dentro de la ranura del
Comando especificada con una A, de manera que este Comando controlará a todos los
Actuadores en cuya ranura A se tenga un Configurador con el número 2, o sea todos los
elementos del Ambiente 2. De manera similar se podrá realizar con los grupos, se pondrá el
Configurador especial de grupo “GR” en la ranura de A con el número de grupo al que se
quiere controlar dentro de la ranura de “PL” para el Comando, de manera que dicho
Comando controlará todos los elementos que tengan la misma información de Grupo dentro
de la ranura específica “G”, así sean de diferentes ambientes.
Aparte de los configuradores de Punto Luz, de Grupo y de Ambiente, se tienen otros
configuradores especiales, como por ejemplo el “Configurador General”, que lo que hace es
apagar todas las luminarias de la casa. Éste es útil, por ejemplo, en las entradas de la
vivienda, para poder apagar todas las luminarias cuando se quiere salir de la misma.
En la figura 6.5 se muestra un ejemplo de estas situaciones, donde los Comandos
“Punto a Punto” manejan las cargas de manera individual, el Comando del Grupo 1 maneja
todos los Actuadores con un 1 en “G”, el Comando del Grupo 2, todos los que tengan un 2
en “G”, el Comando Ambiente 1, a todos los que tengan un 1 en “A”, el Comando
Ambiente 2, a todos los que tengan un 2 en “A” y el Comando General, maneja todos los
Actuadores.
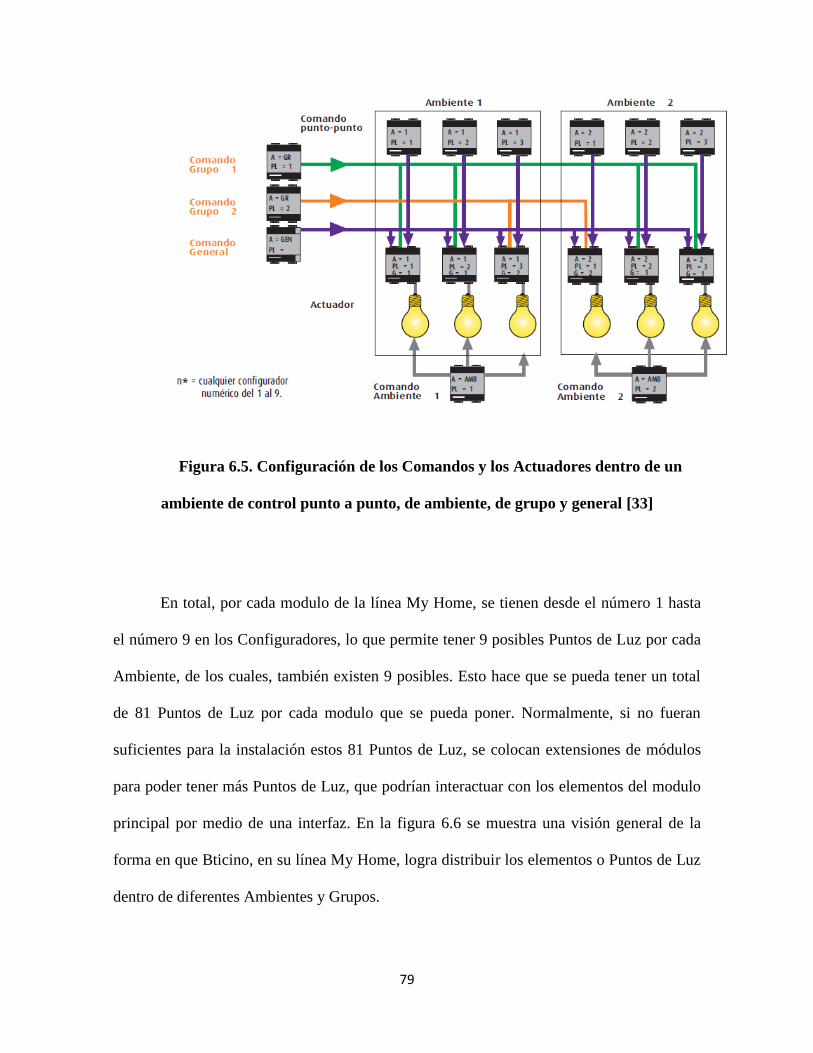
79
Ilustración 35Figura 6.5. Configuración de los Comandos y los Actuadores dentro de un ambiente de control punto a punto, de ambiente, de grupo y general [16]
Figura 6.5. Configuración de los Comandos y los Actuadores dentro de un
ambiente de control punto a punto, de ambiente, de grupo y general [33]
En total, por cada modulo de la línea My Home, se tienen desde el número 1 hasta
el número 9 en los Configuradores, lo que permite tener 9 posibles Puntos de Luz por cada
Ambiente, de los cuales, también existen 9 posibles. Esto hace que se pueda tener un total
de 81 Puntos de Luz por cada modulo que se pueda poner. Normalmente, si no fueran
suficientes para la instalación estos 81 Puntos de Luz, se colocan extensiones de módulos
para poder tener más Puntos de Luz, que podrían interactuar con los elementos del modulo
principal por medio de una interfaz. En la figura 6.6 se muestra una visión general de la
forma en que Bticino, en su línea My Home, logra distribuir los elementos o Puntos de Luz
dentro de diferentes Ambientes y Grupos.
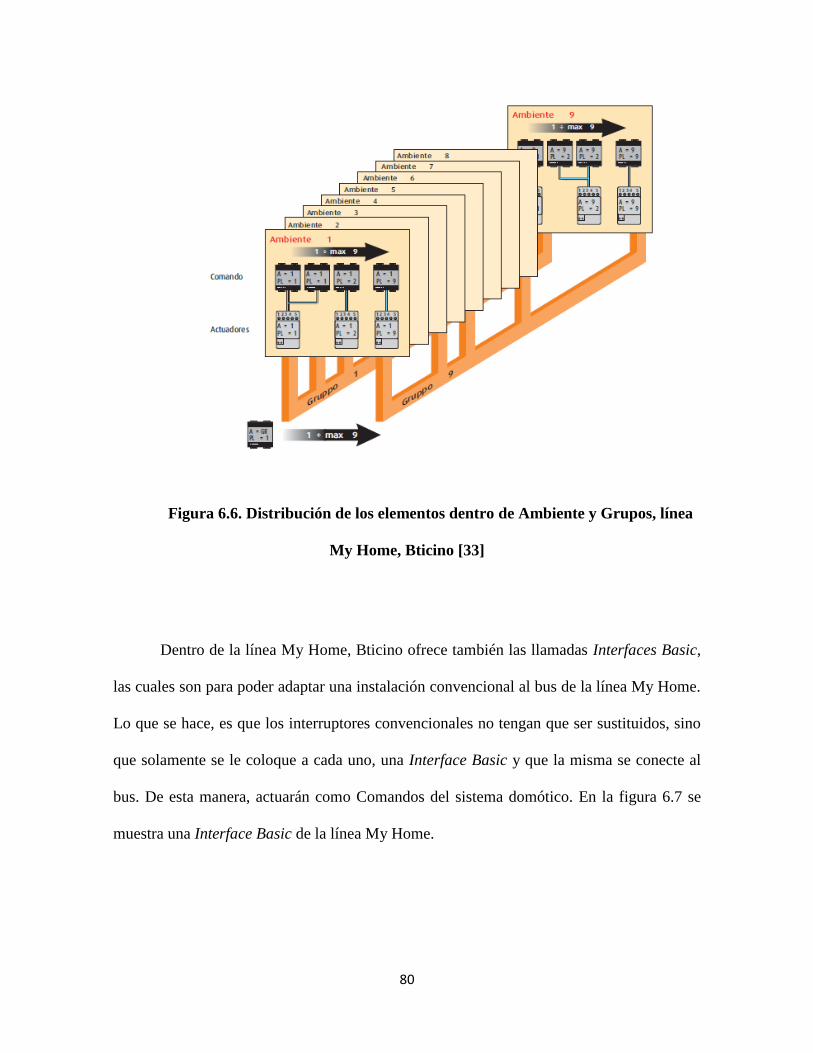
80
Ilustración 36Figura 6.6. Distribución de los elementos dentro de Ambiente y Grupos, línea My Home, Bticino [16]
Figura 6.6. Distribución de los elementos dentro de Ambiente y Grupos, línea
My Home, Bticino [33]
Dentro de la línea My Home, Bticino ofrece también las llamadas Interfaces Basic,
las cuales son para poder adaptar una instalación convencional al bus de la línea My Home.
Lo que se hace, es que los interruptores convencionales no tengan que ser sustituidos, sino
que solamente se le coloque a cada uno, una Interface Basic y que la misma se conecte al
bus. De esta manera, actuarán como Comandos del sistema domótico. En la figura 6.7 se
muestra una Interface Basic de la línea My Home.

81
Ilustración 37Figura 6.7. Interfaz Basic línea My Home, Bticino [16]
Figura 6.7. Interface Basic línea My Home, Bticino [33]
6.2 Sistema de alarma
Dentro del sistema de alarma de la línea My Home, se tienen tanto dispositivos de
detección de presencia no deseada (alarma intrusión), como de prevención de situación
riesgosa (alarma técnica), como sensores de movimiento, sensores de presencia, sensores
perimetrales, sensores de humo, entre otros. Además posee diferentes tipos de sirenas para
avisar de manera sonora la activación de la alarma, tanto sirenas exteriores, como
interiores. Todos los elementos del sistema de alarma son vistos como Comandos y como
Actuadores, solo que en la línea My Home, estos son conectados a un segundo bus de uso
exclusivo para la alarma. Esta situación hace que la subdivisión de los elementos de la
alarma ya no se haga por Ambientes, Puntos de Luz y Grupos, sino que se realiza por
medio de Zonas “Z” (que es el equivalente a “A” en el bus de automatización) y Número de
Elemento “N” (equivalente a “PL”), los cuales son espacios configurables por medio de los
mismos dispositivos explicados anteriormente.

82
Este bus usado para la alarma, a diferencia del bus de automatización general de la
residencia domótica, sí tiene un dispositivo que controla y lleva la cuenta del estado de cada
uno de los elementos de la alarma. Este dispositivo es llamado “La Central” y es
básicamente un controlador con pantalla y teclado que le permite al usuario llevar control
del estado de la alarma y de los elementos de la misma, así como poder activar y desactivar
Zonas de la alarma de manera manual. También se puede controlar La Central por medios
remotos de control IR.
La Central se conecta también directamente al bus de automatización general de la
casa, de manera que, aunque los elementos de la alarma no estén conectados a este bus,
también la Central pueda ejercer control sobre el encendido y apagado de algunas luces con
motivos de prevención o de aviso de intrusión.
Se integra dentro de La Central un comunicador telefónico, el cual es un dispositivo
con tarjeta SIM, que al activarse la alarma por algún motivo envía mensajes de voz a los
números telefónicos guardados dentro de La Central para informar al usuario de la
situación.
Existen también los “Parcializadores de Áreas”, que son puntos desde los cuales se
puede desactivar ciertas Zonas de la alarma sin tener que ir hasta La Central.
Otro dispositivo que se agrega para evitar ingresos de personas no deseadas al hogar
mientras el mismo está cerrado, son las “Tarjetas de Reconocimiento” y sus respectivos
“lectores”. Estas tarjetas básicamente son elementos en los cuales se carga cierta
información de manera magnética, las cuales se deslizan sobre su lector para poder ingresar
a la casa. En caso contrario, la casa permanecerá cerrada.

83
6.3 Sistema de Difusión Sonora
En este sistema se integra tanto los dispositivos de audio como las cámaras. Se
tienen diferentes interfaces, que son básicamente mezcladores de audio y video, que sirven
para conectar los elementos como amplificadores de audio, interruptores para encender o
apagar los dispositivos de audio conectados a la interfaz, reproductores de audio, cámaras
de video, pantallas táctiles, altavoces, intercomunicadores, entre otros. De esta manera se
pueden tener varios dispositivos conectados a las entradas de audio y de video y poder
elegir cuales van de ellos van a ser escuchados o vistos en las salidas. Estas interfaces son
conectadas al bus de automatización de la casa para poder controlar desde las mismas
también ciertos elementos como luminarias.
Esta conexión entre las interfaces de difusión sonora y el bus de automatización
general de la casa, permite la creación de escenarios más complejos, como por ejemplo, que
se tenga un una pantalla táctil de comando que permita la activación del escenario “Fiesta”,
el cual haría que se enciendan solo ciertas luces del patio de la casa a una cierta intensidad,
además de poner la música correspondiente a dicha situación en ese mismo lugar a una
intensidad de volumen dada.
6.4 Sistema de Termorregulación
Esta parte se compone de diferentes sensores de temperatura que actúan como
Comandos y los sistemas de aire acondicionado y/o sistemas de calefacción que se tengan
en la casa funcionando como las cargas que se quiere controlar (activar, desactivar o

84
regular), por lo que se les coloca una interfaz que funciona como Actuador sobre dichas
cargas. Además, se agrega un dispositivo encargado de llevar el control de la temperatura
general y por zonas en la casa, de poder modificar de manera individual la temperatura y de
mostrar esa información por medio de una pantalla, llamado Central de Termorregulación.
Los elementos del Sistema de Termorregulación se conectan al bus general de
automatización de la casa lo cual facilita la creación de escenarios complejos donde con un
solo Comando, además de controlarse la temperatura de un lugar, también se controla la
intensidad de la luminosidad, e inclusive, con lo expuesto anteriormente, se podría incluir
alguna condición específica en las salidas de audio y video.
También se incluye al hogar domótico de la línea My Home de Bticino, una
Pasarela Residencial para poder conectar el sistema domótico a Internet. De esta manera, se
le asigna una dirección IP a cada uno de los dispositivos del hogar domótico conectados al
bus de automatización, de manera que se puede tener la información del estado de cada uno
de los elementos vía internet.
Bticino ofrece una cuenta a cada uno de los usuarios que la deseen, para que dentro
de su página puedan ingresar a un software, que les permita controlar los elementos de su
hogar domótico vía Internet, con la excepción de los dispositivos de la alarma, los cuales,
por motivos de seguridad, no la integran a este software.
85
CAPÍTULO 7: Iluminación tipo LED [34] [35] [36]
De sus siglas en inglés, LED significa “diodo emisor de luz”, por lo que se trata de
un tipo de diodo semiconductor, que básicamente funciona bajo el concepto de conducir o
no conducir dependiendo de la tensión y la corriente que pueda circular a través de él, con
la salvedad de que al ocurrir conducción, también ejerce un efecto de luminosidad.
El primer LED fue presentado en 1962 y emitía una tenue luz roja, mientras que
actualmente se tienen LED que emiten alta luminosidad en el espectro visible, en el
infrarrojo (IRED) y en el ultravioleta. En la figura 7.1 se muestra una imagen de un LED,
acompañada por la simbología utilizada para el mismo.
Ilustración 38Figura 7.1. Diodo LED y su simbología [17]
Figura 7.1. Diodo LED y su simbología [34]
86
Dentro de las ventajas que tienen estos dispositivos en comparación a otras fuentes
artificiales de luminosidad, ya sean incandescentes o fluorescentes, es que los LEDs
presentan un consumo de energía mucho menor. De hecho, distintas pruebas que se han
realizado por importantes empresas y organismos, han concluido que el consumo
energético varía entre el 70% y el 80% menos respecto a ciertas fuentes de iluminación
tradicional como la incandescente. Otras ventajas que se tienen con la tecnología LED con
respecto a otras, es un mayor tiempo de vida, tamaño más pequeño, gran durabilidad,
resistencia a las vibraciones, no es frágil, reduce considerablemente la emisión de calor que
produce el efecto invernadero en nuestro planeta, no contienen mercurio, no crean campos
magnéticos de alta, como sí lo hace la tecnología de inducción magnética, con los cuales se
crea mayor radiación hacia el ser humano. También, como parte de las ventajas de la
iluminación LED se tiene que reduce de manera considerable las señales de ruido en las
líneas eléctricas, no se ven afectados con el encendido intermitente (pueden funcionar como
luces estroboscópicas sin ningún problema) y esto no reduce su vida promedio, entre otras
ventajas.
Las desventajas más grandes que tienen estos dispositivos en este momento es que
los LEDs con la potencia suficiente para la iluminación de interiores en la vivienda, son
relativamente caros y además requieren de disipadores de calor.
Para tener una mejor visión acerca del ahorro energético que se puede obtener por
medio de la iluminación del tipo LED se presenta la tabla 7.1 donde se presentan
características de una luminaria LED de 20W en comparación con una bombilla
incandescente de 100W, una lámpara de bajo consumo y una lámpara halógena.

87
Tabla 7.1 Visión comparativa entre una luminaria tipo LED de 20W y otros
sistemas de iluminación [36]
Tabla 1Tabla 7.1 Visión comparativa entre una luminaria tipo LED de 20W y otros sistemas de iluminación
Bombilla
incandescente
Lámpara de
Bajo consumo
Lámpara
halógena
Bombilla LED
Consumo real
con idéntica
eficiencia
energética
100W 40W 70W 20W
Consumo a la
hora (kWh)
0.100 0.04 0.070 0.02
Consumo
aproximado
durante 1
año(kW)
365.00 146.00 255.50 73.00
Consumo
eléctrico 1 año
33588.03 CRC 13435.212 CRC 23514.688 CRC 6717.606 CRC
Vida luminaria 1000 horas 3000 horas 3000 horas Alrededor de
40000 horas
7.1 Funcionamiento del diodo LED [35] [38]
Cuando el diodo está polarizado inversamente o no hay polarización alguna, no hay
inyección de portadores minoritarios. En cualquier unión p-n con polarización directa existe
dentro de la estructura del diodo LED y principalmente cerca de la unión, una
recombinación de huecos y electrones. Esta recombinación requiere que la energía poseída
por el electrón libre sin enlace sea transferida hacia otro estado. En todas las uniones de
semiconductores p-n cierta cantidad de energía será desprendida en forma de calor y otra en
forma de fotones. En el caso del silicio y del germanio, la mayoría de la energía se

88
desprende en forma de calor y una cantidad insignificante en forma de fotones (por eso el
ojo humano no detecta luminosidad a partir de los diodos convencionales). Sin embargo en
otros materiales, como el Arsenuro de Galio (GaAsP) o el Fosfuro de Galio (GaP), la
mayoría de la energía es liberada en forma de fotones, de manera que el ojo humano puede
distinguir dicha fuente de luminosidad.
En la imagen 7.2 se muestra el funcionamiento descrito del LED, donde se puede
apreciar al diodo polarizado directamente y la recombinación de cargas, la cual provoca la
radiación luminosa.
Ilustración 39Figura 7.2. Funcionamiento del LED [18]
Figura 7.2. Funcionamiento del LED [35]
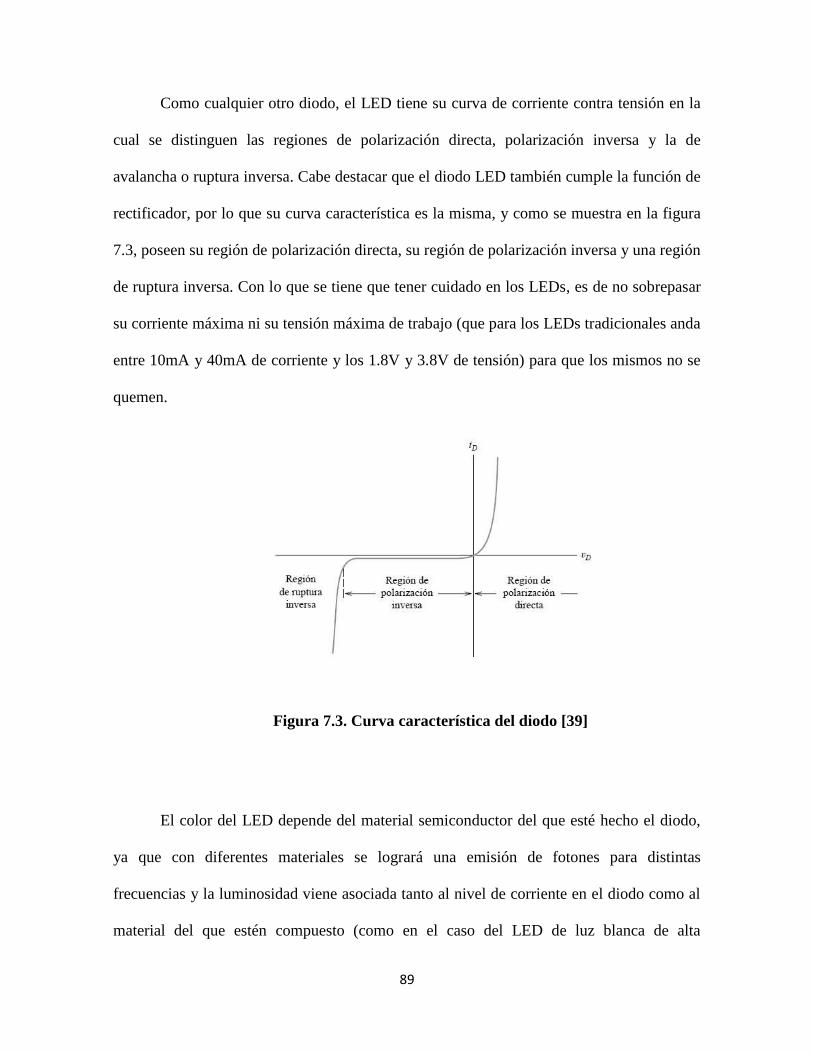
89
Como cualquier otro diodo, el LED tiene su curva de corriente contra tensión en la
cual se distinguen las regiones de polarización directa, polarización inversa y la de
avalancha o ruptura inversa. Cabe destacar que el diodo LED también cumple la función de
rectificador, por lo que su curva característica es la misma, y como se muestra en la figura
7.3, poseen su región de polarización directa, su región de polarización inversa y una región
de ruptura inversa. Con lo que se tiene que tener cuidado en los LEDs, es de no sobrepasar
su corriente máxima ni su tensión máxima de trabajo (que para los LEDs tradicionales anda
entre 10mA y 40mA de corriente y los 1.8V y 3.8V de tensión) para que los mismos no se
quemen.
Ilustración 40Figura 7.3. Curva característica del diodo [19]
Figura 7.3. Curva característica del diodo [39]
El color del LED depende del material semiconductor del que esté hecho el diodo,
ya que con diferentes materiales se logrará una emisión de fotones para distintas
frecuencias y la luminosidad viene asociada tanto al nivel de corriente en el diodo como al
material del que estén compuesto (como en el caso del LED de luz blanca de alta

90
luminosidad, que es por mucho, el más usado con propósito de iluminación de exteriores e
interiores de viviendas). A continuación se presenta una tabla en la cual se muestran las
longitudes de onda para algunos de los materiales más comunes en la construcción de
LEDs.
Tabla 2Tabla7.2 Materiales Semiconductores para LED y su longitud de onda
Material Longitud de onda (nm)
Germanio 1880 (infrarrojo)
Silicio 1140 (infrarrojo)
GaAs 870 (infrarrojo)
GaP 560 (verde)
GaAs60P40 650 (rojo)
AlSb 775 (rojo)
Algunas técnicas que se realizan para tener la máxima eficiencia de conversión de
energía eléctrica a energía luminosa en los LED, como parte de su estructura física
comercial (no precisamente de los materiales semiconductores sino del material que los
recubren), son las siguientes:
1. Utilizar los materiales menos absorbentes y de alto rendimiento directo con
cristales lo menos defectuosos posible. Esto para que los fotones no se
pierdan en el sistema, atrapados en los defectos del cristal.

91
2. Colocar lentes con índices de refracción lo más próximos posible al del
material del LED, de manera que se refleje la menor intensidad lumínica
hacia el interior cuando atraviesan la interfaz LED-aire. Se busca tener la
menor pérdida debido a reflexión interna, de manera que como se muestra en
la figura 7.4, se tienen lentes tanto planas como planoconvexos y en estos
distintos casos se logran diferentes índices de reflexión interna.
La mayoría de los LEDs tienen un encapsulado comercial de plástico con una lente
directamente sobre la unión p-n. No todos los fotones generados por la unión salen de la
superficie del LED, debido a los siguientes 3 motivos:
a. Pérdidas debidas a los materiales de construcción del semiconductor, o sea, cuanta
cantidad de la energía producida se convierte finalmente en fotones (por ejemplo,
GaAsP/GaAs η=0.15, GaAsP/GaP η=0.76).
b. Pérdidas FRESNEL (en dos elementos con diferente índice de refracción una parte
de la radiación se refleja).
c. Pérdidas por ángulo crítico.
En la figura 7.4 se muestra la forma en que se refracta la luz en los distintos tipos de
encapsulado (de izquierda a derecha se aprecia sin encapsulado, con encapsulado plano y
con encapsulado plano convexo). Como se puede apreciar, el ángulo de refracción de cada
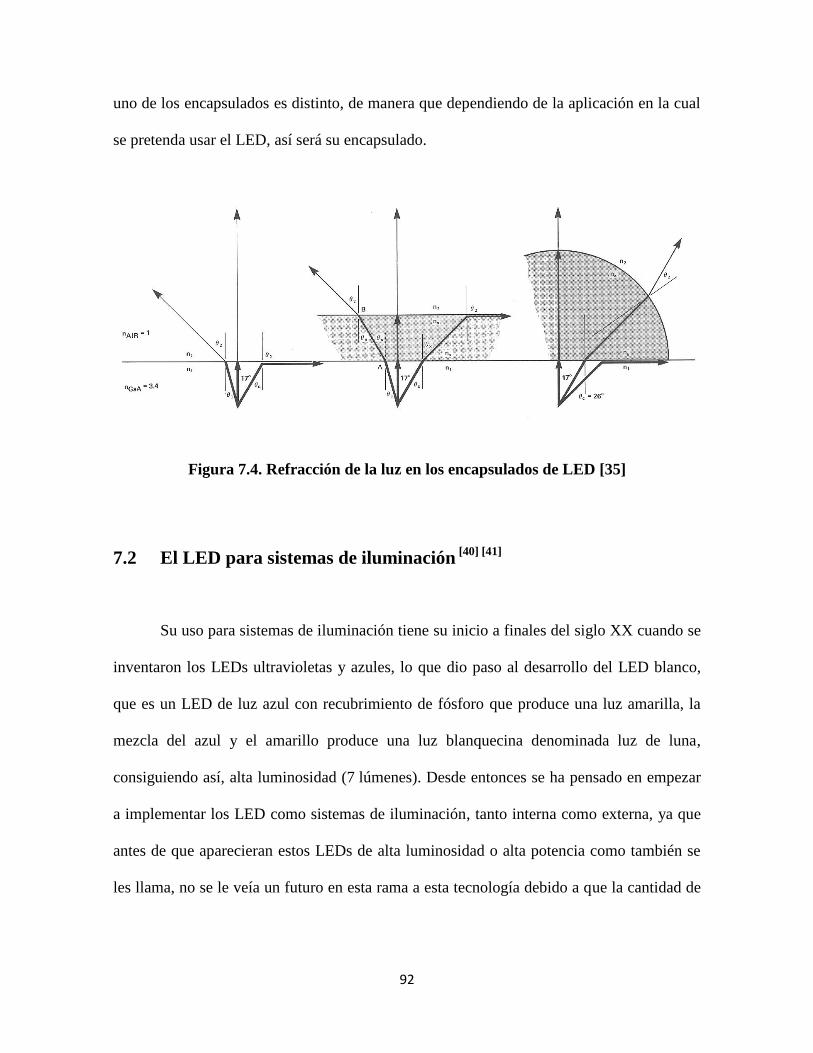
92
uno de los encapsulados es distinto, de manera que dependiendo de la aplicación en la cual
se pretenda usar el LED, así será su encapsulado.
Ilustración 41Figura 7.4. Refracción de la luz en los encapsulados de LED [18]
Figura 7.4. Refracción de la luz en los encapsulados de LED [35]
7.2 El LED para sistemas de iluminación [40] [41]
Su uso para sistemas de iluminación tiene su inicio a finales del siglo XX cuando se
inventaron los LEDs ultravioletas y azules, lo que dio paso al desarrollo del LED blanco,
que es un LED de luz azul con recubrimiento de fósforo que produce una luz amarilla, la
mezcla del azul y el amarillo produce una luz blanquecina denominada luz de luna,
consiguiendo así, alta luminosidad (7 lúmenes). Desde entonces se ha pensado en empezar
a implementar los LED como sistemas de iluminación, tanto interna como externa, ya que
antes de que aparecieran estos LEDs de alta luminosidad o alta potencia como también se
les llama, no se le veía un futuro en esta rama a esta tecnología debido a que la cantidad de

93
lúmenes que podían emitir era muy pequeña en comparación con los sistemas de
iluminación existentes (aproximadamente 5 lúmenes o menos).
En la actualidad para aplicaciones de iluminación se han desarrollado LED de alta
luminosidad que alcanzan con tan solo 1 Watt de potencia consumida (aunque también
existen actualmente de 3, 5, 10, 20 y 30Watts) un flujo luminoso de 55 lúmenes e inclusive
mayor. Dentro de las características que presentan estas luminarias de 1Watt se tiene que
las mismas tienen una vida promedio de 50,000 horas, tienen una eficiencia de 55 lúmenes
por Watt, proporcionando un mantenimiento del flujo luminoso de 75%; además funcionan
a un voltaje de operación de entre 3 y 4V DC, en el cual su corriente de operación es de
350 mA; presentan bajas pérdidas por disipación de calor y una mínima emisión de
radiaciones infrarrojas y ultravioletas. Estas luminarias se fabrican en colores blanco, azul y
verde fabricados de Nitruro de Galio e Indio (InGaN) y en colores ámbar y rojo fabricados
de Fosfuro de Galio, Indio y Aluminio (AllGaP).
En la figura a continuación se muestra un LED de alta luminosidad utilizado para
sistemas de iluminación.
Ilustración 42Figura 7.5. LED de alta luminosidad utilizado para sistemas de iluminación [20]
Figura 7.5. LED de alta luminosidad utilizado para sistemas de iluminación
[42]
94
Un diodo emisor de luz de alta potencia de 1 W se integra de los siguientes
componentes:
Semiconductor emisor del flujo luminoso con terminales exteriores para
alimentación del cátodo (+) y ánodo (-).
Encapsulado de silicón que cubre al semiconductor emisor.
Base con superficie inferior disipadora de temperatura.
Óptica primaria integrada por lente semiesférica envolvente de resina termoplástica
transparente.
Óptica secundaria integrada con diversas opciones en cuanto a tipo de lentes
concentradoras del flujo luminoso.
En la figura 7.6 se muestra diferentes tipos de lentes de ópticas secundarias
utilizados comercialmente para la aplicación de sistemas de iluminación.
95
Ilustración 43Figura 7.6. Diferentes tipos de lentes de ópticas secundarias utilizados comercialmente para la aplicación de sistemas de iluminación [21]
Figura 7.6. Diferentes tipos de lentes de ópticas secundarias utilizados
comercialmente para la aplicación de sistemas de iluminación [21]
Es preciso mencionar que, dependiendo de las características de estos lentes, se
puede tener una mejor distribución de la luz, haciendo uso de superficies reflectoras que
produzcan este efecto en diferentes direcciones y así distribuyendo el flujo luminoso de
mejor manera para la iluminación de interiores o exteriores. Es aquí donde puede variar el
diseño de las luminarias como tales, dependiendo de su uso, ya que se pueden hacer con
intención de iluminación artística de exteriores en diferentes colores, y con diferentes
intensidades luminosas, simplemente con utilizar LEDs de alta luminosidad en otros
colores y lentes reflectores que ayuden a la distribución de la luz, mientras que para usos
residenciales se suelen utilizar en su mayoría similares a las mostradas en la figura 7.6.
96
Dentro de las características de las lentes de estas luminarias, se tiene que las
mismas se fabrican para lograr ángulo de apertura del haz luminoso de 120° sin óptica
secundaria, y ángulos de apertura del haz luminoso de 5-15 ° (cerrados), 20-40° (medios) y
de 40-60° (abiertos) con ópticas secundarias.
Como bien se conoce, un diodo LED está hecho para funcionar iluminando de
manera continua en corriente directa, por lo tanto, debido a que la corriente que se utiliza en
las casa de habitación en instalaciones eléctricas es de naturaleza alterna, los diodos LED
no se puede conectar directamente como se hace con un bombillo incandescente en un
plafón. Es necesario que los LED que estén en la luminaria tengan en sus terminales
corriente directa, por lo tanto, deben pasar por un sistema de rectificación de la corriente
alterna. Existen varias maneras de hacer esto posible, por ejemplo, si se trata de una
instalación domótica, crear una fuente de corriente directa de potencia tal que pueda
alimentar a todas las luminarias de la casa, y enviar a los actuadores que controlan las
luminarias, directamente esta tensión DC para controlar las mismas es una opción. Otra
forma, que de hecho es la más común, es que cada luminaria tenga su propio circuito de
rectificación, de manera que se pueda conectar la luminaria como tal a una terminal de
120V ó 240V AC.
Dentro de los sistemas de iluminación LED residenciales existen distintas
tendencias, distintos modelos y una gran cantidad de fabricantes que se dedican a
producirlos y distribuirlos. Se destaca a la marca Schneider Electric como fabricante líder
de sistemas de iluminación LED.

97
Como parte de los productos de iluminación tipo LED que esta empresa ofrece, se
destacan las luminarias tipo empotradas debido a su gran campo de aplicación en
residencias. Se colocan generalmente en los cielorrasos de las viviendas de manera
empotrada. Proporcionan un nivel estético muy alto y en su mayoría disponen de
dispositivos mecánicos para poder dirigir los puntos de luminosidad del las mismas. Dentro
de esta gama de luminarias se tienen los empotrados 2’x2’ que se muestran en la figura 7.7,
los empotrados 600lm (mostrados en la figura 7.8) y los mini empotrados que se observan
en la figura 7.9, entre otros.
Ilustración 44Figura 7.7. Luminaria tipo LED empotrada 2’x2’ marca Schneider [22]
Figura 7.7. Luminaria tipo LED empotrada 2’x2’ marca Schneider [22]
Ilustración 45Figura 7.8. Luminaria tipo LED empotrada 600lm marca Schneider [22]
Figura 7.8. Luminaria tipo LED empotrada 600lm marca Schneider [22]

98
Ilustración 46Figura 7.9. Luminaria tipo LED mini empotrada marca Schneider [22]
Figura 7.9. Luminaria tipo LED mini empotrada marca Schneider [22]
Dentro de las características técnicas generales de estas luminarias, las mismas
tienen un promedio de vida útil de 50.000 horas, con una expectativa de uso comercial de 8
a 12 años. Los consumos de potencia van desde los 5W en los mini empotrados (ejerciendo
una luminosidad equivalente a 20W en luminarias convencionales de tipo incandescente)
hasta los 52W en los empotrados 2’x2’ (teniendo niveles de luminosidad de hasta 3800
lúmenes).
En su mayoría son de aplicación en interiores de residencias, aunque también se
tienen algunas luminarias empotradas para exteriores como el modelo “Performance Step
LED”, que se muestra en la figura 7.10. Este tipo de luminaria posee un dispositivo
reflector que produce iluminación difusa y minimiza el brillo. Además, bajo un consumo de
13W produce una luminosidad de 300 lúmenes y posee una estructura de aluminio que la
protege de lugares húmedos.

99
Ilustración 4751Figura 7.10. Luminaria tipo LED modelo Performance Step LED marca Schneider [22]
48Figura 7.10. Luminaria tipo LED modelo Performance Step LED marca Schneider
[22]
100
CAPÍTULO 8: Propuesta de diseño domótico
Basándose en la información obtenida en los capítulos anteriores, se procede a
diseñar un sistema de domótica práctico y económico, empezando por aspectos generales
hasta llegar a los aspectos más específicos como el diseño en sí del controlador y de los
circuitos periféricos al mismo.
La propuesta se basa en un sistema centralizado, en el cual, como controlador se
utilizará un microcontrolador Arduino, por lo que se procederán primeramente a explicar
algunos aspectos importantes relacionados con el mismo.
8.1 Aspectos generales acerca del Arduino [43] [44] [45]
El Arduino es una plataforma de electrónica abierta para la creación de prototipos
basada en software y hardware flexibles y fáciles de usar. El mismo, toma información del
entorno a través de sus múltiples pines de entrada de toda una gama de sensores y puede
ejercer control sobre elementos los electrónicos le rodean como luces, motores y otros
actuadores. He aquí su importancia para la propuesta de control domótico en el presente
proyecto, donde los comandos (sean éstos interruptores o sensores) enviarán señales hacia
el mismo, las cuales tendrá que procesar y emitir a los actuadores. El reto consiste en
codificar de manera correcta cada uno de los comandos y los actuadores de manera que los
mismos puedan representar información pueda el Arduino procesar.
101
Se programa usando el Arduino Programming Language (basado en Wiring, el cual
también es un entorno de programación abierta, con aplicación directa a la creación y
exploración de prototipos electrónicos y el control de hardware en general) y el Arduino
Development Environment (basado en Processing, el cual es un lenguaje de programación y
entorno de desarrollo integrado de código abierto). Los proyectos de Arduino pueden ser
autónomos o se pueden comunicar con software en ejecución en un ordenador (por ejemplo
con Flash, Processing, MaxMSP, LabView, etc.). Propiamente, el lenguaje mencionado
para las aplicaciones Arduino se conoce como lenguaje de Programación Arduino, nombre
asignado por sus creadores Massimo Banzi, David Cuartielle, Tom Igoe, Gianluca Martino
y David Mallis.
Dentro de las ventajas generales del Arduino es que el mismo puede programarse
desde los diferentes sistemas operativos Windows, Macintosh OSX y GNU/Linux.
Además, se trata de un micro controlador cuyo precio es bastante accesible, lo cual es
bastante conveniente para la creación de proyectos varios.
El entorno de programación de Arduino es fácil de usar para principiantes, pero
suficientemente flexible para que usuarios avanzados puedan aprovecharlo también. El
lenguaje puede ser expandido mediante librerías C++.
En la figura a continuación se muestra un diagrama de bloques esencial de una placa
Arduino:

102
Ilustración 49Figura 8.1. Diagrama de bloques sencillo de una placa Arduino [23]
Figura 8.1. Diagrama de bloques sencillo de una placa Arduino [43]
Como se puede apreciar en la anterior figura, se trata de varios circuitos sencillos
alrededor del procesador ATmega, de los cuales se puede distinguir una fuente con un
regulador de tensión después de la entrada VCC, un circuito de “reset” con una resistencia
de “pull-up”, además de un cristal oscilador de hasta 20MHz y buses de diferentes entradas
y salidas analógicas y digitales así como ICSP.
8.1.1 Modelos Arduino
Desde su primera aparición en el mercado, Arduino ha sacado múltiples versiones
de la placa. La mayoría usan el ATmega168 de Atmel, mientras que las placas más antiguas
usan el ATmega8. Algunos modelos que ha desarrollado Arduino son los siguientes:

103
Arduino Diecimila: Fue el lanzamiento que antecedió la estructura básica USB.
Tiene un microcontrolador ATmega168, 14 pines de entrada/salida digital (de los cuales 6
pueden ser usados como salidas PWM), 6 entradas analógicas y un oscilador de cuarzo a
16MHz. En su momento presento la novedad de poder ser reiniciada desde la computadora.
Arduino Nano: Se trata de una placa compacta diseñada para uso como tabla de
pruebas, el Nano se conecta al ordenador usando un cable USB Mini-B. Hace uso del micro
controlador ATmega328 o el ATmega168 (para la versión 2.x) sin embargo no presenta
capacidad para conexión de alimentación externa.
Arduino Bluetooth: Denominado también Arduino BT, contiene un módulo
Bluetooth que permite comunicación y programación sin cables (incorpora un módulo para
la transmisión de datos de hasta 100 metros). Es configurable mediante el puerto serie del
ATmega168.
Arduino LilyPad: Ha sido diseñada para aplicaciones listas para llevar. Esta placa
puede ser conectada en fábrica, y ha sido creada con el propósito de ser colocada en ropa y
textiles en general. Utiliza en microcontrolador ATmega168V. Sus creadores fueron Leah
Buechley y SparkFun Electronics.
Arduino Mini: Es la placa más pequeña de Arduino. Trabaja bien en tabla de
pruebas o para aplicaciones en las que el espacio disponible es muy pequeño. Se conecta al
ordenador usando el cable Mini USB.

104
Arduino Serial: Es una placa básica que usa RS232 como un interfaz con el
ordenador para programación y comunicación.
Arduino Serial Single Sided: Esta placa está diseñada para ser grabada y
ensamblada a mano. Es ligeramente más grande que la Diecimila, pero aun compatible con
los dispositivos.
Arduino Duemilanove: Hace alusión a su capacidad de trabajar sin estar,
necesariamente, conectada a una computadora. Además se le es posible manejar elementos
Flash, MaxMSP. Está basada en el ATmega168 o el ATmega328 además de que tiene 14
pines con entradas/salidas digitales (6 de las cuales pueden ser usadas como salidas PWM),
6 entradas analógicas, un cristal oscilador a 16Mhz, conexión USB, entrada de
alimentación, una cabecera ISCP y un botón de reset.
Arduino Uno: Es la placa estándar y posiblemente la más conocida y documentada.
Salió al mercado en el 2010 sustituyendo al Arduino Duemilanove, ya que es básicamente
el mismo microcontrolador con varias mejoras de hardware que consisten básicamente en el
uso de un USB HID propio en lugar de utilizar un conversor FTDI para la conexión USB.
Viene con un Atmega328 y con 32kbytes de ROM para el programa.
Arduino Mega: Se trata de una placa microcontrolador basada ATmeg1280. Tiene
54 entradas/salidas digitales (de las cuales 14 proporcionan salida PWM), 16 entradas
digitales, 4 UARTS (puertos serie por hardware), un cristal oscilador de 16MHz, conexión

105
USB, entrada de corriente, conector ICSP y botón de reset. El Mega es compatible con la
mayoría de Shields diseñados para el Arduino Duemilanove o Diecimila.
En la figura 8.2 se presenta la forma física de este modelo, y en la tabla 8.1, un
resumen con las características más importantes del Arduino Mega.
Ilustración 50Figura 8.2. Placa de microcontrolador Arduino Mega [24]
Figura 8.2. Placa de microcontrolador Arduino Mega [44]
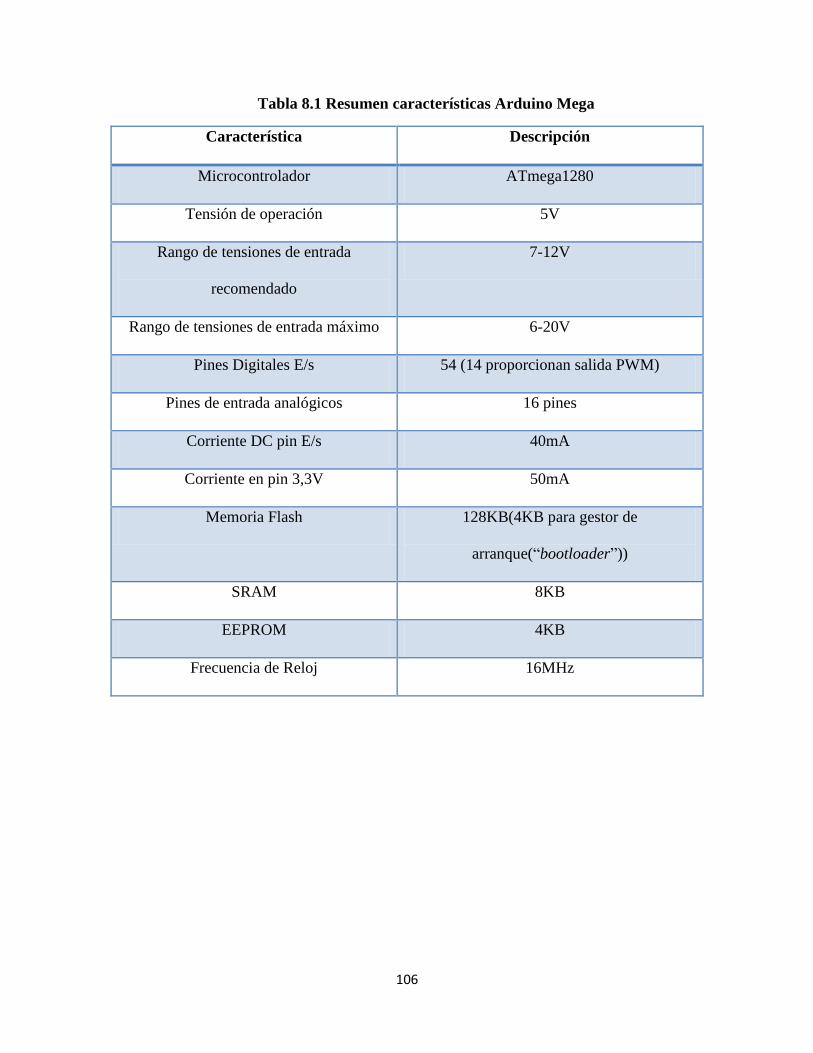
106
Tabla 3 Tabla 8.1 Resumen características Arduino Mega
Característica Descripción
Microcontrolador ATmega1280
Tensión de operación 5V
Rango de tensiones de entrada
recomendado
7-12V
Rango de tensiones de entrada máximo 6-20V
Pines Digitales E/s 54 (14 proporcionan salida PWM)
Pines de entrada analógicos 16 pines
Corriente DC pin E/s 40mA
Corriente en pin 3,3V 50mA
Memoria Flash 128KB(4KB para gestor de
arranque(“bootloader”))
SRAM 8KB
EEPROM 4KB
Frecuencia de Reloj 16MHz
107
Características Arduino Mega
Alimentación.
Puede ser alimentado vía la conexión USB o con una fuente de alimentación
externa. El origen de la alimentación lo selecciona el usuario y es identificado
automáticamente. Las fuentes de alimentación externas (no-USB) pueden ser tanto un
transformador o una batería. El transformador se puede conectar usando un conector macho
de 2.1mm con centro positivo en el conector hembra de la placa. Los cables de la batería
pueden conectarse a los pines “Gnd” y “Vin” en los conectores de alimentación.
La placa es capaz de trabajar con una alimentación externa de entre 6 a 20 voltios,
sin embargo, para asegurar el perfecto funcionamiento de la placa (que no se sobrecaliente
o que el funcionamiento de la misma no se vuelva inestable) es recomendado trabajar en el
rango de los 7 a 12 voltios.
Los pines de alimentación son los siguientes:
VIN: La entrada de voltaje a la placa Arduino cuando se está usando una fuente
externa de alimentación. Se puede proporcionar voltaje a través de este pin, o, si
se está alimentado a través de la conexión de 2.1mm, acceder a ella a través de
este pin.
5V: La fuente de voltaje estabilizado usado para alimentar el microcontrolador y
otros componentes de la placa. Puede provenir de VIN a través de un regulador

108
integrado en la placa, o ser proporcionada directamente por el USB o cualquier
otra fuente estabilizada de 5V.
3V3. Una fuente de voltaje a 3.3V generada en el chip FTDI integrado en la
placa. La corriente máxima soportada en este caso es de 50mA.
GND. Pines de toma de tierra.
Memoria
El ATmega1280 tiene 128KB de memoria flash para almacenar código (4KB de los
cuales son usados para el arranque del sistema). Tiene 8 KB de memoria SRAM y 4KB de
EEPROM, que puede a la cual se puede acceder para leer o escribir.
Entradas y Salidas
Cada uno de los 54 pines digitales en el Arduino puede utilizarse como entrada o
como salida definiéndolo el usuario así dentro del programa. Las entradas o salidas operan
a 5 voltios. Cada pin puede proporcionar o recibir una intensidad máxima de 40mA y tiene
una resistencia interna entre 20kΩ y 50kΩ. Además, algunos pines tienen funciones
especializadas:
Serie: Usados para recibir (RX) y transmitir (TX) datos a través de puerto serie
TTL.
109
Interrupciones Externas: Básicamente son pines para interrupciones, que se
pueden configurar para lanzar una interrupción en un valor en bajo de la señal,
en flancos de subida o bajada, o en cambios de valor.
PWM: Proporciona una salida PWM de 8 bits de resolución (valores de 0 a
255).
SPI: Integrados para trabajar con información serial sincrónica, proporcionan
comunicación SPI, que a pesar de que el hardware la proporcione actualmente
no está incluido en el lenguaje Arduino.
LED: Hay un LED integrado en la placa conectado al pin digital 13, cuando este
pin tiene un valor digital en alto el LED se enciende y cuando este tiene un valor
digital en bajo este se apaga.
Entradas Analógicas Tiene 16 entradas analógicas, y cada una de ellas
proporciona una resolución de 10bits (1024 valores). Por defecto se mide de
tierra a 5V, aunque es posible cambiar la cota superior de este rango usando el
pin AREF.
I2C: pines 20 (SDA) y 21 (SCL). Soporte del protocolo de comunicaciones I
2C

110
AREF: Voltaje de referencia para las entradas analógicas.
Reset: entrada para reiniciar el microcontrolador. Típicamente usado para añadir
un botón de reset a los shields que no dejan acceso a este botón en la placa.
El Arduino Mega facilita la comunicación con el ordenador, otros Arduinos u otros
microcontroladores de otras marcas. El microcontrolador ATmega1280 proporciona cuatro
puertos de comunicación vía serie UART TTL. Además, posee un chip FTDI FT232RL
integrado en la placa, el cual, canaliza esta comunicación serie a través del puerto USB y
los drivers FTDI (que se incluyen en el software de Arduino) proporcionan un puerto serie
virtual en el ordenador. Aparte de lo ya mencionado, también el software contiene un
monitor de puerto serie que permite enviar y recibir información de manera textual de la
placa Arduino. Los LEDs llamados RX y TX de la placa, parpadean una vez que se detecta
comunicación transmitida través del chip FTDI y la conexión USB (no parpadearan si se
usa la comunicación serie a través de los pines 0 y 1).
8.1.2 Programación Arduino
Como ya se ha mencionado anteriormente, el lenguaje de programación para el
Arduino se basa en Wiring, mientras que el entorno del mismo se basa en Procesing.

111
El Arduino Mega se puede programar con el software Arduino. El ATmega1280 en
el Arduino Mega viene precargado con un gestor de arranque que permite cargar un nuevo
código sin necesidad de un programador por hardware externo.
También se puede saltar el gestor de arranque y programar directamente el
microcontrolador a través del puerto ISCP.
Se puede observar en la figura 8.3, el entorno que es utilizado para programar el
Arduino.
Ilustración 51Figura 8.3. Entorno de programación para Arduino
Figura 8.3. Entorno de programación para Arduino
En esta figura se puede ver un programa sencillo en el que se lee una entrada
análoga del Arduino y presenta el resultado en el monitor serial. Se puede apreciar que el
112
entorno de programación del Arduino tiene una barra de herramientas con siete botones los
cuales de izquierda a derecha hacen respectivamente lo siguiente: el primero es para
realizar la compilación del programa para ver si existen posibles errores en el programa
realizado, el segundo es para detener la ejecución de cualquier proceso en curso. Luego el
tercero es para crear una hoja nueva de trabajo y para abrir y cerrar hojas de trabajo
existentes se tienen el cuarto y quinto botón, mientras que para subir el programa a la placa
Arduino se tiene el sexto botón. El séptimo botón se utiliza para iniciar la monitorización
serie del programa.
Librerías
La placa Arduino tiene varias librerías predeterminadas con la intención de dar
mucha más flexibilidad al programa. De hecho, una de las funciones de estas librerías es
darle al Arduino la posibilidad de manejar hardware externo o trabajar con datos.
Para poder hacer uso de una librería se debe importar dentro del entorno de
programación yendo a la opción Sketch y luego importar librería.
A continuación se muestran algunos ejemplos de librerías comunes para su uso en la
implementación del programa.
SoftwareSerial: permite comunicación serie por cualquier par de pines digitales
del Arduino Mega.
Servo: para el control de servomotores.
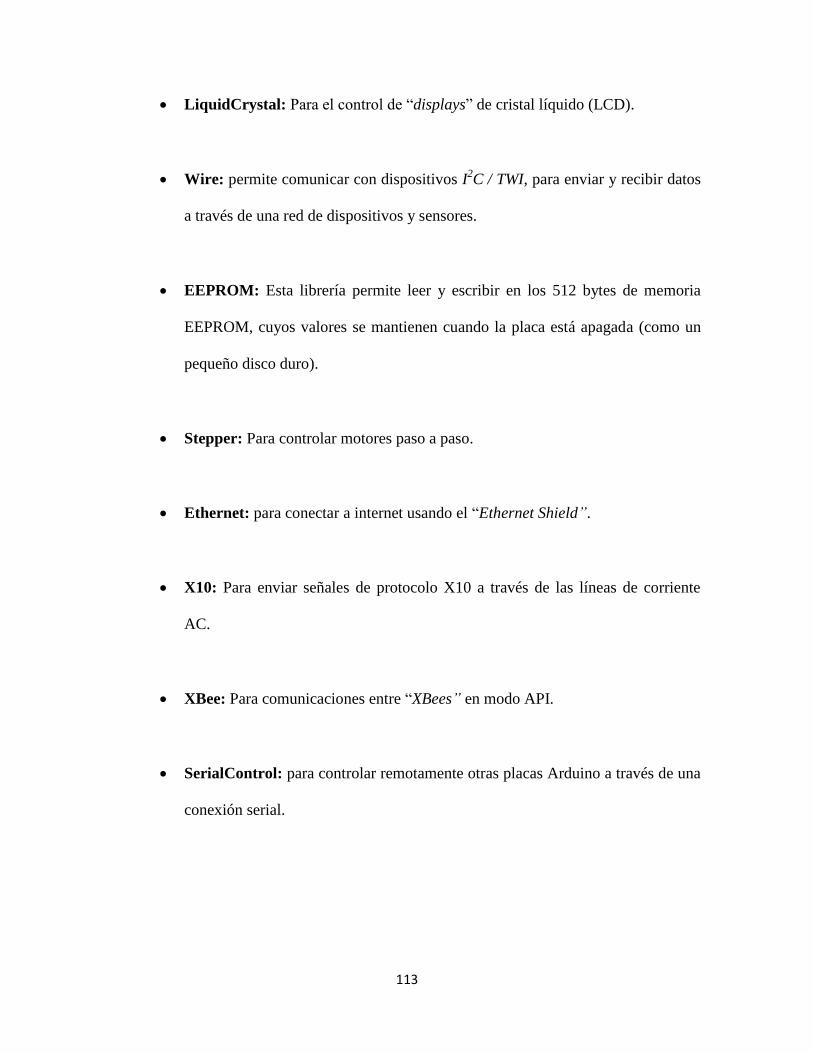
113
LiquidCrystal: Para el control de “displays” de cristal líquido (LCD).
Wire: permite comunicar con dispositivos I2C / TWI, para enviar y recibir datos
a través de una red de dispositivos y sensores.
EEPROM: Esta librería permite leer y escribir en los 512 bytes de memoria
EEPROM, cuyos valores se mantienen cuando la placa está apagada (como un
pequeño disco duro).
Stepper: Para controlar motores paso a paso.
Ethernet: para conectar a internet usando el “Ethernet Shield”.
X10: Para enviar señales de protocolo X10 a través de las líneas de corriente
AC.
XBee: Para comunicaciones entre “XBees” en modo API.
SerialControl: para controlar remotamente otras placas Arduino a través de una
conexión serial.

114
8.2 Aspectos generales del sistema domótico
Volviendo a la propuesta de diseño del sistema domótico, en la red de control, se
utilizará una topología tipo bus y una arquitectura centralizada, usando para esto dos buses:
uno para los que se llamarán Comandos (interruptores, dimmers, sensores) y otro para los
Actuadores. Además, como se ha mencionado en capítulos anteriores, el circuito de control
se diseñará con un microcontrolador Arduino Mega. Se consideró que el aspecto de mayor
importancia dentro de un sistema domótico de topología bus es el reconocimiento de
direcciones por parte de los elementos varios dentro del sistema, por lo tanto se procedió a
proponer un control basado en este aspecto
Debido a lo expuesto en el capítulo 4 acerca de las alarmas inteligentes, el
funcionamiento actuador-sensor es similar al de los demás elementos de una instalación
domótica, así que se incluirá a la alarma dentro de la red de control, y los dispositivos
varios de la misma se verán como comandos y actuadores.
A manera de una primera aproximación, se presenta los siguientes diagramas de
bloques en los que se ilustra a groso modo el sistema que se busca diseñar.
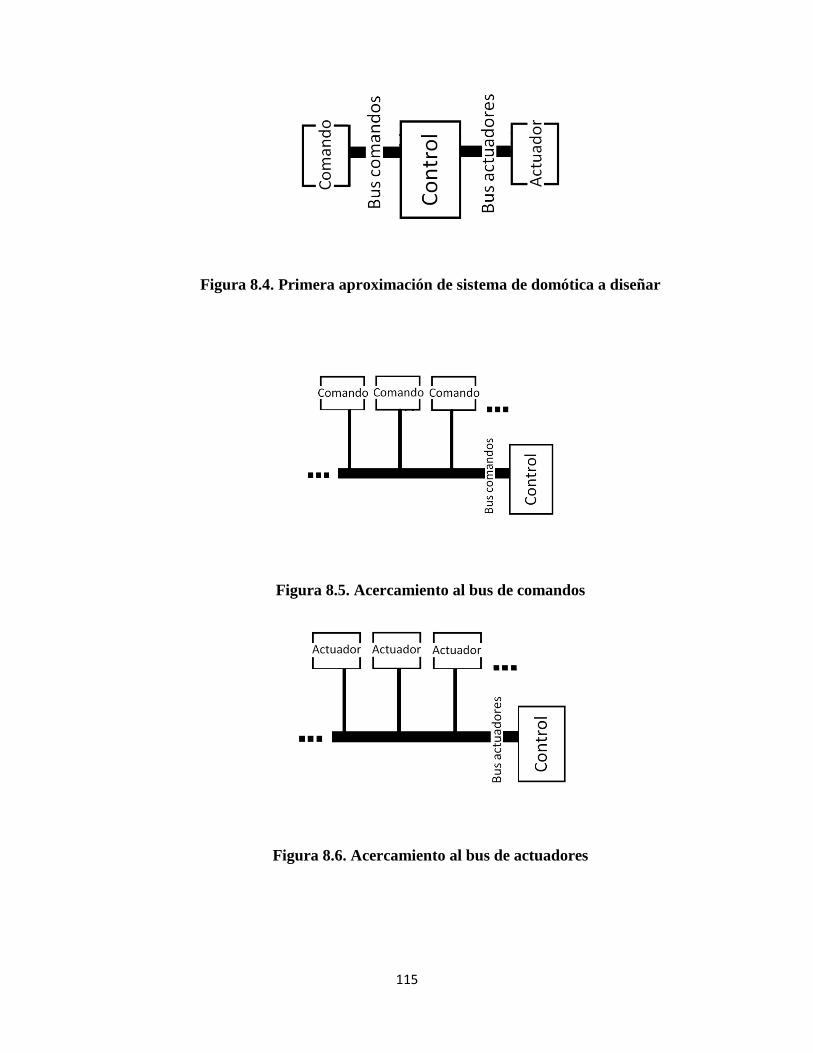
115
Ilustración 52Figura 8.4. Primera aproximación de sistema de domótica a diseñar
Figura 8.4. Primera aproximación de sistema de domótica a diseñar
Ilustración 53Figura 8.5. Acercamiento al bus de comandos
Figura 8.5. Acercamiento al bus de comandos
Ilustración 54Figura 8.6. Acercamiento al bus de actuadores
Figura 8.6. Acercamiento al bus de actuadores
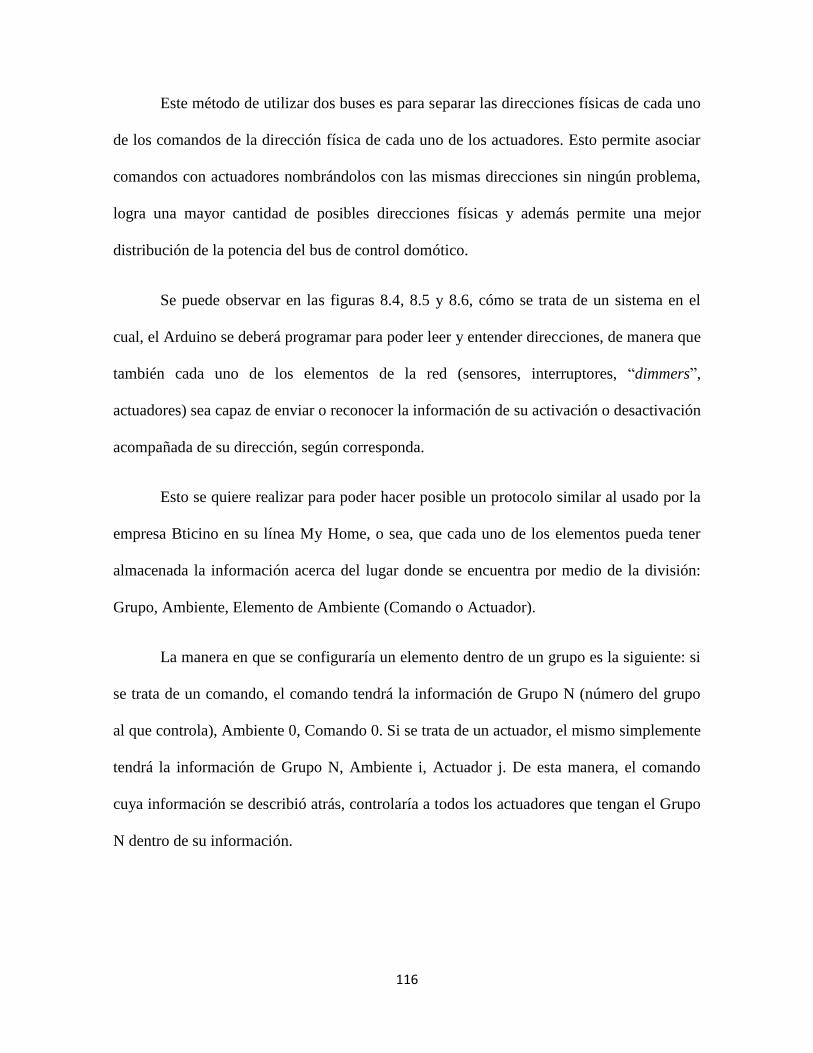
116
Este método de utilizar dos buses es para separar las direcciones físicas de cada uno
de los comandos de la dirección física de cada uno de los actuadores. Esto permite asociar
comandos con actuadores nombrándolos con las mismas direcciones sin ningún problema,
logra una mayor cantidad de posibles direcciones físicas y además permite una mejor
distribución de la potencia del bus de control domótico.
Se puede observar en las figuras 8.4, 8.5 y 8.6, cómo se trata de un sistema en el
cual, el Arduino se deberá programar para poder leer y entender direcciones, de manera que
también cada uno de los elementos de la red (sensores, interruptores, “dimmers”,
actuadores) sea capaz de enviar o reconocer la información de su activación o desactivación
acompañada de su dirección, según corresponda.
Esto se quiere realizar para poder hacer posible un protocolo similar al usado por la
empresa Bticino en su línea My Home, o sea, que cada uno de los elementos pueda tener
almacenada la información acerca del lugar donde se encuentra por medio de la división:
Grupo, Ambiente, Elemento de Ambiente (Comando o Actuador).
La manera en que se configuraría un elemento dentro de un grupo es la siguiente: si
se trata de un comando, el comando tendrá la información de Grupo N (número del grupo
al que controla), Ambiente 0, Comando 0. Si se trata de un actuador, el mismo simplemente
tendrá la información de Grupo N, Ambiente i, Actuador j. De esta manera, el comando
cuya información se describió atrás, controlaría a todos los actuadores que tengan el Grupo
N dentro de su información.
117
Ahora bien, no todos los elementos de la instalación tienen que ser parte de algún
grupo, así que, a manera de normalización, si algún elemento presenta en la parte de grupo
un 0, querrá decir que el mismo no pertenece a ningún grupo dentro de la vivienda.
Una aplicación que se le puede dar a este sistema donde la dirección de cada
elemento es descrita por Grupo (G), Ambiente (A), Elemento de Ambiente (E), es que, por
ejemplo, se pueden tener cuantos interruptores se quieran tener para poder controlar una
misma luminaria, si todos los interruptores tienen la misma información de ubicación, o
sea, todos los interruptores cuya información sea Grupo 0, Ambiente 1, Comando 2,
controlarían al actuador cuya información sea Grupo X, Ambiente 1, Controlador 2, donde
X podría ser cualquier número. A esta forma de actuar del sistema donde uno o varios
comandos pueden controlar un solo actuador, se le suele llamar conexión punto a punto, la
cual no difiere en mucho de la funcionalidad de un sistema de interruptor sencillo, un
“three way” o un “four way” para una luminaria (con la clara ventaja del ahorro de
cableado).
Otra aplicación que se le pueda dar es, que también por medio de un solo
interruptor, se pueda controlar todo un ambiente. Es decir, por ejemplo, en la figura 6.4 se
puede controlar al actuador 1 por medio del comando 1, al actuador 2 con el comando 2, y,
suponiendo que son las únicas luces del ambiente, se podría configurar un tercer comando
cuya información sea Grupo 0, Ambiente 2, Elemento de Ambiente 0; para controlar todos
actuadores que sean del ambiente 2 (así que, a manera de convención, decir Elemento de
Ambiente 0 se le está informando al controlador que dicho comando enciente o apaga todos
las luces controladas por los actuadores del Ambiente correspondiente).
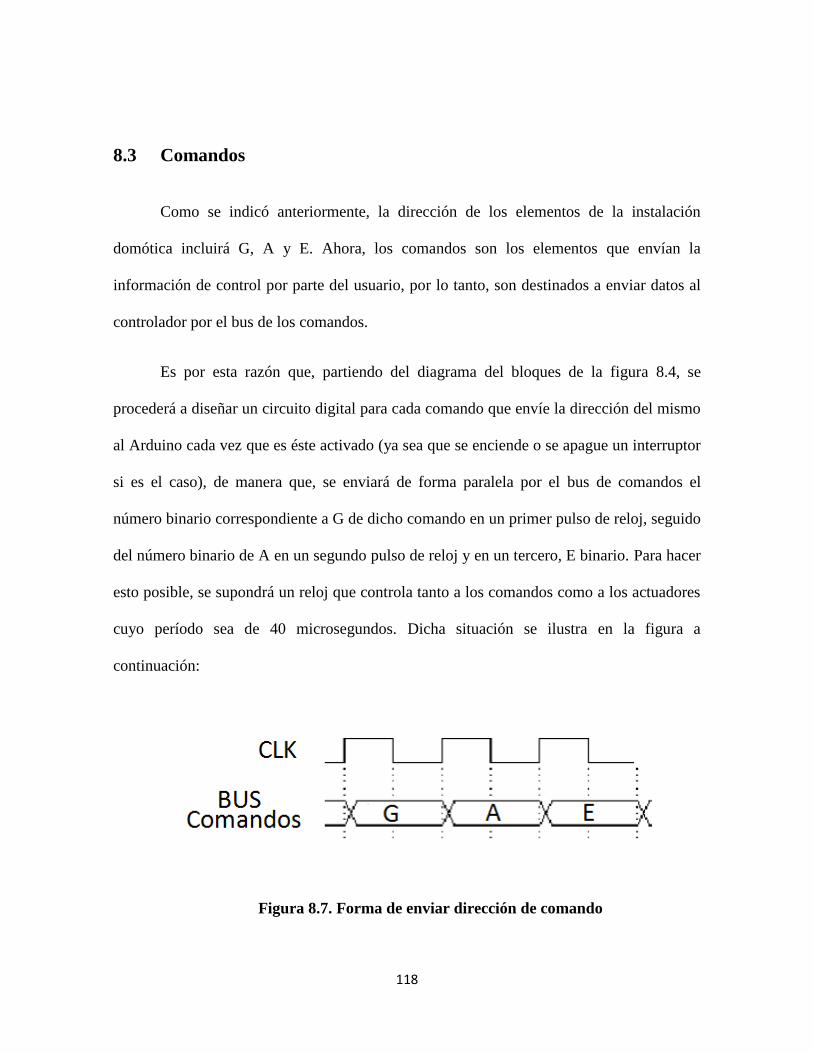
118
8.3 Comandos
Como se indicó anteriormente, la dirección de los elementos de la instalación
domótica incluirá G, A y E. Ahora, los comandos son los elementos que envían la
información de control por parte del usuario, por lo tanto, son destinados a enviar datos al
controlador por el bus de los comandos.
Es por esta razón que, partiendo del diagrama del bloques de la figura 8.4, se
procederá a diseñar un circuito digital para cada comando que envíe la dirección del mismo
al Arduino cada vez que es éste activado (ya sea que se enciende o se apague un interruptor
si es el caso), de manera que, se enviará de forma paralela por el bus de comandos el
número binario correspondiente a G de dicho comando en un primer pulso de reloj, seguido
del número binario de A en un segundo pulso de reloj y en un tercero, E binario. Para hacer
esto posible, se supondrá un reloj que controla tanto a los comandos como a los actuadores
cuyo período sea de 40 microsegundos. Dicha situación se ilustra en la figura a
continuación:
Ilustración 55Figura 8.7. Forma de enviar dirección de comando
Figura 8.7. Forma de enviar dirección de comando

119
Ahora, además de un circuito que sea capaz de guardar la información de la
dirección del comando, se debe hacer un circuito capaz de reconocer la activación del
mismo y empezar a enviar la información en 3 pulsos de reloj. Adicionalmente, por
motivos de practicidad a la hora de instalar una casa inteligente, se hará un circuito que
permita de manera manual, configurar cada comando; es decir, que se le pueda indicar al
comando que su dirección es, por ejemplo, G=0, A=1, E=4, he inclusive, se pueda
reconfigurar después para que sea el comando que controle el grupo 2 (G=2, A=0, E=0).
Así, como una primera aproximación a estas funciones descritas, se tendría los
siguientes diagramas.
Ilustración 56Figura 8.8. Diagrama del circuito para visualizar y configurar la dirección de los comandos
Figura 8.8. Diagrama del circuito para visualizar y configurar la dirección de
los comandos

120
Ilustración 57Figura 8.9. Diagrama circuito que envía los datos del comando a través del BUS de comandos
Figura 8.9. Diagrama circuito que envía los datos del comando a través del bus
de comandos
Como se muestra en la figura 8.8, un circuito basado en 3 displays de 7 segmentos
indicaría a quien va a configurar el comando la información de G, A y E. Luego, el bloque
de “lógica”, estaría formado por un pulsador para cada display, para poder cambiar el
número del mismo. También dentro de este bloque habría que incluir un contador y un
circuito anti rebote. La salida de cada uno de estos bloques se conecta a los decodificadores
de 7 segmentos para que los mismos pongan en los displays los datos necesarios para
desplegar el número correspondiente en ellos.
Se determinó que la longitud de las palabras correspondientes a G, A y E sería de 3
bits debido a que, así se pueden tener hasta 7 Ambientes, 7 Elementos de Ambiente y 7
Grupos (el 0 estará reservado para funciones específicas), por lo cual, la cuenta en cada
display deberá llegar hasta 7 y devolverse a 0. Tentativamente, para una implementación se
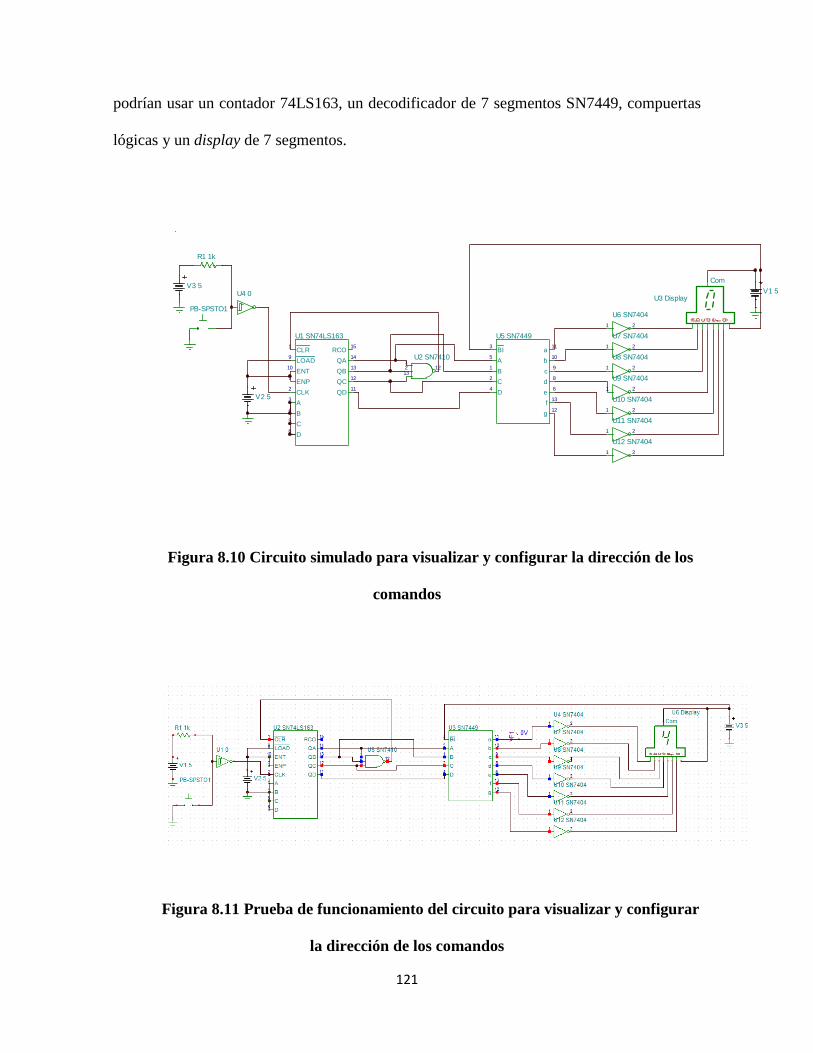
121
podrían usar un contador 74LS163, un decodificador de 7 segmentos SN7449, compuertas
lógicas y un display de 7 segmentos.
Ilustración 58Figura 8.10 Circuito simulado para visualizar y configurar la dirección de los comandos
Figura 8.10 Circuito simulado para visualizar y configurar la dirección de los
comandos
Ilustración 59Figura 8.11 Prueba de funcionamiento del circuito para visualizar y configurar la dirección de los comandos
Figura 8.11 Prueba de funcionamiento del circuito para visualizar y configurar
la dirección de los comandos
CLR
LOAD
ENT
ENP
CLK
A
B
C
D
RCO
QA
QB
QC
QD
1
9
10
7
2
3
4
5
6
15
14
13
12
11
U1 SN74LS163
1213
12
U2 SN7410
V2 5
U4 0V3 5
R1 1k
PB-SPSTO1
BI
A
B
C
D
a
b
c
d
e
f
g
3
5
1
2
4
11
10
9
8
6
13
12
U5 SN7449
Com
a b c d e f g .
U3 Display
1 2
U6 SN7404
1 2
U7 SN7404
1 2
U8 SN7404
1 2
U9 SN7404
1 2
U10 SN7404
1 2
U11 SN7404
1 2
U12 SN7404
V1 5

122
En las figuras 8.10 y 8.11 se muestra la simulación del circuito para visualizar y
configurar la dirección de los comandos para uno de los 3 displays (llámese de Grupo, de
Ambiente o de Elemento de Ambiente). La figura 8.11 corresponde a una prueba realizada
al circuito, en la que se encuentra el circuito después de un cuarto pulso por al pulsador PB-
SPST01. En esta figura, los puntos rojos representan los ceros lógicos en ese momentos,
mientras que los rojos, los unos lógicos. De esta manera, al cuarto pulso, hay un 1 en QC,
lo cual es el tercer bit de salida, mientras que QA, QB y QD son ceros; lo cual es un 4
binario, que a su vez, está llegando a las entradas del decodificador SN7449. Este último
pone en alto sus salidas “b”, “c”, “f” y “g” lo cual representa un 4 dentro del display. Los
negadores a la salida del decodificador son puestos en el diseño debido a que el display de
7 segmentos que está en la librería de Tina es de ánodo común, sin embargo, en una
implementación sería mejor usar un display de cátodo común.
Luego, de las salidas de los bloques de “lógica”, se conecta también hacia un
multiplexor como lo muestra la figura 8.9. De esta misma figura, se puede apreciar la
presencia de un contador que básicamente lo que realiza son dos funciones: poder controlar
la información que va a transmitir el MUX y controlar la salida de tercer estado del registro
de 3 estados presente en el circuito.
De esta manera, una vez que se active el pulsador del comando, se “reseteará” el
contador, contando de 0 a 3; con lo cual, cuando sea 0, se activará el tercer estado en el
registro, en 1, será seleccionado G como la salida del MUX que pasará al registro y a su vez
al bus de comandos, en 2 pasará lo mismo con A y en 3,con E. Seguidamente, el contador
volverá a 0 volviendo a ser de tercer estado la salida del circuito del comando hacia el bus y
esto permanecerá así hasta que se vuelva a activar el pulsador del comando.
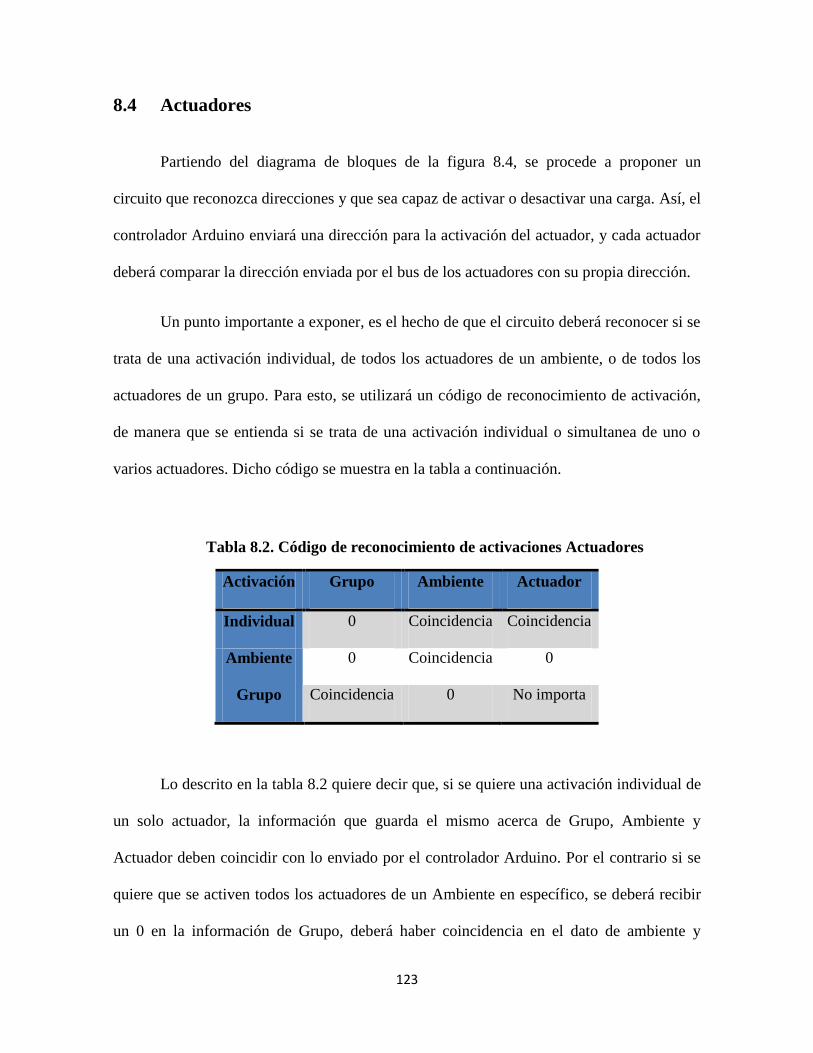
123
8.4 Actuadores
Partiendo del diagrama de bloques de la figura 8.4, se procede a proponer un
circuito que reconozca direcciones y que sea capaz de activar o desactivar una carga. Así, el
controlador Arduino enviará una dirección para la activación del actuador, y cada actuador
deberá comparar la dirección enviada por el bus de los actuadores con su propia dirección.
Un punto importante a exponer, es el hecho de que el circuito deberá reconocer si se
trata de una activación individual, de todos los actuadores de un ambiente, o de todos los
actuadores de un grupo. Para esto, se utilizará un código de reconocimiento de activación,
de manera que se entienda si se trata de una activación individual o simultanea de uno o
varios actuadores. Dicho código se muestra en la tabla a continuación.
Tabla 4Tabla 8.2. Código de reconocimiento de activaciones Actuadores
Activación Grupo Ambiente Actuador
Individual 0 Coincidencia Coincidencia
Ambiente 0 Coincidencia 0
Grupo Coincidencia 0 No importa
Lo descrito en la tabla 8.2 quiere decir que, si se quiere una activación individual de
un solo actuador, la información que guarda el mismo acerca de Grupo, Ambiente y
Actuador deben coincidir con lo enviado por el controlador Arduino. Por el contrario si se
quiere que se activen todos los actuadores de un Ambiente en específico, se deberá recibir
un 0 en la información de Grupo, deberá haber coincidencia en el dato de ambiente y
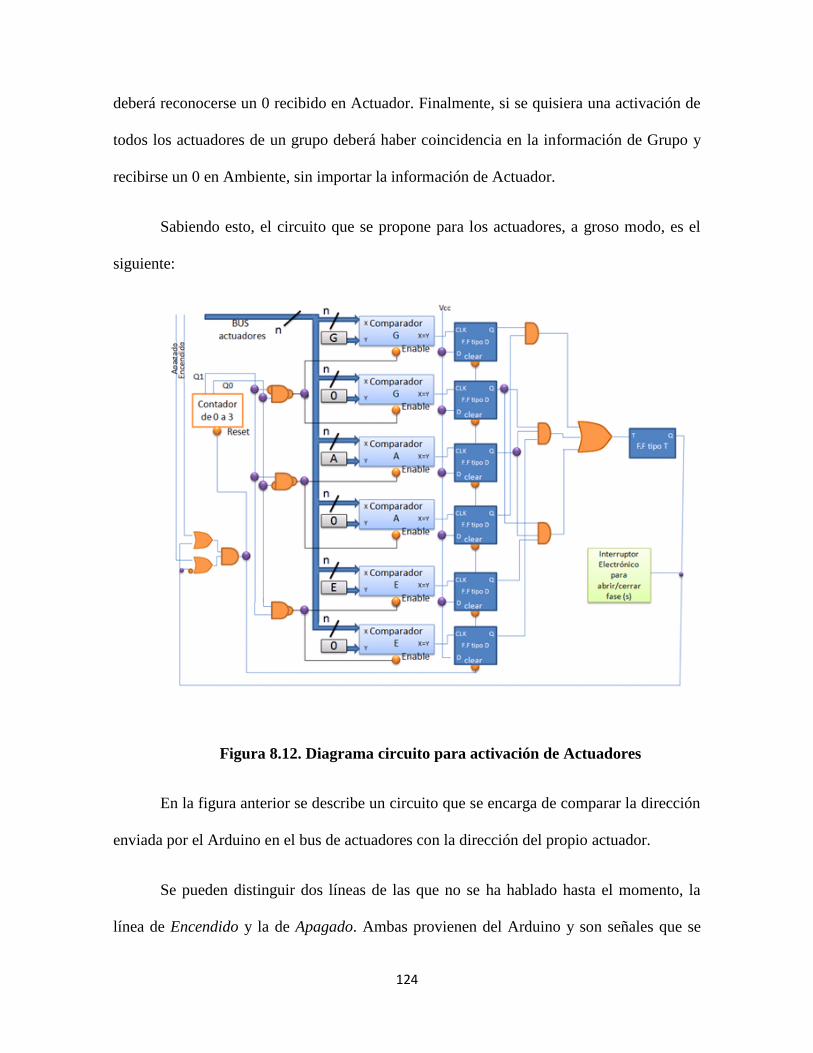
124
deberá reconocerse un 0 recibido en Actuador. Finalmente, si se quisiera una activación de
todos los actuadores de un grupo deberá haber coincidencia en la información de Grupo y
recibirse un 0 en Ambiente, sin importar la información de Actuador.
Sabiendo esto, el circuito que se propone para los actuadores, a groso modo, es el
siguiente:
Ilustración 60Figura 8.12. Diagrama circuito para activación de Actuadores
Figura 8.12. Diagrama circuito para activación de Actuadores
En la figura anterior se describe un circuito que se encarga de comparar la dirección
enviada por el Arduino en el bus de actuadores con la dirección del propio actuador.
Se pueden distinguir dos líneas de las que no se ha hablado hasta el momento, la
línea de Encendido y la de Apagado. Ambas provienen del Arduino y son señales que se

125
deben mandar por la necesidad de comunicarle al actuador si se trata de una señal con la
que se quiere encender la carga controlada por el actuador o de apagarla. Estas líneas son
útiles especialmente cuando de encendido o apagado de Ambiente o de Grupo se trata, ya
que la misión de la señal enviada por el Arduino es también distinguir las cargas que ya
están encendidas en un Grupo o en un Ambiente para no apagarlas, en el caso de ser un
encendido de Ambiente o Grupo; y de no encender las que están apagadas si la señal es de
apagado en alguno de estos casos. De esta manera sabiendo el estado actual del Actuador
(Encendido o Apagado), y sabiendo también si la señal enviada por el Arduino es de
Encendido o de Apagado, se puede, por medio de lógica combinacional determinar si se
activa o no el circuito de reconocimiento de direcciones, y de esta manera, cambiar el
estado actual del Actuador, o de mantenerlo.
De esta manera, además de enviarse la señal de dirección del actuador que se desea
encender o apagar, se envían las dos líneas recién expuestas, de manera que se propone que
en el caso de que no se requiera enviar señal alguna por el bus de los actuadores, se
mantendrán en bajo ambas líneas. Luego, en el caso que se quieran encender uno o varios
actuadores (y/o mantener encendidos) al mismo tiempo, se enviará una señal en alto en
Encendido y se mantendrá el 0 en Apagado mientras se está enviando la dirección del
actuador. Finalmente, en el caso de querer apagar uno o varios comandos (y/o mantener
apagados) al mismos tiempo, se enviará una señal en alto en Apagado y se mantendrá el 0
en Encendido mientras se está enviando la dirección del actuador. Así, siendo “S” la salida,
“E” la línea de Encendido, “A” la de Apagado y “CS” (Current State) la de Estado Actual
del Actuador, se puede realizar un Mapa de Karnaugh para encontrar la función que
describe el circuito digital mínimo que resuelve el problema.

126
Tabla 5Tabla 8.3. Tabla de verdad del circuito que activa la comparación de direcciones
del Actuador
E A CS S
0 0 0 0
0 0 1 0
0 1 0 0
0 1 1 1
1 0 0 1
1 0 1 0
1 1 0 x
1 1 1 x
Ilustración 61Figura 8.13. Mapa de Karnaugh para la función mínima que describe el circuito que activa la comparación de direcciones del Actuador
Figura 8.13. Mapa de Karnaugh para la función mínima que describe el
circuito que activa la comparación de direcciones del Actuador
De esta manera, se puede observar que la función mínima es la siguiente:
[1]
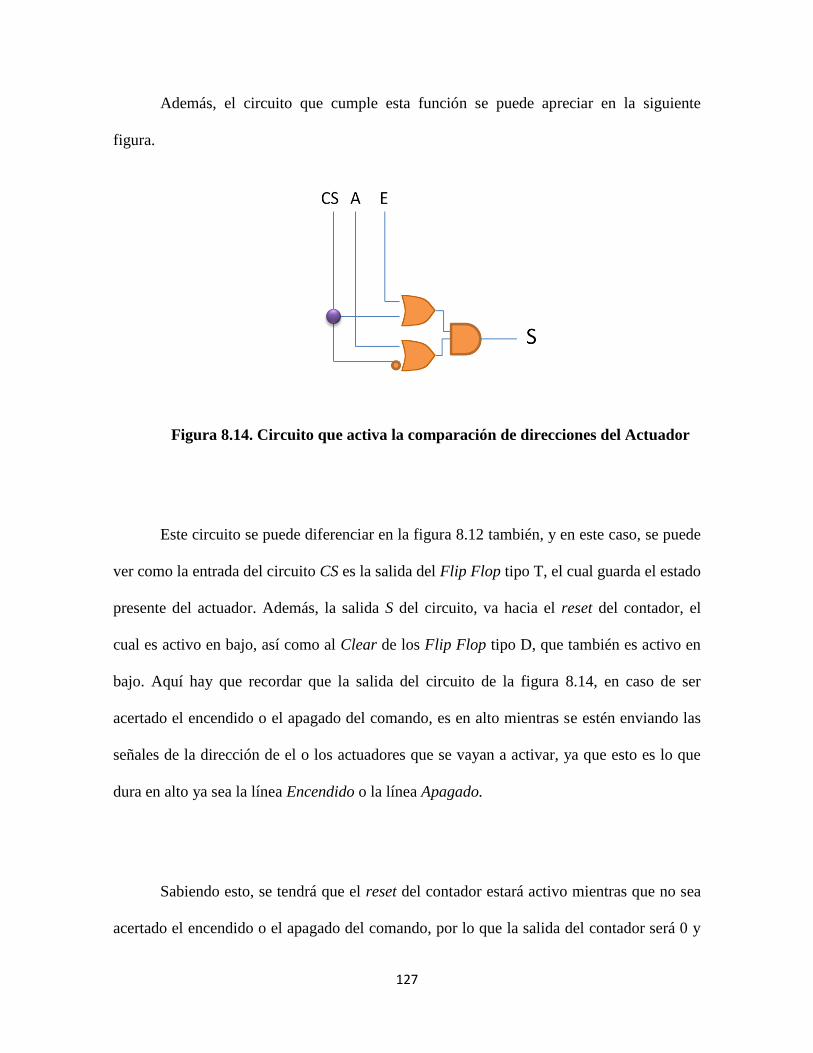
127
Además, el circuito que cumple esta función se puede apreciar en la siguiente
figura.
Ilustración 62Figura 8.14. Circuito que activa la comparación de direcciones del Actuador
Figura 8.14. Circuito que activa la comparación de direcciones del Actuador
Este circuito se puede diferenciar en la figura 8.12 también, y en este caso, se puede
ver como la entrada del circuito CS es la salida del Flip Flop tipo T, el cual guarda el estado
presente del actuador. Además, la salida S del circuito, va hacia el reset del contador, el
cual es activo en bajo, así como al Clear de los Flip Flop tipo D, que también es activo en
bajo. Aquí hay que recordar que la salida del circuito de la figura 8.14, en caso de ser
acertado el encendido o el apagado del comando, es en alto mientras se estén enviando las
señales de la dirección de el o los actuadores que se vayan a activar, ya que esto es lo que
dura en alto ya sea la línea Encendido o la línea Apagado.
Sabiendo esto, se tendrá que el reset del contador estará activo mientras que no sea
acertado el encendido o el apagado del comando, por lo que la salida del contador será 0 y
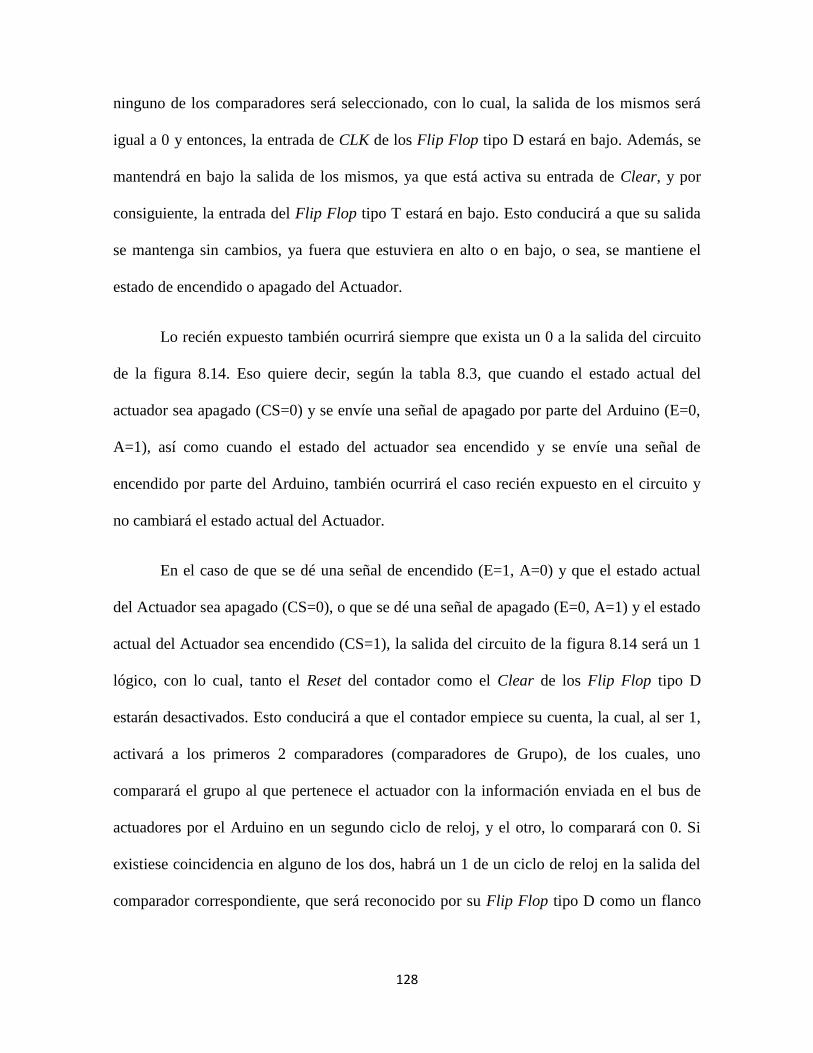
128
ninguno de los comparadores será seleccionado, con lo cual, la salida de los mismos será
igual a 0 y entonces, la entrada de CLK de los Flip Flop tipo D estará en bajo. Además, se
mantendrá en bajo la salida de los mismos, ya que está activa su entrada de Clear, y por
consiguiente, la entrada del Flip Flop tipo T estará en bajo. Esto conducirá a que su salida
se mantenga sin cambios, ya fuera que estuviera en alto o en bajo, o sea, se mantiene el
estado de encendido o apagado del Actuador.
Lo recién expuesto también ocurrirá siempre que exista un 0 a la salida del circuito
de la figura 8.14. Eso quiere decir, según la tabla 8.3, que cuando el estado actual del
actuador sea apagado (CS=0) y se envíe una señal de apagado por parte del Arduino (E=0,
A=1), así como cuando el estado del actuador sea encendido y se envíe una señal de
encendido por parte del Arduino, también ocurrirá el caso recién expuesto en el circuito y
no cambiará el estado actual del Actuador.
En el caso de que se dé una señal de encendido (E=1, A=0) y que el estado actual
del Actuador sea apagado (CS=0), o que se dé una señal de apagado (E=0, A=1) y el estado
actual del Actuador sea encendido (CS=1), la salida del circuito de la figura 8.14 será un 1
lógico, con lo cual, tanto el Reset del contador como el Clear de los Flip Flop tipo D
estarán desactivados. Esto conducirá a que el contador empiece su cuenta, la cual, al ser 1,
activará a los primeros 2 comparadores (comparadores de Grupo), de los cuales, uno
comparará el grupo al que pertenece el actuador con la información enviada en el bus de
actuadores por el Arduino en un segundo ciclo de reloj, y el otro, lo comparará con 0. Si
existiese coincidencia en alguno de los dos, habrá un 1 de un ciclo de reloj en la salida del
comparador correspondiente, que será reconocido por su Flip Flop tipo D como un flanco

129
creciente en CLK, con lo cual, se tendrá un 1 en la salida del mismo (que durará mientras
esté desactivado el Clear de los Flip Flop tipo D).
Los siguientes dos comparadores serán activados cuando la salida del contador sea
un 2 binario, de manera que uno comparará lo enviado en un tercer ciclo de reloj por el
Arduino con el Ambiente al que pertenece el Actuador, y el otro, lo comparará con 0. Si
existiese coincidencia en alguno de los dos, se transmitirá un 1 a la salida de su
correspondiente Flip Flop tipo D.
Seguidamente, al llegar el contador a un 3 binario en su salida, se seleccionarán los
últimos 2 comparadores que se encargarán de comparar lo enviado en el cuarto ciclo de
reloj por el Arduino, uno con la información de Actuador (Elemento de Ambiente) de éste
mismo, y el otro con un 0. Al igual que en los dos casos anteriores, si hubiese coincidencia,
se obtendrá un estado en alto a la salida de su correspondiente Flip Flop tipo D.
Luego, y cumpliendo con lo acordado en la tabla 8.2 acerca del código de
reconocimiento de activación de actuadores, se colocan las compuestas AND a la salida de
los Flip Flop tipo D para que se envíe un 1 a la compuerta OR en caso de una coincidencia
que provoque una activación individual, de grupo o de ambiente. Así, finalmente, si
existiera un estado en alto en la entrada de la OR, será éste transmitido a la salida del
mismo, con lo cual, existirá un flanco positivo a la entrada del Flip Flop tipo T; y éste
cambiará su estado, ya sea de alto a bajo o viceversa.
Finalmente, coloca un bloque conectado a la salida del Flip Flop tipo T llamado
“Interruptor Electrónico para abrir/cerrar fase(s)”. Este circuito es básicamente un

130
dispositivo electrónico o electromecánico que puede tratarse de un TRIAC o de un Relé,
que en ambos casos, son elementos controlados por pequeñas corrientes que puede abrir y
cerrar un circuito de mayor potencia, como lo sería la línea de la fase que va para una carga
de corriente alterna (por ejemplo una luminaria), tal y como se muestra en la imagen a
continuación.
Ilustración 63Figura 8.15. Función básica del interruptor electrónico para abrir y cerrar fase
Figura 8.15. Función básica del interruptor electrónico para abrir y cerrar fase
Inicialmente, se toma como opción principal al TRIAC como solución al circuito de
interruptor electrónico debido a que, a diferencia del Relé Electromecánico, no presenta el
efecto de rebote al cierre del circuito, ya que se trata de un interruptor electrónico estático.
Sin embargo, debido a que el circuito de acople del TRIAC a un circuito digital
normalmente incluye un optoacoplador para evitar corrientes de fuga hacia las compuertas,
e investigando más profundamente en este tema, se toma como decisión usar un Relé de
131
Estado Sólido (SSR), el cual, realiza la misma función de un Relé Electromecánico, pero
mediante electrónica (de hecho, normalmente están hechos con TRIACs y octoacopladores)
por lo que son mecánicamente estáticos, y reducen el tamaño del circuito final si se quisiera
implementar. De esta manera, el circuito sería el que sigue:
Ilustración 64Figura 8.16. Circuito para interrumpir fase en una carga de 120V
Figura 8.16. Circuito para interrumpir fase en una carga de 120V
Es importante recalcar el hecho de que los circuitos expuestos para los actuadores y
los comandos son aplicables a la mayoría de los elementos que se deseen automatizar
dentro del hogar domótico, incluyendo inclusive los dispositivos de la alarma inteligente,
tanto los sensores de presencia, como detectores perimetrales, como sensores de humo, de
gas (como comandos); el zumbador, la electroválvula, el motor de las persianas (como
actuadores), entre otros.
8.5 El controlador
132
Como se ha mencionado en repetidas ocasiones, el controlador que se utilizará
como propuesta para un sistema domótico es el Arduino Mega.
Las funciones que se le darán a este microcontrolador serán la de reconocer
direcciones en sus entrada (bus de comandos), enviar direcciones por el bus de actuadores
junto con las señales de encendido u apagado, guardar el estado actual de cada actuador
para así decidir cuándo apagar o encender un grupo o un ambiente.
Al microcontrolador Arduino deberán entrarle un total de 5 líneas: una
correspondiente al pulso de activación del comando (la salida del circuito anti rebote de la
figura 8.9), otra correspondiente a un reloj con el cual funcionarán tanto los actuadores
como los comandos, y las 3 líneas del bus de comandos. Por otro lado, el Arduino deberá
tener 5 pines configurados como salidas: uno para la línea de Encendido, otra para la línea
de Apagado, y las 3 líneas del bus de los actuadores.
Sabiendo esto, la lógica con la que se programará el microcontrolador será la
siguiente:
- Primero se inicializarán el estado de cada uno de los actuadores, de manera que
se represente el estado inicial de apagado en cada uno de ellos, el cual estará
siendo constantemente cambiado según lo indiquen los comandos. Esto se hará
de manera que se guarde en el Arduino esta información.
- Luego se deberá reconocer si hay envío de datos por parte de los comandos, en
caso de que no lo haya, las salidas del Arduino deberá mostrar ceros, tanto en las
líneas del bus de actuadores como en las líneas de Apagado y Encendido.

133
- En el caso de que sí hubiera envío de datos por parte de los comandos, estos
datos se guardarán en un vector de 3 posiciones llamado GAE, en cuyas
posiciones tendrá el número de Grupo, el número de Ambiente y el número de
Comando, correspondientes al comando que envía dicha información
- Una vez guardada esta información, se procederá a actualizar el dato del estado
de los actuadores. Es decir, si el estado del actuador era apagado y se envía una
señal por parte del comando correspondiente, se guarda que ahora el estado del
actuador es encendido. En esta parte hay que tener un poco de cuidado en el
sentido de que existen comandos para la activación individual de un actuador,
comandos para activación de un ambiente y comandos para la activación de un
grupo, por lo que se deberá distinguir entre estos 3 para saber si se debe cambiar
el estado actual de un solo actuador, de todos los actuadores de un grupo o de
todos los actuadores de un ambiente.
- Una vez actualizada la información del estado del actuador, se podrá saber si la
línea de Encendido es la que debe ir en alto o lo es la de Apagado, por lo tanto,
se guarda también esta información.
- Luego, tomando en cuenta el dato anteriormente guardado, se coloca la línea de
encendido o la de apagado en alto, según corresponda, y se envía la dirección
del actuador, o del grupo, o del ambiente que debe encenderse o apagarse.
- Finalmente, una vez enviados los datos de Grupo, Ambiente y Actuador por el
bus de actuadores, se vuelven a colocar las salidas del mismo en 0, así como las
líneas de Encendido y de Apagado, mientras se espera otro envío de datos por
parte de los comandos.

134
A continuación se muestra un diagrama de flujo del programa general del Arduino:
Ilustración 65Figura 8.17. Diagrama del flujo del programa del Arduino
Figura 8.17. Diagrama del flujo del programa del Arduino

135
El programa propuesto para la solución de la situación expuesta en figura 8.17 se
presenta en los anexos.
136
CAPÍTULO 9: Conclusiones y Recomendaciones
- Se concluye que el término “Domótica” se refiere al conjunto de elementos
aplicados a la automatización parcial o total de las funciones que se pueden realizar
en una vivienda.
- Las partes esenciales que conforman el sistema integral de una casa inteligente son
los sensores, los actuadores y la(s) unidad(es) de mando o control.
- En la actualidad, la pasarela residencial o dispositivo de conexión a internet del
hogar domótico, es un elemento que se suele agregar cada vez más a la vivienda
inteligente, esto con la intensión de mediar entre los distintos protocolos de los
elementos conectados a las redes internas domóticas, así como para poder tener
acceso remoto a través de internet al sistema de automatización de la residencia.
- Actualmente, las redes internas que conforman un hogar domótico son: la red de
datos, la red multimedia y la red de control, siendo esta última la más importante
para considerar a una vivienda como inteligente, puesto que es la que se encarga de
la automatización de los distintos elementos.
137
- La evolución temporal-tecnológica de los sistemas domóticos se puede estudiar
desde la forma en que los protocolos han evolucionado
- La situación actual de los sistemas domóticos excluye cada vez más a los protocolos
propietarios del mercado debido a su incompatibilidad con otros sistemas y
productos de otras marcas, mientras que los protocolos estándar KNX y LonWorks
se apoderan del mercado domótico.
- La red que interconecta los dispositivos de las alarmas dentro de un hogar
inteligente se suele independizar de la red de control domótica, especialmente en los
casos en los que esta red está en contacto con el internet por medio de una pasarela
residencial; esto para evitar ingresos no deseados de hackers al sistema de alarmas
por medio del Internet.
- En algunos casos, en lo que a elementos de alarmas respecta, suele ser de mayor
eficiencia conectar directamente un sensor a un actuador, esto para tener una mayor
fiabilidad y velocidad en la acción a tomarse.
- Los sistemas ZModo resultan ser una opción tecnológica de vanguardia en
vigilancia residencial por medio de cámaras de tecnología infrarroja, que se
comercializa actualmente por empresas como Shenzhen.
138
- La iluminación residencial de tipo LED se muestra en el mercado como una opción
de ahorro de energía eléctrica, que en comparación con otras fuentes de iluminación
utilizadas en las casas de habitación, presenta una eficiencia mucho mayor en la
conversión de energía eléctrica a energía lumínica.
- En la actualidad existen distintos métodos de fabricación casera de sistemas
domóticos, sin embargo, la mayoría utilizan un computador como elemento de
control central de dicho sistema.
- La línea My Home de Bticino es una propuesta domótica que se comercializa en el
país, la cual funciona mediante bus EIB, donde no existe un elemento central de
control y que, además de un sistema de automatización de tipo bus, presenta
también sistemas de alarmas, sistemas de difusión sonora y sistemas de
termorregulación.
- El microcontrolador Arduino Mega resulta ser una opción efectiva para su uso en
sistemas domóticos como circuito de control en una red de arquitectura centralizada,
esto debido a la cantidad de pines de entradas y salidas digitales que posee, así
como a su mayor capacidad de memoria en comparación con otros modelos de
Arduino.
- La creación de un sistema domótico por medio de un bus, requiere de que los
elementos interconectados a mismo tengan cierto nivel de inteligencia, de manera

139
que al menos los mismos puedan almacenar la información referente a su dirección
de ubicación.
- Para futuras implementaciones del sistema domótico propuesto en el capítulo 8, se
recomienda la inclusión de un medio de control y regulación de la intensidad
luminosa de luminarias, tanto en el programa para el Arduino como en los circuitos
del actuador y del comando.
- Se recomienda, como una mejora para el sistema domótico propuesto en el
capítulo8, la inclusión de una interfaz gráfica con el usuario, ya sea esta una pantalla
táctil o una pantalla convencional con un teclado.
140
BIBLIOGRAFÍA
Revistas y Documentos
[1] Huidobro, J.; Millán, R. “Domótica: Edificios Inteligentes”, 3° Edición, Editorial
Limusa, México DF, 2006
[2] Romero, C. Vázquez, F. y De Castro, C. “Domótica e Inmótica: Viviendas y edificios
inteligentes”, Primera Edición, Grupo Alfaomega, México, 2006
[3] Autor desconocido. “El Mando de tu casa”,
http://iboxsat.5mp.eu/web.php?a=iboxsat&o=23mqKXr95A
[4] Autor desconocido. “Los cuidados que hay que tener a la hora de comprar un
televisor inteligente”, http://www.televisoreshoy.com/los-cuidados-que-hay-que-tener-a-
la-hora-de-comprar-un-televisor-inteligente.html
[5] Autor desconocido. “Casas Bioclimáticas”
http://rehabilitacioneshercules.blogspot.com/2011/07/casas-bioclimaticas.html

141
[6] Autor desconocido. “Bombillas LED para sustituir a las halógenas”
http://tecnologyc.com/bombillas-led-para-sustituir-a-las-halogenas/
[7] Sosa, D. “Muestreo y digitalización de señales”, http://www.mailxmail.com/curso-
muestreo-digitalizacion-senales/senal-continua-senal-discreta
[8] Autor desconocido. “Termostato programable inalámbrico”
http://donvendo.com/product/Termostato-programable-inal%C3%A1mbrico-RF-Diaria-o-
semanal-RADIO-TYBOX-810.html
[9] Autor desconocido. “Detector de gas natural” ,
http://www.segurbaby.com/p146/tecnologicos/detector-de-gas/detector-de-gas-natural.html
[10] Autor desconocido. “Galería de BTicino México”,
http://www.flickr.com/photos/bticinomexico/page4/
[11] Autor desconocido. “Alarmas” , https://sites.google.com/site/compusendero/alarmas
142
[12] Autor desconocido. “Detectores”,
http://www.clonbox.com/product_info.php?products_id=6746&osCsid=3810760521c4e33
d0a0d364ae48db68a
[13] Autor desconocido. “Electroválvulas y recambios (bobinas, núcleos…) ,
http://www.hogartintorero.com/Recambios/Paginas_generales/Electrovalvulas.htm
[14] Autor desconocido. “Pasarela de integración TCP/IP-LCN/Base de LCN
IBERICA , http://www.tsb.upv.es/ubicuitics/index.php?p=282
[15] Autor desconocido. “Micasaverde.com lanza la tercera versión de Gateway zwave
Vera3 y renueva el interface de usuario” ,
http://blog.domoticadavinci.com/2011/12/micasaverdecom-lanza-la-tercera-version.html
[16] Moreno Gil, J. Rodríguez Elías, E. Lasso Tárraga, D. “Instalaciones Automatizadas
en Viviendas y Edificios”. 4° edición, Editorial Thomson Paraninfo, México DF, 2006
[17] Autor desconocido, “Intel 4004” , http://es.wikipedia.org/wiki/Intel_4004
143
[18] Pérez Pellicena, F. “Realización de sistema domótico con microcontroladores de
bajo coste (AVR) y módulos RF, Verificando el estándar 802.15.4”, Escuela
Universitaria Ingeniería Técnica Industrial Zaragoza, 2010.
[19]Yu, L. “Material para el curso IE0503: Estructuras de Computadores Digitales I”
, Universidad de Costa Rica, 2009.
[20] Autor desconocido, “Konrad Zuse” , http://es.wikipedia.org/wiki/Konrad_Zuse
[21] Autor desconocido, “Thomas Alva Edison”,
http://www.biografiasyvidas.com/biografia/e/edison.htm
[22] Autor desconocido, “Historia de la domótica: Pasado, Presente y Futuro” ,
http://www.domoprac.com/domoteca/domoteca/conceptos-basicos/historia-de-la-domotica-
pasado-presente-y-futuro.html
[23] Autor desconocido, “Home automation”,
http://en.wikipedia.org/wiki/Home_automation#cite_note-9

144
[24] Autor desconocido, “LonTalk”, http://en.wikipedia.org/wiki/LonTalk
[25] Driscoll, E. “A Timeline for Home Automation”,
http://www.eddriscoll.com/timeline.html
[26] Huérfano P. “Estudio para reducción de consumo energético en Colombia basado
en Tecnología Domótica”, Fundación Universitaria Konrad Lorenz, 2011
[27] Autor desconocido, “Bus de Instalación Europeo”,
http://es.wikipedia.org/wiki/Bus_de_Instalaci%C3%B3n_Europeo
[28] Autor desconocido, “Modbus”, http://es.wikipedia.org/wiki/Modbus
[29] Autor desconocido, “BACnet-Automatización de edificios y redes de control”,
http://www.ccontrols.com/es/tech/bacnet.htm
[30] Autor desconocido, “Teletask”,
http://www.domowiki.es/domowiki/index.php/TELETASK

145
[31] Autor desconocido, “Nuestra Historia”, http://www.deltadore.com/spain/es/el-
grupo/nuestra-historia.html
[32] Autor desconocido, “Vivimat”,
http://www.domowiki.es/domowiki/index.php/VIVIMAT
[33] Autor desconocido. “MY HOME, GUÍA TÉCNICA 2011”, BTcino, 2011
[34] Autor desconocido. “LED TUTORIAL”,
http://www.societyofrobots.com/electronics_led_tutorial.shtml
[35] Autor desconocido. “Diodos emisores de Luz (LED) ,
http://www.itlalaguna.edu.mx/academico/carreras/electronica/opteca/OPTOPDF2_archivos
/UNIDAD2TEMA7.PDF
[36] Autor desconocido. “Led”, http://es.wikipedia.org/wiki/Led
146
[37] Autor desconocido. “Comparativa y equivalencia entre las lámparas led y otras del
mercado”,http://www.bombillasbajoconsumo.com/iluminacion_bajoconsumo/lamparas_le
d/comparativa_led.html
[38] Boylestad, R. Nashelsky, L. “Electrónica: Teoría de circuitos y dispositivos
electrónicos” Octava Edición, Pearson Educación, México 2003.
[39] Autor desconocido. “El Diodo”, http://omarai.wordpress.com/conceptos-
teoricos/semiconductores/el-diodo/
[40] Torres Aguilar, G. “Diodos emisores de luz de alta potencia de 1W”
http://www.iluminet.com.mx/diodos-emisores-de-luz-de-alta-potencia-de-1w/
[41] Autor desconocido. “Piensa LED piensa verde piensa Schneider Electric”
http://www.schneider-electric.com.mx/documents/productos-servicios/sistemas-
instalacion/juno.pdf]
[42] Autor desconocido. “Led Rojo Alta Potencia 1 watt 50 Lumen Luxeon” ,
http://articulo.mercadolibre.com.uy/MLU-31122881-led-rojo-alta-potencia-1watt-50-
lumen-luxeon-_JM?redirectedFromParent=MLU30083478

147
[43] Sacco, M. “Comparativa Arduino: Arduino vs. El resto” ,
http://www.neoteo.com/comparativa-arduino-arduino-vs-el-resto-15399
[44] Autor desconocido. “Arduino Mega”, http://arduino.cc/en/Main/ArduinoBoardMega
[45] Gonzales, O. “Cómo comenzar con Arduino – Modelos y características” ,
http://blog.bricogeek.com/noticias/arduino/como-comenzar-con-arduino---modelos-y-
caracteristicas/
[46] Montero, I. “El modelo de referencia OSI: Introducción y repaso de niveles”,
http://mundoinformatica.portalmundos.com/el-modelo-de-referencia-osi-introduccion-y-
repaso-de-niveles/
Wakerly, J. “Diseño Digital Principios y Prácticas” Tercera Edición, Pearson Educación,
México 2001.

148
ANEXOS
Anexo #1: Programa Arduino //Los 3 BUSC son el bus de los comandos
int BUSC1 = 1;
int BUSC2 = 2;
int BUSC3 = 3;
int pulso = 4;//Señal de pulso de activación de comando
int ClockCom = 5;//Reloj de los Comandos y Actuadores
//Los 3 BUSAC son el bus de los Actuadores
int BUSAC1=6;
int BUSAC2=7;
int BUSAC3=8;
int EncApag=0;//Variable interna usada para saber el estado de las dos lineas E y A
int A=9;//Línea de Apagado
int E=10;//Línea de Encendido
int x=0;//Variable interna usada para poder identificar un flanco creciente en la señal de pulso
//De aquí en adelante, 0 significará estado apagado, 1 estado encendido
//Estos son los indicadores de el estado inicial de los grupos
int Grupo1=0;
int Grupo2=0;
int Grupo3=0;
int Grupo4=0;
int Grupo5=0;
int Grupo6=0;
int Grupo7=0;
//Estos son los indicadores de el estado inicial de los grupos

149
int Amb1=0;
int Amb2=0;
int Amb3=0;
int Amb4=0;
int Amb5=0;
int Amb6=0;
int Amb7=0;
//Estos vectores guardan el estado de todos los posibles Actuadores
int GceroAcero [] =0,0,0,0,0,0,0,0;
int GceroAuno [] =0,0,0,0,0,0,0,0;
int GceroAdos [] =0,0,0,0,0,0,0,0;
int GceroAtres [] =0,0,0,0,0,0,0,0;
int GceroAcuatro [] =0,0,0,0,0,0,0,0;
int GceroAcinco [] =0,0,0,0,0,0,0,0;
int GceroAseis [] =0,0,0,0,0,0,0,0;
int GceroAsiete [] =0,0,0,0,0,0,0,0;
int GunoAcero [] =0,0,0,0,0,0,0,0;
int GunoAuno [] =0,0,0,0,0,0,0,0;
int GunoAdos [] =0,0,0,0,0,0,0,0;
int GunoAtres [] =0,0,0,0,0,0,0,0;
int GunoAcuatro [] =0,0,0,0,0,0,0,0;
int GunoAcinco [] =0,0,0,0,0,0,0,0;
int GunoAseis [] =0,0,0,0,0,0,0,0;
int GunoAsiete [] =0,0,0,0,0,0,0,0;
int GdosAcero [] =0,0,0,0,0,0,0,0;
int GdosAuno [] =0,0,0,0,0,0,0,0;
int GdosAdos [] =0,0,0,0,0,0,0,0;
int GdosAtres [] =0,0,0,0,0,0,0,0;
int GdosAcuatro [] =0,0,0,0,0,0,0,0;
int GdosAcinco [] =0,0,0,0,0,0,0,0;
int GdosAseis [] =0,0,0,0,0,0,0,0;
int GdosAsiete []=0,0,0,0,0,0,0,0;

150
int GtresAcero []=0,0,0,0,0,0,0,0;
int GtresAuno []=0,0,0,0,0,0,0,0;
int GtresAdos []=0,0,0,0,0,0,0,0;
int GtresAtres []=0,0,0,0,0,0,0,0;
int GtresAcuatro []=0,0,0,0,0,0,0,0;
int GtresAcinco []=0,0,0,0,0,0,0,0;
int GtresAseis []=0,0,0,0,0,0,0,0;
int GtresAsiete []=0,0,0,0,0,0,0,0;
int GcuatroAcero []=0,0,0,0,0,0,0,0;
int GcuatroAuno []=0,0,0,0,0,0,0,0;
int GcuatroAdos []=0,0,0,0,0,0,0,0;
int GcuatroAtres []=0,0,0,0,0,0,0,0;
int GcuatroAcuatro []=0,0,0,0,0,0,0,0;
int GcuatroAcinco []=0,0,0,0,0,0,0,0;
int GcuatroAseis []=0,0,0,0,0,0,0,0;
int GcuatroAsiete []=0,0,0,0,0,0,0,0;
int GcincoAcero []=0,0,0,0,0,0,0,0;
int GcincoAuno []=0,0,0,0,0,0,0,0;
int GcincoAdos []=0,0,0,0,0,0,0,0;
int GcincoAtres []=0,0,0,0,0,0,0,0;
int GcincoAcuatro []=0,0,0,0,0,0,0,0;
int GcincoAcinco []=0,0,0,0,0,0,0,0;
int GcincoAseis []=0,0,0,0,0,0,0,0;
int GcincoAsiete []=0,0,0,0,0,0,0,0;
int GseisAcero []=0,0,0,0,0,0,0,0;
int GseisAuno []=0,0,0,0,0,0,0,0;
int GseisAdos []=0,0,0,0,0,0,0,0;
int GseisAtres []=0,0,0,0,0,0,0,0;
int GseisAcuatro []=0,0,0,0,0,0,0,0;
int GseisAcinco []=0,0,0,0,0,0,0,0;
int GseisAseis []=0,0,0,0,0,0,0,0;
int GseisAsiete []=0,0,0,0,0,0,0,0;
int GsieteAcero []=0,0,0,0,0,0,0,0;
int GsieteAuno []=0,0,0,0,0,0,0,0;
151
int GsieteAdos []=0,0,0,0,0,0,0,0;
int GsieteAtres []=0,0,0,0,0,0,0,0;
int GsieteAcuatro []=0,0,0,0,0,0,0,0;
int GsieteAcinco []=0,0,0,0,0,0,0,0;
int GsieteAseis []=0,0,0,0,0,0,0,0;
int GsieteAsiete []=0,0,0,0,0,0,0,0;
int GAE[]=0,0,0;//Para que inicialmente se tenga activación nula
//GAE es un vector de variables internas que guarda la información enviada por los comandos
void setup () //Modulo necesario para declarar las los pines que serán salidas
pinMode (BUSAC1, OUTPUT);//Las salidas hacia los actuadores
pinMode (BUSAC2, OUTPUT);//Las salidas hacia los actuadores
pinMode (BUSAC3, OUTPUT);//Las salidas hacia los actuadores
pinMode (E, OUTPUT);//La salida de encendido
pinMode (A, OUTPUT);//La salida del apagado
void loop () //Módulo donde se ejecuta el programa
//Aqui van las variables usadas para los contadores de los for que se vayan a usar
int i;
int j;
int k;
int m;
if (digitalRead(pulso) == LOW)
x=1;
else
152
x=0;
if (x==1 && digitalRead(pulso)==HIGH)//Esto es para identificar un flanco positivo
for (i=0;i<3;i++)
delayMicroseconds(40);//Para que espere hasta que se cumpla el siguiente ciclo del reloj (en el primero
no se envian datos hacia el Arduino)
if (digitalRead(BUSC1)==HIGH && digitalRead(BUSC2)==HIGH &&
digitalRead(BUSC3)==HIGH)
GAE[i]=7;
else if (digitalRead(BUSC1)==HIGH && digitalRead(BUSC2)==HIGH && digitalRead(BUSC3)==LOW)
GAE[i]=6;
else if (digitalRead(BUSC1)==HIGH && digitalRead(BUSC2)==LOW &&
digitalRead(BUSC3)==HIGH)
GAE[i]=5;
else if (digitalRead(BUSC1)==HIGH && digitalRead(BUSC2)==LOW &&
digitalRead(BUSC3)==LOW)
GAE[i]=4;
else if (digitalRead(BUSC1)==LOW && digitalRead(BUSC2)==HIGH && digitalRead(BUSC3)==HIGH)
GAE[i]=3;
else if (digitalRead(BUSC1)==LOW && digitalRead(BUSC2)==HIGH &&
digitalRead(BUSC3)==LOW)
153
GAE[i]=2;
else if (digitalRead(BUSC1)==LOW && digitalRead(BUSC2)==LOW &&
digitalRead(BUSC3)==HIGH)
GAE[i]=1;
else if (digitalRead(BUSC1)==LOW && digitalRead(BUSC2)==LOW &&
digitalRead(BUSC3)==LOW)
GAE[i]=0;
else
GAE[0]=0;
GAE[1]=0;//Caso en el cual no se manda nada el arduino estado indefinido, no haga nada
GAE[2]=0;
else
GAE[0]=0;
GAE[1]=0;//Caso en el cual no mande nada el arduino estado indefinido, no haga nada
GAE[2]=0;
//Se estudia la posibilidad de una activacion nula y se mantiene la línea de encendido y la de apagado ambas en bajo
if (GAE[0]==0 && GAE[1]==0 && GAE[2]==0)
EncApag=0;//Líneas de apagado y encendido en cero
/*---------------------------------------------------------------------------------------------------
-----------------------------------------------------------------------------------------------------
154
-------Apartir de aquí se hace la comparacion punto a punto------------------------------------------
-----------------------------------------------------------------------------------------------------
-----------------------------------------------------------------------------------------------------*/
for (j=1;j<8;j++)//Esto se hace desde 1 y no desde 0 ya que con j=0 se trataría de una activación grupal
if (GAE[0]==0 && GAE[1]==1 && GAE[2]==j)//Se debe actualizar todos los casos en los que el ambiente sea 1 y
el actuador sea j
if (GceroAuno[j]==0)
GceroAuno[j]=1;
EncApag=2;//EncApag=2 significa Encendido
else
GceroAuno[j]=0;
EncApag=1;//EncApag=1 significa Apagado
// para los demás casos GunoAuno
if (GunoAuno[j]==0)
GunoAuno[j]=1;
EncApag=2;
else
GunoAuno[j]=0;
EncApag=1;
//GdosAuno
155
if (GdosAuno[j]==0)
GdosAuno[j]=1;
EncApag=2;
else
GdosAuno[j]=0;
EncApag=1;
//GtresAuno
if (GtresAuno[j]==0)
GtresAuno[j]=1;
EncApag=2;
else
GtresAuno[j]=0;
EncApag=1;
//GcuatroAuno
if (GcuatroAuno[j]==0)
GcuatroAuno[j]=1;
EncApag=2;
else
156
GcuatroAuno[j]=0;
EncApag=1;
//GcincoAuno
if (GcincoAuno[j]==0)
GcincoAuno[j]=1;
EncApag=2;
else
GcincoAuno[j]=0;
EncApag=1;
//GseisAuno
if (GseisAuno[j]==0)
GseisAuno[j]=1;
EncApag=2;
else
GseisAuno[j]=0;
EncApag=1;
// GsieteAuno
if (GsieteAuno[j]==0)
157
GsieteAuno[j]=1;
EncApag=2;
else
GsieteAuno[j]=0;
EncApag=1;
//Acá termina el primer caso que contempla a GAE[] = 0,1,j
//EL CASO GAE[]= 0,2,j
if (GAE[0]==0 && GAE[1]==2 && GAE[2]==j)
//Para GceroAdos
if (GceroAdos[j]==0)
GceroAdos[j]=1;
EncApag=2;
else
GceroAdos[j]=0;
EncApag=1;
//GunoAdos
if (GunoAdos[j]==0)
GunoAdos[j]=1;
EncApag=2;
158
else
GunoAdos[j]=0;
EncApag=1;
//GdosAdos
if (GdosAdos[j]==0)
GdosAdos[j]=1;
EncApag=2;
else
GdosAdos[j]=0;
EncApag=1;
//GtresAdos
if (GtresAdos[j]==0)
GtresAdos[j]=1;
EncApag=2;
else
GtresAdos[j]=0;
EncApag=1;
//GcuatroAdos
159
if (GcuatroAdos[j]==0)
GcuatroAdos[j]=1;
EncApag=2;
else
GcuatroAdos[j]=0;
EncApag=1;
//GcincoAdos
if (GcincoAdos[j]==0)
GcincoAdos[j]=1;
EncApag=2;
else
GcincoAdos[j]=0;
EncApag=1;
//GseisAdos
if (GseisAdos[j]==0)
GseisAdos[j]=1;
EncApag=2;
else
160
GseisAdos[j]=0;
EncApag=1;
// GsieteAdos
if (GsieteAdos[j]==0)
GsieteAdos[j]=1;
EncApag=2;
else
GsieteAdos[j]=0;
EncApag=1;
//Acá termina el segundo caso que contempla a GAE[] = 0,2,j
//EL CASO GAE[]= 0,3,j
if (GAE[0]==0 && GAE[1]==3 && GAE[2]==j)
//Para GceroAtres
if (GceroAtres[j]==0)
GceroAtres[j]=1;
EncApag=2;
else
GceroAtres[j]=0;
EncApag=1;
161
//GunoAtres
if (GunoAtres[j]==0)
GunoAtres[j]=1;
EncApag=2;
else
GunoAtres[j]=0;
EncApag=1;
//GdosAtres
if (GdosAtres[j]==0)
GdosAtres[j]=1;
EncApag=2;
else
GdosAtres[j]=0;
EncApag=1;
//GtresAtres
if (GtresAtres[j]==0)
GtresAtres[j]=1;
EncApag=2;
162
else
GtresAtres[j]=0;
EncApag=1;
//GcuatroAtres
if (GcuatroAtres[j]==0)
GcuatroAtres[j]=1;
EncApag=2;
else
GcuatroAtres[j]=0;
EncApag=1;
//GcincoAtres
if (GcincoAtres[j]==0)
GcincoAtres[j]=1;
EncApag=2;
else
GcincoAtres[j]=0;
EncApag=1;
//GseisAtres
163
if (GseisAtres[j]==0)
GseisAtres[j]=1;
EncApag=2;
else
GseisAtres[j]=0;
EncApag=1;
// GsieteAtres
if (GsieteAtres[j]==0)
GsieteAtres[j]=1;
EncApag=2;
else
GsieteAtres[j]=0;
EncApag=1;
//Acá termina el tercer caso que contempla a GAE[] = 0,3,j
//EL CASO GAE[]= 0,4,j
if (GAE[0]==0 && GAE[1]==4 && GAE[2]==j)
//Para GceroAcuatro
if (GceroAcuatro[j]==0)

164
GceroAcuatro[j]=1;
EncApag=2;
else
GceroAcuatro[j]=0;
EncApag=1;
//GunoAcuatro
if (GunoAcuatro[j]==0)
GunoAcuatro[j]=1;
EncApag=2;
else
GunoAcuatro[j]=0;
EncApag=1;
//GdosAcuatro
if (GdosAcuatro[j]==0)
GdosAcuatro[j]=1;
EncApag=2;
else
GdosAcuatro[j]=0;
EncApag=1;
165
//GtresAcuatro
if (GtresAcuatro[j]==0)
GtresAcuatro[j]=1;
EncApag=2;
else
GtresAcuatro[j]=0;
EncApag=1;
//GcuatroAcuatro
if (GcuatroAcuatro[j]==0)
GcuatroAcuatro[j]=1;
EncApag=2;
else
GcuatroAcuatro[j]=0;
EncApag=1;
//GcincoAcuatro
if (GcincoAcuatro[j]==0)
GcincoAcuatro[j]=1;
EncApag=2;
166
else
GcincoAcuatro[j]=0;
EncApag=1;
//GseisAcuatro
if (GseisAcuatro[j]==0)
GseisAcuatro[j]=1;
EncApag=2;
else
GseisAcuatro[j]=0;
EncApag=1;
// GsieteAcuatro
if (GsieteAcuatro[j]==0)
GsieteAcuatro[j]=1;
EncApag=2;
else
GsieteAcuatro[j]=0;
EncApag=1;
167
//Acá termina el tercer caso que contempla a GAE[] = 0,4,j
//EL CASO GAE[]= 0,5,j
if (GAE[0]==0 && GAE[1]==5 && GAE[2]==j)
//Para GceroAcinco
if (GceroAcinco[j]==0)
GceroAcinco[j]=1;
EncApag=2;
else
GceroAcinco[j]=0;
EncApag=1;
//GunoAcinco
if (GunoAcinco[j]==0)
GunoAcinco[j]=1;
EncApag=2;
else
GunoAcinco[j]=0;
EncApag=1;
//GdosAcinco
if (GdosAcinco[j]==0)
168
GdosAcinco[j]=1;
EncApag=2;
else
GdosAcinco[j]=0;
EncApag=1;
//GtresAcinco
if (GtresAcinco[j]==0)
GtresAcinco[j]=1;
EncApag=2;
else
GtresAcinco[j]=0;
EncApag=1;
//GcuatroAcinco
if (GcuatroAcinco[j]==0)
GcuatroAcinco[j]=1;
EncApag=2;
else
GcuatroAcinco[j]=0;
EncApag=1;
169
//GcincoAcinco
if (GcincoAcinco[j]==0)
GcincoAcinco[j]=1;
EncApag=2;
else
GcincoAcinco[j]=0;
EncApag=1;
//GseisAcinco
if (GseisAcinco[j]==0)
GseisAcinco[j]=1;
EncApag=2;
else
GseisAcinco[j]=0;
EncApag=1;
// GsieteAcinco
if (GsieteAcinco[j]==0)
GsieteAcinco[j]=1;
EncApag=2;
170
else
GsieteAcinco[j]=0;
EncApag=1;
//Acá termina el tercer caso que contempla a GAE[] = 0,5,j
//EL CASO GAE[]= 0,6,j
if (GAE[0]==0 && GAE[1]==6 && GAE[2]==j)
//Para GceroAseis
if (GceroAseis[j]==0)
GceroAseis[j]=1;
EncApag=2;
else
GceroAseis[j]=0;
EncApag=1;
//GunoAseis
if (GunoAseis[j]==0)
GunoAseis[j]=1;
EncApag=2;
else
171
GunoAseis[j]=0;
EncApag=1;
//GdosAseis
if (GdosAseis[j]==0)
GdosAseis[j]=1;
EncApag=2;
else
GdosAseis[j]=0;
EncApag=1;
//GtresAseis
if (GtresAseis[j]==0)
GtresAseis[j]=1;
EncApag=2;
else
GtresAseis[j]=0;
EncApag=1;
//GcuatroAseis
if (GcuatroAseis[j]==0)

172
GcuatroAseis[j]=1;
EncApag=2;
else
GcuatroAseis[j]=0;
EncApag=1;
//GcincoAseis
if (GcincoAseis[j]==0)
GcincoAseis[j]=1;
EncApag=2;
else
GcincoAseis[j]=0;
EncApag=1;
//GseisAseis
if (GseisAseis[j]==0)
GseisAseis[j]=1;
EncApag=2;
else
GseisAseis[j]=0;
EncApag=1;
173
// GsieteAseis
if (GsieteAseis[j]==0)
GsieteAseis[j]=1;
EncApag=2;
else
GsieteAseis[j]=0;
EncApag=1;
//Acá termina el tercer caso que contempla a GAE[] = 0,6,j
//EL CASO GAE[]= 0,7,j
if (GAE[0]==0 && GAE[1]==7 && GAE[2]==j)
//Para GceroAsiete
if (GceroAsiete[j]==0)
GceroAsiete[j]=1;
EncApag=2;
else
GceroAsiete[j]=0;
EncApag=1;

174
//GunoAsiete
if (GunoAsiete[j]==0)
GunoAsiete[j]=1;
EncApag=2;
else
GunoAsiete[j]=0;
EncApag=1;
//GdosAsiete
if (GdosAsiete[j]==0)
GdosAsiete[j]=1;
EncApag=2;
else
GdosAsiete[j]=0;
EncApag=1;
//GtresAsiete
if (GtresAsiete[j]==0)
GtresAsiete[j]=1;
EncApag=2;
else
175
GtresAsiete[j]=0;
EncApag=1;
//GcuatroAsiete
if (GcuatroAsiete[j]==0)
GcuatroAsiete[j]=1;
EncApag=2;
else
GcuatroAsiete[j]=0;
EncApag=1;
//GcincoAsiete
if (GcincoAsiete[j]==0)
GcincoAsiete[j]=1;
EncApag=2;
else
GcincoAsiete[j]=0;
EncApag=1;
//GseisAsiete
if (GseisAsiete[j]==0)

176
GseisAsiete[j]=1;
EncApag=2;
else
GseisAsiete[j]=0;
EncApag=1;
// GsieteAsiete
if (GsieteAsiete[j]==0)
GsieteAsiete[j]=1;
EncApag=2;
else
GsieteAsiete[j]=0;
EncApag=1;
/*---------------------------------------------------------------------------------------------------
-----------------------------------------------------------------------------------------------------
-------Apartir de aquí se hace la comparacion de grupos----------------------------------------------
-----------------------------------------------------------------------------------------------------
-----------------------------------------------------------------------------------------------------*/
//Aquí es para definir los casos de activaciones grupales caso grupo 1
//Caso grupo 1

177
if (GAE[0]==1 && GAE[1]==0 && GAE[2]==0)
if (Grupo1 ==0)
for (m=0;m<8;m++)
Grupo1=1;
GunoAuno[m]=1;
GunoAdos[m]=1;
GunoAtres[m]=1;
GunoAcuatro[m]=1;
GunoAcinco[m]=1;
GunoAseis[m]=1;
GunoAsiete[m]=1;
EncApag=2;
else
for (m=0;m<8;m++)
Grupo1=0;
GunoAuno[m]=0;
GunoAdos[m]=0;
GunoAtres[m]=0;
GunoAcuatro[m]=0;
GunoAcinco[m]=0;
GunoAseis[m]=0;
GunoAsiete[m]=0;
EncApag=1;
178
//Aquí se define la activación del grupo 2
if (GAE[0]==2 && GAE[1]==0 && GAE[2]==0)
if (Grupo2 ==0)
for (m=0;m<8;m++)
Grupo2=1;
GdosAuno[m]=1;
GdosAdos[m]=1;
GdosAtres[m]=1;
GdosAcuatro[m]=1;
GdosAcinco[m]=1;
GdosAseis[m]=1;
GdosAsiete[m]=1;
EncApag=2;
else
for (m=0;m<8;m++)
Grupo2=0;
GdosAuno[m]=0;
GdosAdos[m]=0;
GdosAtres[m]=0;
GdosAcuatro[m]=0;
GdosAcinco[m]=0;
GdosAseis[m]=0;
GdosAsiete[m]=0;
EncApag=1;
179
//Aquí se define la activación del grupo 3
if (GAE[0]==3 && GAE[1]==0 && GAE[2]==0)
if (Grupo3 ==0)
for (m=0;m<8;m++)
Grupo3=1;
GtresAuno[m]=1;
GtresAdos[m]=1;
GtresAtres[m]=1;
GtresAcuatro[m]=1;
GtresAcinco[m]=1;
GtresAseis[m]=1;
GtresAsiete[m]=1;
EncApag=2;
else
for (m=0;m<8;m++)
Grupo3=0;
GtresAuno[m]=0;
GtresAdos[m]=0;
GtresAtres[m]=0;
GtresAcuatro[m]=0;
GtresAcinco[m]=0;
GtresAseis[m]=0;
GtresAsiete[m]=0;
EncApag=1;
180
//Aquí se define el la activación del grupo 4
if (GAE[0]==4 && GAE[1]==0 && GAE[2]==0)
if (Grupo4 ==0)
for (m=0;m<8;m++)
Grupo4=1;
GcuatroAuno[m]=1;
GcuatroAdos[m]=1;
GcuatroAtres[m]=1;
GcuatroAcuatro[m]=1;
GcuatroAcinco[m]=1;
GcuatroAseis[m]=1;
GcuatroAsiete[m]=1;
EncApag=2;
else
for (m=0;m<8;m++)
Grupo4=0;
GcuatroAuno[m]=0;
GcuatroAdos[m]=0;
GcuatroAtres[m]=0;
GcuatroAcuatro[m]=0;
GcuatroAcinco[m]=0;
GcuatroAseis[m]=0;

181
GcuatroAsiete[m]=0;
EncApag=1;
//Aquí se define el la activación del grupo 5
if (GAE[0]==5 && GAE[1]==0 && GAE[2]==0)
if (Grupo5 ==0)
for (m=0;m<8;m++)
Grupo5=1;
GcincoAuno[m]=1;
GcincoAdos[m]=1;
GcincoAtres[m]=1;
GcincoAcuatro[m]=1;
GcincoAcinco[m]=1;
GcincoAseis[m]=1;
GcincoAsiete[m]=1;
EncApag=2;
else
for (m=0;m<8;m++)
Grupo5=0;
GcincoAuno[m]=0;
GcincoAdos[m]=0;
GcincoAtres[m]=0;
GcincoAcuatro[m]=0;
182
GcincoAcinco[m]=0;
GcincoAseis[m]=0;
GcincoAsiete[m]=0;
EncApag=1;
//Aquí se define el la activación del grupo 6
if (GAE[0]==6 && GAE[1]==0 && GAE[2]==0)
if (Grupo6 ==0)
for (m=0;m<8;m++)
Grupo6=1;
GseisAuno[m]=1;
GseisAdos[m]=1;
GseisAtres[m]=1;
GseisAcuatro[m]=1;
GseisAcinco[m]=1;
GseisAseis[m]=1;
GseisAsiete[m]=1;
EncApag=2;
else
for (m=0;m<8;m++)
Grupo6=0;
GseisAuno[m]=0;
GseisAdos[m]=0;
183
GseisAtres[m]=0;
GseisAcuatro[m]=0;
GseisAcinco[m]=0;
GseisAseis[m]=0;
GseisAsiete[m]=0;
EncApag=1;
//Aquí se define el la activación del grupo 7
if (GAE[0]==7 && GAE[1]==0 && GAE[2]==0)
if (Grupo7 ==0)
for (m=0;m<8;m++)
Grupo7=1;
GsieteAuno[m]=1;
GsieteAdos[m]=1;
GsieteAtres[m]=1;
GsieteAcuatro[m]=1;
GsieteAcinco[m]=1;
GsieteAseis[m]=1;
GsieteAsiete[m]=1;
EncApag=2;
else
for (m=0;m<8;m++)
Grupo7=0;
184
GsieteAuno[m]=0;
GsieteAdos[m]=0;
GsieteAtres[m]=0;
GsieteAcuatro[m]=0;
GsieteAcinco[m]=0;
GsieteAseis[m]=0;
GsieteAsiete[m]=0;
EncApag=1;
/*---------------------------------------------------------------------------------------------------
-----------------------------------------------------------------------------------------------------
-------Apartir de aquí se hace la comparación de Ambientes-------------------------------------------
-----------------------------------------------------------------------------------------------------
-----------------------------------------------------------------------------------------------------*/
//Aquí es para definir los casos de activaciones grupales caso ambiente 1
if (GAE[0]==0 && GAE[1]==1 && GAE[2]==0)
if (Amb1 ==0)
for (m=0;m<8;m++)
Amb1=1;
GceroAuno[m]=1;
GunoAuno[m]=1;
GdosAuno[m]=1;
GtresAuno[m]=1;
GcuatroAuno[m]=1;
GcincoAuno[m]=1;
GseisAuno[m]=1;
185
GsieteAuno[m]=1;
EncApag=2;
else
for (m=0;m<8;m++)
Amb1=0;
GceroAuno[m]=0;
GunoAuno[m]=0;
GdosAuno[m]=0;
GtresAuno[m]=0;
GcuatroAuno[m]=0;
GcincoAuno[m]=0;
GseisAuno[m]=0;
GsieteAuno[m]=0;
EncApag=1;
//Aquí se define la activación del ambiente 2
if (GAE[0]==0 && GAE[1]==2 && GAE[2]==0)
if (Amb2 ==0)
for (m=0;m<8;m++)
Amb2=1;
GceroAdos[m]=1;
GunoAdos[m]=1;
GdosAdos[m]=1;
186
GtresAdos[m]=1;
GcuatroAdos[m]=1;
GcincoAdos[m]=1;
GseisAdos[m]=1;
GsieteAdos[m=1];
EncApag=2;
else
for (m=0;m<8;m++)
Amb2=0;
GceroAdos[m]=0;
GunoAdos[m]=0;
GdosAdos[m]=0;
GtresAdos[m]=0;
GcuatroAdos[m]=0;
GcincoAdos[m]=0;
GseisAdos[m]=0;
GsieteAdos[m]=0;
EncApag=1;
//Aquí se define la activación del ambiente 3
if (GAE[0]==0 && GAE[1]==3 && GAE[2]==0)
if (Amb3 ==0)
for (m=0;m<8;m++)

187
Amb3=1;
GceroAtres[m]=1;
GunoAdos[m]=1;
GdosAdos[m]=1;
GtresAdos[m]=1;
GcuatroAdos[m]=1;
GcincoAdos[m]=1;
GseisAdos[m]=1;
GsieteAdos[m]=1;
EncApag=2;
else
for (m=0;m<8;m++)
Amb3=0;
GceroAdos[m]=0;
GunoAdos[m]=0;
GdosAdos[m]=0;
GtresAdos[m]=0;
GcuatroAdos[m]=0;
GcincoAdos[m]=0;
GseisAdos[m]=0;
GsieteAdos[m]=0;
EncApag=1;
//Aquí se define la activación del ambiente 4
if (GAE[0]==0 && GAE[1]==4 && GAE[2]==0)
188
if (Amb4 ==0)
for (m=0;m<8;m++)
Amb4=1;
GceroAcuatro[m]=1;
GunoAcuatro[m]=1;
GdosAcuatro[m]=1;
GtresAcuatro[m]=1;
GcuatroAcuatro[m]=1;
GcincoAcuatro[m]=1;
GseisAcuatro[m]=1;
GsieteAcuatro[m]=1;
EncApag=2;
else
for (m=0;m<8;m++)
Amb4=0;
GceroAcuatro[m]=0;
GunoAcuatro[m]=0;
GdosAcuatro[m]=0;
GtresAcuatro[m]=0;
GcuatroAcuatro[m]=0;
GcincoAcuatro[m]=0;
GseisAcuatro[m]=0;
GsieteAcuatro[m]=0;
EncApag=1;
189
//Aqui se define la activación del ambiente 5
if (GAE[0]==0 && GAE[1]==5 && GAE[2]==0)
if (Amb5 ==0)
for (m=0;m<8;m++)
Amb5=1;
GceroAcinco[m]=1;
GunoAcinco[m]=1;
GdosAcinco[m]=1;
GtresAcinco[m]=1;
GcuatroAcinco[m]=1;
GcincoAcinco[m]=1;
GseisAcinco[m]=1;
GsieteAcinco[m]=1;
EncApag=2;
else
for (m=0;m<8;m++)
Amb5=0;
GceroAcinco[m]=0;
GunoAcinco[m]=0;
GdosAcinco[m]=0;
GtresAcinco[m]=0;
GcuatroAcinco[m]=0;
GcincoAcinco[m]=0;
GseisAcinco[m]=0;
GsieteAcinco[m]=0;
EncApag=1;
190
//Aquí se define la activación del ambiente 6
if (GAE[0]==0 && GAE[1]==6 && GAE[2]==0)
if (Amb6 ==0)
for (m=0;m<8;m++)
Amb6=1;
GceroAseis[m]=1;
GunoAseis[m]=1;
GdosAseis[m]=1;
GtresAseis[m]=1;
GcuatroAseis[m]=1;
GcincoAseis[m]=1;
GseisAseis[m]=1;
GsieteAseis[m]=1;
EncApag=2;
else
for (m=0;m<8;m++)
Amb6=0;
GceroAseis[m]=0;
GunoAseis[m]=0;
GdosAseis[m]=0;
GtresAseis[m]=0;
GcuatroAseis[m]=0;
191
GcincoAseis[m]=0;
GseisAseis[m]=0;
GsieteAseis[m]=0;
EncApag=1;
//Aquí se define la activación del ambiente 7
if (GAE[0]==0 && GAE[1]==7 && GAE[2]==0)
if (Amb7 ==0)
for (m=0;m<8;m++)
Amb7=1;
GceroAsiete[m]=1;
GunoAsiete[m]=1;
GdosAsiete[m]=1;
GtresAsiete[m]=1;
GcuatroAsiete[m]=1;
GcincoAsiete[m]=1;
GseisAsiete[m]=1;
GsieteAsiete[m]=1;
EncApag=2;
else
for (m=0;m<8;m++)
Amb7=0;
192
GceroAsiete[m]=0;
GunoAsiete[m]=0;
GdosAsiete[m]=0;
GtresAsiete[m]=0;
GcuatroAsiete[m]=0;
GcincoAsiete[m]=0;
GseisAsiete[m]=0;
GsieteAsiete[m]=0;
EncApag=1;
//Hasta aquí con las activaciones/desactivaciones de ambiente
/*---------------------------------------------------------------------------------------------------
-----------------------------------------------------------------------------------------------------
-------Apartir de aquí se envían los datos a los actuadores------------------------------------------
-----------------------------------------------------------------------------------------------------
-----------------------------------------------------------------------------------------------------*/
if (EncApag==1)
digitalWrite(E, LOW);
digitalWrite(A, HIGH);
delayMicroseconds(40);//Esta espera es para que el contador del circuito de los actuadores pueda pasar
de 0 a 1 y ahi enviar los datos de GAE
else if (EncApag==2)
digitalWrite(E, HIGH);
digitalWrite(A, LOW);
193
delayMicroseconds(40);
else
digitalWrite(E, LOW);
digitalWrite(A, LOW);
for (k=0;k<3;k++)
if (GAE[k]==0)
digitalWrite(BUSAC1, LOW);
digitalWrite(BUSAC2, LOW);
digitalWrite(BUSAC3, LOW);
else if (GAE[k]==1)
digitalWrite(BUSAC1, HIGH);
digitalWrite(BUSAC2, LOW);
digitalWrite(BUSAC3, LOW);
else if (GAE[k]==2)
digitalWrite(BUSAC1, LOW);
digitalWrite(BUSAC2, HIGH);
digitalWrite(BUSAC3, LOW);
else if (GAE[k]==3)
digitalWrite(BUSAC1, HIGH);
digitalWrite(BUSAC2, HIGH);
digitalWrite(BUSAC3, LOW);
194
else if (GAE[k]==4)
digitalWrite(BUSAC1, LOW);
digitalWrite(BUSAC2, LOW);
digitalWrite(BUSAC3, HIGH);
else if (GAE[k]==5)
digitalWrite(BUSAC1, HIGH);
digitalWrite(BUSAC2, LOW);
digitalWrite(BUSAC3, HIGH);
else if (GAE[k]==6)
digitalWrite(BUSAC1, LOW);
digitalWrite(BUSAC2, HIGH);
digitalWrite(BUSAC3, HIGH);
else if (GAE[k]==7)
digitalWrite(BUSAC1, HIGH);
digitalWrite(BUSAC2, HIGH);
digitalWrite(BUSAC3, HIGH);
else
digitalWrite(E, LOW);
digitalWrite(A, LOW);
delayMicroseconds(40);//Esto para que pase un ciclo completo y ponga el siguiente dato
//Después de pasada la escritura en el BUS de los actudores, ponga A y E en cero
digitalWrite(E, LOW);
digitalWrite(A, LOW);

195
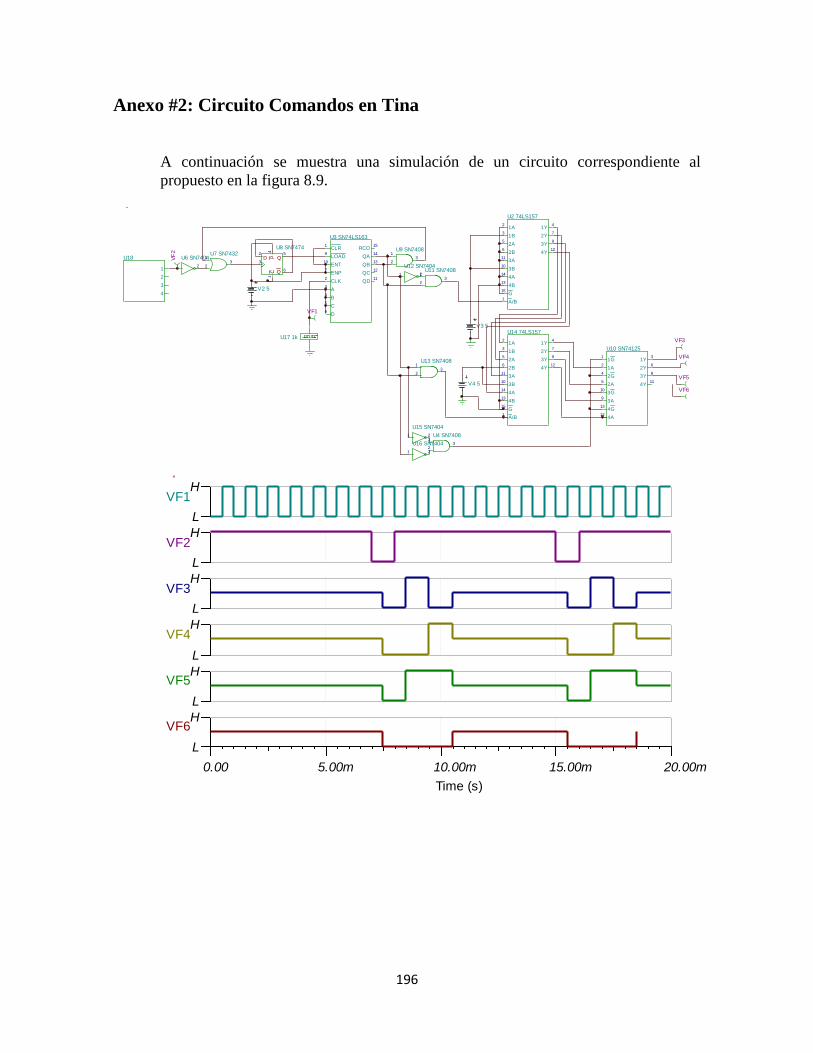
196
Anexo #2: Circuito Comandos en Tina
A continuación se muestra una simulación de un circuito correspondiente al
propuesto en la figura 8.9.
1A
1B
2A
2B
3A
3B
4A
4B
G
A/B
1Y
2Y
3Y
4Y
2
3
5
6
11
10
14
13
15
1
4
7
9
12
U2 74LS157
CLR
LOAD
ENT
ENP
CLK
A
B
C
D
RCO
QA
QB
QC
QD
1
9
10
7
2
3
4
5
6
15
14
13
12
11
U3 SN74LS163
1 2
U6 SN74041
23
U7 SN7432D
C Q
QP
2
3
16
5
4
U8 SN7474
V2 5
1
23
U9 SN7408
1G
1A
2G
2A
3G
3A
4G
4A
1Y
2Y
3Y
4Y
1
2
4
5
10
9
13
12
3
6
8
11
U10 SN74125
1
23
U11 SN74081 2
U12 SN7404
1
23
U13 SN7408
V3 5
1A
1B
2A
2B
3A
3B
4A
4B
G
A/B
1Y
2Y
3Y
4Y
2
3
5
6
11
10
14
13
15
1
4
7
9
12
U14 74LS157
V4 5
1
23
U4 SN74081 2
U15 SN7404
1 2
U16 SN7404
U17 1k
1
2
3
4
U18
VF1
VF
2
VF3
VF4
VF5
VF6
T
Time (s)
0.00 5.00m 10.00m 15.00m 20.00m
VF1
L
H
VF2
L
H
VF3
L
H
VF4
L
H
VF5
L
H
VF6
L
H

197
Anexo #3: Circuito Actuadores en Tina
A continuación se muestra una simulación de un circuito correspondiente al
propuesto en la figura 8.12.
J1
J1
J1
J1
J1
J1
J2
J2
J2
J2
J2
J2
J3
J3
J3
J3
J3
J1
J2
J3
J4
J3
J4
A0
B0
A1
B1
A2
B2
A3
B3
Ia>b
Ia<b
Ia=b
Oa>b
Oa=b
Oa<b
10
11
7
9
2
1
15
14
4
5
6
13
3
12
U1 4585
2
3
1
6
5
4U3 SN7474
2
3
1
6
5
4U2 SN7474
2
3
1
6
5
4U4 SN7474
2
3
1
6
5
4U5 SN7474
2
3
1
6
5
4U6 SN7474
2
3
1
6
5
4U7 SN7474
V2 5
A0
B0
A1
B1
A2
B2
A3
B3
Ia>b
Ia<b
Ia=b
Oa>b
Oa=b
Oa<b
10
11
7
9
2
1
15
14
4
5
6
13
3
12
U10 4585
A0
B0
A1
B1
A2
B2
A3
B3
Ia>b
Ia<b
Ia=b
Oa>b
Oa=b
Oa<b
10
11
7
9
2
1
15
14
4
5
6
13
3
12
U11 4585
A0
B0
A1
B1
A2
B2
A3
B3
Ia>b
Ia<b
Ia=b
Oa>b
Oa=b
Oa<b
10
11
7
9
2
1
15
14
4
5
6
13
3
12
U12 4585
A0
B0
A1
B1
A2
B2
A3
B3
Ia>b
Ia<b
Ia=b
Oa>b
Oa=b
Oa<b
10
11
7
9
2
1
15
14
4
5
6
13
3
12
U13 4585
A0
B0
A1
B1
A2
B2
A3
B3
Ia>b
Ia<b
Ia=b
Oa>b
Oa=b
Oa<b
10
11
7
9
2
1
15
14
4
5
6
13
3
12
U14 4585
V3 5
V1 5
V4 5
D
C Q
QP
2
3
1
6
5
4
U8 SN7474
V5 5
1
23
U9 SN7408
U15 4075
1213
12
U16 SN7411
1213
12
U17 SN7411
1
23
U18 SN7408
1
23
U19 SN7432
1
23
U20 SN7432
1 2
U21 SN7404
CLR
LOAD
ENT
ENP
CLK
A
B
C
D
RCO
QA
QB
QC
QD
1
9
10
7
2
3
4
5
6
15
14
13
12
11
U22 SN74LS163
V6 5
U23 1k
1
23
U26 SN7408
1
23
U30 SN7408
1
23
U28 SN7408
1
2
3
4
U29
1 2
U27 SN7404
1 2
U24 SN7404
VF
1
Encendido
Apagado
VF
2
VF
3
VF
4
Estado del Actuador
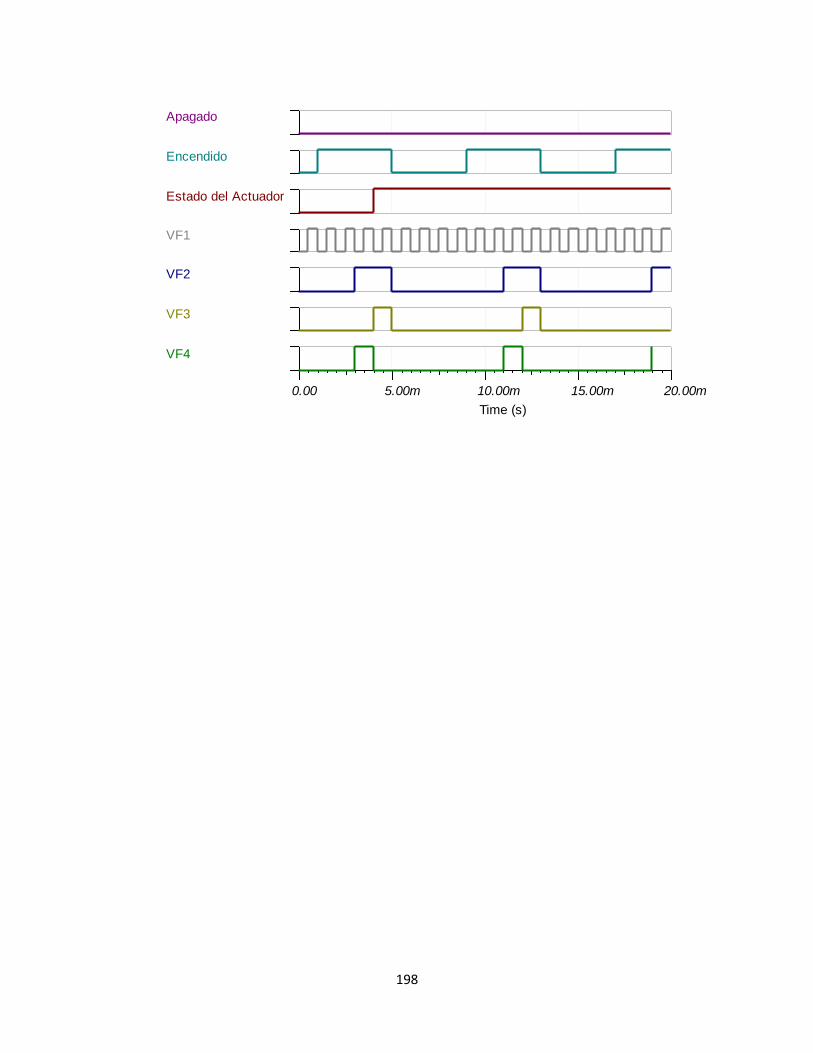
198
T
Time (s)
0.00 5.00m 10.00m 15.00m 20.00m
Apagado
Encendido
Estado del Actuador
VF1
VF2
VF3
VF4

199
Anexo #3: Modelo OSI [46]
Nace de la necesidad de estandarizar diferentes modelos de conexiones entre
sistemas de computación, para poder poner a interactuar dispositivos de diferentes marcas,
sin embargo desde entonces se ha utilizado para intercomunicar todo tipo de dispositivos
por medio de una red.
Consta de 7 capas, de las cuales, dependerá de la complejidad de la red, de los
dispositivos que se desean intercomunicar, y de la interacción con usuario final, si llegarán
a ser necesarias todas, o si se usarán menos. Lo importante del modelo es que se requiere
como máximo 7 capas para establecer una conexión entre dispositivos por medio de una
red, las cuales son: la capa de nivel físico, la capa de enlace, la capa de red, la capa de
transporte, la capa de sesión, la capa de presentación y finalmente la capa de aplicación. En
la figura a continuación se muestra la forma en que el emisor de datos, así como el receptor
de datos ven estas capas.

200
Las capas de nivel físico, de enlace y de red se consideran las capas inferiores y se
encargan del direccionamiento de los paquetes. La capa de transporte se encarga del
transporte de los datos y la capa de aplicación, presentación y sesión se consideran las
capas superiores y son las que están más cerca del usuario final.
En capa física se ve todo lo que tiene que ver con la transmisión binaria de los datos
a través de los medios físicos.
En la capa de enlace se manipulan los direccionamientos físicos (o “MAC” address,
lo cual son direcciones que ya vienen quemadas en el equipo) de los datos de elemento a
elemento. Utiliza las direcciones físicas para saber a dónde tiene que enviar los datos.
En el nivel de red se utiliza el direccionamiento de tipo lógico o IP. Maneja todo lo
que tiene que ver con enrutar paquetes y determinar rutas (como los routers, los cuales leen
y entienden el direccionamiento de tipo lógico o IP y basados en esta información envían
sus paquetes fuera de las interfaces).
En la capa de nivel de transporte se ve todo lo relacionado con transporte de
paquetes de extremo a extremo. Aquí trabajan dos protocolos TCP y UDP (existen

201
aplicaciones que trabajan para TCP y otras para UDP, lo cual dependerá de el nivel de
seguridad en el envío que se les quiera agregar al dato). El primero (TCP), una vez que el
dato ha llegado a su destinatario, devuelve la información de que ya llegó a su dirección de
origen. La manera en que el protocolo TCP logra esta función es por medio del “Three way
Handshake” que básicamente, trata de que cuando entre dos dispositivos A y B se quiere
dar un transporte de datos, el dispositivo A le envía al dispositivo B un aviso de que esto va
a ocurrir, junto con su dirección, con lo que el dispositivo B le devuelve su dirección junto
con un aviso de que recibió el mensaje de que se quieren enviar datos. Luego, el dispositivo
A le envía de vuelta un acuse de envío de datos junto con una secuencia de establecimiento
de conexión. Una vez que esto ocurre, se establece la conexión entre el dispositivo A y B.
Si en alguna parte de este procedimiento no se envía o no se recibe alguna secuencia del
Three Way Handshake, se informa al dispositivo que quiere enviar los datos acerca del
error para que vuelva a empezar el proceso del envío de ese segmento perdido.
El protocolo UDP no presenta esta característica, solamente envía el dato y tiene
una cabecera bastante sencilla, no es orientada a conexiones debido a que si se pierde un
dato, simplemente se perdió y listo. Un ejemplo de esto es la transmisión de la voz, pues no
posee sentido que si se pierde algún paquete de voz en tiempo real se retransmita (ya la
conexión no iría en tiempo real). Ambas aplicaciones manejan los números de puertos que
son lógicos (asignados por el administrador). La ventaja que tendría el UDP es que su
cabecera sería mucho más sencilla y corta por lo que su transmisión seria más veloz.
Las capas superiores están más cerca del usuario final. Capa de sesión, capa de
presentación y capa de aplicación La primera se encarga de que se puedan tener varias
sesiones abiertas (una página de internet abierta, y luego una sesión FTP, una sesión

202
independiente para cada aplicación). En la siguiente, se formatean los datos para que
puedan ser entendibles con el usuario y legibles cuando lleguen a la última capa final, la
cual es la que se dirige directamente al usuario final y el mismo se comunica con el sistema
creando el dato que se desea transmitir.
Cada capa esencialmente lo que hace es integrar cabeceras o “headers” al dato del
usuario, que es en otras palabras, información extra que se le agrega a los datos que está
enviando el usuario para el control de los mismos. Cada capa agrega una cabecera con su
contenido de información. Por ejemplo, la capa 4 agregaría la información de cómo va a ser
transportado el dato, la capa 3 de direcciones IP de origen y de destino del contenido, la
capa 2 agregaría la información de direcciones físicas de origen y de destino (direcciones
físicas). Además en esta capa 2 se le agrega a la información lo que se conoce como un
tráiler FCS (Frame Check Sequence) lo cual es un conjunto de bits que se le adjuntan para
chequear CRC (Ciclic Redundant Check), con la finalidad de verificar la integridad de la
información recibida. Toda esta información es convertida a unos y ceros y es transmitida a
través del cable en el nivel físico.