examining the impact of driving style on the...
TRANSCRIPT

Examining the Impact of Driving Style on the Predictability andResponsiveness of the Driver: Real-world and Simulator Analysis
Anup Doshi and Mohan M. Trivedi
Abstract— Confronted with the broad range of personalitiesof drivers on the roads today, in-vehicle technology must beable to function either in spite of or in harmony with eachdriver’s style. Individual drivers act and respond in differentmanners under various conditions, and many Driver AssistanceSystems would benefit from some measure of the driver’slikely behaviors in these conditions. In this study we presentseveral measures of driving style and show how they correlatewith the predictability and responsiveness of the driver inseveral experimental conditions. In the first two experiments,one simulator and one real-world, we find that “aggressive”drivers are more consistent in behaviors and significantlymore predictable than “non-aggressive” drivers. In the thirdexperiment, however, we find that though “non-aggressive”drivers are less predictable, they are also significantly morereceptive of feedback from Driver Assistance Systems. Theseresults could affect the design, effectiveness, and feedbackmechanisms of future Driver Assistance Systems.
I. INTRODUCTION
In recent years numerous injuries and fatalities have oc-curred as a result of traffic collisions on roads worldwide,in spite of the proliferation of safety systems within the ve-hicle and environment. Researchers have recently developednovel approaches to advanced, intelligent Driver AssistanceSystems incorporating sensor data from the driver, vehicle,and surround [1], [2]. This “holistic” approach has been suc-cessful in creating active systems to predict driver behaviorsin a number of maneuvers [3], [4], [5], [6]. These systemswork by analyzing common patterns of behavior amonga population of drivers in naturalistic driving situations,and extracting the most indicative patterns for predictivepurposes.
These studies, though, neglect the notion that drivers mayhave independent styles which could influence their drivingbehavior in unique ways. These styles may make it difficultfor a pattern recognition system to detect common patternsacross entire populations of drivers.
The aim of this research is to reduce false alarms andannoyances given the particular driver’s style. Since everydriver behaves differently behind the wheel, and reactsdifferently to potential warnings and events, this driverassistance system should adaptively update and provide moresuitable recommendations based on the particular driver. Wepropose using data-driven approaches whereby we can dis-cover various categories of drivers; in the following researchwe assume, without loss of generality, just two categoriesof drivers, “aggressive” and “non-aggressive” drivers. We
Laboratory for Intelligent and Safe Automobiles (LISA), University ofCalifornia, San Diego, La Jolla, CA 92037. web: http://cvrr.ucsd.edu/LISA.
analyze various metrics, including lateral and longitudinalacceleration and jerk, that may distinguish these groupsof drivers; and how those measures correlate with variousnotions of driver “predictability” and “responsiveness.” Theresults in this paper draw on experimental data from bothsimulator and naturalistic real-world drives.
The remainder of the paper is organized as follows. Thenext section discusses some related works, as well as selectedmeasures of driving style. Section III includes an analysis ofsimulator-based data to determine the effectiveness of partic-ular style measures. Section IV then discusses a naturalisticdriving experiment where driver behaviors are predicted, andthe prediction confidences are analyzed in association withthe driver’s style. In Section V, we discuss the effects of anovel visual feedback mechanism on the different groups ofdrivers. Finally concluding remarks are in Section VI.
II. RELATED WORKS AND DRIVER STYLE METRICS
It has long been noted that drivers engage in vehicularmaneuvers in various ways, which may differ from personto person [7]. Some have argued that drivers may changetheir style within the course of a single drive. This has beenevidenced by the large amount of research into the causesand consequences of “road rage” [8]. Murphey et al. [9] haveexamined the longitudinal jerk statistics of individual driversin order to distinguish aggressive drivers and optimize fueleconomy.
Other studies have considered the notion that drivers mayconsistently behave differently than other drivers. Canale andMalan [10] analyzed longitudinal speed and acceleration, aswell as distance to and speed of a leading vehicle, to clusterdriver behaviors in “Stop-and-Go ACC” scenarios.
Several groups have patented driver style classifiers [11],[12]. These classifiers use parameters such as lateral andlongitudinal acceleration in different maneuvers and envi-ronments, to classify driver reaction times and “sportiness.”This information is then used to modify the dynamics of thevehicle, to respond better to the driver’s own style.
To the knowledge of the authors, this is the first studyto analyze the relative abilities of DASs to predict futurebehavior of drivers of different styles. Additionally, we reportthe effectiveness of ADAS feedback mechanisms on thedifferent classes of drivers.
A. Measures of Driving Style
In this study we consider several metrics of drivingstyle. These include acceleration, as well as the derivativeof acceleration, or jerk, in both lateral and longitudinal
2010 IEEE Intelligent Vehicles SymposiumUniversity of California, San Diego, CA, USAJune 21-24, 2010
TuD1.2
978-1-4244-7868-2/10/$26.00 ©2010 IEEE 232

directions. Jerk measures how quickly the driver acceleratesin a particular direction. It is presumed that more aggressivedrivers tend to accelerate faster and thus have higher jerkprofiles than non-aggressive drivers [9]. Where other studieshave included both brake and throttle data [10], we justconsider the acceleration, as that encodes information bothabout braking and throttling.
By examining lateral and longitudinal statistics, we areable to capture the relative behaviors of drivers in varioussituations. In particular, in the first two experiments in thisstudy, we focus on the behavior of drivers in highway lanechanges. This maneuver includes both lateral movement, andin many cases, to match speeds of the adjacent lane, a lanechange would include longitudinal acceleration as well. Inthe third experiment, we focus on a speed-compliance task,which has much greater correlation to longitudinal motions.
In the case of the naturalistic driving experiments inSection IV, lateral motion is determined from a commerciallyavailable lane departure warning system. Longitudinal infor-mation is derived from the vehicle sensors via the vehicle’sCAN Bus.
For each of these parameters, the most relevant informa-tion is encoded in the frequency and variability of accelera-tions. Thus we find it convenient to measure the standarddeviation of the distributions of accelerations and jerksover time. As an example, drivers who are less prone tosudden maneuvers will tend to have tighter distributions ofacceleration, and thus the variance of the distribution willdecrease.
Additionally, real-world highway driving involves interac-tion with the environment, and in particular with vehiclesaround the ego-vehicle. Aggressive drivers may act differ-ently when approaching or following slow lead vehicles.Thus we also record the average time gap between the ego-vehicle and the leading (preceding) vehicle. This informationcomes via an ACC radar system.
In summary, the following parameters are explored in thispaper to classify the driving style:• Std. Dev. of Longitudinal Acceleration, σlon−acc
• Std. Dev. of Longitudinal Jerk, σlon−jerk
• Std. Dev. of Lateral Acceleration, σlat−acc
• Std. Dev. of Lateral Jerk, σlat−jerk
• Average Time-gap to Lead Vehicle, mTTLV
III. EXPERIMENT 1: SIMULATOR-BASED ANALYSIS
The first set of experiments utilizes a driving simulator toexamine indicators of driver style and test the predictabilityof each class of drivers. In the experiments the driver iscued to change lanes on occasion, and otherwise tasked withmaintaining the current lane. The dynamics of the drive areextracted and used to classify the driver style, which is thenexamined in relation to the performance of the driver duringthe tasks.
A. Experimental Setup
The simulator testbed is shown and described in Fig-ure 1. The main monitor is configured to show a PC-based
Primary Monitor
Secondary Gaze/Head TrackerSecondary Monitor Steering Wheel
Subject
Fig. 1. Experimental setup of LISA-S testbed. The testbed includes a PC-based driving simulator, with graphics shown on a 52-inch monitor, audioand a steering-wheel controller. The PC also controls a secondary monitor,located at an angle of 55◦ with respect to the driver, in a similar location towhere the rearview mirror would be. The testbed includes a head and eye-gaze tracking system, as well as a vision-based upper-body tracking system(not used in this experiment). All the data from the gaze and body trackersare recorded synchronously with steering data and other parameters fromthe driving simulator.
interactive open source “racing” simulator, TORCS [13],which was modified to use a two-lane highway with afixed maximum speed, to approach realistic driving. In thisparticular experiment the track contained no other vehicles,to limit the complexity of interactions and better analyze thedynamics of lane changes.
After taking time to acclimatize themselves to the simula-tor, the subject’s comfort level was verified by subsequentlybeing asked to keep the vehicle in a single lane for at least60 seconds. For the remainder of the experiment, the subjectwas tasked with maintaining the current lane to the best oftheir ability. This allowed the subject to be actively engagedin the driving process throughout the experiment.
Occasionally then a cue to change lanes would come fromthe secondary monitor, whose entire screen would changecolor suddenly, at a set of predefined times unknown to thesubject. Upon noticing the change, the driver was tasked withmaneuvering to the appropriate lane as soon as was safe todo so.
A total of 10 subjects participated in the experiment, ofvarying age, driving experience, and simulator experience.Each data collection segment included about 10 minutes ofdata, with 10-15 lane changes per subject.
B. Data Analysis
For each of the drivers, the distributions of lateral andlongitudinal jerk and acceleration were calculated over thewhole drive. Over time, the distribution of σlat−jerk didnot change greatly, as indicated by Figure 2. This measureshowed consistency over time, and thus was chosen as thebest candidate to classify the style of the driver. As seen inFigure 2, a clear cluster of drivers emerges who acceleratewith less force than others. These two groups are separatedinto “aggressive” and “non-aggressive” drivers.
233
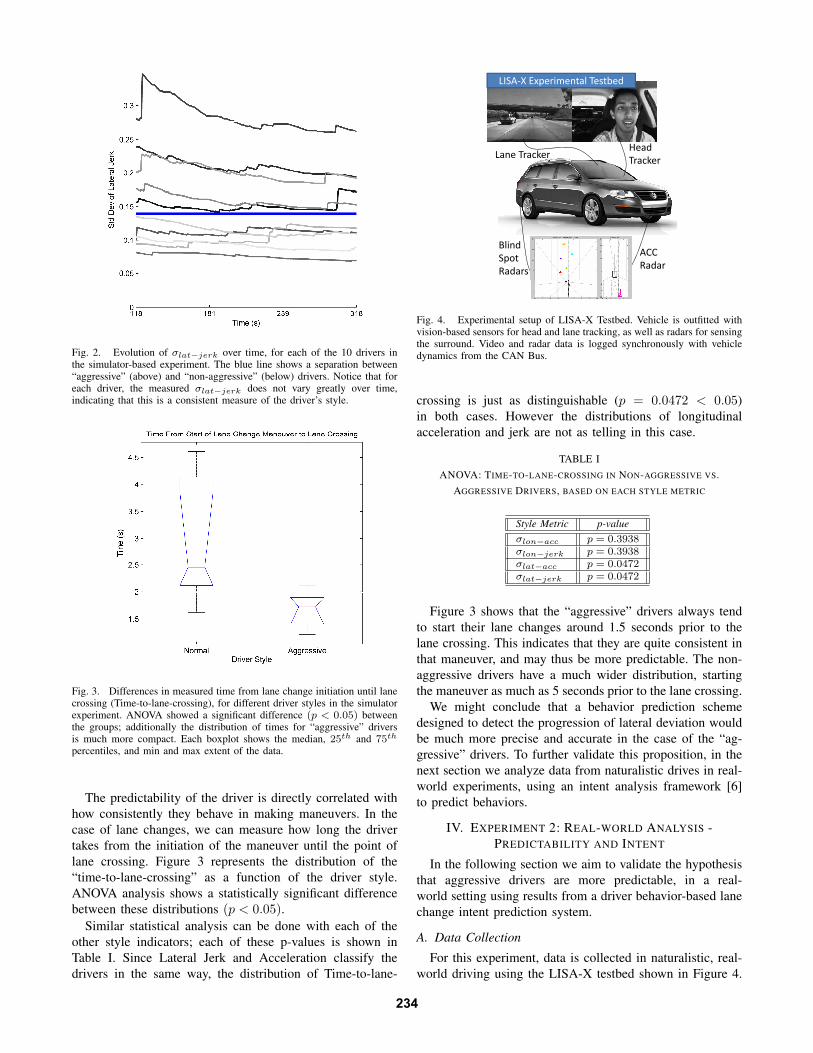
Fig. 2. Evolution of σlat−jerk over time, for each of the 10 drivers inthe simulator-based experiment. The blue line shows a separation between“aggressive” (above) and “non-aggressive” (below) drivers. Notice that foreach driver, the measured σlat−jerk does not vary greatly over time,indicating that this is a consistent measure of the driver’s style.
Fig. 3. Differences in measured time from lane change initiation until lanecrossing (Time-to-lane-crossing), for different driver styles in the simulatorexperiment. ANOVA showed a significant difference (p < 0.05) betweenthe groups; additionally the distribution of times for “aggressive” driversis much more compact. Each boxplot shows the median, 25th and 75th
percentiles, and min and max extent of the data.
The predictability of the driver is directly correlated withhow consistently they behave in making maneuvers. In thecase of lane changes, we can measure how long the drivertakes from the initiation of the maneuver until the point oflane crossing. Figure 3 represents the distribution of the“time-to-lane-crossing” as a function of the driver style.ANOVA analysis shows a statistically significant differencebetween these distributions (p < 0.05).
Similar statistical analysis can be done with each of theother style indicators; each of these p-values is shown inTable I. Since Lateral Jerk and Acceleration classify thedrivers in the same way, the distribution of Time-to-lane-
LISA‐X Experimental Testbed
Lane TrackerHead Tracker
ACC Radar
Blind Spot Radars
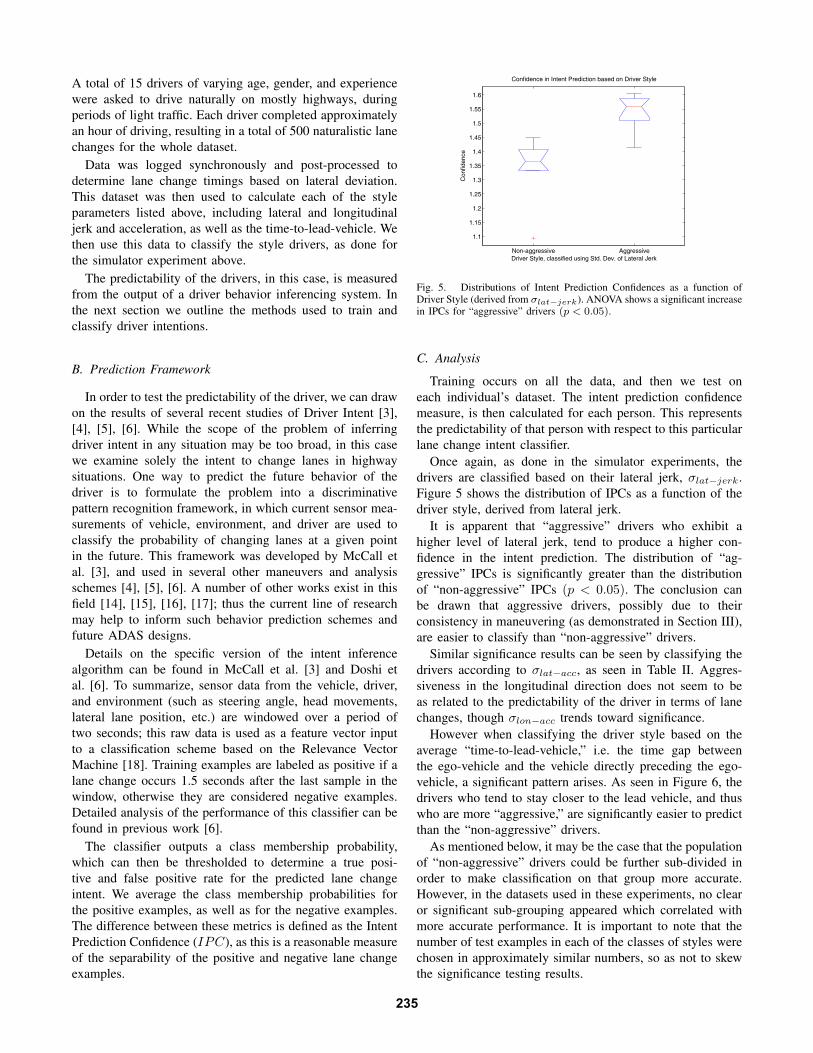
Fig. 4. Experimental setup of LISA-X Testbed. Vehicle is outfitted withvision-based sensors for head and lane tracking, as well as radars for sensingthe surround. Video and radar data is logged synchronously with vehicledynamics from the CAN Bus.
crossing is just as distinguishable (p = 0.0472 < 0.05)in both cases. However the distributions of longitudinalacceleration and jerk are not as telling in this case.
TABLE IANOVA: TIME-TO-LANE-CROSSING IN NON-AGGRESSIVE VS.
AGGRESSIVE DRIVERS, BASED ON EACH STYLE METRIC
Style Metric p-valueσlon−acc p = 0.3938σlon−jerk p = 0.3938σlat−acc p = 0.0472σlat−jerk p = 0.0472
Figure 3 shows that the “aggressive” drivers always tendto start their lane changes around 1.5 seconds prior to thelane crossing. This indicates that they are quite consistent inthat maneuver, and may thus be more predictable. The non-aggressive drivers have a much wider distribution, startingthe maneuver as much as 5 seconds prior to the lane crossing.
We might conclude that a behavior prediction schemedesigned to detect the progression of lateral deviation wouldbe much more precise and accurate in the case of the “ag-gressive” drivers. To further validate this proposition, in thenext section we analyze data from naturalistic drives in real-world experiments, using an intent analysis framework [6]to predict behaviors.
IV. EXPERIMENT 2: REAL-WORLD ANALYSIS -PREDICTABILITY AND INTENT
In the following section we aim to validate the hypothesisthat aggressive drivers are more predictable, in a real-world setting using results from a driver behavior-based lanechange intent prediction system.
A. Data Collection
For this experiment, data is collected in naturalistic, real-world driving using the LISA-X testbed shown in Figure 4.
234
A total of 15 drivers of varying age, gender, and experiencewere asked to drive naturally on mostly highways, duringperiods of light traffic. Each driver completed approximatelyan hour of driving, resulting in a total of 500 naturalistic lanechanges for the whole dataset.
Data was logged synchronously and post-processed todetermine lane change timings based on lateral deviation.This dataset was then used to calculate each of the styleparameters listed above, including lateral and longitudinaljerk and acceleration, as well as the time-to-lead-vehicle. Wethen use this data to classify the style drivers, as done forthe simulator experiment above.
The predictability of the drivers, in this case, is measuredfrom the output of a driver behavior inferencing system. Inthe next section we outline the methods used to train andclassify driver intentions.
B. Prediction Framework
In order to test the predictability of the driver, we can drawon the results of several recent studies of Driver Intent [3],[4], [5], [6]. While the scope of the problem of inferringdriver intent in any situation may be too broad, in this casewe examine solely the intent to change lanes in highwaysituations. One way to predict the future behavior of thedriver is to formulate the problem into a discriminativepattern recognition framework, in which current sensor mea-surements of vehicle, environment, and driver are used toclassify the probability of changing lanes at a given pointin the future. This framework was developed by McCall etal. [3], and used in several other maneuvers and analysisschemes [4], [5], [6]. A number of other works exist in thisfield [14], [15], [16], [17]; thus the current line of researchmay help to inform such behavior prediction schemes andfuture ADAS designs.
Details on the specific version of the intent inferencealgorithm can be found in McCall et al. [3] and Doshi etal. [6]. To summarize, sensor data from the vehicle, driver,and environment (such as steering angle, head movements,lateral lane position, etc.) are windowed over a period oftwo seconds; this raw data is used as a feature vector inputto a classification scheme based on the Relevance VectorMachine [18]. Training examples are labeled as positive if alane change occurs 1.5 seconds after the last sample in thewindow, otherwise they are considered negative examples.Detailed analysis of the performance of this classifier can befound in previous work [6].
The classifier outputs a class membership probability,which can then be thresholded to determine a true posi-tive and false positive rate for the predicted lane changeintent. We average the class membership probabilities forthe positive examples, as well as for the negative examples.The difference between these metrics is defined as the IntentPrediction Confidence (IPC), as this is a reasonable measureof the separability of the positive and negative lane changeexamples.
Non-aggressive Aggressive
1.1
1.15
1.2
1.25
1.3
1.35
1.4
1.45
1.5
1.55
1.6
Con
fiden
ce
Driver Style, classified using Std. Dev. of Lateral Jerk
Confidence in Intent Prediction based on Driver Style
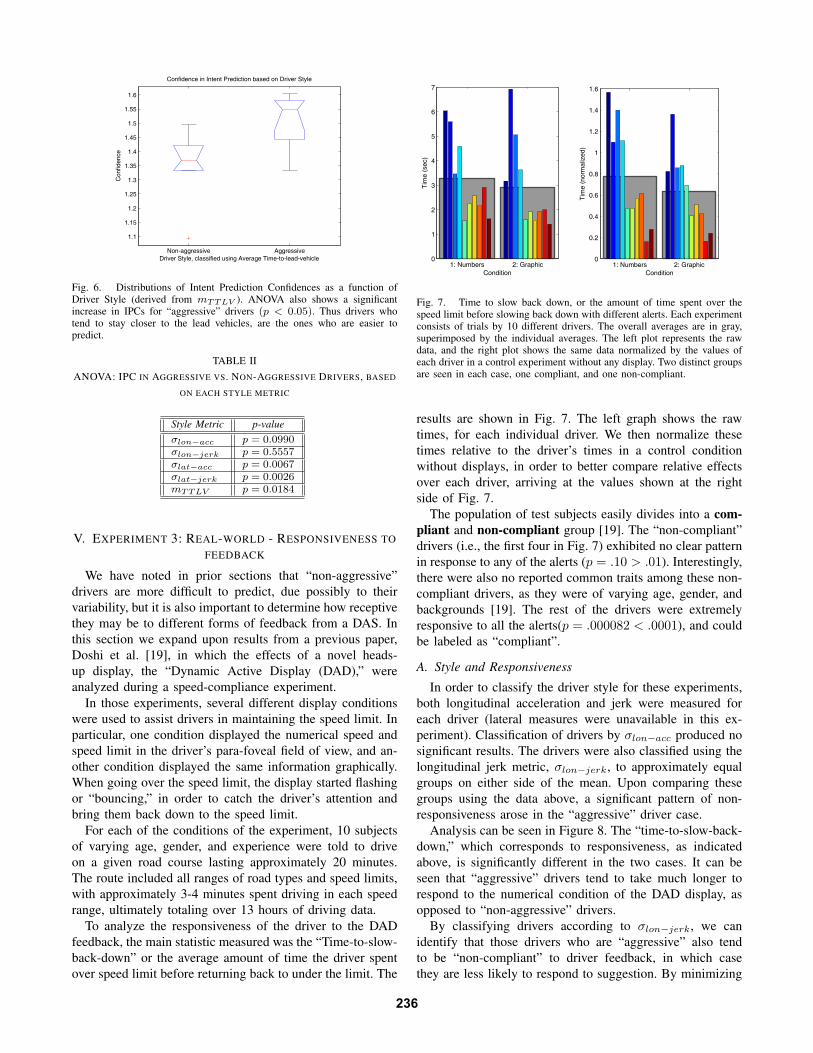
Fig. 5. Distributions of Intent Prediction Confidences as a function ofDriver Style (derived from σlat−jerk). ANOVA shows a significant increasein IPCs for “aggressive” drivers (p < 0.05).
C. Analysis
Training occurs on all the data, and then we test oneach individual’s dataset. The intent prediction confidencemeasure, is then calculated for each person. This representsthe predictability of that person with respect to this particularlane change intent classifier.
Once again, as done in the simulator experiments, thedrivers are classified based on their lateral jerk, σlat−jerk.Figure 5 shows the distribution of IPCs as a function of thedriver style, derived from lateral jerk.
It is apparent that “aggressive” drivers who exhibit ahigher level of lateral jerk, tend to produce a higher con-fidence in the intent prediction. The distribution of “ag-gressive” IPCs is significantly greater than the distributionof “non-aggressive” IPCs (p < 0.05). The conclusion canbe drawn that aggressive drivers, possibly due to theirconsistency in maneuvering (as demonstrated in Section III),are easier to classify than “non-aggressive” drivers.
Similar significance results can be seen by classifying thedrivers according to σlat−acc, as seen in Table II. Aggres-siveness in the longitudinal direction does not seem to beas related to the predictability of the driver in terms of lanechanges, though σlon−acc trends toward significance.
However when classifying the driver style based on theaverage “time-to-lead-vehicle,” i.e. the time gap betweenthe ego-vehicle and the vehicle directly preceding the ego-vehicle, a significant pattern arises. As seen in Figure 6, thedrivers who tend to stay closer to the lead vehicle, and thuswho are more “aggressive,” are significantly easier to predictthan the “non-aggressive” drivers.
As mentioned below, it may be the case that the populationof “non-aggressive” drivers could be further sub-divided inorder to make classification on that group more accurate.However, in the datasets used in these experiments, no clearor significant sub-grouping appeared which correlated withmore accurate performance. It is important to note that thenumber of test examples in each of the classes of styles werechosen in approximately similar numbers, so as not to skewthe significance testing results.
235
Non-aggressive Aggressive
1.1
1.15
1.2
1.25
1.3
1.35
1.4
1.45
1.5
1.55
1.6
Con
fiden
ce
Driver Style, classified using Average Time-to-lead-vehicle
Confidence in Intent Prediction based on Driver Style
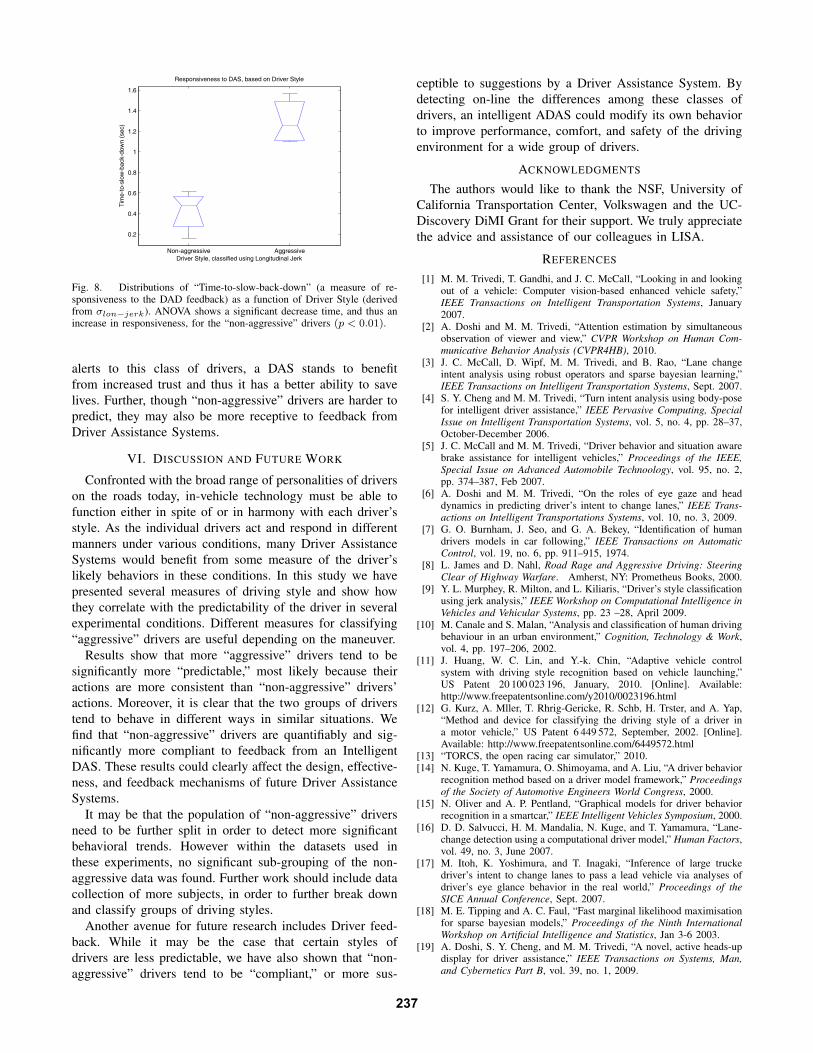
Fig. 6. Distributions of Intent Prediction Confidences as a function ofDriver Style (derived from mTTLV ). ANOVA also shows a significantincrease in IPCs for “aggressive” drivers (p < 0.05). Thus drivers whotend to stay closer to the lead vehicles, are the ones who are easier topredict.
TABLE IIANOVA: IPC IN AGGRESSIVE VS. NON-AGGRESSIVE DRIVERS, BASED
ON EACH STYLE METRIC
Style Metric p-valueσlon−acc p = 0.0990σlon−jerk p = 0.5557σlat−acc p = 0.0067σlat−jerk p = 0.0026mTTLV p = 0.0184
V. EXPERIMENT 3: REAL-WORLD - RESPONSIVENESS TOFEEDBACK
We have noted in prior sections that “non-aggressive”drivers are more difficult to predict, due possibly to theirvariability, but it is also important to determine how receptivethey may be to different forms of feedback from a DAS. Inthis section we expand upon results from a previous paper,Doshi et al. [19], in which the effects of a novel heads-up display, the “Dynamic Active Display (DAD),” wereanalyzed during a speed-compliance experiment.
In those experiments, several different display conditionswere used to assist drivers in maintaining the speed limit. Inparticular, one condition displayed the numerical speed andspeed limit in the driver’s para-foveal field of view, and an-other condition displayed the same information graphically.When going over the speed limit, the display started flashingor “bouncing,” in order to catch the driver’s attention andbring them back down to the speed limit.
For each of the conditions of the experiment, 10 subjectsof varying age, gender, and experience were told to driveon a given road course lasting approximately 20 minutes.The route included all ranges of road types and speed limits,with approximately 3-4 minutes spent driving in each speedrange, ultimately totaling over 13 hours of driving data.
To analyze the responsiveness of the driver to the DADfeedback, the main statistic measured was the “Time-to-slow-back-down” or the average amount of time the driver spentover speed limit before returning back to under the limit. The
1: Numbers 2: Graphic0
1
2
3
4
5
6
7
Condition
Tim
e (s
ec)
1: Numbers 2: Graphic0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Condition
Tim
e (n
orm
aliz
ed)
Fig. 7. Time to slow back down, or the amount of time spent over thespeed limit before slowing back down with different alerts. Each experimentconsists of trials by 10 different drivers. The overall averages are in gray,superimposed by the individual averages. The left plot represents the rawdata, and the right plot shows the same data normalized by the values ofeach driver in a control experiment without any display. Two distinct groupsare seen in each case, one compliant, and one non-compliant.
results are shown in Fig. 7. The left graph shows the rawtimes, for each individual driver. We then normalize thesetimes relative to the driver’s times in a control conditionwithout displays, in order to better compare relative effectsover each driver, arriving at the values shown at the rightside of Fig. 7.
The population of test subjects easily divides into a com-pliant and non-compliant group [19]. The “non-compliant”drivers (i.e., the first four in Fig. 7) exhibited no clear patternin response to any of the alerts (p = .10 > .01). Interestingly,there were also no reported common traits among these non-compliant drivers, as they were of varying age, gender, andbackgrounds [19]. The rest of the drivers were extremelyresponsive to all the alerts(p = .000082 < .0001), and couldbe labeled as “compliant”.
A. Style and Responsiveness
In order to classify the driver style for these experiments,both longitudinal acceleration and jerk were measured foreach driver (lateral measures were unavailable in this ex-periment). Classification of drivers by σlon−acc produced nosignificant results. The drivers were also classified using thelongitudinal jerk metric, σlon−jerk, to approximately equalgroups on either side of the mean. Upon comparing thesegroups using the data above, a significant pattern of non-responsiveness arose in the “aggressive” driver case.
Analysis can be seen in Figure 8. The “time-to-slow-back-down,” which corresponds to responsiveness, as indicatedabove, is significantly different in the two cases. It can beseen that “aggressive” drivers tend to take much longer torespond to the numerical condition of the DAD display, asopposed to “non-aggressive” drivers.
By classifying drivers according to σlon−jerk, we canidentify that those drivers who are “aggressive” also tendto be “non-compliant” to driver feedback, in which casethey are less likely to respond to suggestion. By minimizing
236
Non-aggressive Aggressive
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Tim
e-to
-slo
w-b
ack-
dow
n (s
ec)
Driver Style, classified using Longitudinal Jerk
Responsiveness to DAS, based on Driver Style
Fig. 8. Distributions of “Time-to-slow-back-down” (a measure of re-sponsiveness to the DAD feedback) as a function of Driver Style (derivedfrom σlon−jerk). ANOVA shows a significant decrease time, and thus anincrease in responsiveness, for the “non-aggressive” drivers (p < 0.01).
alerts to this class of drivers, a DAS stands to benefitfrom increased trust and thus it has a better ability to savelives. Further, though “non-aggressive” drivers are harder topredict, they may also be more receptive to feedback fromDriver Assistance Systems.
VI. DISCUSSION AND FUTURE WORK
Confronted with the broad range of personalities of driverson the roads today, in-vehicle technology must be able tofunction either in spite of or in harmony with each driver’sstyle. As the individual drivers act and respond in differentmanners under various conditions, many Driver AssistanceSystems would benefit from some measure of the driver’slikely behaviors in these conditions. In this study we havepresented several measures of driving style and show howthey correlate with the predictability of the driver in severalexperimental conditions. Different measures for classifying“aggressive” drivers are useful depending on the maneuver.
Results show that more “aggressive” drivers tend to besignificantly more “predictable,” most likely because theiractions are more consistent than “non-aggressive” drivers’actions. Moreover, it is clear that the two groups of driverstend to behave in different ways in similar situations. Wefind that “non-aggressive” drivers are quantifiably and sig-nificantly more compliant to feedback from an IntelligentDAS. These results could clearly affect the design, effective-ness, and feedback mechanisms of future Driver AssistanceSystems.
It may be that the population of “non-aggressive” driversneed to be further split in order to detect more significantbehavioral trends. However within the datasets used inthese experiments, no significant sub-grouping of the non-aggressive data was found. Further work should include datacollection of more subjects, in order to further break downand classify groups of driving styles.
Another avenue for future research includes Driver feed-back. While it may be the case that certain styles ofdrivers are less predictable, we have also shown that “non-aggressive” drivers tend to be “compliant,” or more sus-
ceptible to suggestions by a Driver Assistance System. Bydetecting on-line the differences among these classes ofdrivers, an intelligent ADAS could modify its own behaviorto improve performance, comfort, and safety of the drivingenvironment for a wide group of drivers.
ACKNOWLEDGMENTS
The authors would like to thank the NSF, University ofCalifornia Transportation Center, Volkswagen and the UC-Discovery DiMI Grant for their support. We truly appreciatethe advice and assistance of our colleagues in LISA.
REFERENCES
[1] M. M. Trivedi, T. Gandhi, and J. C. McCall, “Looking in and lookingout of a vehicle: Computer vision-based enhanced vehicle safety,”IEEE Transactions on Intelligent Transportation Systems, January2007.
[2] A. Doshi and M. M. Trivedi, “Attention estimation by simultaneousobservation of viewer and view,” CVPR Workshop on Human Com-municative Behavior Analysis (CVPR4HB), 2010.
[3] J. C. McCall, D. Wipf, M. M. Trivedi, and B. Rao, “Lane changeintent analysis using robust operators and sparse bayesian learning,”IEEE Transactions on Intelligent Transportation Systems, Sept. 2007.
[4] S. Y. Cheng and M. M. Trivedi, “Turn intent analysis using body-posefor intelligent driver assistance,” IEEE Pervasive Computing, SpecialIssue on Intelligent Transportation Systems, vol. 5, no. 4, pp. 28–37,October-December 2006.
[5] J. C. McCall and M. M. Trivedi, “Driver behavior and situation awarebrake assistance for intelligent vehicles,” Proceedings of the IEEE,Special Issue on Advanced Automobile Technoology, vol. 95, no. 2,pp. 374–387, Feb 2007.
[6] A. Doshi and M. M. Trivedi, “On the roles of eye gaze and headdynamics in predicting driver’s intent to change lanes,” IEEE Trans-actions on Intelligent Transportations Systems, vol. 10, no. 3, 2009.
[7] G. O. Burnham, J. Seo, and G. A. Bekey, “Identification of humandrivers models in car following,” IEEE Transactions on AutomaticControl, vol. 19, no. 6, pp. 911–915, 1974.
[8] L. James and D. Nahl, Road Rage and Aggressive Driving: SteeringClear of Highway Warfare. Amherst, NY: Prometheus Books, 2000.
[9] Y. L. Murphey, R. Milton, and L. Kiliaris, “Driver’s style classificationusing jerk analysis,” IEEE Workshop on Computational Intelligence inVehicles and Vehicular Systems, pp. 23 –28, April 2009.
[10] M. Canale and S. Malan, “Analysis and classification of human drivingbehaviour in an urban environment,” Cognition, Technology & Work,vol. 4, pp. 197–206, 2002.
[11] J. Huang, W. C. Lin, and Y.-k. Chin, “Adaptive vehicle controlsystem with driving style recognition based on vehicle launching,”US Patent 20 100 023 196, January, 2010. [Online]. Available:http://www.freepatentsonline.com/y2010/0023196.html
[12] G. Kurz, A. Mller, T. Rhrig-Gericke, R. Schb, H. Trster, and A. Yap,“Method and device for classifying the driving style of a driver ina motor vehicle,” US Patent 6 449 572, September, 2002. [Online].Available: http://www.freepatentsonline.com/6449572.html
[13] “TORCS, the open racing car simulator,” 2010.[14] N. Kuge, T. Yamamura, O. Shimoyama, and A. Liu, “A driver behavior
recognition method based on a driver model framework,” Proceedingsof the Society of Automotive Engineers World Congress, 2000.
[15] N. Oliver and A. P. Pentland, “Graphical models for driver behaviorrecognition in a smartcar,” IEEE Intelligent Vehicles Symposium, 2000.
[16] D. D. Salvucci, H. M. Mandalia, N. Kuge, and T. Yamamura, “Lane-change detection using a computational driver model,” Human Factors,vol. 49, no. 3, June 2007.
[17] M. Itoh, K. Yoshimura, and T. Inagaki, “Inference of large truckedriver’s intent to change lanes to pass a lead vehicle via analyses ofdriver’s eye glance behavior in the real world,” Proceedings of theSICE Annual Conference, Sept. 2007.
[18] M. E. Tipping and A. C. Faul, “Fast marginal likelihood maximisationfor sparse bayesian models,” Proceedings of the Ninth InternationalWorkshop on Artificial Intelligence and Statistics, Jan 3-6 2003.
[19] A. Doshi, S. Y. Cheng, and M. M. Trivedi, “A novel, active heads-updisplay for driver assistance,” IEEE Transactions on Systems, Man,and Cybernetics Part B, vol. 39, no. 1, 2009.
237