example of weighted voting system undersea target detection system
Post on 21-Dec-2015
229 views
TRANSCRIPT
Example of Weighted Voting System
Undersea target detection system
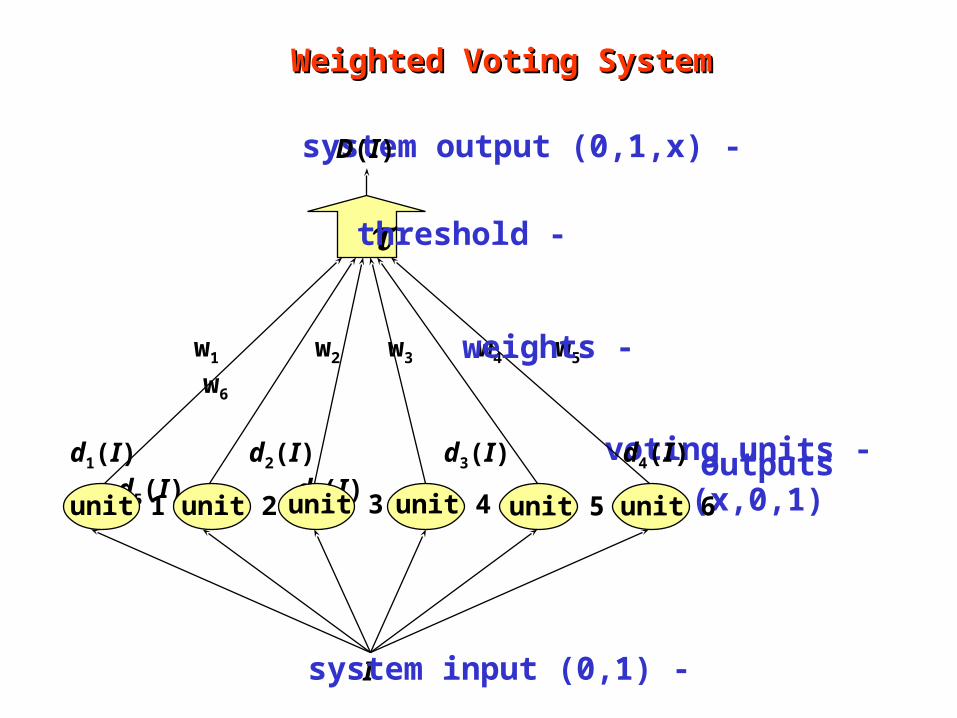
Weighted Voting SystemWeighted Voting System
-system output (0,1,x)
-voting units outputs (0,1,x)
d1(I) d2(I) d3(I) d4(I) d5(I) d6(I)
I
D(I)
w1 w2 w3 w4 w5 w6
unit 1 unit 2 unit 3 unit 4 unit 5 unit 6
-threshold
-system input (0,1)
-weights

.0if,
0),(if,0
0),(if,1
)(01
01011
01011
nn
nnnnn
nnnnn
WWx
WWWWW
WWWWW
ID
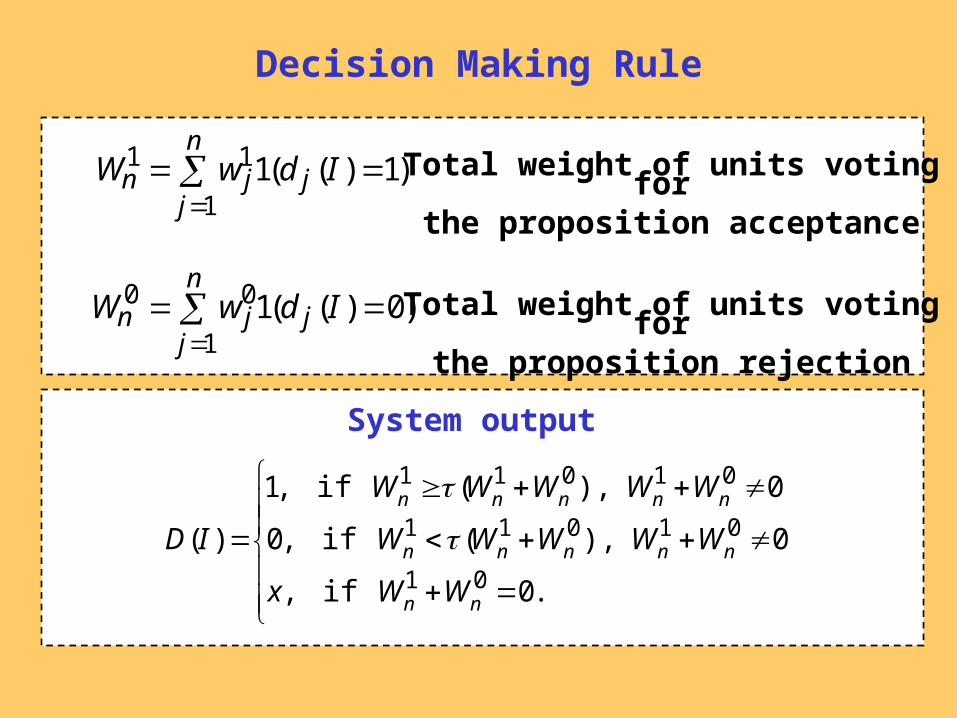
Decision Making Rule
)1)((11
1
n
jjjn IdwW Total weight of units voting for
the proposition acceptance
)0)((11
0
n
jjjn IdwW Total weight of units voting for
the proposition rejection
System output
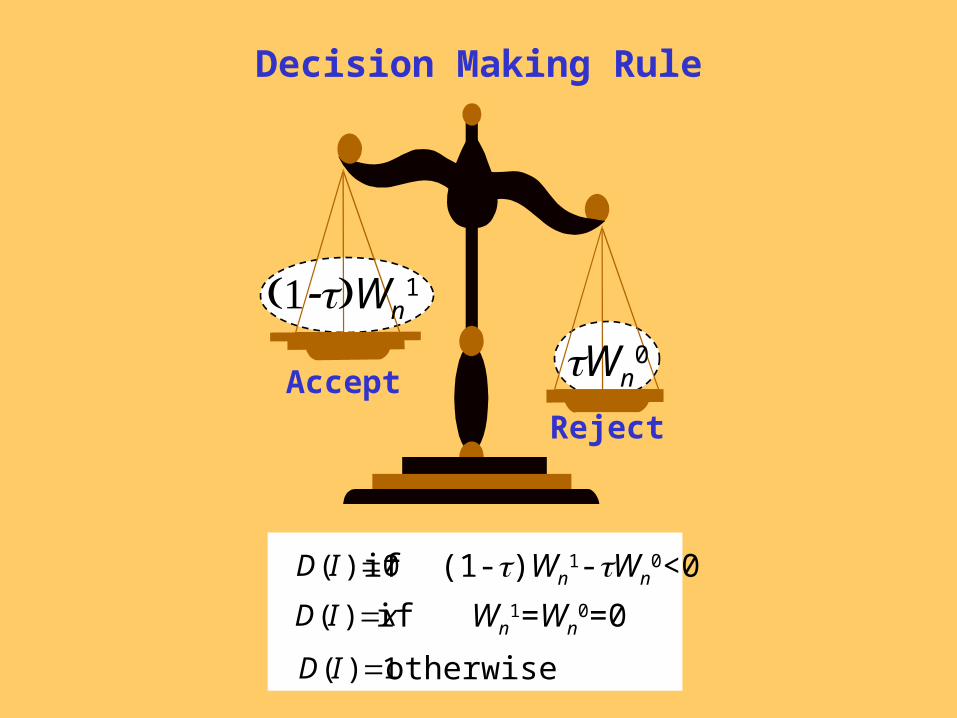
Decision Making Rule
0)( ID if (1-)Wn1-Wn
0<0
Wn0
Wn1
Accept
Reject
xID )( if Wn1=Wn
0=0
1)( ID otherwise

WVS as a Multi-state System
Voting unit j:
3 states:
4 failure modes:
dj(0)=1; dj(1)=0;
dj(0)=x; dj(1)=x.
x
d j 10
(1-)Wn1-Wn
0
Entire WVS:
Multiple states characterized by different scores
3 possible outputs:
4 failure modes:
D(0)=1; D(1)=0;
D(0)=x; D(1)=x.
x
D 10
Input I
10I
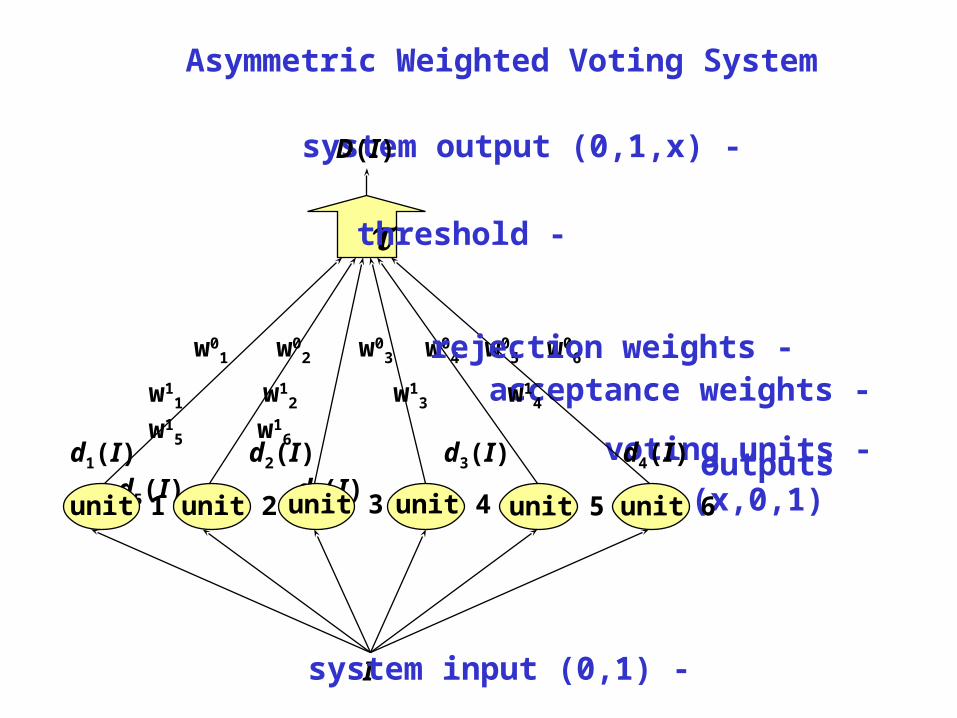
Asymmetric Weighted Voting System
-system output (0,1,x)
-voting units outputs (0,1,x)
-acceptance weights
d1(I) d2(I) d3(I) d4(I) d5(I) d6(I)
w11 w1
2 w13 w1
4 w15 w1
6
I
D(I)
w01 w0
2 w03 w0
4 w05 w0
6
unit 1 unit 2 unit 3 unit 4 unit 5 unit 6
-threshold
-system input (0,1)
-rejection weights
.0if,
0),(if,0
0),(if,1
)(01
01011
01011
nn
nnnnn
nnnnn
WWx
WWWWW
WWWWW
ID
Decision Making Rule
)1)((11
11
n
jjjn IdwW Total weight of units voting for
the proposition acceptance
)0)((11
00
n
jjjn IdwW Total weight of units voting for
the proposition rejection
System output
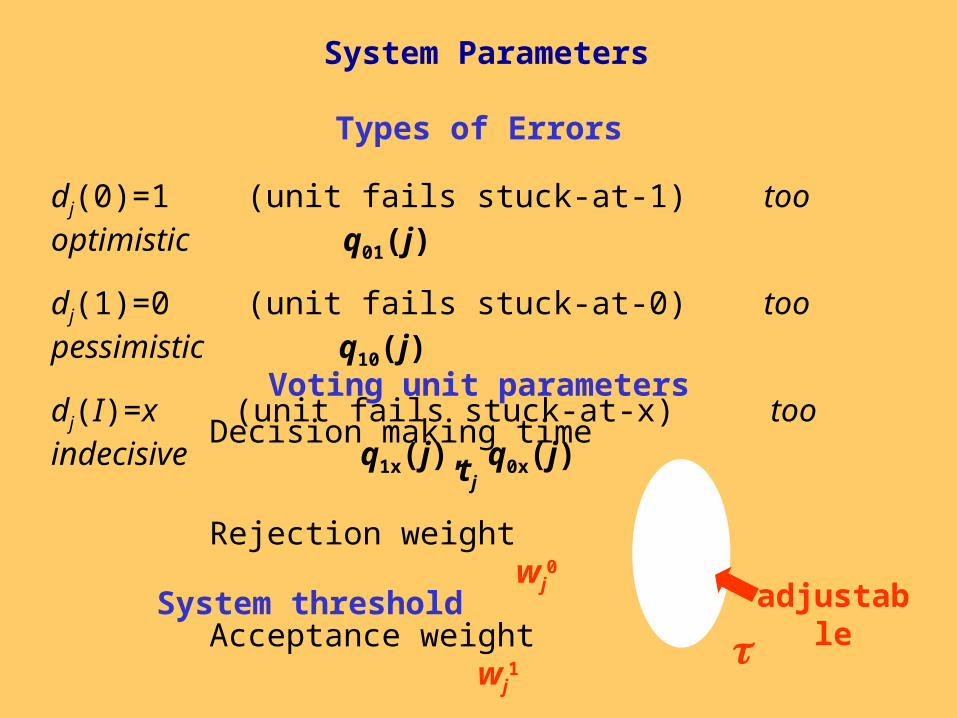
Types of Errors
dj(0)=1 (unit fails stuck-at-1) too optimistic q01(j)
dj(1)=0 (unit fails stuck-at-0) too pessimistic q10(j)
dj(I)=x (unit fails stuck-at-x) too indecisive q1x(j), q0x(j)
Voting unit parameters
Decision making time tj
Rejection weight wj0
Acceptance weight wj1
System threshold
System Parameters
adjustable

Universal generating function technique
Score distribution for m voters
01
)()()()( 000
0)1(
01jj w
xw
j zjqzjqzjqzu
)()()(
)...()()(
)()(
1
112
11
zuzUzU
zuzUzU
zuzU
mmm
K
k
H
h
K
k
jkGihGjkih
jkGjk
H
h
ihGihji zsszszszUzU
1 1 11)()()(
Score distribution for a single voter
Composition operator
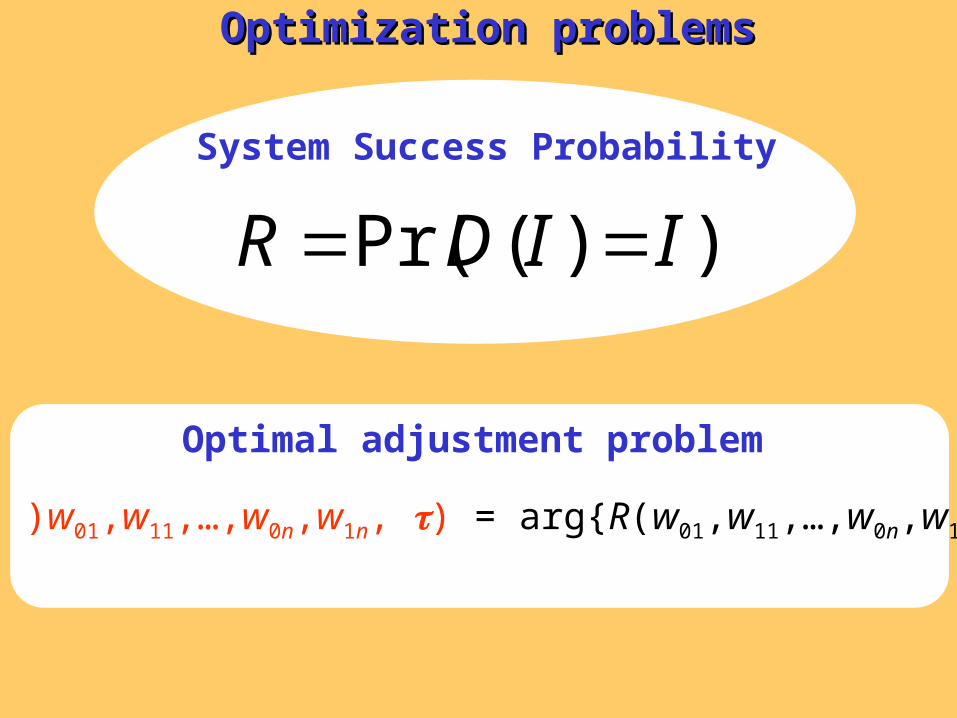
)w01,w11,…,w0n,w1n, ) = arg{R(w01,w11,…,w0n,w1n, )max}
))(Pr( IIDR System Success Probability
Optimal adjustment problem
Optimization problemsOptimization problems

1 4 5 2 6 3
w1 w4 w5 w2 w6 w3
1 2 3
21
0
Optimal grouping
R(w,,)max

VU 1 VU 2 VU 3 VU 4 VU 5 VU 6
w1 w2 w3 w4 w5 w6
P
d1(P) d2(P) d3(P) d4(P) d5(P) d6(P)
D(P)
PG 3PG2PG1
v
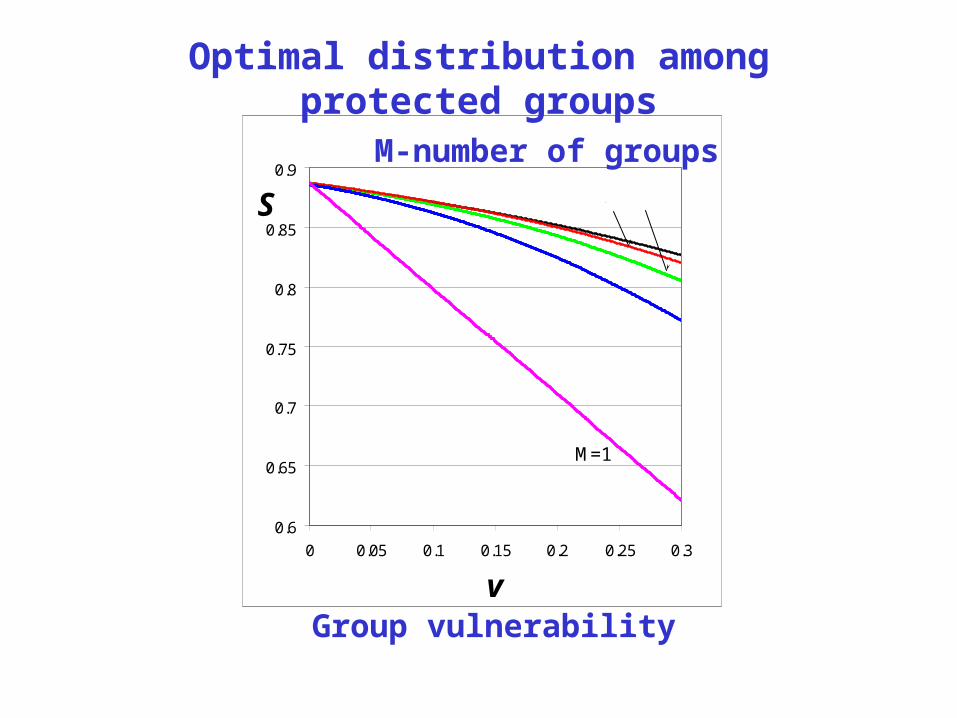
Optimal distribution among protected groups
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0 0.05 0.1 0.15 0.2 0.25 0.3
v
S
M=1
M=2
M=5 M=4
Optimal distribution among protected groups
Group vulnerability
M-number of groups
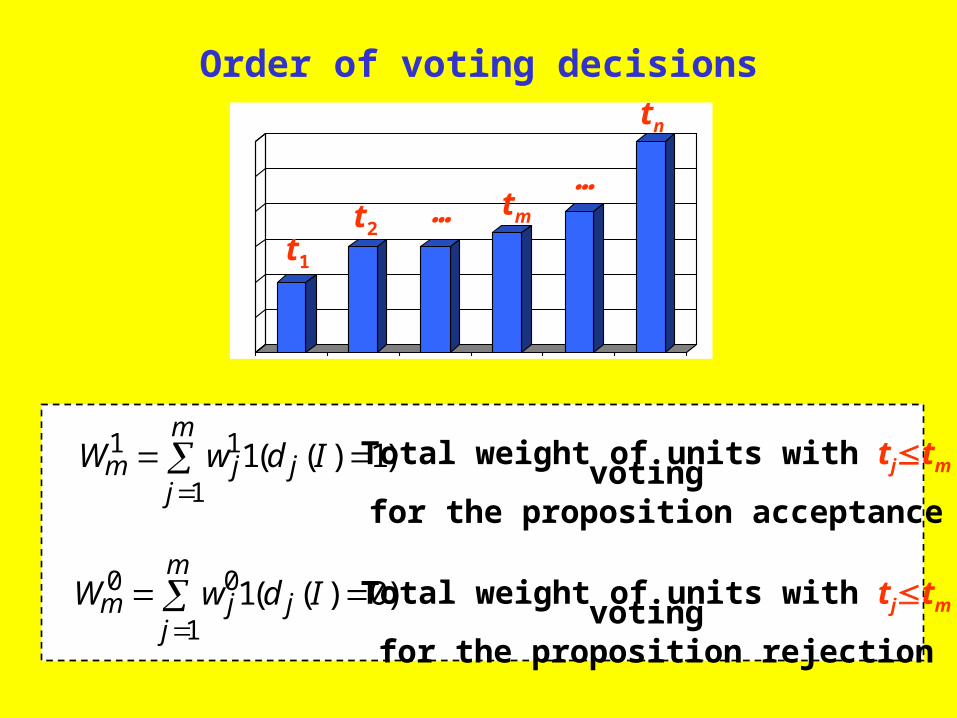
Order of voting decisions
)1)((11
11
m
jjjm IdwW Total weight of units with tjtm voting
for the proposition acceptance
)0)((11
00
m
jjjm IdwW Total weight of units with tjtm voting
for the proposition rejection
t1
t2tm
tn
……

n
mjm
jwV
1
111
n
mjm
jwV
1
001
Wm0
Wm0
Reject
V1m+1
Wm0
Accept
V0m+1
Wm0
Accelerated Decision Making
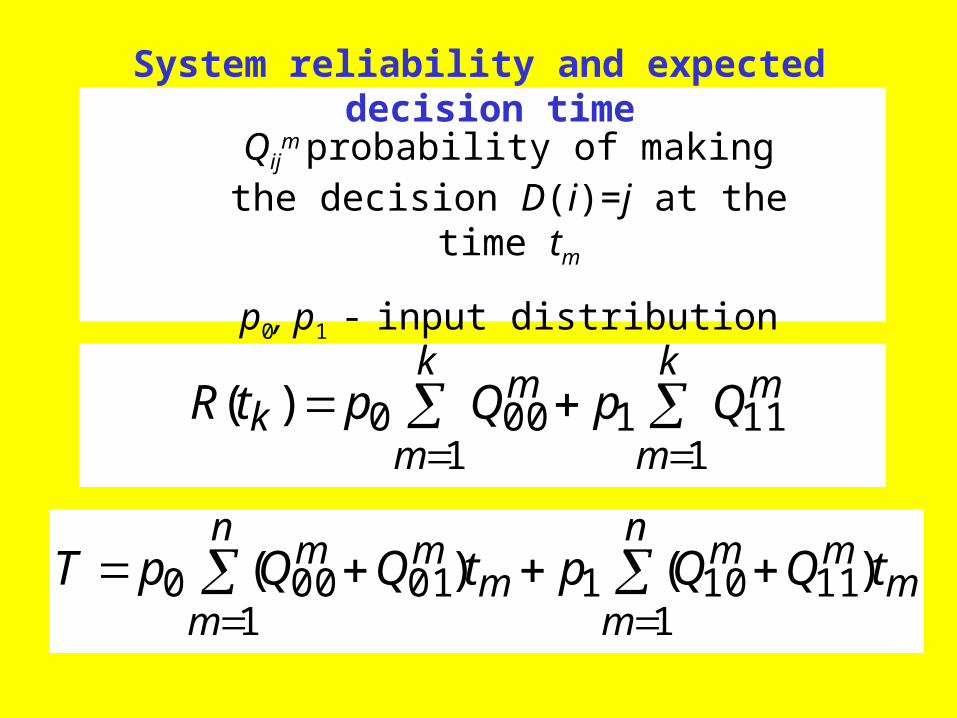
Qijm probability of making the decision
D(i)=j at the time tm
p0, p1 - input distribution
System reliability and expected decision time
mmm
n
mm
mmn
mtQQptQQpT )()( 1110
110100
10
mk
m
mk
mk QpQptR 11
1100
10)(

)w01,w11,…,w0n,w1n, ) = arg{R(w01,w11,…,w0n,w1n, )max}subject to T(w01,w11,…,w0n,w1n, )T*
RT
Voting system optimization problem
R max
T minTwo-objective problem:
Constrained problem: R max | T<T*

Numerical Example
No of unittjq01q0xq10q1x
1100.220.310.290.12
2120.350.070.1030.30
3380.240.080.220.15
4480.100.050.200.01
5550.080.100.150.07
6700.080.010.100.05
p0=0.7 p0=0.5p0=0.3
0.760.500.45
Q000.97980.90050.8477
Q010.02020.09950.1523
Q100.16110.07190.0283
Q110.83890.92810.97166
R0.93750.91430.9345
T34.99434.98734.994
Parameters of voting units
Parameters of optimal systemfor T*=35
0.77
0.82
0.87
0.92
0.97
15 20 25 30 35 40 45 50 55 60T
R
Po=0.7 Po=0.5 Po=0.3
Reliability vs. expected decision time

References1. Weighted voting systems: reliability versus rapidity, G. Levitin, Reliability Engineering &
System Safety, 89(2) pp.177-184 (2005).
2. Maximizing survivability of vulnerable weighted voting systems, G. Levitin, Reliability Engineering & System Safety, vol. 83, pp.17-26, (2003).
3. Threshold optimization for weighted voting classifiers, G. Levitin, Naval Research Logistics, vol. 50 (4), pp.322-344, (2003).
4. Asymmetric weighted voting systems, G. Levitin, Reliability Engineering & System Safety, vol. 76, pp.199-206, (2002).
5. Evaluating correct classification probability for weighted voting classifiers with plurality voting, G. Levitin, European Journal of Operational Research, vol. 141, pp.596-607, (2002).
6. Analysis and optimization of weighted voting systems consisting of voting units with limited availability, G. Levitin, Reliability Engineering & System Safety, vol. 73, pp. 91-100, (2001).
7. Optimal unit grouping in weighted voting systems, G. Levitin, Reliability Engineering & System Safety vol. 72, pp. 179-191, (2001).
8. Reliability optimization for weighted voting system, G. Levitin, A. Lisnianski, Reliability Engineering & System Safety, vol. 71, pp. 131-138, (2001).