exploring spatial networks with greedy navigators
TRANSCRIPT

Petter HolmeUmeå University, Sungkyunkwan University,Stockholm University, Institute for Future Studies
Sang Hoon LeeUmeå University, Oxford University



How can we measurenavigability?
What does optimallynavigable networks look like?

Full informationShortest paths

s
t
1
2
4
56
789
3
s
t
1
2
4
56
789
3

s
t
1
2
4
56
789
3
s
t
1
2
4
56
789
3

s
t
1
2
4
56
789
3
s
t
1
2
4
56
789
3

s
t
1
2
4
56
789
3
s
t
1
2
4
56
789
3

s
t
1
2
4
56
789
3
s
t
1
2
4
56
789
3

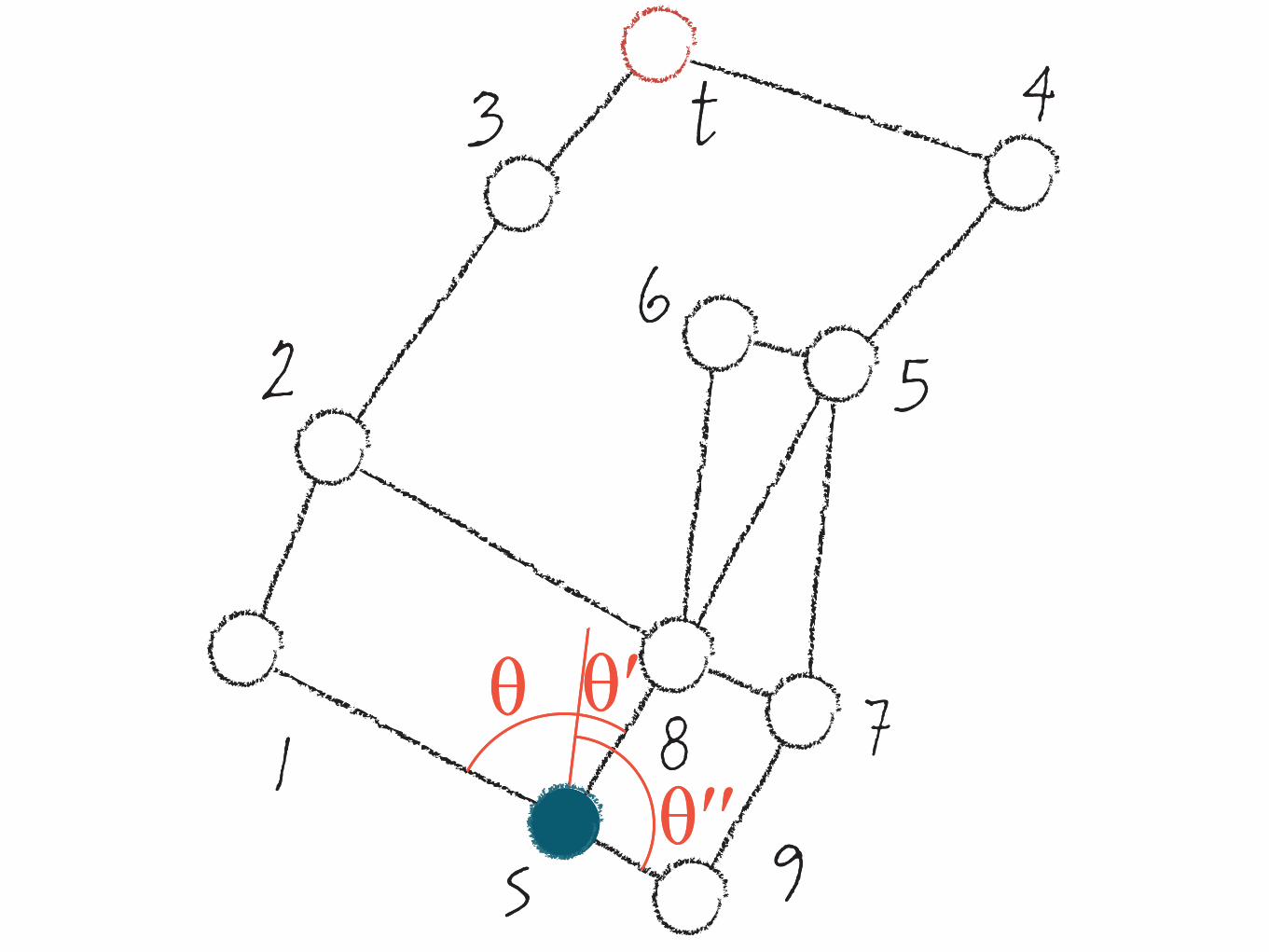
Partial informationGreedy navigators
s
t
1
2
4
56
789
3
ș șƍșƍƍ
s
t
1
2
4
56
789
3
ș șƍșƍƍ

s
t
1
2
4
56
789
3
s
t
1
2
4
56
789
3

s
t
1
2
4
56
789
3
s
t
1
2
4
56
789
3

s
t
1
2
4
56
789
3
s
t
1
2
4
56
789
3

s
t
1
2
4
56
789
3
s
t
1
2
4
56
789
3

s
t
1
2
4
56
789
3
s
t
1
2
4
56
789
3

s
t
1
2
4
56
789
3
s
t
1
2
4
56
789
3

(Greedy navigator) navigability
Avg. distanceAvg. distance for greedy navigators
Rg =

(Greedy navigator) navigability
Avg. distanceAvg. distance for random navigators
Rg =
random navigators perform a random DFS



Rg = 33% Rr = 24%
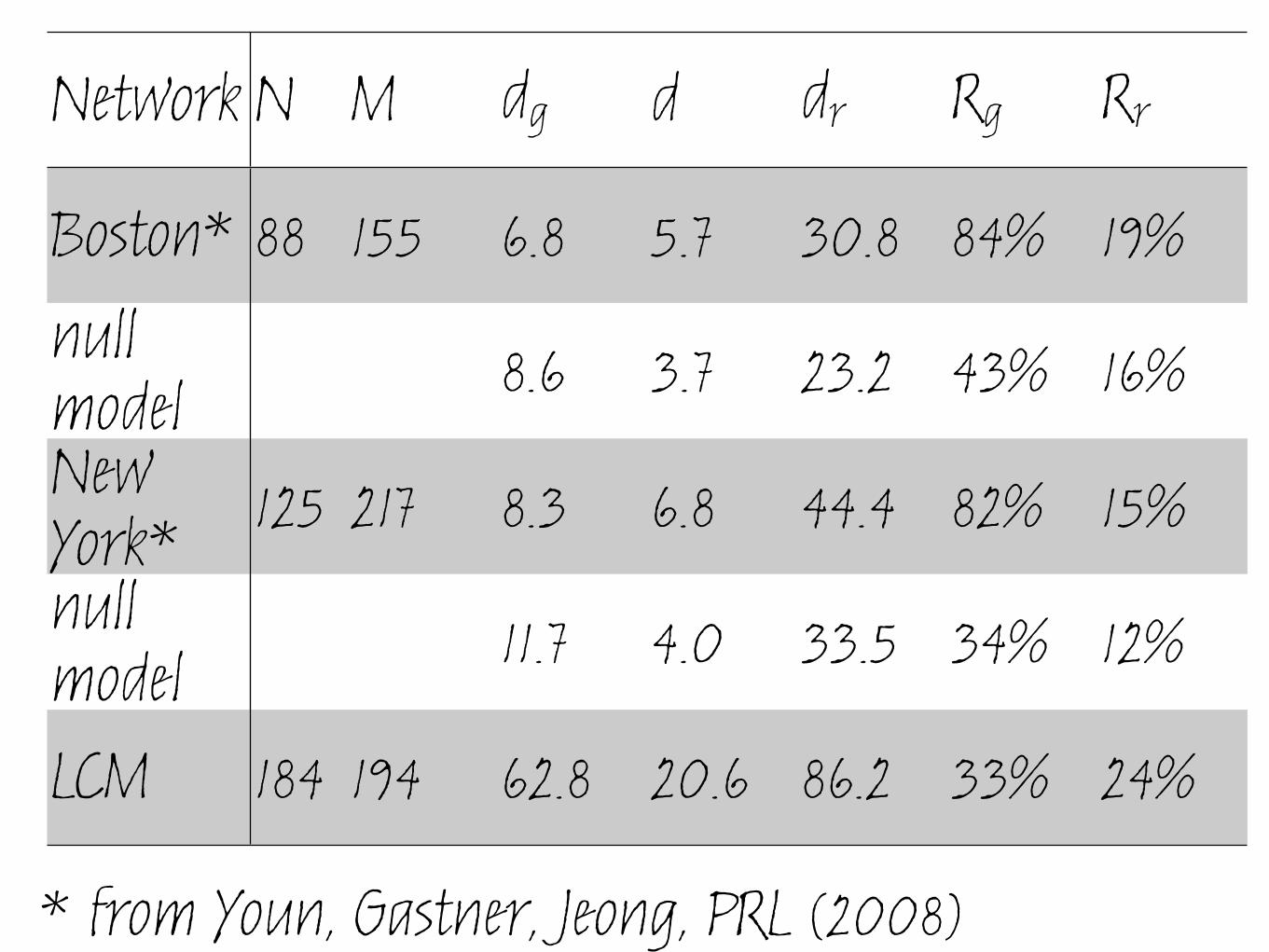
Network N M dg d dr Rg Rr
Boston* 88 155 6.8 5.7 30.8 84% 19%null model 8.6 3.7 23.2 43% 16%New York* 125 217 8.3 6.8 44.4 82% 15%null model 11.7 4.0 33.5 34% 12%
LCM 184 194 62.8 20.6 86.2 33% 24%
* from Youn, Gastner, Jeong, PRL (2008)

Navigator essentiality

–8–7–6–5
–6–4–20
–81
43
2
ln |e|

–7–6–5
–5
0
–104 3
12
ln |e|

Optimizing spatial networkfor greedy navigators
Fixed vertices, growing

Boston roads

MST

graph distance
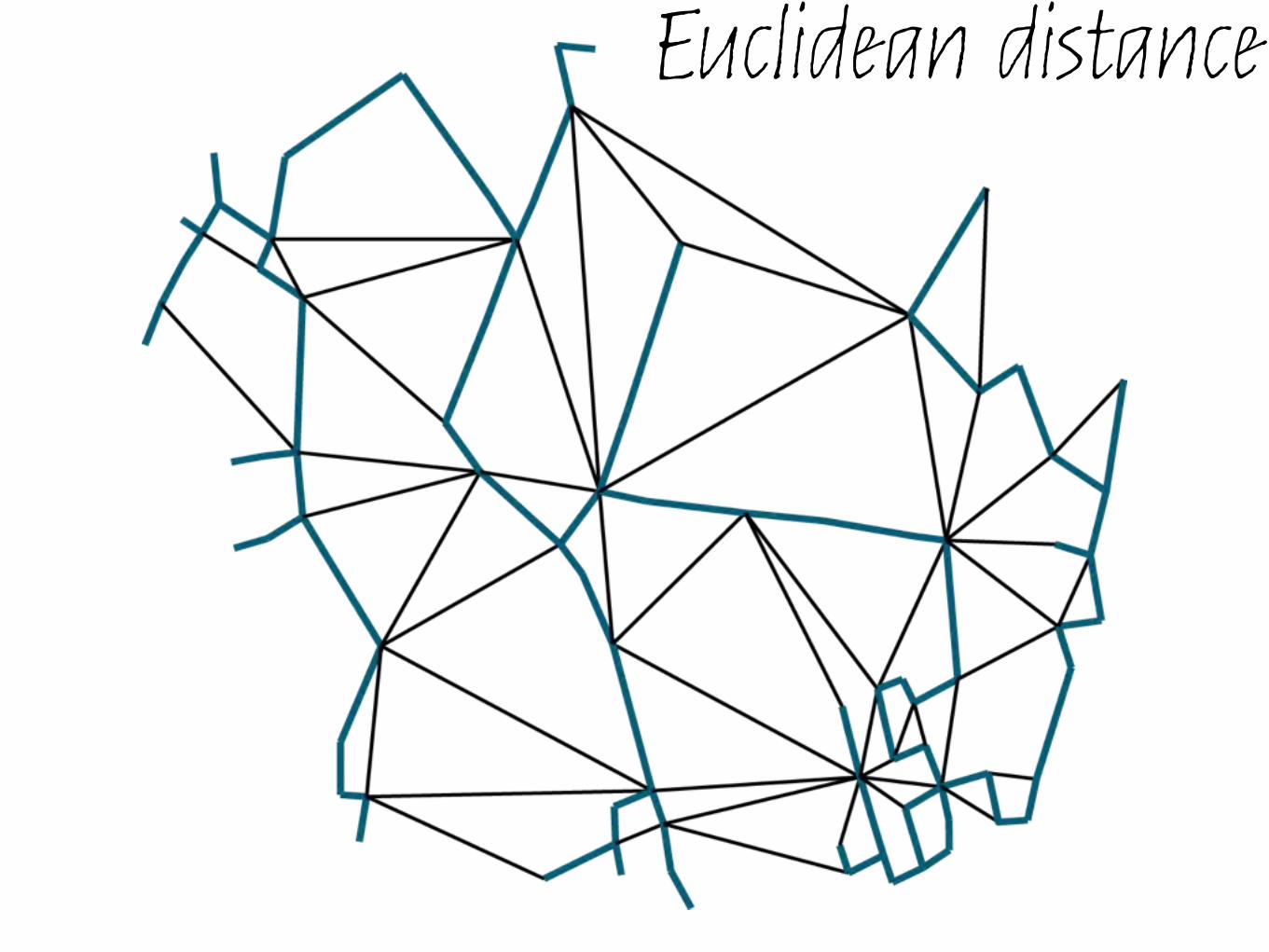
Euclidean distance

Optimizing spatial networkfor greedy navigators
Fixed vertices




Optimizing spatial networkfor greedy navigators
Not fixed vertices


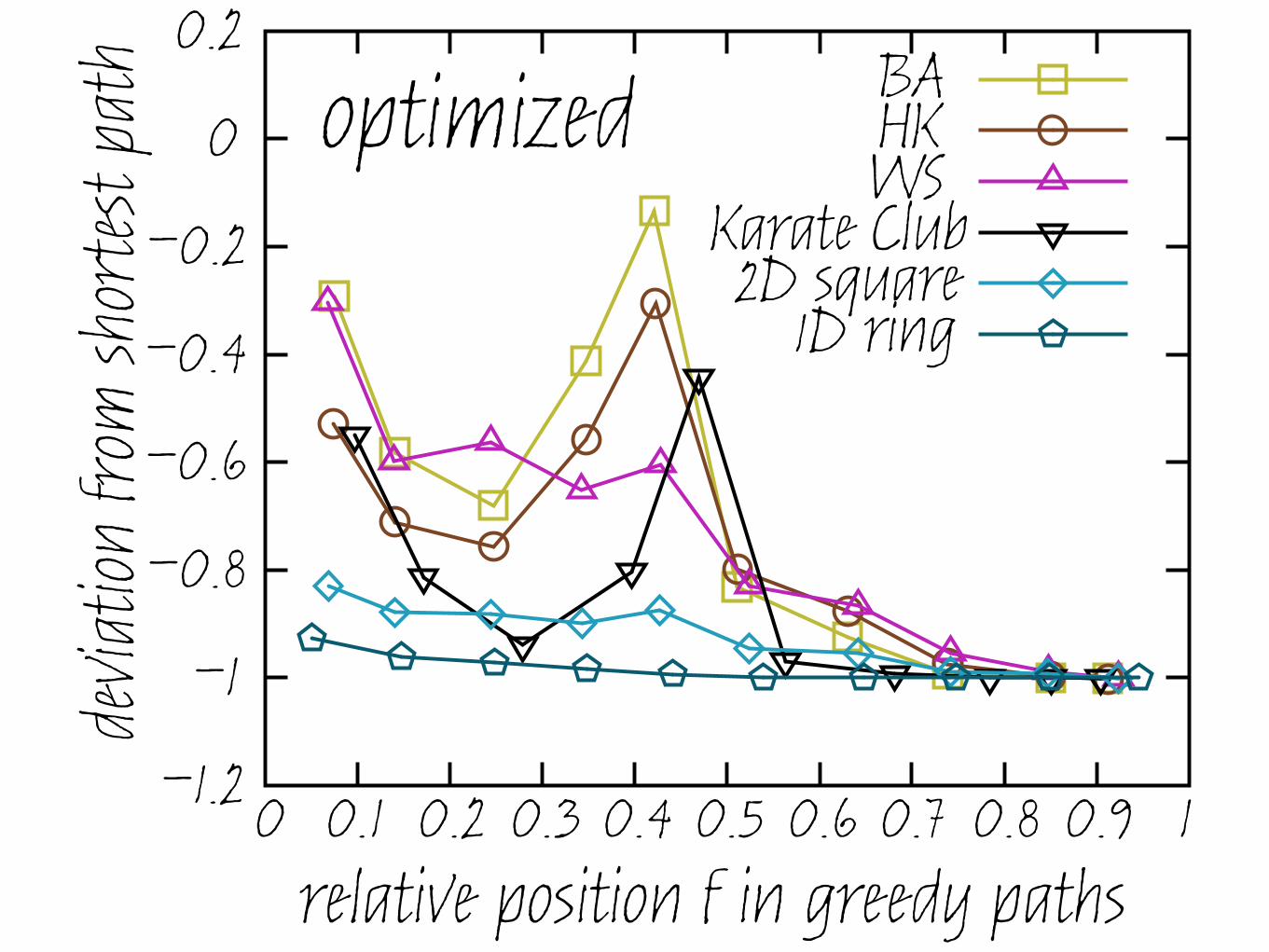
–1.2
–1
–0.8
–0.6
–0.4
–0.2
0
0.2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
BAHKWS
Karate Club2D square
1D ring
relative position f in greedy paths
devia
tion
from
shor
test p
ath
optimized

–1.2–1
–0.8–0.6–0.4–0.2
00.2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
devia
tion
from
shor
test p
ath
relative position f in GSN paths
BAHKWS
Karate Club2D square
1D ring
KK

Thank you!SH Lee & P Holme, 2012. Exploring maps with greedy navigators. Phys. Rev. Lett. 108:128701.
SH Lee & P Holme, 2012. A greedy-navigator approach to navigable city plans. To appear in Eur. J. Phys. Spec. Top.
SH Lee & P Holme, 2012. Geometric properties of graph layouts optimized for greedy navigation. Under review Phys. Rev. E.