f1 4 430201 engineering statics o xeng.sut.ac.th/ce/oldce/courseonline/430201(01)/statics_53... ·...
TRANSCRIPT
430201 Engineering Statics430201 Engineering Statics((สถิตยศาสตรสถิตยศาสตรวิศวกรรมวิศวกรรม))
รศรศ..ดรดร.. สิทธิชัยสิทธิชัย แสงอาทิตยแสงอาทิตยสาขาวิชาวิศวกรรมโยธาสาขาวิชาวิศวกรรมโยธาสํานักวิชาวิศวกรรมศาสตรสํานักวิชาวิศวกรรมศาสตร
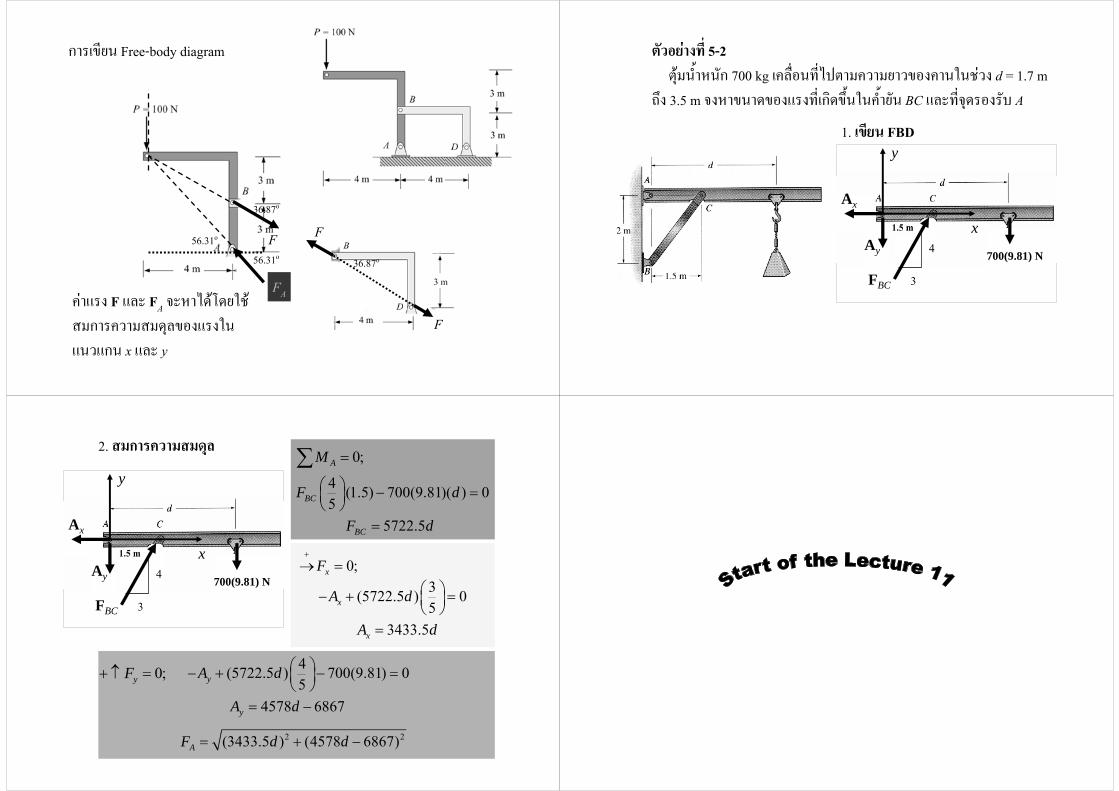
สรุปบทที่ 5/25.3 สมการความสมดุลในสองมติิ
เมื่อวัตถุอยูในสภาวะสมดุลแลว
x
y
F1
F2
F3
F4
O
ขั้นตอนในการแกปญหาสมดุลในสองมิติ1. เขียน Free-body diagram (FBD)2. ประยุกตใชสมการความสมดุล (equations of equilibrium)
(โดยปกติใชสมการของโมเมนตกอนใชสมการของแรง)ใชเพื่อแกหาแรง/โมเมนตที่ไมทราบคาได 3 ตัว
pinpin
pinlink
Link เปนชิ้นสวนที่รับเฉพาะแรงดึงและแรงกดอัดเทานั้น
1. แยกของอเหล็กออกจากจุดรองรับ
2. ตั้งแกน x - y
3. เขียนขนาด ตําแหนงและทิศทางของแรงและ moment ที่ทราบคาและที่ไมทราบคา
500 N-mT
Ax
Ay
4. ใสระยะและมุมตางๆ ที่จําเปนสําหรับสมการความสมดุล
2 m
1 m30o
การเขียน Free-body diagram
500 N-mT
Ax
Ay
2 m
1 m30o
;0 ∑ =+ AM )2(30sin oT+ 0500 =−
N 95.267=T
∑ =→+
;0xF 030cos95.267 =+− oxA
∑ =↑+
;0yF kN 134=yA
)1(30cos oT+
N 232=xA
030sin95.267 =+− oyA
การประยุกตใชสมการความสมดุล
= 268 N= 232 N
= 134 N

pin
pinpinกระบอก hydraulic
x
y
2.24 kN
FBC
Ax
Ay1 m1 m
2 m 30o 0.5 m30o
0.0625 m
การเขียน Free-body diagram
;0 ∑ =+ AM )5.0(BCF− 0)30cos2(24.2 =+ o
kN 76.7=BCF
∑ =→+
;0xF kN 76.7=xA
∑ =↑+
;0yF kN 24.2=yAkN 08.8=RA
2.24 kN
การประยุกตใชสมการความสมดุล
7.76 kN
7.76 kN2.24 kN
5.4 Two- และ Three-Force MembersTwo- force member - ชิ้นสวนของโครงสรางที่ถูกกระทําโดยแรง
สองแรงในแนวเดียวกัน และไมมี couple moment กระทํา โดยจะเปนแรงดึงหรือแรงกดอัด
Three-force member - ชิ้นสวนของโครงสรางถูกกระทําโดยแรงสามแรงO
W FCB
FA
โดยจะอยูในสมดุลเมื่อแรงทั้งสามตัดกันที่จุดใดจุดหนึ่งหรือแรงทั้งสามขนานกัน
จากรูป เมื่อกําหนดคา W แลว คาแรง FCB และ FA จะหาไดโดยใชสมการความสมดุลของแรงในแนวแกน x และ y
F
F36.87o
F36.87o
FA
56.31o
การเขียน Free-body diagram
56.31o
คาแรง F และ FA จะหาไดโดยใชสมการความสมดุลของแรงในแนวแกน x และ y
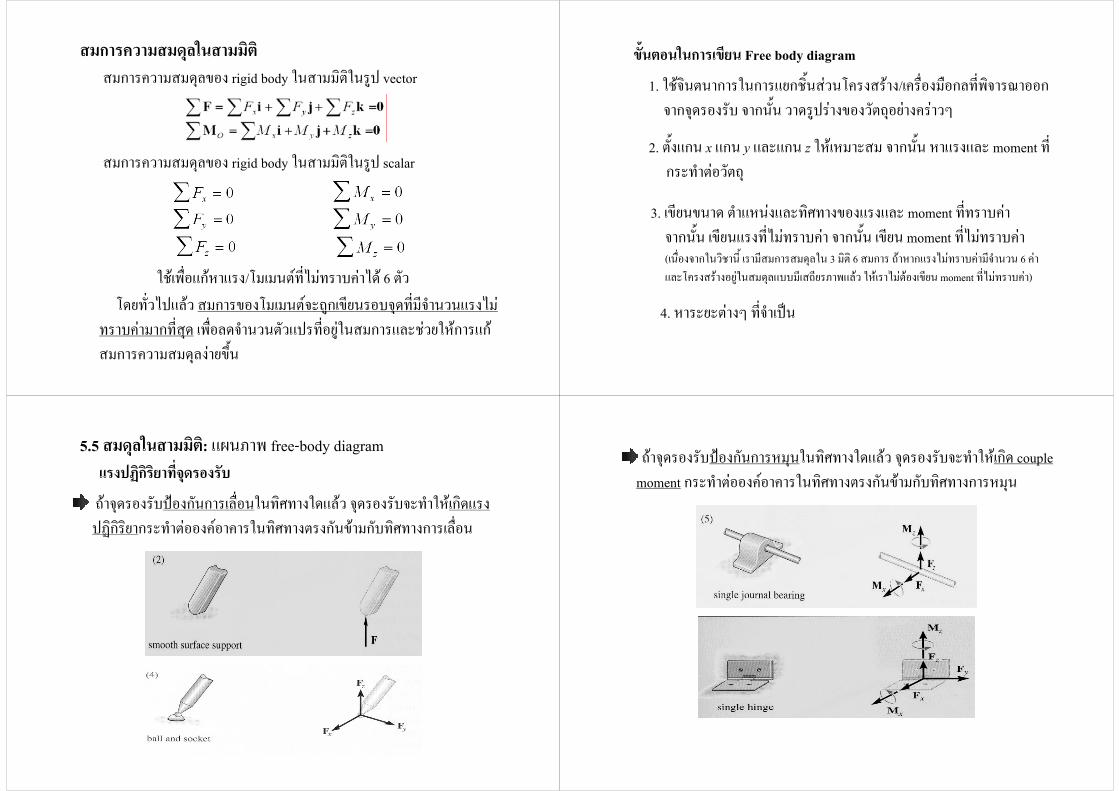
ตัวอยางที่ 5-2ตุมน้ําหนัก 700 kg เคลือ่นที่ไปตามความยาวของคานในชวง d = 1.7 m
ถึง 3.5 m จงหาขนาดของแรงที่เกิดขึ้นในค้ํายัน BC และที่จุดรองรับ A1. เขียน FBD
x
y
700(9.81) NAy
Ax
FBC
4
3
2. สมการความสมดลุ
x
y
700(9.81) NAy
Ax
FBC
4
3
0;AM =∑4 (1.5) 700(9.81)( ) 05
5722.5
BC
BC
F d
F d
⎛ ⎞ − =⎜ ⎟⎝ ⎠
=
0;xF+
→ =3(5722.5 ) 05
3433.5
x
x
A d
A d
⎛ ⎞− + =⎜ ⎟⎝ ⎠
=
0;yF+ ↑ =4(5722.5 ) 700(9.81) 05
4578 6867
y
y
A d
A d
⎛ ⎞− + − =⎜ ⎟⎝ ⎠
= −
2 2(3433.5 ) (4578 6867)AF d d= + −
สมการความสมดลุในสามมติิสมการความสมดุลของ rigid body ในสามมิติในรูป vector
สมการความสมดุลของ rigid body ในสามมิติในรูป scalar
โดยทั่วไปแลว สมการของโมเมนตจะถูกเขียนรอบจุดทีม่ีจํานวนแรงไมทราบคามากที่สุด เพื่อลดจํานวนตัวแปรที่อยูในสมการและชวยใหการแกสมการความสมดุลงายขึ้น
ใชเพื่อแกหาแรง/โมเมนตที่ไมทราบคาได 6 ตัว
3. เขียนขนาด ตําแหนงและทิศทางของแรงและ moment ที่ทราบคา จากนั้น เขียนแรงที่ไมทราบคา จากนั้น เขียน moment ที่ไมทราบคา (เนื่องจากในวิชานี้ เรามีสมการสมดุลใน 3 มิติ 6 สมการ ถาหากแรงไมทราบคามีจํานวน 6 คาและโครงสรางอยูในสมดุลแบบมีเสถยีรภาพแลว ใหเราไมตองเขยีน moment ทีไ่มทราบคา)
ขั้นตอนในการเขียน Free body diagram
2. ตั้งแกน x แกน y และแกน z ใหเหมาะสม จากนั้น หาแรงและ moment ที่กระทําตอวัตถุ
4. หาระยะตางๆ ที่จําเปน
1. ใชจินตนาการในการแยกชิ้นสวนโครงสราง/เครื่องมือกลที่พิจารณาออกจากจุดรองรับ จากนั้น วาดรูปรางของวัตถุอยางคราวๆ
5.5 สมดลุในสามมติ:ิ แผนภาพ free-body diagramแรงปฏิกิริยาที่จุดรองรับ
ถาจุดรองรับปองกันการเลื่อนในทิศทางใดแลว จุดรองรับจะทําใหเกิดแรงปฏิกิริยากระทําตอองคอาคารในทิศทางตรงกันขามกับทิศทางการเลื่อน
ถาจุดรองรับปองกันการหมุนในทิศทางใดแลว จุดรองรับจะทําใหเกิด couple moment กระทําตอองคอาคารในทิศทางตรงกันขามกับทิศทางการหมุน
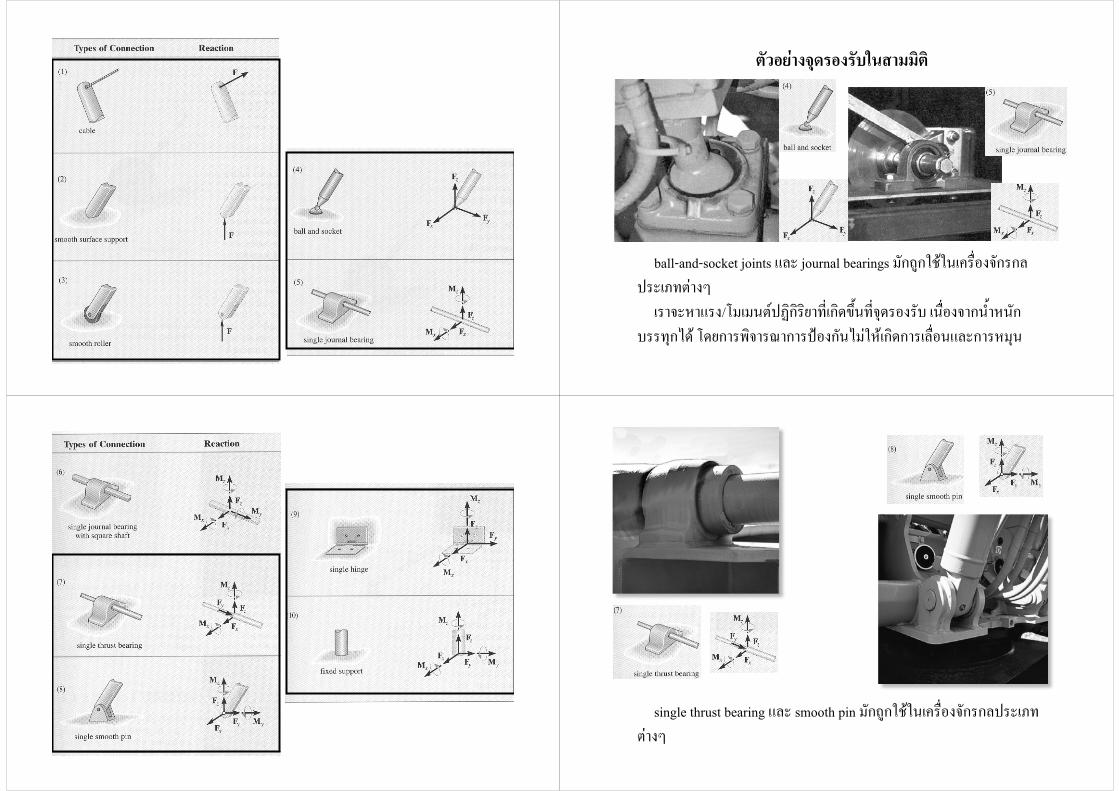
ตัวอยางจุดรองรับในสามมิติตัวอยางจุดรองรับในสามมิติ
ball-and-socket joints และ journal bearings มักถูกใชในเครื่องจักรกลประเภทตางๆ
เราจะหาแรง/โมเมนตปฏิกิริยาที่เกดิขึ้นที่จุดรองรับ เนื่องจากน้ําหนักบรรทุกได โดยการพิจารณาการปองกันไมใหเกิดการเลื่อนและการหมุน
single thrust bearing และ smooth pin มักถกูใชในเครื่องจักรกลประเภทตางๆ

IMPORTANT NOTE
single bearing หรือ hinge เพียงตัวเดียวสามารถปองกันการหมุนของโครงสรางไดโดยการใช moment Mx และ Mz
แตในการใชงานจริงในโครงสราง เรามักจะใช bearing หรือ hinge รวมกัน ≥ 2 ตัวและจัดเรียงอยางเหมาะสม ในการปองกันการหมุนของโครงสราง ดังนั้น ในกรณีเชนนี้ bearing หรือ hinge จะมีเพียงแรงปฏิกิริยาเทานั้น (โดยไมมี moment ปฏิกิริยาเกิดรวมดวย)
เราจะไมยึดประตูโดยใชบานพับตัวเดียวเนื่องจากจะทําใหบานพับตองรับแรงปฏิกิริยา Cy = W และโมเมนตดัด M = Wd ซึ่งทําใหประตูขาดเสถียรภาพ (ลม) ในการใชงานไดงาย
ในทางปฏิบัติ ประตูจึงถูกยึดโดยใชบานพับอยางนอย 2 ตัว ซึ่ง Ay+By = W และโมเมนตแรงคูควบ Fxd' = Wd ซึ่งทําใหประตูมีเสถียรภาพในการใชงาน และบานพับไมตองตานทานตอโมเมนตดัด
Note: แรง FEC จะถูกหาไดโดยตรงโดยใชโมเมนตรอบแกน z เพราะอะไร?
x
y
z
0.2 kN
Ax
Ay
Az
Bx
By
FEC
Note: FBD ของโครงสรางใน 3 มิติจะมี unknowns 5 หรือ 6 ตัว ขึ้นอยูกับแรงกระทําและการยึดรั้งโครงสราง
สรุป: ในการเขียน FBD ของวัตถุใน 3 มิติ ใหทําการเขียนแรงปฏิกิริยาที่จุดรองรับทุกจุดกอน จากนั้น จึงพิจารณาวามีโมเมนตปฏิกิริยาหรือไม?
จุดรองรับ A B และ C เปน journal bearing Note: แรงที่ตัดแกนและแรงที่ขนานแกนจะไมทําใหเกิดโมเมนตรอบแกนดังกลาว
Note: ในกรณีนี้ แรง Bz และแรง Cy จะตานทานตอโมเมนตรอบแกน x
journal bearing
journal bearing
journal bearing
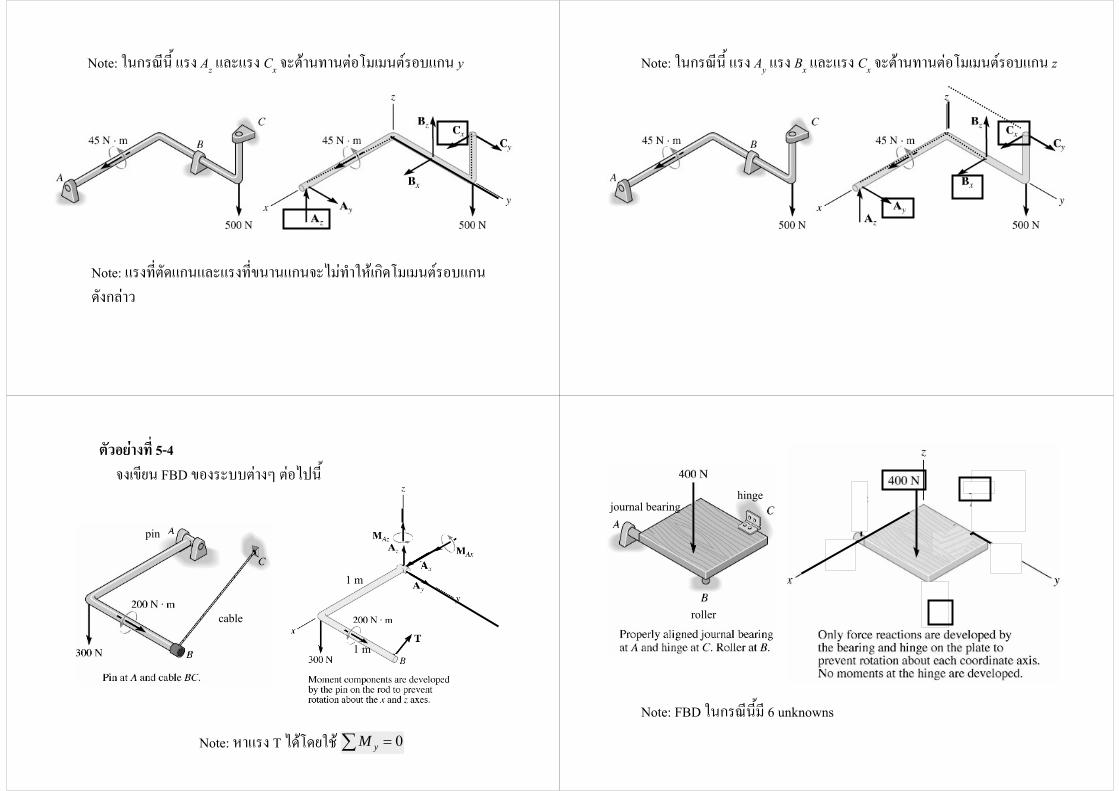
Note: แรงที่ตัดแกนและแรงที่ขนานแกนจะไมทําใหเกิดโมเมนตรอบแกนดังกลาว
Note: ในกรณีนี้ แรง Az และแรง Cx จะตานทานตอโมเมนตรอบแกน y Note: ในกรณีนี้ แรง Ay แรง Bx และแรง Cx จะตานทานตอโมเมนตรอบแกน z
ตัวอยางที่ 5-4จงเขียน FBD ของระบบตางๆ ตอไปนี้
Note: หาแรง T ไดโดยใช
1 m
1 m
cable
pin
∑ = 0yM
journal bearing
roller
hinge
Note: FBD ในกรณีนี้มี 6 unknowns

trust bearingcable
5.6 สมการความสมดุลในสามมติิสมการความสมดุลของ rigid body ในสามมิติในรูป vector
สมการความสมดุลของ rigid body ในสามมิติในรูป scalar
โดยทั่วไปแลว สมการของโมเมนตจะถูกเขียนรอบจุดทีม่ีจํานวนแรงไมทราบคามากที่สุด เพื่อลดจํานวนตัวแปรที่อยูในสมการและทําใหการแกสมการความสมดุลงายขึ้น
5.7 การยึดรั้งของวัตถุแกรง ถาวัตถุมีแรงและโมเมนตที่ไมทราบคาเทากับจํานวนสมการความ สมดุลแลววัตถุดังกลาวจะอยูในสภาวะ statically determinate ถาวัตถุมีแรงและโมเมนตที่ไมทราบคามากกวาจํานวนสมการความสมดุลแลว วัตถุดังกลาวจะอยูในสภาวะ statically indeterminate
จุดรองรับแบบยึดแนนตองมี reaction เปนแรง 3 แรงและโมเมนต 3 โมเมนตเสมอ
การยึดวัตถุที่ไมเหมาะสม การยึดวัตถุอยางเพียงบางสวน
cable
cable
cable
ball and socket
ball and socket
1 m
1 m
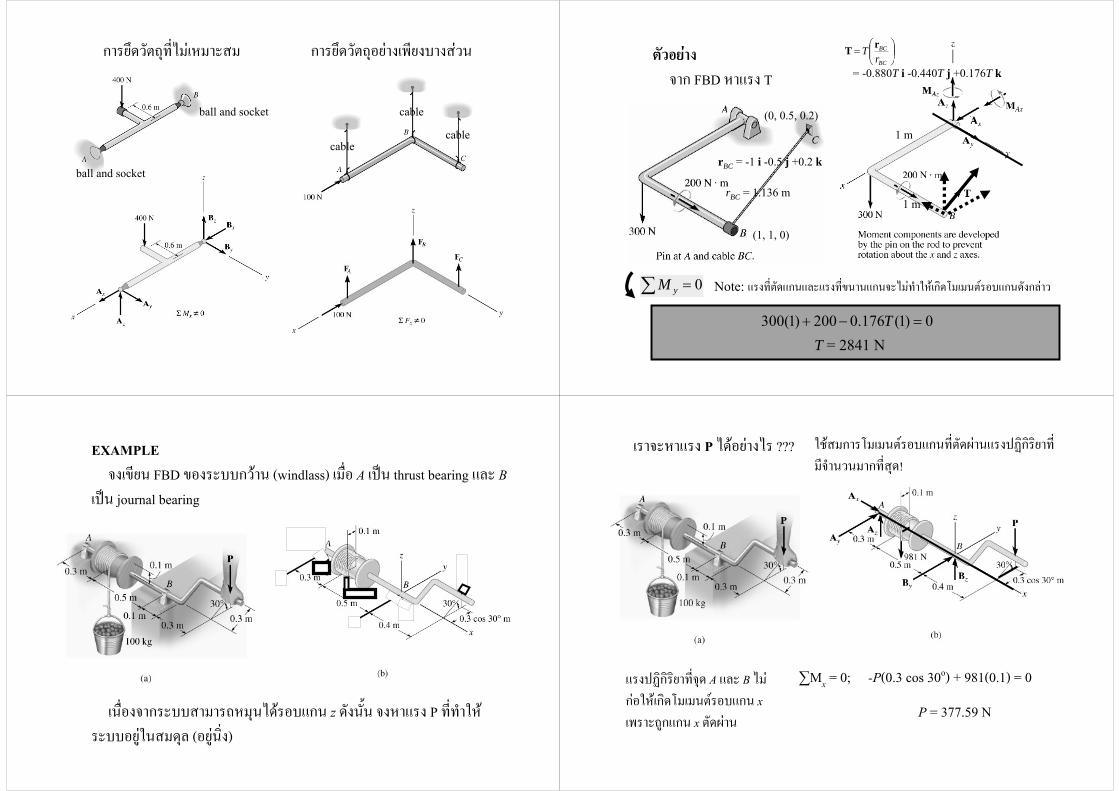
ตัวอยางจาก FBD หาแรง T
∑ = 0yM Note: แรงที่ตัดแกนและแรงทีข่นานแกนจะไมทําใหเกิดโมเมนตรอบแกนดังกลาว
⎟⎟⎠
⎞⎜⎜⎝
⎛=
BC
BC
rT rT
(0, 0.5, 0.2)
(1, 1, 0)
rBC = -1 i -0.5 j +0.2 k
rBC = 1.136 m
= -0.880T i -0.440T j +0.176T k
0)1(176.0200)1(300 =−+ TT = 2841 N
EXAMPLEจงเขียน FBD ของระบบกวาน (windlass) เมื่อ A เปน thrust bearing และ B
เปน journal bearing
เนื่องจากระบบสามารถหมุนไดรอบแกน z ดังนั้น จงหาแรง P ที่ทําใหระบบอยูในสมดุล (อยูนิ่ง)
เราจะหาแรง P ไดอยางไร ???
∑Mx = 0;P = 377.59 N
-P(0.3 cos 30o) + 981(0.1) = 0แรงปฏิกิริยาที่จุด A และ B ไมกอใหเกิดโมเมนตรอบแกน x เพราะถูกแกน x ตัดผาน
ใชสมการโมเมนตรอบแกนที่ตัดผานแรงปฏิกิริยาที่มีจํานวนมากที่สุด!

เราจะหาแรง Az ไดอยางไร ???
∑My = 0;Az = 422.33 N
แรงปฏิกิริยาที่จุด B ไมกอใหเกิดโมเมนตรอบแกน y เพราะถูกแกนตัดผาน
Az (0.3+0.5) – 981(0.5) + 377.59(0.4) = 0
แรงปฏิกิริยา Ax และ Ay ไมกอใหเกิดโมเมนตรอบแกน y เพราะพุงชนและขนานกับแกน
เราจะหาแรง Bz ไดอยางไร ???
หรืออาจหา Bz ไดโดยใชสมการ ∑Fz = 0Az + Bz = P + 981
∑My' = 0; -Bz (0.3+0.5) + 981(0.3) + P(0.3+0.5+0.4) = 0
Bz = 934.26 N
EXAMPLEจงเขียน FBD ของระบบ
rollerBall-and-socket
Note: เนื่องจากระบบไมถูกกระทําโดยแรงและโมเมนตที่กอใหเกิดการหมุนรอบแกน z ดังนั้นระบบจึงสมดุลรอบแกน z โดยอัตโนมัติ (มี 5 unknowns)
cable
เราจะหาแรง TC ไดอยางไร ???
∑My' = 0; TC (1.5+1.5) -200 -981(1.5) - 300(1.5) = 0
TC = 707.2 N
cable
ใชสมการโมเมนตรอบแกนที่ตัดผานแรงปฏิกิริยาที่มีจํานวนมากที่สุด!
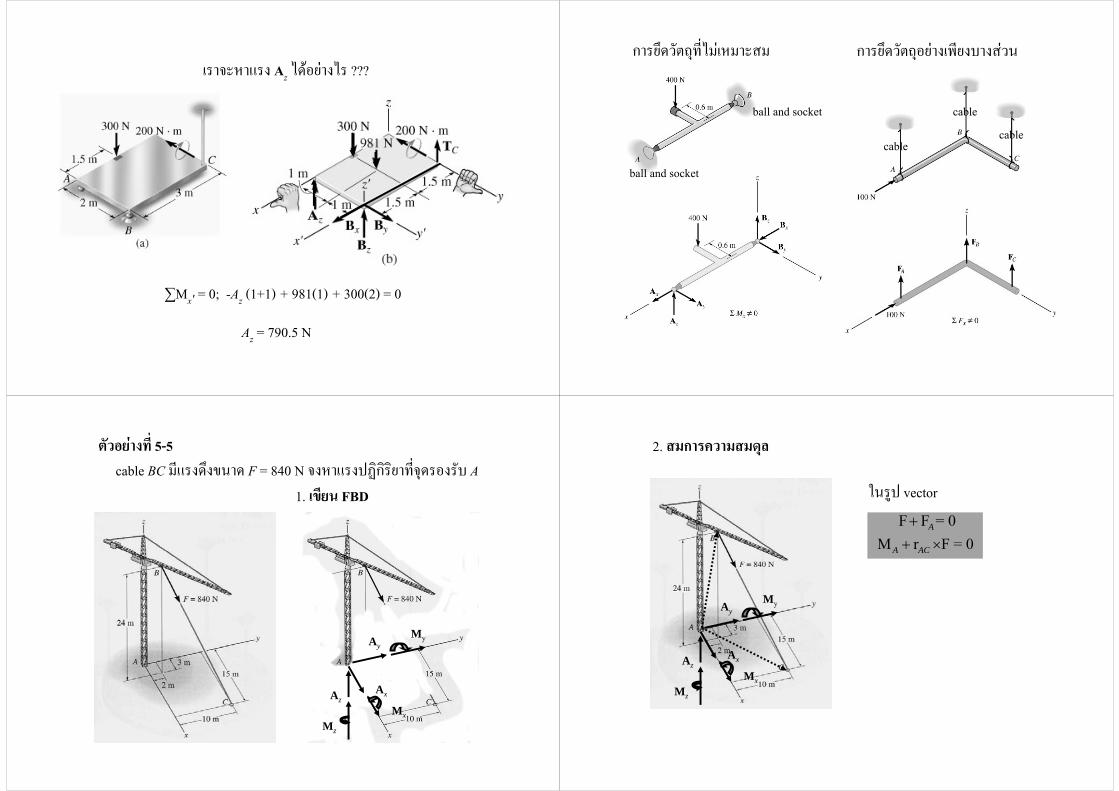
เราจะหาแรง Az ไดอยางไร ???
∑Mx' = 0; -Az (1+1) + 981(1) + 300(2) = 0
Az = 790.5 N
การยึดวัตถุที่ไมเหมาะสม การยึดวัตถุอยางเพียงบางสวน
cable
cable
cable
ball and socket
ball and socket
ตัวอยางที่ 5-5cable BC มีแรงดึงขนาด F = 840 N จงหาแรงปฏิกิริยาที่จุดรองรับ A
1. เขียน FBD
Ax
Ay
AzMx
My
Mz
Ax
Ay
AzMx
My
Mz
F F = 0A+M r F = 0A AC+ ×
2. สมการความสมดลุ
ในรูป vector

F F = 0A+M r F = 0A AC+ ×
vector ของแรง F(3, 2, 24)
(15, 10, 0)
rBC = (15-3)i+(10-2)j+(0-24)k= 12i + 8j - 24k
position vector ของ cable
rF= BC
BC
Fr
⎛ ⎞⎜ ⎟⎝ ⎠
2 2 2
12i 8j 24kF 840 360i 240j 720k N(12) (8) ( 24)
⎡ ⎤+ −= = + −⎢ ⎥+ + −⎢ ⎥⎣ ⎦
F 360i 240j 720k N= + −
F F = 0A+
[360i 240j 720k]+[ i j k] 0x y zA A A+ − + + =
360 N240 N
720 N
x
y
z
AAA
= −
= −
=
Ax
Ay
Az
F 360i 240j 720k N= + −
360 N
240 N
720 N
F 360i 240j 720k N= + −
Ax
Ay
Az
F 360i 240j 720k N= + −
M r F = 0A AC+ ×
F 360i 240j 720k N= + −
rAC
(0, 0, 0)
(15, 10, 0)
rAC = (15-0)i+(10-0)j+(0-0)k= 15i + 10j
position vector
i j kM 15 10 0 =0
360 240 720A +
−
M 7200i 10800j=0A − +
7.20 kN-m10.8 kN-m
0
Ax
Ay
Az
MMM
=
= −
=
MAy
MAz
MAx
