figure 3.1. schematic showing all major components of an spm. in this example, feedback is used to...
TRANSCRIPT
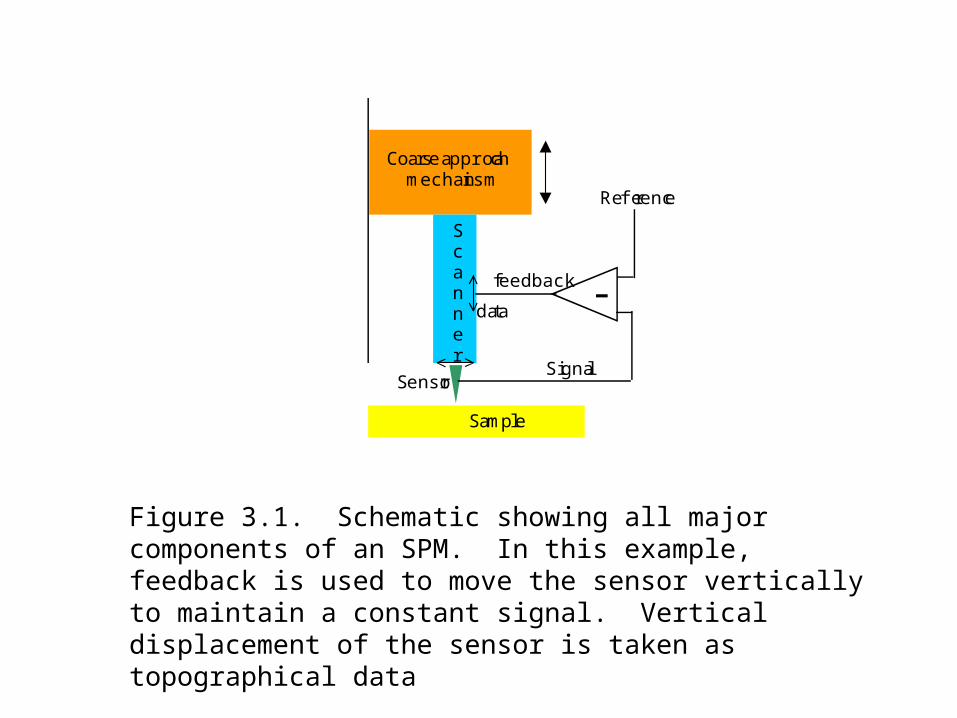
Figure 3.1. Schematic showing all major components of an SPM. In this example, feedback is used to move the sensor vertically to maintain a constant signal. Vertical displacement of the sensor is taken as topographical data
Coarse approachmechanism
Scanner
Sensor
Sample
Reference
-
Signal
feedback
data
Figure 3.1. Schematic showing all majorcomponents of an SPM. In this example,feedback is used to move the sensorvertically to maintain a constant signal.Vertical displacement of the sensor is takenas topographical data.
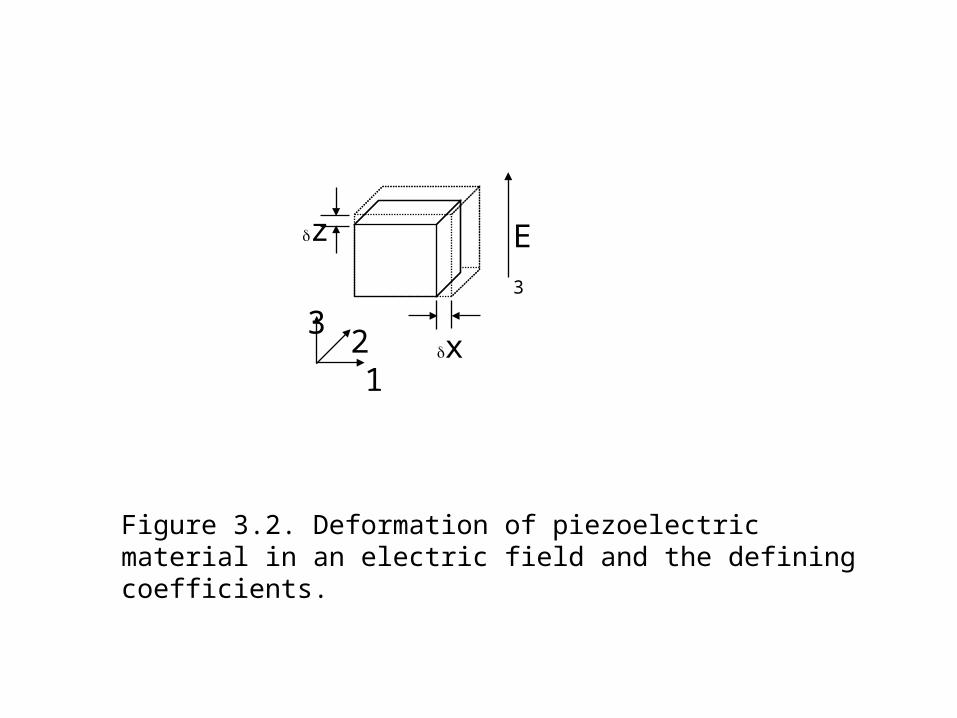
Figure 3.2. Deformation of piezoelectric material in an electric field and the defining coefficients.
12
3
E3
x
z
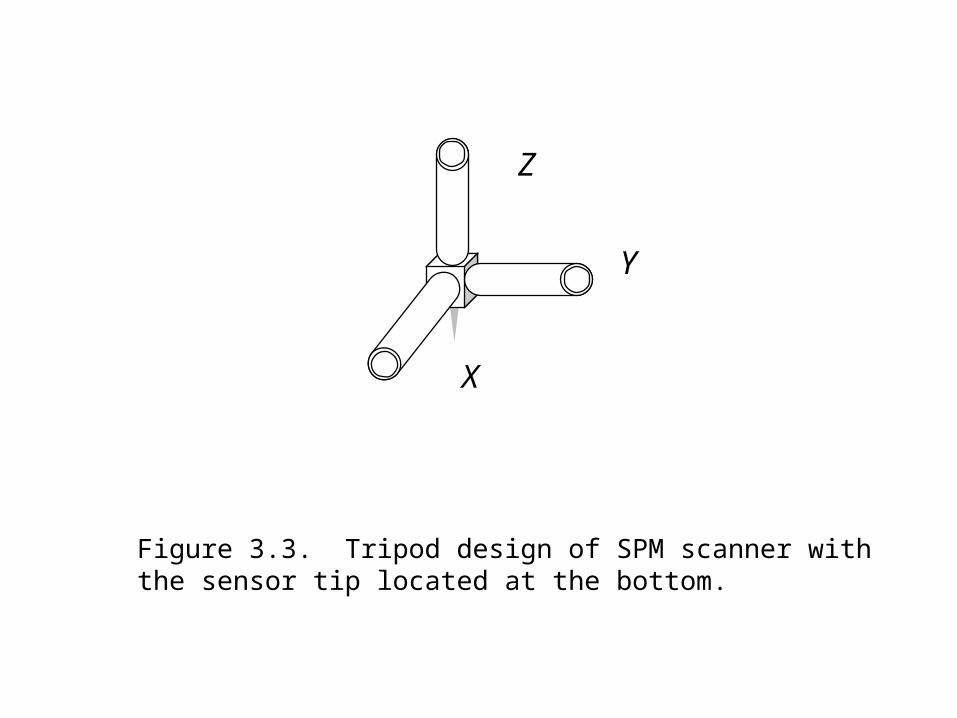
Figure 3.3. Tripod design of SPM scanner with the sensor tip located at the bottom.
X
Z
Y
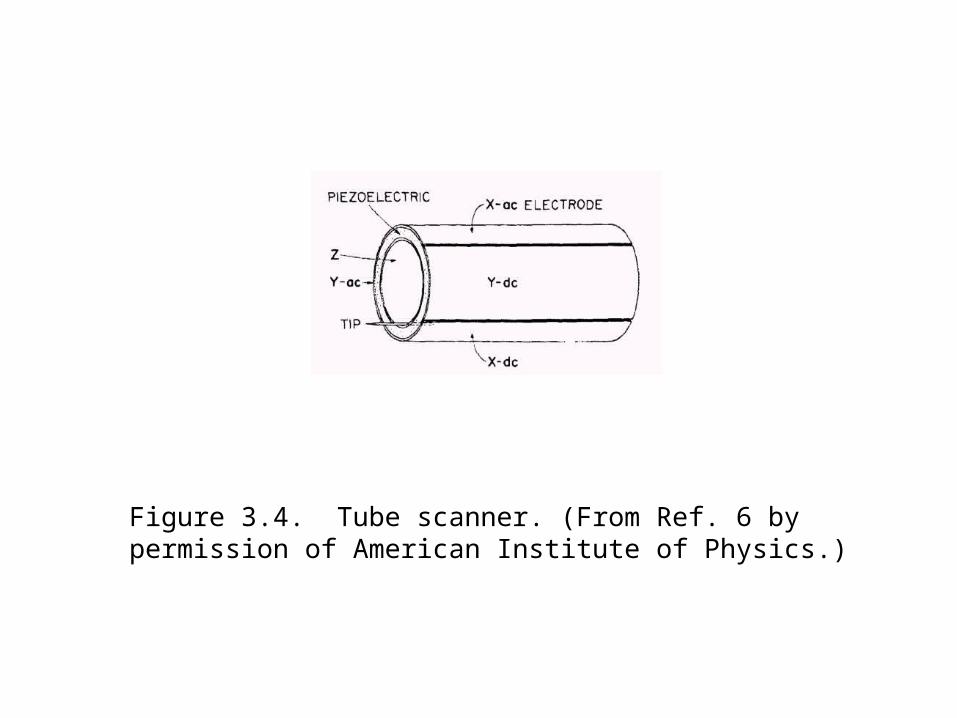
Figure 3.4. Tube scanner. (From Ref. 6 by permission of American Institute of Physics.)
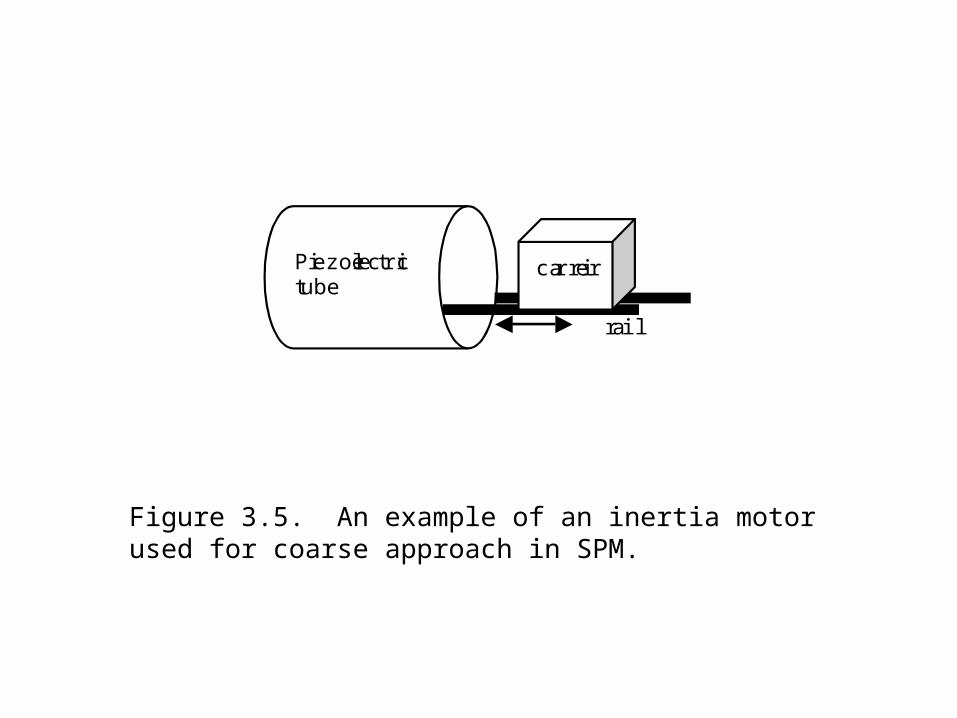
Figure 3.5. An example of an inertia motor used for coarse approach in SPM.
Piezoelectrictube
carrier
rail
Figure 3.5. An example of an inertiamotor used for coarse approach in SPM.
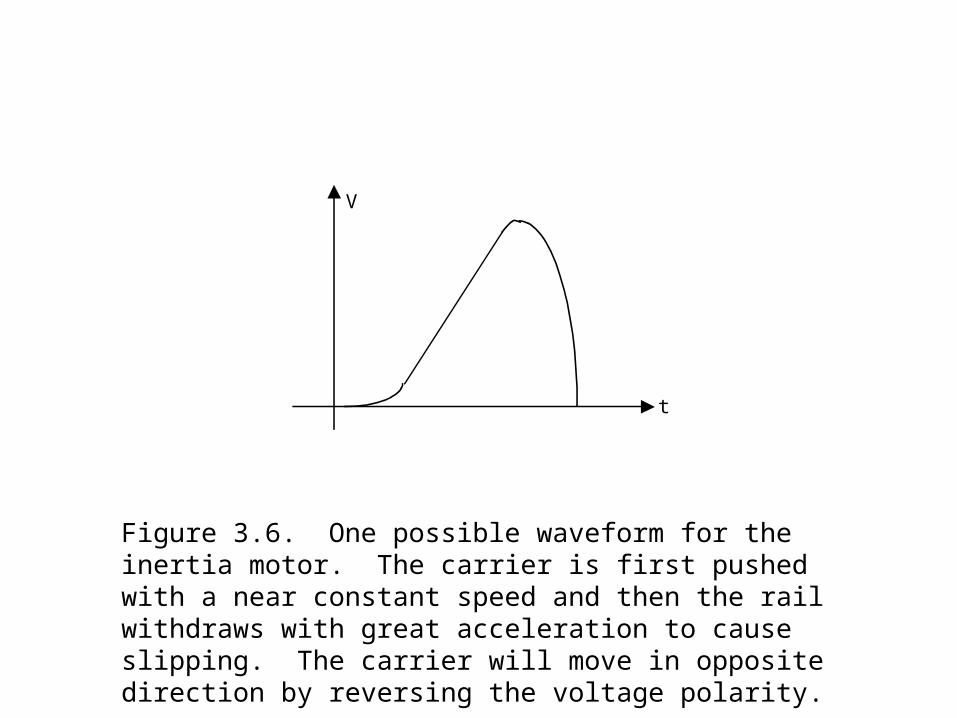
Figure 3.6. One possible waveform for the inertia motor. The carrier is first pushed with a near constant speed and then the rail withdraws with great acceleration to cause slipping. The carrier will move in opposite direction by reversing the voltage polarity.
V
t
Figure 3.6. One possible waveform for theinertia motor. The carrier is fi rst pushedwith a near constant speed and then the railwithdraws with great acceleration to causeslipping. The carrier will move in oppositedirection by reversing the voltage polarity.
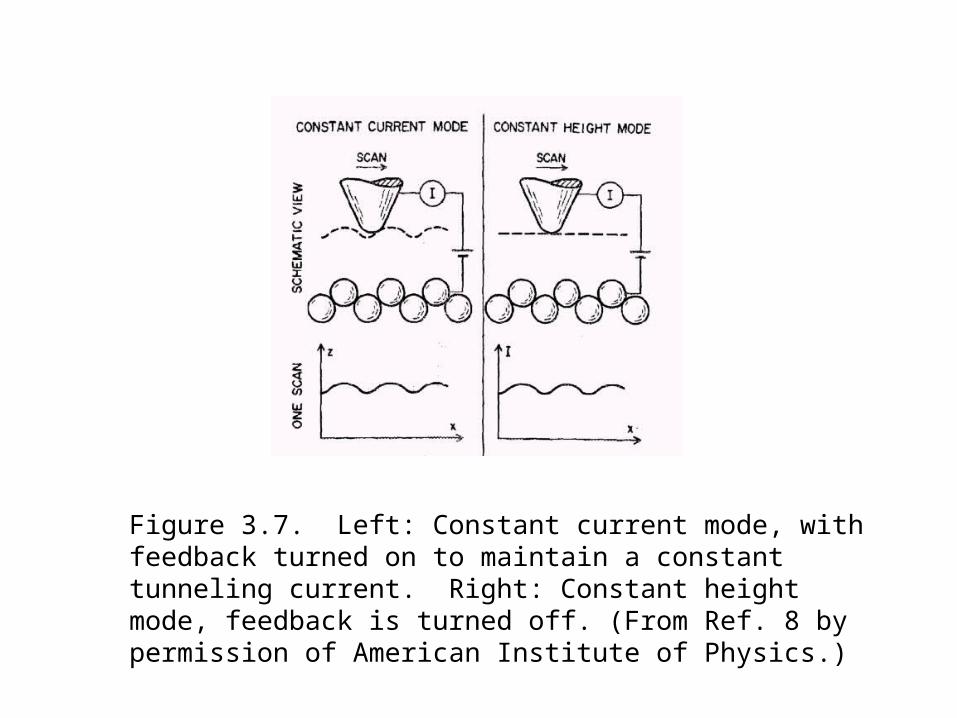
Figure 3.7. Left: Constant current mode, with feedback turned on to maintain a constant tunneling current. Right: Constant height mode, feedback is turned off. (From Ref. 8 by permission of American Institute of Physics.)

Figure 3.8. Schematic for the feedback loop used in constant current mode of STM.
As
Ac -
O
REz
-h
d
Figure 3.8. Schematic for the feedback loop used inconstant current mode of STM.

Figure 3.9. Tunneling of a single electron through a potential barrier.
0 d
x
V(x)
I II III
Aeikx
Be-ikx
Eeikx
Cekx +De-kx
Figure 3.9. Tunneling of a single electronthrough a potential barrier.
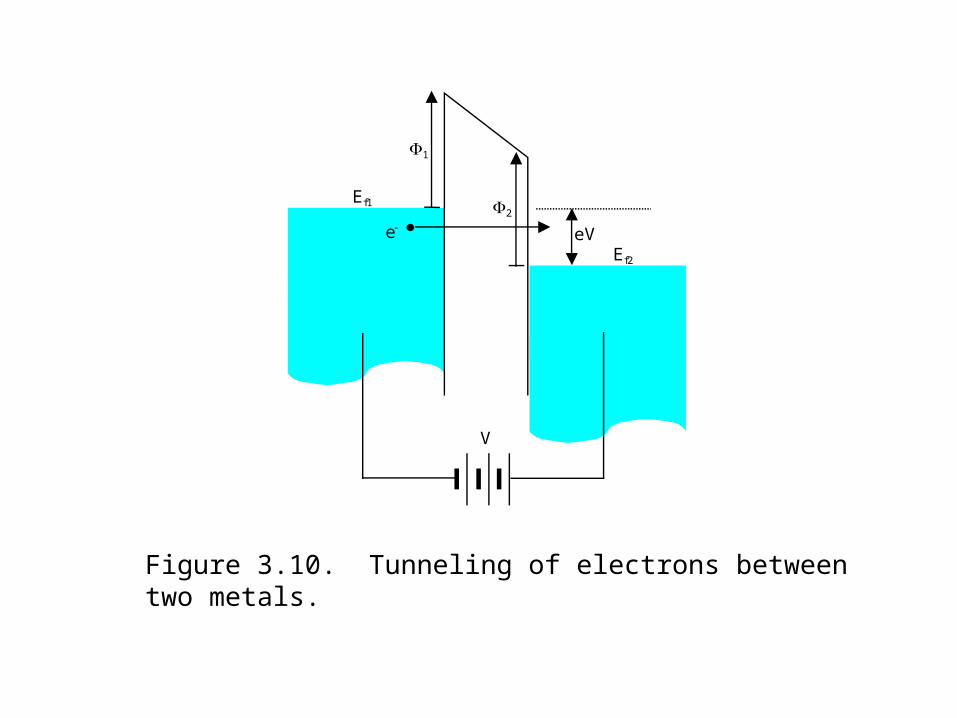
Figure 3.10. Tunneling of electrons between two metals.
V
eV
Ef1
Ef2
1
2
e-
Figure 3.10. Tunneling of electrons between twometals.

Figure 3.11. Fermi-Dirac distribution and its derivative.
E
1
0
f(E) dfdE
Ef
~3.5kBTf(E)
Figure 3.11. Fermi-Dirac distribution and itsderivative.
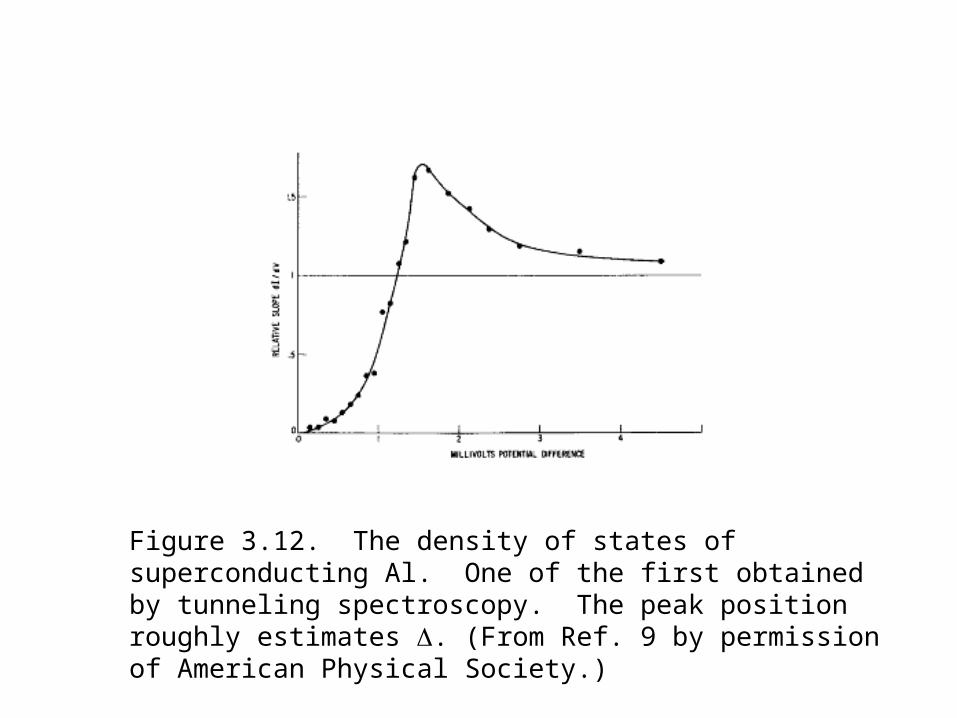
Figure 3.12. The density of states of superconducting Al. One of the first obtained by tunneling spectroscopy. The peak position roughly estimates . (From Ref. 9 by permission of American Physical Society.)

Figure 3.13. Formation of vortices in a superconductor. S region is still superconducting, but the area where the field penetrates (N) has now become normal (vortex core).
B
S S SN N N
Figure 3.13. Formation of vortices in asuperconductor. S r egion is stillsuperconducting, but the area where the fieldpenetrates (N) has now become normal (vortexcore).

Figure 3.14 . STM vortex image of NbSe2 taken at 1.8K, with an external field of 1T. (From Ref. 11 by permission of American Physical Society.)
Figure 3.14 . STM vortex image of NbSe2taken at 1.8K, with an external field of 1T.
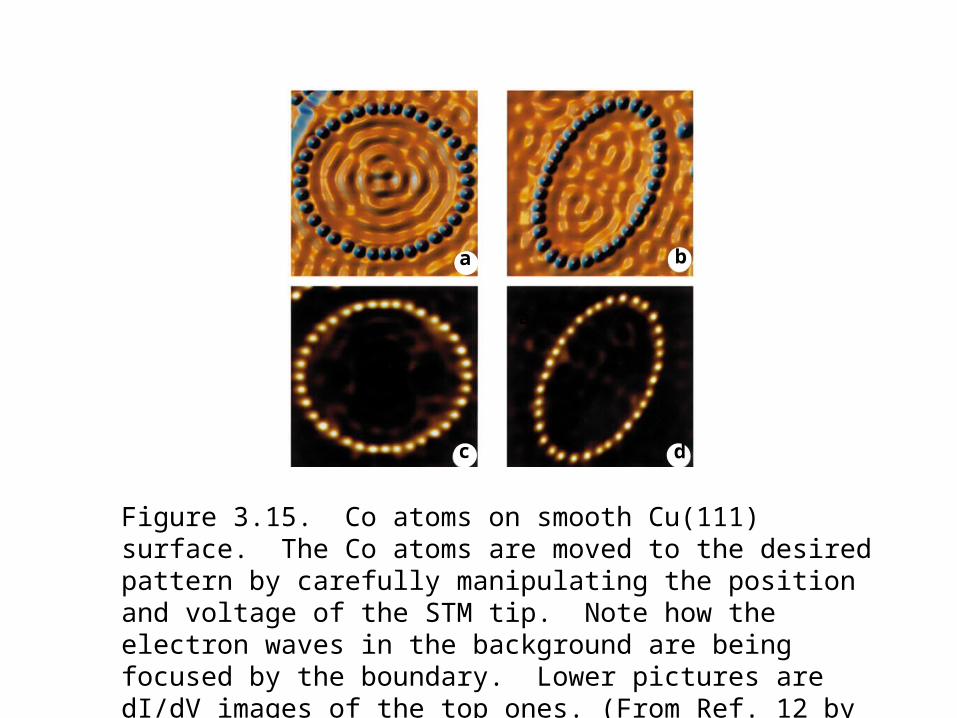
Figure 3.15. Co atoms on smooth Cu(111) surface. The Co atoms are moved to the desired pattern by carefully manipulating the position and voltage of the STM tip. Note how the electron waves in the background are being focused by the boundary. Lower pictures are dI/dV images of the top ones. (From Ref. 12 by permission of Macmillan Magazines Ltd.)
Figure 3.15. Co a toms on smooth Cu(111)surface. The Cu atoms are moved to the desiredpattern by carfully manipulating the position andvoltage of t he STM tip. Note how the electronwaves in the background are being focused bythe boundary. Lower pictures are dI/dV imagesof the top ones.
a
c d
a
b
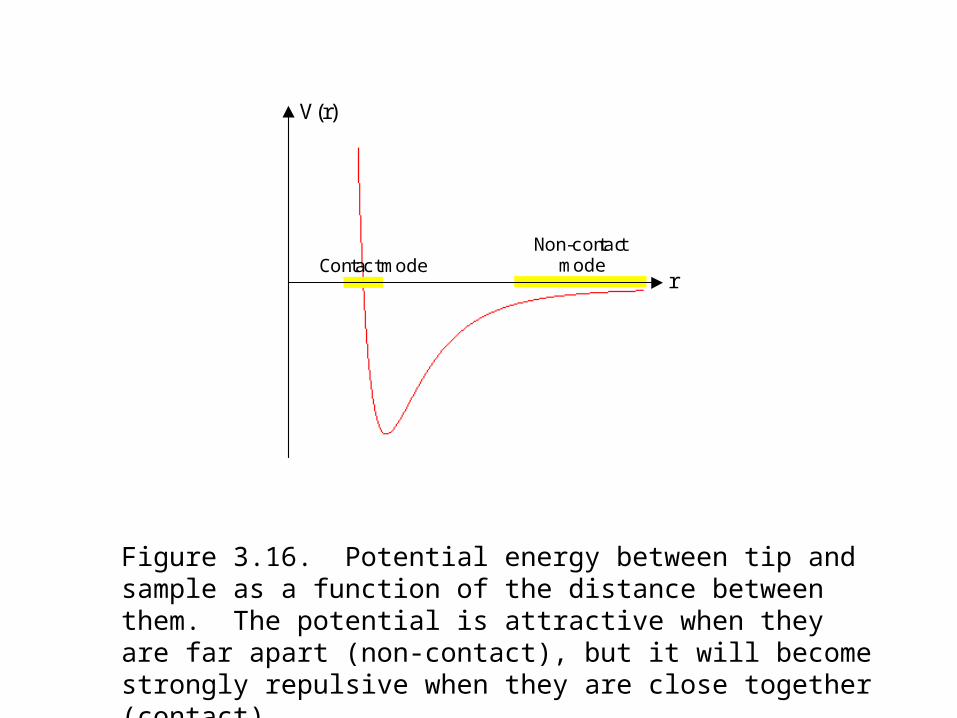
Figure 3.16. Potential energy between tip and sample as a function of the distance between them. The potential is attractive when they are far apart (non-contact), but it will become strongly repulsive when they are close together (contact).
r
V(r)
Non-contactmodeContact mode
Figure 3.16. Potential energy between tip andsample as a function of the distance between them.The potential is attractive when they are far apart(non-contact), but it will become stronglyrepulsive when they are close together (contact).

Figure 3.17. A SiO2 AFM cantilever fabricated by photolithography. (From Ref. 13 by permission of American Institute of Physics.)
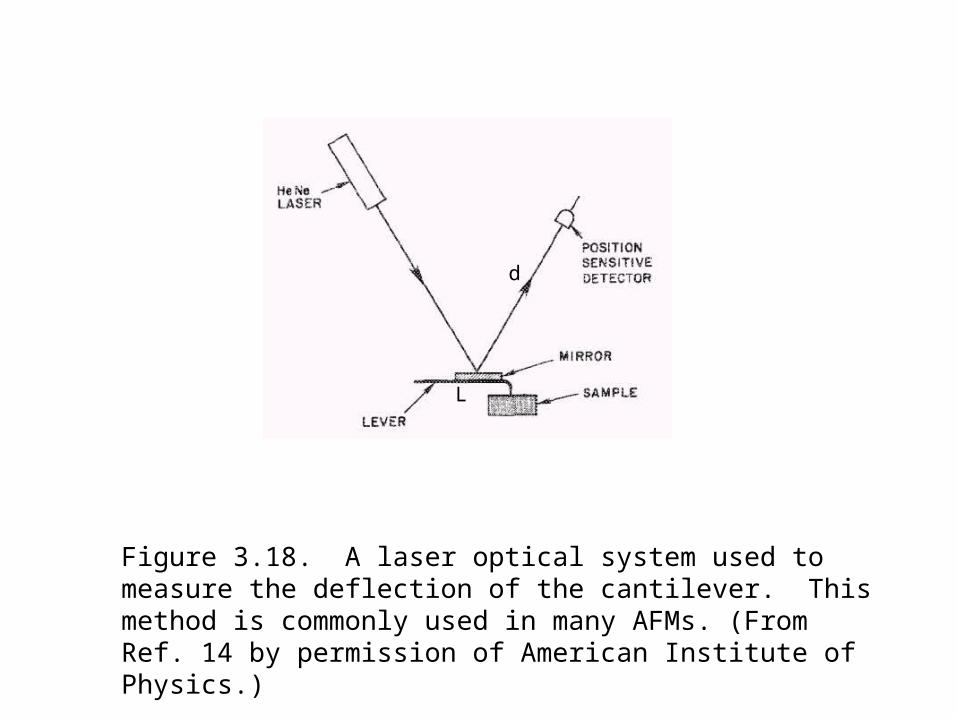
Figure 3.18. A laser optical system used to measure the deflection of the cantilever. This method is commonly used in many AFMs. (From Ref. 14 by permission of American Institute of Physics.)
Figure 3.18. A laser optical system used tomeasure the deflection of the cantilever [14].This method is commonly used in many AFMs.
d
L
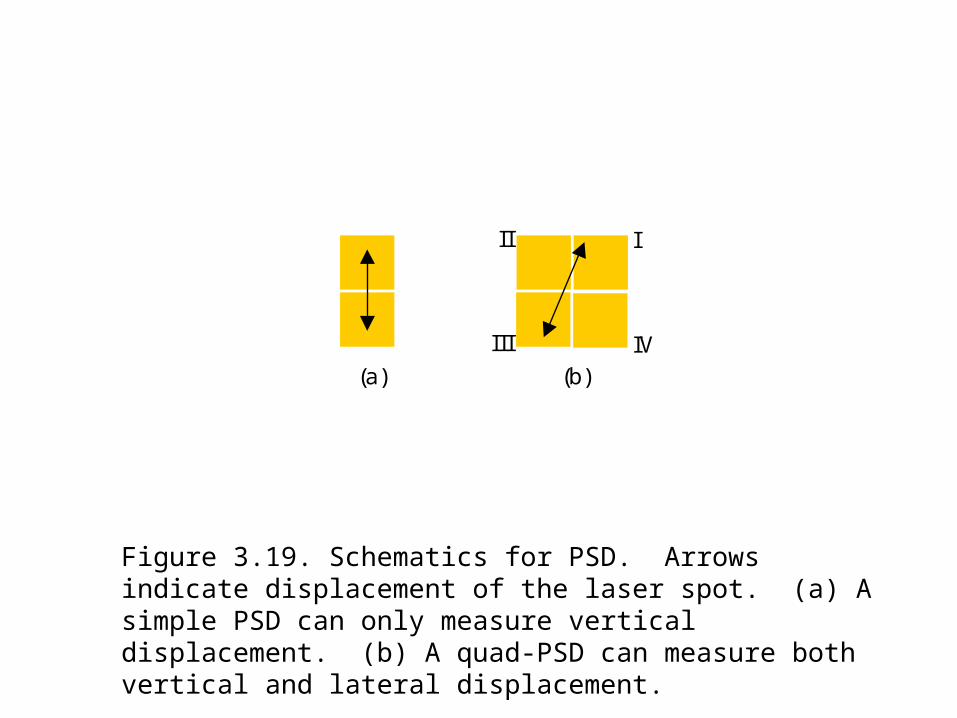
Figure 3.19. Schematics for PSD. Arrows indicate displacement of the laser spot. (a) A simple PSD can only measure vertical displacement. (b) A quad-PSD can measure both vertical and lateral displacement.
I
III IV
II
Figure 3.19. Schematics for PSD. Arrows indicatedisplacement of the laser spot. (a) A simple PSDcan on ly measure vertical displacement. (b) Aquad-PSD can measure both vertical and lateraldisplacement.
(a) (b)

Figure 3.20. A fiber optical tip used as a light source. The tip end is placed very close to the sample surface. (Reproduced with kind permission of L. Goldner and J. Hwang)