fingerprint matching based on weighting method and the svm
TRANSCRIPT

ARTICLE IN PRESS
0925-2312/$ - se
doi:10.1016/j.ne
�CorrespondE-mail addr
Neurocomputing 70 (2007) 849–858
www.elsevier.com/locate/neucom
Fingerprint matching based on weighting method and the SVM
Jia Jia�, Lianhong Cai, Pinyan Lu, Xuhui Liu
Key Laboratory of Pervasive Computing, Tsinghua University, Ministry of Education, Beijing 100084, PR China
Available online 18 October 2006
Abstract
Fingerprint verification is an important biometric technology. In this paper, an improved fingerprint matching approach that uses both
the weighting method and the support vector machine (SVM) is presented. A new weighting feature based on the distance between
minutiae is introduced to supplement the minutiae information, which is particularly useful for fingerprint images of poor quality.
Furthermore, the traditional minutiae-based matching task is studied as a classification task in the proposed approach by using SVM. To
give an objective assessment of the approach, both international and domestic fingerprint verification competition databases have been
used for the evaluation. Experimental results show substantial improvements in the accuracy and performance of fingerprint verification.
r 2006 Elsevier B.V. All rights reserved.
Keywords: Fingerprint verification; Minutiae-base; Weighting feature; SVM
1. Introduction
Fingerprint authentication is one of the most importantbiometric technologies [21]. A fingerprint is the pattern ofridges and valleys (furrows) on the surface of the finger. Inautomatic fingerprint verification system (AFVS) thecharacteristic features obtained from the test fingerprintare matched against those from a template fingerprint. Asthe fingerprint of a person is unique and immutable, theAFVS can be widely used in both anti-criminal and civilianapplications where precision is important. Therefore,accuracy and performance improvements are the keypoints in AFVS current research.
The uniqueness of a fingerprint can be determined by theglobal pattern of ridges and valleys, and by the localpattern of bifurcations and endings which are calledminutiae (Fig. 1). These two types of minutiae areconsidered by the Federal Bureau of Investigation foridentification purposes [6]. The minutiae are extracted fromthe thinned image obtained from fingerprint preprocessing[10,11,13]. Usually, the similarity between two fingerprintsis determined by computing the total number of matchingminutiae, and the corresponding process is called minutiae-
e front matter r 2006 Elsevier B.V. All rights reserved.
ucom.2006.10.028
ing author.
ess: [email protected] (J. Jia).
based matching [13]. However, general minutiae-basedmatching algorithms (GMMAs) in AFVS only make use ofminutiae localizations (positions and orientations).Our main work focuses on the minutiae-based matching
scheme. We present a fingerprint matching approach thatuses not only the minutiae localizations, but also a weightfeature, which is the distance between a minutia and itsnearest neighbor minutia. Considering that the matchingprocess can be regarded as a two-class classificationproblem (two fingerprint images are either matched ornot), using the extracted minutiae positions, orientationsand weights as features, we define a vector standing for thesimilarity of two fingerprints, and choose support vectormachine (SVM) as the classifier. The proposed approach ismotivated by the following observations:(1) The minutiae information in fingerprint images may
not be discriminative because of the different sensors andskin conditions. Most of the sensors, particularly capacitivesensors, capture only a small area of the fingertip, whichmeans some minutiae information outside the area ismissing. Furthermore, in practice a significant percentageof fingerprint images are of poor quality due to variationsin skin conditions like postnatal marks or occupationalmarks, and impression conditions. This may lead to a largenumber of errors in minutiae positions and orientations,which may cause problems in next matching stage. In such

ARTICLE IN PRESS
Fig. 1. Examples of fingerprint minutiae. (a) A ridge ending. (b) A ridge
bifurcation.
Fig. 2. A flowchart showing different phases of minutiae-based fingerprint
matching approach. The highlighted modules show the area of our work.
J. Jia et al. / Neurocomputing 70 (2007) 849–858850
cases, the weight based on two minutiae’s distance is notonly an estimate of fingerprint structure, but also asupplement for minutiae information.
(2) After getting the total number t of matchingminutiae, a judgment must be made: Do these two imagesmatch? The normal method is to compare t with a certainthreshold l. If tXl, then the two images match. If t is notgreater than or equal to the threshold, than the images donot match. That means the value of l is critical in thedecision making process. In order to reduce the influence ofl, a machine learning technique can be used to determinethe threshold for different databases. In addition, SVM is apowerful classification method that can properly labelmatching results.
In summary, we present a fingerprint matching schemethat uses both minutiae localizations and estimated weightsas features, transforming the matching problem to aclassification problem and using SVM to solve it. Theexperiments with both international and domestic finger-print verification competition data show substantialimprovements in accuracy and performance of fingerprintverification.
The rest of this paper is organized as follows: in the nextsection we introduce important background information.In Section 3 we give the analysis of GMMA. Section 4outlines the problems of GMMA and the proposedsolution. In Section 5, our approach based on weightingmethod and SVM is presented in detail. Before concludingwith discussions, experimental results and analysis aregiven in Section 6.
2. Related works
Fingerprint matching techniques may be broadly classi-fied as being either minutiae-based or image-based [2] (for agood survey see [18]). Minutiae-based approaches firstextract the minutiae from the fingerprint images; then, thematching between two fingerprints is made using the twosets of minutiae localizations. Image-based approachesusually extract the features directly from the raw imagesince a gray-level fingerprint image is available; then, thematching decision is made using these features. AFVSs areusually based on minutiae matching [9,20,23,33]. Minutiae-based fingerprint matching approach involves differentstages (see Fig. 2 for an illustration).
Our main work focuses on minutiae extraction and resultdecision stages.
Most of the fingerprint minutiae extraction methods arethinning-based by which the skeletonization processconverts each ridge contour to one pixel wide. Theminutiae points are detected by tracing the thin ridgecontours. When the trace stops, a ridge ending pointis marked. Bifurcation points are those with more thantwo neighbors [16,27,28]. In practice, thinning methodshave been found to be sensitive to noise, and the ske-leton structure does not match up with the intuitiveexpectation.Several approaches to automatic minutiae extraction
have been proposed in the literature using different types ofenhancement approaches. O’Gorman and Nickerson [22]present a technique for enhancement based on convolutionof image with a filter oriented according to the ridgedominant direction. Sherlock et al. [26] and Lee and Wang[15] define a technique for fingerprint enhancement andbinarization that performs a frequency domain filteringthrough position-dependent filters [17]. The most recentworks reported in Ref. [10] are based on the usage ofGabor filters. Lee and Wang [15] proposed a Gabor-filter-based method for fingerprint recognition. Jain et al. [10]present a fast fingerprint enhancement algorithm for use byGabor filters. Although the third method employs anisotropic constructing element and as a result keeps theoriginal shape of the fingerprint, the impulsive noise cannotbe completely eliminated. However, the time complexity ofthese three is at least O(N2d2) for an image with N�N pixelentries and a filter whose radius is d. It is time consuming.In this paper, we first propose a simple and linear timecomplexity method, which employs generalized morpholo-gical operators (GMO) [1] based on distance transform andintegral image [31], to eliminate the impulsive noise.In the result decision stage, most of minutiae-based
fingerprint matching approaches use estimate mechanismsto determine the threshold. In addition to the estimatemechanisms, a great deal of literature has presented someingenious technologies related to the use of machinelearning methods for final decision making. From apractical point of view, fingerprint verification has alsobeen studied as a two-class classification problem by using
ARTICLE IN PRESSJ. Jia et al. / Neurocomputing 70 (2007) 849–858 851
a number of machine learning paradigms, for example:neural networks, decision trees and SVMs [3,7,8,25,30].For example, the approach presented in [12] combines thefeatures extracted by FingerCode with Parzen WindowClassifier (PWC) [5]. These studies have shown perfor-mance gains with trained classifiers, and favored SVMsover neural networks and decision trees.
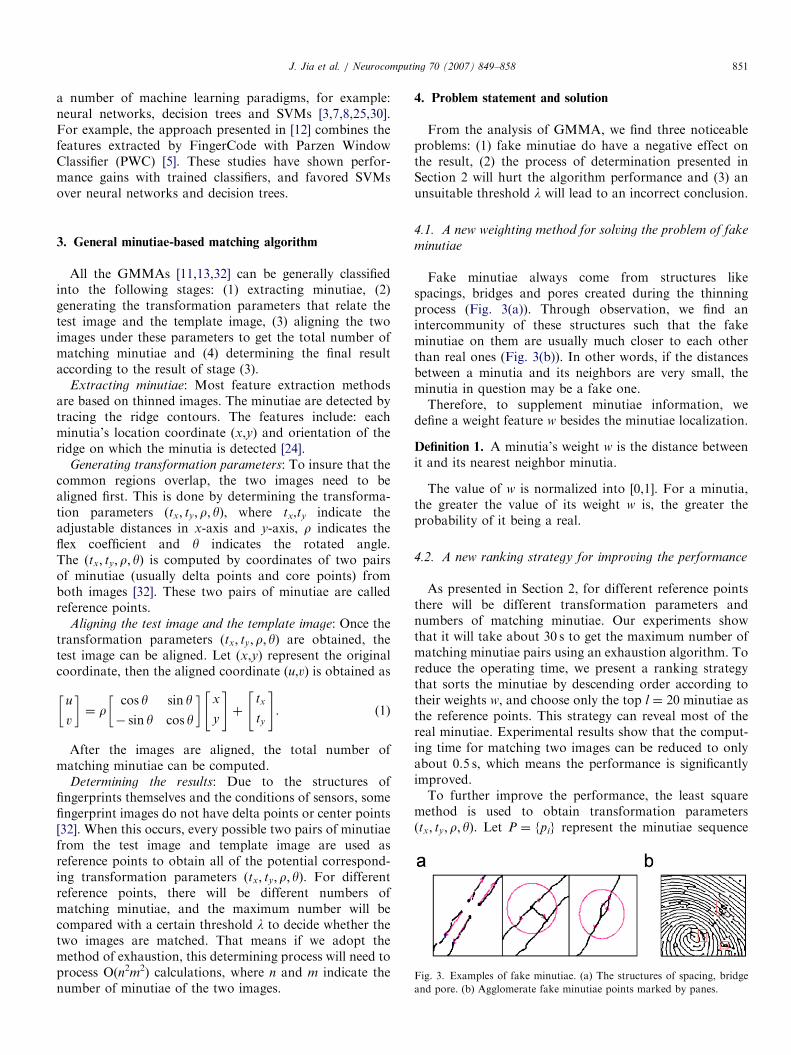
Fig. 3. Examples of fake minutiae. (a) The structures of spacing, bridge
and pore. (b) Agglomerate fake minutiae points marked by panes.
3. General minutiae-based matching algorithm
All the GMMAs [11,13,32] can be generally classifiedinto the following stages: (1) extracting minutiae, (2)generating the transformation parameters that relate thetest image and the template image, (3) aligning the twoimages under these parameters to get the total number ofmatching minutiae and (4) determining the final resultaccording to the result of stage (3).
Extracting minutiae: Most feature extraction methodsare based on thinned images. The minutiae are detected bytracing the ridge contours. The features include: eachminutia’s location coordinate (x,y) and orientation of theridge on which the minutia is detected [24].
Generating transformation parameters: To insure that thecommon regions overlap, the two images need to bealigned first. This is done by determining the transforma-tion parameters (tx; ty;r; y), where tx,ty indicate theadjustable distances in x-axis and y-axis, r indicates theflex coefficient and y indicates the rotated angle.The (tx; ty;r; y) is computed by coordinates of two pairsof minutiae (usually delta points and core points) fromboth images [32]. These two pairs of minutiae are calledreference points.
Aligning the test image and the template image: Once thetransformation parameters (tx; ty;r; y) are obtained, thetest image can be aligned. Let (x,y) represent the originalcoordinate, then the aligned coordinate (u,v) is obtained as
u
v
� �¼ r
cos y sin y
� sin y cos y
� �x
y
" #þ
tx
ty
" #. (1)
After the images are aligned, the total number ofmatching minutiae can be computed.
Determining the results: Due to the structures offingerprints themselves and the conditions of sensors, somefingerprint images do not have delta points or center points[32]. When this occurs, every possible two pairs of minutiaefrom the test image and template image are used asreference points to obtain all of the potential correspond-ing transformation parameters (tx; ty;r; y). For differentreference points, there will be different numbers ofmatching minutiae, and the maximum number will becompared with a certain threshold l to decide whether thetwo images are matched. That means if we adopt themethod of exhaustion, this determining process will need toprocess O(n2m2) calculations, where n and m indicate thenumber of minutiae of the two images.
4. Problem statement and solution
From the analysis of GMMA, we find three noticeableproblems: (1) fake minutiae do have a negative effect onthe result, (2) the process of determination presented inSection 2 will hurt the algorithm performance and (3) anunsuitable threshold l will lead to an incorrect conclusion.
4.1. A new weighting method for solving the problem of fake
minutiae
Fake minutiae always come from structures likespacings, bridges and pores created during the thinningprocess (Fig. 3(a)). Through observation, we find anintercommunity of these structures such that the fakeminutiae on them are usually much closer to each otherthan real ones (Fig. 3(b)). In other words, if the distancesbetween a minutia and its neighbors are very small, theminutia in question may be a fake one.Therefore, to supplement minutiae information, we
define a weight feature w besides the minutiae localization.
Definition 1. A minutia’s weight w is the distance betweenit and its nearest neighbor minutia.
The value of w is normalized into [0,1]. For a minutia,the greater the value of its weight w is, the greater theprobability of it being a real.
4.2. A new ranking strategy for improving the performance
As presented in Section 2, for different reference pointsthere will be different transformation parameters andnumbers of matching minutiae. Our experiments showthat it will take about 30 s to get the maximum number ofmatching minutiae pairs using an exhaustion algorithm. Toreduce the operating time, we present a ranking strategythat sorts the minutiae by descending order according totheir weights w, and choose only the top l ¼ 20 minutiae asthe reference points. This strategy can reveal most of thereal minutiae. Experimental results show that the comput-ing time for matching two images can be reduced to onlyabout 0.5 s, which means the performance is significantlyimproved.To further improve the performance, the least square
method is used to obtain transformation parameters(tx; ty; r; y). Let P ¼ {pi} represent the minutiae sequence

ARTICLE IN PRESS
Fig. 4. Explanation for SVM. (a) For circles A and B, their projection to
either axis has superposition. But in two-dimensional space, they are
linear-dividable, which means the line l can divide them. (b) An SVM is a
hyperplane that separates the positive and negative examples with
maximum margin. The examples closest to the hyperplane are called
support vectors.
J. Jia et al. / Neurocomputing 70 (2007) 849–858852
of test image and Q ¼ {qi} represent the sequence oftemplate image:
P ¼ fðx1; y1Þ; . . . ; ðxn; ynÞg,
Q ¼ fðu1; v1Þ; . . . ; ðun; vnÞg, ð2Þ
where n represents the number of minutiae in a image. Leta ¼ r cos y; b ¼ r sin y, e ¼ tx, f ¼ ty, then Eq. (1) can bedescribed as
u
v
� �¼
a b
�b a
� �x
y
" #þ
e
f
" #. (3)
If T ransðxi; yiÞT¼ ðu0i; v
0iÞT, then the square error � can be
given by
�2 ¼Xn
i¼1
ððui � u0iÞ2þ ðvi � v0iÞ
2Þ
¼Xn
i¼1
ððui � axi � byi � eÞ2 þ ðvi þ bxi � ayi � f Þ2Þ. ð4Þ
Using least square method, the transformation para-meters of a, b, c, f are
½a b e f �T ¼ A�1C, (5)
where A and C can be computed as
A ¼
Pðx2
i þ y2i Þ 0
Pxi
Pyi
0Pðx2
i þ y2i Þ
Pyi �
PxiP
xi
Pyi n 0P
yi �P
xi 0 n
2666664
3777775,
C ¼
Pðuixi þ viyiÞPðuiyi � vixiÞP
uiPvi
2666664
3777775. ð6Þ
4.3. SVM classifier
GMMAs normally determine the final result by compar-ing threshold l to the total number of matching minutiae t.That is a one-dimensional method, which means the valueof l plays a key role in determining the final result. Insteadof estimating a threshold l, we present a method that uses ahyperplane and a set of matching vectors, which stand forthe similarity of fingerprints. That means we transform theproblem, which is hard to solve in one-dimensional spaceinto a multidimensional space challenge. This can beexplained clearly by Fig. 4(a).
Therefore, we choose SVM which has shown out-standing classification performance in practice as theclassifier [4,34]. SVM is based on a solid theoreticalfoundation—structural risk minimization [29], and itssimplest linear form is shown in Fig. 4(b). The large
margin between positive and negative examples has beenproven to lead to good generalizations [29].
5. A matching scheme based on weighting method and SVM
classifier
Before matching steps, fingerprint preprocessingmust be accomplished first. Here we use an enhancingalgorithm based on estimated local ridge orientationand frequency and filter the image using Gabor filters[10]. Our matching approach is outlined in the followingsections.
5.1. Extracting the minutiae features
For each minutia, we define a 5-tuple (x; y; type; theta;w)to describe its features. The x and y indicate the minutia’scoordinate. The value of type, 1 or 2, indicates that whetherthe minutia is an ending or a bifurcation. Theta indicatesthe tangent angle of the ridge where the minutia is located,and w indicates the minutia’s weight. The 5-tuple(x; y; type; theta;w) is obtained using the following steps(Fig. 5):Let Itest represent the test image, and Itemp represent the
template image.For Itest and Itemp:Step 1: Perform image normalization, and then estimate
the local orientation and frequency. After that, a thresholdimage can be obtained by filtering the image [10].
Step 2: Perform ridge thinning, and then extract thecoordinate (x,y) and orientation theta of each minutia.
Step 3: Compute the distance between each minutia andits nearest neighbor minutia to obtain each minutiae’sweight, w.
Step 4: Sort the minutiae by descending order accordingto their weights w.That means, for each fingerprint image, we get a
minutiae sequence p1; p2; . . . ; pn with degressive weights.

ARTICLE IN PRESS
Fig. 5. Fingerprint image preprocessing and minutiae extraction. (a) Raw
image. (b) Threshold image. (c) Thinned image with minutiae.
J. Jia et al. / Neurocomputing 70 (2007) 849–858 853
5.2. Matching the minutiae under the optimal
transformation parameters
Let p1; p2; . . . ; pn represent the minutiae sequence of Itestand q1; q2; . . . ; qm represent the sequence of Itemp. Wecompute the total number of matching minutiae by thefollowing steps:
Step 1: Choose the top l ¼ 20 minutiae {pi} (1pipl) and{qj} (1pjpl) from the two sequences as the referencepoints.
Step 2: For pi, qj (1pi, jpl), if they have the same valueof type, add (pi, qj) to set A.
For every two members (pi1, qj1), (pi2, qj2)AA, doSteps 3–5.
Step 3: Compute the transformation parameters(tx; ty;r; y) according to (pi1, qj1) and (pi2, qj2) by Eqs. (5)and (6).
Step 4: Select (tx; ty;r; y), if r� 1�� ��40:1 or yp=3, skip
Step 5. This selection ensures that the flex coefficient rapproaches 1 and the rotation angle y is less than p=3.
Step 5: For p1; p2; . . . ; pn, compute their new coordinatesand orientations according to Eq. (1), then match themwith q1; q2; . . . ; qm. Record the number of matchingminutiae pairs.
After every two members (pi1, qj1), (pi2, qj2)AA have beenchosen to finish from Steps 3–5, record the maximumnumber of matching minutiae pairs t and the correspond-ing translation parameters (t0x; t
0y; r0; q0).
Algorithm minutiae matchingObjective: compute the total number of matching minutiaebetween the test image and the template imageInput:
Itest: the test image.Itemp: the template image.{pn}: the minutiae sequence of Itest with degressive
weights.{qm}: the minutiae sequence of Itemp with degressive
weights.Output:
the maximum number of matching minutiae pairs: t.Method:{
int i, j, t[i];
int l ¼ 20;For (1pipl; 1pjpl)
if type [pi] ¼ type [qj]add (pi,qj) to set A
For (8(pi1,qj1), (pi2, qj2)AA){
compute (tx; ty;r; y) by Eq. (5) and
Eq. (6);ifðjr� 1jp0:1kypp=3Þ{
For (0oion+1){compute (xi,yi,thetai)new by Eq. (1);{pi}new ¼ {(xi, yi, thetai)new};}
match {pi}new with {qj};t[i] ¼ the number of matching minutiae
pairs;}
}t ¼Max ({t[i]});return t;
}
5.3. Determining the results using matching vector and SVM
We define a matching vector V(n, m, t, ave, err) todescribe the similarity of Itest and Itemp. Vector V isobtained using the following steps:
Step 1: Record the minutiae number n of Itest and m ofItemp, and maximum matching minutiae number t.
Step 2: For the matching minutiae pairs, let v1; v2; . . . ; vt
present the weights of the minutiae in Itest and u1; u2; . . . ; ut
present the weights of the minutiae in Itemp. Let ave
represent an average of the weight values of these matchingminutiae, and ave is calculated by
ave ¼Xt
i¼1
2uivi
ui þ vi
: (7)
Step 3: Get a 100 pixel� 100 pixel subimage Isub fromthe center of the threshold image of Itest. Translate Isub, byparameters (t0x; t
0y; r0; y0) to I0sub, and let err represent the
number of pixels in I0sub that have the same intensity as itscorresponding pixel in Itemp. The err describes an estima-tion of the matching error.For a matching vector V(n, m, t, ave, err), we need to
label it with ‘‘matching success’’ or ‘‘matching failure’’. Thedecision function of an SVM is shown in
f ðVÞ ¼ hw � Vi þ b. (8)
The hw � Viis the dot product between w (the normalvector to the hyperplane) and V (the matching vector). Themargin for an input vector V i is yif ðV iÞ where yi 2 �1; 1f g
is the class label for V i. Seeking the maximum margin canbe expressed as minimizing hw � wi subject to yiðhw � V ii
ARTICLE IN PRESS
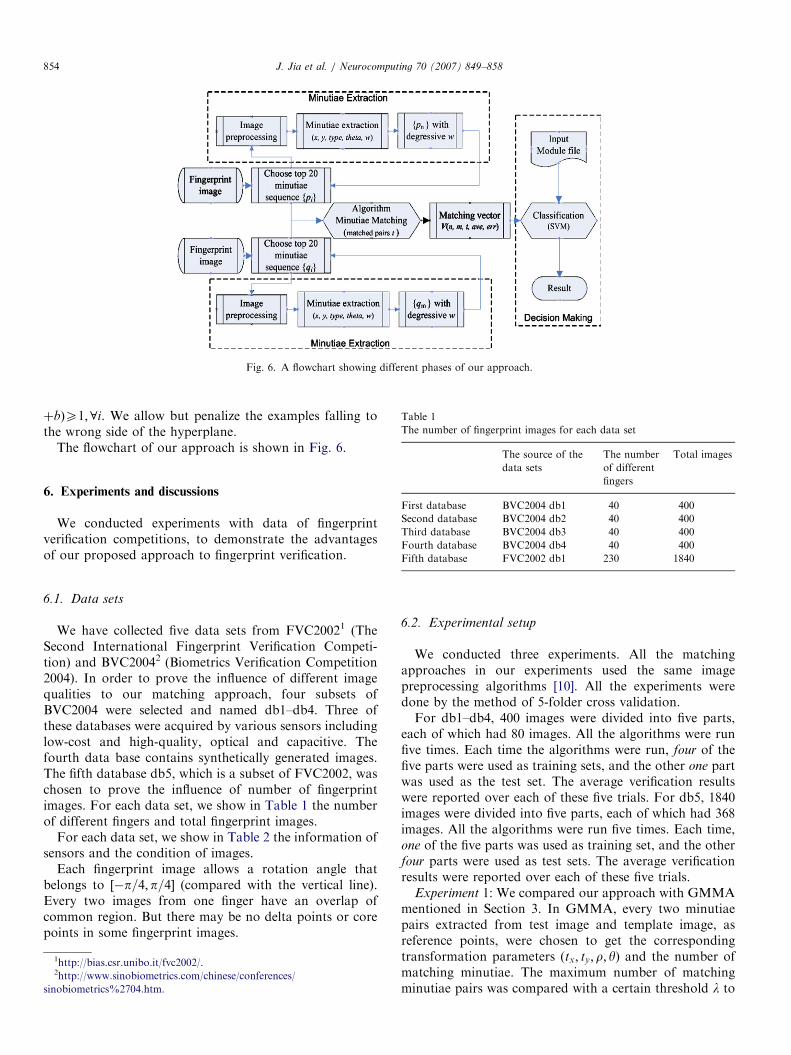
Fig. 6. A flowchart showing different phases of our approach.
Table 1
The number of fingerprint images for each data set
The source of the The number Total images
J. Jia et al. / Neurocomputing 70 (2007) 849–858854
þbÞX1;8i. We allow but penalize the examples falling tothe wrong side of the hyperplane.
The flowchart of our approach is shown in Fig. 6.
data sets of different
fingers
First database BVC2004 db1 40 400
Second database BVC2004 db2 40 400
Third database BVC2004 db3 40 400
Fourth database BVC2004 db4 40 400
Fifth database FVC2002 db1 230 1840
6. Experiments and discussions
We conducted experiments with data of fingerprintverification competitions, to demonstrate the advantagesof our proposed approach to fingerprint verification.
6.1. Data sets
We have collected five data sets from FVC20021 (TheSecond International Fingerprint Verification Competi-tion) and BVC20042 (Biometrics Verification Competition2004). In order to prove the influence of different imagequalities to our matching approach, four subsets ofBVC2004 were selected and named db1–db4. Three ofthese databases were acquired by various sensors includinglow-cost and high-quality, optical and capacitive. Thefourth data base contains synthetically generated images.The fifth database db5, which is a subset of FVC2002, waschosen to prove the influence of number of fingerprintimages. For each data set, we show in Table 1 the numberof different fingers and total fingerprint images.
For each data set, we show in Table 2 the information ofsensors and the condition of images.
Each fingerprint image allows a rotation angle thatbelongs to ½�p=4;p=4� (compared with the vertical line).Every two images from one finger have an overlap ofcommon region. But there may be no delta points or corepoints in some fingerprint images.
1http://bias.csr.unibo.it/fvc2002/.2http://www.sinobiometrics.com/chinese/conferences/
sinobiometrics%2704.htm.
6.2. Experimental setup
We conducted three experiments. All the matchingapproaches in our experiments used the same imagepreprocessing algorithms [10]. All the experiments weredone by the method of 5-folder cross validation.For db1–db4, 400 images were divided into five parts,
each of which had 80 images. All the algorithms were runfive times. Each time the algorithms were run, four of thefive parts were used as training sets, and the other one partwas used as the test set. The average verification resultswere reported over each of these five trials. For db5, 1840images were divided into five parts, each of which had 368images. All the algorithms were run five times. Each time,one of the five parts was used as training set, and the otherfour parts were used as test sets. The average verificationresults were reported over each of these five trials.
Experiment 1: We compared our approach with GMMAmentioned in Section 3. In GMMA, every two minutiaepairs extracted from test image and template image, asreference points, were chosen to get the correspondingtransformation parameters (tx; ty;r; y) and the number ofmatching minutiae. The maximum number of matchingminutiae pairs was compared with a certain threshold l to

ARTICLE IN PRESS
Table 2
The information of sensors and images for each data set
Sensor type Manufacturer Image size Resolution (dpi)
First database Optical sensor URU 4000 412� 362 500
Second database CMOS sensor Fujitsu MBF200 256� 300 500
Third database Thermal sweeping Sensor Atmel 300� 480 500
Fourth database – Fingerpass 380� 460 500
Fifth database Optical sensor TouchView II 388� 374 500
Table 3
FNMR and FMR obtained from db1 to db4
FNMR FMR
Our approach (%) GMMA (%)
First database 2.03 6.67 �0
Second database 12.78 30.28 �0
Third database 7.78 24.17 �0
Fourth database 5.28 13.05 �0
Table 4
FNMR and FMR obtained from db5
FNMR FMR (%) Max match memory
(our approach)
J. Jia et al. / Neurocomputing 70 (2007) 849–858 855
decide whether the two images are matched. Now we justset l ¼ 13 manually.
Experiment 2: We compared our approach to ourapproach without the weighting method.
Experiment 3: We evaluated our approach’s performanceby choosing top l (l ¼ 10, 20, 30, n) minutiae from minutiaesequence p1; p2; . . . ; pn with degressive weights.
Our matching approach was written in C++ andcompiled by Microsoft Visual Studio 6.0 (VC++ 6.0).All the experiments were performed on the same computer.The configuration of the running computer is PIV1.0G,256M DDR. The operating system in use was MicrosoftWindows XP.
We used SVMlight3 for the implementation of SVM [34],and took linear kernel in experiments.
(K byte)
Our approach
(%)
GMMA (%)
4.08 13.84 0.1 6028
15
20
(%
)
Our approach
Our approach
without weighting method
6.3. Measures
The accuracy of the fingerprint verification algorithmwas measured by false non-match rate (FNMR: eachsample in the subset A is matched against the remainingsamples of the same finger), false match rate (FMR: thefirst sample of each finger in the subset A is matchedagainst the first sample of the remaining fingers in A) andthe average time of matching two images in our experi-ments. Especially for database 5, we also measure themaximum memory size of our approach.
db1 db2 db3 db4 db5 average
0
5
10
FN
MR
Different databases
Fig. 7. Comparison of the FNMR of our approach and GMMA in five
different data sets.
6.4. Experimental results and discussions
We first performed five data sets of experiments, all ofwhich examined the accuracy of our approach comparedwith GMMA. Tables 3 and 4 show the FNMR and FMRresults of db1–db5.
The FNMR and FMR results of db1–db4 are shown inTable 3. We see that our approach achieves much betteraccuracy than GMMA for fingerprint verification. Asshown in Table 2, sensors of different types capturefingerprints of these four data sets, so the images are ofvarying degree of quality. This strongly suggests that ourfeature extraction and SVM methods capture well theinformation needed for fingerprint verification, and are notsignificantly influenced by fingerprint image quality.
3http://svmlight.joachims.org/.
The FNMR and FMR results of db5 are shown inTable 4. We see that although the proportion of trainingsets is reduced, and the number of test members isincreased, our approach still works better than GMMA,and the maximum memory for matching a pair offingerprints is also acceptable. We think this is because of

ARTICLE IN PRESS
Table 5
FNMR and FMR obtained from db1 and db2 choosing different minutiae
number l from minutiae sequence p1; p2; . . . ; pn with degressive weights
FNMR FMR
l1 ¼ 10
(%)
l2 ¼ 20
(%)
l3 ¼ 30
(%)
l4 ¼ n
(%)
First database 6.75 2.03 3.31 3.93 �0
Second database 29.05 12.78 15.17 16.23 �0
l1=10 l2=20 l3=30 l4=n
0
5
10
15
20
25
30
FN
MR
(%
)
Different minutiae sequence number
database 1 database 2
Fig. 8. Comparison of the FNMR of our approach using different
minutiae sequence number l in two different data sets.
db1 db2 db3 db4 db5
0.1
1
10
100
Avera
ge m
atc
hin
g t
ime (
Lo
g)
Different databases
Our approach GMMA
Fig. 9. Comparison of the average matching time of our approach and
GMMA in five different data sets.
Table 6
Average time of matching two fingerprints obtained from db1 to db5
First database (s) Second database (s)
Our approach 1.003 0.603
GMMA X30
J. Jia et al. / Neurocomputing 70 (2007) 849–858856
the fact that SVM makes effective use of the matchingvectors to enhance classification.Then we turn to examine the accuracy of our approach,
compared with our approach without weighting method.The experimental results are shown in Fig. 7.We can see that our approach outperforms our approach
without the weighting method in all the five databases. Andthe FNMR result is 4.92% better when using minutiaeweighting method on average. It shows that the minutiaeweighting method is very effective in decreasing theinfluence of fake minutiae.We also evaluated our approach’s performance by
choosing different number l of minutiae from minutiaesequence: l ¼ 10, 20, 30 and n. Their performances on db1and db2 are displayed in Table 5 and Fig. 8.It is shown that the result is the best when l is assigned to
20 for both data sets. When l is set more than 20, theFNMR will be a little higher. The reason is that more fakeminutiae are evolved in the matching process.And when l is set to 10, the results are also not good
because the minutiae selected from the two images are notmatched even though they are usually all real minutiae.The time performance obtained from db1 to db5 are
shown in Fig. 9. The average time for matching twofingerprints using our approach is only one-thirtieth lessthan GMMA (Table 6). This strongly suggests that ourweighting method improves time performance significantly.In addition, the creation of the template of a pair offingerprints (training stage) takes �4 s on a PIV1.0G,256M DDR computer, and the creation of the template ofa pair of fingerprints (testing stage) takes �0.5 s on thesame computer.It must be mentioned that our matching approach
successfully uses weighting features and ranking strategy toavoid detecting core points in two fingerprints aligningprocess. Core point detection is mostly used to align thetest image and the template image. But in some images thecore point may be present close to the boundary ofthe image, or may not even be present [19], which will leadto an error in the final decision.
7. Conclusions
Our main contributions to fingerprint verification in thispaper include the following: (1) a weighting method wasproposed to supplement minutiae information for finger-print images of poor quality. (2) The traditional minutiae-based matching task was translated to a classification taskusing a powerful SVM classifier.
Third database (s) Fourth database (s) Fifth database (s)
1.024 0.831 0.583
X30

ARTICLE IN PRESSJ. Jia et al. / Neurocomputing 70 (2007) 849–858 857
Future work may include the examination of largerdatabases to verify the performance of our approach, andhow to use transductive SVM (TSVM) [14] instead of SVMto improve the matching performance.
Acknowledgment
We would like to thank the anonymous reviewers fortheir helpful comments and suggestions.
References
[1] G. Agam, I. Dinstein, Generalized morphological operators applied
to map-analysis, in: Proceedings of SSPE’96, 1996, pp. 60–69.
[2] A.M. Bazen, G.T.B. Verwaaijen, Correlation based fingerprint
verification system, in: Proceedings Program for Research on
Integrated Systems and Circuits, Veldhoven, The Netherlands,
1 November–29 December, 2000, pp. 205–213.
[3] S. Ben-Yacoub, Y. Abdeljaoued, E. Mayoraz, Fusion of face and
speech data for person identity verification, IEEE Trans. Neural
Networks 10 (5) (1999) 1065–1074.
[4] N. Cristianini, J. Shawe-Taylor, An Introduction to Support Vector
Machines, Cambridge University Press, Cambridge, UK, 2000.
[5] R. Duda, P. Hart, D. Stork, Pattern Classification, Wiley, New York,
2000.
[6] Federal Bureau of Investigation (FBI), The Science of Finger-
prints: Classification and Uses, US Government Printing Office,
Washington, DC, 1984.
[7] J. Fierrez-Aguilar, J. Ortega-Garcia, D .Garcia-Romero, J. Gonzalez-
Rodriguez, A comparative evaluation of fusion strategies for multi-
modal biometric verification, in: Proceedings of the IAPR Interna-
tional Conference on Audio and Video-Based Person Authentication,
AVBPA, Springer, Berlin, 2003, pp. 830–837.
[8] B. Gutschoven, P. Verlinde, Multi-modal identity verification using
support vector machines (SVM), in: Proceedings of the International
Conference on Information Fusion, FUSION, IEEE Press,
New York, 2000, pp. 3–8.
[9] J. Hollingum, Automated fingerprint analysis offers fast verification,
Sens. Rev. 12 (3) (1992) 12–15.
[10] L. Hong, Y.F. Wang, A. Jain, Fingerprint image enhancement:
algorithm and performance evaluation, IEEE Trans. Pattern Anal.
Mach. Intell. 20 (8) (1998).
[11] A. Jain, L. Hong, On-line fingerprint verification. IEEE Trans.
Pattern Anal. Mach. Intell. 19 (4) (1997) 302–314.
[12] A. Jain, S. Prabhakar, L. Hong, S. Pankanti, Filterbank-based
fingerprint matching, IEEE Trans. Image Process. 5 (9) (2000)
846–859.
[13] A. Jain, A. Ross, S. Prabhakar, Fingerprint matching using minutiae
and texture features, in: International Conference on Image Proces-
sing (ICIP), Thessaloniki, Greece, 2001, pp. 282–285.
[14] T. Joachims, Transductive inference for text classification using
support vector machines, in: Proceedings of the 16th International
Conference on Machine Learning (ICML), Bled, Slovenia, 1999,
pp. 200–209.
[15] C.J. Lee, S.D. Wang, A Gabor filter-based approach to fingerprint
recognition, in: IEEE Workshop on Signal Processing System, SiPS
99, 1999, pp. 371–378.
[16] S. Madhvanath, G. Kim, V. Govindaraju, Chain code processing for
handwritten word recognition, IEEE Trans. Pattern Anal. Mach.
Intell. 21 (1997) 928–932.
[17] D. Maio, Direct gray-scale minutiae detection in fingerprints, IEEE
Trans. Pattern Anal. Mach. Intell. 19 (1) (1997) 27–40.
[18] D. Maio, D. Maltoni, A.K. Jain, S. Prabhakar, Handbook of
Fingerprint Recognition, Springer, New York, 2003.
[19] D. Maio, L. Nanni L, An efficient fingerprint verification system
using integrated gabor filters and Parzen Window Classifier,
Neurocomputing 68 (2005) 208–216.
[20] B.M. Mehtre, N.N. Murthy, A minutia based fingerprint identifica-
tion system, in: Proceedings of the Second International Conference
in Advances in Pattern Recognition and Digital Techniques,
Calcutta, 1986.
[21] E. Newham, The Biometric Report, SJB Services, New York, 1995.
[22] L. O’Gorman, J.V. Nickerson, An approach to fingerprint filter
design, Pattern Recognition 22 (1) (1989) 29–38.
[23] F. Pernus, S. Kovacic, L. Gyergyek, Minutiae-based fingerprint
recognition, in: Proceedings of the Fifth International Conference on
Pattern Recognition, 1980, pp. 1380–1382.
[24] N.K. Ratha, S. Chen, A. Jain, Adaptive flow orientation-based
feature extraction in fingerprint images, Pattern Recognition 28 (11)
(1995).
[25] A. Ross, A. Jain, Information fusion in biometrics, Pattern
Recognition Lett. 24 (13) (2003) 2115–2125.
[26] B.G. Sherlock, D.M. Monro, K. Millard, Algorithm for enhancing
fingerprint images, Electron. Lett. 18 (1992) 28.
[27] Z. Shi, V. Govindaraju, Segmentation and recognition of connected
handwritten numeral strings, J Pattern Recognition 30 (9) (1997)
1501–1504.
[28] D. Simon-Zorita, J. Ortega-Garcia, S. Cruz-Llanas, J.L. Sanchez-
Bote, J. Glez-Rodriguez, An improved image enhancement scheme
for fingerprint minutiae extraction in biometric identification, in:
Proceedings of the Third International Conference on Audio and
Video-Based Biometric Person Authentication AVBPA’01, in:
J. Bigun, F. Smeraldi (Eds.), Lecture Notes in Computer Science,
vol. 2091, 2001, pp. 217–222.
[29] V.N. Vapnik, The Nature of Statistical Learning Theory, Springer,
Berlin, Heidelberg, New York, 2000.
[30] P. Verlinde, G. Chollet, M. Acheroy, Multi-modal identity verifica-
tion using expert fusion, Inf. Fusion 1 (1) (2000) 17–33.
[31] P. Viola, M. Jones, Robust real-time face detection, Int. J. Comput.
Vision 57 (2) (2004) 137–154.
[32] C.W. Wang, J.W. Li, Fingerprint identification using point pattern
matching, J. Chongqing Univ. (Nat. Sci. Edn.) 25 (6) (2002).
[33] J.H. Wegstein, An Automated Fingerprint Identification System, US
Government Publication, Washington, 1982.
[34] Y. Yuan, F. Paolo, P. Massimiliano, Fingerprint classification with
combinations of support vector machines, Lecture Notes in
Computer Science, vol. 2091, Springer, Berlin, Heidelberg, New
York, 2001, pp. 253–258.
Jia Jia received the B.E. degree in computer
science and technology from Tsinghua Univer-
sity, Beijing, China, in 2003. She is now a Ph.D.
candidate of the Key Laboratory of Pervasive
Computing (Tsinghua University), Ministry of
Education. Her research interests include
biometrics, pattern recognition and image
processing.
Lianhong Cai is now a professor with the Depart-
ment of Computer Science and Technology,
Tsinghua University. She directs the Human–
Computer Speech Interaction Group. Prof. Cai is
a member of Multimedia Committee of Chinese
Graphics and Image Society, and a member of
Chinese Acoustics Society. She has been awarded
Scientific Progress Prizes and the Invention Prizes
from the Ministry of Mechanism and Electronics,
and the Ministry of Education.

ARTICLE IN PRESSJ. Jia et al. / Neurocomputing 70 (2007) 849–858858
Pinyan Lu received the B.E. degree in computer
science and technology from Tsinghua University,
Beijing, China, in 2005. He is currently a first year
graduate student at Tsinghua University in
theoretical computer science. His research inter-
ests include algorithms and complexity theory.
Xuhui Liu received the B.E. degree in computer
science and technology from Tsinghua University,
Beijing, China, in 2005. He is currently a first year
graduate student at Tsinghua University in
Database Laboratory, Institute of Software De-
partment of Computer Science and Technology.
His research interests include database and soft-
ware engineering.