fis i final apunte mc
DESCRIPTION
Final de fisica 1 para quimicos fcen ubaTRANSCRIPT

Mariano Calcabrini ‐1‐
Física I (Q)
Primer Cuatrimestre 2014
Sistema de coordenadas
Un sistema de coordenadas de un espacio n‐dimensional es una construcción que nos permite
ubicarnos en ese espacio. Está constituido por n familias de curvas (no necesariamente rectas)
que cubren todo el espacio y por un origen a partir del cual se toman estas referencias.
Por ejemplo:
En este marco cabe definir lo que es un vector. La definición de un vector como un segmento
orientado con módulo, origen dirección y sentido es escueta.
Un vector es un elemento de un espacio vectorial, y esto implica que si y son vectores del
mismo espacio, entonces:
1) , es un vector del mismo E.V.
2) . , , … donde el nuevo vector también es del mismo E.V
3) Si es un vector tal que sus coordenadas en una base del EV son , , las coordenadas
del mismo vector en otra base, , son una combinación lineal de , .

Mariano Calcabrini ‐2‐
Dinámica del punto
Principio de inercia
Todo cuerpo permanece en estado de reposo o de MRU siempre que esté libre de acciones
exteriores (Newton‐Galileo no define fuerza antes de postular este principio, por lo que
resulta erróneo – para Chimento‐ hablar de fuerzas)
Principio de masa
La suma de todas las acciones exteriores a un cuerpo (fuerzas) es proporcional a la aceleración
del mismo. La constante de proporcionalidad de esta relación es la masa inercial. La masa que
se mide en una balanza no requiere de un movimiento para ser medida por lo que se la llama
masa gravitatoria. Ningún experimento de mecánica clásica encontró hasta ahora diferencias
entre ambas masas.
Wiki: Según una definición clásica, fuerza es todo agente capaz de modificar la cantidad de
movimiento o la forma de los materiales.
Principio de acción y reacción
Para cada acción que se observa en un cuerpo que interactúa con otro se observa una
reacción de igual magnitud y dirección pro de sentido opuesto sobre el segundo cuerpo.
Para analizar esta interacción se estudia con frecuencia el d.c.l. de un cuerpo sobre la tierra
(2). Pero primero conviene analizar un cuerpo cayendo (1).
Cuando el cuerpo está cayendo solo actúa la fuerza de gravedad (rojo) sobre ambos cuerpos.
Cuando los cuerpos están en contacto aparecen fuerzas de vínculo normales a la superficie
(azul)
Fuerzas de vínculo
No hay una teoría general sobre las interacciones de vínculo, son fuerzas que aparecen
cuando hay cuerpos vinculados (en contacto o por medio de sogas, vigas, varas...).

Mariano Calcabrini ‐3‐
Fuerza de rozamiento
Cuando hay fuerzas tangentes a dos superficies en contacto aparecen fuerzas que se oponen
al desplazamiento de las superficies.
Si quiero mover un cuerpo, en un primer momento, el cuerpo no se mueve, sin importar que
fuerza le aplique. Estos sucede hasta que se logra una fuerza límite, la Frmáx, una vez que se
superó este valor de fuerza el cuerpo comienza a moverse con una aceleración que crece con
la fuerza aplicada.
.
.
Estas fuerzas dependen de las superficies en contacto, y de la normal del cuerpo sobre la
superficie, un cuerpo que ejerce más fuerza sobre la superficie “se queda más pegado”.
Ley de Hooke
Hooke estudió materiales con comportamiento elástico. Estos materiales, por ejemplo un
resorte o una bandita elástica se deforman al aplicarse una fuerza y luego vuelven a su forma
original, ejerciendo una fuerza. Después de determinada fuerza límite, las deformaciones son
plásticas e irreversibles. Los materiales plásticos se deforman (módulo de Young) hasta
romperse.

Mariano Calcabrini ‐4‐
Hooke colgó pesas de resortes para aplicar sobre ellas distintas fuerzas.
Sobre la masa actúan el peso y la fuerza elástica, y como las masas están en una condición
estática, peso y fuerza elástica coinciden en módulo.
Hooke observó una relación proporcional entre la fuerza elástica y el estiramiento del resorte.
Además la fuerza elástica se opone al desplazamiento, por lo que planteo:
. ∆
Donde K, la constante elástica, depende solamente del resorte.
Resortes en condición estática
El estudio de resortes en condiciones estáticas se centra en dos condiciones bien estudiadas:
resortes en serie y resortes en paralelo.
En serie:
Si tenemos resortes en serie y queremos estudiar al sistema como un único resorte tenemos:
∆ ∆ ∆

Mariano Calcabrini ‐5‐
El primer resorte funciona como un vínculo transmitiendo la fuerza, entonces: .
De ahí se deduce:
1 1 1
.
En paralelo:
∆ ∆ ∆
Y además:
. ∆ ∆ ∆
Resortes en movimiento – Modelo oscilatorio
Si se comprime o estira un resorte y se lo suelta, este oscila alrededor de una posición de
equilibrio.
Planteando Newton:
.
.
La solución de esta ecuación diferencial debe ser una función que cambie de signo una vez al
derivarla dos veces… seno y coseno resuelven la ecuación… y con un poco de algebra…

Mariano Calcabrini ‐6‐
. cos .
A y ϕ son las dos “constantes de integración” (son las constantes de la CL de las soluciones.
A, la amplitud, da cuenta de que tan grande es la oscilación alrededor del punto de equilibrio.
El término que acompaña a t, es la frecuencia de oscilación, y da cuenta de que tan
rápido cambia de fase el seno o coseno que solucionan la ecuación diferencial. Por último, ϕ,
la fase o desfasaje, indica donde comienza la oscilación. A y ϕ dependen de las condiciones
iniciales del sistema.
Energía y trabajo
Definición: el trabajo de una fuerza es la integral de línea de la fuerza sobre la trayectoria
donde se aplica la misma.
Se define la energía cinética como el trabajo de todas las fuerzas:
∆ . . .
Para resolver esta integral tenemos que utilizar el siguiente cambio de variables:
. .
∆ . . .
∆ . .
∆12
Por otra parte, todas las fuerzas conservativas derivan de un campo conservativo (es
gradiente de una función C1, la difergencia del campo es 0 y la integral del campo sobre
cualquier curva cerrada da 0). Se define entonces la energía potencial (Chimento usa V, pero
V también se usa para potencial gravitatorio… otros autores usan U).
∆ .

Mariano Calcabrini ‐7‐
. ∆
Entonces:
∆ ∆
A esta suma de energías se la denomina energía mecánica. Si el trabajo de las fuerzas no
conservativas en nulo, ya sea porque no las hay o porque no realizan trabajo, entonces, la
energía mecánica no varía, se conserva.
Puntos de equilibrio estables e inestables
Si ∑ 0en un sistema, entonces 0 y se dice que ese punto es un punto de equilibrio.
En los puntos de equilibrio se extrema la energía potencia. Estos puntos pueden ser máximos
o mínimos de energía, para estudiarlo aproximamos la energía potencial con su polinomio de
Taylor alrededor del punto de equilibrio.
12
Derivando la expresión anterior:
0 012
. 2
. .
. .
Si realizamos el cambio de variablo , .
. 0
La ecuación corresponde a la ecuación de un oscilador armónico si el factor que acompaña a
Z es positivo. Si se da esto, tenemos un mínimo de energía, la posición oscila y el equilibrio es
estable.

Mariano Calcabrini ‐8‐
Si tuviésemos un máximo de energía la ecuación se resuelve con cosh y senh y la solución no
tiene un comportamiento oscilante. Entonces el equilibrio es inestable.
Conservación del impulso lineal
. .
Derivando :
. .
.
Todas las fuerzas internas son pares de acción y reacción (por eso son internas), entonces
∑ 0.
Si ∑ 0, entonces ∑ .
(El análisis correcto debe hacerse con vectores, pero es similar, y se concluye con él que la
conservación puede darse en algunas direcciones y en otras no.)
Choque unidimensional
Choque elástico
Si chocan dos cuerpos con velocidad constante, las únicas fuerzas exteriores son peso y
normal que se cancelan en todo momento, entonces hay conservación del impulso lineal
. . . .
. .

Mariano Calcabrini ‐9‐
Por otra parte, como el choque es elástico los cuerpos no se deforman, entonces no aparecen
fuerzas no conservativas que disipen trabajo (las normales son ortogonales a la trayectoria),
se conserva la energía cinética.
∆ 012
12
Dividiendo la expresión anterior por la obtenida planteando conservación del impulso lineal:
Choque plástico
En este choque no hay conservación de la energía. Las partículas se unen en una sola masa
con una única velocidad final.
. . .
. .
Se puede calcular la energía disipada en el choque planteado ∆ y reemplazando.
Conservación del impulso angular
0
Para un sistema de dos partículas 0 porque las fuerzas internas están en dirección radial y coinciden en módulo, entonces:
∆ . . 0
Si 0, entonces .

Mariano Calcabrini ‐10‐
Teorema de las áreas‐ Velocidad areolar
Consideremos un sistema de dos masas rotando.
Si Δt→0, las trayectorias se asemejan a una recta.
∆∆
2. . ∆ .
2
∆. . ∆ .
2
∆ ∆. . . ∆ .
2. . . ∆ .
2
∆ ∆∆2. . . . . . .
∆ ∆∆2.
Como no hay fuerzas externas, su momento es nulo entonces se conserva el impulso angular,
.
es la velocidad areolar.
Si consideramos el caso de la tierra orbitando alrededor del sol, es constante, y si la tierra
está más cerca del sol, debe ir más rápido, para cubrir la misma área, de ahí la diferencia en
la duración del verano en los hemisferios norte y sur.

Mariano Calcabrini ‐11‐
Cálculo del impulso angular desde un punto fijo respecto al CM
(Se puede probar que hay conservación con respecto a un punto fijo al CM o que se mueve
con el CM pero no se dio en la teórica, es algo similar a esto pero derviando…)
El último término es el momento angular del centro de masa y es constante.
Introducción al momento de inercia (comparar L con Ω)
La velocidad angular para un cuerpo rígido es una omega mayúscula porque físicos.
. . .
ΩΔΔ
≅ .1∆
≅ .∆
∆.
∆.
Entonces….

Mariano Calcabrini ‐12‐
Ω.
Por otro lado tenemos:
ΩΩ
AXBXC=(B.A)xC‐(C.A)xB
. Ω . Ω
En un MCU el impulso angular y la velocidad angular son colineales, pero en el caso más
general no, entonces podemos pensar en el momento de inercia como un operador que
transforma un vector en otro. Como es una transformación lineal es lógico pensar que este
operador, el momento de inercia (I), es una matriz (o un tensor si consideramos cuerpos
tridimensionales).
Momento de inercia
. . Ω
. . Ω. .
.
. . . 0
.

Mariano Calcabrini ‐13‐
. Ω
Hay ua TL sobre la velocidad angular… entonces es lógico pensar en un tensor.
Ω. .
/2(pero Chimento no lo aclara, define I como un mb^2 , pero ese b siempre es r porque
son ortogonales r y omega en un cuerpo en 2D…)
Para un cuerpo bidimensional el momento de inercia . es una matriz,
diagonalizable. Si la rotación se da en una única dirección se puede escribir a la misma en la
base de autovectores de la matriz
0 00 00 0
0 00 00 0
ΩΩΩ
Entonces cada coordenada es un producto de un escalar por la coordenada correspondiente
de la velocidad angular y se puede tratar al momento de inercia como un escalar.
Gravitación
Newton planteó que entre dos masas aparece una fuerza atractiva proporcional a las masas
e inversamente proporcional al cuadrado de la distancia entre las masas.
∝.
(no confundir con ley de Coulomb, esta fuerza es atractiva en todos los casos)
..
6.67 10.
Para masas que se mueven cerca de la superficie de la tierra es válido considerar que la
distancia es constante y coincide con el radio de la tierra, entonces todos los cuerpos tienen
la misma aceleración, g.

Mariano Calcabrini ‐14‐
. ..
⇒
.
¿Cómo varía la aceleración de la gravedad con la distancia?
Dentro de la tierra, asumimos una densidad uniforme (y que la masa que está más alla de la
distancia donde se estudia G no influye, esto es válido porque la densidad aumenta al
acercarse al núcleo y los errores introducidos por la hipótesis se compensan).
DENTRO:
. . . 43 . .43 .
. .43 .
1. . .
1. .
FUERA
.
Velocidad de escape
¿Qué velocidad de escape tiene que tener una masa m para escapar de una masa M?
.
. ..
Haciendo un reemplazo ya explicado .
. .
Integrando…

Mariano Calcabrini ‐15‐
.2
Cuando 0, ,
.2
Chimento hace otra cosa
Satélite sincrónico
.
. .
. . 2 .
En este caso queremos que la velocidad angular sea constante y que la distancia sea constante
(sincrónico), entonces:
.
Fm.M. Gr
. .
Despejando: .

Mariano Calcabrini ‐16‐
Teorema de Steiner o de ejes paralelos
. . ′
. . . ′. .
.
. ′. . 0, . . 2
Condición de rigidez
La distancia entre dos puntos cualesquiera del sólido es constante.
‖ ‖
Como la distancia entre dos puntos del rígido siempre es constante, entonces un punto solo
pude rotar con respecto a otro, pero no trasladarse.
Ω r
Ω r
Ω , (Eq. 1)
Como el CM puede trasladarse, se suele escribir la velocidad de un punto del cuerpo como:
Ω r (Eq. 2)
CONDICIÓN DE RIGIDEZ
. 0 r . Ω r

Mariano Calcabrini ‐17‐
Veamos ahora que la velocidad angular es la misma desde cualquier punto. Si coinciden, se
pude escribir la ecuación (1) a partir de la (2).
Ω
Ω r
Ω Ω r
Ω r
Ω r ,
Teorema fundamental de la hidrostática
Como estudiamos un caso estático, la suma de las fuerzas es nula:
0 ∆ . .
∆ .
∆ . ∆ .
∆∆
En el caso límite:
0

Mariano Calcabrini ‐18‐
Arquimedes
Todo cuerpo sumergido en un fluido recibe un empuje de abajo hacia arriba igual al peso del
volumen de fluido desplazado (fuente: la gallinita dijo eureka)
Pascal
En un fluido la presión se transmite a todas las partículas del fluido y a las paredes del
recipiente que lo contiene. Esto tiene aplicaciones interesantes como: la prensa hidráulica.
Torricelli
Tubo de Torricelli, la medición se basa en el teorema fundamental de la hidrostática.
Enunció un teorema (wiki) que no se ve en clase pero se aplica en los problemas:
La velocidad de un líquido en una vasija abierta, por un orificio, es la que tendría un cuerpo
cualquiera, cayendo libremente en el vacío desde el nivel del líquido hasta el centro de
gravedad del orificio.
Tubos de Venturi y Pitot
Venturi: permite medir la diferencia de presiones, que viene dada por un cambio en la velocidad del
fluido. Hay que plantear: Bernoulli, conservación del caudal e igular las presiones en el tubo en U.
Pitot: Permite medir la velocidad de un fluido planteando Bernoulli.

Mariano Calcabrini ‐19‐
Meniscos y capilaridad
Θ es el ángulo de contacto, si la superficie se dice hidrofóbica, y no se moja (1). Si
la superficie se dice hidrofílica y se moja (2).
Si la superficie se moja se forma un menisco, y la deformación en la superficie viene dada por
una fuerza. Esta fuerza no puede ser racionalizada como una fuerza discreta porque se da en
todos los puntos del perímetro, por eso se define una tensión:
2
Esta tensión da lugar al fenómeno de capilaridad.
Debido a esta tensión aparece una presión complementaria.
Por el teorema fundamental de la hidrostática:
. cos . 2
1.2 . cos

Mariano Calcabrini ‐20‐
La altura que alcanza un líquido dentro de un tubo capilar es inversamente proporcional al
radio del tubo.
Hidrodinámica
Nosotros estudiamos fluidos bajo las siguientes suposiciones:
1‐ Flujo estacionario: para un punto determinado del fluido la velocidad no varía con el
tiempo
2‐ Fluido irrrotacional: en todo punto del fluido la velocidad angular es nula
3‐ Fluido incompresible: ∆ 0. Sirve cuando se estudian líquidos, o gases en condiciones isocóricas o isobáricas (trabajo reversible). Se considera que si la
velocidad del gas es 0,3 se puede aplicar la suposición.
4‐ Fluido no viscoso. La viscosidad introduce fuerzas tangentes al flujo y disipa energía
(no se puede aplicar Bernoulli)
Líneas de corriente
Las líneas de corrientes son las familias de curvas que son instantáneamente tangentes al
vector velocidad en cada punto del fluido.
((streaklines son las líneas que dan cuenta de la trayectoria de una partícula en el fluido))
¿Es posible que dos líneas de corriente se intersecten? No, por definición las L.C. son
tangentes a la velocidad, si se intersectan en el punto P, entonces no está definida.
Conservación del caudal
Como las líneas de corriente no se intersectan, no entran ni salen del tubo, entonces la masa
permanece constante.
∆ . . ∆ . .
. . á

Mariano Calcabrini ‐21‐
Si se traba con fluidos incompresibles, la densidad es constante y se utiliza el caudal
volumétrico:
. é
Teorema de Bernoulli
El Teorema de Bernoulli plantea conservación de la energía para fluidos sobre una misma
línea de corriente.
∆12∆ .
∆ . .
. . . ∆ .∆
. . . ∆ .∆
12∆ . ∆ . . .
∆.∆
Reordenando los términos:
2.
2
¿Por qué vuela un avión?

Mariano Calcabrini ‐22‐
→
Por Bernoulli:
2 2
2
0
Entonces el ala experimenta una fuerza neta hacia arriba.
Viscosidad y fluidos turbulentos
. .
La fuerza viscosa genera un gradiente de velocidades en un tubo se sección S.
Se estudia el flujo laminar como un flujo de Couette, donde hay dos platos y el superior se
mueve arrastrando al fluido.
La fuerza que aparece es proporcional a la sección y a la velocidad del plato superior, e
inversamente proporcional al diámetro del tubo.
. .
Stokes:
6

Mariano Calcabrini ‐23‐
La velocidad límite para una esfera que cae en un líquido sale de plantear Newton (peso
empuje y fricción) y considerar que cuando se alcanza la velocidad límite la aceleración es
nula.
Fluidos turbulentos
Los fluidos turbulentos se pueden estudiar con el modelo experimental de Reynolds.
. .
Si 2000
3000 é
é
Reflexión
En el año 200AC Hero estudió el fenómeno de reflexión. ¿Qué camino hace la luz desde un
objeto hasta el ojo cuando la imagen se ve en un reflejo? …el de menor distancia.
Si la luz se refleja en el punto A, la distancia que recorre la luz es .
Nosotros sabemos que al reflejarse una imagen en un espejo plano la vemos al doble de la
distancia que hay entre nosotros y el espejo, entonces los triángulos y ’ son
congruentes.
Entonces: ′ Por la desigualdad triangular ′ ′, entonces la menor
distancia se logra cuando P, A y S’ están alineados.
Mariano Calcabrini ‐24‐
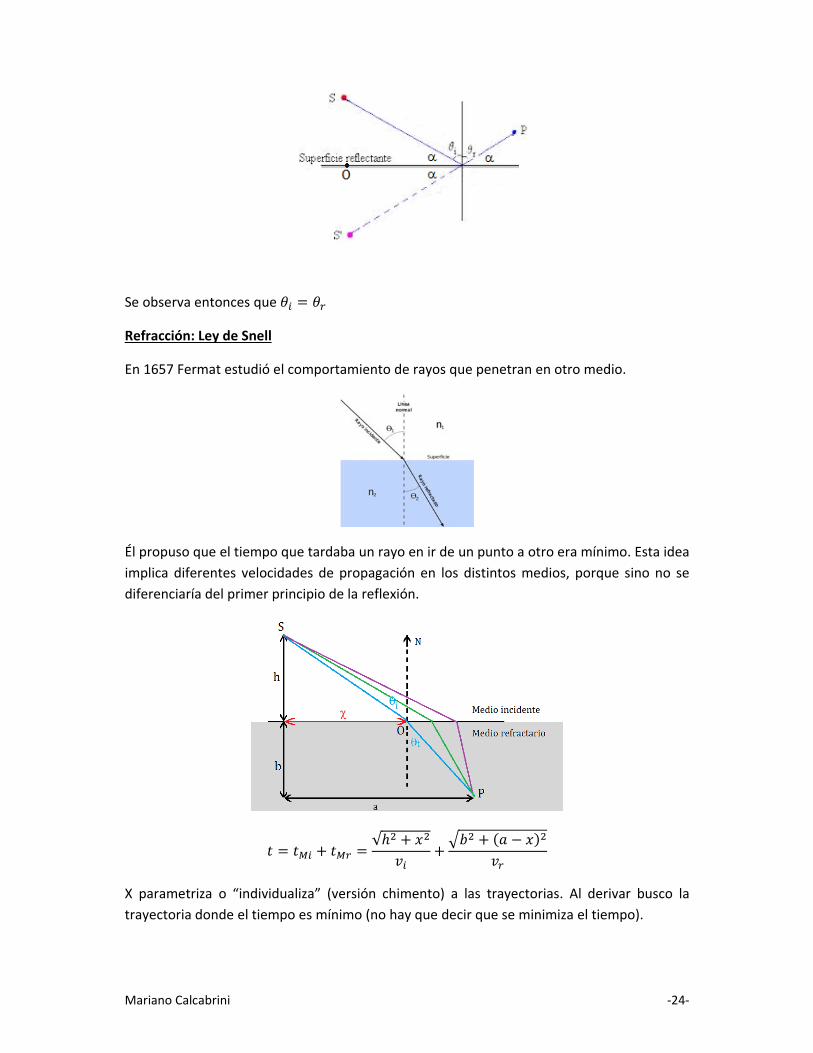
Se observa entonces que
Refracción: Ley de Snell
En 1657 Fermat estudió el comportamiento de rayos que penetran en otro medio.
Él propuso que el tiempo que tardaba un rayo en ir de un punto a otro era mínimo. Esta idea
implica diferentes velocidades de propagación en los distintos medios, porque sino no se
diferenciaría del primer principio de la reflexión.
√
X parametriza o “individualiza” (versión chimento) a las trayectorias. Al derivar busco la
trayectoria donde el tiempo es mínimo (no hay que decir que se minimiza el tiempo).

Mariano Calcabrini ‐25‐
Como busco la trayectoria de tiempo mínimo, 0.
012
.2
√
12
.2
1.√
1.
1.
1.
, í ó
Entonces se puede reescribir la igualdad como:
. .
Principio de Fermat
El camino óptico la longitud del camino que recorrería la luz en el vacío en el tiempo
transcurrido en ir desde el punto A hasta el punto B.
. .
En la refracción se minimiza el tiempo transcurrido, entonces se minimiza también el camino
óptico.
En la reflexión, n=cte, entonces al minimizar la distancia, también se minimiza el camino
óptico.
En ninguno de los casos fue necesario verificar que era un mínimo, por ende se habla de
extremar el camino óptico.
El Principio de Fermat establece que al ir un rayo de luz del punto al punto , debe
recorrer una longitud de camino óptico, tal que la misma sea estacionara con respecto a
variaciones del mismo ( 0).
Si el cambio de índice de refracción se da por un cambio gradual el mismo medio, como por
ejemplo un gradiente de temperaturas, entonces la luz se desvía dando lugar a lo que
conocemos como “espejismos”.

Mariano Calcabrini ‐26‐
Reflexión total interna
Si un rayo incide en un medio de menor índice de refracción, al aumentar el ángulo de
incidencia, el ángulo de reflexión aumenta cada vez más hasta que sale perpendicular a la
normal, tangente a la superficie. El ángulo de incidencia que logra esto se llama ángulo crítico.
Los rayos que inciden con un ángulo mayor que el ángulo crítico no son transmitidos, y toda
la luz se refleja. Esto se conoce como fenómeno de reflexión total interna y está presente en
iluminación de piletas y en los cables de fibra óptica.

Mariano Calcabrini ‐27‐
Dioptras
Una dioptra es un aparato óptico de forma esférica.
. . . .
2 . . cos
2 . . cos
(ϕ es ahora el ángulo de la parametrización, el que “individualiza” las trayectorias)
. .0 .
12 .1. 2 . . .
12.1. 2 . .
. . . .
. 1 . 1
1 . .
Bajo la aproximación paraxial, los ángulos de incidencia son muy pequeños, pegan casi en el
centro de la dioptra y entonces ~ ~ .
El FOCO OBJETO es el punto donde, de encontrarse el objeto, la imagen se formaría en el
infinito, entonces:
0
.
El FOCO IMAGEN es el punto donde se forma una imagen si los rayos provienen del infinito:

Mariano Calcabrini ‐28‐
0
.
Vemos que para una dioptra, foco objeto y foco imagen difieren.
Lentes delgadas
Para estudiar lentes delgadas asumimos que la imagen de la primera dioptra es el objeto de
la segunda.
1‐
1′′
1
2‐
S’’ es la posición de la imagen de la primera dioptra, como se encuentra en el espacio imagen
de la segunda, ‐S’’ es la posición del objeto de la segunda dioptra.
′′1 1
Sumando las expresiones anteriores:
1 11
1 1
En este caso los focos coinciden:
.11

Mariano Calcabrini ‐29‐
Aumentos
Hay dos tipos de aumentos, un aumento transversal, que en todos los casos es , y
se puede calcular a partir de triángulos semejantes.
Se define el aumento angular que produce el sistema óptico para el observador como el
cociente entre el ángulo que ocupa en el campo de visión la imagen y el ángulo que ocupa el
objeto visto sin el sistema óptico.
≅tantan
Xpp es la distancia focal normal del ojo, el valor estándar para Xpp es 10in=254mm.
Lupas, microscopios y telescopios
Una lupa consiste en una lente que tiene un aumento angular, al llegar con otro ángulo al ojo,
la imagen que se forma sobre la retina es más grande, para que funcione el objeto debe
encontrarse en el foco, sino el aumento sería transversal (en la práctica no se ve nada por las
aberraciones cromáticas).
Un microscopio está compuesto por dos lentes, un objetivo, que es una lente delgada
convergente, y un ocular, que funciona como una lupa. Es importante que la imagen del
objetivo se forme en el foco del ocular.
Microscopio
El telescopio galileano o refractario consiste en una gran lente convergente que junta los
rayos – que provienen del infinito‐ en el foco imagen, luego un ocular agranda la imagen
formada. En estos aparatos, el foco objeto del ocular debe coincidir con el foco imagen del
objetivo.

Mariano Calcabrini ‐30‐
Telescopio refractor
El gran problema de estos microscopios es la fabricación del objetivo, deben ser lentes muy
grandes y sin imperfecciones y son tan pesadas que se rompen fácilmente…
Un telescopio newtoniano o reflector consiste en un único espejo cóncavo, convergente que
concentra los rayos casi paralelos en su foco. La imagen formada se puede ver directamente
o puede ser reflejada en un pequeño espejo plano.
Telescopio reflector