formula air - nch83.net
TRANSCRIPT

B03502012 陳昱臻
B03502100 徐子秦
B03502115 陳毅嘉
B03502125 倪嘉宏
B00502141 陳致嘉
2017/05/05
Formula Air 105學年度機械工程實務氣動車期末報告

1
目錄
Part I.緒論 ........................................................................................................................................... 2
Part II.功能需求 ................................................................................................................................ 3
Part III.設計概念及布置................................................................................................................ 5
車輛設計 ................................................................................................................................ 5
控制系統設計 ...................................................................................................................... 13
Part IV.設計分析 ............................................................................................................................ 19
葉片攻角分析 ...................................................................................................................... 19
風場分析 .............................................................................................................................. 21
摩擦力分析 .......................................................................................................................... 22
扇葉推進力分析 .................................................................................................................. 23
扇葉推進力實驗 .................................................................................................................. 24
車輛動態分析 ...................................................................................................................... 25
Part V.測試記錄 .............................................................................................................................. 26
Part VI.工作進度與分工 .............................................................................................................. 29
Part VII.心得與建議 ..................................................................................................................... 31
附錄一、整體架構 .......................................................................................................................... 35
附錄二、3D printer 相關數據 ................................................................................................... 36
附錄三、控制系統細部說明 ....................................................................................................... 37
附錄四、App 相關檔案說明 ...................................................................................................... 40
附錄五、BOM 表 ........................................................................................................................... 41
附錄六、工程圖 .............................................................................................................................. 43

2
Part I 緒論
本課程主要目標是在訓練我們將所學的各項專業知識,包括設計、分析、製
造等工程知識與技術加以整合,再加上創新點子並付諸實踐,培養出身為一位專
業工程師所需具備的經驗以及處理問題的能力。此實務課程以組為單位,製造一
台尺寸在限定規格範圍(21.0cm×29.7cm)內之自動循跡風動車、無線遙控車。
初步討論結果如下:機電系統以 Arduino 為主體大致架構確定,風扇驅動以
L298N 直流馬達控制器操作風扇直流馬達,並以三顆 18650 電池作為動力來源,
以後若需要調整電壓強度再搭配電晶體使用;車體轉向以伺服馬達控制,而轉向
機構以四連桿控制前輪轉向;循跡系統透過三組安裝於車頭的紅外線感測器進行
判斷,並以 PID 或 If-Else 涵式控制伺服馬達轉向。
初期的構想在實踐上也遭遇許多瓶頸,例如車體支撐性不足、轉向不足、紅
外線感測器不靈敏等大大小小無數的問題。期中測試後我們亦在短時間內設計了
新的轉向機構、保險桿、改四輪設計為三輪搭配兩輔助輪,以面對期末驗收和競
賽。透過組員們無數次的討論、設計修正、實品製作以及測試,才有了最終版本
的風動車,使我們順利完成循跡路線,並在競賽上獲得不錯的成績。
※設計特點
1.全車 3D 列印,一體成型,成品輕量化
2.模組化的配件設計,短時間內改裝成循跡/競速車種
3.全車配件以螺絲組裝,拆卸便利,重複利用率高
4.自製輪框內含軸承,車輪滾動順暢無礙
5.車體高速過彎頃角極小(±0.2°),幾乎無翻覆可能性

3
Part II 功能需求
一、循跡配置
以自動循跡的方式,在指定的賽道上通過長為 500 公分的直線路徑,再經過
半徑為 180 公分的 90 度彎道,停止於 120 公分長度內的煞車區(期中測試),再
分別經過 135 度及 150 度急轉彎,最後越過高為 1 公分的障礙物,再通過終點(期
末驗收)。相關路線配置圖如下。
圖一、循跡路線
二、競賽配置
在競速賽道(如下圖)與其他組氣動車競速。賽程從四取三的初賽,到三取二
的複賽,再到四取一的淘汰賽,最後進入四強至決賽。
圖二、期末競賽賽道

4
三、考量因素
(一)推進
以風力驅動,故馬達轉速搭配扇葉設計需推動車子前進,又必須確保循跡系
統有足夠反應時間得以校正路線。
(二)轉向
需設計出轉向機構進行轉向,以應付大、小彎道,及競賽高速下過彎。
(三)剎車
循跡系統需能偵測煞車區塊進行煞車反應。
(四)自動循跡
需設計紅外線感測器之自動循跡模組
(五)無線遙控
需設計藍芽無線遙控模組
(六)車體的穩定性
車體會加上鋁箔包(車手)負重,為了不在行進中顛覆,需控制車體總質心落
在車底範圍內,並且做好各部件配重。
(七)材料及零件的選擇
設計中最重要的莫過於材料的選用。針對不同部件的功用及製造方法,個別
評估以及選用符合強度、重量和成本的材料。

5
Part III 設計概念與布置
圖三、系統架構
一、車輛設計
(一)設計特色
1.車體一體成型
(1)工圖簡單
直接畫 3D 模型,不需要轉成平面再進行雷射切割與組裝,非常省時。
(2)工件數量少,減少誤差累積性
誤差修正具有方向性,根據上學期機械工程設計的慘痛經驗,很容易在做
二次加工修正誤差時,修過頭或是產生軸心偏移,就得全部重做。這次一
體成形能大幅減少工件數量,誤差也會相對減少,省下許多時間。
(3)部件採用螺絲組裝穩定性高,拆裝方便,工件利用率上升
車身主要結構由 12 根螺絲組裝,每個都可以獨立拆卸和重複利用。從期
中的 4 輪車,變成期末 3 輪,只有變更前輪轉向機構,全車 8 成零件皆重
複利用。相較於部件膠合連接的方式,本組更換零件時,不會損壞到零件
表面,亦無需重新製作工件。
2.模組化車底+配件設計
提升工件利用率,可以任意變更成期中 4 輪或是期末 3 輪模式
系統架構
車體機構
車體
車架
輪框
保險桿 轉向機構
風扇
扇葉
馬達架
控制系統
循跡模組
藍芽模組

6
這是我們最自豪的設計:可在 5 分鐘內不受場地限制,直接由 4 輪車變成 3
輪車。全車更動處只有前輪的懸吊共 2 顆螺絲(下圖紅色圈圈處)
3.Atom 3D 列印優勢
(1)開發效率高
自有 3D printer 情況下,任何設計更新皆隨時有專人負責列印。如此一條
龍式的生產線,設計翻新速度平均在 12 小時之內,遠快於其他組至少 1
天的更新時間,具有非常大的優勢。
※3D printer 規格及列印參數於附錄一中
(2)省略兩次加工去除誤差程序,成品可直接組裝
在 creo 繪製時,考量進去,成品一印好就可以測試,甚至可達扣件水準
(3)強度和重量比符合需求
車子總重輕量化,減少風扇輸出功率=減少電量消耗,並且減少越過障礙
物所需要的推力(速度)。車子重量和他組實際比較結果輕約 200 公克,大
約是一個車手的重量。在生醫場地實測時,亦發現風扇運轉時的聲音頻率
遠低於其他組別,但前進速度不比他組慢。

7
(二)設計與製造
1.車體
(1)車架
分為車架及車底板兩部分,機構上參照車子採用雙層設計。前後共設計
兩款車體結構(如下圖四、五),第一版須將各部位拼接並以螺絲鎖緊,第二
版本的車架為一體成型,擁有較佳的支撐力。車架上方和車底板由螺絲在四
個角落連接固定,中間夾層(如圖六)可容納電池架及轉向機構。車架高度以
前方放置 IR 感測器電路板高度為主。
圖四、第一版車架
圖五、第二版車架 圖六、中間夾層
在車體製造上考量 3 種材料:壓克力板、密集板及 PLA(3D 列印)。由
於車子透過風力驅動,車體重量不可過重,但仍須有一定強度承受外力。最
終決定使用強度較強的密集板作為車底板材料,承受大部分外力;以較輕的
PLA 線材當作車架材料,並在軸的部分採用倒角處理,用以承受正向力。
圖七、第一版車架 圖八、第二版車架

8
(2)輪框
第一版輪框直接嵌入輪軸(如圖九),但車子行進時輪胎和軸之間的磨擦
力過大,造成風扇馬達的負載。故第二版設計為左右各 2 個半圓柱,於印製
圖中放入軸承,再將鋼軸插入輪軸(如圖十一)。3D 列印中途停機放軸承,
為技術困難點之一(如圖十)。
圖九、第一版輪框
圖十、軸承放置示意 圖十一、第二版輪框
(3)保險桿
最主要功能為保護車子前方的感測器,且要符合車底雙層設計。因其目
的為防撞,不考慮以黏著的方式固定在車底上,採用共用車底和車體前 2
顆螺絲方式固定。從側面看為一個側 V 字型,其一為考量萬一車子空間不
時,上方可以做為延升空間;其二是受撞擊時,可以分散撞擊力道到車底,
而不是集中在螺絲處,也保護車體前方 IR 感測器。
圖十二、保險桿

9
2.轉向機構
第一版設計是四連桿,其中一個桿件為齒條,以伺服馬達驅動齒輪轉動。但
四連桿運動軌跡具有弧度非線性,造成轉向失敗。
第二版採用阿克曼轉向機構,以連動桿驅動前兩輪轉向帶動車子轉向。
圖十三、阿克曼轉向機構 圖十四、第二版轉向機構
優點─轉向車身穩定
車子本身重心非常低,再搭配 4 輪穩定著地,所以轉彎時車身分常穩定不會
晃動,車子傾斜角度非常小
缺點
(1)需抉擇於克服磨擦力或車體穩定性
連桿之間的連接以螺絲螺帽與墊片組裝,連桿要能相對滑動,因此螺絲螺
帽不能鎖太緊,但這又會導致螺絲隨著轉向次數增加而越轉越鬆。
(2)反應時間延長
兩桿之間的螺絲鬆掉後,轉向時會先空轉一小段才真正轉向,導致整體反
應時間延遲,造成車子遇彎道無法及時反應。
(3)轉彎半徑過大
受限機構設計,有最大轉彎幅度,雖足以應付期中測試前半段的轉向,但
期末驗收的 2 個髮夾彎,就無法處理。
第三版設計是期中測試後,將轉向機構改成以伺服馬達直接轉動。類似機車
轉動輪子的方法,只是方向盤由伺服馬達控制。新設計成效非常好。

10
圖十五、第三版轉向機構
優點
(1)反應迅速
從 IR 感測器測得轉彎路徑到車體轉向完成,所費時間縮短非常多,代表
車速能再提升而不影響轉彎成功率
(2)轉向幅度大
不受機構限制,可大幅度轉向,因而能再提高車速,順利越過期末障礙物。
隱藏優點在於車子的控制程式可以簡化,不需要額外撰寫加速程式。
缺點─需要裝設前輔助輪
轉向機構直接裝在伺服馬達上,導致車身不平穩,轉彎傾角增加,而有過彎
翻車的疑慮。因此需加裝輔助輪,限制其傾斜角度。
3.風扇
(1)扇葉
由於風力是車體主要動力來源,除了要考量馬達功率之外,扇葉是相當
關鍵的部份。參考馬達建議配備之風扇葉面為 2 葉式直徑約為 20mm。使用
此風扇能提供足夠動進力推動氣動車。我們最初所設計的扇葉,扇葉數量可
分為 3 葉、4 葉、7 葉,而直徑範圍從 10cm 到 20cm 都有。經過葉片攻角分
析、風場分析和無數次的 trial and error,最終設定為 3 葉式、直徑 150mm 的
風扇(如圖十七)。

11
圖十六、風扇印製 圖十七、風扇
為了確保風扇運轉時,即便有任何突發狀況導致扇葉損壞、爆裂等情形,
而不至於傷及旁人,我們設計了環形風扇保護罩,將整個風扇環繞在內,使
其能在運作不受阻礙下,達到優良的保護機制。
圖十八、風扇保護罩
2.馬達架
用以支撐馬達的重量、馬達轉動扇葉所造成的力,以及推動車體的力等
等,一開始所設計的馬達架因其結構尚無法支撐,馬達運作時,整架風扇會
有大幅度的震盪。又設計了另一款馬達架,克服馬達轉動時所產生的力矩。
圖十九、第一版馬達架 圖二十、第二版馬達架

12
(三)尺寸量測驗證
各部件之尺寸差皆標註在附錄五工程圖上。從製造結果看來各部件的公差皆
在 0.1~0.4mm 之間,符合 3D 列印機的額定公差。由於多數部件為一體成形,並
無零件相互配合度的問題。唯獨在螺絲孔的部分需以筆鑽進行擴孔,修正圓孔直
徑,使之能和公制螺絲緊配。
(四) 3D printer 問題克服
1.誤差問題
這是最嚴重的部分,會直接影響我們零件品質和加工時間
影響誤差有以下原因:
(1)機構組裝誤差
A.問題來源
組裝時未確實鎖緊機構,或是列印長時間後螺絲,皮帶等鬆脫
B.解決方式
重新檢查每個有相對運動的零件,eg:止付輪,同步輪,球頭螺絲……
等,並且以調音器去調整皮帶鬆緊。
但這些只能解決平面(X 軸和 Y 軸誤差),Z 軸誤差最大影響在於切片
軟體 Cura 所設定的列印層高,可以用較小層高來降低誤差影響。
(2)列印共振誤差
A.問題來源
3DP 列印小物件時,噴嘴會進行類似簡諧運動來填平工件。面積越小,
噴嘴移動速度越快,3DP 機台晃動越大,越容易造成誤差
B.解決方式
降低噴嘴移動速度和加速度,或是改變物件擺設方式,避免切片方向
會經過較小的工件截面積
(3)滑軌震動誤差
A.問題來源
3D printer 數據
型號 Atom 2.5 EX(Delta)
額定公差
X 軸 0.1~0.2mm
Y 軸 0.3~0.4mm
Z 軸 0.1mm

13
本 Delta 採用滑軌搭配皮帶方式讓噴嘴移動,當滑軌缺乏潤滑時,會
導致在移動過程中,發出聲響,並且影響 Z 軸精準度
B.解決方式
徹底把三軸的滑軌擦拭乾淨,並且重新上油保養。
2.工件品質問題
這部分主要是會影響物件的表面精細程度,和機械強度,耐用度等
影響品質有以下原因:
(1)物件表面有牽絲現象發生
A.問題來源
最主要來源在於 PLA 線材受潮了,另外有一小部分原因在於進料速
度過快,導致列印時溢料,汙染噴嘴口附近,在移動時產生牽絲現象
B.解決方式
PLA 線才要做好防潮措施,且可經由切片軟體 Cura 調整進料速率和
回抽等設定
(2)物件表面有疙瘩產生
A.問題來源
列印噴嘴溫度不穩定,或是進料不順利
B.解決方式
列印時,不讓機器受電風扇及冷氣直吹,寒流來襲時,會關窗戶列印。
並且定時清理進料的鐵氟龍管,防受灰塵影響,機器未使用時,用塑
膠袋套起來防塵
(3)物件 Z 軸出現一圈圈的紋路
A.問題來源
Cura 本身切片軟體噴嘴移動路徑所造成,或是因為機構誤差所造成
B.解決方式
機構誤差由第一部分所提的方式解決,改變 Cura 噴嘴移動路徑,最
簡單方式就多個物件一起列印,或是使用別種切片軟體,eg: KISSlicer

14
二、控制系統設計
(一)循跡模組
1.控制系統設計架構
表一、機電部件功能
System Part function
IR sensor 感測循跡訊號,回傳給 Ariduino 做分析
Arduino
UNO
使用自撰 Controller 控制軟體,接收 IR 感測訊號,根據路
況對無刷馬達電變和伺服馬達做溝通,以達成循跡行車的
功能
Brushless
motor ESC
透過 Servo.h 函式庫下達訊號,經電變控制風扇轉動及停
止
Servo Motor 接收來自 Arduino 的指令旋轉至固定角度,控制車子轉向
2.控制程式流程
車體通電後會進入待機模式,一但接收到開機訊號便啟動無刷馬達進入
循跡模式。設計使用紅外線感測器(IR)偵測地面黑線,藉由數位測值(0 或 1)
判別車體是否行走在正確路線上,若有偏移則透過伺服馬達控制車輪旋轉角
度,修正行進方向。詳細的各部件功能說明請參閱附錄三。

15
(二)藍芽模組
1.開發流程
使用 cordovad 框架進行藍芽無線遙控 app 的編寫。(相關檔案說明於附錄四)
Cordova 框架(app) 網頁語言編寫的
App 介面
jQuery Mobile 編
寫系統功能
外掛模組
(ex: app 功能)

16
2.遙控 APP 介面
(1)連線介面
挑選與系統配對好的藍芽裝置連線後,即可進入操控介面。
圖二十二、app 連線介面
(2)操控介面
A. SafeBar 速度保險桿,打開鎖死馬達
B. Middle 轉向保險桿,打開鎖死轉向
C. Speed 控制轉速
D. Direction 控制轉向(橫屏方向鍵以左右按鈕操控)
E. Disconnect 中斷連線

17
圖二十三、app 操控介面(直屏)
(三)問題克服
1.IR sensor
循跡模式下時常因 IR 靈敏度問題,或車體行進中上下晃動導致 IR 離地距
離改變,未能順利偵測地面黑線,而無法及時做出反饋,將車體導正至預
定路徑上。
(1)解決方案
A.依場地顏色調整靈敏度
循跡路線為黑色,場地為灰色,故調整 IR 靈敏度使之在偵測到黑線
時才回傳 1,偵測到比黑色淺的顏色皆回傳 0。
B.增加 IR sensor 數量
從原始 3 顆 IR 增加左右外側 2 顆感測器,一共使用 5 顆
C.固定 IR 至車架上
(2)成效
大幅改善原本偵測效果不佳情形
2.克服 135 度及 150 度大轉彎
彎道非常陡,故系統收到 IR 回傳值後會發出+-60 的訊號給伺服馬達做大
轉彎,但馬達反應速度跟不上車子前進速度而使車體衝出彎道。此時 IR
會回傳 0,導致伺服馬達接收很多 0 訊號最後直走。
(1)解決方案

18
A.遵循前決策
若前次決策為大轉彎後,五個 IR 都沒有再收到訊號時,遵循前次決
策繼續大轉彎。因此若一直沒有收到訊號,此決策會遞迴延續,直到
再次收到 1 訊號進行路線導正回直線或小轉彎。
B.大彎後 delay
在大轉彎後給予系統 time delay (ex.300ms),讓伺服馬達有時間完成
大轉彎。
(2)成效
A.不只令車子可以度過大轉彎,而且大幅度提高接受的 Damping程度。
B.車子可以平安渡過大轉彎,但會增加平常誤觸大轉彎頻率
⇒最終採用方案 a
3.克服啟動時地面靜摩擦力
希望車子啟動時能克服地面靜摩擦力,行進時維持高穩定狀態。
(1)解決方案-二階段加速功能
系統在開始 2000ms 內會使用 init_power 加速,時間過後下降為 power
※可調系統參數:init_power、power
(2)成效
效果卓越的功能,車子能快速啟動,並穩定行進
4.越過障礙物
由於車底低底盤設計,需更大動能越過障礙物,但同時維持車體穩定度
(1)解決方案-自動分段加速功能
此為較複雜的功能。系統在偵測到 limit的時間內都收到相同 IR訊號時,
代表跑得很穩定或是停留在原地不動(遇障礙物),開始以秒為單位提升
Acc_rate(加速),直到 IR 的偵測訊號改變再調回原始 power(回復原速)。
考慮到避免一加速就改變訊號的情況,確保加速至少持續 protect_val
秒的時間。
※可調系統參數:limit、Acc_rate、protect_val
(2)成效
大幅增加越過障礙物的成功率,但車子仍有微小機率與障礙物卡死,即
使加速到最高仍然無法脫離,甚至會造成馬達溫度過高。故最後設定
160 為調速極限。並不列入可調控的參數內。

19
Part IV. 設計分析
一、葉片攻角分析
使用 Qblade 軟體進行扇葉分析,設定雷諾數為 1000000,分析攻角從-20°到 10°,
一次增量為 2.5°,利用 XFOIL Direct Analysis 功能建立流過扇葉的阻力係數、升
力系數和攻角關係圖。
圖二十四、參數設定
升力係數 Cl 和攻角 α 關係圖可以找出在需求抬升力對應的適合攻角度數,便可
建立出扇葉曲線。由 Cl -alpha、Cl /Cd –alpha、以及 Cl - Cd關係圖,找出最佳的
攻角 α 為 8°
圖二十五、Cl –alpha 圖二十六、Cl /Cd–alpha
20
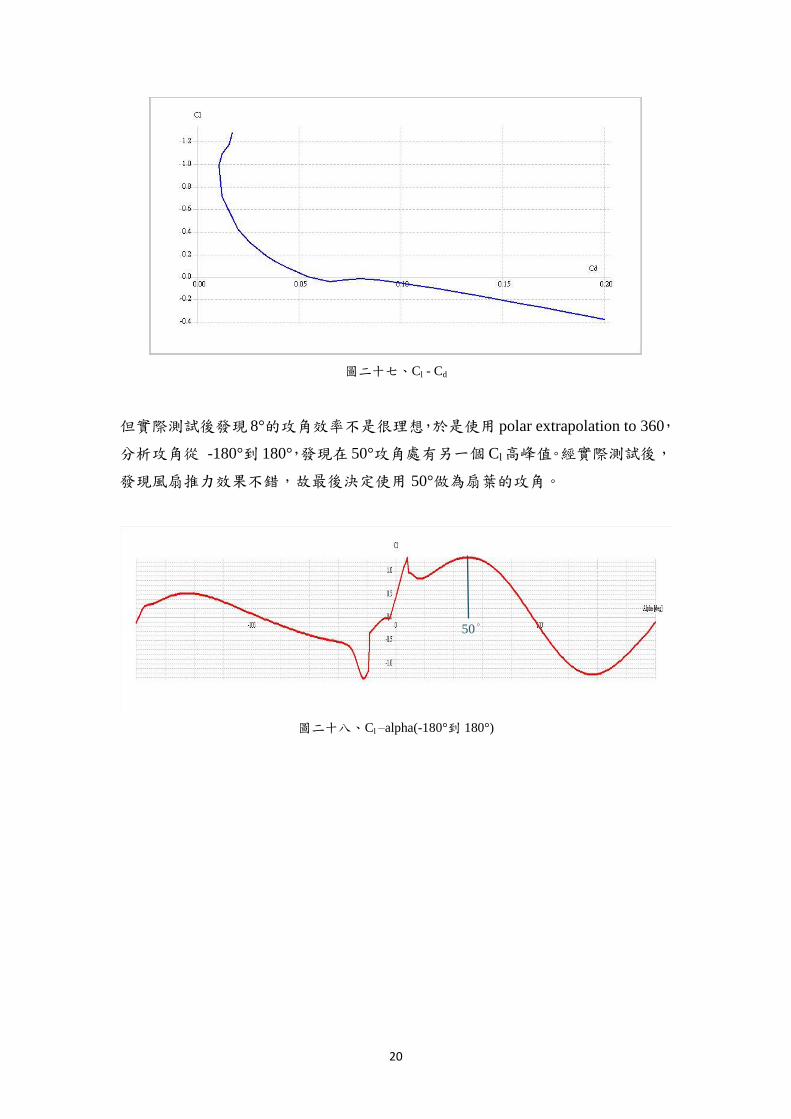
圖二十七、Cl - Cd
但實際測試後發現 8°的攻角效率不是很理想,於是使用 polar extrapolation to 360,
分析攻角從 -180°到 180°,發現在 50°攻角處有另一個Cl高峰值。經實際測試後,
發現風扇推力效果不錯,故最後決定使用 50°做為扇葉的攻角。
圖二十八、Cl –alpha(-180°到 180°)
50°

21
二、風場分析
使用 Qblade 的 QLLT-Simulation 模擬扇葉轉動後流場吹動,及扇葉受力情形。
圖二十九、參數設定
由分析結果可看出扇葉的受力由內而外增加,原始扇葉設計的強度足以應付此力
度,但在轉軸與扇葉連接的處需要加強厚度,以免在旋轉時產生扇葉與轉軸分離
的情形。新版本風扇有針對此項分析結果進行修正。
圖三十、扇葉流場分析

22
三、摩擦力分析實驗
1.實驗目的
量測地面與車體間的最大靜摩擦力,及地面靜摩擦係數
2.實驗設備
氣動車及彈簧秤
3.實驗過程
將氣動車放置於生醫大樓地面,初始為靜止狀態。下壓秤直到洽使車體移動,
此時秤的讀值,即為車體與地面的最大靜摩擦力。
圖三十一、摩擦力量測過程 圖三十二、洽推動時讀值
4.實驗結果
磅秤初始值為 20g,經實驗得最大靜摩擦力
𝑓𝑚𝑎𝑥 = 80 − 20 = 60(𝑔) = 60 × 9.8 = 0.5886(𝑁)
再由公式求得地面靜摩擦係數
𝜇 =𝑓𝑚𝑎𝑥
𝑁=𝑓𝑚𝑎𝑥
𝑚𝑔=
0.5886
1.26 × 9.8= 0.0476

23
四、扇葉推進力分析
風扇扇葉轉動時所產生的力(F)與扇葉面積(A)、空氣密度(ρ)、轉動速度(V)和攻
角(α)的關係為:
𝐹
ρA𝑉2= 𝑓(𝑅𝑛, α)
其中 F 包含兩個部份 FL和 FD
F = 𝐹𝐿 + 𝐹𝐷
𝐹𝐿 =1
2𝐶𝑙ρ𝐴𝑏𝑙𝑎𝑑𝑒𝑉
2
𝐹𝐷 =1
2𝐶𝑑ρ𝐴𝑏𝑙𝑎𝑑𝑒𝑉
2
Cl為升力係數,在攻角為 50°時約為 1.25,
Cd為阻力係數,在攻角為 50°時約為 1.15,
ρ 為空氣密度,在 27°1atm 下約為 1.293 kg/m3
Ablade為扇葉有效面積,約為 1566.12mm2=1566.12×10-6m
3
V 為扇葉速度 rω,ω 為轉速,在最大轉速下,ω= 21640 rpm = 2266.136 (rad/s)
以每一小塊的面積 dA 所提供的力 dF
dF =1
2𝐶𝜌(𝑟𝜔)2𝑑𝐴
又
dA =𝐴𝑏𝑙𝑎𝑑𝑒𝑟2 − 𝑟1
𝑑𝑟
從有受風處 r1 =5mm 積分到扇緣 r2 = 75mm,得到單片扇葉的力(F)為:
dF =1
2Cρ
𝐴𝑏𝑙𝑎𝑑𝑒𝑟2 − 𝑟1
(𝑟𝜔)2𝑑𝑟
∫dF =1
2Cρ
𝐴𝑏𝑙𝑎𝑑𝑒𝑟2 − 𝑟1
∫ (𝑟𝜔)2𝑑𝑟𝑟2
𝑟1
=1
2Cρ
𝐴𝑏𝑙𝑎𝑑𝑒𝑟2 − 𝑟1
×1
3𝜔2(𝑟2
3 − 𝑟13)
將上列數值代入後得到最大推力為 3.133N,根據實驗測得車體靜摩擦力
0.5886N(60g),推得扇葉淨推進力為 2.54N。
24
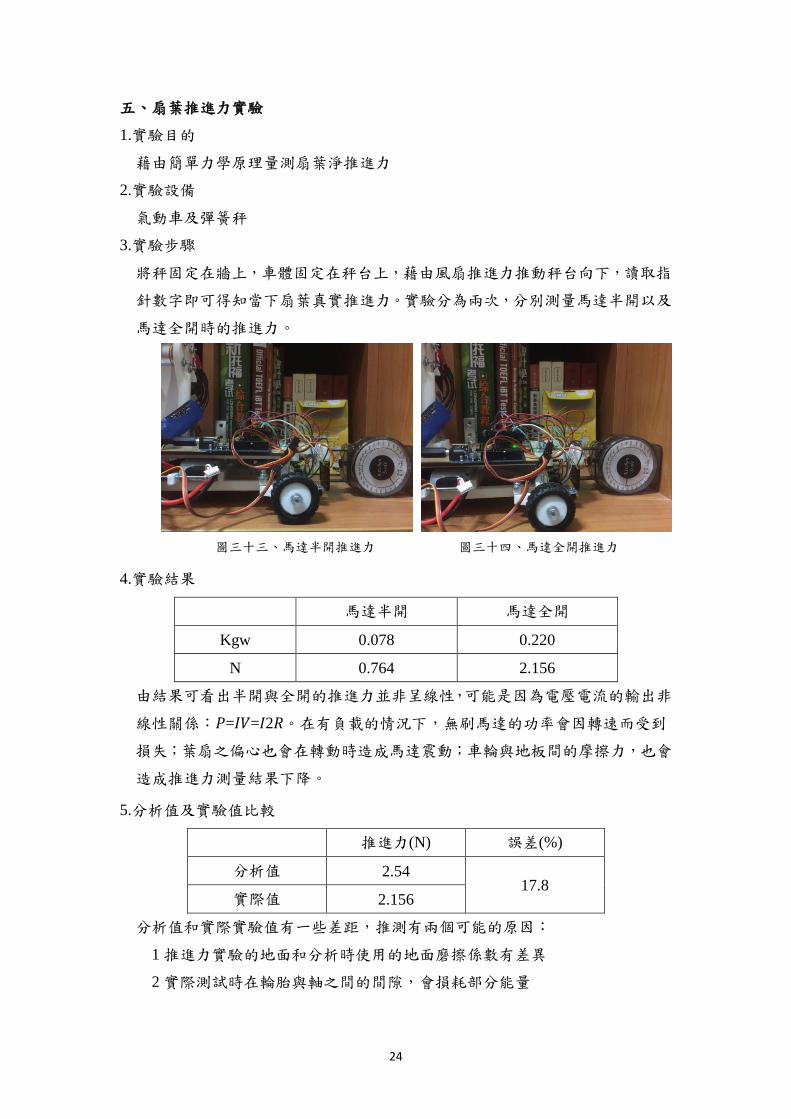
五、扇葉推進力實驗
1.實驗目的
藉由簡單力學原理量測扇葉淨推進力
2.實驗設備
氣動車及彈簧秤
3.實驗步驟
將秤固定在牆上,車體固定在秤台上,藉由風扇推進力推動秤台向下,讀取指
針數字即可得知當下扇葉真實推進力。實驗分為兩次,分別測量馬達半開以及
馬達全開時的推進力。
圖三十三、馬達半開推進力 圖三十四、馬達全開推進力
4.實驗結果
馬達半開 馬達全開
Kgw 0.078 0.220
N 0.764 2.156
由結果可看出半開與全開的推進力並非呈線性,可能是因為電壓電流的輸出非
線性關係:𝑃=𝐼𝑉=𝐼2𝑅。在有負載的情況下,無刷馬達的功率會因轉速而受到
損失;葉扇之偏心也會在轉動時造成馬達震動;車輪與地板間的摩擦力,也會
造成推進力測量結果下降。
5.分析值及實驗值比較
推進力(N) 誤差(%)
分析值 2.54 17.8
實際值 2.156
分析值和實際實驗值有一些差距,推測有兩個可能的原因:
1 推進力實驗的地面和分析時使用的地面磨擦係數有差異
2 實際測試時在輪胎與軸之間的間隙,會損耗部分能量

25
六、車輛動態分析
1.實驗目的
分析氣動車高速行進下的加速度值,及過彎時車輛傾斜情形
2.實驗設備
氣動車及分析 app─Sensor Kinetics
3.實驗步驟
將測試用手機固定在氣動車上,使用 Sensor Kinetics 的加速器功能量測車子沿
跑道直線衝刺時之加速度;使用陀螺儀功能量測車子於跑道過彎時傾斜程度。
圖三十五、實驗裝置示意
4.實驗結果
(1)加速度
從圖 可看出車輛啟動時,x軸加速度約為1.4 m/s2、y軸加速度約為1.5 m/s
2,
z 軸約為 9.4 m/s2。行進時 x、y軸加速度約為 3 m/s
2左右。
(2)過彎頃角
從圖 可看出車體高速過彎時,Roll 值(側頃)和 Pitch 值(前後頃)皆在
±0.2度內;Yaw 值(左右震盪)有稍大的變動,受車手操控方式影響,不影響
車體傾斜。總體而言,車輛具有良好的加速性及過彎穩定性。
圖三十六、三軸加速度 圖三十七、三軸頃角

26
Part V. 測試記錄
日期 記錄 測試結果 修正及改善方式
1 3/3
組出第一版本測試馬達用車
(三顆滑輪+風扣版+直流有
刷馬達+風扇)
1.設計風扇及馬達架
2.設計阿克曼轉向機構
3.設計車體
4.完善控制系統
2 3/10
組出第二版本測試馬達用車
(四顆車輪+列印車架+風扣
板+馬達+風扇)
1 車體空間不足
2 有刷馬達轉速限制
3 風扇大小、葉片數影響
4 車輪阻力
1.修改車體設計
2.修正轉向機構(解決
齒條干涉)
2.研究無刷馬達
3.修改扇葉設計
4.找專用馬達支撐架
3 3/17
1 焊接紅外線感測器電路板
2 無法使電變驅動無刷馬達
3 車體轉向機構仍干涉
1.修正轉向機構(齒條
改凸輪)
2.車底擴充、加強支撐
3.修正馬達架設計
4.控制無刷馬達運轉
4 3/24
※電池短路損毀
1.完成紅外線感測器焊接
2.轉彎時後輪卡死
1.修正車體設計
2.改善輪軸設計
3.購入新電池
5 4/4
1.馬達架被馬達震壞
2.馬達時常轉動不順,並產
生燒焦味
1.購買橡膠墊片防震
2.研究馬達問題(測試
馬達、電變、電池)
3.設計新馬達架
4.一體成形列印車體

27
6 4/21
1.測試車體自動循跡及轉向
功能,轉向有誤
2.自製風扇推力小於市售款
1.修正循跡系統
2.修正風扇設計
7 4/28
【實測一】
※馬達高速運轉下冒煙毀
損,連帶電變損毀
1.保險桿保護狀況良好
2.循線效果待改善
1.購入較低 kv 值直流
無刷馬達
2.購入新電變
3.調整 IR 感測器靈敏
度
8 5/1
【實測二】
直線前行車速不穩定,會左
右晃;轉彎多次駛離賽道。
IR 反應時間及靈敏度、伺服
馬達轉向和直流馬達控速,
三者須互相配合
1.增設兩組 IR 共五
組,藉以改善循跡系統
2.電池架改為一體成形
9 5/3
【實測三】
搭載車手(鋁箔包)順利完成
期中測試區段(直線加速、轉
彎、煞車),最終停止於綠色
煞車區內。
10 5/5 期中測試 順利完成
11 5/19
【實測一】
在急轉彎處伺服馬達反應不
及,無法順利轉過去
1.修正程式對付大彎道
2.車輪改四輪為三輪
12 5/26 【實測二】
車體卡在障礙物無法通過 新增加速程式
13 5/30
【實測三】
多次測試下幾乎都能順利完
成期末驗收路線,

28
14 6/2 期末驗收 不幸在出發後撞到 IR 感測器,導致感測失靈。於測
後發現撞歪的 IR,扳正後在補測時順利通過終點。
15 6/6
【實測一】
藍芽遙控App完成後初次測
試。調速較不便利,轉彎時
車體震盪大
1.修正遙控介面
2.加裝 2 輔助輪穩定過
彎時車身
16 6/7
【實測二】
過彎穩定性佳,希望能在直
線時衝刺
1.新增加速鍵
2.調整左右轉彎鍵為逐
漸遞增轉角
17 6/8 【實測三】
車手操控繞圈順利
18 6/9 期末競速 晉級 16 強止步

29
Part VI. 工作進度與分工
(一)工作進度

30
(二)分工
組員 負責事項
倪嘉宏 扇葉、馬達架設計、配線、組裝、零件採買
徐子秦 程式撰寫及開發(循跡模組及藍芽遙控模組)
陳毅嘉 車體、轉向機構、輪框、保險桿設計、3D 列印
陳致嘉 3D 列印、流場分析、風場分析
陳昱臻 書面報告、海報設計、實驗操作、期末車手

31
Part VII. 心得與建議
一、心得
徐子秦
很高興這一次能負責機電系統和 App 的整合開發,因為這些都是我比較感
興趣的領域,也很感謝組員的信任,並且我們最後都達成目標了!!! 證明這是一
台優秀的機器哈哈,再開發的過程中我把每個機電功能都經過嚴謹的單元測試,
雖然實際上機後仍難免出問題,但是大多數以系統整合的問題為主。比較令人印
象深刻的是....我們的 IR 感測器在持久使用與碰撞過後,似乎常常有異常行為(包
括異常感測和無法感測等等)我們後期常常一天花很久的時間去調整 IR感測器的
靈敏度,可是期末測試當天竟然第一次跑 IR 就撞壞了...並且現場無法維修,等
到補測前才修好,很遺憾期末考沒有拿到滿分...........我真的對自己的系統很有自
信。
另外我們在測試的時候常常碰到一些問題,大家都會去探討問題出在哪裡,
要怎麼克服,有時候硬體懷疑軟體,軟體懷疑硬體,真的很有趣,比較大的硬體
改動應該是從四輪車阿克曼轉向機構改成三輪車吧。因為阿克曼對伺服馬達的負
載太大了,這會造成反應速度的延遲,改成三輪車之後我們到反應速度離”即時”
更進一步,也能在調高速度的情況下跑完了。
最後講講 App,很多人都適用 App inventor 寫,可是我很想試試看自己用編
輯器做出來,所以花了兩個晚上研究 cordova 框架和側試藍芽功能,終於研發完
成。之後練賽車的時候我的任務就是因應車手的需要不斷的更改軟體讓車子能跑
得更順。而我們最後的確跑得不錯(16 強止步,應該進 4 強的哈哈)。這次的開發
雖然辛苦,卻是難忘而值得回憶的一次經驗。
陳毅嘉
「通過了期中考核,通過了期末競賽。回想起來這門課給了我們許多東西去學期。」
先從組員說起,這非常重要,沒有這群夥伴就沒有今天這個成果。首先要特
別感謝隊長-徐子秦,一間扛起了所有的機電系統的整合,沒有隊長,我們的自
控車沒辦法有那麼傑出的大腦來跑完全程。
第二個組員-倪嘉宏,感謝他在小組內扮演著萬能的腳色,從扇葉設計到期
末大改版變成三輪車,嘉宏在這方面可以說是鞠躬盡瘁,並且對於零件的供應提
供很大的協助,可以說是有求必應。另外除了萬能先生之外,嘉宏也是組內最佳
的溝通者,協調軟體部門和硬體部門的整合,對於問題解決扮演著關鍵戲腳色。

32
第三位組員-陳昱臻,以一句話來開場,沒有她,我們沒辦法順利度過期中
和期末,感謝昱臻願意一手包辦起期中報告,期末海報和報告。讓其他人可以專
心應付在車子試跑上。還有期末競賽以車手的身分,帶領我們闖出好成績。
第四位組員-陳致嘉,是一位默默付出且不可缺少的組員,風力車報告當大
家對於扇葉分析一頭霧水時,他就已經接下任務並且成功完成他。另外他最大功
勞在於保養組上那分常操勞的 3D印表機,讓機器可以無時無刻保持在最佳狀態,
可以隨時應付組內各式各樣工件需求。
這門課最大收穫在於團隊合作,從分工到溝通,到修改討論,每個環節都是
課堂上沒辦法習得的珍貴經驗。
其次因為這門課,讓自己塵封已久的工圖繪製,可以重出江湖,但卻發現已
經不符需求了,要 3D 列印,要做切片,要做分析,要做工程圖標註。這可以算
是逼自己上梁山,在短短的一學期中,除了原有的 Autocad、Creo,又多碰了
360Fushion、123D Design 及 3ds MAX,學習效率算是上大學以來最佳的一次
最後這門課帶給我的瑰寶是在於發掘自己對 3D 列印的興趣,這學期中對
3DP 完全的投入,參數的調整,列印溫度和速度,及切片軟體的使用。都帶給自
己一個全新的認知,也因為這些經驗,未來會選擇相關產業做發產,比較可惜點
是系上目前沒有相關課程可以選修,希望之後能有開設。
倪嘉宏
「一個學期下來,好像做了很多事情,卻又好像沒有很明確的學到甚麼。」
在整個專案的過程當中,自己扮演的角色是最模稜兩可的。有製造的部份、
有設計的部分、有程式撰寫的部分、有實驗的部分。也許正像是學期初詹魁元教
授所說的,這堂課是一堂總整課程,我所學習到的能力是統合之前所學的各種知
識並且運用到實務當中。這麼一台小小的風扇驅動的車子,需要設計、需要製造、
需要流場分析、需要程式、需要控制,哪裡還像是之前的科目那麼單一。也正因
此,整個 air-formula 的專案當中,我在不知不覺當中被逼著用到了各種能力,卻
沒有很明確的感受到學習帶來的成長。但我也慢慢地發覺,能好好的運用所學到
的知識,不也就是一種能力嗎?身為機械系學生在過去的時間當中,承受著各種
不合理要求所學到的東西被妥善運用在從零開始的一個專案設計,就是一種珍貴
的能力。

33
在整個專案的執行當中,也不總是一帆風順的。我相信我們組的開始時間早
了別組許多個禮拜,卻因為馬達、電池與電變的選配不得當,被拖延了數周的進
度。說起來也諷刺,如果我們在別組開始的時間開始,也許就能直接詢問到別人
的選配方案,也不會多走那麼多冤枉路,比如燒壞三顆馬達,燒壞一個電池,並
且都要價不斐。成為進度最快的隊伍猶如在黑暗中摸索,沒有任何情報或同儕的
提示,只能到處蒐集資料,從店家、網路論壇等等地方詢問。可惜,後來還是一
直等到別組順利完成電池馬達電變的搭配之後,我們才參考別組的選配而搭出穩
定不會燒壞的方案。也許這也是一種寶貴的經驗,在往後工作的日子當中,很有
可能自己的工作也是業界的領頭羊、沒有任何前人的設計或解決方案可以參考。
真正值得信賴的就是自己腦中小小的資料庫、一些前輩的建議等等。
在整個專案的過程當中,最重要的還是要感謝隊友的鼎力相助。無論是子秦
強大的程式撰寫能力,包辦了循跡程式的控制、藍芽傳訊的 app 介面以及車車接
受訊號的方式,還是毅嘉與致嘉強大的製造與設計能力,繪製與印製車子的各種
零件,還是昱臻強大的統合能力,把大家的努力過程都打入報告當中,成為兩份
可歌可泣、動人的結案報告。我們是一組沒有爭吵,直直看著目標但迂迴前進、
匍匐前進、小小一台車子做的淚流滿面的組別。零零總總的挫折與合作度過難關
的回憶,都是成長的痕跡。
陳致嘉
這學期一起和組員將一臺風力車從無到有努力地把它完成。一開始時,我們
因為有 3D 列印製造方便,進度原本還在我們的預想,只是在馬達電池方面,因
為沒什麼經驗,所以在運轉時燒壞了幾顆馬達,造成研發預算的提升。當時較少
組別和我們在同樣時間點上開始製做,馬達上的問題也不太確定要去問誰,只能
靠自己摸索,詢問店家等等,後來還是參考其他組別的馬達配置,才完成這部份。
如果能多詢問別人而不是自己摸索,在這方面摸索所花的時間和花費或許也能減
少。除了馬達動力配置之外,整個車體結構從設計、製造、控制系統、風扇設計
分析,到最後的報告統合,都要感謝組員的鼎力相助,才能在最後完成我們的最
後成品。在工作作業上,我負責了 3D 製造方面,以及ㄧ部分的風扇扇葉分析,
但無論是徐子秦的控制系統、倪嘉宏各方面的支援,一部分車體設計加工、風扇
設計,甚至是一部份的程式編輯、陳毅嘉的設計繪圖,以及陳昱臻最後的報告統
合整理,缺少一位都無法使我們的成品順利完成,非常感謝組員們的付出。

34
陳昱臻
機械工程實務這門課就要在打完結案報告的這一刻畫下句點了,說實在真的有點
感傷。我自己是不是擅於實作的人,眼見學期初組員們各個身懷絕技,擁有 3d
印表機、有優秀繪圖能力、有厲害程式撰寫及 app 開發能力,完成氣動車所需的
知識技能,組員們都具備了。因此,我只能認真跟隨大家的腳步,當那顆不可或
缺的螺絲釘,囊括各種書面報告、海報及口頭報告,和大家一起完成整份專案。
尤其是書面報告,最後的統整讓我見證了這學期大家是如何一起完成夢想,很高
興能和組員們度過這學期!
二、課程建議
期末競賽
(一)賽道過於窄小
最內側及外側車子出發時要避免被擠出去,亦有高機率四台車碰撞而動彈不
得。車子比賽過程不是在比技術、性能,而是比車手閃躲別人的技巧。這樣應該
不是原本比賽的初衷吧?如果時間允許,是否可以減少同時上場人數,或是拓寬
跑道。
(二)場地室溫
未來是否能架設電風扇或改善通風?當時場地感覺很悶通風不太好,而且有
問到助教主持完比賽後覺得身體不適,快要中暑。
(三)切西瓜的爭議
希望能沿用去年機制:六個檢查點,不可連續錯失一個以上;可以在選手站
的地方(內圈)鋪設人工草皮。
(四)起跑點不要在同一直線上
類似像賽跑,分前後起跑,且可以減少一開始就全部撞在一起的狀況。
(五)賽況監控
裁判等相關人員似乎無法隨時監控每一台車的狀況,可能已經繞完卻沒察覺,
或是超出界外過多沒發現…等等。
(六)初賽公平性
兩個跑道分開比有點不公平,其中一個跑道的邊界已貼牆,若稍微超出必撞
上牆無法開回來。另一點則是兩組裁判評斷標準不一。
(七)場中央擁擠
競賽時,場中央有裁判們及車手們,時常因為視線問題或人群過於壅擠,造
成無法時時刻刻看見車子並進行操控車子。

35
附錄一、整體架構

36
附錄二、3D printer 相關數據
一、3D 列印機數據
二、部件 3D 列印相關參數
部件 車底 風力動力 轉向機構
車架 保險桿 輪框 電池架 扇葉 馬達架 保護罩 四連桿 輪軸
熱床使用 是 是 是 是 是 是 是 是 是
層高(mm) 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3
填充率(%) 50 10 50 10 100 50 10 30 100
重量(g) 76 8 34 18 24 28 63 13 14
印製時間(hr) 9.2 0.5 2 1 1.5 2 4.5 1 0.9
支撐材 Everywhere None None Touching
builplate None
Touching
builplate None None None
黏附平台 Brim Brim Brim Brim Brim Brim Brim Brim Brim
型號 Atom 2.5 EX(Delta)
線材 採用 PLA
額定公差
X 軸 0.1~0.2mm
Y 軸 0.3~0.4mm
Z 軸 0.1mm
校正程序 1.較正噴頭與列印底板之間高度
2.校正列印位置
維護保養
1.上潤滑油至滑塊與滑軌間
2.鎖緊因列印震動鬆脫的螺絲螺帽
3.調整控制噴頭皮帶確保張力相同

37
附錄三、控制系統細部說明
整個系統架設完成之後,將控制參數和系統可以改動的參數(ex. pin 腳位參
數)設成 Global variable。往後的維護者或使用者可直接透過改動全域變數,完成
對控制器功能的一些設定。
下表對全域可調參數進行解說,其中不包括所有的全域參數,但其他參數的
調整需對系統有進一步的認識
全域可調參數
功能 預設
風扇馬達
sp1 ESC 控制訊號腳位 12
motor_intit_pin
有上拉電阻,通/斷此腳位,系統
會重新執行電變的預設設定函數
(該函數在 setup 時會跑過一遍)
10
Power 設定對風扇 motor.write()的訊號大
小,必須大於 0 小於 180 90
init_power
剛進入循跡模式啟動時,給予風扇
motor.write()的訊號大小。為克服
啟動時的摩擦力,量值需較 power
更高
100
IR 參數
dRR 最右側 IR 腳位 3
dR 右側 IR 腳位 4
dM 中間 IR 腳位 5
dL 左側 IR 腳位 6
dLL 最左側 IR 腳位 7
伺服馬達參數

38
servo_pin 伺服馬達的訊號腳位 11
Pos 伺服馬達的平衡位置 90
控制參數
Kp P 控制的控制倍率 20
delay_time 系統停滯的時間(ms) 100
開機與關機
chmode_pin 有上拉電阻,接通/斷此腳位,系
統會從待機模式進入開機模式 2
runtime 為一保險機制,設定系統強迫關機
的最高運行時間 30 * 1000
下表對待機模式提供的服務進行解說
待機模式功能
待機模式
本身
系統完成基本設定後,進入待機模式,隨
時等待開機訊號(可以從電腦或腳位啟動)。
收到開機訊號後,啟動無刷馬達並進入循
跡自走模式
馬達調控
此界面允許使用者透過 servo 函式庫,傳訊
號給無刷馬達電變,在馬達啟動異常時維
護人員可以直接進入該模式設定
使用介面: a + number
輸入在序列埠監控視窗
以下對循跡模式的運轉進行解說。基本上循跡模式中系統擁有絕對的控制權,只
能等待其執行完畢自行退出,或強制 reset Arduino 停止。
循跡模式功能
循跡模式
取得 IR 訊號 傳入 IR 擷取到的訊號

39
PID 運算 對 IR 偵測到的訊號 apply PID control(暫時只用 P
control),將這個參數設為 react
例外處理 針對一些例外狀況(嚴重出線),對 react 做一些處理
伺服馬達反應 將 react 參數給予伺服馬達函數做反應
後設置 紀錄該次反應狀況並且清空一些 buffer
檢查是否有停車訊號 如果偵測到停車訊號,關閉無刷馬達並進入待機模式
為了方便控制車子的啟動與開關,以下為系統接受的開機與關機訊號
系統開/關機訊號
開機訊號
Pin2(具有上拉電阻)發生電壓
變—change
目前做成硬體開關(按->啟動搖
桿)
由電腦輸入 ’s’ 字元訊號
關機訊號
系統設定的時限到時 設定 runtime 變數
由電腦輸入 ’n’ 字元訊號
當所有 IR 都接收到 1 的訊號
當偵測到色階淺於或等於綠色的地面

40
附錄四、App 相關檔案說明
App 資料夾架構
www
放置撰寫主要介面及功能
的程式碼
Index.html
使用網頁語言描寫的 App 使用者介面
css
介面的排版控制
index.js
App 功能撰寫:主要為藍牙搜尋、顯示、連線與資料
傳輸
其他檔案
引入網頁框架檔案
plugin
引入的外掛模組
cordova-plugin-bluetooth-serial
藍芽功能外掛
platform
App 運作的平台相關環境與編譯檔案,使用 android
node_modules
nodejs 引入的模組檔案
res
cordova 框架的資源資料夾
package.json
描述專案架構與引入的資源
hooks, config……
說明檔與系統設定檔…等

41
附錄五、BOM 表
序號 品項 類別 材質 數量 單位 單價 價格 備註
1 車架 訂製 PLA 1 個 64.6 64.6 PLA 價格以克數*0.85 計算,下同
2 保險桿 訂製 PLA 1 個 6.8 6.8
3 輪框 訂製 PLA 4 個 28.9 115.6
4 電池架 訂製 PLA 1 個 15.3 15.3
5 扇葉 訂製 PLA 1 個 20.4 20.4
6 馬達架 訂製 PLA 1 個 23.8 23.8
7 保護罩 訂製 PLA 1 個 53.55 53.55
8 四連桿機構 訂製 PLA 1 組 11.05 11.05
9 輪軸 訂製 鐵 4 隻 5 20 直徑 3mm*長 55mm
10 車體 訂製 密集板 1 片 50 50 厚度 3mm
11 伺服馬達 訂購
1 台 330 330 型號 MG996R
12 輪胎 訂購
4 顆 60 240 SOR20T42
13 螺絲 公規 鐵 11 顆 2 22 1/8" * 1"
14 螺絲 公規 鐵 4 顆 3 12 1/8" * 2"
15 螺絲 公規 鐵 5 顆 4 20 1/8" * 3"
16 軸承 公規
4 顆 10 40 623ZZ 3*10*4mm
17 螺絲墊片 公規 鐵 51 片 1 51 1/8"
18 螺絲墊片 公規 塑膠 16 片 2 32
19 槳夾 訂購
1 顆 60 60 3.17mm 轉 5mm
20 無刷馬達 訂購
1 顆 150 150 MUKAS 2212 KV1000 13T
21 艾邁斯 訂購
1 顆 30 30 XT-60
22 電變 訂購
1 顆 360 360 40A/BEC PRO 級 2~4S
23 富力鋰聚電池 訂購
1 顆 499 499 11.1V 2200mAh 20C~40C
24 萬用板 訂購
1 片 28 28 7*5(cm)
25 萬用板 訂購
1 片 50 50 7*10(cm)
26 Arduino 訂購
1 片 190 190 UNO R3

42
27 循跡感測器 訂購
5 顆 76 380 IRS-90
28 母母杜邦線 訂購
1 排 48 48
29 公母杜邦線 訂購
1 排 48 48
30 2P3S 迷你搖頭 訂購
1 顆 15 15
31 L 型鐵 訂購
1 片 15 15
32 9V 電池 訂購
1 顆 150 150
33 藍芽模組
1 顆 210 210
總額 3361.1

43
附錄六、工程圖
期中測試版
○2
○1
○3 ○4
○9
○11
○10
○6
○7 ○8
○5

44
期末驗收版
○2
○1
○3
○4
○5
○6
○10
○11
○12
○13
○14 ○15

45

46

47

48

49

50

51

52

53

54
1:3
2
01
7.0
6

55

56

57

58

59