fugro’s g2+ worldwide centimetre-level positioning service · fugro’s g2+ worldwide...
TRANSCRIPT
Fugro’s G2+ worldwide centimetre-level positioning service Matthew Goode, Fugro Intersite B.V.
Offshore Energy 2015, 14 October 2015, Amsterdam, Netherlands
www.fugro.com 2
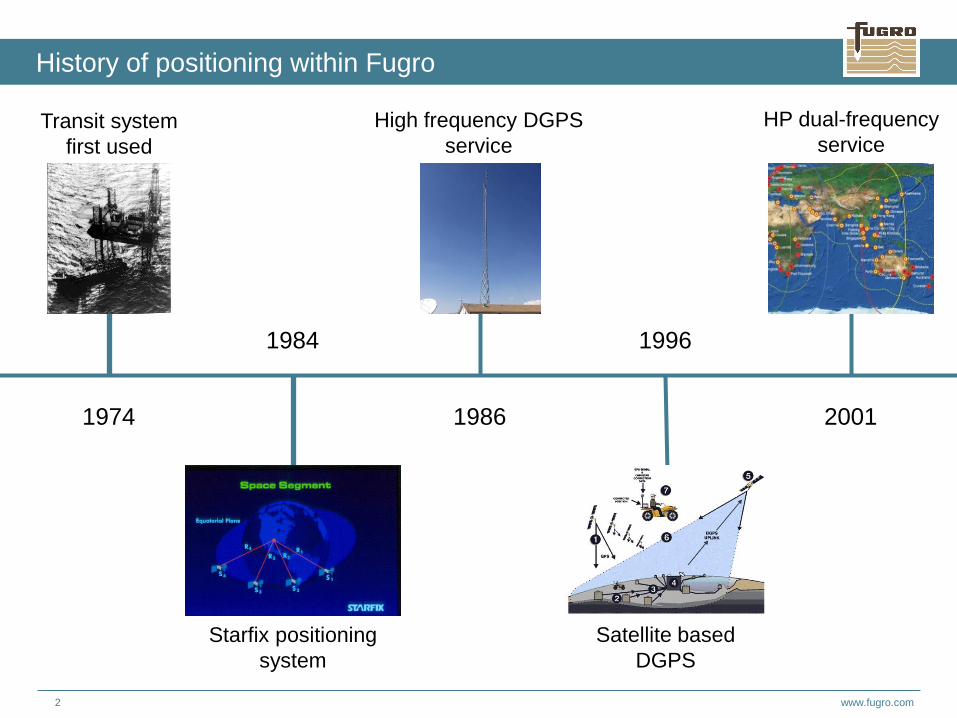
History of positioning within Fugro
1974 1986
1996
2001
1984
Starfix positioning
system
Transit system
first used
Satellite based
DGPS
High frequency DGPS
service
HP dual-frequency
service
www.fugro.com 3
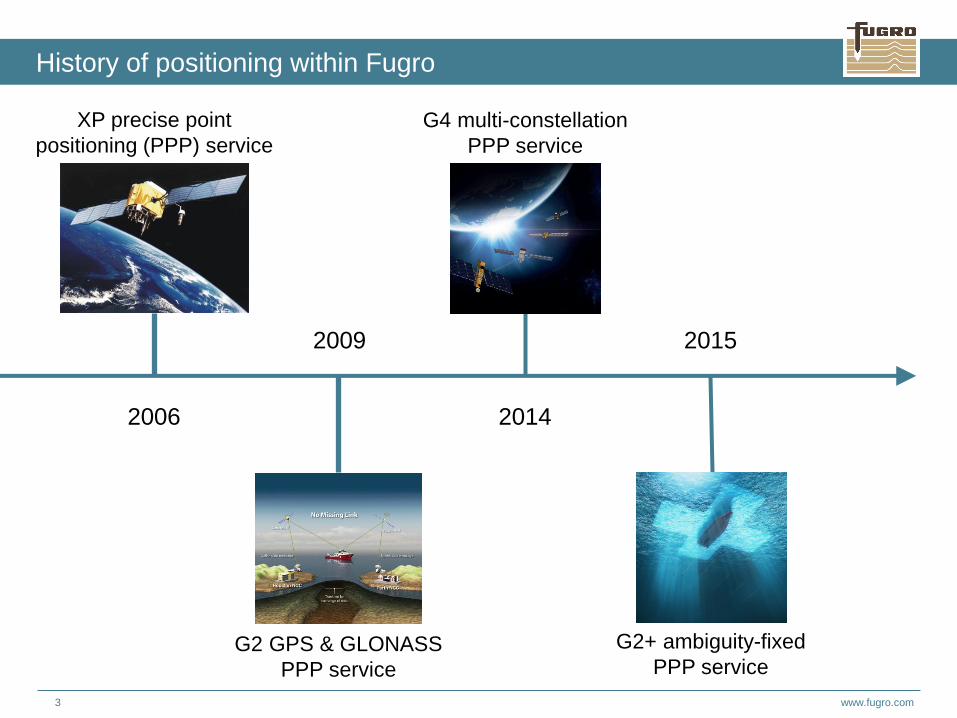
History of positioning within Fugro
2006 2014
2015 2009
G4 multi-constellation
PPP service
G2+ ambiguity-fixed
PPP service G2 GPS & GLONASS
PPP service
XP precise point
positioning (PPP) service
www.fugro.com 4
Orbit and clock corrections for GPS, GLONASS, BeiDou and Galileo
Improved availability and reliability
Galileo corrections available when Initial Operational Capability
(IOC) announced by the European Union
Starfix.G4
www.fugro.com 5
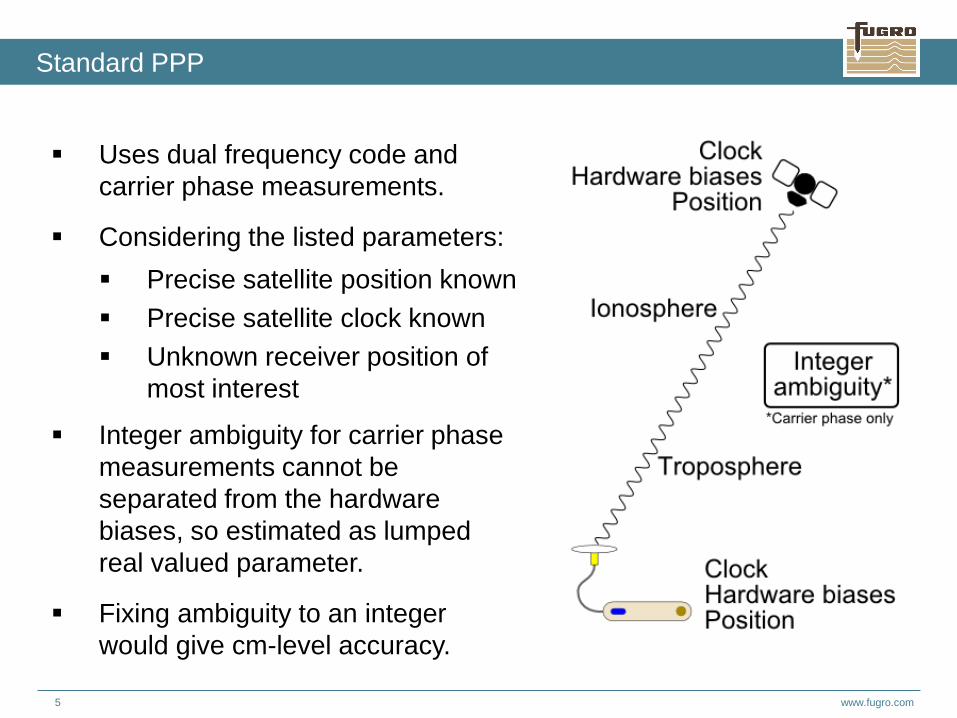
Uses dual frequency code and
carrier phase measurements.
Considering the listed parameters:
Precise satellite position known
Precise satellite clock known
Unknown receiver position of
most interest
Integer ambiguity for carrier phase
measurements cannot be
separated from the hardware
biases, so estimated as lumped
real valued parameter.
Fixing ambiguity to an integer
would give cm-level accuracy.
Standard PPP
www.fugro.com 6
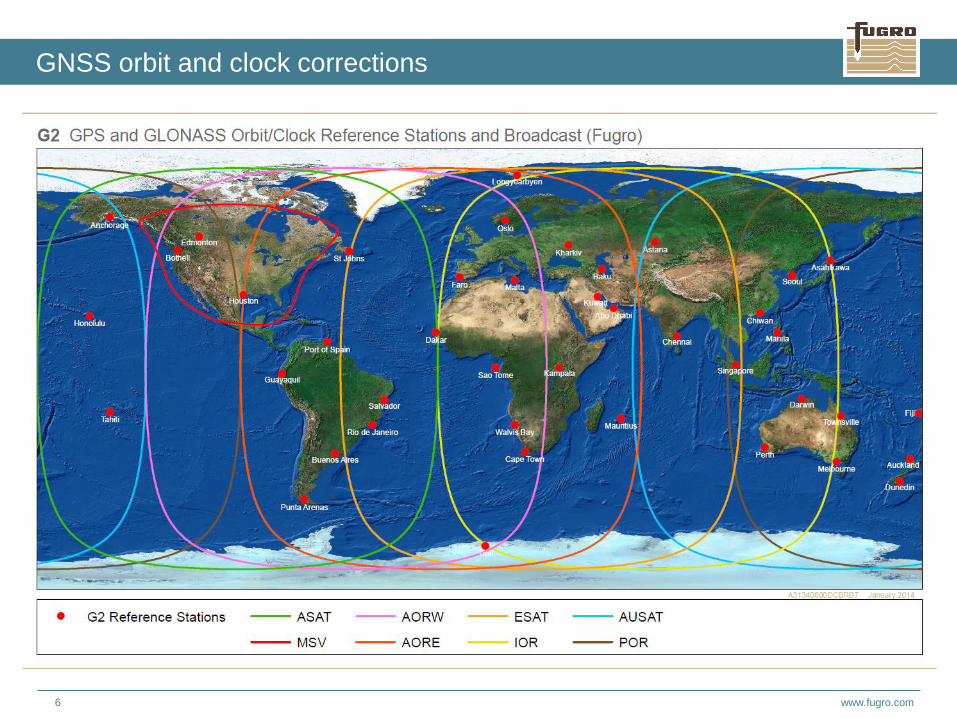
GNSS orbit and clock corrections
www.fugro.com 7
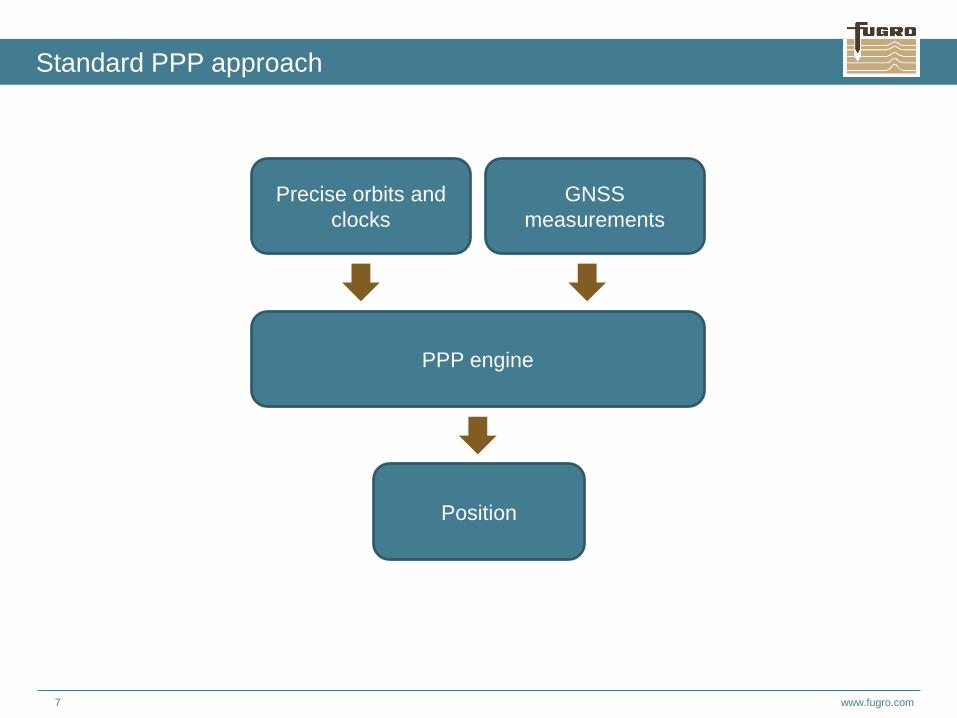
Standard PPP approach
Precise orbits and
clocks
GNSS
measurements
PPP engine
Position
www.fugro.com 8
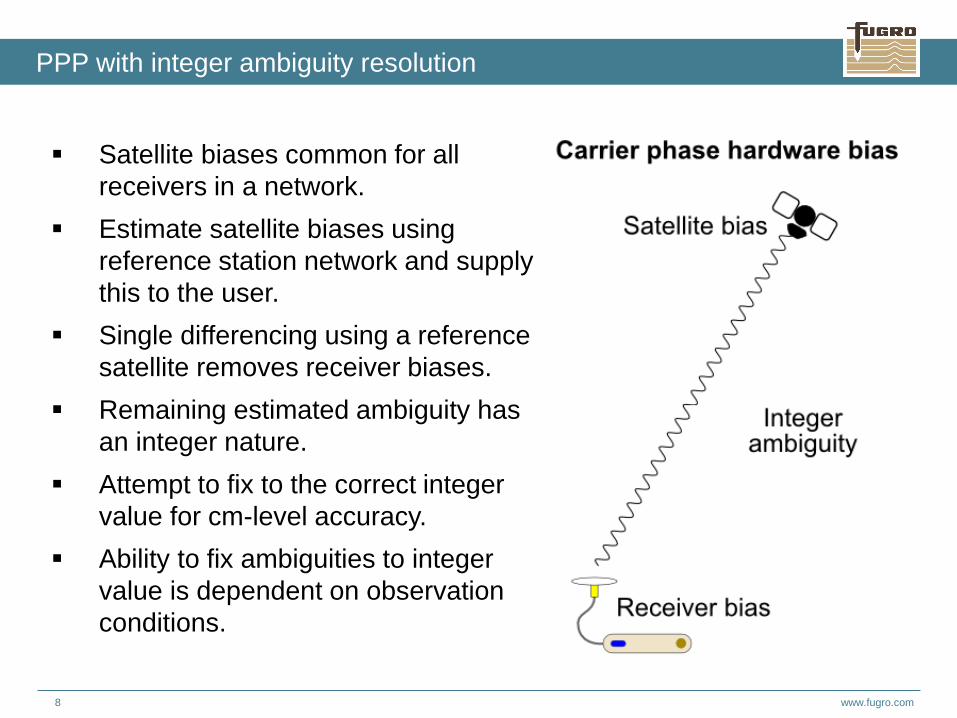
Satellite biases common for all
receivers in a network.
Estimate satellite biases using
reference station network and supply
this to the user.
Single differencing using a reference
satellite removes receiver biases.
Remaining estimated ambiguity has
an integer nature.
Attempt to fix to the correct integer
value for cm-level accuracy.
Ability to fix ambiguities to integer
value is dependent on observation
conditions.
PPP with integer ambiguity resolution
www.fugro.com 9
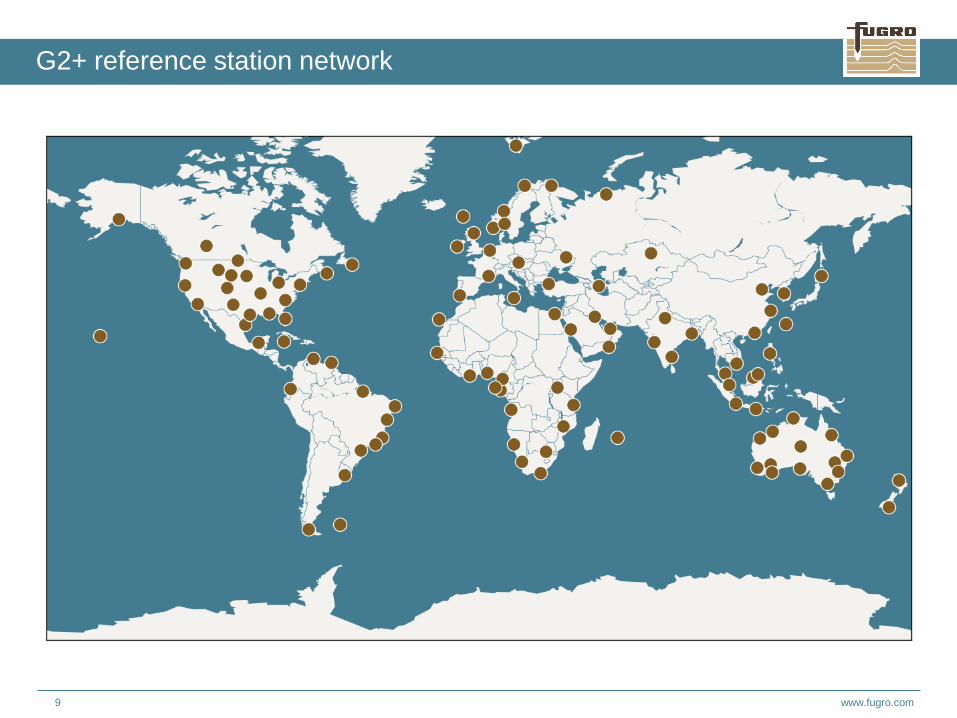
G2+ reference station network
www.fugro.com 10
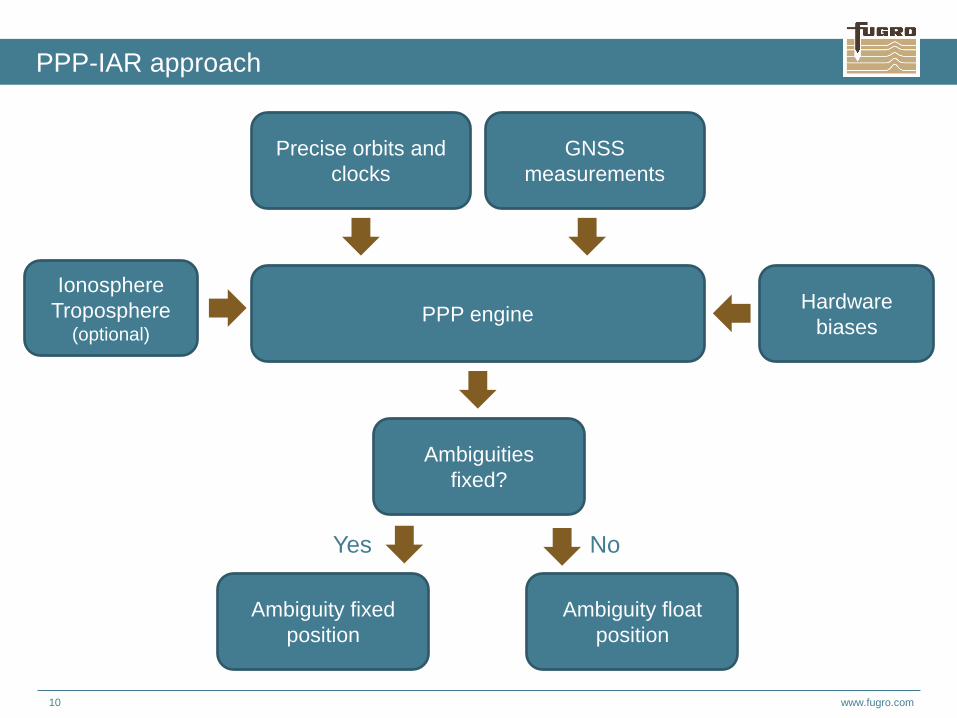
PPP-IAR approach
Precise orbits and
clocks
GNSS
measurements
PPP engine
Ambiguities
fixed?
Ambiguity fixed
position
Ambiguity float
position
Yes No
Hardware
biases
Ionosphere
Troposphere (optional)
www.fugro.com 11
Static results
www.fugro.com 12
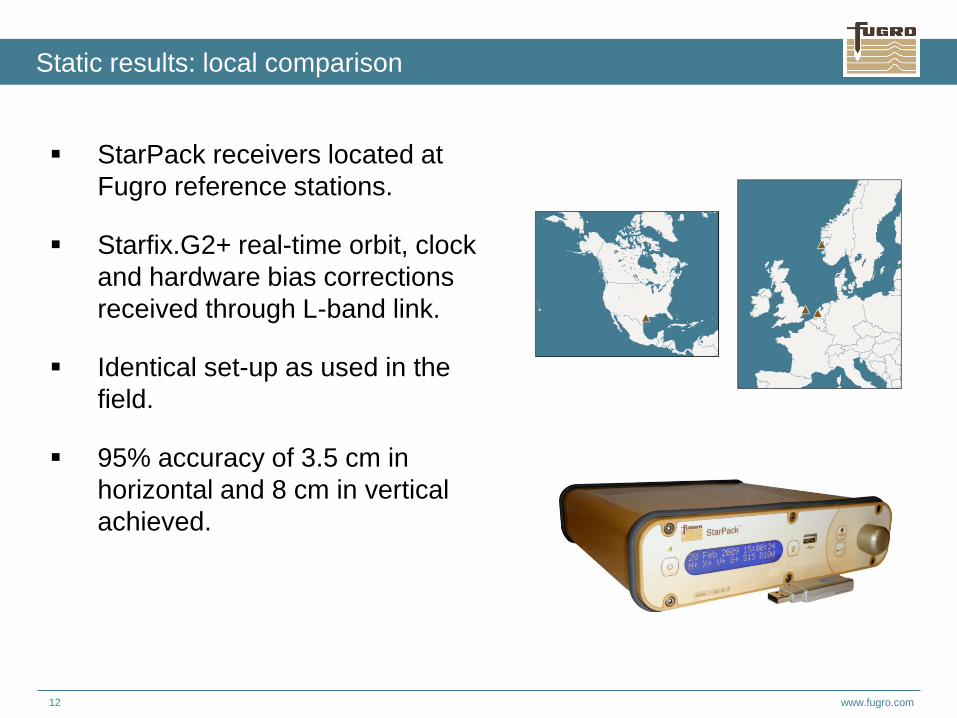
Static results: local comparison
StarPack receivers located at
Fugro reference stations.
Starfix.G2+ real-time orbit, clock
and hardware bias corrections
received through L-band link.
Identical set-up as used in the
field.
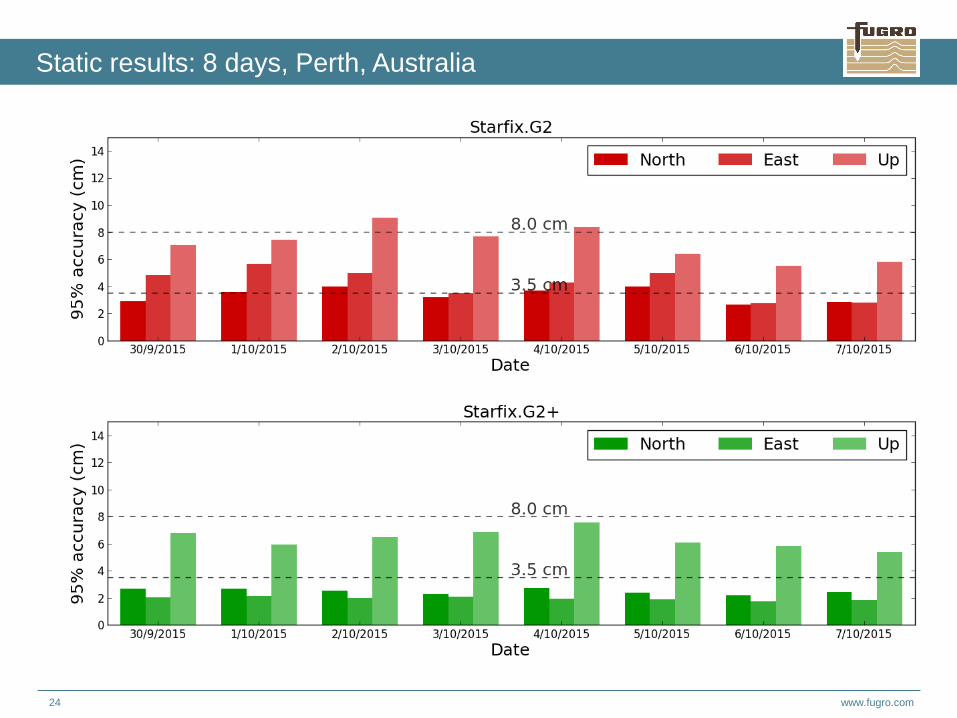
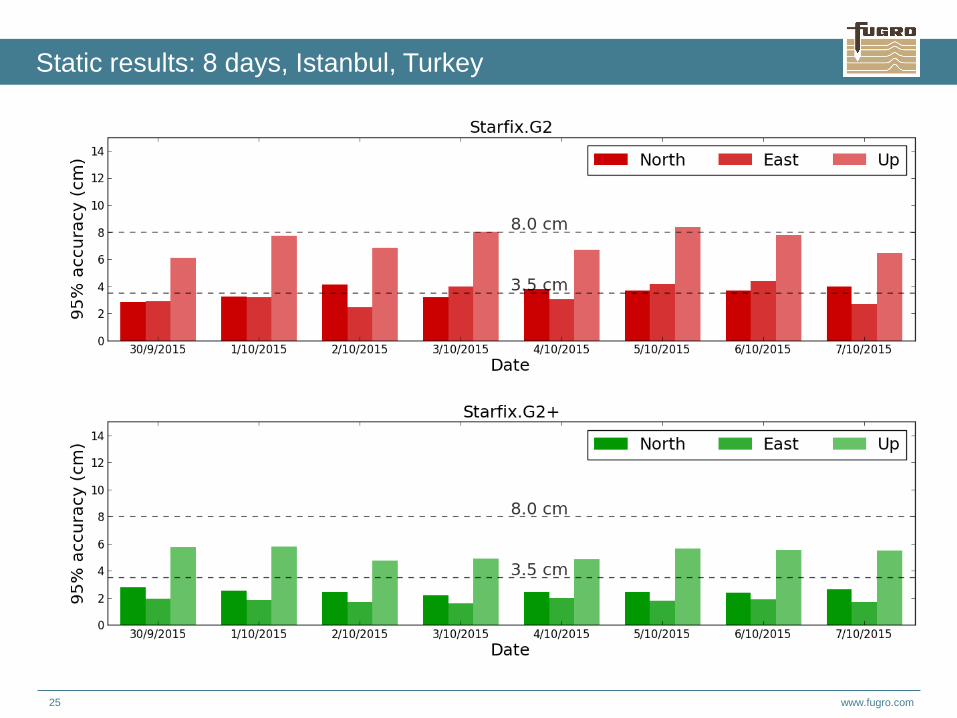
95% accuracy of 3.5 cm in
horizontal and 8 cm in vertical
achieved.
www.fugro.com 13
Static results: Bergen, Norway

www.fugro.com 14
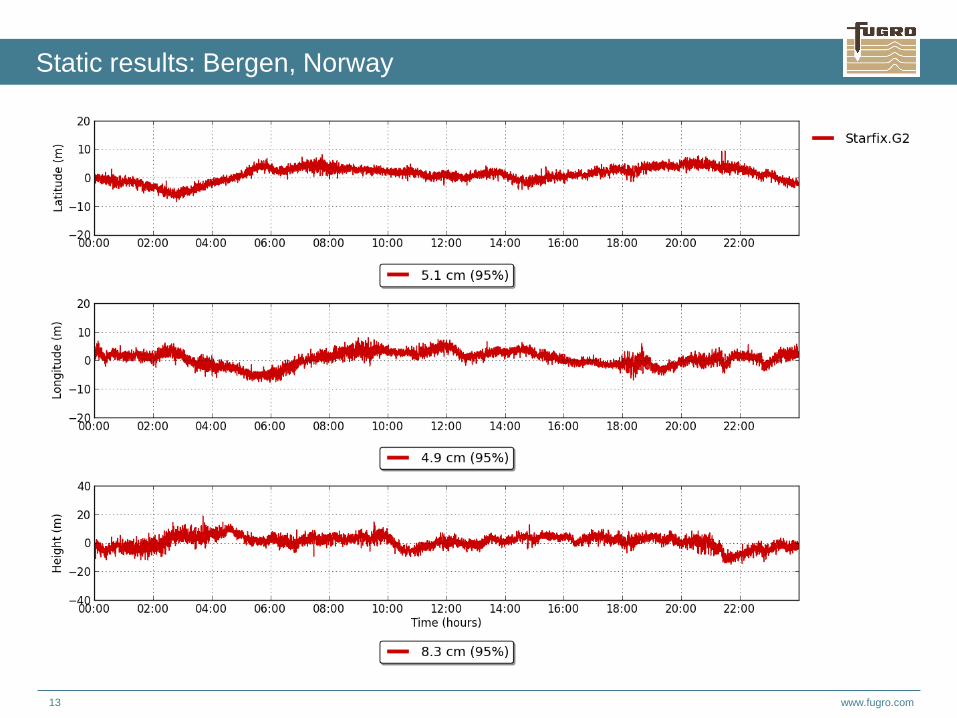
Static results: Bergen, Norway
www.fugro.com 15
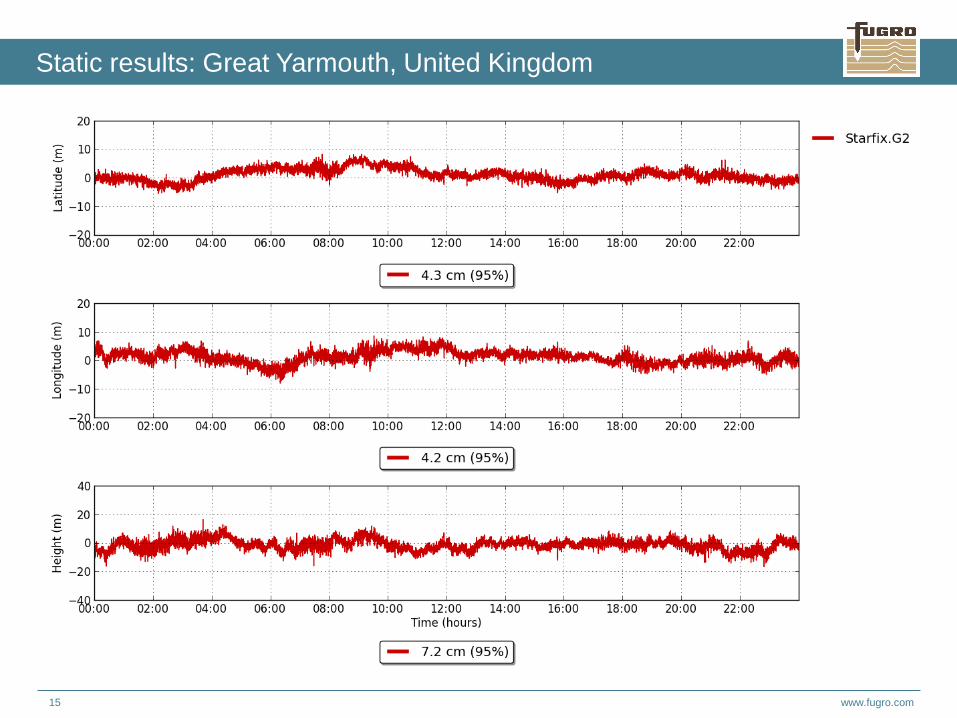
Static results: Great Yarmouth, United Kingdom
www.fugro.com 16
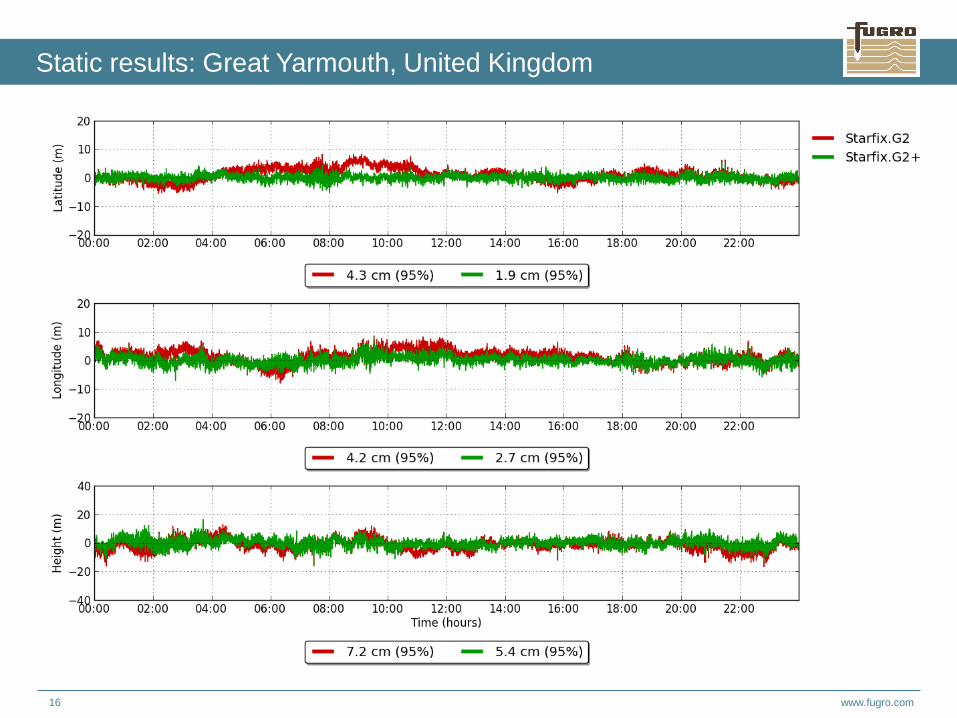
Static results: Great Yarmouth, United Kingdom
www.fugro.com 17
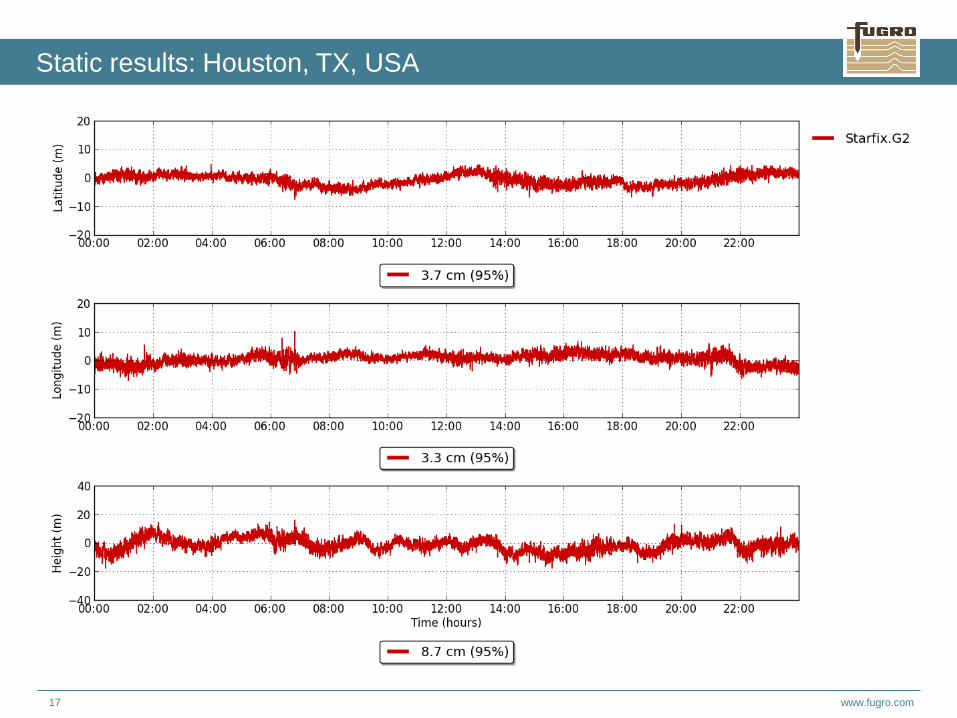
Static results: Houston, TX, USA
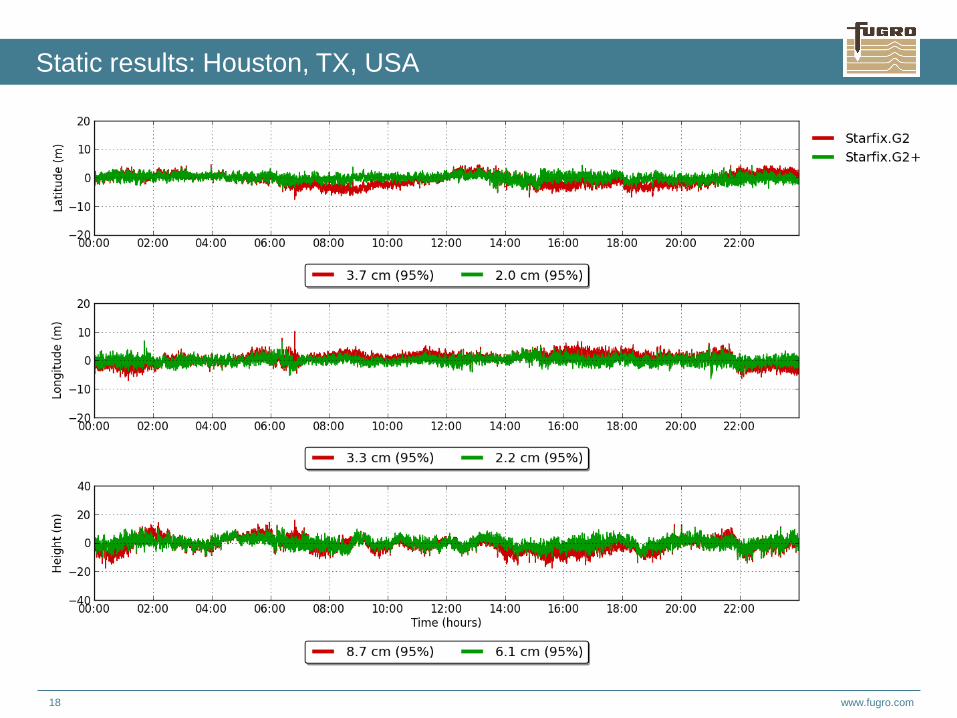
www.fugro.com 18
Static results: Houston, TX, USA

www.fugro.com 19
Static results: Leidschendam, The Netherlands

www.fugro.com 20
Static results: Leidschendam, The Netherlands
www.fugro.com 21
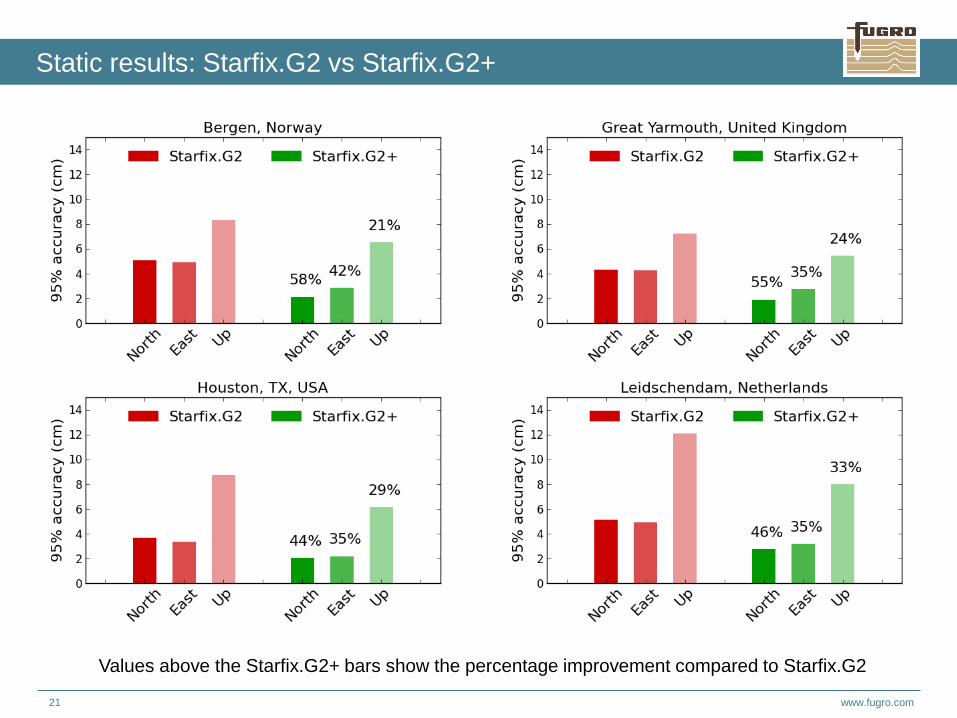
Static results: Starfix.G2 vs Starfix.G2+
Values above the Starfix.G2+ bars show the percentage improvement compared to Starfix.G2
www.fugro.com 22
Static results: global comparison
Global distribution of 101 sites
Comparison between Starfix.G2 and Starfix.G2+ solutions
Comparison of global sites for one day
Comparison of one site over 8 days
www.fugro.com 23
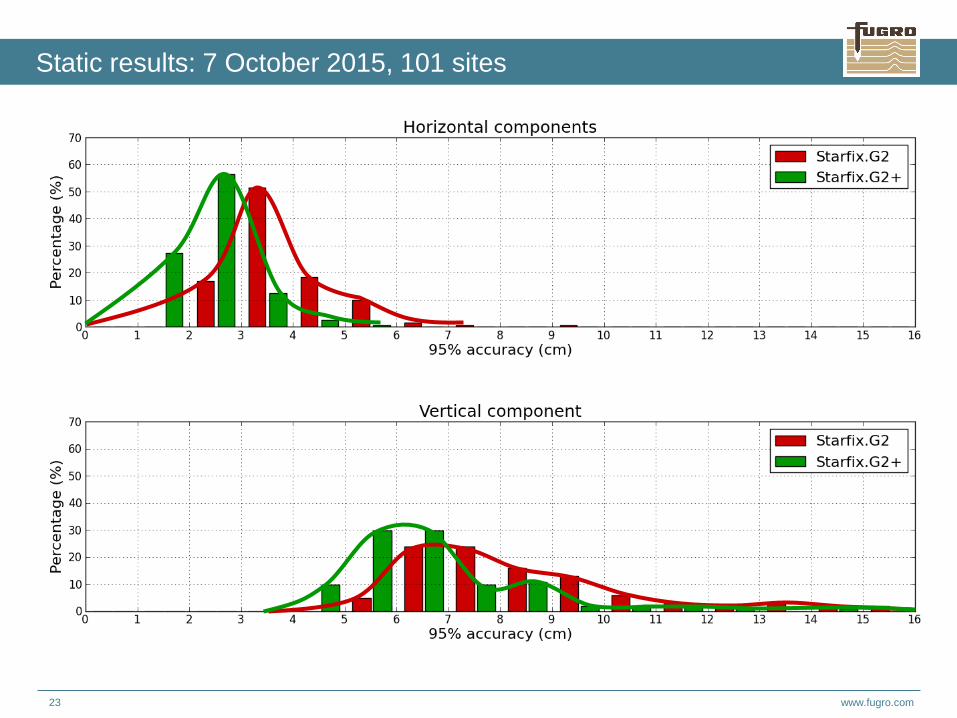
Static results: 7 October 2015, 101 sites
www.fugro.com 24
Static results: 8 days, Perth, Australia
www.fugro.com 25
Static results: 8 days, Istanbul, Turkey

www.fugro.com 26
Static results: 8 days, Romoland, CA, USA
www.fugro.com 27
Dynamic
results
www.fugro.com 28
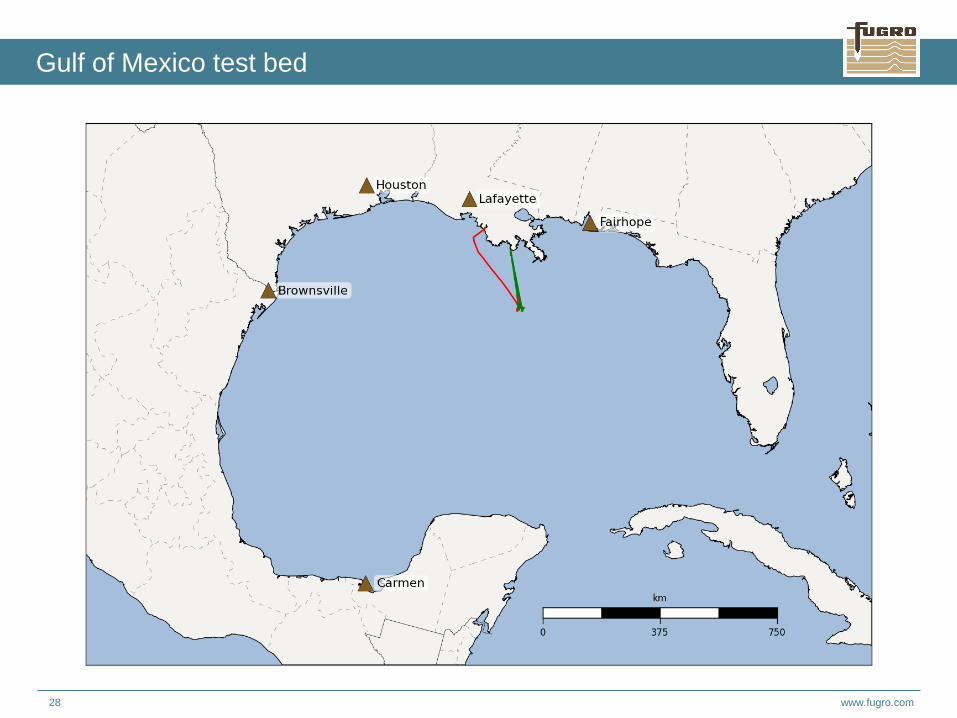
Gulf of Mexico test bed
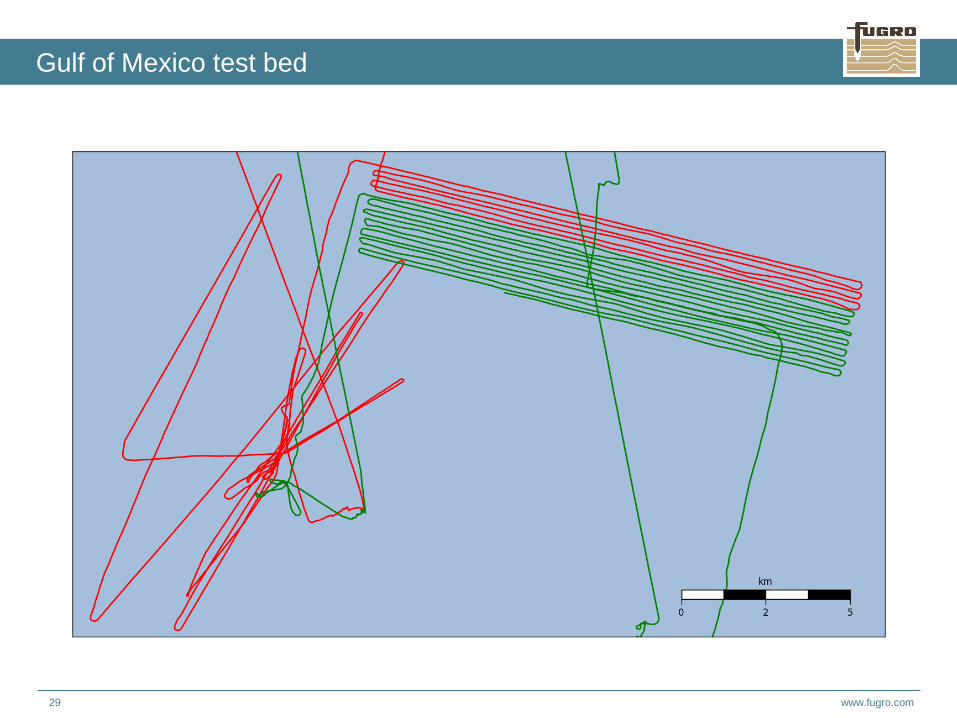
www.fugro.com 29
Gulf of Mexico test bed
www.fugro.com 30
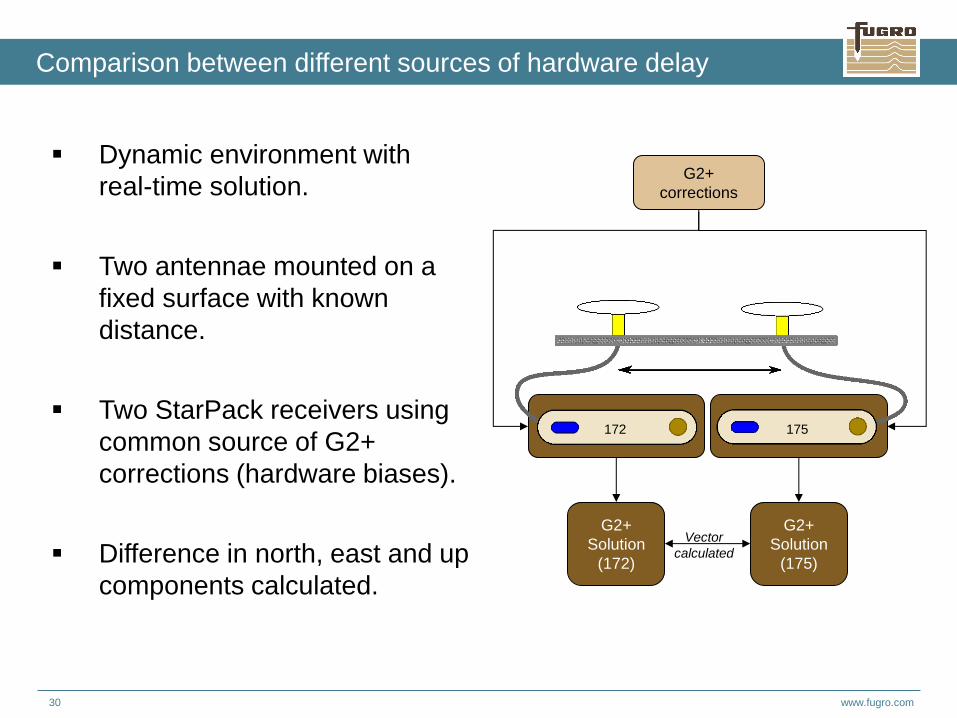
Dynamic environment with
real-time solution.
Two antennae mounted on a
fixed surface with known
distance.
Two StarPack receivers using
common source of G2+
corrections (hardware biases).
Difference in north, east and up
components calculated.
Comparison between different sources of hardware delay
G2+
corrections
G2+
Solution
(172)
G2+
Solution
(175)
Vector
calculated
172 175
www.fugro.com 31
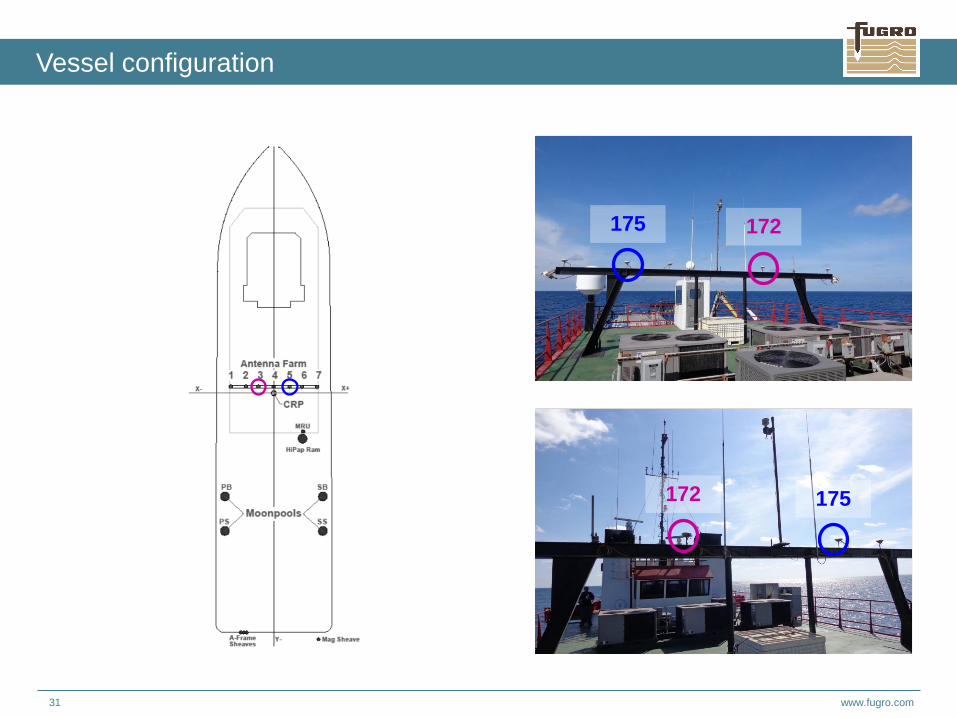
Vessel configuration
175 172
175 172
www.fugro.com 32
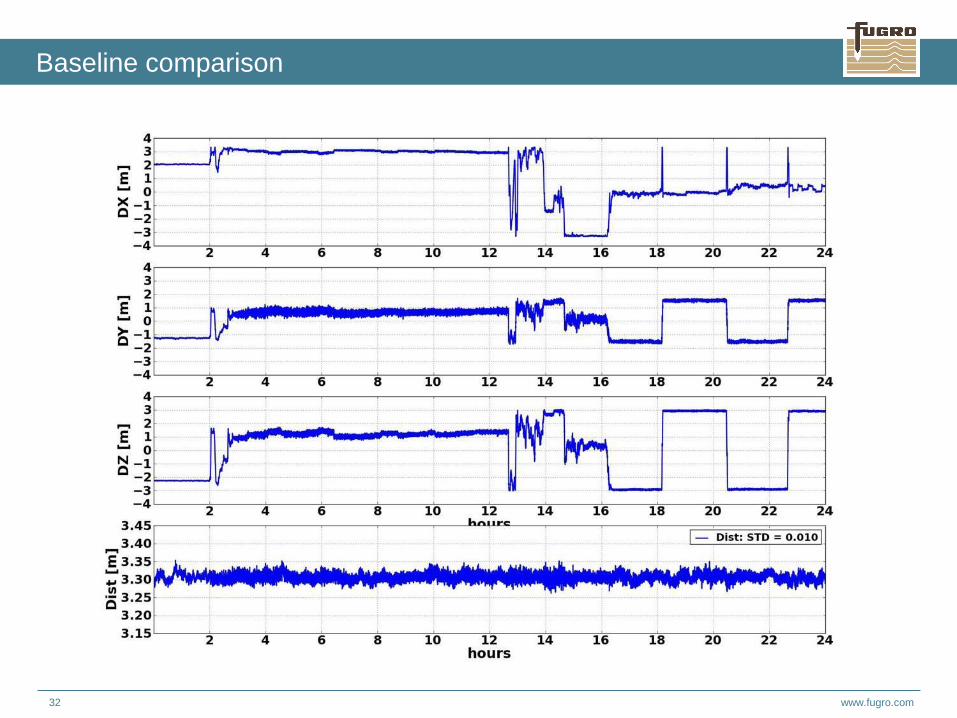
Baseline comparison
www.fugro.com 33
Offshore
Applications
www.fugro.com 34
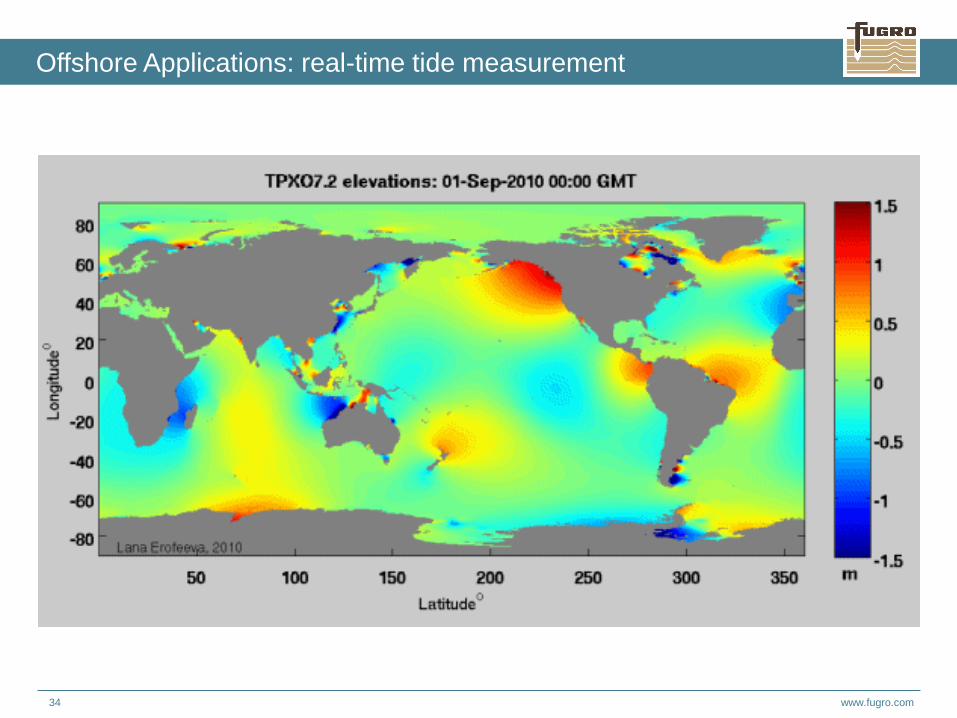
Offshore Applications: real-time tide measurement
www.fugro.com 35
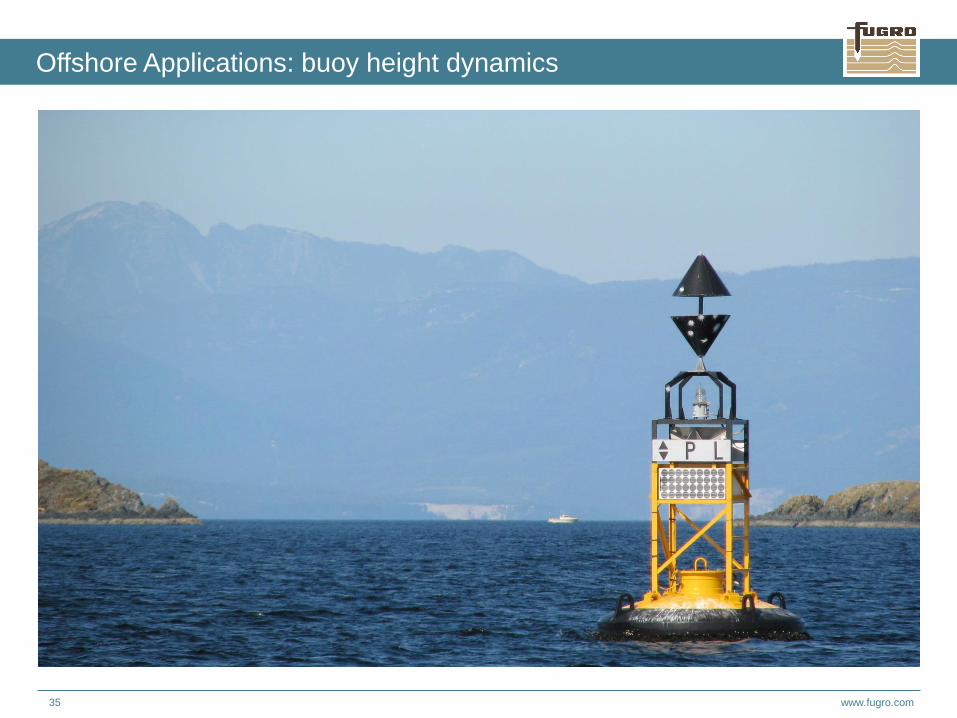
Offshore Applications: buoy height dynamics

www.fugro.com 36
Offshore Applications: real-time platform monitoring

www.fugro.com 37
Offshore Applications: Unmanned vessels
Source: Rolls-Royce Holdings/Bloomberg
www.fugro.com 38
Global real-time positioning with a
95% accuracy of 3.5 cm in
horizontal and 8 cm in height.
Tailored for the offshore market.
Successfully tested in dynamic
environments.
Already in use by Fugro
customers.
Conclusions
Matthew Goode
GNSS R&D Team
Geodesist
Fugro Intersite B.V.
Dillenburgsingel 69
Leidschendam 2263 HW
The Netherlands