full name: davut akdas mobile phone no: (+90) 505 950 33...
TRANSCRIPT
Full Name: Davut Akdas Place of Birth and Date: Bolu, Turkey, 1972 Email: [email protected] [email protected] Mobile Phone No: (+90) 505 950 33 14. Address: Balikesir University, MMF. Electric-Electronic Eng. CAGIS, Balikesir - Turkey I have degrees in Mechanical Engineering (1993, in Turkey) and Electronics Control Engineering (1996, in UK). My academic research is focused on designing, construction and control of Humanoid robots. I have work on humanoid robots named “Salford Lady” and “Gonzalez” in the UK, and “RoboTurk” in Turkey. I would like to continue to develop even more advanced humanoid robots.
Academic Activities and Work Experience
June 2003 - To Date: I am working at Balikesir University, as a lecturer. April 2002 - June 2003: I did my compulsory military service as a second Lieutenant in the Turkish Army. October 1997 - June 2001: I was awarded for PhD degree on the 12 of June 2001. My research involved mathematical modelling, design of control system and generation of locomotion trajectories for our biped robot, which led Europe in this field. My PhD objective was to make the robot walk forwards backwards, sideways and climb up and down stairs. Title of the Thesis: Modelling, Control and Locomotion of a Twelve Degree of Freedom Biped Robot. 1997 - 2000: I worked as laboratory assistant at undergraduate and MSc levels. I also gave tutorials for undergraduate students at the University of Salford. October 1996 - October 1997: I obtained my MSc degree in Electronic Control Engineering at the University of Salford in the UK with Distinction. My MSc project involved calculation of dynamical model of the biped robot in the frontal plane, design of control system and assessing its robustness properties. October 1995 - October 1996: I enrolled in a preparatory year required for my acceptance to the MSc course in Electronic Control Engineering at the University of Salford. October 1989 - October 1993: I was awarded my BSc degree in Mechanical Engineering with Distinction at Karadeniz Technical University, in Turkey. In my final year project, I investigated the distribution of stress in a pressurized cylinder using Finite Element Analysis Technique. Summer of 1992: I did a training course at TUBITAK for a period of two months. TUBITAK is Turkey's most advanced research centre. There, I was given short courses every week in different laboratories. Summer of 1991: I attended a two-month training course in Bolu cement factory in Turkey. During my visit, I learned about cement production. I also operated some of the machinery in the repair workshop.
Academic Awards and Successes 1997 MSc with distinction (Highest Cumulative Grade Point Average) in Electronics Control Engineering in the University of Salford 1994 I achieved the 5th highest mark in a nation-wide examination among the mechanical engineering graduates (who have minimum 60% average) in Turkey. 1993 Graduation with distinction (Highest Cumulative Grade Point Average) in Mechanical Engineering in Turkey. 1989 I was within the top 1% in math score in the nation-wide university entrance exam in Turkey (over all within first 2%).
Journals Publications Bicakci, S, Akdas, D. and Karaoglan, A. D,. “Optimizing Karnopp friction model parameters of a pendulum using RSM”, European Journal of Control, 2014. Akdas, D. and G.A. Medrano-Cerda, " Design of a stabilising controller for a ten degree of freedom biped robot using linear quadratic regulator theory", proceedings of the IMechE, Part C, Vol. 215, No: C1 pp: 27-43, 2001. Akdas, D., “Analog ve Dijital Kontrol Teknikleri İle İki Serbestlik Dereceli Konumlama Sistemi Tasarımı ve İmalatı”, 3E Electrotech, pp: 272 – 280, March 2014. S. Bicakcı ve D. Akdaş “İki Ayaklı Robottaki Temel Elektronik Devreler”, BAÜ, FBE Dergisi, Cilt 10, Sayı 2, Sayfa 73 – 81, Aralık 2008. D. Akdaş ve S. Bicakcı, “İnsansı Robotun Kontrol Sistem Dizaynı”, Otomasyon Dergisi, Mart 2009, sayı 201, Sayfa 240 – 250, ISSN: 1303–4820, Bileşim Yayıncılık A. Ş. Akdaş, D., "Çizgi İzleyen Tekerlekli Robotlarin Tanitimi", Türkiyede Ve Dünyada Otomasyon, Nisan 2013/4, Sayi 250, Sayfa 276 - 282.

Conference Publications D. Akdas and G.A. Medrano-Cerda, “Single support static balancing of a 12 DOF biped robot”, 2nd International conference on Climbing and Walking Robots, CLAWAR99, pp: 143-147, Portsmouth 13-15 September 1999. Akdas, D. and G.A. Medrano-Cerda (2001)"A Systematic Approach for Biped Robot Stabilization and Locomotion", International Conference on Information Technology in Mechatronics, pp. 197-202, 1-3 October 2001, Istanbul, Turkey. G.A. Medrano-Cerda and D. Akdas, “Stabilization of a 12 Degree of Freedom Biped Robot”, Proceedings of the 15th IFAC World Congress, 2002, Volume 15, Part 1, 2002. D. Akdaş ve S. Bicakcı, “Türkiye’nin İlk Çok Serbestlik Dereceli Prototip İnsansı Robotunun Tanıtımı”, Çukurova Üniversitesi, 30. Yıl Sempozyumu. 2008. D. Akdaş ve S. Bicakcı, “İnsansı Robotun Kontrol Sistem Dizaynı”, ELECO 2008, 26–30 Kasım 2008 Bursa. D. Akdaş, “İnsansı Robotun Yan Düzlem Kinematik Denklemleri ve Doğrusal Yürüme Eklem Yörüngelerinin Elde Edilmesi”, TOK09, YTÜ, İstanbul, 2009. M. İren ve D. Akdaş, “Stewart Platformunun İnsansı Robot Sistemlerinde Kullanımı ve İteratif Çözümleri”, TOK09, YTÜ, İstanbul, 2009. D. Akdaş, C. Candan, S. Bicakcı, “Ülke Savunmasında Gelişen İnsansız (Otonom) robotik sistemlerin Kullanımının Önemi”, SAVTEK 2010. Hüseyin Güneş, Alper Burmabiyik, Semih Keleş, Davut Akdaş, “Görüntüsü Alınan Bir Nesnenin Referans Bir Nesne Yardımıyla Boyutlarının, Alanının Ve Açısının Hesaplanması”, Timak 2012, Balıkesir. Ozan Karakulak, Oğuz Yaz, Erman Köybaşi, Sabri Bicakci, Can Candan, Davut Akdaş, “Pic Tabanlı Fırçasız Dc Motor Sürücü Tasarımı“, Timak 2012, Balıkesir Yusuf Tetik, Erman Köybaşi, Sabri Bicakci, Can Candan, Davut Akdaş, “İvmeölçer İle Alınan Yolun Hesaplanması Ve A R A Cın Başlangıç Konumuna Dönmesi”, Timak 2012, Balıkesir. Oğuz Yaz, Ozan Karakulak, Erman Köybaşi, Sabri Bicakci, Can Candan, Davut Akdaş, “Pwm Sinyalinin Duty Cycle Süresinin %0 İle %100 Arasında Değişimi İle Dc Motorun Hassas Kontrolü”, Timak 2012, Balıkesir. İbrahim Özcan, Davut Akdaş, “Mikrodenetleyiciler Kullanılarak Hızlı Ve Güvenli Haberleşme Sistemlerinin İncelenmesi”, Timak 2012, Balıkesir. Davut Akdaş, Poyraz Alper Öner , “Robotik Uygulamalar İçin Lazer Tabanlı Haberleşme Ve Tanılama Sistemi Tasarımı”, Timak 2012, Balıkesir. Ömer Pekdur, Can Candan, Davut Akdaş, Yaşar Akman, Sabri Bicakci, “Bilgisayarlı Tasarım Ve İmalat Yöntemleri Kullanılarak Krank Mili İmalatı”, Timak 2012, Balıkesir.
Completed Research Projects 1) Project Name: “Modelling, Control and Locomotion of a Twelve Degree of
Freedom Biped Robot” Proje No: - Start Date: 01-10-1997, Completion Date: 01-10-2000. Budget: 30 000 Pounds
2) Project Name: “23 degree of freedom humanoid biped robot”. This project is
supported by TUBITAK. Project No: 105E115 Start Date: 01-06-2006, Completion Date: 01-06-2009, Budget: 168 000 TL. Web page for the project: http://robot.balikesir.edu.tr/
3) Project Name: “An investigation of neural signals of living creatures”. This
project is supported by Balikesir University. Project No: 200631 Start Date: 15-06-2006, Completion Date: 15-06-2009. Budget: 6 000 TL.
4) Project Name: FPGA Based Image processing
Project No: 201145 Start Date: 01-06-2010 Completion Date: 01-11-2011. Budget: 3 750 TL.
5) Project Name: Hardware migration of FPGA Based Imaging
Project No: 201146 Start Date: 01-06-2010 Completion Date: 01-11-2011. Budget: 3 750 TL.
6) Project Name: Force Measurement of the Humanoid Robot Using FSR
Sensors Project No: 201248 Start Date: 01-06-2011 Completion Date: 01-10-2013 Budget: 3 750 TL.
7) Project Name: Higher Level Control of Humanoid Robot Using Virtual
Model Technique. Project No: 201247 Start Date: 01-06-2010
Completion Date: 01-10-2012 Budget: 7 500 TL.
6) Project Name: Pneumatic actuator supported, continuous mode
operational anthropomorphic robotic leg design, production, modeling, control, trajectory design and interactive graphical user interface generation. Project No: 201350 Start Date: 01-06-2013 Completion Date: 01-06-2014. Budget: 24 000 TL.
Completed Postgraduate Studies 1) Thesis Name: Design and production of electronics circuits of the humanoid robot and control of it. Degree: Master of Science Completion Date: 2009. Name of the Student: Sabri Bicakci 2) Thesis Name: Friend and foe identification system design. Degree: Master of Science Completion Date: 2009. Name of the Student: Ibrahim Ozcan 3) Thesis Name: Rapid communication between robot using lasers. Degree: Master of Science Completion Date: 2010. Name of the Student: Alper Oner 4) Thesis Name: FPGA Based Image processing Degree: Master of Science Completion Date: 2011. Name of the Student: Mustafa Taşcı 5) Thesis Name: Hardware migration of FPGA Based Imaging Degree: Master of Science Completion Date: 2011. Name of the Student: Erman Koybasi
6) Thesis Name: An investigation of robot development through the ages and their places in human daily lives. Degree: Master of Science Completion Date: 2011. Name of the Student: Merve Han 7) Thesis Name: Higher Level Control of Humanoid Robot Using Virtual Model Technique. Degree: PhD Completion Date: 2012 Name of the Student: Sabri Bicakci 8) Thesis Name: Force Measurement of the Humanoid Robot Using FSR Degree: Master of Science Completion Date: 2013 Name of the Student: Alev Fadiloglu
Undergraduate and postgraduate lectures last two years Academic Year
Term Name of the Courses Weekly Hour Theory Practice
2012-2013
Fall
Automatic Control 1 4 0 3D Engineering Design 3 0 Robotic Image Processing 3 0 Advanced Control techniques 3 0 Research Project 0 2
Spring
Automatic Control 2 4 0 Microcontrollers 4 0 Robotics 4 0 3D Studio Max 3 0 Advanced Control techniques 3 0 Research Project 0 4 Final year Project 0 1
2013-2014
Fall
Automatic Control 1 4 0 3D Engineering Design 3 0 Robotic Image Processing 3 0 Advanced Control techniques 3 0 Research Project 0 2
Spring
Automatic Control 2 4 0 Microcontrollers 4 0 Robotics 4 0 3D Studio Max 3 0 Advanced Robotic Systems 3 0 Research Project 0 4 Final year Project 0 1

Bipedal Humanoid Robot Project That I involved and Directed
Humanoid robot “Salford Lady” developed in Manchester UK under supervising of Dr. Medrano Cerda, in 1997. This robot was the MSc thesis of Davut Akdas. This robot had 8 degree of freedom (DoF), which there were 7 DoF in the sagittal plane and a single DoF in the lateral plane. It could walk forward and backwards.
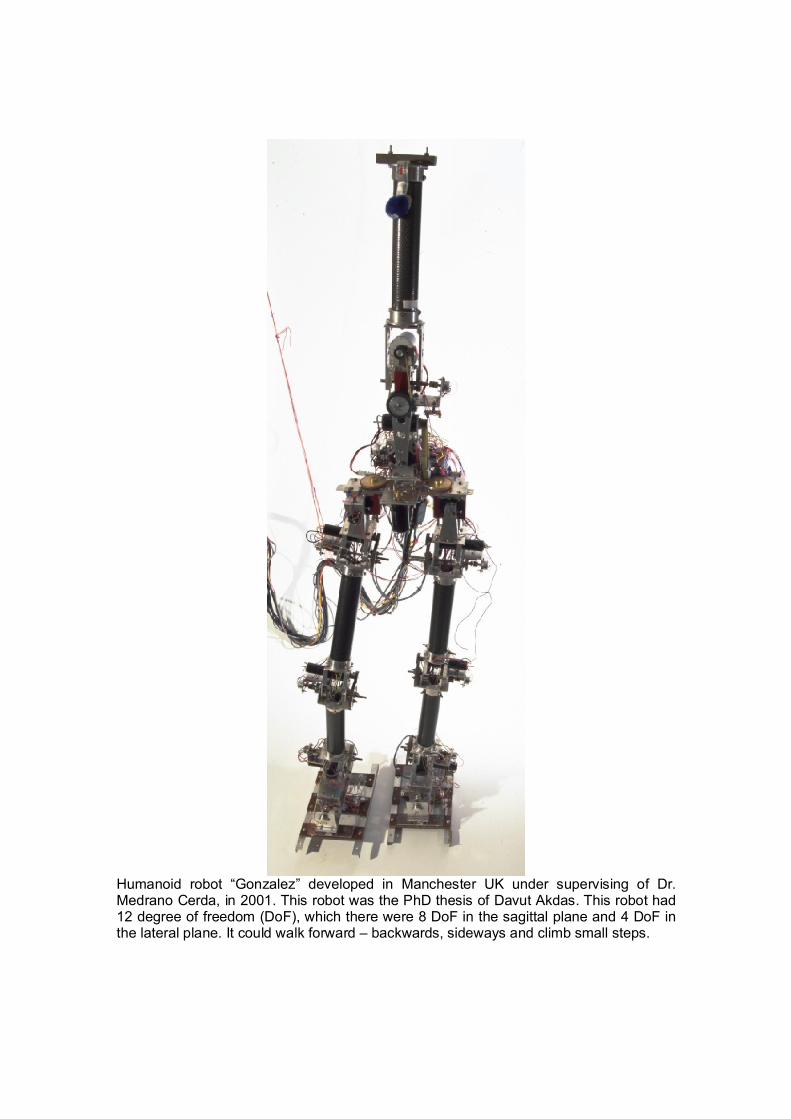
Humanoid robot “Gonzalez” developed in Manchester UK under supervising of Dr. Medrano Cerda, in 2001. This robot was the PhD thesis of Davut Akdas. This robot had 12 degree of freedom (DoF), which there were 8 DoF in the sagittal plane and 4 DoF in the lateral plane. It could walk forward – backwards, sideways and climb small steps.
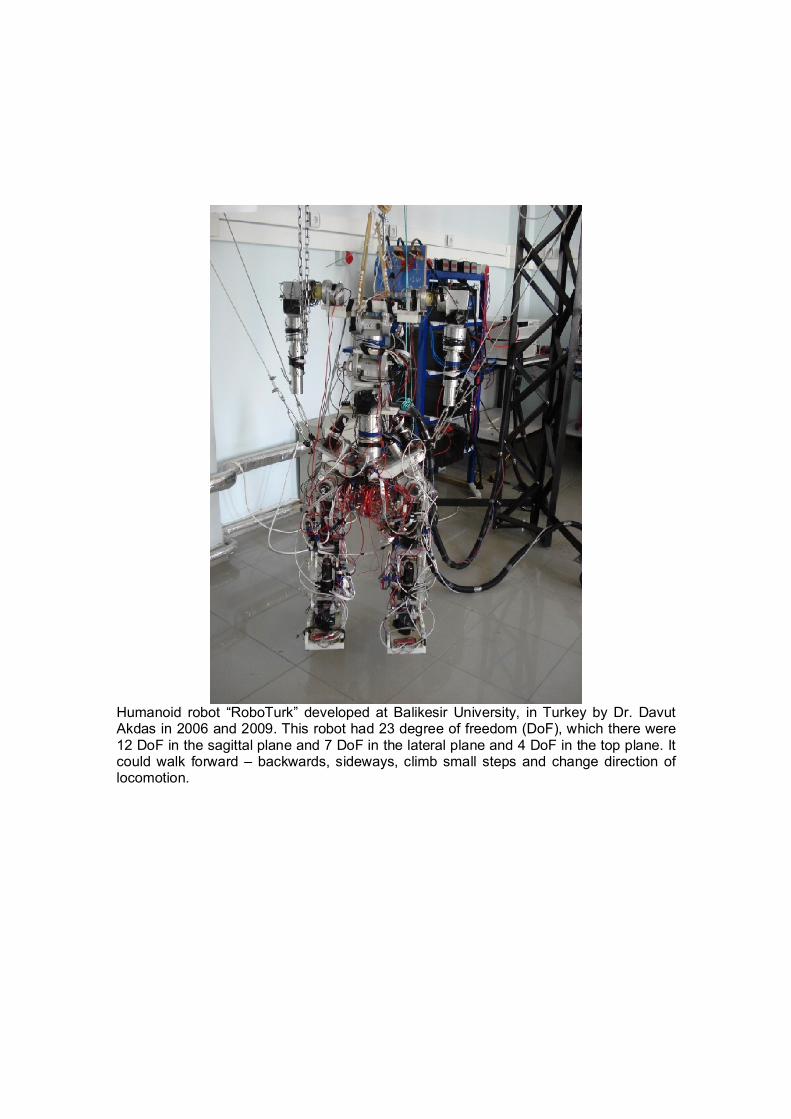
Humanoid robot “RoboTurk” developed at Balikesir University, in Turkey by Dr. Davut Akdas in 2006 and 2009. This robot had 23 degree of freedom (DoF), which there were 12 DoF in the sagittal plane and 7 DoF in the lateral plane and 4 DoF in the top plane. It could walk forward – backwards, sideways, climb small steps and change direction of locomotion.

Table: A Comparison of Our Humanoid Robots: Salford Lady, Gonzalez, And RoboTurk
Salford Lady Gonzalez RoboTurk Project Duration
36 Ay 36 Ay 36 Ay
Budget ~ 50 000 TL ~ 70 000 TL 168 000 TL
Number of Researchers
2 2 2
Degree of Freedom
12 12 23
Weight 12kg 18kg 55kg Height 160cm 170cm 150cm Movement Capability
1 Plane 2 Plane 3 Plane
Sensor Potentiometer Potentiometer Potentiometer and Encoder
Motor Power 15, 20Watt 20Watt 150Watt, 70Watt and 20Watt
Processor Intel 386 Based Intel 386 Based Dual Pentium Based Mechanic Material
Carbon fiber + Aluminum
Carbon fiber + Aluminum
Aluminum + Delrin
Control System Single Center Single Center Single Center Power Source Umbilical Cord Umbilical Cord Umbilical Cord
Control Architecture
Joint Position Control
Joint Position Control + Gravity Control
Joint Position Control + Gravity Control
Stability Control Technique
Optimal Control Optimal Control Optimal Control, PID
Production Method
Machining Machining Machining