„funktionsweise synchronmaschine“ - eal … srm with fully pitched windings (motor a) (rated for...
TRANSCRIPT

VorlesungElektrische Aktoren und Sensoren in geregelten Antrieben
„Funktionsweise Synchronmaschine“
Prof. Dr.‐Ing. Ralph Kennel
Technische Universität München
Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik
Arcisstraße 21
80333 München

die Umwandlung elektrischer Energie in mechanische Energie … oder umgekehrt …
… erfolgt grundsätzlich nach den Maxwell‘schen Gleichungen
1. Durchflutungsgesetz(Ampère‘s Gesetz mit Korrekturen von Maxwell)
2. Induktionsgesetz(Faraday‘s Gesetz)
3. Gesetz von Gauss(Ursprung elektrischer Feldlinien auf elektrischen Ladungen)
4. Gesetz von Gauss für magnetische Felder(es gibt keine magnetischen Monopole
– nur geschlossene magnetische Feldlinien)
… ‚Lorentz‘-Kraft
Krafterzeugung in der Synchronmaschine
1
… auch Nichtspezialisten können die Zusammenhänge herleiten …
… mit Hilfe des Energieerhaltungssatzes1. Pel = U I
2. Pmech = M
3. U I = M hier werden Verluste vernachlässigt –
diese sind jedoch in elektrischen Maschinenvergleichsweise niedrig
4. … die Lorentz-Kraft M = k I
5. … hieraus folgt U = k … es ist auch möglich, diese Zusammmenhänge
aus dem Induktionsgesetz (2. Maxwell‘sche Gleichung) ( nächste Folie) herzuleiten … so ist es jedoch einfacher
Krafterzeugung in der Synchronmaschine
2
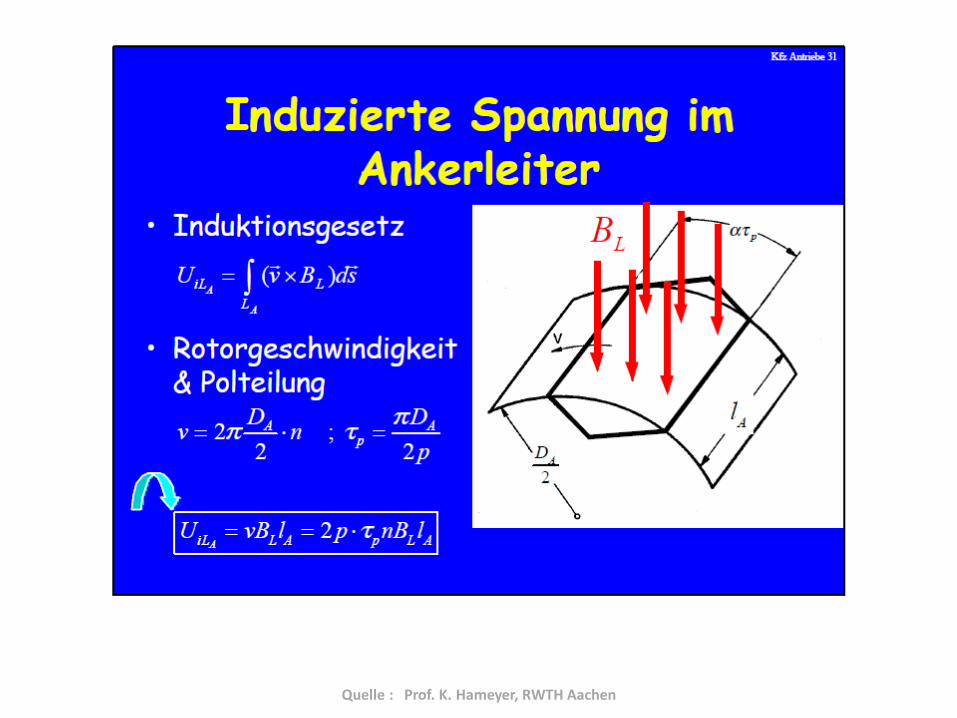
Quelle : Prof. K. Hameyer, RWTH Aachen
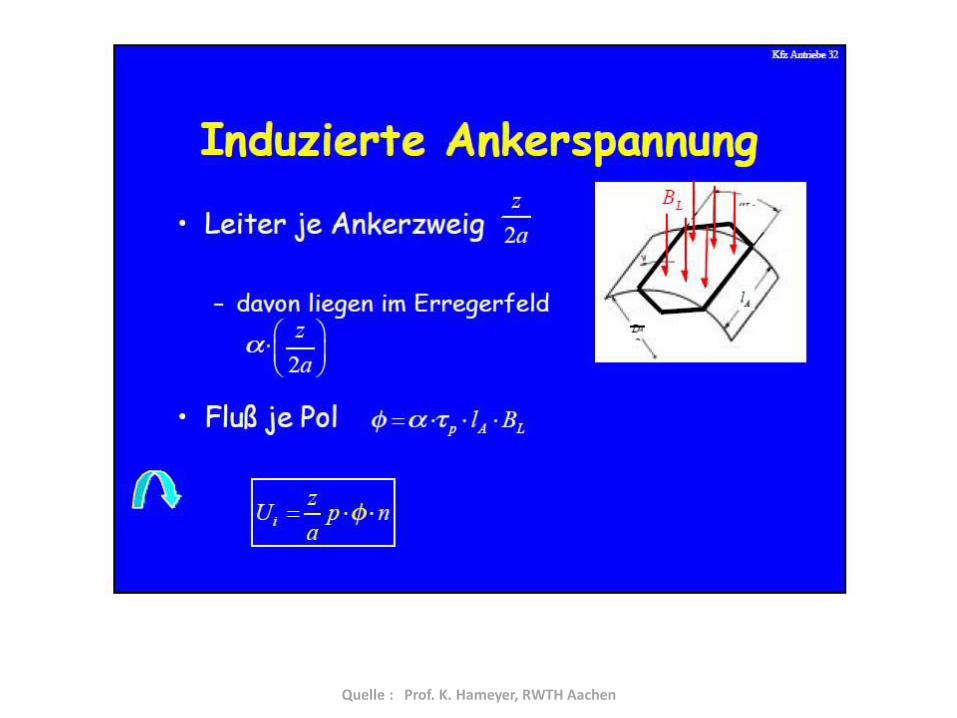
Quelle : Prof. K. Hameyer, RWTH Aachen

… jetzt fehlt noch der Zusammenhang zwischen
… M und
… U und I
M = k I
U = k
elektrisches Ersatzschaltbild
dynamische Grundgleichung
… auch Nichtspezialisten können die Zusammenhänge herleiten …
… mit Hilfe des Energieerhaltungssatzes
Krafterzeugung in der Synchronmaschine
5
M = k I
U = k
elektrisches Ersatzschaltbild
dynamische Grundgleichung M – ML = J d/dt
next slide
Krafterzeugung in der Synchronmaschine
… auch Nichtspezialisten können die Zusammenhänge herleiten …
6

Gleichstrommotor: vereinfachtes Ersatzschaltbild
Ua
Ui
Ia
Ra
Rf Lf
La
Ua / Ia / Ra / La: Ankerspannung / -strom / -widerstand /-induktivität
Rf / La : Feldwiderstand /-induktivität Ui: induzierte Spannung
If
B
Ankerstrom wird
durch
elektronische
Kommutierung
gleichgerichtet
DC
DC
Rotor (Anker) Stator
Quelle : Prof. A. Mütze, Technische Universität Graz, Österreich7

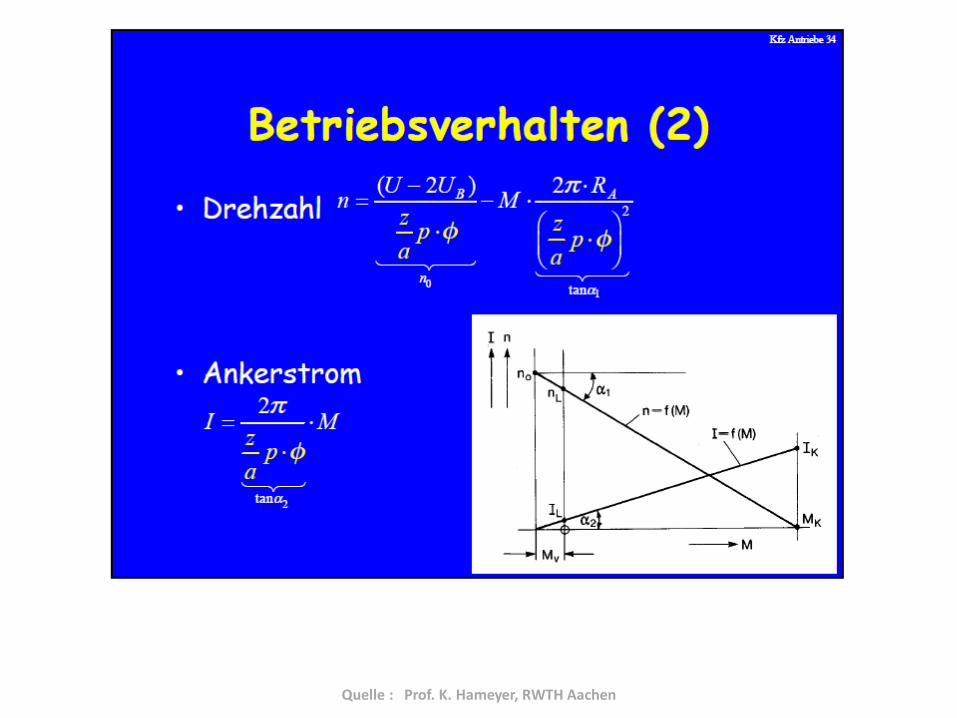
… aus diesen Gleichungen lassen sichBetriebskennlinien ableiten
M = k I
U = k
elektrisches Ersatzschaltbild
dynamische Grundgleichung M – ML = J d/dt
UA = R I + L dI/dt + U
… auch Nichtspezialisten können die Zusammenhänge herleiten …
Krafterzeugung in der Synchronmaschine
8
Quelle : Prof. K. Hameyer, RWTH Aachen
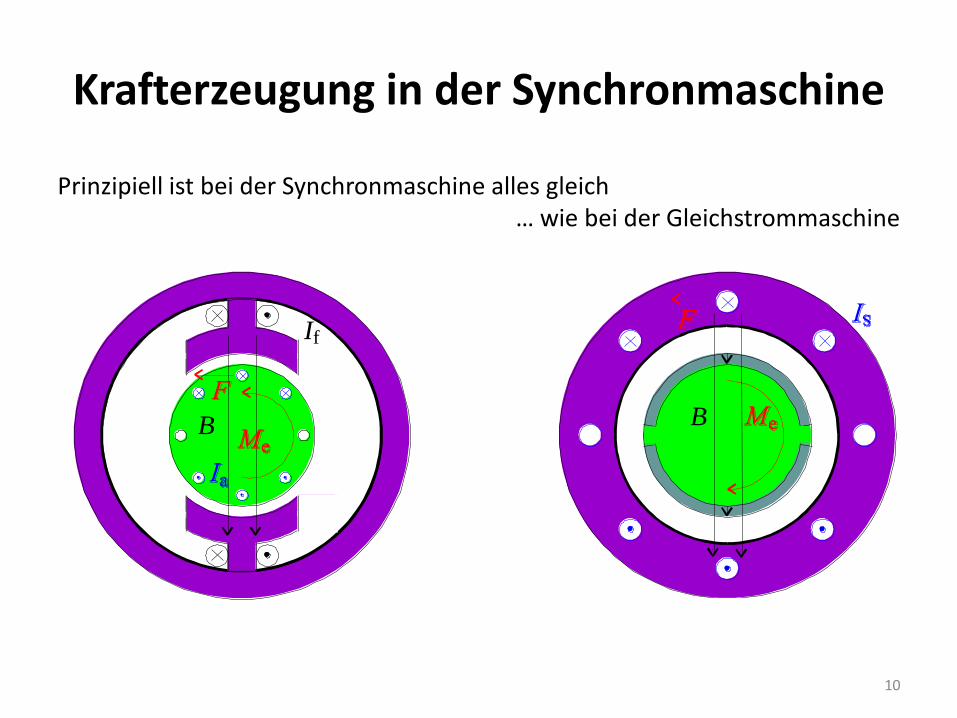
Krafterzeugung in der Synchronmaschine
Prinzipiell ist bei der Synchronmaschine alles gleich… wie bei der Gleichstrommaschine
B
If
B
10

Krafterzeugung in der Synchronmaschine
… auch bei höchsten Drehzahlen ist die Bewegung so geringdass die Maxwell‘schen Gleichungen genauso anzuwenden sind
(es gibt keine Energieabstrahlungen)
B
If
B
11

12

1313

14

1515

Krafterzeugung in der Synchronmaschine… man „sitzt“ quasi – wie das feldorientierte Koordinatensystem –
auf dem Rotor und rotiert mitsamt dem magnetischen Feld
B
If
B
… dann kann man die gleichen Gleichungenwie bei der Gleichstrommaschine verwenden
16

Synchronmaschine: Vereinfachtes Ersatzschaltbild
US / IS / RS / LS : Ständerspannung / -strom / -widerstand / - induktivität
Up: Polradspannung Uf / Rf: Feldspannung / -widerstand
US
RS
Rf
Up
IS
Uf
LS
If
DC
bzw.
Magnete
keine mechanische Gleichrichtung
Wechsel- bzw. Drehstrom
IfB
Stator Rotor
Quelle : Prof. A. Mütze, Technische Universität Graz, Österreich17
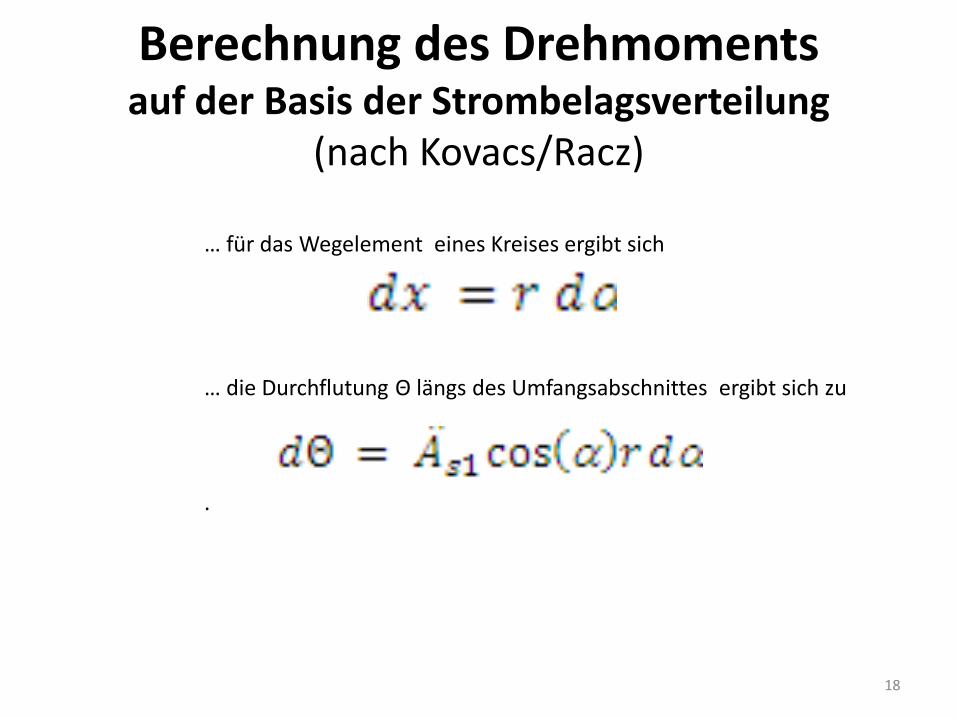
Berechnung des Drehmomentsauf der Basis der Strombelagsverteilung
(nach Kovacs/Racz)
… für das Wegelement eines Kreises ergibt sich
… die Durchflutung Θ längs des Umfangsabschnittes ergibt sich zu
.
18

Berechnung des Drehmomentsauf der Basis der Strombelagsverteilung
(nach Kovacs/Racz)Das elektrische Drehmoment ist beschreibbar als
Θ… auf jedes Stromelement wirkt die Lorentzkraft.
Setzt man voraus, dass diese Kraft tangential angreift, gilt
Das gesamte elektrische Drehmoment ergibt sich aus der Summe aller Teilmomente( = Integral) über den gesamten Statorumfang
… dieses Integral lässt sich mit Hilfe eines Additionstheorems lösen zu
r . l
19
20

21
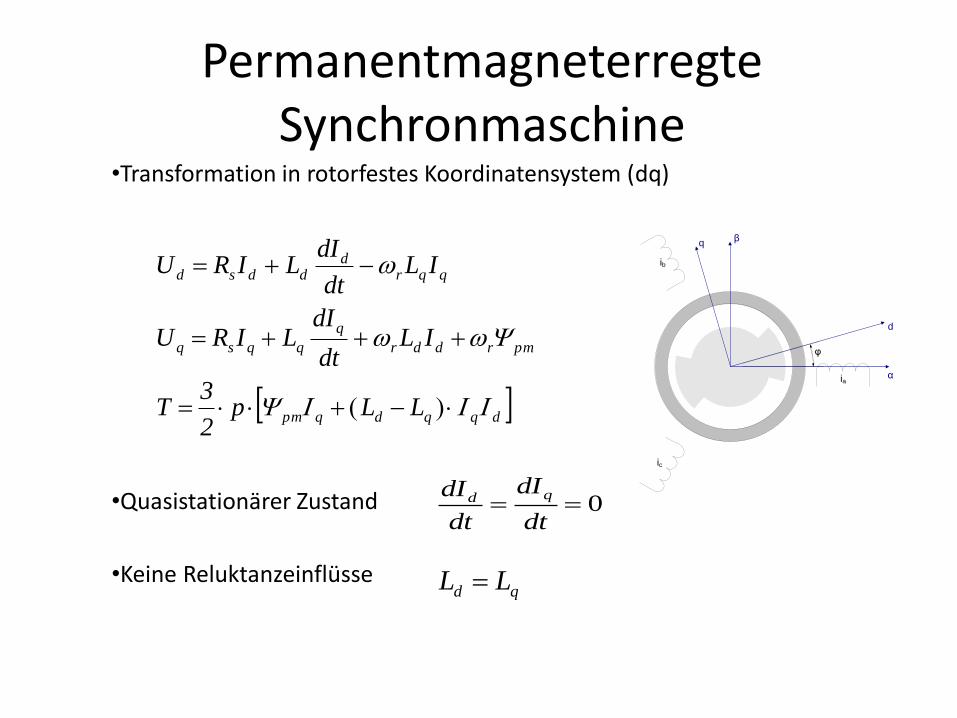
Permanentmagneterregte Synchronmaschine
•Transformation in rotorfestes Koordinatensystem (dq)
•Quasistationärer Zustand
•Keine Reluktanzeinflüsse
0dt
dI
dt
dI qd
dqqdqpm
pmrddr
q
qqsq
qqrd
ddsd
LLp2
3 T
IL dt
dIL IR U
IL dt
dIL IR U
III
ia
ib
ic
q
α
β
d
φ
qd LL

Feldschwächbetriebbei Synchronmaschoinen
Quelle : Prof. A. Binder, Technische Universität Darmstadt
Feldschwächbetriebbei Synchronmaschinen

Feldschwächbetriebbei Synchronmaschinen
N
S S
… das bedeutet, dass dasdurch die Permanentmagnete
erzeugte Felddurch ein elektrisch erregtes
Gegenfeldgeschwächt werden muss
… das ist bei oberflächenmontiertenPermanentmagneten
nicht einfach und erfordertwegen des großen Luftspalts
viel Strom
24
Feldschwächbetriebbei Synchronmaschinen
N
S S
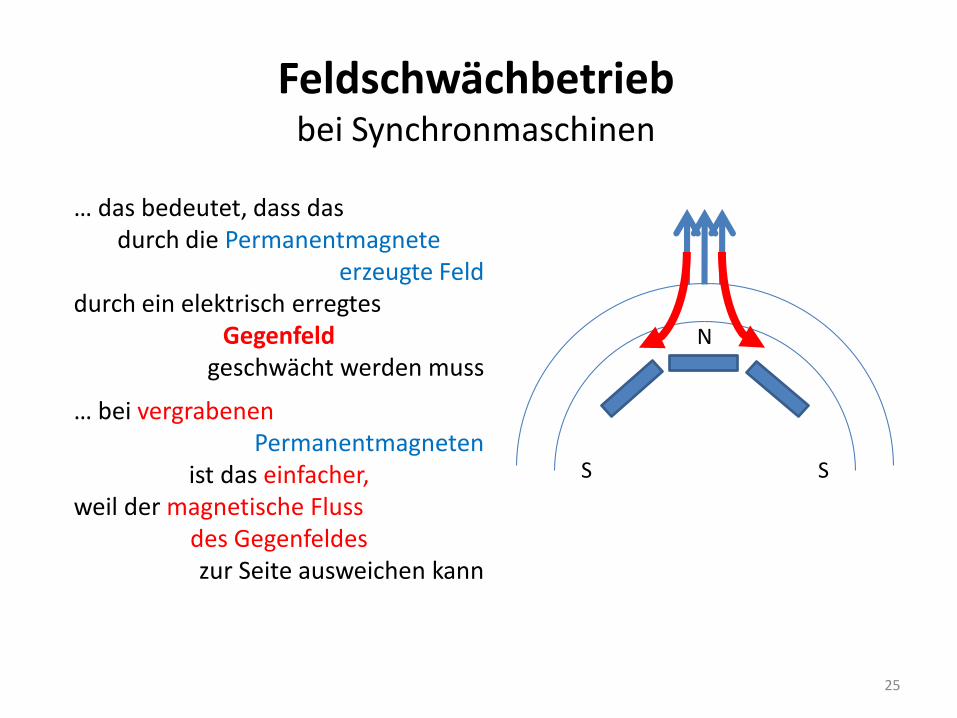
… das bedeutet, dass dasdurch die Permanentmagnete
erzeugte Felddurch ein elektrisch erregtes
Gegenfeldgeschwächt werden muss
… bei vergrabenenPermanentmagneten
ist das einfacher,weil der magnetische Fluss
des Gegenfeldeszur Seite ausweichen kann
25

Feldschwächbetriebbei Synchronmaschinen
N
S S
… das bedeutet, dass dasdurch die Permanentmagnete
erzeugte Felddurch ein elektrisch erregtes
Gegenfeldgeschwächt werden muss
… bei integriertenPermanentmagneten
ist das ebenfalls einfach,weil der magnetische Fluss
des Gegenfeldeseinen günstigen Weg findet
26
Feldschwächbetriebbei Synchronmaschinen
zu erwartende Vorteile
elektrische Maschine / Motor :
Baugröße / Gewicht :– richtet sich nach dem Drehmoment
kein Vorteil !!!
Wirkungsgrad :– hängt von der Auslegung ab
nicht unbedingt ein Vorteil !!!… das Wechselspiel zwischen Fahrzyklus und Energieverbrauch
ist ohnehin schwer einzuschätzen … wenn überhaupt, dann im Prozentbereich
27

Feldschwächbetriebbei Synchronmaschinen
zu erwartende Vorteile
Stromrichter :
Baugröße / Gewicht :– richtet sich nach dem Strom (der ist kleiner !)
Vorteil ! … aber : Stromrichter haben kein Eisen … … nur ein kleiner Vorteil
… wäre ein höherer Motorstrom wirklich ein Problem ?
Wirkungsgrad :… höherer Motorstrom heißt nicht höherer Batteriestrom …
… der Batteriestrom richtet sich in jedem Fall nach der Motorleistung … eigentlich spielt die Auslegung der Motorwicklung keine Rolle
28

Feldschwächbetriebbei Synchronmaschinen
zu erwartende Vorteile
Stromrichter :
Baugröße / Gewicht :– richtet sich nach dem Strom (der ist kleiner !)
Vorteil ! … aber : Stromrichter haben kein Eisen … … nur ein kleiner Vorteil
… wäre ein höherer Motorstrom wirklich ein Problem ?
Wirkungsgrad : Vorteil (höherer Modulationsgrad)!
… das Wechselspiel zwischen Fahrzyklus und Energieverbrauch ist trotzdem schwer einzuschätzen
… wenn überhaupt, dann im Prozentbereich 29
Feldschwächbetriebbei Synchronmaschinen
zu erwartende Nachteile
Abschaltung bzw. Fehlerfall bei hoher Drehzahl :
Gegenmaßnahmen :Motorauslegung (niedriger „Kurzschlussstrom“)
… aber : Auswirkung für den „Normal“betrieb ???
… volle Gegenspannung (EMK) an den Motorklemmen :
Gefahr für die Leistungselektronikund evtl. die Motorwicklung !
elektronisch („Notbetrieb“ bzw. „künstlicher Kurzschluss“) … aber : muss sehr zuverlässig sein !!!
30
Feldschwächbetriebbei Synchronmaschinen
Frage, die man sich– bei der Auslegung (!) –
ernsthaft stellen muss:
… brauche ich den Feldschwächbereich wirklich ???
… oder will ich nur die Mechanik nicht ändern ???(„gewohntes“ Verhalten eines Schaltgetriebes)
31

„(Synchron-) Reluktanzmotoren“

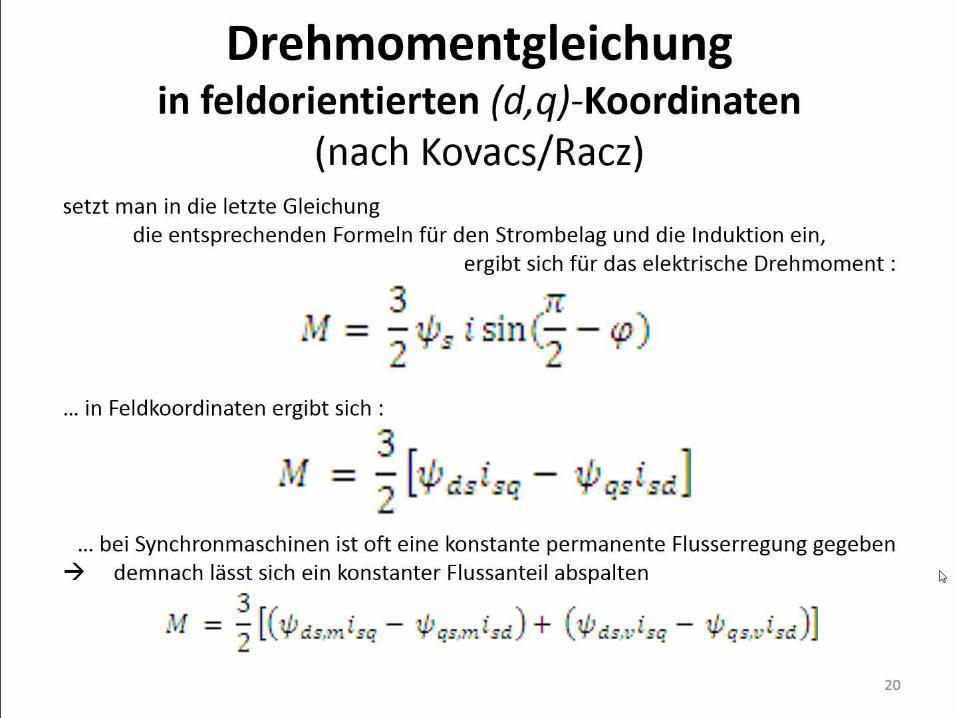
Drehmomentgleichungin feldorientierten (d,q)-Koordinaten
(nach Kovacs/Racz)setzt man in die letzte Gleichung
die entsprechenden Formeln für den Strombelag und die Induktion ein,ergibt sich für das elektrische Drehmoment :
… in Feldkoordinaten ergibt sich :
… bei Synchronmaschinen ist oft eine konstante permanente Flusserregung gegeben demnach lässt sich ein konstanter Flussanteil abspalten
Reluktanz-Drehmoment„elektrisches“ Drehmoment33

Synchronreluktanzmaschine: Drehmomententstehung
Rm klein
Rm groß
Rm klein
Rm groß
Reluktanz = magnetischer Widerstand
Stator
Quelle : Prof. A. Mütze, Technische Universität Graz, Österreich
Rm klein
Rm groß
Rotor
34

Quelle : Prof. A. Binder, Technische Universität Darmstadt
Reluktanzmaschineder grundlegende physikalische Effekt

Quelle : Prof. A. Binder, Technische Universität Darmstadt
Reluktanzmaschineder grundlegende physikalische Effekt
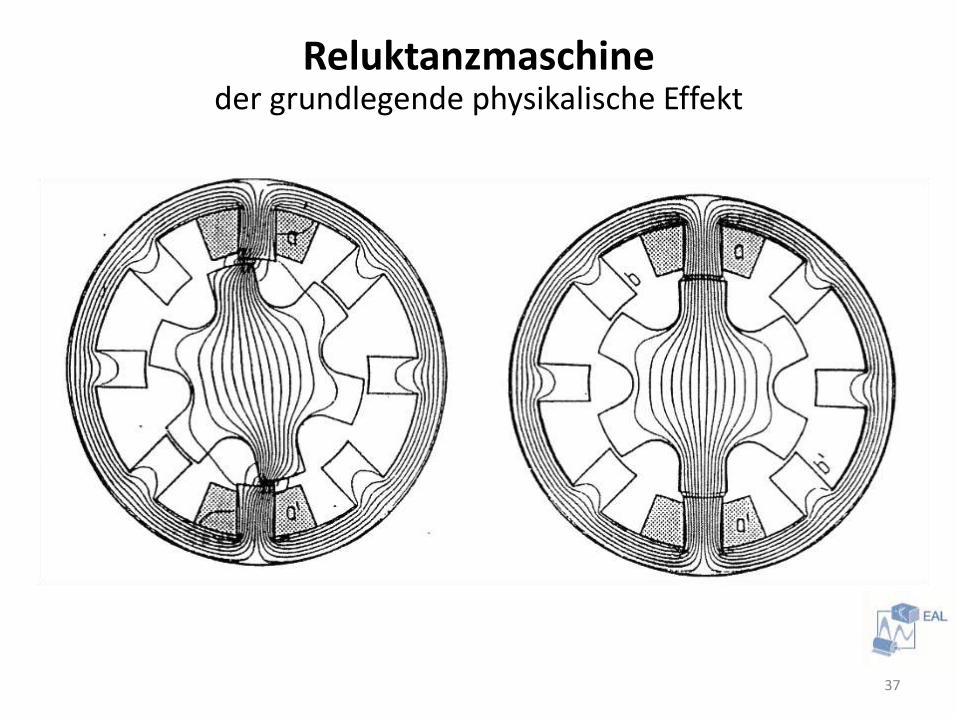
37
Reluktanzmaschineder grundlegende physikalische Effekt

12-8 SRM with Fully Pitched Windings (Motor A)
(Rated for 600V d.c. link, 25Nm)
Source : Prof. Alan Jack – University of Newcastle upon Tyne38

Reluctance Motors
• Invented in 1820’s
not really any use until transistors in 1948
• Switched reluctance motors
same in principle as stepping motors
they are not new this is just marketing hype!
• The motor of choice for small indexing drives
e.g. CD/DVD track drive
Source : Prof. Alan Jack – University of Newcastle upon Tyne39

6/4 motor running, one phase excited after another

Needs power electronics to run - typical circuit, current is delivered in unidirectional pulses.
Doubly salient therefore no transformation is very useful, best way to model is via phase variables:-
etcv
dt
dRiv
dt
dRiv
3
2222
1111
Mutual inductance is usually small enough to ignore
1 1 1
2 2 2
L i
L i
T idL
di
dL
detc
1
2
1
21
2 1
2
2 2
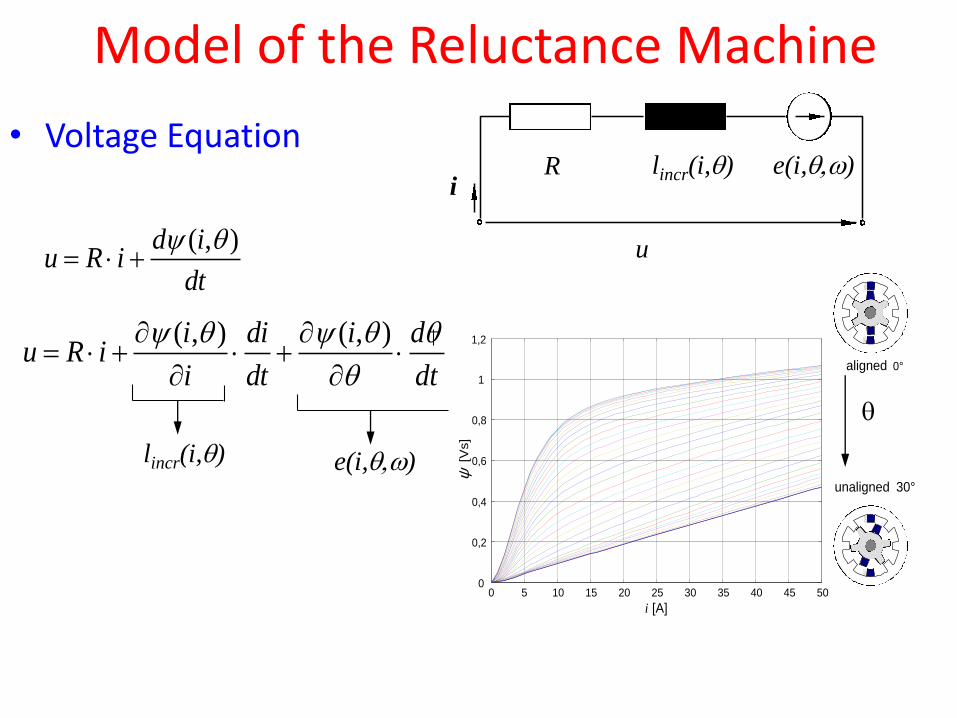
Model of the Reluctance Machine
• Voltage Equation
( , )d iu R i
dt
( , ) ( , )i di i du R i
i dt dt
Ri
lincr(i,) e(i,,)
u
lincr(i,) e(i,,)
0 5 10 15 20 25 30 35 40 45 500
0,2
0,4
0,6
0,8
1
i [A]
y
[Vs]
1,2
aligned 0°
+
+++++
+++++
+++++
++
++++
++++
+++++
unaligned 30°
+
+++++
+++++
+++++
++
++++
++++
+++++
0 5 10 15 20 25 30 35 40 45 500
0,2
0,4
0,6
0,8
1
i [A]
y
[Vs]
1,2
aligned 0°
+
+++++
+++++
+++++
++
++++
++++
+++++
unaligned 30°
+
+++++
+++++
+++++
++
++++
++++
+++++
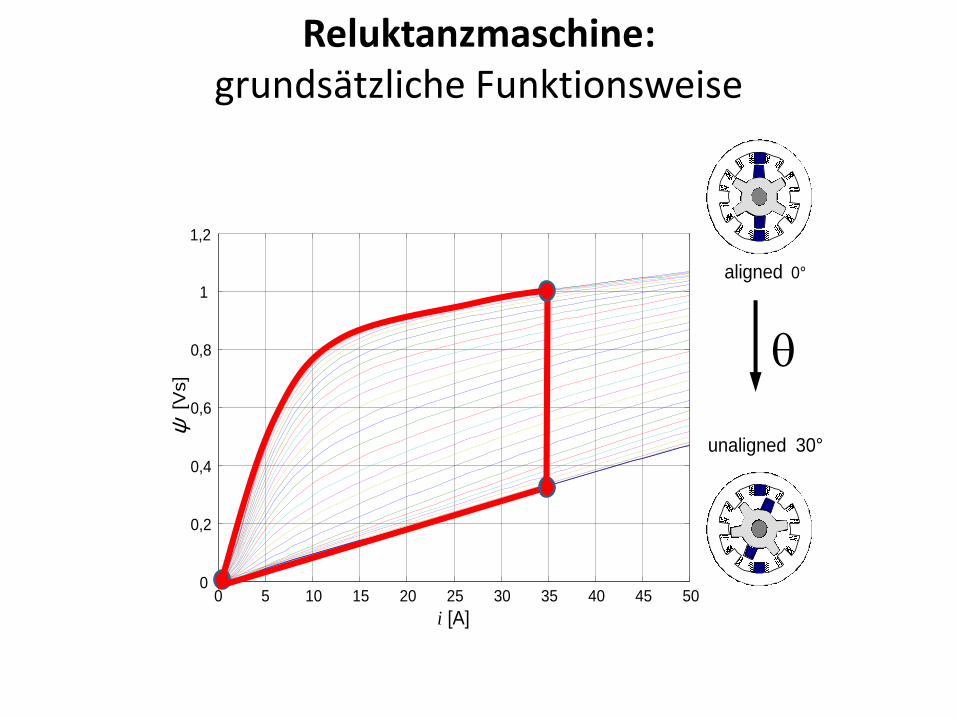
Reluktanzmaschine: grundsätzliche Funktionsweise

e.g. 6-4 45o = unalligned, 0o = alligned , low speed 35o to 5o
0
0
high speed 45o or even 60o to 15o , High speed - inductance delays current rise
and fall
-30 -20 -10 0 10 20 30 40
rotor angle
ph
ase c
urr
en
t

Phase Current (A)
Flux linkage (Wb)
i
Low speed, average torque/phase =
shaded area/turn on angle
Phase Current (A)
Flux linkage (Wb)
i
High speed, average torque/phase =
shaded area/turn on angle
Locii of current
Torque tends to ripple, worse at high torque and/or high speed.
Tends to be noisy since field pulses on and off - stator is sucked
towards rotor and then released.

-0.004
-0.003
-0.002
-0.001
0
0.001
0.002
0.003
0.004
0.005
0.006
0 500 1000 1500 2000 2500 3000 3500
Phase MMF (A)
Flu
x p
er t
urn
(W
b)
PM brushless d.c. 12-8 segmental SRMconventional 12-8 SRM12-10 segmental SRM
-0.004
-0.003
-0.002
-0.001
0
0.001
0.002
0.003
0.004
0.005
0.006
0 500 1000 1500 2000 2500 3000 3500
Phase MMF (A)
Flu
x p
er t
urn
(W
b)
PM brushless d.c. 12-8 segmental SRMconventional 12-8 SRM12-10 segmental SRM
-0.004
-0.003
-0.002
-0.001
0
0.001
0.002
0.003
0.004
0.005
0.006
0 500 1000 1500 2000 2500 3000 3500
Phase MMF (A)
Flu
x p
er t
urn
(W
b)
PM brushless d.c. 12-8 segmental SRMconventional 12-8 SRM12-10 segmental SRM
-0.004
-0.003
-0.002
-0.001
0
0.001
0.002
0.003
0.004
0.005
0.006
0 500 1000 1500 2000 2500 3000 3500
Phase MMF (A)
Flu
x p
er t
urn
(W
b)
PM brushless d.c. 12-8 segmental SRMconventional 12-8 SRM12-10 segmental SRM
Source : Prof. Alan Jack – University of Newcastle upon Tyne46

Torque = change of stored energy with position at constant
current = rate of change of co-energy with position
Phase Current (A) Rotor Position (rad)
Torque (Nm)Flux (Wb)
i
i
Torque/phase not constant
Source : Prof. Alan Jack – University of Newcastle upon Tyne
Reluktanzmaschine: grundsätzliche Funktionsweise
47
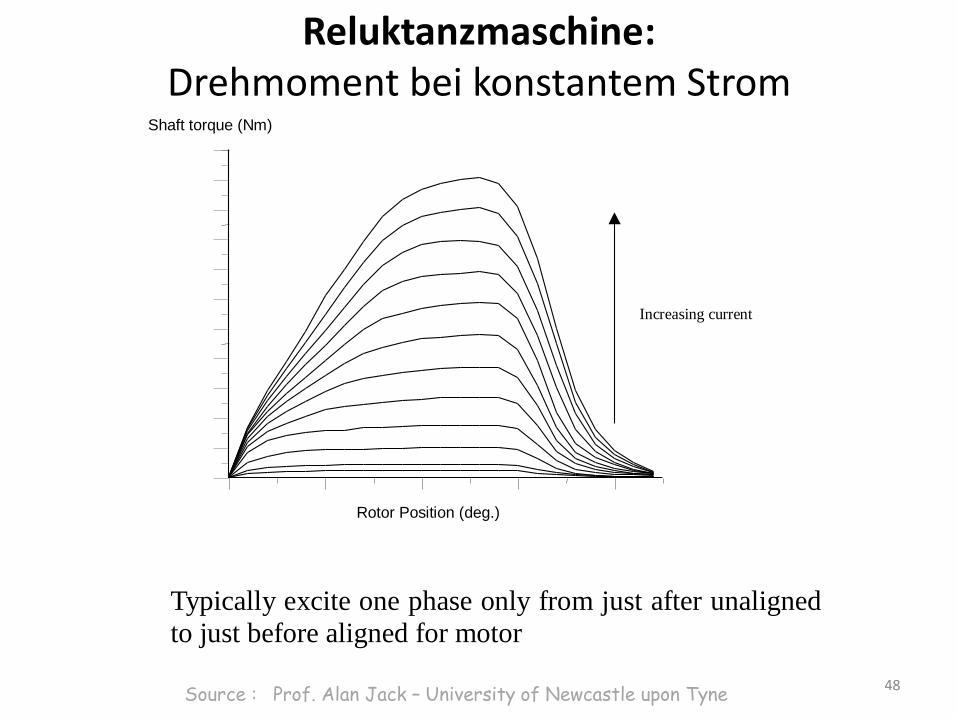
Typically excite one phase only from just after unaligned
to just before aligned for motor
Rotor Position (deg.)
Shaft torque (Nm)
Increasing current
Source : Prof. Alan Jack – University of Newcastle upon Tyne
Reluktanzmaschine: Drehmoment bei konstantem Strom
48
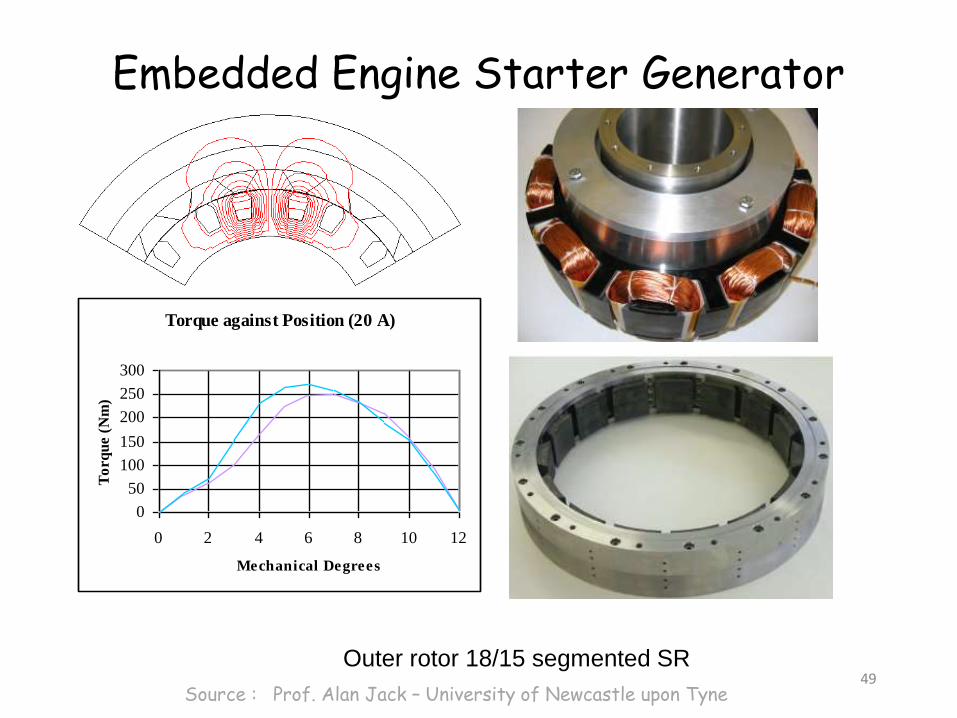
Embedded Engine Starter Generator
Outer rotor 18/15 segmented SR
Torque against Position (20 A)
0
50
100
150
200
250
300
0 2 4 6 8 10 12
Mechanical Degrees
To
rq
ue (
Nm
)
Source : Prof. Alan Jack – University of Newcastle upon Tyne49

3 Phase 12-8 Segmental Machinewith Fully Pitched Windings
•Phase self inductance varies with rotor position.
•Minimal mutual inductance between phases

3 Phase 12-8 Segmental SRM with Fully Pitched Windings
UnalignedAligned
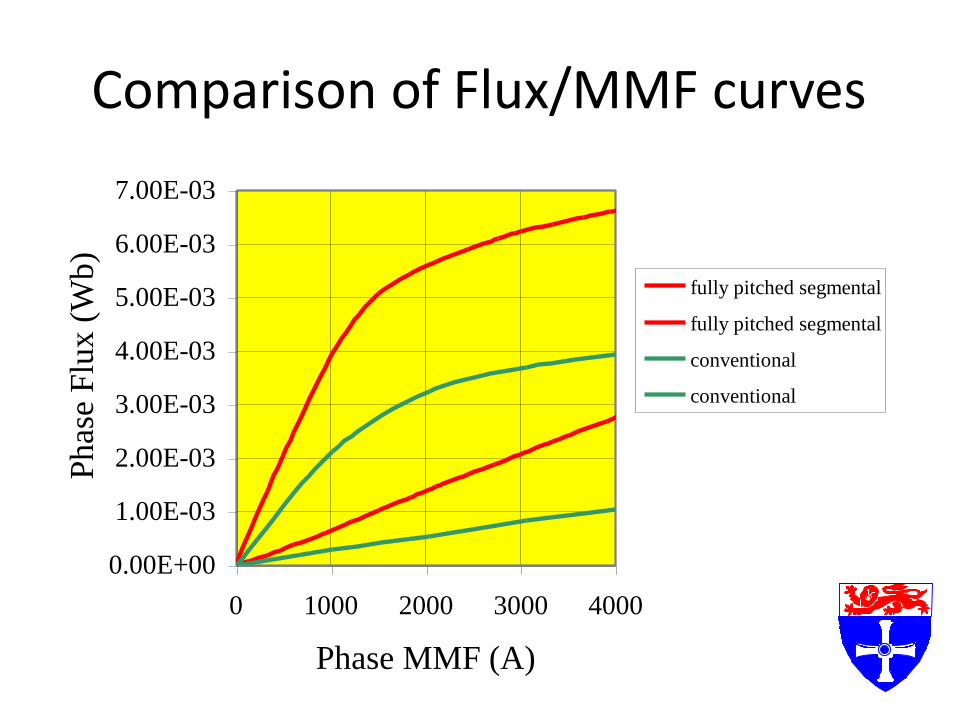
Comparison of Flux/MMF curves
0.00E+00
1.00E-03
2.00E-03
3.00E-03
4.00E-03
5.00E-03
6.00E-03
7.00E-03
0 1000 2000 3000 4000
Phase MMF (A)
Ph
ase
Flu
x (
Wb
)
fully pitched segmental
fully pitched segmental
conventional
conventional

Ratio of tooth to slot width can be much larger – more flux, same mmf = higher torquet/λ < 0.5 in normal SRMt/λ ~ 0.7 segmented
+ -
+-
Version 1 fully pitched winding
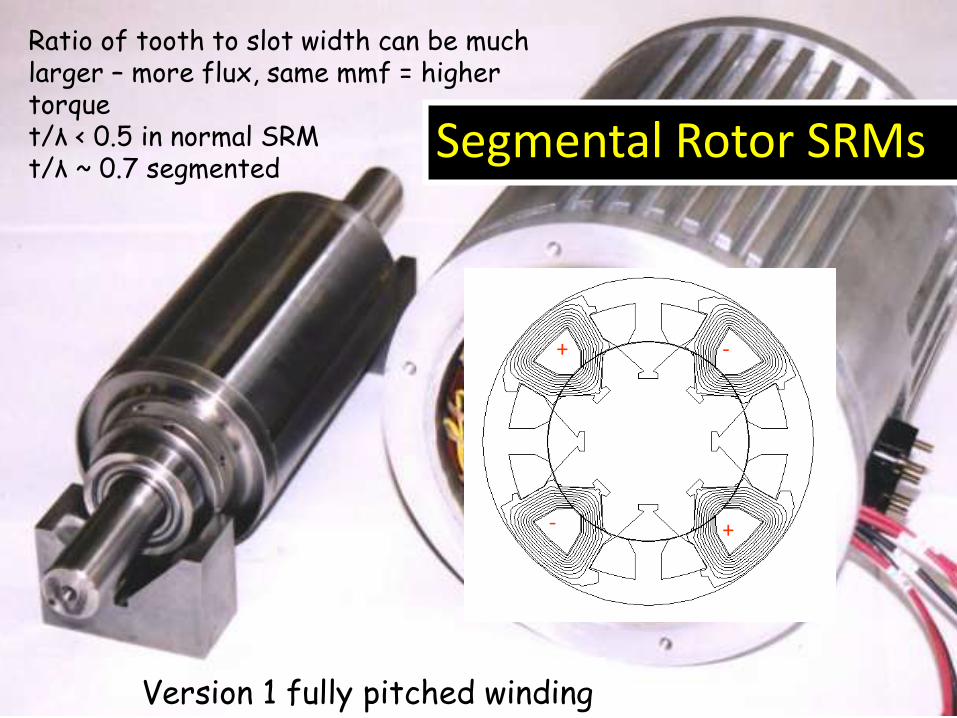
Segmental Rotor SRMs
Ratio of tooth to slot width can be much larger – more flux, same mmf = higher torquet/λ < 0.5 in normal SRMt/λ ~ 0.7 segmented
+ -
+-
Version 1 fully pitched winding

Low Voltage 12-8 SRM with Fully Pitched Windings (Motor B)
(12V d.c. link, 9Nm)
Reluktanzmaschine: Umrichterspeisung
Braucht man in jedem Fall einen speziellen Umrichter ?
56

THE USE OF THREE PHASE BRIDGE INVERTERS WITH SWITCHED RELUCTANCE DRIVES
• Supply current ir, is and it are alternating
• Phase currents are pulses as normal for SRM
• Effectively dc circulates around the delta
Source : Prof. Alan Jack – University of Newcastle upon Tyne57

Reluktanzmaschine: Umrichterspeisung
Braucht man in jedem Fall einen speziellen Umrichter ?
Nachteil : … nur eine Drehrichtung möglich !!!
58

Reluctance Machines
• Cheap (no magnets)• Brushless - long life• high speed ok (no rotor windings or magnets)• fault tolerant• Noisy ?• torque ripple• non-standard inverter?• more motor connections?• market has low experience
Source : Prof. Alan Jack – University of Newcastle upon Tyne59
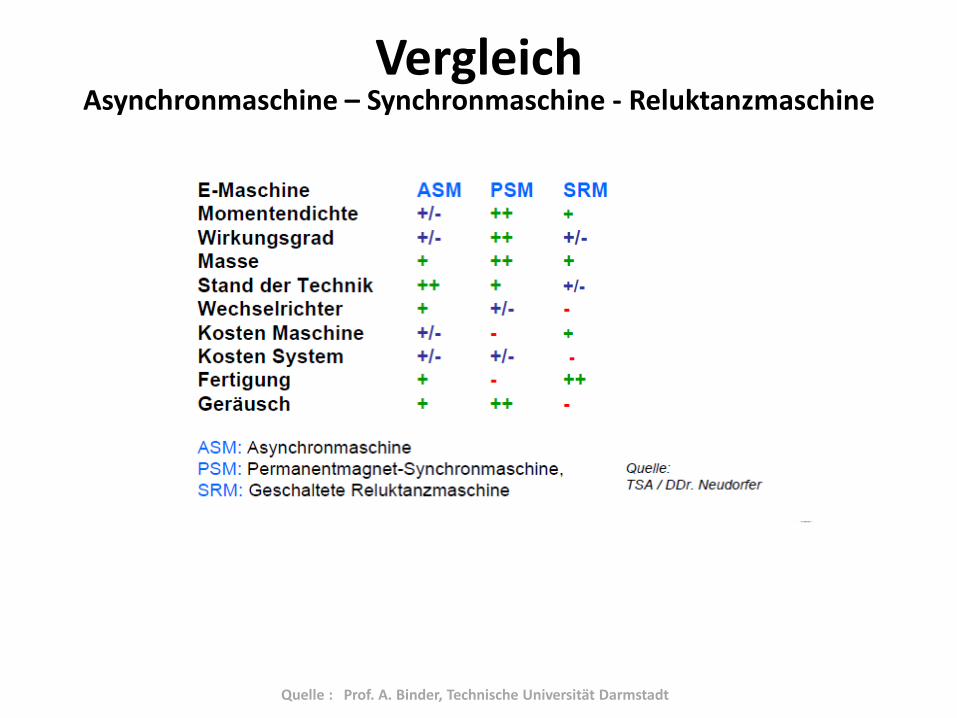
Quelle : Prof. A. Binder, Technische Universität Darmstadt
VergleichAsynchronmaschine – Synchronmaschine - Reluktanzmaschine