generalidades y lenguajes de programacion robotica
TRANSCRIPT

GENERALIDADES LA ROBOTICALa robótica es una rama de la tecnología, queestudia el diseño y construcción de máquinascapaces de desempeñar tareas repetitivas, tareasen las que se necesita una alta precisión, tareaspeligrosas para el ser humano o tareasirrealizables sin intervención de una máquina.Las ciencias y tecnologías de las que derivapodrían ser: el álgebra, los autómatasprogramables, las máquinas de estados, lamecánica, la electrónica y la informática.
GENERALIDADES LA ROBOTICATal vez sea uno de los mejores y más avanzadosinventos de la tecnología y la ciencia. Pues es unamáquina que funciona como al antojo y necesidadesdel hombre comportándose como una extensión dela mayoría de sus funciones y habilidadeskinestésicas, lo que le permite consolidarse comouno de los inventos más impactantes del mundo.Aunque su uso es poco expandido, los robotstienden a convertirse en un objeto común debido aque realiza las funciones que el hombre puede y lasque no puede también, reduciendo los índices depeligrosidad y mortalidad en trabajos de alto riesgo.
LENGUAJES DE PTOGRAMACION PARA ROBOTICA
¿Qué es un lenguaje de programación?
• Es un lenguaje formal diseñado para expresar procesosque pueden ser llevados a cabo por máquinas.
• Controlar el comportamiento físico y lógico de unamáquina, para expresar algoritmos con precisión, o comomodo de comunicación humana.
Tipos de Lenguajes de Programación
Nivel Bajo. Reducida abstracción entre el lenguaje yel hardware directa.
Nivel Medio. Tienen ciertas características que losacercan a los lenguajes de bajo, pero no lo son.
Nivel Alto. Son normalmente fáciles de aprenderporque están formados por elementos de lenguajesnaturales, como el inglés.
Clasificación de Lenguajes de Programación en Robótica
La programación empleada en Robótica puede tener uncarácter:
Explícito: El operador es el responsable de lasacciones de control y de las instrucciones adecuadasque las implementan.
Implícito: Estar basada en la modelación del mundoexterior, cuando se describe la tarea y el entorno y elpropio sistema toma las decisiones.
Características Básicas de un Lenguaje de Programación Ideal
Lenguaje: GRL Para programar grandes sistemas de control modulares.
Provee rango de constructores más extenso para definirflujos de comunicación y restricciones de sincronizaciónentre diferentes módulos.
Usa autómatas finitos como bloques básicos deconstrucción.
Lenguaje: Golog Permite razonamiento y aprendizaje para un robot.
Mezcla resolución deliberativa de problemas(planificación) y la especificación directa de controlreactivo.
Lenguaje: VAL Diseñado para robots UNIMATE PUMA en 1979 porADEPT.
Da énfasis en movimientos primitivos (coordenadasarticulares o cartesianas).
Posee aumento de operaciones con sensores pococomplejos.
Mantiene pocas posibilidades a programación offliney de comunicarse con otras computadoras.
Incapacidad de realizar cálculos aritméticos complejospara su uso en ejecución de programa.
Lenguaje: V+ Mejora al lenguaje Val II, entra en categoría desegunda generación de lenguajes de programación derobots industriales.
En la actualidad se usa en marcas de robotsindustriales ADEPT y Stäubli como Rx90.
Tiene comandos como: abort, call, case, do, for,if…goto, if…then, lock, pause, return, stop, wait,
Funciones lógicas como: false, true, on, off y otras detipo numéricos y tipo string.
Ventajas del Lenguaje V+
Proporciona buena documentación, diseño ordenado ycoherente del programa.
Se pueden mejorar, ampliar y modificar con pocoesfuerzo y añadir nuevos periféricos, redes, etc.
Se pueden desarrollar en computadoras y luegointroducirlo en el controlador.
Los programas pueden ser escritos offline.
Se puede ejecutar los diferentes programas al mismotiempo.
Lenguaje: AL
Trata de proporcionar definiciones acerca de losmovimientos relacionados con los elementos sobre losque el brazo trabaja. Fue diseñado por el laboratorio deInteligencia Artificial de la Universidad de Stanford,con estructuras de bloques y de control similares alALGOL, lenguaje en el que se escribió.
Está dedicado al manipulador de Stanford, utilizandocomo procesadores centrales, a un PDP 11/45 y un PDPKL-10.
Lenguaje: MCL
Lo creó la compañía MC DONALL DOUGLAS, comoampliación de su lenguaje de control numérico APT.Es un lenguaje compilable que se puede considerarapto para la programación de robots "off-line".
Robot SATURN
Lenguaje: TRIPS
Fue diseñado, para el robot móvil SHAKEY. Se basa enun modelo del universo ligado a un conjunto deplanteamientos aritmético lógicos que se encargan deobtener las subrutinas que conforman el programafinal.
Lenguaje: RLC
Lenguaje: RLC • Aplicado al robot PACS y desarrolladopor RPI, emplea, como CPU, un PDP 11/03. Es del tipointérprete y está escrito en Ensamblador.
Lenguaje: RPL
Lenguaje: RPL • Dotado con un LSI-II comoprocesador central, y aplicado a los robots PUMA, hasido diseñado por SRI INTERNATIONAL.
Lenguaje: PBASIC Lenguaje: PBASIC • Basado del lenguaje BASIC, fuedesarrollado por Parallax, Inc para su uso en losmicrocontroladores creados por la compañía. •Después de escribir el código, se carga en el EEPROMdel microcontrolador.
Ejemplo del Lenguaje PBASIC
Lenguaje: RAIL
Lenguaje de alto nivel desarrollado por Automatix Incen 1981 para el control de los sistemas Cybervision,Autovision, y Robovision.
Ventajas del Lenguaje RAIL
Lenguaje de programación de alto nivel.
Ofrece comandos y parámetros para soldar.
Comandos para acercamiento y alejamiento de unrobot en movimiento.
Permite al robot usar interfaz externa.
Expresiones comparativa, aritmética y lógica. • Etc.
Lenguaje: ROBOTC Lenguaje: ROBOTC • Es un lenguaje de programaciónpara el desarrollo de robótica educativa y concursos.ROBOT C es un lenguaje de programación basado enC, con un entorno de desarrollo fácil de usar.

Aplicaciones del Lenguaje ROBOTC
Lenguaje: URBI Lenguaje: URBI • El desarrollo de aplicaciones en loscampos de la robótica y los sistemas complejos.
Urbi se compone de una arquitectura de componentesC++ distribuidos llamada UObject y de urbiscript, unlenguaje interpretado, concurrente y dirigido poreventos.
Aplicación

Lenguaje: Maple
Escrito, como interprete, en lenguaje pl-1, por IBMpara el robot de la misma empresa, tiene capacidadpara soportar informaciones de sensores externos.Utiliza como CPU a un IBM370/ 145 SYSTEM 7.
Assembly o Lenguaje Ensamblador
Assembly o Lenguaje Ensamblador • Es un lenguaje deprogramación de bajo nivel, implementa unarepresentación simbólica de los códigos de máquinabinarios y otras constantes necesarias para programaruna arquitectura dada de CPU.
Lenguaje: LAMA Lenguaje: LAMA • Procede del laboratorio deInteligencia Artificial del MIT, para el robot SILVER,orientándose hacia el ajuste de conjuntos mecánicos.
Lenguaje: ANORAD Lenguaje: ANORAD • Se trata de una transformaciónde un lenguaje de control numeración de la casaANORAD CORPORATION, utilizado para robotANOMATIC. Utiliza como procesador, almicroprocesador 68000 de Motorola de 16/32 bits
Lenguaje: RAPID Lenguaje: RAPID • Creado en 1994 por ABB, presentauna funcionalidad que aparece en otros lenguajes deprogramación de alto nivel, ha sido diseñadoespecialmente para controlar robots.
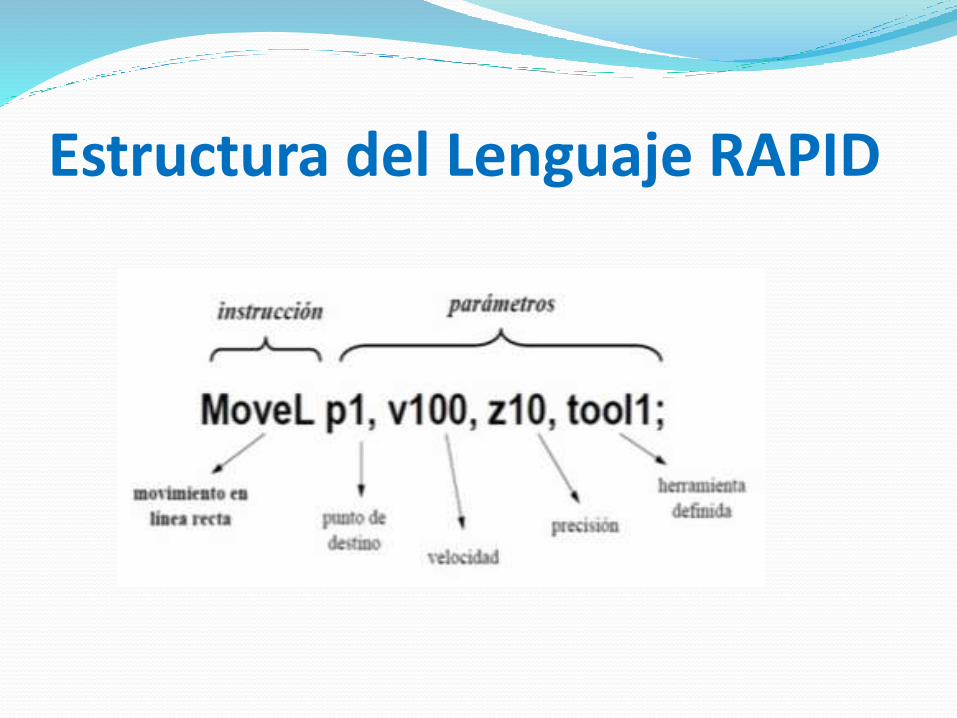
Estructura del Lenguaje RAPID
Realizado por Milton Lalangui,estudiante de la UniversidadTecnológica Indoamericana de lafacultad de Ingeniería en sistemasde la materia de Robótica.
Gracias por su amable atención