géométrie différentielle élémentaire pour la physique-mostafa bousder
TRANSCRIPT

Géométrie différentielle
élémentaire pour la physique
Mostafa Bousder

1
2017
Géométrie différentielle élémentaire
Pour la physique
Auteur : Mostafa Bousder
LPHE-MS
Faculté des sciences Rabat

2

3
Introduction
L’objective première de ce cours est d’introduire les notions de la géométrie
différentielle à fin d’attaquer les mathématiques de la relativité générale.
La géométrie différentielle est une grande partie dans les mathématiques et
aussi plus riche par des outilles mathématique et c’est elle qui nous permet de
relier l’Algèbre par la géométrie en une géométrie algébrique, calcul différentiel
avec topologie générale et la géométrie avec la physique et plusieurs d’autres
choses.
La géométrie différentielle est l'application des outils du calcul différentiel pour
étudier la géométrie. Les objets d'étude de base sont les variétés différentielles,
La géométrie différentielle trouve sa principale application dans la physique
surtout dans la relativité générale où elle permet de modéliser des courbures de
l'espace-temps causent par la présence d’une masse énorme.
L’objectif deuxième ce de ce cours est d’introduire le cadre mathématique de
la relativité générale. On privilégie une approche géométrique et picturale basée
sur l’algèbre linéaire à une approche basée sur les systèmes de coordonnées.
Nous allons traiter quatre grandes parties de la géométrie :
1. Variétés différentiables :
2. Les espaces tangents et cotangent
3. Les formes différentielles
4. La géométrie riemannienne
C’est 4 parties sont parfaitement relier,

4
Sommaire réduite
1- Notions fondamentale -pg.8
2- Variétés différentiables -pg.14
3- Espaces tangents aux variétés -pg.34
4- Formes différentielles -pg.46
5- La géométrie Riemannienne -pg.71
6- Bibliographie.
Sommaire
Chapitre 1
Notions fondamentales…………………………………......8
1.1. Ensembles…………………………………………………………..8
1.2. Matrices……………………………………………………………..8
1.3. Espace et le dual…………………………………………………...9
1.4. Application……………………………………………………….…9
1.5. Produit tensoriel……………………………………………….…..10
1.6. Indice de sommation …………………………………………......10
1.7. Généralité ………………………………………………………….11
Schéma générale de travaille……………………………..…..13
Chapitre 2
Variétés différentiables …………………………………….14
2.1. Introduction………………………………………………………..14
2.2. Notion d’espace topologique……………………………………..15
2.3. Notion de la carte…………………………………………………16
2.4. Notion d’Atlas 𝐴…………………………………………………..16
2.5. Application difféomorphisme …………………………………..16
2.6. Variété différentiable…………………………………………….17
2.6.1 Notion de la variété différentiable……………………………17
2.6.2 Formes composées de des application………………………..18

5
2.6.3 Produit de deux variétés différentiables………………….……20
2.7. Paramétrisation locale………………………………………….….20
2.7.1 Définition……………………………………………………….…..20
2.7.2 Définition……………………………………………………….…..21
2.8 Etude de la sphère : comme une variété différentielle………...21
2.9 Etude de plan projectif………………………………………….….22
2.10 Variété complexe…………………………………………………..24
2.10.1 Introduction sur Variété complexe…………………………...24
2.10.2 Fibration de Hopf……………………………………………….24
2.10.3 Tore……………………………………………………………….27
2.11 bouteille de Klein ………………………………………………...28
2.12 Théorèmes (à monter)……………………………………………28
Exercices corrigés……………………………………………………….30
Exemples des variétés………………………………………………….33
Chapitre 3
Espaces tangents et cotangent aux variétés…………….34
3.1 Fibré tangent et Fibré cotangent…………………………….…..34
3.1.1 Définition………………………………………………………….34
3.1.2 Espace tangent et Espace cotangent………………………….34
3.1.3 Application tangente…………………………………………….35
3.1.3.1 Définition………………………………………………………..35
3.1.3.1 Propriétés……………………………………………………….35
3.2 Champs de vecteurs…………………………………………….….35
3.2.1 Définition………………………………………………………….35
3.2.2 Lois de transformation………………………………………….37
3.2.3 Espace tangent muni d’un crochet de Lie…………………...38

6
3.3 Groupe………………………………………………………………...40
3.3.1 Groupe de Lie……………………………………………………...40
3.3.2 Groupe avec un paramètre………………………………………41
3.3.2.1 Définition………………………………………………………...41
3.4 Applications des champs…………………………………………..42
3.4.1 Pull back et push forward de 𝜙…………………………………42
3.4.2 Flots………………………………………………………………...43
3.4.3 Dérivée de Lie……………………………………………………..44
Exercices ………...……………………………………………………….45
Chapitre 4
Formes différentielles……………………………………….46
4.1 p-forme différentielle………………………………………………47
4.2 Base de calculs des formes différentielles……………………...47
4.2.1 une seule itération Λ𝑝……………………………………………47
4.2.2 deux itérations Λ𝑝 × Λ𝑞………………………………………….48
4.2.3 l’annihilation extérieure………………………………………..49
4.3 Diagrammes de géo-formes……………………………………….50
4.3.1 Proposition………………………………………………………..50
4.3.2 Diagrammes de géo-formes…………………………………….51
4.4 Produit intérieur…………………………………………………...53
4.5 Dérivée extérieure…………………………………………………54
4.6. Opérateur de Hodge………………………………………………57
4.7 Variété orientable………………………………………………….60
4.8 Intégration des formes différentielles…………………………..61
4.8.1 Pull back des Formes différentielles …………………………61
4.8.2 Intégration des 1-formes différentielles……………………...61

7
4.8.3 Intégration volumique des formes différentielles……………62
4.9 formes différentielles exactes et fermées………………………..63
4.9.1 Définition : 𝜔 exacte……………………………………………...63
4.9.2 Définition : 𝜔 fermée……………………………………………..63
4.9.3 Proposition…………………………………………………………63
Exercices corrigés……………………………………………................65
Chapitre 5
La géométrie Riemannienne……………………………….71
4.1 Introduction…………………………………………………………71
4.2 Métrique……………………………………………………………..71
4.3 Connexion …………………………………………………………..74
4.4 La courbure………………………………………………………….76
4.4.1 Symboles de Christoffel ………………………………………...76
4.4.2 Le tenseur de torsion…………………………………………….77
4.4.3 Le tenseur de Riemann………………………………………….78
4.4.4 Le tenseur de Ricci ………………………………………………81
4.4.5 Le tenseur de d’Einstein………………………………………..81
4.5 Géodésiques…………………………………………………………81
4.5.1 Transport parallèle………………………………………………81
4.5.2 Définition………………………………………………………….81
4.5.3 Proposition………………………………………………………..82
4.5.4 Courbe paramétré sur une variété (𝑀, 𝑔)……………………82
4.5.5 Equation géodésique…………………………………………….82
4.6 Dérivation covariante d’un champ de vecteurs………………..83
Exercices corrigés………………………………………………………84
Bibliographie.

8
Chapitre 1
Notions fondamentales
1.1- Ensembles
Ensemble est une collection d’éléments, noté par {, } ou E par exemple
{… ,−2,−1,0,1,2,3, … } = ℕ.
Soit 𝐴, 𝐵 et 𝐶 deux parties de E (𝐴, 𝐵, 𝐶 ⊂ 𝐸)
On a les propriétés suivantes
L’union de 𝐴 et 𝐵
𝐴 ∪ 𝐵 = {𝑥 ∈ 𝐸 𝑥 ∈ 𝐴 𝑜𝑢 𝑥 ∈ 𝐵⁄ }
L’intersection de 𝐴 et 𝐵
𝐴 ∩ 𝐵 = {𝑥 ∈ 𝐸 𝑥 ∈ 𝐴 𝑒𝑡 𝑥 ∈ 𝐵⁄ }
Autres propriétés :
𝐴 ∩ 𝐵 = 𝐵 ∩ 𝐴
𝐴 ∩ ∅ = ∅
𝐴 ∩ (𝐵 ∪ 𝐶) = (𝐴 ∩ 𝐵) ∪ (𝐴 ∩ 𝐶)
1.2- Matrices
La matrice est le passage entre deux espaces différentes, est une connexion
ente deux vecteurs reliés par une application, la forme générale d’une
matrice :
[
𝑎11 ⋯ 𝑎1𝑚⋮ ⋱ ⋮𝑎2𝑛 ⋯ 𝑎𝑛𝑚
]
Pour deux matrices A, B, les propriétés de transposé sont :
(𝐴𝑡)𝑡 = 𝐴
(𝐴𝐵)𝑡 = 𝐵𝑡𝐴𝑡
Une matrice symétrique vérifié 𝐴𝑡 = 𝐴, et pour une matrice antisymétrique
𝐴𝑡 = −𝐴
Le trace de la matrice A définit par la somme des élément diagonaux d’une
matrice A : 𝑡𝑟(𝐴) = ∑ 𝑎𝑖𝑖𝑛𝑖=1 , vérifiant les propriétés suivantes
𝑡𝑟(𝐴𝑡) = 𝑡𝑟(𝐴)
𝑡𝑟(𝐴 + 𝐵) = 𝑡𝑟(𝐴) + 𝑡𝑟(𝐵)
𝑡𝑟(𝐴𝐵) = 𝑡𝑟(𝐵𝐴)
Le déterminant d’une matrice définit par det A
det 𝐴𝑡 = det𝐴
A est inversible si et seulement si 𝑑𝑒𝑡𝐴 ≠ 0 ( on dit aussi dégénéré)

9
𝐴−1 =𝑐𝑜𝑚𝑡𝐴
det 𝐴
Le groupe linéaire générale des matrices carrées 𝑔 s’écrit
𝐺𝐿(𝑛, ℝ) = {𝑔 ∈ ℝ𝑛×𝑛|det 𝑔 ≠ 0}
Exemple : le groupe linéaire spécial
𝑆𝐿(𝑛,ℝ) = {𝑔 ∈ 𝐺𝐿(𝑛,ℝ)|det 𝑔 = 1}
Le groupe orthogonal des matrices carrées 𝑔 s’écrit
𝑂(𝑛,ℝ) = {𝑔 ∈ ℝ𝑛×𝑛|𝑔𝑡𝑔 ≠ 0}
1.3- Espace et le dual
On définit un espace vectoriel E : soit deux vecteurs 𝑥, 𝑦 ∈ 𝐸 et (𝑎, 𝑏) sont
des scalaires, on a
𝑥 + 𝑦 ∈ 𝐸
𝑎(𝑥 + 𝑦) = 𝑎𝑥 + 𝑎𝑦
𝑎(𝑏𝑥) = (𝑎𝑏𝑥)
𝑒𝑥 = 𝑥
On note ⟨𝑥, 𝑦⟩ le produit scalaire entre les deux vecteurs x et y.
Soit E un espace vectoriel de dimension fini n sur 𝐾, E∗ est un espace dual
s’il contient des formes 𝜔𝑥 linéaires et continus des vecteurs 𝑥 ∈ 𝐸
L’ensemble {𝑒𝑖}1≤𝑖≤𝑛 est la base de E, on note par {𝑒𝑗}1≤𝑗≤𝑛
la base de E∗, le
produit scalaire entre de éléments de cette base vérifié
⟨𝑒𝑖, 𝑒𝑗⟩ = 𝛿𝑖
𝑗
Soit 𝑥 ∈ 𝐸 et 𝜎 ∈ 𝐹 ⊂ 𝐸∗ si ⟨𝑥, 𝜎⟩ = 0
On dit alors que 𝑥 et 𝜎 sont orthogonaux.
Exercice.
Donner la définition de l'espace dual d'un espace vectoriel E de dimension fine.
Montrer qu'il est un espace vectoriel de 𝑑𝑖𝑚𝐸 = 𝑛, et que le dual du dual de E est
l'espace E.
1.4- Application Une application f de E vers F (𝑓 ∶ 𝐸 → 𝐹), c’est une transformation d’un
élément de E vers un élément de F noté 𝑓(𝑥).
Le composé de deux applications 𝑓: 𝐸 → 𝐹 et 𝑔: 𝐹 → 𝐺 noté 𝑔𝑜𝑓 définit par
𝑔𝑜𝑓: 𝑔𝑜𝑓(𝑥) = 𝑔(𝑓(𝑥))

10
L’identité 𝑖𝑑𝐸: 𝐸 → 𝐸 est une application simple ne fait aucun changement
dans E définie par 𝑥 → 𝑥 .
1.5- Produit tensoriel
Exemple des tenseurs dans un espace de dimension 𝑛
Un tenseur d’ordre 0 est un scalaire noté 𝑇(0) = 𝑇 de dimension 𝑚0 = 1
Un tenseur d’ordre 1 est un vecteur noté 𝑇(1) = 𝑇𝑖 de dimension 𝑚1 = 𝑚
Un tenseur d’ordre n est une matrice noté 𝑇(𝑛) = 𝑇𝑖1𝑖2…𝑖𝑛 de dimension 𝑚𝑛
On définit un produit tensoriel ⨂ par une opération qui nous laisse
passer de tenseurs d’ordre 𝑛 et 𝑚 vers un tenseur d’ordre 𝑛 +𝑚
⨂: (𝑢, 𝑣) → 𝑢⨂𝑣
C’est-à-dire (𝑢, 𝑣) → 𝑢⨂𝑣 ∶ 𝐸 × 𝐹 → 𝐸⨂𝐹
Soit la base canonique {𝒆𝒊⨂𝒆𝒋}, une matrice s’écrit dans cette base 𝑀 =
𝑀𝑖𝑗𝒆𝒊⨂𝒆𝒋
Exemple
Soit deux vecteur 𝑢 = (
𝑢1𝑢2𝑢3) et 𝑣 = (
𝑣1𝑣2𝑣3) d’un espace vectoriel de dimension 3,
le produit 𝑢⨂𝑣 est un résultat du produit entre colonne puis ligne :
𝑢⨂𝑣 = (
𝑢1𝑢2𝑢3)(𝑣1 𝑣2 𝑣3) = (
𝑢1𝑣1 𝑢1𝑣2 𝑢1𝑣3𝑢2𝑣1 𝑢2𝑣2 𝑢2𝑣3𝑢3𝑣1 𝑢3𝑣2 𝑢3𝑣3
)
1.6- Indice de sommation
Par définition on prend
𝑎𝑖 . 𝑏𝑖 = 𝑏𝑖. 𝑎𝑖 =∑𝑎𝑖. 𝑏𝑖
𝑛
𝑖=1
❖ Vecteur contra variante 𝑢𝑖 = (
𝑢1⋮𝑢𝑛) dans l’espace E de dimension n.
❖ Vecteur covariante 𝑣𝑗 = (𝑣1 ⋯ 𝑣𝑛) dans l’espace E de dimension n.

11
❖ Le produit scalaire s’écrit
⟨𝑢, 𝑣⟩ = 𝑢𝑖. 𝑣𝑖 = (
𝑢1⋮𝑢𝑛) . (𝑣1 ⋯ 𝑣𝑛) =∑𝑢𝑖 . 𝑣𝑖
𝑛
𝑖=1
Ainsi on peut écrire
𝑢𝑖 . 𝑣𝑖 =∑𝑢𝑖 . 𝑣𝑖𝑖
=∑𝑢𝑖. 𝑣𝑗𝛿𝑖𝑗𝑖𝑗
Ou 𝛿𝑖𝑗 = {1 𝑖 = 𝑗0 𝑖 ≠ 𝑗
C’est-à-dire
𝑢𝑖 . 𝑣𝑖 = 𝑢𝑖. 𝑣𝑗 . 𝛿𝑖
𝑗
𝛿𝑖𝑗est la métrique d’espace Euclidien.
Notation
𝜕𝑖 =𝜕
𝜕𝑥𝑖
𝑋𝑖𝜕𝑖 =∑𝑋𝑖
𝑛
𝑖=1
𝜕
𝜕𝑥𝑖= 𝑋1
𝜕
𝜕𝑥1+⋯+ 𝑋𝑛
𝜕
𝜕𝑥𝑛
1.7- Généralité
Un nombre complexe est définit par 𝑧 = 𝑥 + 𝑖𝑦 tel que 𝑖2 = −1 et (𝑥, 𝑦) ∈
ℝ2, et l’ensemble des nombre complexe notée ℂ.
On définit le conjugué de 𝑧 par le nombre complexe 𝑧̅ = 𝑥 − 𝑖𝑦, et la norme
de ce nombre complexe noté |𝑧| . on a les propriétés suivantes (𝑧, 𝑧’) ∈ ℂ2 𝑧̿ = 𝑧
𝑧 + 𝑧′̅̅ ̅̅ ̅̅ ̅̅ = 𝑧̅ + 𝑧′̅
𝑧. 𝑧′̅̅ ̅̅ ̅ = 𝑧̅. 𝑧′̅
|𝑧| ≔ √𝑧. 𝑧̅ = √𝑥2 + 𝑦2
|𝑧. 𝑧′| = |𝑧||𝑧′|
|𝑧| = |𝑧̅|
||𝑧| − |𝑧′|| ≤ |𝑧 + 𝑧′| ≤ |𝑧| + |𝑧′|

12
Proposition
𝑒𝑖𝜃 = cos 𝜃 + 𝑖 sin 𝜃
Preuve.
Développement limité au voisinage de 0
𝑒𝑖𝜃 = ∑(𝑖𝜃)𝑛
𝑛!
∞
𝑛=0
=∑(𝑖𝜃)2𝑘
2𝑘!
∞
𝑘=0
+∑(𝑖𝜃)2𝑘+1
(2𝑘 + 1)!
∞
𝑘=0
=∑(−1)𝑘𝜃2𝑘
2𝑘!
∞
𝑘=0
+ 𝑖∑(−1)𝑘𝜃2𝑘+1
(2𝑘 + 1)!
∞
𝑘=0
= cos 𝜃 + 𝑖 sin 𝜃
Avec
cos 𝜃 =∑(−1)𝑘𝜃2𝑘
2𝑘!
∞
𝑘=0
, sin 𝜃 = ∑(−1)𝑘𝜃2𝑘+1
(2𝑘 + 1)!
∞
𝑘=0
Corollaire
cos 𝜃 =𝑒𝑖𝜑 + 𝑒−𝑖𝜑
2 , sin 𝜃 =
𝑒𝑖𝜑 − 𝑒−𝑖𝜑
2𝑖
Voici quelques propriétés trigonométriques
cos 𝑝 + cos 𝑞 = 2 cos𝑝 + 𝑞
2cos
𝑝 − 𝑞
2
cos 𝑝 − cos 𝑞 = −2 sin𝑝 + 𝑞
2sin𝑝 − 𝑞
2
sin 𝑝 + sin 𝑞 = 2 sin𝑝 + 𝑞
2cos
𝑝 − 𝑞
2
sin 𝑝 − sin 𝑞 = 2 cos𝑝 + 𝑞
2sin𝑝 − 𝑞
2
cos(𝑝 + 𝑞) = cos 𝑝 cos 𝑞 − sin 𝑝 sin 𝑞
sin(𝑝 + 𝑞) = sin 𝑝 cos 𝑞 + cos 𝑝 sin 𝑞

13
Schéma générale de travaille
Variété M :
L’être mathématique
de l’étude
La géométrie
Riemannien :
Etude de courbure de M
par la métrique g et les
tenseurs de courbure en
espace tangent
Les formes
différentielles :
Etude de structure M par
des formes tensoriels en
espace cotangent
La géométrie
algébrique :
Etude des formes
géométriques par des
méthodes algébriques
Topologie :
Etude des différentes
structures de M

14
Chapitre 2
Variétés différentiables
2.1. Introduction
Suite aux travaux novateurs de Gauss dans l'étude des
surfaces, Riemann développa ce qui devint une branche maîtresse des
mathématiques : la géométrie différentielle. L'objectif fut de généraliser les
propriétés métriques et différentielles des surfaces "usuelles" de l'espace
euclidien à des espaces "courbés" considérés comme espaces de référence et non
plus comme plongés dans un espace plus vaste de dimension supérieure : on parle
de variétés :
Variété est une généralisation des courbes et des Surfaces en dimensions
supérieures tel les plans cercles…
On va voire plus tard plusieurs types de variétés : réels, complexes,
différentiables, connexe, orientable, …
Les calculs sont en rapport avec l'analyse à plusieurs variables c’est pour faire
des paramétrisation, mais cette fois c’est on va paramétriser les applications
géométriques.
On peut associer à chaque point de la variété un espace tangent constitué de
toutes les vitesses (direction et intensité) avec lesquelles il est possible de
s'écarter de ce point, l'espace tangent en tout point est un espace vectoriel, a la
même dimension que la variété, en d’autres termes, l’espace tangent est une
copie de ℝ𝑛. L'espace tangent a plusieurs définitions. Une définition possible est
l'espace vectoriel des chemins qui passent en ce point, quotient par la relation
d'équivalence qui identifie deux chemins ayant le même « vecteur vitesse » en ce
point c'est-à-dire la même dérivée si on les compose avec une carte quelconque.
Un champ de vecteurs est une application prend sa place de la variété vers
l'union disjointe de ses espaces tangents (l'union en elle-même est une variété
connue comme le fibré tangent). Une fonction différentiable des réels vers la
variété est une courbe sur la variété. Cela définit une fonction des réels vers les
espaces tangents cela traduit la vitesse de la courbe sur l’espace tangent de
chaque point de la variété.
Une variété M est dite connexe, si deux points quelconques de cette variété
peuvent être joint par une courbe contenue sur M, tel le tore.
15
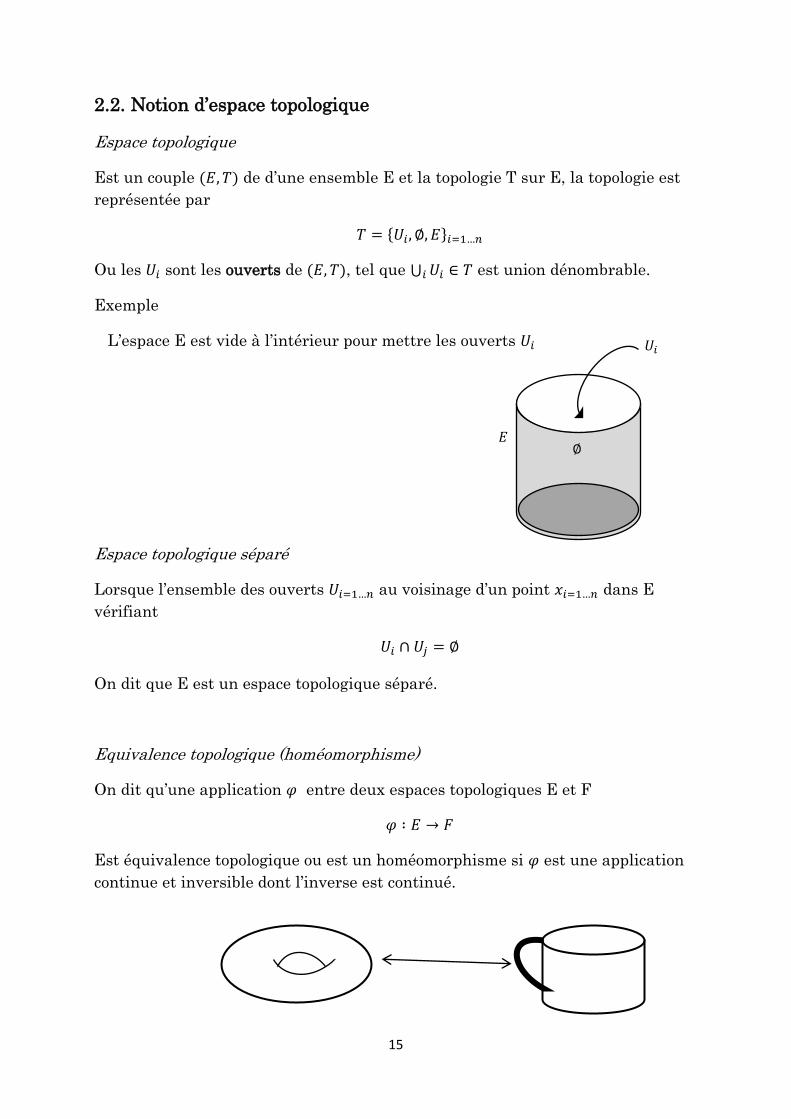
2.2. Notion d’espace topologique
Espace topologique
Est un couple (𝐸, 𝑇) de d’une ensemble E et la topologie T sur E, la topologie est
représentée par
𝑇 = {𝑈𝑖, ∅, 𝐸}𝑖=1…𝑛
Ou les 𝑈𝑖 sont les ouverts de (𝐸, 𝑇), tel que ⋃ 𝑈𝑖𝑖 ∈ 𝑇 est union dénombrable.
Exemple
L’espace E est vide à l’intérieur pour mettre les ouverts 𝑈𝑖
Espace topologique séparé
Lorsque l’ensemble des ouverts 𝑈𝑖=1…𝑛 au voisinage d’un point 𝑥𝑖=1…𝑛 dans E
vérifiant
𝑈𝑖 ∩ 𝑈𝑗 = ∅
On dit que E est un espace topologique séparé.
Equivalence topologique (homéomorphisme)
On dit qu’une application 𝜑 entre deux espaces topologiques E et F
𝜑 ∶ 𝐸 → 𝐹
Est équivalence topologique ou est un homéomorphisme si 𝜑 est une application
continue et inversible dont l’inverse est continué.
𝑈𝑖
∅ 𝐸

16
Sont topologiquement équivalentes
Ne sont pas topologiquement équivalentes
2.3. Notion de la carte
Est un couple (𝑈, 𝜑) tel que 𝜑:𝑈 → ℝ𝑛 est un homéomorphisme.
2.4. Notion d’Atlas 𝑨
A est un atlas de dimension n de la variété est l’ensemble des cartes (𝑈𝑖, 𝜑𝑖) qui
recouvrent la variété séparée :
A = (𝑈𝑖, 𝜑𝑖)
2.5. Application difféomorphisme
On dit qu’une application 𝜑 est difféomorphismes, si cette application réelles,
inversible et différentiable avec réciproque soit aussi différentiable
Pour monter qui application 𝜑 est difféomorphisme on utilise par exemple la
matrice Jacobienne 𝑑𝜑𝑝𝑙
Exemple : soit une application 𝑓(𝑥, 𝑦) = (𝑔(𝑥, 𝑦), ℎ(𝑥, 𝑦)) de classe ∁∞= ∁0, ∁𝑘=1…∞
(continué et différentiable k fois), La matrice jacobienne de 𝑓 s’écrit
𝐽 =
[ 𝜕𝑔
𝜕𝑥
𝜕𝑔
𝜕𝑦𝜕ℎ
𝜕𝑥
𝜕ℎ
𝜕𝑦]
On calcule déterminant de cette matrice s’appelle le jacobienne, puis on cherche
les domaines pour lesquelles le jacobienne ne s’annule pas, ce sont les domaines
ou l’application 𝑓 est un difféomorphisme.
Soit le paire (𝑥0, 𝑦0) pour lesquelles 𝑑𝑒𝑡 𝐽 s’annule, alors 𝑓 est un difféomorphisme
sur ℝ2 − {𝑥0, 𝑦0}.

17
2.6. Variété différentiable
2.6.1 Notion de la variété différentiable
Une variété est un espace topologique M de dimension n formé par ensemble des
points, qui représente une extension locale (déformation, courbure,) de ℝ𝑛. En chacun point de la variété, on peut définir un voisinage homéomorphe à un
ouvert de ℝ𝑛, cela veut dire que sur toute partie pas trop grosse de la variété, on
peut paramétriser un seul point par n paramètre.
Soit deux cartes (𝑈𝑖, 𝜑𝑖) et (𝑈𝑗, 𝜑𝑗) la variété M de d tel que
𝑈𝑖 ∩ 𝑈𝑗 ≠ ∅
On définit le changement de carte, l’homéomorphisme 𝜑𝑖𝑗 tel que
𝜑𝑖𝑗 = 𝜑𝑗𝜊𝜑𝑖−1
On travaille avec les changements de cartes d’une manière, tout simplement de
fait que l’étude des variétés par ses applications est incompréhensible, on ne peut
pas décrire une variété facilement, c’est quelque chose abstrait on peut pas
mesurer des choses abstraits, alors il faut projeter les notions de variété sur le
plan qui nous entoure, ce pan réel ou complexe, mais on sait travailler avec ce
plan s’appelle l’espace tangent ou l’espace analytique (réel ou complexe) ou
parfois l’espace des formes. Alors les changements de carte 𝜑𝑖𝑗 sont analytiques
on peut les mesurer facilement, et aussi ils nous informent sur la nature des
variétés de l’étude.
𝑼𝒋
𝑼𝒊
ℝ𝒏 𝑴
𝝋𝒋(𝑼𝒋)
𝝋𝒊(𝑼𝒊)
𝝋𝒋
𝝋𝒊
𝝋𝒊𝒋

18
On dit que la variété M est une variété différentiable, si l’atlas des cartes de M
contient des changements de carte 𝜑𝑖𝑗 difféomorphismes.
Une variété différentielle dans un espace topologique est une collection
d'homéomorphismes d'ensembles ouverts vers une partie unitaire de ℝ𝑛 tels que
les ensembles ouverts couvrent l'espace et que si 𝑓, 𝑔 sont des homéomorphismes
alors la fonction 𝑓𝑜𝑔−1 d'un sous-ensemble ouvert de la partie unitaire vers la
partie ouverte unitaire est infiniment différentiable. On dit que la fonction d'une
variété vers ℝ est infiniment différentiable si la composition de chaque
homéomorphisme résulte en une fonction infiniment différentiable de la partie
unitaire ouverte unitaire dans ℝ.
2.6.2 Formes composées de des application
Soit
Pour passer de point A vers B il y a deux possibilités : soit par 𝑔−1 puis 𝑓 ce
chemin passe alors par le composé de 𝑓 et 𝑔−1: 𝑓𝜊𝑔−1 , ou soit par ℎ c’est-à-dire
ℎ(𝑥) = 𝑓𝜊𝑔−1(𝑥)
Pour passer de point A vers B il y a deux possibilités : soit par 𝑔−1 puis 𝑡
finalement par 𝑓 ,ce chemin passe alors par le composé de 𝑓 , 𝑡 et 𝑔−1: 𝑓𝜊𝑡𝜊𝑔−1, ou
soit par ℎ c’est
ℎ(𝑥) = 𝑓𝜊𝑡𝜊𝑔−1(𝑥)
𝑩
𝒇
𝒉
𝒈 𝑨
+
𝒉
𝑨
𝑩
𝒕
𝒇
𝒈
+

19
Pour cette forme
On a
ℎ(𝑥) = 𝑓𝑛𝜊…𝑓2𝜊𝑓1(𝑥)
Pour la forme suivante
ℎ(𝑥) = 𝑓𝑛−1𝜊…𝜊𝑓2
−1𝜊𝑓1−1(𝑥)
Généralement
ℎ(𝑥) = 𝑓𝑛𝜔𝑛𝜊…𝜊𝑓2
𝜔2𝜊𝑓1𝜔1(𝑥)
Avec 𝜔𝑖 = ±1
Pour le sens positif d’application 𝑓𝑖 on aura 𝜔𝑖 = +1 , et pour le sens négatif
d’application 𝑓𝑖 on aura 𝜔𝑖 = −1.
Soit 𝑛 = 2𝑘 paire le nombre des applications 𝑓𝑖 qui forment
Pour 𝜔𝑖 = 𝜔𝑖+1 = 𝜔 , ∀𝑖 ∈ 1,… ,𝑛
2 et 𝜔𝑗 = 𝜔𝑗+1 = −𝜔 ∀𝑗 ∈
𝑛
2+ 1,… , 𝑛
On aura dans ce cas
ℎ(𝑥) = 𝑓𝑛−ω𝜊…𝑜𝑓𝑛
2+1
−𝜔𝑜𝑓𝑛2
𝜔𝑜…𝜊𝑓2ω𝜊𝑓1
ω(𝑥) = 𝐼𝑑(𝑥)
𝒇𝒏−1 𝒇𝒏
⋰
𝒉
𝒇1 𝒇2
𝒇3
𝒇4 +
⋱
𝒇𝒏
𝒇1 𝒇2
𝒇3
𝒇4
𝒇𝒏−1
+

20
2.6.3 Produit de deux variétés différentiables
Soit deux variétés (𝑀1, 𝐴1) et (𝑀2, 𝐴2) différentiables de dimension 𝑛 et 𝑚 classe
𝐶𝑘. Les deux atlas sont définis comme suite
𝐴1: {𝜑1: 𝑈1 → 𝑉1}
𝐴2: {𝜑2: 𝑈2 → 𝑉2}
Tel que
𝑈𝑖=1,2 est un ouvert dans la variété 𝑀𝑖=1,2.
𝑉𝑖=1,2 est un ouvert dans la variété ℝ𝑛, ℝ𝑚(𝑟𝑒𝑠𝑝. ).
On veut former le produit de deux applications 𝜑1 × 𝜑2: 𝑈1 × 𝑈2 → 𝑉1 × 𝑉2 qui
définit par 𝜑1 × 𝜑2(𝑥1, 𝑥2) = (𝜑1(𝑦1), 𝜑2(𝑦2)) tel que (𝑦1, 𝑦2) ∈ 𝑈1 × 𝑈2, ce qui nous
permet de faire le produit entre deux atlas
𝐴1 × 𝐴2: {𝜑1 × 𝜑2: 𝑈1 × 𝑈2 → 𝑉1 × 𝑉2}
Et puisque nous avons choisir ces deux atlas dans les deux variétés
différentiables 𝑀 et 𝑁 alors ce qui va nous donne le sens au produit de deux
variétés 𝑀1 ×𝑀2.
On cherche d’abord la dimension de produit de deux variétés différentiables
𝜑1 × 𝜑2: 𝑈1 × 𝑈2 → 𝑉1 × 𝑉2
𝜑1 × 𝜑2: ≡ 𝑀1 ×𝑀2 → ℝ𝑛 × ℝ𝑚
𝜑1 × 𝜑2:𝑀1 ×𝑀2 → ℝ𝑛+𝑚
Ce qui nous permet de dire que le produit 𝑀1 ×𝑀2 est de dimension 𝑛 +𝑚.
Exemple
Le cylindre est un produit entre l’espace réel et la sphère ℂ2 = ℝ × 𝕊1.
Le tore est le produit de deux sphères 𝕋2 = 𝕊1 × 𝕊1.
2.7. Paramétrisation locale
2.7.1 Définition
Une paramétrisation locale de M autour d’un point 𝑥0 est un homéomorphisme de
𝑉 ⊂ ℝ𝑛 vers 𝑈 est un voisinage de 𝑥0 qui paramétré par 𝑓
𝑈 = {𝑥 = 𝑓(𝑥1, 𝑥2, … , 𝑥𝑛) ∈ 𝑀, (𝑥1, 𝑥2, … , 𝑥𝑛) ∈ 𝑉 ⊂ ℝ𝑛}

21
2.7.2 Définition
Soit M une variété définit par un atlas (𝑈𝛼, 𝜑𝛼)
On appelle coordonnées locales, tout fonction de coordonnées définies en tout
point 𝑥 ∈ 𝑈𝛼
𝑥𝑖 = 𝜋𝑖𝑜𝜑(𝑥)
Ou 𝜋𝑖 : ℝ𝑛 → ℝ est la projection sur la i -ème composante pour 𝑖 = 1, … , 𝑛
2.8 Etude de la sphère : comme une variété différentielle
On définit une sphère par un sous espace topologique de dimension n noté 𝕊𝑛 et
définit sur ℝ𝑛+1 par 𝕊𝑛 = {(𝑥1, 𝑥2, … , 𝑥𝑛+1) ∈ ℝ𝑛+1; 𝑥1
2 + 𝑥22 +⋯+ 𝑥𝑛+1
2 = 1}.
On définit sur une sphère deux pôles : pôle nord {𝑁} de point 𝑁 = (0, . . . , 0, 1) et le
pôle sud {𝑆} de la sphère 𝕊𝑛 de point 𝑆 = (0, . . . , 0, −1). On utilise au moins deux
ouverts pour recouvrer la sphère 𝕊𝑛 :
Le premier ouvert qui recouvre la partie nord de la sphère 𝑈𝑁 = 𝕊𝑛 − {𝑁}.
Le deuxième ouvert qui recouvre la partie sud de la sphère 𝑈𝑆 = 𝕊𝑛 − {𝑆}
Puis on définit les applications suivantes :
Projection stéréographique du pôle nord 𝜑𝑁: 𝑈𝑁 = 𝕊𝑛 − {𝑁} → ℝ𝑛
Projection stéréographique du pôle sud 𝜑𝑆: 𝑈𝑆 = 𝕊𝑛 − {𝑆} → ℝ𝑛
Soit (𝑥1, 𝑥2, … , 𝑥𝑛+1) ∈ 𝑈𝑁, 𝜑𝑁(𝑥1, … , 𝑥𝑛+1) = (𝑥1
1−𝑥𝑛+1, … ,
𝑥𝑛
1−𝑥𝑛+1)
Et 𝜑𝑆(𝑥1, … , 𝑥𝑛+1) = (𝑥1
1+𝑥𝑛+1, … ,
𝑥𝑛
1+𝑥𝑛+1)
N (0, …,0, z=1)
S (0, …,0, z=-1)

22
On calcule le changement de carte de la sphère à partir de cette relation
𝜑𝑁𝑜𝜑𝑁−1: ℝ𝑛 − {0} → ℝ𝑛 − {0}
(𝑥1, 𝑥2, … , 𝑥𝑛+1) → 𝜑𝑆 (𝑥1
1 − 𝑥𝑛+1, … ,
𝑥𝑛1 − 𝑥𝑛+1
)
𝜑𝑁 et 𝜑𝑆 sont des applications difféomorphismes.
L’ensemble {(𝑈𝑁 , 𝜑𝑁); (𝑈𝑆, 𝜑𝑆)} définit un atlas de classe 𝐶∞ sur la sphère 𝕊𝑛, ce
qui confère à la sphère 𝕊𝑛 une structure de variété différentiable de dimension 𝑛
et de classe 𝐶∞.
Exercice :
1-Montrer que 𝜑𝑆𝑜𝜑𝑁−1 est un difféomorphisme.
2-Montrer que {U𝛼 = 𝕊𝑛 − {𝛼}, 𝜑𝛼} avec 𝛼 ∈ {𝑆, 𝑁} est un atlas.
Réponse :
L’application 𝜑𝑆𝑜𝜑𝑁−1 est analytique réel (d’après le théorème) puisqu’elle dans
ℝ𝑛 − {0} , alors cette application est un difféomorphisme
Les ouverts 𝑈𝑁 , 𝑈𝑆 recouvrent 𝕊𝑛 implique que {U𝛼 = 𝕊𝑛 − {𝛼}, 𝜑𝛼} est un atlas
2.9 Etude de plan projectif
Soit 𝑥 = (𝑥1, … , 𝑥𝑛+1) une paramétrisation dans ℝ𝑛+1 − {0} ou ℂ𝑛+1 − {0}, on
définit un espace projectif réel ℘𝑛(ℝ) (resp. Complexe ℘𝑛(ℂ) ) par l’ensemble des
droites de ℝ𝑛+1 qui passent par l’origine, définissent par
[𝒙1, … , 𝒙𝒏+1] = {𝜶𝒙1, … , 𝜶𝒙𝒏+1}
On s’intéresse par la suite d’étudier l’espace projectif réel.
Pour recouvrer l’espace ℘𝑛(ℝ) il nous faut 𝑛 + 1 ouverts 𝑈𝑖 c’est-à-dire
𝒄𝒂𝒓𝒅𝑼𝒊 = 𝒅𝒊𝒎ℝ𝒏+1 = 𝒏 + 1
Pour relier ces ouverts avec une application homéomorphisme 𝜑𝑖 = 𝑈𝑖 ℝ𝑛 𝑖 =
1, … , 𝑛 + 1
𝜑𝑁
𝜑𝑆
ℝ𝑛

23
𝜑𝑖[𝑥1, … , 𝑥𝑛+1] = (𝑥1𝑥𝑖, … ,
𝑥𝑖−1𝑥𝑖
,𝑥𝑖+1𝑥𝑖
, … ,𝑥𝑛+1𝑥𝑖)
Avec 𝑈𝑖 = {(𝒙1, … , 𝒙𝒏+1) ∈ ℘(ℝ), 𝑥𝑖 ≠ 0}
soit 𝑡𝛼 =𝑥𝛼
𝑥𝑖 1 ≤ 𝛼 ≤ 𝑛 + 1 ⇒ 𝑥𝛼 = 𝑥𝑖𝑡𝛼 on définit les 𝑡𝛼 dans ℝ𝑛+1
𝜑𝑖−1(𝑡1, … , 𝑡𝑖−1, 𝑡𝑖+1, … , 𝑡𝑛+1) = [𝑡1, … , 𝑡𝑖−1, 1, 𝑡𝑖+1, … , 𝑡𝑛+1]
On calcule le changement de carte plan projectif 𝜑𝑗𝑜𝜑𝑖−1
𝜑𝑗𝑜𝜑𝑖−1(𝑡1, … , 𝑡𝑛+1) = (
𝑡1𝑡𝑖, … ,
𝑡𝑖−1𝑡𝑖,1
𝑡𝑖, … ,
𝑡⏞
𝑡𝑖, …𝑡𝑛+1𝑡𝑖)
Le changement de carte est une application analytique (à un expression sur ℝ).
Par conséquent, (𝑈𝑖, 𝜑𝑖) est un atlas sur ℘𝑛(ℝ).
On s’intéresse par la suite d’étudier l’espace projectif complexe.
L’espace projectif complexe ℘𝑛(ℂ),( est une variété complexe compacte de
Dimension complexe 𝑛) est l’ensemble des droites
Complexes de ℂ𝒏+1 passant par l’origine.
Pour recouvrer l’espace ℘𝑛(ℂ) il nous faut 𝑛 + 1 ouverts 𝑈𝑖 c’est-à-dire
𝒄𝒂𝒓𝒅𝑼𝒊 = 𝒅𝒊𝒎ℂ𝒏+1 = 𝒏 + 1
Pour relier ces ouverts avec une application homéomorphisme 𝜑𝑖 = 𝑈𝑖 → ℂ𝑛 𝑖 =
1, … , 𝑛 + 1
𝜑[𝑧1̅, … , 𝑧�̅�+1] = (𝑧1𝑧𝑖, … ,
𝑧𝑖−1𝑧𝑖,𝑧𝑖+1𝑧𝑖, … ,
𝑧𝑛+1𝑧𝑖)
On calcule l’inverse de 𝜑 :
soit 𝑡𝑗 =𝑧𝑗
𝑧𝑖 1 ≤ 𝑗 ≤ 𝑛 + 1 ⇒ 𝑧𝑗 = 𝑧𝑖𝑡𝑗
𝜑−1[𝑡1, … , 𝑡𝑖−1, 𝑡𝑖+1, … , 𝑡𝑛+1] = (𝑡1̅, … , 𝑡�̅�+1)
On calcule le changement de carte plan projectif 𝜑𝑗𝑜𝜑𝑖−1
𝝋𝒋𝒐𝝋𝒊−1(𝒕1, … , 𝒕𝒏+1) = (
𝒕1𝒕𝒊, … ,
𝒕𝒊−1𝒕𝒊,1
𝒕𝒊, … ,
𝒕⏞
𝒕𝒊, …𝒕𝒏+1𝒕𝒊)

24
2.10 Variété complexe
2.10.1 Introduction sur Variété complexe
Lemme1. Toute variété complexe de dimension complexe 𝑛 est une variété différentielle
réelle de dimension réelle 2𝑛 qui est orientable.
Démonstration. La preuve se résume à observer que les jacobiens réels des changements de carte sont
tous positifs : ce sont les modules au carré des jacobiens complexes.
Réciproquement, toute surface différentiable réelle orientable admet une structure
complexe (un atlas holomorphe maximal).
Lemme2. 𝕊2 ≅ ℂ1 ∪ {∞} ≅ ℘1(ℂ)
Preuve. (Exercice)
2.10.2 Fibration de Hopf
On définit En coordonnées cartésiennes, la sphère 𝕊3 de l'espace à 4 dimensions
de centre (𝜔1, 𝜔2, 𝜔3, 𝜔4) et de rayon 𝑅 est l'ensemble de tous les points
(𝑥1, 𝑥2, 𝑥3, 𝑥4) par l’équation :
(𝑥4 − 𝜔4)2 + (𝑥3 − 𝜔3)
2 + (𝑥2 − 𝜔2)2 + (𝑥1 − 𝜔1)
2 = 𝑅2
On choisit 𝑅 = 1 (𝜔1, 𝜔2, 𝜔3, 𝜔4) = (0,0,0,0) et on obtient la sphère unitaire qui
définit par l’ensemble
𝕊3 = {(𝑥1, 𝑥2, 𝑥3, 𝑥4) ∈ ℝ4: 𝑥4
2 + 𝑥32 + 𝑥2
2 + 𝑥12 = 1}
En coordonnées sphériques on peut paramétrisé la sphère 𝕊3 en utilisant les
angles (𝜓, 𝜃, 𝜑)
𝑥1 = 𝑅 cos𝜓 𝑥2 = 𝑅 sin𝜓 cos 𝜃 𝑥3 = 𝑅 sin𝜓 sin 𝜃 cos𝜑𝑥4 = 𝑅 sin𝜓 sin 𝜃 sin 𝜑
On peut monter que 𝕊3 est un sous espace complexe :
Soit deux éléments complexes (𝑧1, 𝑧2) ∈ ℂ2 tel que 𝑧1 = 𝑥1 + 𝑖𝑥2 et 𝑧2 = 𝑥3 + 𝑖𝑥4
On a |𝑧2|2 + |𝑧1|
2 = 𝑥42 + 𝑥3
2 + 𝑥22 + 𝑥1
2 cela nous permet d’écrire
𝕊3 = {(𝑧1, 𝑧2) ∈ ℂ2: |𝑧2|
2 + |𝑧1|2 = 1}
Alors 𝕊3 ⊂ ℂ2 .

25
Pour un cercle unité 𝒞 = {(𝑥, 𝑦) ∈ ℝ2||𝑥2 + 𝑦2 = 1} on définit une paramétrisation
D’une application 𝜑(𝜃 ∈ ℝ) = (cos 𝜃 , sin 𝜃) ∈ ℝ2 parcouru dans le sens
trigonométrique. L’application 𝛾: 𝑡 ∈ ℝ → −𝑡 ∈ ℝ est un changement admissible de
paramétrisation qui inverse l’orientation 𝜑𝑜𝛾parcourt le cercle unité dans le sens
des aiguilles d’une montre.
On définit l’application de Hopf par une application qui transporte chaque
élément de 𝕊3 vers un élément de 𝕊2
𝜋: 𝕊3 → 𝕊2
𝜋(𝑧1, 𝑧2) = (𝑧1̅𝑧2 + 𝑧2̅𝑧1, 𝑖(𝑧1̅𝑧2 − 𝑧2̅𝑧1), |𝑧1|2 − |𝑧2|
2)
La norme de cette application est très intéressante pour trouver largeur de fibration
|𝜋(𝑧1, 𝑧2)|2 = (𝑧1̅𝑧2 + 𝑧2̅𝑧1)
2 − (𝑧1̅𝑧2 − 𝑧2̅𝑧1)2 + (|𝑧1|
2 − |𝑧2|2)2
|𝜋(𝑧1, 𝑧2)|2 = 4|𝑧1𝑧2|
2 + |𝑧1|4 − 2|𝑧1𝑧2|
2 + |𝑧2|4
|𝜋(𝑧1, 𝑧2)|2 = (|𝑧1|
2 + |𝑧2|2)2
A partir de cette application on peut paramétriser la sphère 𝕊3, c’est-à-dire
trouver 𝑧1, 𝑧2 en fonction de (𝜃, 𝜑) puisque 𝜋 chaque élément de 𝕊3 vers un
élément 𝕊2, on peut appliquer ce raisonnement sur les coordonnées sphériques de
la sphère 𝕊3 (𝜓, 𝜃, 𝜑) vers les coordonnées (𝜃, 𝜑)
Autrement dit
𝜋(𝜓, 𝜃, 𝜑) = (𝜃, 𝜑)
Et la sphère 𝕊2 est paramétrisée par deux paramètres (𝜃, 𝜑) qui définit par
l’application (cos𝜑 sin 𝜃 , sin𝜑 sin 𝜃, cos 𝜃), si on prend cette application qui
caractérise les éléments de la sphère 𝕊2
(𝜃, 𝜑) = (cos𝜑 sin 𝜃sin𝜑 sin 𝜃cos 𝜃
)
=
(
𝑒𝑖𝜑 + 𝑒−𝑖𝜑
2(cos
𝜃
2sin𝜃
2+ cos
𝜃
2sin𝜃
2)
𝑒𝑖𝜑 − 𝑒−𝑖𝜑
2𝑖(cos
𝜃
2sin𝜃
2+ cos
𝜃
2sin𝜃
2)
cos (𝜃
2+𝜃
2) )

26
=
(
cos𝜃
2sin𝜃
2𝑒−𝑖𝜑 + cos
𝜃
2sin𝜃
2𝑒𝑖𝜑
𝑖 (cos𝜃
2sin𝜃
2𝑒−𝑖𝜑 − cos
𝜃
2sin𝜃
2𝑒𝑖𝜑)
cos2𝜃
2− sin2
𝜃
2 )
Voir chapitre 1.
Comparant le dernier résultat avec l’expression de 𝜋
𝜋(𝑧1, 𝑧2) = (𝑧1̅𝑧2 + 𝑧2̅𝑧1, 𝑖(𝑧1̅𝑧2 − 𝑧2̅𝑧1), |𝑧1|2 − |𝑧2|
2)
Et vous allez trouver que
𝑧1(𝜃, 𝜑) = cos𝜃
2𝑒−𝑖
𝜑2 ; 𝑧2(𝜃, 𝜑) = sin
𝜃
2𝑒𝑖𝜑2
Et puisque 𝑧1, 𝑧2 paramétrisés la sphère 𝕊3 des coordonnées (𝜓, 𝜃, 𝜑) alors il faut
exprimer 𝑧1, 𝑧2 en fonction de (𝜓, 𝜃, 𝜑)
𝒛𝟏(𝜽,𝝋,𝝍) = 𝐜𝐨𝐬𝜽
𝟐𝒆−
𝒊𝟐(𝝍+𝝋) ; 𝒛𝟐(𝜽,𝝋,𝝍) = 𝐬𝐢𝐧
𝜽
𝟐𝒆−
𝒊𝟐(𝝍−𝝋)
Et puisque on applique 𝜋𝑜(𝑧1, 𝑧2)𝑜(𝜓, 𝜃, 𝜑) vers (𝜃, 𝜑) c’est-à-dire de 𝕊3 vers 𝕊2,
cela nous montre que l’application de Hopf transporte chaque élément de 𝕊3 vers
un élément de 𝕊2 et on écrit
𝜋: 𝕊3 → 𝕊2
Pour un 𝛼 ∈ ℝ on peut parler de la transformation suivante
𝑧1 → 𝑧1′ = 𝑒𝑖𝛼𝑧1
𝑧2 → 𝑧2′ = 𝑒𝑖𝛼𝑧2
Cette transformation laisse 𝜋 invariant (simple à vérifier) :
𝜋(𝑧1, 𝑧2) = 𝜋(𝑧1′, 𝑧2′)
Aure exemple de fibration de Hopf
𝜋: 𝕊3 → 𝕊2
(𝑧1, 𝑧2) →𝑧1𝑧2 𝑧2 ≠ 0
La 3-sphère 𝕊3 est un fibré de cercle 𝕊1 au-dessus de la sphère 𝕊2.

27
𝕊1 → 𝕊3→⏟𝜋
𝕊2
La fibre au-dessus de chaque point 𝕊2 est un cercle sur 𝕊3. Donc la 3-sphère n’est
rien d’autre qu’une union de grands cercles paramétrés par les points de la
sphère 𝕊2.
Des exemples de fibration de Hopf
2.10.3 Tore
Le tore est le composé d’un nombre définit des sphères on écrire également
𝕋𝑛 = 𝕊1 × …× 𝕊1
On dit aussi que le tore est un sous espace topologique d’ensemble complexe ℂ𝑛
𝕋𝑛 = {(𝑧1, … , 𝑧𝑛) ∈ ℂ𝑛: |𝑧1| = ⋯ = |𝑧𝑛| = 1 }
En tout point du tore on peut lui associer une application définit par
(𝑧1, … , 𝑧𝑛) → (𝑒2𝜋𝑖𝑧1 , … , 𝑒2𝜋𝑖𝑧𝑛)
Remarque. 𝕋2 = 𝕊1 × 𝕊1 ≠ 𝕊2
Le tore en trois dimensions

28
2.11 bouteille de Klein
Selon Felix Klein pour une surface fermée, sans bord et non orientable, c'est-à-
dire une surface pour laquelle il est impossible de définir un intérieur et un
extérieur, autrement dit l’intérieur et l’extérieur sont les même chose.
On ne peut pas représenter la bouteille de Klein dans l'espace ℝ3 que si l'on
accepte qu'elle se traverse elle-même ; aussi, aucune réalisation que l'on peut voir
de la bouteille de Klein n'est exacte. Dans ℝ4, il est par contre possible de la
réaliser sans auto-intersection (mathématiquement, on dit qu'elle possède
un plongement (immersion injective) de classe 𝐶∞ dans ℝ4).
Bouteille de Klein en 3 dimension
2.12 Théorèmes (à monter)
Théorème 1
Tout surface topologique compacte connexe est homéomorphe : à la somme de
Genius 𝑔 ≥ 0 copies du tore 𝑇2.Ou à la somme connexe de 𝑔 ≥ 1 copies du plan
projectif réel 𝑃2(𝑅).Alors ne sont pas homéomorphes.
Théorème 2
Tout espace topologique quotient 𝐺\𝐻 admet une unique structure d’une variété
différentiable de classe 𝐶𝑘, pour la projection canonique 𝜋:𝐻 → 𝐺\𝐻 soit 𝐶𝑘-
difféomorphisme local
Théorème 3
Soit M une variété.
Si (𝑈𝛼; 𝜑𝛼) est une famille de cartes 𝐶 𝑘≥1 et (𝑉𝛽; 𝜓𝛽) est la famille de cartes 𝐶 ∞,
alors (𝜓𝛽𝑜𝜑𝛼)−1 sont de classe 𝐶 𝑘≥1, c’est-à-dire telle que toutes les cartes de la
structure 𝐶 ∞ sont aussi de classe 𝐶 𝑘≥1.

29
Théorème 4 (d’inversion locale)
Le théorème d'inversion locale précise les conditions d'existence locale d'une
application réciproque pour une fonction ƒ. C'est une généralisation d'un
théorème simple sur les fonctions de la variable réelle.
Si ƒ est définie sur un intervalle 𝐼 et si a est un élément de 𝐼, si ƒ possède
en a une dérivée continue non nulle alors il existe un intervalle 𝐼𝑎 autour de 𝑎, un
intervalle 𝐽(𝑓(𝑎)) autour de ƒ(a) et une fonction ƒ−1 définie sur 𝐽(𝑓(𝑎))qui soit
l'application réciproque de la restriction de ƒ à 𝐼𝑎.
Cette application réciproque est aussi dérivable en ƒ(a).
Le théorème d'inversion locale généralise cette propriété à des fonctions définies
sur des espaces vectoriels réels de dimension finie. La condition « 𝑓′(𝑎) non
nulle » est alors remplacée par « le jacobien de ƒ en a est non nul ». De plus, si ƒ
est de classe 𝐶𝑘, l'application réciproque l'est aussi.

30
Exercices corrigés
Exercice 1.
Montrer que ℝ𝑛 est une variété différentiable.
Réponse.
On suppose que ℝn recouvre ℝn (choix d’une seule carte), et soit l’application
d’identité définit par
𝑰𝒅(ℝ𝒏): 𝒙 → 𝒙
Ces deux choix nous montrent que ℝn est une variété différentiable de dimension
n et de classe infini
Exercice 2.
Soit la fonction 𝑓(𝑥, 𝑦) = (𝑥2 − 𝑦2, 2𝑥𝑦):ℝ2 → ℝ2
Montrer que c’est un difféomorphisme local sur le plan privé de l’origine.
Déterminer un ouvert maximal 𝑈 tel que la restriction de 𝑓 à 𝑈 soit un
difféomorphisme global sur son image. Même question avec la fonction
𝒈(𝒙, 𝒚) = (𝒆𝒙𝒄𝒐𝒔 𝒚, 𝒆𝒙𝒔𝒊𝒏 𝒚).
Réponse.
On calcule la matrice jacobienne de 𝑓 en (𝑥, 𝑦)
𝐽(𝜑) =
(
𝜕𝑥2 − 𝑦2
𝜕𝑥
𝜕𝑥2 − 𝑦2
𝜕𝑦𝜕2𝑥𝑦
𝜕𝑥
𝜕2𝑥𝑦
𝜕𝑦 )
= (
2𝑥 −2𝑦2𝑦 2𝑥
)
Son déterminant est
det 𝐽 = det (2𝑥 −2𝑦2𝑦 2𝑥
) =4(𝑥2 + 𝑦2)
Donc pour tout (𝑥, 𝑦) ≠ (0, 0), la différentielle de 𝑓 en (𝑥, 𝑦) est inversible.
D’après le théorème d’inversion locale, la restriction de 𝑓 à un voisinage ouvert de
(𝑥, 𝑦) est un difféomorphisme sur son image. La restriction de 𝑓 à ℝ2 privé de

31
l’origine n’est pas un difféomorphisme sur son image, car 𝑓(−𝑥,−𝑦) = 𝑓(𝑥, 𝑦).
Par contre la restriction de f au demi plan supérieur est un difféomorphisme sur
son image. Cela découle du théorème d’inversion locale et du fait que la
restriction de 𝑓 à 𝑈 soit injective. De plus U est un ouvert maximal ayant cette
propriété. En effet si 𝑉 est un ouvert contenant strictement U, alors V contient
un point de coordonnées (𝑥, 𝑦) avec 𝑦 < 0, mais alors (−𝑥,−𝑦) ∈ 𝑈 ⊂ 𝑉, et donc
la restriction de 𝑓 à 𝑉 n’est pas injective.
Exercice 3.
Soit une application 𝜑:ℝ2 → ℝ× ]0, +∞[ définie par 𝜑(𝑥, 𝑦) = (𝑥𝑒𝑦, 𝑒𝑦), Monter
que 𝜑 est un 𝐶1 −difféomorphisme et déterminer son application réciproque 𝜑−1.
Réponse.
L’application 𝜑 définie par (𝑥, 𝑦) → (𝑥𝑒𝑦, 𝑒𝑦), pour monter qu’elle est
difféomorphisme on cherche la valeur de déterminant de son matrice jacobienne.
La matrice de Jacobi est
𝐽(𝜑) =
(
𝜕𝑥𝑒𝑦
𝜕𝑥
𝜕𝑥𝑒𝑦
𝜕𝑦𝜕𝑒𝑦
𝜕𝑥
𝜕𝑒𝑦
𝜕𝑦 )
= (
𝑒𝑦 𝑥𝑒𝑦
0 𝑒𝑦)
Le jacobienne de cette matrice
det 𝐽(𝜑) = det (𝑒𝑦 𝑥𝑒𝑦
0 𝑒𝑦)
det 𝐽(𝜑) = 𝑒2𝑦 ∀𝑥
det 𝐽(𝜑) ne s’annule pas dans ℝ2 ∀𝑥 et ∀𝑦. Alors 𝜑 est un 𝐶1 −difféomorphisme.
Soit 𝑢 = 𝑥𝑒𝑦 et 𝑣 = 𝑒𝑦 implique 𝑥 =𝑢
𝑣 et 𝑦 = ln 𝑣
𝜑(𝑥, 𝑦) = (𝑢, 𝑣)
𝜑−1(𝑢, 𝑣) = (𝑥, 𝑦)
𝜑−1(𝑢, 𝑣) = (𝑢
𝑣, ln 𝑣)
C’est l’application réciproque de 𝜑.
Exercice 4.
Monter que ℂ1 ≅ ℝ2, conclure que ℂ𝑛 ≅ ℝ𝑛+1

32
Réponse.
Soit un élément complexe 𝑧1 ∈ ℂ1 tel que 𝑧1 = 𝑥1 + 𝑖𝑥2
ℂ1 = {𝑧1 ∈ ℂ}
Egalement puisque 𝑧1 varié selon la variation de deux nombres réels 𝑧1 ∝ (𝑥1, 𝑥2)
Alors ℂ1 = {(𝑥1, 𝑥2) ∈ ℝ2} ce qui nous montre que ℂ1 est isomorphe à ℝ2 et on écrit
ℂ1 ≅ ℝ2
De même pour et par l’homogénéité des calculs on peut conclure ℂ𝑛 ≅ ℝ𝑛+1
Exercice 5.
Monter que 𝕊𝑛\{(0, … ,0,1)} ≅ ℝ𝑛 pour 𝑛 ≥ 1
Réponse.
Soit l’application du nord 𝜑𝑁: 𝑈𝑁 = 𝕊𝑛 − {𝑁} ou 𝜑𝑁: 𝕊
𝑛\{(0, … ,0,1)} → ℝ𝑛 définit
par
𝜑𝑁(𝑥1, 𝑥2, … , 𝑥𝑛+1) = (𝑥1
1 − 𝑥𝑛+1,
𝑥21 − 𝑥𝑛+1
, … ,𝑥𝑛
1 − 𝑥𝑛+1)
𝜑𝑁(𝑥1, 𝑥2, … , 𝑥𝑛+1) =1
1 − 𝑥𝑛+1(𝑥1, 𝑥2, … , 𝑥𝑛)
On cherche l’inverse de 𝜑 en posant 𝑡𝑖 =𝑥𝑖
1−𝑥𝑛+1 𝑖 = 1,… , 𝑛 + 1
𝜑𝑁−1(𝑡1, 𝑡2, … , 𝑡𝑛) =
1
1 + ‖𝑡‖2(2𝑡1, … , 2𝑡𝑛 , ‖𝑡‖
2 − 1)
L’application𝜑𝑁: 𝕊𝑛\{(0, … ,0,1)} → ℝ𝑛 est bijective, continue ainsi que sa
réciproque. Alors 𝜑𝑁 est un homéomorphisme. Donc 𝕊𝑛\{(0, … ,0,1)} ≅ ℝ𝑛
33
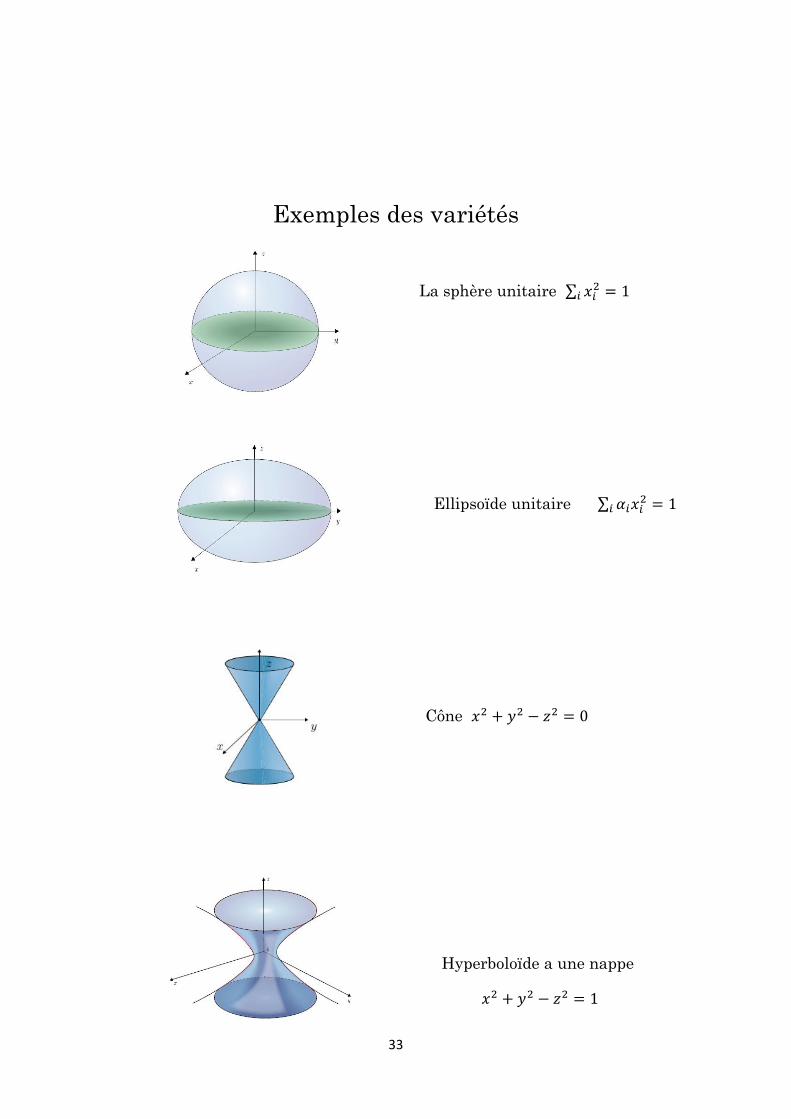
Exemples des variétés
La sphère unitaire ∑ 𝑥𝑖2
𝑖 = 1
Ellipsoïde unitaire ∑ 𝛼𝑖𝑥𝑖2
𝑖 = 1
Cône 𝑥2 + 𝑦2 − 𝑧2 = 0
Hyperboloïde a une nappe
𝑥2 + 𝑦2 − 𝑧2 = 1

34
Chapitre 3
Espaces tangents et cotangent aux
variétés
Notion : Fibré tangent, Espace dual, base locale, L’espace tangent à une sous-variété de 𝑅𝑛
3.1 Fibré tangent et Fibré cotangent
3.1.1 Définition
On appelle fibré tangent 𝑇𝑀 sur une variété différentiable M de dimension m
l’union disjointe des espaces tangents 𝑇𝑥𝑀 aux points x
𝑻𝑴 = ⋃𝑻𝒙𝑴
𝒙∈𝑴
On appelle fibré cotangent 𝑇∗𝑀sur une variété différentiable M de dimension m
l’union disjointe des espaces cotangents 𝑇𝑥∗𝑀
𝑻∗𝑴 =⋃𝑻𝒙∗𝑴
𝒙∈𝑴
3.1.2 Espace tangent et Espace cotangent
L’espace tangent de M au point x noté 𝑇𝑥𝑀 muni d’une base
𝒆𝜶 =𝜕
𝜕𝒙𝜶
Et tous les vecteurs dans cette espace s’écrivent toujours dans cette base
𝑽 = 𝑽𝜶𝜕
𝜕𝒙𝜶
Exemple : tous les formes de la géométrie Riemannienne s’écrivent dans cette
base.
L’espace cotangent de M au point x noté 𝑇𝑥∗𝑀 est un espace dual de 𝑇𝑥𝑀 c’est-à-
dire est l’ensemble des formes linéaires et continués sur 𝑇𝑥𝑀, l’espace cotangent
muni de la base suivante

35
𝒆𝜷 = 𝒅𝒙𝜷
Avec < 𝑒𝛽 , 𝑒𝛼 >= 𝛿𝛼𝛽 vérifiant bien la relation d’ortho-normalisation.
Et tous les vecteurs dans cette espace s’écrivent toujours dans cette base
𝑽 = 𝑽𝜷𝒅𝒙𝜷
Exemple : tous les formes des formes différentielles s’écrivent dans cette base.
3.1.3 Application tangente
3.1.3.1 Définition
Soit une variété M muni d’un espace tangent au point 𝑥0
et N une autre variété. On appelle l’application tangente de 𝑓:𝑀 → 𝑁,
l’application linéaire 𝑇𝑥0𝑓: 𝑇𝑥0𝑀 → 𝑇𝑓(𝑥0)𝑁, définie par 𝑇𝑓(𝑣) = 𝑇𝑥0𝑓(𝑣) pour tout
𝑣 ∈ 𝑇𝑥0𝑀, c’est-à-dire l’application 𝑇𝑓 nous permet de construire à partir d’un
espace tangent à variété M en 𝑥0 un autre espace tangent dans autre variété N
au point 𝑓(𝑥0).
3.1.3.1 Propriétés
Soit M, N et L trois variétés de classe-1, et les applications définissent par
(𝑓: 𝐿 → 𝑀 , 𝑔:𝑀 → 𝑁) ∈ 𝐶1
On a
𝑇𝑥0(𝑔𝑜𝑓) = (𝑇𝑓(𝑥0)𝑔)𝑜𝑇𝑥0(𝑓)
𝑇𝑥0(𝛼𝑓 + 𝑔) = 𝛼𝑇𝑥0𝑓 + 𝑇𝑥0𝑔 𝛼 ∈ ℝ
𝑇𝑥0(𝑓𝑔) = 𝑔(𝑥0)𝑇𝑥0𝑓 + 𝑓(𝑥0)𝑇𝑥0𝑔
3.2 Champs de vecteurs
3.2.1 Définition
Un champ de vecteur sur un ouvert U de M est une vecteur 𝑋:𝑀 → 𝑇𝑀 du fibré
tangent sur la variété M. on note 𝔛(𝑀) l’ensemble des champs de vecteurs sur M,
𝔛(𝑀) est un espace vectoriel sur ℝ .

36
Tout champ de vecteur 𝑋 sur une base locale 𝑥𝑖 →𝜕
𝜕𝑥𝑖, 𝑖 = 1…𝑚 dans un ouvert U
sur la variété M de classe ∁∞s’exprime alors
𝑋 =∑𝑋𝑖𝑚
𝑖=1
𝜕
𝜕𝑥𝑖= 𝑋𝑖
𝜕
𝜕𝑥𝑖= 𝑋𝑖𝜕𝑖
Autour d’un point 𝑥 on peut former un espace tangent des champs de vecteurs 𝑋.
Un champ de vecteur X tangent à la variété M au point 𝑥0 est une forme linéaire.
Soit U un ouvert autour de 𝑥0 et les deux applications 𝑓: 𝑈𝑓 → ℝ et 𝑔:𝑈𝑔 → ℝ
Pour tout 𝑋, 𝑌 ∈ 𝔛(𝑀) on a les propriétés suivantes
(𝑋 + 𝑌)𝑓 = 𝑋(𝑓) + 𝑌(𝑓)
(𝛼𝑋)𝑓 = 𝛼𝑋(𝑓)
𝑋(𝑓𝑔) = 𝑓(𝑥0)𝑋(𝑔) + 𝑋(𝑓)𝑔(𝑥0)
𝑋(𝛼𝑓 + 𝑔) = 𝛼𝑋(𝑓) + 𝑋(𝑔)
Pour 𝛼 ∈ ℝ.
L’ensemble des champs de vecteurs tangents à variété M vérifié par ces
propriétés est un ℝ-espace vectoriel noté 𝑇𝑥0𝑀 est un espace tangent à la variété
M en point 𝑥0.
L’espace tangent 𝑇𝑥0𝑀 est muni d’une base d’un système de coordonnées sous
Forme des opérateurs de dérivée en 𝑥0 sur (𝑈, (𝑥1, … , 𝑥𝑛))
(𝜕1, … , 𝜕𝑛)
Tout champ de vecteur s’applique sur une application 𝑓 s’écrit
𝑋(𝑓) =∑𝑋(𝑥𝑖)𝜕𝑓
𝜕𝑥𝑖
𝑛
𝑖=1
(𝑥0)
𝑋(𝑓) =∑𝑋(𝑥𝑖)𝜕𝑖|𝑥0
𝑛
𝑖=1
𝑓
Alors
𝑋 =∑𝑋(𝑥𝑖)𝜕𝑖|𝑥0
𝑛
𝑖=1

37
On voit bien que {𝜕𝑖} forme un système de base de 𝑇𝑥0𝑀.
Soit (𝑈, 𝜑 = (𝑥1, … , 𝑥𝑛)) une carte en 𝑥0. On définit un 𝑛 champ de vecteurs de la
base sous forme de dérivation 𝜕𝑖=1,…,𝑛.
𝜕𝑓
𝜕𝑥𝑖(𝑥0) = 𝜕𝑖|𝑥0𝑓 = 𝑑(𝑓𝑜𝜑
−1)𝜑(𝑥0)|𝑒𝑖
Pour tout 𝑓:ℝ𝑛 → ℝ et 𝑒𝑖=1,…,𝑛 est la base canonique de ℝ𝑛
Si𝜕𝑖|𝑥0𝑓 = 0 on dit que 𝑓 est plat en 𝑥0.
Soit un système des scalaires (𝛼1, … , 𝛼𝑛) vérifiant
∑𝛼𝑖
𝑛
𝑖=1
𝜕𝑖|𝑥0 = 0
Et 𝜕𝑖|𝑥0𝑥𝑗 = 𝛿𝑖𝑗 / 𝑖, 𝑗 = 1,… , 𝑛 alors 𝛼𝑖 = 0 , 𝑖 = 1, . . , 𝑛 par conséquent le système est
libre, ce qui prouve que les dérivations 𝜕𝑖|𝑥0 forme un système de cordonnées
(𝑥1, … , 𝑥𝑛) en 𝑥0 dans l’espace tangent.
3.2.2 Lois de transformation
Soit par la suite deux systèmes de coordonnées :
Définit sur un ouvert 𝑈 en 𝑥0 sur système de coordonnées
𝜑 = (𝑥1, … , 𝑥𝑛)
Définit sur un ouvert 𝑈 en 𝑥0 sur système de coordonnées
𝛾 = (𝑦1, … , 𝑦𝑛)
On pose 𝜕
𝜕𝑥𝑖= 𝜕𝑥𝑖 et
𝜕
𝜕𝑦𝑖= 𝜕𝑦𝑖
𝑥0
𝑀
𝑇𝑥0𝑀
𝑋 𝑓

38
On a 𝜕𝑥𝑖𝑓 = 𝑑(𝑓𝑜𝜑−1)𝜑(𝑥0) = 𝑑(𝑓𝑜𝛾
−1𝑜𝛾𝑜𝜑−1)𝜑(𝑥0)|𝑒𝑖
𝜕𝑥𝑖𝑓 = 𝑑(𝑓𝑜𝛾−1)𝛾(𝑥0)𝑑(𝛾𝑜𝜑
−1)𝜑(𝑥0)|𝑒𝑖
D’autre part on a
𝑑(𝛾𝑜𝜑−1)𝜑(𝑥0)|𝑒𝑖 = 𝑑((𝑦1, … , 𝑦𝑛)𝑜𝜑−1)𝜑(𝑥0)|𝑒𝑖
= 𝑑((𝑦1, … , 𝑦𝑛)𝑜𝜑−1)𝜑(𝑥0)|𝑒𝑖
= (𝑑(𝑦1𝑜𝜑−1)𝜑(𝑥0), … , 𝑑(𝑦𝑛𝑜𝜑
−1)𝜑(𝑥0)|𝑒𝑖)
= (𝜕𝑦1𝜕𝑥𝑖
(𝑥0), … ,𝜕𝑦𝑛𝜕𝑥𝑖
(𝑥0))
= (𝜕𝑥𝑖𝑦1, … , 𝜕𝑥𝑖𝑦𝑛)
=∑𝜕𝑥𝑖𝑦𝑗
𝑛
𝑗=1
(𝑥0)|𝑒𝑗
On continue les calculs de départ
𝜕𝑥𝑖𝑓 =∑𝜕𝑥𝑖𝑦𝑗
𝑛
𝑗=1
(𝑥0)|𝑒𝑗𝑑(𝑓𝑜𝛾−1)𝛾(𝑥0)
𝜕𝑥𝑖𝑓 =∑𝜕𝑥𝑖𝑦𝑗
𝑛
𝑗=1
(𝑥0)|𝑒𝑗𝜕𝑦𝑗𝑓
Par ceci on obtient ainsi les lois de transformations du système de coordonnées
locales
𝜕
𝜕𝑥𝑖=∑
𝜕𝑦𝑗
𝜕𝑥𝑖
𝑛
𝑗=1
𝜕
𝜕𝑦𝑗
𝜕
𝜕𝑦𝑖=∑
𝜕𝑥𝑗
𝜕𝑦𝑖
𝑛
𝑗=1
𝜕
𝜕𝑥𝑗
3.2.3 Espace tangent muni d’un crochet de Lie
Les champs de vecteur 𝑋(𝑀) forment une algèbre de Lie agissant sur une
application 𝑓 ∈ ∁∞, définissent le crochet

39
[𝑋, 𝑌]𝑓 = 𝑋(𝑌𝑓) − 𝑌(𝑋𝑓)
Ce crochet est la forme d’une dérivée.
Proposition.
Soit X, Y et Z champs de vecteurs sur ℝ𝑛,on a
[𝑋, 𝑋] = 0
[𝑋, [𝑌, 𝑍]] + [𝑌, [𝑍, 𝑋]] + [𝑍, [𝑋, 𝑌]] = 0
Lemme de Schwartz
Soit 𝑓:𝑀 → ℝ une application de classe 𝐶∞
𝜕2
𝜕𝑥𝑖𝜕𝑥𝑗𝑓 =
𝜕2
𝜕𝑥𝑗𝜕𝑥𝑖𝑓
Exercices.
1- En utilisant l’expression locale des champs 𝑋 = 𝑋𝑖𝜕𝑖 et 𝑌 = 𝑌𝑖𝜕𝑖 montrer
que
[𝑋, 𝑌] = (𝑋𝑖𝜕𝑖𝑌𝑗 − 𝑌𝑖𝜕𝑖𝑋
𝑗)𝜕𝑗
Réponse.
[𝑋, 𝑌]𝑓 = 𝑋𝑖𝜕𝑖(𝑌𝑗𝜕𝑗𝑓) − 𝑌
𝑗𝜕𝑗(𝑋𝑖𝜕𝑖𝑓)
[𝑋, 𝑌]𝑓 = 𝑋𝑖𝜕𝑖(𝑌𝑗)𝜕𝑗𝑓 + 𝑋
𝑖𝑌𝑗𝜕𝑖𝜕𝑗𝑓 − 𝑌𝑗𝜕𝑗(𝑋
𝑖)𝜕𝑖𝑓 − 𝑌𝑗𝑋𝑖𝜕𝑗𝜕𝑖𝑓
En utilisant le changement d’indice on trouve
[𝑋, 𝑌]𝑓 = (𝑋𝑖𝜕𝑖𝑌𝑗 − 𝑌𝑖𝜕𝑖𝑋
𝑗)𝜕𝑗𝑓
2- Montrer que
[𝑋𝑓, 𝑌] = 𝑓[𝑋, 𝑌] − 𝑌(𝑓)𝑋
Réponse. En utilisant les expressions locales 𝑋 = 𝑋𝑖𝜕𝑖 et 𝑌 = 𝑌𝑖𝜕𝑖
On a
[𝑓𝑋, 𝑌] = (𝑓𝑋𝑖𝜕𝑖𝑌𝑗 − 𝑌𝑖𝜕𝑖𝑓𝑋
𝑗)𝜕𝑗
[𝑓𝑋, 𝑌] = (𝑓𝑋𝑖𝜕𝑖𝑌𝑗 − 𝑌𝑖𝑓𝜕𝑖𝑋
𝑗 − 𝑌𝑖(𝜕𝑖𝑓)𝑋𝑗)𝜕𝑗
[𝑓𝑋, 𝑌] = 𝑓(𝑋𝑖𝜕𝑖𝑌𝑗 − 𝑌𝑖𝜕𝑖𝑋
𝑗)𝜕𝑗 −−𝑌𝑖(𝜕𝑖𝑓)𝑋
𝑗𝜕𝑗
[𝑓𝑋, 𝑌] = 𝑓[𝑋, 𝑌] − 𝑌(𝑓)𝑋

40
3.3 Groupe
3.3.1 Groupe de Lie
Un groupe de Lie (𝐺,×) est une variété différentiable de classe 𝐶∞ et de
dimension 𝑛.muni d’une application (𝑥, 𝑦) → 𝑥. 𝑦 ∶ 𝐺 × 𝐺 → 𝐺 avec 𝑥, 𝑦 sont
inversibles. Le produit d’un groupe de Lie G de dimension 𝑛 avec un autre groupe
de Lie Q de dimension 𝑚, est un groupe de Lie G×Q de dimension 𝑛 ×𝑚.
Théorème de Chevalley Tout sous-groupe fermé 𝐻 d’un groupe de Lie 𝐺 est un sous-groupe de Lie de 𝐺.
Théorème d’Ado
Toute algèbre de Lie de dimension finie sur un corps 𝐾 de caractéristique nulle
est isomorphe à une algèbre de Lie de matrices.
Le groupe linéaire générale des matrices carrées 𝑔 s’écrit
𝐺𝐿(𝑛, ℝ) = {𝑔 ∈ ℝ𝑛×𝑛|det 𝑔 ≠ 0}
Exemple : le groupe linéaire spécial
𝑆𝐿(𝑛,ℝ) = {𝑔 ∈ 𝐺𝐿(𝑛,ℝ)|det 𝑔 = 1}
Exercice.
Soit deux groupes de lie
𝑈(𝑛) = {𝐴 ∈ 𝐺𝐿(ℝ, 𝑛)| 𝐴𝐴+ = 𝐴+𝐴 = 𝑖𝑑 }
𝑆𝑈(𝑛) = {𝐴 ∈ 𝐺𝐿(ℂ, 𝑛)|det 𝐴 = 1 }
Avec A une matrice carrée de rang n.
1- Monter que 𝑈(1) ≅ 𝕊1
2- Monter que 𝑆𝑈(2) ≅ 𝕊3
Réponse.
1- Pour n=1 on a 𝑈(1) = {𝐴 ∈ 𝐺𝐿(ℝ, 1)| 𝐴𝐴+ = 𝐴+𝐴 = 𝑖𝑑𝑛 } dans ce cas A n’est
plus une matrice mais c’est un nombre.
D’autre part la sphère 𝕊1 s’écrit 𝕊1 = {𝑒𝑖𝜃, 𝜃 ∈ [0,2𝜋]2𝜋}, 𝑒𝑖𝜃 est un nombre
et de plus 𝑒𝑖𝜃 × (𝑒𝑖𝜃)+= 𝑒𝑖𝜃𝑒−𝑖𝜃 = 1 = 𝑖𝑑1 alors 𝑈(1) ≅ 𝕊1.
2- Pour n=2 on a 𝑆𝑈(2) = {𝐴 ∈ 𝐺𝐿(ℂ, 2)|det 𝐴 = 1 } dans ce cas A une matrice
carré de rang 2 avec des éléments complexes tel que
𝐴 = (𝑎 𝑏−𝑏∗ 𝑎∗
)

41
Avec 𝑎 = 𝑥1 + 𝑖𝑥2 et 𝑏 = 𝑥3 + 𝑖𝑥4
On a det 𝐴 =𝑎𝑎∗ + 𝑏𝑏∗ = 1
On trouve une équation d’une sphère à 4 dimension
det 𝐴 =𝑥12 + 𝑥2
2 + 𝑥32 + 𝑥4
2 = 1
𝑆𝑈(2) ≅ 𝕊3
3.3.2 Groupe avec un paramètre
3.3.2.1 Définition
Soit 𝑀 une variété différentiable de dimension 𝑛 définit par un atlas (𝑈𝑖, 𝜑𝑖).
Et une application différentiable 𝜙:ℝ ×𝑀 → 𝑀 satisfait aux propriétés
suivantes :
Pour tout𝛼 ∈ ℝ, l’application 𝜙𝛼 difféomorphisme de la variété M, définie par :
𝜙𝛼: 𝑥 → 𝜙(𝛼, 𝑥)
Soit 𝐷𝑖𝑓𝑓(𝑀) l’ensemble des difféomorphismes de la variété M. Alors
𝛼 → 𝜙𝛼
Est un homomorphisme de (𝐷𝑖𝑓𝑓(𝑀))𝑜 vers (ℝ)+, soit deux scalaires (𝛼, 𝛽) ∈ ℝ
𝜙𝛼𝑜𝜙𝛽 = 𝜙𝛼+𝛽
𝜙𝛼−1 = 𝜙−𝛼
𝜙0 = 𝑖𝑑(𝑀)
Exemple.
Soit 𝑀 = ℝ3 et 𝜙:ℝ × ℝ3 → ℝ3 l’application
𝜙(𝛼, (𝑥, 𝑦, 𝑧)) = (𝛼 − 𝑦 + 𝑥, 𝑦, 𝑧)
Est un groupe à un paramètre de difféomorphisme de 𝑀 = ℝ3
Exercice.
1- Monter que 𝜙𝛼𝑜𝜙𝛼−1 = 𝑖𝑑(𝑀)
2- On définit la puissance composé d’une application par 𝜙𝛼𝛾: = (𝜙𝛼)
𝑜(𝛾)
Montrer que (𝜙𝛼)𝑜(𝛾) = 𝜙𝛼𝛾 et que (𝜙𝛼)
𝑜(𝛾) ≔ 𝜙𝛼𝑜…𝑜𝜙𝛼⏟ 𝛾 𝑓𝑜𝑖𝑠
3- Monter la symétrie (𝜙𝛼)𝑜(𝛾) = (𝜙𝛾)
𝑜(𝛼)

42
4- Soit |𝛼| < 휀 monter pour que |𝛼
𝛽| < 휀 la formule 𝜙𝛼 = (𝜙𝛼
𝛽)𝑜(𝛽)
Réponse
1-
𝜙𝛼𝑜𝜙−𝛼 = 𝜙0
𝜙𝛼𝑜𝜙𝛼−1 = 𝑖𝑑(𝑀)
2-
𝜙𝛼𝛾 = 𝜙𝛼+⋯+𝛼⏟ 𝛾 𝑓𝑜𝑖𝑠
𝜙𝛼𝛾 = 𝜙𝛼𝑜…𝑜𝜙𝛼⏟ 𝛾 𝑓𝑜𝑖𝑠
𝜙𝛼𝛾 = 𝜙𝛼𝑜…𝑜𝜙𝛼⏟ 𝛾 𝑓𝑜𝑖𝑠
𝜙𝛼𝛾 = (𝜙𝛼)𝑜(𝛾)
Puisque 𝛼, 𝛾 ∈ ℕ
3-
On a (𝜙𝛼)𝑜(𝛾) = 𝜙𝛼𝑜…𝑜𝜙𝛼⏟
𝛾 𝑓𝑜𝑖𝑠
= 𝜙𝛾𝑜…𝑜𝜙𝛾⏟ 𝛼 𝑓𝑜𝑖𝑠
= (𝜙𝛾)𝑜(𝛼)
4- 𝜙𝛼 = 𝜙𝛼𝛽𝛽
= 𝜙𝛼𝛽𝛽 = 𝜙𝛼
𝛽𝑜…𝑜𝜙𝛼
𝛽= (𝜙𝛼
𝛽)𝑜(𝛽)
3.4 Applications des champs
3.4.1 Pull back et push forward de 𝝓
Soit 𝜙 une application d’une variété N vers une variété M, avec l’inverse 𝜙−1,
pour les éléments 𝑥 ∈ 𝑀 et 𝑦 ∈ 𝑁 et deux champs 𝑋 ∈ 𝔛(𝑀) et 𝑌 ∈ 𝔛(𝑁) on définit
Le pull back de 𝜙 est 𝜙∗: 𝔛(𝑀) → 𝔛(𝑁) tel que
(𝜙∗𝑋)(𝑦) ≔ 𝑑𝜙𝑦−1(𝑋𝜙𝑦)
Le push forward de 𝜙 est 𝜙∗: 𝔛(𝑁) → 𝔛(𝑀) tel que
(𝜙∗𝑌)(𝑥) ≔ 𝑑𝜙𝑦−1(𝑋𝑦)

43
Propriété
Soit 𝜙 une application entre deux variétés différentiables, et 𝑓 une application
𝜙∗𝑓 = 𝑓𝑜𝜙
3.4.2 Flots
Une courbe 𝑐(𝑡): 𝐼 → 𝑀 qui passe par un point 𝑥 de la variété 𝑀 tel que 𝑐(0) = 𝑥
𝑐(𝑡) dit intégrale si pour chaque champs 𝑋 ∈ 𝔛(𝑀) on a
𝜕𝑐(𝑡)
𝜕𝑡= 𝑋𝑐(𝑡)
En coordonnées locales �̇�𝑖(𝑡) = 𝑋𝑖(𝑥1(𝑡), … , 𝑥𝑛(𝑡)) 𝑖 = 1,… , 𝑛
Le flot est une application noté 𝜙𝑋, qui représente chaque champ 𝑋 ∈ 𝔛(𝑀) vers
une variété M par
𝜙𝑋: ℝ → 𝐷𝑖𝑓𝑓(𝑀)
𝑡 → 𝜙𝑋
Définie en chaque point 𝑥 ∈ 𝑀 par
𝜙𝑡𝑋(𝑥) ≔ 𝑐(𝑡) 𝜙0
𝑋(𝑥) ≔ 𝑐(0) = 𝑥
Avec 𝑐(𝑡) est une courbe intégrale qui passe par 𝑥
On utilise l’équation définie précédemment de 𝑐(𝑡) on trouve par suite
𝜕𝜙𝑡𝑋(𝑥)
𝜕𝑡= 𝑋𝑐(𝑡)
L’application exponentielle est définie sur un élément d’algèbre de Lie 𝑋 ⊂ 𝔤 et
vers le groupe de Lie 𝐺 𝑒𝑥𝑝: 𝔤 → 𝐺 par
𝑑
𝑑𝑡exp 𝑡𝑋 = 𝑋
𝑔 exp(𝑡𝑋) := 𝜙𝑡𝑋(𝑔)
exp(𝑢𝑋) exp(𝑣𝑋) = exp((𝑢 + 𝑣)𝑋)
Lemme
Le flot d’un champ X est un groupe à paramètre qui vérifié

44
𝜙𝑡𝑋 = 𝑖𝑑(𝑀)
𝜙𝑢𝑋𝑜𝜙𝑣
𝑋 = 𝜙𝑢+𝑣𝑋
Preuve.
3.4.3 Dérivée de Lie
Considérons une variété différentiable (𝑀, 𝐴) de dimension 𝑛.
Soit 𝑋 ∈ 𝔛(𝑀) et 𝑌 ∈ 𝔛(𝑀) deux champs dans l’espace tangent de cette variété
Pour le champ de vecteurs 𝑋 on définit un flot local 𝜙𝑡𝑋 de 𝑋 au voisinage ouvert
𝑈 autour d’un point 𝑥 ∈ 𝑀, on définit alors la dérivée de Lie par rapport à 𝑋 par
𝐿𝑋: 𝔛(𝑀) → 𝔛(𝑀)
𝐿𝑋𝑌 = [𝑋, 𝑌]
𝐿𝑋𝑌 ≔ lim𝑡→0
((𝜙𝑡𝑋)∗𝑌)
𝑥− 𝑌𝑥
𝑡
Avec 𝜙𝑡𝑋:𝑀 → 𝑀 et (𝜙𝑡
𝑋)∗: 𝔛(𝑀) → 𝔛(𝑀)
Propositions
Soient 𝑋, 𝑌, 𝑍 ∈ 𝔛(𝑀) et 𝑓 une application différentiable, on a les propriétés
suivantes :
𝐿𝑋𝑌 =𝑑
𝑑𝑡((𝜙𝑡
𝑋)∗𝑌)
𝑡=0
𝐿𝑋+𝑌𝑍 = 𝐿𝑋𝑍 + 𝐿𝑌𝑍
𝐿𝑓𝑋𝑍 = 𝑓𝐿𝑋𝑍 + 𝑑𝑓 ∧ 𝑖(𝑋)𝑍
[𝐿𝑋 , 𝐿𝑌]𝑍 = 𝐿[𝑋,𝑌]𝑍
[𝐿𝑋𝑖(𝑌)]𝑍 = 𝑖([𝑋, 𝑌])𝑍
𝑓∗𝐿𝑋𝑍 = 𝐿𝑋𝑓∗𝑍
Avec 𝑖(𝑋) est le produit intérieur (voir chapitre 4).

45
Exercices
Exercice1.
Considérons les champs de vecteurs 𝑉 = 𝑥𝜕
𝜕𝑥+ 𝑦
𝜕
𝜕𝑦 et 𝑊 = 𝑥
𝜕
𝜕𝑦− 𝑦
𝜕
𝜕𝑥 ,définis sur
ℝ2,
1. Les champs de vecteurs 𝑉 et 𝑊 forment-il une base d'une algèbre de Lie ? Si
oui, quel type d'algèbre de Lie ?
2. Exprimer les deux champs de vecteurs en coordonnées polaires.
3. Calculer le crochet de Lie des deux champs exprimés en coordonnés polaires.
Comparer avec le résultat de 1.
Exercice2.
Soient 𝑈 =𝑑
𝑑𝑥 , 𝑉 = 𝑥
𝑑
𝑑𝑥 et 𝑊 = 𝑥2
𝑑
𝑑𝑥
Des champs de vecteurs sur ℝ.
1- Montrer que ces champs de vecteurs forment une algèbre de Lie sous le
commutateur.
2- Trouver la représentation adjointe de cette algèbre.
3- Trouver la forme de Killing.
4- Trouver l'opérateur de Casimir.

46
Chapitre 4
Formes différentielles
Notion : espace cotangent, le produit extérieur, le produit intérieur, la dérivée extérieure et la dérivée de Lie.
La forme différentielle est un être mathématique multilinéaires alternées sur
les espaces tangents d'une variété différentielle de dimension n .
La différentielle d'une fonction peut être regardée comme un champ de formes
linéaires : c'est le premier exemple de formes différentielles. Au-delà de cet
exemple on va voir plusieurs champs multilinéaires dont le degré p est appelé p-
forme.
Les formes différentielles permettent de définir des structures importantes,
comme les formes volumes, les formes symplectiques, les formes de contact ou
encore les connexions…
La manipulation des formes différentielles fait intervenir un certain nombre
d'opérations, dont le produit extérieur, le produit intérieur, la dérivée
extérieure et la dérivée de Lie. En particulier, la dérivée extérieure permet de
distinguer les formes fermées et les formes exactes. Cette distinction permet dans
un second temps de définir les espaces de cohomologie de De Rham.
Définition 1
Soit 𝑻𝒒𝒑 un tenseur de type (𝒑, 𝒒) s’écrit dans les bases d’espace tangent et
cotangent
𝑻𝒒𝒑= 𝑻
𝜷1…𝜷𝒒
𝜶1…𝜶𝒑 𝜕
𝜕𝒙𝜶1⨂⋯⨂
𝜕
𝜕𝒙𝜶𝒑⨂𝒅𝒙𝜷1⨂⋯⨂𝒅𝒙𝜷𝒒
Définition 2
On définit le produit extérieur ∧ dans l’espace cotangent par le tenseur
antisymétrique
𝑑𝑥𝛼 ∧ 𝑑𝑥𝛽 =1
2(𝑑𝑥𝛼⨂𝑑𝑥𝛽 − 𝑑𝑥𝛽⊗𝑑𝑥𝛼)
𝑑𝑥𝛼 ∧ 𝑑𝑥𝛼 = 0
𝑑𝑥𝛼 ∧ 𝑑𝑥𝛽 = −𝑑𝑥𝛽 ∧ 𝑑𝑥𝛼

47
Définition 3
Les éléments qui s’écrivent de cette façon 𝝎 = 𝒂𝜷1…𝜷𝒑𝒅𝒙𝜷1 ∧ ⋯∧ 𝒅𝒙𝜷𝒑 s’appelle : p-
Forme différentielle, si les 𝒂𝜷1…𝜷𝒑 sont différentiables.
Définition 4
Soit 𝑴 une variété différentiable de dimension n et de classe, et soit 𝑻∗𝑴 est fibré
cotangent des espaces tangents 𝑻𝒙∗𝑴 à la variété
4.1 p-forme différentielle
Soit 𝑥 ∈ 𝑀 et 𝜔 ∈ Λ𝑝(𝑇𝑥∗𝑀) avec 𝜔: 𝑀 → Λ𝑝(𝑇∗𝑀), avec Λ𝑝(𝑇∗𝑀) = ⋃ Λ𝑝(𝑇𝑥
∗𝑀)𝑥∈𝑀
Aussi il faut savoir que 𝑥𝜊𝜔 = 𝐼𝑑. Soit l’application Λ qui vérifié
(𝑎, 𝑏) → 𝑎 ∧ 𝑏 ∶ Λ𝑝(𝑇𝑥∗𝑀) × Λ𝑞(𝑇𝑥
∗𝑀) → Λ𝑝+𝑞(𝑇𝑥∗𝑀)
Soit 𝑎 une p-forme, 𝑏 une q-forme et 𝑐 une r-forme :
(𝑎 ∧ 𝑏)𝑐 = 𝑎 ∧ (𝑏 ∧ 𝑐)
𝑎 ∧ 𝑏 = (−1)𝑝𝑞 𝑏 ∧ 𝑎
𝑎 ∧ (𝑏 + 𝑐) = 𝑎 ∧ 𝑏 + 𝑎 ∧ 𝑐 𝑠𝑖 𝑞 = 𝑟
4.2 Base de calculs des formes différentielles
On change la notation pour bien simplifier les calculs, soit 𝑑𝑥𝛽1 ≔ 𝑑1.
4.2.1 une seule itération 𝚲𝒑
Soit 𝑑𝑥𝛽𝑖 ≔ 𝑑𝑖 ∈ Λ𝑝
Pour l’espace Λ1
𝑑1 = +𝑑1
Pour l’espace Λ2
𝑑1 ∧ 𝑑2 = −𝑑2 ∧ 𝑑1 → (−1) 1
= +𝑑1 ∧ 𝑑2 → (−1) 𝑝=2
Pour l’espace Λ𝑝=3
𝑑1 ∧ 𝑑2 ∧ 𝑑3 = −𝑑1 ∧ 𝑑3 ∧ 𝑑2 → (−1)1
= +𝑑3 ∧ 𝑑1 ∧ 𝑑2 → (−1)2

48
= −𝑑3 ∧ 𝑑2 ∧ 𝑑1 → (−1)𝑝=3
Généralement pour l’espace Λ𝑝
𝑑1 ∧ 𝑑2 ∧ …∧ 𝑑𝑝 = (−1)𝑝𝑑𝑝 ∧ 𝑑𝑝−1 ∧ …∧ 𝑑2 ∧ 𝑑1
4.2.2 deux itérations 𝚲𝒑 × 𝚲𝒒
Soient 𝑑𝑥𝛽𝑖 ≔ 𝑑𝑖 ∈ Λ𝑝 et 𝑑𝑥𝛼𝑗 ≔ 𝜎𝑗 ∈ Λ
𝑞 de deux formes différentes.
Pour l’espace Λ𝑝=2 × Λ𝑞=1
𝑑1 ∧ 𝑑2 ∧ 𝜎1 = −𝑑1 ∧ 𝜎1 ∧ 𝑑2 → (−1) 1
= +𝜎1 ∧ 𝑑1 ∧ 𝑑2 → (−1) 2×1
Pour l’espace Λ2 × Λ2
𝑑1 ∧ 𝑑2 ∧ 𝜎1 ∧ 𝜎2 = −𝑑1 ∧ 𝜎1 ∧ 𝑑2 ∧ 𝜎2 → (−1) 1
= +𝜎1 ∧ 𝑑1 ∧ 𝑑2 ∧ 𝜎2 → (−1) 2
= −𝜎1 ∧ 𝑑1 ∧ 𝜎2 ∧ 𝑑2 → (−1) 3
= +𝜎1 ∧ 𝜎2 ∧ 𝑑1 ∧ 𝑑2 → (−1) 2×2=4
Pour l’espace Λ3 × Λ2
𝑑1 ∧ 𝑑2 ∧ 𝑑3 ∧ 𝜎1 ∧ 𝜎2 = −𝑑1 ∧ 𝑑2 ∧ 𝜎1 ∧ 𝑑3 ∧ 𝜎2 → (−1)1
= +𝑑1 ∧ 𝜎1 ∧ 𝑑2 ∧ 𝑑3 ∧ 𝜎2 → (−1)2
= −𝜎1 ∧ 𝑑1 ∧ 𝑑2 ∧ 𝑑3 ∧ 𝜎2 → (−1)3
= +𝜎1 ∧ 𝑑1 ∧ 𝑑2 ∧ 𝜎2 ∧ 𝑑3 → (−1)4
= −𝜎1 ∧ 𝑑1 ∧ 𝜎2 ∧ 𝑑2 ∧ 𝑑3 → (−1)5
= +𝜎1 ∧ 𝜎2 ∧ 𝑑1 ∧ 𝑑2 ∧ 𝑑3 → (−1)𝑝×𝑞=6
Pour l’espace Λ𝑝 × Λ𝑞
𝑑1 ∧ 𝑑2 ∧ …∧ 𝑑𝑝 ∧ 𝜎1 ∧ 𝜎2 ∧ …∧ 𝜎𝑞 = (−1)𝑝×𝑞𝜎1 ∧ 𝜎2 ∧ …∧ 𝜎𝑞 ∧ 𝑑1 ∧ 𝑑2 ∧ …∧ 𝑑𝑝

49
Implique 𝑎(𝑝) ∧ 𝑏(𝑞) = (−1)𝑝×𝑞𝑏(𝑞) ∧ 𝑎(𝑝)
4.2.3 l’annihilation extérieure
Soit 𝑑𝑥𝛽𝑖 ≔ 𝑑𝑖 ∈ Λ𝑝 et la forme extérieure 𝔏𝑝 = 𝑑1 ∧ 𝑑2 ∧ …∧ 𝑑𝑝, on définit
l’annihilateur de 𝔏𝑝 par une forme extérieure qui fait disparaitre la forme initial
cette forme annihilateur par 𝔏𝑝 = 𝑑𝑝 ∧ 𝑑𝑝−1 ∧ …∧ 𝑑2 ∧ 𝑑1 tel que
𝔏𝑝 ∧ 𝔏𝑝 = 𝔏𝑝 ∧ 𝔏𝑝 = 0
Corollaire
1- 𝔏𝑝 ∧ 𝔏𝑝 = 0
2- 𝔏𝑝 = 𝔏𝑝
Preuve.
1- On sait 𝔏𝑝 = (−𝟏)𝒑𝔏𝑝
𝔏𝑝 ∧ 𝔏𝑝 = (−𝟏)𝒑𝔏𝑝 ∧ 𝔏𝑝 = 0
2- 𝔏𝑝 = (−𝟏)𝟐𝒑𝔏𝑝 = 𝔏𝑝
Proposition1
On définit le schnorkel extérieur par
𝔏�̃�(𝑛) = (−𝟏)𝒏𝒑𝔏𝑝 = {
𝔏𝑝 𝑠𝑖 𝑛 𝑝𝑎𝑖𝑟𝑒.
𝔏𝑝 𝑠𝑖 𝑛 𝑖𝑚𝑝𝑎𝑖𝑟𝑒.
Résultat
𝔏𝑝 ∧ 𝔏𝑞 = 𝔏�̃�(𝑝) ∧ 𝔏𝑝
Proposition2
La forme extérieure est invariance par la transformation 𝔏𝑝 → 𝔏�̃�(𝑞) par
l’application ∧ sur une autre forme 𝔏𝑞 c’est-à-dire
𝔏�̃�(𝑞) ∧ 𝔏�̃�(𝑝) = 𝔏𝑝 ∧ 𝔏𝑞
Preuve. (Simple)

50
4.3 Diagrammes de géo-formes
4.3.1 Proposition
L’espace vectoriel Λ𝑝(𝑇𝑥∗𝑀) (noté aussi Λ𝑥
𝑝 ou Λp) ou des p-forme différentielle
contient des éléments de la base 𝑑𝑥𝛽1 ∧ ⋯∧ 𝑑𝑥𝛽𝑝 et de la dimension
𝑑𝑖𝑚Λ𝑥𝑝 = (
𝑛𝑝) =
𝑛
𝑝!(𝑛−𝑝)!
Exemple 1
n=2 Possibilité des p-forme Dimension de p-forme
0-Formes fonction différentiable 𝑑𝑖𝑚𝛬𝑥0 = (
20) = 1
1-Formes 𝑑𝑥1 𝑑𝑥2 𝑑𝑖𝑚𝛬𝑥1 = (
21) = 3
2-Formes 𝑑𝑥1 ∧ 𝑑𝑥2 𝑑𝑖𝑚𝛬𝑥2 = (
22) = 1
Exemple 2
n=3 Possibilité des p-forme Dimension de p-forme
0-Formes fonction différentiable dimΛ𝑥0 = (
30) = 1
1-Formes 𝑑𝑥1 𝑑𝑥2 𝑑𝑥3 dimΛ𝑥1 = (
31) = 3
2-Formes 𝑑𝑥1 ∧ 𝑑𝑥2 𝑑𝑥1 ∧ 𝑑𝑥3 𝑑𝑥2 ∧ 𝑑𝑥3 dimΛ𝑥2 = (
32) = 3
3-Formes 𝑑𝑥1 ∧ 𝑑𝑥2 ∧ 𝑑𝑥3 dimΛ𝑥3 = (
33) = 1

51
4.3.2 Diagrammes de géo-formes
Soit 𝒞𝑛 un cercle de rayon 𝑟 = 1 dans le plan ℝ2, on définit sur cette cercle
l’ensemble des points {𝑝1, … , 𝑝𝑛} tel que l’angle entre chaque deux points
voisinages est la même c’est-à-dire 𝜃 = 𝑝1𝑝2̂ = 𝑝2𝑝3̂ = ⋯ = 𝑝𝑛−1𝑝𝑛̂ = 𝑝𝑛𝑝1̂, cela peut
nous idée à définir l’ange comme suite 𝜃 =2𝜋
𝑛, avec 𝑛 est le nombre des points
sur la cercle 𝒞𝑛.
on écrit
𝒞𝑛 = {(𝑝1, … , 𝑝𝑛) ∈ ℝ2, 𝑟 = 1, 𝜃 =
2𝜋
𝑛}
On représente ce cercle géométriquement par
On associer à chaque point 𝑝𝑖 𝑖 =,… , 𝑛, une forme différentielle 𝑑𝑥𝑖 𝑖 =,… , 𝑛.
Généralement pour 𝑛 points on a 𝑛-forme différentielle, autrement dit 𝒞𝑛 ≅ Λ𝑝𝑛𝑛
Exemple.
Soit l’espace de 3-forme Λ𝑥3 , on représente cette espace sur un cercle 𝒞3 par
𝒞3 = {(𝑝1, 𝑝2, 𝑝3) ∈ ℝ2, 𝑟 = 1, 𝜃 =
2𝜋
3}
Géométriquement le cercle est
Pour 1-forme sur 𝓒𝟑 : 𝒅𝒙𝟏, 𝒅𝒙𝟐, 𝒅𝒙𝟑
⋮
𝑝1
𝑝2
𝑝3
𝑝4 𝑝5
𝑝𝑛
𝑝6
𝜃 𝜃 𝜃
𝜃 𝜃 𝜃
𝑑𝑥1
𝑑𝑥2 𝑑𝑥3

52
On aura trois possibilité c’est-à-dire trois cercle élémentaire suivantes
Pour cette 1-forme on a trois possibilités i.e. dimΛ1 = (31) = 3
Pour 2-forme sur 𝓒𝟑 : 𝒅𝒙𝟏 ∧ 𝒅𝒙𝟐 ; 𝒅𝒙𝟐 ∧ 𝒅𝒙𝟑 et 𝒅𝒙𝟏 ∧ 𝒅𝒙𝟑
On aura trois possibilité c’est-à-dire trois cercle élémentaire suivantes
Pour cette 2-forme on a trois possibilités i.e. dimΛ2 = (32) = 3
Pour 3-forme sur 𝓒𝟑 : 𝒅𝒙𝟏 ∧ 𝒅𝒙𝟐 ∧ 𝒅𝒙𝟑
On aura une seule possibilité c’est-à-dire un seule cercle élémentaire suivante
Pour cette 2-forme on a trois possibilités i.e. dimΛ3 = (33) = 1.
Proposition1.
Soit dit 𝒞𝑛 qui représente les formes de Λ𝑝𝑛𝑛 on a
𝑑𝑥1
𝑑𝑥2 𝑑𝑥3
𝑑𝑥1 ∧ 𝑑𝑥2
𝑑𝑥2 𝑑𝑥2
𝑑𝑥1 𝑑𝑥1
𝑑𝑥3 𝑑𝑥3
𝑑𝑥2 ∧ 𝑑𝑥3 𝑑𝑥1 ∧ 𝑑𝑥3
𝑑𝑥1
𝑑𝑥2 𝑑𝑥3
𝑑𝑥1 ∧ 𝑑𝑥2 ∧ 𝑑𝑥3

53
𝒞𝑛 =⋃𝒞𝑖
𝑛
𝑖=1
C’est-à-dire 𝒞𝑘 ⊂ 𝒞𝑛; ∀𝑘 < 𝑛
Proposition2.
On définit le cardinale de par 𝒞𝑘 ∀𝑘 < 𝑛
𝑐𝑎𝑟𝑑 𝒞𝑘 = 𝑑𝑖𝑚Λ𝑘
Exercice1.
Donner la géo-forme de la forme suivante 𝜔 = 𝑎𝑑𝑥1 ∧ 𝑑𝑥2 ∧ 𝑑𝑥3 ∧ 𝑑𝑥4
Réponse : est un cercle de rayon 𝑎 et de 4 points et de 𝜃 =2𝜋
4
4.4 Produit intérieur
Soit 𝜔 une p-forme différentiable sur Λ𝑝 = Λ𝑝(𝑇𝑥∗𝑀), et le champ des vecteur 𝑋 sur
la variété différentiable 𝑀 de dimension 𝑛, on note 𝑖(𝑋)𝜔 le produit intérieur de
champ 𝑋 par 𝜔 est de p-1-forme, on dit aussi que 𝒊 transforme tout p-forme en
une p+1-forme
𝑖(𝑋)𝜔(𝑋1, … , 𝑋𝑝−1) = 𝜔(𝑋, 𝑋1, … , 𝑋𝑝)
𝜔 → 𝑖(𝑋)𝜔: 𝛬𝑝 → 𝛬𝑝−1
𝑖: 𝛬𝑝 → 𝛬𝑝−1
Exemple en physique : L’opérateur 𝑎 d’annihilation transforme chaque état |𝑛⟩
vers un état inférieur |𝑛 − 1⟩
Soit le champ 𝑋, 𝑌 ∈ 𝔛(𝑀) et 𝑓 ∈ Λ0 (de 0 -forme) Vérifié les propriétés :

54
𝑖(𝑋 + 𝑌) = 𝑖(𝑋) + (𝑌)
𝑖(𝑓𝑋) = 𝑓𝑖(𝑋)
𝑖(𝑋)𝑖(𝑌) = −𝑖(𝑌)𝑖(𝑋)
𝑖(𝑋)𝑖(𝑋) = 0
Proposition
Soit 𝑎 une p-forme et b une q-forme on a
𝑖(𝑋)(𝑎 ∧ 𝑏) = (𝑖(𝑋)𝑎) ∧ 𝑏 + (−1)𝑝𝑎 ∧ (𝑖(𝑋)𝑏)
Pour un élément de base
𝑖(𝑒𝑟𝑘)(𝑑𝑥𝑟1 ∧ …∧ 𝑑𝑥𝑟𝑝) = (−1)𝑘−1𝑑𝑥𝑟1 ∧ …∧ 𝑑𝑥𝑟𝑘−1 ∧ 𝑑𝑥𝑟𝑘+1 ∧ …∧ 𝑑𝑥𝑟𝑝
On note parfois
𝑖(𝑒𝑟𝑘)(𝑑𝑥𝑟1 ∧ …∧ 𝑑𝑥𝑟𝑝) = (−1)𝑘−1𝑑𝑥𝑟1 ∧ …∧ 𝑑𝑥𝑟�̂� ∧ …∧ 𝑑𝑥𝑟𝑝
𝑖(𝑒𝑟𝑘)(𝑑𝑥𝑟1 …∧ 𝑑𝑥𝑟�̂� ∧ …𝑑𝑥𝑟𝑝) = 0
Exemple : sur ℝ3
𝑖(𝑒𝑥⃗⃗ ⃗)(𝑑𝑥 ∧ 𝑑𝑦) = 𝑑𝑦
𝑖(𝑒𝑥⃗⃗ ⃗)(𝑑𝑧 ∧ 𝑑𝑥) = −𝑑𝑧
𝑖(𝑒𝑥⃗⃗ ⃗)(𝑑𝑦 ∧ 𝑑𝑧) = 0
4.5 Dérivée extérieure
Soit 𝝎 une p-formes différentiable sur Λ𝑝 ⊂ ℝ𝑛 un ouvert de ℝ𝑛 autour d’un point
𝑥 et la fonction 𝑓 ∈ Λ0.
On exprime 𝑎 dans un système des coordonnées (𝑥1, … , 𝑥𝑛) est
𝑎 = 𝜎𝛽1…𝛽𝑝𝑑𝑥𝛽1 ∧ ⋯∧ 𝑑𝑥𝛽𝑝
En définissant la dérivée extérieure par tout application noté 𝑑 sur un ouvert 𝑈
qui transforme toutes p-forme en une p+1-forme
𝑑: Λ𝑝 → Λ𝑝+1

55
Exemple en physique : L’opérateur 𝑎+ d’annihilation transforme chaque état |𝑛⟩ vers un
état supérieur |𝑛 + 1⟩
L’application de 𝒅 sur la p-forme 𝒂 définit par
𝑑𝑎 = 𝑑𝜎𝛽1…𝛽𝑝𝑑𝑥𝛽1 ∧ ⋯∧ 𝑑𝑥𝛽𝑝
𝑑𝑎 =𝜕
𝜕𝑥𝑖(𝜎𝛽1…𝛽𝑝)𝑑𝑥
𝑖 ∧ 𝑑𝑥𝛽1 ∧ ⋯∧ 𝑑𝑥𝛽𝑝
Soient les deux forme 𝑎 ∈ Λ𝑝, 𝑏 ∈ Λ𝑞, Vérifié les propriétés :
𝑑(𝑎 + 𝑏) = 𝑑𝑎 + 𝑑𝑏
𝑑(𝑎 ∧ 𝑏) = 𝑑𝑎 ∧ 𝑏 + (−1)𝑝𝑎 ∧ 𝑑𝑏
𝑑2 = 𝑑𝜊𝑑 = 0
Preuve.
Soit 𝑎 = 𝜎𝛼1…𝛼𝑝𝑑𝑥𝛼1 ∧ ⋯∧ 𝑑𝑥𝛼𝑝 ∈ Λ𝑝 et 𝑏 = 𝜌𝛽1…𝛽𝑝𝑑𝑥
𝛽1 ∧ ⋯∧ 𝑑𝑥𝛽𝑞 ∈ Λ𝑞
𝑑(𝑎 ∧ 𝑏) =𝜕
𝜕𝑥𝑖(𝜎𝛼1…𝛼𝑝𝜌𝛽1…𝛽𝑝) 𝑑𝑥
𝑖 ∧ 𝑑𝑥𝛼1 ∧ ⋯∧ 𝑑𝑥𝛼𝑝 ∧ 𝑑𝑥𝛽1 ∧ ⋯∧ 𝑑𝑥𝛽𝑞
𝑑(𝑎 ∧ 𝑏) = (𝜕
𝜕𝑥𝑖(𝜎𝛼1…𝛼𝑝) 𝜌𝛽1…𝛽𝑝 + 𝜎𝛼1…𝛼𝑝
𝜕
𝜕𝑥𝑖(𝜌𝛽1…𝛽𝑝))𝑑𝑥
𝑖 ∧ 𝑑𝑥𝛼1 ∧ ⋯∧ 𝑑𝑥𝛼𝑝 ∧ 𝑑𝑥𝛽1 ∧ ⋯
∧ 𝑑𝑥𝛽𝑞
𝑑(𝑎 ∧ 𝑏) = 𝑑𝑎 ∧ 𝑏 + (𝜎𝛼1…𝛼𝑝𝜕
𝜕𝑥𝑖(𝜌𝛽1…𝛽𝑝))𝑑𝑥
𝑖 ∧ 𝑑𝑥𝛼1 ∧ ⋯∧ 𝑑𝑥𝛼𝑝 ∧ 𝑑𝑥𝛽1 ∧ ⋯∧ 𝑑𝑥𝛽𝑞⏟ 𝑝𝑒𝑟𝑚𝑒𝑡𝑎𝑡𝑖𝑜𝑛
𝑑(𝑎 ∧ 𝑏) = 𝑑𝑎 ∧ 𝑏 + (𝜎𝛼1…𝛼𝑝𝜕
𝜕𝑥𝑖(𝜌𝛽1…𝛽𝑝)) (−1)
𝑝𝑑𝑥𝑖 ∧ 𝑑𝑥𝛽1 ∧ ⋯∧ 𝑑𝑥𝛽𝑝 ∧ 𝑑𝑥𝛼1 ∧ ⋯
∧ 𝑑𝑥𝛼𝑞
Car nous avons utilisé la base de calculs
𝑑(𝑎 ∧ 𝑏) = 𝑑𝑎 ∧ 𝑏 + (−1)𝑝𝜎𝛼1…𝛼𝑝𝑑𝑥𝛽1 ∧ ⋯∧ 𝑑𝑥𝛽𝑝 ∧
𝜕
𝜕𝑥𝑖(𝜌𝛽1…𝛽𝑝)𝑑𝑥
𝑖 ∧ 𝑑𝑥𝛼1 ∧ ⋯∧ 𝑑𝑥𝛼𝑞
𝑑(𝑎 ∧ 𝑏) = 𝑑𝑎 ∧ 𝑏 + (−1)𝑝𝑎 ∧ 𝑑𝑏

56
Soit maintenant 𝜔 = 𝑟𝛼1…𝛼𝑝𝑑𝑥𝛼1 ∧ ⋯∧ 𝑑𝑥𝛼𝑝 ∈ Λ𝑝
𝑑𝜔 =𝜕
𝜕𝑥𝑖(𝑟𝛼1…𝛼𝑝) 𝑑𝑥
𝑖 ∧ 𝑑𝑥𝛼1 ∧ ⋯∧ 𝑑𝑥𝛼𝑝
𝑑𝑜𝑑𝜔 = 𝑑(𝑑𝜔) =𝜕
𝜕𝑥𝑗𝜕
𝜕𝑥𝑖(𝑟𝛼1…𝛼𝑝) 𝑑𝑥
𝑗 ∧ 𝑑𝑥𝑖 ∧ 𝑑𝑥𝛼1 ∧ ⋯∧ 𝑑𝑥𝛼𝑝
Puisque 𝑑𝑥𝑗 ∧ 𝑑𝑥𝑖 = −𝑑𝑥𝑖 ∧ 𝑑𝑥𝑗
𝑑𝑜𝑑𝜔 = −𝜕
𝜕𝑥𝑗𝜕
𝜕𝑥𝑖(𝑟𝛼1…𝛼𝑝) 𝑑𝑥
𝑖 ∧ 𝑑𝑥𝑗 ∧ 𝑑𝑥𝛼1 ∧ ⋯∧ 𝑑𝑥𝛼𝑝
𝑑𝑜𝑑𝜔 = −𝜕
𝜕𝑥𝑖𝜕
𝜕𝑥𝑗(𝑟𝛼1…𝛼𝑝) 𝑑𝑥
𝑖 ∧ 𝑑𝑥𝑗 ∧ 𝑑𝑥𝛼1 ∧ ⋯∧ 𝑑𝑥𝛼𝑝
Alors 𝑑𝑜𝑑𝜔 = −𝑑𝑜𝑑𝜔 donc 𝑑𝑜𝑑𝜔 = 0.
Proposition1.
Soit 𝑓 ∈ Λ0, on a 𝑑𝑓 =𝜕𝑓
𝜕𝑥𝑖𝑑𝑥𝑖 =
𝜕𝑓
𝜕𝑥1𝑑𝑥1 +
𝜕𝑓
𝜕𝑥2𝑑𝑥2 +⋯.(voir l’exercice 4.)
Proposition2.
Soit la 1-forme 𝜔 = ∑ 𝑓(𝑖 𝑥𝑖)𝑑𝑥𝑖 ∈ Λ1,la dérivée extérieure de 𝜔 est
𝑑𝜔 =∑𝜕𝑓(𝑥𝑖)
𝜕𝑥𝑗𝑖
𝑑𝑥𝑗 ∧ 𝑑𝑥𝑖 𝑖 ≠ 𝑗
On voit bien 𝑑𝜔 ∈ Λ2
Exemples
Pour 𝜔 = 𝑓(𝑥, 𝑦)𝑑𝑥 + 𝑔(𝑥, 𝑦)𝑑𝑦 ∈ Λ1 sa dérivée extérieure est
𝑑𝜔 =𝜕𝑓(𝑥, 𝑦)
𝜕𝑦𝑑𝑦 ∧ 𝑑𝑥 +
𝜕𝑔(𝑥, 𝑦)
𝜕𝑥𝑑𝑥 ∧ 𝑑𝑦
𝑑𝜔 = −𝜕𝑓(𝑥, 𝑦)
𝜕𝑦𝑑𝑥 ∧ 𝑑𝑦 +
𝜕𝑔(𝑥, 𝑦)
𝜕𝑥𝑑𝑥 ∧ 𝑑𝑦
𝑑𝜔 = (𝜕𝑔(𝑥, 𝑦)
𝜕𝑥−𝜕𝑓(𝑥, 𝑦)
𝜕𝑦)𝑑𝑥 ∧ 𝑑𝑦.

57
Pour 𝜔 = −𝜙𝑑𝑥 + 𝑎𝑖𝑑𝑦𝑖 avec 𝑖 = 1,2
𝑑𝜔 = −(𝜕𝑖𝜙𝑑𝑥 + 𝜕𝑡𝑎𝑖𝑑𝑦𝑖)𝑑𝑥𝑖 ∧ 𝑑𝑡 + 𝜕𝑗𝑎𝑖𝑑𝑥
𝑗 ∧ 𝑑𝑥𝑖
Avec
𝜕𝑗𝑎𝑖𝑑𝑥𝑗 ∧ 𝑑𝑥𝑖 =
𝜕
𝜕𝑥1𝑎2𝑑𝑥
1 ∧ 𝑑𝑥2 +𝜕
𝜕𝑥2𝑎1𝑑𝑥
2 ∧ 𝑑𝑥1
=𝜕
𝜕𝑥1𝑎2𝑑𝑥
1 ∧ 𝑑𝑥2 −𝜕
𝜕𝑥2𝑎1𝑑𝑥
1 ∧ 𝑑𝑥2
4.6. Opérateur de Hodge
Soit la p-forme 𝜔 = 𝑑𝑥𝑖1 ∧ …∧ 𝑑𝑥𝑖𝑝
On définit l’opérateur de Hodge ⋆ sur ℝ𝑛 par une (𝑛 − 𝑝)-forme noté ⋆ 𝜔 tel que
⋆ 𝜔 =⋆ 𝑑𝑥𝑖1 ∧ …∧ 𝑑𝑥𝑖𝑝 = 𝜖(𝜎)(𝑑𝑥𝑗1 ∧ …∧ 𝑑𝑥𝑗𝑛−𝑝)
Avec 𝑖1 < ⋯ < 𝑖𝑝 et 𝑗1 < ⋯ < 𝑗𝑛−𝑝
𝜎 = (𝑖1, … , 𝑖𝑝, 𝑗1, … , 𝑗𝑛−𝑝) est une perméation et 𝜖(𝜎) = 1 si 𝜎 dans le sens positif et
𝜖(𝜎) = −1 si 𝜎 dans le sens négatif, sinon 𝜖(𝜎) = 0.
L’opérateur de Hodge permet de transformer :
𝑝-forme ∈ Λ𝑝 en (𝑛 − 𝑝)-forme∈ Λ𝑛−𝑝.
Exemples
Soit l’espace de calculs est ℝ𝟐 on transforme 𝒑-forme en (𝟐 − 𝒑) −forme
Pour 𝑝 = 0 ⋆ 𝑓 = 𝑓𝑑𝑥1 ∧ 𝑑𝑥2
Pour 𝑝 = 1 ⋆ (𝛼𝑑𝑥1 + 𝛽𝑑𝑥2) = 𝛼𝑑𝑥2 − 𝛽𝑑𝑥1 1 ↻ 2
L’espace Λ𝑝 sur ℝ𝑛
Contient les
formes 𝜔
L’espace Λ𝑛−𝑝 sur ℝ𝑛
Contient les formes ⋆ 𝜔
L’espace Λ𝑛 sur ℝ𝑛 contient les formes 𝜔 et les formes ⋆ 𝜔

58
Pour 𝑝 = 2 ⋆ (𝛼𝑑𝑥1 ∧ 𝑑𝑥2) = 𝛼
Soit l’espace de calculs est ℝ𝟑 on transforme 𝒑-forme en (𝟑 − 𝒑) −forme
Pour 𝑝 = 0 ⋆ 𝑓 = 𝑓𝑑𝑥1 ∧ 𝑑𝑥2 ∧ 𝑑𝑥3
Pour 𝑝 = 1 ⋆ (𝛼𝑑𝑥1 + 𝛽𝑑𝑥2 + 𝛾𝑑𝑥3) = 𝛼𝑑𝑥2 ∧ 𝑑𝑥3 − 𝛽𝑑𝑥1 ∧ 𝑑𝑥3 + 𝛾𝑑𝑥1 ∧ 𝑑𝑥2
Pour 𝑝 = 2 ⋆ (𝛼𝑑𝑥1 ∧ 𝑑𝑥2 + 𝛽𝑑𝑥1 ∧ 𝑑𝑥3 + 𝛾𝑑𝑥2 ∧ 𝑑𝑥3) = 𝛼𝑑𝑥3 − 𝛽𝑑𝑥2 + 𝛾𝑑𝑥1
Pour 𝑝 = 3 ⋆ (𝛼𝑑𝑥1 ∧ 𝑑𝑥2 ∧ 𝑑𝑥3) = 𝛼
Lemme
Soit la p-forme 𝜔 = 𝑑𝑥𝑖1 ∧ …∧ 𝑑𝑥𝑖𝑝 , on a
⋆⋆ 𝜔 = (−1)𝑝(𝑛−𝑝)𝜔
Preuve.
On a 𝜔 ∈ Λ𝑝 et ⋆ 𝜔 ∈ Λ𝑛−𝑝 alors ⋆⋆ 𝜔 ∈ Λ𝑝 c’est-à-dire on fait un tournage entre les
deux espaces de formes :
Pour la suite (𝑖1 → ⋯ → 𝑖𝑝 → 𝑗1 → ⋯ → 𝑗𝑛−𝑝)
⋆ 𝜔 =⋆ 𝑑𝑥𝑖1 ∧ …∧ 𝑑𝑥𝑖𝑝 = 𝜖(𝜎)(𝑑𝑥𝑗1 ∧ …∧ 𝑑𝑥𝑗𝑛−𝑝)
⋆⋆ 𝜔 =⋆ 𝜖(𝜎)(𝑑𝑥𝑗1 ∧ …∧ 𝑑𝑥𝑗𝑛−𝑝)
(𝑗1 → ⋯ → 𝑗𝑛−𝑝 → 𝑖1 → ⋯ → 𝑖𝑝)
⋆⋆ 𝜔 = 𝜖(𝜎)𝜖′(𝜎)(𝑑𝑥𝑖1 ∧ …∧ 𝑑𝑥𝑖𝑝)
⋆⋆ 𝜔 = 𝜖(𝜎)𝜖′(𝜎)𝜔
1 → 2↖ 3 ↙
L’espace Λ𝑝
sur ℝ𝑛
L’espace Λ𝑛−𝑝
sur ℝ𝑛
Par l’opérateur de Hodge ⋆
Par l’opérateur de Hodge ⋆

59
On cherche d’abord la valeur de 𝜖(𝜎)𝜖′(𝜎) par la méthode d’inverser l’itération :
𝜖(𝜎)𝜖′(𝜎): 𝜎 = (𝑖1 → ⋯ → 𝑖𝑝) → (𝑗1 → ⋯ → 𝑗𝑛−𝑝)
On permet les 𝑗𝛼 dans le sens inverse :
𝜖(𝜎)𝜖′(𝜎): 𝜎 = {(−1)𝑝 × (𝑗1) → (𝑖1 → ⋯ → 𝑖𝑝) → (𝑗2 → ⋯ → 𝑗𝑛−𝑝)}
𝜖(𝜎)𝜖′(𝜎): 𝜎 = { (−1)2𝑝 × (𝑗1 → 𝑗2) → (𝑖1 → ⋯ → 𝑖𝑝) → (𝑗3 → ⋯ → 𝑗𝑛−𝑝)}
⋮
𝜖(𝜎)𝜖′(𝜎): 𝜎 = {(−1)(𝑛−𝑝)𝑝 × (𝑗1 → ⋯ → 𝑗𝑛−𝑝) → (𝑖1 → ⋯ → 𝑖𝑝)}
Alors 𝜖(𝜎)𝜖′(𝜎) = (−1)(𝑛−𝑝)𝑝
Cas particuliers
𝜖(123) = 1 ∶ 𝜎 = { (−1)0 × (1 → 2 → 3)}
𝜖(132) = −1 ∶ 𝜎 = { (−1)1 × (1 → 3 → 2)}
𝜖(312) = 1 ∶ 𝜎 = { (−1)2 × (3 → 1 → 2)}
Pour le produit sur ℝ6, on prend par exemple : 𝜖(𝜎 = 1234) et 𝜖′(𝜎 = 12)
𝜖(𝜎) × 𝜖′(𝜎) = 1: 𝜎 = { (−1)0 × (−1)0 × (1 → 2 → 3 → 4) → (1 → 2)}
𝜖(𝜎) × 𝜖′(𝜎) = −1: 𝜎 = { (−1)0 × (−1)1 × 1 → 2 → 3 → 4 → 2 → 1}
𝜖(𝜎) × 𝜖′(𝜎) = +1: 𝜎 = { (−1)0 × (−1)2 × 1 → 2 → 3 → 2 → 4 → 1}
𝜖(𝜎) × 𝜖′(𝜎) = −1: 𝜎 = { (−1)0 × (−1)3 × 1 → 2 → 2 → 3 → 4 → 1}
𝜖(𝜎) × 𝜖′(𝜎) = +1: 𝜎 = { (−1)0 × (−1)4 × 2 → 1 → 2 → 3 → 4 → 1}
𝜖(𝜎) × 𝜖′(𝜎) = −1: 𝜎 = { (−1)0 × (−1)4+1 × 2 → 1 → 2 → 3 → 1 → 4}
⋮
𝜖(𝜎) × 𝜖′(𝜎) = −1: 𝜎 = { (−1)0 × (−1)4+4 × 2 → 1 → 2 → 3 → 1 → 4}
Alors 𝜖(𝜎) × 𝜖′(𝜎) = (−1)4(6−4) = −1
Donc
⋆⋆ 𝜔 = (−1)(𝑛−𝑝)𝑝𝜔.

60
On appelle la Co-différentielle la forme suivante :𝛿 = (−1)𝑛(𝑝+1)+1 ⋆ 𝑑 ⋆.
Exemple.
𝛿𝑓 = 0
𝛿∑𝑎𝑖
𝑛
𝑖=1
𝑑𝑥𝑖 = −∑𝜕𝑎𝑖𝜕𝑥𝑖
𝑛
𝑖=1
= −∑𝜕𝑖𝑎𝑖
𝑛
𝑖=1
4.7 Variété orientable
Définition 4.7.1
On dit qu’une une variété différentielle M de dimension n muni d’un atlas
{(𝑈𝑙, 𝜑𝑙)} ,est orientable si on peut choisir une orientation de tous les espaces
tangents à cette variété pour qu’elle soit continue en chaque direction.
Mathématiquement il faut que les changements de cartes 𝜑𝑝𝑙 = 𝜑𝑙𝑜𝜑𝑝−1 aient un
jacobien positif 𝐝𝐞𝐭 𝒅𝝋𝒑𝒍 > 𝟎
Soit M une variété différentielle de dimension p. Alors M est orientable si et
seulement s’il existe une p-forme différentielle sur M qui ne s’annule nulle part.
Exemple.
La sphère 𝑆𝑛 ⊂ ℝ𝑛+1 est une variété orientable.
Proposition 4.7.2
- Toute variété compacte connexe de dimension 1 est orientable.
- Toute hypersurface compacte de ℝ𝑛 est orientable.
- Un produit de variétés orientables est orientable.
- Un groupe de Lie est une variété orientable.
Lemme 4.7.3
Si 𝑀 est une variété à bord orientée, 𝜕𝑀 est une variété (sans bord) orientée.

61
Démonstration
On voit en utilisant une carte locale que si 𝑥 est un point du bord, 𝑇𝑥𝑀 est divisé
en deux demi-espaces. On appelle demi-espace intérieur (resp. Extérieur) le
Demi-espace 𝑑𝜑(𝑥)−1(ℝ𝑝−1 × ]−∞, 0] × {0}) resp. 𝑑𝜑(𝑥)−1(ℝ𝑝−1 × [0,+∞[ × {0}) Ce qui nous permet de séparer entre deux classes de vecteurs non tangents à 𝜕𝑀:
les vecteurs pointant vers l’extérieur et ceux pointant vers l’intérieur de 𝑀.
Les seconds sont par exemple vecteurs tangents en 0 à une courbe 𝑐(𝑡) telle que
𝑐(0) = 𝑥 et 𝑐(𝑡) ∈ 𝑀 pour 𝑡 > 0. Soit alors 𝑣 un vecteur sortant.
On dira d’une base (𝑒1, … , 𝑒𝑛−1) de 𝑇𝑥𝜕𝑀 qu’elle est positivement orientée si la
base (𝑣, 𝑒1, … , 𝑒𝑛−1) de 𝑇𝑥𝑀 l’est aussi. Cela fournit une orientation continue
de𝑇𝑥𝜕𝑀.
4.8 Intégration des formes différentielles
4.8.1 Pull back des Formes différentielles
Propriétés
Soit 𝑓 une application lisse entre deux variétés différentiables 𝑀 et 𝑁.
Pour deux formes 𝑎 ∈ Λ𝑝 et 𝑏 ∈ Λ𝑝 :
𝑓∗(𝑎 + 𝑏) = 𝑓∗𝑎 + 𝑓∗𝑏
𝑓∗𝑑𝑎 = 𝑑(𝑓∗𝑎)
Et pour 𝑎 = 𝑑𝑥1 ∧ …∧ 𝑑𝑥𝑝
𝑓∗𝑑𝑥1 ∧ …∧ 𝑑𝑥𝑝 = det 𝑓 . 𝑑𝑥1 ∧ …∧ 𝑑𝑥𝑝
Pour deux formes 𝑎 ∈ Λ𝑝 et 𝑏 ∈ Λ𝑞 :
𝑓∗𝑎 ∧ 𝑏 = 𝑓∗𝑎 ∧ 𝑓∗𝑏
Prennent deux application lisses 𝑓: 𝑈 → 𝑉 et 𝑔: 𝑉 → 𝑊 sur une forme 𝑎 ∈ Λ𝑝
𝑓∗(𝑔𝑜𝑓)𝑎 = 𝑓∗(𝑔∗𝑎)
4.8.2 Intégration des 1-formes différentielles
Soit 𝜔 ∈ Λ1 une 1-forme différentielle dans une variété différentielle 𝑀
Pour un point 𝑥 ∈ 𝑀, on aura 𝜔(𝑥) ∈ T𝑥∗𝑀 est une forme linéaire. Et 𝛾: 𝐼 → 𝑀 une
courbe paramétrée régulière tracée sur M.
On définit l’intégrale de 𝜔 le longe de la courbe 𝛾 par

62
∫𝛾𝜔 = ∫
𝑡 𝜔(𝛾(𝑡)).
𝑑𝛾(t)
𝑑𝑡. 𝑑𝑡
Pour t ∈ 𝐼
Lemme
L’expression de 𝛾 modifiée �̃� = 𝛾𝑜𝜑:ℝ → ℝ𝑚. On a
∫�̃�𝜔 = ∫
𝛾𝜔
Preuve.
On a ∫𝑡 𝜔(�̃�(𝑡)).
𝑑�̃�(t)
𝑑𝑡. 𝑑𝑡 = ∫
𝑡 𝜔(𝛾(𝜑(𝑡))).
𝑑𝛾(𝜑(𝑡))
𝑑𝑡. 𝑑𝑡
Puisque 𝑑�̃�(𝑡)
𝑑𝑡=𝑑𝜑(𝑡)
𝑑𝑡.𝑑𝛾(𝜑(𝑡))
𝑑𝑡
∫𝑡 𝜔(�̃�(𝑡)).
𝑑�̃�(t)
𝑑𝑡. 𝑑𝑡 = ∫
𝑡 𝜔(𝛾(𝜑(𝑡))).
𝑑𝛾(𝜑(𝑡))
𝑑𝑡.𝑑𝜑(𝑡)
𝑑𝑡. 𝑑𝑡
On pose 𝑑𝑣 =𝑑𝜑(𝑡)
𝑑𝑡. 𝑑𝑡
∫𝑡 𝜔(�̃�(𝑡)).
𝑑�̃�(t)
𝑑𝑡. 𝑑𝑡 = ∫
𝑣 𝜔(𝛾(𝑣)).
𝑑𝛾(𝑣)
𝑑𝑡. 𝑑𝑣
= ∫𝑡 𝜔(𝛾(𝑡)).
𝑑𝛾(t)
𝑑𝑡. 𝑑𝑡
Cela représente que pour une intégration des 1-formes différentielles la
transformation �̃� = 𝛾𝑜𝜑 ne modifiée pas l’intégration, autrement dite, cette
transformation sera une méthode pour intégrer les 1-formes différentielles.
4.8.3 Intégration volumique des formes différentielles
Prenons une variété différentiable 𝑀 de dimension 𝑛, muni d’un atlas {(𝑈𝑖 , 𝜑𝑖)} paramétrisé par les coordonnées (𝑥1, … , 𝑥𝑛) , et puis on choisit une forme
différentielle 𝜔 de 𝐶∞ et de degré 𝑛 qui égale à la dimension de la variété 𝑀.
Pour chaque ouvert 𝑈𝑖 on lui associe une n-forme
𝜔|𝑈𝑖 = 𝑎𝑖𝑑𝑥1 ∧ …∧ 𝑑𝑥𝑛
Avec 𝑎𝑖 est une fonction lisse c’est-à-dire de classe 𝐶∞.
On définit l’intégrale de la n-forme 𝜔 sur un volume 𝑈𝑖 ⊂ 𝑀 de la variété M
sur 𝑉 ⊂ ℝ𝑛 paramétrisé par l’application 𝜑: 𝑉 → 𝑈𝑖 par
∫𝑈𝜔:= ∫
𝑉𝜑∗𝜔

63
Soit une application lisse (classe infini) 𝑓 ∶ 𝑈𝑗 ⊂ 𝑀 → 𝑉 ⊂ ℝ𝑛 qui relier chaque
point de cette variété vers une autre variété différentiable 𝑉 ⊂ ℝ𝑛, on définit
l’application 𝑓∗𝜔𝑥0 en un point 𝑥0 de 𝑀 par
𝑓∗𝜔𝑥0(𝑥1, … , 𝑥𝑛): = 𝜔𝑓(𝑥0)(𝑑𝑥0𝑓(𝑥1),… , 𝑑𝑥0𝑓(𝑥𝑛))
Soit (𝑒1, … , 𝑒𝑛) vecteurs de base canonique de ℝ𝑛, on a
∫𝑈𝜔 = ∫
𝑉𝜔𝜑(𝑥0)(𝑑𝑥0𝜑(𝑥1), … , 𝑑𝑥0𝜑(𝑥𝑛))𝑑𝑥0
4.9 formes différentielles exactes et fermées
Soit 𝜔 une p-forme différentielle définie sur un ouvert 𝑈 de ℝ𝑛,
4.9.1 Définition : 𝝎 exacte
Soit 𝜇 une (p-1) -forme différentielle sur 𝑈, sa déférentielle 𝑑𝜇.
On dit que 𝜔 est exacte si
𝜔 = 𝑑𝜇
Dans ce cas 𝑓 est dite primitive de 𝜔, pour calculer l’intégrale de 𝜔 à partir de
Cette primitive sur un chemin paramétrisé 𝛾: 𝐼 = [𝑎, 𝑏] → 𝑈 ⊂ ℝ𝑛 par
∫𝛾𝜔 = 𝑓(𝛾(𝑏)) − 𝑓(𝛾(𝑎))
4.9.2 Définition : 𝝎 fermée
On dit que 𝜔 est fermée si
𝑑𝜔 = 0
4.9.3 Proposition.
Toute forme exacte est aussi fermée.
Preuve.
Soit 𝜔 une forme exacte c’est-à-dire 𝜔 = 𝑑𝜇 ,et on a déjà comme propriété
𝑑𝑜𝑑 = 0
Exemple.
Pour 𝜔(𝑥, 𝑦, 𝑧) = 𝑦𝑧𝑑𝑥 − 𝑥𝑧𝑑𝑦 + 𝑥𝑦𝑑𝑧 ∈ Λ1(ℝ3), on a
𝑑𝜔 = 2𝑥𝑑𝑦 ∧ 𝑑𝑧 − 2𝑧𝑑𝑥 ∧ 𝑑𝑦 ≠ 0

64
Alors 𝜔 n’est pas fermé.
Pour Ω =𝑥
𝑥2+𝑦2𝑑𝑥 +
𝑦
𝑥2+𝑦2𝑑𝑦 ∈ Λ1(ℝ2\{(0,0)}) :
Ω est fermé car 𝑑Ω = 0, et aussi exacte sur ℝ2\{(0,0)} car Ω = 𝑑𝜇, telle que
𝜇(𝑥, 𝑦) =1
2ln(𝑥2 + 𝑦2) + 𝑐𝑡𝑒 ∈ ℝ2\{(0,0)}

65
Exercices corrigés
Exercice1. Soit 𝜔 = 𝑎(𝑥1, … , 𝑥𝑛)𝑑𝑥
1 ∧ …∧ 𝑑𝑥𝑛 une n-forme différentielle, et 𝑓 ∶ 𝑈 → 𝑉 ⊂ ℝ𝑛
une application. Calculer 𝑓∗𝜔
Note de réponse
𝑓∗𝜔 = 𝑓∗(𝑎(𝑥1, … , 𝑥𝑛)𝑑𝑥1 ∧ …∧ 𝑑𝑥𝑛)
= 𝐽(𝑓). 𝑎𝑜𝑓. 𝑑𝑥1 ∧ …∧ 𝑑𝑥𝑛
Lorsque 𝐽(𝑓) > 0, la formule de changement de variables dans ℝ𝑛 assure ainsi
que
∫𝑈𝑖𝜔 = ∫
𝑉𝜑∗𝜔 = ∫
𝑈𝑖(𝜑𝑜𝑓)∗𝜔
Exercice2.
On considère les formes 𝛼 = 𝑥 𝑑𝑥 − 𝑦 𝑑𝑦, 𝛽 = 𝑧 𝑑𝑥 ∧ 𝑑𝑦 + 𝑥 𝑑𝑦 ∧ 𝑑𝑧 𝑒𝑡 𝛾 = 𝑧 𝑑𝑦
sur ℝ3 Calculer
1. 𝛼 ∧ 𝛽, 𝛼 ∧ 𝛽 ∧ 𝛾 ;
2. 𝑑𝛼, 𝑑𝛽, 𝑑𝛾.
3. ⋆ 𝛼, ⋆ 𝛽, ⋆ 𝛾 , ⋆ 𝛼 et ⋆ (𝛼 ∧ 𝛽)
Réponse
1- 𝛼 ∧ 𝛽 = (𝑥 𝑑𝑥 − 𝑦 𝑑𝑦) ∧ (𝑧 𝑑𝑥 ∧ 𝑑𝑦 + 𝑥 𝑑𝑦 ∧ 𝑑𝑧)
𝛼 ∧ 𝛽 = 𝑥2 𝑑𝑥 ∧ 𝑑𝑦 ∧ 𝑑𝑧
Car 𝑑𝑥 ∧ 𝑑𝑥 = 0
On a 𝛼 ∧ 𝛽 ∧ 𝛾 = (𝛼 ∧ 𝛽 ) ∧ 𝛾
= 𝑧𝑥2 𝑑𝑥 ∧ 𝑑𝑦 ∧ 𝑑𝑧 ∧ 𝑑𝑦 = 0
2- On a 𝛼 ∈ Λ1, 𝛽 ∈ Λ2 et 𝛾 ∈ Λ1
𝑑𝛼 = 𝑑(𝑥 𝑑𝑥 − 𝑦 𝑑𝑦)
𝑑𝛼 = 𝜕𝑥
𝜕𝑦 𝑑𝑦 ∧ 𝑑𝑥 −
𝜕𝑦
𝜕𝑥 𝑑𝑥 ∧ 𝑑𝑦
𝑑𝛼 = 0
Car 𝜕𝑥
𝜕𝑦=𝜕𝑦
𝜕𝑥= 0

66
𝑑𝛽 = 𝑑(𝑧 𝑑𝑥 ∧ 𝑑𝑦) + 𝑑 (𝑥 𝑑𝑦 ∧ 𝑑𝑧)
On calcul d’abord 𝐼 = 𝑑(𝑧 𝑑𝑥 ∧ 𝑑𝑦) en utilisant deux propriétés (𝑑(𝑎 ∧ 𝑏) =
𝑑𝑎 ∧ 𝑏 + (−1)𝑝𝑎 ∧ 𝑑𝑏 et 𝑑2 = 𝑑𝜊𝑑 = 0).
𝐼 = 𝑑(𝑧 𝑑𝑥) ∧ 𝑑𝑦 + (−1)1𝑧 𝑑𝑥 ∧ 𝑑𝑑𝑦⏟=0
𝐼 = (𝜕𝑧
𝜕𝑦⏟=0
𝑑𝑦 ∧ 𝑑𝑥 +𝜕𝑧
𝜕𝑧𝑑𝑧 ∧ 𝑑𝑥) ∧ 𝑑𝑦
𝐼 = 𝑑(𝑧 𝑑𝑥 ∧ 𝑑𝑦) = 𝑑𝑧 ∧ 𝑑𝑥 ∧ 𝑑𝑦
De même on trouve 𝑑(𝑥 𝑑𝑦 ∧ 𝑑𝑧) = 𝑑𝑥 ∧ 𝑑𝑦 ∧ 𝑑𝑧
𝑑𝛽 = 𝑑𝑧 ∧ 𝑑𝑥 ∧ 𝑑𝑦 + 𝑑𝑥 ∧ 𝑑𝑦 ∧ 𝑑𝑧
𝑑𝛽 = 2𝑑𝑥 ∧ 𝑑𝑦 ∧ 𝑑𝑧
𝑑𝛾 = 𝑑(𝑧 𝑑𝑦)
𝑑𝛾 =𝜕𝑧
𝜕𝑧𝑑𝑧 ∧ 𝑑𝑦
𝑑𝛾 = 𝑑𝑧 ∧ 𝑑𝑦
3- Soit la pénétration positive 𝒅𝒙 → 𝒅𝒚 → 𝒅𝒛 , on va transformer p-forme en
(3-p) -forme, avec 𝑖𝑛𝑑(𝑑𝑥) < 𝑖𝑛𝑑(𝑑𝑦) < 𝑖𝑛𝑑(𝑑𝑧)
⋆ 𝛼 =⋆ (𝑥 𝑑𝑥 − 𝑦 𝑑𝑦)
= 𝑥 𝑑𝑦 ∧ 𝑑𝑧 + 𝑦 𝑑𝑥 ∧ 𝑑𝑧
⋆ 𝛽 = ⋆ 𝑧 𝑑𝑥 ∧ 𝑑𝑦
= 𝑧 𝑑𝑧
⋆ 𝛾 = −𝑧 𝑑𝑥 ∧ 𝑑𝑧
⋆ (𝛼 ∧ 𝛽) =⋆ 𝑥2 𝑑𝑥 ∧ 𝑑𝑦 ∧ 𝑑𝑧
= 𝑥2
Exercice3.
Soit deux formes :
𝛼 = 𝑥𝑑𝑥 + 𝑦𝑑𝑦 ∈ Λ1 sur ℝ2.
𝛽 = 𝑦𝑑𝑥 − 𝑥𝑑𝑦 ∈ Λ1 sur ℝ2.

67
Et un champ de vecteurs 𝑉(𝑥, 𝑦) = sin 𝑥 .𝜕
𝜕𝑥+ sin 𝑦 .
𝜕
𝜕𝑦 sur ℝ2
1- Calculer 𝛼 ∧ 𝛽.
2- Calculer 𝛽(𝑉).
Réponse.
1- 𝛼 ∧ 𝛽 = −(𝑥2 + 𝑦2)𝑑𝑥 ∧ 𝑑𝑦
2- 𝛽(𝑉) = 𝑦𝑑𝑥(sin 𝑥 .𝜕
𝜕𝑥+ sin 𝑦 .
𝜕
𝜕𝑦) − 𝑥𝑑𝑦(sin 𝑥 .
𝜕
𝜕𝑥+ sin 𝑦 .
𝜕
𝜕𝑦)
= 𝑦 sin 𝑥 . 𝑑𝑥𝜕
𝜕𝑥+ 𝑦 sin 𝑦 . 𝑑𝑥
𝜕
𝜕𝑦− 𝑥 sin 𝑥 . 𝑑𝑦
𝜕
𝜕𝑥− 𝑥 sin 𝑦 . 𝑑𝑦
𝜕
𝜕𝑦
= 𝑦 sin 𝑥 . ⟨𝑑𝑥,𝜕
𝜕𝑥⟩
⏟ =1
+ 𝑦 sin 𝑦 . ⟨𝑑𝑥,𝜕
𝜕𝑦⟩
⏟ =0
− 𝑥 sin 𝑥 . ⟨𝑑𝑦,𝜕
𝜕𝑥⟩
⏟ =0
− 𝑥 sin 𝑦 . ⟨𝑑𝑦,𝜕
𝜕𝑦⟩
⏟ =1
Car ⟨𝑑𝑥𝑖 ,𝜕
𝜕𝑥𝑗⟩ = 𝛿𝑗
𝑖 = {1 𝑖 = 𝑗0 𝑖 ≠ 𝑗
Alors
𝛽(𝑉) = 𝑦 sin 𝑥 − 𝑥 sin 𝑦
Exercice4.
Soit 𝜔 =−𝑦
𝑥2+𝑦2𝑑𝑥 +
𝑥
𝑥2+𝑦2𝑑𝑦 et on pose 𝜃 =
𝑥
√𝑥2+𝑦2 et 𝜑 =
𝑦
√𝑥2+𝑦2 , monter que
𝜔 = 𝜃𝑑𝜑 − 𝜑𝑑𝜃 ≔ 𝜃𝑑𝜑
Réponse.
La base des cordonnées s’écrit
On a 𝑑𝜃 =𝜕𝜃
𝜕𝑥𝑖𝑑𝑥𝑖 =
𝜕𝜃
𝜕𝑥𝑑𝑥 +
𝜕𝜃
𝜕𝑦𝑑𝑦
𝜕𝜃
𝜕𝑥=
𝑦2
√(𝑥2 + 𝑦2)3 ,𝜕𝜃
𝜕𝑦=
−𝑥𝑦
√(𝑥2 + 𝑦2)3
𝑑𝜃 =𝑦2
√(𝑥2 + 𝑦2)3𝑑𝑥 +
−𝑥𝑦
√(𝑥2 + 𝑦2)3𝑑𝑦 (∗)
De même 𝑑𝜑 =𝜕𝜑
𝜕𝑥𝑖𝑑𝑥𝑖 =
𝜕𝜑
𝜕𝑥𝑑𝑥 +
𝜕𝜑
𝜕𝑦𝑑𝑦

68
𝜕𝜑
𝜕𝑥=
−𝑥𝑦
√(𝑥2 + 𝑦2)3 ,𝜕𝜑
𝜕𝑦=
𝑥2
√(𝑥2 + 𝑦2)3
𝑑𝜑 =−𝑥𝑦
√(𝑥2 + 𝑦2)3 𝑑𝑥 +
𝑥2
√(𝑥2 + 𝑦2)3𝑑𝑦 (∗∗)
On remplace (*) et (**) dans l’équation 𝜃𝑑𝜑 − 𝜑𝑑𝜃 :
𝜃𝑑𝜑 − 𝜑𝑑𝜃 =1
(𝑥2 + 𝑦2)2(−𝑦(𝑥2 + 𝑦2)𝑑𝑥 + 𝑥(𝑥2 + 𝑦2)𝑑𝑦)
𝜃𝑑𝜑 − 𝜑𝑑𝜃 =−𝑦
𝑥2 + 𝑦2𝑑𝑥 +
𝑥
𝑥2 + 𝑦2𝑑𝑦
Alors 𝜔 = 𝜃𝑑𝜑 − 𝜑𝑑𝜃.
Exercice5.
1- Montrer que la forme déférentielle 𝜔 = (𝑥 + 𝑦) 𝑑𝑥 + (𝑥 − 𝑦) 𝑑𝑦 est exacte.
2- Déterminer une primitive de 𝜔.
3- Résoudre alors l'équation déférentielle 𝑥 + 𝑦 + (𝑥 − 𝑦)𝑦′ = 0
Dont l'inconnue est la fonction y de la variable réelle x.
Exercice6.
Le laplacien ∆𝑓 d'une fonction lisse 𝑓 sur un ouvert de ℝ𝑛 est défini par
∆𝑓 =∑𝜕2𝑓
𝜕𝑥𝑖2
𝑛
𝑖=1
Montrer
1- ∆𝑓 =⋆ 𝑑 ⋆ 𝑑𝑓
2- ∆(𝑓𝑔) = (∆𝑓)𝑔 + 𝑓∆𝑔 + 2 ⋆ (𝑑𝑓(⋆ 𝑑𝑔))
Réponse.
1- Généralement L’opérateur de Hodge permet de transformer 𝑝-forme ∈ Λ𝑝
en (𝑛 − 𝑝)-forme∈ Λ𝑛−𝑝.
On a 𝑓 ∈ Λ0 et sa dérivée extérieure 𝑑𝑓 = 𝜕𝑖𝑓. 𝑑𝑥𝑖 = ∑ 𝜕𝑖𝑓. 𝑑𝑥
𝑖𝑛𝑖=1 ∈ Λ1 et puisque
on définit f sur ℝ𝑛 c’est-à-dire ⋆ 𝑓 ∈ Λ𝑛−0 et ⋆ 𝑑𝑓 ∈ Λ𝑛−1
⋆ 𝑑𝑓 =∑𝜕𝑖𝑓. 𝑑𝑥𝑖1 ∧ …∧ 𝑑𝑥𝑖𝑛−1
𝑛
𝑖=1
69
Tel que 𝑖 < 𝑖1 < ⋯ < 𝑖𝑛−1
𝑑 ⋆ 𝑑𝑓 = 𝑑 (∑𝜕𝑖𝑓. 𝑑𝑥𝑖1 ∧ …∧ 𝑑𝑥𝑖𝑛−1
𝑛
𝑖=1
)
=∑𝜕𝑘𝜕𝑖𝑓. 𝑑𝑥𝑘 ∧ 𝑑𝑥𝑖1 ∧ …∧ 𝑑𝑥𝑖𝑛−1
𝑛
𝑖=1
𝑑 ⋆ 𝑑𝑓 =∑𝜕𝑖𝜕𝑖𝑓. 𝑑𝑥𝑖 ∧ 𝑑𝑥𝑖1 ∧ …∧ 𝑑𝑥𝑖𝑛−1
𝑛
𝑖=1
On voit bien que 𝑑 ⋆ 𝑑𝑓 ∈ Λ𝑛 ⇒⋆ (𝑑 ⋆ 𝑑𝑓) ∈ Λ𝑛−𝑛 = Λ0 :
⋆ 𝑑 ⋆ 𝑑𝑓 =⋆∑𝜕𝑖𝜕𝑖𝑓. 𝑑𝑥𝑖 ∧ 𝑑𝑥𝑖1 ∧ …∧ 𝑑𝑥𝑖𝑛−1
𝑛
𝑖=1
=∑𝜕𝑖2𝑓
𝑛
𝑖=1
⋆ 𝑑 ⋆ 𝑑𝑓 =∑𝜕2𝑓
𝜕𝑥𝑖2
𝑛
𝑖=1
= ∆𝑓
2- On veut montrer ∆(𝑓𝑔) = (∆𝑓)𝑔 + 𝑓∆𝑔 + 2 ⋆ (𝑑𝑓(⋆ 𝑑𝑔))
On a ∆(𝑓𝑔) = ∑𝜕2𝑓𝑔
𝜕𝑥2𝑛𝑖=1
∆(𝑓𝑔) =∑𝜕2𝑓
𝜕𝑥𝑖2
𝑛
𝑖=1
𝑔 +∑𝑓𝜕2𝑔
𝜕𝑥𝑖2
𝑛
𝑖=1
+ 2∑𝜕𝑓
𝜕𝑥𝑖
𝑛
𝑖=1
𝜕𝑔
𝜕𝑥𝑖
∆(𝑓𝑔) = (∆𝑓)𝑔 + 𝑓∆𝑔 + 2∑𝜕𝑓
𝜕𝑥𝑖
𝑛
𝑖=1
𝜕𝑔
𝜕𝑥𝑖
Alors il faut monter que ∑𝜕𝑓
𝜕𝑥𝑖
𝑛𝑖=1
𝜕𝑔
𝜕𝑥𝑖=⋆ (𝑑𝑓(⋆ 𝑑𝑔))
𝑑𝑓(⋆ 𝑑𝑔) =∑𝜕𝑖𝑓. 𝑑𝑥𝑖
𝑛
𝑖=1
.∑𝜕𝑗𝑔. 𝑑𝑥𝑗1 ∧ …∧ 𝑑𝑥𝑗𝑛−1
𝑛
𝑗=1
=∑𝜕𝑗𝑓. 𝜕𝑗𝑔. 𝑑𝑥𝑗1 ∧ 𝑑𝑥𝑗2 ∧ …∧ 𝑑𝑥𝑗𝑛
𝑛
𝑗=1

70
On voit bien que 𝑑𝑓(⋆ 𝑑𝑔) ∈ Λ𝑛 ⇒⋆ (𝑑𝑓(⋆ 𝑑𝑔)) ∈ Λ𝑛−𝑛 = Λ0, alors
⋆ (𝑑𝑓(⋆ 𝑑𝑔)) =∑𝜕𝑗𝑓. 𝜕𝑗𝑔
𝑛
𝑗=1
=∑𝜕𝑓
𝜕𝑥𝑖
𝑛
𝑖=1
𝜕𝑔
𝜕𝑥𝑖
Exercice7.
Calculer la dérivée extérieure de ces deux formes
𝑒𝑥𝑦+𝑧2𝑑𝑥
∑𝑥𝑖2
𝑛
𝑖=1
𝑑𝑥1 ∧ …∧ 𝑑�̂�𝑖 ∧ …∧ 𝑑𝑥𝑛
Le chapeau 𝑑�̂�𝑖 indique que le terme 𝑑𝑥𝑖 est omis.
Réponse.
𝑑𝑒𝑥𝑦+𝑧2𝑑𝑥 =
𝜕
𝜕𝑦𝑒𝑥𝑦+𝑧
2𝑑𝑦 ∧ 𝑑𝑥 +
𝜕
𝜕𝑧𝑒𝑥𝑦+𝑧
2𝑑𝑧 ∧ 𝑑𝑥
𝑑𝑒𝑥𝑦+𝑧2𝑑𝑥 = 𝑥𝑒𝑥𝑦+𝑧
2𝑑𝑦 ∧ 𝑑𝑥 + 2𝑧𝑒𝑥𝑦+𝑧
2𝑑𝑧 ∧ 𝑑𝑥
𝑑∑𝑥𝑖2
𝑛
𝑖=1
𝑑𝑥1 ∧ …∧ 𝑑�̂�𝑖 ∧ …∧ 𝑑𝑥𝑛 =∑𝜕𝑥𝑖
2
𝜕𝑥𝑗
𝑛
𝑖=1
𝑑𝑥𝑗 ∧ 𝑑𝑥1 ∧ …∧ 𝑑�̂�𝑖 ∧ …∧ 𝑑𝑥𝑛
Alors pour que sa dérivée extérieure ne soit pas nulle il faut que
𝑗 ≠ 1,… , 𝑖 − 1, 𝑖 + 1,…𝑛
Ce qui nous permet de dire que 𝑗 = 𝑖, dans ce cas :
𝑑∑𝑥𝑖2
𝑛
𝑖=1
𝑑𝑥1 ∧ …∧ 𝑑�̂�𝑖 ∧ …∧ 𝑑𝑥𝑛 =∑2𝑥𝑖
𝑛
𝑖=1
𝑑𝑥𝑖 ∧ 𝑑𝑥1 ∧ …∧ 𝑑�̂�𝑖 ∧ …∧ 𝑑𝑥𝑛
Et on place 𝑑𝑥𝑖 dans sa place entre 𝑑𝑥𝑖−1 et 𝑑𝑥𝑖+1
𝑑∑𝑥𝑖2
𝑛
𝑖=1
𝑑𝑥1 ∧ …∧ 𝑑�̂�𝑖 ∧ …∧ 𝑑𝑥𝑛 =∑(−1)𝑖−12𝑥𝑖
𝑛
𝑖=1
𝑑𝑥1 ∧ …∧ 𝑑𝑥𝑖 ∧ …∧ 𝑑𝑥𝑛

71
Chapitre 5
La géométrie Riemannienne
4.1 Introduction
La géométrie Riemannienne s’intéresse à étudier les variétés en utilisant
L’espace tangent au point x de la variété muni d’une base 𝑒𝑖 =𝜕
𝜕𝑥𝑖.
Et tout les champs de vecteurs dans cette espace s’écrivent toujours dans cette
base 𝑉 = 𝑉𝑖𝜕𝑖 avec 𝑉𝑖 des fonctions locales et aussi des valeurs propres de champ
De vecteur 𝑉 dans la base 𝑒𝑖 = {𝜕𝑖 =𝜕
𝜕𝑥𝑖 , 𝑖 = 1,… , 𝑛} . Dans la géométrie
Riemannienne cette valeur propre va nous permettre de trouver la mesure de
courbure en un point de la variété et muni d’un métrique ù qui mesure la
courbure de la variété M de dimension 𝑛 , de telle variété s’appelle variété
Riemannienne noté (𝑀, 𝑔).
Dans la géométrie riemannienne le plus important c’est l'étude des métriques
riemanniennes : une telle métrique est une famille de produits euclidiens sur une
variété différentielle. Cette métrique fait apparaître la variété comme un espace
euclidien selon un point de vue infinitésimal. Elle permet de généraliser les
notions de longueur de la courbe et de mesure, le gradient d'une fonction, de
la divergence, etc. la métrique rend la variété compliquée comme un sorte d’objet
réel qu’on le voit dans la vie quotidienne.
La nature géométrique de la dérivée seconde c’est important pour parler de la
notion de courbure de la géométrie Riemannienne, (peuvent être considérés
comme ceux qui englobent), enfaite la métrique représentée la courbure mais
puisque on s’interdisse à la dérivée seconde, on dérive la métrique deux fois pour
avoir la courbure de Riemann représenté par le tenseur de courbure de Riemann.
4.2 Métrique
La métrique 𝑔 est un tenseur ou un champ des vecteurs sur une variété
Différentiable (𝑀, 𝑔), et en chaque point 𝑥 ∈ 𝑀 on peut définir une métrique
autrement dit que la métrique d’une variété est définie sur l’espace tangent en 𝑥.
Et on forme la métrique à partir de l’espace cotangent 𝑔 ∈ 𝑇𝑥∗𝑀⨂𝑇𝑥
∗𝑀 et on écrit
𝑔 = 𝑔𝑖𝑗𝑑𝑥𝑖⨂𝑑𝑥𝑗
On a les propriétés suivantes
Soit 𝑋 ∈ 𝔛(𝑀) et 𝑌 ∈ 𝔛(𝑀).
𝑔(𝛼𝑋 + 𝑌, 𝑍) = 𝛼𝑔(𝑋, 𝑍) + 𝑔(𝑌, 𝑍) Est une application bilinéaire.

72
𝑔(𝑋, 𝑌) = 𝑔(𝑌, 𝑋) Symétrique.
𝑔(𝑋, 𝑌) = 0 Pour 𝑌 ∈ 𝔛(𝑀) alors 𝑋 = 0
On veut alors chercher alors les valeurs propres (fonctions locales) de la métrique
On définit la fonction locale de la métrique par 𝑔𝑖𝑗 = 𝑔(𝜕𝑖, 𝜕𝑗) = ⟨𝜕𝑖, 𝜕𝑗⟩
Soit la forme locale de deux champs 𝑋 = 𝑋𝑖𝜕𝑖 et 𝑌 = 𝑌𝑖𝜕𝑖
𝑔(𝑋, 𝑌) = 𝑔(𝑋𝑖𝜕𝑖, 𝑌𝑖𝜕𝑖)
𝑔(𝑋, 𝑌) = 𝑔(𝜕𝑖, 𝜕𝑖)𝑋𝑖𝑌𝑖
𝑔(𝑋, 𝑌) = 𝑔𝑖𝑗𝑋𝑖𝑌𝑖
Ces fonctions locales de la métrique vérifiant 𝑔𝑖𝑗𝑔𝑖𝑙 = 𝛿𝑗
𝑙 = {1 𝑙 = 𝑗0 𝑙 ≠ 𝑗
Proposition1
La métrique à partir d’un élément de longueur 𝑑𝑠, généralement on écrire
𝑑𝑠2 = 𝑔𝑖𝑗𝑑𝑥𝑖𝑑𝑥𝑗
Preuve
On sait à partir du théorème de Pythagore
𝑑𝑠2 = 𝑑𝑥2 + 𝑑𝑦2
Généralement pour 𝑛 dimension
𝑑𝑠2 =∑𝑑𝑥𝑖2
𝑛
𝑖=1
𝑑𝑠2 =∑𝛿𝑖𝑗𝑑𝑥𝑖𝑑𝑥𝑗
𝑛
𝑖=1
C’est-à-dire la métrique d’un espace euclidien de dimension 𝑛 est
𝛿𝑖𝑗 = (1 0 ⋱0 ⋱ 0⋱ 0 1
) = {1 𝑖 = 𝑗0 𝑖 ≠ 𝑗
Mais pour un espace non euclidien c’est-à-dire déformé ou courbé on aura
𝑔𝑖𝑗 ≠ 𝛿𝑖𝑗
Généralement
𝑑𝑠2 =∑𝑔𝑖𝑗𝑑𝑥𝑖𝑑𝑥𝑗
𝑛
𝑖=1
Avec 𝑔𝑖𝑗 = 𝑔(𝑒𝑖, 𝑒𝑗)
Exemple
Soit 𝑓(𝑥, 𝑦) = (𝑓1(𝑥, 𝑦), 𝑓2(𝑥, 𝑦))
La métrique de cette courbe dans une variété M est

73
𝑔𝑖𝑗 =
(
𝜕𝑓
𝜕𝑥
𝜕𝑓
𝜕𝑥
𝜕𝑓
𝜕𝑥
𝜕𝑓
𝜕𝑦𝜕𝑓
𝜕𝑦
𝜕𝑓
𝜕𝑥
𝜕𝑓
𝜕𝑦
𝜕𝑓
𝜕𝑦)
Proposition2
On dit qu’une variété est riemannienne si elle est définie positive : det 𝑔 > 1
On dit qu’une variété est pseudo-riemannienne si elle est définie négative :
det 𝑔 > 1.
Métrique de Minkowski
Dans la mécanique newtonienne le temps n’a aucune place dans les formules qui
représente les coordonnées d’un objet, on a justement les coordonnées spatiales
(𝑥, 𝑦, 𝑧), et dans la géométrie euclidienne qui réagit les lois mathématiques de
cette mécanique on peut définir le produit scalaire entre deux vecteurs :
𝑢 = (𝑥 𝑥 𝑧) ; 𝑣 = (𝑥′𝑦′
𝑧′
)
𝑢. 𝑣 = (𝑥 𝑦 𝑧) (𝑥′𝑦′
𝑧′
) = 𝑥𝑥′ + 𝑦𝑦′ + 𝑧𝑧′
Tout les calculs et les produits scalaire dans cette géométrie reposent sur la
métrique euclidienne ou plutôt l’identité d’un espace :
𝐼 = 𝑖𝑑(ℝ3) = (1 0 00 1 00 0 1
)
Pour trouver la métrique qui décrit l’espace-temps plat (non courber) il faut
revenir aux équations physiques et trouver ou on aura au même temps les
coordonnées spatiales et le temps de même puissance. Et puis on cherche la
métrique qui compose l’espace-temps.
On sait la plupart des équations physiques s’écrivent comme ça
cos(𝜔𝑡 − 𝑘𝑥) , sin(𝜔𝑡 − 𝑘𝑥)
𝑒𝑖(𝜔𝑡−𝑘𝑥)
Soient les deux vecteurs
𝑢 = (𝜔 𝑘) ; 𝑣 = (𝑡𝑥)

74
Il faut faire le produit scalaire entre les deux vecteurs pour trouver 𝜔𝑡 − 𝑘𝑥
Le produit scalaire dans l’espace euclidien s’écrit
𝑢. 𝑣 = (𝜔 𝑘) (𝑡𝑥) = (𝜔 𝑘) (
1 00 1
) (𝑡𝑥) = 𝜔𝑡 + 𝑘𝑥
Ce résultat est incompatible avec 𝜔𝑡 − 𝑘𝑥.
Alors il faut changer la métrique d’espace euclidien on choisit une nouvelle
métrique (1 00 −1
) dans un espace non euclidien tel que
𝑢. 𝑣 = (𝜔 𝑘) (𝑡𝑥) = (𝜔 𝑘) (
1 00 −1
) (𝑡𝑥) = 𝜔𝑡 − 𝑘𝑥
(1 00 −1
) Appelée la métrique de Minkowski, s’écrit généralement dans l’espace-
temps a 4 dimension :
𝜂 = (
1 0 0 00 −1 0 000
00
−1 00 −1
)
4.3 Connexion
La connexion 𝛻 sur une variété (𝑀, 𝑔) est une application qui relier deux champs
de vecteurs 𝑋 et 𝑌 de deux espaces tangent voisins, parfois on dit que la
connexion de 𝑌 par 𝑋 (noté 𝜵𝑿𝒀) est une dérivée de champ 𝑌 par rapport au
champ 𝑋, et non pas d’une fonction par rapport à un coordonné,
mathématiquement on écrit
𝛻: 𝔛(𝑀)⨂𝔛(𝑀) → 𝔛(𝑀)
(𝑋, 𝑌) → 𝛻𝑋𝑌
Tel que 𝑋 ∈ 𝔛(𝑀) et 𝑌 ∈ 𝔛(𝑀).
La connexion détermine la variation d’un champ par rapport à un autre c’est
aussi un opérateur spatial dans la géométrie Riemannienne.
La connexion 𝛻 agissant sur une paire bien définie de champs vectoriels (𝑋, 𝑌) sur
la variété (𝑀, 𝑔). On la nomme également une dérivation covariante sur M. On dit alors que 𝛻𝑋𝑌 est la dérivée covariante du champ vectoriel 𝑌 le long du vecteur 𝑋 . Le terme connexion vient de ce que 𝛻 “ connecte“ des espaces
vectoriels tangents infiniment voisins.

75
Soit 𝑓 ∈ 𝐶∞(𝑀) on alors
𝛻(𝑓𝑋1+𝑋2)𝑌 = 𝑓𝛻𝑋1𝑌 + 𝛻𝑋2𝑌
𝛻𝑋(𝑓𝑌) = 𝑋(𝑓)𝑌 + 𝑓𝛻𝑋𝑌
𝛻𝑋(𝑌1 + 𝑌2) = 𝛻𝑋𝑌1 + 𝛻𝑋𝑌2
Soit 𝑍 ∈ 𝔛(𝑀)
𝑍(𝑔(𝑋, 𝑌)) = 𝑔(𝛻𝑍𝑋, 𝑌) + 𝑔(𝑋, 𝛻𝑍𝑌)
Remarque1.
La connexion 𝛻𝑋 dérive par rapport à un champ de vecteur 𝑋, par contre la
dérivée standard 𝜕𝑖 =𝜕
𝜕𝑥𝑖 est une dérivée par rapport à un vecteur 𝑥𝑖 (coordonné
locale) et non pas champ de vecteur.
Remarque2.
Soit X et Y deux champs de vecteurs sur une variété M, si ∇𝑋𝑌 = 0, on dit que les
deux champs X et Y sont courbement parallèle.
Cas semblable soit y=2 une fonction sur ℝ2 on a 𝜕𝑦
𝜕𝑥= 0 car les deux courbes x et
y=2 sont parallèle.
Exercice.
Montrer que 𝛻𝑋𝑌 est une dérivation de Y par rapport à X.
Théorème de Levi civita (1917)
Soit une variété riemannienne (𝑀, 𝑔), il existe une unique connexion sans torsion,
dans ce cas on a une compatibilité entre la métrique et la connexion comme suit
𝑔(𝛻𝑋𝑌, 𝑍) =1
2(𝑋(𝑔(𝑌, 𝑍)) + 𝑌(𝑔(𝑋, 𝑍)) − 𝑍(𝑔(𝑋, 𝑌)) + 𝑔([𝑋, 𝑌], 𝑍) + 𝑔([𝑍, 𝑋], 𝑌)
+ 𝑔([𝑍, 𝑌], 𝑋))
Démonstration

76
On a
𝑋(𝑔(𝑌, 𝑍)) = 𝑔(𝛻𝑋𝑌, 𝑍) + 𝑔(𝑌, 𝛻𝑋𝑍)
𝑌(𝑔(𝑋, 𝑍)) = 𝑔(𝛻𝑌𝑋, 𝑍) + 𝑔(𝑋, 𝛻𝑌𝑍)
𝑍(𝑔(𝑋, 𝑌)) = 𝑔(𝛻𝑍𝑋, 𝑌) + 𝑔(𝑋, 𝛻𝑍𝑌)
On calcule d’abord 𝑋(𝑔(𝑌, 𝑍)) + 𝑌(𝑔(𝑋, 𝑍)) − 𝑍(𝑔(𝑋, 𝑌)) et on trouve exactement
𝑔(𝛻𝑋𝑌, 𝑍)
4.4 La courbure
4.4.1 Symboles de Christoffel
Soit 𝑋 =𝜕
𝜕𝑥𝑖= 𝜕𝑖,on appelle des fonctions locales Γ𝑖𝑗
𝑘 définissent par
𝛻𝜕𝑖𝜕𝑗 = Γ𝑖𝑗𝑘𝜕𝑘
Des symboles de Christoffel.
Les symboles de Christoffel Γ𝑖𝑗𝑘 sont des valeurs propres de 𝛻𝜕𝑖 dans par
l’opérateur 𝜕𝑗. Puisque Γ𝑖𝑗𝑘 décrivent la courbure d’une variété alors il faut écrire
ces symboles en fonction de métrique définit sur une variété.
On suppose que Γ𝑖𝑗𝑘 = Γ𝑗𝑖
𝑘 (ce cas s’appelle sans-torsion)
On a
Γ𝑖𝑗𝑙 = Γ𝑖𝑗𝑘𝑔𝑘𝑙 = Γ𝑖𝑗
𝑘𝑔(𝜕𝑘, 𝜕𝑙) = 𝑔(Γ𝑖𝑗𝑘𝜕𝑘, 𝜕𝑙) = 𝑔(𝛻𝜕𝑖𝜕𝑗 , 𝜕𝑙)
D’autre part on a Γ𝑖𝑗𝑘 sont des fonctions, ce qui nous permet d’appliquer la
première propriété de la métrique
Γ𝑖𝑗𝑘𝑔(𝜕𝑘 , 𝜕𝑙) = 𝑔(Γ𝑖𝑗
𝑘𝜕𝑘, 𝜕𝑙)
La forme locale du théorème de Levi civita
𝑔(𝛻𝜕𝑖𝜕𝑗 , 𝜕𝑙) =1
2(𝜕𝑖(𝑔(𝜕𝑗, 𝜕𝑙)) + 𝜕𝑗(𝑔(𝜕𝑖, 𝜕𝑙)) − 𝜕𝑙 (𝑔(𝜕𝑖, 𝜕𝑗)) + 𝑔([𝜕𝑖, 𝜕𝑗], 𝜕𝑙)
+ 𝑔([𝜕𝑙, 𝜕𝑖], 𝜕𝑗) + 𝑔([𝜕𝑙, 𝜕𝑗], 𝜕𝑖))
=1
2(𝜕𝑖(𝑔(𝜕𝑗 , 𝜕𝑙)) + 𝜕𝑗(𝑔(𝜕𝑖, 𝜕𝑙)) − 𝜕𝑙 (𝑔(𝜕𝑖, 𝜕𝑗)))
Γ𝑖𝑗𝑘𝑔𝑘𝑙 =
1
2(𝜕𝑖(𝑔(𝜕𝑗, 𝜕𝑙)) + 𝜕𝑗(𝑔(𝜕𝑖, 𝜕𝑙)) − 𝜕𝑙 (𝑔(𝜕𝑖, 𝜕𝑗)))

77
Γ𝑖𝑗𝑘 =
1
2𝑔𝑘𝑙 (𝜕𝑖(𝑔(𝜕𝑗, 𝜕𝑙)) + 𝜕𝑗(𝑔(𝜕𝑖, 𝜕𝑙)) − 𝜕𝑙 (𝑔(𝜕𝑖, 𝜕𝑗)))
On utilise la propriété 𝑔(𝜕𝑖, 𝜕𝑗) = 𝑔𝑖𝑗 on trouve la forme explicite de symbole de
Christoffel en fonction de la métrique
Γ𝑖𝑗𝑘 =
1
2𝑔𝑘𝑙(𝜕𝑖𝑔𝑗𝑙 + 𝜕𝑗𝑔𝑖𝑙 − 𝜕𝑙𝑔𝑖𝑗)
4.4.2 Le tenseur de torsion
Le tenseur de torsion 𝑇 est un opérateur qui détermine la nature symétrique
d’une connexion, on dit aussi que le tenseur de torsion est champ de vecteur, qui
est définit par
𝑇(𝑋, 𝑌) = 𝛻𝑋𝑌 − 𝛻𝑌𝑋 − [𝑋, 𝑌]
Tel que 𝑋 ∈ 𝔛(𝑀) et 𝑌 ∈ 𝔛(𝑀).
On dit que la connexion 𝛻 est symétrique si le tenseur de torsion est nul 𝑻 = 𝟎.
C’est-à-dire
𝛻𝑋𝑌 − 𝛻𝑌𝑋 = [𝑋, 𝑌]
Si on applique de cette fois c’est le tenseur de torsion sur des fonctions locales des
champs utilises
Pour 𝑋 = 𝜕𝑖 et 𝑌 = 𝜕𝑗
𝑇(𝜕𝑖 , 𝜕𝑗) = 𝛻𝜕𝑖𝜕𝑗 − 𝛻𝜕𝑗𝜕𝑖 − [𝜕𝑖, 𝜕𝑗]
On sait que 𝜕𝑖𝜕𝑗 = 𝜕𝑗𝜕𝑖 ⇒ [𝜕𝑖, 𝜕𝑗] = 0
𝑇(𝜕𝑖 , 𝜕𝑗) = 𝛻𝜕𝑖𝜕𝑗 − 𝛻𝜕𝑗𝜕𝑖
= (Γ𝑖𝑗𝑘 − Γ𝑗𝑖
𝑘)𝜕𝑘
On veut chercher les valeurs propres de tenseur de torsion qui est définit comme
Un champ de vecteur (𝑇 = 𝑇𝑘𝜕𝑘), ces valeurs s’écrivent alors comme
𝑇𝑖𝑗𝑘 = Γ𝑖𝑗
𝑘 − Γ𝑗𝑖𝑘
❖ Les symétries et identités
𝑇(𝑋, 𝑌) = −𝑇(𝑌, 𝑋)

78
𝑇(𝑋 + 𝑌, 𝑍) = 𝑇(𝑋, 𝑌) + 𝑇(𝑋, 𝑍)
𝑇(𝑓𝑋, 𝑌) = 𝑓𝑇(𝑋, 𝑌)
Démonstration
On a 𝑇(𝑋, 𝑌) = 𝛻𝑋𝑌 − 𝛻𝑌𝑋 − [𝑋, 𝑌] ,on utilise les propriétés de la connexion on peut
démonter les symétries précèdent
𝑇(𝑌, 𝑋) = 𝛻𝑌𝑋 − 𝛻𝑋𝑌 − [𝑌, 𝑋]
𝑇(𝑋, 𝑌) + 𝑇(𝑌, 𝑋) = [𝑌, 𝑋] + [𝑋, 𝑌] = 0
𝑇(𝑋, 𝑌) = −𝑇(𝑌, 𝑋)
𝑇(𝑋 + 𝑌, 𝑍) = 𝛻𝑋+𝑌𝑍 − 𝛻𝑍(𝑋 + 𝑌) − [𝑋 + 𝑌, 𝑍]
= 𝛻𝑋𝑍 + 𝛻𝑌𝑍 − 𝛻𝑍𝑋 − 𝛻𝑍𝑌 − [𝑋, 𝑍] − [𝑌, 𝑍]
= (𝛻𝑋𝑍 − 𝛻𝑍𝑋 − [𝑋, 𝑍]) + (𝛻𝑌𝑍 − 𝛻𝑍𝑌 − [𝑌, 𝑍])
= (𝛻𝑋𝑍 − 𝛻𝑍𝑋 − [𝑋, 𝑍]) + (𝛻𝑌𝑍 − 𝛻𝑍𝑌 − [𝑌, 𝑍])
𝑇(𝑋 + 𝑌, 𝑍) = 𝑇(𝑋, 𝑍) + 𝑇(𝑋, 𝑌)
𝑇(𝑓𝑋, 𝑌) = 𝛻𝑓𝑋𝑌 − 𝛻𝑌𝑓𝑋 − [𝑓𝑋, 𝑌]
On a
𝛻𝑓𝑋𝑌 = 𝑓𝛻𝑋𝑌
𝛻𝑌𝑓𝑋 = 𝑌(𝑓)𝑋 + 𝑓𝛻𝑌𝑋
[𝑓𝑋, 𝑌] = 𝑓[𝑋, 𝑌] − 𝑌(𝑓)𝑋 𝑣𝑜𝑖𝑟 𝑐ℎ𝑎𝑝𝑖𝑡𝑟𝑒 3
𝑇(𝑓𝑋, 𝑌) = 𝑓𝛻𝑋𝑌 − 𝑌(𝑓)𝑋 − 𝑓𝛻𝑌𝑋 − 𝑓[𝑋, 𝑌] + 𝑌(𝑓)𝑋
𝑇(𝑓𝑋, 𝑌) = 𝑓(𝛻𝑋𝑌 − 𝛻𝑌𝑋 − [𝑋, 𝑌]) = 𝑓𝑇(𝑋, 𝑌)
4.4.3 Le tenseur de Riemann
Soient 𝑋 ∈ 𝔛(𝑀) et 𝑌 ∈ 𝔛(𝑀) deux champs de vecteurs
On définit le tenseur de courbure de Riemann par

79
𝑅(𝑋, 𝑌) = ∇𝑋∇𝑌 − ∇𝑌∇𝑋 − ∇[𝑋,𝑌]
Autre forme
𝑅(𝑋, 𝑌) = [∇𝑋 , ∇𝑌] − ∇[𝑋,𝑌]
On applique ce tenseur sur un champ 𝑍 ∈ 𝔛(𝑀)
𝑅(𝑋, 𝑌)𝑍 = ∇𝑋∇𝑌𝑍 − ∇𝑌∇𝑋𝑍 − ∇[𝑋,𝑌]𝑍
On cherche d’abord les fonctions locales 𝑅𝑖𝑗𝑘𝑙 du tenseur de Riemann se sont aussi
les valeurs propres de ce tenseur, on les trouve par cette relation
𝑅(𝑋 = 𝜕𝑖 , 𝑌 = 𝜕𝑗)𝜕𝑘 = 𝑅𝑖𝑗𝑘𝑙 𝜕𝑙
On a d’après l’équation de tenseur 𝑅(𝑋, 𝑌)
𝑅(𝜕𝑖 , 𝜕𝑗)𝜕𝑘 = ∇𝜕𝑖∇𝜕𝑗𝜕𝑘 − ∇𝜕𝑗∇𝜕𝑖𝜕𝑘 − ∇[𝜕𝑖,𝜕𝑗]𝜕𝑘⏟ =0
𝑅(𝜕𝑖 , 𝜕𝑗)𝜕𝑘 = ∇𝜕𝑖(Γ𝑗𝑘𝑟 𝜕𝑟) − ∇𝜕𝑗(Γ𝑖𝑘
𝑡 𝜕𝑡)
𝑅(𝜕𝑖 , 𝜕𝑗)𝜕𝑘 = ∇𝜕𝑖(Γ𝑗𝑘𝑟 𝜕𝑟) − ∇𝜕𝑗(Γ𝑖𝑘
𝑡 𝜕𝑡)
𝑅(𝜕𝑖 , 𝜕𝑗)𝜕𝑘 = (𝜕𝑖Γ𝑗𝑘𝑟 )𝜕𝑟 + Γ𝑗𝑘
𝑟 ∇𝜕𝑖𝜕𝑟 − (𝜕𝑗Γ𝑖𝑘𝑡 )𝜕𝑡 − Γ𝑖𝑘
𝑡 ∇𝜕𝑗𝜕𝑡
𝑅(𝜕𝑖 , 𝜕𝑗)𝜕𝑘 = (𝜕𝑖Γ𝑗𝑘𝑟 )𝜕𝑟 + Γ𝑗𝑘
𝑟 Γ𝑖𝑟𝑠 𝜕𝑠 − (𝜕𝑗Γ𝑖𝑘
𝑡 )𝜕𝑡 − Γ𝑖𝑘𝑡 Γ𝑗𝑡
𝑒𝜕𝑒
𝑅(𝜕𝑖, 𝜕𝑗)𝜕𝑘 = (𝜕𝑖Γ𝑗𝑘𝑙 )𝜕𝑙 + Γ𝑗𝑘
𝑟 Γ𝑖𝑟𝑙 𝜕𝑙 − (𝜕𝑗Γ𝑖𝑘
𝑙 )𝜕𝑙 − Γ𝑖𝑘𝑡 Γ𝑗𝑡
𝑙 𝜕𝑙
𝑅(𝜕𝑖, 𝜕𝑗)𝜕𝑘 = (𝜕𝑖Γ𝑗𝑘𝑙 + Γ𝑗𝑘
𝑟 Γ𝑖𝑟𝑙 − 𝜕𝑗Γ𝑖𝑘
𝑙 − Γ𝑖𝑘𝑡 Γ𝑗𝑡
𝑙 )𝜕𝑙
Alors les fonctions locales du tenseur de Riemann sont
𝑅𝑖𝑗𝑘𝑙 = 𝜕𝑖Γ𝑗𝑘
𝑙 + Γ𝑗𝑘𝑟 Γ𝑖𝑟
𝑙 − 𝜕𝑗Γ𝑖𝑘𝑙 − Γ𝑖𝑘
𝑡 Γ𝑗𝑡𝑙
Pour retenir
𝑅𝑎𝑏𝑐𝑙 = (𝜕𝑎Γ𝑏𝑐
𝑙 − 𝜕𝑏Γ𝑎𝑐𝑙 ) − (Γ𝑎𝑐
𝑟 Γ𝑏𝑟𝑙 − Γ𝑏𝑐
𝑟 Γ𝑎𝑟𝑙 )
𝑅𝑎𝑏𝑐𝑙 ≅ (𝑎𝑏 − 𝑏𝑎)𝒄 − (𝑎𝒄𝑏 − 𝑏𝒄𝑎)
❖ Les symétries et identités
𝑅(𝑋, 𝑌) = −𝑅(𝑌, 𝑋)
𝑅(𝑋, 𝑌)𝑍 + 𝑅(𝑍, 𝑋)𝑌 + 𝑅(𝑌, 𝑍)𝑋 = 0
⟨𝑅(𝑋, 𝑌)𝑉,𝑊⟩ = −⟨𝑅(𝑋, 𝑌)𝑊, 𝑉⟩

80
⟨𝑅(𝑋, 𝑌)𝑉,𝑊⟩ = −⟨𝑅(𝑉,𝑊)𝑋, 𝑌⟩
Preuve.
On veut démonter la relation antisymétrique de tenseur de Riemann
𝑅(𝑋, 𝑌) = [𝛻𝑋 , 𝛻𝑌] − 𝛻[𝑋,𝑌]
= [𝛻𝑌, 𝛻𝑋] − 𝛻[𝑌,𝑋]
= −[𝛻𝑋 , 𝛻𝑌] + 𝛻[𝑋,𝑌]
= −𝑅(𝑌, 𝑋)
Pour monter la deuxième identité
𝑅(𝑋, 𝑌 )𝑍 + 𝑅(𝑌, 𝑍)𝑋 + 𝑅(𝑍, 𝑋)𝑌 = 𝛻𝑋𝛻𝑌 𝑍 − 𝛻𝑌 𝛻𝑋𝑍 − 𝛻[𝑋,𝑌 ]𝑍 + 𝛻𝑌 𝛻𝑍𝑋 − 𝛻𝑍𝛻𝑌 𝑋 − 𝛻[𝑌,𝑍 ]𝑋
+𝛻𝑍𝛻𝑋𝑌 − 𝛻𝑋𝛻𝑍𝑌 − 𝛻[𝑍,𝑋 ]𝑌
= 𝛻𝑋(𝛻𝑌 𝑍 − 𝛻𝑍 𝑌) + 𝛻𝑌 (𝛻𝑍𝑋 − 𝛻𝑋𝑍) + 𝛻𝑍 (𝛻𝑋𝑌 − 𝛻𝑌𝑋)
− 𝛻[𝑋,𝑌 ]𝑍 − 𝛻[𝑌,𝑍 ]𝑋 − 𝛻[𝑍,𝑋 ]𝑌
Et on utilise la propriété de sans-torsion : 𝛻𝑋 𝑌 − 𝛻𝑌 𝑋 = [𝑋, 𝑌], on trouve
= ( 𝛻[𝑌,𝑍]𝑋 − 𝛻𝑋[𝑌, 𝑍]) + (𝛻[𝑍,𝑋]𝑌 − 𝛻𝑌 [𝑍, 𝑋]) + (𝛻[𝑋,𝑌 ]𝑍 − 𝛻𝑍[𝑋, 𝑌 ])
De même la propriété de sans-torsion nous permet d’écrire
= [𝑋, [𝑌, 𝑍]] + [𝑌, [𝑍, 𝑋]] + [𝑍, [𝑋, 𝑌 ]]
On trouve finalement l’identité de Bianchi [𝑋, [𝑌, 𝑍]] + [𝑌, [𝑍, 𝑋]] + [𝑍, [𝑋, 𝑌 ]] = 0
Alors 𝑅(𝑋, 𝑌 )𝑍 + 𝑅(𝑌, 𝑍)𝑋 + 𝑅(𝑍, 𝑋)𝑌 = 0
La troisième identité du tenseur de Riemann concerne la permutation entre deux
couples de champs. Pour la montrer on va utiliser
⟨𝑅(𝑋, 𝑌 )𝑍,𝑊⟩ = −⟨𝑅(𝑌, 𝑍)𝑋,𝑊⟩ − ⟨𝑅(𝑍, 𝑋)𝑌,𝑊⟩ = ⟨ 𝑅(𝑌, 𝑍)𝑊, 𝑋 ⟩ + ⟨𝑅(𝑍, 𝑋)𝑊, 𝑌⟩
Puis on calcule la différence (indication !)
⟨𝑅(𝑋, 𝑌 )𝑍,𝑊⟩ − ⟨ 𝑅(𝑍,𝑊)𝑋, 𝑌⟩ = ⟨ 𝑅(𝑌, 𝑍)𝑊, 𝑋 ⟩ + ⟨𝑅(𝑍, 𝑋)𝑊, 𝑌⟩ − ⟨𝑅(𝑍,𝑊)𝑋, 𝑌⟩
⟨𝑅(𝑋, 𝑌 )𝑍,𝑊⟩ − ⟨ 𝑅(𝑍,𝑊)𝑋, 𝑌⟩ = ⟨ 𝑅(𝑌, 𝑍)𝑊, 𝑋 ⟩ + ⟨𝑅(𝑍, 𝑋)𝑊, 𝑌⟩ + ⟨𝑅(𝑊, 𝑍)𝑋, 𝑌⟩
A partir de 𝑅(𝑍, 𝑋)𝑊 + 𝑅(𝑊, 𝑍)𝑋 + 𝑅(𝑋,𝑊)𝑍 = 0
On peut former ⟨𝑅(𝑍, 𝑋)𝑊, 𝑌⟩ + ⟨𝑅(𝑊, 𝑍)𝑋, 𝑌⟩ + ⟨𝑅(𝑋,𝑊)𝑍, 𝑌⟩ = 0
Alors

81
⟨𝑅(𝑋, 𝑌 )𝑍,𝑊⟩ − ⟨ 𝑅(𝑍,𝑊)𝑋, 𝑌⟩ = ⟨𝑅(𝑌, 𝑍)𝑊, 𝑋⟩ − ⟨𝑅(𝑋,𝑊)𝑍, 𝑌⟩ = ⟨𝑅(𝑌, 𝑍)𝑊, 𝑋⟩ − ⟨𝑅(𝑊, 𝑋)𝑌, 𝑍⟩
Compléter les calculs
4.4.4 Le tenseur de Ricci
On définit le tenseur de courbure de Ricci par
𝑅𝑖𝑗 = 𝑅𝑖𝑙𝑗𝑙
La courbure scalaire 𝑅 = 𝑔𝑖𝑗𝑅𝑖𝑗
4.4.5 Le tenseur de d’Einstein
𝐺𝑖𝑗 = 𝑅𝑖𝑗 −1
2𝑔𝑖𝑗𝑅
Preuve. (Voir le cours : Relativité générale de Éric Gourgoulhon, le site
http://luth.obspm.fr/~luthier/gourgoulhon/fr/master/relat.html)
4.5 Géodésiques
4.5.1 Transport parallèle
Un champ de vecteurs 𝑌 tangent le long d’une hypersurface (variété), pour que ce
champ soit parallèle à autre champ de la 𝑋 il faut
∇𝑋𝑌 = 0
4.5.2 Définition
Une géodésique sur une variété lisse (𝑀, 𝑔) muni d’une connexion ∇ et définie par
une courbe 𝑐(𝑡) qui représente le chemin le plus courte sur la variété (𝑀, 𝑔), il
faut que la dérivée de 𝑐(𝑡) par une paramétrisation 𝑡 soit parallèle au plan
tangent à (𝑀, 𝑔).
On dit que 𝑐 est une géodésique si et seulement si
∇𝑐̇�̇� = 0
Avec �̇� =𝑑𝑐
𝑑𝑡
Autrement dit 𝑐 est une géodésique si et seulement si le champ de vecteurs des
vitesses �̇� est parallèle au plant tangent le long de la courbe 𝑐.

82
Une géodésique sur une variété est le chemin le plus courte possible sur cette
variété.
Par exemple pour ℝ𝑛 le chemin le plus courte est un droit, on dit dans ce cas que
la distance courte entre deux points est un droit.
4.5.3 Proposition.
La distance géodésique détermine sur (𝑀, 𝑔) une structure d’espace métrique
compatible avec sa topologie.
4.5.4 Courbe paramétré sur une variété (𝑴,𝒈)
Une courbe 𝑐 est dite paramétré sur une variété M si cette courbe prend des
valeurs réels vers la variété (𝑀, 𝑔) autrement dit 𝑐:ℝ → 𝑀.
L’expression de 𝑐 dans les coordonnées locales
�̃� = 𝜑𝑜𝑐:ℝ → ℝ𝑚
Avec 𝜑:𝑈 → ℝ𝑛
�̃� = (𝑥1(𝑡), … , 𝑥𝑚(𝑡))
Soit �̇�(𝑡) =𝜕𝑐
𝜕𝑡 la vitesse de changement de la direction de la courbe 𝛾 sur la
variété, cette vitesse devrait être tangente à la courbe sur un ouvert autour d’un
point 𝑥0, par définition 𝑥0 ≔ 𝑐(0). En effet les espaces tangents sont les
ensembles des vecteurs tangents de courbes {𝑐} tel que
𝑇𝑥0 = {�̇�(0) ≠ 0|𝑐: 𝐼 → 𝑀, 𝑐(0) = 𝑥0}
Considérons par suite une fonction différentiable 𝑓:ℝ → 𝑀 ceci traduit
𝑓𝑜𝑐:ℝ → ℝ
Une courbe est une solution des équations du champ vectoriel, si pour chaque
point, la vitesse de la courbe est égale au champ vectoriel en ce point ; on dit que
la courbe est un chemin intégral du champ vectoriel.
4.5.5 Equation géodésique
On a déjà posé une condition pour la géodésique qui s’écrit
∇𝑐̇�̇� = 0
Alors à partir de cette équation on cherche les fonctions locales
�̇� = �̇�𝑖𝜕𝑖
∇𝑐̇�̇� = ∇�̇�𝛼𝜕𝛼�̇�𝛽𝜕𝛽 = �̇�
𝛼∇𝜕𝛼�̇�𝛽𝜕𝛽

83
= �̇�𝛼(𝜕𝛼(�̇�𝛽)𝜕𝛽 + �̇�
𝛽∇𝜕𝛼𝜕𝛽)
D’autre part on a 𝜕𝛼�̇�𝛽 =
𝜕
𝜕𝑥𝛼�̇�𝛽 =
𝜕𝑡
𝜕𝑥𝛼𝜕
𝜕𝑡�̇�𝛽 =
�̈�𝛽
�̇�𝛼
∇𝑐̇�̇� = �̇�𝛼 (�̈�𝛽
�̇�𝛼𝜕𝛽 + �̇�
𝛽Γ𝛼𝛽𝑙 𝜕𝑙)
= �̈�𝛽𝜕𝛽 + �̇�𝛼�̇�𝛽Γ𝛼𝛽
𝑙 𝜕𝑙 = 0
Alors l’équation géodésique s’écrit
�̈�𝑙(𝑡) + �̇�𝛼(𝑡)�̇�𝛽(𝑡)Γ𝛼𝛽𝑙 = 0
Cette équation nous permet de déterminer pour chaque variété Riemannienne la
structure de chemin le plus court.
Exemple.
Pour un espace plat sans courbure sans déformation on a généralement Γ𝛼𝛽𝑙 = 0,
alors l’équation géodésique qui caractérise cette espace est �̈�𝑙(𝑡) = 0, cette
équation peut se traduire par intégration de façon suivant
𝑥𝑙(𝑡) = 𝑎𝑡 + 𝑏
Cette équation caractérise des lignes droites c’est-à-dire que pour un espace plat
le chemin le plus court est une ligne droite.
4.6 Dérivation covariante d’un champ de vecteurs
Considérons un champ de bases 𝜕𝛼 sur l’espace tangente de la variété (𝑀, 𝑔) en
chaque point de la variété on peut donc construire cette basse. Le champ 𝜕𝛼 est
également appelé tétrade. Par définition de la connexion, pour toute paire (𝛼, 𝛽) ∇𝜕𝛼𝜕𝛽 = Γ𝛼𝛽
𝑙 𝜕𝑙
Et
Soit deux champs de vecteurs 𝑋 ∈ 𝔛(𝑀) et 𝑌 ∈ 𝔛(𝑀)
∇𝑋𝑌 = ∇𝑋𝛼𝜕𝛼(𝑌𝛽𝜕𝛽)
∇𝑋𝑌 = 𝑋𝛼∇𝜕𝛼(𝑌
𝛽𝜕𝛽)
∇𝑋𝑌 = 𝑋𝛼𝜕𝛼(𝑌
𝛽)𝜕𝛽 + 𝑋𝛼𝑌𝛽∇𝜕𝛼(𝜕𝛽)
∇𝑋𝑌 = 𝑋𝛼𝜕𝛼(𝑌
𝛽)𝜕𝛽 + 𝑋𝛼𝑌𝛽Γ𝛼𝛽
𝑙 𝜕𝑙
∇𝑋𝑌 = 𝑋𝛼(𝜕𝛼(𝑌
𝛽)𝜕𝛽 + 𝑌𝛽Γ𝛼𝛽
𝑙 𝜕𝑙)
Avec {𝜕𝛼} est la base de l’espace tangent sur la variété.

84
Exercices corrigés
Exercice1.
La représentation paramétrique du tore est donnée par
𝑥1(𝑢, 𝑣) = (𝑅 + 𝑟 cos 𝑢) cos 𝑣
𝑥2(𝑢, 𝑣) = (𝑅 + 𝑟 cos 𝑢) sin 𝑣
𝑥3(𝑢, 𝑣) = 𝑟 sin 𝑢
Avec 𝑟 < 𝑅 , (𝑢, 𝑣) ∈ [0,2𝜋].
On définit la métrique généralement
𝑔𝑖𝑗(𝑢, 𝑣) = 𝑡 𝑖(𝑢, 𝑣). 𝑡 𝑗(𝑢, 𝑣)
Avec
𝑡 1(𝑢, 𝑣) =
(
𝜕𝑥1𝜕𝑢𝜕𝑥2𝜕𝑢𝜕𝑥3𝜕𝑢 )
; 𝑡 2(𝑢, 𝑣) =
(
𝜕𝑥1𝜕𝑣𝜕𝑥2𝜕𝑣𝜕𝑥3𝜕𝑣 )
L’élément de surface du tore est donné par
𝑑𝑠 = √|det 𝑔|. 𝑑𝑢. 𝑑𝑣
Calculer la surface totale du tore.
Réponse.
𝑔𝑖𝑗 = 𝑡 𝑖. 𝑡 𝑗 = (𝑡 1. 𝑡 1 𝑡 2. 𝑡 1𝑡 1. 𝑡 2 𝑡 2. 𝑡 2
)
=
(
∑
𝜕𝑥𝑖𝜕𝑢.𝜕𝑥𝑖𝜕𝑢
3
𝑖=1
∑𝜕𝑥𝑖𝜕𝑣.𝜕𝑥𝑖𝜕𝑢
3
𝑖=1
∑𝜕𝑥𝑖𝜕𝑢.𝜕𝑥𝑖𝜕𝑣
3
𝑖=1
∑𝜕𝑥𝑖𝜕𝑣.𝜕𝑥𝑖𝜕𝑣
3
𝑖=1 )

85
On a
𝜕𝑥1𝜕𝑢
= −𝑟 cos 𝑣 sin 𝑢
𝜕𝑥2𝜕𝑢
= −𝑟 sin 𝑣 sin 𝑢
𝜕𝑥3𝜕𝑢
= 𝑟 cos 𝑢
|
|
𝜕𝑥1𝜕𝑣
= −(𝑅 + 𝑟 cos 𝑢) sin 𝑣
𝜕𝑥2𝜕𝑣
= (𝑅 + 𝑟 cos 𝑢) cos 𝑣
𝜕𝑥3𝜕𝑣
= 0
Alors
𝑔 = (𝑟2 00 (𝑅 + 𝑟 cos 𝑢)2
)
det 𝑔 = 𝑟2(𝑅 + 𝑟 cos 𝑢)2
L’élément de surface du tore s’écrit
𝑑2𝑠 = √|det 𝑔|. 𝑑𝑢. 𝑑𝑣
𝑑2𝑠 = 𝑟(𝑅 + 𝑟 cos 𝑢)𝑑𝑢. 𝑑𝑣
Alors la surface totale du tore est
∬ 𝑑2𝑠
2𝜋
0
= 𝑟(𝑅 + 𝑟 cos 𝑢)𝑑𝑢. 𝑑𝑣
𝑆𝑇 =∬𝑑2𝑠
2𝜋
0
=∬𝑟𝑅𝑑𝑢. 𝑑𝑣
2𝜋
0
+ 𝑟2∬cos 𝑢 𝑑𝑢. 𝑑𝑣
2𝜋
0
𝑆𝑇 =∬𝑑2𝑠
2𝜋
0
= 4𝜋2𝑟𝑅 + 2𝜋𝑟2 [sin 𝑢]02𝜋
⏟ =0
𝑆𝑇 = 4𝜋2𝑟𝑅
Exercice2.
Soit la sphère 𝕊2 ⊂ ℝ3 de rayon 𝑟 représenté à trois dimensions. Paramétrée par
les coordonnées sphériques (𝑟, 𝜃, 𝜑) sous forme d’une application
𝑓(𝜃, 𝜑) = (𝑟 sin 𝜃 cos𝜑 , 𝑟 sin 𝜃 sin𝜑 , 𝑟 cos 𝜃)

86
1- Déterminer la métrique de 𝕊2.
2- Monter que les seuls symboles de Christoffel non nuls sont
Γ𝜑𝜑𝜃 = −sin 𝜃 cos 𝜃
Γ𝜃𝜑𝜑= Γ𝜑𝜃
𝜑= cot 𝜃
3- Déterminer le tenseur de courbure de Riemann de 𝕊2.
4- Déterminer le tenseur de courbure de Ricci de 𝕊2.
5- Déterminer l’équation géodésique de la sphère.
Réponse.
1- Calcule de la métrique 𝑔𝑖𝑗 pour (𝑖, 𝑗) = (𝜃, 𝜑)
𝑔𝑖𝑗 = (𝑔𝜃𝜃 𝑔𝜃𝜑𝑔𝜑𝜃 𝑔𝜑𝜑
) =
(
𝜕𝑓
𝜕𝜃.𝜕𝑓
𝜕𝜃
𝜕𝑓
𝜕𝜃.𝜕𝑓
𝜕𝜑𝜕𝑓
𝜕𝜑.𝜕𝑓
𝜕𝜃
𝜕𝑓
𝜕𝜑.𝜕𝑓
𝜕𝜑)
𝜕𝑓
𝜕𝜃.𝜕𝑓
𝜕𝜃= 𝑟2(cos 𝜃 cos𝜑 , cos 𝜃 sin𝜑 , −sin𝜃) (
cos 𝜃 cos𝜑cos 𝜃 sin𝜑−sin 𝜃
)
𝜕𝑓
𝜕𝜃.𝜕𝑓
𝜕𝜃= 𝑟2(cos2 𝜃 cos2 𝜑 + cos2 𝜃 sin2 𝜑 + sin2 𝜃)
𝜕𝑓
𝜕𝜃.𝜕𝑓
𝜕𝜃= 𝑟2
De même
𝜕𝑓
𝜕𝜃.𝜕𝑓
𝜕𝜑= 𝑟2(cos 𝜃 cos𝜑 , cos 𝜃 sin𝜑 ,−sin 𝜃) (
−sin 𝜃 sin𝜑sin 𝜃 cos𝜑
0
)
𝜕𝑓
𝜕𝜃.𝜕𝑓
𝜕𝜑= 0
On trouve donc
𝑔𝑖𝑗 = (𝑔𝜃𝜃 𝑔𝜃𝜑𝑔𝜑𝜃 𝑔𝜑𝜑
) = (𝑟2 00 𝑟2 sin2 𝜃
)
2- Calcule des symboles de Christoffel :

87
Γ𝑖𝑗𝑘 =
1
2𝑔𝑘𝑙(𝜕𝑖𝑔𝑗𝑙 + 𝜕𝑗𝑔𝑖𝑙 − 𝜕𝑙𝑔𝑖𝑗)
Il faut constater que 𝑔𝜃𝜑 = 𝑔𝜑𝜃 = 0 et que 𝑔𝜃𝜃 = (𝑔𝜃𝜃)−1 et 𝑔𝜃𝜑 = 0 pour vérifier
cela il faut inverser la matrice 𝑔𝑖𝑗
On a (𝑖, 𝑗, 𝑘) = (𝜃, 𝜑) et la sommation sur 𝑙 prend aussi les valeurs 𝜃, 𝜑 (voir
chapitre 1)
Alors pour 𝑖 = 𝜑, 𝑗 = 𝜑 𝑒𝑡 𝑘 = 𝜃
Γ𝜑𝜑𝜃 =
1
2𝑔𝜃𝑙(𝜕𝜑𝑔𝜑𝑙 + 𝜕𝜑𝑔𝜑𝑙 − 𝜕𝑙𝑔𝜑𝜑)
Γ𝜑𝜑𝜃 =
1
2𝑔𝜃𝜃 (𝜕𝜑 𝑔𝜑𝜃⏟
=0
+ 𝜕𝜑 𝑔𝜑𝜃⏟=0
− 𝜕𝜃𝑔𝜑𝜑) +1
2𝑔𝜃𝜑⏟=0
(𝜕𝜑𝑔𝜑𝜑 + 𝜕𝜑𝑔𝜑𝜑 − 𝜕𝜑𝑔𝜑𝜑)
Γ𝜑𝜑𝜃 = −
1
2𝑔𝜃𝜃𝜕𝜃𝑔𝜑𝜑
On a 𝑔𝜃𝜃 =1
𝑟2 et 𝜕𝜃𝑔𝜑𝜑 = 2𝑟
2 sin 𝜃 cos 𝜃
Alors
Γ𝜑𝜑𝜃 = −sin 𝜃 cos 𝜃
De même manière on trouve
Γ𝜃𝜑𝜑= Γ𝜑𝜃
𝜑= cot 𝜃
Et les autres sont nuls.
3- Calcule de tenseur de courbure de Riemann de 𝕊2 :
𝑅𝑖𝑗𝑘𝑙 = 𝜕𝑖Γ𝑗𝑘
𝑙 + Γ𝑗𝑘𝑟 Γ𝑖𝑟
𝑙 − 𝜕𝑗Γ𝑖𝑘𝑙 − Γ𝑖𝑘
𝑡 Γ𝑗𝑡𝑙
On a (𝑖, 𝑗, 𝑘, 𝑙) = (𝜃, 𝜑) et la sommation sur 𝑟, 𝑡 prend aussi les valeurs 𝜃, 𝜑
𝑅𝜃𝜃𝜃𝜃 = 𝜕𝜃 Γ𝜃𝜃
𝜃⏟=0
+ Γ𝜃𝜃𝑟⏟=0
Γ𝜃𝑟𝜃 − 𝜕𝜃 Γ𝜃𝜃
𝜃⏟=0
− Γ𝜃𝜃𝑡⏟=0
Γ𝑡𝜃 = 0
𝑅𝜃𝜑𝜑𝜃 = 𝜕𝜃Γ𝜑𝜑
𝜃 + Γ𝜑𝜑𝑟 Γ𝜃𝑟
𝜃 − 𝜕𝜑Γ𝜃𝜑𝜃
⏟ =0
− Γ𝜃𝜑𝑡 Γ𝜑𝑡
𝜃
= 𝜕𝜃Γ𝜑𝜑𝜃 + Γ𝜑𝜑
𝜃 Γ𝜃𝜃𝜃⏟=0
+ Γ𝜑𝜑𝜑Γ𝜃𝜑𝜃
⏟ =0
− Γ𝜃𝜑𝜃 Γ𝜑𝜃
𝜃⏟ =0
− Γ𝜃𝜑𝜑Γ𝜑𝜑𝜃⏟=0
= 𝜕𝜃Γ𝜑𝜑𝜃

88
𝑅𝜃𝜑𝜑𝜃 = sin2 𝜃 − cos2 𝜃
De même manière on trouve les autres éléments de tenseur de Riemann.
4- Calcule de tenseur de courbure de Ricci 𝑅𝑖𝑗 = 𝑅𝑖𝑟𝑗𝑟
𝑅𝜑𝜑 = 𝑅𝜑𝜃𝜑𝜃 = 𝜕𝜑 Γ𝜃𝜑
𝜃⏟=0
+ Γ𝜃𝜑𝑟 Γ𝜑𝑟
𝜃 − 𝜕𝜃Γ𝜑𝜑𝜃 − Γ𝜑𝜑
𝑡 Γ𝜃𝑡𝜃
⏟ =0
= Γ𝜃𝜑𝜑Γ𝜑𝜑𝜃 − 𝜕𝜃Γ𝜑𝜑
𝜃
𝑅𝜑𝜑 = −sin2 𝜃
De même vous pouvez calculer les autres composantes de tenseur de Ricci. (Sont
aussi des valeurs du tenseurs de Riemann).
5- Calcul d’équation géodésique de la sphère sous forme cot 𝜃 = 𝛼 cos(𝜑 − 𝜑0)
Généralement l’équation géodésique s’écrit
�̈�𝑙(𝑡) + �̇�𝛼(𝑡)�̇�𝛽(𝑡)Γ𝛼𝛽𝑙 = 0
Les variables sont (𝑥1, 𝑥2) = (𝜃, 𝜑),
Pour 𝒍 = 𝟏 c’est-à-dire 𝒙𝒍 = 𝜽
�̈�1(𝑡) + �̇�𝛼(𝑡)�̇�𝛽(𝑡)Γ𝛼𝛽1 = 0
�̈�(𝑡) + �̇�𝛼(𝑡)�̇�𝛽(𝑡)Γ𝛼𝛽𝜃 = 0
On a dans ce cas un symbole de Christoffel non nuls Γ𝜑𝜑𝜃 = −sin 𝜃 cos 𝜃
�̈�(𝑡) − sin 𝜃 cos 𝜃 �̇�2(𝑡) = 0
Pour 𝒍 = 𝟐 c’est-à-dire 𝒙𝒍 = 𝝋
De même on trouve
�̈�(𝑡) + �̇�𝛼(𝑡)�̇�𝛽(𝑡)Γ𝛼𝛽𝜑= 0
On a dans ce cas deux symboles de Christoffel non nuls Γ𝜃𝜑𝜑= Γ𝜑𝜃
𝜑= cot 𝜃
�̈�(𝑡) + �̇�(𝑡)�̇�(𝑡)Γ𝜃𝜑𝜑+ �̇�(𝑡)�̇�(𝑡)Γ𝜑𝜃
𝜑= 0
�̈�(𝑡) + 2 �̇�(𝑡)�̇�(𝑡)cot 𝜃 = 0

89
Voici donc deux équations géodésiques de la sphère :
�̈�(𝑡) − sin 𝜃 cos 𝜃 �̇�2(𝑡) = 0 (1)
�̈�(𝑡) + 2 �̇�(𝑡)�̇�(𝑡)cot 𝜃 = 0 (2)
Exercice3.
Soient 𝑎 > 𝑏 > 0 et 𝑓: ℝ2 → ℝ3 définie par
𝑓(𝜃, 𝜑) = ((𝑎 + 𝑏 cos 𝜃) cos𝜑 , (𝑎 + 𝑏 cos 𝜃) sin𝜑 , 𝑏 sin 𝜃): L'application f paramétrise un tore 𝕋2 dans ℝ3. L’espace ℝ3 est muni de la distance métrique 𝑑𝑠2 = 𝑑𝑥1
2 + 𝑑𝑥22 + 𝑑𝑥3
2
1. Calculer la métrique induite sur le tore.
2. Calculer les symboles de Christoffel Γ𝑖𝑗𝑘 à partir de la métrique sur le tore.
3. Calculer le tenseur de courbure, le tenseur de Ricci et la courbure scalaire.
4. Donner l'équation déférentielle pour les géodésiques.
Note de Réponse.
1- Calcule de la métrique 𝑔𝑖𝑗 pour (𝑖, 𝑗) = (𝜃, 𝜑)
𝑔𝑖𝑗 = (𝑔𝜃𝜃 𝑔𝜃𝜑𝑔𝜑𝜃 𝑔𝜑𝜑
) =
(
𝜕𝑓
𝜕𝜃.𝜕𝑓
𝜕𝜃
𝜕𝑓
𝜕𝜃.𝜕𝑓
𝜕𝜑𝜕𝑓
𝜕𝜑.𝜕𝑓
𝜕𝜃
𝜕𝑓
𝜕𝜑.𝜕𝑓
𝜕𝜑)
𝜕𝑓
𝜕𝜃.𝜕𝑓
𝜕𝜃= (−(𝑎 + 𝑏 cos𝜑) sin 𝜃 , (𝑎 + 𝑏 cos𝜑) cos 𝜃 , 0) (
−(𝑎 + 𝑏 cos𝜑) sin 𝜃(𝑎 + 𝑏 cos𝜑) cos 𝜃
0
)
𝜕𝑓
𝜕𝜃.𝜕𝑓
𝜕𝜃= 𝑏2(𝑎 + 𝑏 cos𝜑)2
De même
𝜕𝑓
𝜕𝜃.𝜕𝑓
𝜕𝜑=𝜕𝑓
𝜕𝜑.𝜕𝑓
𝜕𝜃= 0

90
𝜕𝑓
𝜕𝜑.𝜕𝑓
𝜕𝜑= (𝑎 + 𝑏 cos𝜑)2
On trouve donc
𝑔𝑖𝑗 = (𝑔𝜃𝜃 𝑔𝜃𝜑𝑔𝜑𝜃 𝑔𝜑𝜑
) = (𝑏2 00 (𝑎 + 𝑏 cos𝜑)2
)
Vous allez consulter l’exercice précédent pour voir la méthode de résolution de ce
problème.
Bon courage.

91
Plus d’autres géométries :
Extraits de Wikipédia
Géométrie symplectique
La géométrie symplectique est l'étude des formes symplectiques, i.e. des formes différentielles fermées non dégénérées . Ces objets ont été
introduits dans l'optique d'une formulation mathématique de la mécanique classique. Si les motivations physiques remontent à Lagrange et Hamilton, la géométrie symplectique s'est formée comme domaine d'études à part entière
depuis les années 1960 et est aujourd'hui devenu un domaine actif de recherche. Contrairement à la géométrie riemannienne, des questions
d'existence des structures se posent. Les principaux moteurs de recherche sont la conjecture d'Arnold, la conjecture de Weinstein et la quantification.
Géométrie affine
La géométrie affine est la géométrie des espaces affines : il s'agit grossièrement d'ensembles de points définis par des propriétés spécifiques permettant de parler d'alignement, de parallélisme, d'intersection. Les notions de longueur et d'angle lui sont toutefois étrangères : elles dépendent de structures supplémentaires, traitées dans le cadre de la géométrie euclidienne.
Dissocier les notions propres à la géométrie affine est récent dans l'histoire des mathématiques. La définition formelle actuelle d'un espace affine présuppose la donnée d'un espace vectoriel, appelé l'espace directeur. Deux points d'un espace affine peuvent se soustraire pour donner un vecteur de l'espace directeur.
Parmi les résultats remarquables de la géométrie affine, on peut citer :
• Le théorème de Thalès, • L’associativité du barycentre, • Le théorème de Ménélaüs, • Le théorème de Ceva, etc.
Un certain nombre de résultats de la géométrie affine s'étendent dans le cadre de la géométrie projective. Le complémentaire d'un hyperplan projectif dans un espace projectif apparait naturellement comme un espace affine.
Le groupe de transformations d'un espace affine est appelé groupe affine. Il est engendré par les dilatations, les transvections, et les translations.

92
Certaines transformations, comme les inversions, ne préservent pas les propriétés de la géométrie affine.
En géométrie différentielle, la donnée d'une connexion plate équivaut à la donnée d'un atlas dont les applications de changement de cartes sont des transformations affines.
Géométrie synthétique La géométrie synthétique ou géométrie pure1 est fondée sur une approche axiomatique (donc, « purement logique ») de la géométrie. Elle constitue une branche de la géométrie étudiant diverses propriétés et divers théorèmes uniquement par des méthodes d'intersections, de transformations et de constructions. Elle s'oppose à la géométrie analytique et refuse systématiquement l'utilisation des propriétés analytiques des figures ou l'appel aux coordonnées. Ses concepts principaux sont l'intersection, les transformations y compris par polaires réciproques, la logique. Un outil très puissant qu'elle utilise est la théorie des ensembles, par le biais des propriétés structurelles (groupe, groupe commutatif, etc.) de tel ou tel ensemble de transformations.
La géométrie pure est antérieure à la géométrie analytique (voir l'histoire de la géométrie) et englobe donc tous les travaux antérieurs à cette dernière. Toutefois, on assimile parfois le terme de géométrie synthétique au courant qui s'est affirmé, en réaction à l'emploi jugé abusif des méthodes analytiques au début du XIXe siècle. Les travaux les plus connus de ce courant furent l'œuvre de Monge, Brianchon, Dupin, Gergonne, Chasles, Poncelet, Steiner qui développa une approche synthétique de la géométrie projective, Lemoine, von Staudt.
Au début du XIXe siècle, quelques géomètres comme Gergonne ont exprimé une inquiétude, celle de voir disparaitre la géométrie pure au profit de la géométrie analytique. Le reproche était que la géométrie analytique permet certes de démontrer une propriété à l'aide d'opérations sur les nombres dans un système de coordonnées, mais sans comprendre fondamentalement pourquoi cette propriété est vraie géométriquement. Une excellente illustration de cette controverse réside dans le problème d'Apollonius :« étant donnés trois cercles du plan, construire les huit cercles qui leur sont tangents ». Les partisans de la géométrie dite synthétique, à l'aide d'une démonstration élégante reposant uniquement sur des concepts de similitude et polarité, y voyaient l'emblème de leur supériorité sur les analytiques. Dans l'enseignement secondaire en France (et aussi dans d'autres

93
pays), la géométrie synthétique a eu tendance à être supplantée par la géométrie analytique dans les années 1960-1970, lors de la période dite des mathématiques modernes, avant d'effectuer un retour en tant que base de l'apprentissage du raisonnement.
Géométrie elliptique
Une géométrie elliptique est une géométrie non euclidienne. Les axiomes sont identiques à ceux de la géométrie euclidienne à l'exception de l'axiome des parallèles : en géométrie elliptique, étant donnés une droite et un point extérieur à cette droite, il n'existe aucune droite parallèle à cette droite passant par ce point. Il est équivalent de dire que la somme des angles d'un triangle est toujours supérieure à 180°.
En fait Giovanni Girolamo Saccheri avait démontré en 1733 que ce résultat est incompatible avec les quatre premiers postulats d'Euclide; la géométrie elliptique doit donc modifier un autre axiome (qui restait implicite dans l'œuvre d'Euclide) stipulant que si trois points sont alignés alors l'un de ces points est entre les deux autres. L'inexistence des parallèles peut alors être déduite de la négation de cet axiome1. La géométrie elliptique n'est donc pas une géométrie absolue.
La géométrie sphérique est un modèle important de géométrie elliptique.
Géométrie sphérique La géométrie sphérique est une branche de la géométrie qui s'intéresse à la surface bidimensionnelle d'une sphère. C'est un exemple de géométrie non euclidienne.
En géométrie plane, les concepts de base sont les points et les droites. Sur une surface plus générale, les points gardent leur sens usuel ; par contre, les équivalents des droites sont définies comme les lignes matérialisant le chemin le plus court entre les points, qu'on appelle des géodésiques. Sur la sphère, les géodésiques sont les grands cercles, et les autres concepts géométriques sont définis comme dans le plan euclidien, mais avec les grands cercles remplaçant les droites.
Les angles de la géométrie sphérique sont définis entre les grands cercles, ce qui donne naissance à une trigonométrie sphérique, différant de la trigonométrie plane sous bien des aspects. Par exemple, la somme des angles d'un triangle, en géométrie sphérique, excède 180°. C’est cet excès angulaire qui correspond au signe positif de la courbure de l’espace dans cette géométrie.

94
La géométrie sphérique est le modèle le plus simple de la géométrie elliptique, dans laquelle les droites ne sont jamais parallèles, et où l’espace présente en tout point et dans toutes les directions une courbure positive. La géométrie elliptique est dérivée de la géométrie sphérique, topologiquement équivalente, mais qui n’impose pas que cette courbure soit constante, juste qu'elle reste strictement positive (on peut se la représenter comme la géométrie locale tangente à la surface d’un ellipsoïde et non d’une sphère).
La géométrie sphérique a des applications pratiques importantes en navigation, en astronomie et en tectonique des plaques.
Géométrie algébrique La géométrie algébrique est un domaine des mathématiques qui, historiquement, s'est d'abord intéressé à des objets géométriques (courbes, surfaces…) composés des points dont les coordonnées vérifiaient des équations ne faisant intervenir que des sommes et des produits (par exemple le cercle unité dans le plan rapporté à un repère orthonormé admet pour équation x2 + y2=1 La simplicité de cette définition fait qu'elle embrasse un grand nombre d'objets et qu'elle permet de développer une théorie riche. Les besoins théoriques ont contraint les mathématiciens à introduire des objets plus généraux dont l'étude a eu des applications bien au-delà de la simple géométrie algébrique ; en théorie des nombres par exemple, cela a conduit à une preuve du grand théorème de Fermat.
Cette branche des mathématiques n'a désormais plus grand-chose à voir avec la géométrie analytique dont elle est en partie issue.
Les premiers travaux de cette nature remontent aux mathématiques arabes. Omar Khayyam proposa une méthode de résolution des équations cubiques par intersection d'un cercle et d'une parabole. Il combina la trigonométrie et les approximations fonctionnelles pour obtenir des méthodes de résolution géométriques des équations algébriques. Cette branche des mathématiques est maintenant appelée algèbre géométrique.
La Géométrie de Descartes, inaugurant l'étude des courbes algébriques par les méthodes de la géométrie analytique, marque la deuxième grande étape dans la genèse de cette discipline1.
À proprement parler, il faut attendre le début du vingtième siècle pour que la géométrie algébrique devienne un domaine à part entière. Cela fut initié, d'une part, par les travaux de David Hilbert, notamment son théorème des zéros, qui permettent de s'affanchir des méthodes de l'analyse pour n'utiliser que des méthodes algébriques (algèbre commutative). Cela fut développé, d'autre part, par l'école italienne (en) de la fin du XIXe siècle (Enriques, Chisini (it), Castelnuovo, Segre…). Ces géomètres étudiaient

95
courbes et surfaces de l'espace projectif (réel et complexe). Ils introduisirent les notions de points voisins, points proches, points génériques afin d'avoir une interprétation géométrique du théorème de Bézout. Le style assez libre de l'école italienne reste éloigné de la rigueur actuelle. Ce fut principalement André Weil qui introduisit, vers la fin des années 1930, un formalisme permettant de démontrer rigoureusement leurs résultats. Les travaux du Français Émile Picard conduisirent au groupe des diviseurs et au groupe qui porte son nom. On peut aussi mentionner les travaux de Max Noether en Allemagne.
Après 1930, les écoles américaine (Zariski, Mumford…), allemande (Noether, Brauer), russe (Kolmogorov…) et française (Weil, Chevalley…) développèrent sous une forme plus algébrique l'étude des variétés sur un corps commutatif quelconque en utilisant essentiellement la théorie des anneaux.
Dans les années 1950, elle fut totalement transformée par les travaux de l'école française sous l'impulsion de Pierre Samuel, d'Henri Cartan, de Jean-Pierre Serre et d'Alexandre Grothendieck.
En une décennie, le domaine se développa, répondant à des questions classiques sur la géométrie des variétés algébriques. Des applications furent très vite trouvées en théorie des nombres. Jean-Pierre Serre et Alexandre Grothendieck établirent les bases de la théorie des faisceaux, et la notion de schéma s'imposa vers 1960.
La démonstration du théorème de Fermat-Wiles est un exemple notable d'application à la théorie des nombres de concepts de géométrie algébrique : les courbes elliptiques. Elle est en cela un des grands succès de la théorie.
Géométrie projective En mathématiques, la géométrie projective est le domaine de la géométrie qui modélise les notions intuitives de perspective et d'horizon. Elle étudie les propriétés inchangées des figures par projection.
Le mathématicien et architecte Girard Desargues fonde la géométrie projective dans son Brouillon Project d’une Atteinte aux événements des rencontres du cône avec un plan publié en 1639, où il l'utilise pour une théorie unifiée des coniques. Mais on trouve déjà des notions projectives dans les œuvres de Pappus d'Alexandrie (IVe siècle) qui introduit le rapport anharmonique et fait référence à Apollonius de Perga. L'œuvre de Desargues eut peu de succès de son temps, et fut oubliée jusqu’à sa redécouverte par l'éditeur et bibliophile Poudra au milieu du XIXe siècle. Ses contemporains ne comprirent pas la profondeur de ses travaux, à l'exception du jeune Blaise Pascal, qui les poursuit, et démontre en particulier un théorème proche de celui aujourd'hui appelé théorème de Pascal1.
96
Poncelet réinvente la géométrie projective au début du XIXe siècle, très certainement influencé par la géométrie descriptive enseignée par son professeur à l'école polytechnique, Gaspard Monge2. Il publie en 1822 le Traité des propriétés géométriques des figures. Indépendamment, un autre élève de Monge, Joseph Gergonne découvre lui aussi à la même époque certains des principes de la géométrie projective3. Poncelet et Gergonne, par des voies différentes, mettent en évidence le principe de dualité, propre à la géométrie projective, où, par exemple, deux droites distinctes du plan sont toujours sécantes.
August Ferdinand Möbius en 1827 introduit les coordonnées homogènes qui permettent d'appliquer les méthodes de la géométrie analytique à la géométrie projective4, travail auquel se consacre également Julius Plücker5. Parallèlement Jakob Steiner développe l'approche par la géométrie synthétique.
Mais c'est Felix Klein qui, à la fin du XIXe siècle, clarifie le lien entre géométrie projective et géométrie euclidienne. Sous l'influence de son programme d'Erlangen a lieu une évolution conceptuelle majeure ; tandis que, jusque-là, la géométrie était la science des figures, elle devient l'étude des transformations de figures : les géomètres du tournant du siècle se concentrent désormais sur la composition des transformations, la structure de certains groupes de transformations, les invariants de telle ou telle famille de transformations, les axiomes minimaux permettant ces propriétés de transformations.
Aujourd'hui certaines notions élémentaires de géométrie projective sont utilisées dans les systèmes de vision par ordinateur et de rendu graphique
Topologie algébrique La topologie algébrique, anciennement appelée topologie combinatoire, est une branche des mathématiques appliquant les outils de l'algèbre dans l'étude des espaces topologiques. Plus exactement, elle cherche à associer de manière naturelle des invariants algébriques aux structures topologiques associées. La naturalité signifie que ces invariants vérifient des propriétés de factorialité au sens de la théorie des catégories.
L'idée fondamentale est de pouvoir associer à tout espace topologique des objets algébriques (nombre, groupe, espace vectoriel…), de sorte qu'à deux espaces homéomorphes soient associées deux structures isomorphes. De tels objets sont appelés des invariants algébriques. En termes savants, il s'agit d'étudier des foncteurs depuis la catégorie des espaces topologiques sur une catégorie algébrique, comme les catégories de groupes, algèbres, groupoïdes,

97
etc. Des résultats de topologie passent alors par la démonstration plus abordable de propriétés algébriques.
Parmi les invariants notables, citons :
• Le groupe fondamental d'un espace topologique X en un point x : l'ensemble des classes d'homotopie des lacets de X de base x, la loi de composition interne étant la concaténation des lacets ;
• Les groupes d'homotopie supérieure d'un espace topologique X en un point x ;
• Les groupes d'homologie ou de cohomologie d'un espace topologique X ; • Les classes caractéristiques d'un fibré vectoriel réel, complexe, euclidien
ou hermitien.
Géométrie riemannienne La géométrie riemannienne est une branche de la géométrie différentielle nommée en l'honneur du mathématicien Bernhard Riemann, qui introduisit le concept fondateur de variété géométrique. Elle étend les méthodes de la géométrie analytique en utilisant des coordonnées locales pour effectuer l'étude d'espaces courbes sur lesquels existent des notions d'angle et de longueur.
Les concepts les plus notables de la géométrie riemannienne sont la courbure de l'espace étudié et les géodésiques, courbes résolvant un problème de plus court chemin sur cet espace. Plus généralement, la géométrie riemannienne a pour but l'étude locale et globale des variétés riemanniennes, c'est-à-dire les variétés différentielles munies d'une métrique riemannienne, voire des fibrés vectoriels riemanniens.
Il existe aussi des variétés pseudo-riemanniennes, généralisant les variétés riemanniennes, qui en restent assez proches par bien des aspects, et qui permettent notamment de modéliser l'espace-temps en physique.
Le premier pas de la géométrie riemannienne remonte aux travaux de Bernhard Riemann au dix-neuvième siècle et en particulier lors d'une conférence inaugurale intitulée Über die Hypothesen, welche der Geometrie zu Grunde liegen1 (soit en français : Sur les hypothèses sous-jacentes à la géométrie). C'est une généralisation directe de la géométrie différentielle des surfaces de Gauss en n dimensions. Ces nouvelles idées ont mené directement à la géométrie non euclidienne et à la relativité générale par exemple.
La géométrie riemannienne s'est fortement développée durant la seconde moitié du XXe siècle. Mais les premiers travaux dans ce domaine se confondent avec la naissance du concept de variété différentielle.

98
Géométrie discrète La géométrie discrète est une branche de la géométrie. On parle de géométrie discrète pour la distinguer de la géométrie « continue ». Tout comme cette dernière, elle peut être analytique, les objets sont dans ce cas décrits par des inéquations.
Un exemple simple : la géométrie continue en deux dimensions permet de définir des droites, des cercles dans un plan. Ces objets sont des ensembles de points qui sont des couples de nombres réels. Dans ce contexte, la géométrie discrète se proposera de définir et de manipuler des ensembles de points à coordonnées entières qui formeront des droites ou des cercles discrets. L'essor de cette discipline est due à l'essor de l'informatique qui permet de manipuler exactement des objets discrets. Les principales applications de la géométrie discrète sont la synthèse d'image, l'analyse et la reconnaissance de formes.
Il existe deux transformations permettant de passer d'un espace discret à un espace continu (et vice versa) : ces deux transformations sont respectivement la reconstruction (appelée aussi continuation) et la discrétisation. Ces transformations ne sont pas bijectives car toute discrétisation induit une perte d'information.
99
Bibliographie
[1] Azzouz Awane. Cours de géométrie différentielle. DEA. 2001-2005 a la Faculté
des Sciences Ben M'sik. Casablanca. Maroc, 2005, pp.214. <Cel-00277648>.
[2] Le cours de monsieur N. Fahssi enseignant à Fsr Rabat -Maroc.
[3] Vincent GUEDJ Géométrie différentielle 9 décembre 2015.
[4] Claude Viterbo Notes de cours de Géométrie différentielle 27 juin 2014. [5] Joel W. Robbin, UW Madison, Dietmar A. Salamon and ETH Z¨urich
INTRODUCTION TO DIFFERENTIAL GEOMETRY 5 September 2013.
[6] Des calculs sont faits par l’auteur.
[7]Maximilien Holmberg-Péroux, Professeure Responsable prof. Kathryn Hess-
Bellwald Dirigé par Marc Stephan ; Les Fibrés en Homotopie, Année
Universitaire : 2012-2013Semestre d’Automne-Hiver, École Polytechnique
Fédérale de Lausanne Section de Mathématiques.