geometry book 2 stereometry
DESCRIPTION
Kiselev's classical geometry book.TRANSCRIPT
Kiselev's
GEOMETRY
Book II. STEREOMETRY
by
A. P. Kisele.v
Adapted from Russian
by Alexander Givental
Sumizdat
ELIHU BURRITT LIBRARY
CENTRAL CONNECTICUT STATE UNIVERSITY
NEW BRITAIN, CONNECTICUT 06050

Published by Sumizdat5426 HillsideAvenue, El Cerrito, California 94530, USA
http://www.sumizdat.org
University of California\177 Berkeley Cataloging-in-Publication Data
Kiselev, A. (Andrei Petrovich)Geometriia.Chast 2, Stereometriia. English
Kiselev's Geometry. Book II, Stereomerry / by A.P. Kiselev;
adapted from Russian by Alexander Givental.E1 Cerrito, Calif.: Sumizdat, 2008.
iv, 176 p.: ill.; 23 cm.Includesbibliographical references and index.
ISBN 978-0-9779852-1-01. Geometry. 2. Geometry, Solid. I. Givental, Alexander.
QA453.K57313 2008
Library of CongressControlNumber: 2008931141
(\177)2008 by Alexander l\177ivental
All rights reserved. Copies or derivative products of the whole work orany part of it may not be produced without the written permission fromAlexander Givental ([email protected]. edu), except for brief excerptsin connection with reviews or scholarly analysis.
Credits
Editing:Alisa Givental.
Consulting: Thomas Rike, Math Department, OaklandHigh School.
Linguistic advice: Ralph Raimi,Department of Mathematics, The University of Rochester.
Front cover features art photography \270 by Svetlana Tretyakova.
Art advising: Irina Mukhacheva, http://irinartstudio.com
Copyright advising: Ivan Rothman, attorney-at-law.
Cataloging-in-publication:Catherine Moreno,
Technical Services Department, Library, UC Berkeley.Layout, typesetting and graphics: using L\177v/\177Y and Xfig.
Printing and binding: Thomson-Shore,Inc.,http://www.tshore.comMember of the Green Press Initiative.7300West Joy Road, Dexter, Michigan 48130-9701, USA.Offset printing on 30% recycled paper; cover: by 4-colorprocesson Kivar-7.
ISBN 978-0-9779852-1-0

Contents
1 LINES AND PLANES12345
1Drawing a plane ..................... 1Parallel lines and planes ................. 3
Perpendiculars and slants ................ 9
Dihedral and some other angles ............. 16
Polyhedral angles ..................... 23
2 POLYHEDRA 29
1 Parallelepipeds and pyramids .............. 29
2 Volumes of prisms and pyramids ............ 39
3 Similarity of polyhedra .................. 514 Symmetries of space figures ............... 59
5 Regular polyhedra .................... 66
3 ROUND SOLIDS 75
i Cylinders and cones ................... 75
2 The ball .......................... 88
4 VECTORS AND FOUNDATIONS 107
1 Algebraicoperationswith vectors ............ 1072 Applicationsofvectorsto geometry ........... 1173 Foundations o\177 geometry ................. 1284 Introductionto non-Euclidean geometry ........ 1415 Isometries......................... 154
AFTERWORD ......................... 163BIBLIOGRAPHY....................... 171
INDEX ............................. 172
iii
The present volume completes the English adaptation of Kiselev's
Geometry. The first volume, Planimetry, was publishedas [4] (see sec-tion Bibliography) and will be referred to as Book I. The reader is di-
rected to Translator's Foreword in Book I for background information onthe original work [5, 6]. Preparing Book II, I added about 250 exercises,
expanded the sections on Similarity of polyhcdra, Symmetries of space fig-
urcs and Regular polyhcdra, and wrote a new, last chapter.It contains
a geometric approach to vectors, followedby a vector approach to logicalfoundations of geometry, and concludeswith a constructive introduction
into non-Euclidean plane geometry. While some accounts of such topicsare certainly expected of every modern course in elementary geometry, anyspecific choices may have non-obvious mathematical and pedagogical im-plications. Someof them are explained in Translator's Afterword Three
controversies about mathematics, geometry, and education.
Alexander Civental
Department of MathematicsUniversity of California Berkeley
July, 2008
Authors cited in this book:
PlatoEuclidof Alexandria
Archimedes of SyracuseMenelaus of AlexandriaPappus of AlexandriaJohannesKeplerG\177rard Desargues
Bonaventura CavalieriGiovanni CevaAugustin Louis CauchyNikolai Lobachevsky
Jdnos Bolyai
Arthur CayleyBernhard RiemannEugeneo BeltramiHermannSchwarz
Georg CantorFelix KleinDavid HilbertHermann MinkowskiMaxDehn
Albert Einstein
Hermann Weyl
\17727 - 3\1777 B.C.about 325 - 265 B.C.
287- 212B.C.about 70 - 1\1770 A.D.
about 290 - 350 A.D.1571 - 16301591- 16611598 - 16\177716\1777- 173\177
1789 - 18571792 - 18561802- 18601821- 1895
1826 - 18661835 - 189918\1773 - 192118\1775 - 191818\1779 - 19251862 - 19\1773
186\177 - 19091878 - 19521879- 19551885- 1955
iv

Chapter I
LINES AND PLANES
I Drawing a plane
1. Preliminary remarks. In stereometry (called also solid
geometry) one studies geometric figures not all of whose elements
fit the same plane.
Geometric figures in spaceare shown on the plane of a diagramfollowing certain conventions, intended to make the figuresand theirdiagrams appear alike.
Many real objects around us have surfaceswhich resemble geo-
metric planes and are shaped likerectangles:the cover of a book, awindow pane, the surfaceof a desk, etc. When seen at an angle andfrom a distance, such surfaces appear to have the shapeof a paral-
lelogram. It is customary, therefore, to show a planein a diagram
as a parallelogram. The plane is usually denoted by one letter, e.g.\"the plane M\" (Figure 1).
Figure 1
2. Basic properties of the plane. Let us point out the fol-lowing properties of planes, which are accepted without proof, i.e.considered axioms.

2 Chapter1. LINES AND PLANES
(1) If two points 1 of a line lie in a given plane, then every pointof the line lies in this plane.
(2) If two planes have a commonpoint, then they intersect in aline passing through this point.
(3) Through every three points not lying on the same line, onecan draw a plane, and such a plane is unique.
3. Coro:]_:]_ar\361es.(1) Through a line and a point outside it, onecan draw a plane, and such a plane is unique. Indeed,the point
together with any two points on the line form three points not lyingon the same line, through which a plane can therefore be drawn, andsucha plane is unique.
(2) Through two intersecting lines, one can draw a plane, and
such a plane is unique. Indeed,taking the intersection point and
one more point on eachof the lines, we obtain three points throughwhich a planecan be drawn, and such a plane is unique.
(3) Through two parallel lines, one can draw only one plane. In-deed,parallel lines, by definition, lie in the same plane. Sucha plane
is unique, since through \177one of the lines and any point of the otherline,at most one plane can be drawn.
4. Rotating a planeabouta line.Through each line in space,infinitely many planes can be drawn.
Indeed, let a line a be given (Figure2). Take any point A outside
it. Through the line a and the point A, a unique plane is passing(\3653). Let us call this plane M. Take a new point B outside the
plane M. Through the line a and the point B, too, a unique planeis passing. Let us call this plane N. It cannot coincide with M,
since it contains the point B which does not lie in the plane M.
Furthermore, we can take in spaceyet another point C outside theplanes M and N. Through the line a and the: point C, yet a new
plane is passing. Denote it P. It coincidesneither with M nor with
N, since it contains the point C which lies neither in the plane Mnor in the planeN. Proceeding by taking more and more points inspace, we will thus obtain more and more planes passing throughthe given line a. There will be infinitely many such planes. All these
planes can be considered as variouspositionsofthe sameplane whichrotates about the line a.
We may therefore formulate one more property of the plane: aplane can be rotated about every line lying in this plane.
\177As in Book I, we will always assume that expressions like \"three points,\" \"twoplanes,\" etc. refer to distinct points, planes, etc.
2. parallel lines and planes3
EXERCISES
1. Explain why three-legged stools standing on flat floor are always
stable, while many four-legged ones totter.2. Usingthe axiomsfrom \3652, show that the plane described in theproof of Corollary1 of \3653 contains, indeed, the given line and thegiven point as required. Similarly, complete the proofs of Corollaries2 and 3.
$. Prove that through any two points in spaceinfinitely many planes
can be drawn.
4. Prove that if through three given points two planes can be drawn,
then infinitely many planes through these points can be drawn.
/5.* Prove that several lines in space, intersecting pairwise,eitherliein the same plane or pass through the samepoint.
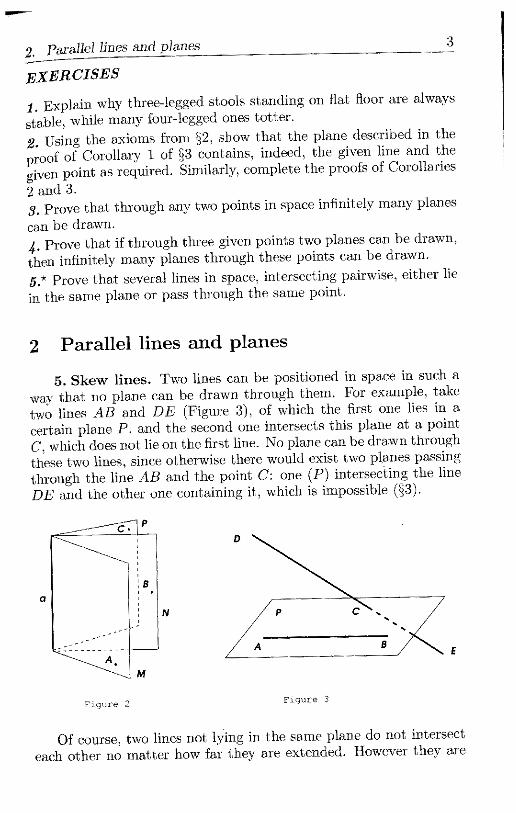
2 Parallel lines and planes5.Skew lines. Two lines can be positioned in space in sucha
way that no plane can be drawn through them. For example, take
two lines AB and DE (Figure 3), of which the first one lies in acertain plane P, and the secondone intersects this plane at a pointC, whichdoesnot lieonthe first line. No plane can be drawn throughthesetwo lines, since otherwise there would exist two p!anes passingthrough the line AB and the point C: one (P) intersecting the line
DE and the other one containingit, which is impossible (\3653).
Figure 2
N
D
Figure 3
Of course, two lines not lying in the same plane do not intersecteachotherno matter how far they are extended. Howeverthey are

4 Chapter 1. LINES AND PLANES
not calledparallel, the term being reserved for those lines which,being in the same plane, do not intersect each other no matterhow
far they are extended.
Two lines not lying in the same plane are called skew lines.6. A line and a plane parallel to each other. A plane and a
line not lying in this planearecalled parallel if they do not intersecteach other no matterhow far they are extended.
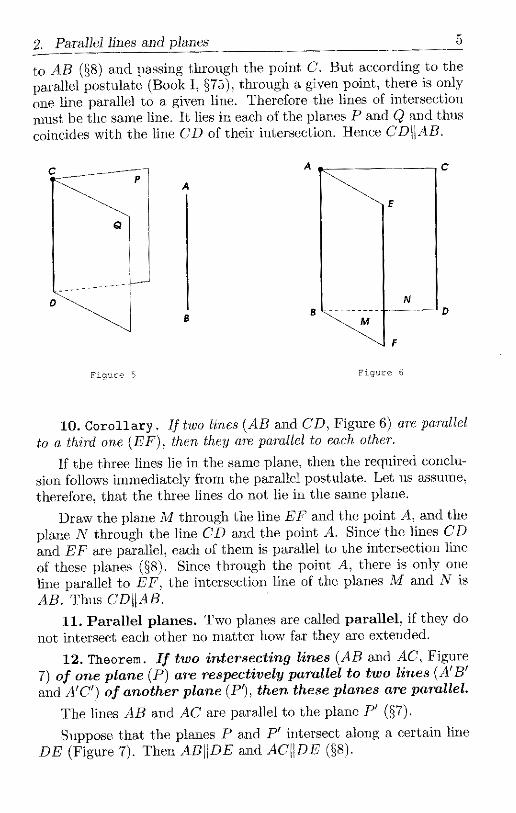
7. Theorem. If a given line (AB, Figure 4) does not lie in agiven plane (P) but is parallelto a line(CD) that lies in it,then the given line is parallelto theplane.
Through AB and CD, draw the plane R and assumethat thelineAB intersects the plane P. Then the intersection point,beingapointof the line AB, lies in the plane R that containsAB, and atthe sametime it lies in the plane P, of course. Thenthe intersectionpoint,being in both planes R and P, must lie on the line CD ofintersection of these two planes. But this is impossible,sinceAB CD
by the hypothesis. Thus the assumption that the lineAB intersects
the plane P is false, and h,enceABIP.
Figure 4
8. Theorem. If a given line (AB, Figure4) is parallel to agiven plane (P), then it is parallelto the intersectionline
(CD) of the given plane with every plane (R) containing thegiven line.
Indeed, firstly the linesAB and CD lie in the same plane, andsecondlythey cannot intersect each other, since otherwise the lineAB would intersect the plane P, which is impossible.
9. Corollary.If a line (AB, Figure 5) is parallel to each of two'intersectingplanes(P and Q), then it is parallel to their intersectionline (CD).
Draw a plane through AB and any point C ofthe lineCD. Thisplane must intersect each of the planes P and Q alonga line parallel
2. Parallel lines and planes
to AB (\3658) and passing through the point C. But accordingto theparallel postulate (Book I, \36575),through a given point, there is only
one line parallel to a given line. Thereforethe linesof intersectionmust be the same line. It lies in each of the planesP and Q and thus
coincides with the line CD of their intersection.Hence CDIIAB.
A
A C
D
Figure 5 Figure 6
10. Corollary. If two lines (AB and CD, Figure 6) are parallelto a third one (EF), then they are parallel to each other.
If the threelines lie in the same plane, then the requiredconclu-sionfollows immediately from the parallel postulate. Let us assume,therefore,that the three lines do not tie in the sameplane.
Draw the plane M through the line EF and the point A, and the
plane N through the line CD and the point A. Since the lines CDand EF are parallel, each of them is parallel to the intersectionline
of these planes (\3658). Since through the point A, there is only one
line parallel to EF, the intersection line of the planesM and N is
AB. Thus CD[[AB.
11. Parallel planes.Two planes are called parallel, if they donot intersecteachother no matter how far they are extended.
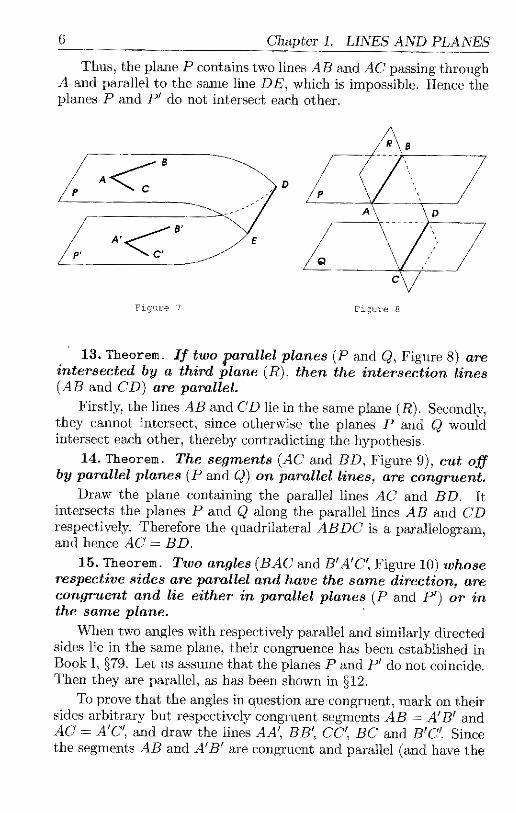
12. Theorem.If two intersecting lines (AB and AC, Figure7) of oneplane(P)arerespectively parallel to two lines (A'B'and A\177C \177)of another plane (P\177, then these planes are parallel.
The linesAB and AC are parallel to the plane P\177 (\3657).
Suppose that the planes P and P\177 intersect along a certain lineDE (Figure 7). Then ABllDEand ACIIDE (\3658).
6 Chapter 1. LINES AND PLANES
Thus,the planeP contains two lines AB and AC passing throughA and parallel to the same line DE, which is impossible.Hence the
planes P and P\177 do not intersect each other.
Figure 7 Figure 8
\337 13. Theorem. If two \177arallel planes (P and Q, Figure8) areintersectedby a third plane (R), then the intersection lines(AB and CD) are parallel.
Firstly, the linesAB and CDliein the same plane (R). Secondly,they cannot intersect, sinceotherwise the planes P and Q wouldintersect eachother,thereby contradicting the hypothesis.
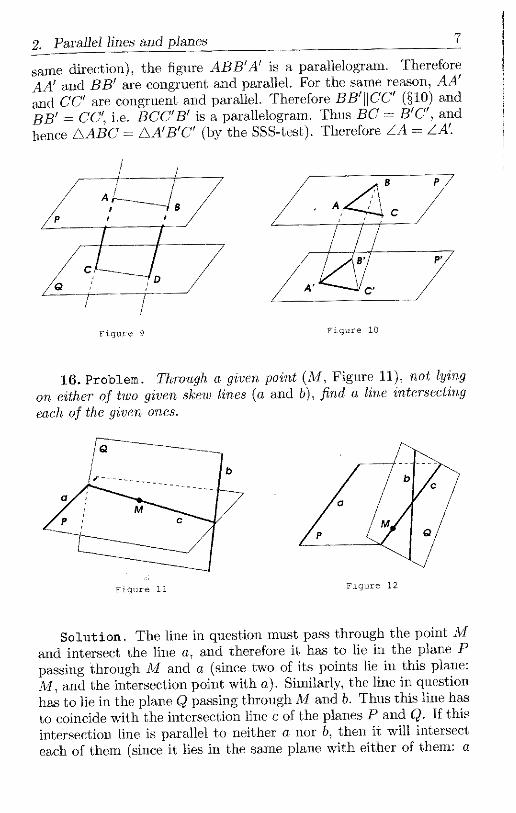
14. Theorem. The segments (AC and BD, Figure 9), cut off
by parallel planes (P and Q) on parallel lines, are congruent.Draw the planecontaining the parallel lines AC and BD. It
intersectsthe planesP and Q along the parallel lines AB and CDrespectively.Therefore the quadrilateral ABDC is a parallelogram,and henceAC = BD.
15. Theorem. Two angles (BACand B\177A\177C\177,Figure 10) whose
respective sides are parallel and have the samedirection,arecongruent and lie either in parallel planes (P and P\177) or inthe same plane.
When two angles with respectively parallel and similarlydirectedsideslie in the same plane, their congruence has been establishedin
Book I, \36579. Let us assume that the planes P and P\177 do not coincide.
Then they are parallel, as has beenshown in \36512.
To prove that the angles in question are congruent,markon their
sides arbitrary but respectively congruent segments AB - A\177B \177and
AC = ArC \177,and draw the lines AA t, BB \177,CC \177,BC and B\177C( Since
the segments AB and A\177B \177are congruent and parallel (and have the
2. Parallellinesand planes ?
same direction), the figure ABB'A' is a parallelogram.Therefore
AA \177and BB' are congruent and parallel. For the samereason, AA \177
and CC \177are congruent and parallel. Therefore BB/[[CC \177(\36510) and
BB \177- CC \177,i.e. BCC\177B \177is a parallelogram. Thus BC -- B/C \177,and
hence/XABC =/XA\177B\177C \177(by the SSS-test). Therefore \177A -
Figure 9 Figure 10
16. Problem. Through a given point (M, Figure 11), not lying
on either of two given skew lines (a and b), J\177nd a line intersectingeach of the given ones.
Figure 11
b
Figure 12
Solution. The line in questionmust pass through the point Mand intersect the line a, and therefore it has to lie in the plane Ppassingthrough M and a (since two of its points lie in this plane:
M, and the intersection point with a). Similarly, the line in questionhas to lie in the plane(\177passing through M and b. Thus this linehasto coincide with the intersection line c of the planesP and (\177. If this
intersection line is parallel to neithera nor b, then it will intersecteach of them (sinceit liesin the same plane with either of them: a

8 Chapter1. LINES AND PLANES
and c lie in the plane P, and b and c lie in the plane Q). Then theline c will intersect a and b and pass through M, and will therefore
provide the unique solution of the problem.If however clla (Figure
12) or c][b, then the problemhas no solution.17.Remark. There is some resemblance between the aboveprob-
lem,and the problems of constructing plane figures using drafting de-vicessuch as straightedge and compass. For purposes of describingfigures in space,the drafting devices become useless. Consequently,in solid geometry we will refrain from formulating construction prob-lems. Howeverthe questionof finding a geometric figure satisfying acertain set of requirementscanbe understood the same way as it hasbeen done in the above solution. Namely, one can seek to find out if
the required figure exists, and if it is unique (or, more generally, howmany solutions there are,and how the number of solutions dependson the given data).
18. Problem. Through a given point (A, Figure 13) not lying ina given plane (P), find a plane parallel to the given one.
Figure 13
Solution. On the plane P, draw an arbitrarypairofintersecting
lines BC' and BD. Draw two auxiliary planes: Ad through the point
A and the line BC', and N through the point A and the line BD.Every plane parallel to P and passing through A must intersect the
plane A4\177along the line AC '\177parallel to BC', and the plane N alongthelineAD \177parallel to BD (\36513).There is a uniqueplaneP\177 containing
the lines AC '\177and AD \177,and this plane is parallel to P (\36512). Thus
the solution exists and is unique.
Corollary. Through each point not lying on a given plane, thereexistsa unique plane parallel to the given one.
3. Perpendicularsand slants 9
EXERCISES
6. Prove that throughevery point in space, not lying on a given line,thereexistsa unique line parallel to the given one.7. Derivefrom the parallel postulate that, in a plane, two lines par-allelto a third one are parallel to each other.8. Provethat two planes parallel to a third one are parallelto each
other.
9. Prove that all lines parallel to a given plane and passing through
the same point lie in the same plane parallel to the given one.10. Provethat two parallel lines, lying respectively in two intersect-ing planes,are parallel to the intersection line of these planes.11. Can two planes intersect, if the first plane contains two lines
respectively parallel to two lines contained in the secondplane?
12. Prove that if a line a is parallelto a plane M, then every line
parallel to a and passingthrough a point of M lies in M.13. Provethat for every pair of skew lines a and b, there is a unique
pair of planes: one passingthrough a and parallel to b, the otherpassingthroughb and parallel to a, and that these planesareparallel.lJ. Given a pair of skew lines a and b, find the geometric locus ofpoints M for which there is no line passing through M and intersect-ing a and b.
15. Find a plane passing througha given point and parallel to twogiven lines. \177/
18. Find a line intersecting two given lines and parallelto a third
one.
17. Find the geometric locus of midpoints of segmentsconnectingagiven point with points lying on a given plane.1$. Let AB and CD be skew lines. Prove that the midpointsof the
segments AC, AD, BC, and BD are verticesofa parallelogram, and
that its plane is parallel to the linesAB and CD.
19.* Compute the ratios in whichthe planepassing through barycen-
ters of the triangles ABC, ACD, and ADB,not lying in the same
plane, divides the sides AB, AC, and AD.
3 Perpendiculars and slants
19. A line perpendicular to lines in a plane. In ordertounderstand which lines should be considered perpendicular to a given
plane, let us prove the following proposition.
10 Chapter1. LINES AND PLANES
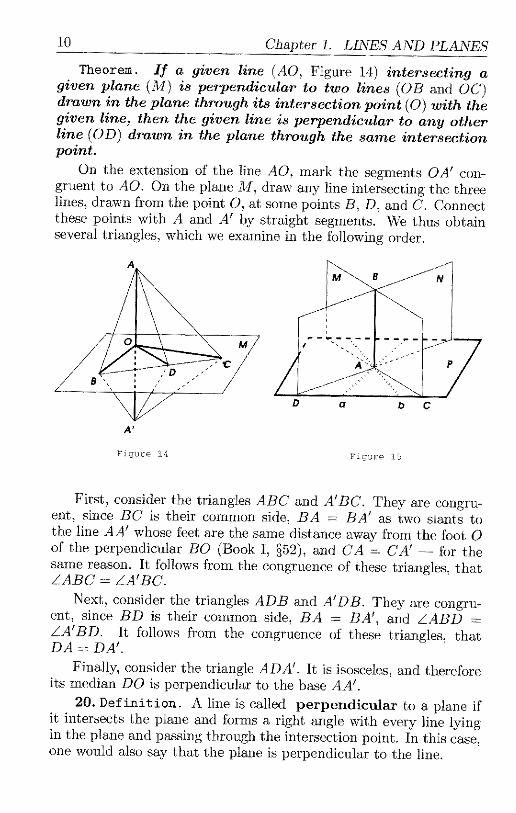
Theorem. If a given line (AO, Figure 14) intersecting agivenplane(M) is perpendicular to two lines (OB and OC)drawnin theplanethrough its intersection point (0) with thegiven line, then the givenlineis perpendicular to any other
line (OD) drawn in the plane through the same intersectionpoint.
On the extension of the line AO, mark the segmentsOA \177con-
gruent to AO. On the plane M, draw any line intersecting the threelines, drawn from the point O, at some points B, D, and C. Connect
these points with A and A \177by straight segments. We thus obtainseveral triangles,which we examine in the following order.
Figure 14 Figure 15
First, consider the triangles ABC and A\177BC. They are congru-ent, since BC is their commonside,BA = BA \177as two slants to
the line AA \177whose feet are the same distance away from the foot O
of the perpendicular BO (BookI, \36552), and CA = CA \177-- for the
same reason. It follows from the congruence of these triangles, thatXABC: XA\177BC.
Next, consider the triangles ADB and A\177DB. They are congru-
ent, since BD is their commonside,BA = BA \177, and ZABD -XA\177BD. It follows from the congruence of these triangles, thatDA = DA \177.
Finally, consider the triangle ADA \177.It is isosceles, and thereforeits median DO is perpendicular to the base AA \177.
20. De\234\361n\361t\361on. A line is called perpendicular to a plane if
it intersects the plane and forms a right anglewith every line lying
in the plane and passingthrough the intersection point. In this case,one would also say that the plane is perpendicular to the line.

3. Perpendiculars and slants 11
The previous theorem shows that a given line is perpendicular to
a plane whenever it is perpendicularto two lines lying in the planeand passing throughits intersectionpointwith the given line.
A line intersecting a plane, but not perpendicular to it, is calledoblique to this plane,or a slant.
The intersection point of a line with a planeis calledthe footofthe perpendicular or of the slant.
21. Theorem. Through every point (A, Figure 15) lying on
a given line (AB), a planeperpendicularto the linecan be
drawn, and such a plane is unique.Draw any two planes M and N through the line AB, and at the
point A, erect perpendiculars to AB inside these planes: AC in theplane M, and AD in the plane N. The plane P, passingthrough
the lines AC and AD, is perpendicular to AB. Conversely, every
plane perpendicular to AB at the point A must intersect M and Nalong lines perpendicularto AB,i.e.along AC and AD respectively.Therefore every plane perpendicularto AB at A coincides with P.
22. Corollary. All lines perpendicular to a given line (AB,Figure 15) at a given point (A) lie in the same plane, namely the
plane (P) perpendicular to the given line at the givenpoint.Indeed,the plane passing through any two lines perpendicular
to AB at A is perpendicular to AB at the point A and therefore
coincides with the plane P.23. Corollary. Through every point (C, Figure 15) not lying on
a given line (AB), one can draw a plane perpendicular to the givenline, and sucha planeis unique.
Draw an auxiliary plane M through C andthe lineAB, and dropfrom C the perpendicular CA to AB inside the planeM. Every
plane perpendicular to AB and passing through C must intersect
the plane M along a line perpendicularto AB, i.e. along the line
CA. Therefore such a plane must coincidewith the plane P passing
through the point A and perpendicular to the line AB.24. Corollary. At every point (A, Figure 15) of a given plane
(P), a perpendicularline (AB) can be erected, and such a line isunique.
In the plane P, draw two arbitrary linesa and b passing through
A. Every line perpendicular to P at the point A will be perpendicularto eacha and b, and therefore will lie in the plane M perpendicularto a at A, and in the plane N perpendicularto b at A. Thus it willcoincide with the intersection lineAB of the planes M and N.
12 Chapter1. LINES AND PLANES
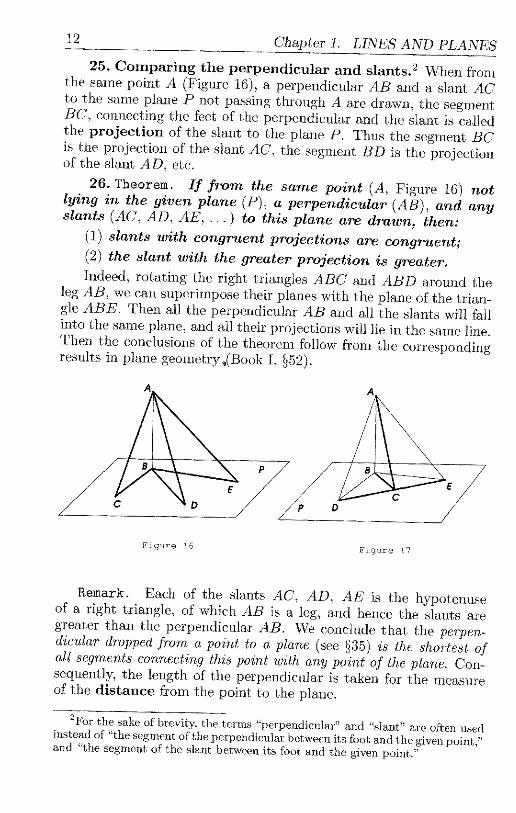
25. Comparing the perpendicular and slants. 2 When from
the same point A (Figure 16), a perpendicular AB and a slant AC
to the same plane P not passing throughA are drawn, the segmentBC, connecting the feet of the perpendicularand the slant is called
the projection of the slant to the plane P. Thus the segment BCis the projectionof the slant AC, the segment BD is the projectionof the slant AD, etc.
26. Theorem. If from the same point (A, Figure 16) not
lying in the given plane (P), a perpendicular(AB), and any
slants (AC, AD, AE, ...) to thisplaneare drawn, then:
(1) slants with congruent projections are congruent;(2)the slant with the greater projection is greater.
Indeed, rotating the right triangles ABE' and ABD around theleg AB, we can superimpose their planes with the plane of the trian-gleABE. Then all the perpendicular AB and all the slantswill fall
into the same plane, and all theirprojectionswill lie in the same line.
Then the conclusionsof the theoremfollow from the correspondingresults in plane geometry ,(Book I, \36552).
c
A
P ' B
E
Figure 16 Figure 17
Remark. Each of the slants AE', AD, AE is the hypotenuseof a right triangle,of which AB is a leg, and hence the slants aregreater than the perpendicular AB. We conclude that the perpen-dicular dropped from a point to a plane (see \36535) is the shortest ofall segments connectingthis point with any point of the plane. Con-sequently, the length of the perpendicular is taken for the measureof the distance from the point to the plane.
2For the sakeof brevity, the terms \"perpendicular\" and \"slant\" are often used
instead of \"the segment of the perpendicular between its foot and the given point,\"
and \"the segment of the slant between its foot and the given point.\"

3. Perpendiculars and slants 13
27. Converse theorems. If from a pointnot lying in a
given plane, a perpendicular and any slants are drawn, then:
(1) congruent slants have congruent projections;(2) greater slants have greater projections.We leave the proof (by reductio ad absurdurn) to the reader.28. The theorem of the threeperpendiculars. The follow-
ing theorem will prove useful later on.Theorem.The line(DE, Figure 17) drawn in a plane
through the foot of a slant (AC) and perpendicular to itsprojection (BC), is perpendicular to the slantitself.
On the line DE, mark arbitrary but congruent segmentsCDand CE, and connect each of the points A and B with D and E bystraight segments.Then we have: BD - BE (since B liesontheperpendicular bisector BC of the segment DE in the planeP), and
consequently AD - AE (as slants to the plane P with congruent
projections BD and BE). The triangle DAE is therefore isosceles,and hence its medianAC is perpendicular to the base DE.
This propositionis often called the theorem of the three perpen-dicularsbecauseit relates the following three perpendicular pairs:AB 2_ P, BC 2_ DE, and AC _h DE.
29. Converse theorem. If a slant (AC, Figure 17) to a given
plane (P) is perpendicular to a line (DE) passing through
the foot of the slant and lying in the plane, then the line..\177is
perpendicular to the projection (BC) of the slant.Repeatthe constructions performed in the proof of the direct
theorem,i.e.mark arbitrary but congruent segments CD and DE onthe lineDE, and connect each of the points A and B with D and E.Then wehave: AD - AE (since A lies in the plane of AADE on theperpendicularbisectorofthe segment DE), and consequently BD -BE (as projectionsof congruent slants AD and AE). The ADBEis thereforeisosceles,and hence its median BC is perpendicular tothe baseDE.
30.Relationsbetween parallel and perpendicular lines
and planes. There is a dependencebetween the properties of linesor planes to be parallel,and the property of a line and a plane tobe perpendicular. Namely, if certain elements of a given figure areparallel,onemay be able to conclude that certain other elementsareperpendicular, and conversely, if certain elements are perpendicular,then certainother elements turn out to be parallel. This relationbetweenparalleland perpendicular lines and planes is expressed bythe theoremsdescribedbelow.

14 Chapter 1. LINES AND PLANES
31. Theorem. If a plane(P, Figure 18) is perpendicular toone of two given parallel lines(AB), then it is perpendicularto the other (CD).
In the plane P, draw through the point B any two lines BE
and BF, and through the point D two lines DG and DH parallelto BE and BF respectively. Then we have: XABE = XCDGand
\177ABF = XCDH as angles with respectively parallel sides. ButXABE and XABF are right angles (since AB _L P), and hence
XCDG and ZCDH are alsoright angles. Therefore CD _k P (\36520).
Figure 18 Figure 19
32. Converse theorem. If two lines (AB and CD, Figure
19) are perpendicular to the same plane (P),thenthey are
parallel.
Let us assume the opposite, i.e. that the lines AB and CD are notparallel. Through the point D, draw the line parallel to AB; underour assumption,it will be a certain line DC \177different from DC. We
have: DC \177:_ P by the direct theorem, and and DC _\177 P by thehypotheses. Therefore two perpendiculars to the planeP are erected
at the same point D, which is impossibleby \36524. Therefore our
assumption was false, and hence the linesAB and CD are parallel.
33. Theorem. If a line (AA \177, Figure 20) is perpendicular
to one of two given parallelplanes(P and P\177), then it isperpendicular to the other.
Through the line AA \177,draw any two planes. Each of them in-tersectsthe planes P and P\177 along parallel lines: one along AB andA\177B \177,the other along AC and A\177C \177.Since the line AA \177is perpendic-
ular to P, it is perpendicular to the linesAB and AC, and therefore
it is also perpendicular to the lines A\177B \177and A\177C \177respectively par-
allel to them. Thus AA \177is perpendicular to the plane P\177 passing
through A\177B \177and A\177C \177.
3. Perpendiculars and slants 15
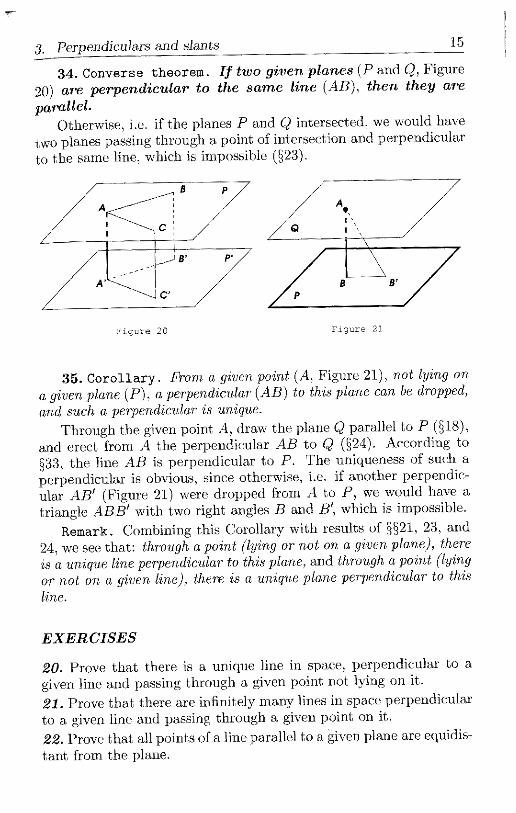
34. Converse theorem. If two given planes (P and (\177, Figure
20) are perpendicular to the same line (AB), then they areparallel.
Otherwise, i.e. if the planes P and Q intersected, we would havetwo planes passing through a point of intersection and perpendicularto the sameline,which is impossible (\36523).
Figure 20 Figure 21
35. Corollary. From a givenpoint (A, Figure 21), not lying ona given plane (P), a perpendicular(AB) to this plane can be dropped,and sucha perpendicularis unique.
Through the given point A, draw the plane(2 parallel to P (\36518),and erect from A the perpendicular AB to Q (\36524). According to
\36533, the line AB is perpendicular to P. The uniqueness of such a
perpendicular is obvious, since otherwise,i.e. if another perpendic-
ular AB' (Figure 21) were dropped from A to P, we would have atriangleABB'with two right angles B and B ', which is impossible.
Remark. Combining this Corollary with results of \365\36521, 23, and
24, we see that: through a point (lying or not on a given plane), thereis a unique line perpendicular to this plane, and through a point (lying
or not on a given line), thereis a unique plane perpendicular to thisline.
EXERCISES
20. Prove that thereis a unique line in space, perpendicular to agiven line and passingthrough a given point not lying on it.21. Provethat there are infinitely many lines in space perpendicularto a given line and passing through a given point on it.22.Prove that all points of a line parallel to a \177iven plane are equidis-
tant from the plane.

16 Chapter1. LINES AND PLANES
20\370. Prove that all points of one of two parallel planes are equidistantfrom the other.
24{.Provethat if a plane and a line are perpendicular to the sameline,then they are parallel to each other.
25. Provethat if a line a parallel to a plane P intersectsa line b
perpendicular to P, then a is perpendicularto b.26. Find a line perpendicular to two given skew lines.27. Prove that if a point A is equidistant from S, C, and D, thenthe projectionofA to the plane SCD is the circumcenterof ASCD.28. Find the geometric locus of points equidistant from: (a) two
given points, (b) three given non-collinear points.
4 Dihedral and some other angles
36. Dihedral angles. A plane is divided by a linelying in it into
two parts, called half-planes, and the lineis calledthe edge of each
of these half-planes. A figure in space formed by two half-planes(P and Q, Figure 22) which have the same edge (AS) is called a
dihedral angle. The line AS is calledtheedgeand the half-planes
P and Q faces of the dihedralangle.Space is divided by the facesinto two parts, calledthe interior, and exterior of the dihedral
angle (and defined similarly to how it was done in Book I, \36513 for
angles in plane geometry).
A dihedral angle is usually denoted by the two letters marking
the edge (e.g. a dihedral angleAS). If several dihedral angles in a
diagram have the sameedge,then we will denote each of them byfour letters, of which the middle two mark the edge,and the outer
two mark the faces (e.g. a dihedralangleSCDR,Figure 23).
If from an arbitrary point D on the edgeAS ofa dihedral angle
(Figure 24), a ray perpendicular to the edgeis drawn in each face,then the angle CDE formed by these two rays is called a linearangle of the dihedralangle.
The measure of the linear angle of a dihedralangledoesnot de-
pend on the position of its vertexon the edge. Namely, the linear
angles CDE and C'D'E' are congruent,becausetheir sides are re-spectively parallel and have the same direction.
The plane containing a linearangleofa dihedral angle is perpen-dicular to the edge sinceit containstwo lines perpendicular to it.
Thus, linear angles of a dihedralangleare obtained by intersecting
both faces by planes perpendicular to the edge.

4. Dihedr\177l \177nd some other angles 17
37. Congruence and comparisonof dihedralangles.Two
dihedral angles are congruent if they become superimposed whenoneof themis embedded into the interior of the other, so that theiredgescoincide;otherwise, the one of them that will lie inside theother is consideredsmaller.
c
D
Figure 22 Figure 23 Figure 24
Similarly to angles in plane geometry,dihedralangles can be
vertical, supplementary, etc.
If two supplementary dihedralanglesarecongruent to each other,
then each of them is calleda right dihedralangle.Theorems. (1) Congruent dihedral angles have congruent
linear angles.(2) The greater of two dihedral angles has the greater
linear angle.Let PABQ and ptA'B'Q' (Figure 25) be two dihedral angles.
Embed the angle A'B' into the angle AB so that the edgecoincides with the edgeAB, and the faceP' with the face P. Then,if these dihedral angles are congruent,the faceQ' will coincide with
the face Q. However, if the angle A'B' is smaller, the face Q' will
occupy a certain position Q\" in the interior of the dihedralangle AB.
Having noticed this, pick on the commonedgeany point B, and
through this point draw the planeR perpendicular to the edge. In-tersecting this planewith the faces of the dihedral angles, we obtaintheir linearangles. Clearly, if the dihedral angles coincide, then theirlinearangles will turn out to be the same angleGBD. If the dihe-
dral angles do not coincide (i.e. the faceQ' occupiesthe position
Q\,") then the greater dihedral angle will turn out to have the greaterlinear angle,namely/CBD >/C\"BD.

18 Chapter 1. LINES AND PLANES
38. Converse theorems. (1) Congruent linear anglescor-respondto congruent dihedral angles.
(2) The greater of two linear anglescorrespondsto the
greater dihedral angle.
These theorems are easy to prove by reductio ad absurdurn.
Figure 25
39. Corollaries. (1) Right dihedral angles correspond to rightlinear angles, and vice versa.
Let a dihedral angle PABQ (Figure 26) be right. This meansthat it is congruent to its supplementary angle P'ABQ. But thenthe linearangles CDE and CDE \177are also congruent, and since theyare supplementary,eachof them is right. Conversely, if the sup-plementary linear anglesCDE and CDE' are congruent, then thecorresponding dihedralanglesare congruent, and therefore each ofthem is right.
(2)All right dihedral angles are congruent because they have con-gruent linear angles.
Similarly, one can easily prove that:(3) Vertical dihedral angles are congruent.
(4) Dihedral angles with respectively parallel and similarly (oroppositely) directedfacesare congruent.
(5) For the measure of a dihedral angle, one takes the degree
measure of its linear angle. Thus, a dihedral angle containing n
degrees is congruent to the sum of n unit dihedralangles.Two intersecting planes form two pairs of vertical dihedralangles,
supplementary to each other. The measure of the smallerof thesedihedral angles is used to measure the angle between two planes.
4. Dihedr\177l \177nd some other angles
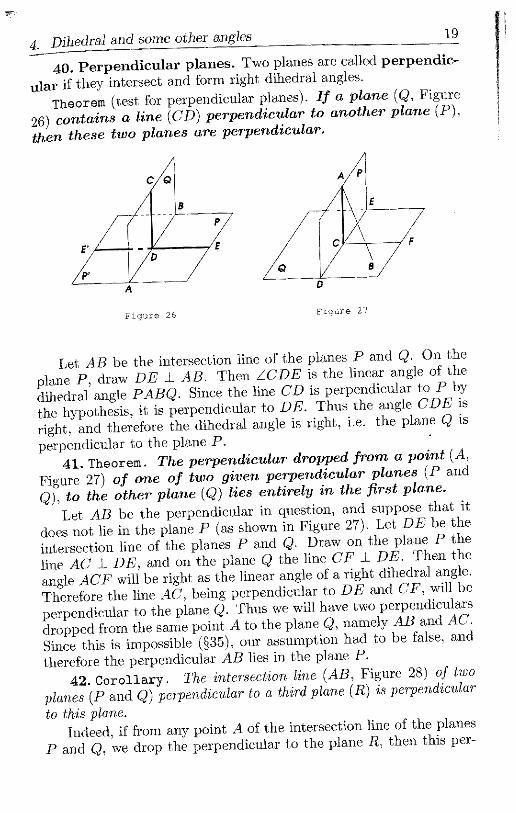
40. Perpendicular planes. Two planesarecalled perpendic-
ular if they intersect and form right dihedral angles.Theorem(test for perpendicular planes). If a plane (Q, Figure
26)contains a line(CD)perpendicularto another plane
then these two planes are perpendicular.
P
A D
Figure 26 Figure 27
Let AS be the intersectionline of the planes P and (\177. On the
plane P, draw DE 2_ AS. Then /CDE is the linear angle of thedihedralangle PASQ. Since the line CD is perpendicularto P by
the hypothesis, it is perpendicular to DE. Thus the angleCDE isright, and therefore the dihedral angle is right, i.e. the plane(\177 is
perpendicular to the plane P.41. Theorem. Theperpendiculardroppedfrom a point
Figure 27) of one of two given perpendicularplanes(P and
Q), to the other plane (Q) lies entirely in the first plane.Let AS be the perpendicular in question, and suppose that it
doesnot lie in the plane P (as shown in Figure 27). Let DE be the
intersection line of the planes P and Q. Draw on the plane P theline AC 2_ DE, and on the plane Q the line CF 2_ DE. Then the
angle ACF will be right as the linear angle of a right dihedralangle.Therefore the line AC, being perpendicular to DE and CF, will be
perpendicular to the plane Q. Thus we will have two perpendiculars
dropped from the same point A to the plane Q, namely AS and AC.Sincethis is impossible(\36535), our assumption had to be false, andthereforethe perpendicularAS liesin the plane P.
42. Corollary. The intersection line (AS, Figure28) of two
planes (P and Q) perpendicular to a third plane (R) is perpendicular
to this plane.
Indeed, if from any point A of the intersection line of the planesP and Q, we drop the perpendicular to the plane R, then this per-

20 Chapter 1. LINES AND PLANES
pendicular will lie, accordingto the previous theorem, in each of theplanes P and Q, and therefore coincide with AB.
Figure 28 Figure 29
43. Angles between skew lines. Given positions and direc-
tions of two skew lines (AB and CD, Figure 29), the angle betweenthem is defined as any angle (MON) obtained by picking an arbi-trary point O in space and drawing from it tWO rays (OM and ON)respectively parallel to th\177 skew lines (AB and CD) and similarlydirectedto them.
The measure of this angle does not dependon the choice of the
point O, for if another such angle M'O'N' is drawn, then ZMON=ZM'O'N'since these angles have respectively parallel and similarlydirectedsides.
Now on, we use the terms angle between lines and perpen-
dicular lines even if the lines do not meet.
44.Orthogonalprojections.As we have discussed in \36525,
when from a given point, the perpendicular and a slant to a given
plane are drawn, then the segmentconnectingthe feet of the per-pendicular and the slant is called the projection of the slant to the
plane. We now give a more general definition of projection.(1) The orthogonal(or Cartesian) projection of a point to
a given plane (e.g. of the point M to the planeP in Figure 30)
is defined as the foot (M') of the perpendicular dropped from thispoint to the plane.
For the sake of brevity we will usually omit the adjective\"or-
thogonal\" and say simply \"projection.\"
(2) The projection of a givenfigure (e.g.a curve) to a given
plane is defined as the geometriclocusofprojectionsofall points ofthis figure.
4. Dihedral and someotherankles 21
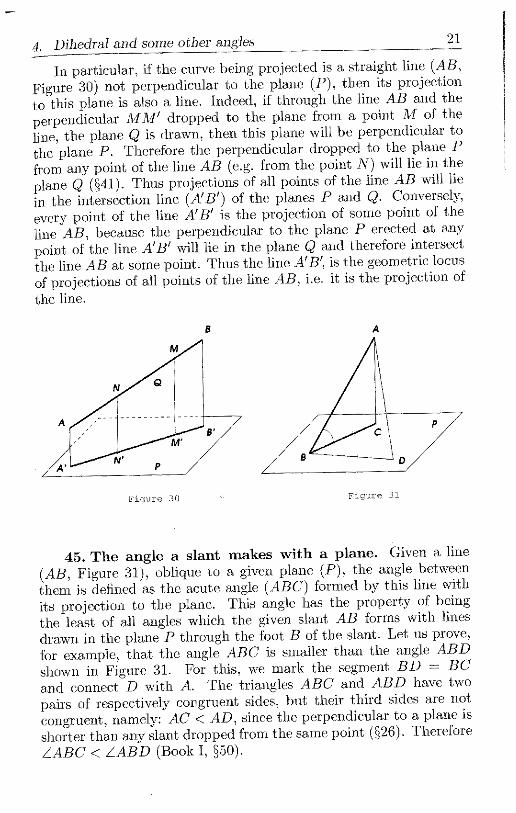
In particular, if the curve being projected is a straight line (AB,
Figure 30) not perpendicular to the plane(P), then its projection
to this plane is also a line. Indeed,if through the line AB and theperpendicular MM' droppedto the plane from a point M of theline\177 the plane Q is drawn, then this planewill be perpendicular to
the plane P. Therefore the perpendiculardroppedto the plane P
from any point of the lineAB (e.g. from the point N) will lie in theplaneQ (\36541). Thus projections of all points of the line AB will lie
in the intersection line (A'B\177) of the planes P and Q. Conversely,every point of the line A'B \177is the projection of some point of theline AB, becausethe perpendicular to the plane P erected at anypoint of the line A\177B ' will lie in the plane Q and thereforeintersectthe line AB at some point. Thus the lineA\177B \177,is the geometric locus
of projections of all points of the line AB, i.e. it is the projectionofthe line.
B
N M
A
Figure 30 \177' Figure 31
45. The angle a slant makes with a plane. Given a line
(AB, Figure 31), oblique to a given plane (P), the angle betweenthem is defined as the acuteangle (ABC) formed by this line withits projectionto the plane. This angle has the property of beingthe leastof all angles which the given slant AB forms with linesdrawn in the plane P through the foot B of the slant.Let us prove,
for example\177 that the angle ABC is smaller than the angle ABDshown in Figure 31. For this, we mark the segmentBD = BCand connect D with A. The triangles ABC and ABD have two
pairs of respectively congruent sides, but their third sidesare not
congruent, namely: AC < AD, since the perpendicularto a plane is
shorter than any slant dropped from the same point (\36526).ThereforeZABC < ZABD (BookI, \36550).
22 Chapter 1. LINES AND PLANES
EXERCISES
29. Provideproofsof the theoremsstatedin \36538.
$0. Prove Corollary 3 in \36539: Vertical dihedral angles are congruent.
$1. Prove that a plane and a line both making right angles with
another line are parallel to each other.
$2. Provethat a line parallel to a given plane makes a right angleto any line perpendicular to the plane.
$$. Prove that in an acute dihedral angle, the sides of any linearangleareprojectionsofeach other to the faces of the angle.34. Finda plane containing a given line and perpendicular to a given
plane.
35. Given a plane P and a linea]]P,find a plane containing the lin\177
a and making a given angle with the planeP.36. Given a plane P and two points A and B on the same side ofit, find a point C on the plane P such that the sum AC + BC is
minimal. ,
$7. Find the greatestamong the dihedral angles between a givenplane and all planescontaining a given slant to it.
$$. Prove that if the intersection points of a line with faces of adihedralangle are the same distance awaY from the edge, then the
angles between the line and the facesare congruent.
\1779. Can four lines in space (not necessarilypassingthrough the same
point) be pairwise perpendicular?
40. Provethat the degreemeasures of angles formed by a given linewith a lineand a plane perpendicular to each other add up to 90\370.
41. Prove that the projection of a parallelogramto a plane is a
parallelogram.
42. Prove that the projectionto a given plane of the barycenter of agiven trianglecoincideswith the barycenter of the projection of thetriangle.45.* In space,four points A, B, C, and D are given such thatAB = AC and DB - DC. Provethat the lines AD and BC are
perpendicular.
44.* Prove that a line making congruent angles with three pairwiseintersecting lines of a plane,is perpendicular to the plane.
45.* Compute the angle betweena line and a plane if the line formsthe anglesof 45\370and 60 \370with two perpendicular lines lying in theplane.

5. Polyhedralangles 23
5 Polyhedral angles
46. Definitions. Take several angles (Figure 32): ASB, BSC,CSD,..., ES/w, which being consecutively adjacent to each other,liein the same plane around a common vertex S. Rotatethe plane of
the angle ASB about the side SB (commonwith the angle BSC) sothat it forms somedihedra]anglewith the plane BSC. Then, keepingthe dihedral angleunchanged, rotate it about the line SO so that theplaneBSC forms some dihedral angle with the plane CSD. Proceedwith such consecutive rotations about each common side. If in theendthe first side SA turns out to coincide with the lastsideSF, then
the geometric figure thus formed (Figure 33) is calleda polyhedralangle.The angles ASB, BSC, ..., ESA arecalledplaneangles,or
faces; their sides SA, SB, ..., SE edges;and their common vertex
S the vertex of the polyhedralangie. Every edge of a polyhedral
angie is at the same time the edge of some dihedral angie formedby two adjacent faces. Thus a polyhedral angie has as many edges,
or dihedral angles, as it has plane angles. The smallest number of
faces a polyhedral angie can have is equalto three, and such angles
are called trihedral. There exist tetrahedral, pentahedral,etc.angles.
D
Figure 32 Figure 33
We will denote a polyhedralangieeitherby a single letter (S)
marking its vertex, or by a string of letters (SABCDE) of which thefirst one denotes the vertex and the others label the edgesin their
consecutive order.
A polyhedral angle is called'convex,if it lies entirely on one sideof the planes of each of its faces. Thus, the polyhedralangleshown

24 Chapter 1. LINES AND PLANES
in Figure 33 is convex.On the contrary, the angle shown in Figure34 is not convex,sinceit is situated on both sides of the plane ASBor of the planeBSG.
Ifwe intersect all faces of a polyhedral angle by a plane, then inthis plane a polygon is formed.In a convex polyhedral angle, such apolygon is also convex.In the sequel, unless the opposite is specified,all polyhedral angles we consider will be assumed convex.
s s
D
A
C
A
Figure 34 \177 Figure 35
47. Theorem. In a trihedral angle, each plane angleissmaller than the sum of the other two plane angles.
In a trihedral angle SABC (Figure 35), let the greatest of theplaneangles be the angle ASC. In the interior of this angle,markthe
angle ASD congruent to XASB, and draw any line AC intersecting
SD at some point D. MarkSB --SDand connect B with A and C.In AABC, we have:
AD + DC < AB + BC.
Thetriangles ASD and ASB are congruent since their anglesat thevertexS are congruent and enclosed between respectively congruentsides, and henceAD = AB. Discarding the congruent summandsAD and AB on each side of the above inequality we concludethatDC < BC.We note now that in the triangles BSC and DSC, two
sides of one of them are respectively congruentto two sides of the
Other, while the third respectivesidesare not congruent. In this case,the angle oppositeto the smaller of these sides is smaller, i.e.
ZCSD < ZCSB.
Adding to the left side of this inequality the angleASD, and to the
right side the angle ASB congruentto XASD, we obtain the required

5. Polyhedral angles 25
inequality:
ZA$C < ZASB
Corollary. Subtracting from both sides of the latter inequalitythe angleASB or the angle CSB, we obtain:
XASC- XASB < XCSBXASC- XCSB< ZASB.
Reading these inequalities from right to left, and also taking intoaccountthat the angleASC, being the greatest of the three planeangles, is alsogreaterthan the difference of the other two, we con-cludethat in a trihedral angle, each plane angle is greaterthan the
difference of the other two plane angles.s
A D
Figure 36
48. Theorem. In a convex polyhedralangle,the sumofallthe plane angles is smaller than 3 4d.
Intersect all the facesof a convex polyhedral angle SABCDE
(Figure 36) by any plane. Then a convex n-gon ABCDE will beformed in the plane of the cross-section.Applying the previous the-
orem to each of the trihedralangleswhose vertices are A, B, C, D,and E, we find:
XABC < XABS + XCBS;ZBCD < XBCS+ XDCSand so on.
Add all these inequalities term-wise. Onthe left hand side, we obtainthe sum of all angles of the polygon ABCDE, which is congruentto 2dn - 4d, and on the right the sum of angles of the triangles
3Recall from Book I, that the measure of a right angle is denoted by d.

26 Chapter 1. LINESAND PLANES
ABS, BCS, and so on, except those angles,which have the vertex
S. Denoting the sum of the latter angles by the letter x, we findafter the summation:
2dn- 4d < 2dn - x.
In the differences2dn- 4d and 2dn - x, the minuends are the same.Thus,in order for the first difference to be smallerthan the second
one, it is necessary that the first subtrahend 4d be greater than thesecond subtrahendx, i.e.4d > x.
49. Symmetric polyhedral angles. As we already know, ver-tical anglesare congruent, as long as they are angles formed by lines
or by planes. Let us find out if this statement still holds true for
polyhedral angles.
Extend all edges of a polyhedral angle SABCDE (Figure 37)
past the vertex S, so that a new polyhedral angle SA'B'C'D'E' isformed, which can be calledverticalto the original one. It is nothard to seethat in these polyhedral angles, all plane angles of as well
as dihedral ones are respectively congruent, but the anglesof eitherkind are positioned in the opposite order. Indeed, if we imagine an
observer who is looking from the exterior of the first polyhedral angleat its vertex, we find that the edges SA, SB, SC, SD, SE of the
first angle will appear to him ordered counter-clockwise.However if
he is looking at the angle SA\177B\177C\177D\177E\177 from its exterior, then theedges SA', SB\177,SC \177,SD \177,SE \177will appear ordered clockwise.
Figure 37
Polyhedral angles whose plane and dihedralangles are respec-
tively congruent but are positioned in the oppositeorder cannot,
generally speaking, be superimposed onto each other, and are there-
fore not congruent. Such polyhedralanglesareoften called symmet-
ric. Symmetry of figures in space will be discussed in more detail inSection 4 of Chapter2.

5. Polyhedr\177l \177n\177le\177 27
50. Theorem (tests for congruence of trihedral angles).Two trihedral anglesare congruentif they have:
(1) a pair of congruent dihedral angles enclosedbetween
two respectively congruent and similarly positioned planeangles, or
(2) a pair of congruent plane angles enclosed between tworespectivelycongruentandsimilarlypositioned dihedral an-
gles.
S S'
A C'
B B'
Figure 38
(1) Let S and S' be two trihedral angles (Figure 38) such that/ASB - /A'S\177B ',/ASC -- /A\177S\177C \177(and these respectively con-
gruent angles are alsopositionedsimilarly), and the dihedral angleAS is congruent to the dihedralangle A'S'. Insert the angle S' intothe angleS so that the vertices S' and S, edges S'A' and SA, and
planes A'S'B' and ASB coincide. Then the edgeS'B' will merge
with SB (since ZA'S'B' = ZASB), the plane A'S'C' will merge
with ASC (since the dihedral angles are congruent), and the edge
S'C' will merge with the edgeSC (since ZA'S'C' = ZASC). Thusall respectiveedgesofthe trihedralangles become superimposed onto
each other, and therefore the anglesare congruent.
(2) The second test is proved similarly by superimposing.
EXERCISES
\1776. Show that every trihedral angle is convex.\1777. Can a non-convex polyhedral angle have the sum of plane anglessmaller than 2d?\1778. Give an example of a non-convex tetrahedral anglewhose sum
of plane angles is: (a) greater than 4d; (b) smaller than 4d; (c) 4d.
\1779. How many of the planes anglesof a convex tetrahedral angle canbe obtuse?

28 Chapter 1. LINESAND PLANES
50. Prove that: if a trihedral angle has two right plane angles then
two of its dihedralanglesare right. Conversely, if a trihedral anglehas two right dihedral anglesthen two of its plane angles are right.51. Provethat every plane angle of a tetrahedral angle is smallerthan the sum of the other three.
52. Can symmetricpolyhedral angles be congruent?
53. Prove that two trihedral anglesare congruent if: (a) all theirplane angles are right,or (b) all their dihedral angles are right.5\177.* Prove that a tetrahedral angle can be intersectedby a plane in
such a way that the crosssectionisa parallelogram.
55. In the interior of a trihedral angle, find the geometric locus ofpoints equidistant from the faces.
56. Suppose that two dihedral angleswith parallel edges have respec-tively perpendicular faces. Provethat eitherthesedihedral angles are
congruent, or their sum is congruentto 2d (i.e.to the sum of two
right dihedral angles).57. Supposethat from a point in the interior of a dihedralangle,perpendicularsare dropl\177ed to its faces. Prove that the anglebetween
the perpendiculars is congruent to the angle supplementaryto the
linear angle.
55. Suppose that edges of one trihedral angleare perpendicular to
the faces of another trihedral angle. Prove that facesof the first
angle are perpendicular to the edges of the second.59.*Prove that in a trihedral angle, the sum of all dihedralanglesis greaterthan 2d, and the sum of each pair of dihedralanglesissmaller than the sum of the third dihedral angleand 2d.60.*Prove that in a (convex) polyhedral angle with \177 faces the sum
of all dihedral angles is greater than 2d\177 - 4d (i.e. than the anglesumof a convex \177-gon).
61.* One of two polyhedral angles with the samevertex lies inside
the other. Prove that the sum of plane anglesof the latter oneisgreater than the sum of plane angles of the former.Doesthis remain
true if one of the polyhedral angles is not required to be convex?Which one?
Chapter 2
POLYHEDRA
I Parallelepipedsand pyramids
51. Polyhedra. \177 A polyhedron is a geometric solid boundedby polygons. The boundary polygons of a polyhedron are calleditsfaces.A common side of two adjacent faces is calledan edge ofthe polyhedron. When several faces meet at their commonvertex,they form a polyhedral angle, and the vertex of the angleis calledavertex of the polyhedron. A straight segment connecting any twovertices, which do not lie in the same face, is called a diagonal ofthe polyhedron.
Thesmallest number of faces a polyhedron can have is four. Such
a polyhedron can be cut out of a trihedralangleby a plane.
We will consider only those polyhedra which are convex,i.e.lieon one side of the plane of each of its faces.
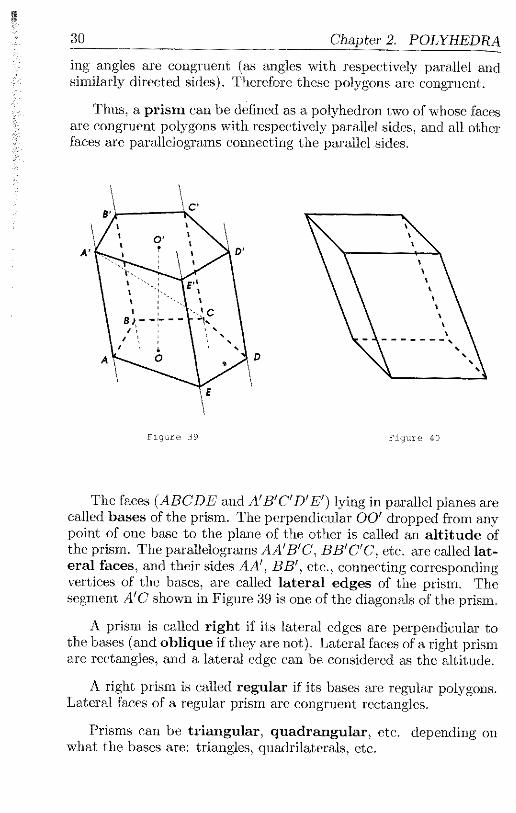
52.Prisms. Take any polygon ABE'DE (Figure 39), andthrough its vertices,draw parallel lines not lying in its plane. Thenon one of the lines,take any point (A f) and draw through it theplaneparallelto the plane ABE'DE, and also draw a plane througheachpair of adjacent parallel lines. All these planes will cut out apolyhedron ABCDEAfB\177C\177D\177E \177called a prism.
The parallel planes ABE'DE and AfB\177C\177D\177E \177are intersected by
the lateral planes along parallellines(\36513), and therefore the quadri-laterals AA\177B\177B, BB\177C\177C, etc. are parallelograms. On the otherhand, in the polygons ABE'DE and A\177B\177C\177D\177E \177,corresponding sides
are congruent (as opposite sides of parallelograms),and correspond-
\177Polyhedra (or polyhedrons) is the plural of polyhedron.
29
30 Chapter 2. POLYHEDRA
ing anglesare congruent (as angles with respectively parallel andsimilarly directedsides).Therefore these polygons are congruent.
Thus, a prism canbe defined as a polyhedron two of whose facesare congruent polygons with respectively parallel sides, and all otherfacesare parallelograms connecting the parallel sides.
B
A
E
D
Figure 39 Figure 40
The faces (ABCDE and A'B'C'D'E') lying in parallel planes arecalled bases of the prism.TheperpendicularOO'droppedfrom any
point of one base to the planeof the otheris called an altitude of
the prism. The parallelogramsAA'B'C,BB'C'C,etc.are called lat-
eral faces, and their sides AA', BB', etc., connecting correspondingvertices of the bases,are called lateral edges of the prism. Thesegment A'C shown in Figure 39 is one of the diagonalsofthe prism.
A prism is called right if its lateral edges are perpendiculartothe bases (and oblique if they are not). Lateral facesofa right prism
are rectangles, and a lateral edge can be considered as the altitude.
A right prism is called regular if its bases are regular polygons.Lateral faces of a regularprismare congruent rectangles.
Prisms can be triangular, quadrangular, etc. dependingonwhat the bases are: triangles, quadrilaterals, etc.

1. parallelepipedsand pyramids 31
53. Parallelepipeds are prisms whose bases are parallelograms(Figure 40). Just like general prisms, parallelepipeds can be right or
oblique. A right parallelepiped is called rectangular 2 if its base isa rectangle (Figure 41). It follows from the definitions that:
(1) All six faces of a parallelepipedare parallelograms;
(2) The four lateral sides of a rightparallelepipedare rectangles,
while its bases are parallelograms;
(3) All six faces of a rectangular parallelepiped are rectangles.Thethree edges of a rectangular parallelepiped meeting at a ver-
tex are called its dimensions; one of them can be considereditslength, another width, and the third height.
A rectangular parallelepiped whose three dimensions are all con-gruentto each other is called a cube. All faces of a cube are squares.
!
D
c
A B
Figure 41 Figure 42
54. Pyramids. A pyramid is a polyhedron, of which one face.(calledits base) can be any polygon, and all other faces (calledlateral) are triangles meeting at a common vertex.
In orderto construct a pyramid, it suffices to take any polyhedralangleS (Figure 42), cut it by a plane ABCD intersectingall theedges,and take the finite part SABCD.
The commonvertexof the lateralfaces is called the vertex, the
edges adjacent to it lateral edgesofthepyramid, and the perpen-
dicular SO, dropped from the vertex to the base, its altitude.A plane drawn through the vertex and any diagonal of the base
(e.g.the diagonal BD, Figure 44) is called a diagonal plane ofthe
2Recte[ngule[r pe[re[llelepipeds are also known as cuboids or boxes.
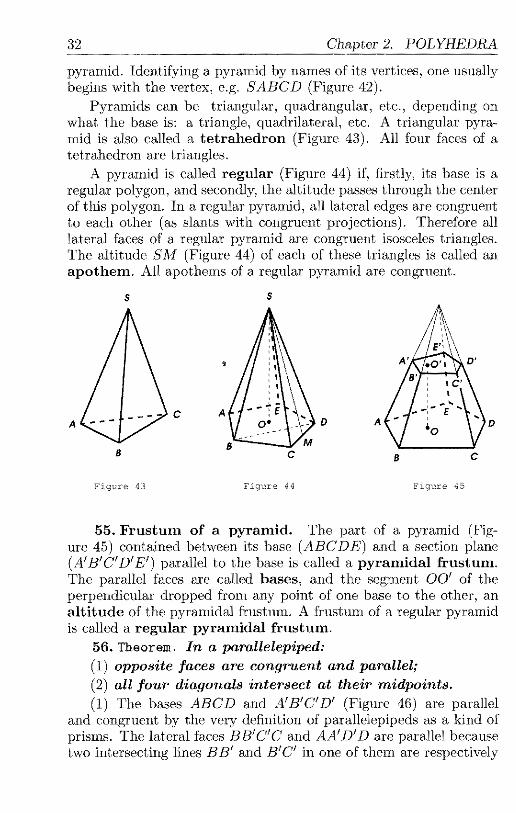
32 Chapter 2. POLYHEDRA
pyramid. Identifying a pyramid by names of its vertices,oneusually
begins with the vertex, e.g. SABCD (Figure 42).Pyramidscanbe triangular, quadrangular, etc., depending on
what the base is: a triangle, quadrilateral, etc. A triangular pyra-mid is also calleda tetrahedron (Figure 43). All four faces of atetrahedron are triangles.
A pyramid is called regular (Figure 44) if, firstly, its base is aregular polygon, and secondly, the altitude passes through the centerof this polygon.In a regular pyramid, all lateral edges are congruentto eachother (as slants with congruent projections). Therefore alllateral facesof a regular pyramid are congruent isosceles triangles.The altitude SM (Figure44) of each of these triangles is called anapothem. All apothems of a regular pyramid are congruent.
s s
cA
B
D A D
B C
Figure 43 Figure 44 Figure 45
55. Frustum of a pyramid. The part of a pyramid (Fig-ure 45) contained betweenits base(ABCDE)and a section plane
(A\177B'C'D\177E \177)parallel to the base is called a pyramidal frustum.The parallel faces are called bases, and the segment OO\177of the
perpendicular dropped from any point of one baseto the other, an
altitude of the pyramidal frustum. A frustum of a regular pyramidis called a regular pyramidal frustum.
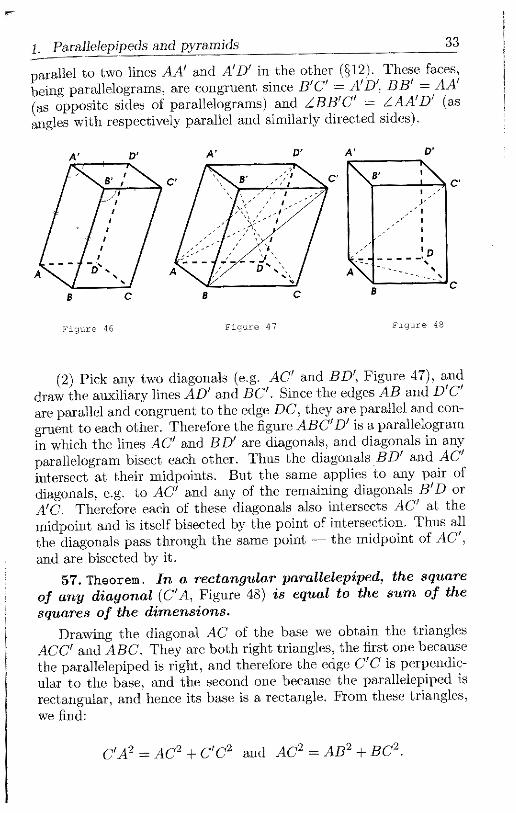
56.Theorem. In a parallelepiped:
(1) opposite faces are congruent and parallel;(2) all four diagonals intersect at their midpoints.(1) The basesABCD and A'B'C'D' (Figure 46) are parallel
and congruentby the very definition of parallelepipeds as a kind ofprisms.The lateral faces BB'C'C and AA'D'D are parallel becausetwo intersecting lines BB' and B'C' in one of them are respectively
1. Parallelepipeds and pyramids 33
parallel to two lines AA' and A\177D \177in the other (\36512).These faces,being parallelograms,are congruent since B\177C\177= A\177D \177,BB \177= AA \177
(as opposite sides of parallelograms) and ZBB\177C \177= ZAA\177D' (asangles with respectivelyparalleland similarly directed sides).
Figure 46 Figure 47 Figure 48
(2) Pick any two diagonals (e.g. AC' and BD', Figure 47), anddraw the auxiliary linesAD' and BC'. Since the edges AB and D'C'are parallel and congruent to the edge DC, they are parallel andcon-gruent to each other. Therefore the figure ABC'D' is a parallelogramin which the lines AC' and BD' are diagonals,and diagonalsin any
parallelogram bisect each other. Thus the diagonals_BD'and AC'intersectat their midpoints. But the same applies to any pair of
diagonals, e.g. to AC' and any of the remaining diagonals B'D orA'C. Thereforeeachof thesediagonals also intersects AC' at the
midpoint and is itselfbisectedby the point of intersection. Thus allthe diagonalspassthrough the same point -- the midpoint ofand are bisectedby it.
57. Theorem. In a rectangular parallelepiped, the squareof any diagonal (C'A, Figure 48) is equal to the sum of thesquaresof the dimensions.
Drawing the diagonal AC of the base we obtain the triangles
ACC' and ABC. They areboth right triangles, the first one becausethe parallelepiped is right, and thereforethe edge C'C is perpendic-ular to the base, and the second one because the parallelepiped isrectangular,and henceitsbaseis a rectangle. From these triangles,we find:
C'A 2 = AC 2+C'C 2 and AC2 = AB 2 + BC 2.

34 Chapter2. POLYHEDRA
Therefore
C\177A 2 = AB 2 + BC 2 + U\177C 2.
Corollary. In a rectangular parallelepiped, all diagonalsarecon-
gruent.
58. Parallel cross sections of pyramids.Theorem.If a \177pyramid (Figure 49) is intersected by a plane
parallel to the base,then:(1)lateraledges and the altitude (SM) are divided by this
plane into proportional parts;
(2) the cross section itselfis a polygon (A\177B\177C\177D\177E \177) sim-
ilar to the base;(3) the areas of the crosssectionand the base are pro-
portional to the squares of the distancesfromthemto the
vertex.
Figure 49 Figure 50
(1) The lines A\177B \177and AB can be considered as intersectionlines of two parallel planes (the base and the cross section) by a
third plane ASB. Therefore A\177B \177AB (\36513). For the same reason,we have: B\177C \177BC, C\177D \177CD, etc., and A\177M \177AM. It follows fromThales' theorem that
SA\177 SB t SC \177 SM \177
A\177A B\177B C\177C M\177M '
(2) From similarity of the trianglesASB and A'SB \177,and then
BSC and B\177SC\177,we derive:
AB BS BS BC AB BC.... and hence -A\177B \177 B\177S ' B\177S B\177C\177 ' A\177B \177 B\177C\177\337

1. Parallelepipeds and pyramids 35
Similarly, we obtain: BC \337B\177C'\177= CD \337C\177D \177,as well as the propor-tionality of all other sidesofthe polygons ABCDE and A\177B\177C\177D\177E \177.
These polygons also have congruent corresponding angles (as angleswith parallel and similarly directed sides), and are thereforesimilar.
(3)Areas of similar polygons are proportional to the squaresofcorrespondingsides(she Book I, \365251). Since
AB AS MS
A\177B \177 A\177S M\177S
(due to similarity of AASM and AA\177SM\177), we conclude that
Area of ABCDE AB2 MS 2
Area of A\177B\177C'\177D\177E \177- (A\177B\177) 2 M\177S2'
Corollary 1. If two pyramids with congruent altitudes are in-tersected by planes at the same distance from the vertices, the areasof the cross sections are proportional to the areas of the bases.
Let a\177 and a2 (Figure 50) be the areas of the basesof two pyra-
mids, h the altitude of each of them, and a\177 and a[ the areas of thecross sectionsparallelto the bases and drawn at the same distanceh\177from the vertices. According to the theorem, we have:
al _ (h')\177 a\177 and hence al = a-!\177,al h 2 a2 a\177 a2
Corollary 2. If a\177 = a2 then a\177 = a\177, i.e. if bases of two
pyramids with congruent altitudes are equivalent 3, then cross sectionsequidistant from the vertices are also equivalent.
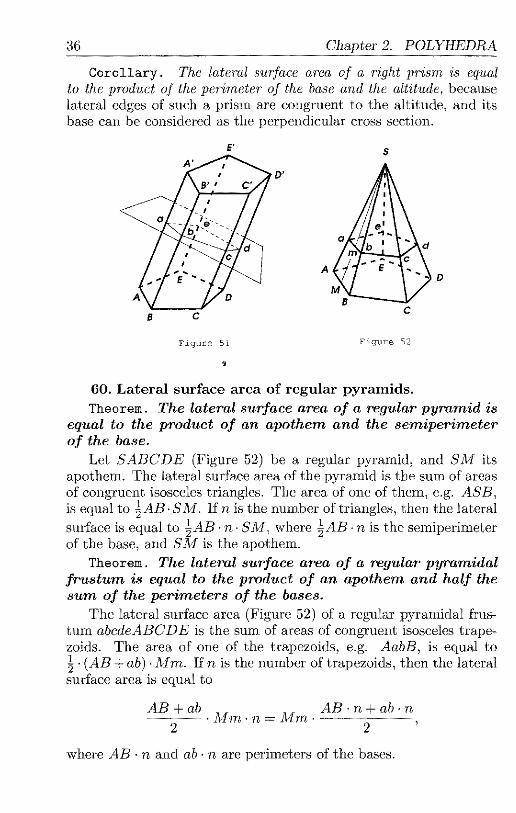
59. Lateral surface area ofprisms.Theorem. The lateral surface area of a prism is equal to
theproductofa lateraledge and the perimeter of a perpen-dicular cross section.
By a perpendicular cross section (Figure 51) of a prism,we
mean the polygon abcde obtained by intersecting all lateral facesofthe prism by a plane perpendicular to the lateraledges.Sidesofthispolygon are perpendicular to the lateral edges (\365\36531, 20).
The lateral surface area of the prismis equalto the sum of areas
of parallelograms. In each of them, a lateral edge can be consideredas the base, andoneofthe sides of the perpendicular cross section asthe altitude.Therefore the lateral surface area is equal to AA \177.ab 4-
B B \177. bc + C C \177. cd + D D \177. de + E E \177. ea = AA \177. ( ab + bc+ cd+ de+ea) .
aRecall that plane figures are called equivalent when they have equal areas.
36 Chapter 2. POLYHEDRA
Corollary. The lateral surface area of a right prism is equal
to the product of the perimeter of the base and the altitude, because
lateral edges of such a prismare congruent to the altitude, and itsbase can be consideredas the perpendicular cross section.
E' S
D'
Figure 51 Figure 52
60. Lateral surface area of regular pyramids.Theorem. The lateral surface area of a regular pyramid is
equalto theproduct of an apethem and the semiperimeterof the base.
Let SABCDE (Figure 52) be a regular pyramid, and SM its
apethem. The lateral surfaceareaofthe pyramid is the sum of areasof congruent isoscelestriangles.Thearea of one of them, e.g. ASB,is equalto \253AB. SM. If n is the number of triangles, then the lateral
\177AB. n is the semiperimetersurface is equalto \253AB. n. SM, where \177
of the base, and SM is the apethem.Theorem.Thelateralsurfacearea of a regular pyramidal
frustum is equal to the productof an apethemand half the
sum of the perimeters of the bases.The lateral surface area (Figure 52) of a regular pyramidal frus-
turn abcdeABCDE is the sum of areas of congruentisoscelestrape-zoids.The area of one of the trapezoids, e.g. AabB, is equal to\177. (AB + ab). Min. If n is the number of trapezoids, then the lateral2surface area is equalto
AB + ab AB \337n + ab. n\337]Vim. n: Mm.
2 2 '
whereAB \337n and ab. n are perimeters of the bases.

1. p\177r\177llelepipeds \177nd pyramids37
EXERCISES
62. Show that in a tetrahedron,or a parallelepiped, each face can
be chosen for its base.63. Compute the angle between diagonals of two adjacent facesofacube.(Considerfirst the diagonals that meet, then skew ones.)6J. Provethat if every face of a polyhedron has an odd number of
sides then the number of the facesis even.65.\177Prove that in every polyhedron all of whose facesare triangles
there is an edge such that all planeanglesadjacentto it are acute.
66. \177Prove that in every tetrahedron, there is a vertexallof whose
plane angles are acute.67. Prove that in a tetrahedron,all faces are congruent if and onlyif all pairs of oppositeedgesare congruent.
68. Find a point equidistant from all faces of a given tetrahedron.69.\177Prove that a polyhedron is convex if and only if every segmentwith the endpoints in the interiorofthe polyhedron lies entirely in
the interior.
70. Prove that faces,crosssections,and projections of convex poly-hedra are convexpolygons.71. Compute the diagonal of the cube with the edge 1 cm.72.Ina cube,which of the two angles is greater: between two diag-
onals, or between a diagonal and an edge?73. Prove that if two diagonals of a rectangular parallelepipedareperpendicular, then its dimensions are congruent .to the sidesof aright triangle, and vice versa.
7\177. Compute the length of a segment if its orthogonal projections tothree pairwise perpendicular planeshave lengths a, b, and c.
75. \177Is a polyhedron necessarily a prism, if two of its faces are con-gruent polygons with respectively parallel sides, and all other facesareparallelograms?(First allow non-convex polyhedra.)
76. \177Prove that if all diagonals in a prism are concurrent (i.e.passthrough the same point), then this prism is a parallelepiped.77. Prove that in a pyramidal frustum with quadrilateral bases,all
diagonals are concurrent, and vice versa, if in a pyramidal frustum,
all diagonals are concurrent, then its basesare quadrilateral.
78. \177Find a parallelepiped three of whose edges lie on three given
lines, of which no two lie in the sameplane.79.Compute the total surface area of a right prismwhose altitude
equals 1 cra, and the base is a right triangle with legs 3 cra and 4 cm.

38 Chapter 2. POLYHEDRA
80. The total surface area of a rectangularparallelepiped is equal
to 1714 m 2, and the dimensionsof the base are 25 m and 14 m.Compute the lateral surfaceareaand the lateral edge.
81. In a rectangular parallelepipedwith a square base and the alti-tude h, a Cross section through two opposite lateral edges is drawn.Computethe total surface area of the parallelepiped, if the area of
the cross section equals S.82. A regular hexagonal pyramid has the altitude h and the sideofthe base a. Compute the lateral edge, apothem, lateralsurfacearea,and total surface area.
85. Compute the total surfaceareaof the tetrahedron all of whoseedges have the same length a.
84{. Compute the angle between lateral facesand the base of a regularpyramid whose lateral surfaceareais twice the area of the base.
85. Prove that if all lateral edges of a pyramid form congruent angles
with the base, then the basecanbe inscribed into a circle.
86. Prove that if all lateral faces of a pyramid form congruent angles
with the base, then the basecanbe circumscribed about a circle.
87. A regular hexagonal pyramid, which has the altitude15cm and
the side of the base 5 cm, is intersectedby a plane parallel to thebase. Compute the distancefrom this plane to the vertex, if the areaof the crosssectionis equal to \177-v/\177 cm 2.
88. The altitude of a regularpyramidal frustum with a square baseis h, and the areas of the bases are a and b. Find the total surface
area of the frustum.
89. The bases of a pyramidal frustum have areas 36 and 16. Thefrustum is intersectedby a plane parallel to the bases and bisectingthe altitude.Compute the area of the cross section.90.* Througheachedge of a cube, draw outside the cube the planemaking 45 \370angles with the adjacent faces. Compute the surfaceareaofthe polyhedron bounded by these planes, assuming that the edgesof the cube have length a. Is this polyhedron a prism?91. Prove that if all altitudes of a tetrahedron are concurrent,then
each pair of opposite edges are perpendicular, and vice versa.
92.* Prove that if one of the altitudesofa tetrahedron passes through
the orthocenter of the opposite face,then the same property holds
true for the other three altitudes.93.*From a point in the interior of a polyhedron,perpendicularstothe planes of the faces are dropped. Prove that the foot of at leastoneof the perpendiculars lies in the interior of the face.
2. Volumes of prisms \177nd pyramids39
2 Volumes of prisms and pyramids
61.Main assumptionsaboutvolumes.A vessel of a cer-
tain shape can hold a certain amount of water. The amount canbe measuredand expressedquantitatively in \"cubic\" units, such ascm3, m3, ft \177, etc. Such measuring of solid shapes leads us to thegeometrictheory of volumes. Our assumptions about volumes ex-presstherefore,'inan idealized form, properties of the water-holdingcapacity of vessels.Namely we will assume that volumes of geomet-ric solidsare expressed by positive numbers, and are defined for all
polyhedra and, more generally, for all solidsthat canbe partitioned
into several polyhedra. Furthermore, we assume that the following
properties hold true.
(1) Congruent solids have equal volumes.
(2) The volume of a solid subdivided into several parts is equal tothe sum of the volumes of these parts.
(3) The volume of the unit cube (i.e. the cubewhose edge is a
unit of length) is equal to i (in the corresponding cubic units).
Two solids that have equal volumes are called equivalent.
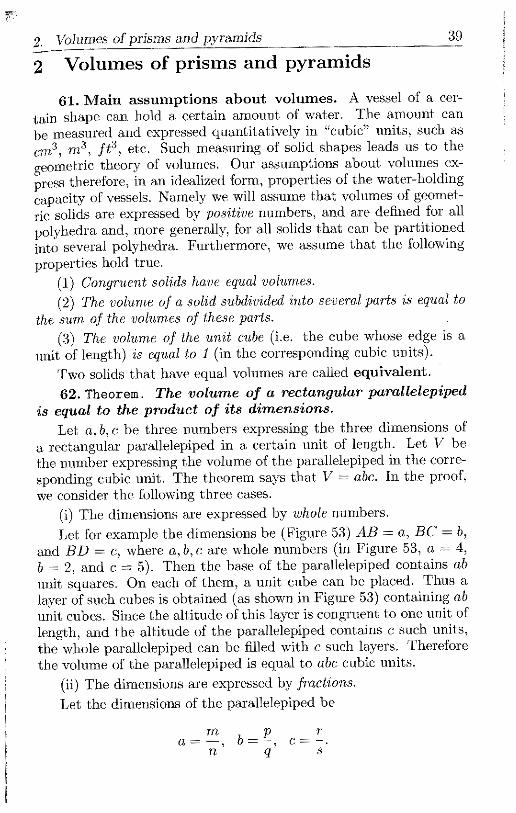
62. Theorem. The volume of a rectangularparallelepipedis equal to the product of its dimensions.
Let a, b, c be three numbers expressing the three dimensionsofa rectangular parallelepiped in a certain unit of length. Let V be
the number expressing the volume of the parallelepipedin the corre-
sponding cubic unit. The theorem says that V - abc. In the proof,we consider the following three cases.
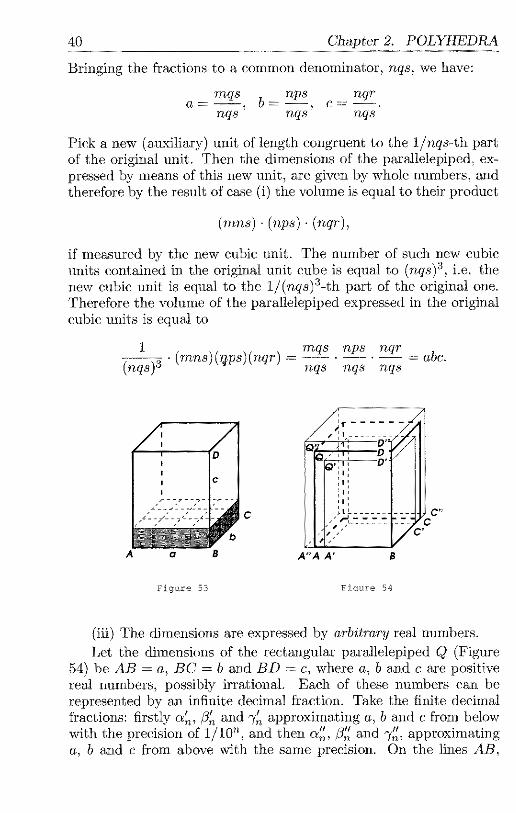
(i) The dimensionsare expressed by whole numbers.
Let for example the dimensionsbe (Figure 53) AB = a, BC = b,and BD = c, where a, b, c are whole numbers (in Figure53,a = 4,b = 2, and c - 5). Then the baseof the parallelepiped contains ab
unit squares. On each of them, a unit cube can be placed. Thus alayer of such cubesis obtained(as shown in Figure 53) containing abunit cubes. Sincethe altitudeofthislayer is congruent to one unit oflength, and the altitudeof the parallelepiped contains c such units,the whole parallelepipedcanbe filled with c such layers. Thereforethe volume of the parallelepipedis equalto abc cubic units.
(ii) The dimensions are expressed by fractions.
Let the dimensions of the parallelepiped be
m p ra = --, b = -, c = -.n q s
40 Chapter 2. POLYHEDRA
Bringing the fractionsto a common denominator, nqs, we have:
mqs npsa = --, b = --, c = \177
nqs nqsnqrnqs
Picka new (auxiliary) unit of length congruent to the 1/nqs-th partof the original unit. Then the dimensions of the parallelepiped,ex-pressedby means of this new unit, are given by whole numbers,and
therefore by the result of case (i) the volume is equal to their product
(qr)
if measured by the new cubic unit. The numberof such new cubic
units contained in the original unit cube is equalto (nqs) 3, i.e. the
new cubic unit is equal to the 1/(nqs)3-thpart of the original one.Therefore the volume of the parallelepipedexpressedin the original
cubic units is equal to
1(nqs) 3
.(mns)(r\177ps)(nqr)=raqs nps nqrnqs nqs nqs
c
,4', D '\177Q,',,; D
'\177.LL.......\177_-_ _-_ _-_-_.
b
A a B A\"A A' B
Figure 53 Figure 54
(iii) The dimensionsare expressedby arbitrary real numbers.
Let the dimensions of the rectangularparallelepipedQ (Figure
54) be AB = a, BC = b and BD - c, where a, b and c are positivereal numbers, possibly irrational. Eachof these numbers can be
represented by an infinite decimal fraction. Take the finite decimal! ! !fractions: firsfly C\177n,/\177,\177and \"/,h approximating a, b and c from below
\177 II II IIwith the precision of 1/10 n and then C\177n,/3 n and \"/n, approximatinga, b and c from above with the same precision. On the lines AB,
2. Volumes of prisms and pyramids 41
' B(7' 3\177 andBG and BD, mark the segments: firstly BA' = ozn, =
BD' ?,\177, and then BA\" \" BC\" \" BD\" \"= = C\177n, =/\177 and = ?:/\177. We will
have:
BA' _< BA _< BA\", BC\" _< BC' _< BC\"', BD' <_ BD <_ BD\".
Next, build two auxiliary rectangular parallelepipeds: one (denotedQ')with the dimensions BA', BC\" and BD', and the other (denoted
Q\") with the dimensions BA\", BC\"'and BD\".Theparallelepiped Q'
will lie in the interior of the parallelepipedQ, and the parallelepiped
Q\" will contain the parallelepiped Q in its interior.According to the result of ease (ii), we will have:
Volume of O' ' \177' ' Volume of O\" \"\177\"\"
Now let us increase n. This means that we approximate a, b and c
with greater and greater precision. As the number n increases in-definitely, the volume of Q' will obviously increase and (remainingbounded from above by the volume of Q) tend to a certain limit.Thislimit will be equal to the product of those limitsto which the
, , ,approximations c\177, 3\177 and % tend, i.e. to abc. On the otherhand,
as n increases indefinitely, the volume of Q\" will decrease and tend,, II IIto the product of those limits to which c\177,\177,3,\177 and ?,h tend, i.e. tothe same numbergbc.We conclude therefore that the volume of theparallelepipedO is equalto the common limit abe, to which the vol-umes of the parallelepipedsQ' (contained in Q) and O\" (containing
Q) tend as n increasesindefinitely.
Corollary. The volume of a rectangular parallelepipedis equal
to the product of the altitude and the area of the base.
Indeed, if a and b denote dimensionsof the base,then the third
dimension c is the altitude, and its productwith the area ab of thebase is equalto the volume abc.
Remark. The ratio of two different cubic units is equal to thethird power of the ratioof thoseunits of length that serve as theedgesof these unit cubes. For instance, the ratio of one cubicmeterto one cubic centimeter is equal to 1003, i.e. 1,000,000. Similarly,
one cubic yard contains 33 = 27 cubicfeet (Figure55).63.Lemma. An oblique prism is equivalent to a right
prism with base congruent to the perpendicular cross sec-tion of the obliqueprismandwith altitude congruent to itslateral edge.
Suppose we are given an oblique prism ABCDEA'B'C'D'E'
(Figure 56). Extend all of its lateraledgesand lateral faces in the
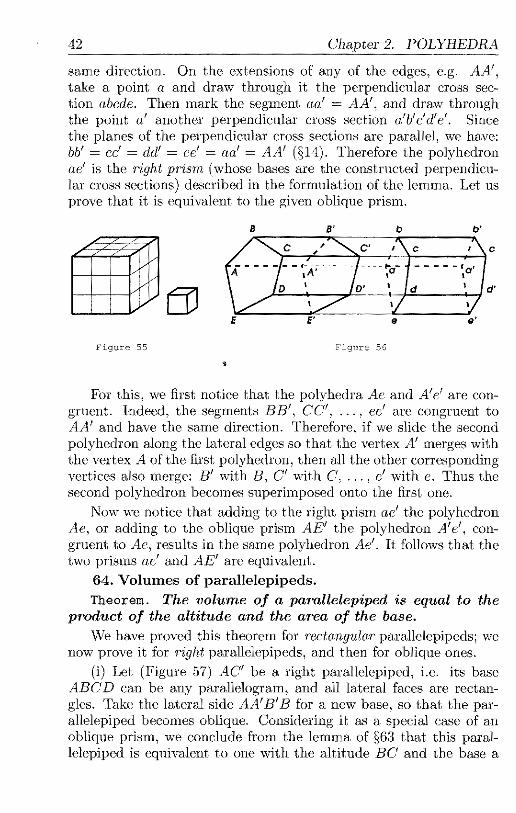
42 Chapter 2. POLYHEDRA
same direction. On the extensions of any of the edges,e.g. AA',
take a point a and draw through it the perpendicularcrosssee-tion abcde. Then mark the segment aa' = AA', and draw through
the point a' another perpendicular cross section a'b'c'd'e'. Since
the planes of the perpendicular cross sections are parallel,we have:
bb' = cc' = dd' = ee' = aa' = AA' (\36514). Therefore the polyhedronae' is the right prism (whose bases are the constructed perpendicu-lar cross sections)describedin the formulation of the lemma. Let usprove that it is equivalent to the given oblique prism.
Figure 55 Figure 56
For this, we first notice that the polyhedraAe and A'e' are con-
gruent. I.ndeed, the segmentsBB', CC', ..., ee' are congruent to
AA' and have the samedirection.Therefore, if we slide the secondpolyhedron along the lateraledgessothat the vertex A' merges withthe vertex A of the first polyhedron, then all the othercorrespondingvertices also merge: B' with B, C' with C, ..., e'with e. Thus the
second polyhedron becomes superimposed ontothe first one.
Now we notice that adding to the right prism ae' the polyhedronAe, or adding to the obliqueprismAE' the polyhedron A'e', con-gruent to Ae, results in the same polyhedron Ae'. It follows that thetwo prisms ae' and AE' are equivalent.
64. Volumes of parallelepipeds.Theorem. The volume of a parallelepiped is equal to the
productof thealtitudeand the area of the base.
We have proved this theoremfor rectangular parallelepipeds; we
now prove it for right parallelepipeds, and then for oblique ones.
(i) Let (Figure 57) AC' be a right parallelepiped, i.e. its baseABCD can be any parallelogram, and all lateral faces are rectan-gles. Takethe lateral side AA'B'B for a new base, so that the par-allelepipedbecomes oblique. Considering it as a special ease of anobliqueprism,we conclude from the lemma of \36563 that this paral-
lelepiped is equivalent to one with the altitude BC and the base a

2. Volumes of prisms and pyramids 43
perpendicular cross sectionPQQ'P'. Thequadrilateral PQQ'P' is arectangle, because its anglesareplane angles of right dihedral angles.Therefore the right parallelepiped,whose base is PQQ'P, must berectangular, and henceits volume equal to the product of its threedimensions:QQ', PQ, and BC. But the product of PQ and BCexpresses the area of the parallelogram ABCD. Thus
Volume of AC' = (Area of ABCD). QQ' = (Area of ABCD).
A' P' D'\177 I
Q'!
B Q C
A' P' D'
\177',', \177 \337
....
A \"'\"-.\177M ,, '*-3B Q C
Figure 57 Figure 58
(ii) Let (Figure 58)AC' be an oblique parallelepiped. It is equiv-alent to sucha right parallelepiped, whose altitude is the edge BC,and base a crosssectionPQQ'P' perpendicular to the edges AD,
BC, etc. But accordingto case (i), the volume of a right paral-lelepipedis equalto the product of the altitude and the area of thebase,i.e.
= \337 PO0 P ).Volume of AC' BC (Area of ' '
If MM' is an altitude of the crosssection ' 'PQQ P, then the area of,PQQ P is equalto PQ. MM',and therefore
Volume of AC' = BC. PQ. MM\177.
But the product BC. PQ expresses the areaof the parallelogram
ABCD.. It remains to show that the segmentMM' is the altitude
of the parallelepiped with respect to the baseABCD.Indeed,the cross section PQQ'P' is perpendicular to the lineBC,
which is therefore perpendicular to any line in the planeof the crosssection,e.g. to MM \177. On the other hand MM', being an altitude
PQQ P, is perpendicular to its base PQ. Thusof the parallelogram ' '

44 Chapter 2. POLYHEDRA
MM' is perpendicular to two intersecting lines (BC and PQ) in theplane ABCD, and thereforeperpendicular to this plane.
Thus, the volume of the parallelepipedAC \177is equal to the prod-uct of its altitude MM\177and the area of the base ABCD.
65. Volumesofprisms.Theorem. The volume of a prism is equal to the product
of thealtitudeand the area of the base.We will prove this for a triangular prism first, and then for an
arbitrary one.
(i) Through a lateral edgeAA \177of a triangular prism ABCA'B\177C\177
(Figure 59), draw the plane parallel to the faceBB\177C\177C, and through
the edge CC \177the plane parallel to the face ABB\177A \177,and then extend
the planes of both bases up to their intersection with the drawnplanes. We obtain the parallelepiped BD \177divided by the diagonalplane ACCRA\177into two triangular prisms, of which the prism AC '
is the given one. Let us prove that theseprisms are equivalent. For
C' E' D'
Figure 59 Figure 60
this, draw a perpendicularcrosssectionabcd. It is a parallelogramwhich is divided by its diagonal ac into two congruent triangles.The given prism is equivalent to a right prism whosealtitudeis the
edge AA' and base the triangle abc. The other triangular prism is
equivalent to a right prism whosealtitudeisAA \177and base the triangleadc. But two right prismswith congruent bases and altitudes canbe superimposedontoeachother, and are therefore congruent. Thusthe prisms ABCA\177B\177C \177and ADCA\177D\177C\177 are equivalent. It followsthat the volume of the given prism is equal to half the volume of
the parallelepiped BD \177. If we denote by V the volume of the givenprism, and by h its altitude, then we find:
V = (Area of ABCD) \337h _ Area of ABCD2 2 .h = (Area of ABC).h.

2. Volumes of prisms and pyramids 45
(ii) Through a lateral edge AA' (Figure 60) of an arbitrary givenprism(Figure60),draw all diagonal planes AA\177C\177C, AA\177D\177D. Then
the given prism becomes divided into severaltriangular prisms. The
sum of the volumes of these prismsis equal to the volume of the
given one. If we denoteby al, a2, a3 the areas of the basesof thesetriangular prisms, by h their common altitude, and by V the volume
of the given prism, then we find:
V = al. h +a2-h +a3' h - (a\177 +a2 +a3)-h = (Area of ABCDE). h.
Corollaries. (1)Comparing with the result of \36563, we conclude
that the ratio of the area of the perpendicularcrosssectionof an
oblique prism to the area of the baseis equal to the ratio of the altitudeto the lateral edge.
(2) If a polygon (abcde in Figure 56) is the orthogonalprojectionofa given polygon (ABCDE), then the area of the projection is equal
to the product of the area of the given polygonand the cosineof the
angle between the planes of these polygons.Indeed, in the oblique prism shown in Figure 56, the ratio of
the altitudeto the lateral edge is the cosine of the anglebetweenthem.Thisangle, and the linear angle of the smaller of the dihedralangles, formed by the base and the perpendicular crosssection,are
congruent as angles with respectively perpendicular sides.66. Cavalieri's principle. An Italian mathematician of the
17th century Bonaventura Cavalie\177i formulated the following propo-sition. If two solids (bounded by -- no matter -- planeor curved
surfaces) can be positioned in such a way that, for each plane parallelto a given plane, the cross sections of these solids by this plane are
equivalent plane figures, then the volumes of these solidsare equal.
Figure 61 Figure 62
To justify Cavalieri's principleoneneeds methods that would go
beyond elementary mathematics. We will merely verify the principlein several special cases.

46 Chapter2. POLYHEDRA
For instance, the hypotheses of Cavalieri's principle are satisfiedwhen two prisms (no matter -- triangular or polygonal) have con-
gruent altitudes and equivalent bases (Figure61). As we already
know, such prisms are equivalent. Onthe otherhand, if such prisms
are placed standing with their baseson the sameplane, then every
plane parallel to the bases and intersectingone of the prismswill
intersect the other as well, and the crosssectionswill be equivalent
(since they are congruent to the respectivebaseswhich are equiva-
lent). Therefore Cavalieri's principle holds true in this special case.
Cavalieri's principle also applies to areas in plane geometry.
Namely, if two figures can bepositionedso that for every line parallelto a given line, its intersectionswith the figures have equal lengths,then the figures are equivalent. Two parallelograms or two triangleswith congruent bases and congruentaltitudes(Figure 62) are goodillustrations of this principle.
The following lemma establishes Cavalicri's principle in the caseof triangular pyramids.
67. Lemma. Triangul\177ar pyramids with congruent altitudesand equivalent bases are equivalent.
Placing the pyramids to stand on the same plane, divide their
common altitude into an arbitrary number n congruent parts (see
Figure 63 where n: 4) and draw through the division point planesparallel to the bases. Since the bases ABC and A\177B\177C \177are equiv-
alent, the triangles formed as crosssectionsof one of the pyramids
are respectively equivalent to the trianglesformedas crosssectionsof the other pyramid (Corollary 2 in \17758). In the interior of eachpyramid, construct now a series of prisms such that: the triangularcrosssectionsare their upper bases, the lateral edges are paralleltothe edgeSA in one of the pyramids and to the edgeS\177A \177in the
other, and the altitude of each of the prismsis congruent to 1/n-th
of the altitude of the pyramids. There will be n- 1 such prisms ineach pyramid. Denotethe volumes of the prisms in the pyramid Sby P\177,P2,... ,Pn-1 in the order from the vertexto the base,and the
volumes of the prisms in the pyramid St by p\177, p\177,..., p[ in the sameorder. Then we have:
/ ! !Pl :Pl, P2:P2, .-., Pn-1 :Pn-1,
because corresponding prisms of each pair have equivalent basesand
congruent altitudes. Hence
I ! !Pl+P2+'\"+Pn-1 =Pl+P2+'\"+

2. Volumes of prisms and pyramids 47
Suppose now that n, i.e. the number of congrhent parts intowhich wedivided the altitude,increases indefinitely. Then both sidesof the latter equality change, remaining equal to each other. Let usprove that each of the sides tends to a limitequalto the volume of
the pyramid into which the prismsareinscribed, i.e. to the volume Vof the pyramid S for the L.H.S., and to the volume V' of the pyramid
S \177for the R.H.S. Then the equality V - V \177of the limits will follow,since an infinite sequence can have at most one limit (Book I, \365228).
$ $'
Figure 63
To prove that the L.H.S.tendsto V as n increases indefinitely,construct in the pyramid S anotherseriesof prisms (situated partly
outside the pyramid) such that: the triangular cross sections are
their lower bases, while the lateralsidesare parallel to SA and thealtitudes are congruentto 1/n-thof the altitude of the pyramid,as before. There will be n such prisms. Denote their volumes by
ql, q2,..., qn in the order from the vertexto the base. It is not hardto see that:
ql -- P\177, q2 -- P2, ..., qn-1 = Pn.
Therefore:
(q\177 + q2 + \"\337 + qn-\177 + qn) - (P\177 + P2 + \"' + Pn-l) = qn.

48 Chapter 2. POLYHEDRA
Since the pyramid S is coveredby the n prisms entirely, we have:
P14- P2 q-'\"q-Pn-l < V < q14-q2 4-\"'q- qn,
and hence
0 < V - + p2 +... + <
As the number n increasesindefinitely, the volume qn of the bottomprism tends to 0 (because its altitude tends to 0 while the baseABCremainsthe same). Thus the difference V - (p\177 q- p2 q- '\" q- Pn-1),remaining positive,tendsto0 as well. By the very definition of limit,this meansthat the sum pl q- P2 4- '\" 4- pn-1 tends to V.
Obviously, the same argumentappliesto any triangular pyramid,l
e.g. to S \177,and we conclude that the sum p\177 q- p\177 4- ... 4- pn_\177 tends
to the volume V \177of the pyramid S( As we have noticed earlier,this
means that V = V \177,i.e. the two pyramids are equivalent.Remark. Theneedfor such an elaborate argument involving lim-
its arisesfrom the fact that two equivalent solids cannot be soeasily
transformed into one another by cutting one into piecesand reassem-
bling them to form the other, as it canbedonewith equivalent poly-
gons in plane geometry. Namely, it turns out thereexist equivalent
tetrahedra (in particular, those with equivalent bases and congru-
ent altitudes) which are not scissors-congruent, i.e. cannot becut into a finite number of respectively congruent polyhedral pieces.Thisimpossibilityresult(which remains true even if adding the sameauxiliary polyhedralpiecesto bothsolidsis allowed before cutting)
was obtained in 1901 by a German mathematicianMax Dehnashis
solution to the so-called Hilbert's 3rd Problem. It was perhaps
the most approachable of the 23 challengingmathematicalproblems
(of which some still remain unsolved) presented by David Hilbert
to the International Congressof Mathematiciansin 1900.
68. Volumes of pyramids.
Theorem. The volume of any pyramid is equal to the prod-uct of the area of thebaseanda thirdof thealtitude.
We first prove this theorem for triangular pyramids, and then for
polygonal.
(i) On the base of a triangularpyramid SABC (Figure 64), con-struct the prism ABCSDEsuch that its altitude is congruent tothe altitude of the pyramid, and one of the lateral edges coincideswith the edgeAS. Let us prove that the volume of the pyramid is
equal to 1/3-rd of the volume of the prism. Forthis, remove the
part of the prism occupied by the pyramid. The remainingpart isthe quadrangular pyramid SBCED with the vertex S and the base

2. Volumes of prisms and pyramids 49
BC'ED. Divide this pyramid by the plane drawn through the vertexS and the diagonalDC of the base into two triangular pyramids.
They have the same vertexS and congruent bases BCD and (5'DElying in the same plane,andaretherefore equivalent according {o thelemma proved above.Compare oneof them, SBCD, with the givenpyramid SABC. Takingthe pointC for the common vertex of thesepyramids, we see that they have bases SAB and SDB, which arecongruentand liein the same plane. Therefore, by the same lemma,thesetwo pyramids are also equivalent. Thus the prism ABCSDEis divided into 3 equivalent pyramids SABC, SBCD, and SCDE.If we denote the volume of the given pyramid by V, the area of thebase ABC by a, and the altitude by h, we find:
Volumeof ABCSDE a. h h
V= \1773 = 3 =a-\177.
S \177 E S
D
A A
B B
Figure 64 Figure 65
(ii) Through any vertex A (Figure 65) of the base of a polygonalpyramid SABCDE, draw all diagonals AC, AD. Then draw section
planes through the edge SA and each of thesediagonals.Theseplanes divide the polygonal pyramid into several triangular ones,which have the same altitude as the given one. Denotethis altitudeby h, and the areas of the bases of these triangular pyramids by
al, a2, a3. Then from part (i) we have:
h h h h h
Volume of SABCDE = al.\177+a2.\177+aa'\177 = (a\177 +a2+aa).\177 = a-\177,
where a = a\177 + a= + aa is the total areaof the base of the given
pyramid.

50 Chapter 2. POLYHEDRA
EXERCISES
94. Compute the volume of a regulartriangularprismwhose lateral
edge is l and the side of the baseis a.95. Express the volume of a rectangular parallelepiped in terms ofthe diagonalsx, y, and z of the faces.
96. Compute the volume of a regular triangular pyramid whose lat-eral edgeis l and the side of the base is a.97.* Computethe volume of a parallelepiped all of whose facesarecongruent rhombi with the side a and an angle60\370.
98. Compute the volume of a pyramid, if lateral edges make theangle 60\370with the plane of the base, which is a right triangle with
the hypotenuse c and an angle30\370.
99. In a pyramid with the altitude h, a plane parallel to the base isdrawn that dissectsthe pyramid into two equivalent parts. Computethe distance of this planefrom the vertex.
100. Compute the volume and lateralsurfaceareaofa regular hexag-
onal pyramid whose alti\177iude has length h and makes the angle 30\370
with the apothem.
101. On the edgesof a trihedral angle SABC, all three of whoseplane anglesare right, the segments SA = a, SB = b, and SC = care marked, and a plane is drawn through the points A, B, and C.Computethe volume of the pyramid SABC.
102. Compute the volumeofa triangularpyramid all of whose lateralfaces are perpendicular to eachother and have areas a 2, b 2, and c2.
103. Compute the volume of a triangular pyramid, if each lateral
edge makes the angle 45\370with the base, whose sides are a, b, and c.
104.* Compute the volume of a triangularprism(possibly oblique)
if the area of one of its lateralfacesis S, and the distance from theplane of this face to the oppositeedge is d.
105.* Compute the volume of a right triangularprismwhose base
has the area 4 cra 2, and the lateral faces 9 cra 2, 10 cra 2, and 18 cra 2.
106. \177Compute the volume of a regular quadrangular pyramid whose
base has the edge a, and whoseplaneangles at the vertex have thesame measure as the anglesbetween lateral edges and the base.
107. A pyramidal frustum whose bases are regular hexagons with
the sides a = 23 cra and b: 17cra respectively, has the volumeV = 1465cra3. Compute the altitude of the frustum.108. Provethat the volume of a pyramidal frustum is equal to thesumof the volumes of three pyramids which have the same altitude
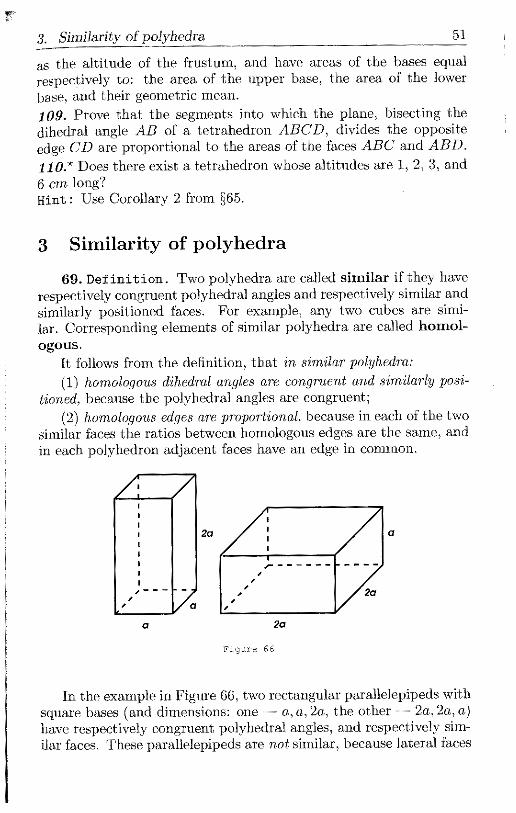
3. Similarity of polyhedr\177 5\177
as the altitude of the frustum, and have areas of the basesequal
respec\177tively to: the area of the upper base, the areaof the lower
base, and their geometric mean.109. Prove that the segments into which the plane, bisecting thedihedral angle _AB of a tetrahedron _ABGD, divides the oppositeedgeGD are proportional to the areas of the faces _AB\177 and _ABD.
110.* Does there exist a tetrahedronwhose altitudes are l, 2, 3, and6 cra long?Hint: Use Corollary 2 from \36565.
3 Similarity of polyhedra
69. Definition. Two polyhedra are called similar if they haverespectivelycongruentpolyhedralanglesand respectively similar and
similarly positioned faces. For example,any two cubes are simi-lar. Corresponding elements of similarpolyhedraare called homol-
ogous.
It follows from the definition,that in similar polyhedra:
(1) homologous dihedral angles are congruentand similarly posi-
tioned, because the polyhedral angles are congruent;
(2) homologous edges are proportional, because in each of the two
similar faces the ratios between homologous edges are the same,and
in each polyhedron adjacent faces have an edge in common.
a 2a
a
Figure 66
In the example in Figure 66, two rectangular parallelepipeds with
square bases (and dimensions: one-- a,a,2a,the other -- 2a, 2a, a)have respectivelycongruentpolyhedral angles, and respectively sim-ilar faces. These parallelepipedsare not similar, because lateral faces
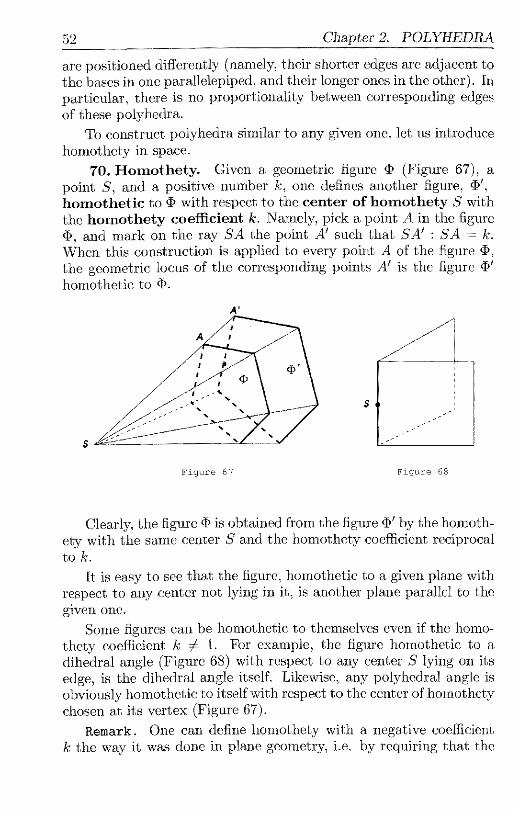
52 Chapter 2. POLYHEDRA
are positioned differently (namely, their shorter edgesareadjacenttothe bases in one parallelepiped, and their longeronesin the other). In
particular, there is no proportionality betweencorrespondingedges
of these polyhedra.
To construct polyhedra similar to any given one, let us introducehomothety in space.
70. Homothety. Given a geometric figure \337 (Figure 67), a
point S, and a positivenumber k, one defines another figure, \177',
homothetic to \337 with respect to the center of homothety S with
the homothety coefficient k. Namely, pick a point A in the figure
\337, and mark on the ray SA the point A ' such that SA \177: SA - k.When this constructionis appliedto every point A of the figure \177,
the geometric locus of the corresponding points A \177is the figure \177
homothetic to \177.
Figure 67 Figure 68
Clearly, the figure \337 is obtained from the figure \177' by the homoth-
ety with the same centerS and the homothety coefficient reciprocalto k.
It is easy to seethat the figure, homothetic to a given plane with
respect to any .center not lying in it, is anotherplaneparallel to the
given one.
Some figures can be homotheticto themselves even if the homo-
thety coefficient k 5\177 1. For example, the figure homothetic to adihedralangle (Figure 68) with respect to any center S lying on its
edge, is the dihedral angle itself. Likewise,any polyhedral angle is
obviously homothetic to itselfwith respectto the center of homothety
chosen at its vertex (Figure67).Remark.One can define homothety with a negative coefficient
k the way it was done in plane geometry, i.e. by requiring that the
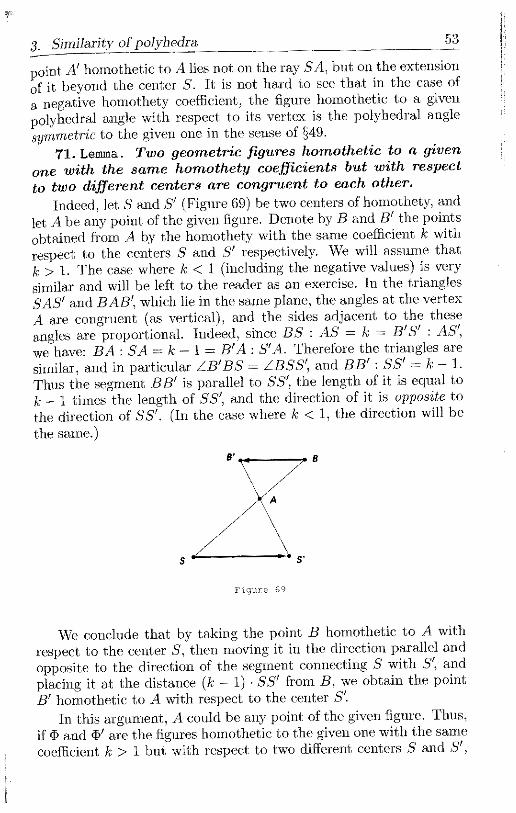
3. Similarity of polyhedra 53
point A' homothetic to A lies not on the ray SA, but on the extensionof it beyond the centerS. It isnot hard to see that in the case ofa negative homothety coefficient,the figure homothetic to a given
polyhedral angle with respect to its vertex is the polyhedral anglesyraraetric to the given one in the sense of \17749.
71. Lemma. Two geometric figures homothetic to a givenone with the same homothety coej\177cients but with respectto two different centersare congruentto each other.
Indeed, let S and S' (Figure69) be two centers of homothety, andlet A be any point of the given figure. Denoteby B and B' the pointsobtained from A by the homothety with the same coe\177cient k with
respect to the centers S and S' respectively. We will assume thatk > 1. The casewhere k < I (including the negative values) is very
similar and will be left to the readeras an exercise. In the trianglesSAS' and BAB', which lie in the same plane, the angles at the vertexA are congruent (as vertical), and the sides adjacentto the theseangles are proportional. Indeed, since BS \337AS - k - B'S \177\337AS',
we have: BA : SA - k - I - B'A : S'A. Therefore the triangles aresimilar, and in particular ZB\177BS = ZBSS \177,and BB' \337SS \177: k - 1.Thus the segment BB \177is parallel to SS', the length of it is equaltok - 1 times the length of SS \177,and the direction of it is opposite tothe directionofSS'. (Inthe case where k < 1, the direction will be
the same.)
\177 -B
$
Figure 69
We conclude that by taking the point B homothetic to A with
respect to the center S, then moving it in the directionparallel and
opposite to the direction of the segmentconnectingS with S \177,and
placing it at the distance (k - 1)\337SS \177from B, we obtain the pointB' homotheticto A with respect to the center S(
In this argument, A could be any point of the givenfigure.Thus,
if (I) and (I)\177are the figures homothetic to the given one with the samecoe\177cient k > 1 but with respect to two different centers S and S \177,

54 Chapter 2. POLYHEDRA
then the figure (k can be superimposed onto the figure \177' by moving
(k as a whole in the direction paralleland oppositeto SS'through
the distance (k - 1) \337SS'. Thus \177 and \177' are congruent.
72. gemark on trans:iat\361ons. The operation of moving all
points of a geometric figure by a given distancein the direction par-
allel to a given segment is a geometrictransformation called trans-
lation. It generalizes to the caseof spacegeometry the concept of
translation on the plane describedin Book I, \177101.
For example, translating a given polygon ABCDE (Figure70)
in a direction not parallel to its plane, we obtain another polygon
A'B'C'D'E', congruent and parallel to the given one. The segments
AA', BB', etc. are parallel,congruent and similarly directed. There-
fore the quadrilaterals AA'B'B, BB'C'C, etc. are parallelograms,
and thus the given and translated polygons are two bases of the
same prism AE'.
Using the conceptof translation, our proof of the lemma canbe summarizedas the following statement about geometric transfor-mations of figures: two \177homotheties with the same coefficient butdifferent centers differ by an appropriate translation.
73. Corollaries. (1) A polyhedral angle homothetic to a givenone with a positive homothety coefficient is congruent to it. Indeed,when the center of homothety is the vertex, the homotheticangle
coincides with the given one; however, according to the lemma,the
choice of another center gives rise to a congruent polyhedral angle.
(2) A polygon homothetic to a given one is similarto it. Indeed,thisis true in plane geometry, i.e. when the center of homothetylies in the plane of the polygon. Therefore this remainstrue for any
center due to the lemma (since polygons congruentto similar ones
are similar).
(3) A polyhedron obtained from a given one by a homothety with
a positive coefficient is similarto it. It is obvious that correspond-
ing elements of homothetic polyhedra are positionedsimilarly with
respect to each other, and it follows from the previous two corol-
laries that the polyhedralanglesof such polyhedra are respectively
congruent and corresponding faces similar.74. Theorem. If two polyhedra are similar, then each of
them is congruentto a polyhedron homothetic to the other.
Since polyhedral anglesat homologousverticesofsimilar polyhe-
dra are congruent, we can superimpose oneof the polyhedral angles
of the first polyhedron onto the homologouspolyhedral angle of the
second. Let SABCDE (Figure 71)be the given polyhedron P, and

3. $imilari\177y of polyhedra 55
let SA'B'C'D'E' be the polyhedron P' similarto it and positioned
in such a way that one pair ofhomologouspolyhedralanglesofbothpolyhedra coincide at the vertex S. Let k be the ratio SA \177: SA of
homologous edges SA and SA\177. We will prove that the polyhedronQ homotheticto P with respect to the center S with the homothetycoefficient k coincides with P\177. For this, note that respective edges ofthe polyhedraQ and P' are congruent, since they are proportionalwith the sanhe coefficient k to the homologous edges of P. Therefore
the endpoints A \177,B \177,C \177,and D' of the edges SA', SB \177,SC \177,and SD' of
the polyhedron P\177 are vertices of the polyhedron Q as well. Conse-quently the polygons SAaB \177,SBiC \177,SCUD \177,and SD\177A \177are common
faces of both polyhedra. Furthermore, sinceallhomologousdihedmlangles of Q and P\177 are congruent, the planes of the faces of Q adja-centto the edgesA\177B \177and B\177C\177coincide with A\177B\177E \177and B\177C\177E \177.
Thus the polyhedral angles of Q and P' with the vertex B \177coincide.
Similarly to the way we compared edgesand facesofthe polyhedra
Q and P\177 adjacent to their common polyhedral angle S, we can now
proceed with their polyhedral angle B '. Forexample, the ray B\177E \177
is an edge of this polyhedral angle in both polyhedra,and since their
respective edges are congruent, the endpointE\177of the edge B\177E \177is
their common vertex. So, we have found that the polyhedraQ and
P' coincide since they have the sanhe vertices. (Should Q and P\177
have more elements than those shown in Figure 71, we could con-
secutively compare their respective faces, edges, and vertices, and
conclude that they all coincide.)
A'\177 D' S B B'
Figure 70 Figure 71
Thus the polyhedronsimilarto the given polyhedron P is con-gruent to the polyhedron Q homothetic to P.

56 Chapter 2. POLYHEDRA
75. Similarity of arbitrary geometric figures. One can give
the following general definition of similarity: two geometric figuresare similar if one of them is congruent to a figure homothetictothe other. The lemma of \36572 shows that the position of the centerof homothety in this definition is irrelevant: when a given figurebecomes congruentto another after application of homothety withone center, it becomescongruentto it after homothety with any othercenter, provided that the coefficient of homothety remains the same.Thus, this definition fully expresses the idea of similarity as \"beingof the sameshape but possibly different scale.\"
To maintain consistencywith the definition of similar polyhedra
given in \36569, we need to assume that the homothety coefficientsin thedefinition of arbitrary similar figures are positive. Then the previous
theorem together with Corollary 3 of \36573 show that two polyhedraare similar in this new sensewhenever they are similar in the oldsense, and vice versa.
76. Theorem. In a pyramid (SABCDE, Figure72), if a cross
section parallel to the base is drawn, then it cuts off anotherpyramid (SA\177B\177C\177D\177E\177f similar to the given one.
According to part (1)ofthe theorem in \36558, the lateral sides ofthe pyramids are proportional. Set k - $A \177\337$A, and apply tothe given pyramid the homothety with the center S and coefficientk. Then the resultingfigure will be a polyhedron with the verticesA \177,B \177,C \177,D \177,E \177,and S, i.e. it will be the pyramid SA\177B\177C\177D\177E( Since
homothetic polyhedra are similar, the theorem follows.77. Theorem.Surfaceareasofsimilarpolyhedra have the
same ratio as the squares of homologousedges.Let A\177, A2,..., An denote the areas of faces of oneof the similar
polyhedra, and a\177, a2,..., an the areas of the homologousfacesof
the other. Let L and I be the lengthsof any two homologous edges.
Then, due to similarity of homologousfacesand proportionality of
homologous edges_,___.wehave:
a\177 l \177 a\177 12 as l \177
A\177 L 2' A2 L 2' '\"' An L 2'
From properties of equal ratios, it follows:
al +a2+...+anA\177 + A2 + .\" + An
12
78. Theorem. Volumes of similar polyhedra have the sameratioas the cubes of homologous edges.

3. Similarity of polyhedra 57
Considerfirst the case of pyramids. Let SABCDE (Figure 72)beone of the given pyramids, L be the lengthofoneofitsedges,e.g.SA, and ! < L be the length of the homologousedgeofthe pyramid
similar to it. On the altitude SO of the given pyramid, take the
point O' such that SO': SO= 1:L, and draw through O' the crosssection parallelto the base. Then the pyramid SA'B'C\"D'E', cut
off by this plane, is homotheticto the first given pyramid with thehomothety coefficient equal to 1:L and is therefore congruent to thesecondgivenpyramid. Let us denote by V and v the volumesof thepyramids SABCDE and SA'B'C\"D'E' respectively, and prove thatv: V: \1773 : Z 3. For this we note that, accordingto the theorem of
\36558, the altitudes of these pyramids are proportional to their lateral
edges, and the bases are similar polygons. Therefore,if a and a'denote the areas of the basesABCDEand A'B'C\"D'E', then
SO' 1 a' 12
SO L' and -r = L2.a
\177 ' SO', we find:Since V = \253a. SO and v = \177a \337
v a' SO' 12 1 13
B C E D
Figure 72 Figure 73
Suppose now that we are given two similar polyhedra with vol-umes V and v respectively, and with a pair of homologousedgesoflengths L and 1. In the interior of the first polyhedron, pick a point
S (Figure 73), connectit with all vertices A, B, C, etc., and draw
planes SAB, SBC, etc. through the point S and each edge of thepolyhedron. Then the planespartitionthe polyhedron into pyramids

58 Chapter 2. POLYHEDRA
SABCF, SBCD, etc.,which have the common vertex S, and whosebasesare faces of the given polyhedron. 4 Let V\177, V2,..., V\177,. be the
volumes of the pyramids. If one appliesthe homothety with the cem
ter S and the coefficientequalto !: L, a polyhedron congruent to thesecond given one is obtained,pm%itioned into pyramids homothetic
to SABCF, SBCD, etc. previously constructed. Let vl,v2,...,v\177
be the respective volumes of these pyramids. Then
V1 \2343' V2 \2343' ''\" Vn- \2343'
and therefore,
v vl q- v2 q- --' -4- vn 13
EXERCISES
111. Prove that two regu\177lar n-gonal pyramids are similar if and onlyif their plane angles at tl\177e vertex are congruent.
112. Find out which regularprismsare similar.
113. Prove that two pyramids are similarif'the baseand a lateral
face of one of them and the baseand a lateral face of the other arerespectivelysimilar,form respectively congruent dihedral angles, andare similarly positioned.114.Thesame --- about two prisms.
115. Show that a figure homothetic to a line (or a plane) with respecttoa center of homothety not lying in it, is a line(respectivelya plane)
parallel to it.
116. Provide the proofof the lemma of \17771 in the case of the homo-thety coefficientk < 1.117. Prove that if one of two figures is congruentto a figure homo-
thetic to the other, then vice versa, the other figure is congruent toa figure homothetic m the first one.
118. Prove that similarpolyhedra of equal volume (or equal surfacearea) are congruent.119.Given a cube with the edge a, find the edge x of another cubewhose volume is twicethe volume of the given one.
4Recall our convention to consider only convex polyhedra. In the caseof non-
convex polyhedra, the theorem holds true, but the partitioning procedure should
begin with dividing into convex polyhedra.
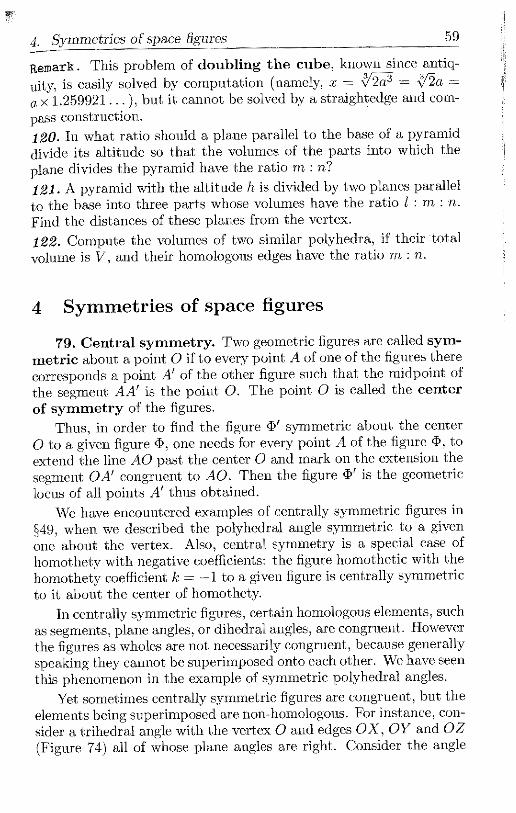
4. Symmetdesofspacefigures59
Remark. This problem of doubling the cube, known since antiq-
uity, is easily solved by computation(namely, x = 32v/\177 = \177/\177a:
a x 1.259921... ), but it cannot be solved by a straight. edge and com-
pass construction.120. In what ratio should a plane parallel to the baseof a pyramid
divide its altitude so that the volumes of the parts into which the
plane divides the pyramid have the ratio m: n?
121. A pyramid with the altitude h is divided by two planes parallel
to the base into three partswhose volumes have the ratio 1: m: n.Findthe distancesof these planes from the vertex.
122. Compute the volumes of two similar polyhedra, if their totalvolume is V, and their homologousedgeshave the ratio m: n.
4 Symmetries of space figures
79.Centralsymmetry. Two geometric figures are called sym-metric abouta pointO if to every point A of one of the figurestherecorrespondsa pointA' of the other figure such that the midpointofthe segmentAA \177is the point O. The point O is calledthe centerof symmetry of the figures.
Thus, in order to find the figure \177 symmetric about the centerO to a givenfigure (I), one needs for every point A of the figure (I), toextend the lineAO past the center O and mark on the extensionthe
segment OA \177congruent to AO. Then the figure (I)\177is the geometric
locus of all points A \177thus obtained.
We have encountered examples of centrally symmetricfigures in
\36549, when we described the polyhedral angle symmetric to a given
one about the vertex. Also, central symmetry is a specialcase of
homothety with negative coefficients: the figure homothetic with thehomothety coefficient ]c = -1 to a givenfigureis centrally symmetricto it about the centerofhomothety.
In centrally symmetric figures, certain homologous elements,suchassegments,plane angles, or dihedral angles, are congruent. Howeverthe figures as wholes are not necessarily congruent, because generallyspeakingthey cannot be superimposed onto each other. We have seen
this phenomenon in the example of symmetric polyhedralangles.Yet sometimes centrally symmetric figures are congruent, but the
elementsbeing superimposed are non-homologous. For instance, con-sider a trihedralangle with the vertex O and edges OX, OY and OZ
(Figure 74) all of whose planeanglesare right. Consider the angle

60 Chapter 2. POLYHEDRA
OX'Y'Z' symmetricto it. Rotating the angle OX\177Y\177Z ' about theline XX \177until the ray OZ \177coincides with the ray OZ, and thenrotatingthe resultingangleabout the lineOZ,we can superimpose
the angle OX\177Y\177Z \177onto OXYZ. However the ray OX \177then merges
with the ray 0\276, and OY \177with OX. However, if we rotate the angleOX\177Y\177Z \177about the line ZZ \177until the rays OX \177and OY \177coincide
with OX and OY respectively, then the rays OZ and OZ \177turn out
to have opposite directions.
z zz z'
X Y X X' , Y' Y
Z' Z'Figure 74
If the geometric figure symmetric to a given one about a certaincenter coincides with the given figure, one says that the given figurehas a centerof symmetry. For example, any parallelepiped has acenter of symmetry, namely the intersection point of the diagonals(\36556).
Figure 75
80. Bilateral symmetry. Two geometric figures are calledsymmetricabout a given plane P, if to every point A of one of
the figures there corresponds a point A \177of the other, such that thesegment AA \177is perpendicular to the plane P and is bisectedby the
intersection point with it. The plane P is calledthe plane of sym-
metry of the figures.

4. Symmetriesofspacefigures 61
In figures symmetric about a plane, correspondingsegments,and
plane or dihedral angles are congruent. For example,if A and B
are any two points of a given figure, and A \177and B \177are the points
symmetric to them about a planeP (Figure 75), then the segmentsAB and A\177B \177are congruent. Indeed, since the lines AA \177and BB \177are
perpendicular to the plane P, they are parallelto each other, and in
particular lie in the same plane,Q, perpendicular to P. Inside thisplane, the points A and B are symmetric, about the line of inter-sectionof the planes P and Q, to the points A \177and B \177respectively
(because AA \177and BB \177are perpendicular to this line and are bisectedby it). Therefore AB = A\177B \177.
As in the case of central symmetry, figures symmetricabout aplane are not necessarily congruent. Examples of symmetric figuresare obtainedby reflecting any object in a mirror: every figure issymmetric to its mirror reflection with respect to the plane of the
mirror.
If a geometric figure coincides with the figure symmetric to itabout a certain plane (or, in other words, can be divided into twoparts symmetricabout this plane), then the figure is said to have aplaneof symmetry, or is symmetric bilaterally.
Bilaterally symmetric objects are frequently found in the house-
hold (e.g. chairs, beds,etc.) and in nature. For instance, the humanbody has a plane of bilateral symmetry dividing it into the left and
right sides. By the way, this provides a convincing example of sym-
metric figures which are not congruent. Namely, the left and righthands are symmetric, but cannotbe superimposed, as it is clear fromthe fact that the sameglove does not fit both hands.
Symmetry about a line. Two figures are called symmetricabout a line ! if to every point A of one of the figures there corre-spondsa pointA \177of the other such that the segment AA \177is per-
pendicular to the line I, intersectsit, and is bisected by the point ofintersection. The line I is calledthe axis of symmetry of the 2ndorder.
It follows from the definition, that if two geometric figures sym-
metric about a line are intersected by any plane perpendicular to
this line (at some point O) then the cross sections of the figures areplanefigures symmetric about the point O.
Furthermore, it follows easily that two solids symmetric about aline can be superimposedby rotating one of them 180 \370 about the
line. Indeed, imagine all possible planesperpendicularto the axis
of symmetry. Each of these planes contains two cross sections sym-

62 Chapter 2. POLYHEDRA
metricabout the point of intersectionof the plane with the axis. Ifone moves the planealong itself by rotating it in space 180\370about
the axis, then the first figure becomes superimposedonto the sec-ond. This holds true for every cross section perpendicular to theaxis. Since simultaneous rotation of all cross sections through theangleof 180\370is equivalent to rotating the whole figure 180\370about
the axis, our statement follows.If a figure, obtained from a given one by rotating 180\370about a
certain line, coincides with the given figure, one says that it has anaxis of symmetry of the 2nd order. The name reflects the fact thatin the processof rotationby 360 \370about an \"axis of symmetry of the2nd order\"the rotatedfigure will occupy its original position twice.
Here are someexamples of solids possessing axes of symmetry ofthe 2ndorder:
(1)A regular pyramid with an even number of lateral faces.Theaxisof symmetry is the altitude.
(2) A rectangular parallelepiped. It has threeaxes of symmetry
of the 2nd order, namely,the linesconnectingthe centersofoppositefaces.
(3) A regular prism. If the number n oflateralfaces is even, then
the prism has n + i axesof symmetry of the 2nd order, namely \253n
lines connecting the midpoints of opposite lateral edges,and \253\177+ 1
lines connecting the centers of oppositefaces,including the bases. If
the number u of lateral faces is odd, then the prism has u axes ofsymmetry of the 2ndorder,namely each line connecting the midpointof a lateraledgeand the center of the opposite lateral face.
81. Relations betweencentral,bilateraland axial sym-
metries.
Theorem. If two figures are symmetric to a givenJ\177gure\177
one about a point (O, Figure 76), the other abouta plane(P)
passing through it\177 then they are symmetric about the lineperpendicular to the planeat this point.
Let A be a point of the given figure, A \177the point symmetric toA about the center O, and A \177the point symmetric to A about theplane P. Denoteby B the intersectlob point of the segmentAA \177
with the plane P. Draw the plane through the points A, A \177and
A \177. This plane is perpendicular to the plane P sinceit contains the
line AA \177perpendicular to this plane. 'In the plane AA\177A \177,draw the
line 1 passing through the point O and parallelto AA\177( This line
is perpendicular to the plane P and to the line BO. Let C be theintersectionpointof the lines A\177A \177and 1.

Symmetries of sp\177ce figures 63
In the triangle AA'A\", the segment BO is the midline parallel toA'A\". But BO 2_ l, and hence A'A\" 2_ 1. Furthermore, since O is themidpoint of the segment AA', and the line 1 is parallelto AA\", we
find that A'C = CA\". We conclude that the points A' and A\" are
symmetric about the line 1. Sincethe same holds true for any pointA of the given figure, we conclude that the geometriclocusofpointsA' symmetric to points of the given figure about the centerO, and
the geometric locus of points symmetric to pointsofthe given figure
about the plane P, are symmetric to eachother about the line 1.
A
C A'
Figure 76
Corollaries. (1) Two figures centrally symmetric to a givenfigure about two different centers are congruent to each other. Thisfollows from the lemma of \36571, since figures centrally symmetric tothe given one are homotheticto it with respect to two different cen-ters and the samecoefficient k = -1.
(2) Two figures symmetric to a given figure about two different
planes are congruent to each other.Indeed,replace each figure, sym-
metric to the given one about a plane, by a congruent figure, namelyby the figure symmetric to the given one about a center lying on theplaneof symmetry. Then the problem reduces to the previous oneabout figures symmetric to the given one about different centers.
82. Axes of symmetry of higher orders. If a figure possesses
an axis of symmetry of the 2ndorder,it issuperimposed onto itself by
the rotation about this axis through the angle of 180 \370. It is possible
however that a figure is superimposedonto itselfafter the rotation
about a line through a certainanglesmallerthan 180 \370. Thus in the
process of rotating the figure about this line,it occupiesits original
position several times. The number of times this happens(including
the original position) is called the order of symmetry, and the line
is called an axis of symmetry of higher order. For example, while
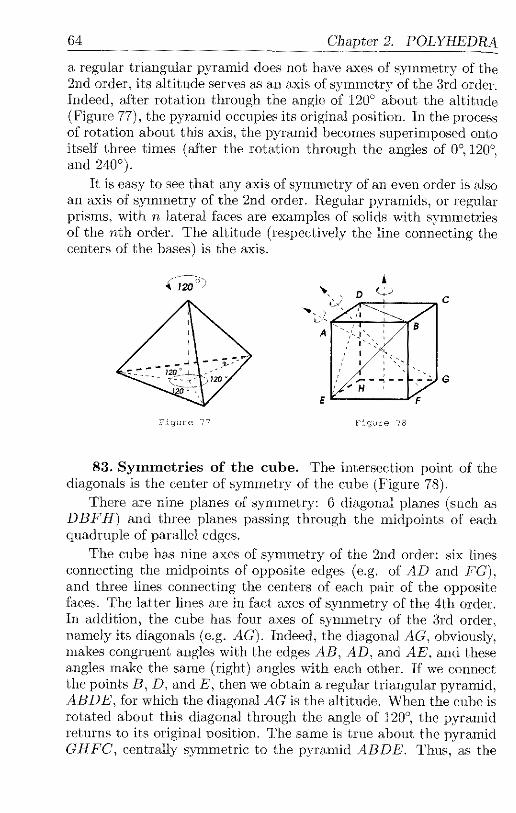
64 Chapter 2. POLYHEDRA
a regulartriangular pyramid does not have axes of symmetry of the2nd order,its altitude serves as an axis of symmetry of the 3rd order.
Indeed, after rotation through the angleof 120\370about the altitude
(Figure 77), the pyramid occupiesits originalposition.In the process
of rotation about this axis, the pyramid becomes superimposed onto
itself three times (after the rotationthrough the angles of 0 \370,120 \370,
and 240\370).
It is easy to see that any axis of symmetry of an even order is alsoan axisof symmetry of the 2nd order. Regular pyramids, or regularprisms,with n lateral faces are examples of solids with symmetries
of the nth order. The altitude (respectivelythe line connectingthecentersof the bases) is the axis.
Figure 77 Figure 78
83. Symmetries of the cube. The intersection point of the
diagonals is the center of symmetry of the cube (Figure 78).
There are nine planesof symmetry: 6 diagonal planes (such asDBFH) and three planespassing through the midpoints of eachquadruple of parallel edges.
The cube has nine axes of symmetry of the 2nd order: six lines
connecting the midpoints of opposite edges (e.g. of AD and FG),
and three lines connecting the centersof eachpair of the opposite
faces. The latter lines are in fact axes of symmetry of the 4th order.In addition,the cube has four axes of symmetry of the 3rd order,namely its diagonals (e.g. AG). Indeed, the diagonal AG, obviously,
makes congruent angles with the edges AB, AD, and AE, and theseangles make the same (right) angles with each other. If we connect
the points B, D, and E, then we obtain a regular triangular pyramid,ABDE, for which the diagonal AG is the altitude. When the cube is
rotated about this diagonal throughthe angleof 120\370, the pyramid
returns to its original position.Thesame is true about the pyramidGHFC, centrally symmetric to the pyramid ABDE. Thus, as the

4. Symmetries ofspacefigures 65
result of this rotation, the wholecubereturnsto itsoriginal position.
It is not hard to see that the cubedoesnot have any other axes ofsymmetry.
Let us find out now, how many different ways of rotating the cubeare there that preserve it as a whole. An axis of symmetry of the 2ndorder gives only one such way (excluding the trivial rotation through0\370). An axis of symmetry of the 3rd order gives two such ways, andof the 4th order three. Since the cube has six axes of symmetry ofthe 2nd order, four of the 3rd order, and three of the 4th order, we
find that there are 6 x 1 d- 4 x 2 d- 3 x 3 = 23 ways, excluding the
trivial one, to superimpose the cubeonto itselfby rotation.
It is not hard to see directly that all the 23 rotations are different
from each other (e.g. by noting that some of the vertices A, B, C,etc. change their positions differently). Together with the trivialrotation (leavingthe positionofeach vertex unchanged) they give 24ways of superimposing the cubeontoitself.
EXERCISES
123.Prove that the figure centrally symmetric to a line(ora plane),
is a line (respectively a plane).12,{. The same-- for symmetry about a plane.
125. Prove that the figure symmetric to a dihedral angle about anyplane is congruentto it.126.Determine centers, axes, and planes of symmetry of the figureformed by a given line intersecting a given plane, but not perpendic-ular to it.
127. Determine centers, axes, and planesof symmetry for the figure
consisting of two intersecting lines.128.*Prove that a prism has a center of symmetry if and only if itsbase does.
129. Determinethe number of planes of symmetry of a regular prismwith n lateral faces.
130. Determine the numberofplanesofsymmetry of a regular pyra-mid with n lateralfaces.131.Let three figures (I), (I)\177,and (I)\" be symmetric: (I)and (I)\177about a
plane P, and (I)\177and (I)\177 about a plane (\177 perpendicular to P. Provethat \1772and \1772\177are symmetric about the intersection line of P and (\177.
132. What can be said about the figures (I) and (I)\177 of the previous
problem if the planes P and Q makethe angle:(a) 60\3707 (b) 45\3707
66 Chapter 2. POLYHEDRA
133.* Prove that if a figure has two symmetry planes making anangle 180\370/n, then their intersection line is an axis of symmetry of
the nth order.
154. Describe the crosssectionofa cube by the plane perpendicularto one of the diagonalsat its midpoint.135.*Show that the 24 ways of superimposing the cubeonto itselfcorrespondto24different ways (including the trivial one) of permut-ing its four diagonals.
5 Regular polyhedra
84. Definition. Let us call a polyhedral angle regular if allof its plane anglesare congruent and all of its dihedral angles arecongruent.A polyhedron is called regular if all of its facesare con-
gruent regular polygons, and all of its polyhedralanglesare regular
and congruent. Thus a cube is a regular polyhedron. It follows
from the definition, that \177in a regular polyhedron: all plane anglesare congruent,all dihedral angles are congruent, and all edges arecongruent.
85.Classificationofregularpolyhedra.Let us take into ac-count that a convexpolyhedral angle has at least three plane angles,and that their sum has to be smaller than 4d (\36548).
\177-dSince in a regular triangle, every angle is 3 , repeating it 3, 4, or
5 times, we obtain the anglesum smallerthan 4d, but repeating it6 or more times, we get the angle sum equal to or greater than 4d.
Therefore convex polyhedral angles whose facesare anglesofregulartrianglescan be of only three types: trihedral, tetrahedral, or pen-tahedral.Angles of squares and regular pentagons are respectivelydand \177d. Repeating these angles three times, we get the sumssmallerthan 4d, but repeating them four or more times, we get the sums
equal to or greater than 4d. Thereforefrom angles of squares orregular pentagons, only trihedral convexanglescanbe formed. The
4d and of reg\177ular withangles of regular hexagons are 3 , polygons morethan 6 sides even greater. The sumof thre\177 or more of such angleswill be equal to or greater than 4d. Therefore no convex polyhedralangles can be formed from such angles.
It follows that only the following five types of regular polyhedracan occur: thosewhose faces are regular triangles, meeting by three,four or five triangles at each vertex, or those whose faces are either
squares, or regular pentagons, meetingby three faces at each vertex.

5. Regular polyhedr\177 67
Regular polyhedra of each of the five types do exist and are oftencalledPlatonic solidsafter the Greek philosopher Plato. They are:
(i) regular tetrahedron whose surface is formed by 4 regulartriangles (Figure79);
(ii) octahedron whose surface is formed by 8 regulartriangles(Figure 80);
(iii) icosahedron whose surface is formed by 20 regular triangles
(Figure 81);(iv) cube (or hexahedron) whose surface consists of 6 squares
(Figure 82);(v) dodecahedron whose surface is formed by 12 regular pen-
tagons(Figure83).
Figure 79 Figure 80 Figure 81
Figure 82 Figure 83
86. Constructions of Platonic solids. The above argument
shows that regular polyhedra, if they exist, fall into five types, butit does not prove that regularpolyhedra of each of the five typesexist. In orderto establish their existence it suffices to point out aconstructionof eachof the five Platonic solids. In the case of thecube,which was defined as a rectangular parallelepiped all of whose

68 Chapter 2. POLYHEDRA
three dimensions are congruent, such a constructionisfamiliar to us.
We will show here how each of the remaining four Platonic solids canbe constructedfrom a cube.
A regular ietmheclror\177 can be constructed by taking four of theeightverticesof a cube for the vertices of the tetrahedronas shown
in Figure 84. Namely, pick any vertex A of the cube, and in the threesquare facesadjacentto this vertex, take the vertices B, C, and Doppositeto A. The six edges connecting the vertices A, B, C,D pair-
wise are diagonals of the cube's faces (onediagonalin each face), and
are therefore congruent. This showsthat all facesof the tetrahedron
are congruent regular triangles. Rotating the cube 120\370about any
of its diagonals (e.g the diagonalpassingthrough the vertex A) willkeep one of the vertices(A) of the tetrahedron in its place, but cycli-cally permute the edges, adjacent to it, and the otherthree vertices
(e.g. move B into C, C into D, and D into B). The correspondingpolyhedral angles becomesuperimposedontoeach other (the angle
B onto the angle C, etc.) Thisshows that all polyhedral angles ofthe tetrahedron are congruent, and all dihedral angles (in each of
them) are congruent. Thlm the tetrahedron is a regularpolyhedron.
D
A
Figure 84 Figure 85
A regular octahedron can be constructedby taking the six' centers
of cube's faces (Figure85) for the vertices. Each edge of the resultingpolyhedronconnectscenters of two adjacent faces of the cube and,as easily computed, has the length \1772 a where a denotes the cube'sdimension. In particular,all edges have the same length, and henceall facesof the octahedronare congruent regular triangles. To provethat all dihedral and all polyhedral angles of the octahedron arecongruent, wenotethat by rotating the cube (say, about axes passingthroughcentersofoppositefaces) one can move any face (e.g. P) of

5. Regular polyhedra 69
the cube onto any other (e.g. (\177). Since the rotation preserves thecube, it also preservesthe setofeight centers of the faces. Thereforethe rotation preservesthe octahedronasa whole, but moves the edges
(CA to C*/\177) and vertices (A to B). Thus the correspondingdihedraland polyhedral angles of the octahedron become superimposed.
A dod\275cahcdro\177 can be constructed by drawing 12 planes, onethrough each of the 12 edges of a cube(Figure86),and choosing the
slopes of these planes in such a way that the resulting polyhedron isregular. The fact that it is possibleto achieve this is not obvious atall, and proving it will require some preparation.
Let us begin with examininga regular pentagon. All of its di-agonals are congruent,and can be assumed to have the same lengthas the dimension of the cube. The angles of the pentagoncontain108\370each. If we place two copies of the pentagonin one plane so that
they have an edge in common,the anglesat the commonvertices will
add up to 216 \370which is smaller by 144 \370than the full angle. There-fore we can rotate the two pentagons in space about their commonedge (AB, Figure 87), so that their planes form a dihedral angle,
until the angle OAF decreasesfrom 144 \370to 108 \370. Since the figure
formed by the two regular pentagonsin space is symmetric aboutthe plane perpendicular to the edgeAB at the midpoint, the an-gle DBE symmetric to the angleCAF will also contain 108 \370. This
means that two more regular pentagons congruentto the original
ones can be attached, one to the edgesFA and AC (shown in Figure87 as GCAFH), the otherto the edges EB and BD. If we nowdraw the diagonalsC'D,DE,EF, and FC' in these pentagons, theywill form a square. Indeed,C'D[[EF(since these diagonals are par-allel to the commonsideAB of the pentagons) and thus C'DEF isa rhombus,and XFC'D - XEDC' (as angles symmetricabout theplaneperpendicularto the line AB at the midpoint).
Let us now examine the tent-like polyhedron ABC'DEF shadedin Figure 87. Fromthe vertex A, drop the perpendicular AO to itsbaseC'DEF,then draw two slams: AM and AN perpendicular re-spectively to CD and FC, and finally draw their projectionsOMand ON to the base. Then, by the theoremof the threeperpen-diculars (\36528), OM _1_ C'D, ON 2_ FC', and therefore XAMO andXANO are linearanglesof the dihedralangles formed by the baseC'DEF with the lateral facesC'ABDand AFC' respectively.
Since the base of the tent-like polyhedron is a square, we canattach polyhedra congruentto it, to each of the faces of the cube asshown in Figure 86. We claim that in the resultingpolyhedron, the
faces (triangles and quadrilaterals) of the attachedtent-linepolyhe-

70 Chapter 2. POLYHEDRA
dra will agree in their slopesand thus form regular pentagons.
In order to show that the slopesagree, it suiTices to check thatthe dihedral angleformedby the lateral face ABCD and the baseCDEF is congruent to the dihedral angle formed by the extension_FHG\177 of the triangle FA\177 and the face P of the cube adjacenttothe base \177DEB. Since the plane P is perpendicularto the base,
it suiTices to check instead that the dihedralangles, formed by the
faces ABeD and FAC with the same plane \177DEF, add up to90\370, i.e. that ZAMO + ZANO = 90\370. For this, we will computecos(ZAMO) - OM : AM and cos(ZANO) = ON: AN, and showthat they are legs of a right triangle with the hypotenuse equal to 1:
d-
Note that XACM = 72\370, and XACN = 36 \370, so we have:
OM = NC = AC. cos36\370,
ON = MC = A,C . cos 72\370,
AM - AC . sin 72\370,
AN = AC . sin 36\370.
As we found in Book I, \365223, in an isosceles triangle with the angleat the vertex36\370(and hence the angles 72 \370at the base), the ratio ofthe base to the lateral side is equal to the golden mean (v/\177- 1)/2.
From the geometry of this triangle, we find:
cos72\370 \177 - 1 cos 36\370= 1 - 2 cos 2 72 \370 v/\177 + 14 4
/
Using the identity cos 2 c\177+ sin 2 c\177= 1, we compute:
cos 2 72 \370=
cos 2 36 \370=
3-V\177 sin272 o_ 5+v\177
3 + v/\177 sin2 36 o = 5 -8 ' 8
Therefore
OM 2 2
AN) =
cos 2 36 \370 cos 2 72 \370
+sin 2 72 \370 sin 2 36 \370
(3 d- v/\177)(5 - v/\177) + (3 - x/\177)(5 d-
+
+ + -20 20
--1.
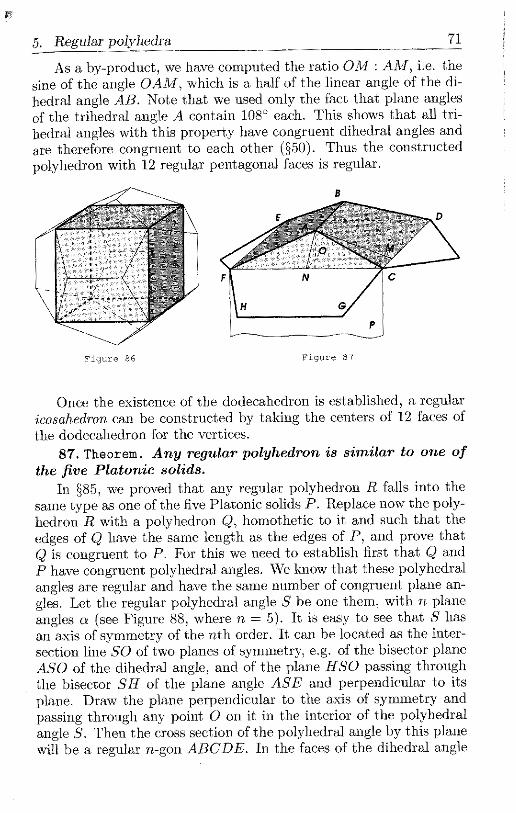
5. Regular polyhedra 71
As a by-product, we have computed the ratioOR//: AA//, i.e. the
sine of the angle OAM, which is a half of the linear angle of the di-hedralangleAB. Notethat we used only the fact that plane anglesof the trihedral angle A contain 108\370each. This shows that all tri-hedral angleswith this property have congruent dihedral angles andare thereforecongruent to each other (\36550).Thus the constructedpolyhedron with 12regularpentagonal faces is regular.
\234 D
Figure 86 Figure 87
Once the existence of the dodecahedronis established,a regular
icosahedron can be constructed by taking the centersof 12 faces of
the dodecahedron for the vertices.$?. Theorem.Any regular polyhedron is similar to one of
the five Platonic solids.In \36585, we proved that any regular polyhedron R falls into the
sametype as one of the five Platonic solidsP. Replacenow the poly-
hedron R with a polyhedron Q, homotheticto it and such that the
edges of Q have the same length as the edges of P, and prove thatQ is congruent to P. For this we need to establishfirst that Q and
P have congruent polyhedral angles.We know that these polyhedralangles are regular and have the samenumber of congruent plane an-gles. Let the regularpolyhedralangleS be onethem, with n plane
angles c\177(see Figure 88, where n = 5). It is easy to see that S hasan axis of symmetry of the nth order. \177It can be located as the inter-section lineSOoftwo planes of symmetry, e.g. of the bisector planeASO of the dihedral angle, and of the planeHSO passing through
the bisector SH of the plane angleASE and perpendicular to its
plane. Draw the plane perpendicularto the axis of symmetry and
passing through any point O on it in the interior of the polyhedralangle S. Thenthe crosssectionofthe polyhedral angle by this planewill be a regular n-gonABCDE.In the faces of the dihedral angle
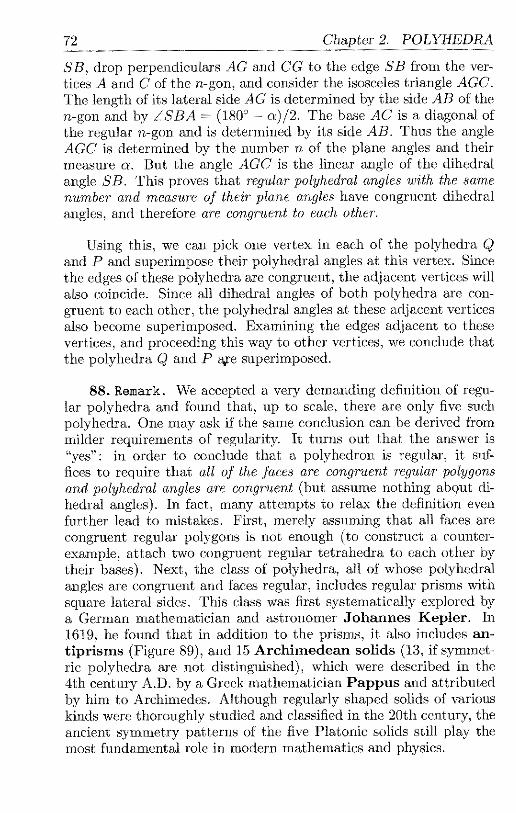
72 Chapter 2. POLYHEDRA
SB, drop perpendiculars AG and CG to the edgeSB from the ver-
tices A and C of the n-gon,and consider the isosceles triangle AGC.The length of its lateralsideAG is determined by the side AB of then-gonand by ZSBA = (180 \370- c\177)/2. The base AC is a diagonal ofthe regularn-gon and is determined by its side AB. Thus the angieAGC is determined by the number n of the planeanglesand theirmeasurec\177. But the angle AGC is the linear angleof the dihedral
angle SB. This proves that regular polyhedralangleswith the same
number and measure of their plane angleshave congruent dihedral
angles, and therefore are congruent to eachother.
Using this, we can pick one vertex in each of the polyhedraQand P and superimpose their polyhedral angles at this vertex. Sincethe edgesofthese polyhedra are congruent, the adjacent vertices willalso coincide.Sinceall dihedral angles of both polyhedra are con-gruent to eachother,the polyhedral angles at these adjacent verticesalso becomesuperimposed.Examining the edges adjacent to thesevertices, and proceedingthis way to other vertices, we conclude thatthe polyhedraQ and P \177e superimposed.
88. Remark. We accepted a very demanding definition of regu-lar polyhedra and found that, up to scale, there are only five such
polyhedra. One may ask if the same conclusion can be derived from
milder requirements of regularity. It turns out that the answer is
\"yes\": in order to conclude that a polyhedron is regular, it suf-fices to require that all of the faces are congruent regular polygonsand polyhedralanglesare congruent (but assume nothing abo\177t di-
hedral angles). In fact, many attempts to relaxthe definition even
further lead to mistakes. First, merely assumingthat all faces are
congruent regular polygons is not enough (to constructa counter-
example, attach two congruent regular tetrahedra to eachotherby
their bases). Next, the class of polyhedra, all of whose polyhedral
angles are congruent and faces regular, includesregularprisms with
square lateral sides. This class was first systematically explored by
a German mathematician and astronomerJohannes Kepler. In1619,he found that in addition to the prisms, it also includesan-tiprisms(Figure 89), and 15 Archimedean solids (13, if symmet-ric polyhedraare not distinguished), which were described in the4th century A.D.by a Greek mathematician Pappus and attributedby him to Archimedes.Although regularly shaped solids of variouskinds were thoroughly studiedand classifiedin the 20th century, theancient symmetry patterns of the five Platonic solids still play themost fundamental role in modern mathematics and physics.
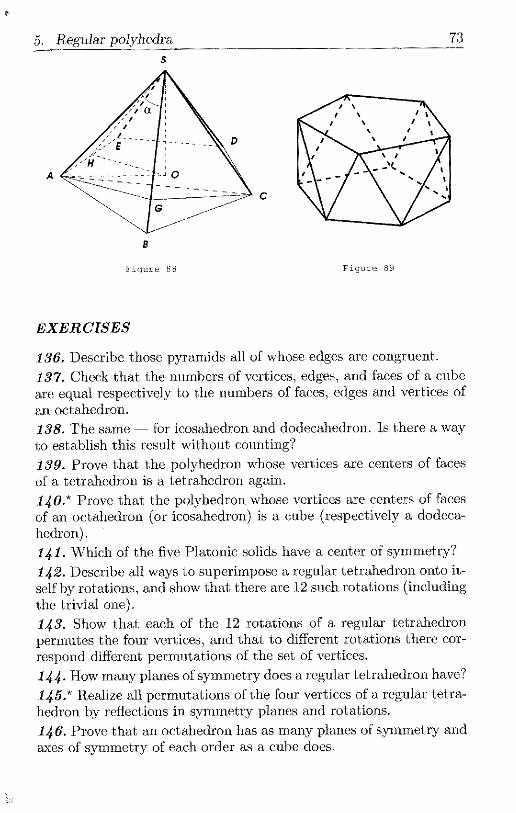
5. Regular polyhedr\177 73
Figure 88 Figure 89
EXERCISES
136. Describe those pyramids all of whose edges are congruent.137. Checkthat the numbers of vertices, edges, and faces of a cubeareequal respectively to the numbers of faces, edges and verticesofan octahedron.
138. The same -- for icosahedron and dodecahedron. Is there a wayto establishthis resultwithout counting?
139. Prove that the polyhedron whose verticesare centers of faces
of a tetrahedron is a tetrahedronagain.1\1770.* Prove that the polyhedron whose vertices are centersof facesof an octahedron (or icosahedron) is a cube (respectively a dodeca-hedron).
1J1. Which of the five Platonic solidshave a center of symmetry?
1\1772. Describe all ways to superimpose a regular tetrahedronontoit-self by rotations, and show that there are 12such rotations (including
the trivial one).
1\1773. Show that each of the 12 rotations of a regular tetrahedronpermutes the four vertices, and that to different rotations there cor-
respond different permutations of the set ofvertices.1JJ. How many planes of symmetry does a regular tetrahedronhave?
1\1775.* Realize all permutations of the four vertices of a regular tetra-hedron by reflectionsin symmetry planes and rotations.
1\177 6. Prove that an octahedron has as many planes of symmetry andaxes of symmetry of eachorderasa cube does.

74 Chapter 2. POLYHEDRA
147. The same-- about icosahedron and dodecahedron.
148. Show that a cubehas nine planes of symmetry.
149. Locate all 15 planesof symmetry of an icosahedron.
150.* Find all axes of symmetry (of any order) of an icosahedron,and show that there are in total 60 ways (includingthe trivial one)
to superimpose the icosahedron onto itself by rotation.
151. Describe cross sections of the icosahedronor dodecahedron by
the plane passing through the center and perpendicularto one of the
axes of symmetry.
152. Do there existsix lines passing through the same point andmakingcongruent angles to each other?
15o\370. Show that diagonals of a dodecahedron's facesare edgesoffive
cubes inscribed into the dodecahedron.
154.* Showthat eachofthe 60 rotations of a dodecahedron permutesthe five cubes inscribed into it, and that to different rotations there
correspond different permutations of the set of five cubes.
155. Give an accurate construction of an n-gonal antiprism (refer-ring to Figure 89as an e\177ample with n -- 5)\177 a polyhedron which hastwo parallel regular \177z-gons as bases, 2\177z regular triangles as lateralfaces, and all of whose polyhedral angles are congruent. Prove thatwhen \177z= 3, the antiprism is an octahedron.Hint: Seethe front cover.
18\177. Cut an icosahedron into two regular pyramids and an antiprism.
187.* Find and compare the numbers' of planes and axes of symmetry(of each order)of: (a) a regular \177z-gon in space, (b) the polyt\177edron
obtained from two copies of a regular \177z-gonal pyramid attached to
each other by their bases,(c) a regular r\177-gonal prism, (d) an r\177-gonal
antiprism.
1/\1778. Compute volumes of regular tetrahedron and octahedronwith
the edge a.
1/\1779.* Prove that the volume of an icosahedron with the edgea isequal to \1772(34- x/\177)a 3.
160.* Prove that the volume of a dodecahedronwith the edge a is
to +Hint: Representthe dodecahedronas a cube with congruent \"tent-
like\" solids attached to each of its sixfaces, and compute the volumeof the solid first.
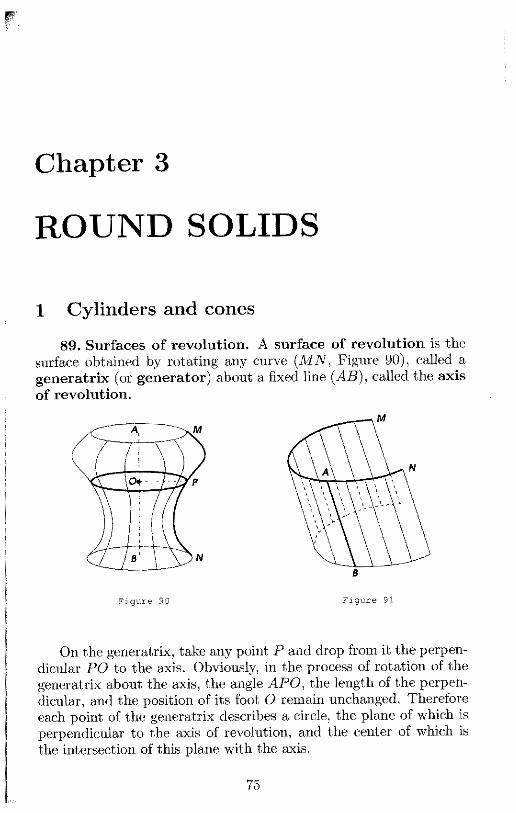
Chapter 3
ROUND SOLIDS
I Cylindersandcones89. Surfaces of revolution. A surface of revolution is the
surfaceobtainedby rotating any curve (MN, Figure 90), called ageneratrix (or generator) about a fixed line (AB), calledtheaxisofrevolution.
M
A M
B
Figure 90 Figure 91
On the generatrix, take any point P and drop from it the perpen-dicularPO to the axis. Obviously, in the process of rotation of thegeneratrixabout the axis, the angle APO, the length of the perpen-dicular, and the position of its foot O remainunchanged. Therefore
each point of the generatrix describes a circle,the plane of which isperpendicular to the axis of revolution, and the center of which isthe intersectionof this planewith the axis.
75
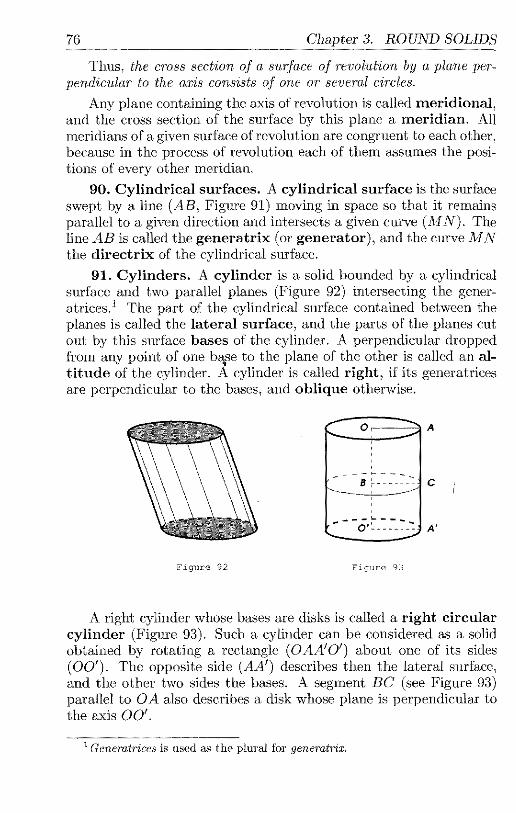
76 Chapter 3. ROUND SOLIDS
Thus, the cross section of a surface of revolution by a plane per-
pendicular to the axis consistsof one or several circles.
Any plane containing the axis of revolution is calledmeridional,and the cross section of the surface by this planea meridian.All
meridians of a given surface of revolutionare congruent to each other,
because in the process of revolution eachof them assumesthe posi-
tions of every other meridian.
90. Cylindrical surfaces. A cylindrical surface is the surfaceswept by a line (AB, Figure 91) moving in space so that it remainsparalleltoa given direction and intersects a given curve (MN). ThelineAB is called the generatrix (or generator), and the curve MN
the directrix of the cylindrical surface.91. Cylinders. A cylinder is a solid bounded by a cylindrical
surfaceand two parallel planes (Figure 92) intersecting the gener-atrices.\177 The part of the cylindrical surface contained betweentheplanesis called the lateral surface, and the parts of the planescutout by this surface bases of the cylinder. A perpendicular dropped
from any point of one be\177se to the plane of the other is calledan al-titude ofthe cylinder. A cylinder is called right, if its generatricesare perpendicularto the bases, and oblique otherwise.
A
C \177
Figure 92 Figure 93
A right cylinder whose bases are disksis called a right circular
cylinder (Figure 93). Such a cylinder can be considered as a solidobtained by rotating a rectangle (OAA'O') about one of its sides(OO'). Theoppositeside(AA \177) describes then the lateral surface,and the other two sides the bases. A segment BC (see Figure 93)
parallel to OA also describes a disk whoseplaneis perpendicular to
the axis OO \177.
Generatrices is used as the plural for generatrix.

i. Cylinders and cones
Thus, crosssectionsofa right circular cylinder by planes parallelto the bases are disks.
In our elementary exposition, we will consider only right circularcylinders,and for the sake of brevity refer to them simply as cylin-
ders. Sometimes we will deal with prisms whosebasesare polygons
inscribed into the bases of a cylinder, or circumscribedabout them,
and the altitudes are congruent to the altitudeof the cylinder. We
will call such prisms inscribed into (respectivelycircumscribedabout) the cylinder.
92. Conical surfaces. A conical surface is the surface ob-tained by moving a line (AB, Figure 94) so that it passesthrough a
fixed point (S) and intersects a given curve (MN). The line AB is
called a generatrix, the curve MN the directrix, and the point Sthe vertex of the conicalsurface.
$
Figure 94 Figure 95
93. Cones. A cone is a solidenclosedbetween a conical surface
and a plane intersecting all generatriceson onesideof the vertex
(Figure 95). The part of the conicalsurfaceenclosedbetv\177een the
vertex and the plane is called the lateral surface,and the part of
the plane cut out by the conical surface the base of the cone. Theperpendicular dropped from the vertex to the plane of the baseiscalled the altitude of the cone.
A cone is called right circular if the base is a disk,and the al-
titude passes through its center (Figure96). Such a cone can be ob-tained by rotatinga right triangle (SOA) about one of its legs (SO).Thenthe otherleg(OA) describes the base, and the hypotenuse (SA)the lateralsurface of the cone. A segment BC (Figure 96) parallelto OA also describes a disk perpendicular to the axisSO.
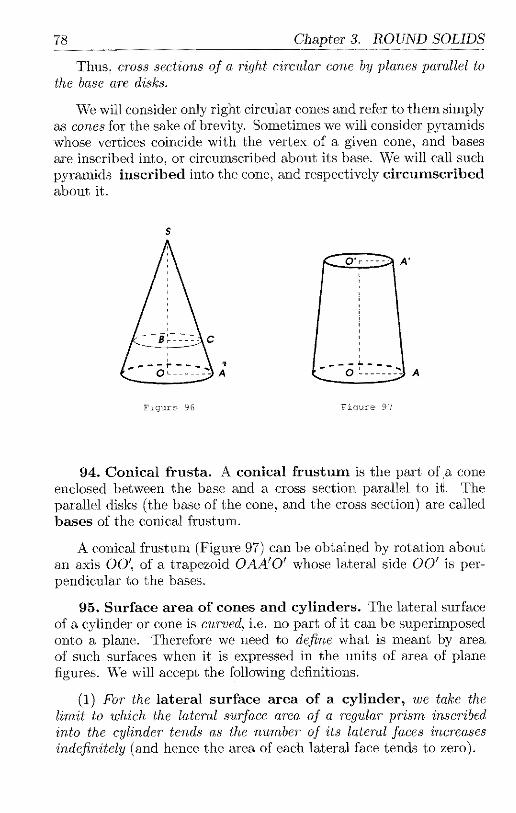
78 Chapter 3. ROUND SOLIDS
Thus, cross sections of a right circular cone by planes parallel tothe base are disks.
We will consider only right circular cones and referto them simply
as cones for the sake of brevity. Sometimeswe will consider pyramids
whose vertices coincide with the vertexof a given cone, and bases
are inscribed into, or circumscribedabout itsbase.We will call such
pyramids inscribed into the cone,and respectively circumscribed
about it.
',4
Figure 96 Figure 97
94. Conical frusta. A conical frustum is the part of.a coneenclosedbetweenthe base and a cross section parallel to i\177. The
parallel disks (the base of the cone,and the cross section) are calledbases of the conicalfrustum.
A conical frustum (Figure 97) can be obtainedby rotation about
an axis OO', of a trapezoidOAA\177O \177whose lateral side OO \177is per-
pendicular to the bases.
95. Surface area ofconesandcylinders.The lateral surface
of a cylinder or cone is curved, i.e. no part of it can be superimposedonto a plane. Therefore we need to define what is meant by area
of such surfaces when it is expressed in the units of area of plane
figures. We will accept the following definitions.
(1) For the lateral surface area of a cylinder,we take the
limit to which the lateral surfaceareaof a regular prism inscribed
into the cylinder tends as the numberof its lateralfaces increases
indefinitely (and hence the area of each lateral facetendstozero).
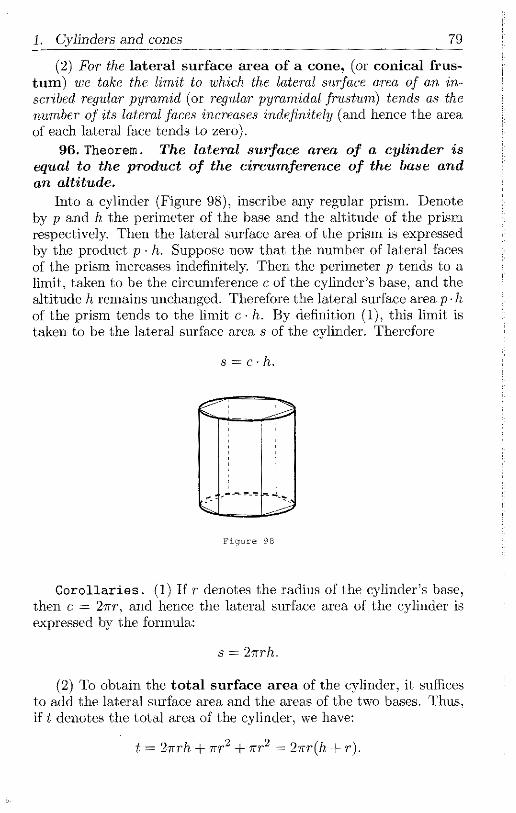
l. Cylinders and cones 79
(2) For the lateral surface area of a cone,(or conical frus-
turn) we take the limit to which the lateral surfaceareaof an in-
scribed regular pyramid (or regular pyramidal frustum) tends as the
number of its lateral faces increases indefinitely(and hencethe area
of each lateral face tends to zero).96. Theorem. The lateral surface area of a cylinder is
equal to the productof the circumferenceof the base andan altitude.
Into a cylinder (Figure98), inscribe any regular prism. Denoteby p and h the perimeterof the baseand the altitude of the prismrespectively. Then the lateralsurface area of the prism is expressedby the productp. h. Supposenow that the number of lateral facesof the prismincreasesindefinitely. Then the perimeter p tends to alimit,taken to be the circumference c of the cylinder's base, and thealtitudeh remains unchanged. Therefore the lateral surface area p-hof the prismtendsto the limit c.h. By definition (1), this limit istaken to be the lateral surface area s of the cylinder. Therefore
Figure 98
Corollaries. (1) If r denotes the radiusof the cylinder'sbase,then c: 27rr, and hence the lateral surfaceareaof the cylinder is
expressed by the formula:
s = 2\177rrh.
(2) To obtain the total surface area of the cylinder,it suffices
to add the lateral surface area and the areasofthe two bases. Thus,
if t denotes the total area of the cylinder, we have:
t = 2\177rrh + \177rr2 + \177rr\177= 2\177rr(h + r).

80 Chapter 3. ROUND SOLIDS
97. Theorem. The lateral surface area of a cone is equalto the productof thecircumferenceof the base and a halfof a generatrix.
Intoa cone (Figure 99), inscribe any regular pyramid, and denoteby p and a the numbers expressing the perimeterof the baseand
the length of the apethem of this pyramid. Then (\36560) the lateral
surface area of the pyramid is expressedas !p2 \337a. Suppose now thatthe number of the lateral facesof the pyramid increases indefinitely.
Then the perimeter p tends to a limit, taken for the circumferencec of the cone%base,and the apethem a tends to the generatrix 1ofthe cone.(Indeed,the generatrix SA is the hypotenuse of the righttriangleSAL and is greater than the leg SL which is an apethem of
the pyramid. The other leg AL is a half of the side of the regularpolygon in the base, and tends to zeroasthe number of sides increases
indefinitely. Since SA- SL < AL, we conclude that a tends to 1.)Thereforethe lateralsurface area -\177p\177. \337a of the pyramid tends to thelimit \253c. 1. By definition (2) the limit is taken to be the lateral
surface area s of the cone. Thus
s-c.l/2.
II
A
Figure 99 Figure 100
Corollaries. (1) Since c = 2\177r, where. r is the radius of thebase,the lateralsurface area of the cone is expressed by the formula:
1s = - \3372\177r. 1 = \177rl.
2
(2) The total surface area of the cone is obtainedfrom the
lateral one by adding the area of the base. If t denotesthe total
area, we have:t = \177rrl q- \177rr2 = 7rr(1 + r).

1. Cylinders and cones 8198.Theorem. The lateral surface area of a conical frus-
turn is equal to the product of a generatrix and half thesumofthecircumferencesof the bases.
Into a conical frustum (Figure 100),inscribeany regular pyrami-
dal frustum. Denote by p and p' perimeters of the lower and upperbases, and by a the length of an apothem. Then (\36560) the lateral
surface area of the pyramidal frustum is equal to \253(p q-p')a. As thenumber ofjateral faces increasesindefinitely, the perimeters p and p'tend to the limitstaken for the circumferences c and c' of the bases,and the apothem a tends to the generatrix I of the conicalfrustum.
Therefore the lateral surface area of the pyramidal frustum tends to
a limit equal to \253(c + c')l. By definition (2), this limit is takenfor
the lateral surface area s of the conicalfrustum, i.e.
1 (c + c')l.s=\177
99. Corollaries. (1)If r and r' denote the radii of the lowerand upperbases,then the lateral surface area of a conical frustum is
expressed by the formula:
1 (2\177rr + 2\177rr')l = \177r(r + r')l.s=\177
(2) Considering the conicalfrustum (Figure 100) as a solid ob-tained by rotation of the trapezoid OAA\177O f about the axis OO f, drawthe midline BC of the trapezoid.We have:
1 (OA + O'A') = 1(r + r'), and hence r + r' = 2BC.
Therefore s = 2\177r. BC. l, i.e. the lateral surface area of a conical
frustum is equal to the product of a generatrixand the circumference
of the middle cross section.(3) The total surfaceareaof a conical frustum is
t = \177r(r 2 + r'2 + rl +
100. Nets of cylindersand cones.Into a cylinder (Figure
101), inscribe any regular prism, and then imagine that the lateralsurface of the prismiscut alonga lateral edge. Rotating lateral facesabout the edges onecan develop the surface (without breaking it ordistorting the faces)into a plane figure. The resulting figure is calledthe net (or development) of the lateral surface of the prism. The

82 Chapter 3. ROUND SOLIDS
net is a rectangle tfLMN consistingof as many smaller rectangles
as there are lateral facesof the prism.Thebase/F/N of the rectangle
is congruent to the perimeterof the base,and the altitude/fN to
the altitude of the prism.
/(
h/
Figure 101
Imagine now that the numberof lateralfaces of the prism in-creases indefinitely. Then thenet ofits lateralsurface becomes longer
and longer, and in the limit, tends to a certain rectangle/fPQN,
such that the altitude aiSd base are congruent respectively to the
altitude of the cylinder and the circumferenceofitsbase.This rect-
angle is called the net (or development) of the lateralsur.,face of
the cylinder. \177
$ $
Figure 102
Similarly, into a cone (Figure102),inscribe any regular pyra-
mid. We can cut its lateralsurface along an edge and then, rotatinglateral facesabout the edges,develop it to the plane into a netshapedas a polygonal sector StfL, which consists of as many isosce-lestrianglesas there are lateral faces in the pyramid. The segmentsStf,Sa,Sb,... are congruent to lateral edges of the pyramid (or togeneratricesofthecone),and the length of the broken line tfab... L
1. Cylinders and cones 83
is equal to the perimeterof the pyramid'sbase.As the number of
lateral faces increases indefinitely,the net tendsto the sector SKM
whose radius SK is congruent to a generatrix of the cone, and thelength of the arcKMis equal to the circumference of the cone's base.Thissectoris called the net of the lateral surface of the cone.
One can similarly construct the net of the lateral surfaceof aconicalfrustum (Figure 102) as the part PIfMQ of an annulus.It is easy to seethat the lateral surface area of a cylinder, cone,orconical frustum is equal to the area of the correspondingnet.
101.Volumesofcylindersand cones.
Definitions. (1) For the volume of a cylinder, we take
the limit to which the volume of a regular prism inscribed into thecylinder tends as the number of lateralfacesof the prism increases
indefinitely.
(2) For the volume of a cone(or conical frustum), we take thelimit to which the volume of an inscribed regular pyramid (or regularpyramidal frustum) tends as the number of lateral faces increasesindefinitely.
Theorems. (1) The volume of a cylinder is equal to theproductof theareaof the base and the altitude.
(2) The volume of a coneis equal to the product of thearea of the base and a thirdof thealtitude.
Into a cylinder, inscribe any regular prism, and into a coneany
regular pyramid. Then, if we denote by B the areaof the base of theprism or pyramid, their altitudeby h, and the volume by V, then wefind (\36565 and \36568):
for prisms V = Bh; for pyramids V = --1Bh.3
Imagine now that the number of lateral faces of the prism or pyramid
increases indefinitely. Then B tends to a limit equal to the area b
of the base of the cylinder or cone,and the altitude will remain
unchanged. Therefore the volume V will tend to the limit bh in
the case of prisms, and \253bh in the case of pyramids. Therefore thevolume v of the cylinder or cone is given by the formula:
for the cylinder v = bh; for the cone v = -lbh.3
Corollary. If r denotesthe radiusof the baseof a cylinder or
cone, then b = \177rr2, and hence for the volume of the cylinder we have
v = \177rr2h, and for the volume of the cone v = \177rr\177'h/3.
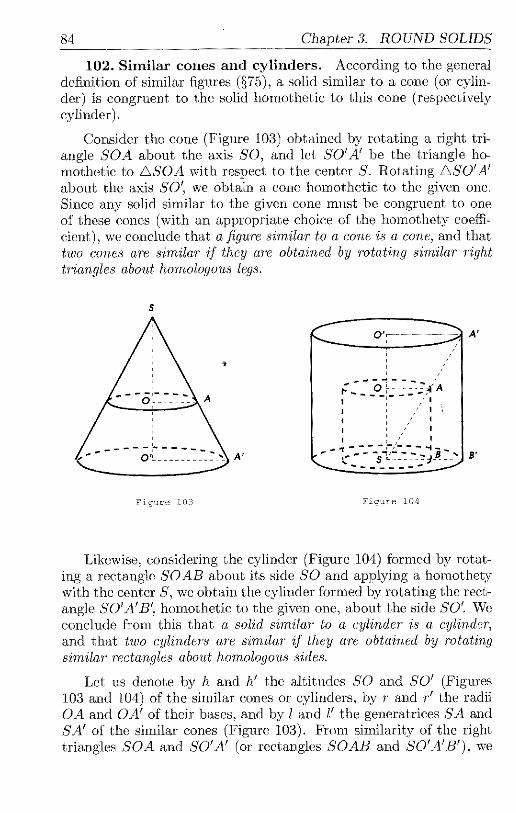
84 Chapter 3. ROUND SOLIDS
102. Similar cones and cylinders. According to the general
definition of similar figures (\36575), a solid similar to a cone (or cylin-
der) is congruent to the solid homothetic to this cone(respectively
cylinder).
Consider the cone (Figure 103) obtained by rotating a right tri-angle SOA about the axisSO, and let SO\177A' be the triangle ho-mothericto/\177SOA with respect to the center S. Rotating/\177SO'A\177
about the axis SO \177,we obtain a cone homothetic to the given one.Sinceany solid similar to the given cone must be congruent to one
of these cones (with an appropriate choiceof the homothety coeffi-
cient), we conclude that a figure similar to a coneisa cone, and that
two cones are similar if they are obtained by rotating similar righttriangles about homologouslegs.
AJ
Figure 103 Figure 104
Likewise, considering the cylinder (Figure104)formedby rotat-
ing a rectangle SOAB about its sideSO and applying a homothety
with the center S, weobtainthe cylinder formed by rotating the rect-angle SO\177A\177B \177,homothetic to the given one, about the sideSO( We
conclude from this that a solid similar to a cylinder is a cylinder,
and that two cylinders are similarif they are obtained by rotatingsimilar rectangles about homologoussides.
Let us denote by h and h' the altitudes SO and SO' (Figures
103 and 104) of the similar cones or cylinders,by r and / the radiiOA and OA ' of their bases, and by 1and 1\177the generatrices SA and
SA \177of the similar cones (Figure 103). From similarity of the right
triangles SOA and SO'A' (or rectanglesSOABand SO'A'B'), we

1. Cylinders and cones 85
find:
r h r l-- = -- and -- = -
Applying properties of equal ratios, we derive:
r+h r r+l rr\177q-h \177 r\177 and r\177q-l\177 r\177.
Using these proportions we obtain the following results.
103. Theorem. Lateral and total surface areas of similarconesor cylinders are proportional to the squares of theradii or altitudes,andtheirvolumes are proportional to the
cubes of the radii or altitudes.Let s, t, and v be respectively: the lateralsurface,totalsurface,
and volume of one cone or cylinder, and st, t\177,and v \177be those of theother solid similar to the first one. For the cylinders, we have:
h\1772'
For the cones, we have:
v
\177rl r 1 r 2 h 2
7rr(r + l) r r + l r2. h 2
7rr\177(r \177+ l \177) - r \177r \177+ l \177 r\1772 - h\1772,
\253Trr2h _ ( r ) 2 h _ r 3 h 3
EXERCISES
161. Show that the surfaceobtainedby translating a curve in thedirection of a given lineis cylindrical.162.Find all planes, axes, and centers of symnietry of a (right cir-
cular) cylinder.
163. Prove that an oblique cylinder (\36591) is equivalent to the right
cylinder with the same generatrixand the base congruent to theperpendicular cross sectionof the obliquecylinder.

86 Chapter 3. ROUND SOLIDS
164. Use Cavalieri'sprincipleto prove that an oblique cylinder isequivalent to a right cylinder with the same base and the generatrixcongruent to the altitude of the oblique cylinder.165. A cross section of a (right circular) cylinder, not intersectingthe bases,makes the angle c\177with them. Compute the area of thecrosssectiongiven the radius r of the base.166. Find a triangular pyramid which admits a square as a net, and
compute its volume, assuming that the side of the squareisa.16'7.On the surface of a regular tetrahedron, find the shortest path
between the midpoints of two opposite edges.168. Can a unit cube be wrapped into a squarepieceof paper with
sides 3?
169. The axial cross section (i.e.the cross section passing throughthe axis) of a conehas the angle of 60 \370at the vertex. Compute theangle at the vertexof the cone'snet.1'70.Prove that the plane passing through a generatrix of a cone
(resp. cylinder) and perpendicular to the planeofaxialcrosssectionpassing through this genOatrix does not have other commonpointswith the cone (resp. cylinder).l\177emark: This plane is called tangent to the cone(resp.cylinder).
1'71. Can a pair of cones with a common vertex have: (a) a commontangent plane? (b) infinitely many common tangent planes?
1'72. Two coneswith a common vertex which have a common gen-eratrix and the same tangent plane passing through it are calledtangent. \177Prove that two tangent cones have a common symmetry
plane.
1'73. The lateral surface area of a cylinder is equal to half of the
total surface area. Compute the ratio ofthe altitudetothediameter
of the base.
174{. Generatrices of a conemakethe angle of 60 \370with the base.
Compute the ratio of the lateralsurfaceareato the area of the base.
1'75. Compute the volume and the lateralsurface area of a conicalfrustum that has the generatrix15cm long, and the radii of the bases18cm and 27 cm.
1 '76. In a coneof volumeV, two cross sections parallel to the base aredrawn dividing the altitudeinto three congruent parts. Compute thevolume of the conicalfrustum enclosed between these cross sections.
1'77. Compute the volume and the total surface area of the solidobtained by rotating a regular triangle with the edge a about theaxispassing through its vertex and parallel to the oppositeside.

1. Cylinders and cones
178. Compute the volume and the total surface area of the solidobtained by rotating a squarewith the side a about the axis passingthroughoneof the vertices and parallel to one of the diagonals.17\177/. Compute the total surface area of a solidobtainedby rotating
a thombus of the area A about one of its sides.
180. Compute the volume and the total surface area of the solidobtainedby rotating a regular hexagon with the side a about oneofitssides.181.The lateral surface area of a cone is twicethe areaof the base,
and the area of the cross sectionby the plane containing the axis isA. Compute the volume of the cone.
182. Compute the volume of a coneif the radius of the base is r andthe angleat the vertexof the cone's net is: (a) 90 \370,(b) 120 \370,(c) 60 \370.
18S. Prove that the volume of a coneis equal to one third of the
product of the lateral surface area and the distancefrom the center
of the base to a generatrix.184.*Prove that the volume of a conical frustum is equal to the
sum of the volumes of three cones, all having the same altitude asthe conical frustum, and whose bases are respectively: the lower baseof the frustum, the upperbaseof the frustum, and a disk with thearea equalto the geometric mean between the areas of the other two
bases.
18/5.* Compute the ratio of volumesof two solids obtained by divid-
ing a cone by the plane passing through the vertex and intersectingthe basealong a chord congruent to the radius.
186.* Two perpendiculargeneratricesdivide the lateral surface areaof a cone in the ratio2: 1. Compute the volume of the cone if theradius of its baseis r.187.*Find out which of the cross sections, passing throughthe ver-
tex of a cone, has the maximal area, and prove that it is the axialcrosssectionif and only if the radius of the basedoesnot exceed the
altitude of the cone.
188. Compute the volume and lateral surface area of the cylinderwhosebasesarecircumscribed about two faces of a given octahedronwith the edge a.
18\177/.* Four congruent cones with a common vertex are pairwisetan-gent to each other. Compute the ratio of the altitude of eachcone
to the generatrix.
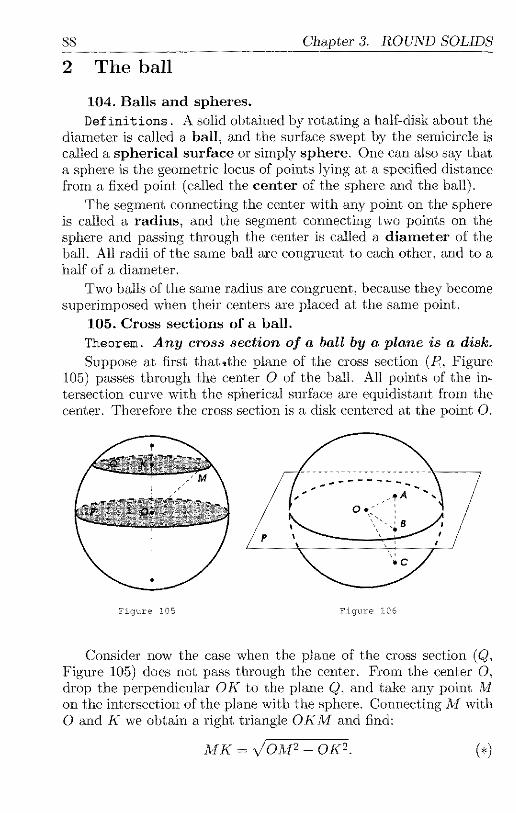
88 Chapter 3. ROUND SOLIDS
2 The ball
104.Ballsand spheres.
Definitions. A solid obtained by rotating a half-disk about the
diameter is called a ball, and the surfaceswept by the semicircle iscalled a spherical surface or simply sphere. One can also say thata sphereis the geometriclocusofpointslying at a specified distance
from a fixed point (calledthe center of the sphere and the ball).Thesegment connecting the center with any point on the sphere
is called a radius, and the segment connecting two points on thesphereand passing through the center is called a diameter of theball.All radii of the same ball are congruent to eachother, and to ahalf of a diameter.
Two ballsofthe sameradius are congruent, because they becomesuperimposed when their centersare placed at the same point.
105. Cross sections of a ball.Theorem. Any cross section of a ball by a plane is a disk.
Suppose at first that,the plane of the crosssection(p, Figure
105) passes through the center O of the ball. All points of the in-tersection curvewith the spherical surface are equidistant from thecenter. Thereforethe cross section is a disk centered at the point O.
Figure 105 Figure 106
Consider now the case when the planeof the cross section (Q,
Figure 105) does not pass through the center. From the center O,drop the perpendicular014to the plane Q, and take any point Mon the intersectionofthe plane with the sphere. Connecting M withO and K we obtain a right triangle OKM and find:
MK = x/OM2 - OK2. (,)

2. Tl\177e ball 89
As the position of the point M varies, the lengths of the segmentsOM and OK donotchange, and therefore the distance MK remainsconstant. Thus the crosssectionof the sphere lies on a circle, andthe point K is its center. It follows from (,) that, conversely,every
point M of this circle lies on the sphere.Corollaries. Let _R and r denote the lengths of the radii of a
ball and a cross section, and d be the distancefrom the center to the
plane of the crosssection.Then the equality (,) assumes the formr - v/-R 2 - d 2. It follows that:
(1) The greatest radius of the cross section is obtained if d = O,
i.e. if the plane passes through the center of the ball. Then r - R.
The circle obtained as such a cross sectionof the sphereis called a
great circle.
(2) The smallest radius of the crosssectionis obtained when d ----
R. In this case, r -- 0, i.e. the disk turns into a point.
(3) Cross sections equidistantfrom the centerare congruent.
(4) Out of two cross sections, the one that is closer to the centerof the ball has the greaterradius.
106.Greatcircles.Theorem. Any plane (P, Figure 106) passing through the
centerof a balldivides its surface into two symmetric andcongruent parts (calledhemispheres).
On the spherical surface, consider any point A, and let AB be
the perpendicular dropped from the point A to the plane P. Extendthe line AB past the pointB until it meets the spherical surface at apoint C. Connecting A, B and C with the center O, we obtain two
congruent right triangles ABO and CBO. (They have a common
leg BO and hypotenuses AO and COcongruent as radii of the ball.)Therefore AB - BC, and hence to each point A of the sphericalsurface,therecorresponds another point C of the same surface sym-
metric to the point A about the plane P. Thus the two hemispheres
into which the plane P divides the sphere are symmetric.
The hemispheres are not only symmetric but also congruent, sinceby cutting the ball along the plane P and rotating one of the partsthrough 180 \370about any diameter lying in the plane P we will super-
impose the first hemisphere onto the second.Theorem.Throughany two points of a spherical surface,
other than the endpointsof the samediameter, one can
draw a great circle, and such a greatcircleis unique.
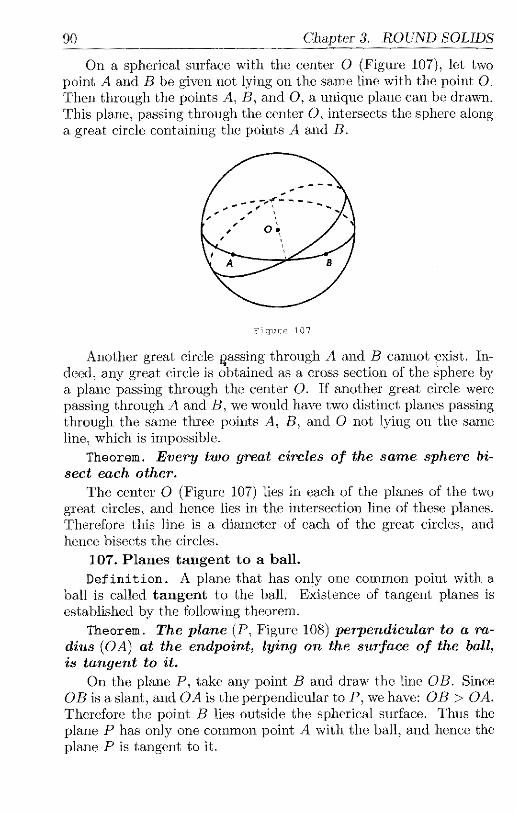
90 Chapter 3. ROUND SOLIDS
On a sphericalsurfacewith the center O (Figure 107), let twopoint A and B be given not lying on the sameline with the point O.Then through the pointsA, B, and O, a unique plane can be drawn.
This plane, passing through the center O, intersectsthe spherealong
a great circle containing the points A and B.
Figure 107
Another great circle l\177assing through A and B cannot ,...exist.In-deed, any great circle is obtained as a cross sectionof the \177phere by
a plane passing through the center O. If another greatcircle were
passing through A and B, we wouldhave two distinct planes passing
through the same three pointsA, B, and 0 not lying on the sameline,which is impossible.
Theorem. Every two great circles of the same spherebi-
sect each other.
The center O (Figure 107)liesin each of the planes of the two
gmat circles, and hence lies in the intersection lincof theseplanes.Therefore this linc is a diameter of each of the gmat circles,and
hence bisects the circles.
107. Planes tangent to a ball.Definition.A plane that has only one common point with a
ball is called tangent to the ball. Existence of tangent planesisestablishedby the following theorem.
Theorem. The plane (P, Figure108)perpendicularto a ra-dius(OA) at the endpoint, lying on the surface of the ball,is tangentto it.
On the plane P, take any point B and draw the line OB. SinceOB is a slant,and OA is the perpendicular to P, wc have: OB > OA.
Therefore the point B lies outside the sphericalsurface.Thus the
plane P has only one commonpoint A with the ball, and hence theplane P is tangent to it.

2. The ball 91
Converse theorem. A tangent plane (P, Figure 108) is per-pendicular to the radius(OA) drawn to the point of tan-gency.
Sincethe point .4of tangency is the only common point of theplaneP and the ball, any other point B of the planeP liesoutsidethe spherical surface, i.e. is farther from the center than the point
.4. Therefore O\1774 is the shortest segment from the point O to theplane,i.e.O\1774 is perpendicular to P.
A line that has only one common point with a ball is calledtan-gent to it. It is easy to see that there are infinitely many lines
tangent to the ball at a given pointofthe spherical surface. Namely,
every line (AC, Figure 108)passingthrough the given point (.4) andlying on the plane,tangent to the ball at this point, is tangentto the
ball at this point.
Figure 108 \177igure 109
108. Spherical segments and frusta. A plane (P, Figure
109) intersecting a ball divides it into two solids (U and V), eitherof which is calleda domeora sphericalsegment.The disk found
in the cross section is calledthe baseofthe spherical segment. The
segment KM of the diameterperpendicularto the base is called
the altitude of the sphericalsegmentU. Thesurface of a spherical
segment consists of two parts: the base,and a part of the sphere,which will be calledthe lateral surfaceofthe spherical segment.
The part of a ball (W, Figure109)enclosedbetween two paral-
lel planes (P and Q) is calleda zoneorsphericalfrustum.The
disks found in the cross sections of the ball by these planes are calledthe bases of the sphericalfrustum. The part of the spherical sur-face enclosedbetweenthe basesis called the lateral surface of the
spherical frustum, and the part KL of the diameter perpendicular
to them, the altitude.
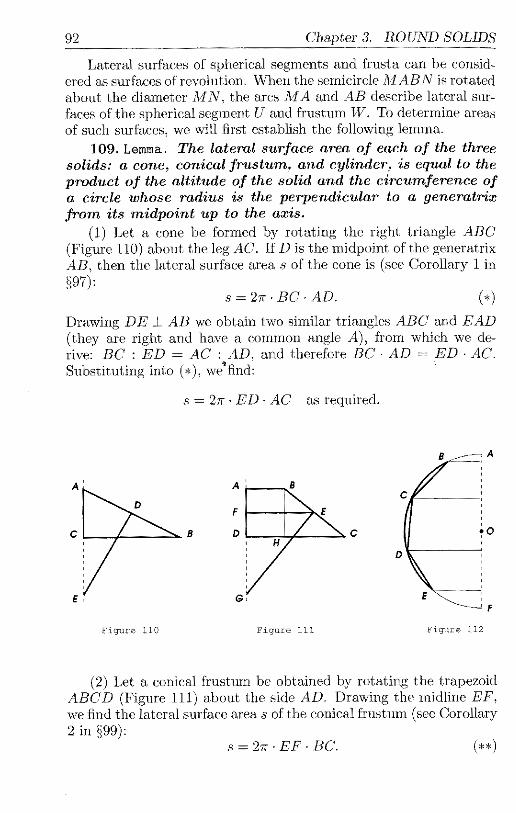
92 Chapter3. ROUND SOLIDS
Lateral surfaces of spherical segments and frusta can be consid-ered as surfaces of revolution. When the semicircleMABN isrotatedabout the diameter MN, the arcs MA and AB describelateralsur-
faces of the spherical segment U and frustum W. Todetermineareas
of such surfaces, we will first establish the following lemma.109. Lemma. The lateral surface area of each of the three
solids:a cone,conicalfrustum, and cylinder, is equal to theproduct of the altitudeofthesolidand the circumference of
a circle whose radius is the perpendicularto a generatrixfrom its midpoint up to the axis.
/1) Let a cone be formed by rotating the right triangle ABC/Figure110)about the leg AC. If D is the midpointof the generatrix
AB, then the lateral surface area s of the cone is (see Corollary i in\36597):
s = 2\177r. BC. AD. (,)
Drawing DE \177_AB we obtain two similar triangles ABC and EAD(they are right and have a common angie A), from which we de-rive: BC : ED = AC : AD, and therefore BC. AD -- ED. AC.Substituting into (,), we\177find: '\"'
s = 2\177-. ED. AC as required.
A
C B
A
F
D
B
C
D
,0
F
Figure 110 Figure 111 Figure 112
(2) Let a conicalfrustum be obtained by rotating the trapezoidABCD (Figure111)about the side AD. Drawing the midline EF,we find the lateral surface area s of the conicalfrustum (see Corollary
2 in \36599):
s = 2\177r. EF. BC. (**)
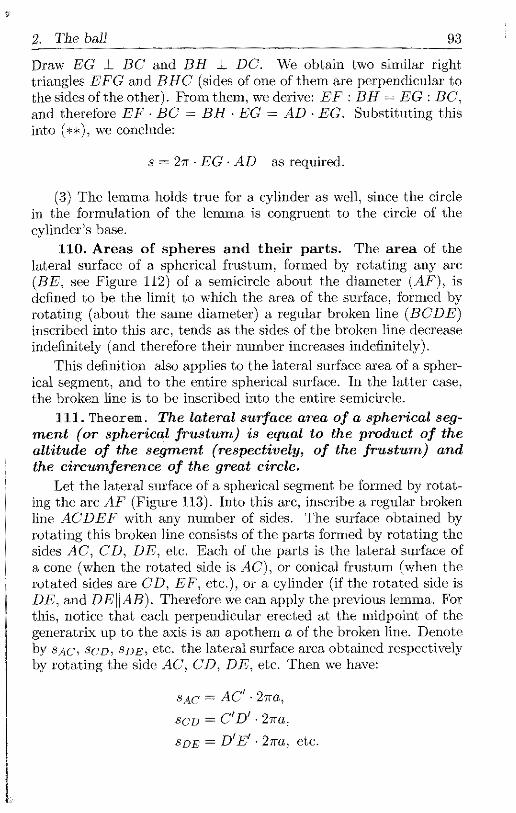
2. The ball 93
Draw EG 2_ BC and BH _1_ DC. We obtain two similar righttriangles EFG and BHC (sidesofoneofthem are perpendicular to
the sides of the other). Fromthem, we derive: EF: BH = EG: BC,and thereforeEF. BC : BH \337EG = AD \337EG. Substituting this
into (**), we conclude:
s = 2\177-. EG. AD as required.
(3) The lemmaholdstrue for a cylinder as well, since the circlein the formulation of the lemma is congruent to the circleof thecylinder'sbase.
110.Areasof spheres and their parts. The area of thelateral surfaceof a spherical frustum, formed by rotating any arc(BE, see Figure112)ofa semicircle about the diameter (AF), isdefined to be the limit to which the area of the surface, formed by
rotating (about the same diameter) a regular brokenline(BCDE)inscribed into this arc, tends as the sides of the brokenline decrease
indefinitely (and therefore their number increases indefinitely).This definition also applies to the lateral surface area of a spher-
ical segment, and to the entire spherical surface. In the lattercase,the broken line is to be inscribed into the entiresemicircle.
111.Theorem. The lateral surface area of a spherical seg-ment (or sphericalfrustum)is equal to the product of thealtitude of the segment (respectively,of the fvustum) and
the circumference of the great circle.Letthe lateral surface of a spherical segment be formed by rotat-
ing the arc AF (Figure 113). Into this arc,inscribe a regular broken
line ACDEF with any number of sides. The surface obtained by
rotating this broken line consists of the parts formed by rotating the
sides AC, CD, DE, etc. Eachofthe parts is the lateral surface ofa cone (when the rotatedsideisAC), or conical frustum (when therotated sides are CD,EF, etc.),or a cylinder (if the rotated side isDE, and DEIIAB). Therefore we can apply the previous lemma. Forthis, noticethat each perpendicular erected at the midpoint of thegeneratrixup to the axis is an apothem a of the brokenline.Denote
by SAC, SCD, SDZ, etc. the lateral surfaceareaobtained respectively
by rotating the side AC, CD, DE, etc. Then we have:
s\1774c = AC \177' 2\177ra,
$CD : C\177D \177' 27ra,
SDZ = D\177E \177' 27ra, etc.

94 Chapter 3. ROUND SOLIDS
Adding these equalities term-wise, we find that the area SACDEF of
the surface formed by rotating the broken lineACDEFis given by:
SACDE F -- AF \177. 2\177-a.
As the number of sides of the regularbrokenline increases indefi-
nitely, the apothem a tends to a limit congruent to the radius R ofthe sphere,and the segment AF', which is the altitude h of the spher-icalsegment, remains unchanged. Therefore the limit s, to which theareaof the surface obtained by rotating the broken line tends, and
which is taken for the definition of the lateral surfaceareaof the
spherical segment, is given by the formula:
s = h. 27rR = 2\177rRh.
Consider now the case when the broken line is inscribedinto any
arc CF (rather than AF), and thus generatesunder rotation the
lateral surface of a spherical frustum. The above argument remains
the same and leads to the sameconclusion about the lateral surface
area s \177of the spherical f\177ustum:
s \177= h'. 27rR = 27rRh\177,
where h \177denotes the altitude C\177F \177of the spherical frustum.
112. Theorem. The surface area of a sphereis equal to
the product of the circumference of the great circleandthediameter,or equivalently, the surface area of a sphere is equalto four timesthe area of the great disk.
The area of the sphere,obtained by rotating the semicircle ADB(Figure 113), can be considered as the sum of the surface areasformed by rotating the arcs AD and DB. Therefore, applying the
previous theorem, we obtain for the area s of the sphere:
s = 27rR. AD \177+ 27rR. D\177B = 27rR(AD \177+ D\177B) = 2\177R. 2R = 4\177R 2.
Corollaries. (1) The areas of spheres have the same ratio asthe squares of their radii, or diameters, since denoting by s and Sthe areasof two spheres of radii r and R, we find:
s'S=47rr 2'47rR2=r 2'R2=(2r)2' (2R) 2.
(2) The area of a sphere is equal to the lateral surface area ofthe cylinder circumscribedabout it (Figure 114), because the radiusof the. cylinder'sbasecoincides with the radius R of the sphere, the
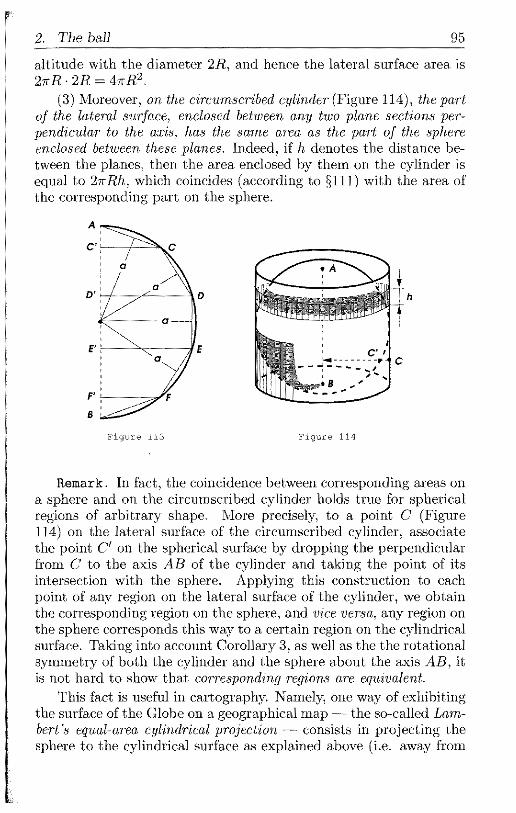
2. The ball 95
altitude with the diameter 2R, and hencethe lateralsurface area is
2\177rR. 2R = 4\177rR 2.
(3) Moreover, on the circumscribed cylinder(Figure114),the part
of the lateral surface, enclosed between any two plane sections per-
pendicular to the axis, has the same area as the part of the sphereenclosedbetween these planes. Indeed, if h denotes the distance be-tween the planes, then the area enclosed by them on the cylinder is
equal to 2\177rRh, which coincides (according to \365111) with the area ofthe corresponding part on the sphere.
Figure 113 Figure 114
Remark. In fact, the coincidencebetweencorrespondingareas on
a sphere and on the circumscribed cylinder holdstrue for spherical
regions of arbitrary shape. More precisely, to a point C (Figure
ll4) on the lateral surface of the circumscribedcylinder, associate
the point C' on the sphericalsurfaceby dropping the perpendicular
from C to the axis AB of the cylinder and taking the point of itsintersectionwith the sphere. Applying this construction to eachpoint of any region on the lateral surface of the cylinder, we obtainthe correspondingregion on the sphere, and vice versa, any regiononthe spherecorresponds this way to a certain region on the cylindrical
surface. Taking into account Corollary 3, as well as the the rotationalsymmetry of both the cylinder and the sphere about the axis AB, itis not hard to show that corresponding regions are equivalent.
This fact is useful in cartography. Namely, one way of exhibitingthe surfaceofthe Globeona geographical map -- the so-called Lain-bert's equal-areacylindrical projection- consists in projecting thesphere to the cylindrical surface as explained above (i.e. away from

96 Chapter 3. ROUND SOLIDS
the axis passingthrough the poles) and then unrolling the cylinderinto the rectangularnet (see \365100). While it is generally impossibleto exhibitwithout distortion the surface of a sphere on a planemap,this method has the advantage of preserving proportions betweenthe areasofregions.For instance, the Antarctic may appear in thismap to have disproportionately large size (because the South pole isrepresentedon the cylinder by the whole circle of the bottom base),but in fact the image of the Antarctic occupiesthe samefraction of
the map as the continent itself of the Earth'ssurface.
A
C
D
Figure 115
113. Spherical sectors. Thesolidobtainedby rotating a sector
(COD, Figure 115) of a disk about a diameter (AB) not intersectingthe arc of the sector is called a spherical sector. This solid isboundedby the lateral surfaces of two cones and the lateralsurface
of a spherical frustum. The latter is calledthe base of the spherical
sector. When the axis of rotation (BO) coincideswith one of the
radii of the disk sector(e.g.ofBOE),the resulting spherical sector isbounded by the lateralsurfacesofa cone and of a spherical segment.As an extreme caseof a spherical sector, the entire ball is obtainedby rotating a semi-diskabout its diameter.
To evaluate the volume of a sphericalsector,we need to prove
the following lemma.114. Lemma. If a triangle ABC (Figure 117) is rotated about
an axisAM, lying in the plane of the triangle and Passingthroughthe vertex A, but not intersecting the side BC, thenthe volumev of the solid of revolution thus obtained is equalto the productof thesurfacearea s formed by rotating theside BC and \253 of the altitude h dropped from the vertex A.

The b\17711 97
Consider the following three cases.(1) The axis coincides with the side AB (Figure 116). In this
casethe volume v is equal to the sum of the volumes of the two
cones obtained by rotating the right triangles BCD and DCA. Thefirst volume is \253zrCD 2. DB, the second \253zrCD 2. DA, and hence
v= \177vrCD2(DB + DA) = \177vrCD.CD. BA.
The productCD \337BA is equal to BC \337h since each expresses twicethe area of AABC. Therefore
1v = \3657rCD. BC. h.
But, accordingto Corollary 1 in \36597, the product vrOD \337BO is the
lateral surface area of the coneobtainedby rotating ABCD. Thus
v = sh/3.
B
D C
AC
Figure 116 Figure 117
(2) The axis does not coincide with AB and is not parallel to
BC (Figure 117). In this case the volume v is the difference of thevolumesVAMC and VAMB of the solids obtained by rotating AAMC
and AAMB. Using the result of the first case, we find:
h h
\177AMG-- \177$MG, \177AMB =
where sMc and sMBare surfaceareasobtained by rotating MC andMB. Therefore
h hv = (suc- suB)

98 Chapter 3. ROUND SOLIDS
(3) The axis is parallel to the sideBC (Figure 118). Then the
volume v is equal to the volume vBCDE of the cylinder, obtained byrotating the rectangleBCDE,minus the sum of the volumes VAEB
and VADC of the cones, obtained by rotating /\177AEB and /\177ADC.
Since bases of these solids have the same radius equal h, we find:
1v\177CDZ = \177rh2 ' ED, VAZ\177 = \365\177rh2 ' AE, VADC = l\177rh2 ' AD,3
and therefore
v = \177rh2 (ED _ \177AE_ \177AD) = \177rh2 (ED _ \177ED ) 2 2= \177rh .ED.
The product 2\177rh \337ED expresses the area s of the surfaceobtainedby rotating the side BC. Thus v = sh/3.
A
D
B
C
' A
o
c
F
Figure 118 Figure 119
115. Volumes of spherical sectors. Given a spherical sec-
tor, obtained by rotating a disk sector(AOD Figure 119) about adiameter (EF), we inscribeinto the arc (AD) of the disk sector aregularbrokenline (ABCD), and form a solid of revolution by ro-
tating about the same diameter the polygon (OABCD), boundedby the broken line and by the extreme radii (OA and OD). The
volume of the spherical sector is defined to be the limit to whichthe volume of the solidof revolution tends as the number of sides of
the regular broken line increases indefinitely.116. Theorem. The volume of a spherical sector is equal
to the product of the surfaceareaof its base and a third ofthe radius.
Let the spherical sector be obtained by rotating the disk sectorAOD (Figure 119) about the diameter EF, and let ABCDbe a
99
regular broken line with any number of sides inscribedinto the arc
AD. Denote by V the volume of the solidobtainedby rotating the
polygon OABCD. This volume is the Sum of the volumes obtained.by rotating the triangles OAB, OBC,etc. about the axis EF. Toeach of these volumes,we apply the lemma of \365114 and note that
the altitudes of the trianglesare congruent to the apothem a of theregular brokenline.Thus we have:
a a a
V -- 8AB\177 q- SBC\177 +''' -- S 3,
where we denote by 8AB, 8BC, etc. and by S the areas of surfacesobtainedby rotating sides AB, BC, etc. and the whole brokenlineABCDrespectively.
Imagine now that the number of sides of the brokenline increases
indefinitely. Then the apothem a tends to the radiusR, and the area
S tends to a limit s (see \365110), equal to the lateral surface area of thesphericalfrustum (or spherical segment) formed by rotating the areAD. Thelatter surface is the base of the spherical sector. Thereforethe volume v of the spherical sector is given by the formula:
V ---
Rlimit of V = s--.
3
Notice that this argument remains valid if one or even both radiiof the disksectorcoincide with the axis of revolution.
117. The volume of the ball.Applying the previous result tothe extreme case of a semi-diskrotatedabout its diameter, we obtain
the following corollary.Corollary 1. The volume of a ball is equal to the product of its
surfaceareaand a third of the radius.
Corollary 2. As we have seen \365111,the lateral surface areaof a spherical segment or spherical frustum is given by the formula
2\177rRh where R denotes the radius and h the altitudeof the segment
or frustum. Using this expression for the surface area s of the baseof a sphericalsector,we find:
volume of a spherical sector = 2\177rRh. __R = _2\177rR2h.
3 3
For the entire ball, when the altitudeh is a diameter D = 2R, wehave:
volume of the ball

100 Chapter 3. ROUND SOLIDS
Fromthis,it is evident that volumes of balls have the same ratio asthe cubes of their radii or diameters.
Corollary 3. The surface area and the volume of a ball are equal
to two thirds of the total surface area and the volume respectively ofthe cylinder circumscribedabout this ball.
Indeed, the cylinder circumscribed about a ballhas the altitude
congruent to the diameter of the ball, and the radius of the basecongruent to the radius of the ball. Therefore the total surface area
t and the volume v of this cylinder are respectively:
t - 27rR. 2R + 27rR 2 = 67rR2, and v -- 7rR 2 \3372R = 27rR 3.
2 \1777r_R 3, which coincide with the surfaceThus \177t = 47rR 2 and \365v =
area and the volume of the ball respectively.
118. Remarks. (1) Corollary 3 was proved in the 3rd century
B.C. by Archimedes of Syracuse. Being very fond of this result,
Archimedes requested that when he was dead, it would be inscribed
on his tomb. This request was honored by the Roman general Marcel-lus, whosesoldierkilled Archimedes during the capture of Syracusein 212 B.C. A famous Roman statesman Cicero, who lived in the1st century A.D., describes how he managed to locate Archimedes'forgottengrave by looking for a monument featuring a sphereand a
cylinder, and was even able to read the versecarvedon the tomb.
(2) As a useful exercise, we suggestthe readerprove that the
surface area and the volume of a ball are equal to \177-of the totalsurface and the volume respectivelyof the circumscribed cone, whosegeneratrix is congruent to the diameterof the base. Combining this
proposition with Corollary 3, we can write the following identity,
where Q stands for either surface area or volume:
I\177ball I\177cylinder (\177)cone
4 6 9
(3) The formula for the volume of a ball can be easilyderivedfrom
Cavalieri's principle (\36566). Indeed, place a ball of radius R onto aplane P (Figure 120), and place onto the sameplane the cylinder
whose diameter of the base and altitudeare congruent to 2R (i.e.the cylinder that can be circumscribed about the ball of radius R).Imagine now that from the cylinder, two cones are removed,eachhaving the midpoint of the cylinder's axis for its vertex, and one ofthe cylinder's bases for its base. The remaining solid turns out tohave the same volume as the ball. To show this, draw any section
plane parallel to the planeP, and denote the distance from the center

The ball 101
of the ball to this plane by d, and the radiusof the crosssectionofthe ball by r. Then the area of this crosssectionis equal to \177rr2 --
\177r(/\1772- d2). The cross section of the solidremaining from the cylinderis a ring whose exteriorcirclehas radius /\177 and interior d (sincethe angle between the axisof the cone and its generatrices is 45\370).
Therefore the area Ibf the ring is equal to \177r/\1772 - \177rd2 - 7r(/\177 2 - d2).We see that cross sectionsof both solidsby planes parallel to Phave the same areas, and hencethe solids, according to Cavalieri's
principle, have the samevolume.For the solid remaining from thecylinder, this volume is equalto the volume of the cylinder less twicethe volume of the cone:
1 2
\177rR \177. 2R- 2. \365\177rR \337R = 2\177rR \177- -2\177rR\177 =3 3
which thus expresses the volume of the ball of radius R.
Figure 120
(4) The volume of a ball can alsobe derived by the following
simple (although not quite rigorous)argument. Imaginethat the
entire surface of the ball is partitioned into very small pieces, and
that all points on the contourof eachpieceare connected by radii
to the center of the ball. Thus the ball becomes partitioned intoa large numberof smallsolids.Each of them can be considered(approximately) as a pyramid with the vertex at the center. Thevolume of a pyramid is equal to the product of the area of its baseand a third of the altitude (which can be taken to be the radius R
of the ball). Therefore the volume v of the ball, equal to the sum of

102 Chapter3. ROUND SOLIDS
the volumes of the pyramids, is expressedas:1
where s denotes the sum of the areas of the basesofall the pyramids.
But this sum constitutes the surfaceareaofthe ball,i.e.
v = 4rR 2- R _4rRa'3 3
Thus the volume of the ball can be expressed through its surfacearea. Conversely, the area s of the sphere can be found from the
volume of the ball:
and hences = 4\177rR 2.
(5) In fact the above argument appliesto any part of the ballknown as a solidangle.On the surface of the ball, consider a regionB boundedby a closed curve C, and connect all points of this curve
with the center of the ball by radii. The resultingsurface(it is aconical surface in the general sense of \36592, with the curve C as thedirectfix and the radiias generatrices) bounds the part of the ballcalled a solid anglewith the base B and the vertex at the center.Dividing the base into many small pieces and following the argument
in Remark 4, we concludethat the volume V of the part of the solidangleinsidethe ballof radius R is related to the area S of the baseby the formula: V = SR/3.
EXERCISES
190. Find the geometriclocusof the projections of a given point inspace to planespassingthrough another given point.
191. Find the geometric locusof the centersof the cross sections of
a given ball by planes containinga given line. Consider separately
the cases when the line intersectsthe ball, is tangent to it, or doesnot intersectit.192.Find the geometric locus of the centers of the crosssectionsof a given ball by planes passing through a given point. Considerseparatelythe caseswhen the point lies inside, on the surface, oroutsidethe ball.
193. On the surface of a given ball, find the geometric locus of thetangency points with linesdrawn from a given point outside the balland tangent to the sphere.

2. The b\17711 103
19J. Prove that all segments drawn from a given point outside agiven ball and tangent to it at their endpoint are congruent to eachother.195. The segment connecting the centers of two balls is calledtheirlineofcenters.Prove that if two spheres are tangent to eachother(i.e.have only one common point) then the tangency point liesonthe line of centers (or its extension, if one ball lies inside the other).Derive that tangent spheres have a common tangent plane at theirtangencypoint,and this planeisperpendicularto the line of centers.
196. Prove that two spheres are tangent if and only if their line ofcenters is congruentto the sum or difference of their radii.197. Provethat if in a tetrahedron, the three sums of pairs of op-positeedges are congruent, then the vertices are the centersof four
balls pairwise tangent to each other.198.* Provethat if vertices of a tetrahedron are centers of pairwisetangent balls,then all the six common tangent planes at the pointsof tangency of these pairs of balls pass through the samepoint.199.Find a necessary and sufficient condition for all edgesof a
tetrahedron to be tangent to the same ball.200. A sphere tangent to all faces of a polyhedron or polyhedral
angle is called inscribed into it. Find the geometriclocusof the
centers of spheres inscribed into a given trihedral angle.201. Find the geometric locus of points in space equidistant from
three given points.
202. On a given plane, find the geometric locus of points of tangencyof ballsof a fixed radius r, which are tangent to the planeand to agiven ball of radius a tangent to it.203.* On a given plane, find the geometric locus of the points oftangency of this plane with spheres passing through two given points
outside the plane.
20\177. Prove that any tetrahedron possesses a unique inscribedandunique circumscribed sphere. (A sphere is called circumscribedabout a polyhedron if all of its vertices lie on the sphere.)205.In a trihedral angle all of whose plane angles are right, two
spheres tangent to each other are inscribed. Computethe ratiooftheir radii.
206. Prove that about any regular pyramid, a unique ball can becircumscribed, and its centerlieson the altitude.
207. Prove that into any regular pyramid, a unique ball can beinscribed, and its centerlieson the altitude.
104 Chapter 3. ROUND SOLIDS
208. Computethe planeangle at the vertex of a regular quadrangu-lar pyramid, if the centers of the inscribed and circumscribedballscoincide.209.Compute the radius of the ball circumscribed about a cubewhose side is Im.
210.* Prove that if in a polyhedron, all of whose polyhedral anglesare trihedral, each face can be circumscribed by a circle, then the
polyhedron can be circumscribed by a sphere.211.* Provethat if into a prism, a ball can be inscribed, then thelateralsurface area of the prism is equal to two thirds of the totalsurface area.
;212,.Provethat into a conicalfrustum, a sphere can be inscribedif and only if the sum of the radii of the bases is congruent to the
generatrix.
;215.* Prove that into a conicalfrustum, a sphere can be inscribed ifand only if the altitude is the geometric mean between the diametersof the bases.
2,1,\177. The diameter of M\177rs is twice as small, and of Jupiter is 11timesgreater, than the diameter of Earth. By how many times dothe surfaceareaand the volume of Jupiter exceed those of Mars?2,15. A tall cylindrical vessel with the radius of the base 6 cra ishalf-filled with water. By how much will the water level riseafter aballof radius 3 cm is sunk in the vessel?
2,16. A hollow iron ball of radius 15.5 cm is floating in waterbeinghalf-submersedin it. How thick is the shell, if the specific gravity of
iron is 7.75 g/cvr\1773?
217. Compute the volume and lateral surfaceareaof a conical frus-
tum, whose generatrix is 21 cm, and the radii of the bases are 27 cmand 18cm.218.Given a ball of radius 113 cm, find the distance from the centerto a cross sectionplane,if the ratio of the lateral surface area of thesmallerspherical segment, cut out by the plane, to the lateralsurface
area of the cone, which has the samebaseas the spherical segment
and the vertex at the centerof the ball,is 7: 4.219.Along a diameter of a ball of radius 2 cm, a cylindrical hole of
radius I cm is drilled. Computethe volume of the remaining part ofthe ball.2,20.Computethe volume of the ball inscribed into a cone whosebasehas radiusr = 5 cm, and generatrix is 1 = 13 cm long.221.A disk inscribed into an equilateral triangle. Compute the ratio

2. The ball 105
of the volumes of the solidsobtainedby rotating the disk and triangleabout an altitudeof the triangle.222.Prove that the volume of a polyhedron circumscribed about aballis equal to one third of the product of the radiusofthe balland
the surface area of the polyhedron.223. A ball is tangent to all edges of a regulartetrahedron.Which
of the solids has greater: (a) volume, (b) surfacearea?224\177. Compute the volume and surface area of the solidwhich consists
of all those points in space whose distancefrom (at least one point
inside 'or on the surfaceof) a given cube with the edge a doesnotexceedr.225.*A solid consists of all points in space whosedistancefrom (at
least one point inside or on the boundary of) a given polygon of areas and semiperimeterp doesnotexceed r. Prove that the volume Vand the surfacearea \177qof the solid are given by the formulas:
4 3
V - 2rs + \177rr2p + \365\177rr,S = 2s + 2\177rrp + 4\177rr \177.
226. Prove that the surface area and volume of a ball are equal to 4/9of the totalsurface area and volume respectively of the circumscribedconewhose generatrix is congruent to the diameter of the base.
227.* Prove that the volume of a sphericalsegmentis equal to the
volume of the cylinder, whose basehas the radius congruent to the
altitude of the segment, and whosealtitudeis congruent to the radius
of the ball less a third of the altitudeof the segment, i.e.
where v denotes the volume of the segment,h its altitude, and R theradius of the ball.228.\177Prove that the volume of a spherical frustum is given by the
formula: h3 h
= =T + +where h is the altitude of the frustum, and rl and r2 are the radii ofthe bases.229. Given a polyhedral angle, intersect it with a sphere of radius Rcenteredat the vertex,and show that the area \177qof the part of thesphere inside the angleis proportional to R 2.
Remark. The ratio \177q: /\1772 can be considered as some measureof the polyhedral angle(or,more generally, any solid angle).
106 Chapter 3. ROUNDSOLIDS
230.Compute the measure of the polyhedral angles of the cube.231. Compute the measure of the solid angle at the vertexofa cone
with the generatrix I and altitude h.

Chapter 4
VECTORS AND
FOUNDATIONS
I Algebraicoperationswith vectors
119. Definition of vectors. In physics, somequantities (e.g.distances,volumes, temperatures, or masses) are completely charac-terized by their magnitudes, expressed with respect to a chosenunit
by real numbers. These quantities are called scalars. Someothers
(e.g. velocities, accelerations, or forces) cannot be characterizedonly
by their magnitudes, because they may differ also by their directions.Such quantities are calledvectors.
Figure 121
To represent a vector quantity geometrically,we draw an arrow
connecting two points in space, e.g. A with B (Figure 121). We callit a directed segment with the tail A and head B, and indicate
>
this in writing as AB.
107

108 Chapter4. VECTORS AND FOUNDATIONS
The same vector can be representedby different directed seg-
ments. By definition, two directed segments (A/} and C/\177) rep-
resent the same vector if they are obtained from each other bytranslation (\36572). In other words, the directed segments must have
the same length, lie on the same lineor two parallel lines, and pointtoward the same direction(out of two possible ones). When this isthe case,we write AB = CD and say that the vectorsrepresented
by these directed segments are equal. Note that A/} = C/\177 exactly
when the quadrilateral ABDC is a parallelogram.We will also denote a vector by a single lowercaseletterwith an
arrow over it, e.g. the vector \1777(Figure 121).
120. Addition of vectors. Given two vectors \1777and F, their
sum \1777q-F is defined as follows. Pick any directed segment [4/}
(Figure 122) representing the vector \177Y. Represent the vector F by
the directed segment BC whose tail B coincides with the head of
AB. Then the directed segment AC represents the sum \177+ F.
AC u+v
\177+\177
Figure 122
The sum of vectors thus defined doesnot dependon the choice
of the directed segment representing the vector \1777. Indeed, if an-
other directed segment A'B' is chosento represent \177Y,and respectively>
the directed segment B'C \177(with the tail B \177)represents F, then thequadrilaterals ABB\177A \177and BCC\177B \177are parallelograms. Therefore
the segments AA \177and CC \177are congruent, parallel, and have the samedirection(sincethey are congruent to, parallel to, and have the samedirectionas BB\177), and hence the quadrilateral ACCRA \177is a parallel-
ogram too. Thus the directedsegmentsA\177 and A\177C \177represent thesame vector.

1. Algebraic operations with vectors 109
Addition of vectors is commutative, i.e. the sum doesnot de-
pend on the order of the summands:
for all vectors \177iand \276.
Indeed, represent the vectors by directed segmentsAB and AD with
the same tail A (Figure 123). In the planeof the triangle ABD,
draw lines BC AD and DC AB, and denoteby C their intersection
point. Then ABCD is a parallelogram,and hence DC: \177, BC = \177.
Therefore the diagonal AC of the parallelogramis a directedsegment
representing both ff + \276and \276+ \177.
A \177 B
B' A \177
A \177 B
Figure 123 Figure 124
Addition of vectors is associative, i.e. the sum of three (or
more) vectors does not dependon the order in which the additionsare performed:
(\177l+ \276) + \177 = \276+ (ff + \177) for all vectors \1777, \177l, and \177.
Indeed, represent the vectors \1777, \177Y,and t\177 by directed segments AB,
AC, and AD with the same tail A (Figure 124), and then constructthe parallelepiped ABCDA'B'C'D' all of whose edges are paralleltoAB,AC, or AD. Then the diagonal directed segment AA' represents
the sum \177+ \276+ t\177 regardless of the ordering of the summands or theorderin which the additions are performed. For instance,
AA' = AB + BA' = AB + (BD'+ D'A'): \177i+ (\276 + t\177),
since BD' = AC = \276and D'A' = AD = \177. At the same time,
) ,> ,,,> ) >
AA' = AD' + D'A' = (AB + BD')+ D'A'= (\177i+ \276) +

110 Chapter 4. VECTORS AND FOUNDATIONS
121.Multiplicationof vectorsby scalars. Given a scalar
(i.e. a real number) c\177and a vector \177, one can form a new vectordenoted \177 and called the product of the scalar and the vector.
Namely, represent the vector \1777by any directed segment AB (Fig-ure 125) and apply to it the homothety (see \365\36570-72) with the co-
efficient \177 \177 0 with respect to any center S. Then the resulting
directed segment A'B' represents the vector \1777. In other words,
since the triangles SAB and SA'B\177are similar, the directed segment
A\177B \177representing the vector \177 is parallel to AB (or lies on the sameline),is [\177[ times longer than AB, and has the samedirectionas AB
when c\177is positive, and the opposite direction when c\177is negative.
We will often call vectors \1777and \177 proportional and refer tothe numberc\177as the coefficient of proportionality.
A
B' S \177 B
A'
Figure 125 Figure 126
In the specialcaseof a = 0,theproduct 0ff is represented by
any directed segment SS whose tail and head coincide. The cor-responding vector is calledthe zero vector and is denoted by \177.
Thus
0ff = \177 for every vector if.
Multiplication by scalars is distributive with respect to additionof vectors,i.e. for all vectors \1777and \276and every scalar a we have:
Indeed, let the sidesof the triangle ABC (Figure 126) representrespectively: AB the vector \177, BC the vector \276, and AC their sum
\17774-\276, and let /kA\177B\177C \177be homothetic to /kABC (with respect toany centel S) with the homothety coefficient \177. Then
A'B' = c\1777, B'C' = c\177\276, and A'C' = c\177(\1777+ \276).
Algebraic operations with vectors 111
Since A\177C \177= A'B' + B'C '\177,the distributivity law follows.
Two more properties1ofmultiplicationofvectors by scalars:
(c\177+ \177)\1777= c\1777 + fig, and (c\1773)g = c\177(3g)
follow from the geometric meaning of operations with numbers. In-
deed, let OU = \1777(Figure 127). The infinite line OU can be identified
with the number line (see Book I, \177153) by taking the segment OUfor the unit of lengthand letting the pointsO and U representthe
numbers 0 and I respectively. Then any scalar a is representedon>
this number line by a unique point A such that OA = c\177OU. Fur-
thermore, addition of vectors on the line and their multiplicationby scalars is expressed as addition and multiplication of the corre:sponding numbers. For example, if B is another point on the linesuch that OB = \177OU, then the vector sum OA + OB correspondsto
> >
the number a+/\177 on the number line, i.e. aOU+\177OU = (a+\177)OU.>
Similarly, multiplying by a scalar a the vectorOB (corresponding to
\177 on the number line) we obtain a new vectorcorrespondingto the
product c\177/\177of the numbers, i.e. a(/\177OU)= (a/\177)OU.
Examples. (1) If a vector \1777is represented by a directed segmentA/}, then 'the oppositedirected segment BA represents the vector(-1)\177,also denoted simply by -\1777. Note that opposite vectors
add up to 0. This is obvious from AB+BA- AA-- 0\177 but also
follows formally from the distributivity law:
(-1 + 1)\177: (--1)\177, + 1\177= -g, + 5.
(2) If vectors\1777and F are represented by the directed segmentsAB and AC with a common tail, then the directedsegment BC
connecting the heads represents the difference F-\1777 (because AB +
BC' = AC').In applicationsof vectoralgebrato geometry, it is often conve-
nient to represent all vectorsby directed segments with a commontail, called the origin, which can be chosen arbitrarily. Once anorigin O is chosen,eachpoint A in space becomes represented by
a unique vector,OA, called the radius-vector of the point A with
respect to the origin O.
XThey are called: distributivity with respect to addition of scalars, andassociativity with respect to multiplication by scalars.

112 Chapter 4. VECTORSAND FOUNDATIONS
122. Problem. Compute the radius-vector \177 of the barycenter
of a triangle ABC (Figure128),given the radius-vectors 5, \177, and 5
of its vertices.
Recall that the barycenteris the intersection point of the medi-ans. Denote A' the midpointof the sideBC, and on the median
AA \177mark the point M which divides the medianin the proportion
AM' MA\177= 2' 1. We have: A/\177 = \177- 5, B\177 = 5- \177, and hence
AA \177= AB + 2 2
Therefore
> \177 > \177 1 1 _\177
OM-OA+AM=OA+-2AA \177 a'+ (\177'+ \276- 2\177') \177(a + g+ c-*)
Clearly, the same result remains true for each of the other two me-dians. Thusthe headofthe radius-vector
1
,
lies on all the three mediansand thus coincides with the barycenter.As a by-product,we have obtained a new proof of the concurrencytheorem(BookI, \365142): the three medians of a triangle meet at thepoint dividing each of them in the proportion 2: 1 counting from thevertex.
Figure 127 Figure 128
c
123. The dot product. Given two vectors \276 and F, their dot
product if. F (alsoknown as scalar product) is a number definedas the productof the lengths of the vectors and the cosine of theanglebetweentheirdirections.Thus, if the vectors are represented
by the directedsegmentsOUand OV (Figure 129), then
\276. \276= OU . OV . cosXVOU.

1. Algebraic operationswith vectors113
In particular, the dot product of a vectorwith itself is equal to thesquare of the veetor'slength:
g.ff= g2, or ffl=x/-\177'ff.
If 0(g, \276) denotes the angle between the directions of two non-zerovectors,then
cos0(g,3)= g 3'Thus, the dot product operation captures information about dis-taneesand angles.
v
\1777 -\177 U0
0
Figure 129 Figure 130
Now let us define the signed projection of any vector g to thedirection of a unit vector 3, i.e. assuming that 13 = 1. Let di-
rected segmentsAB and OV (Figure 130) represent the two vectors.Considerprojectionsofthe points A and B to the line OV. Forthis,draw through A and B the planes P and Q perpendicularto the line
OV until they intersect it at the points A \177and B \177. Identifying the
line OV with the number line, we represent the positions of thesepoints by numbersc\177and 3, and introduce the signed projection astheir difference 3 - c\177. It does not depend on the choice of directed
segments representing the vectors because it is equal to their dot
product: 3- c\177= gcos0(g, 3). Indeed, draw through the point A
the line A6' OU, and extend it to the intersectionpointC with the
plane Q. Then AC = A'B \177(as segments of parallel lines between twoparallel planes),and \177BAO = 0(\177, 3). The sign of 3 - c\177is positive
) >
if the direction of A\177B \177agrees with the direction of OV, i.e. when-ever \177BA\177' is acute, and negative otherwise, i.e. when the angleisobtuse.We find therefore that 3 - c\177 = AB \337cosXBA6' = \177. 3.
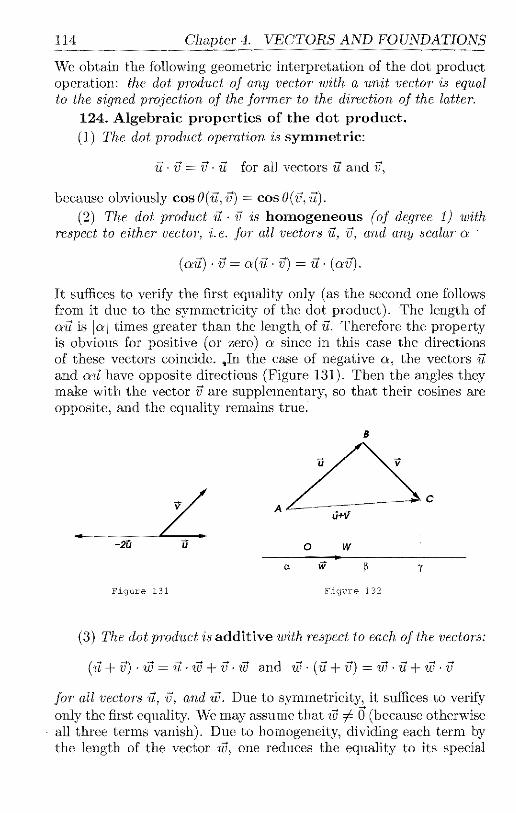
114 Chapter 4. VECTORS AND FOUNDATIONS
We obtain the following geometric interpretation of the dot productoperation:the dot product of any vector with a unit vector is equalto the signedprojectionof the former to the direction of the latter.
124. Algebraicpropertiesofthe dot product.
(1) The dot product operation is symmetric:
\1777. \276= \276. \1777 for all vectors \1777and \276,
because obviously cos 0(\1777, \276) = cos 0(\276, \1777).
(2) The dot product \1777. \177 is homogeneous (of degree 1) with
respect to either vector, i.e. for all vectors3, \276, and any scalar a \177
It suffices to verify the first equality only (as the second one followsfrom it due to the symmetricity of the dot product). The length of
c\1777 is c\177] times greater than the length. of \1777. Therefore the property
is obvious for positive (or zero) c\177since in this case the directionsof these vectorscoincide.gin the case of negative c\177, the vectors \1777
and c\1777 have opposite directions (Figure 131). Then the anglesthey
make with the vector \276are supplementary, so that their cosines areopposite,and the equality remains true\177
B
W
Figure 131 Figure 132
(3) The dotproductisadditivewith respect to each of the vectors:
(\177+\177)-\177-\177.\177+\177.\177 and \177.(\177+\177)=\177.\177+\177.\177
for all vectors \1777, \177F, and \177. Due to symmetricity, it suffices to verify
only the first equality. We may assumethat \177 \177 \177(because otherwise
al] three terms vanish). Due to homogeneity, dividing each term bythe length of the vector \177, one reduces the equa]ity to its special

Algebraicoperationswith vectors 115
case when tU = 1. Let ABO (Figure 132) be a triangle such that
AB = \177> BO= \276, and hence AO= \1777+\276. Denote byA', B', and,O' the projections of the points A, B, and O to the line of the unit
>
directed segment OW = tU. Considering this line as the number line,representthe projectionpointsby numbers c\177, \177, and 7. Then
and
Since (/S - a) + (7 -/S) = '7 - a, the requiredequality holds.
125. Examples. Some applications of the dot productoperation
are based on the simplicity of its algebraicproperties.(1)Perpendicular vectors have zero dot product because cos 90\370=
0. Therefore, if we denote by ff and \276the legs AB and BC of a righttriangleABC, then its hypotenuse AC is ff + \276, and the square ofits length is computedas follows:
since \1777- \276 = \276. \1777= 0. Thus AC 2 = AB2 + BC 2, and so we havere-provedthe Pythagoreantheoremonceagain.
(2) More generally, given any triangle ABC, put \276= AB, \276= AC
and compute:
2 = (v- 4). (v- v.v_ v.4_ 4.v+= \1777. \17774- \276. \276- 2\1777. g = AB 2 4- AO2 - 2AB. AO. cos ZBAO.
This is the law of cosines (Book I, \365205).
EXERCISES
232. Prove that for every closedbrokenlineABODE,
AB + BO + ... + DE + EA = 6.
233. Prove that if the sum of three unit vectors is equal to 6, then
the angle between each pair of these vectorsis equalto 120\370.
234. Prove that if four unit vectors 15;ingin the sameplaneadd up
to 6 then they form two pairs of oppositevectors.Doesthis remain
true if the vectors do not have to lie in the same plane?
235.* Let ABODE be a regularpolygon with the center O. Prove
thatOA + OB+... + OE = O.

116 Chapter 4. VECTORSAND FOUNDATIONS
236. Along three circles lying in the sameplane,vertices of a triangle
are moving clockwise with theequalconstantangular velocities. Find
out how the baryccntcr of the triangleis moving.
237. Prove that if AA \177is a median in a triangle ABC, then
nn'= (hA +
238. Prove that from segmentscongruentto the medians of a given
triangle, another triangle canbe formed.
239. Sides of one triangle are parallelto the medians of another.
Prove that the medians of the latter triangle are parallel to the sidesof the former one.240. From medians of a given triangle, a new triangle is formed,and from its medians, yet another triangle is formed. Provethat thethird triangleis similar to the first one, and find the coefficient of
similarity.
241. Midpoints of AB and CD, and of BC and DE are connected
by two segments, whosemidpointsare alsoconnected.Prove that
the resulting segment is parallel to AE and congruent to \254AE.
242. Prove that a point X lieson the line AB if and only if for some
scalar c\177and any origin O the radius-vectors satisfy the equation:
OX = \177OA + (1 - \177)OB.
243. Prove that if the vectors ff + \276 and \177- \276 are perpendicular,
then Iff = \276.
244. For arbitrary vectors \177 and \177, verify the equality:
and derive the theorem: the sum of the squares of the diagonals of aparallelogramis equal to the sum of the squares of the sides.245. Prove that for every triangle ABC and every point X in space,
XA . BC + XB . CA + XC . AB = O.
246.* For four arbitrary points A, B, C, and D in space, prove
that if the lines AC and BD are perpendicular,then AB 2 + CD 2 =BC2 + DA 2, and vice versa.
24 7. Given a quadrilateralwith perpendicular diagonals, show thatevery quadrilateral, whose sidesare respectively congruent to the
sides of the given one, has perpendiculardiagonals.248.A regular triangle ABC is inscribed into a circleof radiusR.Provethat for every point X of this circle, XA 2 +XB2+XC 9\177= 6R 2.
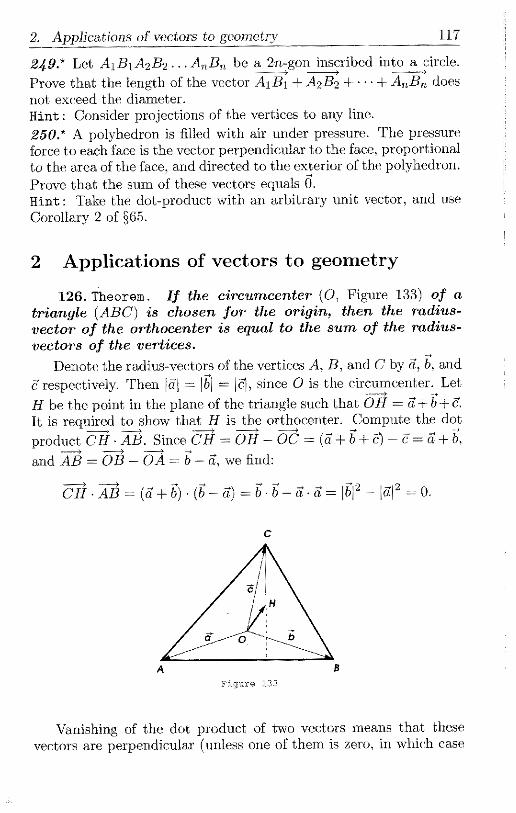
2. Applications of vectors to geometry 117
249.*Let A\177B\177A2B2... A\177B\177 be a 2n-gon inscribed into a circle.Provethat the length of the vector A\177B\177 + A2B2 + \337\"+ A\177B\177 does
not exceed the diameter.Hint' Consider projectionsof the verticesto any line.
250.* A polyhedron is filled with air under pressure. The pressure
force to each face is the vectorperpendicularto the face, proportional
to the area of the face,anddirectedto the exterior of the polyhedron.
Prove that the sumof thesevectors equals 0.
Hint' Take the dot-product with an arbitrary unit vector,and useCorollary2 of \36565.
2 Applications of vectors to geometry
126.Theorem. If the circumcenter (O, Figure 133) of atriangle (ABC) is chosen for the origin, then the radius-vector of the orthocenteris equal to the sum of the radius-vectors of the vertices.
Denote the radius-vectors of the vertices A, B, and C by 5, \177,and
5respectively. Then 5 = b[ = c\177, since O is the circumcenter. LetH be the point in the plane of the triangle such that OH = 5+ \177+ cZ
It is required to show that H is the orthocenter. Compute the dot
productCH-AB. SinceCH=OH-OC=(5+b+c\177-5=5+\177,and AB = OB- OA = b- 5, we find:
CH.AB:(\177+\177').(b-g):\177.\177'-\177.a:\177'2_ g2=O '
Figure 133
Vanishing of the dot product of two vectors means that thesevectors are perpendicular (unlessoneof themis zero, in which case

118 Chapter 4. VECTORS AND FOUNDATIONS
the angle is, strictly speaking, ill-defined). \177,Ve conclude that the line
CH is perpendicular to AB (unless H and C coincide), i.e. (in eithercase)the point H lies on the altitude dropped from the vertex C tothe side AB, or on the extensionof this altitude. Since the same
applies to each of the other two altitudes, it follows that the threealtitudes, or theirextensions, pass through the point H.
Corollaries. (1) We have obtained a new proof of the theorem(BookI, \177141)' Altitudes of a triangle are concurrent.
(2) In every triangle, the circumcenter O, barycenter \177I, and
orthocenter H are collinear. More precisely,M divides the segment
OH in the proportion OM \337MH -- 1 \3372. Indeed, according to \177122\177
we have:> 1 1 >
= + g + : OH.Remarks. (1) The segment containing the circumcenter, barycen-
ter, and orthocenter is called Euler\177s line of the triangle (seealsoBookI, Exercises 226-228).
(2) In the previous theo.}'em,operations with vectors allow one toformulate new results (andre-proveold ones) about familiar notions
of plane geometry. In the nextexample, vectors turn out to be usefulalthough the formulation of the problem does not involve any vectorsat all. In such situations, in order to apply vector algebra, points of
interest can be represented by their radius-vectors. If it is unclearfrom the context which of the given points should play the role of
the origin, it is advisable (althoughnot necessary) to avoid makingany artificial choice. Instead,one can chose an arbitrary point notmentioned in the problem-- the resultingconclusionwill not dependon this choice.
127. Problem. Given a triangle ABC (Figure 134), a new trian-gleA\177B\177C \177is drawn in such a way that A \177is centrally symmetric toA with respect to the center B, B \177is centrally symmetric to B with
respect to the center C, C \177is centrally symmetric to C with respect
to the center A, and then the triangle ABC is erased. Reconstruct
/kABC from/kA\177B\177C\177 by straightedge and compass.
Pick an arbitrary point O as the origin,and denote by 5, c\177, g,
etc. the radius-vectors of the points A, A \177, B, etc. If two pointsare centrally symmetricwith respect to a center\177 then the radius-
vector of the center is equalto the average of the radius-vectors ofthe points. Therefore\177 fi'om the hypotheses of the problem, we have:
2 (a'+a')' 2

2. Applications of vectors \177o geometry
Assuming that 2, \177, and c' areffiven, solve this system of equationsfor 5, \177,and 5. For this, replace b in the 2nd equationby its expression
from the 1st, and substitute the resultingexpressionfor 5 into the
3rd equation. We obtain:
Therefore,1 1\177 1\177 2 4\177
75=1\177+ g;+ or 5-- + \177+
>
The directed segment OA representing the last vectorexpressionisnot hard to construct by straightedge and compass, startin>g from
given directed segments a' - OA', U - OB', and \177 -- OC( Thevertices B and C of AABC' canbeconstructed using the expressions:
1\177+ \177+ and 5= + + .
Figure 134
128. The center of mass. By a material pointwe will mean a .
point in space equipped with a mass, which can be any real number.Unless the oppositeis specified, we will assume all masses positive?The following notion is borrowed from physics.
Given a system of n material points A1, A2,..., An of massesml, m2,..., ran, theircenterofmass(or barycenter) is the ma-terial point whose massm is equal to the total mass of the system:
m=ml +m2+...+mn,2When both positive and negative masses occur,we refer to the latter ones as
pseudo-masses.
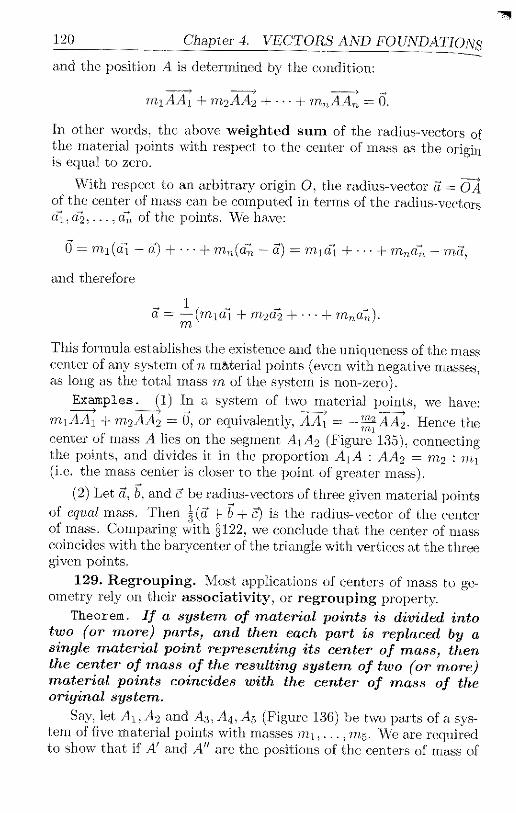
120 Chapter4. VECTORS AND FOUNDATIONs
and the position A is determined by the condition:
m\177AA\177 + m\177AA\177 + ... 4- m\177AA\177 - 6'.
In other words, the above weighted sum of the radius-vectors ofthe materialpoints with respect to the center of mass as the origin
is equal to zero.
With respect to an arbitrary originO, the radius-vector \177
of the center of mass can be computedin terms of the radius-vectors4, \177,...,a\177, of the points. \177Ve have:
and therefore
1+ +... +
This formula establishes the existence and the uniqueness of the masscenterof any system of n m\177terial points (even with negative masses,as long as the total mass m of the system is non-zero).
Examples. (1) In a system of two material points, we have:m\177AA\177 + m2AA2 = 0, or equivalently, AA\177 - m2 AA2. Hence thecenterof massA lies on the segment A\177A2 (Figure 135), connecting
the points, and divides it in the proportionA\177A: AA2: m2: m\177
(i.e. the mass center is closer to the point ofgreatermass).(2)Let if, \177,and \177'be radius-vectors of three given material points1
of equalmass. Then g(ff + \177+ c-) is the radius-vector of the centerof mass. Comparingwith \177122, we conclude that the center of masscoincideswith the barycenter of the triangle with vertices at the threegiven points.
129. Regrouping. Most applications of centers of massto ge-
ometry rely on their associativity, or regrouping property.Theorem.If a systemofmaterialpoints is divided into
two (or more) parts, and then eachpart is replaced by a
\177single material point representing its center of mass, thenthe centerofmassof the resulting system of two (or more)material points coincideswith the center of mass of theoriginal system.
Say, let A\177, A2 and A3, A4, A5 (Figure 136) be two parts of a sys-tem of five material points with masses m\177,...,m\177. We are required
to show that if A \177and A \177are the positions of the centers of mass of
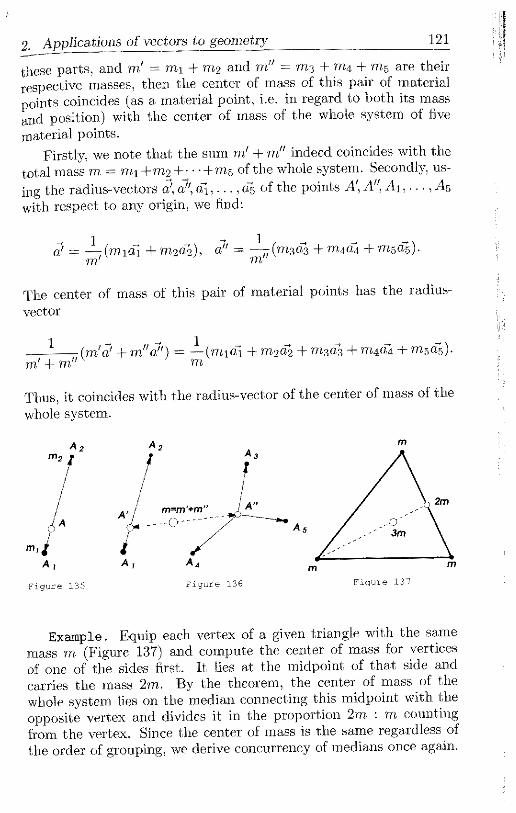
2. Applications of vectors to geometry 121
theseparts, and m' -- ml + m2 and m\177'- m3 + m4 + m5 are theirrespectivemasses, then the center of mass of this pair of materialpoints coincides (as a material point, i.e. in regard to both its mass
and position) with the center of mass of the whole system of five
material points.
Firstly, we note that the summ\177+ ra \177indeed coincides with thetotal mass m = ral+ra2+. \337\337+ms of the whole system. Secondly,us-ing the radius-vectors a \177,c\177\177,\177,..., a5 of the points A \177,A \177,A\177,.. A5
with respect to any origin, we find:
+ J' = --(\177---
1
The center of mass of this pair of material points has the radius-vector
Thus, it coincideswith the radius-vector of the center of mass of thewhole system.
A2 A2 rn
rn-rn '+m '_'_ _
m1\177 _
A \177 A \177 A4 rn rn
Figure 135 Figure 136 Figure 137
Example. Equip each vertex of a given triangle with the same
mass m (Figure 137) and computethe centerof mass for vertices
of one of the sides first. It lies at the midpoint of that side andcarries the mass2m. By the theorem, the center of mass of thewhole system lies on the median connecting this midpoint with theoppositevertexand divides it in the proportion 2m: m countingfrom the vertex. Since the center of mass is the sameregardless of
the order of grouping, we derive concurrencyofmediansonceagain.
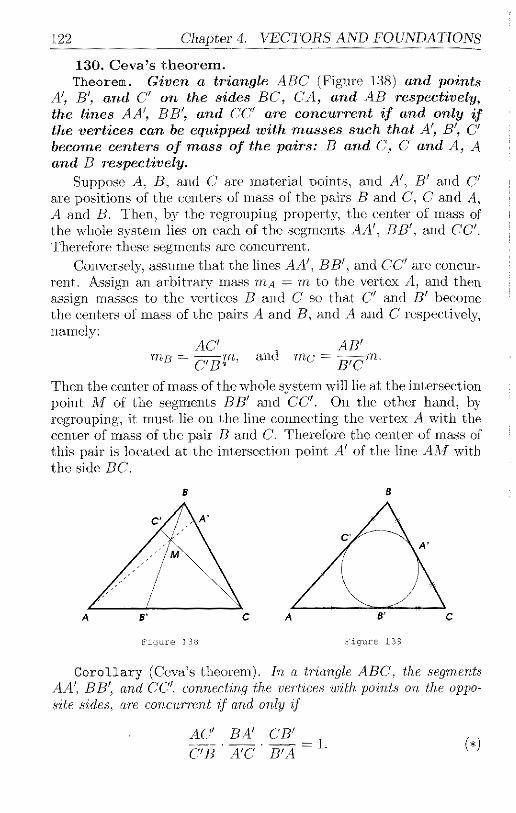
122 Chapter 4. VECTORS AND FOUNDATIONS
130. Ceva's theorem.Theorem. Given a triangle ABC (Figure 138) and points
A', B \177, and C' on the sides BC, CA, and AB respectively,
the lines AA \177, BB \177, and CC \177are concurrent if and only ifthe vertices can be equipped with masses such that A \177,B \177,C \177
become centers of mass of the pairs: B and C, C andA, A
and B respectively.
Suppose A, B, and C are material points, and A
are positions of the centersof mass of the pairs ]3 and C, C and A,
A and ]3. Then, by the regrouping property, the centerof mass of
the whole system lies on each of the segmentsAA \177,BB \177,and CC \177.
Therefore these segments are concurrent.
Conversely, assume that the linesAA \177,BB \177,and CC \177are concur-
rent. Assign an arbitrary mass \177A = \177 to the vertex A, and thenassign massesto the vertices ]3 and C so that C \177and B \177become
the centers of mass of the pairsA and ]3, and A and C respectively,namely:
AC \177 AB \177
mB -- C,B?, and
Then the centerofmassofthe whole system will lie at the intersectionpoint M of the segments BB \177and CC \177. On the other hand, byregrouping, it must lie on the lineconnectingthe vertexA with the
center of mass of the pair ]3 and C. Therefore the center of mass of
this pair is located at the intersection point A' of the line AM withthe side
B B
A B' C A B' C
Figure 138 Figure 139
Corollary (Ceva's theorem). In a triangleABC, the segments
AA \177,BB \177,and CC \177,connecting the vertices with points on the oppo-site sides,are concurrent if and only if
AC' BA' CB'-i. (,)C'B A'C B'A

2. Applications of vectors to geometry 123
Indeed,when the lines are concurrent, the equality becomes obviouswhen rewrittenin terms of the masses:
mB mc mA
mA mB mc--1.
Conversely, the relation (,) means that if one assigns masses as inthe proofof the theorem,i.e. sothat mB\337 mA = AC \177' CtB and
mc' mA = AB\177' BtC, then the proportion mc' mB= BAt \337ArC
holds too. Therefore all three points Ct, B t, and A t are the centersof mass of the corresponding pairs of vertices. Now the concurrency
property is guaranteed by the theorem.Problem. In a triangle ABC (Figure 139), let A', B t,
denote points of tangency of the inscribedcirclewith the sides.
that the lines AA t, BB t, and CC t are concurrent.
Solut\361on 1. We have: AB t =ACt, BC t = BA \177,and CA t =
CB t (as tangent segments drawn from the verticesto the samecircle).Therefore the relation (,) holds true, and the concurrencyfollows
from the corollary.
Solut\361on 2. Assigning masses mA -- 1/AB t -- 1/AC t, mB -1/BCt -- 1/BA', and mc= 1/CA t= 1/CB t, we make A', B', and
C \177the centers of mass of the corresponding pairs of vertices,and
therefore the concurrency follows from the theorem.131. Menelaus\177theorem.
Lemma. Three points A1, A2, and A3 are collinear (i.e. lieon the same line)if and onlyif they can be equipped with non-zero pseudo-masses ml, m2, and m3 (they are allowed thereforeto have different signs) such that
and C t
Prove
ml -F m2 -F m3 - 0, and m1OA1 -F m2OA2 + m3OA3 - 0.
Ifthepointsarecollinear, then one can make the middle one (letitbecalled A3) the center of mass of the pointsA1 and A2 by assigningtheir masses according to the proportionm2 ' ml = A\177A3 ' A3A2.
Then, for any origin O, wehave:m\177OA\177+m20A2-(ml+m2)OA3 =
Ij, i.e. it suffices to put m3 = -m\177 - m2.
Conversely, if the required pseudo-massesexist,onemay assume
(changing, if necessary, the signs of all three) that oneof them (say,
m3) is negative while the other two are positive. Then m3 = -m\177 -
m2, and the relation mlOA1 + m2OA2 - (m\177 + m2)OA3 = 0 meansthat A3 is the position of the center of mass of the pair of materialpoints A1 and A2. Thus Aa lies on the segmentAiA2.
124 Chapter 4. VECTORS AND FOUNDATIONS
Corollary (Menelaus'theorem.)Any points A; B', and C' (Fig-ure 140)lying on the sides BC, CA, and AB respectively of AABC,
or on their extensions, are collinear,if and only if
AC' BA' CB'
C'B A'C B'A-1.
Remark. This relation looks identical to (.), and it may seem puz-
zling how the same relation can characterizetriplesof points A', B',
C' satisfying two different geometric conditions. In fact in Menelaus'theorem (seeFigure140),either one or all three of the points must lieonextensionsof the sides, so that the same relation is appliedto two
mutually exclusive geometric situations. Furthermore, let us identify
the sides of/\177ABC with number lines by directingthemas shown on
Figure 140, i.e. the side AB from A to B, BC from B to C, and CA
from C to A. Then the segmentsAC', C'B, BA', etc. in the aboverelation can be understood as signed quantities, i.e. real numberswhose absolutevalues are equal to the lengths of the segments,and
the signs are determined \177by the directions of the vectors AC', C'B,BA', etc. on the respectivenumber lines. With this convention, thecorrect form of the relation in Menelaus' theorem is:
AC' BA' CB'C'B A'C ' \177'A - -1'
(**)
thereby differing from the relation in Ceva's theorem by the sigm a
To prove Menelaus' theorem in this improved formulation,notethat we can always assign to the vertices A, B, and C somereal
numbers a, b, and c so that C' (resp. B') becomes the center of
mass of the pair of points A and B (resp. C and A) equipped withpseudo-massesa and -b (resp. c and -a). Namely,it suffices to take:
-b \337a = AC' \337C'B and -a \337c = CB' \337B'A. Then the relation (**)means that BA' \337A'C = -c \337b, i.e. A' is the center of mass of the
pair B and C equippedwith pseudo-masses b and -c respectively.> > > > > >
Thus, we have: (a-O)OC' = aOA-OOB, (c-a)OB' : cOC-aOA,
and (b - c)OA' = bOB - cOC.Adding these equalities, and puttingmA -- b - c, mB -- c - a, mc= a - b, we find:
mAOA' + mBOB' + mcOC\"= 0, mA -\177m B -\177inC' -- O.
3In Ceva's theorem, it is also possible to apply the sign convention and considerpoints on the extensionsof the sides. Then the relation (*) remains the correctcriterion for the three lines to be concurrent (or parallel). When (*) holds, an
even number (i.e. 0 or 2) of the points lie on the extensionsof the sides.

2. Applications of vectors \177o Keometry 125
Therefore the points A', B', and C' are collinear.
Conversely, for any points C' and B' in the interioror on the
extensions of the sides AB and CA, we can find a point A' on theline BC suchthat the relation(**)holdstrue. Then, according to
the previous argument, points A', B', and C' are collinear, i.e. point
A' must coincide with the point of intersectionofthe lines B'C' and
BC. Thus the relation (**) holds true for any three collinear pointson the sidesofa triangle or on their extensions.
B
A C B'
B
A C
C'
Figure 140
132. The method ofbarycentersdemystified.This method,
developed and applied in \365\365128-131 to some problems of plane ge-ometry, can be explained using geometry of vectors in space.
Figure 141
Position the plane P in space in such a way (Figure 141) that itmisses the point O chosenfor the origin. Then, to each point A on
the plane, one can associate a linein space passing through the origin,namely the line OA. When the point comes equipped with a mass(orpseudo-mass)ra, we associate to this material point on the planethe vector 5-' raOA in space. We claim that this way, the center of
mass of a system of materialpoints on the plane corresponds to thesum of the vectors associatedto them in space. Indeed, if A denotesthe center of massof a system of n material points A\177, ..., An inthe plane of masses m\177, ..., rr\177n, then the total mass is equal to

126 Chapter4. VECTORS AND FOUNDATIONS
ra = ral + ..- + ran, and the corresponding vector in space is--4 --'\177
5 = raOM: ralOA\177 +... + ra\177OA\177 = a\177 + ... + a\177.
In particular, the regrouping property of the centerof massfollows
from associativity of the addition of vectors.
/?
Figure 142
Remark. The above method of associating linespassingthrough
the origin to points of the plane P turns out to be fruitful and leadsto the so-calledprojectiregeometry.In projectire geometry, be-
side ordinary points of the planeP, there exist \"points at infinity.\"
They correspond to lines pgssingthrough the origin and parallel toP (e.g. EF on Figure142).Moreover, lines on the plane P (e.g.AB or CD) correspondto planes ((2 or _R) passing through the ori-gin. When A/\177IICD, the lines do not intersect on the planeP, but
in projective geometry they intersect \"at infinity,\" namely at the\"point\" corresponding to the line EF of intersection of the planes(\177
and R. Thus, the optical illusion that two parallel rails of a railroadtrack meet at the line of the horizon becomes reality in projectlye
geometry.
EXERCISES
251. In the plane,let A,\177B, C, D, E be arbitrary points. Construct> > > >
the point 0 such that OA + OB+ OC= OD + OE.
252.* In a circle,threenon-intersectingchordsAB,CD,and EF are
given, each congruent to the radiusof the circle,and the midpoints
of the segments BC, DE, and FA are connected.Prove that the
resulting triangle is equilateral.253. Provethat if a polygon has several axes of symmetry, then they
are concurrent.
25s4. Prove that the three segmentsconnectingthe midpointsofop-positeedgesofa tetrahedron bisect each other.
255. Prove that bisectors of exterioranglesofa triangle meet exten-
sions of the opposite sides at collinearpoints.

2. Applications of vectors to geometry 127
25(7. Formulate and prove an analogueof the previous problem for
bisectors of one exterior and two interior angles of a triangle.
257. Prove that if vertices of a triangle are equipped with massesproportionalto the opposite sides, then the center of mass coincideswith the incenter.
258.* Prove that tangents to a circleat the vertices of an inscribedtriangle intersect extensionsof the oppositesidesat collinear points.
259. In the plane, three circles of different radii are given outsideeach other, and for each pair, the external common tangents aredrawn up to their intersection point. Prove that the three intersec-
tion points are collinear.
2(70. In the plane, three pairwise disjoint circles are given outsideeach other, and for each pair, the intersection point of internal com-mon tangents is constructed. Prove that the three lines, connectingeachintersection point with the center of the remaining circle,areconcurrent.
2(71. Prove the following reformulation of Ceva's theorem: On thesidesBC, CA, and AB of /kABC (Figure 138), three points A/,
B \177,and C \177are chosen. Prove that the lines AA \177,BB \177,and CC \177are
concurrent if and only if
sin ZACC'sin ZC'CB
sinZBAA \177
sin \177A\177AC
sin \177C'BB \177
sin \177B\177BA
=1.
262. Give a similar reformulation of Menelaus'theorem.263. Two triangles ABC and A\177B\177C\177 are given in the plane, andthrough the verticesof each of them, lines parallel to the respectivesidesof the other are drawn. Prove that if the lines of one of thetriplesare concurrent, then the lines of the other tripleareconcurrent
too.
26\177.* Prove Pappus' theorem: If points A, B, C lie on one line,and A \177,B \177,C \177on another, then the three intersection points of thelinesAB \177and BA \177,BC \177and CB \177,AC \177and CA \177,are collinear.
tt\361nt: Reduce to the case of parallellinesusing projective geometry,
i.e. by restating the problem about pointsand linesin the plane in
terms of corresponding lines and planesin space.
265.* Prove Desargues' theorem: In the plane, if the lines AA \177,
BB\177, and CC \177connecting vertices of two triangles ABC and A\177B\177C \177
are concurrent, then the three intersection points of each pair ofextended respective sides (i.e. AB and A\177B \177,BC and B\177C \177,and CA
and C\177A \177)are collinear, and vice versa.H\361nt: Represent the diagram as a projection from space.
128 Chapter 4. VECTORS AND FOUNDATIONS
3 Foundations of geometry
133.Euclid\177s \"Elements.\" Many theorems of geometry canbe not only proved by way of reasoning, but also confirmedby direct
observation. This intuitive, visual nature of geometry allows oneto discover many geometric facts long before they can be rigorously
justified. The ancient Egyptians (at about 2000 B.C.) were using
this empirical method of establishing the simplest geometricresultsneededfor practical purposes. However, self-evidence of conclusions,derived by observing diagrams, can be deceptive, especially when thediagramsbecomecomplicated.
The ancient Greeks, who inherited elements of mathematical cul-
ture from the Egyptians, generalized their observationsand devel-
oped more reliable forms of reasoning. All geometric results were
now confirmed by flawlesslogicalarguments relying only on explic-itly made assumptions about diagrams,thus rendering the conclu-
sions independent of accidental detailsofspecificdiagrams. Around
300 B.C., a Greek geometer Euclid gave a systematicexposition of
basic geometric knowledge\177of his time in a seriesof 13booksunder
the common title Elements. This work laid down foundations of the
mathematical method and remains, even by the standards of modernscience, a quite satisfactory accountofelementarygeometry.
Euclid's exposition begins with definitions, postulates, andcommon notions (alsoknown as axioms). Here are the first sevenof the 23 definitions (in the English translation [1]):1. A point is that which has no part.2. A line is a breadthless length.$. The extremities of a line arepoints.4- A straight line is a line that lies evenly with the points on itself.5. A surface is that which has length and breadth only.
6: The extremities of a surface are lines.7. A plane surface is a surface which lies evenly with the straight
lines on itself.Then there follow definitions of angles, circles, polygons, triangles,quadrilaterals, paralleland perpendicularlines,etc.
There are five %ommon notions\" about arbitrary quantities:1. Things which are equal to the same thing are also equal to one
another.
2. If equals be added to equals, the wholes are equal.
$. If equals be subtractedfrom equals, then the remaindersare equal.
4. Things which coincide with one another are equal to one another.5. The whole is greater than the part.
3. \337Foundations of geometry 129
The postulates bear specificallygeometriccontent:Let the following be postulated:i. To draw a straightlinefrom any point to any point.2. To produce a finite straight line continuously in a straight line.$. To describe a circle with any center and distance.4. That all right angles are equal I to one another.5. That, if a straight line falling onto two straight lines make theinterior angles on the same side lessthan two right angles, the two
straight lines, if producedindefinitely, meet on that side on which arethe angles less than the two right angles.
Then Euclidproceedsto stating geometric propositions, one
after another, and deriving them logically, using the definitions, ax-
ioms, postulates and previously proved propositions (pretty muchthe way we do it in this book).5
134.Non-Euclideangeometry.From the modern point of
view, logical foundations of elementarygeometry, in the form weinherited them from Euclid, are not free of defects.
One is the failure to acknowledge explicitly a number of implicitassumptionsusedin our arguments. For instance, the definition ofcongruent figures assumesthe possibility of moving geometric fig-ures in space as solidobjects.
Another one is the vague character of basic definitions,which do
not really tell us what points, lines,and planesare, but merely ex-
plain in what direction the everyday meaning of these words becomesidealized in mathematics.6
Historically, the need for more solid logicalfoundations of geom-etry emerged as a result of the discoveryin the early 19thcentury
of non-Euclidean geometries, i.e. consistent geometric theorieswhere Euclid's5th postulatedoesnot hold true. As it was dis-cussed in BookI, \365\36575-78, the 5th postulate is equivalent to theparallel postulate: Through every point not lying on a given line, aline parallel to the given one can be drawn, and sucha line is unique.
4 congruent in our terminology
5A notable distinction however is that Euclid's discourse is more conservativethan ours: he does not allow himself even to talk about a certaindiagram if it wasnot shown beforehand how to construct this diagram. This explains the role andscopeof the first three postulates, which merely decree that it is possibleto draw
a line through two points, to extenda segment, and to draw a circle of arbitrary
center and radius.
6Historians still argue about the role attributed by Euclid to his first defini-
tions. E.g. according to [3],they originally formed an unstructured successionofsentences,which became separated and numbered only in later translations.

130 Chapter 4. VECTORS AND FOUNDATIONS
In 1820 1830, two geometers: Russian Nikolai Lobachevskyand
Hungarian Janos Bolyai, showed independently that there existge\177
ometric theories where the parallel postulate is replacedby its nega-
tion, and which are just as rich in content as the classical Euclideangeometry. They arrived at this resultby trying (as did many othersbefore them) to derivethe 5th postulatefrom the remaining ones,but were the first to realizethat such derivation is impossible.
135. Hilbert's axioms. In 1899,David Hilbert gave the first
fully rigorous account [2] of foundations of elementary geometry,bothEuclideanand non-Euclidean.
It is inevitable, that by attempting to accurately define all con-cepts in terms of previously defined ones, and those in terms of even
earlier defined concepts, one will sooner or later run out of those
;'previously defined,\" and end up with a collection of undefinablenotions, whose meaning can be conveyed only intuitively.
Hilbert chooses points, lines, and planes to be the undefinable
notions of geometry. Furthermore, he assumes that thesegeometric
objects can be (or not) in ?train relations with each other, namely:
a point can lie on a line,a point can lie on a plane, a line can lie on
a plane, a point can lie between two other points lying on a givenline, (note that using these relations, one can formulate definitionsof segments, angles,etc.),and two given segments (or angles) can be
congruent to each other.
One can try to interpretthese notions and relations in the usualintuitive way, but the whole point of Hilbert's axiomatic approachisthat such interpretations are considered irrelevant. The meaning andpropertiesofthe notionsandrelationsare established by a certain listof axioms. All further geometric propositions are obtained from theaxiomsby logical derivation, which in principle can be doneformally,
not appealing to the nature of the objectsinvolved. By the expression
of Hilbert himself, \"it must be possible to replace in all geometricstatementsthe words point, line, plane by table, chair, mug.\" To
illustrate the character of Hilbert's axioms, we list the threeaxiomsoforder:(i) If the points A, B, C lie on a line, and B lies between A and C,then B lies alsobetween C and A.
(it) If A and C are two points of a line, then there exists at least onepoint B lying between A and C, and at least onepoint D such that
C lies between A and D.(iii) Of any three points lying on a line, thereis always one and onlyone which lies betweenthe other two.

3. Foundations o\234geometry 131
We are not going to presentherethe whole system of Hilbert's20 axioms; let us mentiononly that it includes the parallel postulate(or a negationof it), Archimedes' axiom(seeBookI, \365145), and
as the last item in the list, the axiom ofcompleteness:To a system of points, lines, and planes, it is impossibleto add other
elements in such a manner that the system thus generalizedformsa
new geometry obeying all of the previous axioms.136.The set-theoreticapproach.While Hilbert's work laid
down a new area of mathematics:mathematicallogic,the modern
approach to geometry relies on a different foundation, which strikes abetter balance between rigorand intuition.It was proposed in 1916
by Hermann Weyl and is basedon the algebraicnotion of a vector
space.
What makes Weyl's approachparticularlyattractiveis that it
uses only very general undefinable notions, such as setsand ele-
ments, which permeate all of mathematics, and not only geometry.
Set theory first emerged at the end of the 19thcentury in the work
of a German mathematician Georg Cantor as the theory compar-
ing various infinite sets, but soonbecamethe universal language ofmodern mathematics.
Sets are thoughtofascollectionsofobjectsofany nature. It may
be impossible to express this moreformally than by saying that aset is consideredgiven if for every object it is specified whether it isan element of this set or not. All further notions are introduced onthe basis of this relationbetween elements and sets. For example,one set is calleda subsetofanother, if every element of the first setis alsoan elementof the second.
So far, following Euclid, we considered linesand planesas sepa-rate entities, and not merely as sets of points lying on them. 7 One
simplifying distinction of the set-theoreticapproachto geometry is
that only the set of points and its propertiesneed to be postulated,
while lines and planes are defined simply as certain subsets of the setof points, so that all their properties become theorems.
Another ingredient of Weyl's approach to geometry is the set Rof realnumbers(positive, zero, and negative) endowed with theusual operationsof addition,subtraction, multiplication, and divi-
sion by non-zero numbers. To definereal numbers and the arithmetic
operations, it suffices to introduce them in terms of signed sequences
of decimal numerals (asoutlinedin Book I, \365\365151-153).
7In particular, the same line couldbe represented by any finite piece of it (that
fits a diagram), and it made sense to talk about %xtending\" the line.
132 Chapter 4. VECTORS AND FOUNDATIONS
137.Axiomsofa vectorspace.By definition, a vector spaceis a set, equippedwith operations of addition and multiplicationby scalars which are requiredto satisfy certain axioms. The setwill be denoted here by )2, and its elements will be referred to asvectors. Thescalars form the set R of real numbers, which includesthereforethe numbers 0 and 1. To every vector \177 and scalar c\177(i.e.
any elements of the sets )2 and R), the operation of multiplicationassociates a new vector, denoted c\177. To every pair of vectors \1777and
\177, the operation of addition associates a new vectordenoted\1777+ \177.
The axioms require that for all vectors \177, \177,\177 and all scalars c\177,/3 the
following holds true:
(i) (\177 + \177) + \177 = \177+ (\177 + \177),
(ii) \177+ \177= \177+ \177,
(iii) There is a unique vector 6 such that \177+ 6 = \1777for all \1777,
(iv) \177(3g) = (\1773)g(v) \177(\177+ \177) = \177 +(\177i) (\177 + \177)4 = \1774 + \177<
\275ii) , 04 = 6,(viii) \1774 = 4.
In words, the axioms express: associativity and commutativity of
addition of vectors, existence and uniqueness of the zero vector, as-sociativity of multiplication by scalars, its distributivity with respectto addition of vectors,to addition of scalars, and the way the multi-plication by the scalars 0 and i acts.
Here is an exampleof explicit derivation from the axioms.
For every vector \177 there exists a unique opposite vector, i.e. avector\1777such that \177+ \177'= \177.
Indeed, we have:
\177= 0\177: (\177 + (-\177))\177
: D7+ (-1)ff = \1777+ (-1)if,
and hence (-1)\1777 is opposite to
Conversely, if \177= \177+ \177, .then
(-\177)\177+ 5: (-\177)\177+ (\177+ \177),
(-\177)\177 = ((-\177)\177 + \177)+ \177
= (-\177 + \177)\177+ \177=o\177+ \177=5+
=\276+5: \276, i.e. \276: (-1)\276.
Because of:
(vii), and 0-- 1+ (-1)(vi) and (viii)
definition of opposite vectorsdefinition of oppositevectorsadding each side to (-1)\276(iii) and (i)(vi),-1 + 1: 0, and (vii)
(ii) and (iii)
We will denote the vectoroppositeto a vector ff simply by -\276
and write \177- \1777instead of \177 + (-\177). Due to the axiom (i) we can
also write sums of several vectorswithout parentheses,e.g.

3. \177ound\177tions o\234geometry 133
138. Subspaces and dimension. Several vectors ff,\177Y,...,\177
are called linearly dependent if there exist scalars c\177,/3,...,\"/,notall equalto 0, such that
o\177u + -.' + 7\177 = O.
The vectors are called linearly independent otherwise, i.e. if this
equality is possible only when c\177 = /3 = ... = 7 = 0. Clearly,
including new elements in a linearly dependent set ofvectorsleaves
it linearly dependent. A vector space is said to be ofdimension/c
if it contains a set of/c linearly independentvectors,but every/c + 1
vectors are linearly dependent.An expression of the form
/3\276 +... + 7\177
is called a linear combination of vectors \1777,\177Y,...,\177 with coeffi-
cients c\177,/3,...,7. Given a set of vectors in a vector space 1/, alllinear combinationsof thesevectorsform a subspace 14/, i.e. a sub-set of 1/whichis a vector space on its own with respect to the sameoperations.Indeed,sums and scalar multiples of linear combinationsof given vectors are themselves linear combinations of the samevec-tors.The same applies to the opposites of such linear combinations,and to the vector 6 = 0\1777+ 0\177Y+ ... + 0\177, which therefore lie in 14/.Thus the operationswith vectors are well-defined in 14/, and satisfyaxioms(i)-(viii) because the axioms hold true in the ambient vectorspace
Theorem. (1) All scalar multiples of a single non-zerovectorform a subspaceof dimension1.
(2) All linear combinations of two linearly independentvectors form a subspaceof dimension2.
(1) Indeed, a nonzero vector ff forms a linearly independent setconsisting of one element, while any two scalar multiples ff\177= c\177ff and
\177=/3ff of ff are linearly dependent. Indeed, if/3 = 0, then 0ff\177+l\177 =
and if/3 :/: 0, then lff\177- (c\177//3)\177 = 6.
(2) To prove that all linearcombinations of two linearly inde-pendent vectors ff and \276 form a subspace of dimension 2, it sufficesto show that any three such linear combinations:
\177-- /31 \177q-/327\177, and 5 = \"/1\177 q- \"/27\177 are linearly dependent. Indeed,
if \177- 6, then 05 q- 0\177 q- 15 = 6, and hence the vectorsare linearly
dependent. Suppose that \177 \177 6. Then at least one of the coeffi-
cients \"/\177, \"/2 is non-zero. For certainty, let \"/2 \177 0. Then the vectors
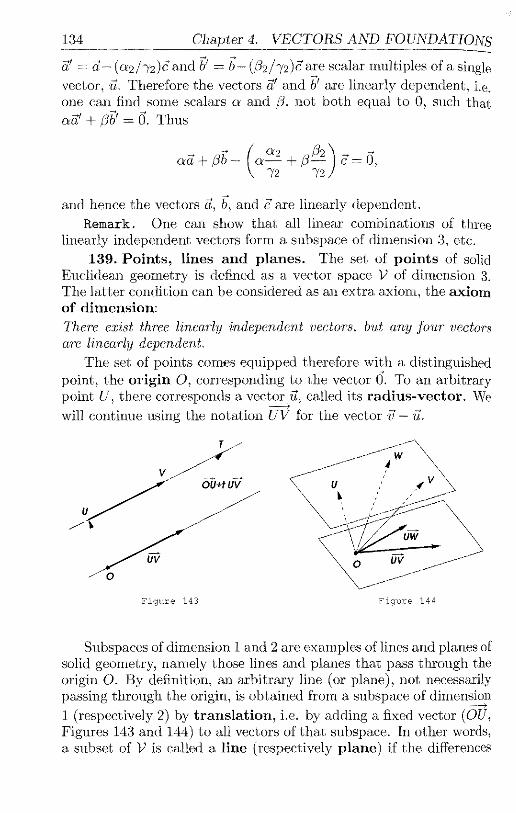
134 Chapter 4. VECTORSAND FOUNDATIONS
5' = 5-(c\1772/%)5, and \177\"= \177-(/32/72)5' are scalar multiples of a singlevector,\276. Therefore the vectors 5' and \177' are linearly dependent, i.e.one can find some scalars c\177and/3, not both equal to 0, such that\1775' +/3\177t = 6. Thus
og+/3O- +/35/2 5/2 /
and hence the vectors 5, \177, and 5 are linearly dependent.gemark. One can show that all linear combinations of three
linearly independentvectorsform a subspace of dimension 3, etc.139. Points, lines and planes. The set of points of solid
Euclidean geometry is defined as a vector space V of dimension 3.The latter conditioncanbe considered as an extra axiom, the axiomof dimension:Thereexistthree linearly independent vectors, but any four vectorsare linearly dependent.
The set of points comes equipped thereforewith a distinguished
point, the origin O, corresponding to the vector6. Toan arbitrary
point U, there corresponds a vector if, called its radius-vector. We
will continue using the notationUV for the vector \276- if.
v T
Figure 143 Figure 144
Subspaces of dimension1 and 2 are examples of lines and planes of
solid geometry, namely those lines and planes that passthrough the
origin O. By definition, an arbitrary line (or plane),not necessarily
passing through the origin, is obtained from a subspace of dimension,->
1 (respectively 2) by translation, i.e. by addinga fixed vector (OU,
Figures 143 and 144) to all vectorsofthat subspace.In other words,
a subset of ]2 is called a line (respectively plane) if the differences
3. Foundations of geometry 135
(OV-OU: UV, Figures 143 and 145) of radius-vectors of its pointsform a subspace of dimension I (respectively 2).
The following result shows how Euclid's postulates about linesand planesbecometheorems under the vector approach to founda-tions of solidgeometry.
Theorem. (1) For every two distinct points, there is aunique linepassingthrough them.
(2) For every three points' not lying on the same line,there emists a unique planepassingthrough them.
(3) If two points of a given line lieina given plane, then
every point of the line lies in that plane.(4) If two distinct planes have a common point, then they
intersect in a line passing through that point.(5) Given a line, and a point not lying on it, there emists
a unique line passing through this pointandparallelto the
given line.
(1) Given two distinct points U and V (Figure 143), the set of
points with the radius-vectorsOU+ tUV, where t is an arbitraryreal number, containsU (for l = 0), V (for l = 1), and forms a line,
since all differences of such vectorsare scalar multiples of the vector
UV. Conversely, if a point T lies on any line passin>g throug>h U and
V, then the vector UT must be proportional to UV, i.e. UT - tUVfor some real number t. Therefore OT - OU+ tUV, i.e. the point
T lies on the line previously described.
(2) If three given points U, V, and W (Figure 144) are non-
collinear, then the vectorsUV and UW are linearly indep>endent.The set of points with the radius-vectors OU + xUV 4-yUW, wherex and y are arbitrary real numbers, contains the three given points
(take the pair (x,y) to be (0,0), (1,0)and (0, 1)) and forms a plane.>
Indeed, differences of such radius-vectors have the form ceUV +/\177UW
and thus form a subspaceofdimension2. Conversely, if T is any point
on a plane passin\177 through U, V, and W, then the three vectors) >
UT, UV, and UW must lie in the samesubspaceof. dimension 2.
Therefore they are linearly dependent, andhenceUT--xUV+y>UW
for some real numbers x and y. ThusOT- OU + xUV + yUW, i.e.the point T lieson the plane previously described.
(3) Let 79 (Figure 145) be a subspace of dimension 2, and let U
and V be distinct points ona plane P obtained from 79 by translation.Then the vectorUV = OV - OU lies in 79, as well as gUV where

136 Chapter 4. VECTORS AND FOUNDATIONS
t is any real number. Thereforeall pointswith the radius-vectors>
OU 4- tUV lie on the plane P.(4) Suppose that two planes P and P' (Figure 146) intersect
at a point U. In the plane P (respectivelyP'), pick two points
V and W (respectively V' and I/V \177) not collinear with U. Then
the vectors UV and UI/V (respectively UV \177and UI/V \177) are linearly
independent. Since the space \276 has dimension 3, the four vectors arelinearly dependent. Thereforethere exist real numbers \177, fi, \177, fi\177
not all equal to 0 such that \177UV + fiUW = \177UV \177+ fi\177UW \177.Denote
by 5 the vector represented by either of the equalexpressions.The
point A with the radius-vector OA = OU + 5 liesin both planes.
It is different from U, becauseotherwisewe would have 5 = \177 in
contradiction with linear independence of each pair of vectors.By
(3), the planes intersect along the wholelineUA. Any common point
B of the planes P and P\177 must lie on this line. Indeed, otherwisewe would have three non-collinearpointsU, A and B lying in twodistinct planes, which contradicts(2).
Figure 145 Figure 146
(5) Let UV (Figure 147)bea given line and W a point not lyingon it. Theplane passing through U, V, and W consists of all pointswhose radius-vectors have the form OU + xUV + yUW. Taking
y = I we see that the planecontains the line formed by points withthe radius-vectorsOW + xUV. It passes through W (when x =
and does not intersect the line UV. For if it did, the intersection
point would have the radius-vectorOW 4- xUV = OU + tUV. Thiswould imply: UW - (t - x)UV, i.e. that the point W lies on theline UV, which is impossible. Thus, we have found a line passing

3. Foundations of geometry
through W and parallel to the lineUV.Toprove uniqueness, consider any line WZ parallel to UV. Since
the points U, V, Z, and W lie in the sameplane,the three difference,> > > >
vectors UV, UW, and WZ must be linearly dependent,i.e. o\177UV +
3UW + ?WZ = \177 for some scalars c\177,3, ? not all equal to zero. If3 \177 0, then UW + (\177/3)WZ = -(\177/3)UV.Adding OU to both
sides, we find a point with the radius-vectorOW + (\177/3)WZ =
OU- (\177/3)UV, which therefore lies on both parallel lines WZ andUV. Sincethisisimpossible,we conclude that ,8 = 0. This impliesthat the vectorsUV and WZ are scalar multiples of each other:WZ = \177UV. Thus OZ = OW + \177UV, i.e. the line WZ parallel toUV coincideswith the line previously constructed.
Figure 147
140. Inner products. Theconcept of a vector space (satisfyingthe axiom of dimension)is sufficient to describe the set of points,as well as lines and planes,of Euclidean geometry. To introduce
measures of lengths and angles,an extra datum is required.
An inner product on a vectorspace\276 is an operation that, toevery pair of vectors3 and \276, assigns a real number, denoted 3. \276,
in such a way that the properties of symmetricity and bilinearityare satisfied: for all vectors 3, \177,t\177 and scalars c\177,\177
\337V--V' ,
+ . = +
An inner product is called Euclidean if 3-ff > 0 for every non-zero
vector \1777. A vector space endowed with a Euclidean inner product iscalleda Euclideanvectorspace.
In a Euclidean vector space, lengths of vectors are defined as

138 Chapter 4. VECTORS AND FOUNDATIONS
This expressionmakes sense because the number under the square-root sign is non-negative. The distance between two points U and V
is then defined as the length \177-\177 of the difference U\177: Okof their radius-vectors.
Fora measure of angles from 0 \370to 180 \370,the cosine of the angularmeasure can be taken.Thecosine of the angle between two non-zerovectors 4 and \177Yis defined by means of the formula:
cos =
In order to represent a legitimate value of the cosine,the expres-sionon the R.H.S. needs to lie between -1 and 1. Thisproperty is
guaranteed by the following Cauchy-Schwarz inequality.Lemma. For all vectors 4 and \177 of a Euclidean vector
space, we have:(4. < 141
and the equality holds only when the vectors are scalarmul-
tiples of each other.
Put A = 4.4 = [\1777\177,B -- 4. \276, C = \1777. \1777-- [\177\177,and examine the
following expression of dcgrcc _< 2 with respect to a real number t:
(t4 + \276). (t4 + \276) = At 2 q- 2Bt + U.
If t is a solutiontotheequation At 2 + 2Bt q- C = O, then \1774 + g = (\177
(since non-zero vectors have positive inner squares), andhenceoneof
the vectors is a multiple of the other. If, alternatively, the quadratic
equation has no solutions, then (as it is known from algebra) the
discriminant 4B 2 - 4AC is negative, i.e. B 2 < AC as required.141.Congruence.A geometric transformation 8 (of the plane)
is called an isometry if it preserves pairwise distances between
points.
One can show (seethe last section)that isometriesof the Eu-
clidean plane are: translations (by any vector), rotations (through
any angle, about any center), reflections (about any line), or compo-
sitions of these transformations, i.e. the geometrictransformations
obtained by their consecutive application.
Respectively, one cancalltwo plane geometric figures congruentif one of them can be obtained from the other by an isometry of
the plane. This definition grounds the concept of congruence on
SThat is, any rule assigning to every point of F another point of F.

3. Foundations ofgeometry 139satisfactory foundations. Namely, it makes precise the intuitive ideaof \"moving figures through space without change\" (see BookI, \365l).
If applied to space figures, this definition would result in a con-
cept of congruence slightly different from the one used in this book.Indeed,isometriesofa Euclidean space of dimension 3 include notonly rotations about any axis and translations, but also reflectionsabout any center, or any plane. As a result, geometricfigures which
are symmetric (but not necessarily congruent, seefor instance \36549)
can be obtained from each other by isometries.
EXERCISES
266. From the 5th postulate, derivethat if a straight line fallingonto two lines makesinteriorangles on the same side greater thantwo right angles,then the two straight lines, if produced indefinitely,meet on the othersideto which are the angles greater than two rightangles.Deducethe uniqueness statement of the parallel postulate.267. Show that on the number line, rational numbers form a set ofpoints satisfying Hilbert's axioms of order. Does this set satisfy the
axiom of completeness?
268. Show that the requirementin the axiom (iii) of a vector space,that the element\177 is unique, is redundant; namely, it follows from
the existence statement of this axiom, and the axiom(ii).269.Prove that for every vector \177of a vector space, \177+\177+\177+\177: 4\177Y.
270. Prove that the set R/C of all ordered k-tuples (Xl,...,x/c) ofreal numberssatisfiesthe axioms (i)-(viii) of a vector space withrespect to the following component-wise operations of multiplicationby scalars and addition: .
271.Can a set of vectors be linearly dependent if it contains only
one element?
272. Prove that every subset of a linearly independent set of vectorsis linearly independent.273. Prove that in R/C, the k elements (1,0,...,0),..., (0,...,0, 1)are linearly independent.
274\177. Prove that R 1 and R 2 are vector spaces of dimension 1 and 2respectively.

140 Chapter 4. VECTORS AND FOUNDATIONS
275.* Give an example of a vectorspaceof infinite dimension, i.e.
containing sets of k linearly independent vectorswith k as large asone wishes.
276.* Which of the five parts of the theorem in \365139 remain true in
vector spaces of dimension greater than 3?
277. Prove that planes in space obtained from each other by trans-
lation either coincideor do not intersect (i.e. are parallel), and con-versely,parallelplanesare obtained from each other by translation.
278. Provethat two lines in space obtained from each other by trans-
lation either coincide or are parallel (i.e. do not intersectand lie in
a plane), and conversely, parallel linesareobtainedfrom each other
by translation.
279. Check that the vectorspaceR\177,equipped with the inner prod-uct (x\177,...,x\177) - (y\177,...,y\177) = x\177y\177 d-... d- x\177y\177, is Euclidean, and
compute lengths and pairwise anglesof the k vectors(1,0,...,0),..., (0,...,0, \177).
280. Prove that in a Euclidean vector space, two non-zero vectors
are perpendicular if and o\177ly if their inner product is equal to zero.281.*Prove that every Euclidean plane (i.e. a Euclideanvectorspaceof dimension 2) contains two perpendicular vectors of unit length.282. Provethat in a Euclidean vector space, every set e\177,...,\177'\177of
non-zero pairwise perpendicular vectors is linearly independent.Hint' Compute the inner product of their linear combination with
each of the vectors.
283.* Prove the triangle inequality: for arbitrary radius-vectors
\1777,\177,t\177 in a Euclidean vector space,Hint' Use the Cauchy-Schwarz inequality.
284. Prove the law of cosinesfor triangles ABe' in a Euclidean vector
space: \177-\1772 d-IBd 2 - 2IA/} Bd cos ZABC: \177-\1772.
285. Prove that an isometry of a Euclideanvectorspacepreserves an-
gles between any segments, i.e. if it transforms/NABC into/NA'B'C',then ZABC=286.Prove that a translation of a Euclidean vector spaceby a fixed
vector \276 (i.e. the transformation assigning to a point \177 the point
\177+ \276) is an isometry.
287.* Prove that every geometric transformationof the planethat
can be obtained by composing translations, rotations, or reflections,can also be described as the rotation about the originor reflection
about a line passing through the origin, possibly followed by a trans-lation.

Introduction to non-Euclideangeometry
4 Introduction to non-Euclidean geometry142. Coordinates in space. Let ]? be a Euclideanvector space
of dimension 3. Let \177 be a unit vector, i.e. any vector of unit length
(which can be found by choosing any non-zero vectorand dividing
it by its length). Take any vector \1777linearly independent of e\177 and
subtract from it a scalar multiple of \177*\177so that the resulting vector\177- s\177 is perpendicular to e\177. For this, put s = \1777- \177'\177so that
(\177 - s\177). eq = \177. \177 - s eq \337\177 = s - s = 0.
Dividing the resulting vector by its length we obtaina unit vector \1772
perpendicular to eq.
Next, take any vector \276linearly independent of \177'\177and \177'2. (Such
vectors exist because the vector space ]2 is of dimension> 2.) Sub-
tract from \276a linear combination of the vectors \177'\177and \1772 so that the
resulting vector \276- s\177'\177 - s2e-\177 is perpendicular to them. For this,put s\177 = \177' \177, s2 = F. e-\177. Since \177 \337\177*\177= \1772 \337\177'2= 1 and \177'\177\337\1772 = O,we have:
Dividing the resultingvectorby its length we obtain a unit vector e-\177
perpendicular to e\177 and \177'2. In fact we have constructed a Cartesiancoordinate system in space.
Let \177 be any 4th vector. Since any 4 vectorsin a vector space ofdimension 3 are linearly dependent,thereexist scalars s0, s\177, s2, s3
-* -\177 S3 3--- $2 2not all equal to 0 such that sox s\177e\177 + \177, + \177, Moreover,
so \177 0, since the vectors \177'\177,e\1772,\1773 are linearly independent. Dividingthis equality by so, we find:
3\177-- X l e-*l q- x2\177'2 q- x 3 e\1773,
where x\177, x2, x3 are some real numbers. They are calledthe coordi-
nates of the vector \177 with respect \177to this coordinate system.
The coordinates are uniquely determinedby the vector. Indeed,' \177 x' \177. thenif \177= x\177'\177 + x2e2 + 3 3,
6--- (331
and therefore x\177 = 'x\177, x2 = x\177, 333 --- 33\177 due to the linear indepen-dence of the vectorse\177, e\1772,\1773.

142 Chapter 4. VECTORS AND FOUNDATIONS
Furthermore, for every scalar c\177we have:
OZ\177 --- (OZ331)\177* 1 -+- (OZ332)\177 2 -+- (OZ 3)\1773,
i.e. the coordinates of a scalar multipleof a vectorare obtained by
multiplying the coordinates of the vector by this scalar.
If \1777= y\177g\177+ Y292 + Y393 is another vector, then
\177-+- \177: (Xl -+- \177/1)\177'1-+- (\177U2 -+- \177/2)\177,2-+- (\177U3 -+- \177/3)\177I,3,
i.e. the coordinates of the sum of two vectors are obtainedby adding
corresponding coordinates of the vectors. Since pairwiseinner prod-
ucts of the vectors g\177, e-\177,e-\177 are equal to 0, and their inner squaresare equal to 1, we find:
:\177' \177---- Xly 1 \276-X2y 2 \276-X3y 3.
These formulas can be generalized. Denoteby R \177the set of all
ordered k-tuples (x\177,...,z\177) of real numbers. Introduce in R \177the
operations of multiplication by scalars, addition, and inner productby the formulas:
+ (w,...,w): + +,:%). (w,... ,w) = :aw+-'-+
It is not hard to verify that the axioms(i)-(viii) of a vector space,as well as the propertiesof symmetricity and bilinearity of an in-ner product, are satisfiedin R \177. In particular, the k-tuple (0,..., 0)plays the role of the vector iJ, and all other k-tuples have positiveinner squares: \177c\177+.. \337+ \177c} > 0. Thus R \177equipped with these oper-ations is a Euclidean vectorspace(of dimension k). It is called thecoordinate Euclidean space. Thus our previous construction of aCartesian coordinate system in 12 establishes the following theorem.
Theorem. Any Euclidean vector space of dimension3 can
be identified with the coordinate Euclidean space 1% 3 by as-
sociating to each radius-vector the ordered triple of its co-
ordinates with respect to a Cartesian coordinate system.Remarks. (1) The same result holds true for a Euclidean space
of any finite dimension k, for the plane in particular, where k = 2.(2) The identification of 12 with the coordinate Euclidean space
is not unique, but depends on the choice of a Cartesiancoordinate

4[. Introduction to non-Euclidean geometry 143
system. In other words, if a different triple e\177,\1772,\1773 of pairwise
perpendicular unit vectors is chosen, the samevector \177 will have adifferent triple of coordinates with respectto it, and will therefore
be assigned a different element of Rs.(3)We see that within the vector approach to geometry,not only
can the foundations be described by a conciseand unambiguous set of
axioms, but also a model satisfying all the axioms can be explicitlyconstructed. The only datmn needed for this is the set R of realnumbers equipped with ordinary arithmetic operations. Moreover,accordingto the theorem,any such model can be identified with thecoordinateone,R3. Inthissense,onecan say that solid Euclidean
geometry obeying the requiredaxiomsexistsand is unique.
143. The Klein model. A simple variant of plane geometrythat satisfiesmostofEuclid's(or Hilbert's) axioms but disobeys theparallel postulate was proposedin 1868 by an Italian mathemati-cian Eugenio Beltrami and then improved on by the EnglishmanArthur Cayley and the GermanFelixKlein.
Figure 148
On the Euclidean plane, take any disk, and declarethe set ofinterior points of this disk to be the set of allpointsof the Klein
model, and chords of the disk to be linesofthe Klein model. 9 Then,
given a line AB (Figure148)and a pointCoutsideit, one can draw
through C as many lines as onewishes that are parallel to AB in theKlein model(i.e.donot intersect AB inside the disk):
In fact, the Kleinmodeldoesnot yet qualify for the role of a non-Euclideangeometry, because it disobeys not only the parallel postu-late,but also some other axioms of Euclidean geometry. Namely, if
9This proposal goes therefore, although not too far, in the direction (using
Hilbert's metaphor) of table, chair, mug taking on the role of point, line, plane.
144 Chapter 4. VECTORS AND FOUNDATIONS
we assume that the distance in the Klein model is measuredin the
usual Euclidean way, then Euclid's 4th postulate (about existenceof circles of arbitrary radius with arbitrary centers) no longerholds
true. However from Hilbert's point of view, it is the axiomof com-
pleteness that fails in the Klein model. Namely, one can enclose the
disk of all points of the Kleinmodelinto a larger disk and thus geta new Kleinmodelwhich, compared to the original one, has extrapointsand lines.We will see later that these defects can be correctedby changing the concept of distance (in such a way that the points
of the boundary circle becomeinfinitely far from interior points).
The significance of the Kleinmodelbecomes more clear in the
context of numerous attempts, known in the history of mathemat-ics, to derivethe parallelpostulatefrom the others. Following themethod of reductio ad absurdurn, one would start with the negationof the parallelpostulateand try to reach a contradiction.
The Klein modelshows that one does not come to a contradictionby merely rejecting the parallel postulate. Moreover, if any argument
that makes sense in the Klein modelcouldlead to a contradiction,
this would mean that a contradictionis found in the classical planegeometry. This is becausethe Klein modelis described in terms
of the classical plane geometry Thus the plane geometry, where
the parallel postulate holds true, cannot be consistent(i.e. free
of logical contradictions) unless the Klein model, wherethe parallelpostulatefails, is also consistent.
144. Spherical geometry. In the EuclideanspaceRs, consider
the surface given by the coordinate equation
It consistsofall points whose radius-vectors have the length R. It isthereforethe sphere of radius R centered at the origin.Geometryonthis surface is called spherical geometry. It provides an approxi-mationto geometry of the Globe, and a model of non-Euclidean ge-ometry.Namely (Figure 149), one defines lines of sphericalgeometryas great circles of the sphere. Every great circle is obtainedby inter-
secting the sphere by a plane passingthrough the center. Any twosuch planes intersect alonga line in space passing through the center(O). Thislinecuts through the sphere at two diametrically oppositepoints (C and C\177), which therefore lie on both great circles. Thisshows that in spherical geometry, every two lines intersect. Thus,the Euclideanparallel postulate fails in spherical geometry, becausethem arc no parallel lines there at all.

4. Introduction to non-Euclideangeometry 145
The length of a line segment (e.g. AB, Figure149)in spherical
geometry is taken to be the Euclideanarclength of the correspondingarc of the great circle,i.e. \177-R(a/2d), where 2d and a are measuresof the straight angleand centralangle A\270B, respectively. Areas of
regions in spherical geometryare alsodefined in the natural way,i.e. as Euclidean areasof the correspondingparts of the sphere (e.g.4\177R 2 for the total area of the sphere). To measure angles on the
surface of the sphere, one measuresthe Euclidean angle (A\177C\177B \177)
between the rays tangent to the correspondinggreatcirclesat a point
(\177) of intersection.
c
Figure 149 Figure 150
Theorem. The sum of interior angles of a sphericaltri-angle(ABC, Figure 150) is greater than 2d. More precisely,the ratio ofthesumoftheangles(a,/3,and if) to the straight
angle 2d exceeds I by the ratio of the spherical area S of thetriangleto theareaof the great disk:
a+/3+s S-14---\177,d \177R\177'
Firstly, examine a spherical lune (CAC'B, shadedon Figure149)enclosedbetween two great semicircles. The lune is swept by
one of the semicircles rotated about the axisCC\177through the angle
\177 -- \177AOB. It is clear (see also Remarkin \365112) that the area of thelune is proportionalto the angle of rotation. The area is thereforeequal to 4\177R\177(-/4\177) = \177R\177(-/\177). The angle A'CB' between thesides of the lune at the vertexC' isa linear angle of the dihedral
angle ACC\177B (since the plane A\177C\177B \177is tangent to the sphere at the
146 Chapter4. VECTORS AND FOUNDATIONS
point C t and is therefore perpendicular to the radius OCt). Thus
\177 = ZAtCtB t. Note that the two great circles CAC
divide the sphere into four lunes, one of which is symmetric to thelune CACtB about the center O of the sphereand hasthe samearea.
We conclude that a pair of centrally symmetriclunes with interior
angles a at the vertices have the total area
Consider now any three great circles (Figure 180). They divide
the sphere into four pairs of centrally symmetricsphericaltriangles.
Let/kABC and/kAtBtC t be one of the pairs. The interior sphericalanglesof thesetriangles, and the angles vertical to them are at thesametime interior angles of three pairs of centrally symmetriclunes
(e.g. the pair ABAtC and ACtAtB t of lunes with the vertices A
and At). The total area of these three pairsof lunes is equal to
27r/i\1772(\177 +/\177 + 7)/d, where \177,/\177, '7 are the angles of/NABC. On theother hand, these three pairs of lunes cover each of the sphericaltriangles ABC and AtB\177Ct three times, and the rest of the sphereonce.Thus we have:
27rR 2 oz \177-/\177+ '7 = 47rR2 + 4\177q.d
Dividing by the total area of the sphere,we obtain the required result.
As a model of non-Euclideanplane,spherical geometry suffers
the following obvious flaw: through a pair of centrally symmetric
points of the sphere, pass infinitely many great circles (while in planegeometry -- Euclideanornot-- exactly one line through every pairof points is allowed). This defectis easy to correct: it suffices todeclare that eachpair of centrally syrrzmetric points of the sphererepresents a single elementof the set of points. This way one obtainsthe spherical modelof non-Euclidean geometry, which obeys allbut one axiom expectedof a geometric plane, namely the parallelpostulate, which is replacedwith the property that every two linesmeet at exactly onepoint. Sincethe sphericalmodel is constructed
entirely in terms of the coordinateEuclideanspaceRs, this version
of non-Euclidean geometry turns out to be at least as consistentas
solid Euclidean geometry.
It is useful to comparethe sphericalmodel with the construction,
outlined in \365132, of the projectire plane. The set of points of the
projective plane can be defined as the setof 1-dimensional subspaces
in R s (i.e. lines passing throughthe origin).If we pick in R s a planeP (Figure151)not passing through the origin, those 1-dimensionalsubspaces (e.g. a) which are not parallel to P intersect P at onepoint
each, and thus can be identified with these points of the plane P.

4. Introduction to non-Euclidean geometry 147
The projective plane alsocontains1-dimensionalsubspaces parallel
to P (e.g. b), which are thereforenot representedby points of P
(but can be interpreted as its \"points at infinity\.") Note that each1-dimensional subspace in R3 intersects a sphere centered at theorigin at a pair of centrally symmetric points (A and A', or B and
B'). Thus, the set of points of spherical geometry is identified withthe set of points (all-- finite or infinite) of the projective plane. Thisway, the projective plane becomes endowed with notions of distancebetweenpoints inheritedfrom the sphere, i.e. determined by theangie (AOB)betweenthe 1-dimensionalsubspaces.
Figure 151 Figure 152
145. The Minkowski space. In the coordinatevector space
introduce the Minkowski inner product'
(X0,:81,:82)' (Y0, Y2, Y3) -- --XOYO 4. XlYl 4. x2Y2.
It is straightforward to verify that the symmetricity and bilinearityproperties, required of an innerproduct,are satisfied. However this
inner product is not Euclidean,becausethere exist non-zero vectors
3 = (x0, xl, x2)whose inner square 3.3 is zero or evennegative.Thesetof points satisfying 3.3 = 0 is given by the equation x0\177-- x\177 4- x22.
Fixing a norazero value of x0 we obtain a circle on a plane, parallel'to the coordinate (xl,x2)-plane,with the center lying on the x0-axis,and radiusequalto x0 \337On the other hand, if a point 3 liesonthissurface, then all points with the radius-vectors proportional to 3 dotoo.Thus, 3.3 = 0 is a conicalsurface(Figure152)with the vertex
at the origin, obtained by rotating a line (e.g. OA) about the xo-axis.The spaceR 3 equipped with the above inner product is called
Minkowski space (as opposed to Euclidean space), after a GermanmathematicianHermannMinkowskiwho introduced it in 1908 in
connection with Einstein's theory' of relativity. Following a physi-
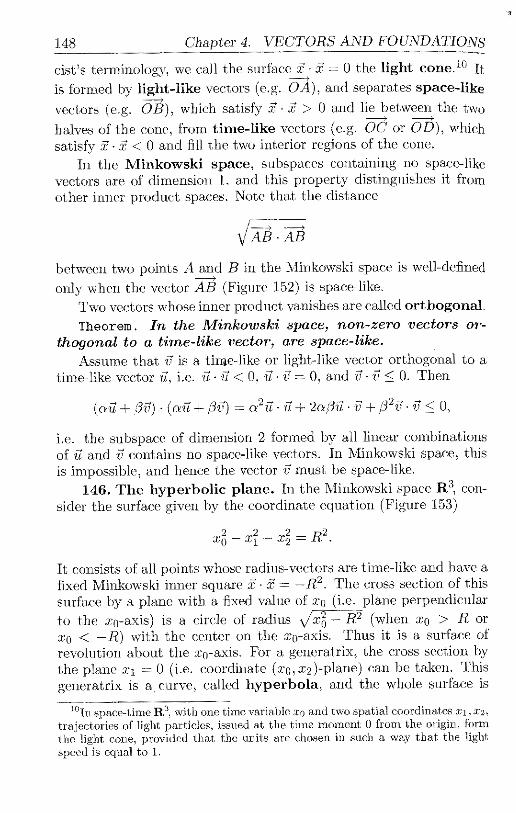
148 Chapter 4. VECTORS AND FOUNDATIONS
cist's terminology, we call the surface \177. \177 = 0 the light cone. l\370 It
is formed by light-like vectors (e.g. OA),and separatesspace-likevectors (e.g. OB), which satisfy \177. \177 > 0 and lie between the twohalves of the cone,from time-like vectors (e.g. OC or OD), whichsatisfy \177. \177 < 0 and fill the two interior regions of the cone.
In the Minkowskispace,subspacescontaining no space-like
vectors are of dimension 1, and this propertydistinguishes it from
other inner product spaces. Note that the distance
between two points A and B in the Minkowskispaceis well-defined
only when the vector AB (Figure 152) is space-like.Two vectors whose inner product vanishes are calledorthogonal.Theorem.In the Minkowski space, non-zero vectors or-
thogonal to a time-like vector,Assume that \276 is a time-like or
time-like vector if, i.e. if. ff < 0, if.
are space-like.light-likevectororthogonalto a\276-- 0, and \276. 2, <_ 0. Then
\337(oe = + \3372' 2, _< o,
i.e. the subspace of dimension 2 formed by all linear combinations
of \276 and 2, contains no space-like vectors. In Minkowski space, this
is impossible, and hence the vector \276must be space-like.
146. The hyperbolic plane. In the Minkowski space R 3, con-sider the surface given by the coordinate equation (Figure 153)
It consists of all pointswhose radius-vectors are time-like and have afixed Minkowski inner square \177. \177: _/\1772. The cross section of thissurfaceby a plane with a fixed value of x0 (i.e. planeperpendicularto the x0-axis) is a circle of radius V/X\177- \1772 (when \1770 > \177 or
x0 < -/\177) with the center on the x0-axis. Thus it is a surface of
revolution about the x0-axis. For a generatrix,the crosssectionby
the plane Xl = 0 (i.e. coordinate (x0,x2)-plane)canbe taken. This
generatrix is a. curve, called hyperbola, and the whole surface is
1\370In space-time R 3, with one time variable x0 and two spatial coordinates x\177,
trajectories of light particles, issued at the time moment 0 from the origin, form
the light cone, provided that the units are chosen in such a way that the light
speed is equal to 1.

Introduction to non-Euclideangeometry 149
called a hyperboloid. This hyperboloid in the Minkowski space isthe counterpartof the sphere in the Euclidean space.
As explained in \365144, in the spherical model of non-Euclideanplane geometry,all subspaces of dimension I in the Euclidean spaceR3 are taken in the role of points. In the hyperboloid modelofnon-Euclidean plane geometry, only time-like subspaces of dimension1 in the Minkowski space R 3 are taken in the roleof points.Every
such subspace meets each branch of the hyperboloid at exactlyonepoint. Thus, in the hyperboloid model, the set of points can beidentified with one of the two branches, e.g. the branchwhere x0 > 0.
We denote this branch by 7-/and call the hyperbolic plane.
\177 D
o
Figure 153 Figure 154
In the hyperbolicmodel,linesare defined by intersecting 7-/with
subspaces of dimension 2. Pick any two points A and B on thehyperbolicplane7-/ (Figure 154). In the Minkowski space R 3, there
is a unique subspace of dimension 2 containingA and B, namely
the plane passing through the points A, B and the origin O. Theintersection of this planewith 7-/is a curve (namely one branch ofa hyperbola)which is considered a line of the hyperboloid model.Thus, in the hyperboloid model of non-Euclidean geometry, one candraw a unique line through every two given points.
Let C be any point on the hyperbolic plane 7-/not lying on thelineAB i.e. lying outside the subspace AOB. Inside this subspace,pick any space-like vector OD, and draw the planethrough the points
C, D and O. This planewill intersect the hyperbolic plane 7-/along acurve d considereda line in the hyperboloid model. This line passesthroughthe pointC and does not intersect the line AB. Indeed, thepointsofintersectionofthe planes AOB and COD lie on the lineODwhich is space-like, and therefore does not intersect the hyperboloid.

150 Chapter 4. VECTORS AND FOUNDATIONS)
Picking inside the subspaceAOB any space-like vector OE non-
proportional to OD, and drawing the plane COE, we obtain anotherlinee, which passes through the point C and does not intersectthe
line AB. Thus, in the hyperboloid modelof non-Euclideangeometry,
through every point outside a given line, onecan draw more than one
line (in fact infinitely many lines) parallelto the given one.
We saw in \365143 that the same is true for the Kleinmodel.The
hyperboloid model and the Klein model are relatedas follows. In the
Minkowski space (Figure 155), draw a planeperpendicular to the x0-
axis. Every time-like subspace of dimension1 meets this plane at apoint lying in the interior of the disk cut out from the plane by
the light cone. Every subspace of dimension 2, containing time-like
vectors, intersects the disk along a chord.This way, points and lines
of the hyperboloid model correspondto pointsand lines of the Kleinmodel. We will show below how one can introduce on the hyperbolicplane 7-g measures of lengths, angles, and areas using geometryoftheMinkowski space.
o
Figure 155 Figure 156
The angle betweentwo lines on the hyperbolic plane \177 intersect-
ing at a point A (Figure 156) is defined as the angle in the Minkowski
space between any non-zero vectors (A/\177 and AC) tangent to theselines. The vectorslie in the plane tangent to the hyperboloid at thepoint A. We will see in \365152 that this plane is orthogonal to theradius-vectorOA of the point A with respect to the Minkowski inner
product. (For instance, the plane tangent to the hyperboloidat thepoint (R,0,0) on Figure 153 is given by the equation x0 = R; allvectorsparallel to this plane have the form (0,Ul,u2) and are there-
fore orthogonal to the vector (R,0,0).) Since the radius-vector OA
is time-like, all vectors tangentto the hyperboloid at the point A arespace-like (by the theoremof \365145). Therefore the inner product on

4. Introductionto non-Euclideangeometry 151
the tangent plane is Euclidean, so that the anglebetweenthe vectors
AB and AC can be measured in the usualway:
> >
AB. ACcos/BAC =
Lengths of line segments,and areas of triangles (or more gen-eral figures)on a hyperbolic plane are introduced by approximat-ing them usingbrokenlines(respectivelypolyhedral surfaces) in the
Minkowski space and passing to certainlimits.Lemma. If two points A and B lie on the same hyper-
bolicplane7\177 then the vector AB in the Minkowski spaceis space-like\177 i.e. AB. AB > O.
The vector\253(OA+OB) is time-like by the property of the conetocontain in its interior the whole segment whoseendpointslieinside.
> ) >
It is orthogonal to the vector AB = OB- OA, because
(OA + 0 \337(OB - OA) = OA . OA - OB . OB = + = O.
By the theorem of \365145, the vector AB \177nust be space-like.
A
0
Figure 157
A
Figure 158
c
Consider a line on the hyperbolicplane\177 obtained by intersect-
ing it with a subspace of dimension2 in the Minkowski space, andlet AB be a segmentof this line (i.e.an arc of a hyperbola lying onthe sectionplane,Figure 157). Inscribe into the arc a broken lineACD... B. According to the lemma, the segments AC, CD, etc.of this broken line are space-like, and therefore their lengths in the
Minkowski space are well-defined. For instance,ICD = v/C/\177 \337C/\177.
The length of the segment AB on the hyperbolic plane is then de-fined as the limit to which the total length (i.e. IACl + [CDI+... )

152 Chapter 4. VECTORS AND FOUNDATIONS
of the brokenlinetendsas the maximal length of the individual seg-ments tends to 0 (and therefore the number of segments increasesindefinitely).
Likewise,given a triangle on the hyperbolic plane, one can ap-proximate it with a polyhedral surface in the Minkowskispace by
picking extra points on the sides and in the interiorof the triangle
and taking them for vertices of the faces(seeFigure 158). The areas
of the faces are well-defined.(Indeed,their sides are space-like seg-ments according to the lemma\177 and to compute the area of each faceone can use any method of plane Euclidean geometry, e.g. Heroh'sformula expressingthe areaofa Euclidean triangle via the lengths
of its sides.) Then the area of/\177ABC on the hyperbolic plane isdefined as the limit to which the total area of the approximatingpolyhedral surface in the Minkowski space tends as sizes of edgesand facesof the polyhedral surface indefinitely decrease.
The hyperboloid model ofnon-Euclideangeometryhasbeencon-
structed entirely in terms of the vector spaceR3 and the Minkowski
inner product in it. Therefore the geometryof the hyperbolicplaneis at least as consistent as \177he Euclidean and spherical variants. In\365152, we will see that (in contrast with spherical geometry)lengths
of line segments and areas of triangles on the hyperbolicplane areunbounded. As for the angle sum of a triangle,the following coun-
terpart of the theorem of \365144 holds true (although we are not goingto prove this).
The sum of interior angles a, \177,-/ of a triangle on the hyperbolicplane is smallerthan 2d, namely:
2d 7\177_R2 '
where S is the area of the triangle.
EXERCISES
288.Prove that the coordinates of a vector 3 = x\177'\177 + x2\177'2 + x3\1773
with respect to a Cartesian coordinate system can be computed as
the inner products: x\177 = 3. \177'\177,x2 = 3. \177'2, x3 = 3. \177'3.
289. Verify that the standard inner product in the vector space R k
is symmetric, bilinear, and Euclidean.290. Describe all ways to identify a vector space of dimensionk: 1with the coordinate space R \177.
291.* Prove that every k + 1 elementsof Rk are linearly dependent.
Hint' Continue the argument used in \365138 for k = i and 2.

4. Introductionto non-Euclidean geometry 153
292. Prove that the set of points in the coordinate space R 3 satisfy-ing an equation of the form \177x\177 -\177\1772x2 + \1773x3 - \177 where at leastone of the scalars \177i is non-zero\177 is a plane\177 perpendicular to the
vector (\177, \1772, \1773). Show that every plane in R 3 can be described byan equation of this form.293. Which of the coordinate equations of planes (introducedin the previous exercise) describe: (a) the same plane? (b) planespassingthrough the origin? (c) parallel planes?
29J. Describe the Kleinmodelofsolidgeometry.
295. Verify directly the theorem of \365144 in the example of a sphericaltriangle all of whoseanglesare right.
296. Express the angle sum of a convexsphericalpolygon in terms
of the number n of its vertices\177 its area S\177 and the radius R of thesphere.297'. (a) Give an example of a spherical triangle whoseexteriorangle
is smaller than one of the interior anglesnot adjacentto it.Remark: Such an example contradicts the theorem of Book I, \36542,
which comes before the introduction of the parallel postulate\177 and
therefore could be expected to hold true in non-Euclidean geometries.
(b) Examine the proof and determinewhich assumption\177 tacitly madein the argument, makes it inapplicableto spherical geometry.
298.* Prove the triangle inequality in spherical geometry.Hint: See\36547.
299. In spherical geometry\177 find the geometric locus of points equidis-tant from:(a) a given point; (b) a given line.300. Show that in a spherical model\177 the distance between any twopoints does not exceeda certain constant, and find the maximalpossible distance.301. Show that lines on the projective plane (defined in \365132) cor-
respond to lines in the spherical model (definedin \365144).
302. Can a non-zero vector be orthogonalto itself?$05.Show that the Minkowski space contains infinitely many sub-spacesof dimension 2 all of whose non-zero vectors are space-like.$OJ.Prove that if two points lie on the samehalf of the light conelthen the distance betweenthemis well-defined.
$05. Prove that a directed segment, whosetail liesin the interior of
one half of the light cone,and the head in the interior of the other,represents a time-likevector.

154 Chapter 4. VECTORS AND FOUNDATIONS
5 Isometries
147. Isometries\177their inverses\177 and compositions. Wedescribe all isometries o\177 the Euclidean, spherical, and hyperboloidmodels of plane geometry,i.e.thosegeometric transformations of the
corresponding plane that preservepairwisedistancesbetween points.
Every geometric transformation G that weconsiderisassumedtobe %ne-to-one and onto,\" i.e. it is required to move different points
to different ones, and to transformthe planein questions onto the
entire plane (rather than a part of it). Theseassumptions guaran-
tee that the geometric transformation can be undone, i.e. that the
inverse transformation, denoted G-1, is well-defined.Applying one
geometric transformation after another we obtain their composi-tion. For instance, composing a transformation with its inverse, ineitherorder,we obtain the identity, i.e. the transformation whichleavesevery point in its original place. Obviously, inversesand com-positionsof isometries are isometries too.
148. Euclidean geometry. Let us beginwith the coordinate
plane R 2 equipped with thi\177 standard Euclidean inner product:
Let (a, b) be any unit vector, i.e. a 2 + b2 = 1. Definea geometrictransformation Q by the formula:
This notation means that a point with the radius-vector \177= (x\177, x2)
on the left of the arrow \"\177-\177\"is moved by Q to a new positionwhose
radius-vector is specified on the right of the arrow.The transformation Q preserves inner products:
Therefore Q preservesdistancesto the origin and the measure of an-gles betweenlinespassingthrough the origin (because the distancesand angles are defined using only the inner product). It follows thatQ is an isometry:

5. IsometHes 155
In fact Q is the rotation about the originthrough the angle 0 suchthat a = cos0, b = sin& Indeed, for \177'\177= (1,0) and e-\177 = (0,1)
(Figure 159), Qe\177 = (a,b) and Qe-\177 = (-b,a), i.e. the vectors arerotated through the angle 0 counter-clockwise. Their linear combi-nations(xl,x2): xle\177 + X2\177'2 are transformed into x\177Qe\177 +
i.e. are rotated likewise.
Define the transformationS by the formula:
It is the reflection about the line x2 = 0 as the axis of symme-
try. Obviously, S alsopreservesinner products and is therefore anisometry.
For any real number t, define the translation T by the vector
\177'= (/, 0) as follows:
It is an isometry, because
e2, \177 0
Figure 159
Using compositions of the transformationsQ, S, and T, we canobtain translations by arbitrary vectors,rotationsabout arbitrary
centers, and reflections about arbitrary lines (not necessarilypassing
through the origin). For instance, the translation by a vector (-t, O)moves the point with the radius-vector (t, O) to the origin. Applying
then the rotation through an angle 0 about the origin, followed by
the translation by the vector (t, 0), we obtain a rotation through thesame angle 0 about the translatedcenter (/, 0).

156 Chapter 4. VECTORS AND FOUNDATIONS
149.Theorem. Every isometry of the Euclidean plane canbe obtainedby composing translations, rotations and reflec-tions.
We call X a fixed point of a geometrictransformationF if
F(X): X.
Lemma. An isometry of the Euclideanplanethat hasthreenon-collinearfixed points is the identity transformation.
Let us assumethat a given isometry F is not the identity. Thenthere existsa pointY such that F(Y) \177 Y. Then every point Xfixed by the isometryF must be equidistant from Y and F(Y), i.e.lie on the perpendicular bisector to the segment connecting Y andF(Y). This contradictsthe assumption that the three fixed pointsof F are non-collinear.Thus F is the identity.
Figure 160
G(B)
G(A)
Figure 161
To prove the theorem,consider now an arbitrary isometry G ofthe plane,and pickany three non-collinear points A, B, and C (Fig-ure 160). There exists a translation T that moves the point G(A)
back to A. Let B' and C' be obtained by applying T to G(B) andG(C) respectively.Thereexists a rotation (2 about the center A
that moves the ray AB \177to AB. Moreover since G, T, and (2 areisometries,the pointQ(B\177) coincides with B since both lie on theray AB and are the same distance away from A. Let C \177denote the
point Q(C'). Then C and C\177'are equidistant from each of the pointsA and B, i.e. C and C '\177are intersection points of two circles, onecenteredat A, the other at B. Since two circles intersectat two
points symmetric about the line of centers, we concludethat eitherC and C \177coincide, or are symmetric about the line AB. In the 2nd

5. Isometries 157
case,the point C \177tis moved to C by the transformationof reflectionS about the line AB. Thus, the composition of G with the transla-
tion T, rotation (\177, and (in the 2nd case) the reflection \177q, moves the
points A, B, and C backto their original positions. By the lemma,the entire compositionis the identity transformation. Undoing the
transformations T, _R (and in the 2nd case \177q) in the reverse order,i.e. appl:Ying_R -1 followed by T -1 (in the 2ndcase:S-1,then _R -1,
and then T-l), we obtain a compositionof translations, rotations,
and possibly reflections which moves every point X to G(X).Thus
the isometry G is such a composition.Remark.In fact every isometry of the Euclidean plane is the ro-
tationthrough some angle about some center, reflection about someline,or translation by some vector.
150. Spherical geometry. Consider now the sphere of radius_R, centered at the origin of the EuclideanspaceR3 which is equipped
with the standard inner product:
(xl,x2,x3) \337(Yl, Y2, Y3) -- xlYl \276-x2Y2 \276-x3Y3.
Let P and P\177 (Figure 161) be
with the x3-axis, and m be the
the sphere with the plane x2 =angle\177about the axis PP\177 by
the intersection points of the spheregreatcircle,obtained by intersecting
0. Define the rotation (\177 through the
the formula:
where a - cos\177 and b = sin\177 satisfy a2+b 2 -- 1. Define thereflection $ about the greatcircle m as:
5= (Xl,X2, X3) \177--\177S\177 = (Xl,--X2,X3).
Define the rotation T throughthe angle\275 about the x2-axis as:
;\177'-- (Xl,X2, X3) \177 T\177'---- (\177Xl - ux3,x2, uXl \276-\177x3),
where t - cos \177 and u = sin \177 satisfy \1772+ u 2 = 1.The transformationQ preservesthe inner product in R 3 (i.e.
Q\177' Q\1777 = 5. \1777for all vectors \177, \1777), and the same holds true for $ andT. In particular,Q,$, and T preserve the sphere, transform greatcirclesto great circles, and preserve arc lengths. Composing thesetransformations,we obtain rotations of the sphere about arbitraryaxes, and reflectionsabout arbitrary great circles. All such trans-formations transformpoints :h\177 centrally symmetric to each other

158 Chapter 4. VECTORSAND FOUNDATIONS
to centrally symmetric points. Therefore these transformationsacton the projectire plane, and thus define isometries of the spherical
model of non-Euclidean plane geometry.We leave it as an exercise to prove that every isometry of the
sphere can be obtainedas a compositionoftransformations(2,T, and
S. In fact every isometry of the sphere is a rotation about an axis
or reflection about a great circle.However, when centrally symmet-
ric points of the sphereare considered the same point, the reflection(Y, Figure 162)of a point (X) about an equator (ra) becomesindis-tinguishable from the axial symmetry (i.e. rotation through 180\370)
about the diameter PP' connecting the correspondingpoles.There-
fore isometries of the spherical model of non-Euclidean geometryreducetorotationsthrough arbitrary angles about arbitrary centers.
Figure 162 Figure 163
151. Hyperbolic geometry. In the spaceR 3 equipped with
the Minkowski inner product
(xo,xl,x2) ' (Yo,Yl,Y2) = -xoYo + xly\177 + xey2,
let 7-{ and 7-{ ' be the two branches of the hyperboloidof revolution
given by the equation x\177 - x\1772 - x22 = R 2, P and P\177 (Figure 163) be
their intersection points with the x0-axis,and ra be the generatrixof 7-{ obtained as the intersection with the plane x2 = 0.
Thetransformation (2 given by the formula
\177= (x0, xl, x2) \177-\177Q\177 ---- (x0, axl - bx2,bxl + ax2),where a = cost?, b = sin0, defines in the Minkowski space the
rotation through the angle 0 about the axisPP\177. Define the reflection
S about the plane x2 = 0 as:(xo,x,x2) (xo,

5. Isometries 159
These transformations preserve the innerproductin the Minkowski
space, and since they also fix the point P, they preserve the branch7/of the hyperboloid-5. \177= R 2, and define isometries on it. Com-posingthese transformations, we obtain isometries of the hyperbolicplane 7/ which fix the point P: rotations about P and reflectionsabout lines passing through P.
Introduce now a hyperbolic rotation Tofthe Minkowski space
about the x2-axis by the formula:
where t and u are arbitrary real numbers satisfying t 2 -u 2: 1. Thehyperbolicrotationpreserves inner products:
We have: T(R, 0,0) = (tR,uR, O). Hence, if we require t > 0, thepoint ?: (R, 0, 0) is transformedinto a point on the generatrix mof the samebranch 7/ of the hyperboloid. Then the whole branch7/is preservedby T, which therefore defines an isometry of the hy-
perbolic plane. The point P can be moved by T to any point on thelinem, and then to any point on the hyperbolic plane (by applying
also rotations Q). Thus we have proved the following result (to be
compared with Book I, \3653).
152. Theorem. For each of the three typesofplanegeome-tries(Euclidean, spherical, and hyperbolic), one can super-impose the plane onto itself(using compositions of transforma-
tions (\177 and T) in a way that moves any given point into any
other given point, and any line through the first givenpointinto any other given line through the second given point,and this canalsobe done after flipping the plane upsidedown (by S).
Corollaries. (1) The plane x0 = R in the Minkowski space is
orthogonal to the radius-vector (/\177, 0, 0) of the point P. The planeintersects7/ only at the point P and is thereforetangent to 7/ at
P. Applying to this planea composition of transformations (\177, S, T
which moves the point P into any other given point'X on the hyper-boloid, we obtaina plane tangent to 7/at X. Since the transforma-tions preserveinner products in the Minkowski space, we concludethat tangent planes to the hyperboloid are orthogonal to the radius-vectorsof the tangency points.
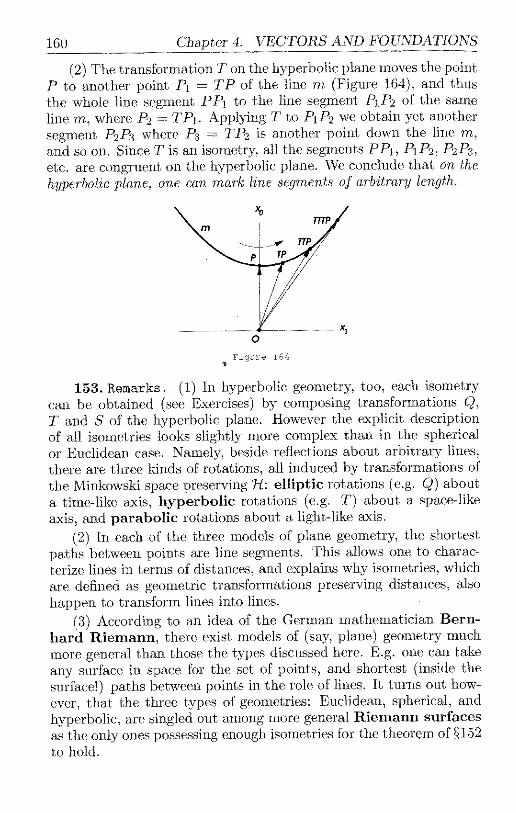
160 Chapter 4. VECTORS AND FOUNDATIONS
(2) The transformation T on the hyperbolic plane movesthe pointP to another point P1 = TiP of the line ra (Figure164),and thus
the whole line segment PP\177 to the line segment P\177P2 of the same
line ra, where P2: TP1. Applying T to PiP2 we obtain yet anothersegmentP2P3where P3: TP2 is another point down the line ra,and so on. Since T is an isometry,all the segmentsPP1,PiP2,P2P3,
etc. are congruent on the hyperbolic plane. We conclude that on the
hyperbolic plane, one can marklinesegmentsof arbitrary length.
k m '\177 TTTP/
TTP
,[ x 1o
Figure 164
153. Remarks. (1) In hyperbolic geometry,too, each isometry
can be obtained (see Exercises) by composingtransformationsQ,T and S of the hyperbolic plane. However the explicitdescriptionof all isometries looks slightly more complex than in the sphericalor Euclidean case. Namely, beside reflections about arbitrary lines,there are three kinds of rotations, all induced by transformations of
the Minkowski space preserving 7-\177: elliptic rotations (e.g. (\177) about
a time-like axis, hyperbolic rotations (e.g. T) about a space-like
axis, and parabolic rotations about a light-likeaxis.(2) In each of the three models of plane geometry,the shortest
paths between points are line segments. This allowsone to charac-
terize lines in terms of distances, and explainswhy isometries, which
are defined as geometric transformations preservingdistances,alsohappen to transform lines into lines.
(3) According to an idea of the German mathematician Bern-hard Riemann, thereexist models of (say, plane) geometry muchmore generalthan those the types discussed here. E.g. one can takeany surface in space for the set of points, and shortest(inside the
surface!) paths between points in the role of lines. It turns out how-ever, that the three types of geometries: Euclidean, spherical, andhyperbolic, are singledout among more general Riemann surfacesas the only onespossessingenough isometries for the theorem of \365152
to hold.

5. Isometries 161
(4) Similarity transformations,i.e. geometric transformations
preserving angles but changing the scale (and respectivelyfigures
which are similar but non-congruent) exist in Euclidean geometrybut not in the spherical or hyperbolic one. That is, in non-Euclidean
geometry, keeping all angles but changing the scaleby a factor of kproduces a new model,which cannot be identified with the originalone by an isometry. To see this, apply in the EuclideanspaceR3 (in
the spherical case) or in the MinkowskispaceR3 (in the hyperbolic
case), the homothety with the coefficient k > 0 with respect to thecenterO. Thishomothety transforms the sphere of radius/\177 into the
sphere of radius k/\177, and the hyperboloid -5- \177:/\1772 into the one
given by the equation -5. \177 = k2R 2. However the spheres or hyper-
boloids corresponding to different values of/\177 cannot be identified
by isometries. Indeed, as it follows from \365144 and \365146,the area ofa sphericalor hyperbolic triangle with given angles depends on R.
(5) One can develop spherical and hyperboloid models of solidnon-Euclideangeometryby starting with the Euclidean or Minkowskiinner product in R 4.
EXERCISES
306. What isometry of the Euclideanplane can result from compos-
ing: (a) two reflections;(b) two rotations?
307. Find the geometric locus of points in the sphericalmodel of
non-Euclidean geometry equidistant from: (a) a point; (b) a line.
308.* Find all triples of whole numbersp _> q >_ r _> 2 such that the
triangle with the angles2d/p,2d/q,and 2d/r lies on the sphere. Showthat reflectionsin the sides of such a triangle, and their compositionsform a finite set of isometries of the sphere.Hint: Compare with symmetries of suitable polyhedra.309. Let \177> 0 and u be real numbers suchthat \1772_ u2 = 1, and letT and T\177be the hyperbolic rotations about the x2-axis (Figure163)corresponding to the pairs (l, u) and (l,-u). Provethat T\177: T -1.
310. Prove that vectors tangent to the hyperbolic plane \177 in the
Minkowski space are space-like.Hint: Verify this when the point of tangency is P (Figure163),and
apply isometries.
311. Prove that the crosssectionof the hyperbolic plane \177 by a
plane in the Minkowski space, parallelto the tangent plane of \177 at
a given point, is a circle centeredat the given point, i.e. consists ofall points equidistant from it in hyperbolic geometry.

162 Chapter 4. VECTORSAND FOUNDATIONS
312. Prove that on the hyperbolic plane \177, the geometric locus of
points equidistant from a given line is the cross section of 7-g by a
pair of parallel planes centrally symmetricaboutthe origin.
313. Prove that every pair of points A and A \177on the hyperbolic plane
\177 is symmetric about the line, obtained as the intersectionof\177 with
the subspace of dimension 2 in the Minkowski space orthogonal to
the vector AA \177,and that this line is the geometric locusof pointsequidistantfromA and A(
314. Prove that an isometry of the hyperbolic plane that fixes threenon-collinear points is the identity, and derive from this that anyisometry of the hyperbolicplanecanbeobtainedby composing trans-
formations (\177, T, and S defined in \365151.
315.* Suppose that two lines on the hyperbolicplaneareobtained by
intersecting \177 with two subspaces of dimension 2 in the Minkowski
space. Describe the result of composing reflectionsabout theselines,if the intersection of the subspaces is: (a) time-like;(b) space-like;
(c) light-like.
316.* Prove that every ism\177aetry of the Euclidean or non-Euclideanplane can be composedofone,two, or three reflections.
317.* Prove that on the Euclideanor non-Euclidean plane, a straight
segment is the shortest path between its endpoints.
Hint: Show that every path connectingthe sameendpoints but
avoiding any given point of the segmentcan be replaced with a
shorter path passing through it.
Translator's Afterword
Three Controversies about
Mathematics,Geometry, and Education
What we think of mathematics, and how we teach and learn it (or not),
determines to a large degreethe placeit takes in our culture. Regardless ofwhat we think, mathematics enters our life by providing us with idealized
models of real phenomena and showing us how to deal with them logically
and creatively. At the end of a traditional course in elementary geometry,
a subject seen for centuries as the essenceof mathematics, it is temptingto examine whether what we think of it is true. Here is a brief summary of
the three (most influential in my opinion) common views of mathematics,and of geometry in particular:
* Mathematics is a relative wisdom; mathematical theorems, being log-ical consequencesof axioms, are representative of real world relationshipsonly to the degree that the axioms are.
* * A key virtue of mathematics (as well as the notorious difficulty of it)resides in the strict deductive nature of mathematical reasoning, as is best
demonstrated by elementary Euclidean geometry.
*** To offset the difficulty and provide for successin education, early
exposure to elements of Euclidean geometry is highly recommended.
Usually such viewsare conveyed to the broad educated audience via thehigh-schoolgeometry course, but they sound self-explanatory and uncon-
troversial anyway, and are readily endorsedby thosewho are professionallyaffiliated with mathematical education.
In thesenotes,we will see, drawing some examples from the main textof this book, that these views are essentially misleading, as they are eitheroutdatedor a resultof terminological confusion and mis-information aboutthe history and essence of mathematics, and that the direction in education
suggested by them is rather perverted.*
It is true that classical elementary geometry was developed by postu-lating basic properties of space in the form of axioms,and logically deriving
further properties from them. It is alsotrue that modern mathematics oftenrelies on the axiomatic method. It turns out however that what is meant by
axioms has changed. Nowadays, axioms are used for unification purposes,
i.e. in order to study severalsimilar examplesat once.Forinstance (\365140),
symmetricity and bilinearity are axioms defining an inner product, a notion
163

164 Translator'sAfterword
that unifies the Euclidean (\365140) and Minkowski (\365145) dot products. An-other example: the eight axioms of a vector space (\365137) unify coordinate
vectors (\365142)with geometric ones (\365119)..
Studying properties of several similar objects at onceis a very common
method, and one sure way by which mathematics saves effort (using anexpressionof Ron Ahm'oni [15]) and thus becomes useful. Axioms here are
simply part of a definition, i.e. a convention which calls an objectby such-
and-such a name if it possesses the requiredproperties;in mathematics they
are not \"self-evident truths accepted without proof,\" as the conventionalwisdom would have it. For instance,the definition of regular polyhedrain \36584 is axiomatic, as opposed to the constructive description of the fivePlatonic solids given in \365\36585-86. The theorem of \36587 illustrates the use ofthe axiomatic method for purposes of classification (of regular polyhedra,in this example).Similar applications are found in \365142 (\"uniqueness\" of
Euclidean geometry) and \365\365149-151 (characterization of isometries).
It often happens that general results and concepts of mathematics, ini-
tially motivated by known examples, are successfullyapplied in unexpected
ways to new situations. The alternative scenario: an axiomatic theory de-veloped with no examples known to satisfy the axioms,is rather unusual.
Thus mathematics appears today not as a \"relative wisdom\" (where con-clusions hold if the axioms \177re satisfied) but as a science motivated bystudying important and interesting examples, for which the conclusionsdohold becausethe axiomsare satisfied. Such examples often come as math-ematical modelsof real phenomena. The most basic of these models deal
with comparing finite sets of objects, and the correct way of manipulat-ing them is not decided by any system of axioms. It is learned (even by
advanced mathematicians) through the tedious processof counting- inchildhood.
Then what about classicalEuclidean geometry? The way it was devel-oped seemstoday quite similar to some advanced branches of theoretical
physics, notably string theory. Sometimesphysicsgoesbeyond of what isknown in mathematics and needsmathematical models that are not avail-able. Then physicistsuse heuristic methods: they postulate the existenceof certain modelswith certain properties, and prescribe certain rules of
manipulating them, even though there is not a single example that fits thedescription. This is similm' to how non-Euclidean geometry first emerged
in the work of Lobachevskyand Bolyai (\365134). Later, if physicists' expec-tations turn out to be reasonable, mathematicians construct the requiredmodels,such as the hyperbolic (\365146)and projectire (\365144) planes in thecase of non-Euclidean geometry. But until then, heuristic methods prevailin describingphysical reality.
This is how space is describedin classicalEuciidean geometry, both inantiquity (see \365133) and in modern age (Book I, \365\3651-5). One would examinethe images of a stretchedthread, a light ray, or the surface of a pond ordesk, introduce infinitesimally thin and infinitely spread idealizations oftheseobjects,postulate those properties of lines and planes which appem'
obvious from the heuristic point of view, and then obtain further properties

Mathematics, Geometry, and Education 165
by reasoning.The readercan checkthat this was the way the foundationsof geometry were treated by Euclid [1]. The physicists'heuristic approach
to the foundations of elementary geometry worked well for mankind for overtwo millennia. This approach should suffice even today for anyone studyingthe subject for the first time.
**
According to the author of a modern Russian textbook [9], \"Geome-
try is a subject for those who like to dream, draw and examine pictures,and who are good at making observations and drawing conclusions.\" Ac-cording to an expertat a homeschool math blog popular in the U.S., \"high
school geometry with its formal (two-column)proofs isconsideredhard and
detached from practical life.\" Sounds different? How come?
This time, it is geometry that means two different things. In various
countries, at different periods, the same new current in math educationemerged. The main idea was to bring high-school mathematics to a level
contemporary to the 20th century. In geometry, it meant introducing set-
theoretic terminology and emphasizing the role of geometric transforma-
tions. In Russia, Kolmogorov'sreform took place in late seventies, and wasimmediately recognized as a failure (which seems to be the fate -- for avariety of causes-- of all reforms in education). It did affect the quality ofinstruction, but it shook only slightly the status of geometry as the mostinspiring part of the math curriculum. The analogous reform in the U.S.,which took place in the sixties and was dubbedNew Math, was accompa-nied also with the intention of introducing mathematics \"the correct way\"
right from the start (asopposed to raising the level of abstraction in stages).For geometry this meant: to erect it on a rigorous axiomatic foundation.
The searchfor a solid foundation for geometry has played an important
role in the development of mathematics (see\365134). As was mentioned in theprevious section,this problem emerges not in a first study of the subject,but later, when the building is already there and the question of what itstands on remains.Modern mathematics solves this problem by introducinggeometry through vector algebra (as it is done in \365\365136-141). The vector
approach is considered \"the royal road to geometry\": it is logicallysimple,and intuitively transparent, since vectors come from physics. It also bringsinto elementary geometry new problems and methods (see \365\365119-132), and
paves the road to more advanced mathematics, such as linear algebra.The New Math reform attempted to bring rigor into a beginner'scourse
of elementary geometry by following, albeit loosely, Hilbert's axiomatic
approach (\365135). Apparently, Hilbert's monograph [2]was misconstruedasa contemporary exposition of elementary geometry. In fact this workplayeda key role in forming another branch of mathematics, mathematical logic,
but added little to classical geometry and nothing to modern. Moreover,
according to a leading French mathematician David Ruelle [12], \"Hilbert'sversion of Euclidean geometry without the help of (1) [visual experience
and intuition] and (2) [drawings]showshow hard the subject really is.\"
The focus of the post-New Math geometry courses falls, therefore, ondeductive reasoning,understoodas the task of meticulous conversion of by-

166 Translator's Afterword
potheses into conclusions. The format of two-column proofs is implementedto streamline the process(seean example in \365137): the left column is forwhat is claimed, and the right for why. In the genre of two-column proofs,
it takes several lines to fully justify even an obvious statement (e.g. that if
one angie formed by two intersecting lines is right then the other three an-glesthey form are also right). Instead of shortcutting to deepand beautiful
geometric results, these textbooks either cast these results away or renderthem in fine print, and dedicate whole chapters to formal proofs of trivial,
i.e. relatively obvious, facts.
In real mathematics, ancient or modern, there is no such thing as \"two-
column\" proofs (as opposed to \"paragraph\" ones), just as there is no divi-
sion of proofs into \"formal\" and \"informal.\" What, indeed, is a proof? Inscience,we want to know not only what is true but also why it is so, and aproof is an answer to the latter question. There is a subtlety though.
In mathematics, we systematically use the advantage of building newknowledge upon previously established facts (and this is yet another way
that mathematics saves effort). It is not prohibited even in math to useheuristic, plausible reasoning.Forinstance,onecan form many composite
numbers by multiplying a few primes, and so it seems plausiblethat prime
numbers should occur sparsely among all whole numbers. While there ex-ist mathematical theorems tha\177t make this intuition precise, the statementtaken too literally is expected to be false: according to the famous twin
prime conjecture, there are infinitely many pairs of primes that are only 2units apart, like 29 and 31, or 41 and 43. Clearly, deriving logical conclu-
sions from observations that are only roughly correct and admit exceptions,may lead to false results and contradictions. What is even worse, accordingto the rules of logic, a proposition \"A implies B\" is true when A is false.Hence,a single contradiction would rob one of the very means to obtainreliable conclusions by logic: if some A were both true and false, then sowould every B! The method of building towers of new conclusions uponpreviously established facts requires,therefore, that mathematical proposi-tions be stated in a form that would allow no exceptions whatsoever.Thus,the answer to the questionof why such a proposition is true should alsoexplain why it allows no exceptions whatsoever. Whenever an argument isneat enough to be convincing in this regard, it qualifies as a mathematical
proof.
Those who manage to evadethe burdenof two-column proofs and suc-ceed in studying elementary geometry know firsthand that mathematics canbe valuable or difficult not due to the neat reasoning involved (which doescome in handy at times), but because mathematical gemsreveal themselves
only when insight and ingenuity come into play.
To repair the damagemadeby the increasingly formal style and shallowcontent of high-school geometry courses, two remedies were invented.
The first one (apparently implemented in most U.S. high-schools) wasto abandon the whole subject of classical elementary geometry in favor

Mathernatics, Geometry, and Education
of elementsof analytical geometry and coordinate linear algebra. Thisapproach to geometry (see \365\365209-212 of Book I and \365\365142, 148 of Book II)is well suited for developing routine exercises and algorithmic techniques.A typical result for geometry instruction of this type is the ultimate loss of
the features, such as challengeand originality, that mark good science.
In the other approach,one intends to keep elementary geometry inschool (howeverformal and shallow, or even if only as an honors course)by
offering a preliminary, preparatory course of informal geometry (as opposedto rigorous one). While in some cases this becomes simply the return to
a traditional geometry course (similar to BookI), moreoften this means:
rendering math by examples, and \"without proof,\" i.e. dogmatically. Asa variation, somepopular textbooks of rigorous geometry realize the sameideaby exposing the reader to \"formal proofs\" only after introducing manygeometric facts in a series of chapters written \"informally.\" Both variations
fit a more general philosophy, according to which a high level of intellectualmaturity is required to succeedin studying classical Euclidean geometry,and to reach this level, gradual exposure to geometric ideas is proposed.Many modern math curricula adopt this philosophy and dedicateto ge-ometry substantial portions of study time in middle and even elementary
school. As we noted earlier, these ideas sound quite reasonable, so it isworth taking a look at where they lead.
It is important to realize that mathematics per se (as opposedto theway it is taught) is not inherently evil, and so if it avoids using some simplemethods, there usually are reasons for this. For example, it is not hard
to measure the sum of the anglesof a triangle and find that it is about180\370. What is not possible to do by such measuring is to figure out why
all triangles have the samesum of the angles, for one thing, because there
are infinitely many triangles, and for another, because that is actually false(see\365144) for triangles on the surface of the globe.Approaching geometry
informally (i.e. neglecting logical relations) makes it hard to determinewhat is true and why. In geometry education, this usually leads to thedogmatic style, and (what is even worse) mathematical knowledge beingsystematically replacedwith tautology. To illustrate the latter point, wediscussherethree exercisestaken from the chapter Geometric figures in apopularpre-algebratextbook[13].
(1) Classify each given triangle by its (given) angles. To \"classify\"
means to decide if the triangle is acute,right or obtuse. One should realizethat triangles are not inherently divided into acute, right or obtuse, but itis people who agreed to classify triangles this way. They did so in orderto expressgeometricknowledge, e.g. to answer the question: Does the
orthocenter of a given triangle lie insideor outside it? The answer is insidefor acute and outside for obtuse triangles. But the mere question aboutclassifying the triangles by angles is tautological,asan answer would contain
no geometric information beyond what is directly given.
(2) Find the measure of each angle of a regular pentagon, given thatthe sum of the measures of the angles of a pentagon is 540 \370. A totally
blind space alien who has no idea what polygons, angles or degrees are,

168 T\177anslatot's A\234tetwo\177d
will successfully answer this question if told that by the very definition aregular pentagon has five angles of equal measure: 540\370divided by 5 isequal to 108\370. Not only does this exercise require no information beyond
a definition, but it does not even require any visual interpretation of thedefinition. The same answer would involve non-tautological reasoning, if
the stun of the angles were not given.
(3) Find the perimeter of each polygon (with the lengths of the sideslabeledon a diagram).The perimeter, defined as the distance around afigure, is a favorite geometry topic of many elementary school cm'ricula.In fact this definition is merely an English translation of the Greekword
perimeter. A kindergartener, asked to find the length of the fence arounda lot with five sides of 1, 2,3,4, and 10 yards long, will be able to answer:1+ 2 + 3 + 4 + 10 = 20yards. Thus the difficulty of the wholetopicis purely
linguistic, namely in the use of a foreign word. To emphasize that solvingsuch exercisesis void of any geometric content, I chose unrealistic num-
bers: the pentagon, whose perimeter of 20 yardshasjust beensuccessfully
computed, cannot exist because of the triangle inequality (Book I, \36549).
Of course, conventions such as definitionsand notations are presentin
every mathematical text, since they are needed for expressing mathematical
knowledge. Unfortunately, geometric portions of typical elementary schoolcurricula are dedicated entirely to conventions and tautologies. This is not
just a result of poor realization of good intentions, since it comes framedas a certain ideology. Known as the van Hiele model,this ideologymeritsa brief description.
According to the van Hiele model,the ability of a learner to processgeometric knowledge is determined by the level of geometric abstractionachieved by this learner. At level 0, one is only able to identify geometricshapes (e.g.: this is a rectangle).At level 1, one is able to attribute prop-ertiesto shapes (e.g.: a rectangle has four right angles, and two diagonalsof the samelength).At level 2, one becomes capable of deriving relation-
ships between the properties (e.g.: if the four angles of a quadrilateral areright, then it must be a rectangle, and hence its diagonals have the same
length). At level 3, one is able to appreciatean entirelogicaltheory that
tracks all properties of geometric shapesback to axioms. At level 4, onecan freely navigate through and compare abstract axiomatic theories(suchas non-Euclidean geometries) not relying on geometric intuition. The main
point of the model is that, regardlessof age, a learner cannot progress tothe next level until he is firmly grounded in the previous one.
In the half century sinceits invention, this classification of five levelshas been the subject and the basis of many projects in education, andis considered a well-established classical theory. It is quite remarkable,therefore, that at a closer look the theory itself turns out to be almostentirely a tautology. For comparison, imagine a %heory\" claiming that
high-school students are divided into three categories: those who carry lessthan $20 in their pockets, those who carry from $20 to $100, and those whocarry over $100. One can develop a field study on a school'scampus and
confirm that %he theory works!\" In application to van Hiele's levels,such

Mathematics, Geometry,and Education
a field study has been conducted, and the resultsreportedin the book [14].The fact that the classification into van Hiele's levels, however smart andelegant, is merely a definition, and so it cannot be confirmed or disprovedby any experiments, seems to escape, somehow, the researchers'attention.
The part of the van Hiele model that can be true or false (and hence is
capable of carrying knowledge)consistsof the claims that a learner of geom-
etry cannot reach the next level while bypassing the previous one. These arefour essentially independent claims (about reaching levels1,2,3,and 4). In
fact the last two are true tautologically, simply because many is more thanone. Indeed,operating with axiomatic theories (level 4) includes operatingwith one of them (level 3). Likewise,deriving all properties of geometricfigures from axioms (level 3) includes deriving some properties from oth-
ers (level 2). What remains are the assumptionsthat before attempting
a rigorous geometry course one has to go through two preliminary stages:first becoming familiar with basic geometric shapes, and then learning todiscerntheir mathematical properties intuitively. These assumptions areused to justify the ways geometry is presented throughout elementary andmiddle school,and so they are important.
A beginner's experience with geometric shapes should not be taken
lightly, since it is one of two primary places where mathematics meetstherealworld (the other one being counting). All basic notions of geometry aresomehowabstractedfrom this experience. The trouble is that the experi-enceis often confused with the skill of naming shapes correctly: \"this is atriangle, and this isa square.\" Educational psychologists illustrate a typical\"di\177culty\" with this example: a beginner would not recognizea squareas a(specialcaseof) rectangle, but would classify it as a distinct shape. In factthe beginnerisright: a square is a special case of rectangle not intrinsically,
but only by convention, while by another convention (see BookI, \36596) a
parallelogram is not considered a specialcaseof trapezoid. A convention isnot something one can figure out. In mathematics, giving names to objectsis the function of definitions, not theorems. Likewise, in real life, focusing
on how things are called is void of any knowledge about them, and is inthis sense meaningless. Here are some examples of meaningful questions.
1. Why are doors and windows rectangular and not triangular? (Tounderstand why, imagine how a triangular board with hinges would open.)
This question focuseson the propertiesof objects as determined by theirshapes, whatever the names might be.
2. Why are sewer hole covers often shaped as disksbut rarely as squares .2The conventional answer to this question says that a square, turned side-ways in space, can fall into the hole it covers, but a disk cannot. This may
bring up another question: Are disks the only shapes with this property?
3. How would a car move if the wheels were shapedas (regular)pen-tagons, or hexagons? Well, it would not move very smoothly. The wheelsare mounted to the car's axes by their centers, and what matters is that thedistance from the center to boundary points of the pentagon (or hexagon)varies. This question leads directly to the definition of a circle as the locusof points on the plane equidistant from the center.
170 Translator's Afterword
4. A traditional technique of relocating buildings consists in placinground woodtrunks of the same diameter under a (raised) houseand rolling
it to a new place. Would the technique work well if the trunks had square
cross sections? In fact, what matters here is that a disk has the samewidth
in every direction, and the square doesnot. Are there figures of constantwidth other than disks?
Generally speaking, it is not easy to invent geometry questions that
arc meaningful yet elementary. What helps understanding (as opposed
to merely naming) geometric shapes is not classroomdiscussions but the
fact that shapes around us do matter. One learns what a right angle isby fitting a bookshelf and a sofa bed next to each other, and encountersparallelograms and trapezoidsby drawing buildings according to the rulesof perspective.
Finally, let us return to the idea that an informal approach to ge-ometry must precede the rigorous one. On the one hand, the statementsoundsself-defying. If one cannot begin with the rigorous approach, then,since this is a relatively new pedagogical theory, how did people manage
to learn Euclidean geometry in the previous two millennia? On the otherhand, it seems obvious indeed, that Euclidean geometry is demanding of the
lcarncr's intellectual maturity, including the ability to concentrate,think,
reason, mcct a challenge, rcad\177a book focusing on every detail, use conciseexpressionand precise terminology, etc.
The solution to this dilemma is very simple. The subject of Euclideangeometry does not lend itself to purely intuitive, non-rigorous treatment.
It begins where Euclid began: from describing basic properties of abstractpoints, lines,planes,and using imagination and logic in order to discoverand prove properties of geometric figures. To prepare oneself to study ge-ometry, anything that requires imagination and logic, apart from geometry
itself, is suitable. Mathematics of the elementary school becomes one sucharea, if studied not dogmatically but with full understanding of why it
works. Meaningful geometric content is very limited there, but in basicarithmetic, one needsto go through many dccp and subtle mathematicalideas in order to fully appreciate the decimalnumber system, standard algo-rithms, and operations with fractions (see To mention more: naturalsciences(e.g. the structure of electron shells in atoms, the periodic tableof chemicalelementsand genetics);computers and programming languages
(e.g. the robotic systemLEGO Mindstorm); the grammar of natural lan-guages;music and the theory of harmony; visual arts (e.g.origami); games
and puzzles (e.g. chess or the Rubik's Cube). Anything real, which isnot a tautology but is rich with genuine, deep, non-trivial knowledge andstructure,preparesone for studying geometry and more advanced mathe-matics. Everything fake: a substitute invented to facilitate instruction (be
it Informal Geometry or even Calculus),has the oppositeeffect.
Bibliography
[1] Euclid. The Thirteen Books of the Elements. Translated with intro-
duction and commentary by T. L. Heath.Vol. 1 (Books I-II), vol. 2(BooksIll-IX), vol. 3 (Books X-XIII): Dover, New York, 1956.
[2] David Hilbert, The Foundations of Geometry.Authorized translation
by E. J. Townsend. The OpenCourt, La Salle, Illinois, 1950.
[3] Reviel Netz. The Shaping of Deduction in Greek Mathematics: A
Study in Cognitive History. Cambridge University Press, 1999.[4] A. P. Kiselev. Kiselev's Geometry. Bookh Planimetry. Adapted from
Russian by Alexander Givental. Sumizdat, E1Cerrito,2006.
EditionsofKiselev'sGeometry the translation is based on:
[5] A. P. Kiselev.Elementary Geometry, for Secondary EducationalInstitutions. Part I: Planimetry. Part II. Stereomerry. First edition:Dumnov's Bookstore,Moscow, 1892.
[6] A. P. Kiselev. Elementary Geometry. Prosveshchenie, Moscow, 1980,1998.
Some ideas for additional exerciseswereborrowed from:
[7] V. B. Lidsky et al. Problems in Elementary Mathematics. Nauka,Moscow, 1967(in Russian).
[8] V. V. Prasolov. Problems on planimetry. Part 2. Nauka, Moscow,
1991 (in Russian).
[9] I. F. Sharygin. Geometry. Grades 10-11. Drofa, Moscow, 2007;Geometry. Stereomerry. Problems. Drofa, Moscow, 2000; Geome-try. Planimetry. Problems. Grades 9-11. Drofa, Moscow, 2001(inRussian).
[10]I. H. Sivashinsky. Problems in Elementary Mathematics. Nauka,Moscow,1966(in Russian).
[11]M.I. Skanavi (editor) Collected Mathematics Problems for TechnicalCollegeApplicants.Vysshaya Shkola, Moscow, 1988 (in Russian).
171
172 Index
Sourcesquotedin the Afterword:
[12] David Ruelle. Conversations on mathematics with a visitor from outerspace. http://www.ihes.fr/~ruelle/PUBLICATIONS/126imu.ps.
[13] M. Dolciani, R. Sorgenfrey\177 J. Graham. Pre-algebra. An accelerated
course. Houghton-Mifflin Co., Boston, 1989.
[14] D. Fuys, D. Geddes, R. Tischlet. The van Hiele model of thinking ingeometry among adolescents. Journal for Research in MathematicsEducation. Monograph No. 3, NCTM,1988.
[15]R. Aharoni. Arithmetic for parents. A book for grownups about chil-
dren's mathematics. Sumizdat\177 E1 Cerrito, 2007.

Index
5th postulate, 129
addition of vectors, 132additivity of dot product, 114altitude of cone,77altitude of cylinder, 76altitude of frustum, 32
altitude of prism, 30altitude of pyramid, 31
altitude of spherical segment, 91angle between line and plane, 21angle between lines,20anglebetween planes, 18
angle between skew lines, 20angle on hyperbolic plane,150antiprism, 72, 74
apothem, 32Archimedean solids, 72
Archimedes' axiom, 131
area, 152area of sphere, 93
area of spherical frustum, 93
area of spherical segment, 93associative,109associativity, 111, 120
axial cross section, 86axiom, 128,132axiom of completeness, 131axiom of dimension, 134axioms of order, 130axis of revolution, 75
axis of symmetry, 61
ball, 88barycenter,119baseof cone, 77
base of conical frustum, 78
base of cylinder, 76
base of prism, 30
base of pyramid, 31base of spherical frustum, 91base of spherical sector,96base of spherical segment, 91bases of frustum, 32
bilateral symmetry, 61bilinearity, 137box, 31
Cartesiancoordinate system, 141
Cartesian projection, 20Cauchy-Schwarzinequality, 138
Cavalieri's principle, 45center, 88center of homothety, 52
center of mass, 119center of symmetry, 59
central symmetry,, 59Ceva's theorem, 122circle,161circumscribed prism, 77
circumscribed pyramid, 78circumscribedsphere,103collinear, 123
common notion, 128commutative, 109composition,138,154concurrent, 37
cone, 77congruent dihedral angles, 17congruent figures, 129, 138conical frustum, 78conical surface, 77consistency,144convex polyhedral angle, 23convex polyhedron, 29coordinateEuclidean space, 142
173

Index
coordinates, 141cube,31cuboid, 31
curved surface, 78cylinder, 76cylindrical surface, 76
definition, 128
Desargues' theorem, 127development, 81diagonal of polyhedron, 29
diagonal plane, 31diameter, 88difference of vectors, 111
dihedral angle, 16dimension (of space), 133
dimensions (of box), 31directedsegment,107directrix,76, 77
distance from point to plane, 12distributivity, 110, 111
dodecahedron, 67 \177
dome, 91
dot product, 112doubling the cube,59
edgeof dihedral angle, 16edge of half-plane, 16edgeof polyhedral angle, 23edge of polyhedron, 29element, 131elliptic,160equal vectors, 108
equation of plane, 153equivalent, 35, 39
Euclidean inner product, 137Euclideanvector space, 137
Euler's line, 118exterior, 16
face of dihedral angle, 16face of polyhedral angle, 23
face of polyhedron, 29fixed point, 156foot of perpendicular, 11foot of slant, 11frustum of pyramid, 32
generator, 75, 76
generatrix,75-77great circle, 89
greater dihedral angle, 17
half-plane, 16
head of directed segmem, 107hemisphere,89hexahedron,67higher order symmetry, 63Hilbert's 3rd Problem, 48Hilbert'saxioms,130homogeneity of dot product, 114homologous, 51homothetic figures, 52
homothety, 52homothety coefficient,52
hyperbola, 148
hyperbolic, 160hyperbolic plane, 149hyperbolic rotation, 159
hyperboloid, 149hyperboloid model, 149
icosahedron,67identity, 154
inner product, 137inscribed prism, 77inscribedpyramid, 78
inscribed sphere, 103interior, 16reverse, 154isometry, 138,' 154
Klein model, 143
lateral edgeof prism, 30
lateral edge of pyramid, 31lateral face of prism, 30lateral face of pyramid, 31lateral surface, 91
lateral surface area, 35, 78lateral surface of cone, 77
lateral surface of cylinder, 76length, 151
lie between, 130light cone, 148
light-like vector, 148line, 128,134line of centers, 103

Index 175
line perpendicular to plane,10linear angle, 16
linear combination, 133linearly dependent, 133linearly independent, 133
lune, 145
mass, 119material point, 119
measure of polyhedral angle, 105measureof solid angle, 105Menelaus' theorem, 124meridian, 76meridional, 76
Minkowski inner product, 147Minkowski space, 147, 148multiplication, 110multiplication by scalars,132
net, 81, 82
net of cone, 83net of conical frustum, 83
net of cylinder, 82non-Euclideangeometries,129
oblique, 11
oblique cylinder, 76oblique prism, 30octahedron,67oppositevector, 132
opposite vectors, 111order of symmetry, 63
origin, 111, 134orthogonal projection, 20orthogonal vectors, 148
Pappus' theorem, 127parabolic, 160parallel line and plane, 4parallel planes, 5parallel postulate,129parallelepiped, 31
pentahedral angle, 23perpendicular, 10perpendicularcrosssection,35perpendicular lines, 20
perpendicular planes, 19plane, 134plane angle, 23
plane of symmetry, 60plane perpendicularto line,10plane surface, 128
Platonic solids, 67point, 128,134polyhedral angle, 23
polyhedron, 29postulate, 128prism,29,30product of scalar and vector, ll0projection, 20projectionof figure, 20
projection of slant, 12projective geometry, 126
projective plane, 146proportional vectors, ll0proposition, 129
pseudo-mass, ll9
pyramid, 31pyramidal frustum, 32
quadrangular prism, 30quadrangular pyramid, 32
radius,88radius-vector, 111, 134
rectangular parallelepiped, 31reflection, 155,157regrouping, 120
regular polyhedral angle, 66regular polyhedron, 66regular prism,30regularpyramid, 32
regular pyramidal frustum, 32regular tetrahedron,67relation,130represent the same vector, 108Riemann surface, 160right circular cone, 77right circular cylinder, 76right cylinder, 76
right dihedral angle, 17right prism, 30
rotation, 155
scalar, 132scalarproduct, 112
scissors-congruent, 48
176 Index
set, 131set of real numbers, 131
signed projection, 113similar, 56similar cones, 84
similar cylinders, 84similar figures, 56similar polyhedra, 51
skew lines, 4slant, 11slant to plane, 11smaller dihedral angle, 17solid angle, 102
solid geometry, 1space-likevector, 148
sphere, 88spherical frustum, 91spherical geometry, 144
spherical lune, 145spherical model, 146sphericalsector,96 \177
spherical segment, 91spherical surface, 88stereomerry, 1straight line, 128
subset, 131subspace, 133sum of vectors, 108
supplementary dihedral angles, 17surface, 128surface area, 35
surface of revolution, 75symmetric figures, 139
symmetric polyhedral angles, 26symmetricity, 137
symmetricity of dot product, 114symmetry about line, 61symmetry about plane, 60
tail of directed segment, 107
tangent balls, 103tangent cones, 86
tangent line, 91tangent plane,86,90tangent spheres, 103
test for perpendicular planes, 19tetrahedralangle,23tetrahedron,32
three perpendiculars,13time-like vector, 148
total surface area, 79-81translation, 54, 134,155triangle inequality, 140
triangular prism, 30triangular pyramid, 32trihedral angle, 23
undefinable notions, 130
unit dihedral angle, 18unit vector, 113, 141
vector, 108, 132vector space, 132
vertex, 77vertex of polyhedral angle, 23vertex of polyhedron, 29vertex of pyramid, 31vertex of solid angie, 102vertical dihedral angles,17vertical polyhedral angles, 26volume, 39volume of ball, 99volume of cone, 83volume of conical frustum, 83
volume of cylinder, 83volume of prism,44
volume of spherical sector, 98
weighted sum, 120
zerovector, 110
zone, 91
