gpgpu in medical imaging applications kevin gorczowski
Post on 19-Dec-2015
215 views
TRANSCRIPT

GPGPU in Medical Imaging Applications
Kevin Gorczowski
Overview
Random Walks for Interactive Organ Segmentation in Two and Three Dimensions
Interactive, GPU-Based Level Sets for 3D Brain Tumor Segmentation
Image Registration by a Regularized Gradient Flow
Accelerating Popular Tomographic Reconstruction Algorithms on Commodity PC Graphics Hardware
GPUs and Medical Imaging
Computations involving 2D and 3D images Already a natural fit for use of GPUs
Often involve numerical computations ODEs and PDEs Numerical accuracy not always top priority Visually correct and speed most important
Image Segmentation
Find the boundary or interior of a specific organ or structure
Hand-tracing still a standard clinical practice Example use: radiation cancer treatment
Take CT scan on initial day Segment organ Use segmentation to aim radiation Problem: organs move between days! Hand-tracing much too time consuming to do each
day
Random Walks for Interactive Organ Segmentation in Two and Three Dimensions (2005)Goal: Segmentation using only
small amount of user interactionUser specifies seed points
Seeds labeled according to organ/structure
Segmentation propagates toward seed points

Seed and Segmentation Examples
Seeds: gray Segmentations: black

Methodology
Unlabeled pixels (non-seeds) Send out random walker Determine probability that random
walker will reach a labeled pixel first, ahead of all other labels
Assign pixel maximum probability label
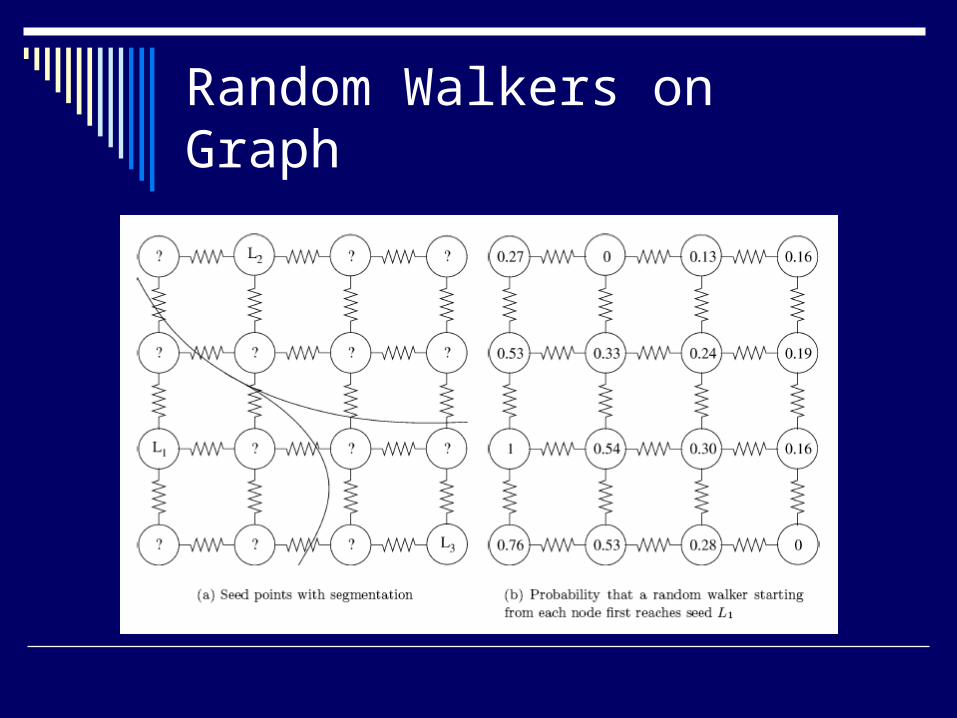
Random Walkers on Graph

Formulating Images as Weighted Graphs Nodes: pixels Edges: between neighboring pixels Edge weight: function of intensity
difference between pixel and its neighbor Weight function
g: pixel intensity, β: free parameter Able to use same β throughout
Solution
Probability of random walker reaching seed point same as solution to Dirichlet problem Partial differential equation on interior of region with
conditions at boundary of region Boundary conditions at seed pixels
1 if seed pixel belongs to label being searched for 0 otherwise
Computation of solution involves solving linear system with graph Laplacian matrix

GPU Implementation
Linear system LX = -BM must be solved for each seed label
Only M, seed boundary conditions, changes
Can use RGBA channels to solve for 4 labels simultaneously
Progress of segmentation can be updated on screen

GPU Implementation
L is symmetric and diagonal is determined by off-diagonal elements Can store L as size n = # of pixels, instead
of n x n Textures are same size as original images
Linear system solved using conjugate gradient Only matrix-vector product and vector
inner-product required


Interactive, GPU-Based Level Sets for 3D Brain Tumor Segmentation (2003) Uses deformable model approach Before, started with pixel seeds and
labeled pixels individually Here, start with template model of
organ/structure Deform model to fit target image Resulting model represents boundary

Deformable Models
Two classes of deformable shape models Parametric
Parameterized curves or surfaces Spherical harmonics, wavelets
Geometric Curves as embedded, implicit level sets of
higher-dimensional functions Can change topology (may or may not be
advantage depending on application)

Level Sets
Curve or surface: all points such that some function φ(x) = 0
φ: R3 -> R, x: position Can describe motion (deformation) as
PDE
v(t): pixel-wise velocities Implement deformations by choosing v’s
Velocities for Segmentation
Velocities usually have two components when used for segmentation Data term Smoothness term
Data term drives curve toward boundaries Typically areas of high contrast in image
Smoothness term constrains curve from becoming too irregular Prevents “leaking” out of small discontinuities in
image edges
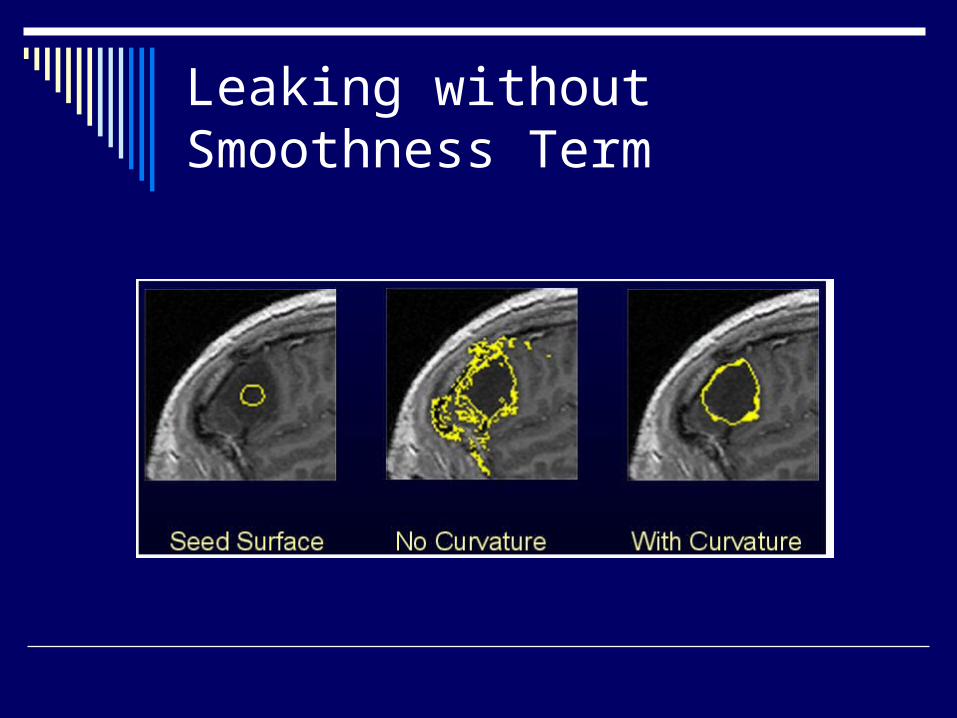
Leaking without Smoothness Term

Problems
Data term usually introduces free parameters Their data term: I: image intensity ε: determines range of values considered inside
object T: determines how bright object is Basically, T is mean intensity and ε is variance User has to choose these free parameters If segmentation runs at interactive speed
(GPU), user can be much more productive
GPU Implementation Issues
For stability, curve must move at most one pixel at each iteration Results in many iterations before solution Need to keep as much on GPU as possible
Major speedup if only places where φ is close to zero are considered How to pack for GPU Changes after each iteration

Data Packing
Subdivide data into 16x16 tiles Only tiles with non-zero derivatives sent
to GPU

Data Packing
Evaluation of PDE requires discrete derivatives Pixels need to access neighbors
CPU calculates and sends texture coordinates of neighbor pixels in packed format
GPU does neighbor lookups and finite differences used for gradient and curvature
CPU also sends vertices of active tiles for quad rendering

Data Packing
CPU needs to active tiles for each iteration so it can calculate neighbor pixels
GPU writes out a small (<64KB), encoded texture telling which tiles are active Checks if a tile boundary has been crossed
Limits CPU <-> GPU bus use

Performance
CPU: 1.7GHz Xeon 7-8 iterations/sec “Highly-optimized, sparse-field, CPU-based solver"
Radeon 9700 Pro 60-70 iteration/sec
Running time of GPU implementation scales linearly with number of active voxels
Overhead for feedback image calculation about 15% of total GPU time
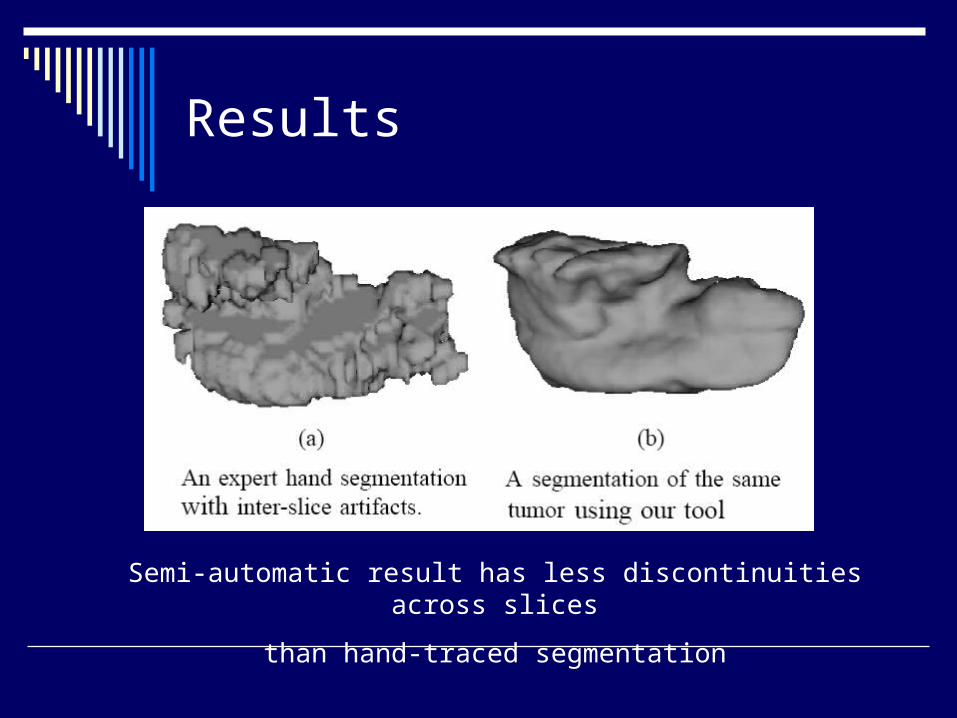
Results
Semi-automatic result has less discontinuities across slices
than hand-traced segmentation

Movies

Image Registration by a Regularized Gradient Flow (2004)
Image registration Try to get intensities in multiple
images to match spatially Simple case: use similarity
transforms to align images as best as possible
Complex case: non-rigid registrationEach pixel has its own displacement
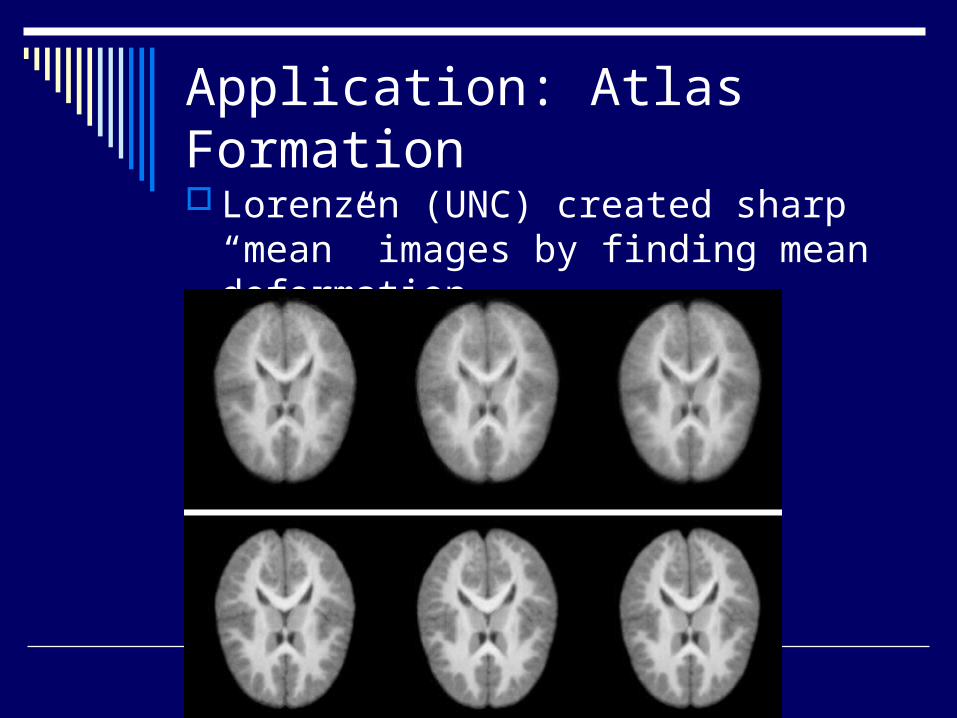
Application: Atlas Formation
Lorenzen (UNC) created sharp “mean” images by finding mean deformation

Registration Formulation
Must define a measure of how closely two images match
Can formulate as an energy function
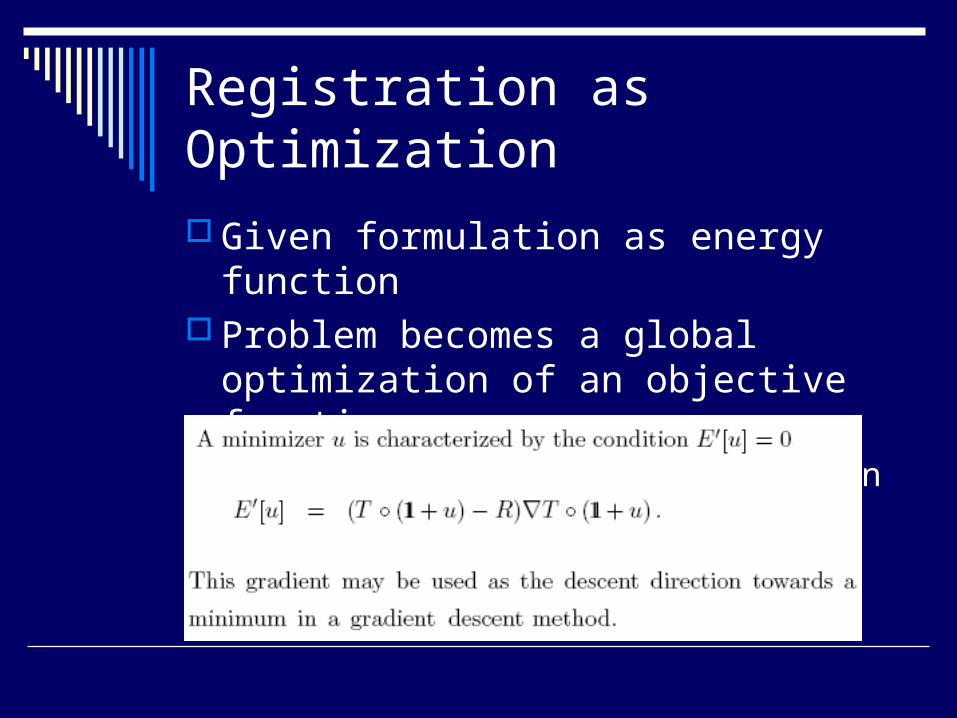
Registration as Optimization
Given formulation as energy function Problem becomes a global optimization
of an objective function Find minimum of energy function

Uniqueness of Solution

Discretization
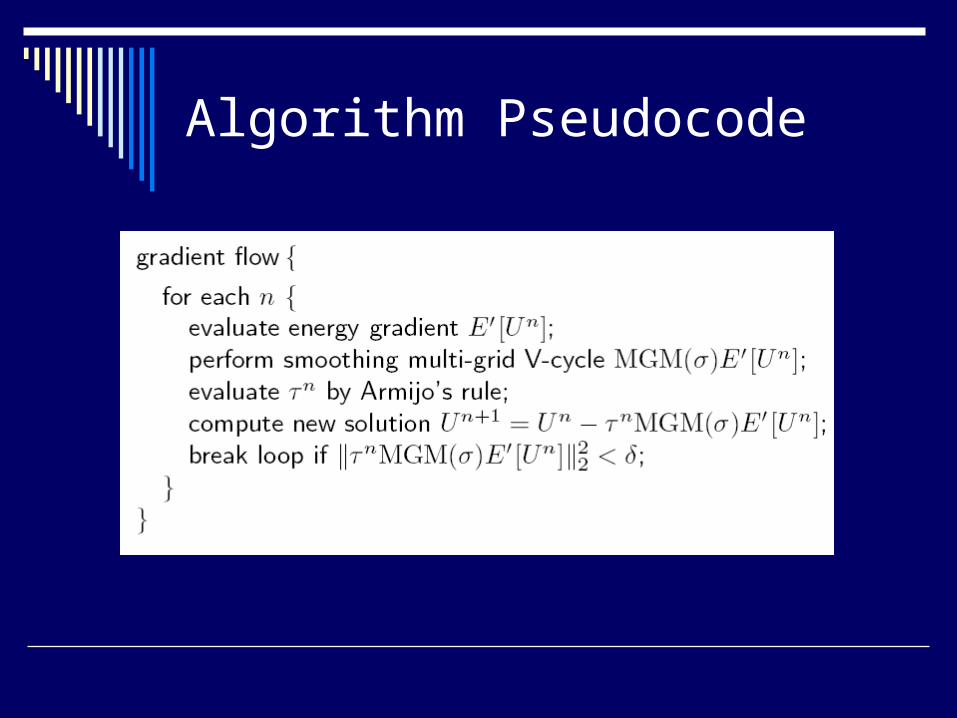
Algorithm Pseudocode

GPU Implementation

Results
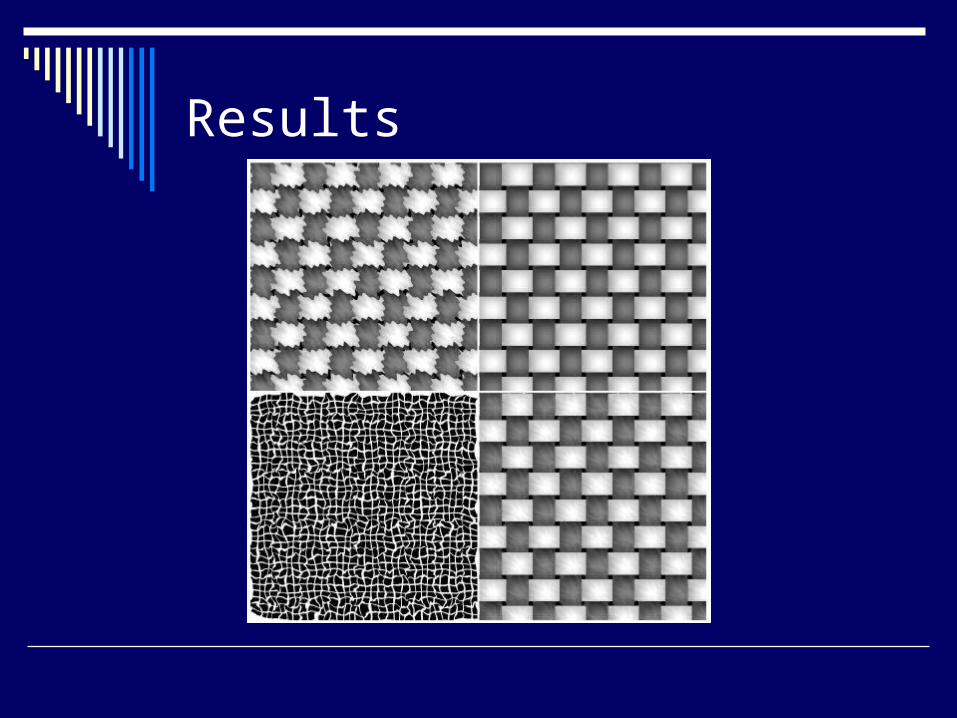
Results

Results
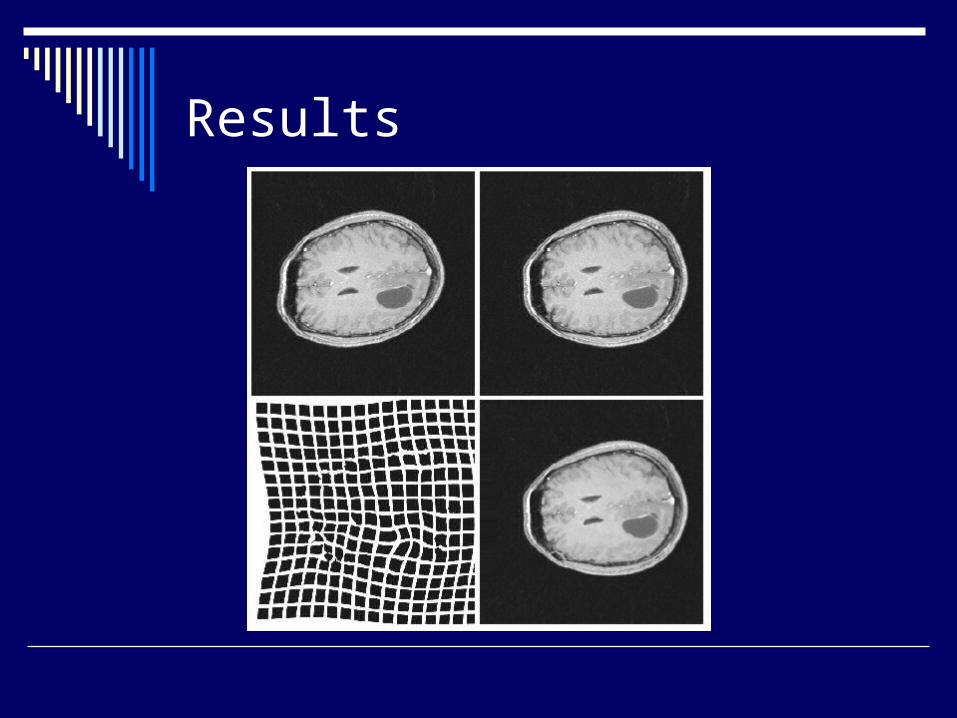
Results

Performance

Accelerating Popular Tomographic Reconstruction Algorithms on Commodity Graphics Hardware
Computed Tomography CT scan, used to be CAT scan
X-ray source Object attenuates x-rays Collector (2D sheet) measures
left-over radiation Source and collector rotate
around object

Reconstruction
Only information acquired through scan is 2D “image” at collector
Have collector image for each angle φ (position of source/collector on circle)
Must solve for attenuation of scanned object at points on 3D grid

Formulation
Amount of radiation collected at pixel (u,v) of collector for angle φ
μ: attenuation (unknown) Q0: original x-ray energy at source
L: distance between source and collector Integrate attenuation along x-ray

Formulation
Rewrite i: pixel index of
collector
Voxel form (loop
through object voxel
Grid)

Formulation
wij : weight of voxel j’s contribution to detector pixel i Determined ahead of time by interpolation
and integration rules

Solving for Attenuation
Mφ : number of pixels in collector for angle φ
Know qi and wij, solve for attenuation (backprojection)

Final Image Reconstruction
Feldkamp algorithm
SART iterative
algorithm
OS-EM algorithm

GPU Implementation
Each iteration requires at least one backprojection and projection
Each backprojection is O(n3) No real way around complexity Must use brute force speed
Many CT machines use FPGAs or ASICs Expensive Inflexible
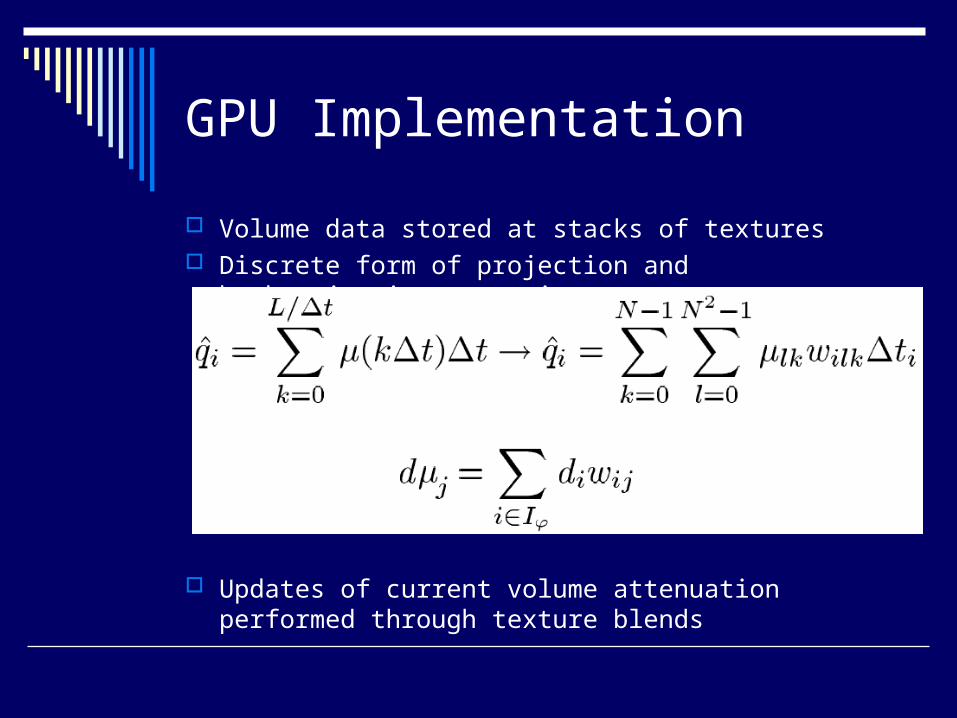
GPU Implementation
Volume data stored at stacks of textures Discrete form of projection and backprojection operations
Updates of current volume attenuation performed through texture blends
GPU Implementation
Can use RGBA channels to compute orthogonal projections Projection matrices are equal Four 90° increments of φ
Can’t do this in SART because of incremental volume updates Instead, fold volume in half (RG) Projection matrices are same except for
reflection

Results

Performance
References
Leo Grady, Thomas Schiwietz, Shmuel Aharon, Rudiger Westermann, "Random Walks for Interactive Organ Segmentation in Two and Three Dimensions: Implementation and Validation", Proceedings of MICCAI 2005, vol. 2, 2005, pp. 773-780.
Aaron E. Lefohn, Joshua E. Cates and Ross T. Whitaker, “Interactive, GPU-Based Level Sets for 3D Segmentation”, Proceedings of MICCAI 2003, vol. 2, 2003, pp. 564-572.
Robert Strzodka, Marc Droske, and Martin Rumpf. “Image Registration by a Regularized Gradient Flow - A Streaming Implementation in DX9 Graphics Hardware.” Computing, 73(4):373–389, 2004.
Fang Xu, Mueller, K. “Accelerating Popular Tomographic Reconstruction Algorithms on Commodity PC Graphics Hardware.” IEEE Transactions on Nuclear Medicine. Volume 52, Issue 3, Part 1, June 2005. pp. 654- 663.