grundlagen der regelungstechnik 04 - tams.informatik.uni ... · grundlagen der regelungstechnik...
TRANSCRIPT
Grundlagen der Regelungstechnik
Dr.-Ing. Georg von WichertSiemens AG, Corporate Technology, München
Termine
• Dies ist der letzte Termin in diesem Jahr• 17.12.2004 fällt aus• Nächste Termine: 14.1., 28.1., 4.2.
Wiederholung vom letzten Mal
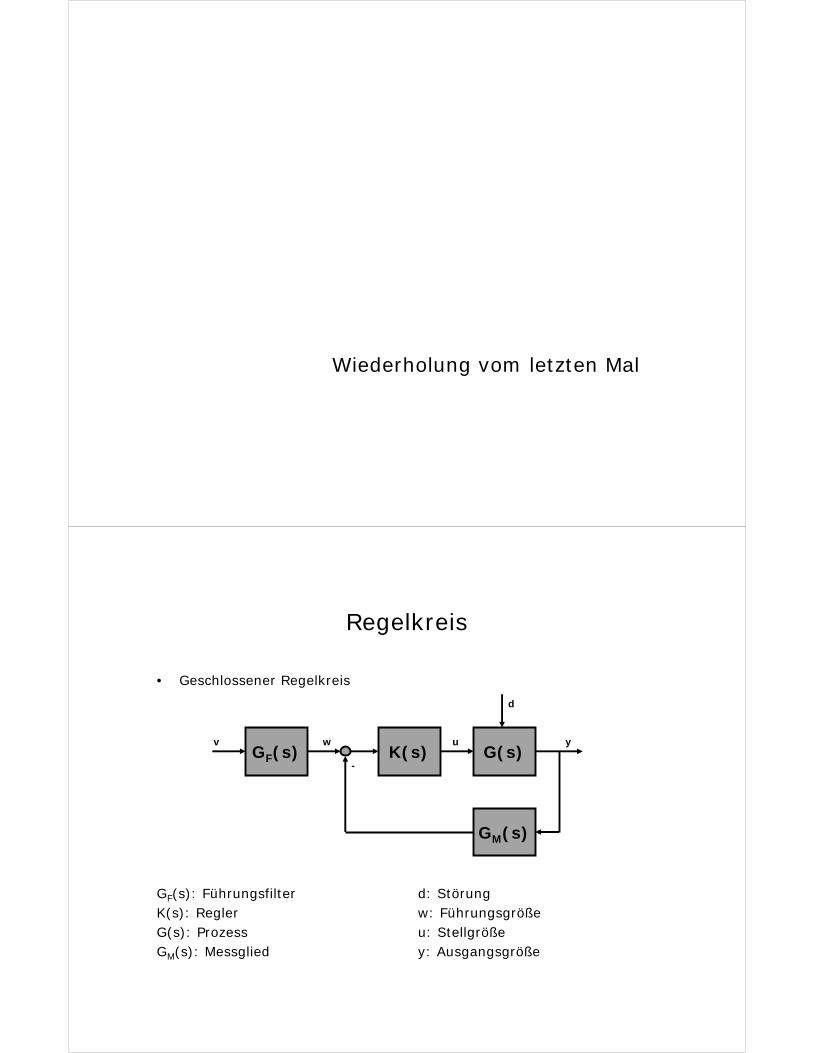
• Geschlossener Regelkreis
GF(s): FührungsfilterK(s): ReglerG(s): ProzessGM(s): Messglied
Regelkreis
d: Störungw: Führungsgrößeu: Stellgrößey: Ausgangsgröße
w u yGF(s) K(s) G(s)
GM(s)
d
v
-
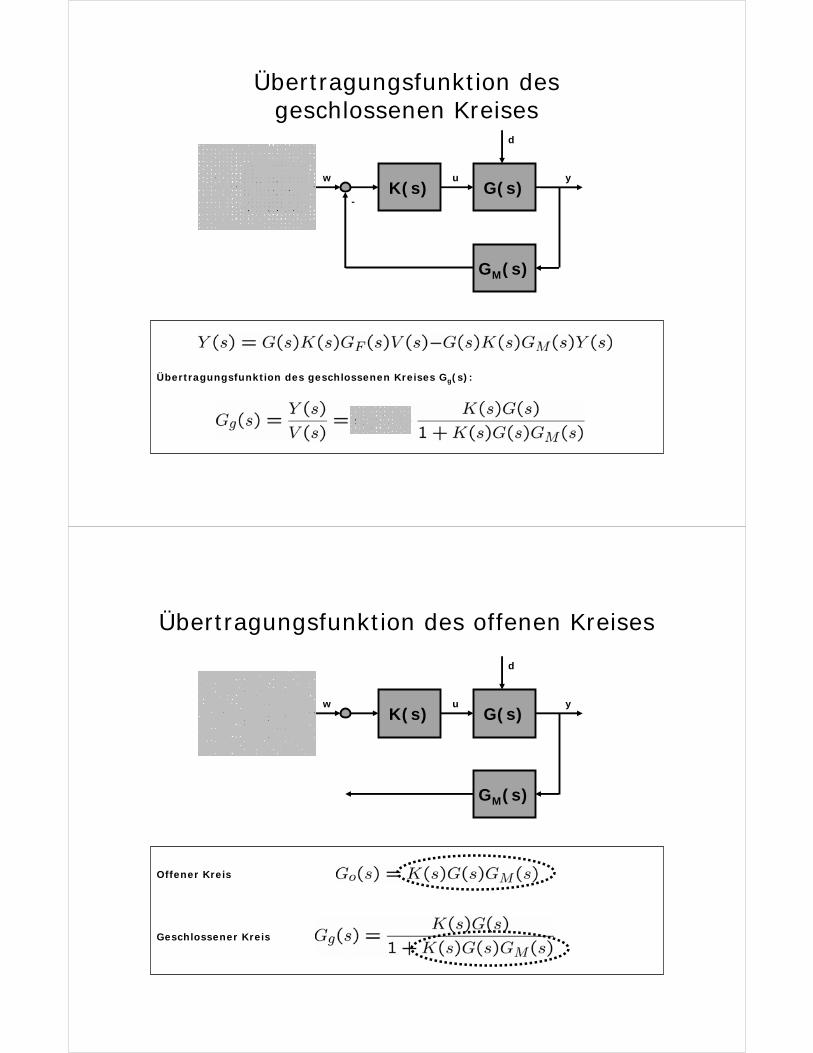
Übertragungsfunktion des geschlossenen Kreises
w u yGF(s) K(s) G(s)
GM(s)
d
v
-
Übertragungsfunktion des geschlossenen Kreises Gg(s):
Übertragungsfunktion des offenen Kreises
w u yGF(s) K(s) G(s)
GM(s)
d
v
Geschlossener Kreis
Offener Kreis
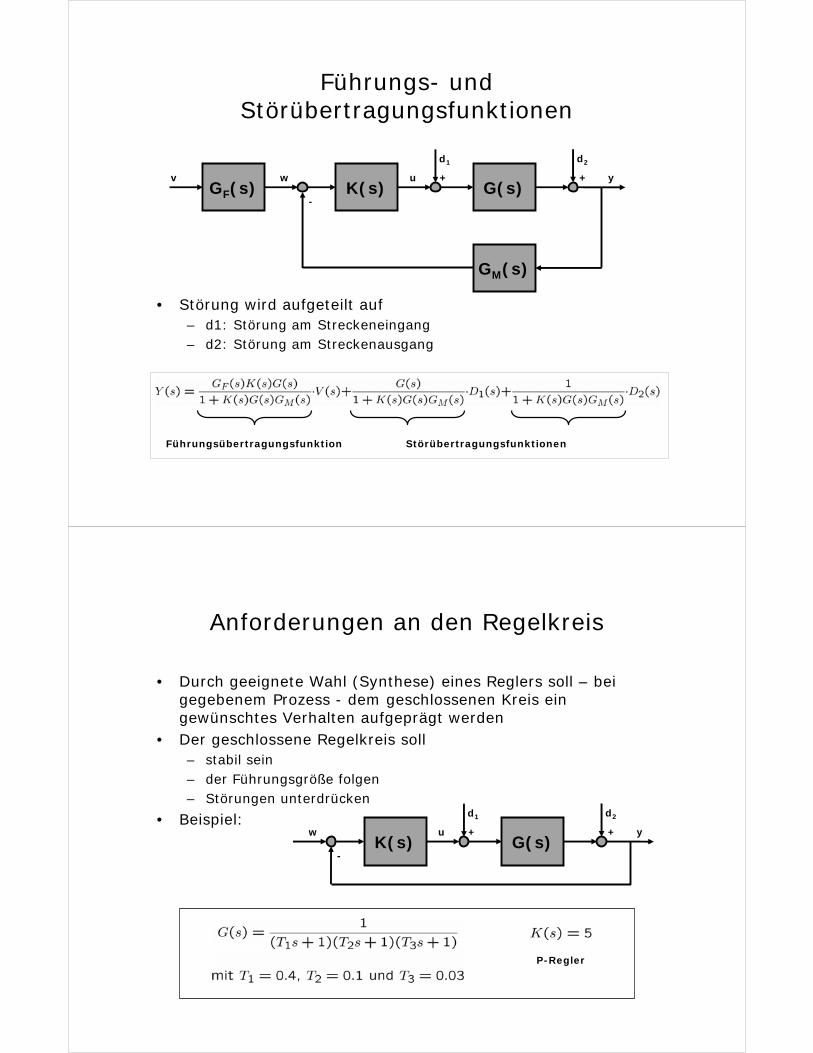
Führungs- und Störübertragungsfunktionen
• Störung wird aufgeteilt auf– d1: Störung am Streckeneingang– d2: Störung am Streckenausgang
w u yGF(s) K(s) G(s)
GM(s)
d1
v
-
d2
+ +
Führungsübertragungsfunktion Störübertragungsfunktionen
Anforderungen an den Regelkreis
• Durch geeignete Wahl (Synthese) eines Reglers soll – bei gegebenem Prozess - dem geschlossenen Kreis ein gewünschtes Verhalten aufgeprägt werden
• Der geschlossene Regelkreis soll– stabil sein– der Führungsgröße folgen– Störungen unterdrücken
• Beispiel:w u y
K(s) G(s)
d1
-
d2
+ +
P-Regler
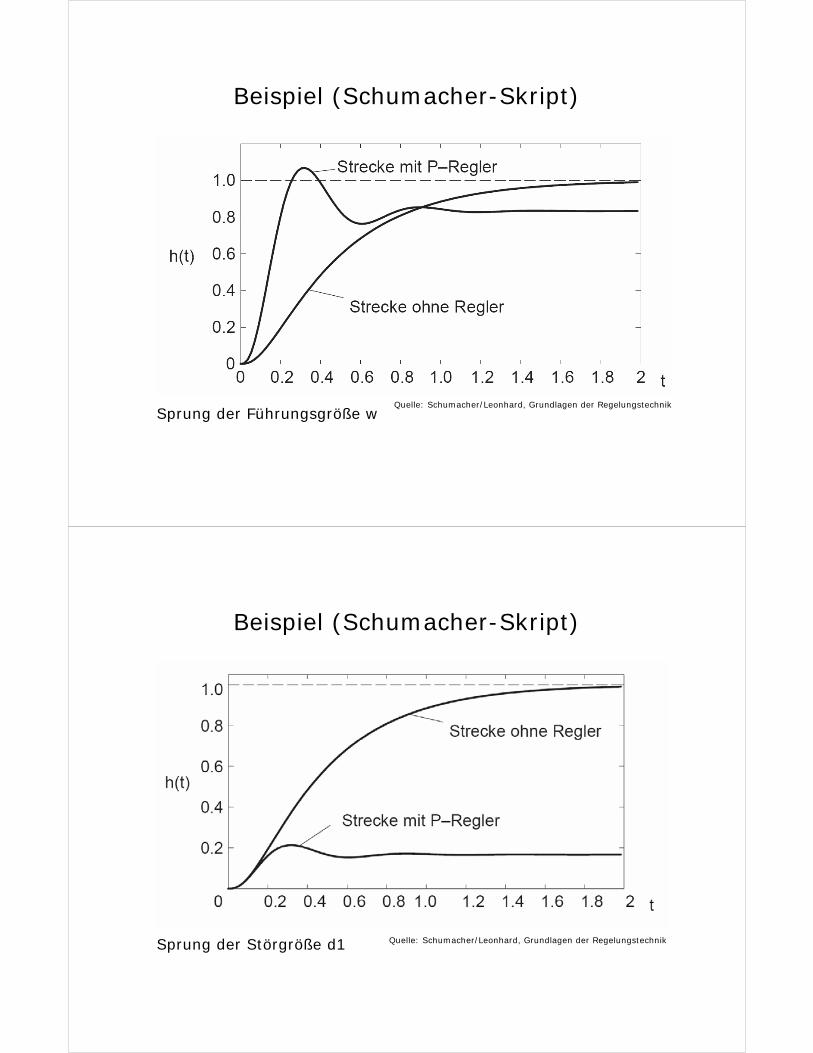
Beispiel (Schumacher-Skript)
Sprung der Führungsgröße wQuelle: Schumacher/Leonhard, Grundlagen der Regelungstechnik
Beispiel (Schumacher-Skript)
Sprung der Störgröße d1 Quelle: Schumacher/Leonhard, Grundlagen der Regelungstechnik
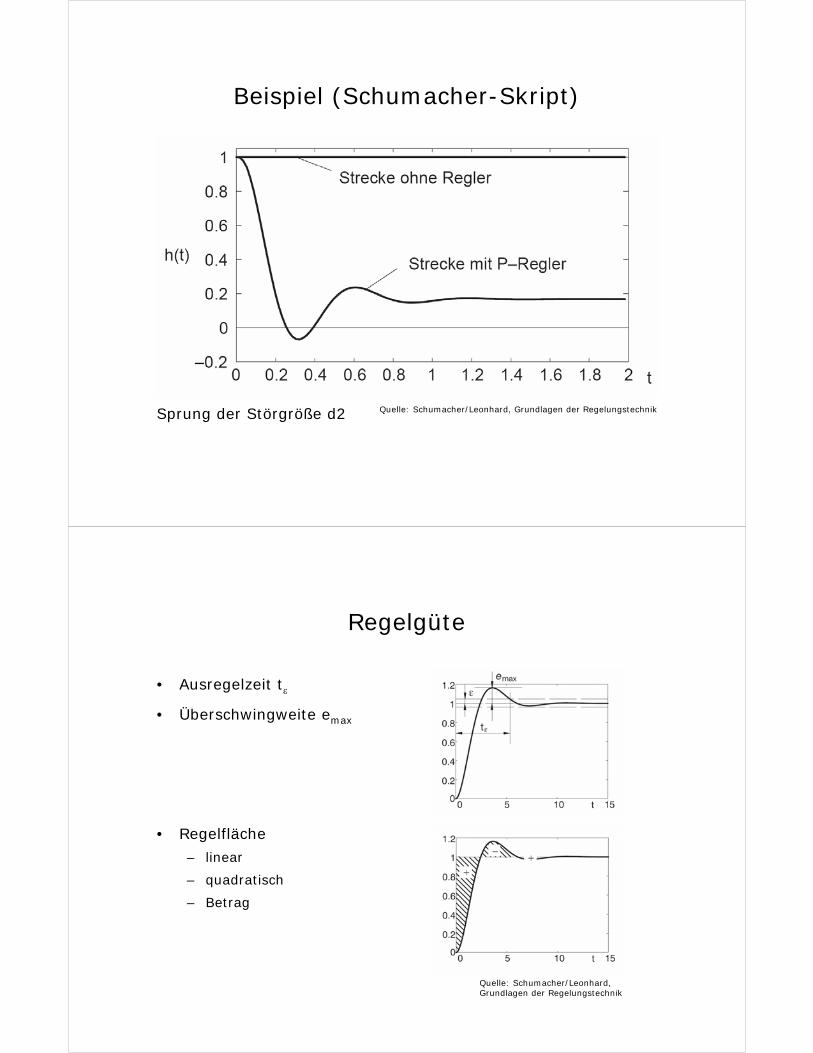
Beispiel (Schumacher-Skript)
Sprung der Störgröße d2 Quelle: Schumacher/Leonhard, Grundlagen der Regelungstechnik
Regelgüte
• Ausregelzeit tε
• Überschwingweite emax
• Regelfläche
– linear
– quadratisch
– Betrag
Quelle: Schumacher/Leonhard, Grundlagen der Regelungstechnik
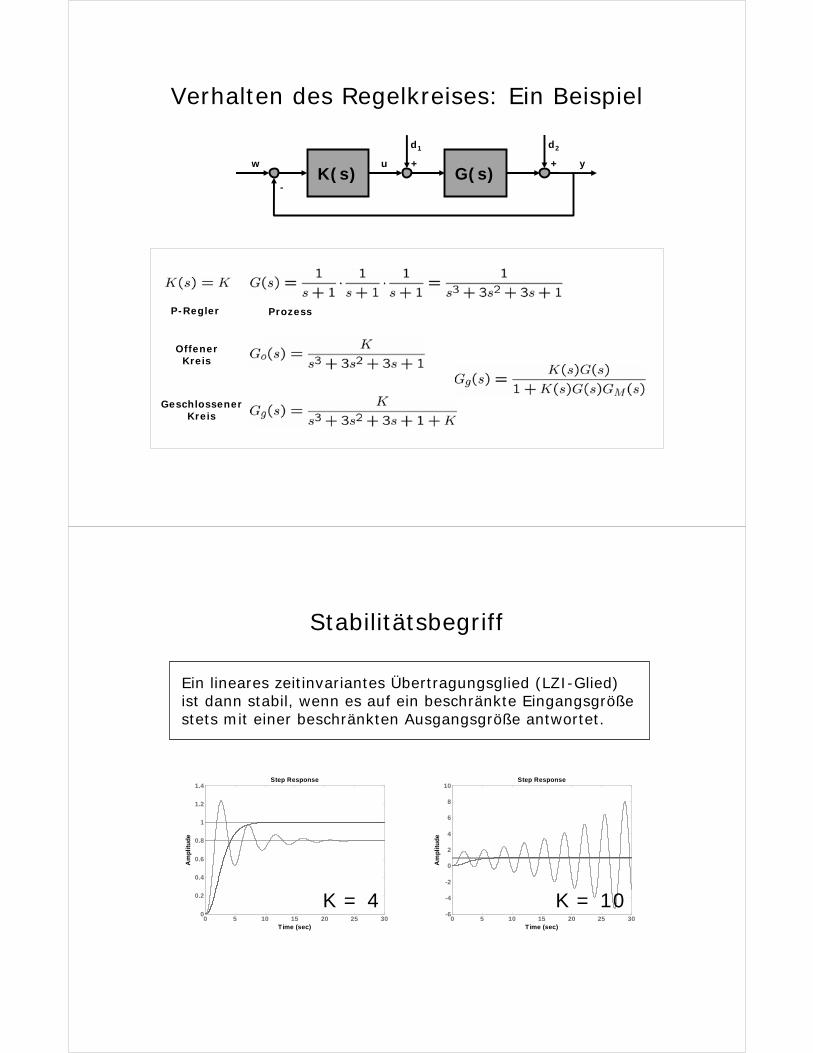
Verhalten des Regelkreises: Ein Beispiel
w u yK(s) G(s)
d1
-
d2
+ +
P-Regler Prozess
OffenerKreis
GeschlossenerKreis
Stabilitätsbegriff
Ein lineares zeitinvariantes Übertragungsglied (LZI-Glied) ist dann stabil, wenn es auf ein beschränkte Eingangsgröße stets mit einer beschränkten Ausgangsgröße antwortet.
Step Response
Time (sec)
Am
plit
ud
e
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4Step Response
Time (sec)
Am
plit
ud
e
0 5 10 15 20 25 30-6
-4
-2
0
2
4
6
8
10
K = 4 K = 10
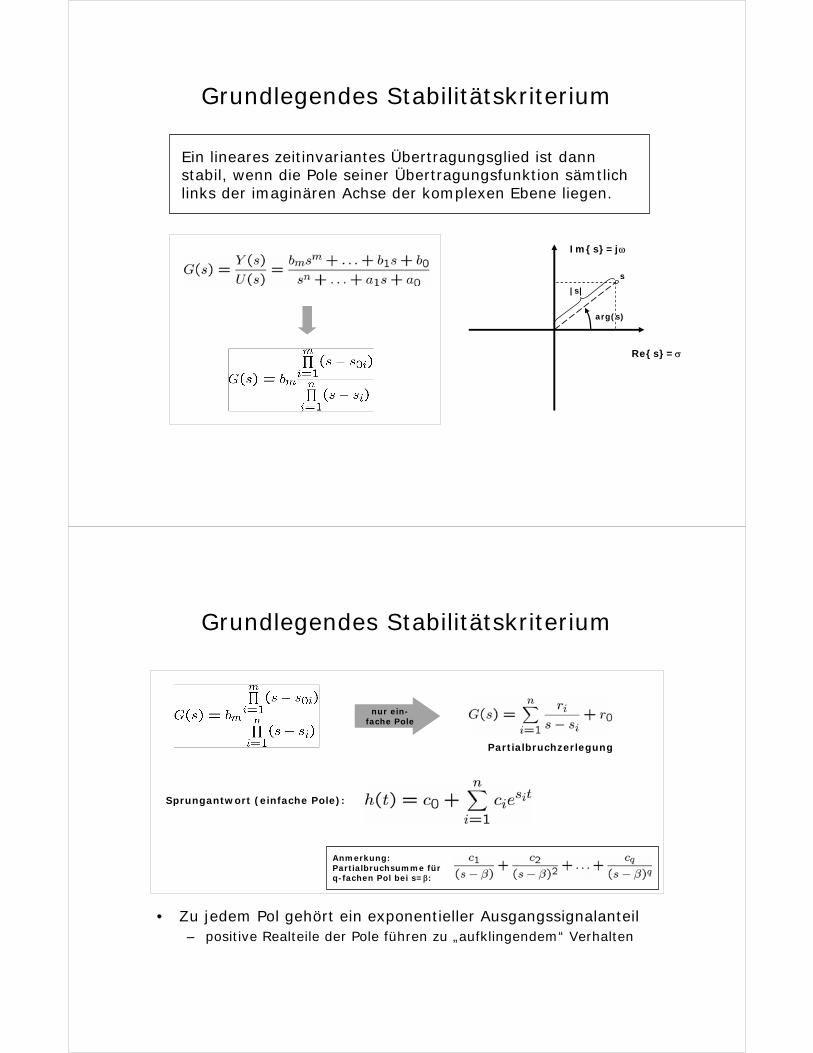
Grundlegendes Stabilitätskriterium
Ein lineares zeitinvariantes Übertragungsglied ist dann stabil, wenn die Pole seiner Übertragungsfunktion sämtlich links der imaginären Achse der komplexen Ebene liegen.
Re{s}=σ
Im{s}=jω
arg(s)
|s|
s
Grundlegendes Stabilitätskriterium
• Zu jedem Pol gehört ein exponentieller Ausgangssignalanteil– positive Realteile der Pole führen zu „aufklingendem“ Verhalten
nur ein-fache Pole
Sprungantwort (einfache Pole):
Anmerkung:Partialbruchsumme fürq-fachen Pol bei s=β:
Partialbruchzerlegung
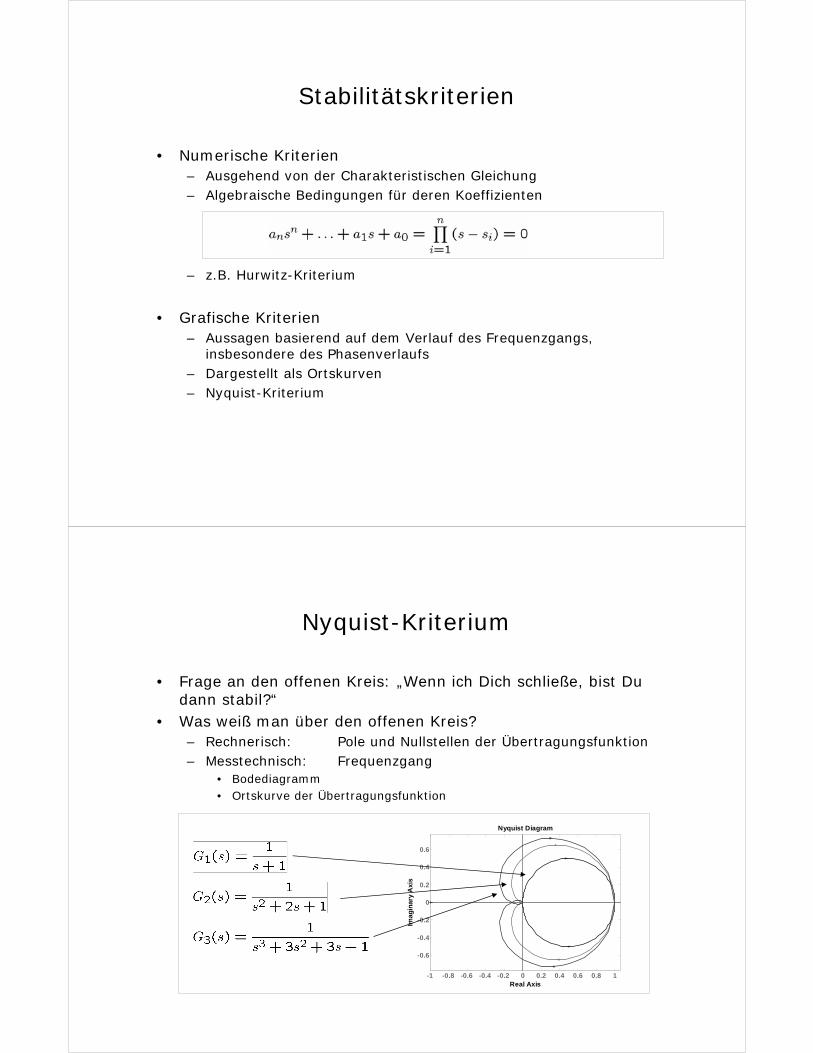
• Numerische Kriterien– Ausgehend von der Charakteristischen Gleichung– Algebraische Bedingungen für deren Koeffizienten
– z.B. Hurwitz-Kriterium
• Grafische Kriterien– Aussagen basierend auf dem Verlauf des Frequenzgangs,
insbesondere des Phasenverlaufs– Dargestellt als Ortskurven– Nyquist-Kriterium
Stabilitätskriterien
Nyquist-Kriterium
• Frage an den offenen Kreis: „Wenn ich Dich schließe, bist Du dann stabil?“
• Was weiß man über den offenen Kreis?– Rechnerisch: Pole und Nullstellen der Übertragungsfunktion– Messtechnisch: Frequenzgang
• Bodediagramm• Ortskurve der Übertragungsfunktion
Nyquist Diagram
Real Axis
Imag
inar
y A
xis
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
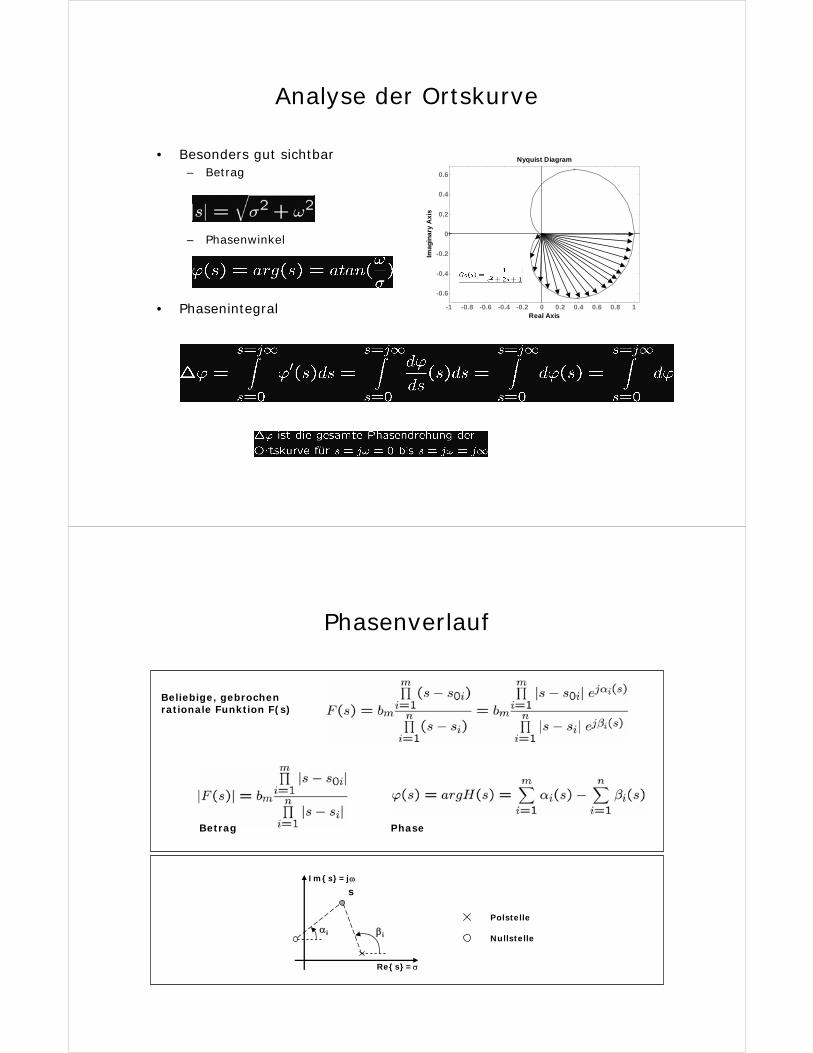
Analyse der Ortskurve
• Besonders gut sichtbar– Betrag
– Phasenwinkel
• Phasenintegral
Nyquist Diagram
Real Axis
Imag
inar
y A
xis
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Phasenverlauf
Beliebige, gebrochen rationale Funktion F(s)
Betrag Phase
αi βi
s
Re{s}=σ
Im{s}=jω
Polstelle
Nullstelle
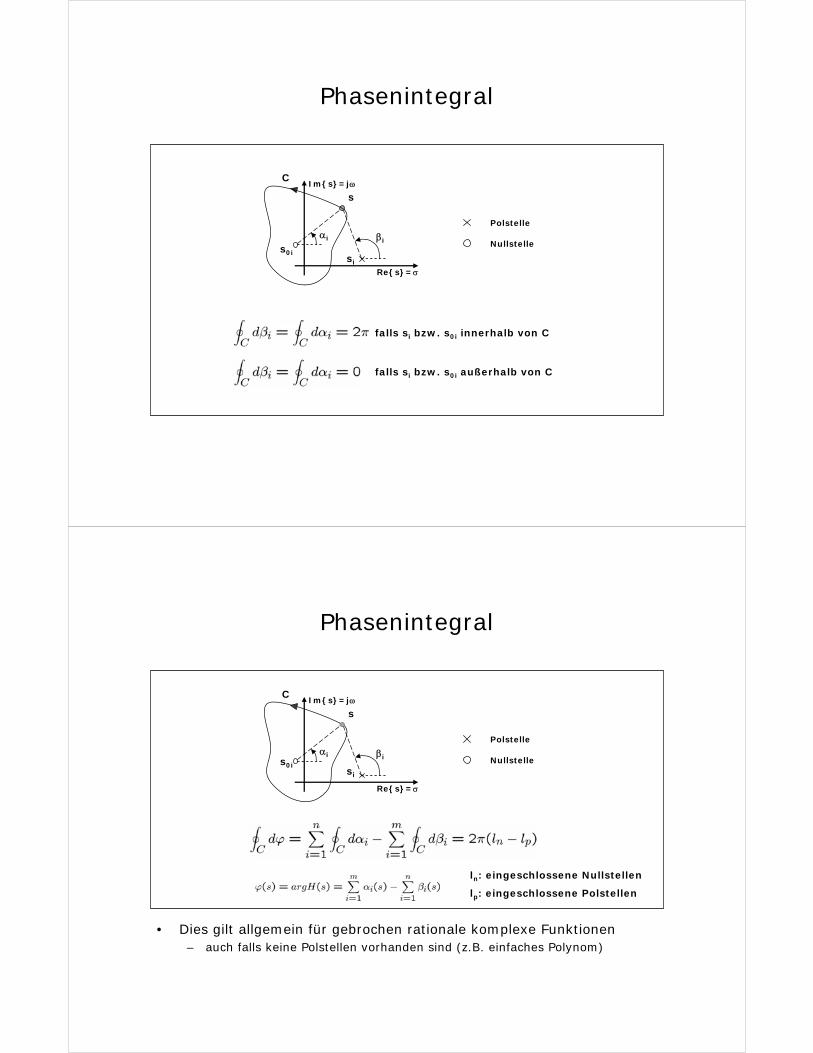
Phasenintegral
αi βi
s
Re{s}=σ
Im{s}=jω
Polstelle
Nullstelle
C
falls si bzw. s0i innerhalb von C
falls si bzw. s0i außerhalb von C
s0isi
Phasenintegral
• Dies gilt allgemein für gebrochen rationale komplexe Funktionen– auch falls keine Polstellen vorhanden sind (z.B. einfaches Polynom)
Polstelle
Nullstelle
C
ln: eingeschlossene Nullstellen
lp: eingeschlossene Polstellen
αi βi
s
Re{s}=σ
Im{s}=jω
s0isi
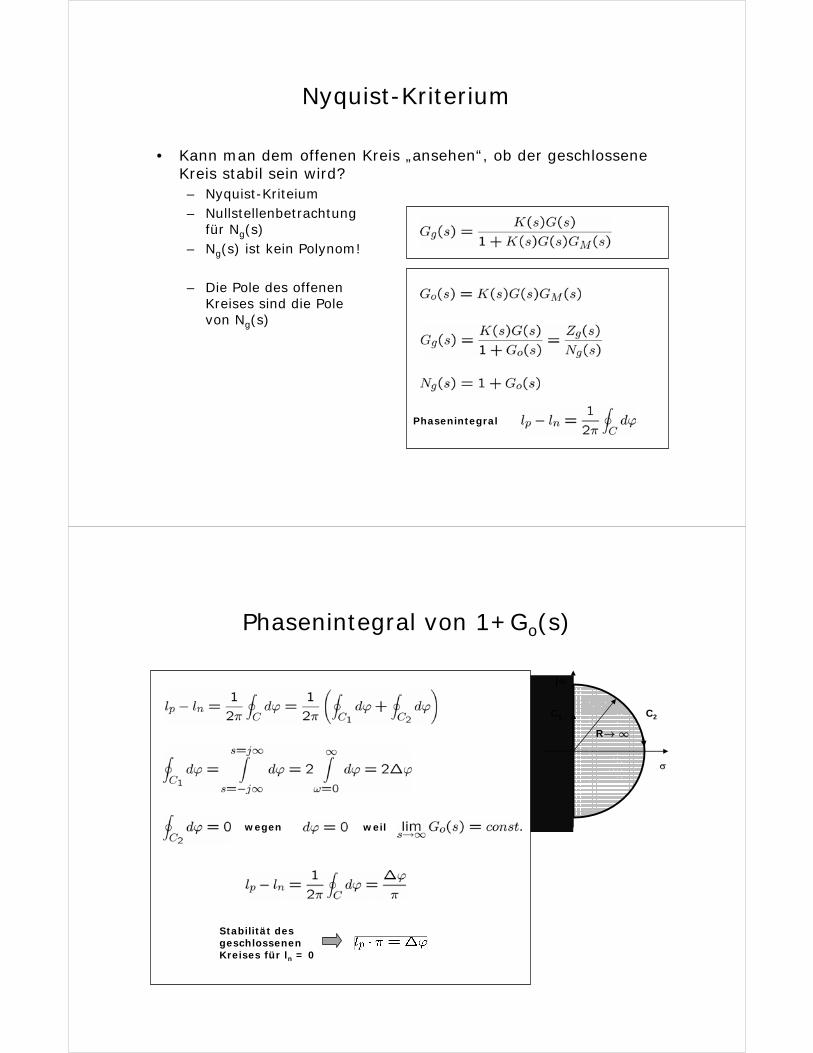
• Kann man dem offenen Kreis „ansehen“, ob der geschlossene Kreis stabil sein wird?– Nyquist-Kriteium– Nullstellenbetrachtung
für Ng(s)– Ng(s) ist kein Polynom!
– Die Pole des offenen Kreises sind die Pole von Ng(s)
Nyquist-Kriterium
Phasenintegral
Phasenintegral von 1+Go(s)
R→ ∞
σ
jω
C1 C2
wegen weil
Stabilität des geschlossenen Kreises für ln = 0
Nyquist-Kriterium
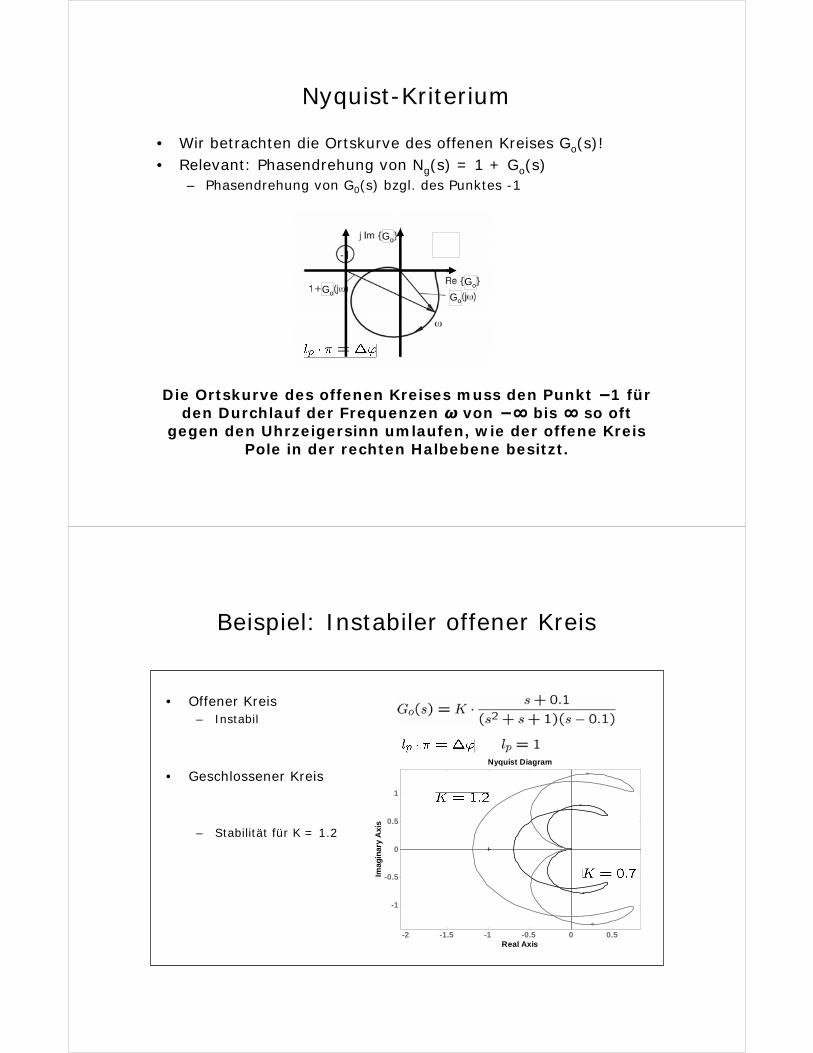
• Wir betrachten die Ortskurve des offenen Kreises Go(s)!• Relevant: Phasendrehung von Ng(s) = 1 + Go(s)
– Phasendrehung von G0(s) bzgl. des Punktes -1
Die Ortskurve des offenen Kreises muss den Punkt −1 für den Durchlauf der Frequenzen ω von −∞ bis ∞ so oft
gegen den Uhrzeigersinn umlaufen, wie der offene Kreis Pole in der rechten Halbebene besitzt.
Go
Go
Go
Go
Beispiel: Instabiler offener Kreis
• Offener Kreis– Instabil
• Geschlossener Kreis
– Stabilität für K = 1.2
Nyquist Diagram
Real Axis
Imag
inar
y A
xis
-2 -1.5 -1 -0.5 0 0.5
-1
-0.5
0
0.5
1
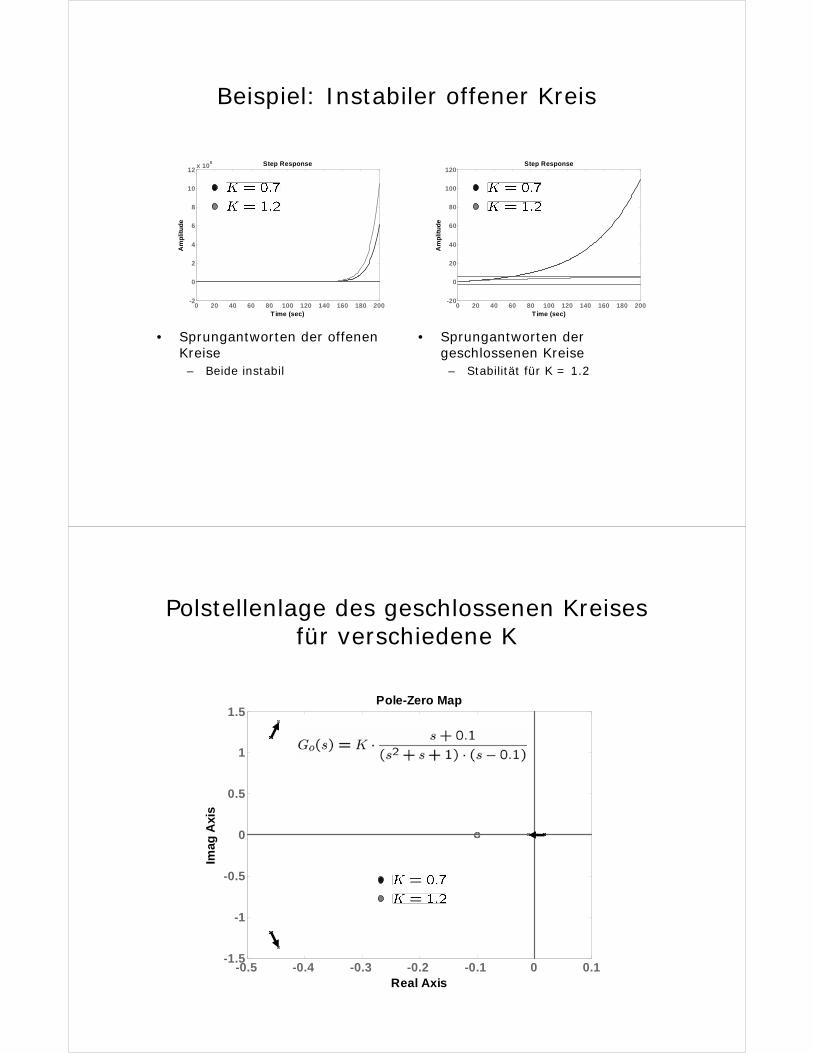
Beispiel: Instabiler offener Kreis
• Sprungantworten der offenen Kreise– Beide instabil
• Sprungantworten der geschlossenen Kreise– Stabilität für K = 1.2
Step Response
Time (sec)
Am
plit
ud
e
0 20 40 60 80 100 120 140 160 180 200-20
0
20
40
60
80
100
120Step Response
Time (sec)
Am
plit
ud
e
0 20 40 60 80 100 120 140 160 180 200-2
0
2
4
6
8
10
12x 10
8
Polstellenlage des geschlossenen Kreises für verschiedene K
Pole-Zero Map
Real Axis
Imag
Axi
s
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1-1.5
-1
-0.5
0
0.5
1
1.5

• Pole auf der reellen Achse werden umgangen mit r → 0
– Ohne Beweis: Stabilität für• la: Anzahl der Pole auf
der imaginären Achse
Nyquist-Kriterium für grenzstabile offene Kreise
Quelle: Schumacher/Leonhard, Grundlagen der Regelungstechnik
Nyquist-Kriterium für (grenz)stabile offene Kreise
Für (grenz)stabile offene Kreise gilt: Der Punkt -1 muss „links“ der Ortskurve des offenen Kreises liegen
Exakte Bedingung für die Phasendrehung:
lp: Instabile Pole des offenen Kreisesla: Grenzstabile Pole des offenen
Kreises
Quelle: Föllinger, Regelungstechnik
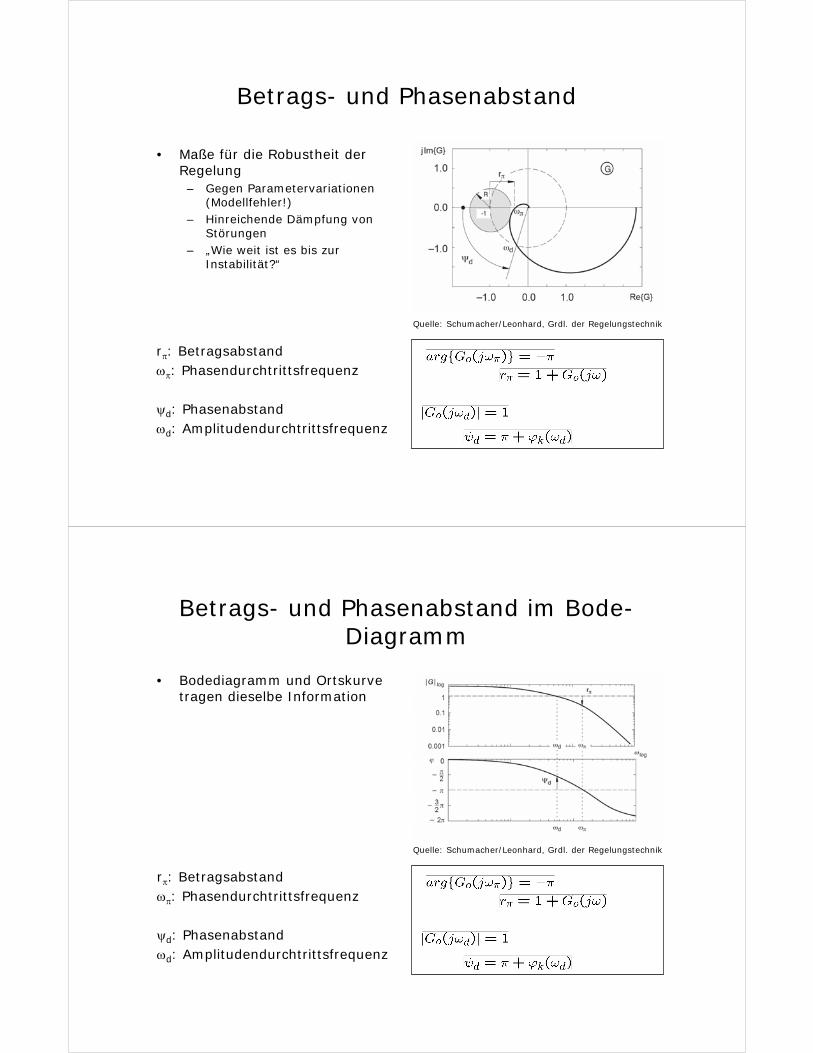
Betrags- und Phasenabstand
• Maße für die Robustheit der Regelung– Gegen Parametervariationen
(Modellfehler!)– Hinreichende Dämpfung von
Störungen– „Wie weit ist es bis zur
Instabilität?“
rπ: Betragsabstandωπ: Phasendurchtrittsfrequenz
ψd: Phasenabstandωd: Amplitudendurchtrittsfrequenz
Quelle: Schumacher/Leonhard, Grdl. der Regelungstechnik
Betrags- und Phasenabstand im Bode-Diagramm
• Bodediagramm und Ortskurvetragen dieselbe Information
Quelle: Schumacher/Leonhard, Grdl. der Regelungstechnik
rπ: Betragsabstandωπ: Phasendurchtrittsfrequenz
ψd: Phasenabstandωd: Amplitudendurchtrittsfrequenz