grundlagen der regelungstechnik 05 - tams.informatik.uni ... · grundlagen der regelungstechnik...
TRANSCRIPT
Grundlagen der Regelungstechnik
Dr.-Ing. Georg von WichertSiemens AG, Corporate Technology, München
Termine
• Nächste Termine: 28.1., 4.2.
Wiederholung vom letzten Mal
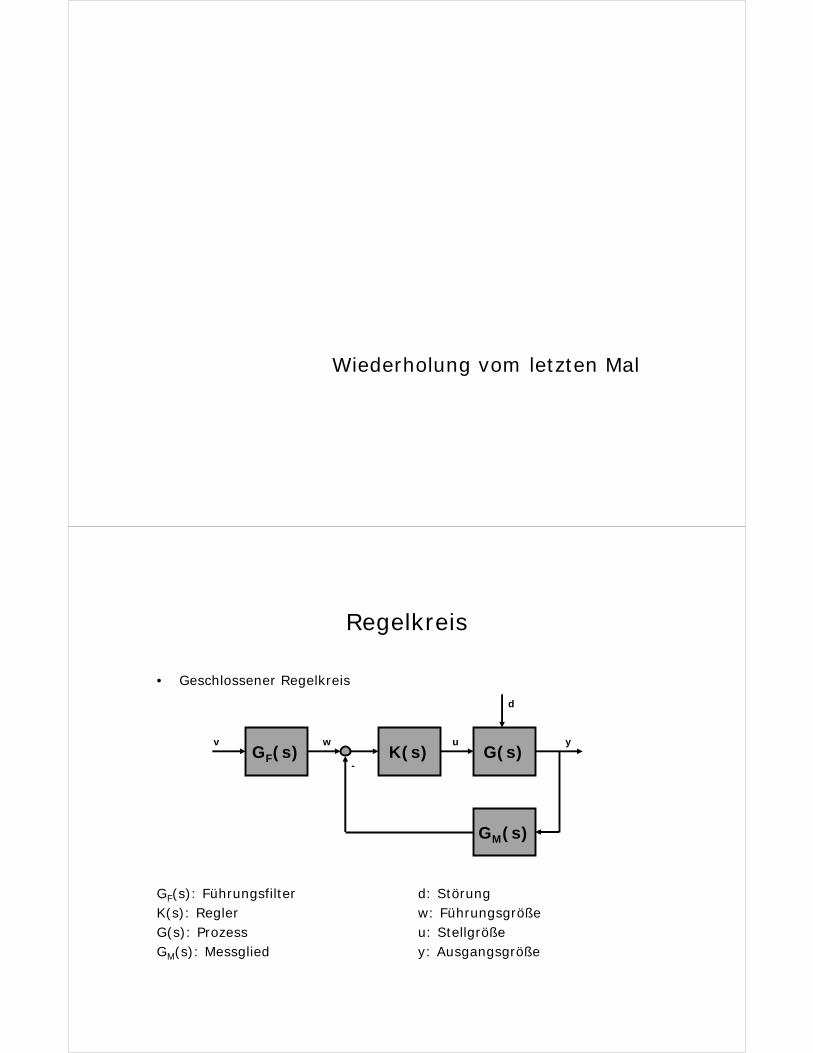
• Geschlossener Regelkreis
GF(s): FührungsfilterK(s): ReglerG(s): ProzessGM(s): Messglied
Regelkreis
d: Störungw: Führungsgrößeu: Stellgrößey: Ausgangsgröße
w u yGF(s) K(s) G(s)
GM(s)
d
v
-
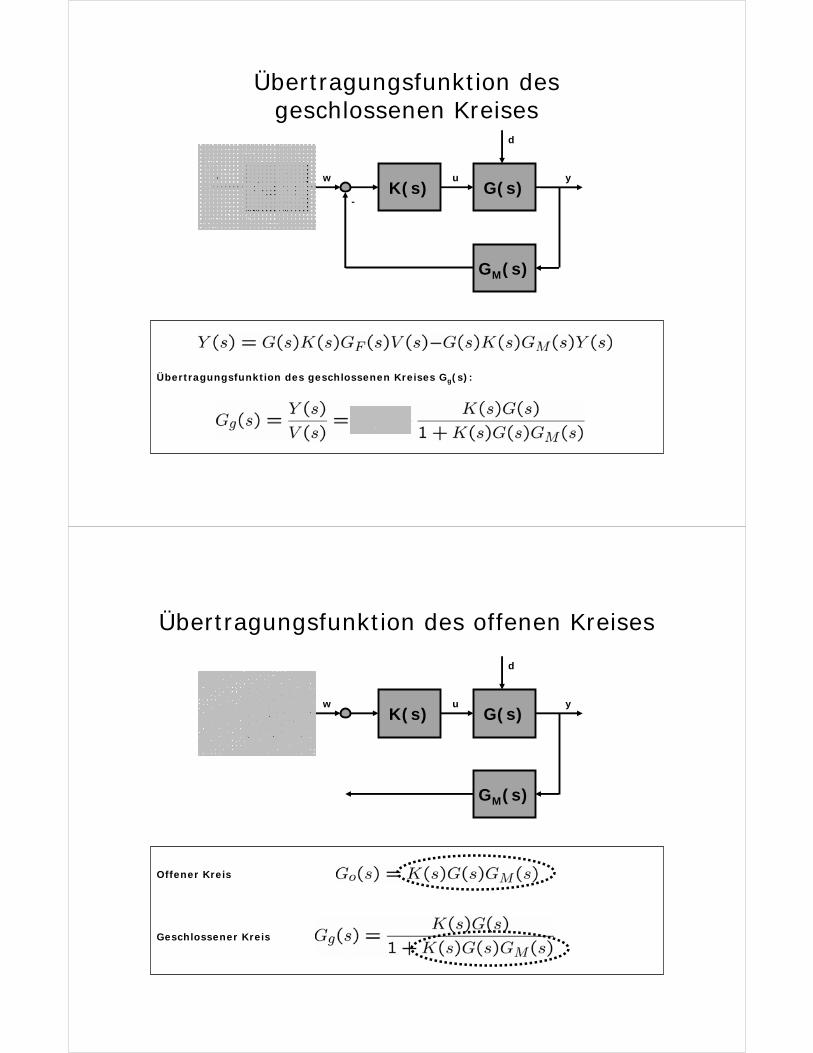
Übertragungsfunktion des geschlossenen Kreises
w u yGF(s) K(s) G(s)
GM(s)
d
v
-
Übertragungsfunktion des geschlossenen Kreises Gg(s):
Übertragungsfunktion des offenen Kreises
w u yGF(s) K(s) G(s)
GM(s)
d
v
Geschlossener Kreis
Offener Kreis
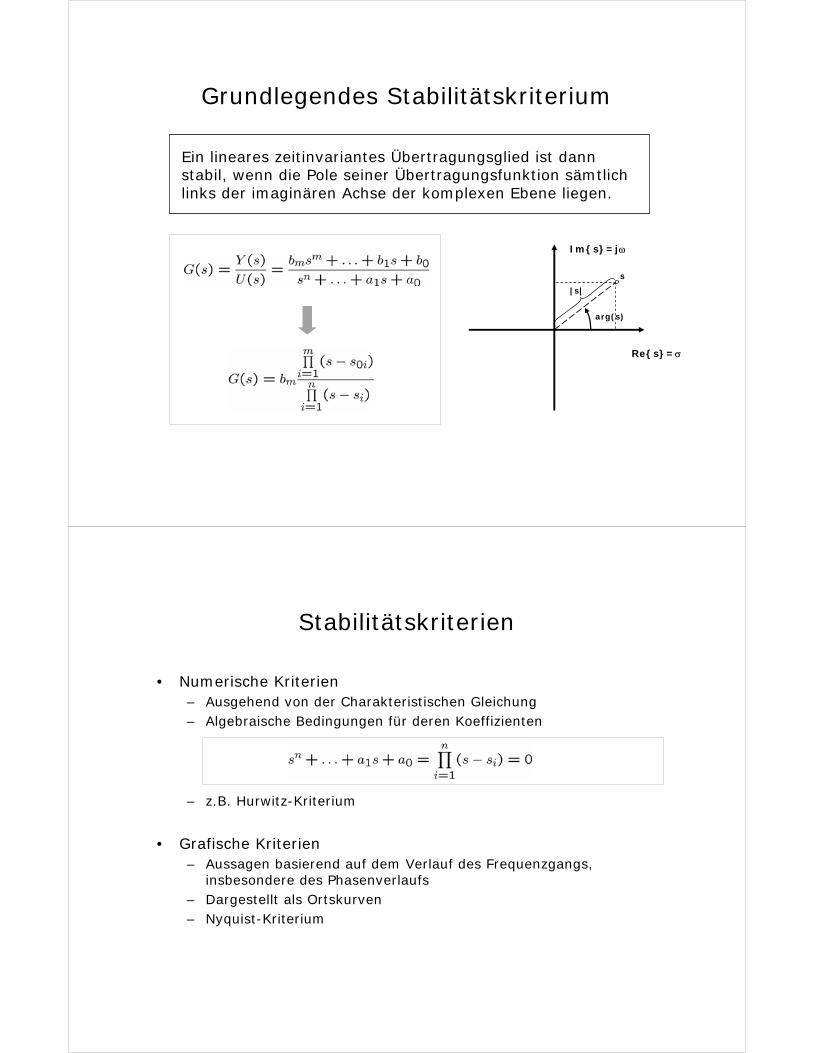
Grundlegendes Stabilitätskriterium
Ein lineares zeitinvariantes Übertragungsglied ist dann stabil, wenn die Pole seiner Übertragungsfunktion sämtlich links der imaginären Achse der komplexen Ebene liegen.
Re{s}=σ
Im{s}=jω
arg(s)
|s|
s
• Numerische Kriterien– Ausgehend von der Charakteristischen Gleichung– Algebraische Bedingungen für deren Koeffizienten
– z.B. Hurwitz-Kriterium
• Grafische Kriterien– Aussagen basierend auf dem Verlauf des Frequenzgangs,
insbesondere des Phasenverlaufs– Dargestellt als Ortskurven– Nyquist-Kriterium
Stabilitätskriterien
Die Wurzelortskurve - Bedeutung und Analyse der Pollage des geschlossenen Kreises
• Bereits viele Hinweise auf die zentrale Bedeutung der Pole einer
Übertragungsfunktion für das Verhalten des zugehörigen dynamischen
Systems
– Die Pole legen fest, ob das System schwingt, wie schnell es schwingt
(Frequenz) und wie lange es schwingt oder abklingt (Dämpfung)
• Beurteilung der Regelung anhand der Übertragungsfunktion des
geschlossenen Kreises
– Vgl. Nyquist-Kriterium, das aber nur eine Aussage über die Stabilität
macht!
Bedeutung der Polstellenlage
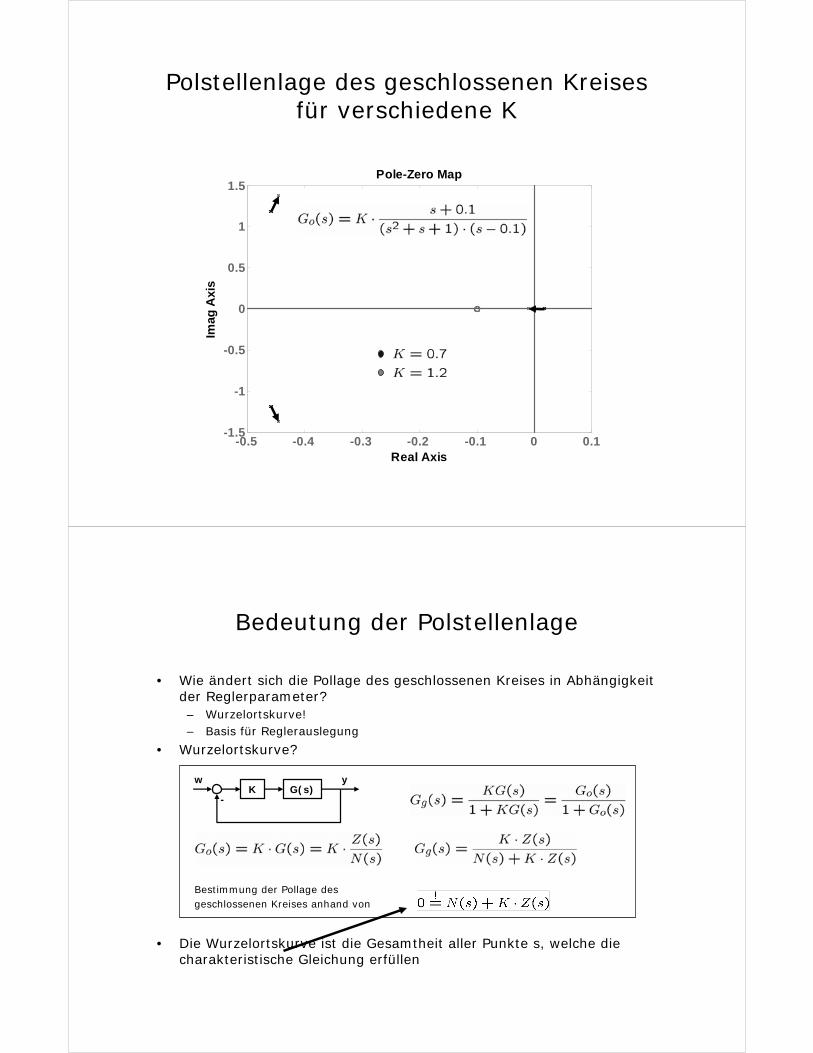
Polstellenlage des geschlossenen Kreises für verschiedene K
Pole-Zero Map
Real Axis
Imag
Axi
s
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1-1.5
-1
-0.5
0
0.5
1
1.5
Bedeutung der Polstellenlage
• Wie ändert sich die Pollage des geschlossenen Kreises in Abhängigkeit der Reglerparameter?– Wurzelortskurve!– Basis für Reglerauslegung
• Wurzelortskurve?
• Die Wurzelortskurve ist die Gesamtheit aller Punkte s, welche die charakteristische Gleichung erfüllen
K G(s)w y
-
Bestimmung der Pollage des geschlossenen Kreises anhand von
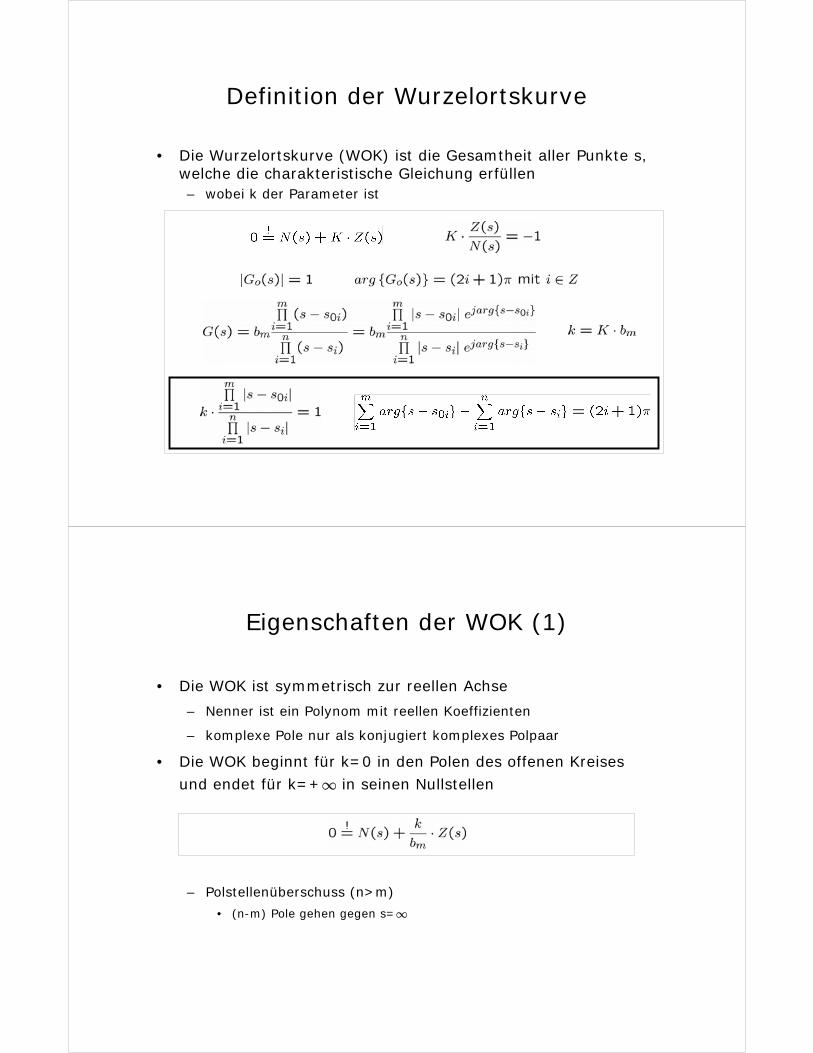
Definition der Wurzelortskurve
• Die Wurzelortskurve (WOK) ist die Gesamtheit aller Punkte s, welche die charakteristische Gleichung erfüllen– wobei k der Parameter ist
Eigenschaften der WOK (1)
• Die WOK ist symmetrisch zur reellen Achse
– Nenner ist ein Polynom mit reellen Koeffizienten
– komplexe Pole nur als konjugiert komplexes Polpaar
• Die WOK beginnt für k=0 in den Polen des offenen Kreises und endet für k=+∞ in seinen Nullstellen
– Polstellenüberschuss (n>m)
• (n-m) Pole gehen gegen s=∞
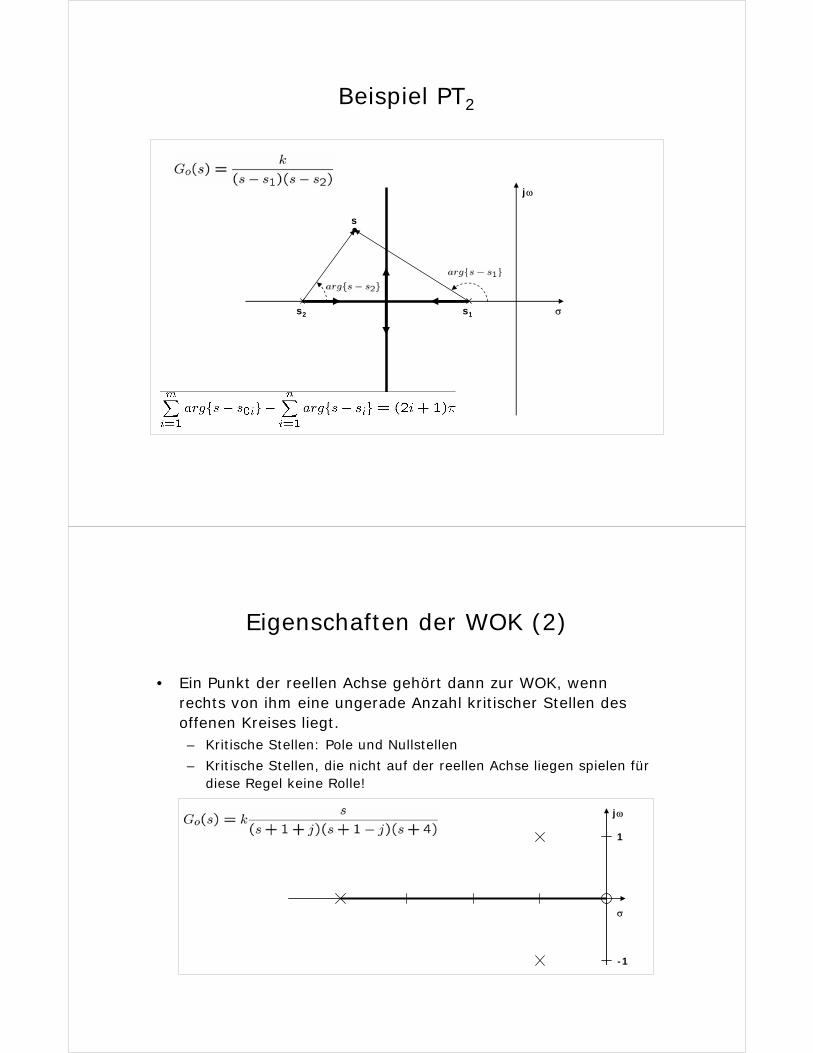
Beispiel PT2
s1s2
s
σ
jω
Eigenschaften der WOK (2)
• Ein Punkt der reellen Achse gehört dann zur WOK, wenn rechts von ihm eine ungerade Anzahl kritischer Stellen des offenen Kreises liegt.– Kritische Stellen: Pole und Nullstellen
– Kritische Stellen, die nicht auf der reellen Achse liegen spielen für diese Regel keine Rolle!
σ
jω
-1
1
Eigenschaften der WOK (2)
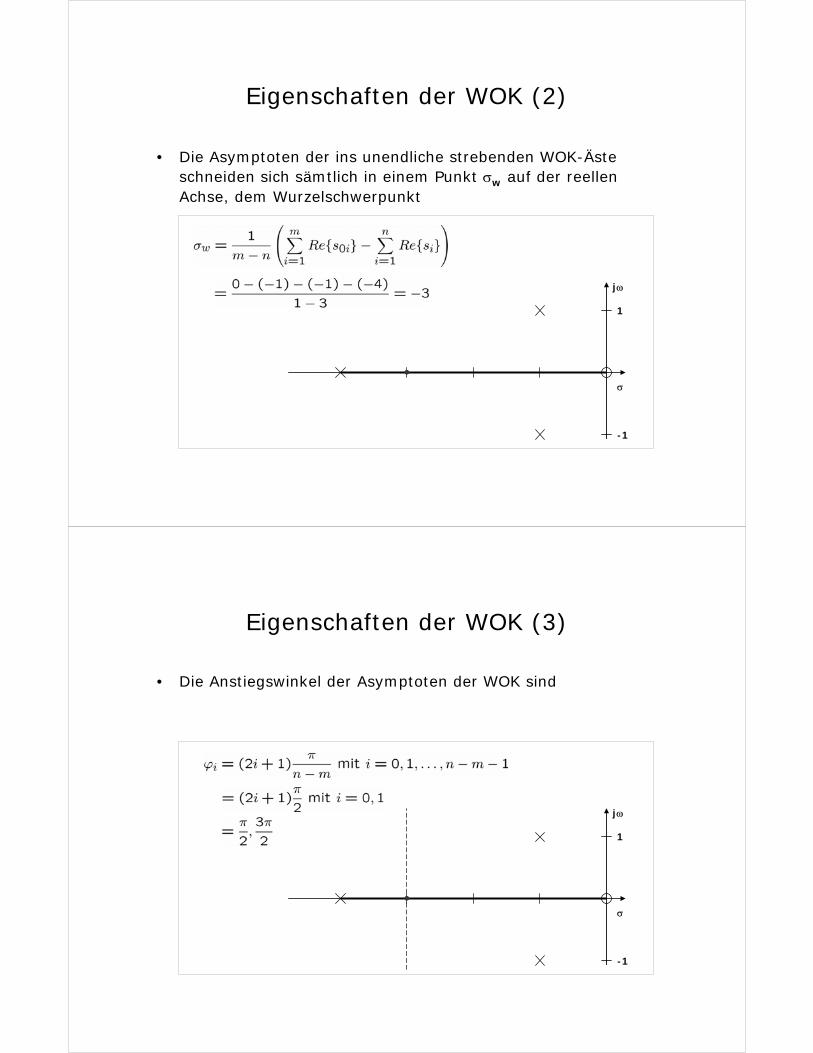
• Die Asymptoten der ins unendliche strebenden WOK-Ästeschneiden sich sämtlich in einem Punkt σw auf der reellen Achse, dem Wurzelschwerpunkt
σ
jω
-1
1
Eigenschaften der WOK (3)
• Die Anstiegswinkel der Asymptoten der WOK sind
σ
jω
-1
1
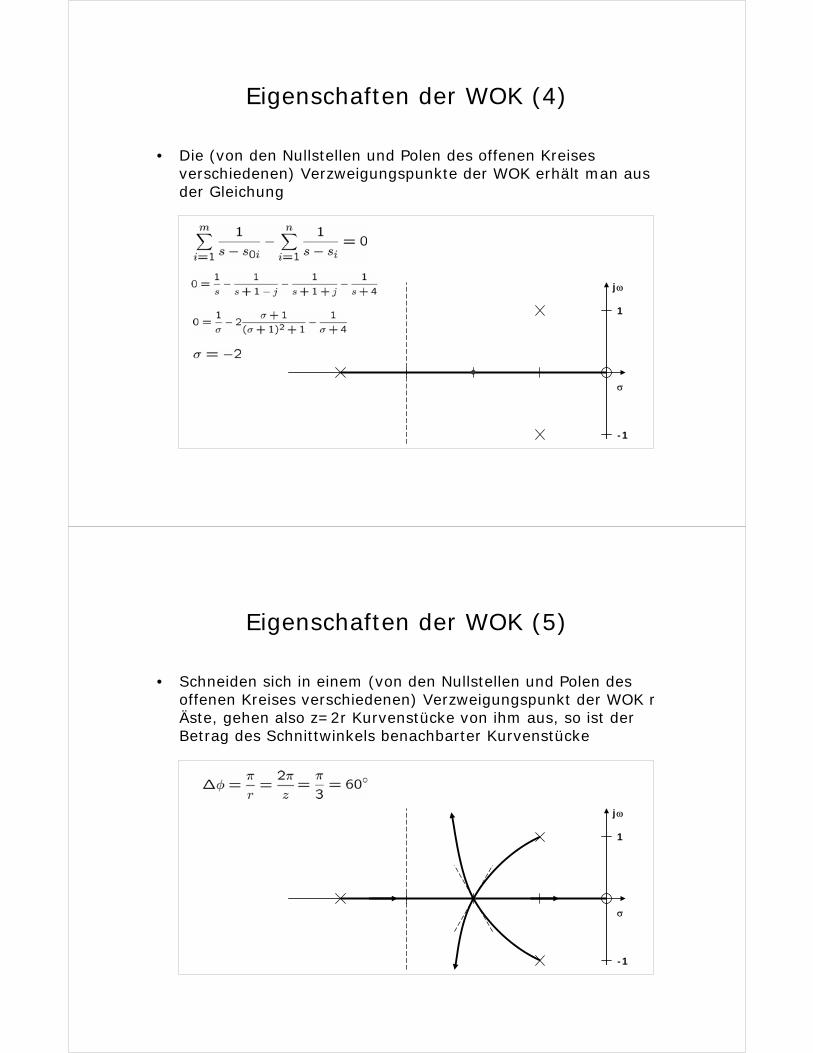
Eigenschaften der WOK (4)
• Die (von den Nullstellen und Polen des offenen Kreises verschiedenen) Verzweigungspunkte der WOK erhält man aus der Gleichung
σ
jω
-1
1
Eigenschaften der WOK (5)
• Schneiden sich in einem (von den Nullstellen und Polen des offenen Kreises verschiedenen) Verzweigungspunkt der WOK r Äste, gehen also z=2r Kurvenstücke von ihm aus, so ist der Betrag des Schnittwinkels benachbarter Kurvenstücke
σ
jω
-1
1
Wurzelortskurve, die Moral
• Die Wurzelortskurve beschreibt die Wanderung der Pole des
geschlossenen Kreises bei Variation der Reglerverstärkung k
– Veränderung der Dynamik
• Sie kann damit als Basis für den Reglerentwurf dienen
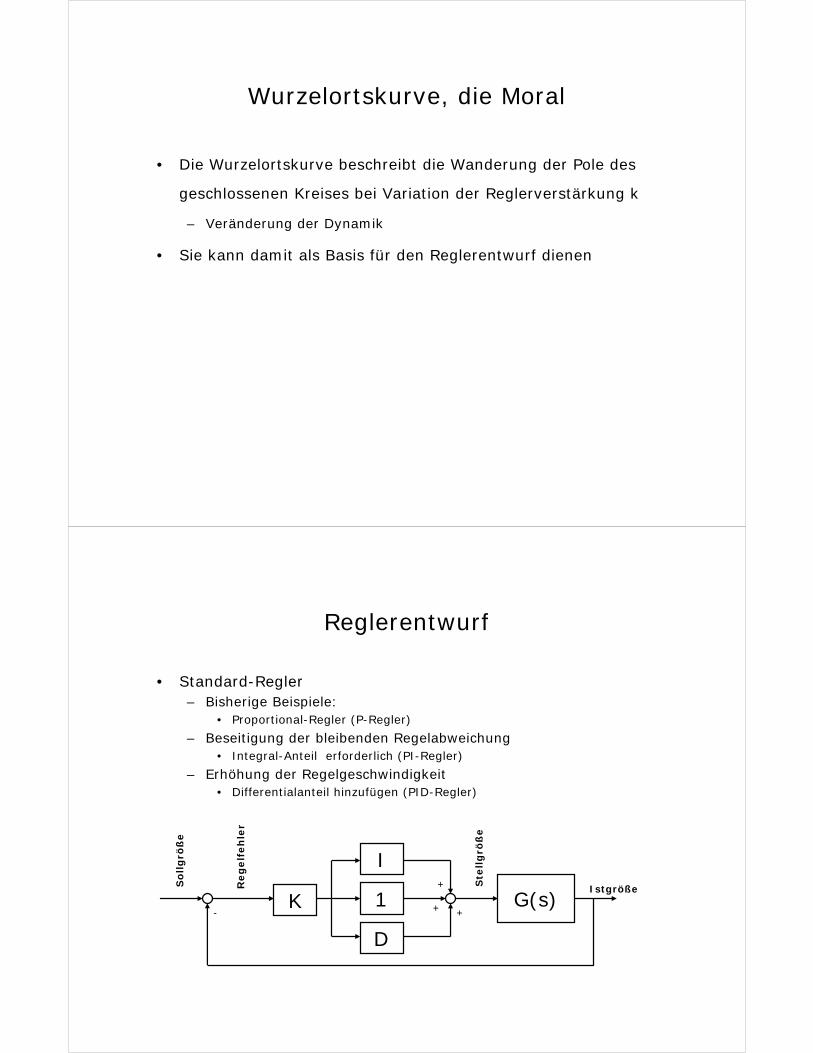
Reglerentwurf
• Standard-Regler– Bisherige Beispiele:
• Proportional-Regler (P-Regler)
– Beseitigung der bleibenden Regelabweichung• Integral-Anteil erforderlich (PI-Regler)
– Erhöhung der Regelgeschwindigkeit• Differentialanteil hinzufügen (PID-Regler)
-1
I+
+
D+
G(s)
So
llg
röß
e
IstgrößeSte
llg
röß
e
K
Reg
elf
eh
ler
-1
I+
+
D+
G(s)
So
llg
röß
e
IstgrößeSte
llg
röß
e
K
Reg
elf
eh
ler
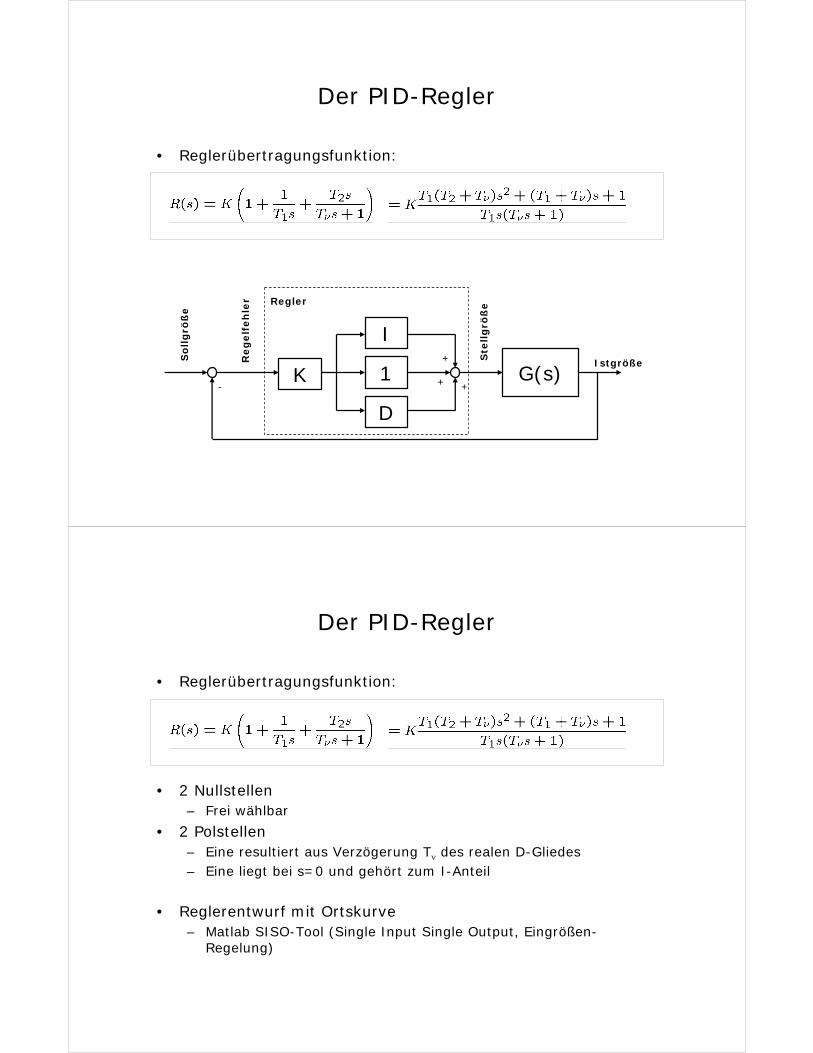
Der PID-Regler
• Reglerübertragungsfunktion:
Regler
Der PID-Regler
• Reglerübertragungsfunktion:
• 2 Nullstellen– Frei wählbar
• 2 Polstellen– Eine resultiert aus Verzögerung Tν des realen D-Gliedes– Eine liegt bei s=0 und gehört zum I-Anteil
• Reglerentwurf mit Ortskurve– Matlab SISO-Tool (Single Input Single Output, Eingrößen-
Regelung)