grupuri de simetrii - math.uaic.rooanacon/depozit/grupuri de simetrii.pdf · ind data o varietate...
TRANSCRIPT
Grupuri de simetrii
Oana Constantinescu
Oana Constantinescu Grupuri de simetrii
Rolul grupurilor de transformari in de�nirea unei geometrii
Felix Klein (1849-1925) a dorit sa aplice conceptul de grup
pentru a caracteriza diferitele geometrii ale timpului.
In discursul inaugural de la Universitatea Erlangen (1872) -
�Tendinte recente in cercetarea geometrica� - Klein spune:
�ind data o varietate si in ea un grup de transformari, sarcina
noastra este sa investigam acele proprietati ale unei �guri din
varietate care nu se schimba prin transformarile grupului.
Se da o multime M si SM grupul permutarilor lui M. Orice
subgrup G al lui SM este un grup de transformari ale lui M.
Se studiaza acele proprietati ale �gurilor care sunt invariate de
toate elementele lui G . Deci, apriori, M nu are proprietati
geometrice, acestea sunt dictate de grupul G . O geometrie
este notata prin (M,G ).
Oana Constantinescu Grupuri de simetrii
Rolul grupurilor de transformari in de�nirea unei geometrii
Felix Klein (1849-1925) a dorit sa aplice conceptul de grup
pentru a caracteriza diferitele geometrii ale timpului.
In discursul inaugural de la Universitatea Erlangen (1872) -
�Tendinte recente in cercetarea geometrica� - Klein spune:
�ind data o varietate si in ea un grup de transformari, sarcina
noastra este sa investigam acele proprietati ale unei �guri din
varietate care nu se schimba prin transformarile grupului.
Se da o multime M si SM grupul permutarilor lui M. Orice
subgrup G al lui SM este un grup de transformari ale lui M.
Se studiaza acele proprietati ale �gurilor care sunt invariate de
toate elementele lui G . Deci, apriori, M nu are proprietati
geometrice, acestea sunt dictate de grupul G . O geometrie
este notata prin (M,G ).
Oana Constantinescu Grupuri de simetrii
Geometria euclidiana (plana)
Geometria euclidiana se ocupa de acele proprietati pastrate de
izometrii: lungimea segmentelor si congruenta lor, masura
unghiurilor si congruenta acestora, coliniaritatea, raportul
simplu al punctelor.
Fie P un plan euclidian, inzestrat cu o functie distanta
d : P × P → R :
d(A,B) ≥ 0, ∀A,B ∈ P; d(A,B) = 0 ⇔ A = B;
d(A,B) = d(B,A);d(A,B) ≤ d(A,C ) + d(C ,A), ∀A,B,C ∈ P; d(A,B) =d(A,C ) + d(C ,A) ⇔ A− C − B.
De�nition
Se numeste izometrie a planului P o aplicatie f : P → P cu
proprietatea
d (f (A), f (B)) = d(A,B), ∀A,B ∈ P.
Se poate demonstra ca orice izometrie a planului este o
aplicatie bijectiva.
Geometria euclidiana (plana)
Geometria euclidiana se ocupa de acele proprietati pastrate de
izometrii: lungimea segmentelor si congruenta lor, masura
unghiurilor si congruenta acestora, coliniaritatea, raportul
simplu al punctelor.
Fie P un plan euclidian, inzestrat cu o functie distanta
d : P × P → R :
d(A,B) ≥ 0, ∀A,B ∈ P; d(A,B) = 0 ⇔ A = B;
d(A,B) = d(B,A);d(A,B) ≤ d(A,C ) + d(C ,A), ∀A,B,C ∈ P; d(A,B) =d(A,C ) + d(C ,A) ⇔ A− C − B.
De�nition
Se numeste izometrie a planului P o aplicatie f : P → P cu
proprietatea
d (f (A), f (B)) = d(A,B), ∀A,B ∈ P.
Se poate demonstra ca orice izometrie a planului este o
aplicatie bijectiva.
Grupul izometriilor
Theorem
Multimea izometriilor planului formeaza un grup in raport cu
compunerea functiilor.
Grupul izometriilor cu un punct �x este izomorf cu grupul ortogonal
O(2).
O(2) ={A ∈M2(R) | AAt = AtA = I2
}={A ∈ Gl(2,R) | A−1 = At
}Clasi�care
Izometrii de specia I: translatia, rotatia
Izometrii de specia a II-a: simetria ortogonala axiala, compunerea
dintre o simetrie axiala si o translatie de vector paralel cu axa
simetriei
Oana Constantinescu Grupuri de simetrii
Grupul izometriilor
Theorem
Multimea izometriilor planului formeaza un grup in raport cu
compunerea functiilor.
Grupul izometriilor cu un punct �x este izomorf cu grupul ortogonal
O(2).
O(2) ={A ∈M2(R) | AAt = AtA = I2
}={A ∈ Gl(2,R) | A−1 = At
}Clasi�care
Izometrii de specia I: translatia, rotatia
Izometrii de specia a II-a: simetria ortogonala axiala, compunerea
dintre o simetrie axiala si o translatie de vector paralel cu axa
simetriei
Oana Constantinescu Grupuri de simetrii
Grupul izometriilor
Theorem
Multimea izometriilor planului formeaza un grup in raport cu
compunerea functiilor.
Grupul izometriilor cu un punct �x este izomorf cu grupul ortogonal
O(2).
O(2) ={A ∈M2(R) | AAt = AtA = I2
}={A ∈ Gl(2,R) | A−1 = At
}Clasi�care
Izometrii de specia I: translatia, rotatia
Izometrii de specia a II-a: simetria ortogonala axiala, compunerea
dintre o simetrie axiala si o translatie de vector paralel cu axa
simetriei
Oana Constantinescu Grupuri de simetrii
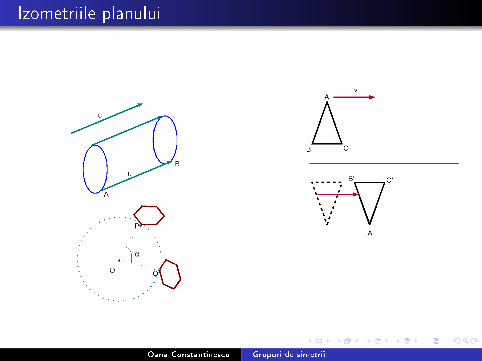
Izometriile planului
Oana Constantinescu Grupuri de simetrii
Simetriile unei �guri
Odata �xata o geometrie cu un grup de automor�sme G , se
poate studia subgrupul automor�smelor care invariaza o �gura
�xata F . Aceste automor�sme se numesc simetrii ale �gurii
respective.
De�nition
Fie F ⊂ P o �gura �xata a planului P. Se numeste simetrie a lui
F o izometrie a planului, f : P → P, care invariaza �gura F :f (F) = F .
Theorem
Multimea simetriilor �gurii F ⊂ P este un subgrup al grupului
izometriilor planului P.
Oana Constantinescu Grupuri de simetrii
Simetriile unei �guri
Odata �xata o geometrie cu un grup de automor�sme G , se
poate studia subgrupul automor�smelor care invariaza o �gura
�xata F . Aceste automor�sme se numesc simetrii ale �gurii
respective.
De�nition
Fie F ⊂ P o �gura �xata a planului P. Se numeste simetrie a lui
F o izometrie a planului, f : P → P, care invariaza �gura F :f (F) = F .
Theorem
Multimea simetriilor �gurii F ⊂ P este un subgrup al grupului
izometriilor planului P.
Oana Constantinescu Grupuri de simetrii
Grupuri de simetrii
Grupurile de simetrii ale unor poligoane:
grupul lui Klein: grupul simetriilor unui dreptunghi diferit de
patrat
grupurile diedrale: grupul simetriilor unui poligon regulat
subgrupurile acestora formate din rotatii
Reciproc: dat un grup de simetrii, sa determinam un poligon
care sa aiba drept grup de simetrii pe cel initial
Determinarea tuturor grupurilor �nite de simetrii: teorema lui
Leonardo
Oana Constantinescu Grupuri de simetrii
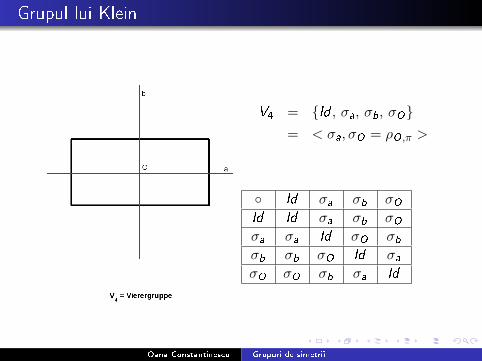
Grupul lui Klein
V4 = {Id , σa, σb, σO}= < σa, σO = ρO,π >
◦ Id σa σb σOId Id σa σb σOσa σa Id σO σbσb σb σO Id σaσO σO σb σa Id
Oana Constantinescu Grupuri de simetrii
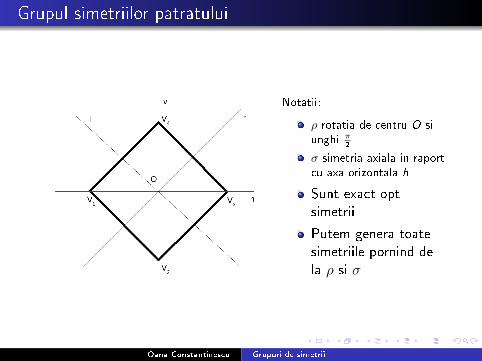
Grupul simetriilor patratului
Notatii:
ρ rotatia de centru O si
unghi π2
σ simetria axiala in raport
cu axa orizontala h
Sunt exact opt
simetrii
Putem genera toate
simetriile pornind de
la ρ si σ
Oana Constantinescu Grupuri de simetrii

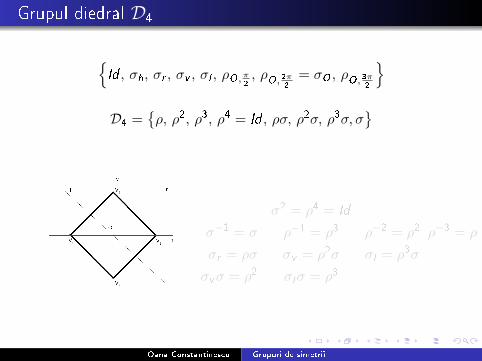
Grupul diedral D4
{Id , σh, σr , σv , σl , ρO,π
2, ρ
O, 2π2
= σO , ρO, 3π2
}D4 =
{ρ, ρ2, ρ3, ρ4 = Id , ρσ, ρ2σ, ρ3σ, σ
}
σ2 = ρ4 = Id
σ−1 = σ ρ−1 = ρ3 ρ−2 = ρ2 ρ−3 = ρ
σr = ρσ σv = ρ2σ σl = ρ3σ
σvσ = ρ2 σlσ = ρ3
Oana Constantinescu Grupuri de simetrii
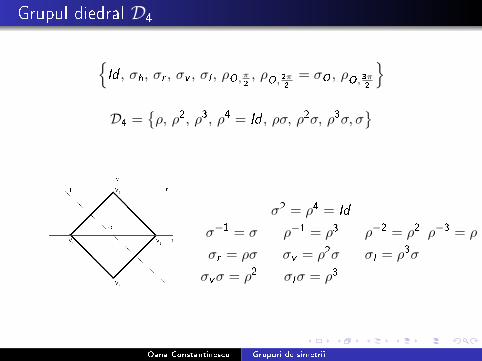
Grupul diedral D4
{Id , σh, σr , σv , σl , ρO,π
2, ρ
O, 2π2
= σO , ρO, 3π2
}D4 =
{ρ, ρ2, ρ3, ρ4 = Id , ρσ, ρ2σ, ρ3σ, σ
}
σ2 = ρ4 = Id
σ−1 = σ ρ−1 = ρ3 ρ−2 = ρ2 ρ−3 = ρ
σr = ρσ σv = ρ2σ σl = ρ3σ
σvσ = ρ2 σlσ = ρ3
Oana Constantinescu Grupuri de simetrii
Grupul diedral D4
{Id , σh, σr , σv , σl , ρO,π
2, ρ
O, 2π2
= σO , ρO, 3π2
}D4 =
{ρ, ρ2, ρ3, ρ4 = Id , ρσ, ρ2σ, ρ3σ, σ
}
σ2 = ρ4 = Id
σ−1 = σ ρ−1 = ρ3 ρ−2 = ρ2 ρ−3 = ρ
σr = ρσ σv = ρ2σ σl = ρ3σ
σvσ = ρ2 σlσ = ρ3
Oana Constantinescu Grupuri de simetrii

Grupul diedral D4
Compunerea dintre o simetrie axiala fata de dreapta d si o
rotatie cu centrul apartinand dreptei d este o simetrie fata de
o dreapta ce trece prin centrul rotatiei.
Deci σρ, σρ2, σρ3 sunt simetrii fata de drepte ce trec prin O,
deci sunt aplicatii involutive.
σρ = (σρ)−1 = ρ−1σ−1 = ρ3σ,
σρ2 = (σρ2)−1 = ρ−2σ−1 = ρ2σ,
σρ3 = (σρ3)−1 = ρ−3σ−1 = ρσ.
Oana Constantinescu Grupuri de simetrii
Grupul diedral D4
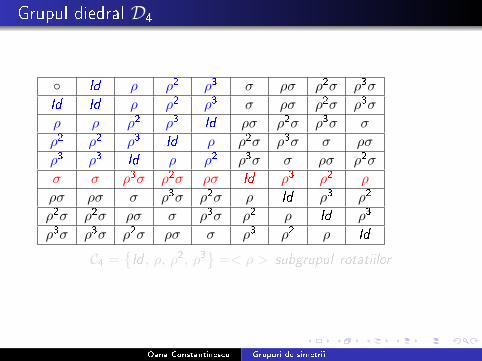
◦ Id ρ ρ2 ρ3 σ ρσ ρ2σ ρ3σ
Id Id ρ ρ2 ρ3 σ ρσ ρ2σ ρ3σ
ρ ρ ρ2 ρ3 Id ρσ ρ2σ ρ3σ σ
ρ2 ρ2 ρ3 Id ρ ρ2σ ρ3σ σ ρσ
ρ3 ρ3 Id ρ ρ2 ρ3σ σ ρσ ρ2σ
σ σ ρ3σ ρ2σ ρσ Id ρ3 ρ2 ρ
ρσ ρσ σ ρ3σ ρ2σ ρ Id ρ3 ρ2
ρ2σ ρ2σ ρσ σ ρ3σ ρ2 ρ Id ρ3
ρ3σ ρ3σ ρ2σ ρσ σ ρ3 ρ2 ρ Id
C4 ={Id , ρ, ρ2, ρ3
}=< ρ > subgrupul rotatiilor
Oana Constantinescu Grupuri de simetrii
Grupul diedral D4
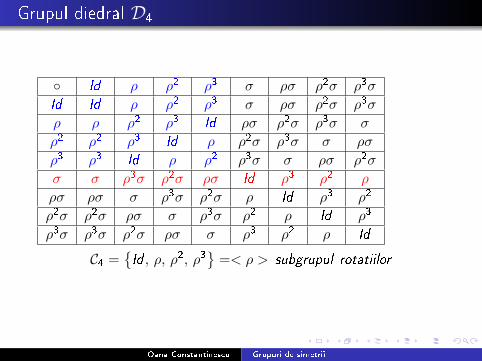
◦ Id ρ ρ2 ρ3 σ ρσ ρ2σ ρ3σ
Id Id ρ ρ2 ρ3 σ ρσ ρ2σ ρ3σ
ρ ρ ρ2 ρ3 Id ρσ ρ2σ ρ3σ σ
ρ2 ρ2 ρ3 Id ρ ρ2σ ρ3σ σ ρσ
ρ3 ρ3 Id ρ ρ2 ρ3σ σ ρσ ρ2σ
σ σ ρ3σ ρ2σ ρσ Id ρ3 ρ2 ρ
ρσ ρσ σ ρ3σ ρ2σ ρ Id ρ3 ρ2
ρ2σ ρ2σ ρσ σ ρ3σ ρ2 ρ Id ρ3
ρ3σ ρ3σ ρ2σ ρσ σ ρ3 ρ2 ρ Id
C4 ={Id , ρ, ρ2, ρ3
}=< ρ > subgrupul rotatiilor
Oana Constantinescu Grupuri de simetrii
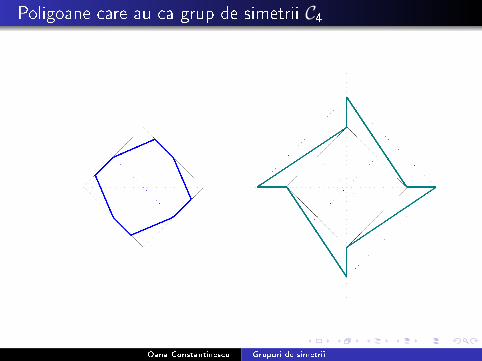
Poligoane care au ca grup de simetrii C4
Oana Constantinescu Grupuri de simetrii
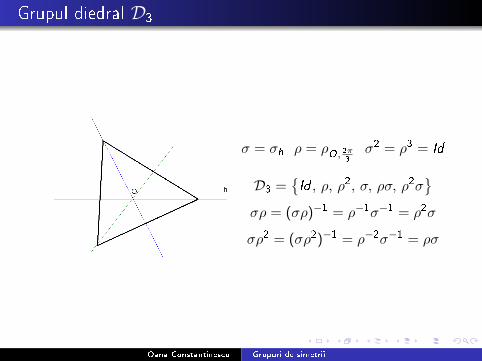
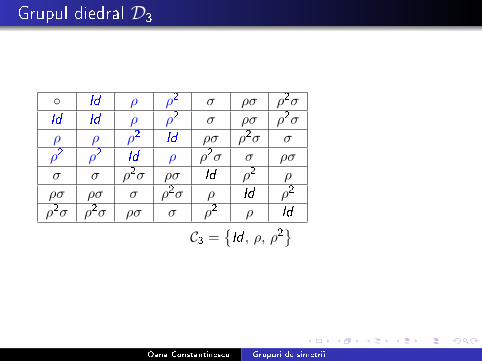
Grupul diedral D3
σ = σh ρ = ρO, 2π
3σ2 = ρ3 = Id
D3 ={Id , ρ, ρ2, σ, ρσ, ρ2σ
}σρ = (σρ)−1 = ρ−1σ−1 = ρ2σ
σρ2 = (σρ2)−1 = ρ−2σ−1 = ρσ
Oana Constantinescu Grupuri de simetrii
Grupul diedral D3
◦ Id ρ ρ2 σ ρσ ρ2σ
Id Id ρ ρ2 σ ρσ ρ2σ
ρ ρ ρ2 Id ρσ ρ2σ σ
ρ2 ρ2 Id ρ ρ2σ σ ρσ
σ σ ρ2σ ρσ Id ρ2 ρ
ρσ ρσ σ ρ2σ ρ Id ρ2
ρ2σ ρ2σ ρσ σ ρ2 ρ Id
C3 ={Id , ρ, ρ2
}
Oana Constantinescu Grupuri de simetrii
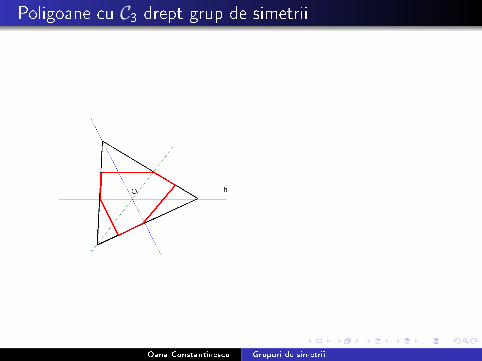
Poligoane cu C3 drept grup de simetrii
Oana Constantinescu Grupuri de simetrii
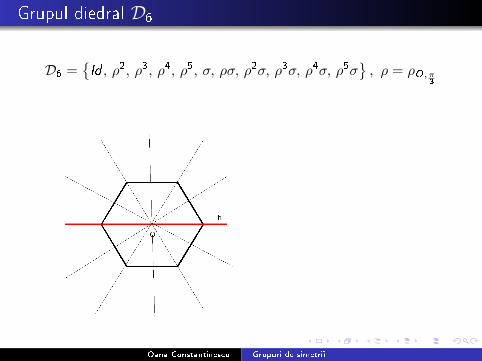
Grupul diedral D6
D6 ={Id , ρ2, ρ3, ρ4, ρ5, σ, ρσ, ρ2σ, ρ3σ, ρ4σ, ρ5σ
}, ρ = ρO,π
3
Oana Constantinescu Grupuri de simetrii
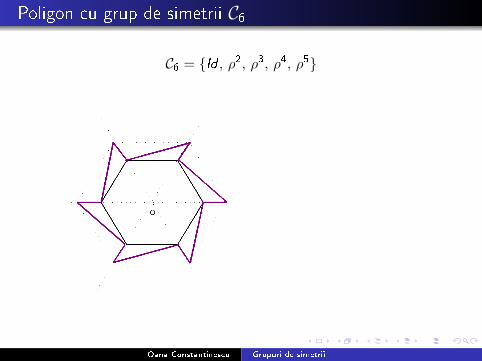
Poligon cu grup de simetrii C6
C6 = {Id , ρ2, ρ3, ρ4, ρ5}
Oana Constantinescu Grupuri de simetrii
Grupul diedral Dn si subgrupul rotatiilor Cn
Avand un poligon regulat cu n laturi, �ecare varf Vi poate �
dus printr-o simetrie intr-unul din cele n varfuri ale poligonului,
de exemplu Vk . Atunci un varf vecin lui Vi poate � dus prin
acea simetrie intr-unul din varfurile vecine ale lui Vk . Deci in
total avem 2n posibilitati. Cum imaginea poligonului regulat
printr-o simetrie este determinata atunci cand se cunosc
imaginile a doua varfuri vecine prin acea simetrie, rezulta ca
exista cel mult 2n simetrii pentru poligonul respectiv.
Fie h una din axele de simetrie ale poligonului regulat. Notam
cu σ simetria axiala in raport cu h si cu ρ rotatia de centru O
(centrul de simetrie al poligonului, situat la intersectia axelor
sale de simetrie) si unghi orientat 2πn.{
Id , ρ, ρ2, · · · , ρn−1, ρσ, ρ2σ, · · · , ρn−1σ}sunt 2n simetrii ale
poligonului, deci acestea sunt toate simetriile posibile. In
consecinta Dn =< ρ, σ > si subgrupul rotatiilor sale este
grupul ciclic Cn =< ρ > de ordin n.
Oana Constantinescu Grupuri de simetrii
Grupul diedral Dn si subgrupul rotatiilor Cn
Avand un poligon regulat cu n laturi, �ecare varf Vi poate �
dus printr-o simetrie intr-unul din cele n varfuri ale poligonului,
de exemplu Vk . Atunci un varf vecin lui Vi poate � dus prin
acea simetrie intr-unul din varfurile vecine ale lui Vk . Deci in
total avem 2n posibilitati. Cum imaginea poligonului regulat
printr-o simetrie este determinata atunci cand se cunosc
imaginile a doua varfuri vecine prin acea simetrie, rezulta ca
exista cel mult 2n simetrii pentru poligonul respectiv.
Fie h una din axele de simetrie ale poligonului regulat. Notam
cu σ simetria axiala in raport cu h si cu ρ rotatia de centru O
(centrul de simetrie al poligonului, situat la intersectia axelor
sale de simetrie) si unghi orientat 2πn.{
Id , ρ, ρ2, · · · , ρn−1, ρσ, ρ2σ, · · · , ρn−1σ}sunt 2n simetrii ale
poligonului, deci acestea sunt toate simetriile posibile. In
consecinta Dn =< ρ, σ > si subgrupul rotatiilor sale este
grupul ciclic Cn =< ρ > de ordin n.
Oana Constantinescu Grupuri de simetrii

Dn
Pentru a completa tabela grupului procedam astfel. Pentru
primele n linii folosim ρn = σ2 = Id si �ecare linie se obtine
practic din precedenta prin compunere la stanga cu ρ.
Pentru linia corespunzatoare lui σ folosim faptul ca orice
compunere dintre o simetrie axiala si o rotatie este o simetrie
axiala, deci o aplicatie involutiva. Astfel,
(σρk)−1 = σρk , ∀k ∈ 1, n − 1. Deci
σρk = ρn−kσ, ∀k ∈ 1, n − 1.
Dupa completarea acestei linii, ultimele n − 1 linii se obtin
�ecare din precedenta prin compunere la stanga cu ρ.
D1 =< σ > e grupul simetriilor unui triunghi isoscel
neechilateral, iar C1 = {Id}.D2 =< σ, ρO,π = σO >= V4, iar C2 = {Id , ρO,π} e grupul
simetriilor unui paralelogram diferit de romb.
Oana Constantinescu Grupuri de simetrii
Dn
Pentru a completa tabela grupului procedam astfel. Pentru
primele n linii folosim ρn = σ2 = Id si �ecare linie se obtine
practic din precedenta prin compunere la stanga cu ρ.
Pentru linia corespunzatoare lui σ folosim faptul ca orice
compunere dintre o simetrie axiala si o rotatie este o simetrie
axiala, deci o aplicatie involutiva. Astfel,
(σρk)−1 = σρk , ∀k ∈ 1, n − 1. Deci
σρk = ρn−kσ, ∀k ∈ 1, n − 1.
Dupa completarea acestei linii, ultimele n − 1 linii se obtin
�ecare din precedenta prin compunere la stanga cu ρ.
D1 =< σ > e grupul simetriilor unui triunghi isoscel
neechilateral, iar C1 = {Id}.D2 =< σ, ρO,π = σO >= V4, iar C2 = {Id , ρO,π} e grupul
simetriilor unui paralelogram diferit de romb.
Oana Constantinescu Grupuri de simetrii

Dn
Pentru a completa tabela grupului procedam astfel. Pentru
primele n linii folosim ρn = σ2 = Id si �ecare linie se obtine
practic din precedenta prin compunere la stanga cu ρ.
Pentru linia corespunzatoare lui σ folosim faptul ca orice
compunere dintre o simetrie axiala si o rotatie este o simetrie
axiala, deci o aplicatie involutiva. Astfel,
(σρk)−1 = σρk , ∀k ∈ 1, n − 1. Deci
σρk = ρn−kσ, ∀k ∈ 1, n − 1.
Dupa completarea acestei linii, ultimele n − 1 linii se obtin
�ecare din precedenta prin compunere la stanga cu ρ.
D1 =< σ > e grupul simetriilor unui triunghi isoscel
neechilateral, iar C1 = {Id}.D2 =< σ, ρO,π = σO >= V4, iar C2 = {Id , ρO,π} e grupul
simetriilor unui paralelogram diferit de romb.
Oana Constantinescu Grupuri de simetrii
Dn
Pentru a completa tabela grupului procedam astfel. Pentru
primele n linii folosim ρn = σ2 = Id si �ecare linie se obtine
practic din precedenta prin compunere la stanga cu ρ.
Pentru linia corespunzatoare lui σ folosim faptul ca orice
compunere dintre o simetrie axiala si o rotatie este o simetrie
axiala, deci o aplicatie involutiva. Astfel,
(σρk)−1 = σρk , ∀k ∈ 1, n − 1. Deci
σρk = ρn−kσ, ∀k ∈ 1, n − 1.
Dupa completarea acestei linii, ultimele n − 1 linii se obtin
�ecare din precedenta prin compunere la stanga cu ρ.
D1 =< σ > e grupul simetriilor unui triunghi isoscel
neechilateral, iar C1 = {Id}.D2 =< σ, ρO,π = σO >= V4, iar C2 = {Id , ρO,π} e grupul
simetriilor unui paralelogram diferit de romb.
Oana Constantinescu Grupuri de simetrii
Teorema lui Leonardo
Pana in acest moment am reusit sa demonstram urmatorul rezultat:
Theorem
Pentru orice n ∈ N∗, exista cate un poligon care are ca grup de
simetrii pe Dn si respectiv pe Cn.
Ne intereseaza rezultatul reciproc: orice grup �nit de simetrii al
unei �guri plane este de tipul Dn sau Cn?Hermann Weyl (1885-1955) a�rma in cartea �Symmetry�, Princeton
University Press, 1951, ca Leonardo da Vinci (1452-1519) era
preocupat de aceasta problema. Mai exact acesta determina in mod
sistematic simetriile unei cladiri centrale si studia cum sa ataseze
capele, nise, etc, fara a strica simetria nucleului.
Oana Constantinescu Grupuri de simetrii
Teorema lui Leonardo
Pana in acest moment am reusit sa demonstram urmatorul rezultat:
Theorem
Pentru orice n ∈ N∗, exista cate un poligon care are ca grup de
simetrii pe Dn si respectiv pe Cn.
Ne intereseaza rezultatul reciproc: orice grup �nit de simetrii al
unei �guri plane este de tipul Dn sau Cn?Hermann Weyl (1885-1955) a�rma in cartea �Symmetry�, Princeton
University Press, 1951, ca Leonardo da Vinci (1452-1519) era
preocupat de aceasta problema. Mai exact acesta determina in mod
sistematic simetriile unei cladiri centrale si studia cum sa ataseze
capele, nise, etc, fara a strica simetria nucleului.
Oana Constantinescu Grupuri de simetrii
Teorema lui Leonardo
Pana in acest moment am reusit sa demonstram urmatorul rezultat:
Theorem
Pentru orice n ∈ N∗, exista cate un poligon care are ca grup de
simetrii pe Dn si respectiv pe Cn.
Ne intereseaza rezultatul reciproc: orice grup �nit de simetrii al
unei �guri plane este de tipul Dn sau Cn?Hermann Weyl (1885-1955) a�rma in cartea �Symmetry�, Princeton
University Press, 1951, ca Leonardo da Vinci (1452-1519) era
preocupat de aceasta problema. Mai exact acesta determina in mod
sistematic simetriile unei cladiri centrale si studia cum sa ataseze
capele, nise, etc, fara a strica simetria nucleului.
Oana Constantinescu Grupuri de simetrii
Teorema lui Leonardo
Theorem
Singurele grupuri �nite de izometrii sunt Cn si Dn.
Corollary
(Leonardo) Dat un poligon oarecare, grupul sau de simetrii este Dn
sau Cn.
Oana Constantinescu Grupuri de simetrii
Teorema lui Leonardo
Theorem
Singurele grupuri �nite de izometrii sunt Cn si Dn.
Corollary
(Leonardo) Dat un poligon oarecare, grupul sau de simetrii este Dn
sau Cn.
Oana Constantinescu Grupuri de simetrii
Theorem
Singurele grupuri �nite de izometrii sunt Cn si Dn.
Demonstratie
Fie G un grup �nit de izometrii ale planului P. Rezulta ca acesta
nu poate contine translatii sau compuneri de translatii cu simetrii
axiale, deoarece acestea ar genera un subgrup in�nit. In consecinta
G contine doar rotatii si simetrii axiale.
Caz I Presupunem ca G contine doar rotatii:
G = C1 = {Id}∃ ρA,α ∈ G, ρA,α 6= Id . In aceasta situatie demonstram ca
toate rotatiile sunt de centru A.
Pp prin reducere la absurd ca ∃ ρB,β ∈ G cu A 6= B. Atunci
ρ−1B,βρ
−1A,αρB,βρA,α ∈ G. Dar aceasta compunere de rotatii
este o translatie diferita de Id caci suma unghiurilor
orientate ale acestor rotatii este 0. Se contrazice astfel
ipoteza ca G e grup �nit.
Deci ∀n ∈ N : ρnA,α = ρA,nα ∈ G si ρ−1
A,α = ρA,−α ∈ G. Astfel, toateelementele grupului pot � scrise sub forma ρA,α cu 0 ≤ α ≤ 2π.Fie α0 valoarea minima (pozitiva) pe care o poate lua unghiul unei
rotatii din G. Se demonstreaza prin reducere la absurd ca
∀ ρA,β ∈ G, ∃k ∈ N∗ astfel incat β = kα0. Deci orice rotatie a
grupului este de tipul ρA,kα0 = ρkA,α0
, pentru un anumit k natural,
deci este generata de ρA,α0 . In concluzie
G =< ρA,α0 >= Cm, ρmA,α0 = Id .
Caz II Presupunem ca G contine cel putin o simetrie axiala
σ.
Deoarece o izometrie si inversa ei sunt de aceeasi specie, iar
compunerea a doua izometrii de specia I este o izometrie de specia
I, rezulta ca multimea izometriilor de specia I ale lui G formeaza un
subgrup al acestuia, ce contine doar rotatii. Conform primului caz,
rezulta ca acest subgrup e de tipul Cn = {Id , ρ, · · · , ρn−1}. Ampresupus ca numarul izometriilor de specia I ale lui G este n.
Deci ∀n ∈ N : ρnA,α = ρA,nα ∈ G si ρ−1
A,α = ρA,−α ∈ G. Astfel, toateelementele grupului pot � scrise sub forma ρA,α cu 0 ≤ α ≤ 2π.Fie α0 valoarea minima (pozitiva) pe care o poate lua unghiul unei
rotatii din G. Se demonstreaza prin reducere la absurd ca
∀ ρA,β ∈ G, ∃k ∈ N∗ astfel incat β = kα0. Deci orice rotatie a
grupului este de tipul ρA,kα0 = ρkA,α0
, pentru un anumit k natural,
deci este generata de ρA,α0 . In concluzie
G =< ρA,α0 >= Cm, ρmA,α0 = Id .
Caz II Presupunem ca G contine cel putin o simetrie axiala
σ.
Deoarece o izometrie si inversa ei sunt de aceeasi specie, iar
compunerea a doua izometrii de specia I este o izometrie de specia
I, rezulta ca multimea izometriilor de specia I ale lui G formeaza un
subgrup al acestuia, ce contine doar rotatii. Conform primului caz,
rezulta ca acest subgrup e de tipul Cn = {Id , ρ, · · · , ρn−1}. Ampresupus ca numarul izometriilor de specia I ale lui G este n.
Presupunem ca G contine m ≥ 1 izometrii de specia a II-a.
Deoarece σ, ρσ, ρ2σ, · · · , ρn−1σ sunt izometrii de specia a II-a,
rezulta ca m ≥ n.
Dar cele m izometrii de specia a doua, compuse la dreapta cu σ,dau m izometrii de specia I, deci m ≤ n. In concluzie
m = n⇒ OrdG = 2n si
G ={Id , ρ, · · · , ρn−1, σ, ρσ, ρ2σ, · · · , ρn−1σ
}.
Pentru n = 1 avem G =< σ >= D1, iar pentru n > 1,
ρkσ, ∀k ∈ 1, n − 1 este o simetrie fata de o dreapta ce trece prin
centrul A al rotatiei ρ. Deci G = Dn.

Presupunem ca G contine m ≥ 1 izometrii de specia a II-a.
Deoarece σ, ρσ, ρ2σ, · · · , ρn−1σ sunt izometrii de specia a II-a,
rezulta ca m ≥ n.
Dar cele m izometrii de specia a doua, compuse la dreapta cu σ,dau m izometrii de specia I, deci m ≤ n. In concluzie
m = n⇒ OrdG = 2n si
G ={Id , ρ, · · · , ρn−1, σ, ρσ, ρ2σ, · · · , ρn−1σ
}.
Pentru n = 1 avem G =< σ >= D1, iar pentru n > 1,
ρkσ, ∀k ∈ 1, n − 1 este o simetrie fata de o dreapta ce trece prin
centrul A al rotatiei ρ. Deci G = Dn.
Bibliogra�e
1 Mircea Ganga, Manual Algebra clasa a XII-a, Mathpress,
Ploiesti, 2003
2 George E. Martin, Transformation Geometry, An Introduction
to Symmetry, Springer, 1982
3 Liviu Ornea, Adriana Turtoi, O introducere in geometrie,
Theta, Bucuresti 2011
4 Ioan Pop, Geometrie a�na, euclidiana si proiectiva, Editura
Universitatii �Al.I.Cuza�, Iasi, 1999
Oana Constantinescu Grupuri de simetrii