h -p ewlett ackard...0.95 – 1.17 v switch de encendido on motor: parado el pedal del acelerador:...
TRANSCRIPT

HEWLETT-PACKARD
[Year]
I N G E N I E R Í A M E C Á N I C A A U T O M O T R I Z
Jose Cabrera Prieto
Milton O. García
Jairo Llerena
Armando Pugo

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Sensores y Actuadores
1.1 APP SENSOR [Accelerator Pedal Position sensor]
El sensor de posición del pedal del acelerador está instalado en el extremo superior del
ensamblaje del pedal del acelerador. El sensor detecta la posición del pedal y envía una señal a
la ECM. La ECM utiliza la la señal para determinar la cantidad de combustible que se inyecta.
1.1.1 Terminales de la ECM y Valores de referencia
Terminal N°
Color Cable
ITEM Condición Voltaje
82 W Alimentación de Corriente sensor 1 Switch de encendido ON Aprox 5.3 V
83 R Posición del pedal sensor 1
Switch de encendido ON Motor: Parado
El pedal del acelerador: totalmente liberado
0.95 – 1.17 V
Switch de encendido ON Motor: Parado
El pedal del acelerador: totalmente pisado
Más de 4.6 V
83 B Tierra de la posision del pedal, sensor 1
Switch de encendido ON Aprox 0.3 V
85 - Tierra del sensor 1 Switch de encendido ON Aprox 0.3 V
90 W Alimentación de corriente sensor 2 Switch de encendido ON Aprox 5.3 V
91 R Posición del pedal sensor 2
Switch de encendido ON Motor: Parado
El pedal del acelerador: totalmente liberado
0.58 – 0.78 V
Switch de encendido ON Motor: Parado
El pedal del acelerador: totalmente pisado
Más de 2.3 V
92 B Tierra del sensor 2 Switch de encendido ON Aprox 0.3 V

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.1.2 Cableado del Circuito

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.2 Sensor CKP El sensor de posición del cigüeñal (CKP) se
encuentra en el bloque motor, los dientes de
los engranajes están mirando hacia atrás
(engranajes) de la placa de señales, en
el extremo del cigüeñal. Detecta la
fluctuación de las revoluciones del motor. El
sensor consta de un imán permanente y de
un IC Hall. Cuando el motor está en
marcha, las partes altas y bajas de los dientes
hacen que la distancia con el
sensor de cambie. Debido a los cambios del
campo magnético, la ECM recibe la señal de
tensión y detecta las fluctuaciones del motor en revolución.
1.2.1 Terminales de la ECM y Valores de referencia
Terminal N°
Color Cable
ITEM Condición Voltaje
44 W Alimentación de Corriente Switch de encendido ON Aprox 5.3 V
46 R Posición del sensor
Motor en Movimiento
Ralenti
Aprox 3.7 V
Motor en Movimiento
2000 rpm
Aprox 3.7 V
65 B Tierra del sensor Switch de encendido ON Aprox 0.3 V
67 - Tierra común Switch de encendido ON Aprox 0.3 V

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.2.2 Cableado del Circuito

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.3 Sensor CMP El sensor de la posición del árbol de levas (CMP) detecta la retracción con árbol de levas (lado izquierdo) para identificar a un cilindro en particular. El CMP detecta la posición del pistón. El sensor consta de un imán permanente y un IC Hall. Cuando el motor está en funcionamiento, las partes alta y baja de los dientes causa la brecha con el sensor de cambio.
1.3.1 Terminales de la ECM y Valores de referencia
Terminal N°
Color Cable
ITEM Condición Voltaje
45 W Alimentación de Corriente Switch de encendido ON Aprox 5.3 V
47 R Posición del sensor
Motor en Movimiento
Ralenti
Aprox 4.9 V
Motor en Movimiento
2000 rpm
Aprox 4.9 V
66 B Tierra del sensor Switch de encendido ON Aprox 0.3 V
67 - Tierra común Switch de encendido ON Aprox 0.3 V

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.3.2 Cableado del Circuito

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.4 Inyector de combustible El inyector de combustible es una pequeña y precisa
válvula solenoide. Cuando la ECM proporciona una tierra al circuito del
inyector de combustible, la bobina del inyector se activa. La bobina
de tensión jala la aguja de la válvula hacia atrás y permite que el
combustible fluya a través de los inyectores en el cilindro. La cantidad
de combustible inyectado depende de la duración de los pulsos de
inyección. La duración del pulso es el tiempo que el inyector de
combustible queda abierto. La ECM controla la duración del pulso de
inyección de combustible del motor sobre la base de las necesidades.
1.4.1 Terminales de la ECM y Valores de referencia
Terminal N°
Color Cable
ITEM Condición Voltaje
4 5
V G
Alimentación de Corriente (Cil 1 y 4) Alimentación de Corriente (Cil 2 y 3)
Motor en Movimiento
Ralenti
Aprox 7.5 V
Switch de encendido ON
2000 rpm
Aprox 8.0 V
21 22 23 24
G P W W
Inyector N° 2 Inyector N° 2 Inyector N° 3 Inyector N° 3
Motor en Movimiento
Ralenti
Aprox 7.5 V
Motor en Movimiento
2000 rpm
Aprox 8.0 V
4 5
w GR W B
Inyector N° 4 Inyector N° 4 Inyector N° 1 Inyector N° 1
Motor en Movimiento
Ralenti
Aprox 7.5 V

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Switch de encendido ON
2000 rpm
Aprox 8.0 V
1.4.2 Cableado del Circuito

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.5 ECM
La ECM se compone de un microprocesador y los
conectores para la señal de entrada y salida
y de alimentación. La ECM controla el motor.
1.5.1 Terminales de la ECM y Valores de referencia
Terminal N°
Color Cable
ITEM Condición Voltaje
105 113
BR BR
Relé de la ECM
Switch de encendido ON Switch de encendido OFF
Aprox 1.0 V
Switch de encendido OFF Batería
11 – 14 V
107 108
R R
Switch de encendido Switch de encendido ON Batería
11 – 14 V
119 120
R G
Alimentación de la ECM Switch de encendido ON Batería
11 – 14 V

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.5.2 Cableado del Circuito

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.6 Sensor ECT El sensor de temperatura del refrigerante del motor se
utiliza para detectar la temperatura del refrigerante
del motor. El sensor modifica una señal de tensión de
la ECM. La señal modificada vuelve a la ECM como la
temperatura de entrada del refrigerante del motor. El
sensor utiliza un termistor que es sensible al cambio
de temperatura. La resistencia eléctrica del termistor
disminuye a medida que aumenta la temperatura.
1.6.1 Datos de referencia
Temperatura del refrigerante °C (°F)
Voltaje Resistencia kΩ
-10 (14) 4.7 7.0 – 1.4
20 (68) 3.8 2.1 – 2.9
50 (122) 2.6 0.68 – 1
90 (194) 1.3 0-236 – 0.260

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.6.2 Cableado del Circuito

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.7 Sensor FRP [Fuel Rail Pressure] El sensor de la presión del rail común (FRP) se coloca en la línea de combustible. Mide
la presión del combustible en la línea de combustible. El sensor envía una señal de tensión a
la ECM. A medida que aumenta la presión, la tensión aumenta.
La ECM controla la presión del combustible en la línea de combustible por el dispositivo
de regulación de entrada. La ECM utiliza la señal de la línea de combustible del sensor de
presión como una señal de realimentación.
1.7.1 Terminales de la ECM y Valores de referencia
Terminal N°
Color Cable
ITEM Condición Voltaje
48 49
L B
Sensor de la presión del rail
Motor en Movimiento
Ralenti Aprox 1.0 V
Motor en Movimiento
2000 rpm Batería
11 – 14 V
63 R Alimentación del sensor Switch de encendido ON Batería
11 – 14 V
67 - Tierra del sensor Switch de encendido ON Batería
11 – 14 V
68 W Tierra común Switch de encendido ON

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.7.2 Cableado del Circuito

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
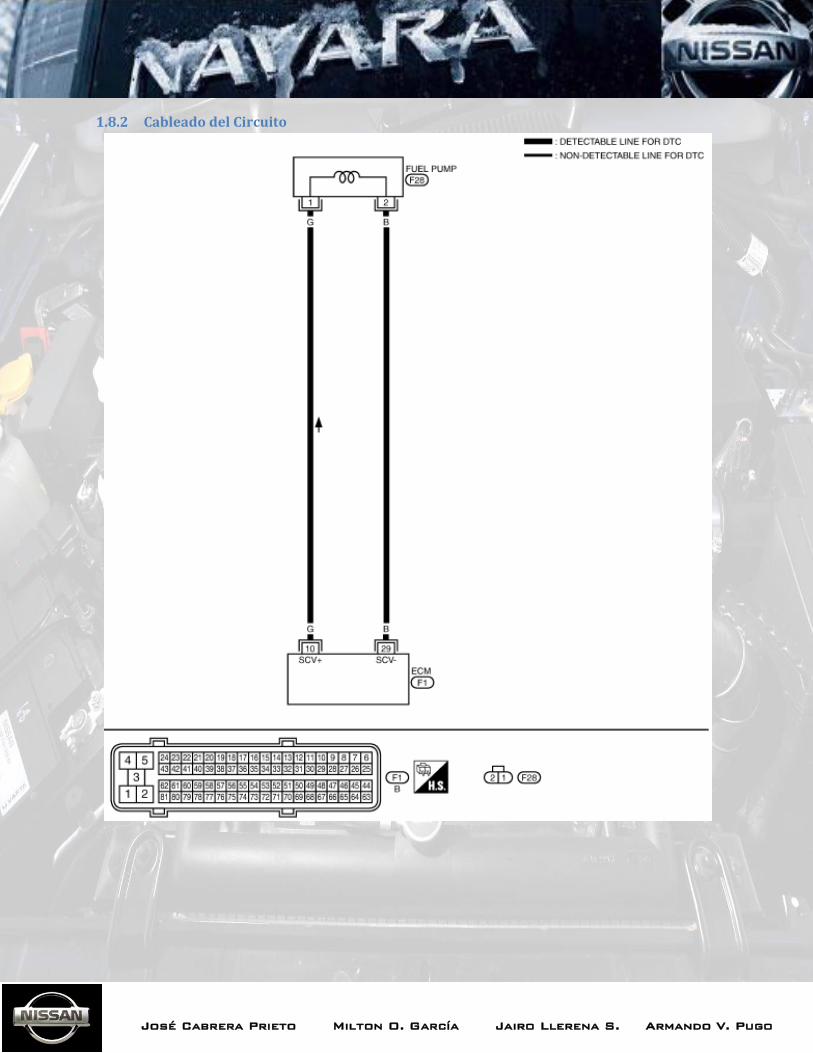
1.8 Bomba de combustible Para controlar la cantidad de aspiración de combustible
de la bomba, ésta, está provista de un émbolo. Cuando
la cantidad del combustible aspirado aumenta, la bomba
de combustible aumenta la presión de exhalación. Como
resultado de ello,
la presión de inyección de combustible se eleva. Cuando
la carga del motor aumenta, la ECM envía una señal a la
bomba de combustible para elevar la presión de
inyección.
1.8.1 Terminales de la ECM y Valores de referencia
Terminal N°
Color Cable
ITEM Condición Voltaje
10 G Bomba de Combustible
Motor en Movimiento
Ralenti
Aprox 5.8 V
Motor en Movimiento
2000 rpm
Aprox 5.5 V
29 B Bomba de Combustible
Motor en Movimiento
Ralenti
0.5 – 1 V
Motor en Movimiento
2000 rpm
0.5 – 1 V
José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.8.2 Cableado del Circuito

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.9 Sensor de temperatura de la bomba de combustible
El sensor de temperatura de la bomba de
combustible (1) se construye en la bomba
de combustible (2). El sensor detecta la
temperatura del combustible en la bomba y
se calibra el cambio en cantidad de
inyección de combustible, dependiendo de
la temperatura del combustible.
1.9.1 Terminales de la ECM y Valores de referencia
Terminal N°
Color Cable
ITEM Condición Voltaje
50 Y Sensor Motor en Movimiento
Ralenti Aprox
0.3 – 5.3 V
69 B Tierra del sensor Switch de encendido ON Aprox 0.3 V

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.9.2 Cableado del Circuito

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.10 Sensor IAT [Intake Air Temperature] El sensor de la temperatura de
entrada de aire, está integrado en el
sensor de flujo de masa de aire (1). El
sensor detecta la temperatura del
aire y transmite una señal a la ECM.
La unidad de detección de
temperatura utiliza un termistor que
es sensible al cambio de
temperatura. La resistencia eléctrica
del termistor disminuye en
respuesta al aumento de
temperatura.
1.10.1 Datos de referencia
Temperatura del aire de entrada °C (°F)
Voltaje Resistencia kΩ
25 (77) 2.4 1800 – 2200
80 (176) 0.8 0.283 – 0.359

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.10.2 Cableado del Circuito

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.11 Sensor MAF [Mass Air Flow] El sensor de flujo de la masa de aire (1) se
coloca en el ducto de entrada de aire de
admisión. Mide el caudal de aire de
admisión tomando solo de una parte de
todo el flujo del aire de admisión. El sensor
controla la temperatura, mediante un
alambre caliente. El calor del cable se
reduce dependiendo de como el flujo de aire
de admisión fluye alrededor del mismo.
Mientras más aire, mayor es la pérdida de
calor del cable. Por lo tanto, la corriente
eléctrica suministrada al hilo caliente se
cambia para mantener la temperatura del alambre caliente, a medida que aumenta el flujo de
aire. La ECM detecta el flujo de aire mediante este cambio de corriente.
1.11.1 Terminales de la ECM y Valores de referencia
Terminal N°
Color Cable
ITEM Condición Voltaje
54 G Sensor MAF
Switch de encendido ON Aprox 0.7 V
Motor en Movimiento
Ralenti 1.6 – 2.0 V
Motor en Movimiento
4000 rpm 1.6 – 2.0 V hasta
aprox 4.3 V
67 - Tierra del sensor (Protección) Motor en Movimiento Ralenti
Aprox. 0.3 V
73 B Tierra del sensor Switch de encendido ON Aprox. 0.3 V
105 113
BR BR
Relé de la ECM (Autoapagado)
Switch de encendido ON Switch de encendido OFF Por 10 segundos
Aprox. 1.0 V
Switch de encendido OFF Voltaje de la
batería 11 – 14 V
119 120
R G
Alimentación de la ECM Switch de encendido ON Voltaje de la
batería 11 – 14 V

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.11.2 Cableado del Circuito

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.12 TC System [Turbo Charger System]
El actuador del turbo, es controlado por los impulsos
generados por la carga de la válvula solenoide. Al
cambiar la abertura del álabe de geometría variable a
través de las barras, el volumen de admisión de aire se
ajusta.
La válvula solenoide del turbo cargador (1) se mueve por
impulsos ON/OFF de la ECM. Cuanto mayor sea el flanco
de subida, la presión del aire de carga aumenta.
Frente del Vehículo
Alternador (2)
1.12.1 Terminales de la ECM y Valores de referencia
Terminal N°
Color Cable
ITEM Condición Voltaje
6 BR Válvula del turbo cargador
Motor en Movimiento
Ralenti
Aprox. 6.3 V
Motor en Movimiento
2000 rpm
Aprox. 8.6 V
105 113
BR BR
Relé de la ECM (Autoapagado)
Switch de encendido ON Switch de encendido OFF Por 10 segundos
Aprox. 1.0 V
Switch de encendido OFF Voltaje de la
batería 11 – 14 V
119 120
R G
Alimentación de la ECM Switch de encendido ON Voltaje de la
batería 11 – 14 V

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.12.2 Cableado del Circuito

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.13 Sensor TC [Turbocharger boost sensor]
El sensor detecta la presión en el lado de salida del
refrigerador del aire de sobrealimentación. La tensión
de salida del sensor a la ECM aumenta a medida
que aumenta la presión.
1.13.1 Terminales de la ECM y Valores de referencia
Terminal N°
Color Cable
ITEM Condición Voltaje
52 BR Sensor del turbo cargador
Motor en Movimiento
Ralenti 2.1 – 2.4 V
Motor en Movimiento
2000 rpm 2.4 – 2.6 V
64 V Alimentación del Sensor Switch de encendido ON Aprox. 5.3 V
71 L Tierra del Sensor Switch de encendido ON Aprox. 0.3 V

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
1.13.2 Cableado del Circuito

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Diagrama del
sistema

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Diagrama del
sistema

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Can Communications
CAN (Controller Area Network) es una línea de comunicación en serie para aplicaciones en
tiempo real. Se trata de una línea múltiple en el vehículo de comunicación con comunicación de
alta velocidad y excelente capacidad de detección de errores. Muchas unidades de control
electrónico están equipadas en el vehículo, y cada unidad de control comparte información y
enlaces con otras unidades de control durante la operación (no independientes). En
comunicación CAN, las unidades de control están conectadas con 2 líneas de comunicación
(Línea CAN H, Línea CAN L), que permite un alto índice de transmisión de información con
menos cables. Cada unidad de control transmite/recibe datos, pero de manera selectiva sólo
lee los datos requeridos.
Componentes y ubicación del conector

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Esquema CAN

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Cableado del Sistema CAN

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Esquema del sistema
de alimentación

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Harness [Cableado o conjunto de cables]
Distribución de sockets del vehículo

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Main Harness Conectores

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Main Harness Conectores

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Engine Room Harness
Conjunto de cables del motor

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Engine Room Harness
Conjunto de cables del motor

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Engine Control Harness
Conjunto de cables de la EMC

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Engine Control Harness
Conjunto de cables de la ECM

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Electric Unit Location [Localización de las Unidades Eléctricas]
Habitáculo del Motor

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Habitáculo del Pasajeros

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Disposición de terminales de la ECM
Vistas Auxiliares

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Pines de Conexión de la ECM

José Cabrera Prieto Milton O. García Jairo Llerena S. Armando V. Pugo
Bibliografía
Electronic Service Manual - NISSAN NAVARA – D40