haptic report
DESCRIPTION
presentation in human computer interactionTRANSCRIPT

HAPTIC TECHNOLOGY (TOUCH THE VIRTUAL)
Presented by:
PAULINE M. TORION

WHAT IS HAPTICS ?
‘Haptics’ is derived from the Greek word ‘haptikos’which means – ‘being able to come into contact’.
Haptics is the science of applying touch (tactile) sensation and control to interact with computer applications.
Haptics , is the technology of adding the sensation of touch and feeling to computers.
When virtual objects are touched, they seem real and tangible.
Haptic senses links to the the brain's sensing position and movement of the body by means of sensory nerves within the muscles and joints.
Touch is at the core of personal experience.
Of the five senses, touch is the most proficient, the only one capable of simultaneous input and output

Generally computers typically only take advantage of one or two sensory channels (sight and sound) to transmit information to people.
Haptics promises to open this bottleneck by adding a new channel of communication using the sense of touch.
Haptics expands the notion of bidirectional communication between humans and computers to include sensory feedback.
Haptics = Touch = Connection

HISTORY OF HAPTICS
Scientists used term haptics to label the subfield of their studies that addressed human touch-based perception and manipulation
By 70’s and 80’s research efforts in a completely different field, robotics also began to focus on manipulation and perception by touch building a dexterous robotic hand
In the early 1990s a new usage of the word haptics began to emerge
The confluence of several emerging technologies made virtualized haptics, or computer haptics possible

GENERATION OF HAPTIC TECHNOLOGY
First generation: electromagnetic technologies produce a limited range of sensations
Second generation : touch-coordinate specific responses
Third generation : delivers both touch-coordinate specific responses and customizable haptic effects
Fourth generation : pressure sensitivity, i.e. how hard you press on a flat surface can affect the response

HAPTIC INFORMATION
Combination Of :
Tactile Information
REFERS TO THE INFORMATION
ACQUIRED BY THE SENSORS CONNECTED TO THE BODY
Kinesthetic Information
REFERS TO THE INFORMATION ACQUIRED BY THE SENSORS IN THE JOINTS

VIRTUAL REALITY
Virtual reality is a form of human-computer interaction providing a virtual environment that one can explore through direct interaction with our senses.
THE REAL WORLD
User should be able to touch the virtual object and feel a response from it.
In order to complete the imitation of the real world one should be able to interact with the environment and get a feedback.
This feedback is called Haptic Feedback.
HAPTICS FEEDBACK
Haptics is implemented through different type of interactions with a haptic device communicating with the computer. These interactions can be categorized into the different types of touch sensations a user can receive:
1)Tactile Feedback 2)Force Feedback

TACTILE FEEDBACK
Refers to the sensations felt by the skin.
It allows the user to feel things such as the texture of surfaces, temperature and vibration.
FORCE FEEDBACK
It reproduces the directional forces that can result from solid boundaries.
E.g. the weight of virtual objects, inertia, etc.

HAPTICS TECHNOLOGY
Haptic technology is a tactile feedback technology which takes advantage of the sense of touch by applying forces, vibrations, or motions to the user.
A haptic device gives people a sense of touch with computer-generated environments, so that when virtual objects are touched, they seem real and tangible.

HOW IT WORKS
4
3
24 3
2
1
1
End effector
Hand
Actuators
Muscles
Sensors
Tactile
&kinesthetic
Info:
Motor Commands
Motion
Contact
Forces
Virtual object
Position information
MachineHuman
Motion
Forces
Torque
Commands
Computer hapticsSensors

Basically a haptic system consist of two parts namely the human part and the machine part.
In the figure shown above, the human part (left) senses and controls the position of the hand, while the machine part (right) exerts forces from the hand to simulate contact with a virtual object.
Also both the systems will be provided with necessary sensors, processors and actuators.

In the case of the human system, nerve receptors performs sensing, brain performs processing and muscles performs actuation of the motion performed by the hand.
While in the case of the machine system, the above mentioned functions are performed by the encoders, computer and motors respectively.

HAPTIC DEVICES
It allows users to touch, feel and manipulate 3-D objects in virtual environments.
HOW ARE HAPTIC DEVICES DIFFERENT?
Common interface devices like mouse and joystick are only input devices. No feedback.
Haptic devices are input-output devices.

COMMONLY USED HAPTIC DEVICES
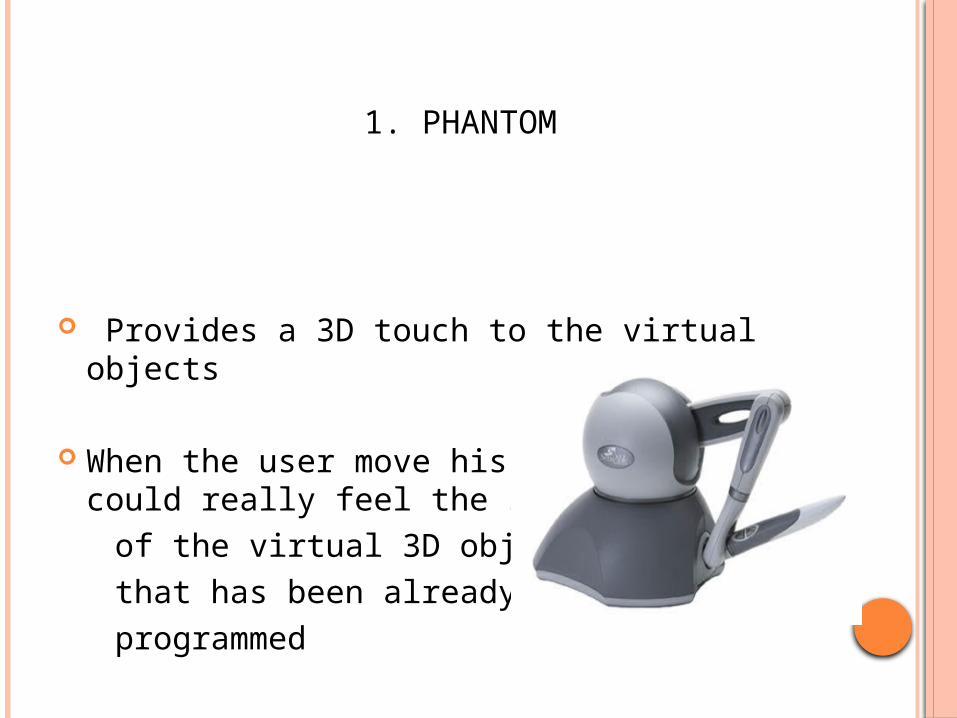
1. PHANTOM
Provides a 3D touch to the virtual objects
When the user move his finger, then he could really feel the shape and size
of the virtual 3D object that has been already programmed


2. CYBER GRASP
The CyberGrasp system fits over the user's entire hand like an exoskeleton and adds resistive force feedback to each finger
Adapted to different size of the fingers
Located on the back of the hand

3.MAGNETIC LEVITATION HAPTIC INTERFACES
A technology for feeling
sensation over total body

HAPTIC RENDERING PRINCIPLE OF HAPTIC INTERFACE
Interaction occurs at an interaction tool that mechanically couples two controlled dynamical systems :
a) haptic interface with a computer b) human user with a central nervous system
CHARACTERISTICS Low back-drive inertia and friction
Balanced range,resolution and bandwidth of position sensing and force reflection,minimal constraints on motion
Symmetric inertia,friction,stiffness and resonant frequency properties,proper ergonomics

APPLICATIONS OF HAPTICS

• sense of touch is crucial for medical training
• various haptic interfaces for medical simulation may prove especially useful for training
MILITARY APPLICATIONS
For certain applications, for example where terrain or texture information needs to be conveyed, haptics may be the most efficient communication channel.
MEDICAL APPLICATIONS

feel maps that are displayed on the internet and also learn mathematics by tracing touchable mathematical course
most haptic systems still rely heavily on a combined visual/haptic interface
MUSEUM DISPLAY
o for 3D digitization of priceless artifacts and objects from their sculpture and decorative arts collections, making the images available via CD-ROM
CONTD…
ASSISTIVE TECHNOLOGY FOR THE BLIND AND VISUALLY IMPAIRED

ENTERTAINMENT o Haptics is used to enhance gaming experience
o software also allows you to program force feedback sensations to your game controller button press
o "Submarines" is a PHANTOM variant of the well known battleship game
HOLOGRAPHIC INTERACTION The feedback allows the user to interact with a hologram and receive tactile
response as if the holographic object were real
Ultrasound waves to create a phenomenon called acoustic radiation pressure which provides tactile feedback as users interact with the holographic object.

APPLICATIONS OF HAPTICS TECHNOLOGY
Computer and video games-Haptic feedback is commonly used in arcade games, especially racing video games. Disney Research, Pittsburg (DRP) has shown off a revolutionary technology called ‘Surround Haptics’ that can bring real life experience in video gaming and film watching.

Personal computers- Apple's MacBook and MacBook Pro started incorporating a "Tactile Touchpad" design. Mobile devices- Tactile haptic feedback is becoming common in cellular devices. Nokia and prada implemented it using piezoelectric sensor pads.

Robotics-Haptic technology is also widely used in teleoperation, or telerobotics.
Arts and design- Haptics is used in virtual arts, such as sound synthesis or graphic design and animation

USES OF HAPTIC TECHNOLOGIES
Haptic technology is used: Teleoperators and simulators Computer and video games Mobile consumer technologies Medicine Robotics

TELEOPERATORS AND SIMULATORS Teleoperators are remote controlled robotic tools. When robotic
tool comes in contact with the object of interest, then “force feedbacks” are sent back. This haptic technology is generally used when a scientist wants to
investigate a dangerous substa- nce e.g. Radioactive material. A robotic tool is sent instead and a scientist will get feedback through force. Simulations are commonly used to give a feel of the real event
to a person. Haptic simulators are currently used in
medical simulators and flight simulators for pilot training (2004).

COMPUTERS AND VIDEO GAMES
Arcade games, on computers, use haptic technology to enhance the users experience. ”In 1976, Sega's motorbike game Moto-Cross, also known as Fonz, was the first game to use haptic feedback, which caused the handlebars to vibrate during a collision
with another vehicle.”
Video games, such as car racing games, using peripherals such as joysticks and steering wheels, create motion, give you a virtual simulation of driving a car. This is done through the use of haptic technology.

MOBILE CONSUMER TECHNOLOGIES
Haptic feed back (response) is becoming common in mobile phones.
It enables users to feel clicks, vibrations and other tactile input. Samsung, dubbed the Anycall Haptic, features a large touch-screen display just
like the iPhone but provides the user with 22 kinds of touch sensations.

MEDICINE
Haptic technology plays a major role in medicine Haptic teleoperators are used by surgeons to carry out operations with the least trauma and better outcomes for the patient. Haptic interfaces allow surgeons and doctors t carry out
operations to patients in a shorter time and with less fatigue. This allows surgeons to increase the number of surgeries carried out every day.

ROBOTICS In a telerobotic system, a human operator
controls the movements of a robot that is located some distance away.
Some teleoperated robots are limited to very simple tasks, such as aiming a camera
and sending back visual images. In a more sophisticated form of teleportation known as tele- presence, the human operator has a sense of
being located in the robot's environment. Haptics now makes it possible to include touch cues in addition to audio and visual cues in telepresence models.

FUTURE VISION
1.Holographic Interaction The feedback allows the user to interact with a
hologram and actually receive tactile response using acoustic radiation pressure
2.Medical Application Use of a central workstation from which surgeons
would perform operations in various locations; with machine setup and patient preparation performed by local nursing staff
3. Textile Industry User could study and feel the texture and quality of
materail during the sale of cloth through internet

FUTURE APPLICATION
The Design Research Lab in Berlin, Germany has developed a haptic feedback glove designed specifically for blind users to improve texting capabilities.
The Lorm glove allows blind users to text by tapping various sensors, and to receive text via vibrations.
Text for blind
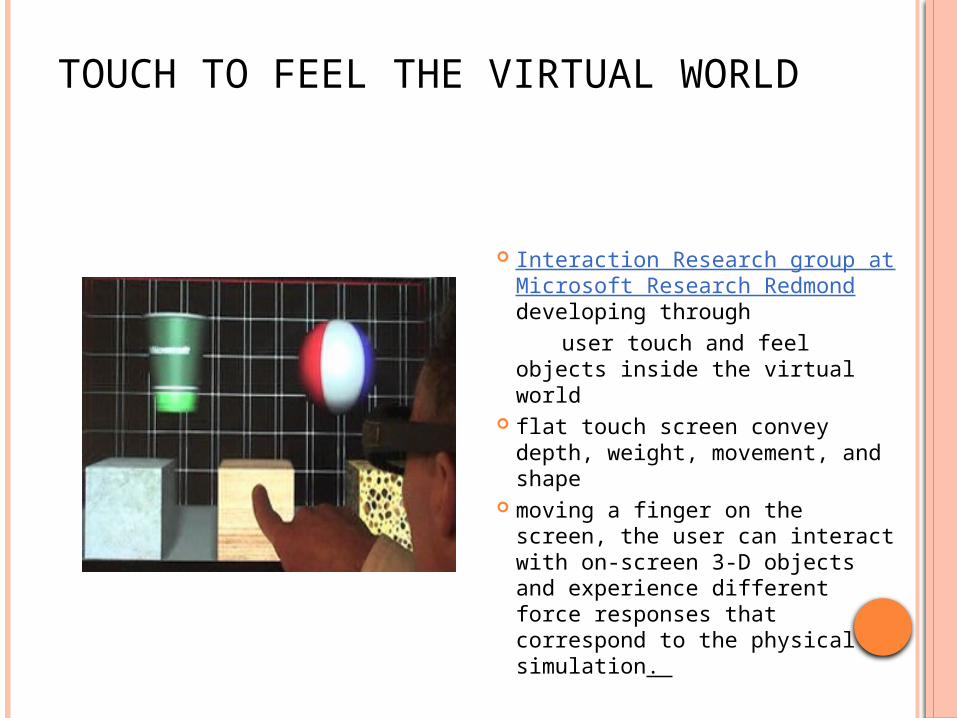
TOUCH TO FEEL THE VIRTUAL WORLD
Interaction Research group at Microsoft Research Redmond developing through
user touch and feel objects inside the virtual world
flat touch screen convey depth, weight, movement, and shape
moving a finger on the screen, the user can interact with on-screen 3-D objects and experience different force responses that correspond to the physical simulation.

ADVANTAGES
Working time is reduced.
Communication is centered through touch and the digital world can behave like the real world.
Increase confidence in medical field.
With haptic hardware and software designer can feel the result as if he/she were handling physical objects.

DISADVANTAGES
High cost involved
Large weight and size of haptic devices (especially wearable ones)
Haptic interfaces can only exert forces with limited magnitude and not equally well in all directions
haptic-rendering algorithms operate in discrete time whereas users operate in continuous time
LIMITATIONS
High cost involved
Large weight and size of haptic devices (especially wearable ones)
Haptic interfaces can only exert forces with limited magnitude and not equally well in all directions
haptic-rendering algorithms operate in discrete time whereas users operate in continuous time

CONCLUSION
Touch plays a huge role in the way we perceive our surroundings and also how we interact with them. Haptics technologies have come a long way in bringing this technology into reality.
Currently limited to consumers. Future generations of mobile devices and
game console accessories will implement more haptic feedback.
Increasing applications of haptics the cost of the haptic devices will drop in future.
This technology brings us one step closer to virtual world.

THANK YOU
