hsc mathematics ext. 2 (4 unit) - sample lecture slides€¦ · overview 1. graphs & curve...
TRANSCRIPT

HSC Mathematics Ext. 2 (4 Unit)
SAMPLE LECTURE SLIDES
HSC Exam Preparation Programs22-26 September, 2014
c© 2014 Sci SchoolTM. All rights reserved.
Overview
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
1. Graphs & Curve Sketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex Locus Problems
6. Integration
7. Volumes
8. Mechanics
9. Harder 4 Unit Practice
© 2014 Sci School

6. Integration
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
© 2014 Sci School

6.1 Integration by Substitution
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
This technique is derived from the Fundamental Theorem of Calculus, whichstates that, for continuous functions f(x) = F ′(x) and u(x),∫ b
a
(F (u))′dx = F (u(b))− F (u(a))
=
∫ u(b)
u(a)
f(u) du.
The Chain Rule tell us that
(F (u))′= f(u)u′.
Hence, we arrive at the rule for Integration by Substitution:
∫ b
a
f(u)u′ dx =
∫ u(b)
u(a)
f(u) du
© 2014 Sci School
6.1 Integration by Substitution
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
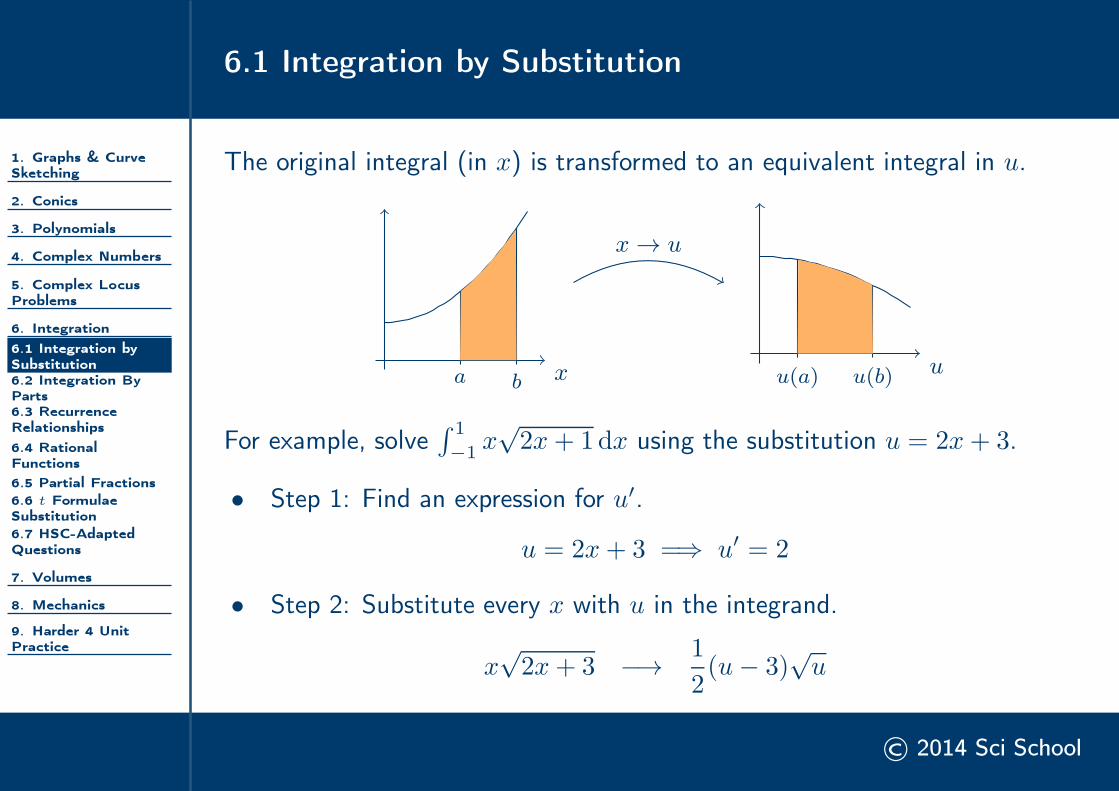
The original integral (in x) is transformed to an equivalent integral in u.
xa b
x → u
uu(a) u(b)
For example, solve∫ 1
−1x√2x+ 1dx using the substitution u = 2x+ 3.
• Step 1: Find an expression for u′.
u = 2x+ 3 =⇒ u′ = 2
• Step 2: Substitute every x with u in the integrand.
x√2x+ 3 −→ 1
2(u− 3)
√u
© 2014 Sci School
6.1 Integration by Substitution
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
• Step 3: Evaluate the transformed limits.
u(−1) = 2(−1) + 3 = 1 and u(1) = 2(1) + 3 = 5
• Step 4: Transform the integral and solve.
∫ 1
−1
x√2x+ 3dx =
1
2
∫ 1
−1
f(u)︷ ︸︸ ︷1
2(u− 3)
√u
u′︷︸︸︷(2) dx
=1
4
∫ 5
1
(u− 3)u12 du
=1
4
∫ 5
1
(u
32 − 3u
12
)du
=1
4
[2
5u
52 − 2u
32
]51
=2
5
© 2014 Sci School

6.2 Integration By Parts
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
This method is best applied to integrals of products of functions. Thetheorem is derived from the Product Rule,
(uv)′ = uv′ + vu′ =⇒ [uv]ba =
∫ b
a
uv′ dx+
∫ b
a
vu′ dx
Rearranging, we arrive at the formula for Integration by Parts.
∫ b
a
uv′ dx = [uv]ba −∫ b
a
vu′ dx
To guide our choice for u and v′, we use the DETAIL Rule:
v Dashed should be tried in order of Exponentials, Trig functions,Algebraic functions, Inverse trig functions, then Logarithms.
© 2014 Sci School

6.2 Integration by Parts
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
For example, by integration by parts to evaluate∫ π
0(1− x) cos 3x dx.
• Step 1: Identify v′ and integrate to find v.
v′ = cos 3x =⇒ v =1
3sin 3x
• Step 2: Identify u and differentiate to find u′.
u = 1− x =⇒ u′ = −1
• Step 3: Use the formula for integration by parts to rewrite the integral.∫ π
0
(1− x) cos 3x dx =
[(1− x)
(1
3sin 3x
)]π0
−∫ π
0
1
3sin 3x(−1) dx
= 0 +1
3
∫ π
0
sin 3x dx
=1
3
[−1
3cos 3x
]π0
=2
9
© 2014 Sci School
6.3 Recurrence Relationships
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
Sometimes several applications of the Integration by Parts formula is neededto evaluate an integral. This often yields recurring expressions, which can beused to quickly get to the solution.
For example, evaluate∫e2x sin x dx.
v′ = sin x =⇒ v = − cosx
u = e2x =⇒ u′ = 2e2x
Using one application of integration by parts,∫e2x sin x dx = e2x (− cosx)−
∫(− cosx)
(2e2x
)dx
= −e2x cosx+ 2
∫e2x cosx dx
© 2014 Sci School

6.3 Recurrence Relationships
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
Applying integration by parts a second time,
v′ = cosx =⇒ v = sinx
∴∫
e2x sin x dx = −e2x cosx+ 2
(e2x sin x−
∫sin x
(2e2x
)dx
)
= −e2x cosx+ 2e2x sin x− 4
∫e2x sin x dx
Noticing that∫e2x sin x dx is a recurrence of the original integral, we can
move it to the left-hand side.
5
∫e2x sin x dx = −e2x cosx+ 2e2x sinx
∴∫
e2x sin x dx =e2x
5(2 sinx− cosx) + C
© 2014 Sci School

6.3 Recurrence Relationships
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
Another powerful example occurs when u takes the form of an algebraic (orpower) function, e.g. xn.
Consider applying integration by parts to In =∫xnex dx.
v′ = ex =⇒ v = ex and u = xn =⇒ u′ = nxn−1
∴∫
xnex dx = xnex − n
∫xn−1ex dx
Written with different notation, we have
In = xnex − nIn−1
For example,∫x4ex dx can be evaluated using only algebra, since
I4 = x4ex − 4I3
= x4ex − 4(x3ex − 3
(x2ex − 2 (xex − ex)
))+ C
= ex(x4 − 4x3 + 12x2 − 24x+ 24
)+ C
© 2014 Sci School
6.4 Rational Functions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
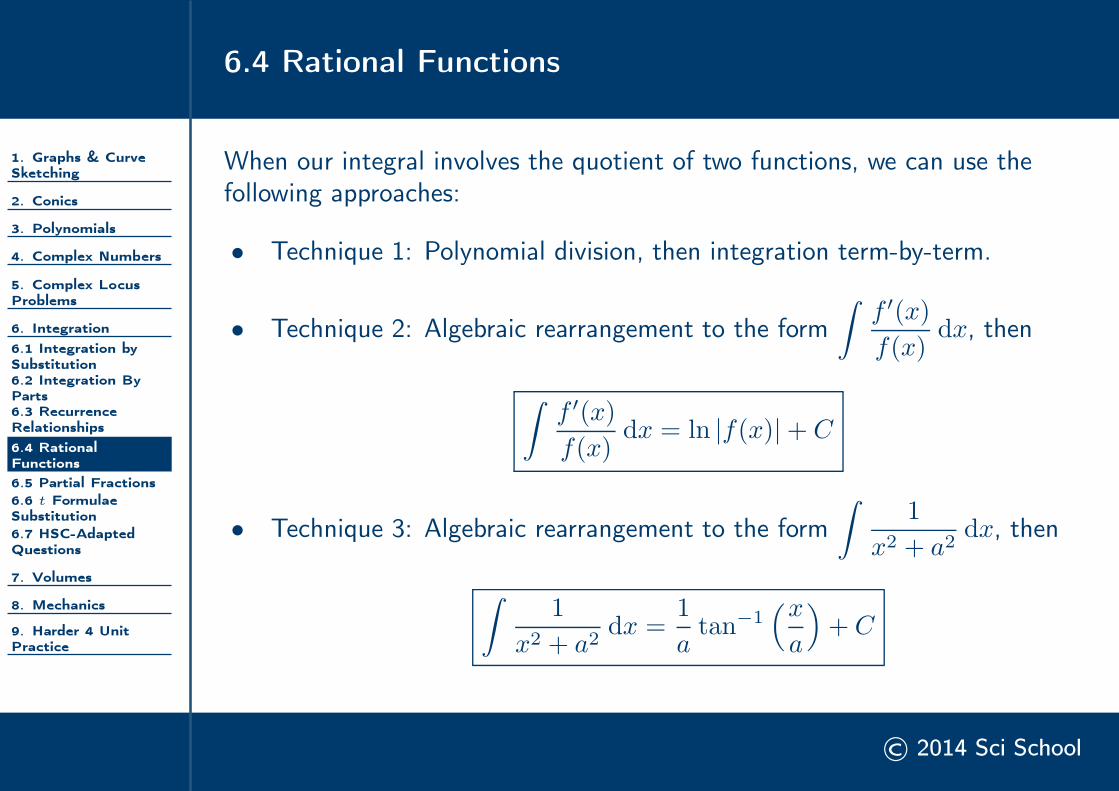
When our integral involves the quotient of two functions, we can use thefollowing approaches:
• Technique 1: Polynomial division, then integration term-by-term.
• Technique 2: Algebraic rearrangement to the form∫
f ′(x)f(x)
dx, then
∫f ′(x)f(x)
dx = ln |f(x)|+ C
• Technique 3: Algebraic rearrangement to the form∫
1
x2 + a2dx, then
∫1
x2 + a2dx =
1
atan−1
(xa
)+ C
© 2014 Sci School
6.4 Rational Functions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
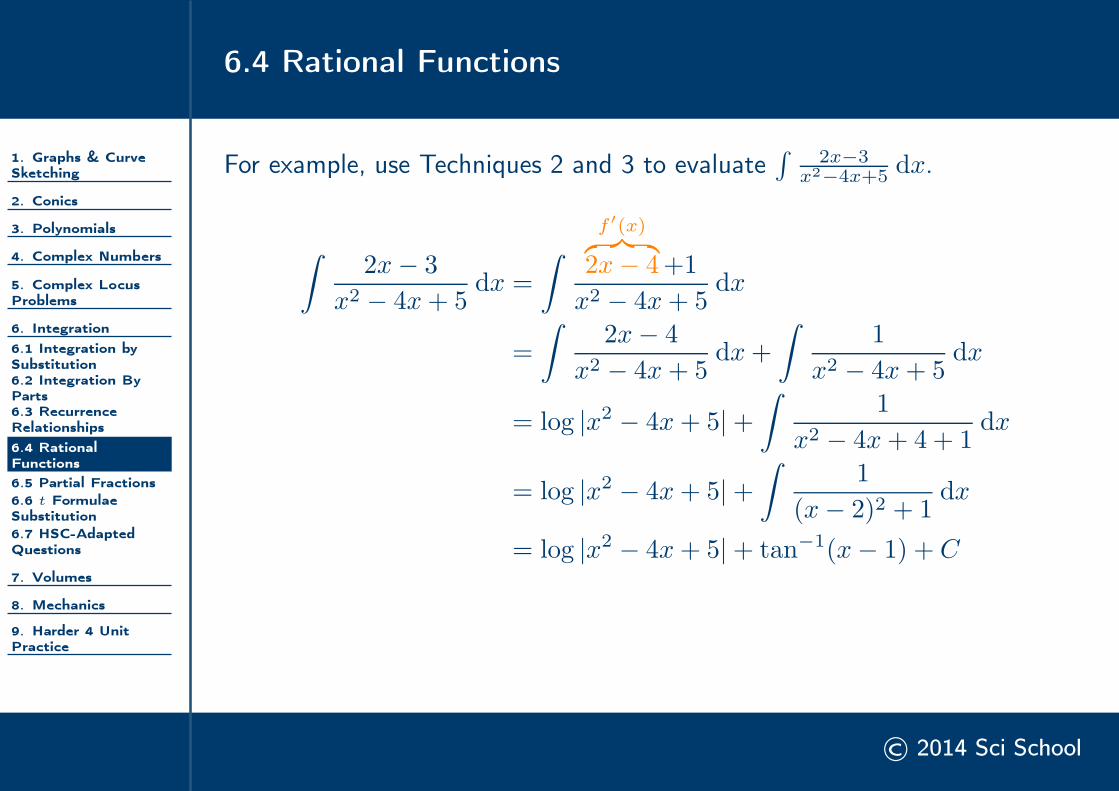
For example, use Techniques 2 and 3 to evaluate∫
2x−3x2−4x+5 dx.
∫2x− 3
x2 − 4x+ 5dx =
∫ f ′(x)︷ ︸︸ ︷2x− 4+1
x2 − 4x+ 5dx
=
∫2x− 4
x2 − 4x+ 5dx+
∫1
x2 − 4x+ 5dx
= log |x2 − 4x+ 5|+∫
1
x2 − 4x+ 4 + 1dx
= log |x2 − 4x+ 5|+∫
1
(x− 2)2 + 1dx
= log |x2 − 4x+ 5|+ tan−1(x− 1) + C
© 2014 Sci School
6.5 Partial Fractions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
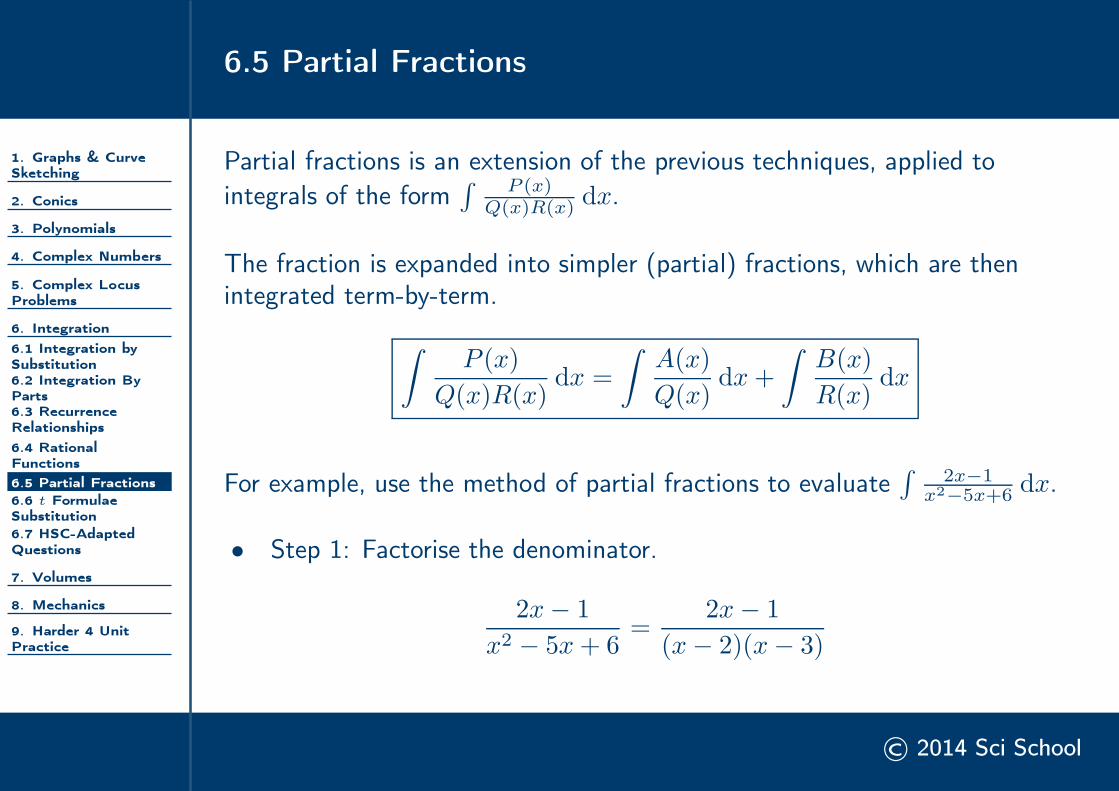
Partial fractions is an extension of the previous techniques, applied tointegrals of the form
∫ P (x)Q(x)R(x) dx.
The fraction is expanded into simpler (partial) fractions, which are thenintegrated term-by-term.
∫P (x)
Q(x)R(x)dx =
∫A(x)
Q(x)dx+
∫B(x)
R(x)dx
For example, use the method of partial fractions to evaluate∫
2x−1x2−5x+6 dx.
• Step 1: Factorise the denominator.
2x− 1
x2 − 5x+ 6=
2x− 1
(x− 2)(x− 3)
© 2014 Sci School

6.4 Partial Fractions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
• Step 2: Split into partial fractions.
2x− 1
(x− 2)(x− 3)=
A
(x− 2)+
B
(x− 3)
=⇒ 2x− 1 = A(x− 3) +B(x− 2)
• Step 3: Substitute well-chosen values of x to find A and B.
x = 2 : 2(2)− 1 = A(2− 3) + 0 x = 3 : 2(3)− 1 = 0 +B(3− 2)
∴ A = −3 ∴ B = 5
• Step 4: Integrate term-by-term.∫2x− 1
(x− 2)(x− 3)dx =
∫ (− 3
x− 2+
5
x− 3
)dx
= −3 ln |x− 2|+ 5 ln |x− 3|+ C
© 2014 Sci School

6.6 t Formulae Substitution
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
A special category of Integration by Substitution is to use t = tan(x2
)to
solve integrals of the form,∫1
a cosx+ b sin x+ cdx
Defining t = tan(x2
), our essential substitution formulae are:
dx =2dt
1 + t2sinx =
2t
1 + t2
cosx =1− t2
1 + t2tanx =
2t
1− t2
© 2014 Sci School
6.6 t Formulae Substitution
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
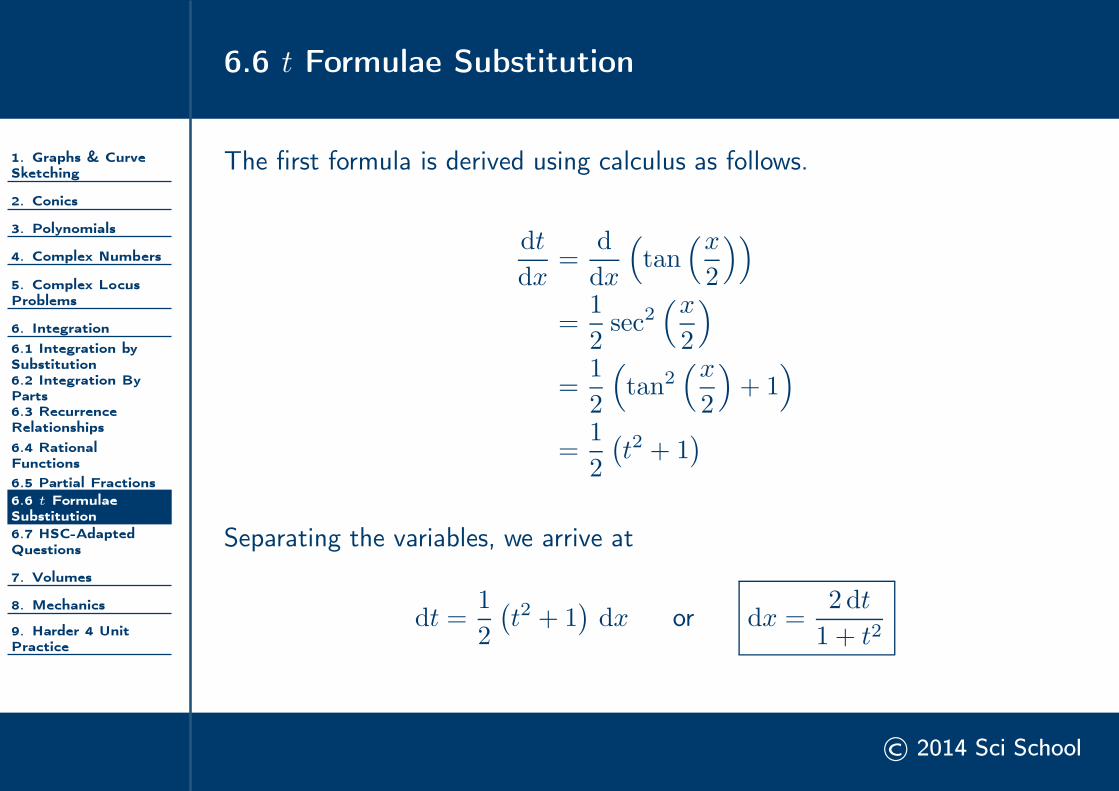
The first formula is derived using calculus as follows.
dt
dx=
d
dx
(tan
(x2
))=
1
2sec2
(x2
)=
1
2
(tan2
(x2
)+ 1)
=1
2
(t2 + 1
)
Separating the variables, we arrive at
dt =1
2
(t2 + 1
)dx or dx =
2dt
1 + t2
© 2014 Sci School
6.6 t Formulae Substitution
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
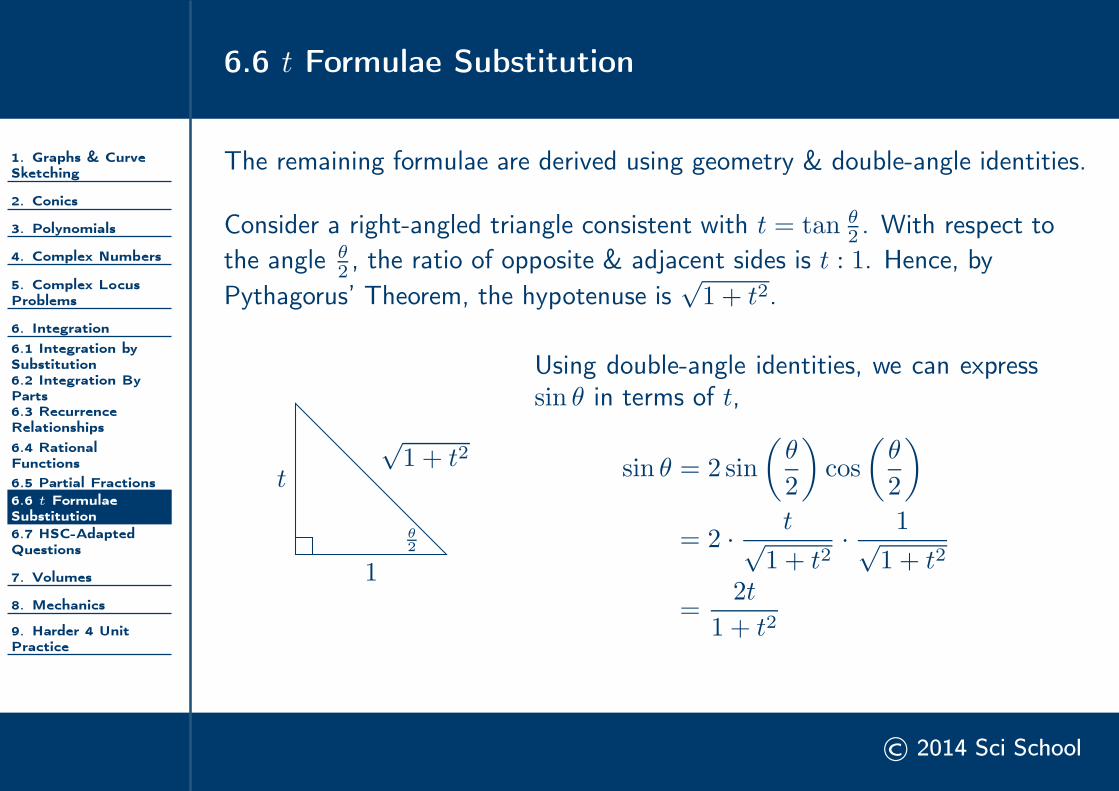
The remaining formulae are derived using geometry & double-angle identities.
Consider a right-angled triangle consistent with t = tan θ2 . With respect to
the angle θ2 , the ratio of opposite & adjacent sides is t : 1. Hence, by
Pythagorus’ Theorem, the hypotenuse is√1 + t2.
θ2
1
t
√1 + t2
Using double-angle identities, we can expresssin θ in terms of t,
sin θ = 2 sin
(θ
2
)cos
(θ
2
)= 2 · t√
1 + t2· 1√
1 + t2
=2t
1 + t2
© 2014 Sci School

6.6 t Formulae Substitution
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
Likewise for cos θ and tan θ,
cos θ = cos2(θ
2
)− sin2
(θ
2
)
=1
1 + t2− t2
1 + t2
=1− t2
1 + t2
tan θ =sin θ
cos θ
=2t
1 + t2× 1 + t2
1− t2
=2t
1− t2
© 2014 Sci School

6.6 t Formulae Substitution
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
The t-formulae are used by substituting all expressions in x, e.g. dx, sinx,cosx, and tanx, for corresponding expressions in t.
For example,∫1
3 + 2 cosxdx =
∫1
3 + 2(
1−t2
1+t2
) · 2 dt
t2 + 1
= 2
∫1
3(1 + t2) + 2(1− t2)dt
= 2
∫1
5 + t2dt
= 2
(1√5
)tan−1
(t√5
)+ C
=2√5tan−1
(1√5tan
(x2
))+ C
© 2014 Sci School

6.7 HSC-Adapted Questions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
Question 1 (3 Marks)
Evaluate ∫ e2
e
2
x lnxdx.
Solution
Rewrite the integral in the form of∫ f ′(x)
f(x) dx.
∫ e2
e
2
x lnxdx = 2
∫ e2
e
1x
lnxdx
= 2 [ln |lnx|]e2e= 2
(ln∣∣ln e2∣∣− ln |ln e|)
= 2 (ln 2− ln 1)
= 2 ln 2
© 2014 Sci School

6.7 HSC-Adapted Questions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
Question 2 (4 Marks)Solve ∫ 4
2
x2
12 + 9x2dx.
Solution
Rewrite the integral in the form of∫
1x2+a2 dx.∫ 4
2
x2
12 + 9x2dx =
1
9
∫ 4
2
9x2 + 12− 12
12 + 9x2dx
=1
9
∫ 4
2
(1− 4
4 + 3x2
)dx
=1
9
[x− 2√
3tan−1
(√3x
2
)]42
=2
81
(1− 3
√3 tan−1
(2√3)+
√3π)
© 2014 Sci School

6.7 HSC-Adapted Questions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
Question 3 (4 Marks)
Evaluate ∫ √3
3
1
1
x2√x2 + 1
dx.
Solution
Use integration by substitution, with x = tanu.
dx
du= sec2 u ∴ dx = sec2 u du
Substitute every x with u in the integrand.
1
x2√x2 + 1
−→ 1
tan2 u√tan2 u+ 1
=1
tan2 u secu
© 2014 Sci School

6.7 HSC-Adapted Questions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
When x = 1, u = tan−1(1) = π4 . When x =
√33 , u = tan−1( 1√
3) = π
6 .
Transforming the integral, we have
∫ √3
3
1
1
x2√x2 + 1
dx =
∫ π6
π4
1
tan2 u secu· sec2 u du
=
∫ π6
π4
cosu
sin2 udu
=[(− sinu)−1
]π6
π4
= − 1
sin(π6
) + 1
sin(π4
)=
√2− 2
© 2014 Sci School

6.7 HSC-Adapted Questions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
Question 4 (5 Marks)
Using the substitution t = tan x2 , or otherwise, show that
∫ 2π3
π2
1
sin x+ tanxdx = loge
√√3
e.
Solution
We need the following three t formulae:
dx =2dt
1 + t2, sin x =
2t
1 + t2, and tanx =
2t
1− t2.
Also, when x = π2 , t = tan π
4 = 1. When x = 2π3 , t = tan π
3 =√3.
© 2014 Sci School

6.7 HSC-Adapted Questions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
∫ 2π3
π2
1
sin x+ tanxdx =
∫ √3
1
12t
1+t2 + 2t1−t2
· 2 dt
1 + t2
=
∫ √3
1
(1 + t2)(1− t2)
2t− 2t3 ++2t+ 2t3· 2 dt
1 + t2
= 2
∫ √3
1
(1
4t− t2
4t
)dt
=1
2
[ln |t| − 1
2t2]√3
1
=1
2
(ln
√3− 1
)=
1
2
(ln
√3− ln e
)
= ln
(√3
e
) 12
, as required.
© 2014 Sci School

6.7 HSC-Adapted Questions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
Question 5 (7 Marks)
LetIk =
∫ π
0
cos2k+1 x dx,
where k is an integer, k ≥ 0.
(i) Show thatIk = −π + (2k + 1)
∫ π
0
x sinx cos2k x dx
for k ≥ 1. (3 Marks)
(ii) Show also thatIk =
2k
2k − 1Ik−1
for k ≥ 1. (3 Marks)
(ii) Explain why Ik = 0 for k ≥ 1. (1 Mark)
© 2014 Sci School

6.7 HSC-Adapted Questions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
Solution
(i) Using integration by parts, we have
v′ = 1 =⇒ v = x
u = cos2k+1 x =⇒ u′ = (2k + 1) cos2k x(− sinx)
Substituting these values into the integration by parts formula,
Ik =[x cos2k+1 x
]π0−∫ π
0
x(2k + 1) cos2k x(− sinx) dx
= π · (−1)2k+1 + (2k + 1)
∫ π
0
x sinx cos2k x dx
= −π + (2k + 1)
∫ π
0
x sinx cos2k x dx,
since 2k + 1 is odd for all integers k ≥ 0.
© 2014 Sci School
6.7 HSC-Adapted Questions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
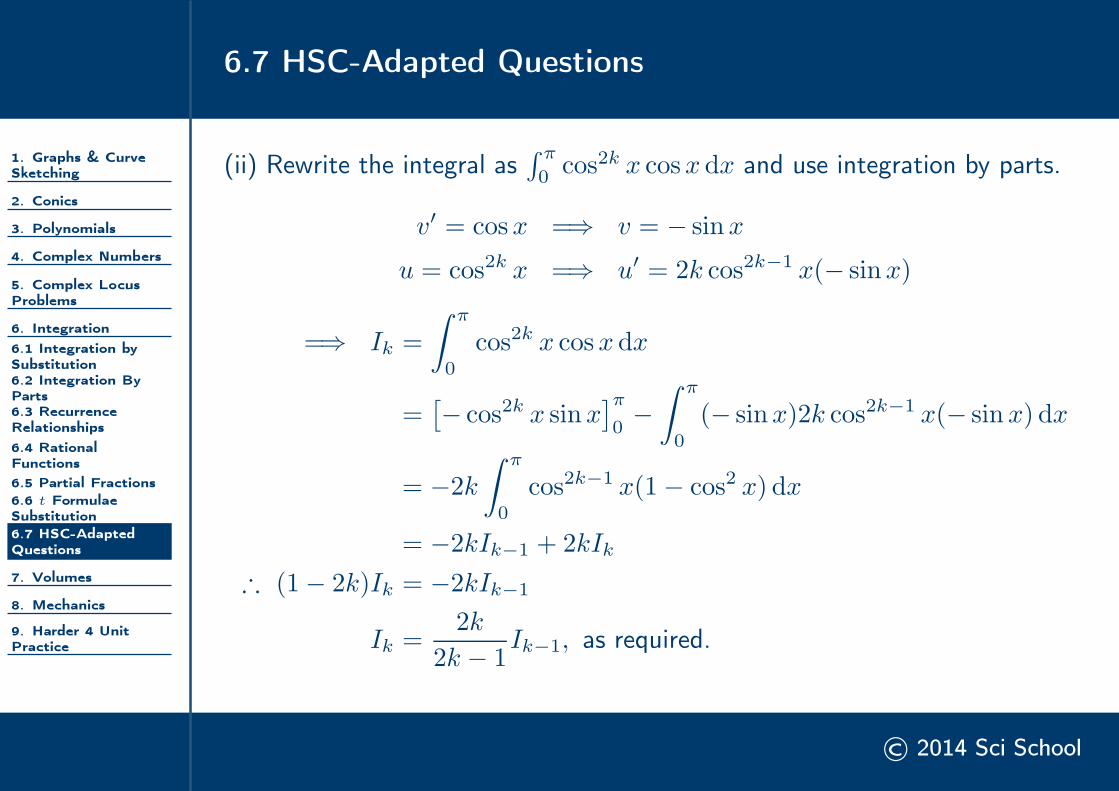
(ii) Rewrite the integral as∫ π
0cos2k x cosx dx and use integration by parts.
v′ = cosx =⇒ v = − sinx
u = cos2k x =⇒ u′ = 2k cos2k−1 x(− sinx)
=⇒ Ik =
∫ π
0
cos2k x cosx dx
=[− cos2k x sinx
]π0−∫ π
0
(− sinx)2k cos2k−1 x(− sinx) dx
= −2k
∫ π
0
cos2k−1 x(1− cos2 x) dx
= −2kIk−1 + 2kIk
∴ (1− 2k)Ik = −2kIk−1
Ik =2k
2k − 1Ik−1, as required.
© 2014 Sci School
6.7 HSC-Adapted Questions
1. Graphs & CurveSketching
2. Conics
3. Polynomials
4. Complex Numbers
5. Complex LocusProblems
6. Integration
6.1 Integration bySubstitution6.2 Integration ByParts6.3 RecurrenceRelationships
6.4 RationalFunctions
6.5 Partial Fractions6.6 t FormulaeSubstitution6.7 HSC-AdaptedQuestions
7. Volumes
8. Mechanics
9. Harder 4 UnitPractice
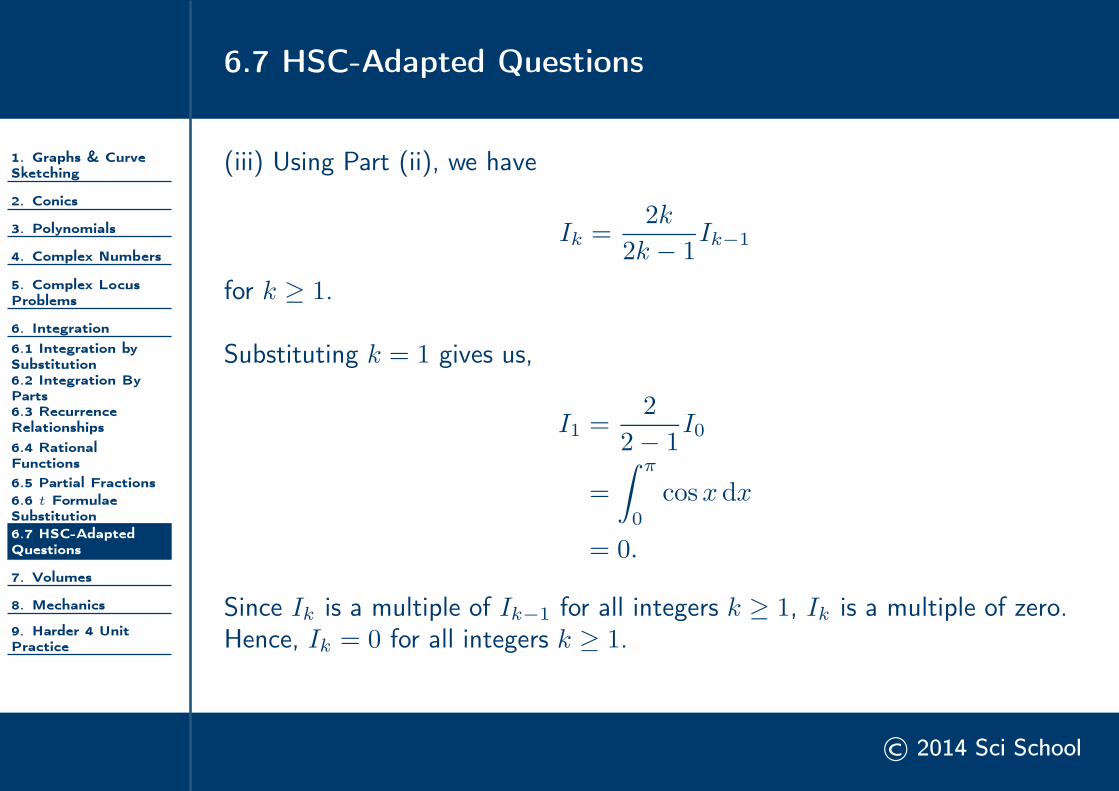
(iii) Using Part (ii), we have
Ik =2k
2k − 1Ik−1
for k ≥ 1.
Substituting k = 1 gives us,
I1 =2
2− 1I0
=
∫ π
0
cosx dx
= 0.
Since Ik is a multiple of Ik−1 for all integers k ≥ 1, Ik is a multiple of zero.Hence, Ik = 0 for all integers k ≥ 1.
© 2014 Sci School