http://2.bp.blogspot.com/-...
TRANSCRIPT
http://2.bp.blogspot.com/-v_poyNTLlVg/UJ7fgOux0tI/AAAAAAAAKpU/D8_9jtuRkFo/s1600/Volkswagen%2BAqua%2BHovercraft%2BConcept.jpg
Milestone 9Team 4thewinSection 0102

Table of Contents1. Introduction
a. Project Taskb. Team Mission Statement
2. Gantt Chart3. Preliminary Design4. Final Design5. Bill of Materials6. Construction Details7. Product Performance 8. Conclusion
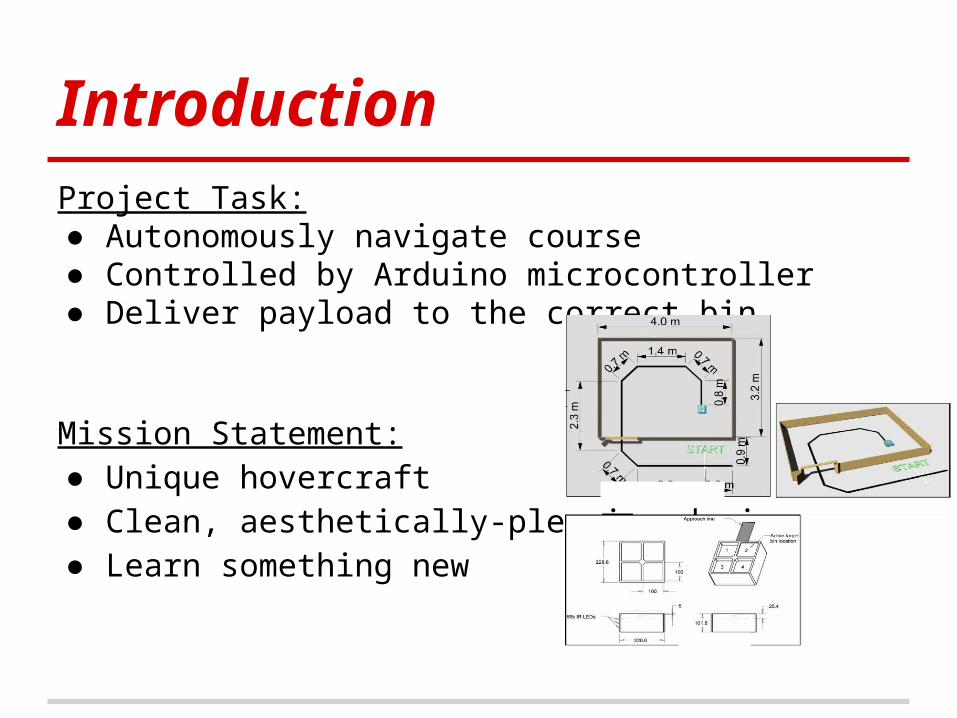
IntroductionProject Task: ● Autonomously navigate course ● Controlled by Arduino microcontroller● Deliver payload to the correct bin
Mission Statement:● Unique hovercraft● Clean, aesthetically-pleasing design ● Learn something new

Gantt Chart
Key Completed Needs to be completed
Critical Milestone due

Preliminary Design
Structure:● Rectangular plenum (40cm x 60cm)● Mass(deck): 0.596 kilograms● Soft skirt + double deck● Material: Balsa and Foam● “Water Tank” ballast
Payload Delivery:● “Firetruck ladder” ● 2 whisker touch sensors → cut levitation, switch to payload only with
pedestal contact● “Bucket” for payload● Light sensors to sense correct bin

Preliminary DesignLevitation(1): Axial - 3212 JH3 (DC 12V) ● Mass: 0.280 kg● 92 x 92 x 38 mm● Airflow: 237 m^3/hr
Propulsion(2): Axial - Q622-ND (DC 5V)● Mass(1): 0.053 kg● 60 x 60 x 25 mm● Air Flow: 24.3 CFM (0.688m³/min)
Electronics:● Servos for payload delivery system (3) ● Light sensors w/shroud (3 in front) ● LEDs for ambient light underneath shroud● Sensors for Payload Delivery System (1)

Preliminary Design IssuesStructure, Skirt, and PDS:
● Materials for decks not suited for design
● Water Tank Ballast unneeded
● Original bucket idea impractical
● Vanes for Airflow unneeded
● Skirt location changed
● Payload Material changed
Electronics:
● Reduced # of sensors
● Less servos on payload

Final Design: Structure
● 8 1”x1”x1” posts supporting top deck
● Hot glue to secure decks
● Original amount of holes did not provide
enough pressure

Final Design: Fans● Levitation Fan
o Ebm-Pabst 4112NH3 Axial● Propulsion Fans
o Two Delta Electronics PFB0912UHE Axial● Levitation Fan mounted at Center of pressure
o Propulsion Fans mounted in line on each side of Levitation Fan

Final Design: Payload Delivery
Toy ladder with bucket for payload storage:
● 2 servos o X-axis movement (forward/backward)o Z-axis movement (circular base)
● 1 Arduino Sidekick servoo opens the box on the ladder
Movement:● Ladder holds deliverable in place● Shutoff timer ● Shut off levitation fan ● Ladder extends above pedestal ● Light sensors find correct bin due to reflectivity

Final Design: Power
● Levitation & Propulsion - 12V 4200 mAh battery● Arduino, sensors, servos - 7.2V 3000 mAh battery● Servo voltage regulation - 3 diodes in series ● Power control of fans - 3 MOSFETs

● Sensors○ 5 Light-to-Frequency Converters○ 1 Photoresistor
● Actuators○ 2 Hi-tec Servos○ 1 Arduino Sidekick Servo
Final Design: Sensors and Actuators

Final Design: Control AlgorithmMiddle sensor reads darkYes No
Left fan& Right fan= HIGH
BACK RIGHT = dark ORFRONT RIGHT = dark
BACK LEFT = darkORFRONT LEFT = dark
FRONT LEFT & BACK RIGHT = dark
FRONT RIGHT & BACK LEFT = dark
RIGHT fan = HIGHORLEFT fan = HIGH
LEFT fan = HIGHORRIGHT fan = HIGH
LEFT fan = LOW & Right propulsion = HIGH
Left fan = HIGH & RIGHT fan = LOW
Continue until middle sensor reads dark

Final Design: Control Algorithm
Does photoresistor read dark?Yes No
Rotate 1→ 2
Rotate 2→ 1
Extend 1→ 4
Rotate 4→ 3
Rotate 3→ 4
Unextend 4→ 1
Drop payload

Bill of MaterialsItem Manufacturer Vendor Quantity Cost Per
Unit
Wood (Sanded Plywood)
N/A Home Depot 1 $9.97
Foamular Project Panel Foamular Home Depot 1 $5.48
Ripstop Nylon, gray N/A JoAnn's Fabrics 1 $7.99
Velcro Velcro USA Home Depot 1 $3.38
Spray paint Rust-oleum Home Depot 2 $3.87
Ladder 3D Printer at Mckeldin 3D Printer at Mckeldin 1 $1.2
Cardboard N/A N/A 1 $.50
3D-printed payload delivery system
3D Printer at Mckeldin 3D Printer at Mckeldin 1 $20
Tape N/A N/A 1 $2
12V 4200mAh Battery Powerizer batteryspace.com 1 $49.95

Bill of MaterialsItem Manufacturer Vendor Quantity Cost Per Unit
7.2V Battery Venom Power Hobbytown USA 1 $20.66
Arduino Uno Arduino ENES100 1 $25.00
TSL237 Sensors Parallax Inc. Parallax Inc. 5 $2.99
Diodes N/A Radioshack 3 $1.00
MOSFET N/A ENES100 3 $1.00
Photoresistor N/A SeeedStudio 1 $0.50
Perfboard N/A Radioshack 1 $3.49
Heat Sinks N/A ENES100 3 $2.00
Hitec Servo N/A A Main Hobbies 2 $7.99
Tamiya Connectors
N/A Pololu 4 $2.25
Propulsion Fans Delta Electronics Digikey 2 $31.82

Bill of Materials
Item Manufacturer Vendor Quantity Cost Per Unit
Leviation Fan EBM-Papst Mouser Electronics
1 $68.57
Lev Fan Guards Orion Fans Digikey 1 $6.48
Prop. Fan Guards EBM-Papst Digikey 4 $1.12
Total Cost $345.73

Construction Details: “Big Red”● Hovercraft design was driven by an overarching theme● “Big Red” alludes to a fire truck design ● 3D printed payload delivery system - ladder and bucket ● Red deck, red payload supports, chrome tape for skirt

Product Performance/Evaluation
● Almost made it to our design point ● Didn’t qualify for competition but the
hovercraft almost works ● Team had good spirit but didn’t exactly follow
Gantt chart, which led to missed milestones● Subgroups didn’t work out how we expected

Conclusion/Lessons Learned
● Hovercraft does not accurately navigate the course● Building a hovercraft is not easy● Start planning earlier● Test individual components more often and sooner● Be willing to make sacrifices needed to remain on schedule● Be flexible with switching roles within subgroups● What is intended does not always happen
Conclusion:● Learned a lot about engineering and teamwork● We grew as a team and as friends

Acknowledgements
Thank you to Ms. Lopez-Roshwalb and Dan Sullivan for the advice and support!