制御工学i 第10回 安定性...
TRANSCRIPT

2010/6/21 1
制御工学I 第10回安定性
ラウス,フルビッツの安定判別
平成22年6月21日

2010/6/21 2
授業の予定
• 制御工学概論(1回)– 制御技術は現在様々な工学分野において重要な基本技術となっている。工学における制御工学
の位置づけと歴史について説明する。さらに、制御システムの基本構成と種類を紹介する。
• ラプラス変換(1回)– 制御工学、特に古典制御ではラプラス変換が重要な役割を果たしている。ラプラス変換と逆ラプラ
ス変換の定義を紹介し、微分方程式のラプラス変換について解説する。
• 制御システムのモデリングと伝達関数(3回)– システムの相似性について概説し、システムの入出力特性を表す手法である伝達関数について詳
述する。システムの図的表現であるブロック線図とその等価変換について解説する。
• 過渡特性(3回)– システムの過渡状態を評価する方法であるインパルス応答とインディシャル応答について解説する。
システムの速応性や安定性の指標である整定時間、立ち上がり量、行き過ぎ量について述べる。
• 安定性(2回)– システムの安定性の概念を述べ、安定性を判定する代数的方法であるラウス-フルビッツの方法に
ついて説明する。
• 周波数特性(4回)– 周波数領域におけるシステムの特性を周波数特性という。周波数特性と伝達関数との関係を説明
し、ベクトル軌跡とボード線図の作成方法を説明する。

2010/6/21 3
リアプノフ安定性
• (微分量が0)とする状態 →平衡状態
– 平衡点
• 平衡点に摂動を与えた系の解 の時間経過を考える。ただし, は初期値。
• 定義 ならば,全てのt>=t0に対してとなるような実数aが存在すれば,
平衡点 は安定。存在しなければ不安定。
– 平衡点 が安定かつ, のときは漸近安定。
0=x& ex
ex( )00 ,, txtx
00 , tx
δ≤− xx0
( ) axtxtx e ≤−00 ,,ex
ex ( ) 0,, 00lim =−∞→
et
xtxtx ex

2010/6/21 4
漸近安定
ex0x
δa
不安定
安定漸近安定

2010/6/21 5
内部安定性
• 零入力応答
– 入力が零で,初期条件のみに対する応答
– 初期状態
• 内部安定(漸近安定:リアプノフの安定性)– どのような初期状態x0に対しても,
t→∞でx(t)=0となる
• システムが内部安定となる必要十分条件
– 特性方程式の根の実部が全て負⇔漸近安定
( ) 00 xx =
( ) ktextx 0=

2010/6/21 6
外部安定性
• 零状態応答
– 初期状態が零で,入力のみに対する応答
• 有界な入力u(t)に対する零状態応答
– 有界な入力とは,下式に適当な正数k1が存在する
• システムが外部安定・入出力安定・有界入力有界出力(BIBO:Bounded Input Bounded Output)安定
– 有界な出力とは,下式において適当な正数k2が存在する
– 有界な入力u(t)に対してk2が存在する場合BIBO安定
( ) ∞<≤∞<≤ tktu 0,1
( ) ∞<≤∞<≤ tkty 0,2

2010/6/21 7
BIBO安定
• システムのBIBO安定と等価な条件– 伝達関数の全ての極(特性方程式の根)が負の実部を持つ。 → 漸近安定
– インパルス応答g(t)に対して,次式を満たす正数kが存在
• 有界入力u(t)に対する出力の応答
任意のtに対して有界
( ) ∞<≤∫∞
kdttg0
( ) ( ) ( ) ( ) ( )
( ) ∞<≤−≤
−≤−=
∫
∫∫kkdtgk
dutgdutgty
t
tt
101
00
ττ
ττττττ

2010/6/21 8
BIBO安定
• インパルス応答g(t)が有界でない場合
– 有界な入力u(τ)
– 出力y(t)は有界ではない
• 変数変換が
( ) ( )( ) ( )⎩
⎨⎧
<−−=≥−=
0101
ττττ
tgforutgforu
( ) ( ) ( ) ( )∫∫ −=−=tt
dtgdutgty00
τττττ
τσ −= t τσ dd −=
( ) ( ) ( )∫∫ =−=−
t
tdgdgty
0
0σσσσ
出力が有界でないのでBIBO安定が成立しない

2010/6/21 9
制御システムの安定性判別方法(特性方程式の根を調べる方法)
• 特性方程式の特性根を求めて調べる– 特性方程式を解く
– 根軌跡による方法
• 特性方程式の係数を用いて調べる– ラウス-フルビッツの方法
• ベクトル軌跡による方法– ナイキストの方法
• ボード線図を用いた方法– ゲイン余裕,位相余裕

2010/6/21 10
特性方程式の係数を用いた安定判別法
• 伝達関数の特性方程式の根の実部
– 高次の代数方程式の求解は困難
– 根の実部の正負判別で十分
– 代数方程式を解かないで安定判別
• 特性方程式の解(因数分解)
– pi:実数根,σi:複素根実部,ωi:複素根虚部
( ) ( ){ }∏∏=
−
=
−−
+++=
++++=μμ
ωσ1
222
1
11100
iii
n
jj
nn
nn
sps
sasasaa L

2010/6/21 11
特性方程式の係数を用いた安定判別法
• 全ての根の実部が負
• skの係数は全て正
– 全ての根の実部が負となる必要条件
( ) ( ){ }
( ) { }∏∏
∏∏
=
−
=
=
−
=
++++=
+++=
μμ
μμ
ωσσ
ωσ
1
2222
1
1
222
1
2
0
iiii
n
jj
iii
n
jj
ssps
sps
( ) ( )μσμ LL 10,210 =>−=> injp ij
0,02,0 22 >+>> iiijp ωσσ
( )100 −=> nkak L十分条件は?

2010/6/21 12
ラウスの安定判別法
• 特性多項式の係数からラウス表を作成
– 係数を変換
– 変換した係数の変換
nnn ssasaa ++++ −−
1110 L
⎪⎪
⎩
⎪⎪
⎨
⎧
=
=
=
⎪⎪
⎩
⎪⎪
⎨
⎧
=
=
=
−
−
−
−
−
MM
51
2
31
1
11
1
40
2
20
1
00 1
n
n
n
n
n
a
a
a
a
a
α
α
α
α
α
α
11111
0
1101
102 +
++++
+++
++ +=
−= k
ikk
ik
ki
kki
kk
i αγαα
ααααα
ただし 1, 001
0
01 == ++ α
ααγ k
k
k

2010/6/21 13
ラウスの安定判別法
• ラウス表
– 安定判別法(根の実部が全て負となる必要十分条件)
n
n
nn
m
mm
mm
mmm
n
n
n
n
sss
ssss
0
10
21
20
32
32
31
30
21
22
22
21
20
11
12
12
11
10
001
02
02
01
00
0
1
2
3
2
1
αα
αα
αααααααααααααα
αααααα
−
−−
−
−−
−−
−−
−
−
−
MM
L
L
L
L
M
( )nkk ,,2,10 L=>γ( )nii ,,2,100 L=>α または

2010/6/21 14
フルビッツの安定判別法
• 特性多項式の係数からフルビッツ行列を作成– nxn行列
– 要素an-1よりはじめる
• 一つ右に移る毎に係数を2減らす
• 一つ下に移る毎に係数を1増やすす
• an=1• ak=0 k>n or k<0 ⎥
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=−
−
−−
−−
−−−
0
1
2
31
42
531
00000
1000100010
a
aaaaaaaaa
Hn
n
nn
nn
nnn
M
L
L
L
L

2010/6/21 15
フルビッツの安定判別法
• フルビッツ行列
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
−
−−
−−
−−−
−
−−
−−
−−−
02
41
62
831
2
0231
142
0531
000000
000000000
aaaaaaaaaaa
aaaaaa
aaaaaaaa
H
nn
nn
nnn
nnn
nn
nn
nnn
nnn
L
MM
L
LMML
LL
LL
LL

2010/6/21 16
フルビッツの安定判別法
• フルビッツ行列式の作成– 左上kxk小行列の行列式⊿k(k=1,2,・・・,n)(主座小行列式)
• 安定判別法
– 特性方程式の根の実部が全て負となる
Hdet=Δn⎥⎦
⎤⎢⎣
⎡=Δ
−
−−
2
312 1 n
nn
aaa
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=Δ
−−
−−
−−−
31
42
531
3
01
nn
nn
nnn
aaaaaaa
11 −=Δ na
0>Δk

2010/6/21 17
ラウス法とフルビッツ法の等価性
• フルビッツ行列のラウス配列要素表示
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=−
−
−−
−−
−−−
0000
0
0
0000
101
01
00
10
01
00
11
10
02
01
00
12
11
10
1
2
31
42
531
aaaaaaaaaaaa
aaaaaaaaa
Hn
n
nn
nn
nnn
L
L
L
L
L
L
L
L

2010/6/21 18
ラウス法とフルビッツ法の等価性
• 係数行列をつくる
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
−
=Γ
100000
1001
10001
01
1
1
1
1
O
γ
γ
γ
2010/6/21 19
ラウス法とフルビッツ法の等価性
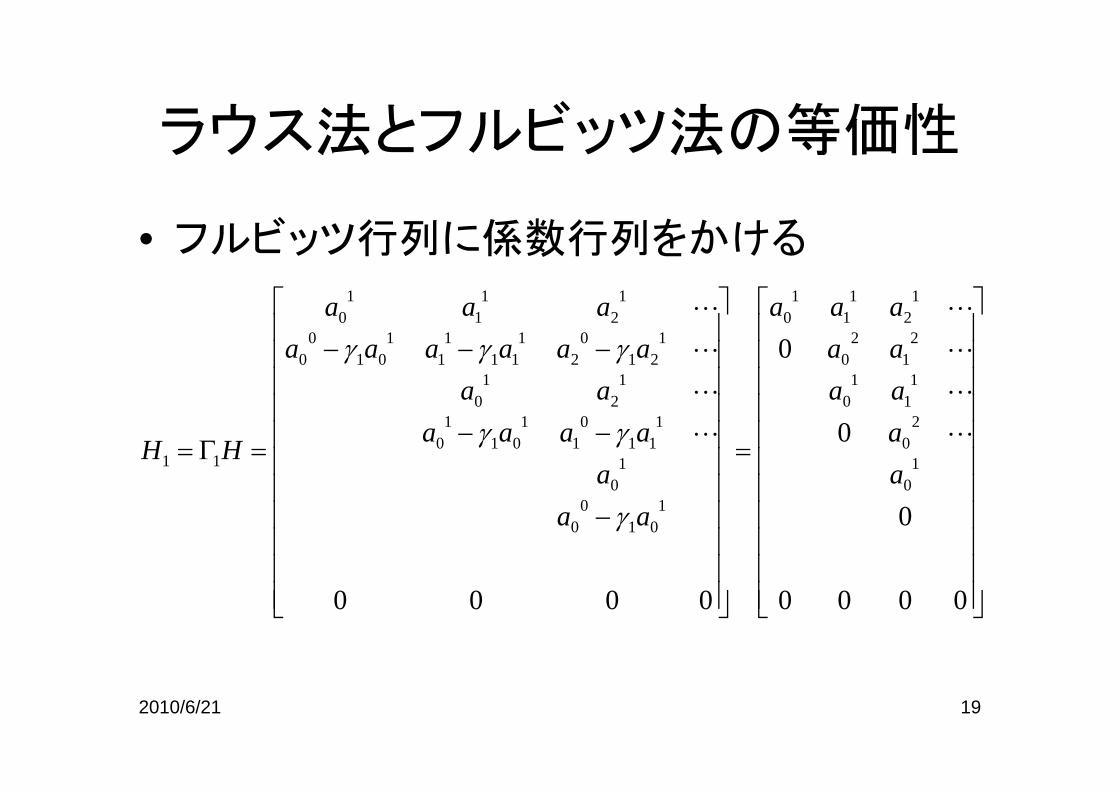
• フルビッツ行列に係数行列をかける
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−−
−−−
=Γ=
0000
0
0
0
0000
10
20
11
10
21
20
12
11
10
101
00
10
111
01
101
10
12
10
121
02
111
11
101
00
12
11
10
11 aaaaaaaaa
aaa
aaaaaa
aaaaaaaaa
HH L
L
L
L
L
L
L
L
γ
γγ
γγγ

2010/6/21 20
ラウス法とフルビッツ法の等価性
• 係数行列2をつくる
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
=Γ
10000
01
1010010
01
2
2
2
O
γ
γ

2010/6/21 21
ラウス法とフルビッツ法の等価性
• フルビッツ行列に係数行列をかける
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−=Γ=
000
0
00
000
0
00
20
30
21
20
12
11
10
20
212
11
21
20
12
11
10
122
M
L
L
L
L
M
L
L
L
L
aaaaaaa
aaa
aaaaa
HHγ

2010/6/21 22
ラウス法とフルビッツ法の等価性
• 同様にして
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−=Γ
1010
10
1010
010001
O
O
k
kk
γ
γk-1個
1−Γ= kkk HH

2010/6/21 23
ラウス法とフルビッツ法の等価性
• 変形フルビッツ行列
– の左上kxk小行列の行列式(主座小行列式)⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=−
−
−
−
n
n
n
n
n
a
aaaaaaaaaaaaaa
H
0
43
40
33
31
30
22
22
21
20
11
13
12
11
10
0
~
ML
L
L
L
L
HHH nnnn 111~ ΓΓΓ=Γ= −− L
nkaaa kk ,,2,1,~
02
01
0 LL ==Δ
H~

2010/6/21 24
ラウス法とフルビッツ法の等価性
• 係数行列について– は下三角行列,対角要素は全て1– も対角要素が全て1の下三角行列11
~ ΓΓΓ=Γ − Lnnn
kΓ
( )( )( ) ( ){ }( ) ( )
( ) k
k
kkHkkHkk
kkHkk
kkH
kkH
Δ=×=
××Γ=
×××Γ=
×Γ=
×=Δ
小行列の左上
小行列の左上小行列の左上
小行列の左上小行列の左上
小行列の左上
小行列の左上
1det~det
~det
~det
~det~
nkaaa kk ,,2,1,0
20
10 LL ==Δ
nka k ,,2,1,00 L=> nkk ,,2,1,0 L=>Δ
ラウスの安定判別法 フルビッツの安定判別法

2010/6/21 25
根軌跡法
• システムの過渡応答は極の位置(値)に関係する
• 制御ゲインにより極の場所(値)が変わる– どのように変化するのか注目
• 設計– 適切なゲインの設定により,極を所期の場所に配置
– システムの極や零の追加の影響の定性的な評価

2010/6/21 26
根軌跡
• ゲインKを持つフィードバック制御システム– 閉ループ伝達関数
• sの多項式で表す
• ac+kbd=0→根は伝達関数の極
• bc=0 →根は伝達関数の零点
• K:0→∞で伝達関数の極(特性方程式の根)は変化
K G(s)+-
R(s) C(s)
H(s)( )( )
( )( ) ( )sHsKG
sKGsRsC
+=
1
( ) ( )( ) ( ) ( )
( )scsdsH
sasbsG == ,
( )( )
( )( )( )( )
( )( )
( )( )
( ) ( )( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( ) ( )sdsKbscsa
scsbKsdsKbscsa
scsasasbK
scsd
sasbK
sasbK
sRsC
+=
+=
+=
1
根軌跡根のs平面上の変化

2010/6/21 27
根軌跡の例
• 二次遅れシステム– 特性方程式
• K=0• 0≦K≦a2/4
• a2/4<K
• 固有角周波数
• 減衰定数
( )( ) Kass
KsRsC
++= 2
02 =++ Kassass −== 21 ,0
24
2,
2
21Kaass −
±−=
24
2,
2
21aKjass −
±−=
Kn =ω
Ka
2=ζ
-a 0-a/2
xx

2010/6/21 28
根軌跡の性質1
• 伝達関数– d(s):n次,c(s):m次, m<n
• 始点 K=0: →伝達関数の極に対応
• 終点 K=∞: →m個は零点に対応
– 極は零点より多い(m<n)ので残りは無限遠点に終わる
• 実軸対称 特性方程式の根は実数または共役複素数なので,根の配置は実軸対称
• 枝数 特性方程式の根はn個→根軌跡の枝数n本
( ) 0=sd
( ) ( ) ( )( ) 011 =+=+sdscKsHsKG
( ) 0=sKc
2010/6/21 29
根軌跡
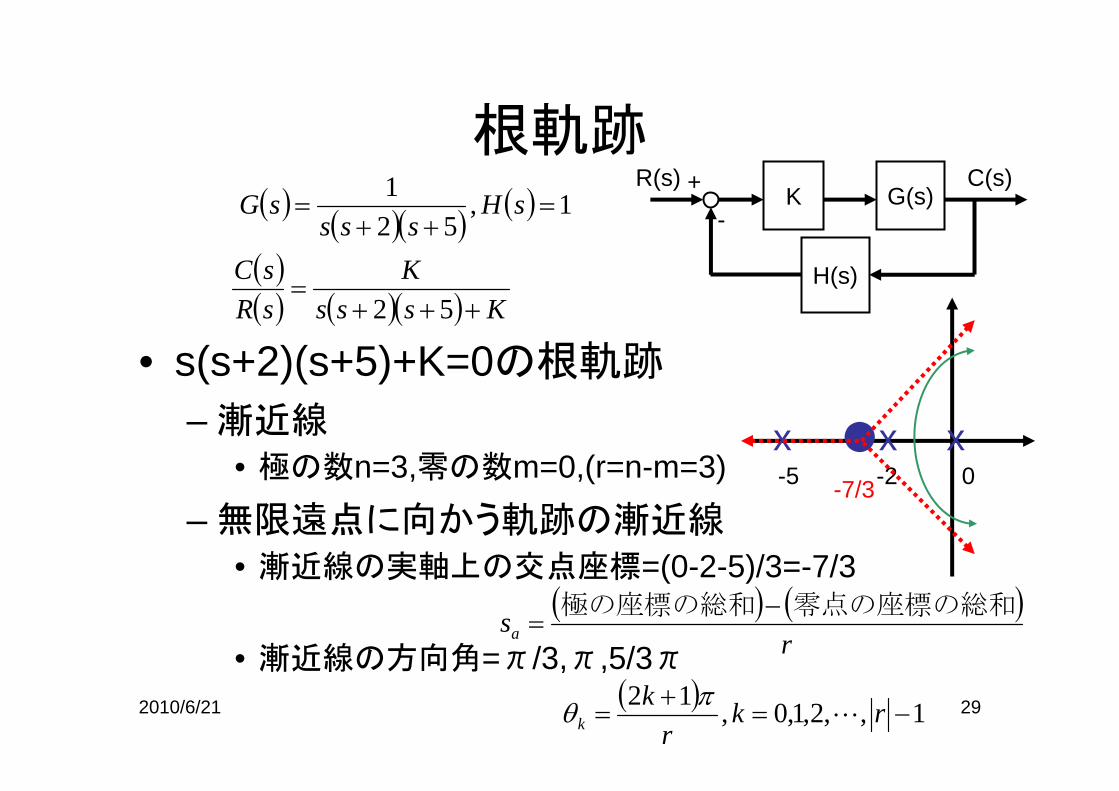
• s(s+2)(s+5)+K=0の根軌跡
– 漸近線• 極の数n=3,零の数m=0,(r=n-m=3)
– 無限遠点に向かう軌跡の漸近線• 漸近線の実軸上の交点座標=(0-2-5)/3=-7/3
• 漸近線の方向角=π/3,π,5/3π
K G(s)+-
R(s) C(s)
H(s)( )( ) ( )( ) Ksss
KsRsC
+++=
52
( ) ( )( ) ( ) 1,52
1=
++= sH
ssssG
( ) ( )r
sa零点の座標の総和極の座標の総和 −
=
( ) 1,,2,1,0,12−=
+= rk
rk
k Lπθ
0x xx-2-5
●
-7/3

2010/6/21 30
根軌跡
• 極,零点の付加により根軌跡が変化
– 二次遅れシステム
– 極の付加
• 根軌跡を極から離す
– 零点付加
• 零点に根軌跡を引き込む
( ) ( ) ( )asssHsKG
+=
1
( ) ( ) ( )( )bsasssHsKG
++=
1
( ) ( ) ( )asscssHsKG++
=
-a 0-a/2
xx
-b 0-axx x
-a-b/2
-c 0-axO x
a-c