image restoration. modified from restoration.ppt by yu hen hu what is image restoration the purpose...
TRANSCRIPT

Image Restoration
Modified from restoration.ppt by Yu Hen Hu
What is Image Restoration
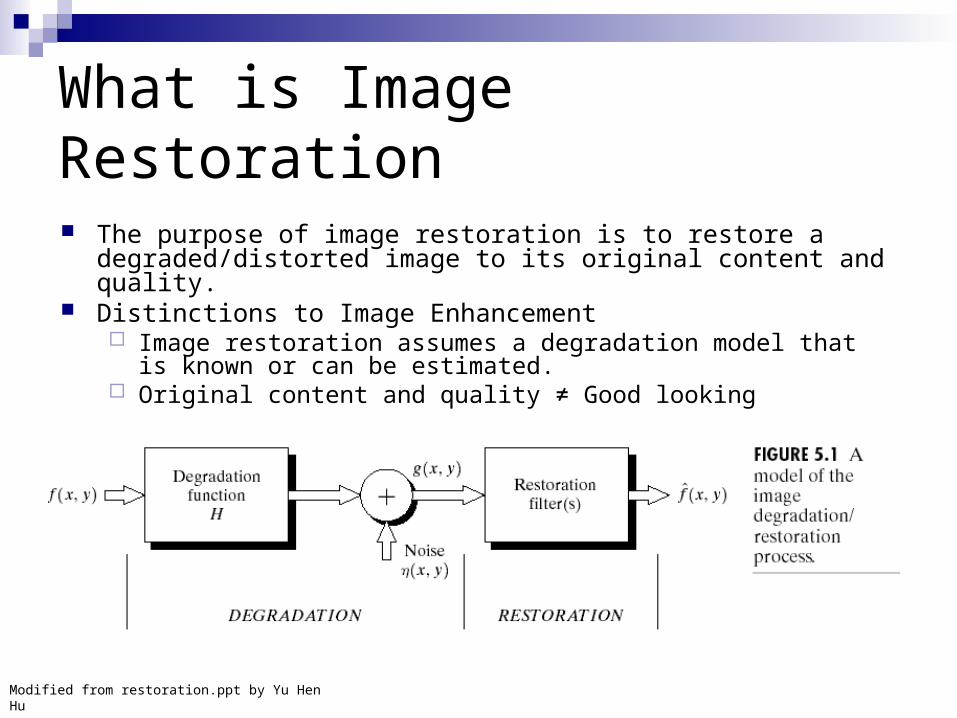
The purpose of image restoration is to restore a degraded/distorted image to its original content and quality.
Distinctions to Image Enhancement Image restoration assumes a degradation model that is known or can
be estimated. Original content and quality ≠ Good looking
Modified from restoration.ppt by Yu Hen Hu
Interactive Restoration
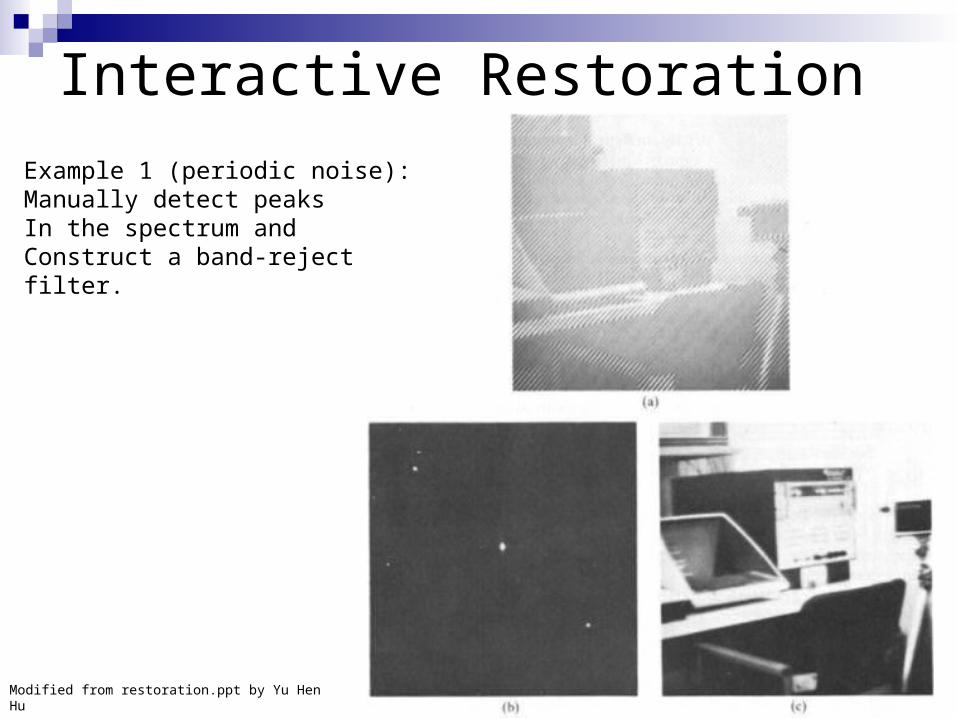
Example 1 (periodic noise):Manually detect peaksIn the spectrum andConstruct a band-rejectfilter.
Modified from restoration.ppt by Yu Hen Hu
Interactive RestorationExample 2:
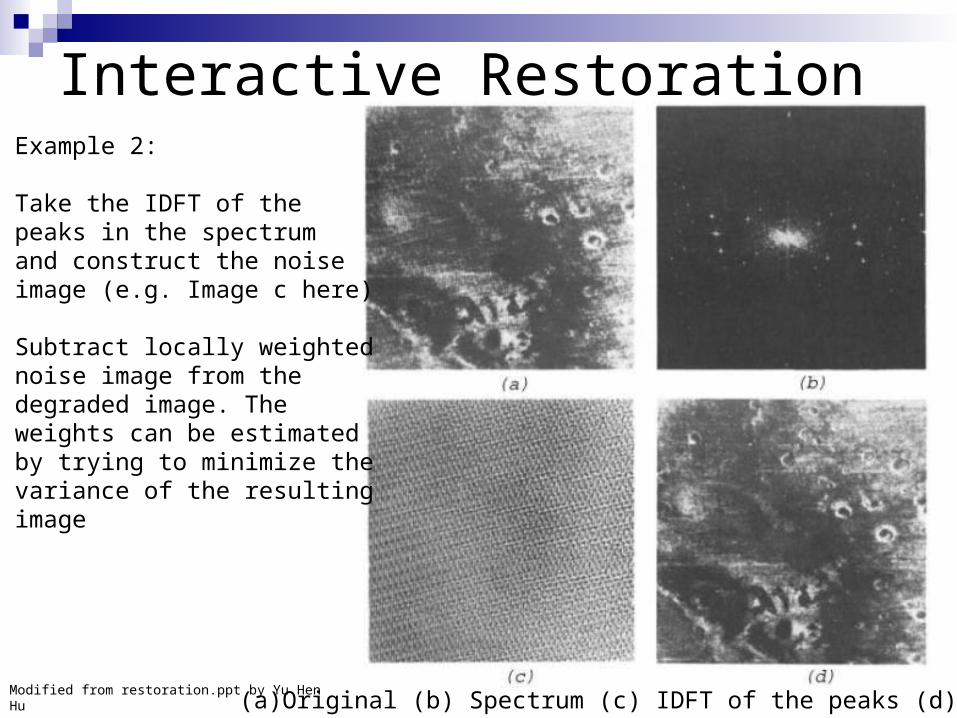
Take the IDFT of thepeaks in the spectrumand construct the noiseimage (e.g. Image c here)
Subtract locally weightednoise image from thedegraded image. Theweights can be estimatedby trying to minimize thevariance of the resulting image
(a)Original (b) Spectrum (c) IDFT of the peaks (d) Result
Modified from restoration.ppt by Yu Hen Hu
Image Degradation Model
Spatial variant degradation model
Spatial-invariant degradation model
Frequency domain representation
( , ) ( , , , ) ( , ) ( , )g x y h x y m n f m n x y
( , ) ( , ) ( , ) ( , )g x y h x m y n f m n x y
( , ) ( , ) ( , ) ( , )G u v H u v F u v N u v
Modified from restoration.ppt by Yu Hen Hu
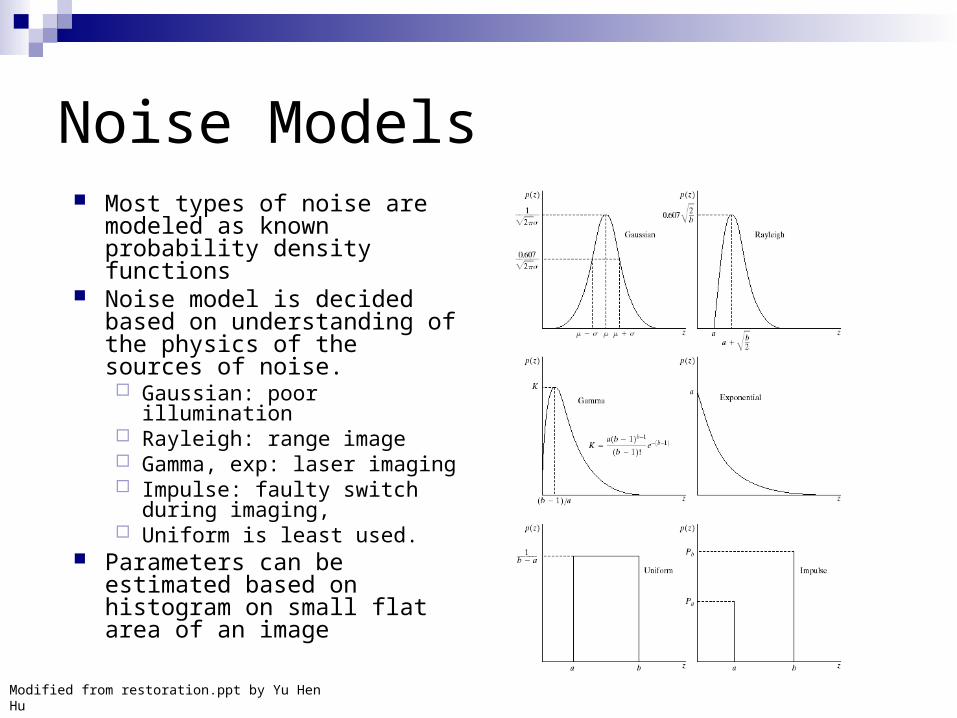
Noise Models Most types of noise are
modeled as known probability density functions
Noise model is decided based on understanding of the physics of the sources of noise. Gaussian: poor illumination Rayleigh: range image Gamma, exp: laser imaging Impulse: faulty switch during
imaging, Uniform is least used.
Parameters can be estimated based on histogram on small flat area of an image
Modified from restoration.ppt by Yu Hen Hu
Noise Removal Restoration Method
Mean filters Arithmetic mean filter Geometric mean filter Harmonic mean filter Contra-harmonic mean
filter Order statistics filters
Median filter Max and min filters Mid-point filter alpha-trimmed filters
Adaptive filters Adaptive local noise
reduction filter Adaptive median filter
Modified from restoration.ppt by Yu Hen Hu
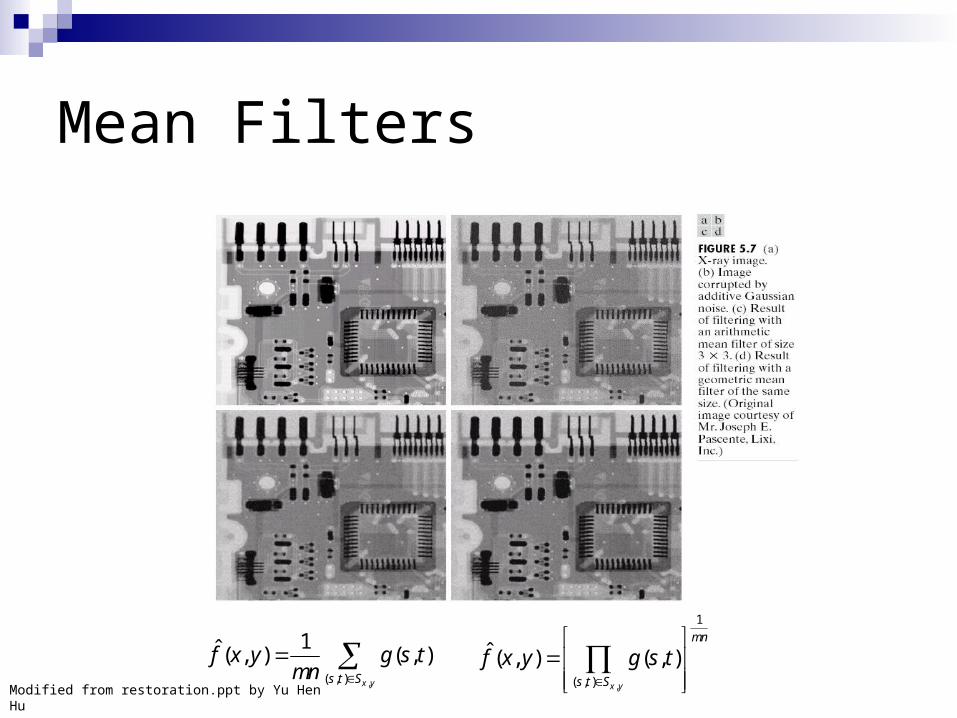
Mean Filters
,( , )
1ˆ( , ) ( , )x ys t S
f x y g s tmn
,
1
( , )
ˆ ( , ) ( , )x y
mn
s t S
f x y g s t
Modified from restoration.ppt by Yu Hen Hu
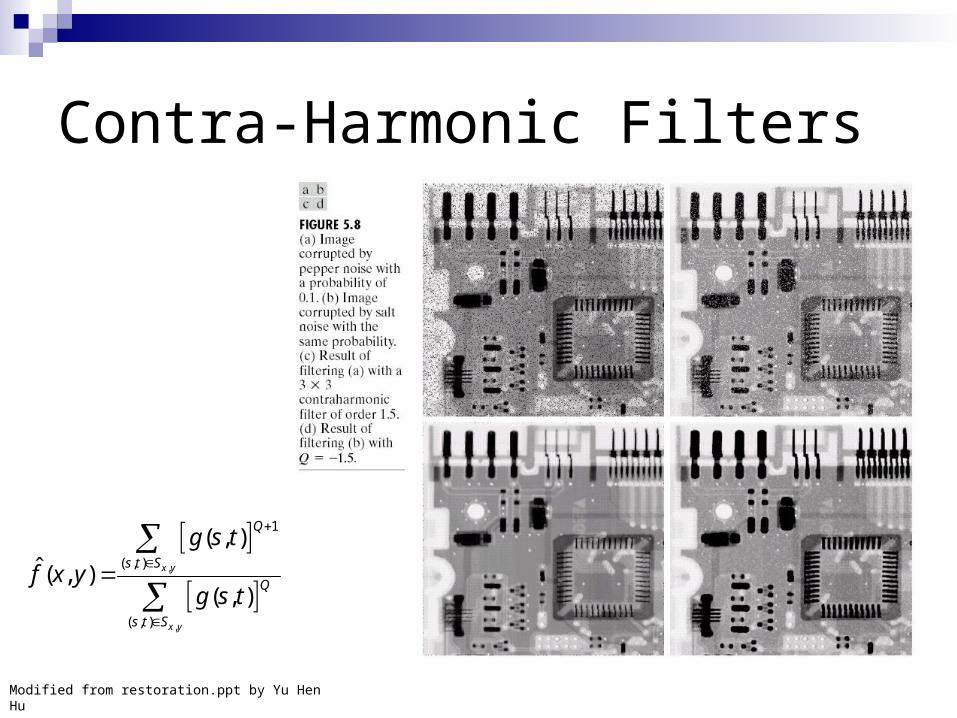
Contra-Harmonic Filters
,
,
1
( , )
( , )
( , )ˆ ( , )
( , )
x y
x y
Q
s t S
Q
s t S
g s t
f x yg s t
Modified from restoration.ppt by Yu Hen Hu
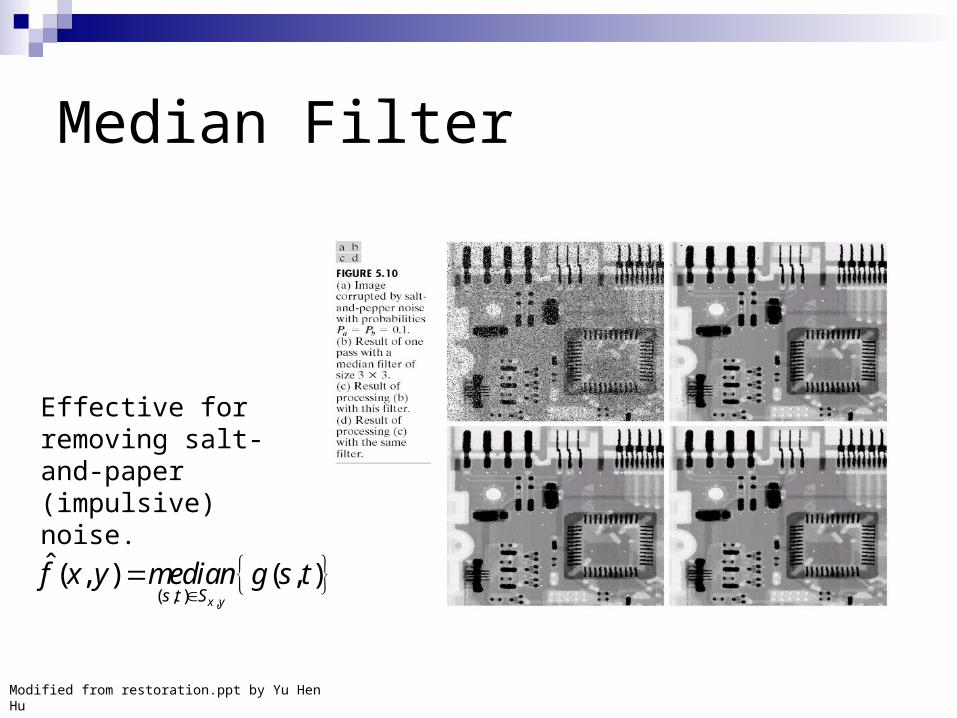
Median Filter
,( , )
ˆ ( , ) ( , )x ys t S
f x y median g s t
Effective for removing salt-and-paper (impulsive) noise.
Modified from restoration.ppt by Yu Hen Hu
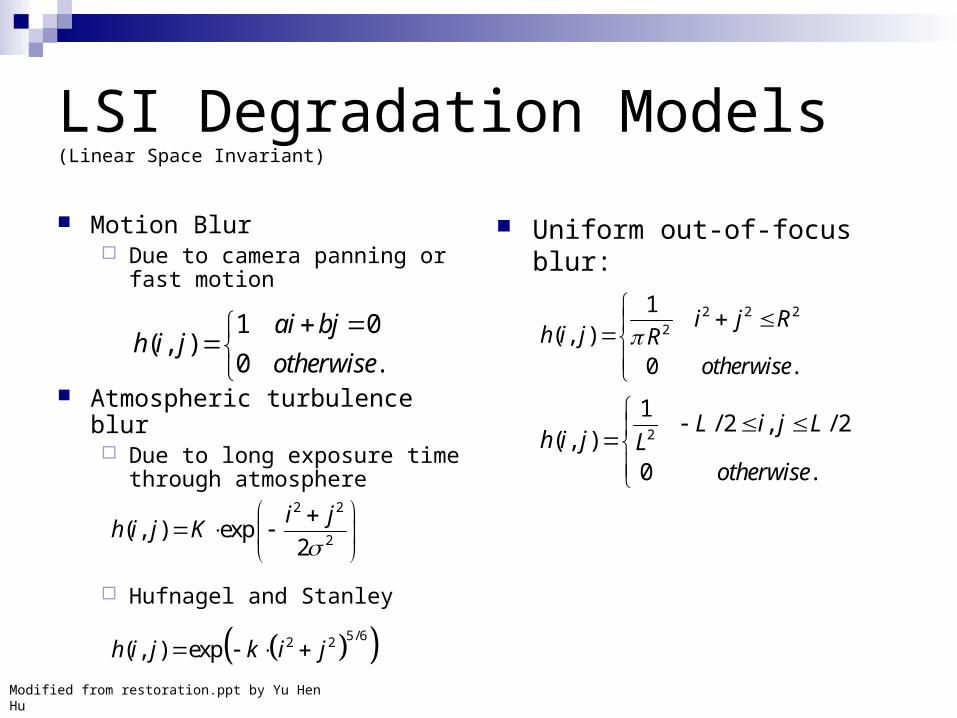
LSI Degradation Models(Linear Space Invariant)
Motion Blur Due to camera panning or fast
motion
Atmospheric turbulence blur Due to long exposure time
through atmosphere
Hufnagel and Stanley
Uniform out-of-focus blur:
1 0( , )
0 .
ai bjh i j
otherwise
2 2
2( , ) exp
2
i jh i j K
2 2 22
1( , )
0 .
i j Rh i j R
otherwise
2
1/ 2 , / 2
( , )0 .
L i j Lh i j L
otherwise
5/62 2( , ) exph i j k i j
Modified from restoration.ppt by Yu Hen Hu
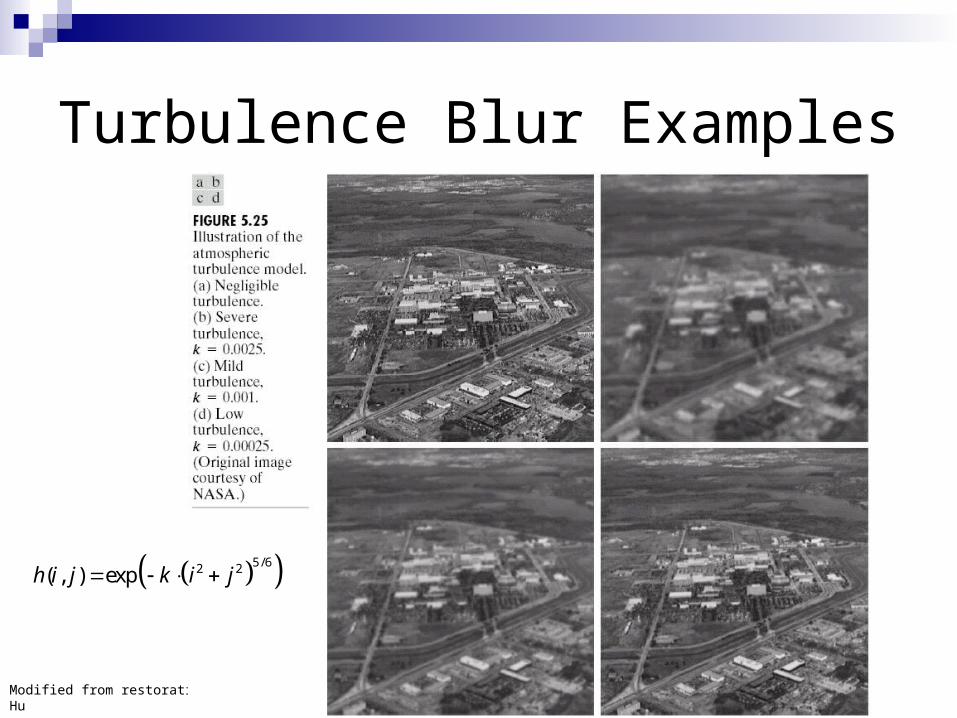
Turbulence Blur Examples
5/ 62 2( , ) exph i j k i j
Modified from restoration.ppt by Yu Hen Hu
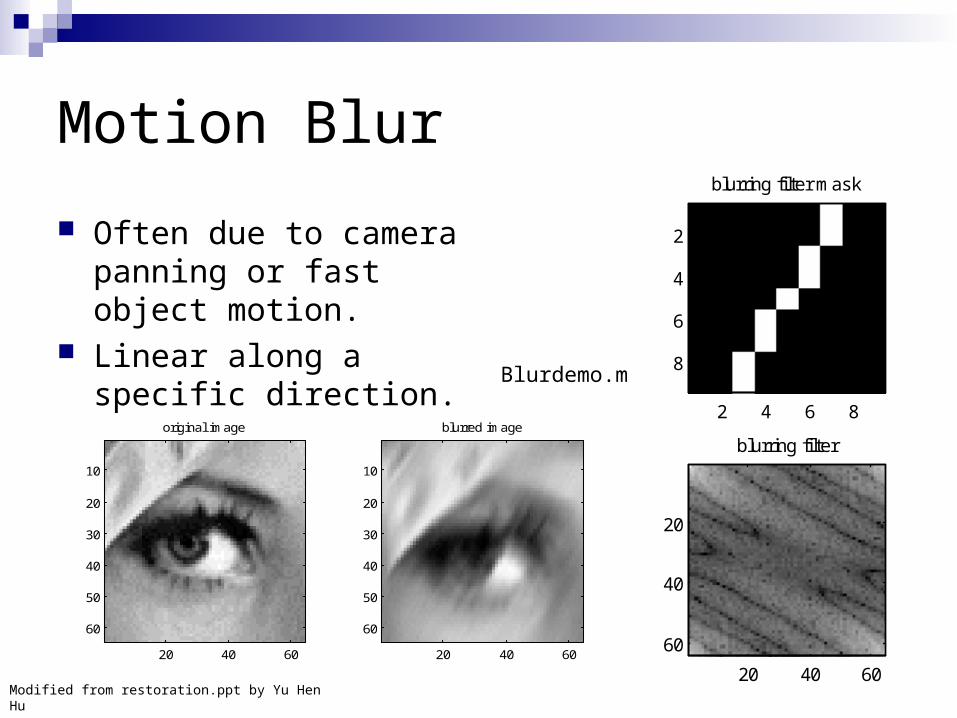
Motion Blur
Often due to camera panning or fast object motion.
Linear along a specific direction.
blurring filter
20 40 60
20
40
60
blurring filter mask
2 4 6 8
2
4
6
8
original image
20 40 60
10
20
30
40
50
60
blurred image
20 40 60
10
20
30
40
50
60
Blurdemo.m

Modified from restoration.ppt by Yu Hen Hu
Inverse Filter
Recall the degradation model:
Given H(u,v), one may directly estimate the original image by
At (u,v) where H(u,v) 0, the noise N(u,v) term will be amplified!
( , ) ( , ) ( , ) ( , )G u v H u v F u v N u v
ˆ ( , ) ( , ) / ( , )
( , )( , )
( , )
F u v G u v H u v
N u vF u v
H u v
original, f
20 40 60
20
40
60
degraded: g
20 40 60
20
40
60
inverse filter
20 40 60
20
40
60
Invfildemo.m
Modified from restoration.ppt by Yu Hen Hu
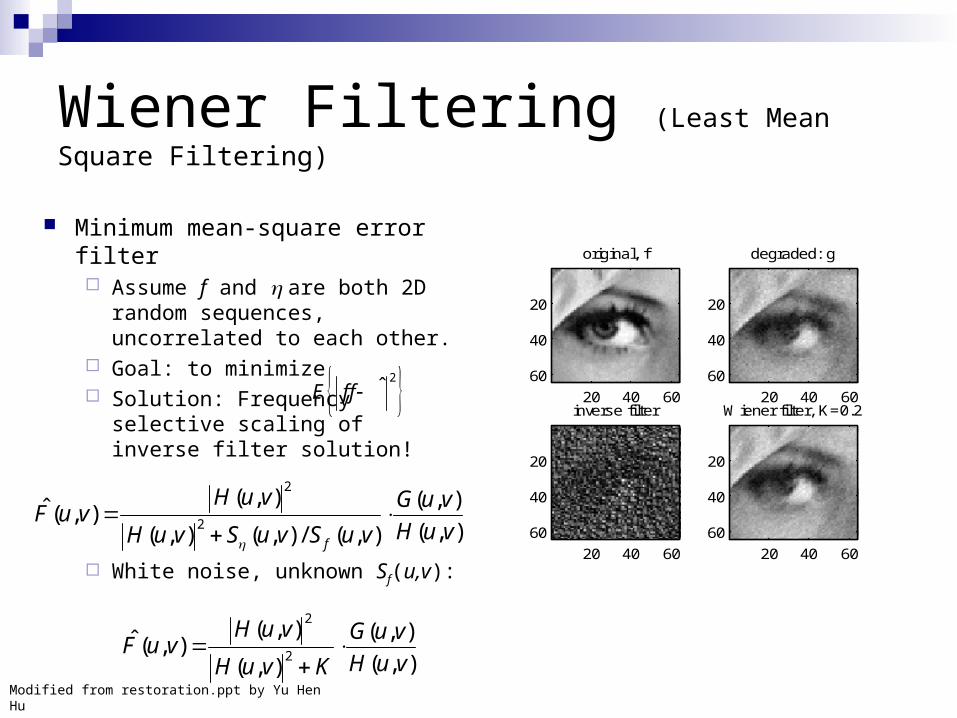
Wiener Filtering (Least Mean Square Filtering)
Minimum mean-square error filter Assume f and are both 2D
random sequences, uncorrelated to each other.
Goal: to minimize Solution: Frequency selective
scaling of inverse filter solution!
White noise, unknown Sf(u,v):
2ˆE f f
2
2
( , ) ( , )ˆ ( , )( , )( , ) ( , ) / ( , )f
H u v G u vF u v
H u vH u v S u v S u v
2
2
( , ) ( , )ˆ ( , )( , )( , )
H u v G u vF u v
H u vH u v K
original, f
20 40 60
20
40
60
degraded: g
20 40 60
20
40
60
Wiener filter, K=0.2
20 40 60
20
40
60
inverse filter
20 40 60
20
40
60
Modified from restoration.ppt by Yu Hen Hu
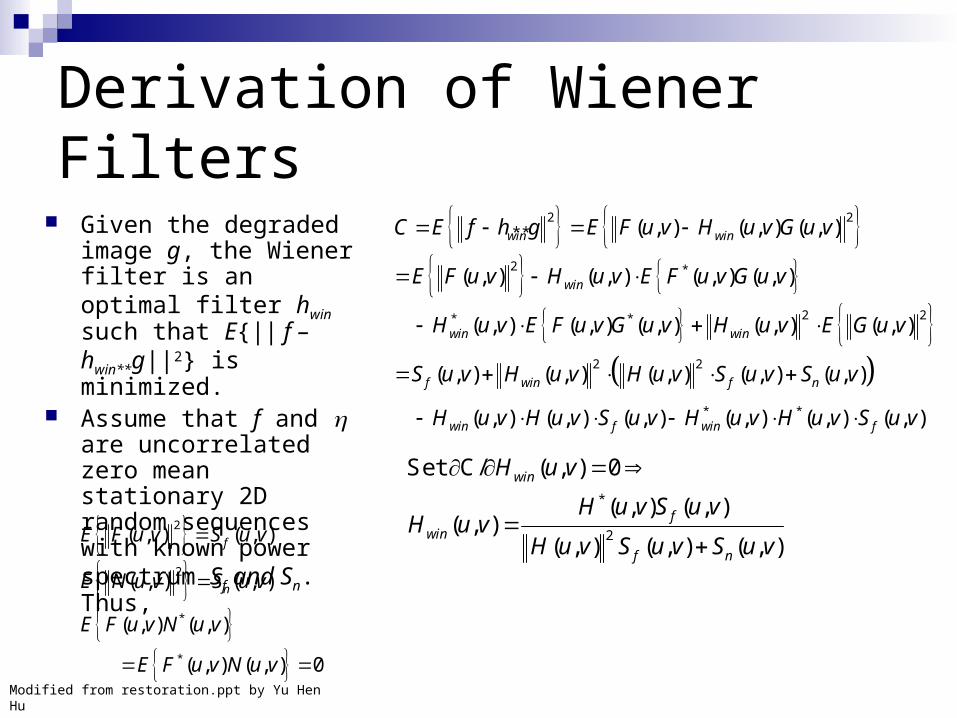
Derivation of Wiener Filters
Given the degraded image g, the Wiener filter is an optimal filter hwin such that E{|| f – hwin**g||2} is minimized.
Assume that f and are uncorrelated zero mean stationary 2D random sequences with known power spectrum Sf and Sn. Thus,
2 2
2 *
2 2* *
2 2
* *
( , ) ( , ) ( , )
( , ) ( , ) ( , ) ( , )
( , ) ( , ) ( , ) ( , ) ( , )
( , ) ( , ) ( , ) ( , ) ( , )
( , ) ( , ) ( , ) ( , ) (
win win
win
win win
f win f n
win f win
C E f h g E F u v H u v G u v
E F u v H u v E F u v G u v
H u v E F u v G u v H u v E G u v
S u v H u v H u v S u v S u v
H u v H u v S u v H u v H u
, ) ( , )fv S u v
2
2
*
*
( , ) ( , )
( , ) ( , )
( , ) ( , )
( , ) ( , ) 0
f
n
E F u v S u v
E N u v S u v
E F u v N u v
E F u v N u v
*
2
( , ) 0
( , ) ( , )( , )
( , ) ( , ) ( , )
Set C/ win
fwin
f n
H u v
H u v S u vH u v
H u v S u v S u v
**
Modified from restoration.ppt by Yu Hen Hu
Constrained Least Square (CLS) Filter
Minimize:
where is an operator that measures the “roughness” (e.g. a second derivative operator)
Subject to constraint:
where
J q m n f m n: || ( , ) ** ( , )|| 2
q m n( , )
|| ( , ) ( , ) ** ( , )||g m n h m n f m n 2 2
2 0

Modified from restoration.ppt by Yu Hen Hu
Solution and Iterative Algorithm
To minimize CCLS, Set
CCLS/ F = 0. This yields
The value of however, has to be determined iteratively! It should be chosen such that
Iterative algorithm (Hunt)1. Set initial value of , 2. Find , and compute
R(u,v).3. If ||R||2 - ||N||2 < - a, set =
BL, increase , else if
||R||2 - ||N||2 > a, set = Bu, decrease , else stop iteration.
4. new = (Bu+BL)/2, go to step 2.
2
2 2
( , ) ( , ) ( , )
( , ) ( , ) ( , )
CLSC G u v H u v F u v
N u v Q u v F u v
*
2 2
( , )ˆ ( , ) ( , )( , ) ( , )
H u vF u v G u v
H u v Q u v
2 2
2 2
ˆ( , ) ( , ) ( , ) ( , )
( , ) ( , )
G u v H u v F u v N u v
R u v N u v a
ˆ ( , )F u v
Modified from restoration.ppt by Yu Hen Hu
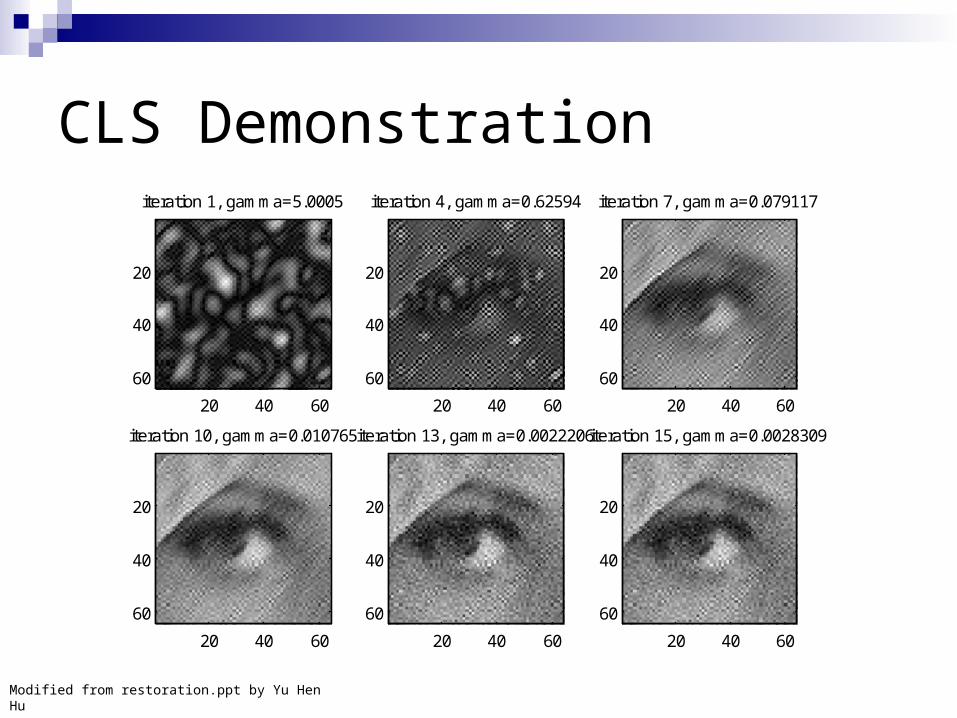
CLS Demonstrationiteration 1, gamma=5.0005
20 40 60
20
40
60
iteration 4, gamma=0.62594
20 40 60
20
40
60
iteration 7, gamma=0.079117
20 40 60
20
40
60
iteration 10, gamma=0.010765
20 40 60
20
40
60
iteration 13, gamma=0.0022206
20 40 60
20
40
60
iteration 15, gamma=0.0028309
20 40 60
20
40
60