industrial robotics reserach activities · pdf filemechatronics, instrumentation &...
TRANSCRIPT

June 2014 | Cerdanyola del Vallès (Barcelona)
Intelligent Systems dept.
Industrial Robotics
Reserach activities background
Daniel Martin

Mechatronics, Instrumentation & Control
INTE
LLIG
ENT
SY
ST
EM
S
2
Industrial Robotics
About ASCAMM’s Intelligent System Department

Mechatronics, Instrumentation & Control
Advanced Sensors
Mechatronics Systems
o Model-based design
o Hardware & Software in the Loop simulation (HIL & SIL)
o Machine design and prototyping
o Embedded Systems
Monitoring and Process Control
3
Industrial Robotics
Advanced modelling & simulation of industrial robots
Robot Calibration
Human-Robot Collaboration (Safety, Interaction, …)
Intelligent System Department - CAPACITIES

4
Further work
Human-Robot Interaction (smart space perception, control,
planning, …)
Intuitive programming
Safety (fenceless, collision avoidance, …)
Force Control applications
Mobile Manipulators
Intelligent System Department – NDUSTRIAL ROBOTICS ROADMAP

5
Intelligent System Department – BACKGROUND
Setup of a ROS & industrial ROS customised Cell
Setup of a Customised ROS based Cell:
• Custom robot modelling
• Inverse Kinematics optimization
• Industrial ROS

6
Intelligent System Department – BACKGROUND
CALIROB1 – Laser Interferometry based Calibration Solution
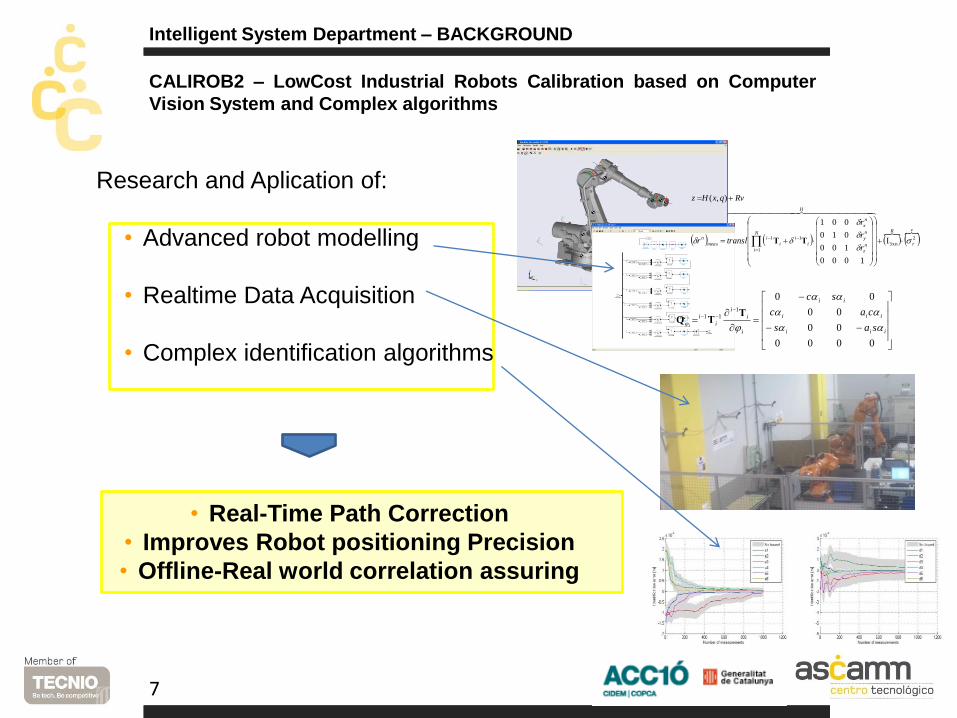
CALIROB2 – LowCost Industrial Robots Calibration based on Computer
Vision System and Complex algorithms
7
Research and Aplication of:
• Advanced robot modelling
• Realtime Data Acquisition
• Complex identification algorithms
• Real-Time Path Correction
• Improves Robot positioning Precision
• Offline-Real world correlation assuring
v
r
R
H
n
z
n
y
n
x
N
i
i
i
i
i
meas
n
r
r
r
translr
RvqxHz
2
3xn
1
11 I
1000
100
010
001
),(
ΤΤ
0000
00
00
001
11
iii
iii
ii
i
i
i
i
i
sas
cac
sc
i
ΤΤQ
Intelligent System Department – BACKGROUND

8
Robot-based CAD-CAM Machining process
Intelligent System Department – BACKGROUND

9
Robot Automated Digitalization of 3D parts
Intelligent System Department – BACKGROUND

10
Real-time robot path correction solution development
Development of an On-line path
correction solution for deburring process:
• Path correction algorithms
• Laser monitoring
• Computer vision
Intelligent System Department – BACKGROUND
11
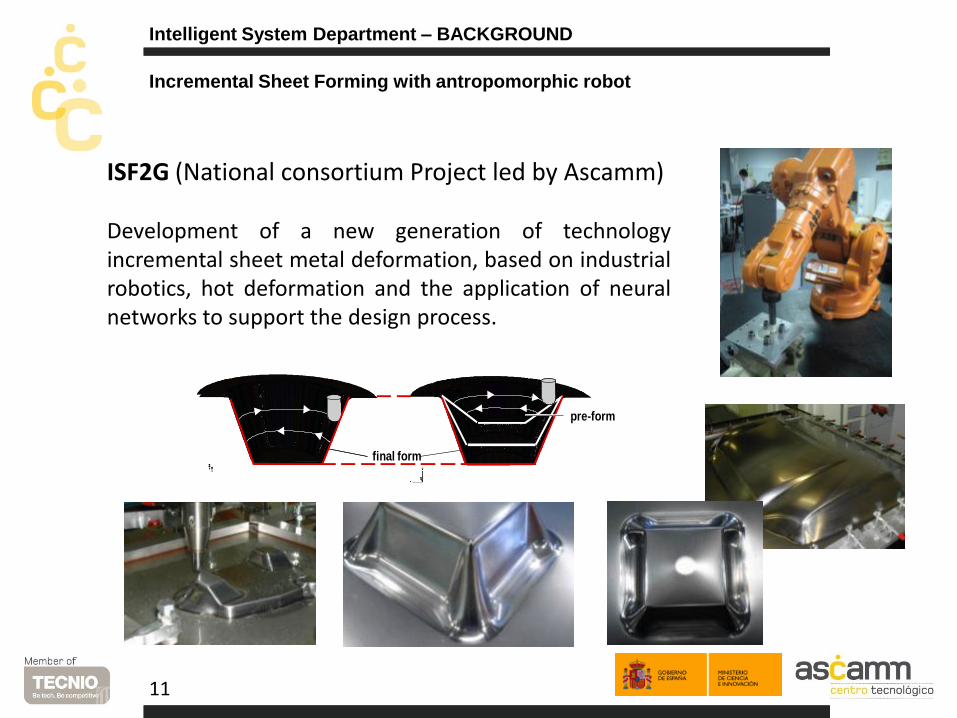
Incremental Sheet Forming with antropomorphic robot
ISF2G (National consortium Project led by Ascamm) Development of a new generation of technology incremental sheet metal deformation, based on industrial robotics, hot deformation and the application of neural networks to support the design process.
pre-form
final form
Intelligent System Department – BACKGROUND

12
Different robotised cells simulation
Intelligent System Department – BACKGROUND

Our Industrial Robotics facilities
13

Daniel Martin ([email protected])
Mechatronics Engineer Ascamm Private Foundation Parc Tecnològic del Vallès Av. Universitat Autònoma 23 08290 Cerdanyola del Vallès (Barcelona)-Spain www.ascamm.com | [email protected]
T +34 935 944 700 | F +34 935 801 102 GPS: +41° 29' 20", +2° 7' 33”
15
THANKS FOR YOUR ATTENTION
Photography: Ilian Bonev.
Intelligent System Department