informe vision artificial
TRANSCRIPT

VISION ARTIFICIAL
Luis David Arias & Mateo Restrepo
Diciembre 2015
Universidad Tecnológica de Pereira
Facultad De Ingenierías
Ing. De Sistemas Y Computación
Técnicas De La Comunicación

2
Prólogo
La visión es algo maravilloso, igual que los otros sentidos, nos permite percibir todos los
colores, formas y relieves que se nos presenten; todo gracias a que poseemos dos ojos con la
capacidad de recibir luz, calcular distancias y enviar impulsos eléctricos a nuestro cerebro
para comprender algo que entendemos como “imagen”. ¿Pero qué sucede con las personas
que no poseen este sentido, o que lo perdieron a través del tiempo? ¿Cuál es la forma de
percibir el mundo para una persona con discapacidad visual? Entre los métodos de
comunicación de una persona invidente están el hablar y el escuchar, pero cuando hablamos
de comunicar información que necesariamente debe ser visual ¿Qué métodos se pueden
utilizar?, Aquí es donde entra la visión artificial, estuvimos analizando los métodos que
presenta esta nueva tecnología, y parecen muy convincentes. En la actualidad existen muchos
programas para esta clase de problemas, puede ser algo tan simple como usar un teclado de
lenguaje braille o un lector de caracteres, pero la visión artificial nos ofrece algo más que
eso, nos ofrece la capacidad de interpretar o reducir imágenes que ningún otro lenguaje ha
podido hacerlo. Espero que este recorrido los motive a ustedes, los futuros ingenieros,
inventores del mañana, para usar esta tecnología, la cual está ahí esperando evolucionar para
cambiar la vida de las personas que más lo necesitan.

CONTENIDO
INTRODUCCIÓN ............................................................................................................................. 6
CAPITULO I ..................................................................................................................................... 8
EMPEZANDO A TRABAJAR CON VISION ARTIFICIAL ...................................................... 8
1. Sistema de visión artificial ........................................................................................................ 8
1.1 Núcleo del sistema de visión artificial ...................................................................................... 10
1.1.A Segmentación: ........................................................................................................................ 10
1.1.B Representación y descripción .............................................................................................. 10
1.1.C Clasificación ........................................................................................................................... 10
1.2 Interpretación ............................................................................................................................ 11
CAPITULO II .................................................................................................................................. 12
INTERFERENCIAS DE TRABAJO ............................................................................................ 12
2. Interferencias técnicas y de optimización ............................................................................. 12
2.1 RUIDOS TÉCNICOS .............................................................................................................. 12
2.1.A Salt and pepper ...................................................................................................................... 12
2.1.B Ruido uniforme ...................................................................................................................... 13
2.1.C Ruido Gaussiano .................................................................................................................... 13
2.2 Interferencias debidas al contexto ........................................................................................... 14
2.2.A Punto de vista ......................................................................................................................... 14
2.2.B Oclusión .................................................................................................................................. 14
2.2.C Escala ...................................................................................................................................... 15
2.2.D Deformación ........................................................................................................................... 15
2.2.E Fondo desordenado................................................................................................................ 16
2.2.F Variaciones dentro de una misma clase ............................................................................... 16
CAPITULO III ................................................................................................................................ 17
APLICACIONES ACTUALES DE LA VISION ARTIFICIAL ................................................ 17
3.1 Aplicaciones industriales de la visión artificial ................................................................. 17
3.1.1 Metrología óptica 2D y 3D .............................................................................................. 17
3.1.2 Orientación y posicionamiento de objetos ..................................................................... 18
3.2 Aplicaciones biomédicas de la visión artificial .................................................................. 18
3.2.1 La visión artificial en la biología .................................................................................... 18
3.2.2 La visión artificial en la medicina .................................................................................. 19
4
3.3 Aplicaciones de biométrica para seguridad ...................................................................... 20
3.3.1 Huellas dactilares ............................................................................................................ 20
3.2.2 Detección de caras ........................................................................................................... 21
CAPITULO IV ................................................................................................................................ 23
EL OJO BIONICO ......................................................................................................................... 23
CONCLUSIONES ........................................................................................................................... 25
BIBLIOGRAFIA ............................................................................................................................. 26

5
INDICE DE FIGURAS
Ilustración 1. Procesos de la visión artificial ....................................................................................... 8
Ilustración 2. Sistema de visión artificial ............................................................................................ 9
Ilustración 3. Salt and pepper ............................................................................................................ 12
Ilustración 4. Ruido Uniforme .......................................................................................................... 13
Ilustración 5. Ruido Gaussiano ......................................................................................................... 13
Ilustración 6. Punto de vista .............................................................................................................. 14
Ilustración 7.. Oclusión ..................................................................................................................... 14
Ilustración 8 Escala ........................................................................................................................... 15
Ilustración 9 Deformación ................................................................................................................. 15
Ilustración 10 Fondo Desordenado ................................................................................................... 16
Ilustración 11 Variaciones dentro de una misma clase ..................................................................... 16
Ilustración 12. Metrología óptica 2D y 3D ....................................................................................... 17
Ilustración 13. Radiografía ................................................................................................................ 19
Ilustración 14. Huella Dactilar .......................................................................................................... 20
Ilustración 15 Detección de Caras ..................................................................................................... 21
Ilustración 16 Argus II ...................................................................................................................... 23
Ilustración 17 Vision con Argus II .................................................................................................... 24
6
INTRODUCCIÓN
“Utilizarías los ojos como nunca hasta entonces. Todo lo que siente se convertiría en algo
querido para ti. Tus ojos tocarían y abrazarían cada objeto que entrase en el radio de tu visión.
Y luego, por fin, verías y un nuevo mundo de belleza se abriría ante ti”- Helen Keller.
Lo que es claro, es que la visión artificial cambiará muchas vidas, pero primero, necesita ser
mejorada por nosotros, por eso este documento es un abrebocas a lo que podríamos llegar a
hacer con esta tecnología, no vamos a explicarles cómo hacerlo, pero si como lo han hecho
otros investigadores como usted y yo, que han empezado a realizar, pero que no han podido
completar, ahí están, esperando que lleguemos a construir el mañana y lo que será de esas
personas que lo conformaran.
En el mundo hay 314 millones de personas con discapacidad visual y Colombia posee un
total de 1.143.992 casos de personas con este problema, representando el 43.5% del total de
discapacitados del país.1 Parece ser un porcentaje alto para la gran cantidad de discapacitados
en Colombia, y que el estado invierte más en hacer estas estadísticas que destinar fondos a la
investigación.
Antes de poder entrar en el fabuloso mundo de la visión artificial, es importante conocer
cómo funciona la visión humana; el ojo humano es como una cámara fotográfica (de hecho
se tomó como referencia para ser inventada) está compuesto por un globo ocular el cual es
protegido por las cejas, las pestañas, los parpados y las glándulas lacrimales las cuales
mantienen húmeda la superficie; Este globo está compuesto por el iris que puede ser de varios
colores y la pupila que se abre y se cierra (como el diafragma de una cámara fotográfica) para
regular la cantidad de luz que entrará; Cuando la luz entra por la pupila, primero debe pasar
por una capa transparente y elástica llamado cristalino (como el lente de una cámara) la cual
refractara los rayos de luz hacia la membrana más interna del ojo, la retina, esta membrana
es la continuación del nervio óptico, la cual transmitirá la información al cerebro en forma
de impulsos eléctricos, gracias a unas células foto receptoras llamadas bastones y conos, los
bastones perciben la intensidad de la luz, y los fotones, perciben los colores (específicamente
rojo, verde y azul); Desde aquí empezamos a notar de que la manera en que trabaja la
información una cámara fotográfica es muy parecida a la del ojo humano, el lente, el
diafragma, el sensor, los colores RGB, la tecnología de estos instrumentos ha avanzado
demasiado, pero ¿Acaso una cámara fotográfica sabe que está fotografiando?, algunas
personas creerán que si por el simple hecho de encontrar alguna función en su cámara digital
que diga “Detección de rostros” o “Enfoque Automático”, estas funciones podrían tomarse
como ejemplo de lo que es la visión artificial, pero el asunto va más allá que detectar un
1 Colombia tiene 1,14 millones de personas con problemas visuales, ElPais.com.co
7
simple cambio de pixeles (no digo que todas las cámaras funcionen de esta manera), la verdad
es que aún falta mucho más por descubrir de este campo.
La visión artificial también conocida como visión por computador es una disciplina
científica, que utiliza diferentes métodos para adquirir, procesar, realizar un análisis y
comprender las imágenes del mundo real, generando información numérica o simbólica que
puedan ser entendidas por un computador.2 Así como los seres humanos usamos nuestros
ojos para tener una percepción del mundo real esto mismo trata de realizar la visión artificial
producir el mismo efecto para que las computadoras puedan percibir y entender una imagen
o una secuencia de imágenes. Esta comprensión se produce gracias a diferentes campos como
la geometría, la estadística, la física entre otras disciplinas que se aplican. La adquisición de
los datos se consigue por diferentes medios como secuencias de imágenes, vistas desde
diferentes cámaras de video o datos multidimensionales desde un escáner médico. La visión
artificial también la podemos ver como una rama de la inteligencia artificial la cual busca
modelar matemáticamente el proceso de percepción visual que poseemos los seres humanos
y se encarga de generar software que permite simular estas capacidades visuales desde una
computadora.
Otro ejemplo de visión artificial un poco más avanzado se presenta cuando subimos la típica
foto con los amigos a Facebook, y de repente vas a etiquetar a alguien y resulta que esta red
social ya sabía quién era esa persona, o cuando te piden las huellas dactilares para registrarte
en algún sitio, son algunas de las aplicaciones que veremos más adelante, por ahora,
disfrutemos de este recorrido de aprendizaje.
2 Definición Visión Artificial, Wikipedia

8
CAPITULO I
EMPEZANDO A TRABAJAR CON VISION ARTIFICIAL
1. Sistema de visión artificial
Ya teniendo definido lo que es visión artificial tenemos que entender cuáles son los
pasos necesarios para trabajar con esta tecnología, porque no es solo convertir una
imagen a matrices inteligentes, sino que la imagen debe pasar por un proceso de
limpieza, para luego detectar sus componentes e interpretarlos (ver Ilustración 1).
Ilustración 1. Procesos de la visión artificial
Debemos tener en cuenta que cuando trabajamos con imágenes tomadas del exterior,
estas representan un mundo real, y no ideal, por lo cual vamos a encontrar muchas
interferencias que debemos solucionar mediante otros métodos, la idea es que cuando
se vaya a procesar la imagen para su reconocimiento, esta tenga una excelente calidad,
de lo contrario podrían encontrarse muchas fallas.
En el siguiente proceso, como lo dice la Ilustración 1, debemos aplicar unas técnicas
del procesamiento de imágenes para identificar los elementos que necesitamos y
llevarlos hasta su interpretación, por ejemplo: “Necesitamos que nuestra cámara de
seguridad del museo, detecte cuando alguien intenta robar alguna de las obras”, una
solución a esto se implementaría detectando los 3 estados de la escena: el estado
normal de la obra, la interferencia del sujeto, y finalmente la irregularidad de la
continuidad en la escena (la obra ya no se encuentra).
Por último, tenemos la interpretación de los datos, expresados en un lenguaje que ya
comprende el computador para poder reaccionar a la información, tomando el
9
ejemplo anterior: “Nuestro sistema detectó que la obra identificada ya no se
encuentra”, lo más común es que se dispare una alarma, se cierren las salidas y se les
comunique al personal de seguridad para que emprendan la búsqueda del ladrón, todo
esto digno de una película de agentes.
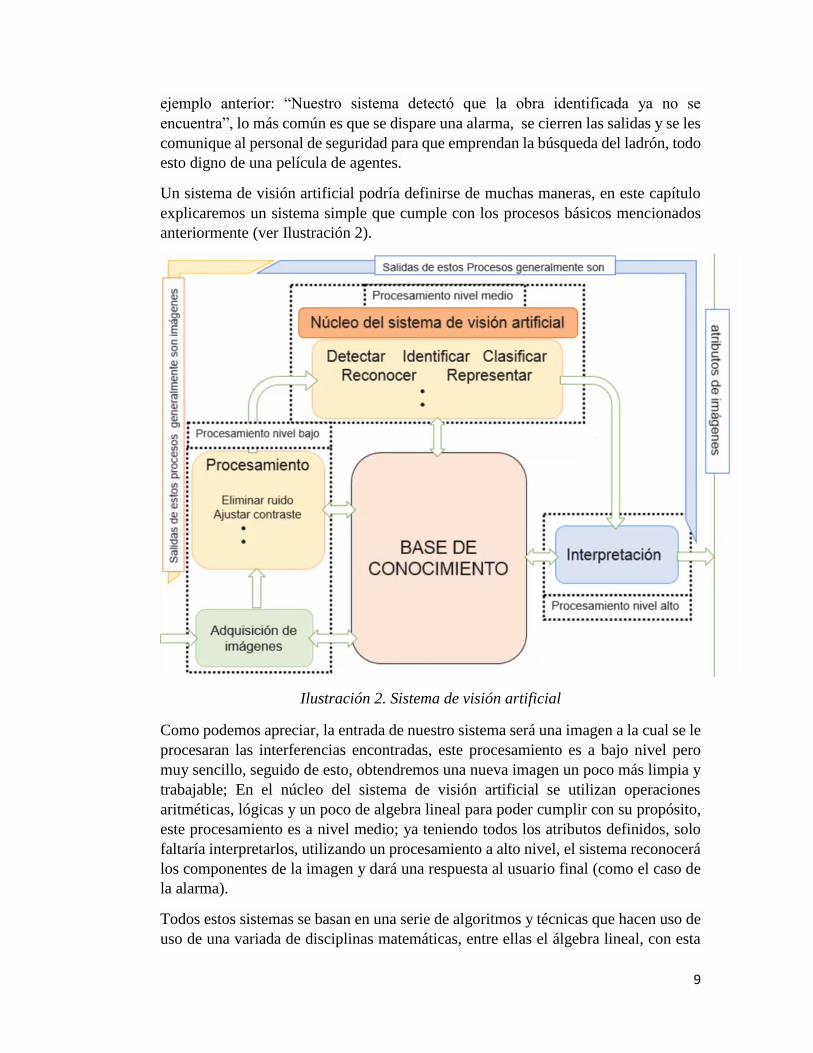
Un sistema de visión artificial podría definirse de muchas maneras, en este capítulo
explicaremos un sistema simple que cumple con los procesos básicos mencionados
anteriormente (ver Ilustración 2).
Ilustración 2. Sistema de visión artificial
Como podemos apreciar, la entrada de nuestro sistema será una imagen a la cual se le
procesaran las interferencias encontradas, este procesamiento es a bajo nivel pero
muy sencillo, seguido de esto, obtendremos una nueva imagen un poco más limpia y
trabajable; En el núcleo del sistema de visión artificial se utilizan operaciones
aritméticas, lógicas y un poco de algebra lineal para poder cumplir con su propósito,
este procesamiento es a nivel medio; ya teniendo todos los atributos definidos, solo
faltaría interpretarlos, utilizando un procesamiento a alto nivel, el sistema reconocerá
los componentes de la imagen y dará una respuesta al usuario final (como el caso de
la alarma).
Todos estos sistemas se basan en una serie de algoritmos y técnicas que hacen uso de
uso de una variada de disciplinas matemáticas, entre ellas el álgebra lineal, con esta
10
disciplina, se pueden comprender las proyecciones del mundo real tridimensional en
imágenes bidimensionales, o inversamente, se puede utilizar la referencia
bidimensional para determinar la posición de un objeto 3D.
En algunos casos, las detecciones se consiguen mediante modelos de apariencia que
utilizan los histogramas de color3 de las imágenes, con modelos previamente
almacenados.
Los algoritmos dentro del núcleo del sistema de visión artificial varían según el
destino del software, ya que los algoritmos pueden enfocarse en la detección de
ciertos objetos, obtener la ubicación exacta según la perspectiva o proyectar un
escenario tridimensional según la reunión de otras imágenes.
1.1 Núcleo del sistema de visión artificial
Uno de los conceptos más complejos de entender se encuentran en esta fase de
la visión artificial, ¿Cómo sabemos que lógica utilizar después de limpiar una
imagen? No te vamos a decir el cómo hacerlo, pero si unos cuantos procesos que
debes tener en cuenta para formar tu núcleo de procesamiento.
1.1.A Segmentación:
En esta fase se debe dividir la imagen en partes u objetos que la constituyen,
tenemos que diferenciar lo que es un fondo y el objeto que necesitamos
analizar, para eso se utiliza la información previamente almacenada de los
histogramas de colores que se explicaron anteriormente; pero no solo se trata
de la distribución del color, también se puede segmentar la imagen según el
movimiento, regiones que sabemos que es el fondo, umbralización4 .
1.1.B Representación y descripción
En esta fase se etiquetan los objetos teniendo en cuenta la información
suministrada por la inspección de dicho objeto, la cual puede ser cuantitativa
o cualitativa, en la inspección cualitativa tenemos en cuenta las medidas del
objeto y sus ángulos de orientación, mientras que en la inspección cualitativa,
nos basamos en su color y textura.
1.1.C Clasificación
Esta fase consiste en reconocer los objetos de la escena a partir de las
características extraídas, estas características pueden estar representadas en
vectores o estructuras de datos definidas, además se debe identificar como
3 Histograma de color: En los campos de procesamiento de imagen y fotografía, un histograma de color es una representación anterior de la distribución de color en una imagen. https://es.wikipedia.org/wiki/Histograma_de_color 4 La umbralización tiene como objetivo convertir una imagen de escala de grises a una nueva con solo dos niveles (blanco y negro, true and false, 0 y 1)
11
están relacionados en la imagen (Ej, el vaso está sobre la mesa, el cuadro se
encuentra en la pared), mediante algunos métodos como redes neuronales,
sistemas expertos, fuzzy logic, entre otros.
1.2 Interpretación
Este proceso depende del propósito del sistema de visión artificial, en esta
toma de decisiones normalmente se controlan aparatos mecánicos que
efectúan la manipulación de productos después de ser clasificados.
Teniendo claro cuáles son los procesos que conforman un sistema de visión artificial, estamos
listos para empezar a construir uno, cabe resaltar que el lenguaje de programación para
desarrollar estos sistemas es independiente de la lógica que vayamos a aplicar (como todos
los programas) uno de los lenguajes más utilizados para este tipo de software es MATLAB5,
pero es decisión del desarrollador elegir el framework más adecuado y cómodo para su
trabajo.
En el siguiente capítulo nos enfocaremos en los problemas que se pueden presentar al trabajar
con imágenes tomadas del mundo real.
5 MATLAB descarga http://www.mathworks.com/products/matlab/
CAPITULO II
INTERFERENCIAS DE TRABAJO
2. Interferencias técnicas y de optimización
En el momento de aplicar los conceptos teóricos de la visión artificial encontrar
diferentes interferencias y problemas relacionados con el mundo que nos rodea. Esto
se presenta por el hecho de que nuestro mundo no es perfecto y los elementos que se
usan para la captura de imágenes tampoco lo son. Teniendo en cuenta estos problemas
se encuentran los siguientes tipos de ruidos:
2.1 RUIDOS TÉCNICOS
Esta clase de ruidos son ocasionados por el procesamiento digital de nuestros
dispositivos de captura, ya que estos no son tan avanzados como el ojo humano,
basta con tomar una fotografía de noche con nuestros teléfonos para encontrar
esta clase de ruidos.
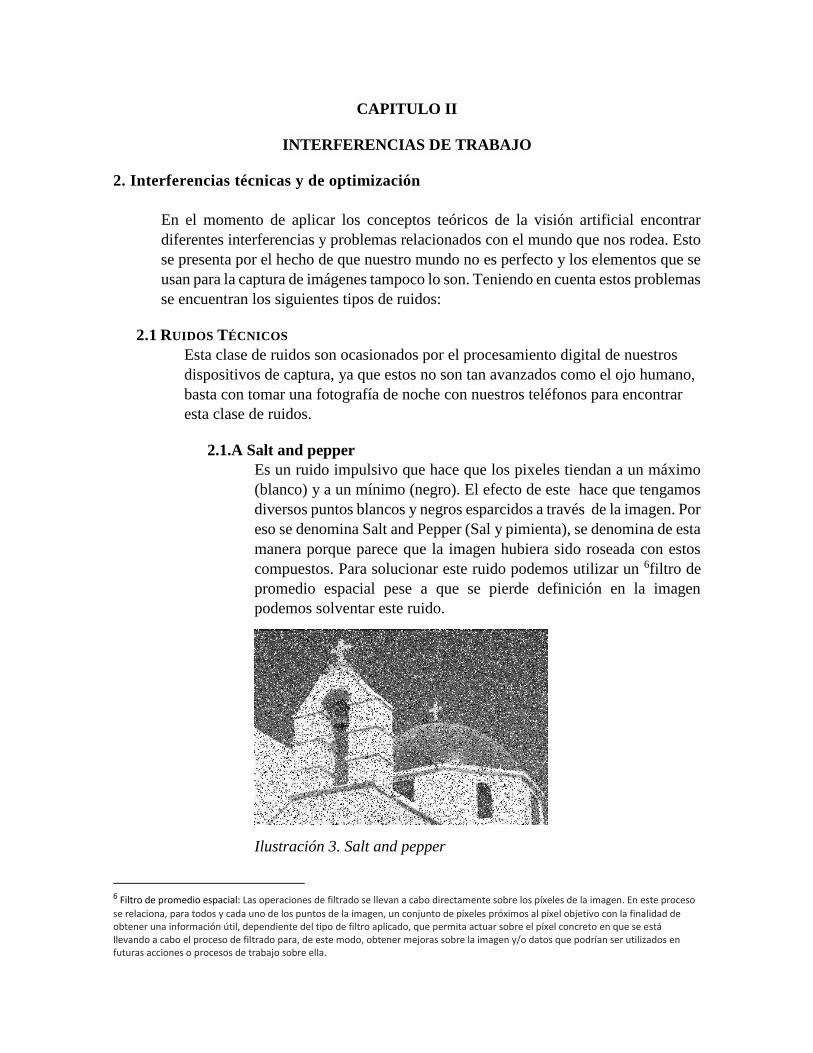
2.1.A Salt and pepper
Es un ruido impulsivo que hace que los pixeles tiendan a un máximo
(blanco) y a un mínimo (negro). El efecto de este hace que tengamos
diversos puntos blancos y negros esparcidos a través de la imagen. Por
eso se denomina Salt and Pepper (Sal y pimienta), se denomina de esta
manera porque parece que la imagen hubiera sido roseada con estos
compuestos. Para solucionar este ruido podemos utilizar un 6filtro de
promedio espacial pese a que se pierde definición en la imagen
podemos solventar este ruido.
Ilustración 3. Salt and pepper
6 Filtro de promedio espacial: Las operaciones de filtrado se llevan a cabo directamente sobre los píxeles de la imagen. En este proceso
se relaciona, para todos y cada uno de los puntos de la imagen, un conjunto de píxeles próximos al píxel objetivo con la finalidad de obtener una información útil, dependiente del tipo de filtro aplicado, que permita actuar sobre el píxel concreto en que se está llevando a cabo el proceso de filtrado para, de este modo, obtener mejoras sobre la imagen y/o datos que podrían ser utilizados en futuras acciones o procesos de trabajo sobre ella.

13
2.1.B Ruido uniforme
Es un ruido que afecta la imagen teniendo blanco y negro de manera
uniforme sobre ella. El efecto que presenciamos a simple vista de este
es que percibimos interferencias en la imagen, como si esta se
encontrara codificada. Observamos una pantalla por encima de la
imagen llena de pixeles con valores aleatorios y expandidos
uniformemente, este ruido puede aparecer cuando se realiza el proceso
de cuantificación de una imagen.
Ilustración 4. Ruido Uniforme
2.1.C Ruido Gaussiano
Es un ruido que se deriva de los equipos de captura. El efecto en la
imagen parecerá al uniforme solo que los valores no son tan fuertes,
tienden más a ser grises que negros y blancos. Para solucionar este
problema podemos utilizar un filtro de promedio espacial con
coeficientes Gaussianos.
Ilustración 5. Ruido Gaussiano

14
2.2 Interferencias debidas al contexto
Este tipo de interferencias están más basadas en problemas del mundo real que en
problemas técnicos, pues ya dependen del dispositivo con el que se tomó la foto, y
al escenario que se está fotografiando.
2.2.A Punto de vista
Según como se encuentra la imagen orientada al observador. Un ejemplo claro
de esto es: Un animal no se ve igual de frente que de espaldas, aunque éste
sigue siendo un animal.
Iluminación: La cantidad de luz que recibe el objeto. Un objeto deberá ser
distinguible independientemente de si tiene alguna cara oscura debido a la
iluminación.
Ilustración 6. Punto de vista
2.2.B Oclusión
Un objeto puede estar en segundo plano, es decir, que otro objeto tape
parcialmente nuestro objetivo a la hora de extraerlo o analizarlo. Deberemos
ser capaces de saber interpretar que un objeto diferente está entre nuestro
objeto a extraer y el observador.
Ilustración 7.. Oclusión
15
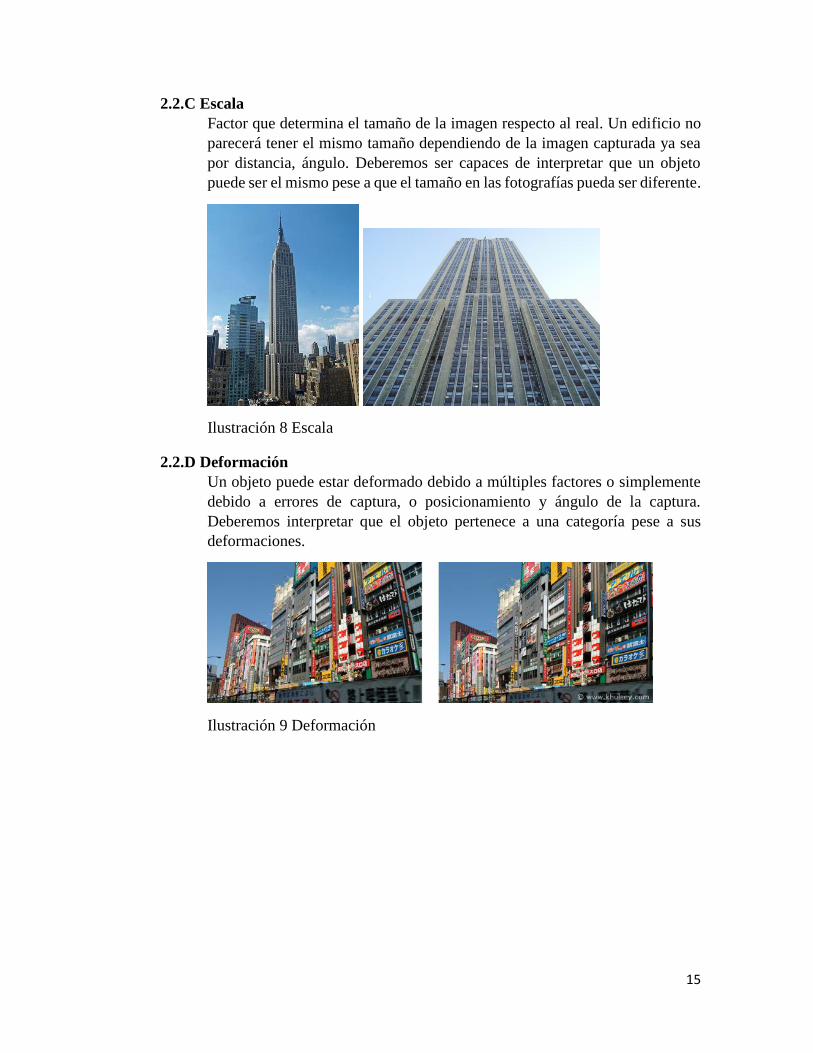
2.2.C Escala
Factor que determina el tamaño de la imagen respecto al real. Un edificio no
parecerá tener el mismo tamaño dependiendo de la imagen capturada ya sea
por distancia, ángulo. Deberemos ser capaces de interpretar que un objeto
puede ser el mismo pese a que el tamaño en las fotografías pueda ser diferente.
Ilustración 8 Escala
2.2.D Deformación
Un objeto puede estar deformado debido a múltiples factores o simplemente
debido a errores de captura, o posicionamiento y ángulo de la captura.
Deberemos interpretar que el objeto pertenece a una categoría pese a sus
deformaciones.
Ilustración 9 Deformación
16
2.2.E Fondo desordenado
Un objeto puede estar en un contexto desordenado y caótico. Como por
ejemplo un mosaico. Deberemos saber distinguir el objeto entre el caos que le
envuelve.
Ilustración 10 Fondo Desordenado
2.2.F Variaciones dentro de una misma clase
Cierto tipo de objeto puede ser muy diferente a otro de su misma categoría,
Tenemos el ejemplo de cuando observamos una silla, que hay multitud de
sillas diferentes pero a todas les unen los mismos rasgos característicos: 4
patas, una placa donde sentarse, un reposo para la espalda.
Ilustración 11 Variaciones dentro de una misma clase
Depende de la manera que solucionemos estos problemas, que tipo de algoritmos o procesos
se apliquen, nuestro programa puede ser más o menos eficiente y fiable.
17
CAPITULO III
APLICACIONES ACTUALES DE LA VISION ARTIFICIAL
3.1 Aplicaciones industriales de la visión artificial
En la industria, como campo general de desarrollo, el reconocimiento de imágenes
está íntimamente ligado a un sistema de procesamiento que ofrezca una alta calidad
y seguridad en su utilización practica como es la Inteligencia Artificial.
Aunque la Inteligencia Artificial aun es un frente cambiante y en continuo desarrollo,
las bases de la visión artificial como parte de un sistema de IA han sido fuertemente
apoyadas por este sector, por el aprovechamiento de recursos que ello supone.
A continuación se exponen ejemplos de la visión artificial aplicadas en la industria, a
nivel de herramientas de trabajo y de productos finales de venta al usuario.
La inspección de productos industriales, el guiado de robots o el control del tráfico
son sólo algunas de las aplicaciones de los sistemas de visión artificial pero existen
otros más innovadores y de los que se tiene menos conocimiento.
3.1.1 Metrología óptica 2D y 3D
Diseño de sistemas industriales de visión artificial para control metrológico
en 2 y 3 dimensiones con el fin de detectar desviaciones respecto a las medidas
reales.
En el área de la metrología,
los sistemas de visión
artificial tratan de obtener
las magnitudes físicas del
objeto y verificar
posteriormente que se
corresponden con el patrón
exigido. Para ello se
desarrolla un software
capaz de detectar estos
aspectos y establecer si se
cumplen o no los
diferentes requisitos. Entre
las principales ventajas de
este sistema se encuentra
que no es necesario el contacto
con el objeto y la posibilidad de
realizar el control en el cien por cien de las piezas fabricadas. La visión
artificial permite verificar dimensiones de piezas industriales con precisión.
Ilustración 12. Metrología óptica 2D y
3D

18
La visión artificial puede alcanzar una precisión por debajo de la centésima de
milímetro, lo que le hace ser un sistema atractivo para su implantación en
industrias como la del automóvil.
Eusebio de la Fuente, del Departamento de Ingeniería de Sistemas y
Automática de la Universidad de Valladolid, asegura que la visión artificial
posibilita el control de distancias, el número de estrías, radios o ángulos de
una pieza industrial con gran precisión, ya que la medición se basa en sus
características geométricas como son las rectas o los círculos.
3.1.2 Orientación y posicionamiento de objetos
Diseño e implementación de sistemas de visión artificial para verificar la
posición y orientación de elementos dentro de cintas de transportes para su
manipulación posterior. Diseño de sistemas "pick and place" para
manipulación automatizada de productos en líneas de producción.
Recuento de productos en procesos complejos y de alta velocidad
Diseño e implementación de sistemas de visión artificial para conteo de
productos en transportes, estáticos... por ejemplo para empaquetado de
productos automatizado.
Control de calidad en procesos de producción
Detección de defectos en productos; aspecto, tamaño, longitud
Diseño e implementación de sistemas de visión artificial para control
dimensional (tamaño, longitud) y estético (defectos físicos) aplicado al control
de calidad de productos manufacturados en general tanto a nivel industrial
(piezas de automóviles, salpicaderos, lunas de coche, ladrillos, baldosas)
como de consumo.
3.2 Aplicaciones biomédicas de la visión artificial
3.2.1 La visión artificial en la biología
En el campo de la biología hay que distinguir entre dos tipos de aplicaciones
de visión artificial, aplicaciones microscópicas y macroscópicas.
Para aplicaciones microscópicas la estrategia a seguir es, mediante técnicas de
segmentación orientadas a regiones, la identificación de diferentes
propiedades de las células (color, forma, tamaño, etc) o bien, para contar el
número de microorganismos o células presentes en una muestra de la que se
ha obtenido una imagen.
En cuanto a las aplicaciones macroscópicas de lo que se trata es de la
identificación de determinados tipos de texturas en vegetales, o características
19
de diferentes áreas naturales por rasgos característicos, como color, grado de
floración o crecimiento de especies por diferencia de imágenes por ejemplo.
En concreto este último método también se emplea en la geología para detectar
movimientos de regiones.
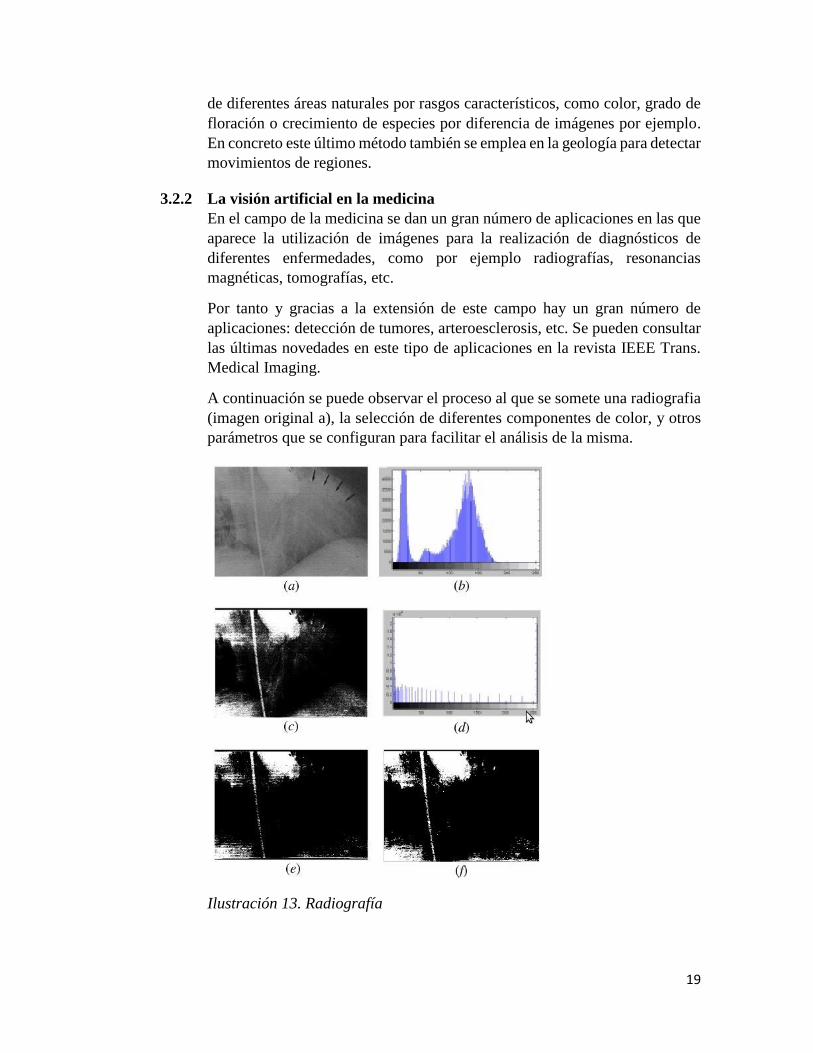
3.2.2 La visión artificial en la medicina
En el campo de la medicina se dan un gran número de aplicaciones en las que
aparece la utilización de imágenes para la realización de diagnósticos de
diferentes enfermedades, como por ejemplo radiografías, resonancias
magnéticas, tomografías, etc.
Por tanto y gracias a la extensión de este campo hay un gran número de
aplicaciones: detección de tumores, arteroesclerosis, etc. Se pueden consultar
las últimas novedades en este tipo de aplicaciones en la revista IEEE Trans.
Medical Imaging.
A continuación se puede observar el proceso al que se somete una radiografia
(imagen original a), la selección de diferentes componentes de color, y otros
parámetros que se configuran para facilitar el análisis de la misma.
Ilustración 13. Radiografía

20
3.3 Aplicaciones de biométrica para seguridad
Otras aplicaciones no médicas de la visión artificial aplicada a la biomedicina es por
ejemplo la utilización de imágenes de huellas dactilares, caras o imágenes de retinas.
Para aplicar la biometría a la identificación de individuos deben cumplirse una serie
de requisitos: Permanencia. El rasgo a medir no debe cambiar en el tiempo (salvo
enfermedad).
Unicidad. El patrón debe tener una probabilidad muy baja de coincidir con el de otro
sujeto.
Universalidad. Toda persona debe tener dicha característica a observar.
3.3.1 Huellas dactilares
Para la identificación por medio de huellas
dactilares la estrategia a seguir es la observación de
puntos singulares, para que cumplan los requisitos
explicados en el apartado anterior.
Los puntos con mayor concentración de puntos
singulares (80%) se encuentran cuando se termina
una línea y donde se bifurca una línea. A estos
puntos se les llama minucias. Después a cada
minucia se le atribuye una posición y una
orientación. El proceso de obtención de las
minucias recibe el nombre de filtrado.
Una vez filtrada una huella para buscar
coincidencias con las huellas almacenadas en la
base de datos se realiza el emparejado.
Las huellas tienen una primera clasificación según
el patrón general que sigue, así, existe la
clasificación de Henry, que distingue 5 tipos de
huellas (right loop, left loop, whorl, arch y tented arch). Una vez clasificada la huella
dentro de uno de ellos se procede a buscar dentro del grupo apropiado la huella que
más se parece a la que deseamos identificar. Para esta parte también existe un gran
número de algoritmos, que no vamos a explicar. Es importante destacar que para este
proceso una comparación exhaustiva de las huellas almacenadas con la huella a
identificar es un proceso muy costoso, por lo que se recurre a algoritmos no tan
efectivos como el de “fuerza bruta” pero mucho más rápidos. Entre estos últimos las
mejores soluciones son las proporcionadas por redes neuronales, la transformada de
Hough o en algoritmos genéticos.
Ilustración 14. Huella Dactilar
21
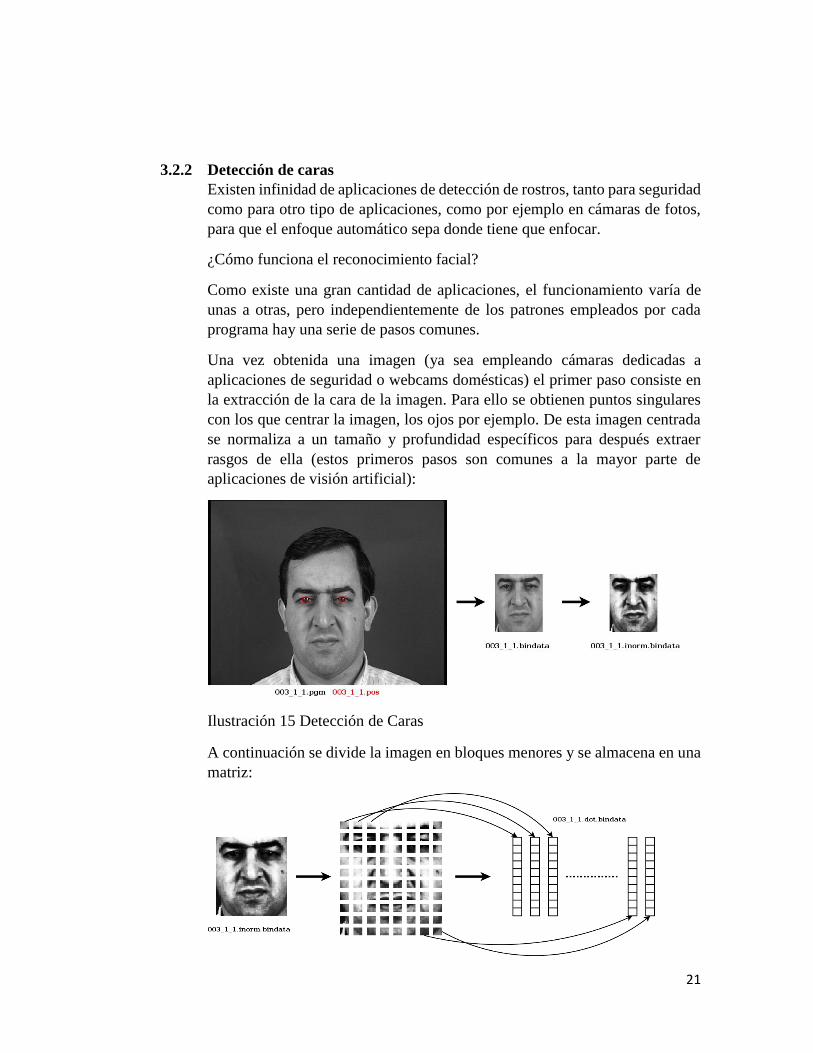
3.2.2 Detección de caras
Existen infinidad de aplicaciones de detección de rostros, tanto para seguridad
como para otro tipo de aplicaciones, como por ejemplo en cámaras de fotos,
para que el enfoque automático sepa donde tiene que enfocar.
¿Cómo funciona el reconocimiento facial?
Como existe una gran cantidad de aplicaciones, el funcionamiento varía de
unas a otras, pero independientemente de los patrones empleados por cada
programa hay una serie de pasos comunes.
Una vez obtenida una imagen (ya sea empleando cámaras dedicadas a
aplicaciones de seguridad o webcams domésticas) el primer paso consiste en
la extracción de la cara de la imagen. Para ello se obtienen puntos singulares
con los que centrar la imagen, los ojos por ejemplo. De esta imagen centrada
se normaliza a un tamaño y profundidad específicos para después extraer
rasgos de ella (estos primeros pasos son comunes a la mayor parte de
aplicaciones de visión artificial):
Ilustración 15 Detección de Caras
A continuación se divide la imagen en bloques menores y se almacena en una
matriz:
22
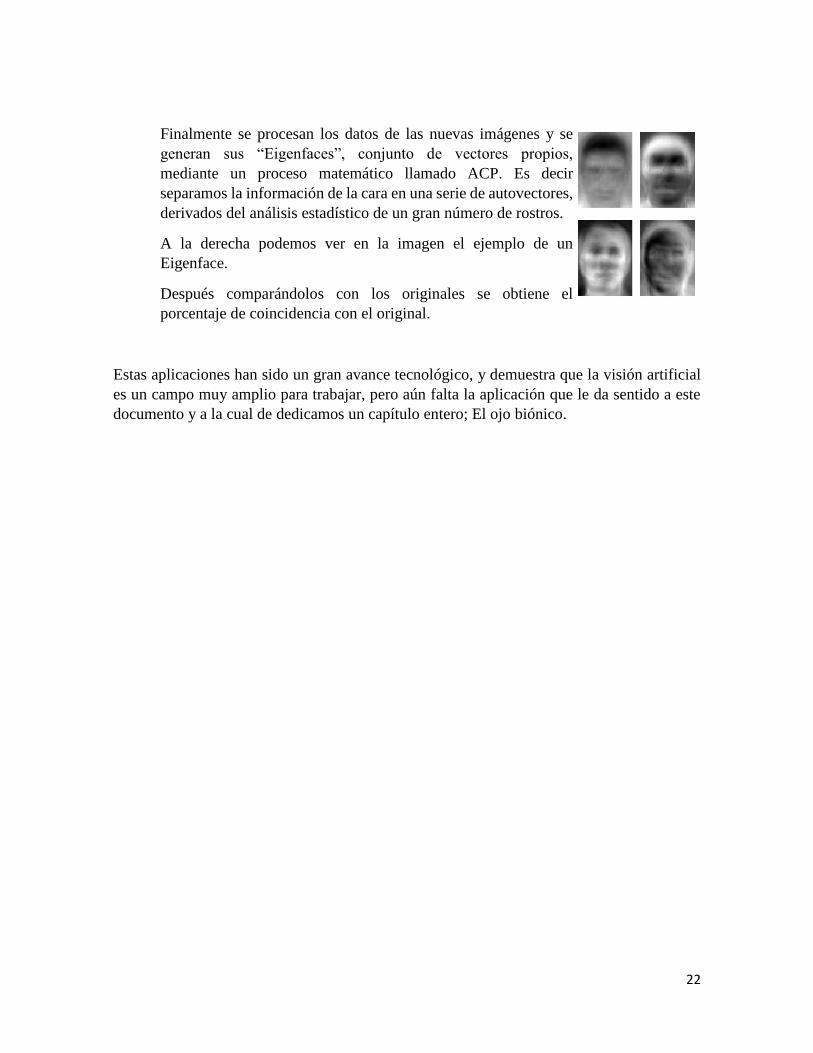
Finalmente se procesan los datos de las nuevas imágenes y se
generan sus “Eigenfaces”, conjunto de vectores propios,
mediante un proceso matemático llamado ACP. Es decir
separamos la información de la cara en una serie de autovectores,
derivados del análisis estadístico de un gran número de rostros.
A la derecha podemos ver en la imagen el ejemplo de un
Eigenface.
Después comparándolos con los originales se obtiene el
porcentaje de coincidencia con el original.
Estas aplicaciones han sido un gran avance tecnológico, y demuestra que la visión artificial
es un campo muy amplio para trabajar, pero aún falta la aplicación que le da sentido a este
documento y a la cual de dedicamos un capítulo entero; El ojo biónico.

CAPITULO IV
EL OJO BIONICO
Quizás nuestros padres recordaran al hombre nuclear, también conocido como “The Six
Million Dollar Man”, un hombre que sufre un terrible accidente durante un vuelo, perdiendo
sus extremidades y su ojo izquierdo, una agencia gubernamental que trabajaba en un
programa secreto llamado Biónica toma a este hombre como sujeto de prueba y reemplaza
sus miembros perdidos por partes cibernéticas que tienen un costo de seis millones de dólares.
Esta historia no fue nada más que pura ciencia ficción de hace 30 años, pero aunque parezca
mentira, la mayoría de avances tecnológicos surgen gracias a estas ideas, y así paso con el
ojo biónico, que en este caso se llama Argus II7, un sistema de prótesis de retina desarrollado
por la empresa californiana Second Sight.
El Argus II tiene por objeto proporcionar la estimulación eléctrica de la retina para inducir la
percepción visual en personas invidentes. Una microcámara alojada en las gafas del paciente
captura una escena y ésta se envía a un pequeño ordenador que el paciente lleva encima (la
unidad de procesamiento de vídeo o VPU, por sus siglas en inglés) donde se procesa y
transforma en instrucciones que se envían de vuelta a las gafas mediante un cable. Estas
instrucciones se transmiten de forma inalámbrica a la antena del implante de retina. Las
señales se envían al conjunto de electrodos, que emite pequeños impulsos de electricidad.
Estos impulsos pasan por alto los fotorreceptores dañados y estimulan las células que quedan
en la retina y que transmiten la información visual a través del nervio óptico al cerebro, para
crear la percepción de patrones de luz. Los pacientes aprenden a interpretar estos patrones
visuales con su implante de retina.
Ilustración 16 Argus II
7 Link de Second Sight http://www.secondsight.com/?lang=es
24
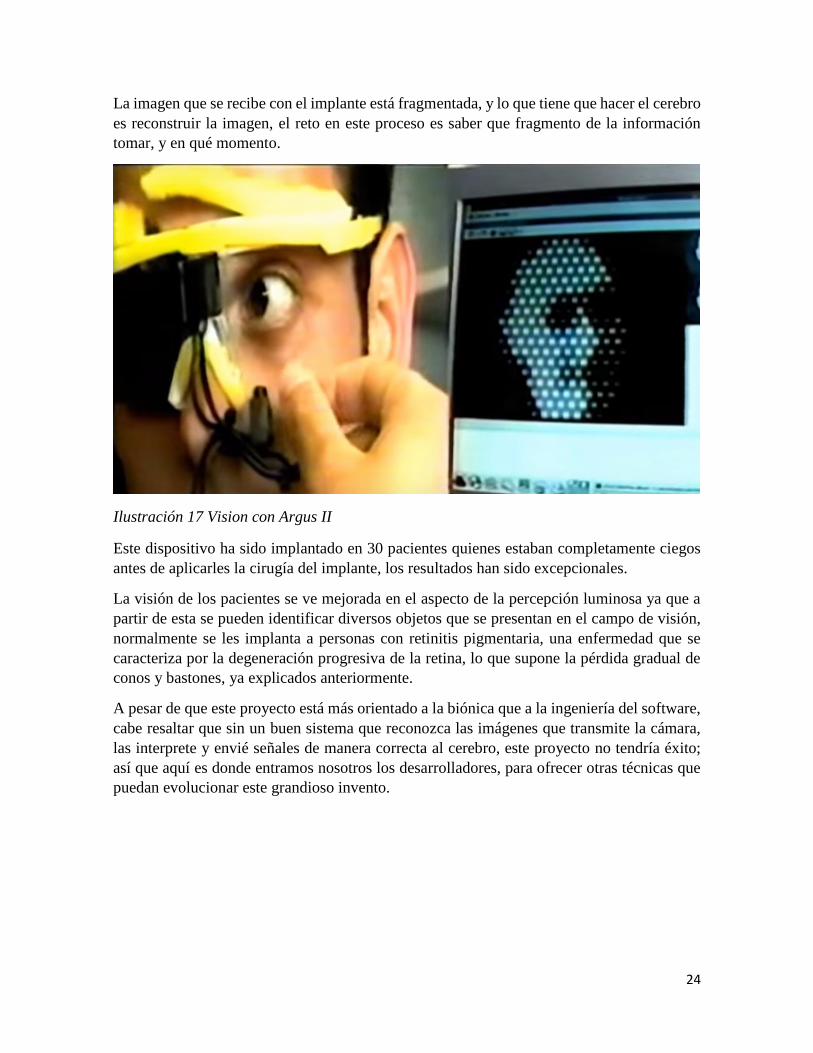
La imagen que se recibe con el implante está fragmentada, y lo que tiene que hacer el cerebro
es reconstruir la imagen, el reto en este proceso es saber que fragmento de la información
tomar, y en qué momento.
Ilustración 17 Vision con Argus II
Este dispositivo ha sido implantado en 30 pacientes quienes estaban completamente ciegos
antes de aplicarles la cirugía del implante, los resultados han sido excepcionales.
La visión de los pacientes se ve mejorada en el aspecto de la percepción luminosa ya que a
partir de esta se pueden identificar diversos objetos que se presentan en el campo de visión,
normalmente se les implanta a personas con retinitis pigmentaria, una enfermedad que se
caracteriza por la degeneración progresiva de la retina, lo que supone la pérdida gradual de
conos y bastones, ya explicados anteriormente.
A pesar de que este proyecto está más orientado a la biónica que a la ingeniería del software,
cabe resaltar que sin un buen sistema que reconozca las imágenes que transmite la cámara,
las interprete y envié señales de manera correcta al cerebro, este proyecto no tendría éxito;
así que aquí es donde entramos nosotros los desarrolladores, para ofrecer otras técnicas que
puedan evolucionar este grandioso invento.

CONCLUSIONES
La idea de visión artificial ha suscitado mucha imaginación y muchas preguntas al respecto,
ya que sus palabras sugieren algo nuevo y extraño. Se trata de una nueva herramienta que
busca dar solución a problemas de visión, y también de dar soluciones a procesos
industriales, a diagnosticar enfermedades en ramas como la medicina, innovación para el
desarrollo de sistemas de seguridad, entre otras aplicaciones que tiene. La evolución de esta
tecnología depende de nosotros, es un campo no muy explorado y que está esperando ahí
para cambiar la vida de muchas personas.
Con el desarrollo de este nuevo campo de la inteligencia artificial, se busca dar soluciones
a problemas que años atrás eran intratables, con el avance que este campo está presentando
día a día muy seguramente se les encuentre una pronta solución.
Para trabajar con visión artificial, es necesario tener unas buenas bases de algebra lineal y
tener claro que las aplicaciones que se desarrollen bajo este método deben ser pensadas en
un mundo real y no ideal.
BIBLIOGRAFIA
Es.wikipedia.org, (2015). Visión artificial. [online] Available at: https://es.wikipedia.org/wiki/Visi%C3%B3n_artificial [Accessed 5 Dec. 2015]. YouTube, (2015). Ojo Biónico es una Realidad y Ayuda a Recuperar Vista a Invidentes. [online] Available at: https://www.youtube.com/watch?v=uaO4JK8Ceq0 [Accessed 5 Dec. 2015]. Bernardo, A. and Bernardo, A. (2013). El primer ojo biónico del mundo, Argus II, comienza a usarse en Estados Unidos. [online] Think Big. Available at: http://blogthinkbig.com/el-primer-ojo-bionico-del-mundo/ [Accessed 5 Dec. 2015]. Secondsight.com, (2015). Second Sight Home Page. [online] Available at: http://www.secondsight.com/ [Accessed 5 Dec. 2015]. YouTube, (2015). Visión artificial Argus II - Dr. Jeroni Nadal. [online] Available at: https://www.youtube.com/watch?v=fIIOWJpU3Nw [Accessed 5 Dec. 2015]. YouTube, (2015). 01 - Curso De Visión Por Computador - Introducción. [online] Available at: https://www.youtube.com/watch?v=3iUEWenA-VM [Accessed 5 Dec. 2015]. YouTube, (2015). La visión artificial. [online] Available at: https://www.youtube.com/watch?v=h38G3ZM7zc8 [Accessed 5 Dec. 2015]. Sabia.tic.udc.es, (2015). Visión artificial e interacción sin mandos. [online] Available at: http://sabia.tic.udc.es/gc/Contenidos%20adicionales/trabajos/3D/VisionArtificial/index.html [Accessed 5 Dec. 2015].
