instituto de tecnologia para o desenvolvimento...
TRANSCRIPT

INSTITUTO DE TECNOLOGIA PARA O DESENVOLVIMENTO
INSTITUTO DE ENGENHARIA DO PARANÁ
PROGRAMA DE PÓS-GRADUAÇÃO
EM DESENVOLVIMENTO DE TECNOLOGIA
SERGIO SOUZA PRESTES
METODOLOGIA PARA PROJETO E ALOCAÇÃO DE FILTROS PASSIVOS EM INSTALAÇÕES INDUSTRIAIS
CURITIBA
2013

SERGIO SOUZA PRESTES
METODOLOGIA PARA PROJETO E ALOCAÇÃO ÓTIMOS DE FILTROS
PASSIVOS INDUSTRIAIS
Dissertação apresentada ao Programa de Pós-
Graduação em Desenvolvimento de Tecnologia
(PRODETEC) realizado pelo Instituto de Tecnologia
para o Desenvolvimento (LACTEC) em parceria
com o Instituto de Engenharia do Paraná (IEP)
como requisito na obtenção do título de Mestre em
Desenvolvimento de Tecnologia e Meio Ambiente.
Orientador: Prof. D.Sc. Cresencio S. Segura Salas
CURITIBA
2013

Prestes, Sergio Souza Metodologia para projeto e alocação de filtros passivos em instalações industriais / Sergio Souza Prestes. Curitiba, 2013. 123 f. : tabs., figs., grafs.
Orientador: Prof. Dr. Cresencio Silvio Segura Salas Dissertação (Mestrado) – Instituto de Tecnologia para o Desenvolvimento - LACTEC, Programa de Pós-Graduação em Desenvolvimento de Tecnologia – PRODETEC.
1. Filtro passivo. 2. Distorção harmômica. 3. Compensação reativa. I. Salas, Cresencio Silvio Segura. II. Título. III. Instituto de Tecnologia para o Desenvolvimento – LACTEC. CDD 621.381532
iv

v
DEDICATÓRIA
Dedico esse trabalho a minha querida
esposa Vanessa por estar sempre presente
quando preciso tanto afetivamente quanto
profissionalmente, e a minha filha Sofia que
enche de alegria os meus dias.
vi
AGRADECIMENTOS
Ao meu orientador, Prof. Dr. Cresencio Silvio Salas, pelo acompanhamento,
orientação e amizade.
Ao Curso de Mestrado Profissionalizante em Desenvolvimento de
Tecnologia, do Programa de Pós-Graduação de desenvolvimento de Tecnologia, na
pessoa do seu coordenador Prof. Dr. Alexandre Rasi Aoki, pelo apoio recebido.
Ao Colegiado do Mestrado Profissionalizante em Desenvolvimento de
Tecnologia, pela compreensão aos momentos difíceis.
vii
RESUMO
O Produto Interno Bruto brasileiro vem apresentando um crescimento devido ao crescimento da indústria e do setor de serviços no Brasil, este crescimento gera um incremento na demanda energética do país. O Operador Nacional do Sistema publicou no PEN 2012 que se for considerado um crescimento de 4% do PIB entre os anos de 2012 e 2016 a carga de energia no sistema elétrico nacional chegará a 71 GW médios em 2016, neste mesmo momento a capacidade instalada deverá chegar em 145 GW, mas o subsistema sul apresenta uma deficiência energética durante todo o período analisado. Uma das formas de reduzir o impacto no Sistema Integrado Nacional é elevar a eficiência energética dos consumidores. O presente trabalho tem como objetivo apresentar uma metodologia para o projeto ótimo de filtro harmônico passivo sintonizado simples para um sistema industrial com a finalidade de melhorar a eficiência e qualidade deste consumidor. A metodologia foi desenvolvida levando em consideração as informações disponíveis em unidades industriais típicas. Este tipo de sistema industrial possui normalmente a entrada de energia em 13,8 kV e cargas trifásicas lineares e não lineares distribuídas em diversos barramentos com tensão nominal de 220 V à 13,8 kV. O levantamento de dados foi realizado a partir do diagrama unifilar da unidade e foram estimados os níveis de corrente harmônica individual com base na bibliografia existente e catálogo dos fabricantes dos equipamentos elétricos. Para a análise da influência que a inserção do filtro de harmônica terá no sistema é necessário representar eletricamente o sistema e encontrar o equivalente de Thevenin no ponto de conexão do filtro. Portanto, foi necessário um bom detalhamento dos modelos dos componentes elétricos utilizados na simulação do sistema. Com os modelos definidos, a formulação do problema considera como variáveis a posição de instalação dos filtros e parâmetros dos filtros para cada frequência harmônica. As limitações técnicas de operação dos filtros também foram consideradas no cálculo. Para a solução do problema do projeto ótimo do filtro foram utilizados os algoritmos genéticos do Matlab que fornece a solução quase-ótima para o problema proposto em termos de local e parâmetros operacionais já com os custos de aquisição, instalação e manutenção. Na simulação, a distorção harmônica total de corrente (DHTI) no ponto de acoplamento comum (PAC) da instalação industrial foi reduzida de 71% para 8%, mostrando que a metodologia proposta fornece soluções de boa qualidade para atender aos requisitos de distorções harmônicas das normas IEEE 519 (1992) e PRODIST. A análise de viabilidade econômica para o sistema em estudo mostrou um retorno do investimento de 2,3 anos para a instalação de filtros em média tensão, atendendo desta maneira à premissa imposta pela indústria estudada de retorno máximo de três anos. Palavras-Chave: Filtro. Distorção harmônica. Compensação reativa. Modelagem do sistema elétrico.

viii
ABSTRACT
The Brazilian gross domestic product has increased due to the growth of the industry and services sectors in Brazil. This growth causes an increase in the country’s electricity demand. The electric system national operator published in the PEN 2012 that, if a 4% growth is considered in GDP between 2012 and 2016, the energy load on the national power system will reach 71 GW on average in 2016, at this point the installed capacity should reach 145 GW. The south subsystem has an energy deficiency throughout this whole period. One way to reduce the impact on the electrical national integrated system is to increase the consumer’s efficiency. This dissertation’s target is to present an optimal design methodology for the single-tuned passive harmornic filter for typical industrial systems in order to improve the consumer’s efficiency and quality. The methodology was developed using information available on typical industrial units. This kind of industrial system usually has a 13.8 kV power input and linear and nonlinear three-phase loads distributed in several buses with nominal voltage of 220 V to 13.8 kV. The basis for the survey was the industry’s one-line diagram and the individual harmonic current was estimated based on existing literature and catalogs of electrical equipment manufacturers. In order to analyze the influences of the harmonic filter insertion in the system, it is necessary to represent electrically the system and then find the Thevenin equivalent at the filter’s connection point. Therefore, good electrical components models used in the system simulation are needed. With the defined model, the problem formulation considers as variables the filter installation position and filter parameters for each harmonic frequency. The technical limitations of the filter operation were also considered in the problem formulation. A Matlab’s genetic algorithm that provides a near-optimal solution in terms of location and operational parameters, such as the acquisition, installation and maintenance cost, is used to solve the filter optimal design problem. In the simulation, the total current harmonic distortion (THDI) at the point of common coupling (PCC) was reduced from 71% to 8%, showing that the proposed methodology meets the harmonic distortions’ requirements of the IEEE 519 (1992) and PRODIST standards. The economic viability analysis in this study shows a payback of 2.3 years when filters are installed on high voltage bus, attending the maximal payback required (3 years) by studied industry. Keywords: Filter, harmonic distortion, reactive compensation, total harmonic distortion, modeling of electrical system.
ix
LISTA DE FIGURAS
FIGURA 1 – PARTIDA DIRETA ................................................................................ 21
FIGURA 2 – PARTIDA ESTRELA-TRIÂNGULO ....................................................... 22
FIGURA 3 – PARTIDA COM REVERSÃO ................................................................ 22
FIGURA 4 – PARTIDA COMPENSADORA ............................................................... 23
FIGURA 5 – PARTIDA COM SOFT-START .............................................................. 23
FIGURA 6 – GRÁFICO DE CONJUGADO X VELOCIDADE .................................... 24
FIGURA 7 – ESQUEMA DE POTÊNCIA DO GRADADOR ....................................... 25
FIGURA 8 – RETIFICADOR MONOFÁSICO EM PONTE ......................................... 25
FIGURA 9 – FORMAS DE ONDA PARA CARGA RL ............................................... 26
FIGURA 10 – GRADADOR MONOFÁSICO COM CARGA RL ................................. 26
FIGURA 11 – FORMAS DE ONDA PARA GRADADOR MONOFÁSICO COM
CARGA RL ........................................................................................ 27
FIGURA 12 – AMPLITUDE DA HARMÔNICA DE CORRENTE DE ORDEM 5 EM
RELAÇÃO À ................................................................................. 28
FIGURA 13 – AMPLITUDE DA HARMÔNICA DE CORRENTE DE ORDEM 3 EM
RELAÇÃO À ................................................................................. 29
FIGURA 14 – CARGA LIGADA EM DELTA .............................................................. 29
FIGURA 15 – RETIFICADOR TRIFÁSICO DE ONDA COMPLETA A DIODO .......... 30
FIGURA 16 – FORMA DE ONDA PARA O CIRCUITO MOSTRADO NA FIGURA 15
........................................................................................................... 31
FIGURA 17 – RETIFICADOR TRIFÁSICO DE ONDA COMPLETA A DIODO COM
FILTRO CAPACITIVO ....................................................................... 32
FIGURA 18 – FORMA DE ONDA PARA O CIRCUITO MOSTRADO NA FIGURA 17
........................................................................................................... 32
FIGURA 19 – TÍPICO DO INVERSOR DE FREQÜÊNCIA ........................................ 33
x
FIGURA 20 – EXEMPLO DE ESPECTRO HARMÔNICO ......................................... 36
FIGURA 21 – ALGORITMO GENÉTICO ................................................................... 40
FIGURA 22 – FILTRO PASSIVO SERIE SINTONIZADO SIMPLES ......................... 42
FIGURA 23 – FILTRO PASSIVO SERIE SINTONIZADO DUPLO ............................ 42
FIGURA 24 – FILTRO PASSIVO PARALELO SINTONIZADO SIMPLES ................. 43
FIGURA 25 – EQUIVALENTE PARA ANÁLISE E CÁLCULO DO FILTRO SHUNT . 44
FIGURA 26 – FILTRO PASSIVO PARALELO SINTONIZADO DUPLO .................... 46
FIGURA 27 – FILTRO PASSIVO PARALELO PASSA ALTA DE PRIMEIRA ORDEM
........................................................................................................... 46
FIGURA 28 – FILTRO PASSIVO PARALELO PASSA ALTA DE SEGUNDA ORDEM
........................................................................................................... 47
FIGURA 29 – INFLUÊNCIA DA TEMPERATURA NA SINTONIA DO FILTRO
PARALELO PASSA ALTA DE SEGUNDA ORDEM .......................... 48
FIGURA 30 – FILTRO PASSIVO PARALELO PASSA ALTA DE TERCEIRA ORDEM
........................................................................................................... 49
FIGURA 31 – FILTRO PASSIVO PARALELO PASSA ALTA TIPO C ....................... 50
FIGURA 32 – DIAGRAMA UNIFILAR SIMPLIFICADO DE UMA UNIDADE
INDUSTRIAL ..................................................................................... 51
FIGURA 33 – RESPOSTA DE UM FILTRO SINTONIZADO SIMPLES .................... 56
FIGURA 34 – RESPOSTA DE UM FILTRO SINTONIZADO SIMPLES CONECTADO
A UM SISTEMA. ................................................................................ 56
FIGURA 35 – METODOLOGIA DE CÁLCULO ÓTIMO DE UM FILTRO................... 58
FIGURA 36 – MODELO DO MOTOR DE INDUÇÃO ................................................ 63
FIGURA 37 – MODELO DO MOTOR DE INDUÇÃO E DO TRANSFORMADOR ..... 64
FIGURA 38 – CUSTO DO INDUTOR LINEARIZADO ............................................... 69
FIGURA 39 – CODIFICAÇÃO DO ALGORITMO GENÉTICO ................................... 72
FIGURA 40 – RESULTADO DO ALGORITMO GENÉTICO ...................................... 72
xi
FIGURA 41 – SOLUÇÃO DO PROBLEMA ............................................................... 74
FIGURA 42 – PARAMETRIZAÇÃO DO ALGORITMO GENÉTICO .......................... 84
FIGURA 43 – EVOLUÇÃO DAS RESPOSTAS DO ALGORITMO GENÉTICO ........ 85
xii
LISTA DE TABELAS
TABELA 1 – LIMITES DE DISTORÇÃO HARMÔNICA DE TENSÃO NO PAC ........ 35
TABELA 2 – LIMITES DE DISTORÇÃO HARMÔNICA DE CORRENTE NO PAC ... 35
TABELA 3 – DADOS DA PLANTA ............................................................................ 52
TABELA 4 – CORRENTES HARMÔNICAS IH PRESENTE NO SISTEMA ............... 52
TABELA 5 – THDI NO PONTO DE ACOPLAMENTO ............................................... 53
TABELA 6 – SOLUÇÃO PARA E ................................................................... 55
TABELA 7 – SOLUÇÃO PARA CI ............................................................................. 55
TABELA 8 – SOLUÇÃO PARA LI .............................................................................. 55
TABELA 9 – SOLUÇÃO PARA RI ............................................................................. 56
TABELA 10 – CAPACITORES APRESENTADOS NA RESPOSTA DO ALGORITMO
GENÉTICO ........................................................................................ 73
TABELA 11 – DADOS COMPILADOS DOS CCMS .................................................. 79
TABELA 12 – CORRENTES HARMÔNICAS PRESENTES NA UNIDADE
INDUSTRIAL ..................................................................................... 81
TABELA 13 – LIMITE DE DISTORÇÃO HARMÔNICA DE CORRENTE NO PAC NO
ESTUDO DE CASO ........................................................................... 82
TABELA 14 – THDI NO PAC ANTES DA INSTALAÇÃO DOS FILTROS ................. 83
TABELA 15 – CAPACITORES UTILIZADOS NA SOLUÇÃO ÓTIMA ....................... 86
TABELA 16 – INDUTÂNCIA DOS INDUTORES UTILIZADOS NA SOLUÇÃO ÓTIMA
........................................................................................................... 86
TABELA 17 – POTÊNCIA DOS INDUTORES UTILIZADOS NA SOLUÇÃO ÓTIMA 86
TABELA 18 – THDI NO PAC ANTES E APÓS A INSTALAÇÃO DOS FILTROS ...... 87
TABELA 19 – CUSTO TOTAL DO FILTRO ............................................................... 87
TABELA 20 – CAPACITORES UTILIZADOS NA SOLUÇÃO ÓTIMA PARA BARRAS
EM BT ................................................................................................ 89
xiii
TABELA 21 – INDUTÂNCIA DOS INDUTORES UTILIZADOS NA SOLUÇÃO ÓTIMA
PARA BARRAS EM BT ..................................................................... 90
TABELA 22 – POTÊNCIA DOS INDUTORES UTILIZADOS NA SOLUÇÃO ÓTIMA
PARA BARRAS EM BT ..................................................................... 90
TABELA 23 – THDI NO PAC ANTES E APÓS A INSTALAÇÃO DOS FILTROS ...... 91
TABELA 24 – CUSTO TOTAL DO FILTRO PARA BARRAS EM BT ........................ 91
TABELA 25 – CAPACITORES UTILIZADOS NA SOLUÇÃO ÓTIMA PARA BARRAS
EM MT ............................................................................................... 92
TABELA 26 – INDUTÂNCIA DOS INDUTORES UTILIZADOS NA SOLUÇÃO ÓTIMA
PARA BARRAS EM MT ..................................................................... 93
TABELA 27 – POTÊNCIA DOS INDUTORES UTILIZADOS NA SOLUÇÃO ÓTIMA
PARA BARRAS EM MT ..................................................................... 93
TABELA 28 – THDI NO PAC ANTES E APÓS A INSTALAÇÃO DOS FILTROS
PARA BARRAS EM MT ..................................................................... 94
TABELA 29 – CUSTO TOTAL DO FILTRO PARA BARRAS EM MT ........................ 94
xiv
SUMARIO
1. INTRODUÇÂO ................................................................................................... 15
1.1. MOTIVAÇÃO............................................................................................... 17
1.2. OBJETIVO GERAL ..................................................................................... 17
1.3. OBJETIVOS ESPECÍFICOS ....................................................................... 17
1.4. ESTRUTURA DA DISSERTAÇÃO .............................................................. 19
2. FUNDAMENTAÇÃO TEÓRICA ......................................................................... 20
2.1. TIPOS DE PARTIDAS ................................................................................ 20
2.1.1. Acionamento Linear ............................................................................... 20
2.1.2. Acionamento Não-Linear ....................................................................... 24
2.2. HARMÔNICOS ........................................................................................... 33
2.2.1. Definições e terminologia....................................................................... 34
2.2.2. Possíveis fontes de ruídos harmônicos ................................................. 37
2.3. ALGORITMOS GENÉTICOS ...................................................................... 38
3. REVISÃO BIBLIOGRÁFICA .............................................................................. 41
3.1. FILTROS PASSIVOS .................................................................................. 41
3.1.1. Filtro passivo em série ........................................................................... 42
3.1.2. Filtro passivo paralelo ............................................................................ 43
3.2. PROCEDIMENTO DE CÁLCULO MANUAL DE UM FILTRO PARALELO
SINTONIZADO SIMPLES ...................................................................................... 51
3.2.1. Levantamento de dados ........................................................................ 51
3.2.2. Identificação das correntes harmônicas presentes no sistema.............. 52
3.2.3. Formulação do sistema e restrições ...................................................... 52
3.2.4. Exemplo ................................................................................................. 55
3.2.5. Análise do sistema após a inserção do filtro .......................................... 56
3.2.6. Verificar limites ...................................................................................... 57
xv
4. METODOLOGIA DE CÁLCULO ÓTIMO DE UM FILTRO PARALELO
SINTONIZADO SIMPLES ......................................................................................... 58
4.1. LEVANTAMENTO DE DADOS ................................................................... 59
4.2. IDENTIFICAÇÃO DAS CORRENTES HARMÔNICAS PRESENTES NO
SISTEMA ............................................................................................................... 59
4.3. MODELAGEM DO SISTEMA ...................................................................... 61
4.3.1. Impedância Equivalente para transformador ......................................... 61
4.3.2. Impedância Equivalente para Condutor ................................................. 62
4.3.3. Impedância Equivalente para Carga ...................................................... 62
4.4. MONTANGEM DA MATRIZ ZBUS E ATUALIZAÇÃO DAS DISTORÇÕES
HARMÔNICAS COM NOVO FILTRO .................................................................... 66
4.5. FORMULAÇÃO DO PROBLEMA DO FILTRO ÓTIMO ............................... 67
4.5.1. Restrições .............................................................................................. 70
4.6. CODIFICAÇÃO DO PROBLEMA ................................................................ 71
4.6.1. Toolbox do algoritmo genético do Matlab .............................................. 73
4.7. SOLUÇÃO DO PROBLEMA ....................................................................... 74
4.8. ANÁLISE DE VIABILIDADE ECONÔMICA ................................................. 75
5. ESTUDO DE CASO ........................................................................................... 77
5.1. LEVANTAMENTO DE DADOS ................................................................... 77
5.2. IDENTIFICAÇÃO DAS CORRENTES HARMÔNICAS PRESENTES NO
SISTEMA ............................................................................................................... 79
5.3. FORMULAÇÃO DO SISTEMA E RESTRIÇÕES ........................................ 82
5.4. CÁLCULO DO FILTRO ÓTIMO .................................................................. 83
5.5. ANÁLISE DO SISTEMA APÓS A INSERÇÃO DO FILTRO E RESULTADOS
ENCONTRADOS PARA BARRAS DE BAIXA E MÉDIA TENSÃO ........................ 85
5.5.1. Análise comercial da solução proposta para instalação em barras de
baixa e média tensão ......................................................................................... 87
xvi
5.6. ANÁLISE DO SISTEMA APÓS A INSERÇÃO DO FILTRO E RESULTADOS
ENCONTRADOS PARA BARRAS DE BAIXA TENSÃO ....................................... 89
5.6.1. Análise comercial da solução proposta para instalação em barras de
baixa tensão ....................................................................................................... 91
5.7. ANÁLISE DO SISTEMA APÓS A INSERÇÃO DO FILTRO E RESULTADOS
ENCONTRADOS PARA BARRAS DE MEDIA TENSÃO ....................................... 92
5.7.1. Análise comercial da solução proposta para instalação em barras de
média tensão ...................................................................................................... 94
6. CONCLUSÕES E TRABALHOS FUTUROS ..................................................... 96
7. REFERÊNCIAS ................................................................................................. 98
APÊNDICE .............................................................................................................. 101
15
1. INTRODUÇÂO
O Produto Interno Bruto brasileiro vem apresentando um crescimento devido
ao crescimento da indústria e do setor de serviços no Brasil, este crescimento gera
um incremento na demanda energética do país. O Operador Nacional do Sistema
publicou no PEN 2012 que se for considerado um crescimento de 4% do PIB entre
os anos de 2012 e 2016 a carga de energia no sistema elétrico nacional chegará a
71 GW médios em 2016, neste mesmo momento a capacidade instalada deverá
chegar em 145 GW, mas o subsistema sul apresenta uma deficiência energética
durante todo o período analisado. Pode-se reduzir o impacto no Sistema Integrado
Nacional com o crescimento da eficiência energética dos consumidores.
Uma das soluções possíveis é a inserção de bancos de capacitores
chaveados, conforme orientação da Companhia Paranaense de Energia (2011) para
atender o limite mínimo de fator de potência exigido pelo artigo 95 da Resolução 414
(2010) da Agência Nacional de Energia Elétrica (ANEEL), e a redução do custo dos
acionamentos de velocidade variável, as plantas industriais estão elevando o
percentual de cargas não lineares instaladas (MUSKEINS; BOHAICHUK; XU, 2000)
e, com isto, os níveis de poluição harmônica na instalação (MCGRANAGHAN;
MULLER, 1999) e nas redes de distribuição de energia elétrica (PORRAS;
NARANJO; GALLEGO, 2003). Parte disto é produto da possível ressonância entre
os bancos de capacitores e a impedância do sistema, quando coincide com a
frequência harmônica das cargas não lineares, podem-se observar amplificações
harmônicas no ponto de acoplamento comum (PAC) entre consumidores e
concessionária. Como resultado, a amplificação de harmônicos pode se propagar
pela rede elétrica, poluindo outros consumidores, sempre procurando caminhos de
baixa impedância.
Considerando como referência o Procedimento de Distribuição de Energia
Elétrica no Sistema Elétrico Nacional (PRODIST), módulo 8, muitas empresas se
encontram acima dos níveis máximos de Distorção Harmônica de Tensão
(MAGALHÃES et al., 2009). Entretanto, a IEEE 519 (1992), nos itens 10.4 e 11.5,
16
apresenta recomendações mais severas em relação às distorções de tensão e
também inclui limites de distorção de corrente injetada pelo consumidor. Portanto, se
a intenção for alcançar os níveis recomendados pela IEEE, em muitos casos será
necessária a utilização de algum recurso para reduzir os efeitos das cargas não
lineares (DAS, 2003; NASSIF; XU, 2007; PORRAS; NARANJO; GALLEGO, 2003).
Com a pretensão de reduzir o impacto dos acionamentos não lineares na
qualidade de energia da planta é necessária à instalação de algum filtro para mitigar
a influência das harmônicas.
Apesar de existir a necessidade de instalação de filtros para reduzir os níveis
de harmônicas no sistema e atender ao PRODIST, Módulo 8, a utilização deste
recurso é limitado por vários fatores, sendo os principais o custo, a insuficiência de
conhecimento técnico quanto ao correto dimensionamento e a insuficiência de
conhecimento técnico quanto ao seu desempenho.
Visando contribuir para os esclarecimentos destes aspectos foi proposta
neste trabalho uma metodologia simples para a localização e dimensionamento de
filtros passivos partindo de dados disponíveis no ambiente industrial.
A metodologia proposta tem como base três referências importantes:
O estado-da-arte de projeto de filtros passivos apresentados na
revisão bibliográfica.
A modelagem harmônica consolidada do sistema elétrico proposta
pela IEEE harmonic task force (2003).
A metodologia de alocação de bancos de capacitores em sistemas de
distribuição de energia elétrica procurando evitar ressonâncias
harmônicas proposta em Segura et al. (2012) e Segura (2010).
Não foi analisada a resposta da metodologia proposta em indústrias que
possuem grandes cargas não lineares que são inseridas no sistema de forma
aleatória (por exemplo, fornos de indução e soldas elétricas). Sistemas que possuem
fontes de distorções harmônicas de tensão ou fontes de correntes harmônicas de
terceira ordem e seus múltiplos não podem utilizar esta metodologia.
17
1.1. MOTIVAÇÃO
Este trabalho foi motivado pela dificuldade apresentada por profissionais da
indústria em compreender e definir soluções viáveis para problemas relacionados a
distorções harmônicas, em especial um problema existente de qualidade de energia
numa unidade industrial de fertilizantes localizada no litoral norte do estado do
Paraná, porém, o procedimento de cálculo pode ser aplicado a outros tipos de
indústrias que apresentam as mesmas necessidades técnicas.
1.2. OBJETIVO GERAL
O objetivo principal desta pesquisa é desenvolver uma ferramenta
computacional para melhorar a qualidade da energia elétrica nos projetos de
instalações industriais, medida no ponto de conexão à rede de distribuição, e com
isto, melhorar a qualidade de energia de toda a rede. Consideram-se benefícios
técnicos adicionais e mitigações de possíveis efeitos negativos dos filtros ao sistema
elétrico.
1.3. OBJETIVOS ESPECÍFICOS
Este estudo deverá identificar oportunidades de elevar a qualidade de
energia da indústria com a instalação de filtros passivos, levando em consideração a
avaliação técnico-econômica da alternativa ótima para a instalação do filtro em
média ou baixa tensão, de acordo com a necessidade da planta fabril.
Os objetivos específicos a serem alcançados com este projeto são:
18
Desenvolver uma técnica de coleta de dados de cargas instaladas
(dados de placa dos motores, transformadores e seus respectivos
tipos de partida) e da característica de potência consumida do
sistema atual que caracterizem adequadamente o sistema.
Definir uma metodologia de modelagem elétrica equivalente para o
sistema industrial incluindo as cargas instaladas com o intuito de
simular o sistema existente em software. A modelagem deve incluir
as frequências harmônicas.
Realizar uma pesquisa das topologias e custos de filtros passivos
mais adequados no mercado brasileiro para a instalação em baixa
e média tensão.
Formular o problema de localização e dimensionamento ótimo de
filtro passivo considerando como a finalidade a minimização do
custo sujeito a um conjunto de restrições elétricas e físicas assim
como o sistema elétrico completo.
Aplicar uma técnica de inteligência artificial para resolver o
problema definido acima e definir um filtro ótimo para instalação
em baixa tensão ou em média tensão. Esta técnica ajudará a
escolher a melhor solução a custo mínimo, que cumpra requisitos
técnicos estabelecidos pelo PRODIST – Módulo 8.
Realizar a avaliação técnico-econômica para a escolha do melhor
local de alocação do filtro nos barramentos de média ou baixa
tensão.
19
1.4. ESTRUTURA DA DISSERTAÇÃO
O conteúdo do trabalho foi segregado em seis capítulos seguindo um
procedimento lógico de desenvolvimento tal como segue:
No capítulo dois é apresentada a fundamentação teórica necessária para o
desenvolvimento desta pesquisa, os conceitos iniciais e a terminologia de referência.
No capítulo três é tratada a revisão bibliográfica dos trabalhos mais
relevantes em filtros para mitigação de harmônicas, os cuidados básicos para a
escolha do local de instalação e o uso no cenário industrial. Ainda neste capítulo é
apresentado um exemplo de cálculo manual de um filtro paralelo sintonizado
simples, com a finalidade de ilustrar as dificuldades e limitações imposta ao cálculo
manual.
A metodologia empregada para o projeto ótimo de filtros passivos industriais
e que considera as instalações em média e baixa tensão é apresentada no capítulo
4.
No quinto capítulo é realizado o estudo de caso, onde é empregada a
metodologia apresentada no capítulo anterior. A caracterização da situação
abordada neste trabalho é detalhada neste mesmo capítulo, onde são apresentados
os resultados da pesquisa.
Por fim serão apresentadas as conclusões e sugestões para trabalhos
futuros no capítulo 6.
20
2. FUNDAMENTAÇÃO TEÓRICA
Neste capítulo serão abordados alguns aspectos técnicos relacionados à
pesquisa, são informações importantes para que o leitor tenha o embasamento
necessário para compreensão geral do trabalho. Este capítulo aborda as principais
formas de acionamento elétrico presente no ambiente industrial, algumas definições
que serão utilizadas no desenvolvimento do documento e a introdução ao método de
otimização utilizado.
2.1. TIPOS DE PARTIDAS
Existem vários dispositivos eletromecânicos e eletrônicos utilizados para
realizar a partida de motores, representados principalmente por contatores, chaves
compensadoras, chave de partida estática (soft start), e chaves de velocidades
variáveis (inversores de frequência).
Para o estudo dos ruídos harmônicos, podemos dividir os tipos de partidas
em dois grandes grupos: partidas lineares e partidas não-lineares.
2.1.1. Acionamento Linear
Para realizar a partida de um motor é necessário fazer a transição da tensão
de alimentação deste motor de zero para a tensão de trabalho (a tensão de trabalho
varia de acordo com o tipo de partida), e é este chaveamento que gera componentes
harmônicas indesejadas no sistema.
Os dispositivos de partidas lineares geram este chaveamento apenas
durante a partida, quando o acionamento finaliza este processo a tensão de
alimentação do dispositivo de partida é igual à da carga alimentada.
21
Após a realização de uma partida um segundo processo não é iniciado de
imediato, mantendo a carga com uma alimentação senoidal pura (considerando que
a alimentação do dispositivo de partida é senoidal pura também).
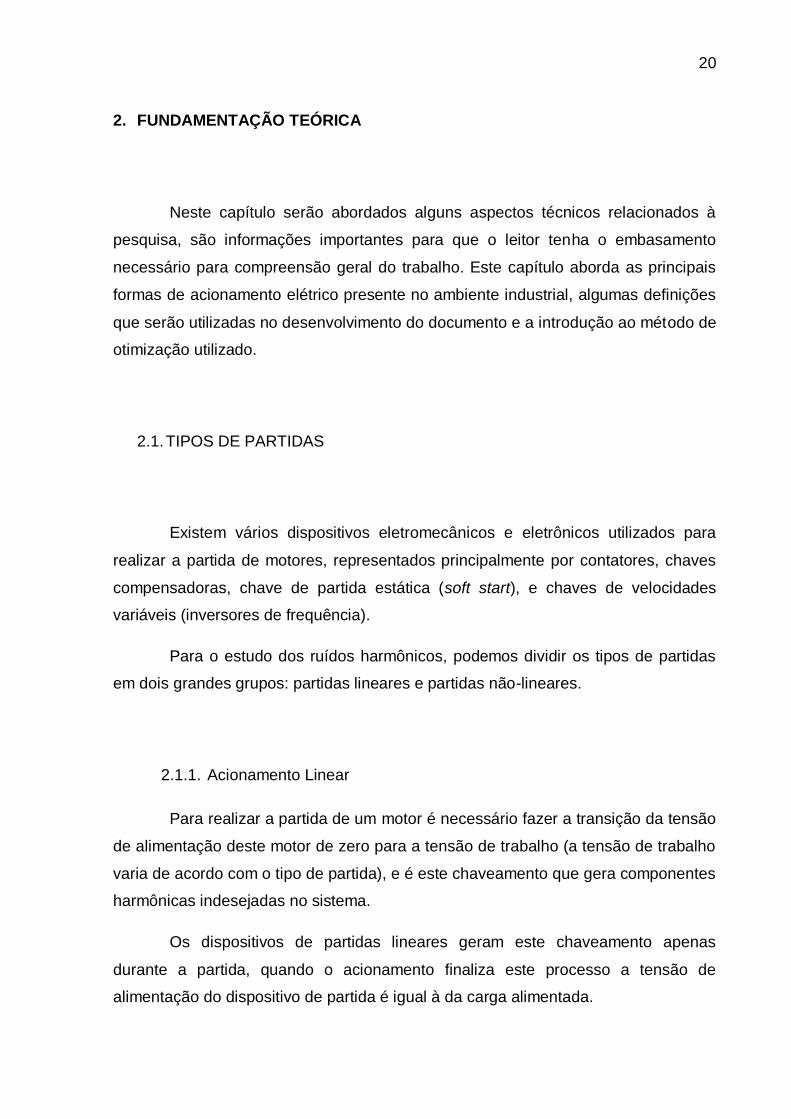
Entre os tipos de acionamentos lineares podemos citar o contator, que pode
ser utilizado na partida direta (Figura 1), estrela-triângulo (Figura 2), partida direta
com reversão (Figura 3) entre outras, neste grupo encontramos ainda a partida com
chave compensadora (Figura 4) e as partidas com gradadores (soft start - Figura 5)
que utilizam contator de bypass.
FIGURA 1 – PARTIDA DIRETA
FONTE: Autor (2012)
22
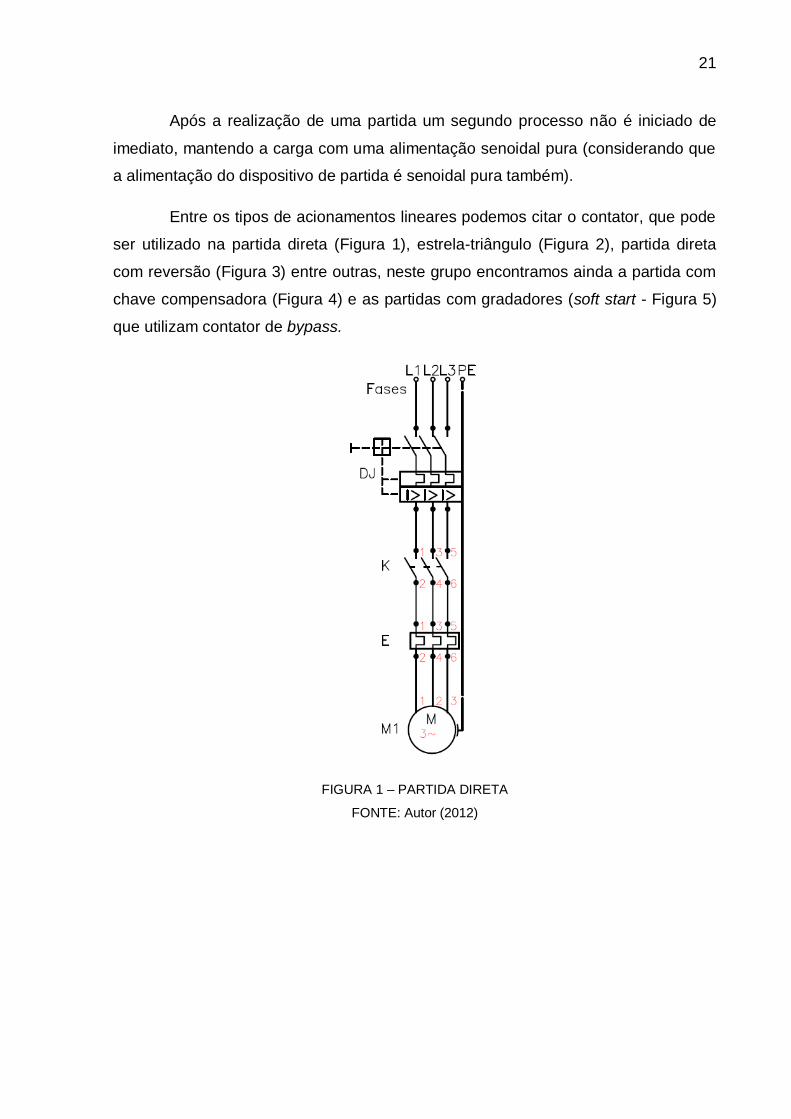
FIGURA 2 – PARTIDA ESTRELA-TRIÂNGULO
FONTE: Autor (2012)
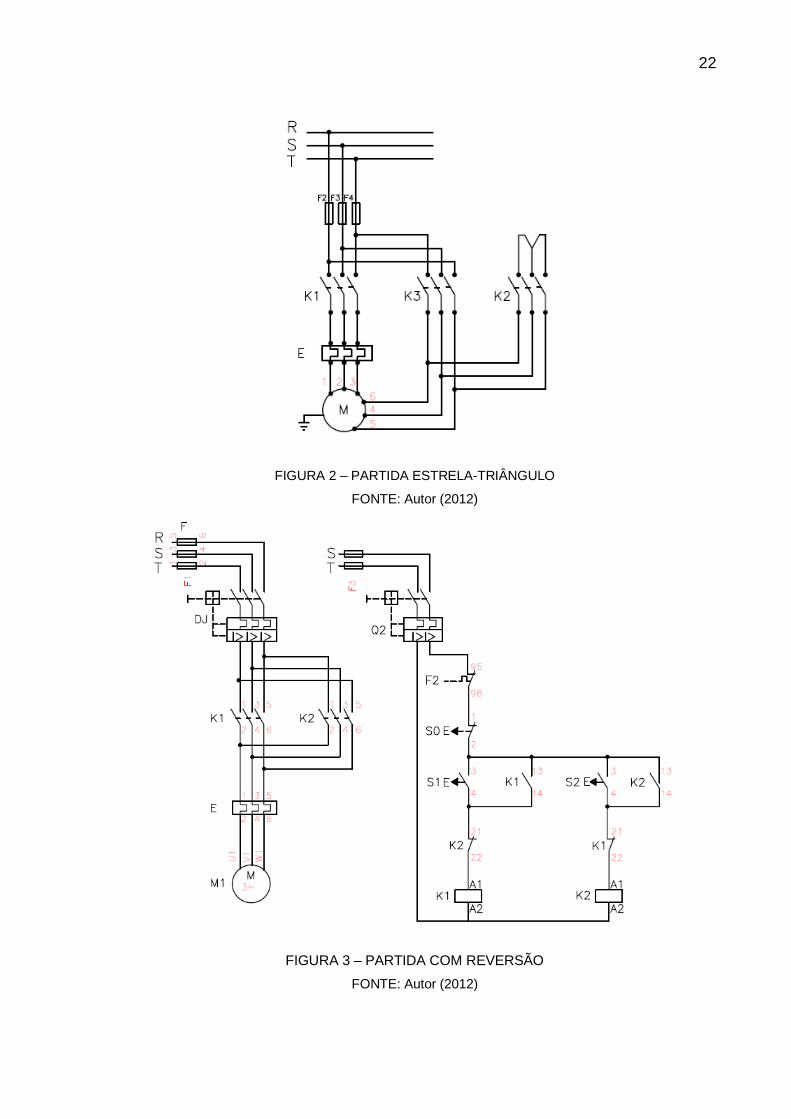
FIGURA 3 – PARTIDA COM REVERSÃO
FONTE: Autor (2012)
23
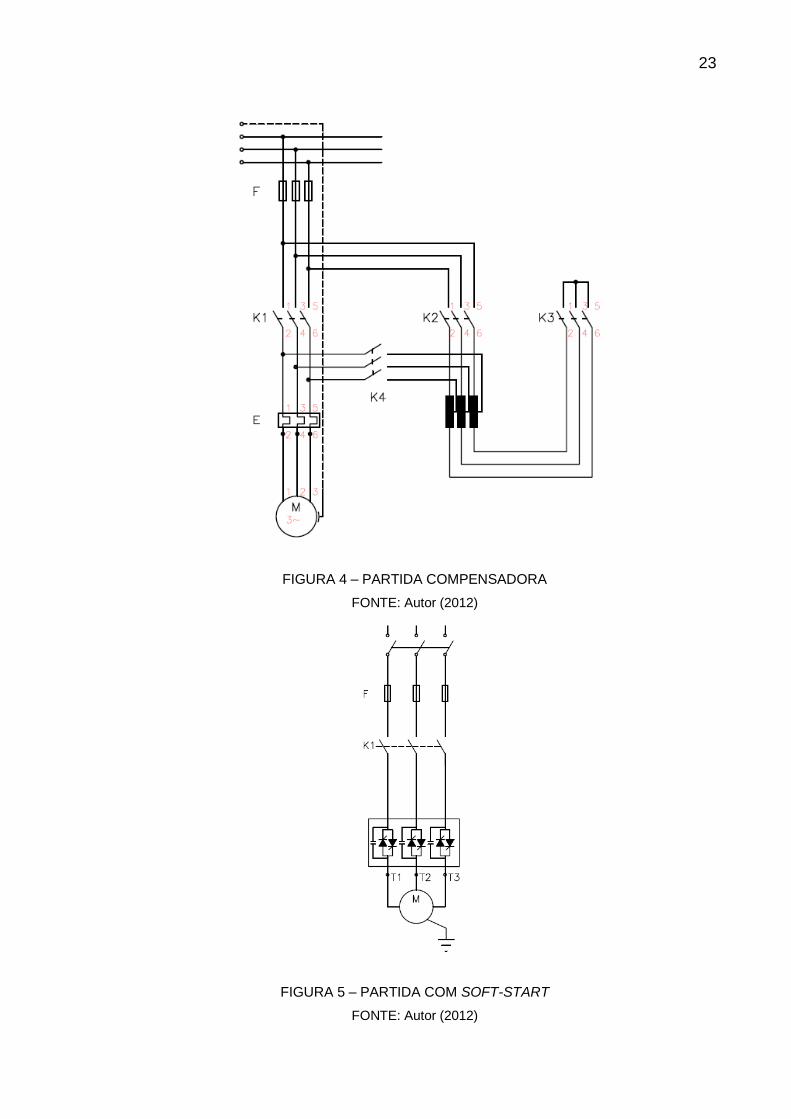
FIGURA 4 – PARTIDA COMPENSADORA
FONTE: Autor (2012)
FIGURA 5 – PARTIDA COM SOFT-START
FONTE: Autor (2012)
24
Normalmente a duração da partida é insignificante quando comparado com o
tempo de funcionamento da carga, por este motivo foi desconsiderado este evento
para fins de cálculo de distorção harmônico na rede.
2.1.2. Acionamento Não-Linear
Os dispositivos de acionamento não-lineares se utilizam de recursos
eletrônicos para melhorar a performance da carga e os principais exemplos
encontrados no ambiente industrial é a soft start e o inversor de frequência.
2.1.2.1. Principio de funcionamento do Gradador (Soft Start)
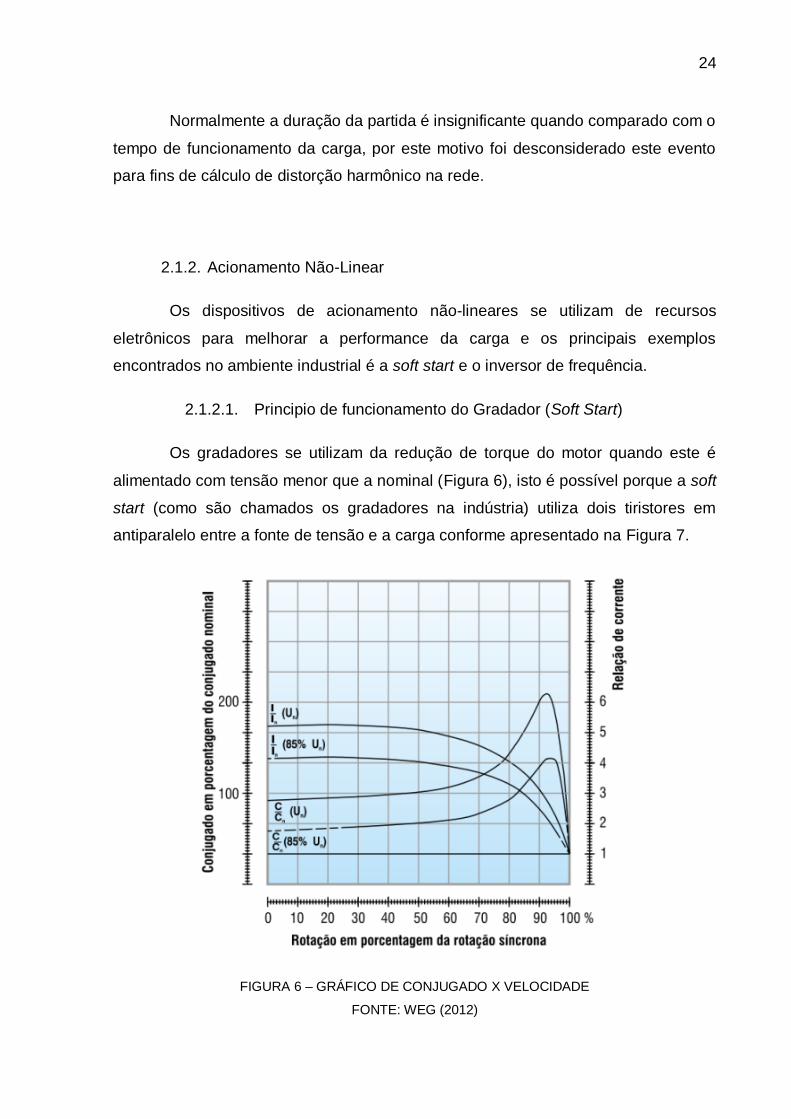
Os gradadores se utilizam da redução de torque do motor quando este é
alimentado com tensão menor que a nominal (Figura 6), isto é possível porque a soft
start (como são chamados os gradadores na indústria) utiliza dois tiristores em
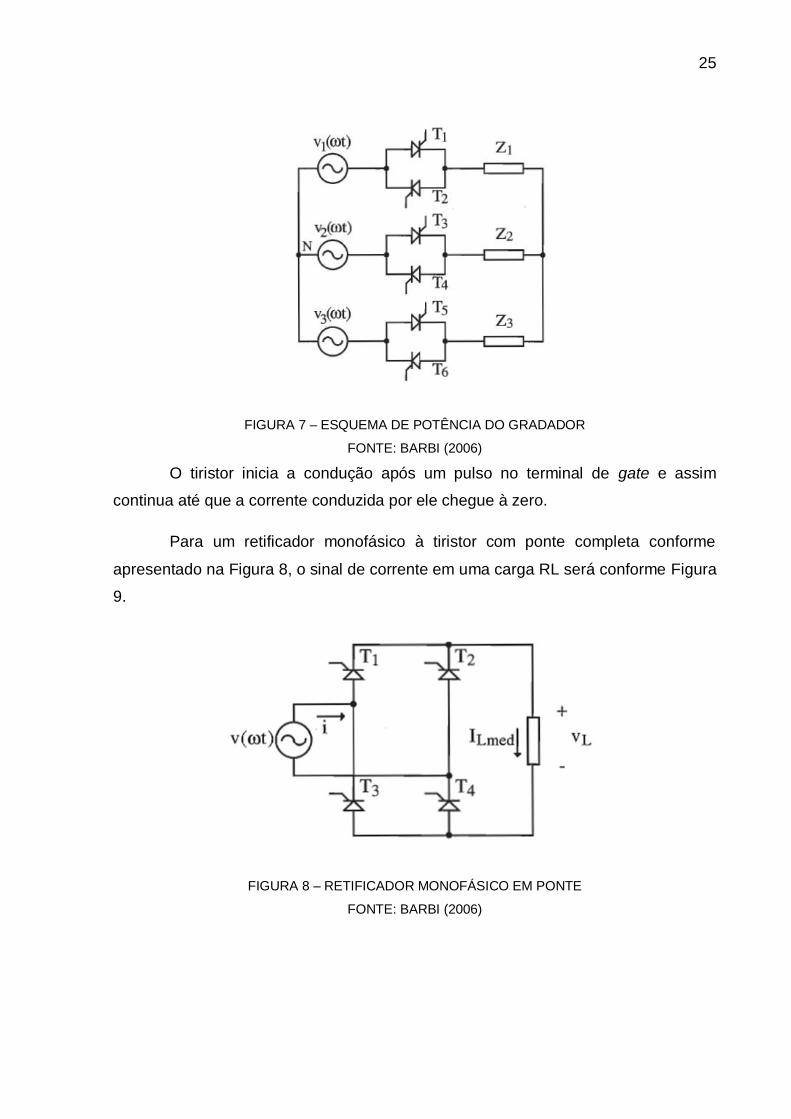
antiparalelo entre a fonte de tensão e a carga conforme apresentado na Figura 7.
FIGURA 6 – GRÁFICO DE CONJUGADO X VELOCIDADE
FONTE: WEG (2012)
25
FIGURA 7 – ESQUEMA DE POTÊNCIA DO GRADADOR
FONTE: BARBI (2006)
O tiristor inicia a condução após um pulso no terminal de gate e assim
continua até que a corrente conduzida por ele chegue à zero.
Para um retificador monofásico à tiristor com ponte completa conforme
apresentado na Figura 8, o sinal de corrente em uma carga RL será conforme Figura
9.
FIGURA 8 – RETIFICADOR MONOFÁSICO EM PONTE
FONTE: BARBI (2006)
26
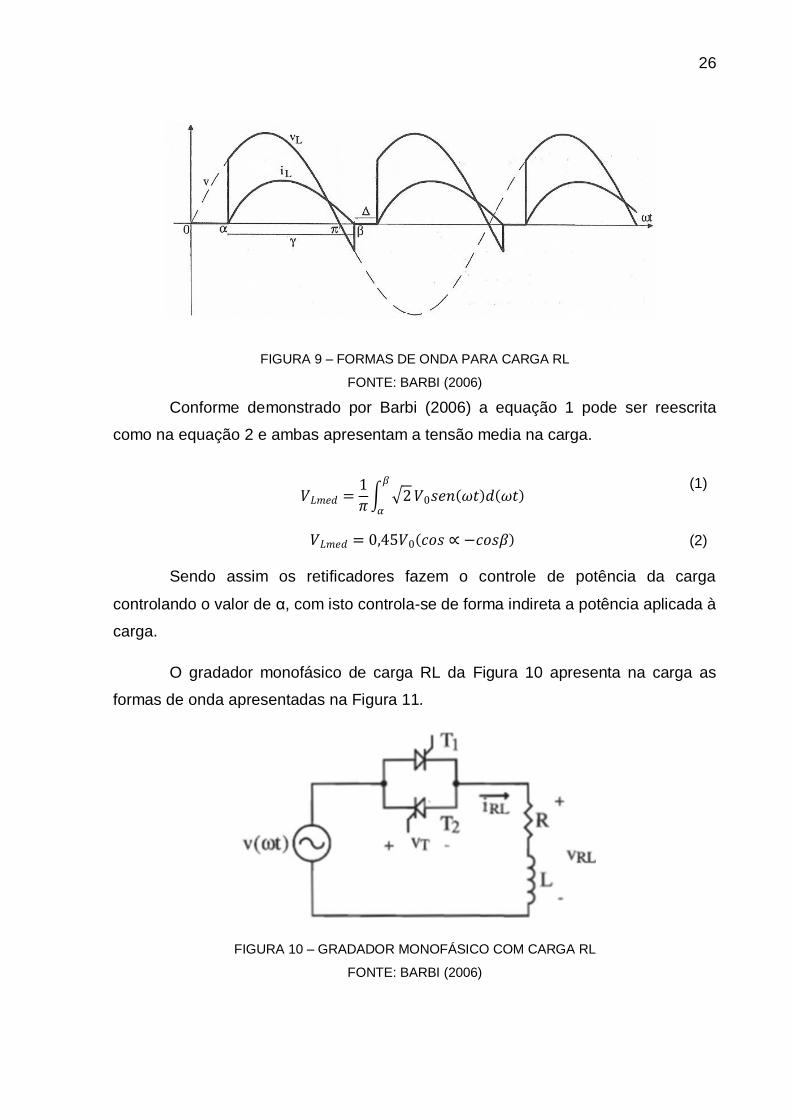
FIGURA 9 – FORMAS DE ONDA PARA CARGA RL
FONTE: BARBI (2006)
Conforme demonstrado por Barbi (2006) a equação 1 pode ser reescrita
como na equação 2 e ambas apresentam a tensão media na carga.
∫ √
( ) ( )
(1)
( ) (2)
Sendo assim os retificadores fazem o controle de potência da carga
controlando o valor de α, com isto controla-se de forma indireta a potência aplicada à
carga.
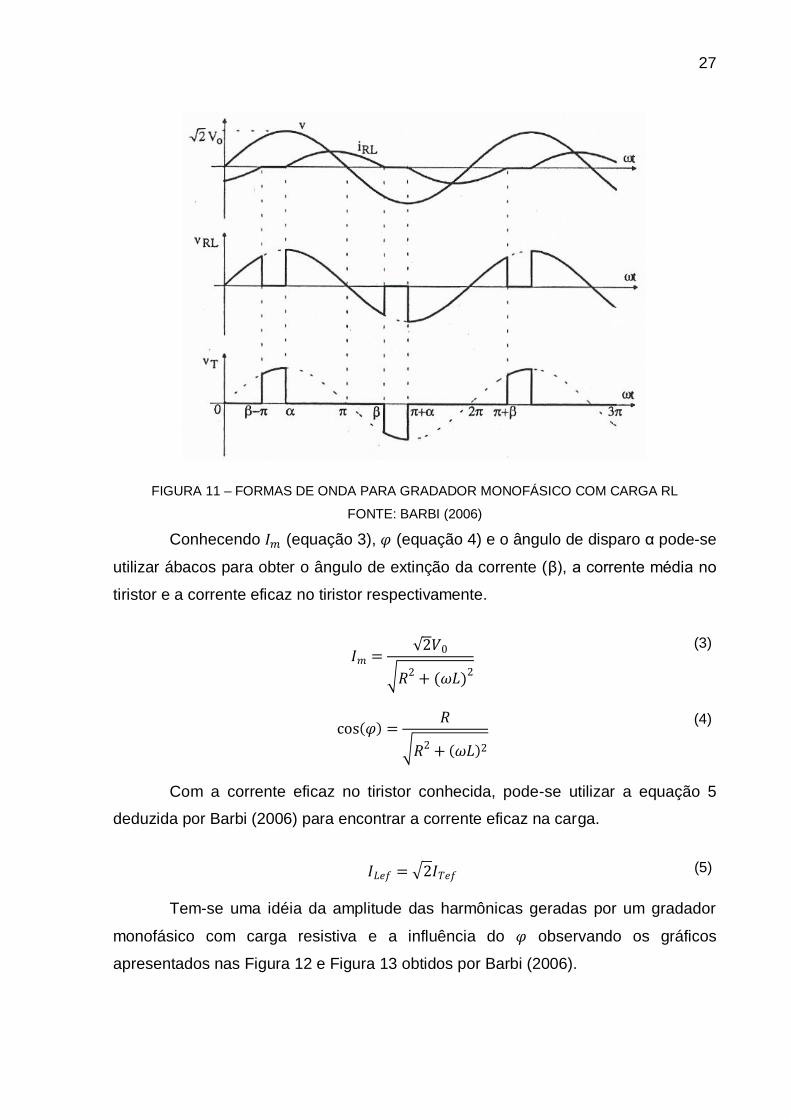
O gradador monofásico de carga RL da Figura 10 apresenta na carga as
formas de onda apresentadas na Figura 11.
FIGURA 10 – GRADADOR MONOFÁSICO COM CARGA RL
FONTE: BARBI (2006)
27
FIGURA 11 – FORMAS DE ONDA PARA GRADADOR MONOFÁSICO COM CARGA RL
FONTE: BARBI (2006)
Conhecendo (equação 3), (equação 4) e o ângulo de disparo α pode-se
utilizar ábacos para obter o ângulo de extinção da corrente (β), a corrente média no
tiristor e a corrente eficaz no tiristor respectivamente.
√
√ ( )
(3)
( )
√ ( )
(4)
Com a corrente eficaz no tiristor conhecida, pode-se utilizar a equação 5
deduzida por Barbi (2006) para encontrar a corrente eficaz na carga.
√ (5)
Tem-se uma idéia da amplitude das harmônicas geradas por um gradador
monofásico com carga resistiva e a influência do observando os gráficos
apresentados nas Figura 12 e Figura 13 obtidos por Barbi (2006).
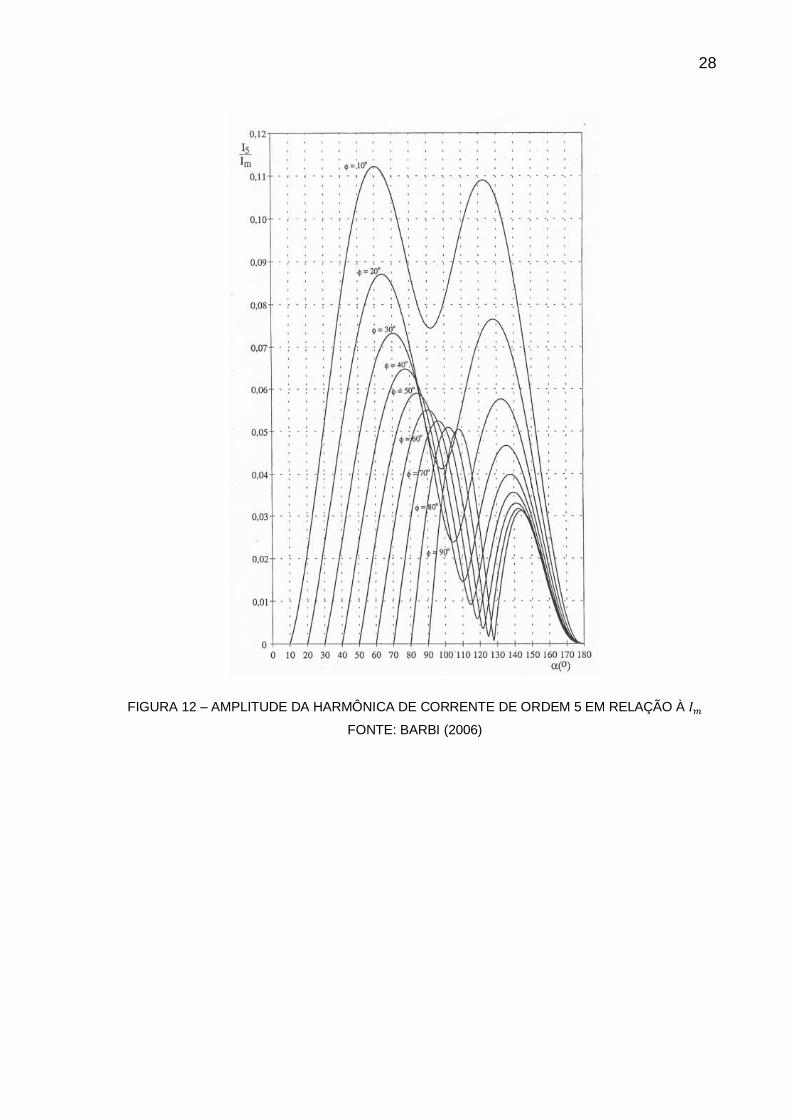
28
FIGURA 12 – AMPLITUDE DA HARMÔNICA DE CORRENTE DE ORDEM 5 EM RELAÇÃO À
FONTE: BARBI (2006)
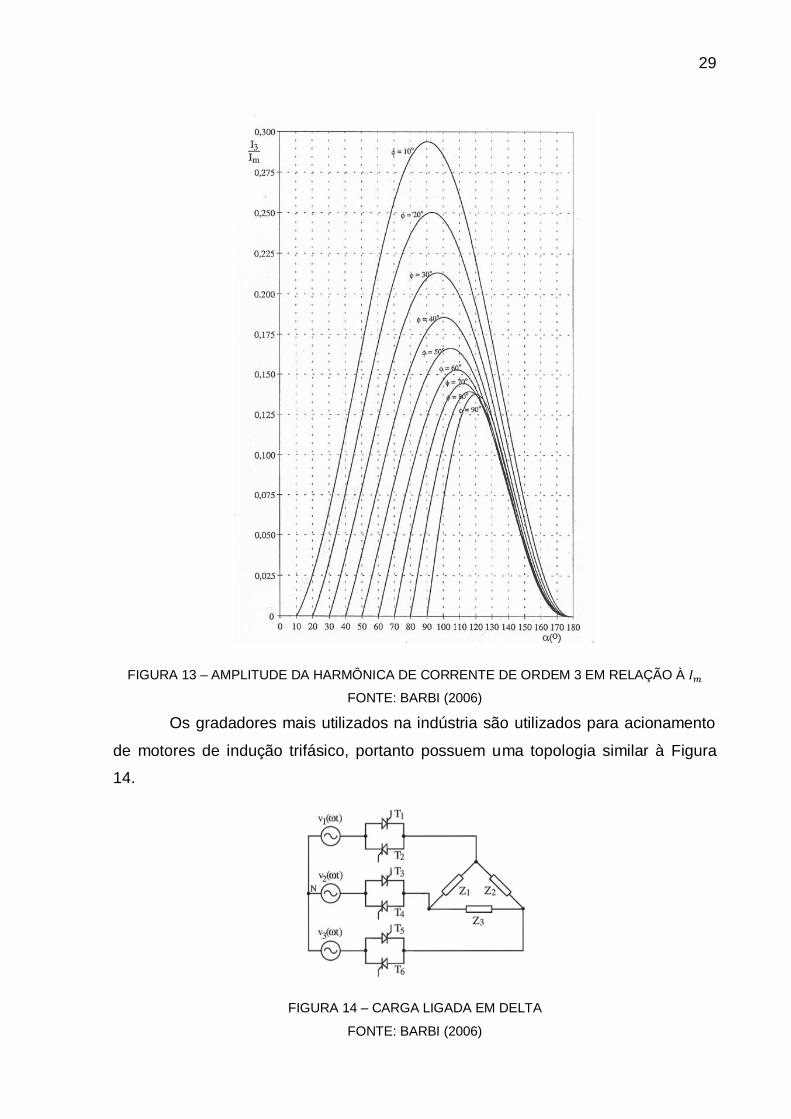
29
FIGURA 13 – AMPLITUDE DA HARMÔNICA DE CORRENTE DE ORDEM 3 EM RELAÇÃO À
FONTE: BARBI (2006)
Os gradadores mais utilizados na indústria são utilizados para acionamento
de motores de indução trifásico, portanto possuem uma topologia similar à Figura
14.
FIGURA 14 – CARGA LIGADA EM DELTA
FONTE: BARBI (2006)
30
2.1.2.2. Principio de funcionamento do Inversor de frequência
O inversor de frequência é um equipamento eletrônico ativo responsável por
acionar uma carga fornecendo tensão e frequência variável. Este equipamento é
composto de três blocos principais: Retificador CA/CC; Barramento CC e Inversor
CC/CA;
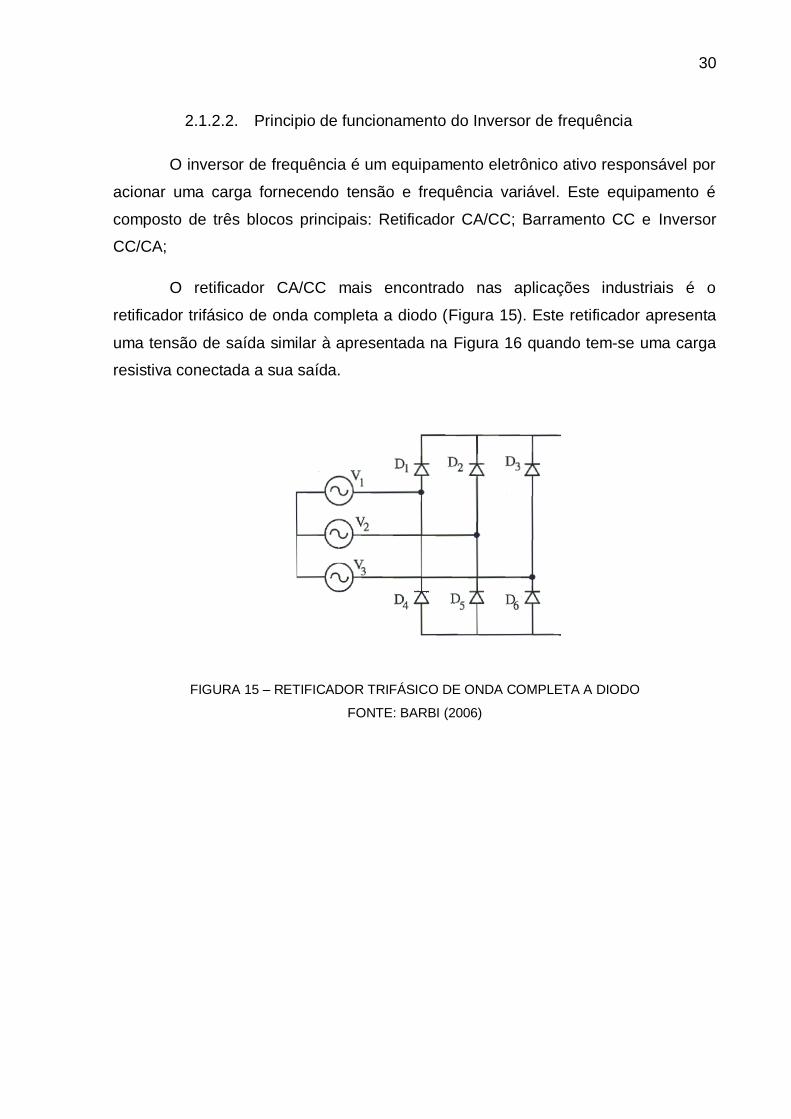
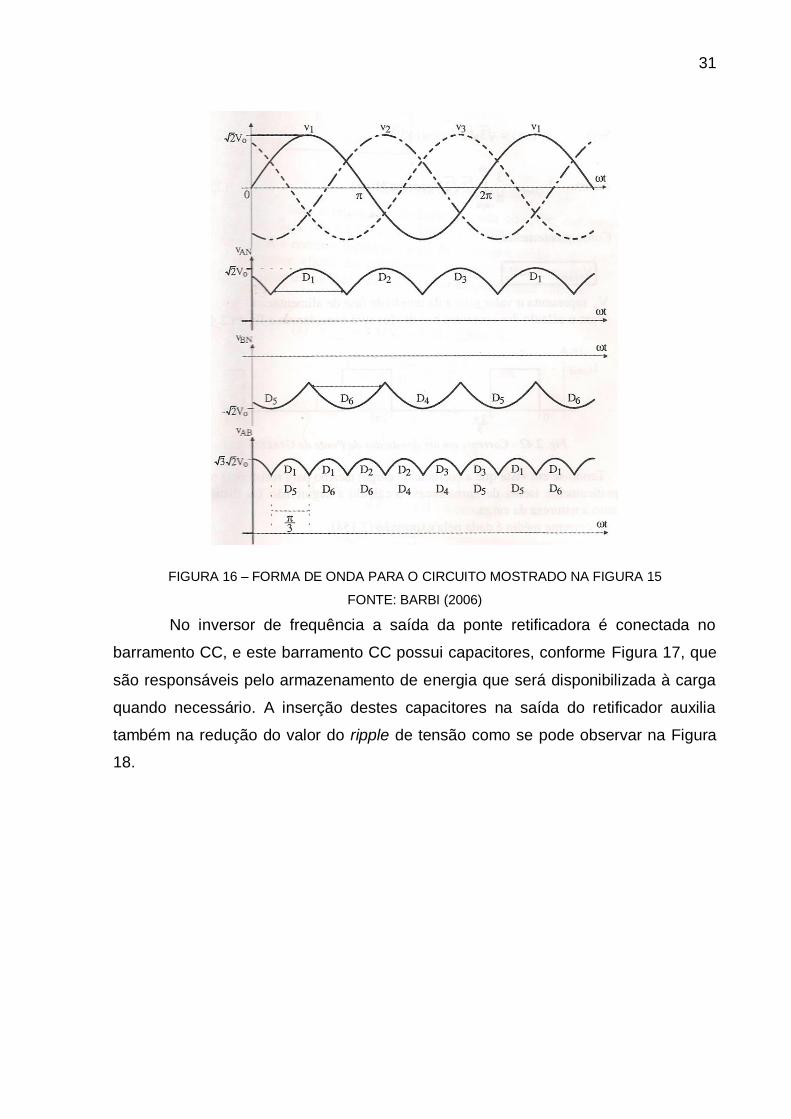
O retificador CA/CC mais encontrado nas aplicações industriais é o
retificador trifásico de onda completa a diodo (Figura 15). Este retificador apresenta
uma tensão de saída similar à apresentada na Figura 16 quando tem-se uma carga
resistiva conectada a sua saída.
FIGURA 15 – RETIFICADOR TRIFÁSICO DE ONDA COMPLETA A DIODO
FONTE: BARBI (2006)
31
FIGURA 16 – FORMA DE ONDA PARA O CIRCUITO MOSTRADO NA FIGURA 15
FONTE: BARBI (2006)
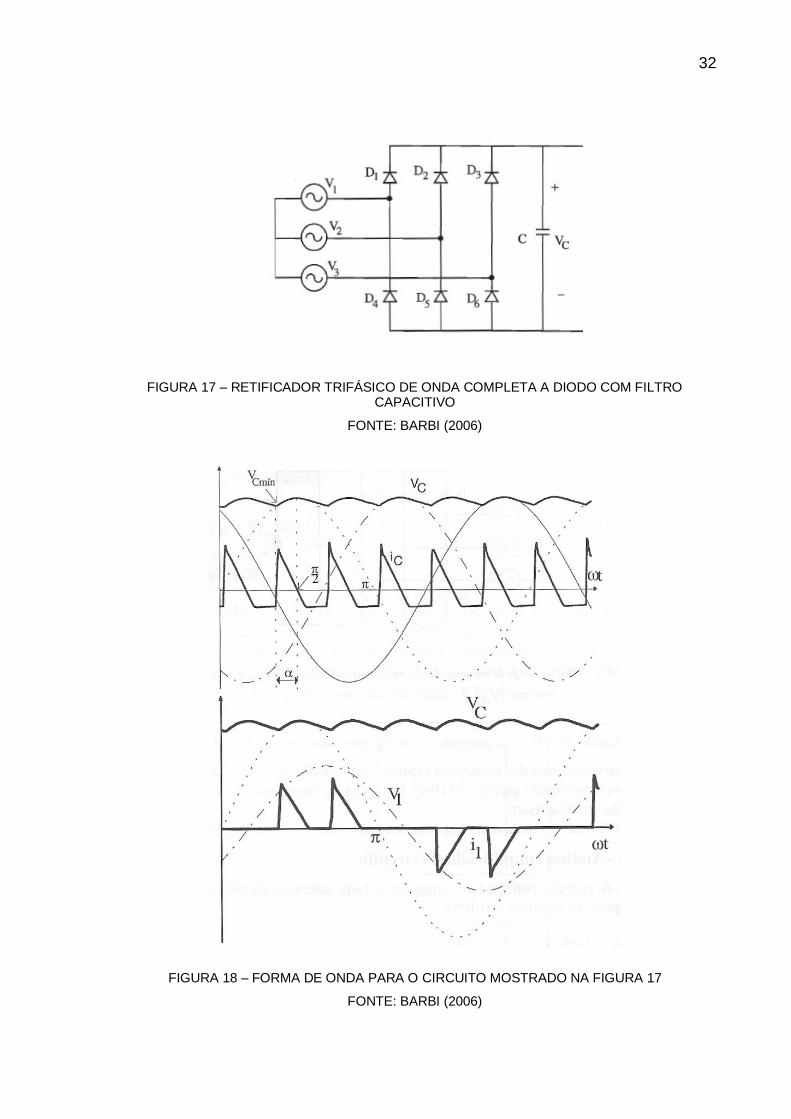
No inversor de frequência a saída da ponte retificadora é conectada no
barramento CC, e este barramento CC possui capacitores, conforme Figura 17, que
são responsáveis pelo armazenamento de energia que será disponibilizada à carga
quando necessário. A inserção destes capacitores na saída do retificador auxilia
também na redução do valor do ripple de tensão como se pode observar na Figura
18.
32
FIGURA 17 – RETIFICADOR TRIFÁSICO DE ONDA COMPLETA A DIODO COM FILTRO CAPACITIVO
FONTE: BARBI (2006)
FIGURA 18 – FORMA DE ONDA PARA O CIRCUITO MOSTRADO NA FIGURA 17
FONTE: BARBI (2006)
33
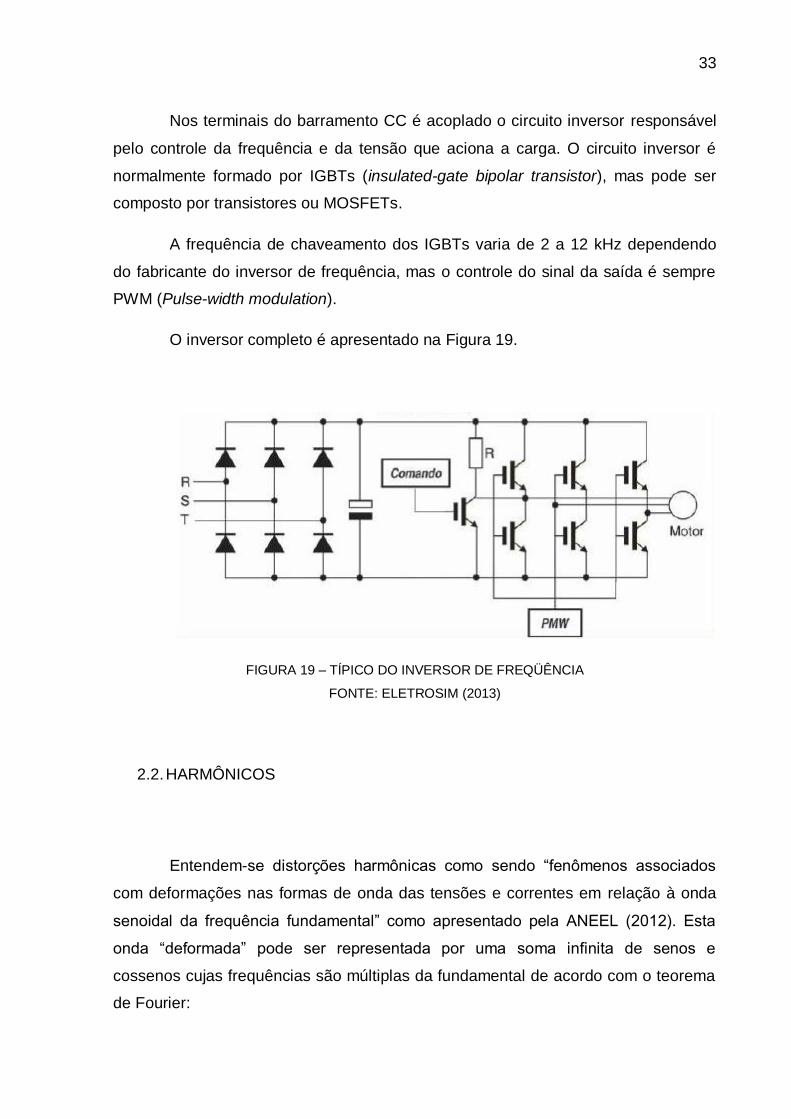
Nos terminais do barramento CC é acoplado o circuito inversor responsável
pelo controle da frequência e da tensão que aciona a carga. O circuito inversor é
normalmente formado por IGBTs (insulated-gate bipolar transistor), mas pode ser
composto por transistores ou MOSFETs.
A frequência de chaveamento dos IGBTs varia de 2 a 12 kHz dependendo
do fabricante do inversor de frequência, mas o controle do sinal da saída é sempre
PWM (Pulse-width modulation).
O inversor completo é apresentado na Figura 19.
FIGURA 19 – TÍPICO DO INVERSOR DE FREQÜÊNCIA
FONTE: ELETROSIM (2013)
2.2. HARMÔNICOS
Entendem-se distorções harmônicas como sendo “fenômenos associados
com deformações nas formas de onda das tensões e correntes em relação à onda
senoidal da frequência fundamental” como apresentado pela ANEEL (2012). Esta
onda “deformada” pode ser representada por uma soma infinita de senos e
cossenos cujas frequências são múltiplas da fundamental de acordo com o teorema
de Fourier:
34
( ) ∑[ ( ) ( )]
(6)
Onde:
é a freqüência fundamental da onda periódica;
é o valor médio da função;
e são as amplitudes em cosseno e seno das harmônicas de ordem .
2.2.1. Definições e terminologia
Faz-se necessário ainda, definir alguns termos muito utilizados na análise de
ruído harmônico, descritos abaixo.
A taxa de distorção harmônica total vem do inglês Total Harmonic Distortion
(THD) e representa a relação quadrática da soma de todos os componentes
harmônicos presentes no sinal em relação à componente fundamental deste sinal. É
expressa pela equação 7 abaixo:
( ) √
∑
(7)
A distorção pode ser medida em relação à corrente (THDi) ou à tensão
(THDv).
A taxa de distorção harmônica total de tensão, calculado pela equação 8
indica o quanto o sinal de tensão está sendo distorcido pelas componentes
harmônicas, quanto menor o THDv de um sinal, mais semelhante ele está de uma
onda senoidal pura.
A IEEE 519 recomenda limites de THDv no PAC conforme apresentado na
Tabela 1.
35
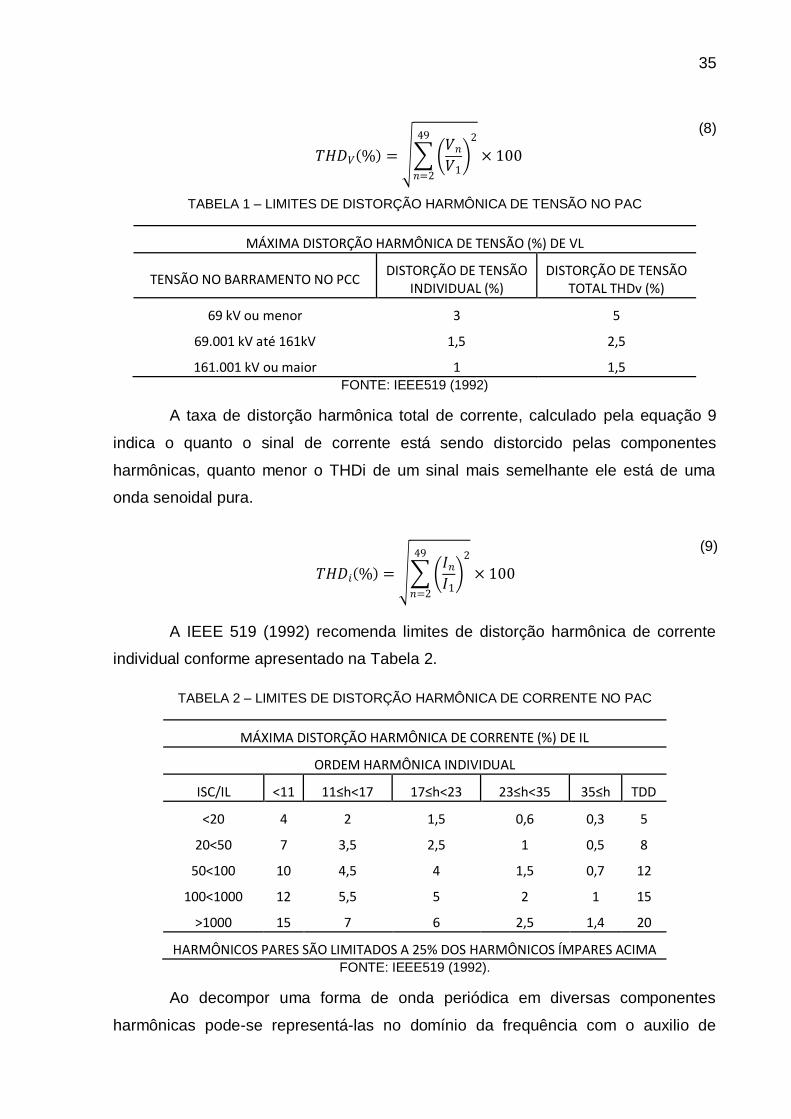
( ) √∑( )
(8)
TABELA 1 – LIMITES DE DISTORÇÃO HARMÔNICA DE TENSÃO NO PAC
MÁXIMA DISTORÇÃO HARMÔNICA DE TENSÃO (%) DE VL
TENSÃO NO BARRAMENTO NO PCC DISTORÇÃO DE TENSÃO
INDIVIDUAL (%) DISTORÇÃO DE TENSÃO
TOTAL THDv (%)
69 kV ou menor 3 5
69.001 kV até 161kV 1,5 2,5
161.001 kV ou maior 1 1,5 FONTE: IEEE519 (1992)
A taxa de distorção harmônica total de corrente, calculado pela equação 9
indica o quanto o sinal de corrente está sendo distorcido pelas componentes
harmônicas, quanto menor o THDi de um sinal mais semelhante ele está de uma
onda senoidal pura.
( ) √∑( )
(9)
A IEEE 519 (1992) recomenda limites de distorção harmônica de corrente
individual conforme apresentado na Tabela 2.
TABELA 2 – LIMITES DE DISTORÇÃO HARMÔNICA DE CORRENTE NO PAC
MÁXIMA DISTORÇÃO HARMÔNICA DE CORRENTE (%) DE IL
ORDEM HARMÔNICA INDIVIDUAL
ISC/IL <11 11≤h<17 17≤h<23 23≤h<35 35≤h TDD
<20 4 2 1,5 0,6 0,3 5
20<50 7 3,5 2,5 1 0,5 8
50<100 10 4,5 4 1,5 0,7 12
100<1000 12 5,5 5 2 1 15
>1000 15 7 6 2,5 1,4 20
HARMÔNICOS PARES SÃO LIMITADOS A 25% DOS HARMÔNICOS ÍMPARES ACIMA FONTE: IEEE519 (1992).
Ao decompor uma forma de onda periódica em diversas componentes
harmônicas pode-se representá-las no domínio da frequência com o auxilio de
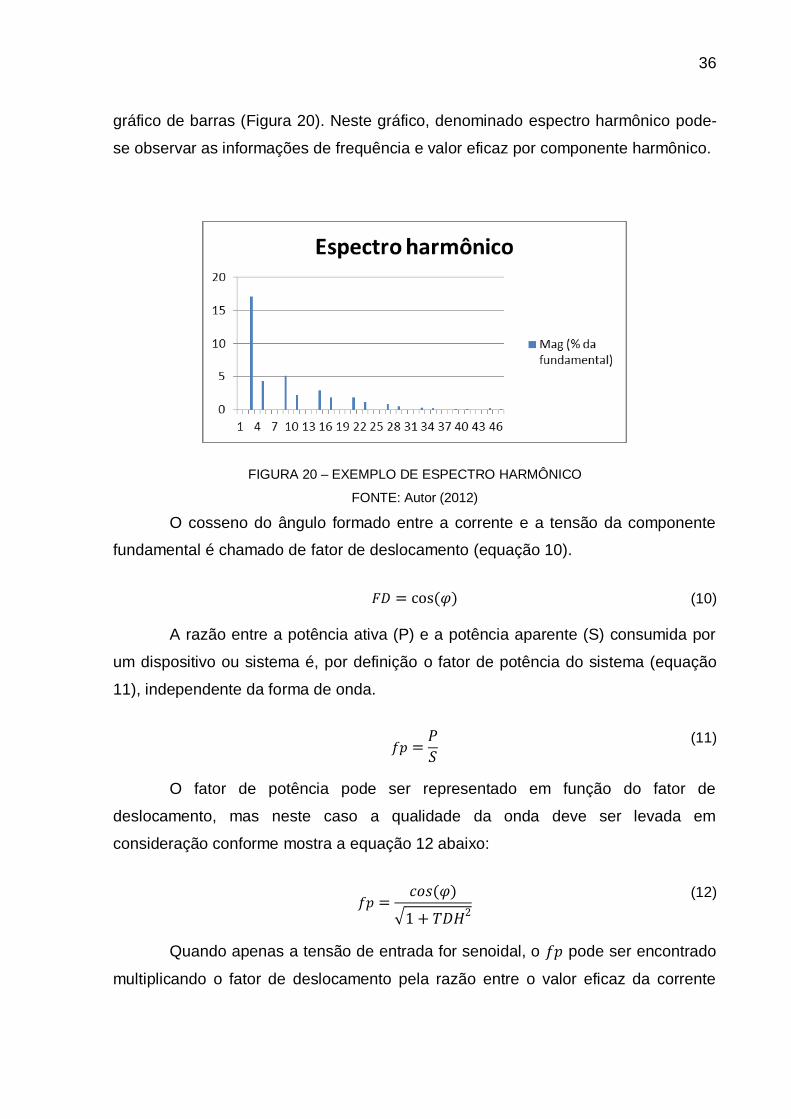
36
gráfico de barras (Figura 20). Neste gráfico, denominado espectro harmônico pode-
se observar as informações de frequência e valor eficaz por componente harmônico.
FIGURA 20 – EXEMPLO DE ESPECTRO HARMÔNICO
FONTE: Autor (2012)
O cosseno do ângulo formado entre a corrente e a tensão da componente
fundamental é chamado de fator de deslocamento (equação 10).
( ) (10)
A razão entre a potência ativa (P) e a potência aparente (S) consumida por
um dispositivo ou sistema é, por definição o fator de potência do sistema (equação
11), independente da forma de onda.
(11)
O fator de potência pode ser representado em função do fator de
deslocamento, mas neste caso a qualidade da onda deve ser levada em
consideração conforme mostra a equação 12 abaixo:
( )
√
(12)
Quando apenas a tensão de entrada for senoidal, o pode ser encontrado
multiplicando o fator de deslocamento pela razão entre o valor eficaz da corrente
37
fundamental e o valor eficaz da corrente total no ponto de medição expresso como
apresentado na equação 13:
( )
(13)
2.2.2. Possíveis fontes de ruídos harmônicos
A presença de formas de onda de tensão e corrente não linear é comum no
sistema elétrico de potência atual. Como comentou Arrillaga et al. (1997), o aumento
da utilização dos dispositivos de estado sólido para controle dos sistemas de
potência excedeu as expectativas e acentuou os problemas dentro e fora destes
sistemas.
Pode-se dividir as fontes de harmônicas em 3 grandes grupos:
Grande número de componentes de pequena potência distribuídos pelo
sistema.
Grandes cargas não lineares que são inseridas no sistema de forma
aleatória.
Conversores de estado sólido utilizados na indústria e em sistemas de
transmissão.
O primeiro grupo consiste principalmente em dispositivos que utilizam ponte
retificadora a diodo monofásica; é o caso das fontes de baixa tensão para aplicações
gerais (ex. computadores, televisores, lâmpadas fluorescentes, etc). Estes
dispositivos quando vistos de forma isolada tem efeito insignificante, porém estes
efeitos acumulados podem ser importantes em função da grande variedade e
quantidade deste tipo de dispositivo inserido em um sistema.
O segundo grupo refere-se a dispositivos como fornos de indução, onde a
potência chega a dezenas de megawatts conectados diretamente as redes de
transmissão de alta tensão e normalmente sem a correta instalação de filtros. Estas
cargas são aleatórias, variáveis e extremamente assimétricas. Neste caso a
dificuldade não está em definir a técnica de simulação, mas nos diferentes valores
38
de corrente harmônica utilizada em cada estudo particular, estes valores deveriam
ser baseados em análise estocástica de várias informações experimentais obtidas
através da medição de instalações similares à existente (ARRILLAGA et al., 1997).
Outro grande representante deste grupo são os transformadores de potência que
durante a energização descarregam na rede grandes níveis de distorção harmônico
de índice múltiplo de 3 (3°, 6°, 9°, ...).
Tanto na instalação como na simulação é o terceiro tipo de carga que
causam os maiores problemas. Em parte devido ao grande número de aplicações
para este tipo de conversores, parte devido aos diferentes tipos de controle de
chaveamento de onda que estes dispositivos podem trabalhar. A operação do
conversor é intimamente ligada à qualidade da energia do sistema que ele está
inserido, portanto os processos que possuem conversores estáticos de potência
merecem atenção especial na simulação de harmônicos do sistema de potência.
No capítulo 2 foram expostas as principais fontes geradoras de ruídos no
ambiente industrial. No próximo capítulo serão abordados os principais tipos de
filtros que podem minimizar a propagação dos ruídos gerados pelos componentes
citados neste capítulo.
2.3. ALGORITMOS GENÉTICOS
No ano de 1975 John Holland apresentou o primeiro trabalho conhecido
envolvendo algoritmos genéticos (AGs). Esse algoritmo ficou conhecido como
algoritmo genético canônico. O AG utiliza um conjunto inicial de soluções geradas de
maneira aleatória que é chamado de população. Os processos naturais de seleção,
reprodução e mutação são aplicados nos indivíduos de uma população e com isto é
realizada a evolução natural. Cada indivíduo gerado recebe uma avaliação de sua
aptidão (fitness) que nada mais é do que uma quantificação da sua qualidade para a
resolução do problema em questão. Os operadores genéticos utilizados, como
recombinação (crossover) e mutação atuarão de forma a permitir a sobrevivência
dos mais aptos, ou seja, aqueles que melhor resolvem o problema (Figura 21).
39
Os indivíduos de uma população são representados por um conjunto de
cromossomos, que são geralmente codificados na forma de listas de atributos, esta
lista serve para transformar um resultado numérico do AG para uma solução real e
tangível do ponto de vista do problema. Cada indivíduo representa uma solução para
o problema em questão, onde cada cromossomo influencia de forma positiva ou
negativa para esta solução.
A função de avaliação ou fitness, também conhecida como função objetivo
ou de custo determina a qualidade do indivíduo enquanto solução para o problema.
Essa função é responsável por identificar todas as restrições e objetivos específicos
de cada problema e relacioná-la a parte genérica do AG. A função objetivo fornece a
medida de desempenho de um indivíduo. A aptidão ou fitness deste indivíduo é
comparada com a aptidão de outros indivíduos, onde a quantidade de comparações
é definida pelo tamanho da população. A função aptidão pode ser igual à função
objetivo, ou resultado do escalonamento da função objetivo, ou então baseada no
ranking do indivíduo em sua população.
Os operadores genéticos tem a finalidade de perturbar o sistema e possuem
a função de buscar regiões desconhecidas e sair de falsos mínimos. Esses
operadores são a recombinação (crossover) e a mutação. Estes operadores ocorrem
no algoritmo genético se baseando em taxas de probabilidade percentual de
ocorrência. A recombinação consegue encontrar novas soluções através da troca de
informações codificadas no indivíduo. A recombinação permite criar novos indivíduos
(filhos) a partir daqueles já existentes (pais), os filhos podem herdar de seus pais os
melhores atributos. Após a recombinação, é aplicado um operador genético de
mutação que altera algumas informações codificadas no indivíduo, o que permite
incorporar maior diversidade à população. Isso faz com que a população não fique
presa em determinados pontos dentro de um espaço de busca por soluções.
Após a recombinação e a mutação ocorre a seleção. O método de seleção
deve simular o mecanismo de seleção natural que atua sobre as espécies
biológicas, ou seja, os pais melhor adaptados geram mais filhos, mas os pais menos
aptos também geram descendentes para que a população não tenha somente
indivíduos semelhantes, sem alguma característica que no futuro possa vir a ser
importante.
40
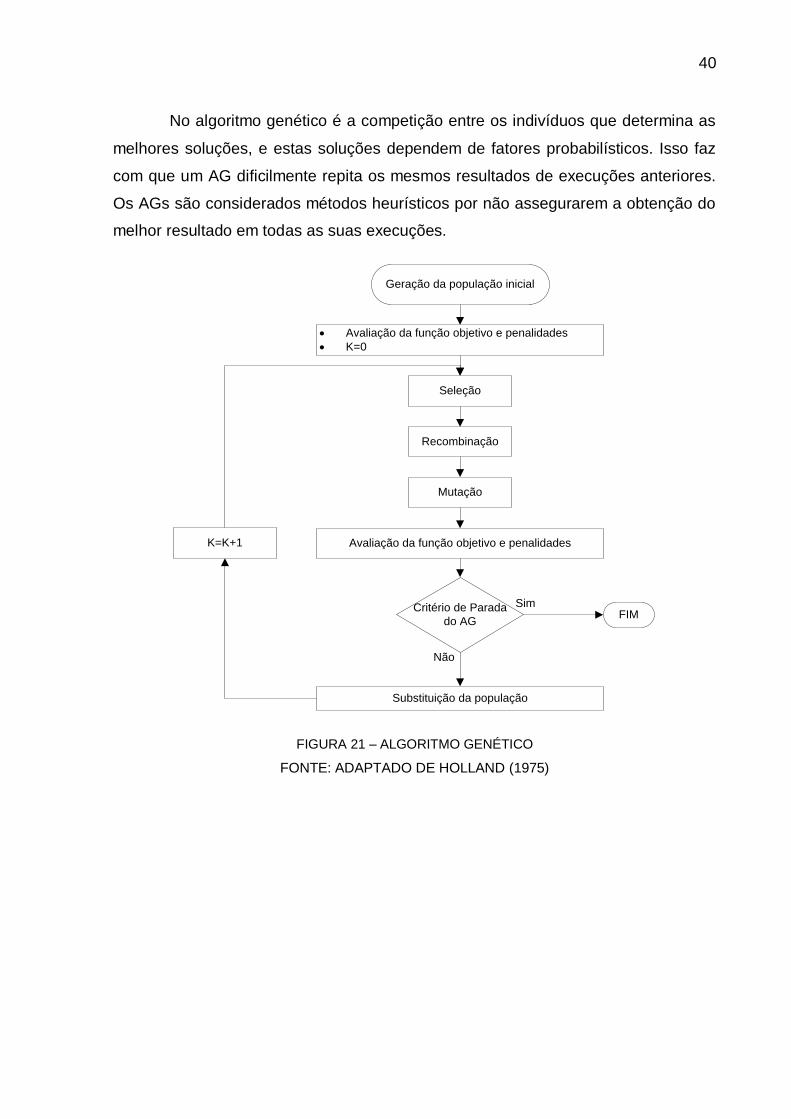
No algoritmo genético é a competição entre os indivíduos que determina as
melhores soluções, e estas soluções dependem de fatores probabilísticos. Isso faz
com que um AG dificilmente repita os mesmos resultados de execuções anteriores.
Os AGs são considerados métodos heurísticos por não assegurarem a obtenção do
melhor resultado em todas as suas execuções.
Geração da população inicial
Avaliação da função objetivo e penalidades
K=0
Mutação
Avaliação da função objetivo e penalidades
Substituição da população
K=K+1
Recombinação
Seleção
Critério de Parada
do AG
Não
SimFIM
FIGURA 21 – ALGORITMO GENÉTICO
FONTE: ADAPTADO DE HOLLAND (1975)
41
3. REVISÃO BIBLIOGRÁFICA
Este capítulo faz uma revisão dos principais tipos de filtros que auxiliam a
eliminação ou redução das harmônicas de corrente presentes no sistema elétrico
industrial.
Conforme Nassif e Xu (2007) a principal prática para reduzir os efeitos das
harmônicas nas redes é a instalação de filtros passivos, pois estes apresentam a
melhor relação custo-benefício, principalmente em média e alta tensão (acima de 10
kV). Bancos de filtros passivos instalados em média tensão são capazes de prover
de forma satisfatória a redução das distorções de tensão e corrente. Para Gallego,
Naranjo e Porras (2003) a melhor forma de reduzir as harmônicas é trabalhar de
forma hierarquizada, primeiro resolvendo o problema de injeção de harmônica por
parte do usuário do sistema (projetando filtros no lado de baixa tensão e utilizando o
transformador como barreira), e depois buscando reduzir as perdas e mantendo os
níveis de harmônicas dentro dos limites, neste caso projetando os bancos de
capacitores, filtros passivos ou filtros ativos para este fim.
Pode-se classificar os filtros pelo seu grau de sintonia, pela forma de
conexão ao sistema, pela sua localização e a quantidade de frequências de
ressonância.
3.1. FILTROS PASSIVOS
O filtro passivo tem como principal finalidade reduzir os picos de corrente
e/ou tensão harmônica em um determinado ponto do sistema, de acordo com o
propósito específico de cada filtro ele pode ser em série ou em paralelo, pode ser
sintonizado numa frequência específica ou numa faixa de frequência, ou pode ser
projetado para trabalhar como um filtro passa-alta ou passa-baixa. Este tipo de filtro
é composto por componentes passivos: indutor, capacitor e resistor. O custo do filtro
42
chega à cerca de 1% do custo da carga instalada, este é um valor elevado e justifica
uma análise criteriosa no dimensionamento do filtro.
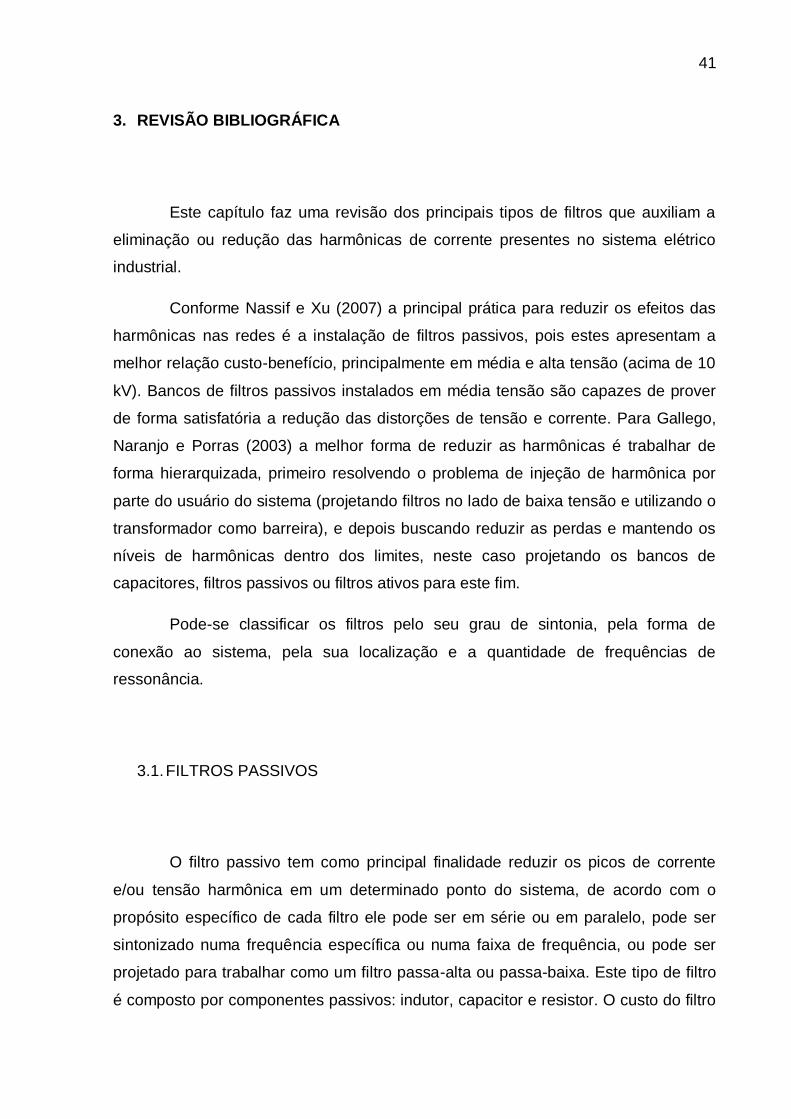
3.1.1. Filtro passivo em série
O filtro passivo em série é formado pelo paralelo de um indutor e um
capacitor colocado em série com a carga. Este tipo se apresenta como uma alta
impedância para uma determinada frequência harmônica.
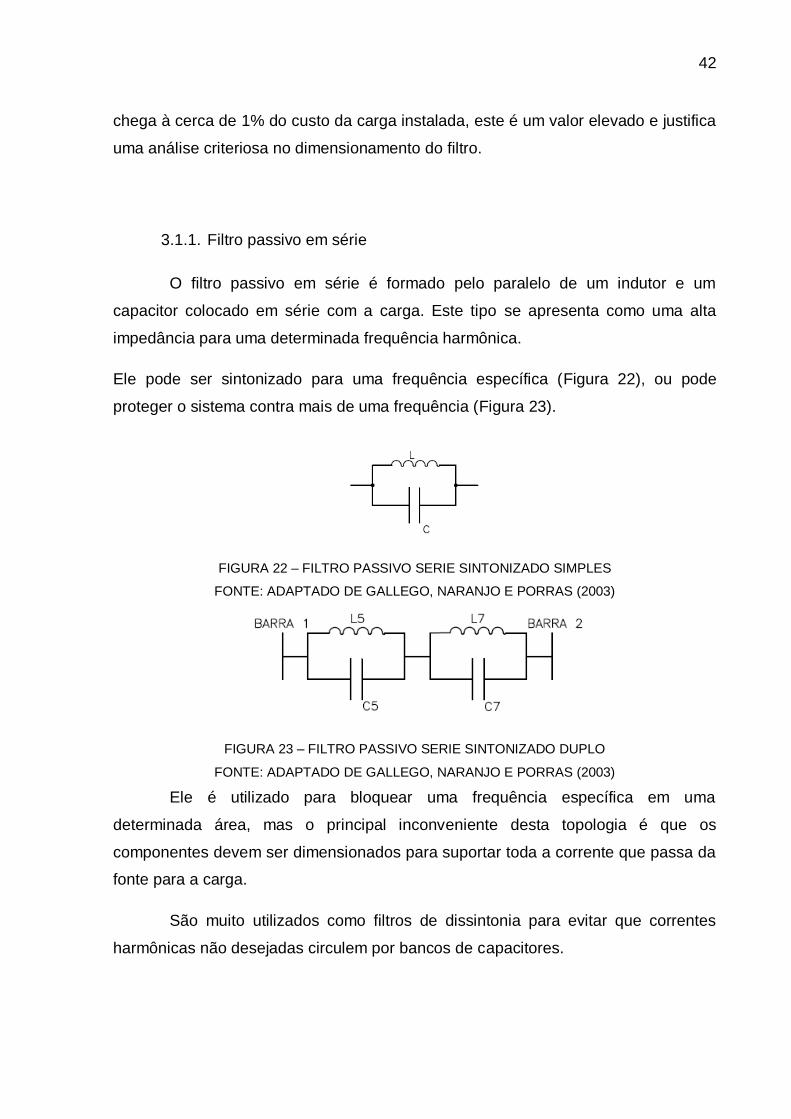
Ele pode ser sintonizado para uma frequência específica (Figura 22), ou pode
proteger o sistema contra mais de uma frequência (Figura 23).
FIGURA 22 – FILTRO PASSIVO SERIE SINTONIZADO SIMPLES
FONTE: ADAPTADO DE GALLEGO, NARANJO E PORRAS (2003)
FIGURA 23 – FILTRO PASSIVO SERIE SINTONIZADO DUPLO
FONTE: ADAPTADO DE GALLEGO, NARANJO E PORRAS (2003)
Ele é utilizado para bloquear uma frequência específica em uma
determinada área, mas o principal inconveniente desta topologia é que os
componentes devem ser dimensionados para suportar toda a corrente que passa da
fonte para a carga.
São muito utilizados como filtros de dissintonia para evitar que correntes
harmônicas não desejadas circulem por bancos de capacitores.
43
3.1.2. Filtro passivo paralelo
O filtro passivo paralelo ou shunt proporciona um caminho de baixa
impedância para frequência harmônica, é um ramo RLC em paralelo com a fonte
que possui a frequência ressonante igual à frequência harmônica que se pretende
eliminar. Segundo Gallego, Naranjo e Porras (2003) este tipo de filtro é mais
econômico porque conduz apenas as correntes harmônicas que foram sintonizadas
e não a potência total da carga. Outra característica do filtro shunt é que este supre
a potência reativa que o sistema necessita enquanto o filtro série a consome.
Existe uma grande variedade de filtros paralelos passivos, dentre eles pode-
se destacar:
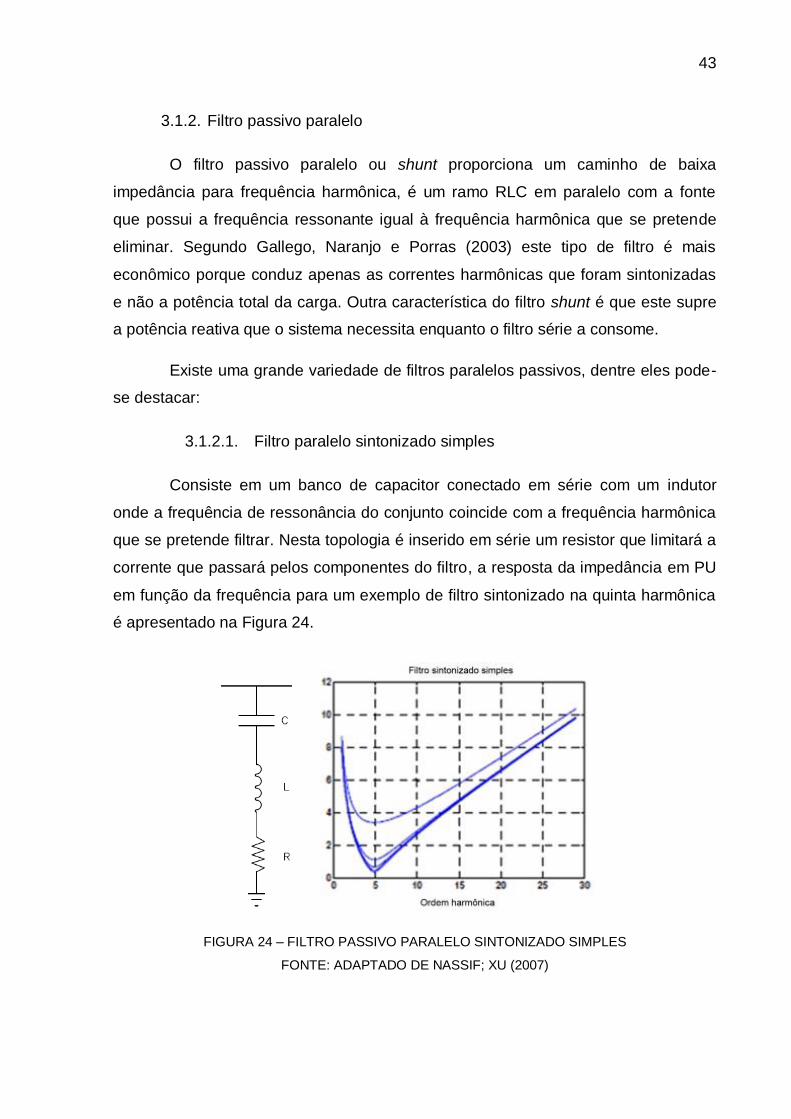
3.1.2.1. Filtro paralelo sintonizado simples
Consiste em um banco de capacitor conectado em série com um indutor
onde a frequência de ressonância do conjunto coincide com a frequência harmônica
que se pretende filtrar. Nesta topologia é inserido em série um resistor que limitará a
corrente que passará pelos componentes do filtro, a resposta da impedância em PU
em função da frequência para um exemplo de filtro sintonizado na quinta harmônica
é apresentado na Figura 24.
FIGURA 24 – FILTRO PASSIVO PARALELO SINTONIZADO SIMPLES
FONTE: ADAPTADO DE NASSIF; XU (2007)
44
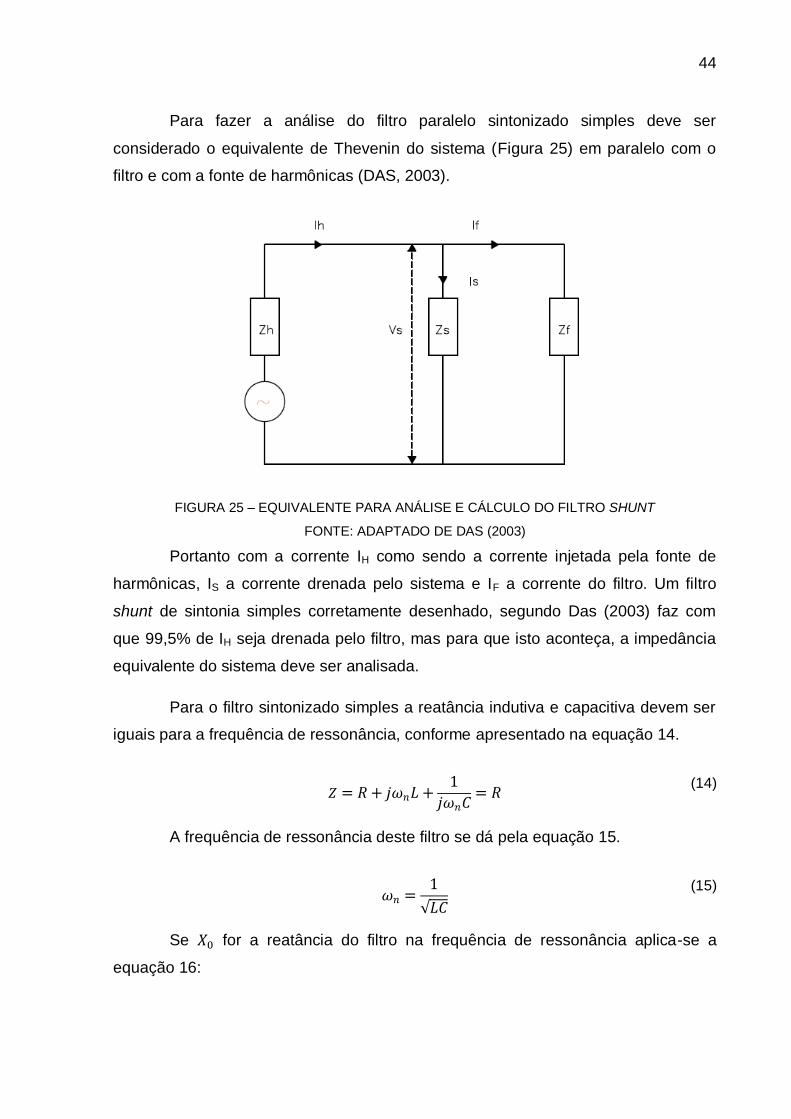
Para fazer a análise do filtro paralelo sintonizado simples deve ser
considerado o equivalente de Thevenin do sistema (Figura 25) em paralelo com o
filtro e com a fonte de harmônicas (DAS, 2003).
FIGURA 25 – EQUIVALENTE PARA ANÁLISE E CÁLCULO DO FILTRO SHUNT
FONTE: ADAPTADO DE DAS (2003)
Portanto com a corrente IH como sendo a corrente injetada pela fonte de
harmônicas, IS a corrente drenada pelo sistema e IF a corrente do filtro. Um filtro
shunt de sintonia simples corretamente desenhado, segundo Das (2003) faz com
que 99,5% de IH seja drenada pelo filtro, mas para que isto aconteça, a impedância
equivalente do sistema deve ser analisada.
Para o filtro sintonizado simples a reatância indutiva e capacitiva devem ser
iguais para a frequência de ressonância, conforme apresentado na equação 14.
(14)
A frequência de ressonância deste filtro se dá pela equação 15.
√
(15)
Se for a reatância do filtro na frequência de ressonância aplica-se a
equação 16:
45
√
(16)
Conhecendo pode-se definir o fator de qualidade do filtro que determina
quão sintonizado o filtro se comporta, quanto maior o fator de qualidade mais
abrupta é a característica de impedância do filtro.
√ ⁄
(17)
A banda passante do filtro é tida como limite quando | | √ , este é o
ponto onde a reatância e a resistência do filtro são iguais.
A potência reativa capacitiva nos terminais de saída do capacitor pode ser
expressa por
⁄ , ao se considerar o reator no filtro a potência reativa total é
incrementada e pode-se considerar a equação 18 (DAS, 2003):
(18)
Gallego, Naranjo e Porras (2003) orientam o cálculo da reatância capacitiva
XC em função da tensão nominal V e da potência capacitiva reativa QC como
apresentado na equação 19.
| |
(19)
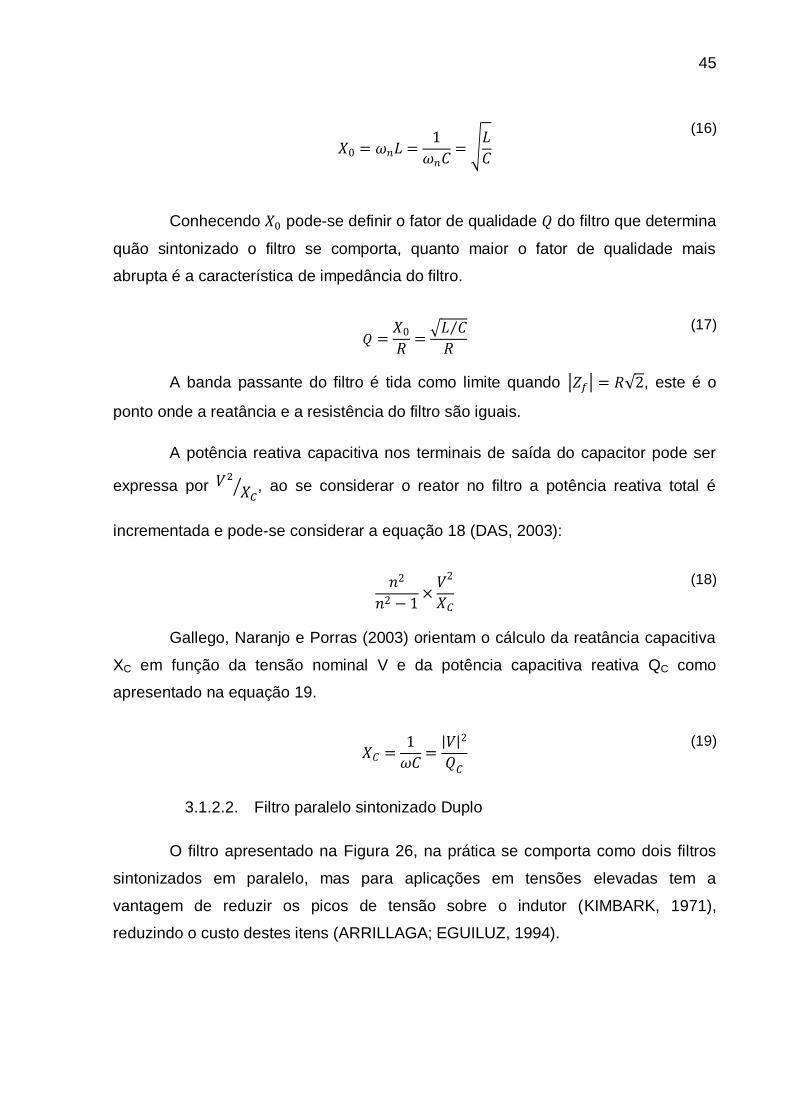
3.1.2.2. Filtro paralelo sintonizado Duplo
O filtro apresentado na Figura 26, na prática se comporta como dois filtros
sintonizados em paralelo, mas para aplicações em tensões elevadas tem a
vantagem de reduzir os picos de tensão sobre o indutor (KIMBARK, 1971),
reduzindo o custo destes itens (ARRILLAGA; EGUILUZ, 1994).
46
FIGURA 26 – FILTRO PASSIVO PARALELO SINTONIZADO DUPLO
FONTE: ADAPTADO DE KIMBARK (1971)
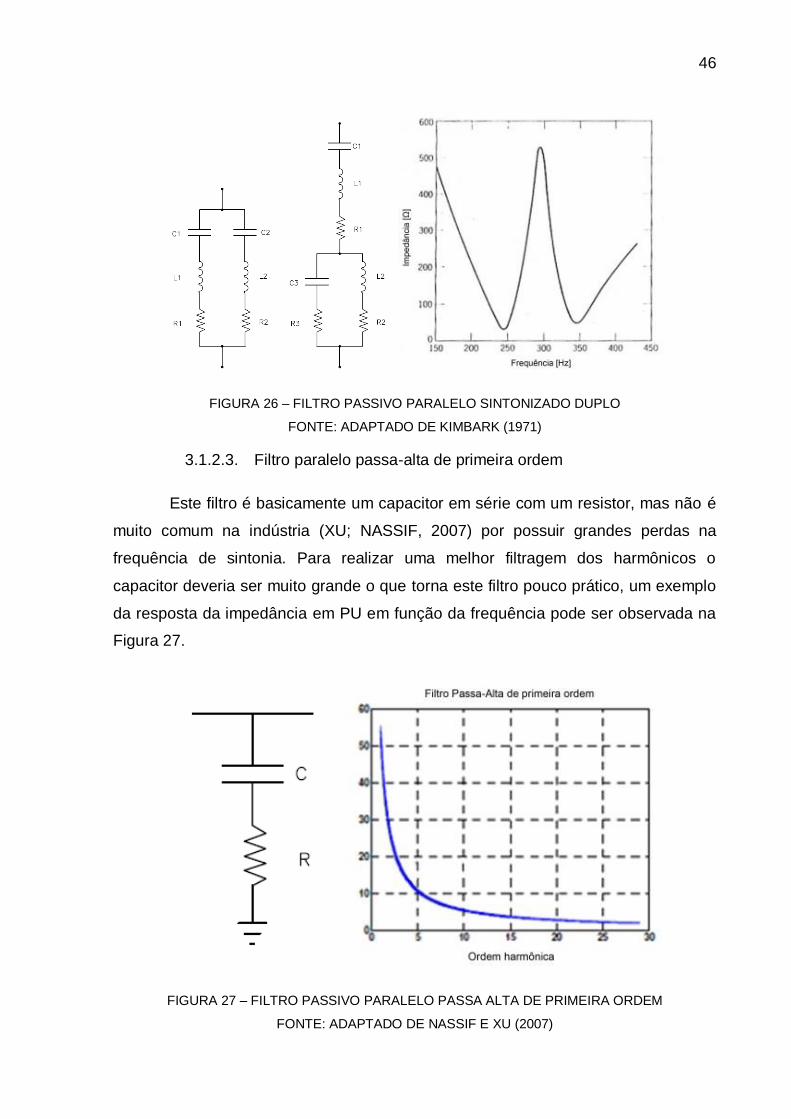
3.1.2.3. Filtro paralelo passa-alta de primeira ordem
Este filtro é basicamente um capacitor em série com um resistor, mas não é
muito comum na indústria (XU; NASSIF, 2007) por possuir grandes perdas na
frequência de sintonia. Para realizar uma melhor filtragem dos harmônicos o
capacitor deveria ser muito grande o que torna este filtro pouco prático, um exemplo
da resposta da impedância em PU em função da frequência pode ser observada na
Figura 27.
FIGURA 27 – FILTRO PASSIVO PARALELO PASSA ALTA DE PRIMEIRA ORDEM
FONTE: ADAPTADO DE NASSIF E XU (2007)
47
Todos os tipos de filtros passa-alta apresentam a característica de filtrar
grandes faixas de frequência sem a necessidade de inserir vários ramos paralelos e
são muito robustos durante uma eventual perda de sintonia quando comparados
com os filtros paralelos sintonizados simples. Mas nestas topologias a frequência de
ressonância paralela irá interagir com a impedância do sistema, as perdas na
resistência e no indutor são significativas e quando se deseja eliminar uma
componente harmônica específica o rendimento do filtro paralelo sintonizado simples
é muito maior como se observa em Gallego, Naranjo e Porras (2003).
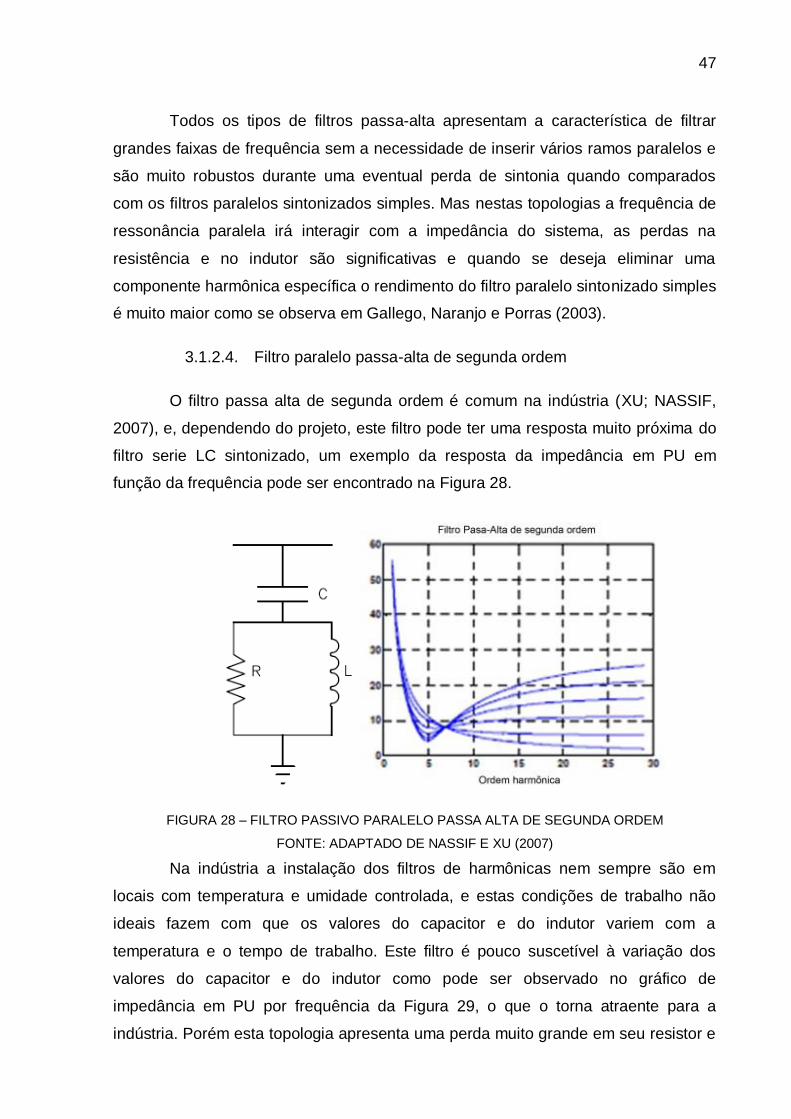
3.1.2.4. Filtro paralelo passa-alta de segunda ordem
O filtro passa alta de segunda ordem é comum na indústria (XU; NASSIF,
2007), e, dependendo do projeto, este filtro pode ter uma resposta muito próxima do
filtro serie LC sintonizado, um exemplo da resposta da impedância em PU em
função da frequência pode ser encontrado na Figura 28.
FIGURA 28 – FILTRO PASSIVO PARALELO PASSA ALTA DE SEGUNDA ORDEM
FONTE: ADAPTADO DE NASSIF E XU (2007)
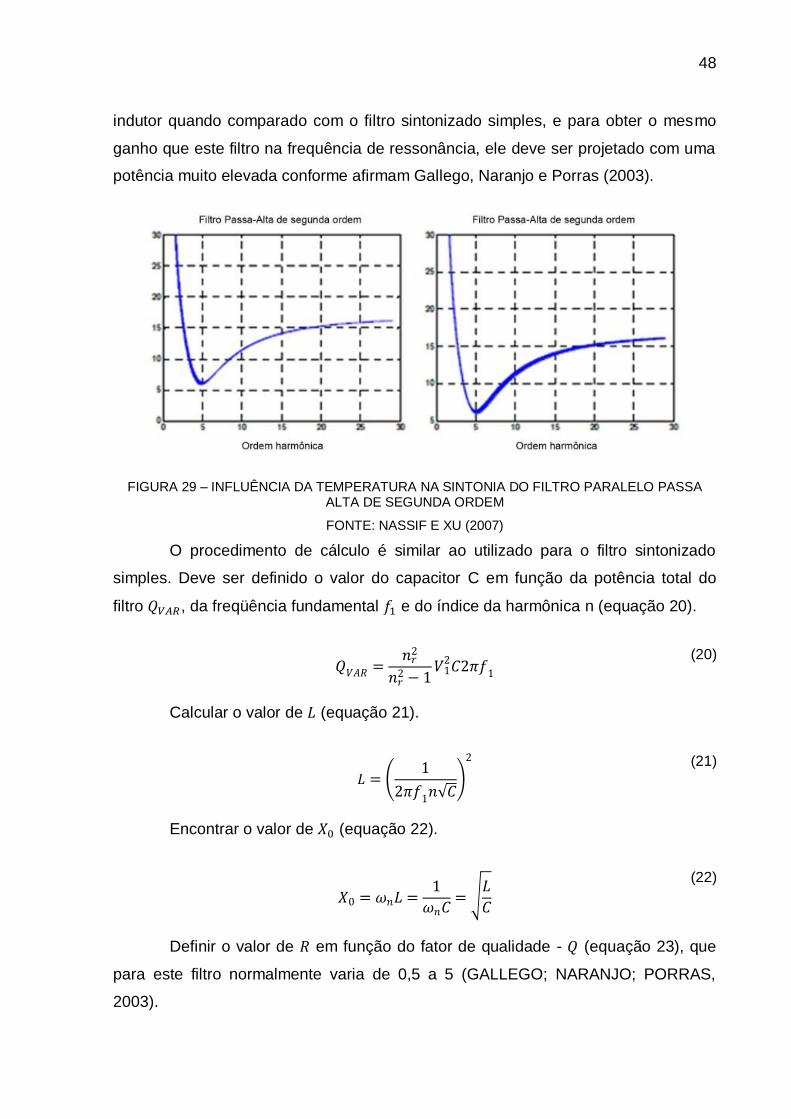
Na indústria a instalação dos filtros de harmônicas nem sempre são em
locais com temperatura e umidade controlada, e estas condições de trabalho não
ideais fazem com que os valores do capacitor e do indutor variem com a
temperatura e o tempo de trabalho. Este filtro é pouco suscetível à variação dos
valores do capacitor e do indutor como pode ser observado no gráfico de
impedância em PU por frequência da Figura 29, o que o torna atraente para a
indústria. Porém esta topologia apresenta uma perda muito grande em seu resistor e
48
indutor quando comparado com o filtro sintonizado simples, e para obter o mesmo
ganho que este filtro na frequência de ressonância, ele deve ser projetado com uma
potência muito elevada conforme afirmam Gallego, Naranjo e Porras (2003).
FIGURA 29 – INFLUÊNCIA DA TEMPERATURA NA SINTONIA DO FILTRO PARALELO PASSA ALTA DE SEGUNDA ORDEM
FONTE: NASSIF E XU (2007)
O procedimento de cálculo é similar ao utilizado para o filtro sintonizado
simples. Deve ser definido o valor do capacitor C em função da potência total do
filtro , da freqüência fundamental e do índice da harmônica n (equação 20).
(20)
Calcular o valor de (equação 21).
(
√
)
(21)
Encontrar o valor de (equação 22).
√
(22)
Definir o valor de em função do fator de qualidade - (equação 23), que
para este filtro normalmente varia de 0,5 a 5 (GALLEGO; NARANJO; PORRAS,
2003).
49
(23)
Para definir a corrente do indutor na frequência fundamental pode-se
considerar que a corrente pelo resistor é zero e, portanto tem-se (DAS, 2003):
[
]
(24)
Na frequência harmônica a corrente é dividida entre o indutor e o resistor e o
valor de corrente do indutor pode ser obtido pela equação 25:
[ ( )
]
⁄
(25)
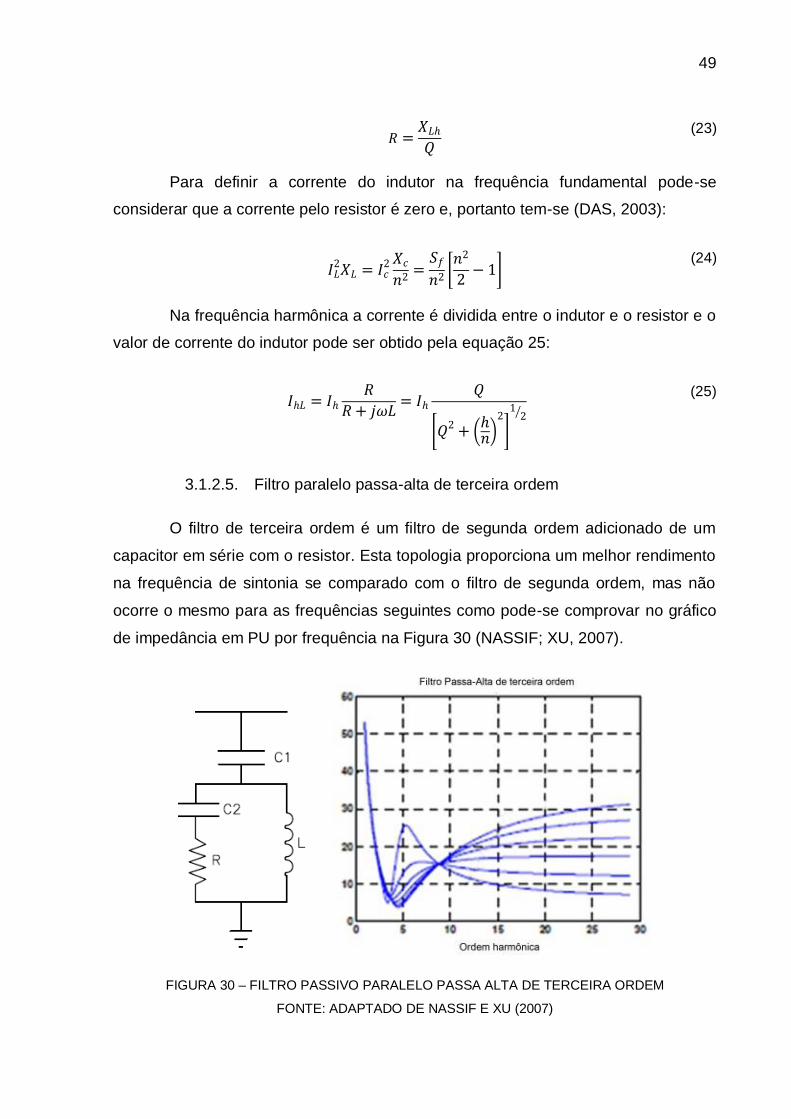
3.1.2.5. Filtro paralelo passa-alta de terceira ordem
O filtro de terceira ordem é um filtro de segunda ordem adicionado de um
capacitor em série com o resistor. Esta topologia proporciona um melhor rendimento
na frequência de sintonia se comparado com o filtro de segunda ordem, mas não
ocorre o mesmo para as frequências seguintes como pode-se comprovar no gráfico
de impedância em PU por frequência na Figura 30 (NASSIF; XU, 2007).
FIGURA 30 – FILTRO PASSIVO PARALELO PASSA ALTA DE TERCEIRA ORDEM
FONTE: ADAPTADO DE NASSIF E XU (2007)
50
Assim como o filtro de segunda ordem este filtro é pouco sensível à variação
do capacitor e do indutor.
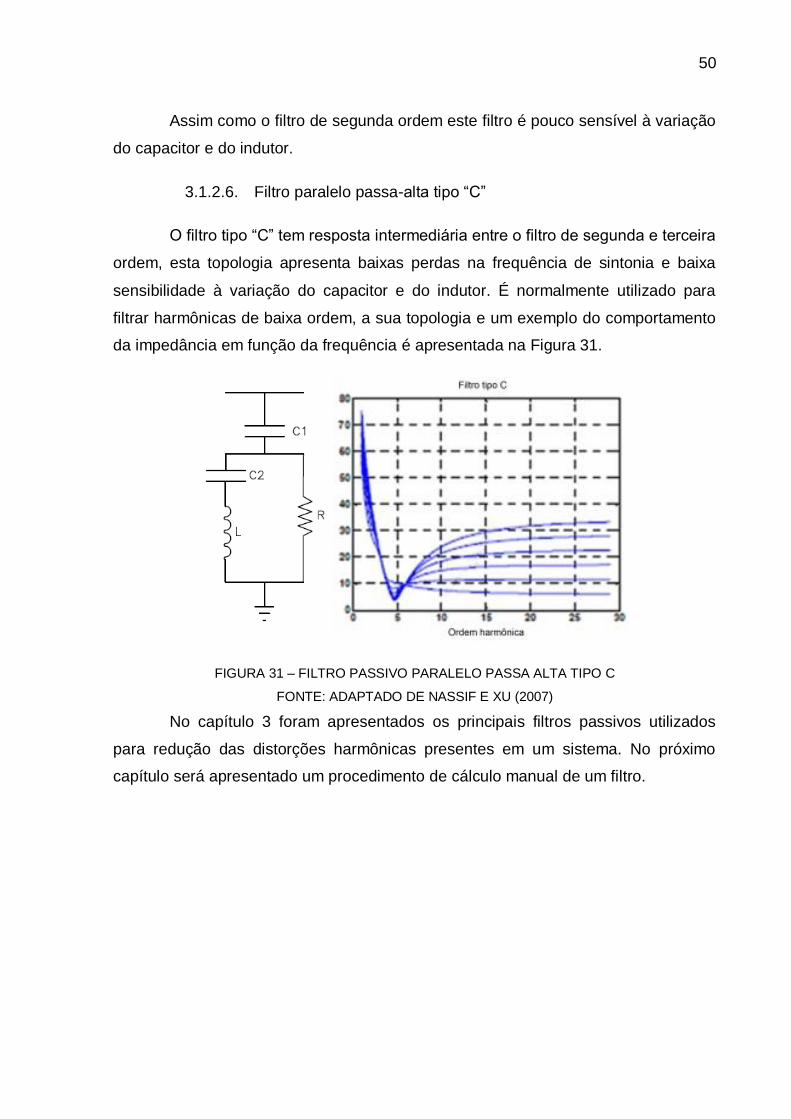
3.1.2.6. Filtro paralelo passa-alta tipo “C”
O filtro tipo “C” tem resposta intermediária entre o filtro de segunda e terceira
ordem, esta topologia apresenta baixas perdas na frequência de sintonia e baixa
sensibilidade à variação do capacitor e do indutor. É normalmente utilizado para
filtrar harmônicas de baixa ordem, a sua topologia e um exemplo do comportamento
da impedância em função da frequência é apresentada na Figura 31.
FIGURA 31 – FILTRO PASSIVO PARALELO PASSA ALTA TIPO C
FONTE: ADAPTADO DE NASSIF E XU (2007)
No capítulo 3 foram apresentados os principais filtros passivos utilizados
para redução das distorções harmônicas presentes em um sistema. No próximo
capítulo será apresentado um procedimento de cálculo manual de um filtro.
51
3.2. PROCEDIMENTO DE CÁLCULO MANUAL DE UM FILTRO PARALELO
SINTONIZADO SIMPLES
Esta seção vai apresentar ao leitor o cálculo manual de um filtro paralelo
sintonizado simples para que se possa entender as dificuldades e limitações que
este tipo de cálculo proporciona.
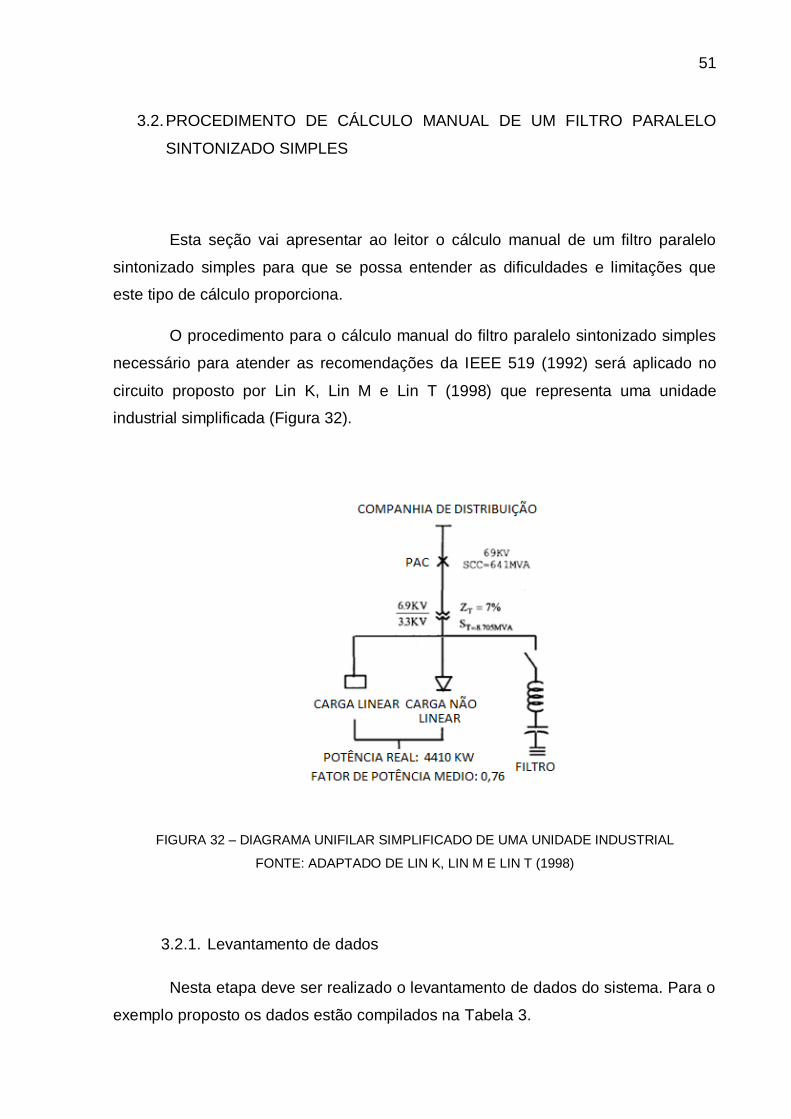
O procedimento para o cálculo manual do filtro paralelo sintonizado simples
necessário para atender as recomendações da IEEE 519 (1992) será aplicado no
circuito proposto por Lin K, Lin M e Lin T (1998) que representa uma unidade
industrial simplificada (Figura 32).
FIGURA 32 – DIAGRAMA UNIFILAR SIMPLIFICADO DE UMA UNIDADE INDUSTRIAL
FONTE: ADAPTADO DE LIN K, LIN M E LIN T (1998)
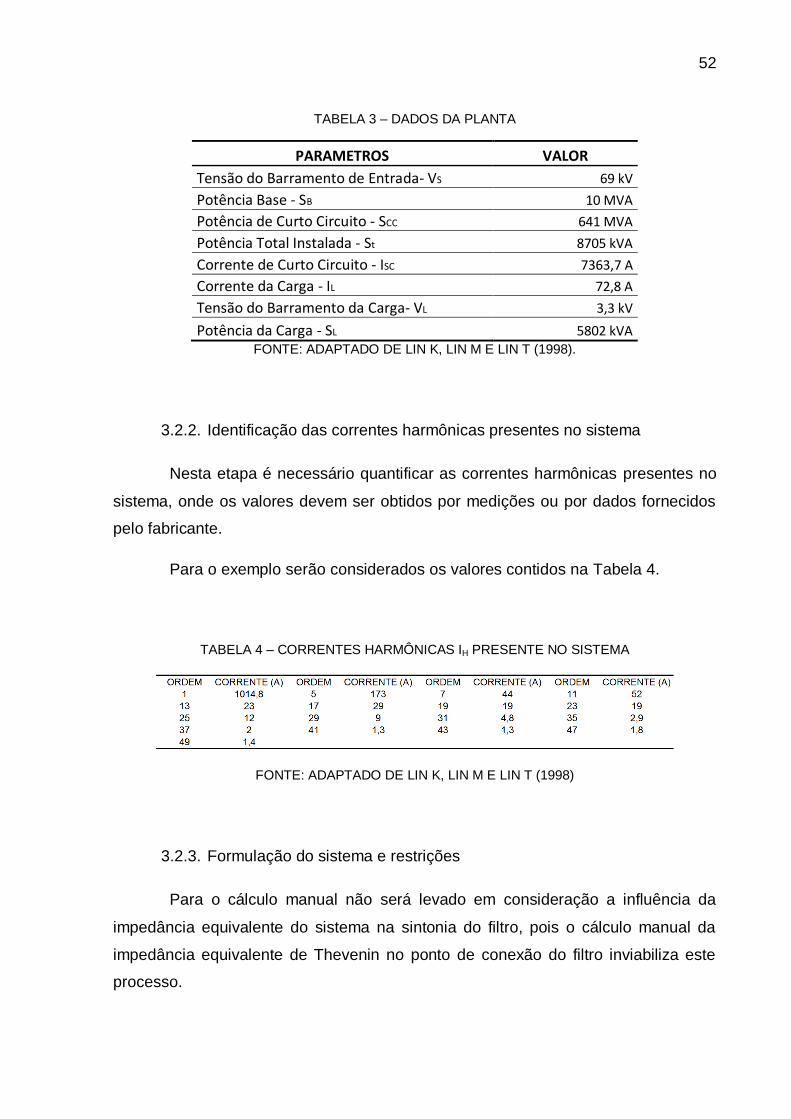
3.2.1. Levantamento de dados
Nesta etapa deve ser realizado o levantamento de dados do sistema. Para o
exemplo proposto os dados estão compilados na Tabela 3.
52
TABELA 3 – DADOS DA PLANTA
PARAMETROS VALOR
Tensão do Barramento de Entrada- VS 69 kV
Potência Base - SB 10 MVA
Potência de Curto Circuito - SCC 641 MVA
Potência Total Instalada - St 8705 kVA
Corrente de Curto Circuito - ISC 7363,7 A
Corrente da Carga - IL 72,8 A
Tensão do Barramento da Carga- VL 3,3 kV
Potência da Carga - SL 5802 kVA FONTE: ADAPTADO DE LIN K, LIN M E LIN T (1998).
3.2.2. Identificação das correntes harmônicas presentes no sistema
Nesta etapa é necessário quantificar as correntes harmônicas presentes no
sistema, onde os valores devem ser obtidos por medições ou por dados fornecidos
pelo fabricante.
Para o exemplo serão considerados os valores contidos na Tabela 4.
TABELA 4 – CORRENTES HARMÔNICAS IH PRESENTE NO SISTEMA
FONTE: ADAPTADO DE LIN K, LIN M E LIN T (1998)
3.2.3. Formulação do sistema e restrições
Para o cálculo manual não será levado em consideração a influência da
impedância equivalente do sistema na sintonia do filtro, pois o cálculo manual da
impedância equivalente de Thevenin no ponto de conexão do filtro inviabiliza este
processo.
53
Neste momento é necessário observar as necessidades que o filtro deve
atender:
Compensar o reativo da instalação.
Atender as recomendações da IEEE 519 (1992).
Suportar as variações do sistema de potência.
Suportar dessintonia.
A potência reativa do filtro ( ) é igual ao total da potência reativa do
sistema (para se obter o fator de potência unitário), apesar de ⁄ e
pode-se considerar que é muito próximo ao valor da potência do
capacitor ( ), no exemplo da Figura 32 pode-se encontrar através da equação
26.
( ( )) (26)
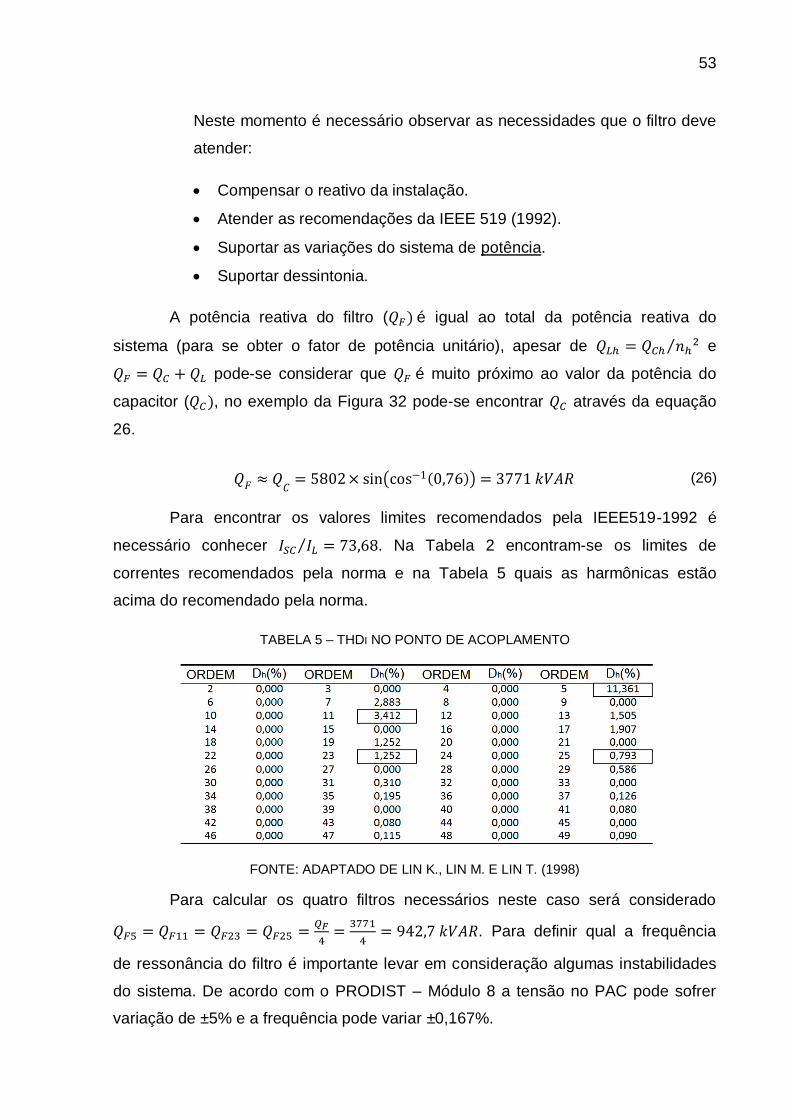
Para encontrar os valores limites recomendados pela IEEE519-1992 é
necessário conhecer ⁄ . Na Tabela 2 encontram-se os limites de
correntes recomendados pela norma e na Tabela 5 quais as harmônicas estão
acima do recomendado pela norma.
TABELA 5 – THDI NO PONTO DE ACOPLAMENTO
FONTE: ADAPTADO DE LIN K., LIN M. E LIN T. (1998)
Para calcular os quatro filtros necessários neste caso será considerado
. Para definir qual a frequência
de ressonância do filtro é importante levar em consideração algumas instabilidades
do sistema. De acordo com o PRODIST – Módulo 8 a tensão no PAC pode sofrer
variação de ±5% e a frequência pode variar ±0,167%.
54
|
|
(27)
A dessintonia do filtro pode deslocar a frequência de ressonância do filtro
para longe da frequência harmônica que se pretende eliminar, os dois principais
fatores que influenciam neste efeito são a variação de temperatura e a tolerância na
fabricação dos componentes.
Segundo Lin K, Lin M e Lin T (1998) os capacitores podem variar até ±2%
em função da estação do ano (inverno ou verão) e podem variar de -5% à +10% em
função do processo de fabricação, portanto o capacitor pode variar conforme
equação 28.
(28)
Os indutores não são afetados pela variação da temperatura ambiente, mas
sofrem ±3% de variação em função do processo produtivo.
(29)
Reescrevendo a equação 21 encontra-se a equação 30.
√
(30)
Se forem inseridas as incertezas da equação 27, equação 28 e equação 29
na equação 30 encontra-se:
√
√
(31)
(32)
Para definir a frequência de ressonância do filtro conforme Lin K, Lin M e Lin
T (1998), é necessário que:
55
( ) (33)
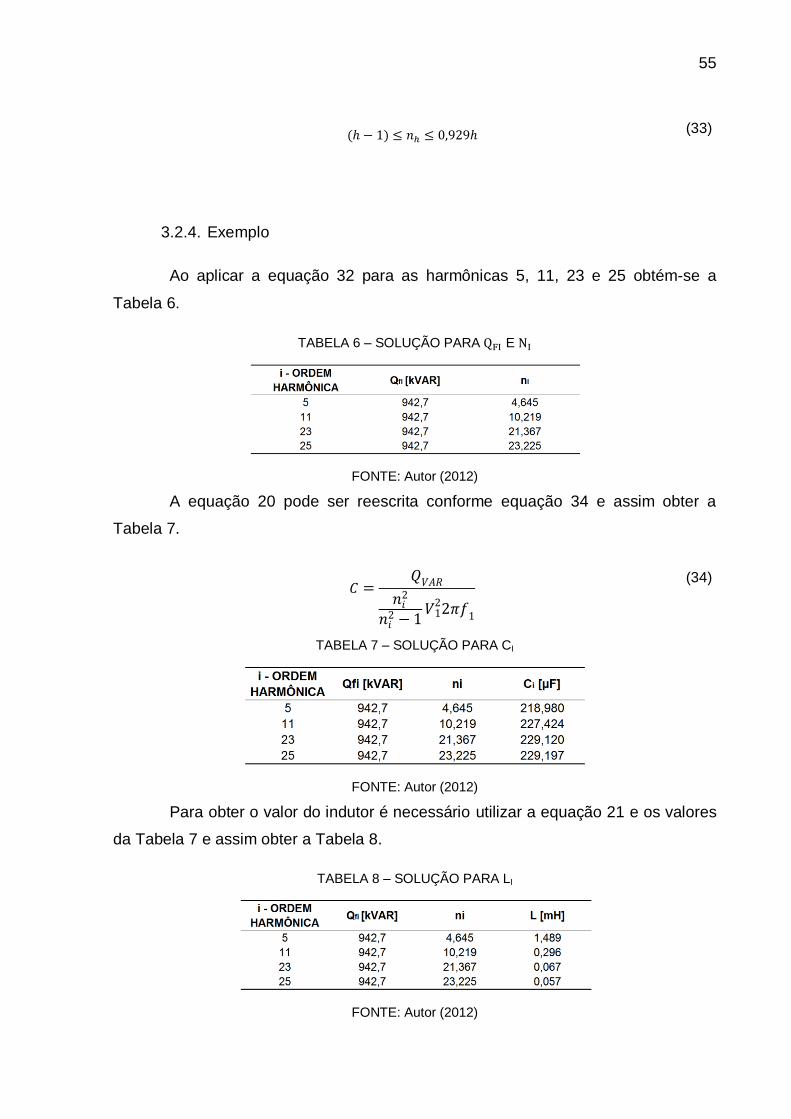
3.2.4. Exemplo
Ao aplicar a equação 32 para as harmônicas 5, 11, 23 e 25 obtém-se a
Tabela 6.
TABELA 6 – SOLUÇÃO PARA E
FONTE: Autor (2012)
A equação 20 pode ser reescrita conforme equação 34 e assim obter a
Tabela 7.
TABELA 7 – SOLUÇÃO PARA CI
FONTE: Autor (2012)
Para obter o valor do indutor é necessário utilizar a equação 21 e os valores
da Tabela 7 e assim obter a Tabela 8.
TABELA 8 – SOLUÇÃO PARA LI
FONTE: Autor (2012)
(34)
56
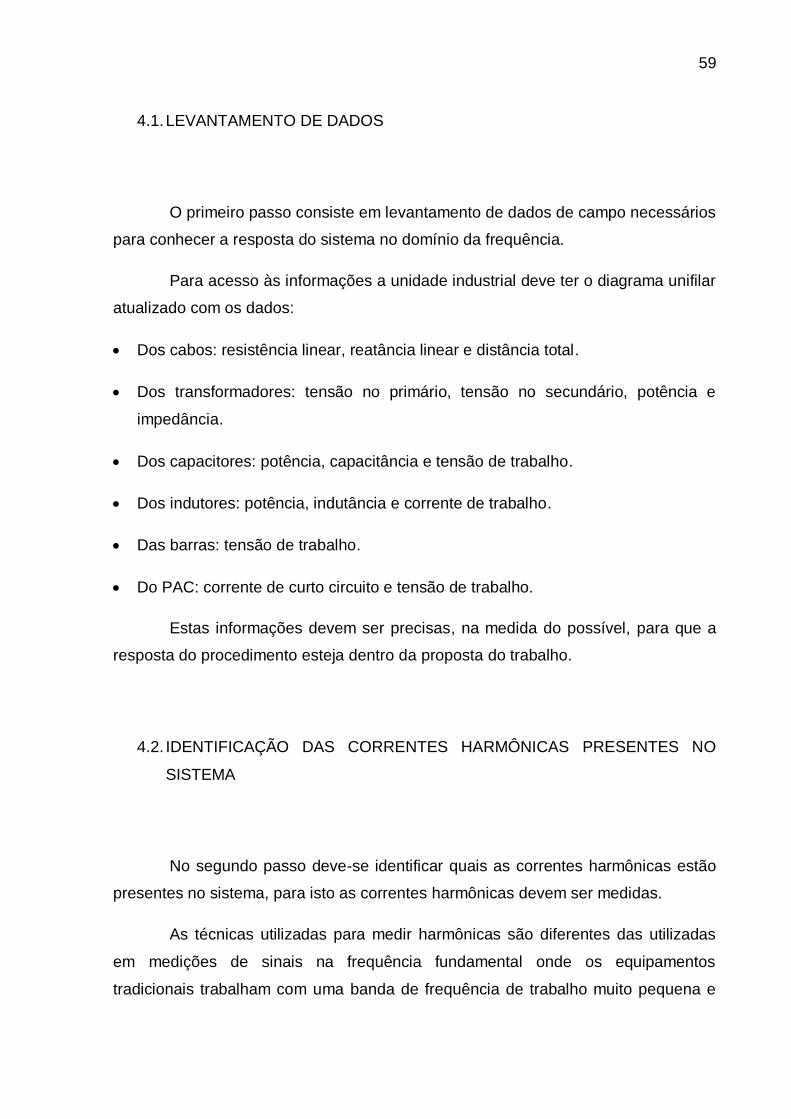
Considerando o fator de qualidade ( ) do filtro igual a 0,5 e aplicando na
equação 23 pode-se obter a Tabela 9.
TABELA 9 – SOLUÇÃO PARA RI
FONTE: Autor (2012)
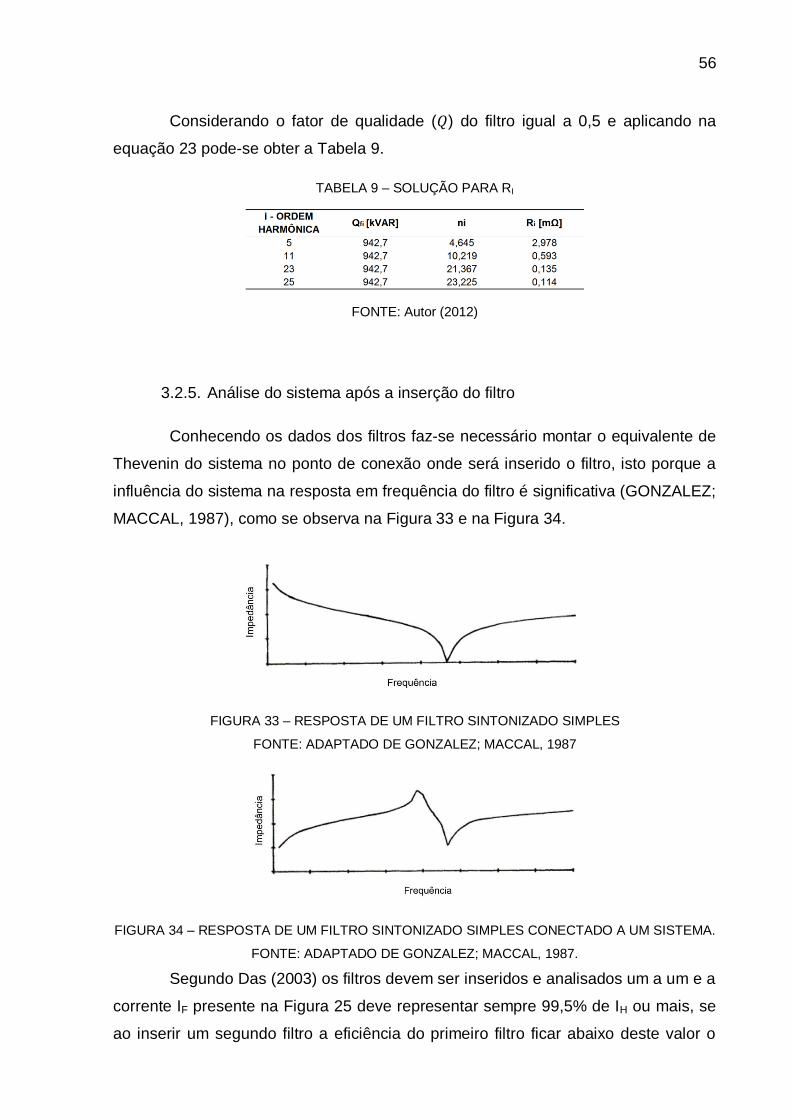
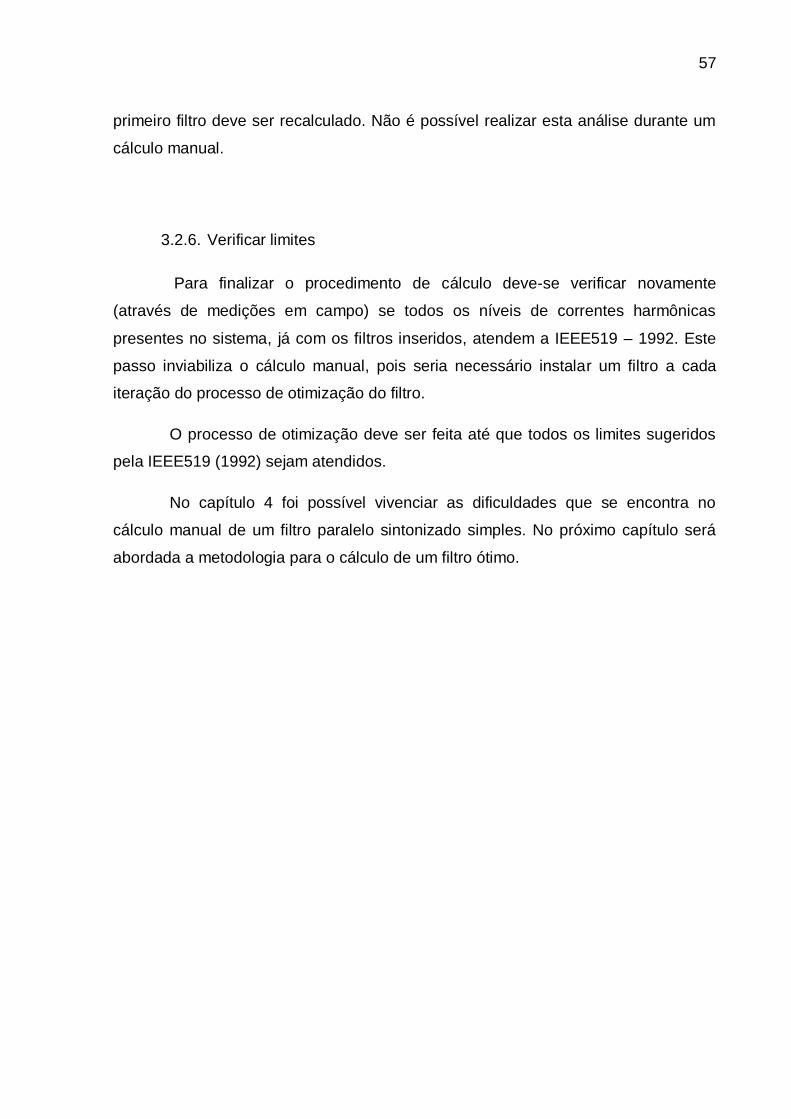
3.2.5. Análise do sistema após a inserção do filtro
Conhecendo os dados dos filtros faz-se necessário montar o equivalente de
Thevenin do sistema no ponto de conexão onde será inserido o filtro, isto porque a
influência do sistema na resposta em frequência do filtro é significativa (GONZALEZ;
MACCAL, 1987), como se observa na Figura 33 e na Figura 34.
FIGURA 33 – RESPOSTA DE UM FILTRO SINTONIZADO SIMPLES
FONTE: ADAPTADO DE GONZALEZ; MACCAL, 1987
FIGURA 34 – RESPOSTA DE UM FILTRO SINTONIZADO SIMPLES CONECTADO A UM SISTEMA.
FONTE: ADAPTADO DE GONZALEZ; MACCAL, 1987.
Segundo Das (2003) os filtros devem ser inseridos e analisados um a um e a
corrente IF presente na Figura 25 deve representar sempre 99,5% de IH ou mais, se
ao inserir um segundo filtro a eficiência do primeiro filtro ficar abaixo deste valor o
57
primeiro filtro deve ser recalculado. Não é possível realizar esta análise durante um
cálculo manual.
3.2.6. Verificar limites
Para finalizar o procedimento de cálculo deve-se verificar novamente
(através de medições em campo) se todos os níveis de correntes harmônicas
presentes no sistema, já com os filtros inseridos, atendem a IEEE519 – 1992. Este
passo inviabiliza o cálculo manual, pois seria necessário instalar um filtro a cada
iteração do processo de otimização do filtro.
O processo de otimização deve ser feita até que todos os limites sugeridos
pela IEEE519 (1992) sejam atendidos.
No capítulo 4 foi possível vivenciar as dificuldades que se encontra no
cálculo manual de um filtro paralelo sintonizado simples. No próximo capítulo será
abordada a metodologia para o cálculo de um filtro ótimo.
58
4. METODOLOGIA DE CÁLCULO ÓTIMO DE UM FILTRO PARALELO
SINTONIZADO SIMPLES
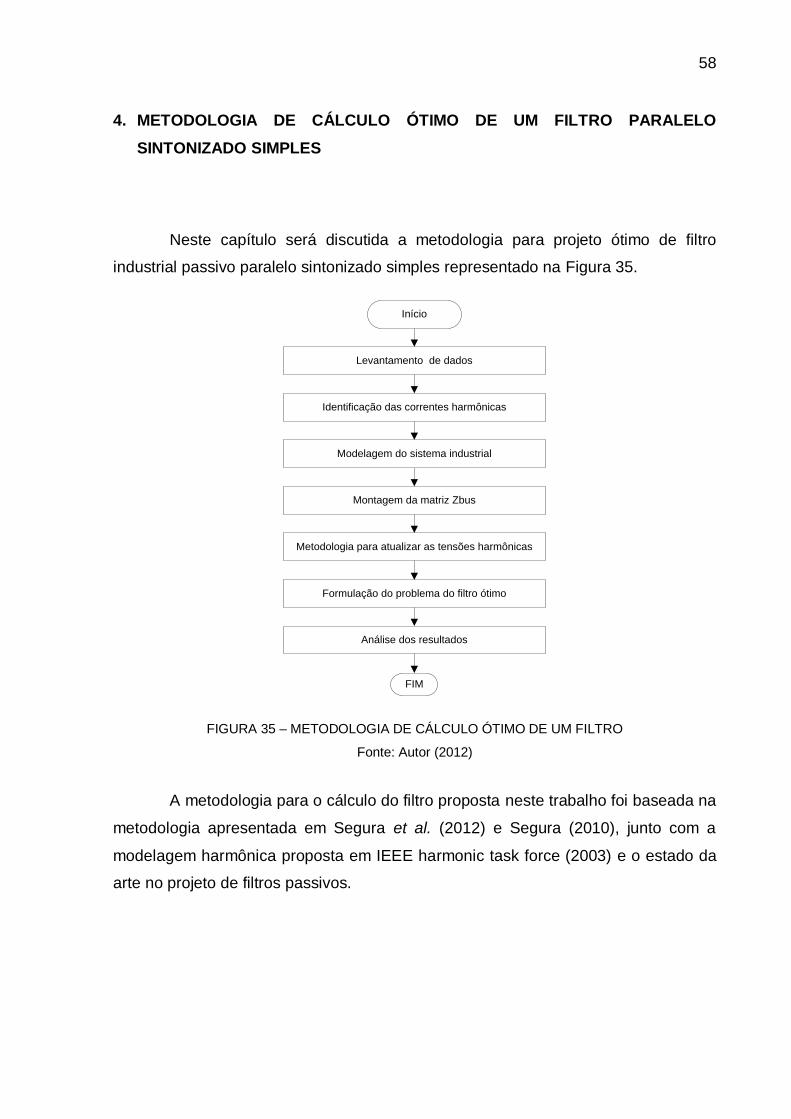
Neste capítulo será discutida a metodologia para projeto ótimo de filtro
industrial passivo paralelo sintonizado simples representado na Figura 35.
Montagem da matriz Zbus
Análise dos resultados
Formulação do problema do filtro ótimo
Metodologia para atualizar as tensões harmônicas
FIM
Início
Levantamento de dados
Modelagem do sistema industrial
Identificação das correntes harmônicas
FIGURA 35 – METODOLOGIA DE CÁLCULO ÓTIMO DE UM FILTRO
Fonte: Autor (2012)
A metodologia para o cálculo do filtro proposta neste trabalho foi baseada na
metodologia apresentada em Segura et al. (2012) e Segura (2010), junto com a
modelagem harmônica proposta em IEEE harmonic task force (2003) e o estado da
arte no projeto de filtros passivos.
59
4.1. LEVANTAMENTO DE DADOS
O primeiro passo consiste em levantamento de dados de campo necessários
para conhecer a resposta do sistema no domínio da frequência.
Para acesso às informações a unidade industrial deve ter o diagrama unifilar
atualizado com os dados:
Dos cabos: resistência linear, reatância linear e distância total.
Dos transformadores: tensão no primário, tensão no secundário, potência e
impedância.
Dos capacitores: potência, capacitância e tensão de trabalho.
Dos indutores: potência, indutância e corrente de trabalho.
Das barras: tensão de trabalho.
Do PAC: corrente de curto circuito e tensão de trabalho.
Estas informações devem ser precisas, na medida do possível, para que a
resposta do procedimento esteja dentro da proposta do trabalho.
4.2. IDENTIFICAÇÃO DAS CORRENTES HARMÔNICAS PRESENTES NO
SISTEMA
No segundo passo deve-se identificar quais as correntes harmônicas estão
presentes no sistema, para isto as correntes harmônicas devem ser medidas.
As técnicas utilizadas para medir harmônicas são diferentes das utilizadas
em medições de sinais na frequência fundamental onde os equipamentos
tradicionais trabalham com uma banda de frequência de trabalho muito pequena e
60
próxima a 60 Hz, o equipamento utilizado para medição de harmônicas pode chegar
a 3 kHz (IEEE 519, 1992).
Os principais equipamentos utilizados para a análise de funções não
senoidais são:
Osciloscópio.
Analisadores de espectros.
Analisador de harmônicos.
Medidor de distorção total de harmônicas.
Equipamento digital de medição de harmônica.
Por fim, é necessário conhecer quais os valores de correntes harmônicas
estão presentes das diversas barras da instalação, e principalmente no PAC, mas
muitas vezes o modo construtivo da subestação não permite a instalação do
analisador de qualidade de energia sem o desligamento da subestação e
consequentemente o desligamento da planta, neste caso é necessário utilizar algum
recurso computacional para chegar neste valor.
O item 4.5 do PRODIST – Módulo 8 pede que os instrumentos utilizados
para a medição das componentes harmônicas atendam os protocolos de medição e
as normas técnicas vigentes, este equipamento deve trabalhar com a faixa de
frequência que considere desde a componente fundamental até, no mínimo, a
vigésima quinta ordem harmônica e quando for necessário utilizar TPs em um
sistema trifásico, estes devem ter as mesmas especificações e suas cargas devem
corresponder a impedâncias semelhantes.
61
4.3. MODELAGEM DO SISTEMA
O terceiro passo consiste em analisar o sistema existente antes da
instalação dos filtros, para tanto é necessário conhecer o equivalente do sistema no
ponto de conexão do filtro.
O procedimento para o cálculo do equivalente do sistema deve ser iniciado
pela utilização dos seguintes dados:
Para os cabos: resistência linear, reatância linear e distância total.
Para os transformadores: tensão no primário, tensão no secundário, potência e
impedância.
Para os capacitores: potência, capacitância e tensão de trabalho.
Para os indutores: potência, indutância e corrente de trabalho.
Para as barras: tensão de trabalho.
Para o cálculo da frequência de ressonância no ponto de conexão do filtro
deve-se considerar o equivalente elétrico do sistema neste mesmo ponto, a seguir
será descrito qual a metodologia utilizada para encontrar o equivalente elétrico
sensível à frequência de cada tipo de equipamento do sistema.
4.3.1. Impedância Equivalente para transformador
A impedância equivalente no primário do transformador é dado por
(MAMEDE, 2002, p. 197):
(35)
Onde;
é a impedância do transformador referenciado ao primário (Ω);
62
é a tensão no primário do transformador (V);
é a potência do transformador (VA);
4.3.2. Impedância Equivalente para Condutor
A impedância equivalente do condutor é dada por (MAMEDE, 2002, p. 204)
( ) (36)
e
( ) (37)
onde
é a resistência total do condutor (Ω);
é a reatância total do condutor (Ω);
é a resistência linear do condutor por metro (mΩ/m);
é a reatância linear do condutor por metro (mΩ/m);
é o comprimento total do condutor (m);
é o número de condutores por fase utilizados no sistema.
4.3.3. Impedância Equivalente para Carga
Podem-se encontrar três tipos de cargas numa unidade consumidora:
Resistiva; Motiva (indutiva); Não linear. Se a componente não linear da carga for
representada de forma adequada, um circuito RLC simples pode representar a
componente linear desta carga.

63
Para cargas motoras pode-se utilizar o modelo da Figura 36. O valor de da
equação 38 pode ser encontrado dividindo a potência das cargas motoras lineares
pela potência total da carga , conforme apresentado na equação 39.
FIGURA 36 – MODELO DO MOTOR DE INDUÇÃO
FONTE: ADAPTADO DE IEEE POWER ENG. SOC. T&D COMMITTEE (2003)
( )
(38)
(39)
A constante , necessária para encontrar o valor de , é o inverso do fator
de potência do motor ( ) como apresentado na equação 40.
(40)
O valor da reatância de rotor travado pode ser encontrado junto ao
fabricante do motor e seu valor típico fica entre 0,15 p.u. e 0,25 p.u. (TASK FORCE
ON HARMONIC MODELING AND SIMULATION, IEEE POWER ENG. SOC. T&D
COMMITTEE, 2003). Com isso é possível encontrar o valor de apresentado na
equação 41 e montar o modelo apresentado na Figura 36.
(41)
O modelo apresentado na Figura 36 pode ser utilizado como aproximação
para a impedância de cargas motoras quando aplicadas à quinta harmônica ou
64
superior, para harmônicas inferiores a cinco a precisão do modelo fica
comprometido.
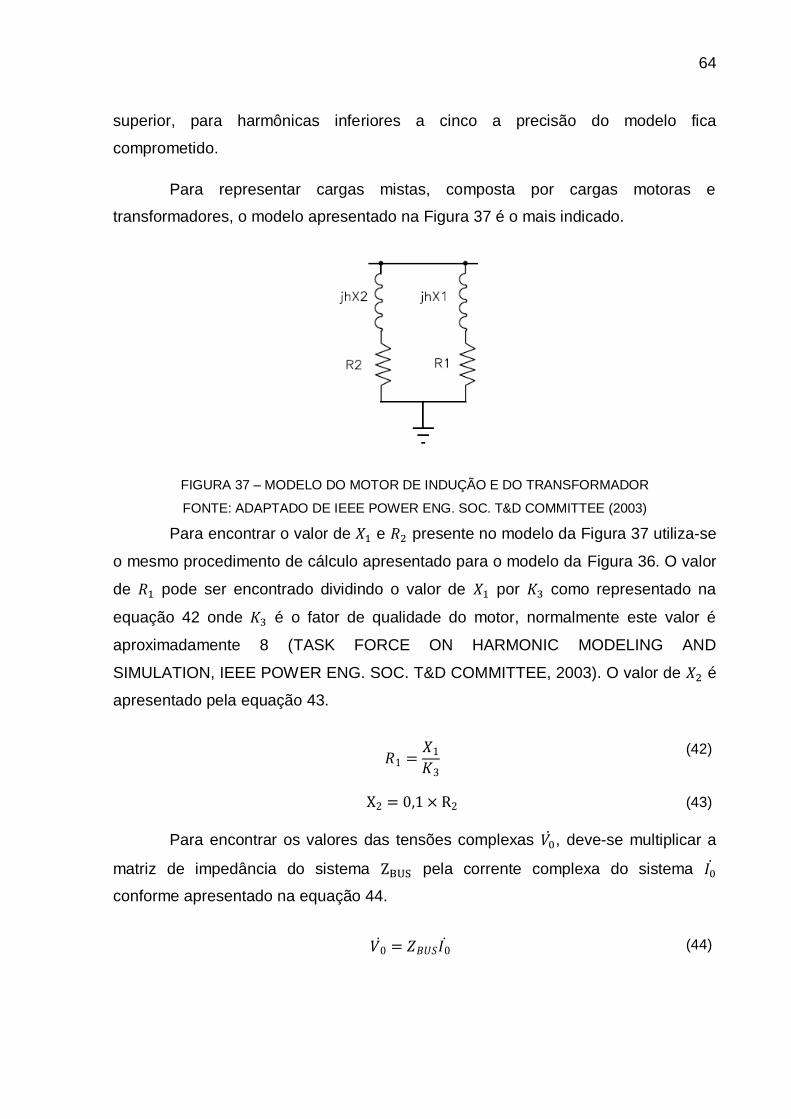
Para representar cargas mistas, composta por cargas motoras e
transformadores, o modelo apresentado na Figura 37 é o mais indicado.
FIGURA 37 – MODELO DO MOTOR DE INDUÇÃO E DO TRANSFORMADOR
FONTE: ADAPTADO DE IEEE POWER ENG. SOC. T&D COMMITTEE (2003)
Para encontrar o valor de e presente no modelo da Figura 37 utiliza-se
o mesmo procedimento de cálculo apresentado para o modelo da Figura 36. O valor
de pode ser encontrado dividindo o valor de por como representado na
equação 42 onde é o fator de qualidade do motor, normalmente este valor é
aproximadamente 8 (TASK FORCE ON HARMONIC MODELING AND
SIMULATION, IEEE POWER ENG. SOC. T&D COMMITTEE, 2003). O valor de é
apresentado pela equação 43.
(42)
(43)
Para encontrar os valores das tensões complexas , deve-se multiplicar a
matriz de impedância do sistema pela corrente complexa do sistema
conforme apresentado na equação 44.
(44)
65
Ao substituir as cargas não lineares por fontes de correntes harmônicas ( )
no sistema, podem-se encontrar as tensões harmônicas do sistema ( = 3, 5, 7, 9,
..., 49) substituindo o valor de por como apresentado na equação 45.
(45)
É necessário que as tensões harmônicas presentes no sistema sejam todas
consequências das harmônicas de corrente, para que este modelo trabalhe de forma
adequada é imprescindível que nenhuma fonte de harmônica de tensão esteja
conectada no sistema.
Neste momento é possível conhecer a matriz de impedância do sistema e as
tensões harmônicas em cada barra. É importante observar que para montar a matriz
não foram considerados os fluxos de cargas entre as barra, portanto a tensão
foi aproximada a 1 pu em cada uma das barra.
Para identificar quais os limites impostos durante o dimensionamento do
filtro é necessário rever as principais finalidades do filtro:
Suportar as variações do sistema de potência.
Suportar dissintonia.
Compensar o reativo da instalação.
Atender as recomendações da IEEE 519 (1992).
A impedância do filtro ( ) apresentada por Lin K., Lin M. e Lin T. (1998)
está representada abaixo:
(46)
(47)
Onde:
é a frequência de sintonia do filtro para o índice .
Para analisar a resposta do filtro em frequência é necessário multiplicar a
impedância indutiva pelo fator e dividir a impedância capacitiva pelo fator , com
isto a impedância do filtro pode ser representado pela equação 48.
66
(
) [
( )
] (48)
Sabendo-se que é fixo e é um índice, a impedância do filtro é escrito em
função de e . Os valores limites de para o projeto de um filtro robusto às
variações do sistema, características construtivas dos componentes e temperatura
do ambiente de trabalho indicado pela equação 33 possui uma incoerência quando
, pois a equação 33 não possui resposta verdadeira para . Devido a
esta inconsistência foi estabelecido o valor de conforme a equação 49.
(49)
Sendo assim a impedância do filtro de índice ( ) é uma função de .
4.4. MONTANGEM DA MATRIZ ZBUS E ATUALIZAÇÃO DAS DISTORÇÕES
HARMÔNICAS COM NOVO FILTRO
Após a inserção dos filtros a característica de impedância do sistema é
alterada, por este motivo é necessário encontrar as novas tensões dos barramentos.
Ao inserir uma variação de corrente na equação 44 encontra-se a equação 50.
( ) ⏟
⏟
(50)
Se considerar que o sistema estava inicialmente desenergizado chega-se na
equação 51.
(51)
Como as correntes harmônicas inseridas no sistema são conhecidas,
podem-se encontrar as tensões harmônicas na barra ( ).
Quando um filtro de reatância for conectado na barra , a corrente
drenada por ele é calculada pela equação 52 (SEGURA et al., 2012).
67
⁄
(52)
Entretanto, quando vários filtros são inseridos em diferentes barras ao
mesmo tempo é necessário considerar que a corrente consumida pelos filtros
dependem da impedância de Thevenin, das reatâncias dos filtros e da impedância
de transferência entre as barras. Por exemplo, se forem conectados 3 filtros
simultaneamente nas barras , e a matriz deverá ficar semelhante a
equação 53.
[
]
[
]
[
]
(53)
Depois de serem encontradas as correntes nos filtros das barras , e as
tensões harmônicas podem ser atualizadas aplicando a equação 54.
∑
(54)
Com os valores das tensões nos barramentos é possível recalcular as
correntes harmônicas presentes em cada ponto do sistema, mas principalmente no
PAC. Conhecendo este valor é possível verificar se ele encontra-se dentro dos
limites sugeridos pela IEEE 519 (1992) transcritos na Tabela 2.
4.5. FORMULAÇÃO DO PROBLEMA DO FILTRO ÓTIMO
Para o cálculo do filtro ótimo para cada componente harmônica foi utilizado
um algoritmo genético com a função expressa pela equação 55.
( ) ∑
(55)
68
Onde
é o custo total dos filtros;
é o custo individual do filtro de índice .
Foi utilizado o algoritmo genético pois o Matlat possui uma função que é
facilmente parametrizada, mas a resolução pode ser feita por outros métodos
heurísticos ou por modelos tradicionais ou newtonianos.
Para compor a função é necessário o levantamento de todos os
custos envolvidos no projeto do filtro, estes custos envolvem os custos de aquisição
dos componentes do filtro, custos com instalação e custo com manutenção.
(56)
Onde:
é custo de compra do filtro;
é o custo de instalação do filtro;
é o custo de manutenção do filtro;
O custo de compra dos componentes do filtro é baseado nas tabelas de
custos dos componentes. O custo de instalação é baseado no custo da mão de obra
necessária para a instalação do filtro e este valor deve ser multiplicado pelo número
de filtros que devem ser instalados. Como referencia pode ser considerada 160
horas de trabalho de um eletricista e 16 horas de trabalho de um engenheiro para
cada filtro.
O custo de manutenção compreende os custos com a manutenção da sala
(iluminação e condicionamento da sala) e com o profissional de manutenção.
Geralmente os filtros de baixa tensão são instalados dentro de centro de comando
de motores já existentes e os filtros de media tensão são instalados ao ar livre na
subestação, portanto os custos com a climatização e iluminação da sala podem ser
desprezados. Os custos com o profissional de manutenção pode ser representado
por 12 horas por ano para cada filtro. Para a análise da instalação do filtro como um
projeto é necessário definir qual o período de duração do projeto, para este caso
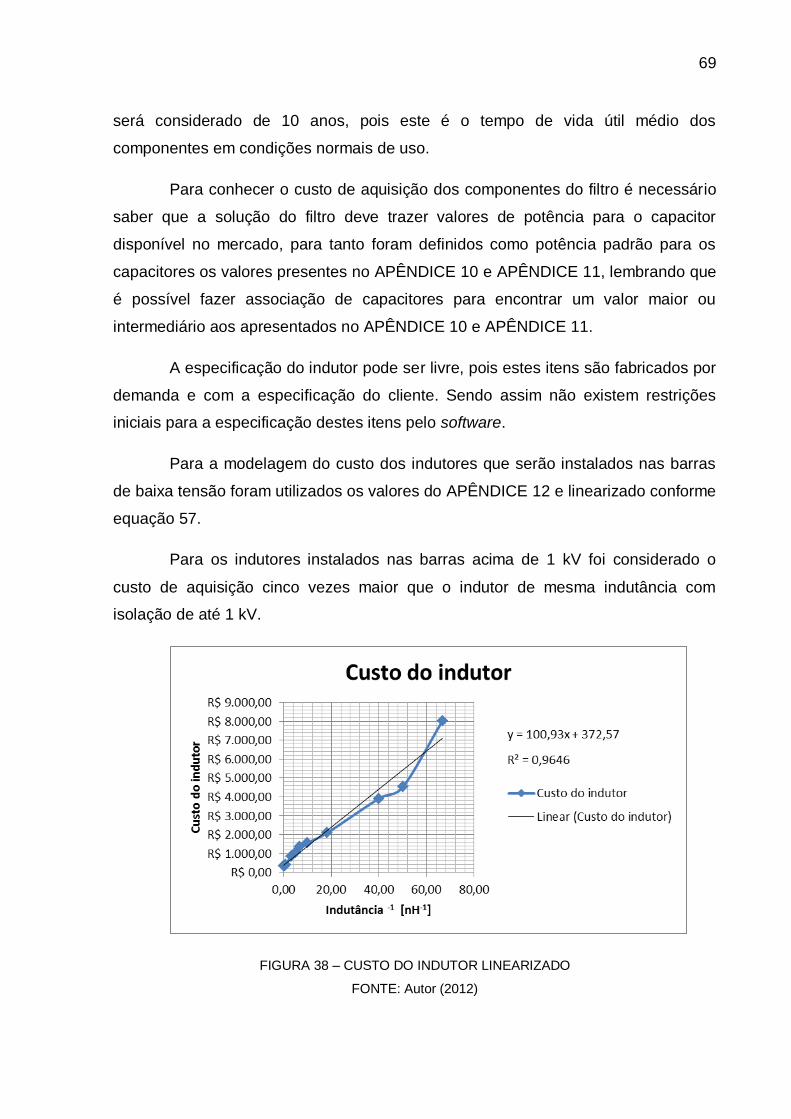
69
será considerado de 10 anos, pois este é o tempo de vida útil médio dos
componentes em condições normais de uso.
Para conhecer o custo de aquisição dos componentes do filtro é necessário
saber que a solução do filtro deve trazer valores de potência para o capacitor
disponível no mercado, para tanto foram definidos como potência padrão para os
capacitores os valores presentes no APÊNDICE 10 e APÊNDICE 11, lembrando que
é possível fazer associação de capacitores para encontrar um valor maior ou
intermediário aos apresentados no APÊNDICE 10 e APÊNDICE 11.
A especificação do indutor pode ser livre, pois estes itens são fabricados por
demanda e com a especificação do cliente. Sendo assim não existem restrições
iniciais para a especificação destes itens pelo software.
Para a modelagem do custo dos indutores que serão instalados nas barras
de baixa tensão foram utilizados os valores do APÊNDICE 12 e linearizado conforme
equação 57.
Para os indutores instalados nas barras acima de 1 kV foi considerado o
custo de aquisição cinco vezes maior que o indutor de mesma indutância com
isolação de até 1 kV.
FIGURA 38 – CUSTO DO INDUTOR LINEARIZADO
FONTE: Autor (2012)
70
(57)
Onde
é o custo de compra do indutor (R$);
é o inverso do valor do indutor (mH).
No ambiente industrial existem algumas restrições para a instalação de
painéis e filtros, assim, os pontos de conexão possíveis devem ser inseridos no
software. A seleção dos barramentos disponíveis para a instalação dos painéis dos
filtros deve ser realizada observando a existência de espaço físico, ponto de
conexão disponível, condicionamento da sala e facilidade de manutenção. Portanto
os barramentos disponíveis para conexão devem ser fornecidos e para este grupo
de barramentos deve ser encontrada uma solução ótima de filtro.
A identificação das correntes harmônicas que inicialmente se apresentam
acima do limite orientado pela IEEE 519 (1992) deve ser manual e informado ao
programa. A potência total instalada do sistema no PAC e a potência de curto
circuito no PAC devem ser informadas ao programa.
Para que o filtro chegue à sua solução ótima é necessário que seja feito
varias iterações, ou seja, o cálculo do filtro e a análise do sistema após a inserção
do filtro são realizados tantas vezes quanto for parametrizado no algoritmo genético.
4.5.1. Restrições
O fator de potência do sistema será alterado com o incremento da potência
reativa total do filtro ( ). Os valores de devem ser calculados de forma que o
fator de potência total do sistema após a inserção do filtro ( ) respeite os
limites apresentados na equação 58.
(58)
Onde
é o fator de potência do sistema após a inserção do filtro;
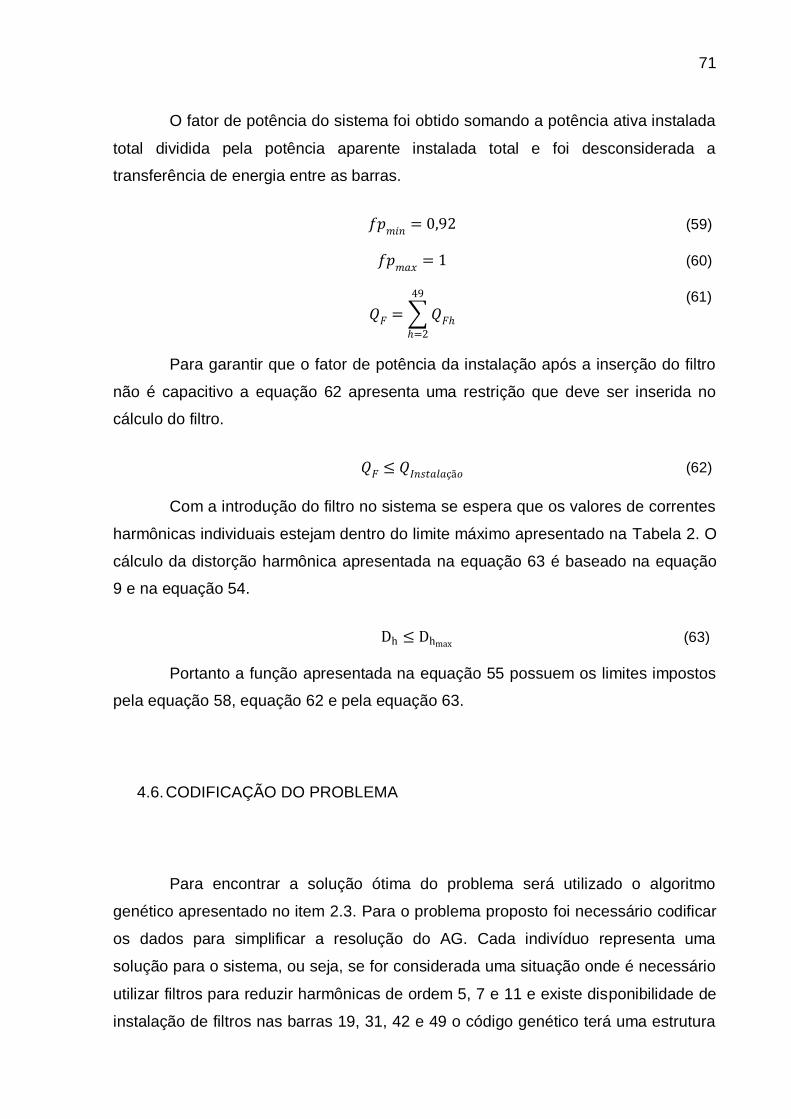
71
O fator de potência do sistema foi obtido somando a potência ativa instalada
total dividida pela potência aparente instalada total e foi desconsiderada a
transferência de energia entre as barras.
(59)
(60)
∑
(61)
Para garantir que o fator de potência da instalação após a inserção do filtro
não é capacitivo a equação 62 apresenta uma restrição que deve ser inserida no
cálculo do filtro.
(62)
Com a introdução do filtro no sistema se espera que os valores de correntes
harmônicas individuais estejam dentro do limite máximo apresentado na Tabela 2. O
cálculo da distorção harmônica apresentada na equação 63 é baseado na equação
9 e na equação 54.
(63)
Portanto a função apresentada na equação 55 possuem os limites impostos
pela equação 58, equação 62 e pela equação 63.
4.6. CODIFICAÇÃO DO PROBLEMA
Para encontrar a solução ótima do problema será utilizado o algoritmo
genético apresentado no item 2.3. Para o problema proposto foi necessário codificar
os dados para simplificar a resolução do AG. Cada indivíduo representa uma
solução para o sistema, ou seja, se for considerada uma situação onde é necessário
utilizar filtros para reduzir harmônicas de ordem 5, 7 e 11 e existe disponibilidade de
instalação de filtros nas barras 19, 31, 42 e 49 o código genético terá uma estrutura
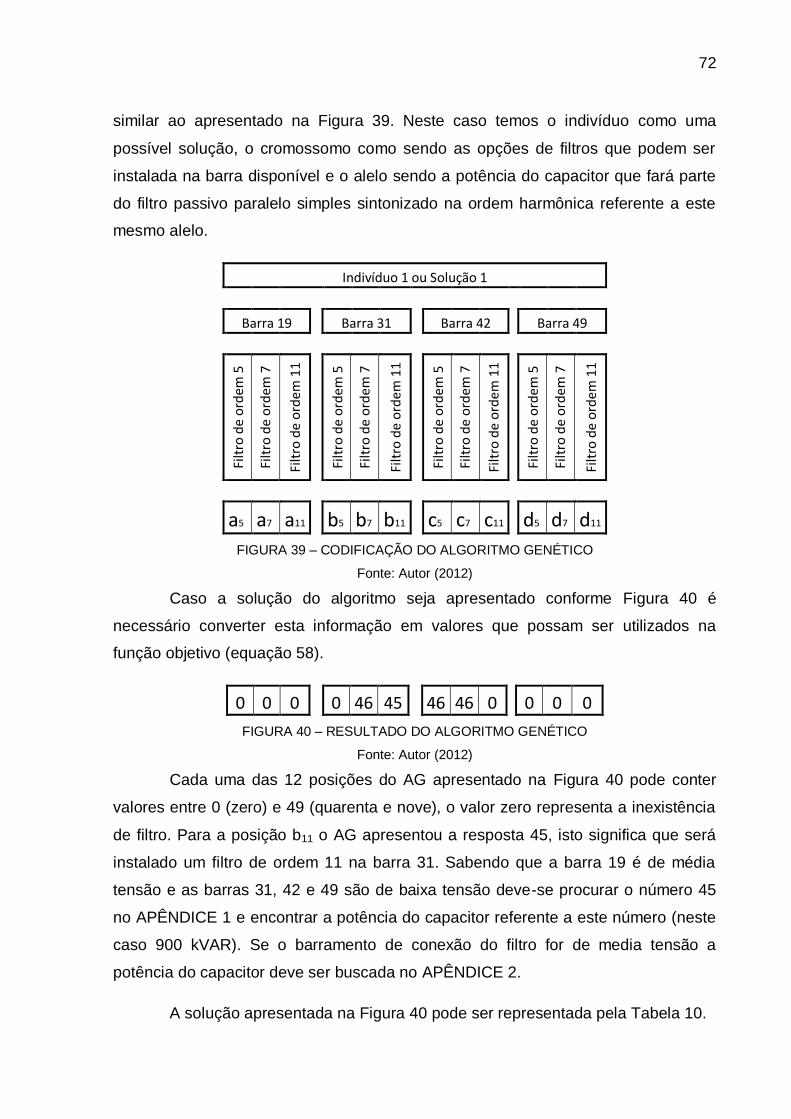
72
similar ao apresentado na Figura 39. Neste caso temos o indivíduo como uma
possível solução, o cromossomo como sendo as opções de filtros que podem ser
instalada na barra disponível e o alelo sendo a potência do capacitor que fará parte
do filtro passivo paralelo simples sintonizado na ordem harmônica referente a este
mesmo alelo.
Indivíduo 1 ou Solução 1
Barra 19 Barra 31 Barra 42 Barra 49
Filt
ro d
e o
rdem
5
Filt
ro d
e o
rdem
7
Filt
ro d
e o
rdem
11
Filt
ro d
e o
rdem
5
Filt
ro d
e o
rdem
7
Filt
ro d
e o
rdem
11
Filt
ro d
e o
rdem
5
Filt
ro d
e o
rdem
7
Filt
ro d
e o
rdem
11
Filt
ro d
e o
rdem
5
Filt
ro d
e o
rdem
7
Filt
ro d
e o
rdem
11
a5 a7 a11 b5 b7 b11 c5 c7 c11 d5 d7 d11
FIGURA 39 – CODIFICAÇÃO DO ALGORITMO GENÉTICO
Fonte: Autor (2012)
Caso a solução do algoritmo seja apresentado conforme Figura 40 é
necessário converter esta informação em valores que possam ser utilizados na
função objetivo (equação 58).
0 0 0 0 46 45 46 46 0 0 0 0
FIGURA 40 – RESULTADO DO ALGORITMO GENÉTICO
Fonte: Autor (2012)
Cada uma das 12 posições do AG apresentado na Figura 40 pode conter
valores entre 0 (zero) e 49 (quarenta e nove), o valor zero representa a inexistência
de filtro. Para a posição b11 o AG apresentou a resposta 45, isto significa que será
instalado um filtro de ordem 11 na barra 31. Sabendo que a barra 19 é de média
tensão e as barras 31, 42 e 49 são de baixa tensão deve-se procurar o número 45
no APÊNDICE 1 e encontrar a potência do capacitor referente a este número (neste
caso 900 kVAR). Se o barramento de conexão do filtro for de media tensão a
potência do capacitor deve ser buscada no APÊNDICE 2.
A solução apresentada na Figura 40 pode ser representada pela Tabela 10.
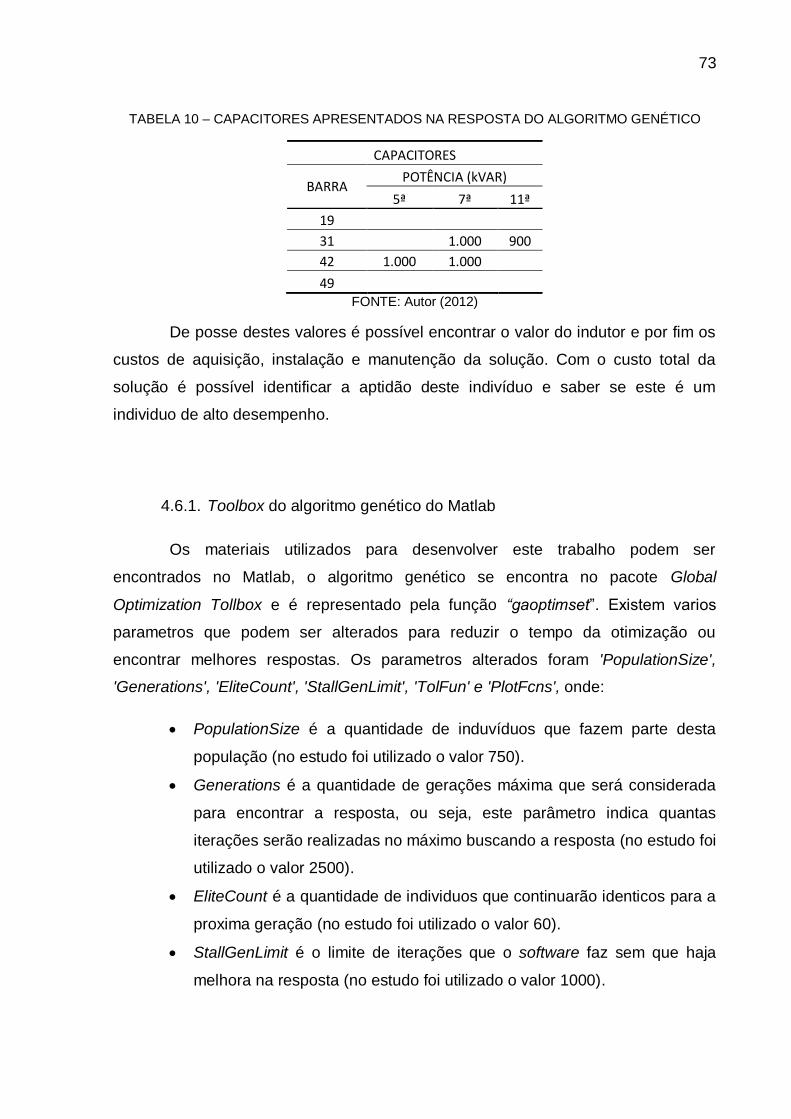
73
TABELA 10 – CAPACITORES APRESENTADOS NA RESPOSTA DO ALGORITMO GENÉTICO
CAPACITORES
BARRA POTÊNCIA (kVAR)
5ª 7ª 11ª
19
31 1.000 900
42 1.000 1.000
49 FONTE: Autor (2012)
De posse destes valores é possível encontrar o valor do indutor e por fim os
custos de aquisição, instalação e manutenção da solução. Com o custo total da
solução é possível identificar a aptidão deste indivíduo e saber se este é um
individuo de alto desempenho.
4.6.1. Toolbox do algoritmo genético do Matlab
Os materiais utilizados para desenvolver este trabalho podem ser
encontrados no Matlab, o algoritmo genético se encontra no pacote Global
Optimization Tollbox e é representado pela função “gaoptimset”. Existem varios
parametros que podem ser alterados para reduzir o tempo da otimização ou
encontrar melhores respostas. Os parametros alterados foram 'PopulationSize',
'Generations', 'EliteCount', 'StallGenLimit', 'TolFun' e 'PlotFcns', onde:
PopulationSize é a quantidade de induvíduos que fazem parte desta
população (no estudo foi utilizado o valor 750).
Generations é a quantidade de gerações máxima que será considerada
para encontrar a resposta, ou seja, este parâmetro indica quantas
iterações serão realizadas no máximo buscando a resposta (no estudo foi
utilizado o valor 2500).
EliteCount é a quantidade de individuos que continuarão identicos para a
proxima geração (no estudo foi utilizado o valor 60).
StallGenLimit é o limite de iterações que o software faz sem que haja
melhora na resposta (no estudo foi utilizado o valor 1000).
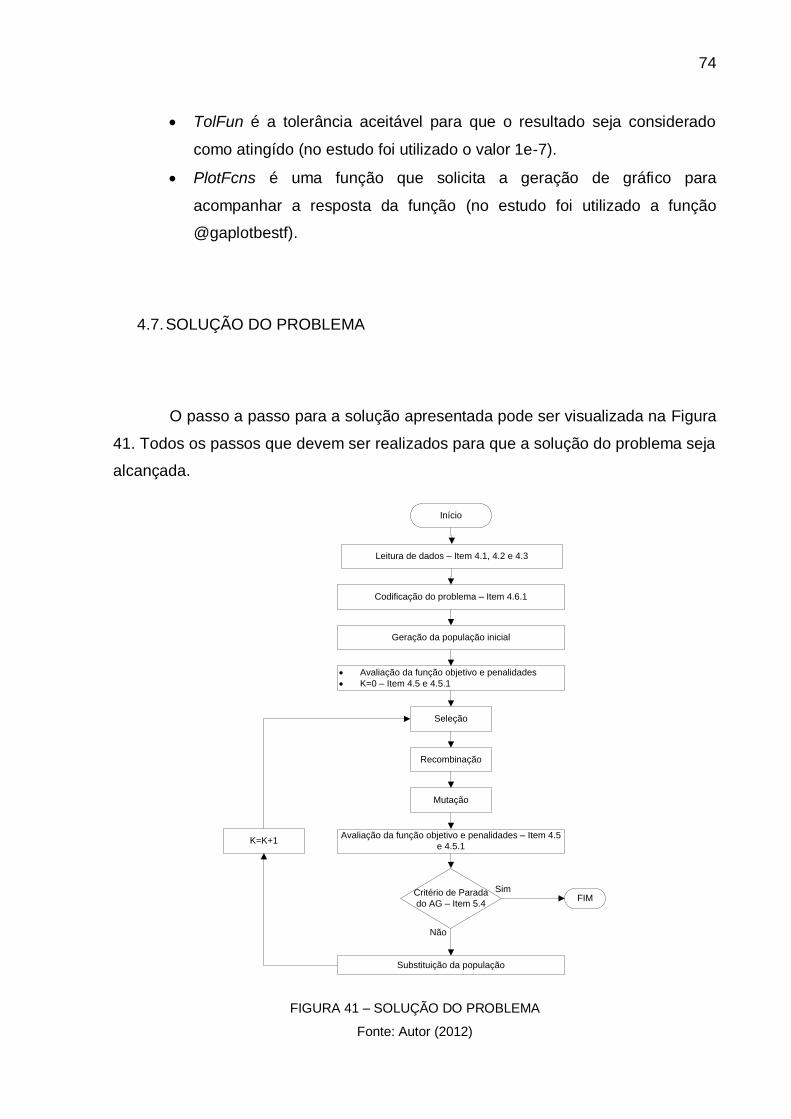
74
TolFun é a tolerância aceitável para que o resultado seja considerado
como atingído (no estudo foi utilizado o valor 1e-7).
PlotFcns é uma função que solicita a geração de gráfico para
acompanhar a resposta da função (no estudo foi utilizado a função
@gaplotbestf).
4.7. SOLUÇÃO DO PROBLEMA
O passo a passo para a solução apresentada pode ser visualizada na Figura
41. Todos os passos que devem ser realizados para que a solução do problema seja
alcançada.
Avaliação da função objetivo e penalidades
K=0 – Item 4.5 e 4.5.1
Mutação
Avaliação da função objetivo e penalidades – Item 4.5
e 4.5.1
Substituição da população
K=K+1
Recombinação
Seleção
Critério de Parada
do AG – Item 5.4
Não
SimFIM
Início
Leitura de dados – Item 4.1, 4.2 e 4.3
Geração da população inicial
Codificação do problema – Item 4.6.1
FIGURA 41 – SOLUÇÃO DO PROBLEMA
Fonte: Autor (2012)
75
4.8. ANÁLISE DE VIABILIDADE ECONÔMICA
Após obter os dados de campo, especificar o filtro e levantar os custos para
o projeto é possível realizar a análise se a solução será eficiente do ponto de vista
econômico. Para a análise econômica, será utilizado o indicador de risco do projeto
o período de recuperação do investimento – Payback calculado conforme equação
64. Para viabilizar um projeto o tempo de retorno de investimento não pode ser
maior que 3 anos.
(64)
Onde:
é o custo total do filtro calculado conforme equação 55.
é a economia indireta em função da elevação do fator de
potência da instalação por ano durante o período do projeto.
é a economia com multas que deixam de ser cobradas pela
concessionária por ano durante o período do projeto.
é a economia proveniente da queima de equipamentos que
deixam de ocorrer por ano durante o período do projeto.
A economia indireta em função da elevação do fator de potência esta
relacionada à possibilidade de postergar a necessidade de investimentos para a
elevação de potência da instalação. Este valor será significativo apenas para
situações onde os transformadores e/ou cabos trabalham próximos aos valores
nominais, para os demais casos este valor pode ser considerado zero.
A concessionária de energia do Paraná não aplica multas pelo não
cumprimento dos limites de THDv impostos pelo PRODIST Módulo 8, portando este
item pode ser considerado zero. Mas existem bancos de capacitores que possuem
sistemas de proteção que atuam quando os níveis de ruído harmônicos estão acima
do máximo parametrizado, neste caso ocasionando multas por excesso de reativos
76
que devem ser contabilizadas como economia gerada pela instalação do filtro de
harmônica.
A economia proveniente por equipamentos que deixam de queimar após a
redução da distorção harmônico na instalação é, provavelmente, o valor mais
significativo e responsável pela viabilidade do projeto. Vários equipamentos como
controladores lógicos programáveis (CLP), fontes de alimentação, computadores
industriais, interface homem máquina (IHM), encoders, cartões de entradas
analógicas, sistemas de vibração, instrumentos de campo e alguns tipos de
acionamentos são sensíveis a ruídos harmônicos e sempre que expostos a níveis
elevados geram falhas que acarretam em parada de produção ou perda de
qualidade no produto final. Estas situações devem ser mensuradas, pois
representam uma parte significativa da economia que a instalação do filtro de
harmônica proporciona. Porém as falhas proveniente da baixa qualidade da energia
são difíceis de ser identificadas, portanto este levantamento fica subjetivo e muito
difícil de ser comprovado antes da instalação do filtro.
Neste capítulo foi apresentada a metodologia para a implementação do
cálculo do filtro passivo paralelo sintonizado simples ótimo, que será utilizado no
estudo de caso abordado no capítulo 5.
77
5. ESTUDO DE CASO
Neste capítulo será realizado o cálculo dos filtros passivos necessários para
atender a recomendação da IEEE 519 (1992) de forma ótima utilizando a
metodologia apresentada no capítulo 4.
O dimensionamento do filtro passivo de harmônica ótimo proposto neste
trabalho foi desenvolvido a partir de informações de uma unidade industrial de
fertilizantes localizada no litoral norte do Paraná, esta unidade fabril foi inaugurada
em 2008, mas o procedimento pode ser utilizado para qualquer indústria com
características similares. No APÊNDICE 13 pode ser encontrado o diagrama unifilar
resumido da unidade estudada e no APÊNDICE 14 a lista De_Para das cargas
consideradas na análise.
5.1. LEVANTAMENTO DE DADOS
Esta unidade industrial possui a documentação completa e atualizada, o que
proporcionou o levantamento dos dados necessários para o estudo. No diagrama
unifilar da unidade encontram-se os dados:
Dos cabos: secção transversal, número de condutores por fase e distância total.
Dos transformadores: tensão no primário, tensão no secundário, potência e
impedância.
Dos capacitores: potência, capacitância e tensão de trabalho.
Dos indutores: potência, indutância e corrente de trabalho.
Das barras: tensão de trabalho.
Do PAC: corrente de curto circuito e tensão de trabalho.
78
No projeto desta fábrica foram consideradas algumas premissas importantes
para a análise. Todos os motores alimentados em 4,16 kV e 6,3 kV são acionados
com partida direta e possuem capacitor de compensação de fator de potência em
paralelo com a carga e a jusante do contator que aciona o motor. Todas as cargas
de iluminação e escritório foram concentradas nos transformadores que possuem
quadros de distribuição intitulados QDLF. Os motores representam mais de 92% das
cargas alimentadas pelos centros de controle de motores (CCM), portanto os
transformadores que possuem CCM a jusante possuem cargas predominantemente
motriz. No barramento de entrada de 13,8 kV existe um banco de capacitores fixos
para correção do fator de potência que possui um indutor para limitar a corrente de
carga, estes serão ignorados pois os filtros já fazem a correção do fator de potência
necessário para a instalação (se possível os capacitores existentes podem ser
utilizados para montar os filtros que serão dimensionados, reduzindo o custo total do
projeto). O unifilar resumido da unidade industrial é apresentado no APÊNDICE 13.
As cargas motoras alimentadas em baixa tensão variam de 1 CV à 350 CV,
e estão apresentadas no APÊNDICE 3 ao APÊNDICE 9 com as formas de
acionamentos utilizados em cada carga, sendo partida direta (PD), partida suave
(SS) ou acionamento com velocidade variável (IV). As cargas não motoras estão
representadas como pontos de alimentação (TO), sendo estes pontos destinados a
cargas resistivas ou de uso geral não contínuo.
Na Tabela 11 pode-se observar a compilação dos dados apresentados nos
apêndices.
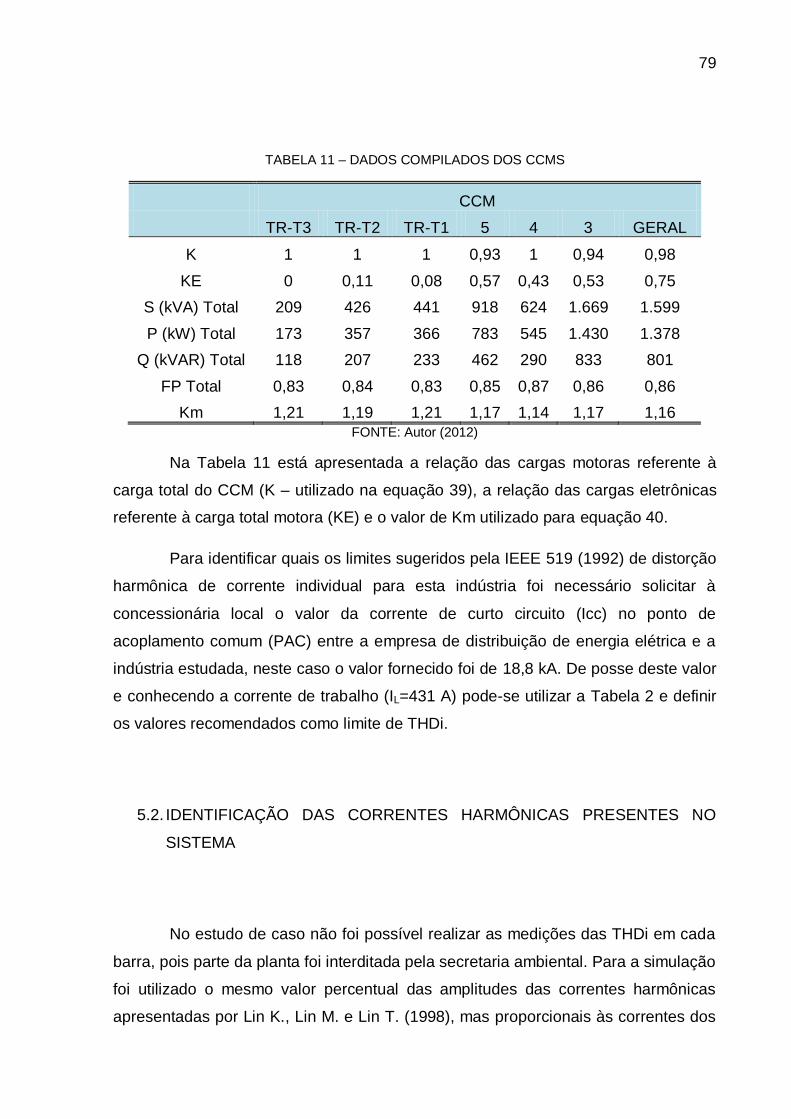
79
TABELA 11 – DADOS COMPILADOS DOS CCMS
CCM
TR-T3 TR-T2 TR-T1 5 4 3 GERAL
K 1 1 1 0,93 1 0,94 0,98
KE 0 0,11 0,08 0,57 0,43 0,53 0,75
S (kVA) Total 209 426 441 918 624 1.669 1.599
P (kW) Total 173 357 366 783 545 1.430 1.378
Q (kVAR) Total 118 207 233 462 290 833 801
FP Total 0,83 0,84 0,83 0,85 0,87 0,86 0,86
Km 1,21 1,19 1,21 1,17 1,14 1,17 1,16
FONTE: Autor (2012)
Na Tabela 11 está apresentada a relação das cargas motoras referente à
carga total do CCM (K – utilizado na equação 39), a relação das cargas eletrônicas
referente à carga total motora (KE) e o valor de Km utilizado para equação 40.
Para identificar quais os limites sugeridos pela IEEE 519 (1992) de distorção
harmônica de corrente individual para esta indústria foi necessário solicitar à
concessionária local o valor da corrente de curto circuito (Icc) no ponto de
acoplamento comum (PAC) entre a empresa de distribuição de energia elétrica e a
indústria estudada, neste caso o valor fornecido foi de 18,8 kA. De posse deste valor
e conhecendo a corrente de trabalho (IL=431 A) pode-se utilizar a Tabela 2 e definir
os valores recomendados como limite de THDi.
5.2. IDENTIFICAÇÃO DAS CORRENTES HARMÔNICAS PRESENTES NO
SISTEMA
No estudo de caso não foi possível realizar as medições das THDi em cada
barra, pois parte da planta foi interditada pela secretaria ambiental. Para a simulação
foi utilizado o mesmo valor percentual das amplitudes das correntes harmônicas
apresentadas por Lin K., Lin M. e Lin T. (1998), mas proporcionais às correntes dos
80
acionamentos não lineares instalados na unidade fabril analisada neste estudo. Para
realizar esta estimativa foram utilizados os percentuais da Tabela 5 e multiplicado
pela soma das correntes dos motores com acionamento não linear em cada CCM,
na Tabela 12 é possível verificar os valores de corrente considerados para o estudo
de caso.
A geração de distorções harmônicas na planta está concentrada no CCM 3,
4, 5 e Geral, mas o CCM TR-T1 e TR-T2 também contribuem com uma pequena
parcela como se pode observar na Tabela 11 e na Tabela 12
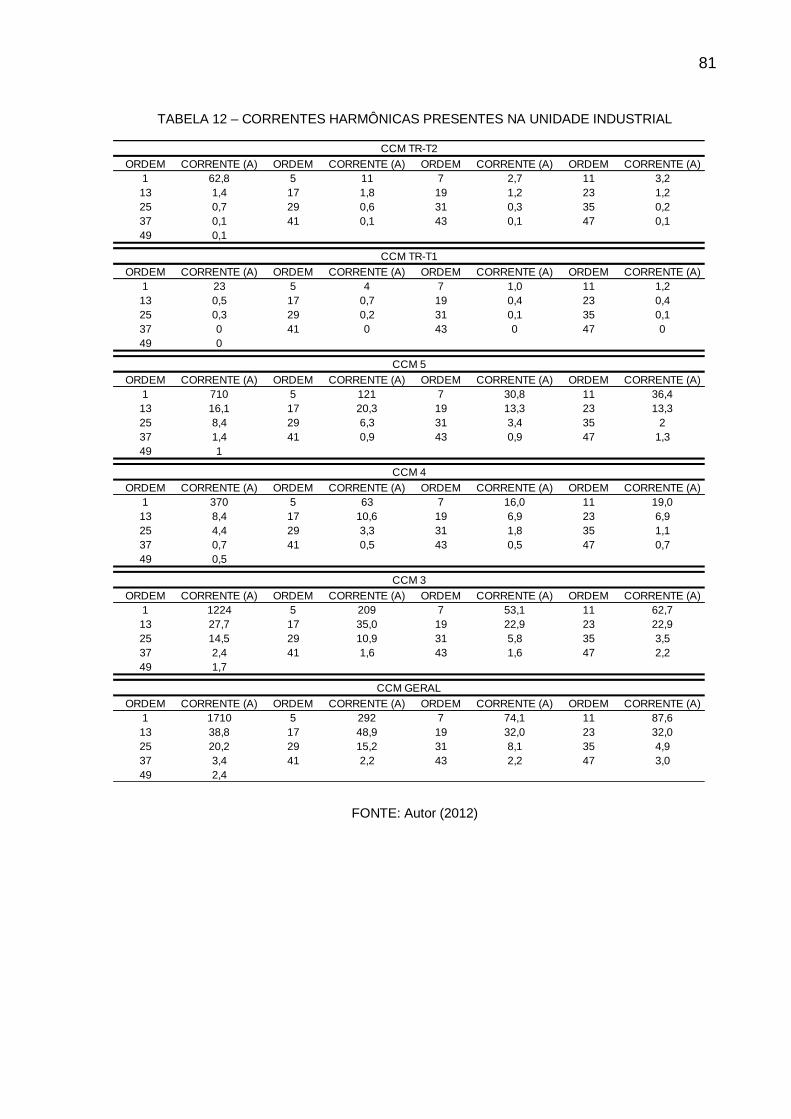
81
TABELA 12 – CORRENTES HARMÔNICAS PRESENTES NA UNIDADE INDUSTRIAL
FONTE: Autor (2012)
ORDEM CORRENTE (A) ORDEM CORRENTE (A) ORDEM CORRENTE (A) ORDEM CORRENTE (A)
1 62,8 5 11 7 2,7 11 3,2
13 1,4 17 1,8 19 1,2 23 1,2
25 0,7 29 0,6 31 0,3 35 0,2
37 0,1 41 0,1 43 0,1 47 0,1
49 0,1
ORDEM CORRENTE (A) ORDEM CORRENTE (A) ORDEM CORRENTE (A) ORDEM CORRENTE (A)
1 23 5 4 7 1,0 11 1,2
13 0,5 17 0,7 19 0,4 23 0,4
25 0,3 29 0,2 31 0,1 35 0,1
37 0 41 0 43 0 47 0
49 0
ORDEM CORRENTE (A) ORDEM CORRENTE (A) ORDEM CORRENTE (A) ORDEM CORRENTE (A)
1 710 5 121 7 30,8 11 36,4
13 16,1 17 20,3 19 13,3 23 13,3
25 8,4 29 6,3 31 3,4 35 2
37 1,4 41 0,9 43 0,9 47 1,3
49 1
ORDEM CORRENTE (A) ORDEM CORRENTE (A) ORDEM CORRENTE (A) ORDEM CORRENTE (A)
1 370 5 63 7 16,0 11 19,0
13 8,4 17 10,6 19 6,9 23 6,9
25 4,4 29 3,3 31 1,8 35 1,1
37 0,7 41 0,5 43 0,5 47 0,7
49 0,5
ORDEM CORRENTE (A) ORDEM CORRENTE (A) ORDEM CORRENTE (A) ORDEM CORRENTE (A)
1 1224 5 209 7 53,1 11 62,7
13 27,7 17 35,0 19 22,9 23 22,9
25 14,5 29 10,9 31 5,8 35 3,5
37 2,4 41 1,6 43 1,6 47 2,2
49 1,7
ORDEM CORRENTE (A) ORDEM CORRENTE (A) ORDEM CORRENTE (A) ORDEM CORRENTE (A)
1 1710 5 292 7 74,1 11 87,6
13 38,8 17 48,9 19 32,0 23 32,0
25 20,2 29 15,2 31 8,1 35 4,9
37 3,4 41 2,2 43 2,2 47 3,0
49 2,4
CCM 5
CCM 4
CCM 3
CCM GERAL
CCM TR-T2
CCM TR-T1
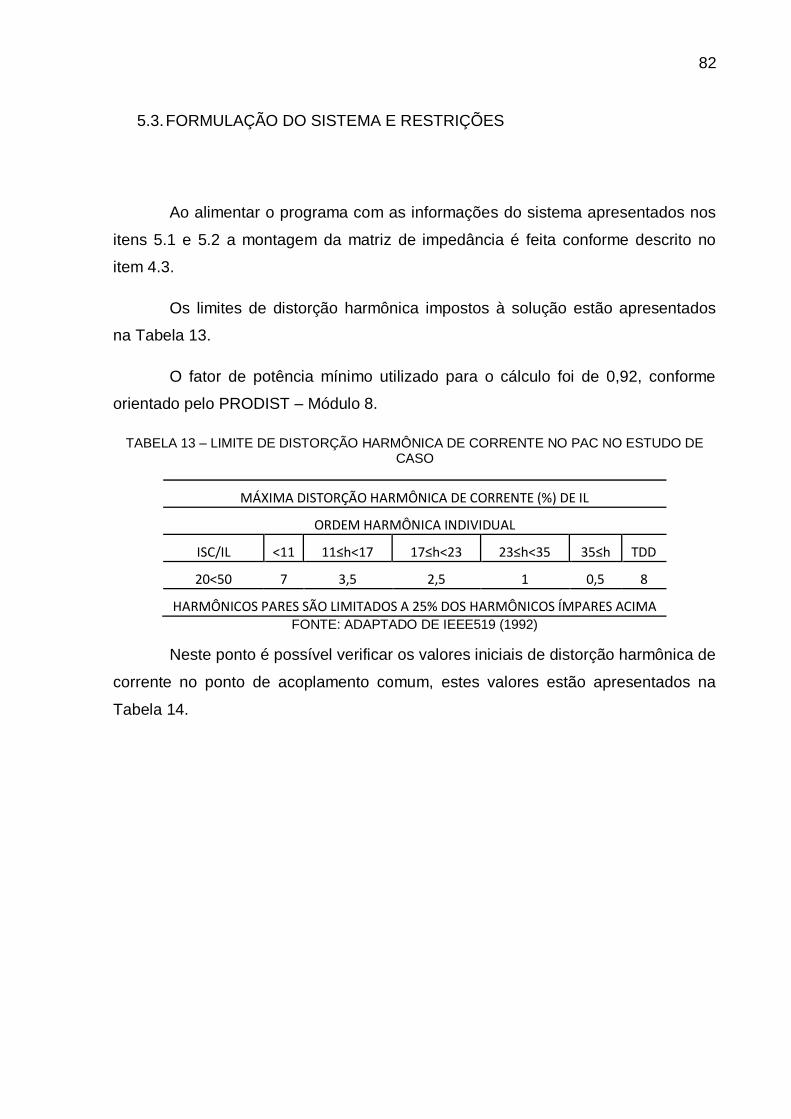
82
5.3. FORMULAÇÃO DO SISTEMA E RESTRIÇÕES
Ao alimentar o programa com as informações do sistema apresentados nos
itens 5.1 e 5.2 a montagem da matriz de impedância é feita conforme descrito no
item 4.3.
Os limites de distorção harmônica impostos à solução estão apresentados
na Tabela 13.
O fator de potência mínimo utilizado para o cálculo foi de 0,92, conforme
orientado pelo PRODIST – Módulo 8.
TABELA 13 – LIMITE DE DISTORÇÃO HARMÔNICA DE CORRENTE NO PAC NO ESTUDO DE CASO
MÁXIMA DISTORÇÃO HARMÔNICA DE CORRENTE (%) DE IL
ORDEM HARMÔNICA INDIVIDUAL
ISC/IL <11 11≤h<17 17≤h<23 23≤h<35 35≤h TDD
20<50 7 3,5 2,5 1 0,5 8
HARMÔNICOS PARES SÃO LIMITADOS A 25% DOS HARMÔNICOS ÍMPARES ACIMA FONTE: ADAPTADO DE IEEE519 (1992)
Neste ponto é possível verificar os valores iniciais de distorção harmônica de
corrente no ponto de acoplamento comum, estes valores estão apresentados na
Tabela 14.
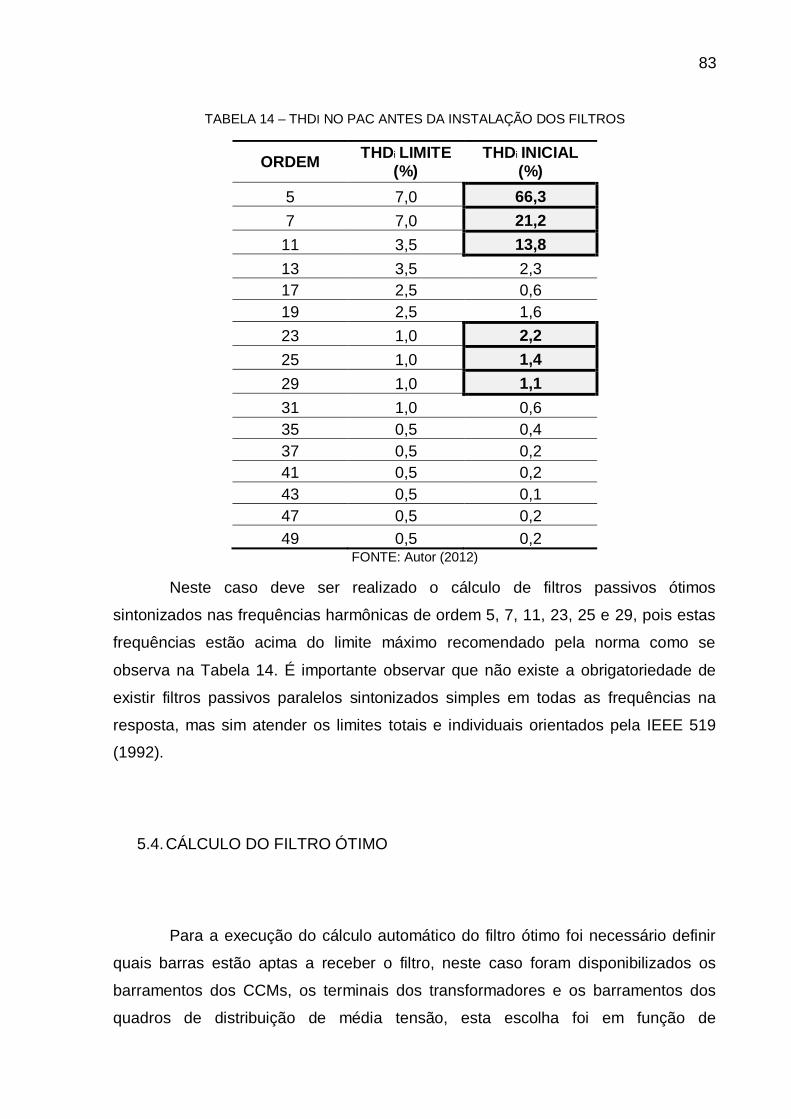
83
TABELA 14 – THDI NO PAC ANTES DA INSTALAÇÃO DOS FILTROS
ORDEM THDi LIMITE
(%) THDi INICIAL
(%)
5 7,0 66,3
7 7,0 21,2
11 3,5 13,8
13 3,5 2,3
17 2,5 0,6
19 2,5 1,6
23 1,0 2,2
25 1,0 1,4
29 1,0 1,1
31 1,0 0,6
35 0,5 0,4
37 0,5 0,2
41 0,5 0,2
43 0,5 0,1
47 0,5 0,2
49 0,5 0,2 FONTE: Autor (2012)
Neste caso deve ser realizado o cálculo de filtros passivos ótimos
sintonizados nas frequências harmônicas de ordem 5, 7, 11, 23, 25 e 29, pois estas
frequências estão acima do limite máximo recomendado pela norma como se
observa na Tabela 14. É importante observar que não existe a obrigatoriedade de
existir filtros passivos paralelos sintonizados simples em todas as frequências na
resposta, mas sim atender os limites totais e individuais orientados pela IEEE 519
(1992).
5.4. CÁLCULO DO FILTRO ÓTIMO
Para a execução do cálculo automático do filtro ótimo foi necessário definir
quais barras estão aptas a receber o filtro, neste caso foram disponibilizados os
barramentos dos CCMs, os terminais dos transformadores e os barramentos dos
quadros de distribuição de média tensão, esta escolha foi em função de
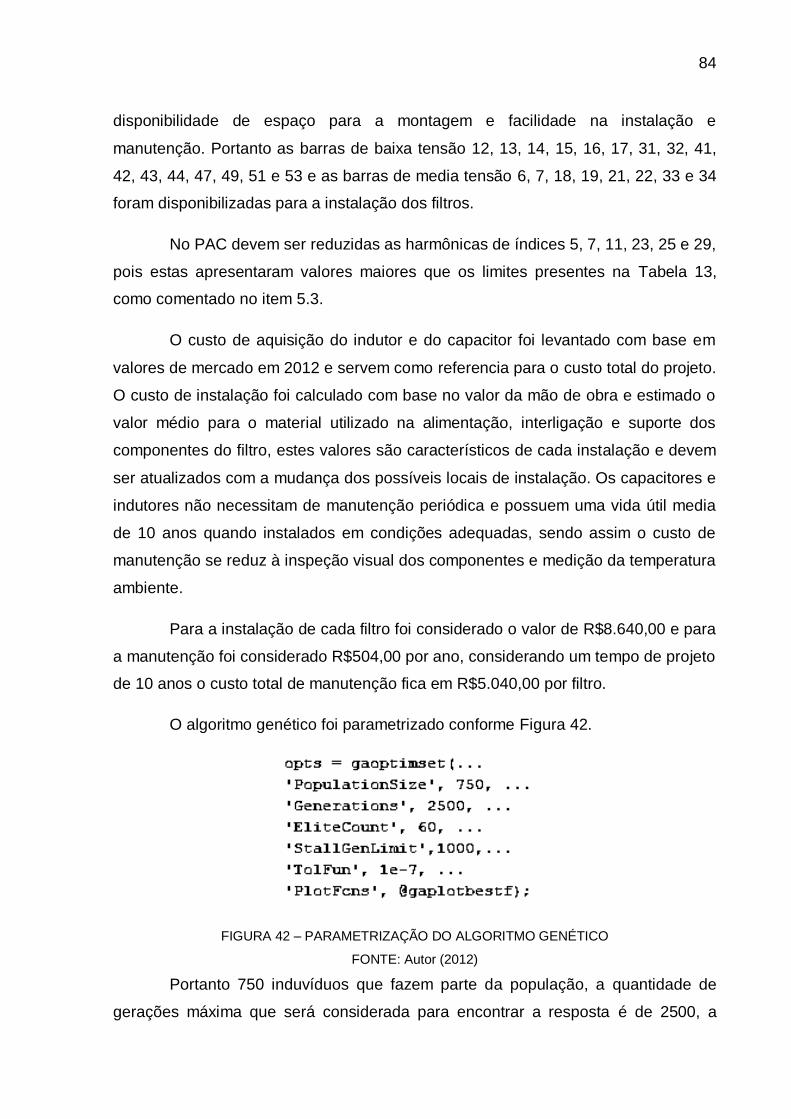
84
disponibilidade de espaço para a montagem e facilidade na instalação e
manutenção. Portanto as barras de baixa tensão 12, 13, 14, 15, 16, 17, 31, 32, 41,
42, 43, 44, 47, 49, 51 e 53 e as barras de media tensão 6, 7, 18, 19, 21, 22, 33 e 34
foram disponibilizadas para a instalação dos filtros.
No PAC devem ser reduzidas as harmônicas de índices 5, 7, 11, 23, 25 e 29,
pois estas apresentaram valores maiores que os limites presentes na Tabela 13,
como comentado no item 5.3.
O custo de aquisição do indutor e do capacitor foi levantado com base em
valores de mercado em 2012 e servem como referencia para o custo total do projeto.
O custo de instalação foi calculado com base no valor da mão de obra e estimado o
valor médio para o material utilizado na alimentação, interligação e suporte dos
componentes do filtro, estes valores são característicos de cada instalação e devem
ser atualizados com a mudança dos possíveis locais de instalação. Os capacitores e
indutores não necessitam de manutenção periódica e possuem uma vida útil media
de 10 anos quando instalados em condições adequadas, sendo assim o custo de
manutenção se reduz à inspeção visual dos componentes e medição da temperatura
ambiente.
Para a instalação de cada filtro foi considerado o valor de R$8.640,00 e para
a manutenção foi considerado R$504,00 por ano, considerando um tempo de projeto
de 10 anos o custo total de manutenção fica em R$5.040,00 por filtro.
O algoritmo genético foi parametrizado conforme Figura 42.
FIGURA 42 – PARAMETRIZAÇÃO DO ALGORITMO GENÉTICO
FONTE: Autor (2012)
Portanto 750 induvíduos que fazem parte da população, a quantidade de
gerações máxima que será considerada para encontrar a resposta é de 2500, a
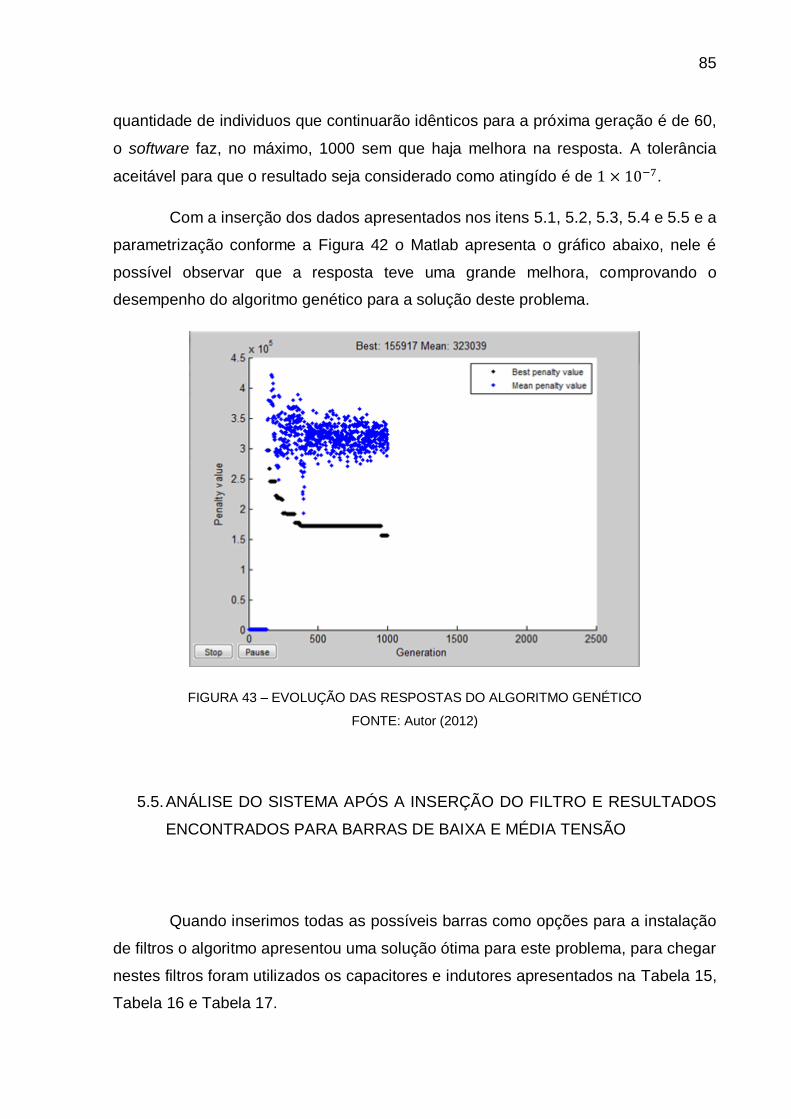
85
quantidade de individuos que continuarão idênticos para a próxima geração é de 60,
o software faz, no máximo, 1000 sem que haja melhora na resposta. A tolerância
aceitável para que o resultado seja considerado como atingído é de .
Com a inserção dos dados apresentados nos itens 5.1, 5.2, 5.3, 5.4 e 5.5 e a
parametrização conforme a Figura 42 o Matlab apresenta o gráfico abaixo, nele é
possível observar que a resposta teve uma grande melhora, comprovando o
desempenho do algoritmo genético para a solução deste problema.
FIGURA 43 – EVOLUÇÃO DAS RESPOSTAS DO ALGORITMO GENÉTICO
FONTE: Autor (2012)
5.5. ANÁLISE DO SISTEMA APÓS A INSERÇÃO DO FILTRO E RESULTADOS
ENCONTRADOS PARA BARRAS DE BAIXA E MÉDIA TENSÃO
Quando inserimos todas as possíveis barras como opções para a instalação
de filtros o algoritmo apresentou uma solução ótima para este problema, para chegar
nestes filtros foram utilizados os capacitores e indutores apresentados na Tabela 15,
Tabela 16 e Tabela 17.
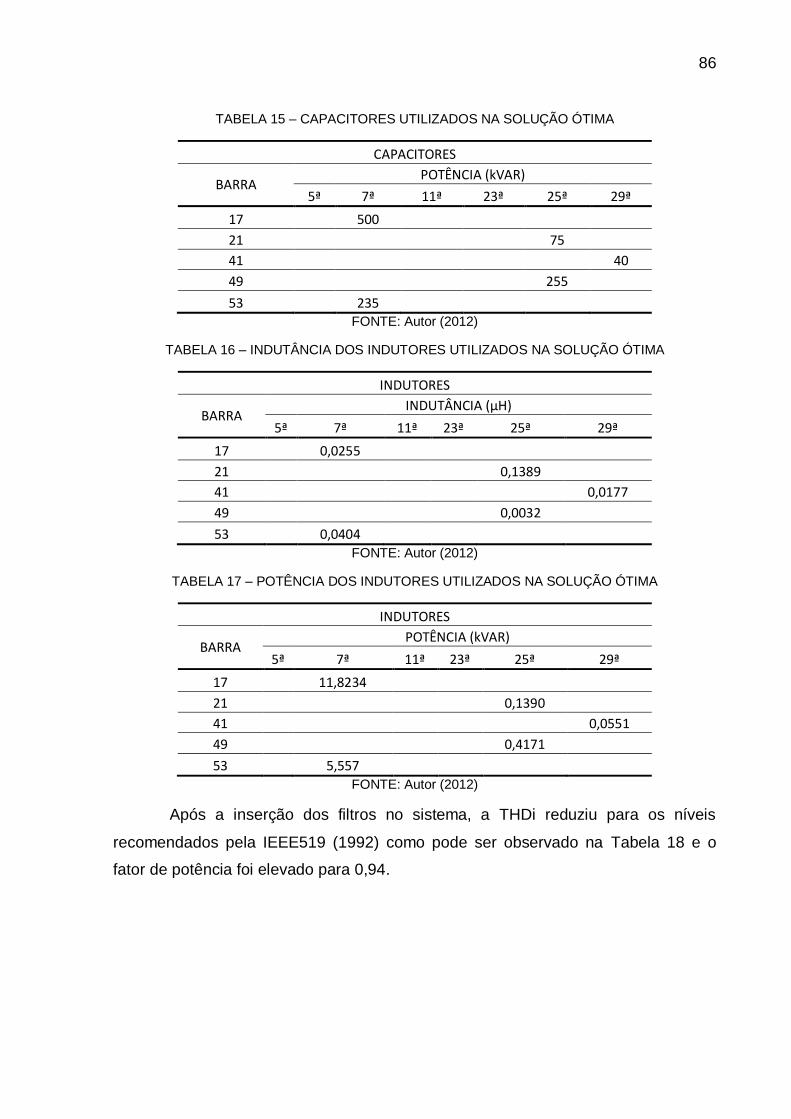
86
TABELA 15 – CAPACITORES UTILIZADOS NA SOLUÇÃO ÓTIMA
CAPACITORES
BARRA POTÊNCIA (kVAR)
5ª 7ª 11ª 23ª 25ª 29ª
17 500
21 75
41 40
49 255
53 235 FONTE: Autor (2012)
TABELA 16 – INDUTÂNCIA DOS INDUTORES UTILIZADOS NA SOLUÇÃO ÓTIMA
INDUTORES
BARRA INDUTÂNCIA (µH)
5ª 7ª 11ª 23ª 25ª 29ª
17 0,0255
21 0,1389
41 0,0177
49 0,0032
53 0,0404 FONTE: Autor (2012)
TABELA 17 – POTÊNCIA DOS INDUTORES UTILIZADOS NA SOLUÇÃO ÓTIMA
INDUTORES
BARRA POTÊNCIA (kVAR)
5ª 7ª 11ª 23ª 25ª 29ª
17 11,8234
21 0,1390
41 0,0551
49 0,4171
53 5,557 FONTE: Autor (2012)
Após a inserção dos filtros no sistema, a THDi reduziu para os níveis
recomendados pela IEEE519 (1992) como pode ser observado na Tabela 18 e o
fator de potência foi elevado para 0,94.
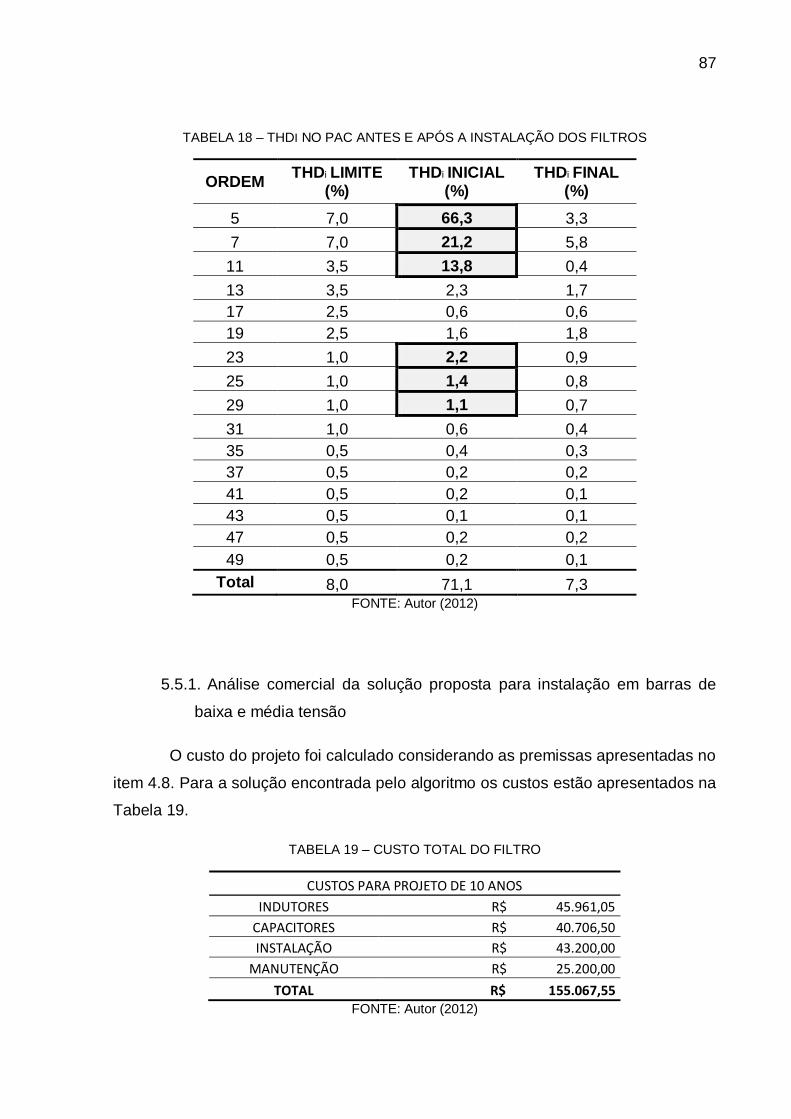
87
TABELA 18 – THDI NO PAC ANTES E APÓS A INSTALAÇÃO DOS FILTROS
ORDEM THDi LIMITE
(%) THDi INICIAL
(%) THDi FINAL
(%)
5 7,0 66,3 3,3
7 7,0 21,2 5,8
11 3,5 13,8 0,4
13 3,5 2,3 1,7
17 2,5 0,6 0,6
19 2,5 1,6 1,8
23 1,0 2,2 0,9
25 1,0 1,4 0,8
29 1,0 1,1 0,7
31 1,0 0,6 0,4
35 0,5 0,4 0,3
37 0,5 0,2 0,2
41 0,5 0,2 0,1
43 0,5 0,1 0,1
47 0,5 0,2 0,2
49 0,5 0,2 0,1
Total 8,0 71,1 7,3 FONTE: Autor (2012)
5.5.1. Análise comercial da solução proposta para instalação em barras de
baixa e média tensão
O custo do projeto foi calculado considerando as premissas apresentadas no
item 4.8. Para a solução encontrada pelo algoritmo os custos estão apresentados na
Tabela 19.
TABELA 19 – CUSTO TOTAL DO FILTRO
CUSTOS PARA PROJETO DE 10 ANOS
INDUTORES R$ 45.961,05
CAPACITORES R$ 40.706,50
INSTALAÇÃO R$ 43.200,00
MANUTENÇÃO R$ 25.200,00
TOTAL R$ 155.067,55 FONTE: Autor (2012)
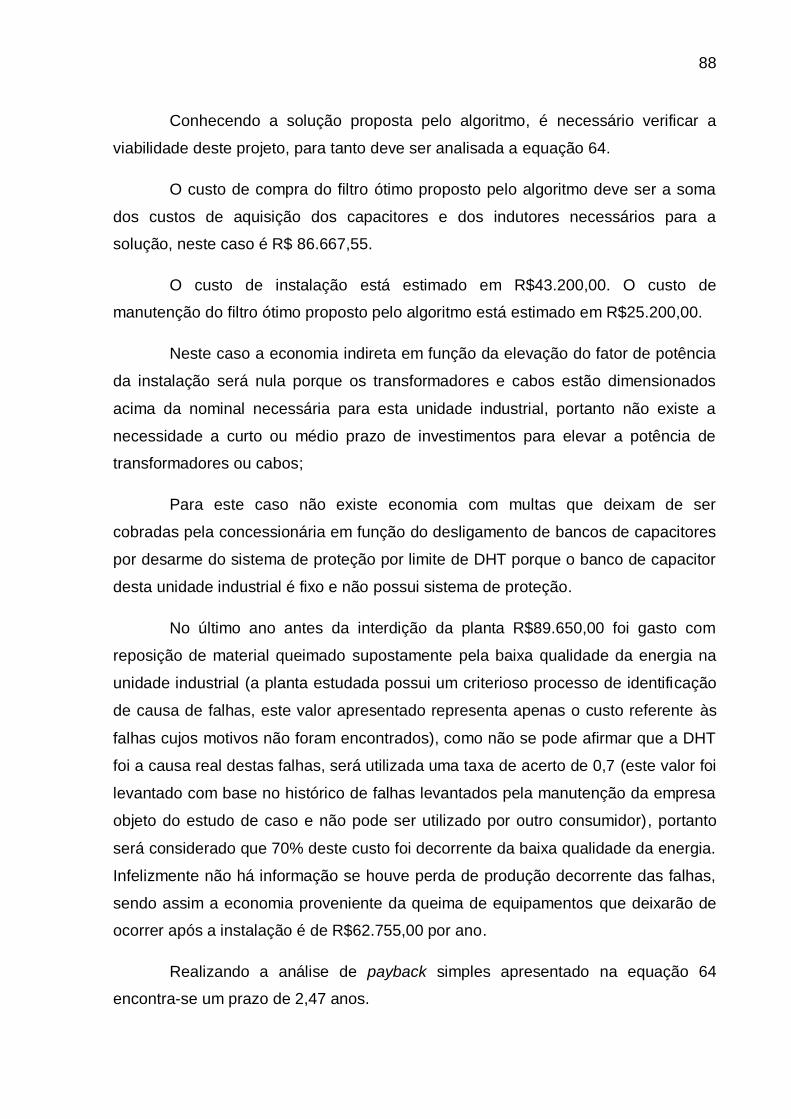
88
Conhecendo a solução proposta pelo algoritmo, é necessário verificar a
viabilidade deste projeto, para tanto deve ser analisada a equação 64.
O custo de compra do filtro ótimo proposto pelo algoritmo deve ser a soma
dos custos de aquisição dos capacitores e dos indutores necessários para a
solução, neste caso é R$ 86.667,55.
O custo de instalação está estimado em R$43.200,00. O custo de
manutenção do filtro ótimo proposto pelo algoritmo está estimado em R$25.200,00.
Neste caso a economia indireta em função da elevação do fator de potência
da instalação será nula porque os transformadores e cabos estão dimensionados
acima da nominal necessária para esta unidade industrial, portanto não existe a
necessidade a curto ou médio prazo de investimentos para elevar a potência de
transformadores ou cabos;
Para este caso não existe economia com multas que deixam de ser
cobradas pela concessionária em função do desligamento de bancos de capacitores
por desarme do sistema de proteção por limite de DHT porque o banco de capacitor
desta unidade industrial é fixo e não possui sistema de proteção.
No último ano antes da interdição da planta R$89.650,00 foi gasto com
reposição de material queimado supostamente pela baixa qualidade da energia na
unidade industrial (a planta estudada possui um criterioso processo de identificação
de causa de falhas, este valor apresentado representa apenas o custo referente às
falhas cujos motivos não foram encontrados), como não se pode afirmar que a DHT
foi a causa real destas falhas, será utilizada uma taxa de acerto de 0,7 (este valor foi
levantado com base no histórico de falhas levantados pela manutenção da empresa
objeto do estudo de caso e não pode ser utilizado por outro consumidor), portanto
será considerado que 70% deste custo foi decorrente da baixa qualidade da energia.
Infelizmente não há informação se houve perda de produção decorrente das falhas,
sendo assim a economia proveniente da queima de equipamentos que deixarão de
ocorrer após a instalação é de R$62.755,00 por ano.
Realizando a análise de payback simples apresentado na equação 64
encontra-se um prazo de 2,47 anos.
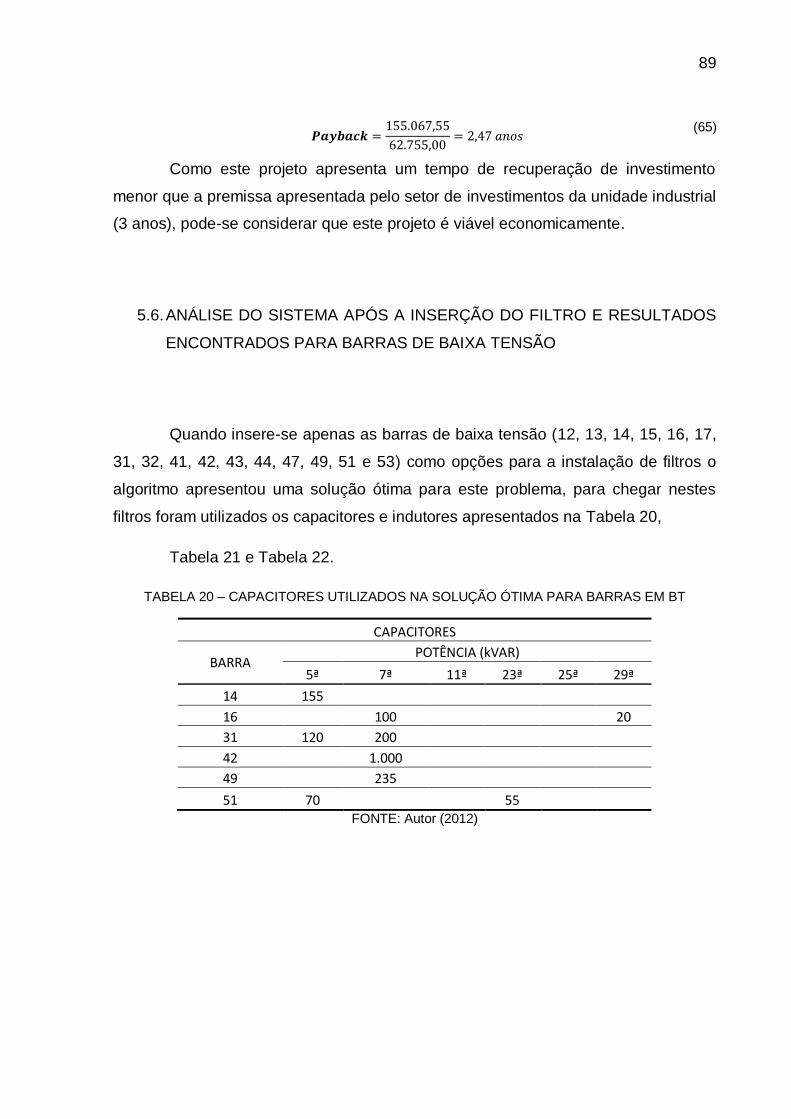
89
(65)
Como este projeto apresenta um tempo de recuperação de investimento
menor que a premissa apresentada pelo setor de investimentos da unidade industrial
(3 anos), pode-se considerar que este projeto é viável economicamente.
5.6. ANÁLISE DO SISTEMA APÓS A INSERÇÃO DO FILTRO E RESULTADOS
ENCONTRADOS PARA BARRAS DE BAIXA TENSÃO
Quando insere-se apenas as barras de baixa tensão (12, 13, 14, 15, 16, 17,
31, 32, 41, 42, 43, 44, 47, 49, 51 e 53) como opções para a instalação de filtros o
algoritmo apresentou uma solução ótima para este problema, para chegar nestes
filtros foram utilizados os capacitores e indutores apresentados na Tabela 20,
Tabela 21 e Tabela 22.
TABELA 20 – CAPACITORES UTILIZADOS NA SOLUÇÃO ÓTIMA PARA BARRAS EM BT
CAPACITORES
BARRA POTÊNCIA (kVAR)
5ª 7ª 11ª 23ª 25ª 29ª
14 155
16 100 20
31 120 200
42 1.000
49 235
51 70 55 FONTE: Autor (2012)
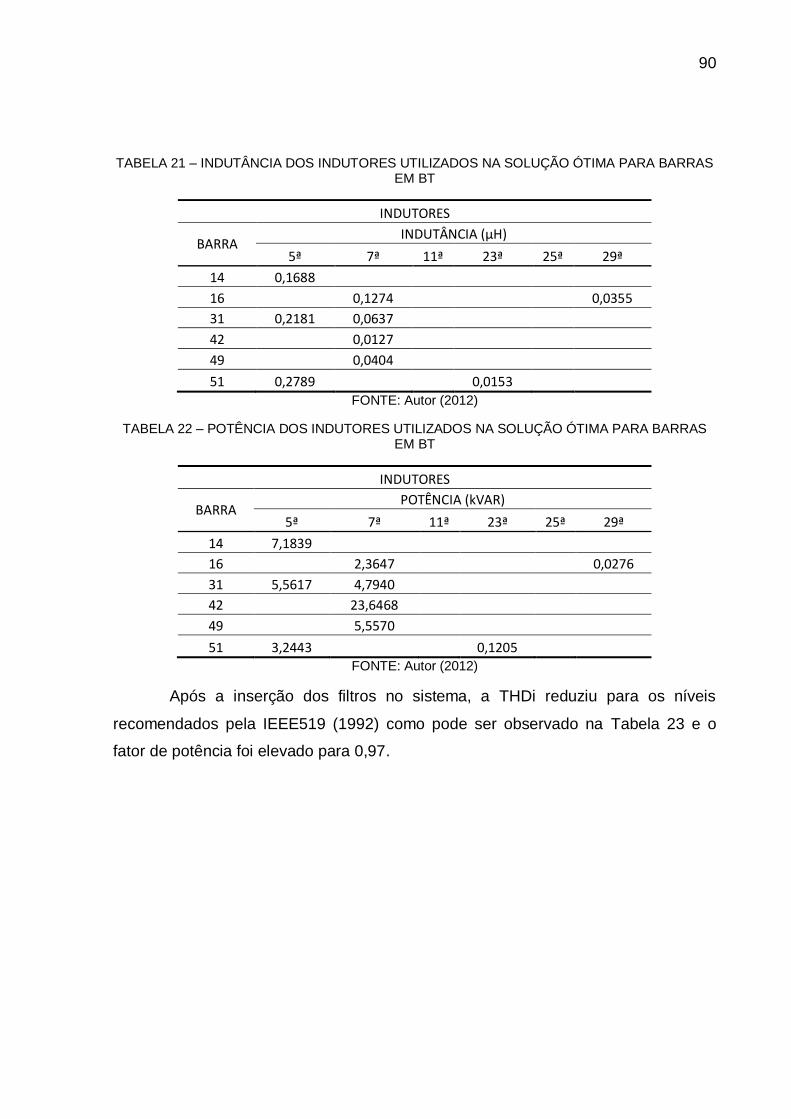
90
TABELA 21 – INDUTÂNCIA DOS INDUTORES UTILIZADOS NA SOLUÇÃO ÓTIMA PARA BARRAS
EM BT
INDUTORES
BARRA INDUTÂNCIA (µH)
5ª 7ª 11ª 23ª 25ª 29ª
14 0,1688
16 0,1274 0,0355
31 0,2181 0,0637
42 0,0127
49 0,0404
51 0,2789 0,0153 FONTE: Autor (2012)
TABELA 22 – POTÊNCIA DOS INDUTORES UTILIZADOS NA SOLUÇÃO ÓTIMA PARA BARRAS EM BT
INDUTORES
BARRA POTÊNCIA (kVAR)
5ª 7ª 11ª 23ª 25ª 29ª
14 7,1839
16 2,3647 0,0276
31 5,5617 4,7940
42 23,6468
49 5,5570
51 3,2443 0,1205 FONTE: Autor (2012)
Após a inserção dos filtros no sistema, a THDi reduziu para os níveis
recomendados pela IEEE519 (1992) como pode ser observado na Tabela 23 e o
fator de potência foi elevado para 0,97.
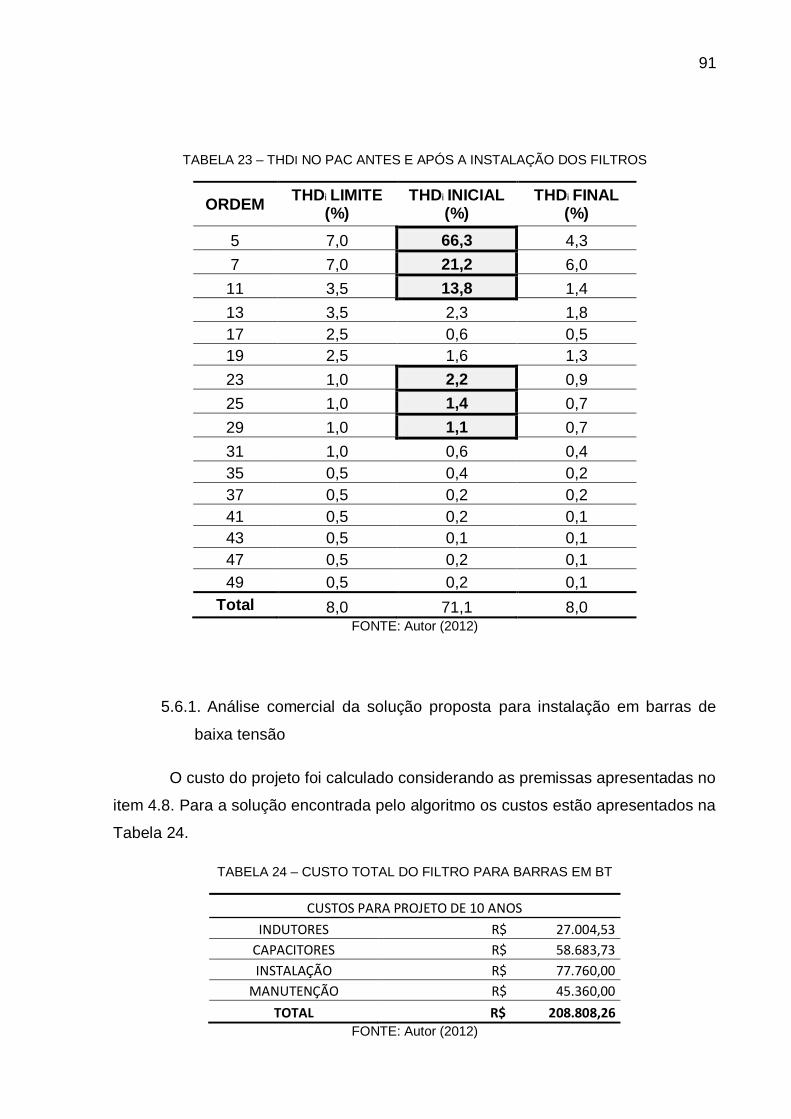
91
TABELA 23 – THDI NO PAC ANTES E APÓS A INSTALAÇÃO DOS FILTROS
ORDEM THDi LIMITE
(%) THDi INICIAL
(%) THDi FINAL
(%)
5 7,0 66,3 4,3
7 7,0 21,2 6,0
11 3,5 13,8 1,4
13 3,5 2,3 1,8
17 2,5 0,6 0,5
19 2,5 1,6 1,3
23 1,0 2,2 0,9
25 1,0 1,4 0,7
29 1,0 1,1 0,7
31 1,0 0,6 0,4
35 0,5 0,4 0,2
37 0,5 0,2 0,2
41 0,5 0,2 0,1
43 0,5 0,1 0,1
47 0,5 0,2 0,1
49 0,5 0,2 0,1
Total 8,0 71,1 8,0 FONTE: Autor (2012)
5.6.1. Análise comercial da solução proposta para instalação em barras de
baixa tensão
O custo do projeto foi calculado considerando as premissas apresentadas no
item 4.8. Para a solução encontrada pelo algoritmo os custos estão apresentados na
Tabela 24.
TABELA 24 – CUSTO TOTAL DO FILTRO PARA BARRAS EM BT
CUSTOS PARA PROJETO DE 10 ANOS
INDUTORES R$ 27.004,53
CAPACITORES R$ 58.683,73
INSTALAÇÃO R$ 77.760,00
MANUTENÇÃO R$ 45.360,00
TOTAL R$ 208.808,26 FONTE: Autor (2012)
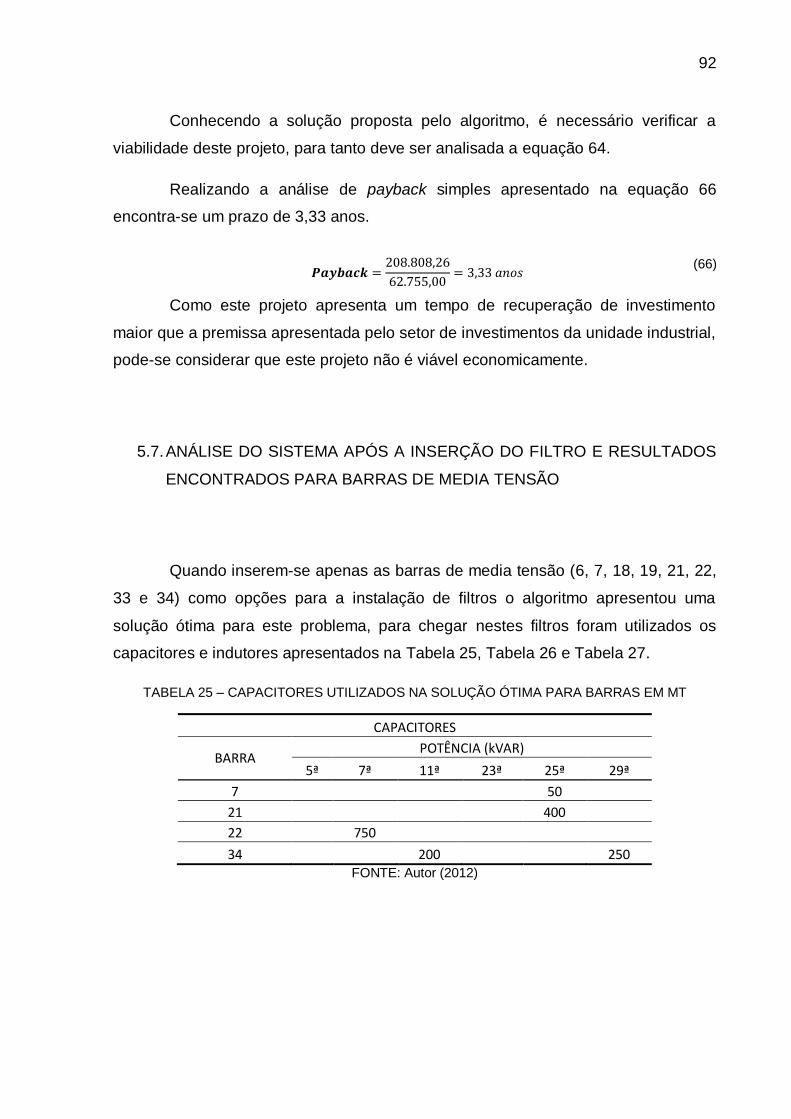
92
Conhecendo a solução proposta pelo algoritmo, é necessário verificar a
viabilidade deste projeto, para tanto deve ser analisada a equação 64.
Realizando a análise de payback simples apresentado na equação 66
encontra-se um prazo de 3,33 anos.
(66)
Como este projeto apresenta um tempo de recuperação de investimento
maior que a premissa apresentada pelo setor de investimentos da unidade industrial,
pode-se considerar que este projeto não é viável economicamente.
5.7. ANÁLISE DO SISTEMA APÓS A INSERÇÃO DO FILTRO E RESULTADOS
ENCONTRADOS PARA BARRAS DE MEDIA TENSÃO
Quando inserem-se apenas as barras de media tensão (6, 7, 18, 19, 21, 22,
33 e 34) como opções para a instalação de filtros o algoritmo apresentou uma
solução ótima para este problema, para chegar nestes filtros foram utilizados os
capacitores e indutores apresentados na Tabela 25, Tabela 26 e Tabela 27.
TABELA 25 – CAPACITORES UTILIZADOS NA SOLUÇÃO ÓTIMA PARA BARRAS EM MT
CAPACITORES
BARRA POTÊNCIA (kVAR)
5ª 7ª 11ª 23ª 25ª 29ª
7 50
21 400
22 750
34 200 250 FONTE: Autor (2012)
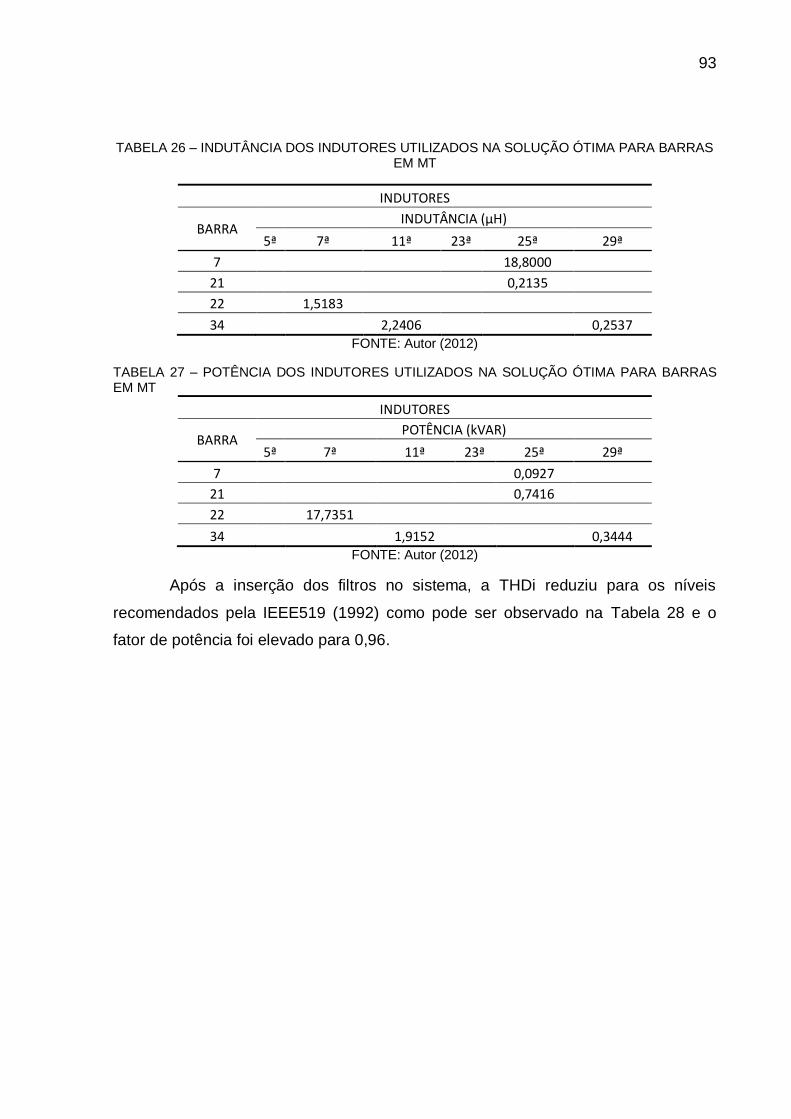
93
TABELA 26 – INDUTÂNCIA DOS INDUTORES UTILIZADOS NA SOLUÇÃO ÓTIMA PARA BARRAS EM MT
INDUTORES
BARRA INDUTÂNCIA (µH)
5ª 7ª 11ª 23ª 25ª 29ª
7 18,8000
21 0,2135
22 1,5183
34 2,2406 0,2537 FONTE: Autor (2012)
TABELA 27 – POTÊNCIA DOS INDUTORES UTILIZADOS NA SOLUÇÃO ÓTIMA PARA BARRAS EM MT
INDUTORES
BARRA POTÊNCIA (kVAR)
5ª 7ª 11ª 23ª 25ª 29ª
7 0,0927
21 0,7416
22 17,7351
34 1,9152 0,3444 FONTE: Autor (2012)
Após a inserção dos filtros no sistema, a THDi reduziu para os níveis
recomendados pela IEEE519 (1992) como pode ser observado na Tabela 28 e o
fator de potência foi elevado para 0,96.
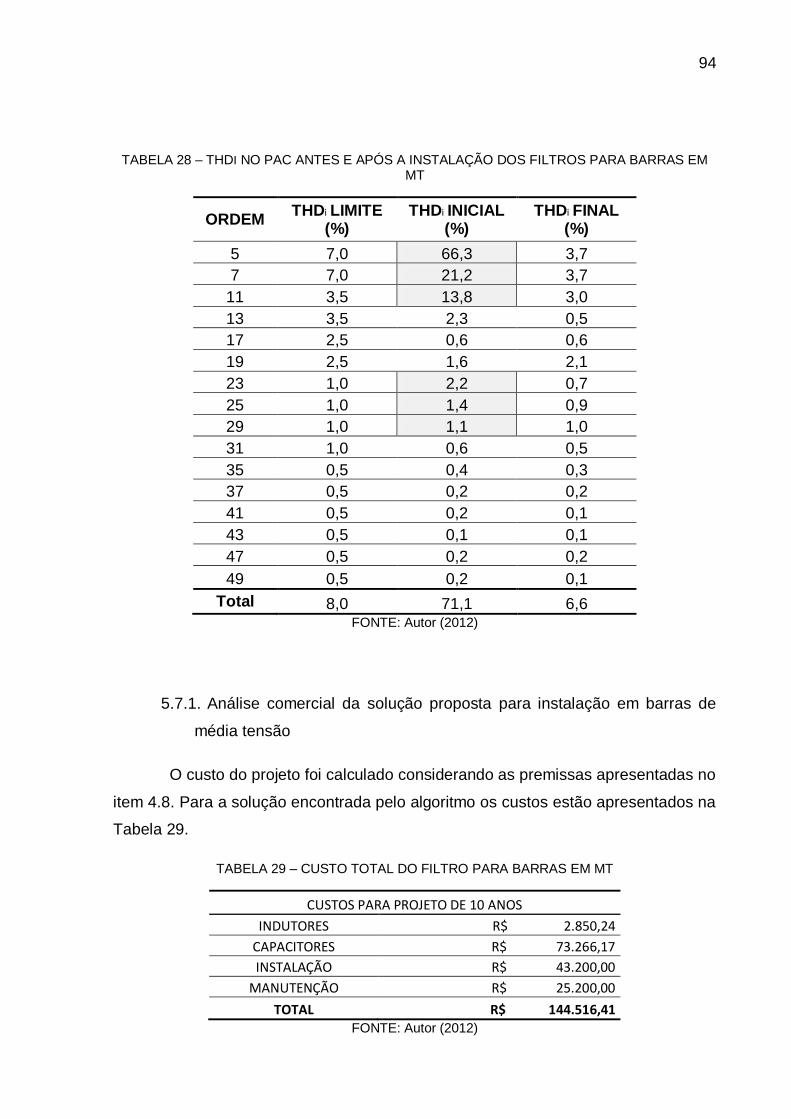
94
TABELA 28 – THDI NO PAC ANTES E APÓS A INSTALAÇÃO DOS FILTROS PARA BARRAS EM MT
ORDEM THDi LIMITE
(%) THDi INICIAL
(%) THDi FINAL
(%)
5 7,0 66,3 3,7
7 7,0 21,2 3,7
11 3,5 13,8 3,0
13 3,5 2,3 0,5
17 2,5 0,6 0,6
19 2,5 1,6 2,1
23 1,0 2,2 0,7
25 1,0 1,4 0,9
29 1,0 1,1 1,0
31 1,0 0,6 0,5
35 0,5 0,4 0,3
37 0,5 0,2 0,2
41 0,5 0,2 0,1
43 0,5 0,1 0,1
47 0,5 0,2 0,2
49 0,5 0,2 0,1
Total 8,0 71,1 6,6 FONTE: Autor (2012)
5.7.1. Análise comercial da solução proposta para instalação em barras de
média tensão
O custo do projeto foi calculado considerando as premissas apresentadas no
item 4.8. Para a solução encontrada pelo algoritmo os custos estão apresentados na
Tabela 29.
TABELA 29 – CUSTO TOTAL DO FILTRO PARA BARRAS EM MT
CUSTOS PARA PROJETO DE 10 ANOS
INDUTORES R$ 2.850,24
CAPACITORES R$ 73.266,17
INSTALAÇÃO R$ 43.200,00
MANUTENÇÃO R$ 25.200,00
TOTAL R$ 144.516,41 FONTE: Autor (2012)

95
Realizando a análise de payback simples apresentado na equação 67
encontra-se um prazo de 2,3 anos.
(67)
Sendo assim este projeto é viável economicamente.
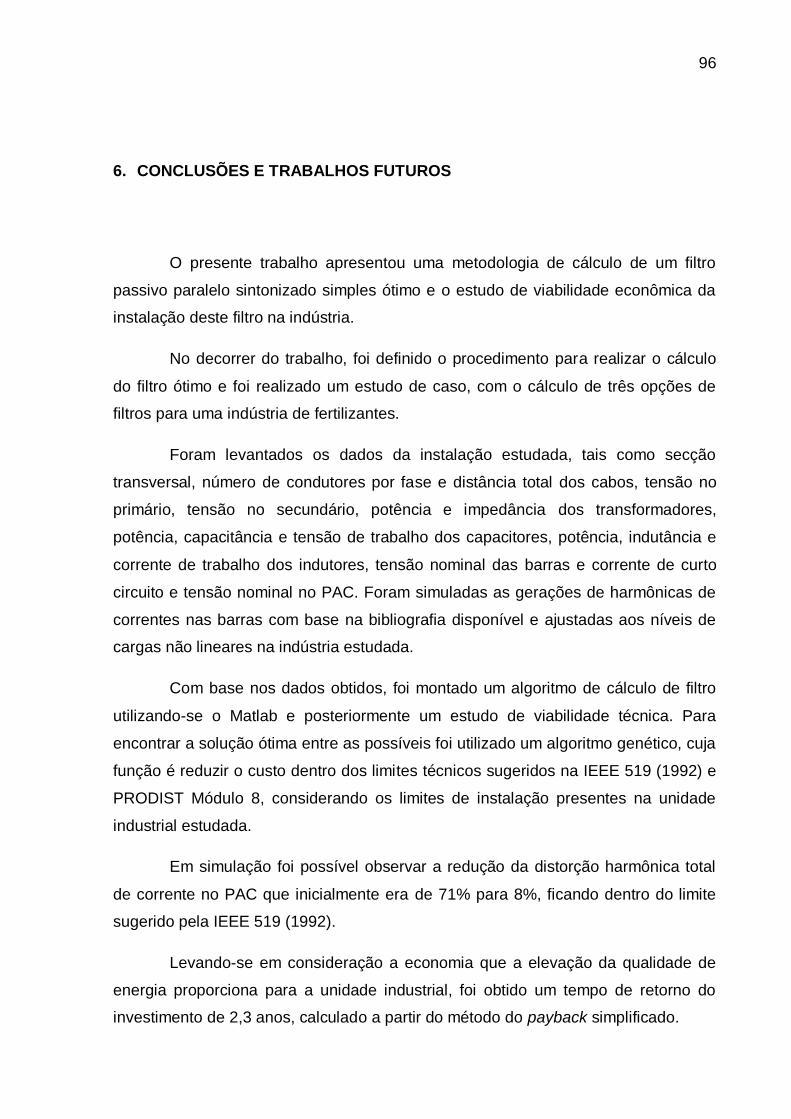
96
6. CONCLUSÕES E TRABALHOS FUTUROS
O presente trabalho apresentou uma metodologia de cálculo de um filtro
passivo paralelo sintonizado simples ótimo e o estudo de viabilidade econômica da
instalação deste filtro na indústria.
No decorrer do trabalho, foi definido o procedimento para realizar o cálculo
do filtro ótimo e foi realizado um estudo de caso, com o cálculo de três opções de
filtros para uma indústria de fertilizantes.
Foram levantados os dados da instalação estudada, tais como secção
transversal, número de condutores por fase e distância total dos cabos, tensão no
primário, tensão no secundário, potência e impedância dos transformadores,
potência, capacitância e tensão de trabalho dos capacitores, potência, indutância e
corrente de trabalho dos indutores, tensão nominal das barras e corrente de curto
circuito e tensão nominal no PAC. Foram simuladas as gerações de harmônicas de
correntes nas barras com base na bibliografia disponível e ajustadas aos níveis de
cargas não lineares na indústria estudada.
Com base nos dados obtidos, foi montado um algoritmo de cálculo de filtro
utilizando-se o Matlab e posteriormente um estudo de viabilidade técnica. Para
encontrar a solução ótima entre as possíveis foi utilizado um algoritmo genético, cuja
função é reduzir o custo dentro dos limites técnicos sugeridos na IEEE 519 (1992) e
PRODIST Módulo 8, considerando os limites de instalação presentes na unidade
industrial estudada.
Em simulação foi possível observar a redução da distorção harmônica total
de corrente no PAC que inicialmente era de 71% para 8%, ficando dentro do limite
sugerido pela IEEE 519 (1992).
Levando-se em consideração a economia que a elevação da qualidade de
energia proporciona para a unidade industrial, foi obtido um tempo de retorno do
investimento de 2,3 anos, calculado a partir do método do payback simplificado.
97
Para a empresa em estudo, o tempo máximo para retorno do investimento
inicial foi definido em 3 anos. Deste modo, com base nos resultados obtidos, é
possível afirmar que a instalação do filtro passivo paralelo sintonizado simples é
viável dos ponto de vista técnico e financeiro, principalmente se restringirmos as
barras disponíveis a instalação em média tensão.
Como trabalho futuro, sugere-se um levantamento mais detalhado dos
custos de aquisição dos capacitores e dos indutores. Recomenda-se a elaboração
de um procedimento para mensurar os custos provenientes da baixa qualidade de
energia de forma precisa, com a finalidade de facilitar o estudo de viabilidade
econômica. Outra opção seria a implementação deste algoritmo com outras formas
de otimizações heurísticas como busca tabu, recozimento simulado, colônia de
formigas, enxame de abelhas e busca harmônica. Pode-se ainda implementar na
solução a opção de utilização de filtro passivo paralelo duplo ou inserção do cálculo
do resistor do filtro. Pode-se, ainda, atualizar a metodologia proposta para ser
utilizada para o alocação de filtros ativos.
98
7. REFERÊNCIAS
AGÊNCIA NACIONAL DE ENERGIA ELÉTRICA. PRODIST Procedimentos de distribuição de energia elétrica no sistema elétrico nacional – Módulo 8.
Brasília, 2012.
ARRILLAGA, J.; EGUÍLUZ, L.I. Armónicos en Sistemas de Potência, Servicio de Publicaciones de la Universidad de Cantabria, 1994.
ARRILLAGA, J. Et al. Power System Harmonic Analysis. University of Canterbury, Christchurch, New Zealand. John Wiley & Sons Ltd, England, 1997.
BARBI, I. Eletrônica de Potência. Instituto de Eletrônica de Potência, Departamento de Engenharia Elétrica, UFSC, Florianópolis, 2006.
BOSE, B.K. Modern power electronics and ac drives. New Jersey: Prentice Hall,
2002.
BRASIL. RESOLUÇÃO N° 414, DE 9 DE SETEMBRO DE 2010. Diário Oficial [da] República Federativa [do] Brasil, Poder Executivo, Brasília, DF, 15 out, 2010. Seção 1, p. 115, v. 147, n. 177.
CALLEGARO, A. D. Et al. Influência de Inversores de Frequência na Qualidade da Energia Elétrica. Ijuí, 2007.
COMPANHIA PARANAENSE DE ENERGIA. Fator de potência: como transformá-lo em um fator de economia. Fator_potência.pdf. Disponível em: <http://www.copel.com/hpcopel/root/sitearquivos2.nsf/arquivos/fator_de_potência/$FILE/fator_potência.pdf>. Acesso em: 14 mai 2011.
DAS, J.C.; Passive Filters-Potentialities and Limitations. Amec Inc. Atlanta,
Georgia, 2003.
ELECTRICAL TRANSIENT ANALYZER PROGRAM. ETAP. Disponível em:
<www.etap.com>. Acesso em: 14 mai 2011.
ELETROSIM Inversores de Frequência. Disponível em: <
http://eletrosim.blogspot.com.br/2012/05/inversores-de-frequencia.html>. Acessado em: 19 mai 2012.
GRAINGER, J.; STEVENSON, W. Power Systems Analysis. New York: McGraw-Hill, 1994.
GONZALEZ, D.A.; MCCALL, J.C. Design of Filters to Reduce Harmonic Distortion in Industrial Power Systems. IEEE Transactions on industry applications, vol. 1A-23, n. 3, p. 504 maio/junho 1987.
HOEVENAARS, T.; LEDOUX, K.; COLOSINO, M. Interpreting IEEE Std 519 and Meeting its Harmonic Limits in VFD Applications. IEEE Petroleum and Chemical
Industry Conference, p. 145-150, 2003.
99
HOLLAND, J.H. Adaptation in Natural and Artificial Systems. University of
Michigan Press, 1975.
INSTITUTE OF ELECTRICAL AND ELECTRONICS ENGINEERS. IEEE Guide for Application and Specification of Harmonic Filters, The Institute of Electrical and Electronics Engineers, Inc., New York, 2003.
INSTITUTE OF ELECTRICAL AND ELECTRONICS ENGINEERS. IEEE Recommended Practices and Requirements for Harmonic Control in Electrical Power Systems – IEEE 519 - 1992, Institute of Electrical and Electronics Engineers, Inc., New York,1993.
KIMBARK, E. W. Direct Current Transmission, Vol I, John Wiley & Sons Inc., 1971.
LIN, K.; LIN, M.; LIN, T. An Advanced Computer Code for Single-Tuned Harmonic Filter Design. IEEE Transactions on industry applications, vol. 34, n. 4, p.
640 julho/agosto 1998.
MAGALHÃES, C. M. S.; SILVA, R. D. S.; BEZERRA, U. H.; TOSTES, E. L. Análise Harmônica dos Impactos de Conversores de Freqüência em uma Indústria de Petróleo, Universidade Federal do Pará – CT/CEEC, Belém 2009
MAGALHÃES, C. M. S. Et al. Análise Harmônica dos Impactos de Conversores de Freqüência em uma Indústria de Petróleo. III Simpósio Brasileiro de Sistemas
Elétricos. Belém, 2010.
MAMEDE FILHO, J. Instalações Elétricas Industriais. LTC, 2002.
Mathworks. Matlab. Disponível em: <www.mathworks.com>. Acesso em: 14 mai
2011.
MCGRANAGHAN, M.F.; MUELLER, D.R. Designing Harmonic Filters for Adjustable-Speed Drives to Comply with IEEE-519 Harmonic Limits. IEEE Transactions on Industry Applications, vol. 35, no. 2, March/April, 1999.
MUSKENS, C.; BOHAICHUK, D.; XU, W. Mitigation of Harmonics in Oil Field Electric Systems Using Multiple Low Voltage Filters. Canadá, 2000.
NASSIF, A.B.; XU, W. Passive Harmonic Filters for Medium-Voltage Industrial Systems: Practical Considerations and Topology Analysis, IEEE, 2007.
OPERADOR NACIONAL DO SISTEMA ELÉTRICO. Plano da operação energética 2012/2016 PEN 2012 Sumario Executivo. 2012
PORRAS, C.A.R.; NARANJO, M.A.; GALLEGO R.A. Análisis de Armónicos en Sistemas Eléctricos, Grupo de Investigación em Planeamiento de Sistemas
Eléctricos Universidad Tecnológica de Pereira, 2003.
SÃO JOSÉ, B. et al. Aplicação de Filtros Harmônicos Passivos em um Sistema de Acionamento de Máquinas Motrizes. IX INDUSCON IEEE/IAS International Conference on Industry Applications. São Paulo, 2010.
100
SEGURA, S. Alocação de capacitores em redes de distribuição primárias e secundárias incluindo restrições de ressonância. UNICAMP, 2010.
SEGURA, S.; SILVA, L.C.P.; ROMERO, R; SALLES, D. Strategic capacitor placement in distribution systems by minimisation of harmonics amplification because of resonance. IET Generation, Transmition & Distribution, 2012.
SYSTEMS ANALYSIS, INC. SKM PowerTools. Disponível em: < www.skm.com>. Acesso em: 14 mai 2011.
TASK FORCE ON HARMONIC MODELING AND SIMULATION, IEEE POWER ENG. SOC. T&D COMMITTEE Impact of Aggregate Linear Load Modeling on Harmonic Analysis: A Comparison of Common Practice and Analytical Models. IEEE Transaction on power delivery, vol. 18, n. 2, 2003
WEG S.A. WEG Motores. Disponível em <http://catalogo.weg.com.br/files/wegnet/WEG-guia-de-especificacao-de-motores-eletricos-50032749-manual-portugues-br.pdf>. Acesso em: 12 ago 2012.
101
APÊNDICE
APÊNDICE 1 – CODIFICAÇÃO DOS CAPACITORES PARA BARRAS DE BAIXA
TENSÃO (2012) ............................................................................... 102
APÊNDICE 2 – CODIFICAÇÃO DOS CAPACITORES PARA BARRAS DE MÉDIA
TENSÃO (2012) ............................................................................... 103
APÊNDICE 3 – LISTA DE CARGAS CCM TR-T3 (2012) ........................................ 104
APÊNDICE 4 – LISTA DE CARGAS CCM TR-T2 (2012) ........................................ 106
APÊNDICE 5 – LISTA DE CARGAS CCM TR-T1 (2012) ........................................ 108
APÊNDICE 6 – LISTA DE CARGAS CCM 5 (2012) ................................................ 110
APÊNDICE 7 – LISTA DE CARGAS CCM 4 (2012) ................................................ 112
APÊNDICE 8 – LISTA DE CARGAS CCM 3 (2012) ................................................ 113
APÊNDICE 9 – LISTA DE CARGAS CCM GERAL (2012)...................................... 117
APÊNDICE 10 – POTÊNCIA EM 60 HZ DOS CAPACITORES ATÉ 1 KV
DISPONÍVEIS NO MERCADO E CUSTO DE COMPRA – VALOR DE
MERCADO DO DIA 20/03/2013 COM DOLAR A R$2,03 (2013) .... 119
APÊNDICE 11 - POTÊNCIA EM 60 HZ DOS CAPACITORES ACIMA DE 1 KV
DISPONÍVEIS NO MERCADO E CUSTO DE COMPRA – VALOR DE
MERCADO DO DIA 20/03/2013 COM DOLAR A R$2,03 (2013) .... 120
APÊNDICE 12 - VALORES DE CUSTO PARA INDUTORES COM ISOLAÇÃO DE 1
KV - VALOR DE MERCADO DO DIA 20/03/2013 COM DOLAR A
R$2,03 (2013) .................................................................................. 121
APÊNDICE 13 – UNIFILAR RESUMIDO DA UNIDADE INDUSTRIAL (2013) ........ 122
APÊNDICE 14 – PLANILHA DE_PARA .................................................................. 123
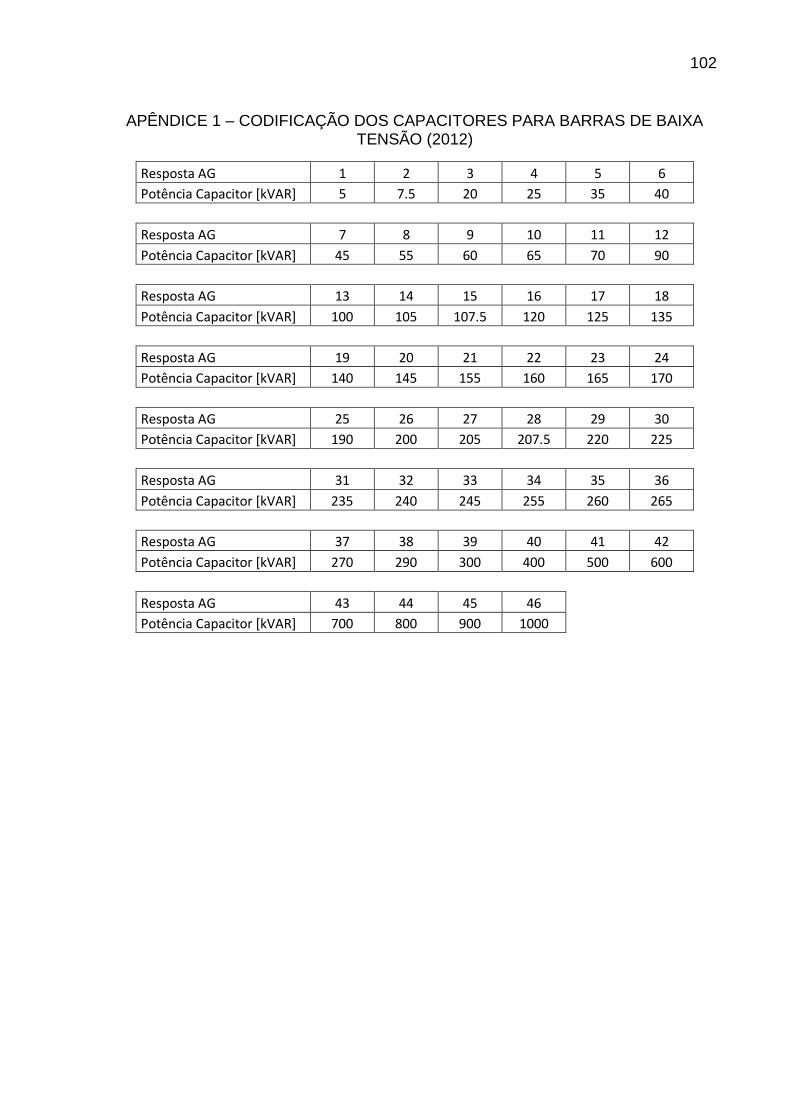
102
APÊNDICE 1 – CODIFICAÇÃO DOS CAPACITORES PARA BARRAS DE BAIXA TENSÃO (2012)
Resposta AG 1 2 3 4 5 6
Potência Capacitor [kVAR] 5 7.5 20 25 35 40
Resposta AG 7 8 9 10 11 12
Potência Capacitor [kVAR] 45 55 60 65 70 90
Resposta AG 13 14 15 16 17 18
Potência Capacitor [kVAR] 100 105 107.5 120 125 135
Resposta AG 19 20 21 22 23 24
Potência Capacitor [kVAR] 140 145 155 160 165 170
Resposta AG 25 26 27 28 29 30
Potência Capacitor [kVAR] 190 200 205 207.5 220 225
Resposta AG 31 32 33 34 35 36
Potência Capacitor [kVAR] 235 240 245 255 260 265
Resposta AG 37 38 39 40 41 42
Potência Capacitor [kVAR] 270 290 300 400 500 600
Resposta AG 43 44 45 46
Potência Capacitor [kVAR] 700 800 900 1000
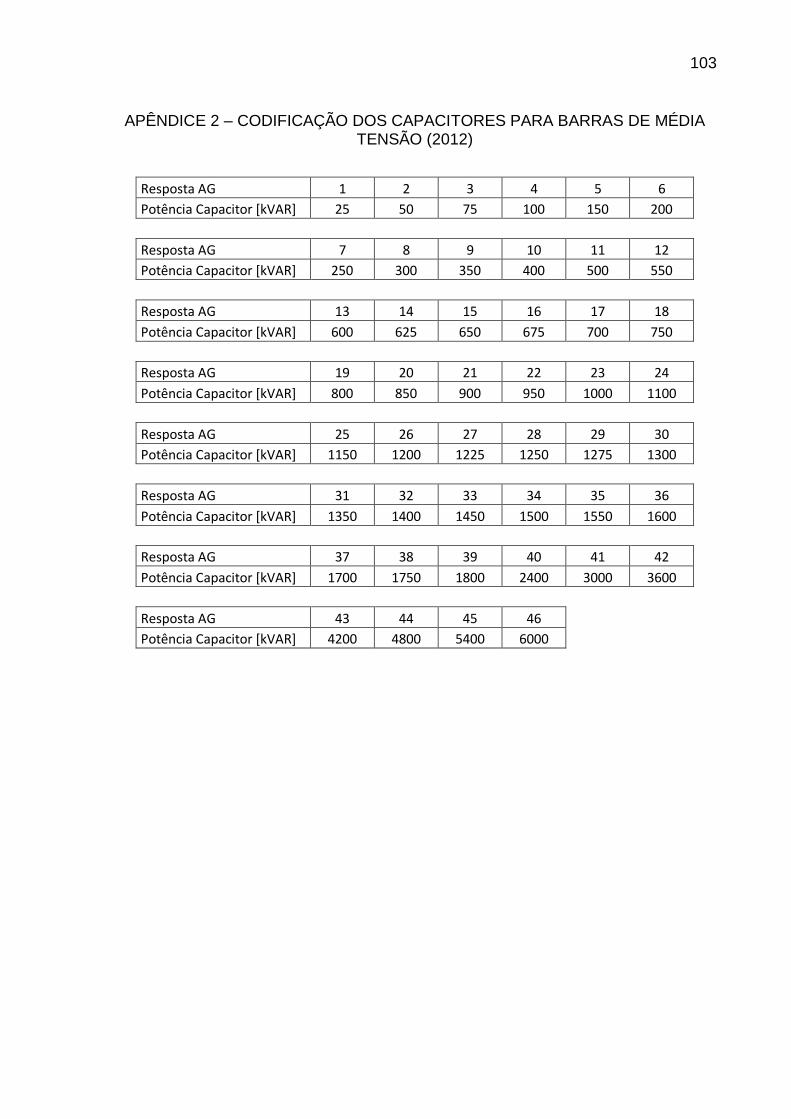
103
APÊNDICE 2 – CODIFICAÇÃO DOS CAPACITORES PARA BARRAS DE MÉDIA TENSÃO (2012)
Resposta AG 1 2 3 4 5 6
Potência Capacitor [kVAR] 25 50 75 100 150 200
Resposta AG 7 8 9 10 11 12
Potência Capacitor [kVAR] 250 300 350 400 500 550
Resposta AG 13 14 15 16 17 18
Potência Capacitor [kVAR] 600 625 650 675 700 750
Resposta AG 19 20 21 22 23 24
Potência Capacitor [kVAR] 800 850 900 950 1000 1100
Resposta AG 25 26 27 28 29 30
Potência Capacitor [kVAR] 1150 1200 1225 1250 1275 1300
Resposta AG 31 32 33 34 35 36
Potência Capacitor [kVAR] 1350 1400 1450 1500 1550 1600
Resposta AG 37 38 39 40 41 42
Potência Capacitor [kVAR] 1700 1750 1800 2400 3000 3600
Resposta AG 43 44 45 46
Potência Capacitor [kVAR] 4200 4800 5400 6000
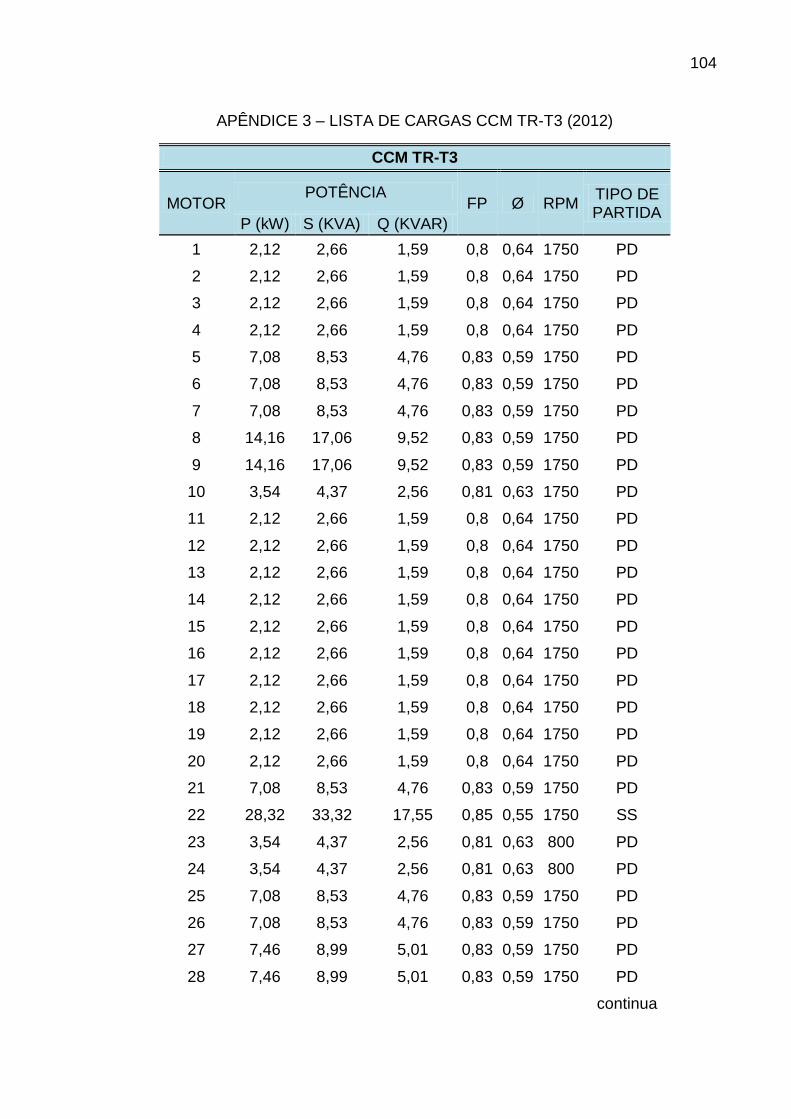
104
APÊNDICE 3 – LISTA DE CARGAS CCM TR-T3 (2012)
CCM TR-T3
MOTOR POTÊNCIA
FP Ø RPM TIPO DE PARTIDA
P (kW) S (KVA) Q (KVAR)
1 2,12 2,66 1,59 0,8 0,64 1750 PD
2 2,12 2,66 1,59 0,8 0,64 1750 PD
3 2,12 2,66 1,59 0,8 0,64 1750 PD
4 2,12 2,66 1,59 0,8 0,64 1750 PD
5 7,08 8,53 4,76 0,83 0,59 1750 PD
6 7,08 8,53 4,76 0,83 0,59 1750 PD
7 7,08 8,53 4,76 0,83 0,59 1750 PD
8 14,16 17,06 9,52 0,83 0,59 1750 PD
9 14,16 17,06 9,52 0,83 0,59 1750 PD
10 3,54 4,37 2,56 0,81 0,63 1750 PD
11 2,12 2,66 1,59 0,8 0,64 1750 PD
12 2,12 2,66 1,59 0,8 0,64 1750 PD
13 2,12 2,66 1,59 0,8 0,64 1750 PD
14 2,12 2,66 1,59 0,8 0,64 1750 PD
15 2,12 2,66 1,59 0,8 0,64 1750 PD
16 2,12 2,66 1,59 0,8 0,64 1750 PD
17 2,12 2,66 1,59 0,8 0,64 1750 PD
18 2,12 2,66 1,59 0,8 0,64 1750 PD
19 2,12 2,66 1,59 0,8 0,64 1750 PD
20 2,12 2,66 1,59 0,8 0,64 1750 PD
21 7,08 8,53 4,76 0,83 0,59 1750 PD
22 28,32 33,32 17,55 0,85 0,55 1750 SS
23 3,54 4,37 2,56 0,81 0,63 800 PD
24 3,54 4,37 2,56 0,81 0,63 800 PD
25 7,08 8,53 4,76 0,83 0,59 1750 PD
26 7,08 8,53 4,76 0,83 0,59 1750 PD
27 7,46 8,99 5,01 0,83 0,59 1750 PD
28 7,46 8,99 5,01 0,83 0,59 1750 PD
continua
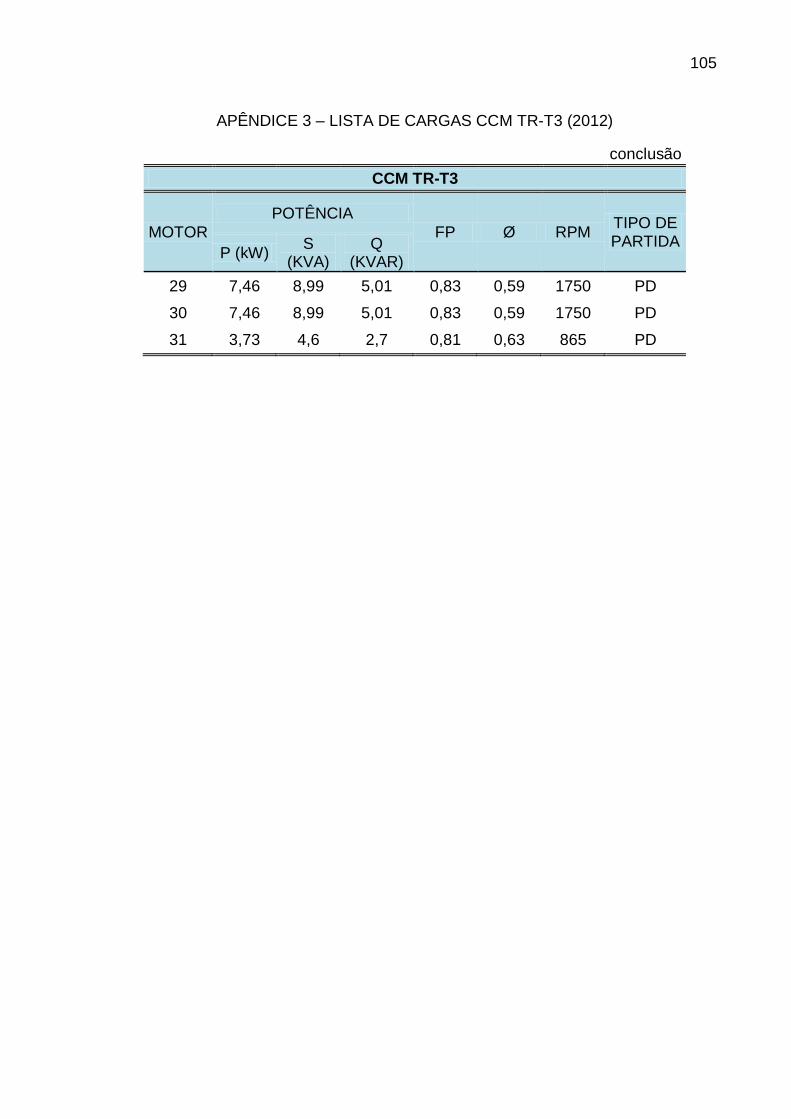
105
APÊNDICE 3 – LISTA DE CARGAS CCM TR-T3 (2012)
conclusão
CCM TR-T3
MOTOR
POTÊNCIA
FP Ø RPM TIPO DE PARTIDA
P (kW) S
(KVA) Q
(KVAR)
29 7,46 8,99 5,01 0,83 0,59 1750 PD
30 7,46 8,99 5,01 0,83 0,59 1750 PD
31 3,73 4,6 2,7 0,81 0,63 865 PD
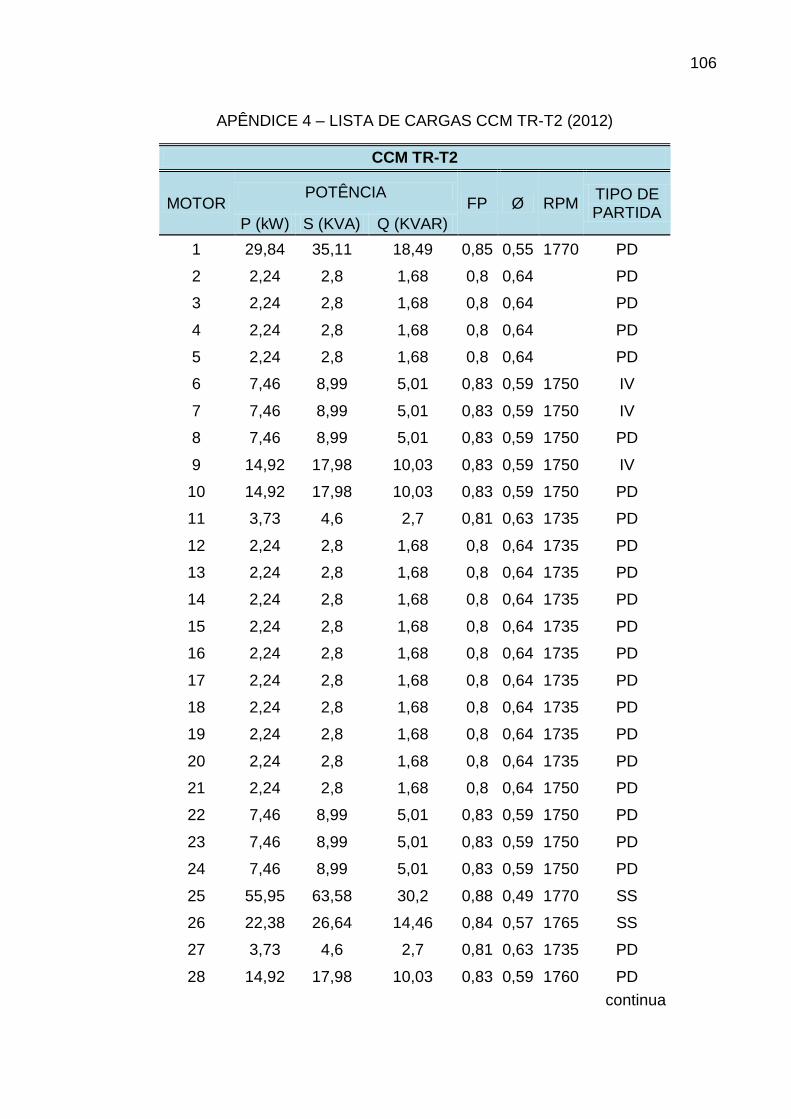
106
APÊNDICE 4 – LISTA DE CARGAS CCM TR-T2 (2012)
CCM TR-T2
MOTOR POTÊNCIA
FP Ø RPM TIPO DE PARTIDA
P (kW) S (KVA) Q (KVAR)
1 29,84 35,11 18,49 0,85 0,55 1770 PD
2 2,24 2,8 1,68 0,8 0,64
PD
3 2,24 2,8 1,68 0,8 0,64
PD
4 2,24 2,8 1,68 0,8 0,64
PD
5 2,24 2,8 1,68 0,8 0,64
PD
6 7,46 8,99 5,01 0,83 0,59 1750 IV
7 7,46 8,99 5,01 0,83 0,59 1750 IV
8 7,46 8,99 5,01 0,83 0,59 1750 PD
9 14,92 17,98 10,03 0,83 0,59 1750 IV
10 14,92 17,98 10,03 0,83 0,59 1750 PD
11 3,73 4,6 2,7 0,81 0,63 1735 PD
12 2,24 2,8 1,68 0,8 0,64 1735 PD
13 2,24 2,8 1,68 0,8 0,64 1735 PD
14 2,24 2,8 1,68 0,8 0,64 1735 PD
15 2,24 2,8 1,68 0,8 0,64 1735 PD
16 2,24 2,8 1,68 0,8 0,64 1735 PD
17 2,24 2,8 1,68 0,8 0,64 1735 PD
18 2,24 2,8 1,68 0,8 0,64 1735 PD
19 2,24 2,8 1,68 0,8 0,64 1735 PD
20 2,24 2,8 1,68 0,8 0,64 1735 PD
21 2,24 2,8 1,68 0,8 0,64 1750 PD
22 7,46 8,99 5,01 0,83 0,59 1750 PD
23 7,46 8,99 5,01 0,83 0,59 1750 PD
24 7,46 8,99 5,01 0,83 0,59 1750 PD
25 55,95 63,58 30,2 0,88 0,49 1770 SS
26 22,38 26,64 14,46 0,84 0,57 1765 SS
27 3,73 4,6 2,7 0,81 0,63 1735 PD
28 14,92 17,98 10,03 0,83 0,59 1760 PD
continua
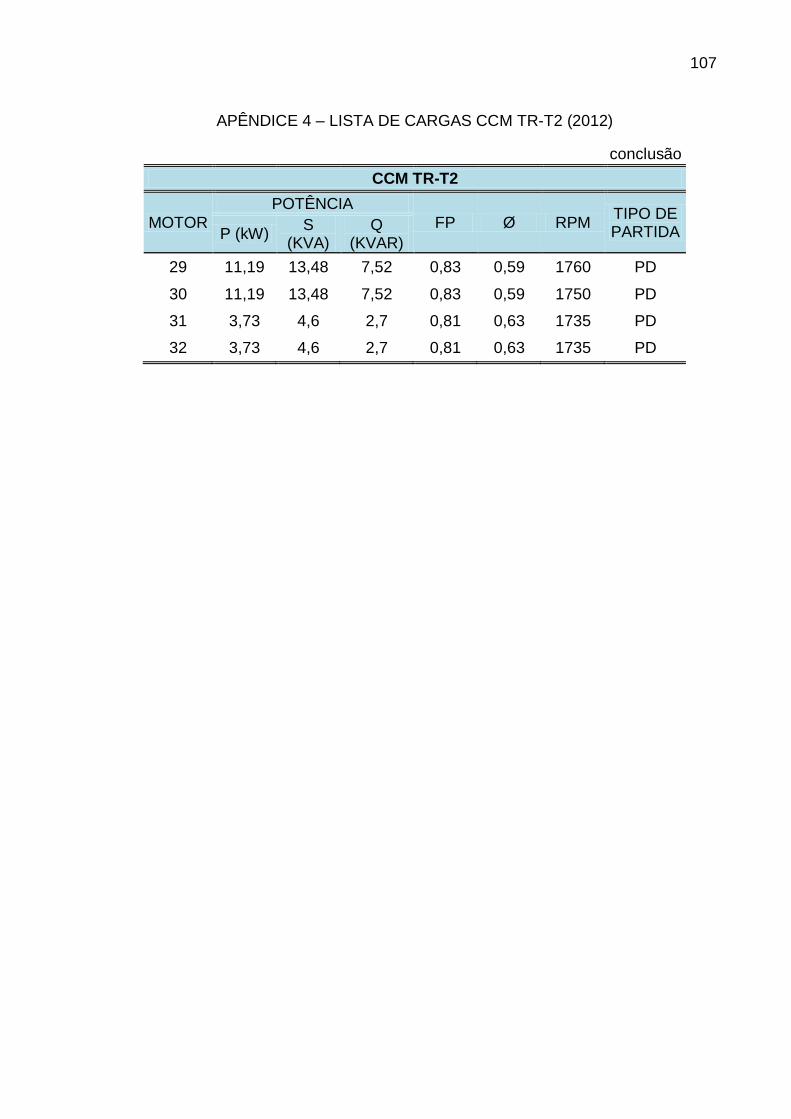
107
APÊNDICE 4 – LISTA DE CARGAS CCM TR-T2 (2012)
conclusão
CCM TR-T2
MOTOR
POTÊNCIA
FP Ø RPM TIPO DE PARTIDA P (kW)
S (KVA)
Q (KVAR)
29 11,19 13,48 7,52 0,83 0,59 1760 PD
30 11,19 13,48 7,52 0,83 0,59 1750 PD
31 3,73 4,6 2,7 0,81 0,63 1735 PD
32 3,73 4,6 2,7 0,81 0,63 1735 PD
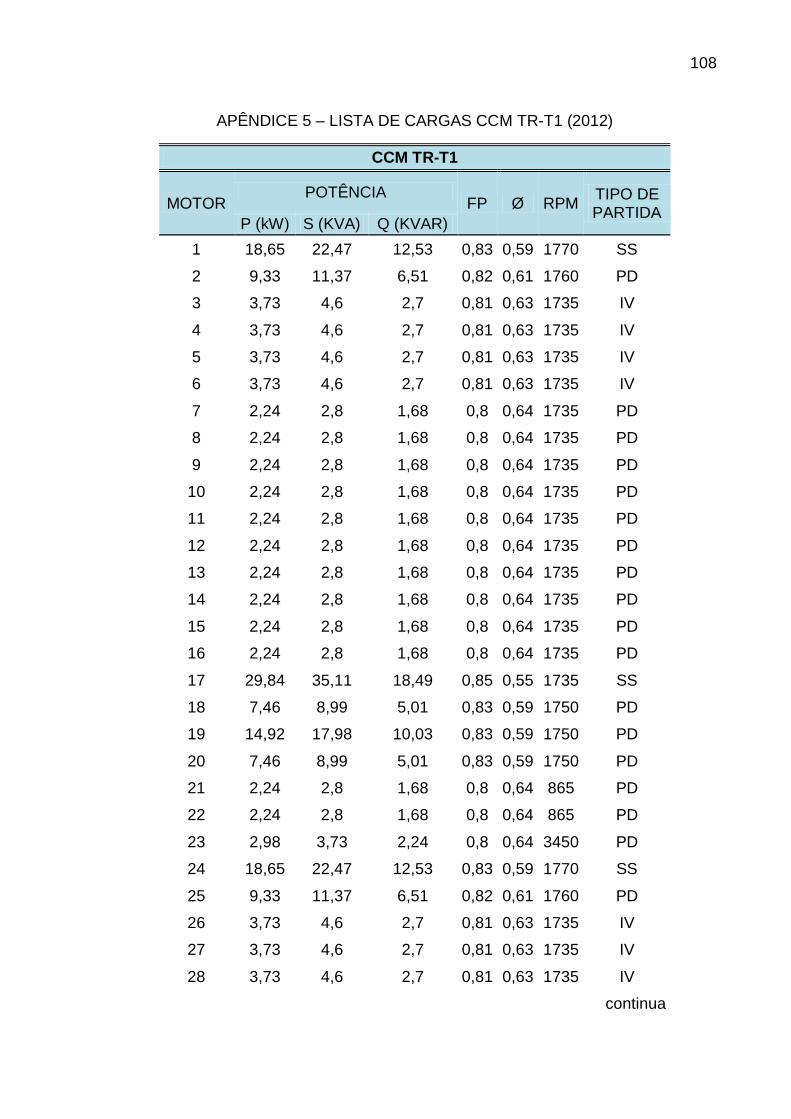
108
APÊNDICE 5 – LISTA DE CARGAS CCM TR-T1 (2012)
CCM TR-T1
MOTOR POTÊNCIA
FP Ø RPM TIPO DE PARTIDA
P (kW) S (KVA) Q (KVAR)
1 18,65 22,47 12,53 0,83 0,59 1770 SS
2 9,33 11,37 6,51 0,82 0,61 1760 PD
3 3,73 4,6 2,7 0,81 0,63 1735 IV
4 3,73 4,6 2,7 0,81 0,63 1735 IV
5 3,73 4,6 2,7 0,81 0,63 1735 IV
6 3,73 4,6 2,7 0,81 0,63 1735 IV
7 2,24 2,8 1,68 0,8 0,64 1735 PD
8 2,24 2,8 1,68 0,8 0,64 1735 PD
9 2,24 2,8 1,68 0,8 0,64 1735 PD
10 2,24 2,8 1,68 0,8 0,64 1735 PD
11 2,24 2,8 1,68 0,8 0,64 1735 PD
12 2,24 2,8 1,68 0,8 0,64 1735 PD
13 2,24 2,8 1,68 0,8 0,64 1735 PD
14 2,24 2,8 1,68 0,8 0,64 1735 PD
15 2,24 2,8 1,68 0,8 0,64 1735 PD
16 2,24 2,8 1,68 0,8 0,64 1735 PD
17 29,84 35,11 18,49 0,85 0,55 1735 SS
18 7,46 8,99 5,01 0,83 0,59 1750 PD
19 14,92 17,98 10,03 0,83 0,59 1750 PD
20 7,46 8,99 5,01 0,83 0,59 1750 PD
21 2,24 2,8 1,68 0,8 0,64 865 PD
22 2,24 2,8 1,68 0,8 0,64 865 PD
23 2,98 3,73 2,24 0,8 0,64 3450 PD
24 18,65 22,47 12,53 0,83 0,59 1770 SS
25 9,33 11,37 6,51 0,82 0,61 1760 PD
26 3,73 4,6 2,7 0,81 0,63 1735 IV
27 3,73 4,6 2,7 0,81 0,63 1735 IV
28 3,73 4,6 2,7 0,81 0,63 1735 IV
continua
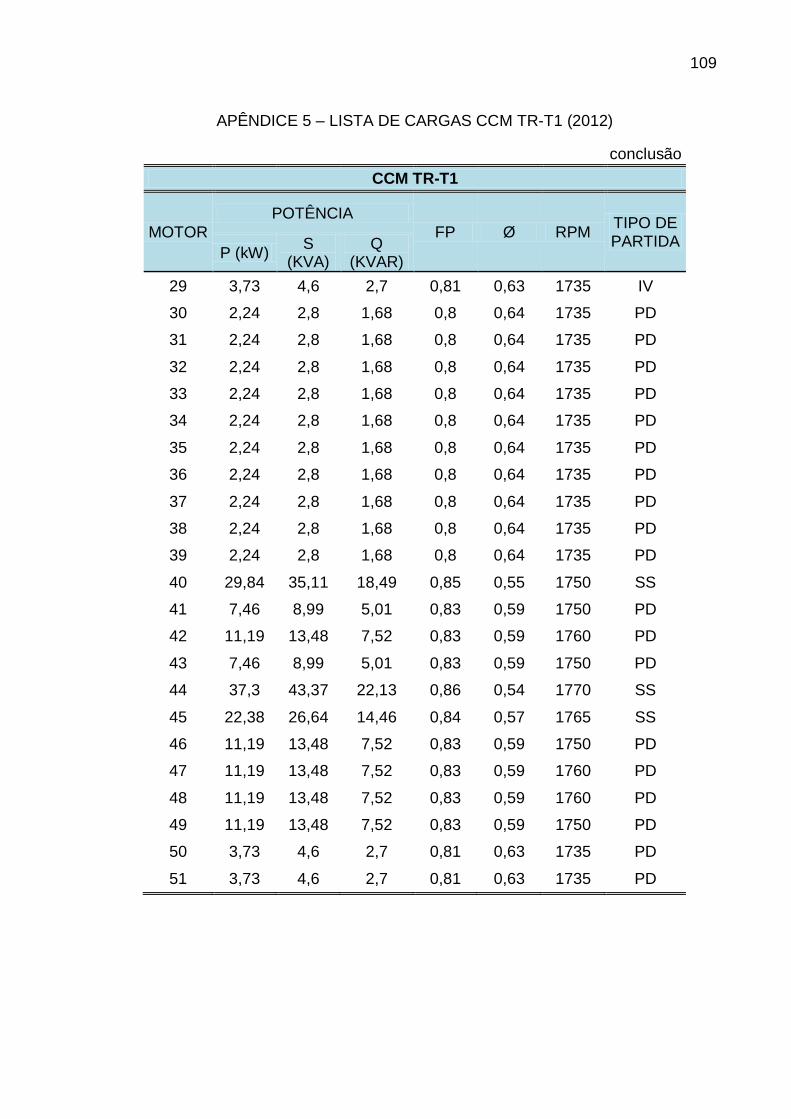
109
APÊNDICE 5 – LISTA DE CARGAS CCM TR-T1 (2012)
conclusão
CCM TR-T1
MOTOR
POTÊNCIA
FP Ø RPM TIPO DE PARTIDA
P (kW) S
(KVA) Q
(KVAR)
29 3,73 4,6 2,7 0,81 0,63 1735 IV
30 2,24 2,8 1,68 0,8 0,64 1735 PD
31 2,24 2,8 1,68 0,8 0,64 1735 PD
32 2,24 2,8 1,68 0,8 0,64 1735 PD
33 2,24 2,8 1,68 0,8 0,64 1735 PD
34 2,24 2,8 1,68 0,8 0,64 1735 PD
35 2,24 2,8 1,68 0,8 0,64 1735 PD
36 2,24 2,8 1,68 0,8 0,64 1735 PD
37 2,24 2,8 1,68 0,8 0,64 1735 PD
38 2,24 2,8 1,68 0,8 0,64 1735 PD
39 2,24 2,8 1,68 0,8 0,64 1735 PD
40 29,84 35,11 18,49 0,85 0,55 1750 SS
41 7,46 8,99 5,01 0,83 0,59 1750 PD
42 11,19 13,48 7,52 0,83 0,59 1760 PD
43 7,46 8,99 5,01 0,83 0,59 1750 PD
44 37,3 43,37 22,13 0,86 0,54 1770 SS
45 22,38 26,64 14,46 0,84 0,57 1765 SS
46 11,19 13,48 7,52 0,83 0,59 1750 PD
47 11,19 13,48 7,52 0,83 0,59 1760 PD
48 11,19 13,48 7,52 0,83 0,59 1760 PD
49 11,19 13,48 7,52 0,83 0,59 1750 PD
50 3,73 4,6 2,7 0,81 0,63 1735 PD
51 3,73 4,6 2,7 0,81 0,63 1735 PD
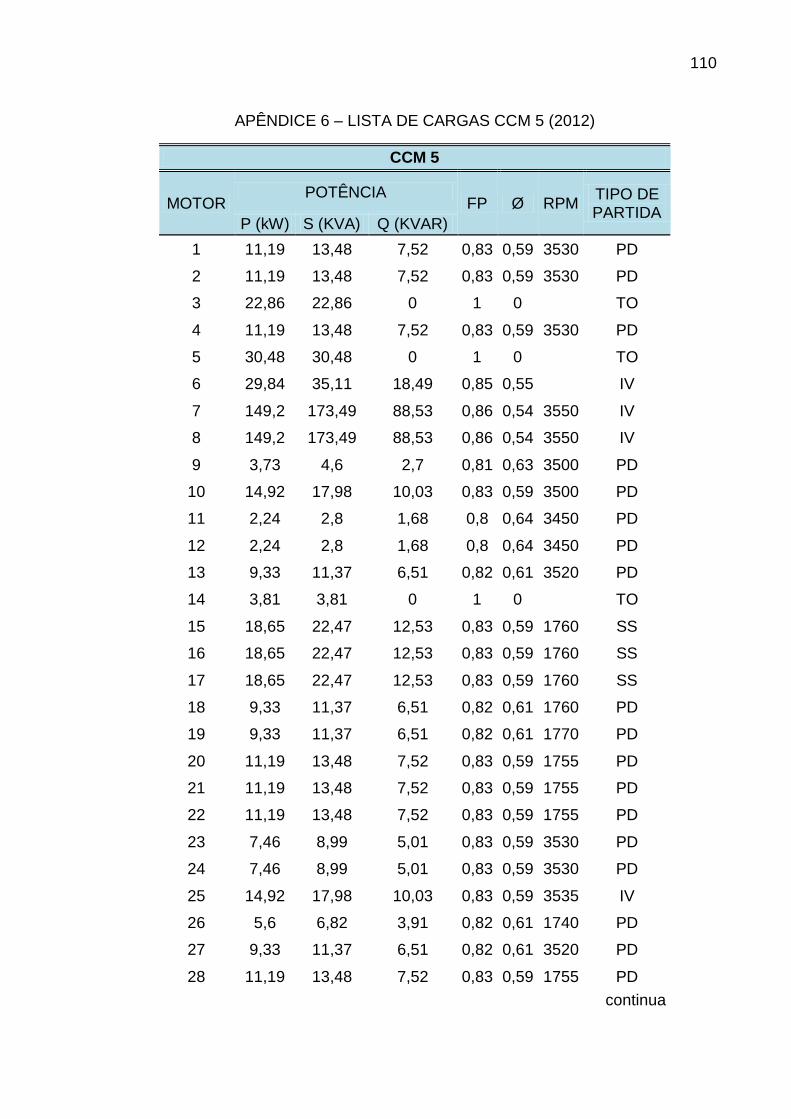
110
APÊNDICE 6 – LISTA DE CARGAS CCM 5 (2012)
CCM 5
MOTOR POTÊNCIA
FP Ø RPM TIPO DE PARTIDA
P (kW) S (KVA) Q (KVAR)
1 11,19 13,48 7,52 0,83 0,59 3530 PD
2 11,19 13,48 7,52 0,83 0,59 3530 PD
3 22,86 22,86 0 1 0
TO
4 11,19 13,48 7,52 0,83 0,59 3530 PD
5 30,48 30,48 0 1 0
TO
6 29,84 35,11 18,49 0,85 0,55
IV
7 149,2 173,49 88,53 0,86 0,54 3550 IV
8 149,2 173,49 88,53 0,86 0,54 3550 IV
9 3,73 4,6 2,7 0,81 0,63 3500 PD
10 14,92 17,98 10,03 0,83 0,59 3500 PD
11 2,24 2,8 1,68 0,8 0,64 3450 PD
12 2,24 2,8 1,68 0,8 0,64 3450 PD
13 9,33 11,37 6,51 0,82 0,61 3520 PD
14 3,81 3,81 0 1 0
TO
15 18,65 22,47 12,53 0,83 0,59 1760 SS
16 18,65 22,47 12,53 0,83 0,59 1760 SS
17 18,65 22,47 12,53 0,83 0,59 1760 SS
18 9,33 11,37 6,51 0,82 0,61 1760 PD
19 9,33 11,37 6,51 0,82 0,61 1770 PD
20 11,19 13,48 7,52 0,83 0,59 1755 PD
21 11,19 13,48 7,52 0,83 0,59 1755 PD
22 11,19 13,48 7,52 0,83 0,59 1755 PD
23 7,46 8,99 5,01 0,83 0,59 3530 PD
24 7,46 8,99 5,01 0,83 0,59 3530 PD
25 14,92 17,98 10,03 0,83 0,59 3535 IV
26 5,6 6,82 3,91 0,82 0,61 1740 PD
27 9,33 11,37 6,51 0,82 0,61 3520 PD
28 11,19 13,48 7,52 0,83 0,59 1755 PD
continua
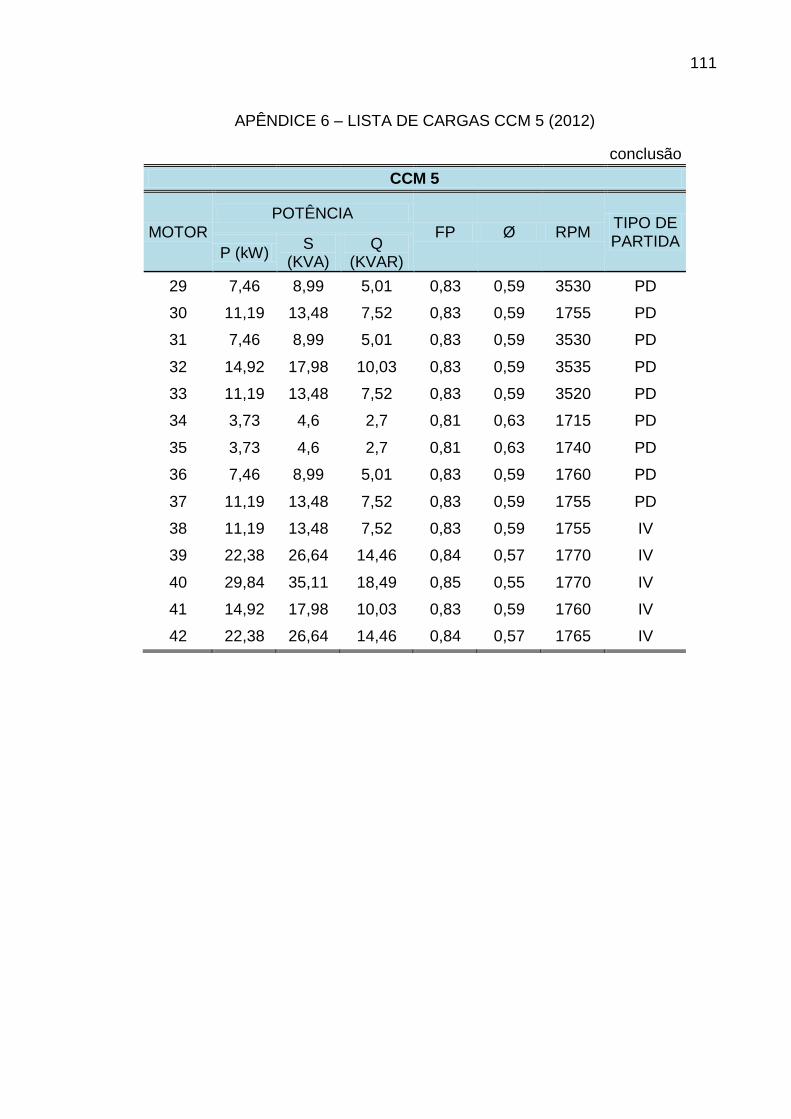
111
APÊNDICE 6 – LISTA DE CARGAS CCM 5 (2012)
conclusão
CCM 5
MOTOR
POTÊNCIA
FP Ø RPM TIPO DE PARTIDA
P (kW) S
(KVA) Q
(KVAR)
29 7,46 8,99 5,01 0,83 0,59 3530 PD
30 11,19 13,48 7,52 0,83 0,59 1755 PD
31 7,46 8,99 5,01 0,83 0,59 3530 PD
32 14,92 17,98 10,03 0,83 0,59 3535 PD
33 11,19 13,48 7,52 0,83 0,59 3520 PD
34 3,73 4,6 2,7 0,81 0,63 1715 PD
35 3,73 4,6 2,7 0,81 0,63 1740 PD
36 7,46 8,99 5,01 0,83 0,59 1760 PD
37 11,19 13,48 7,52 0,83 0,59 1755 PD
38 11,19 13,48 7,52 0,83 0,59 1755 IV
39 22,38 26,64 14,46 0,84 0,57 1770 IV
40 29,84 35,11 18,49 0,85 0,55 1770 IV
41 14,92 17,98 10,03 0,83 0,59 1760 IV
42 22,38 26,64 14,46 0,84 0,57 1765 IV
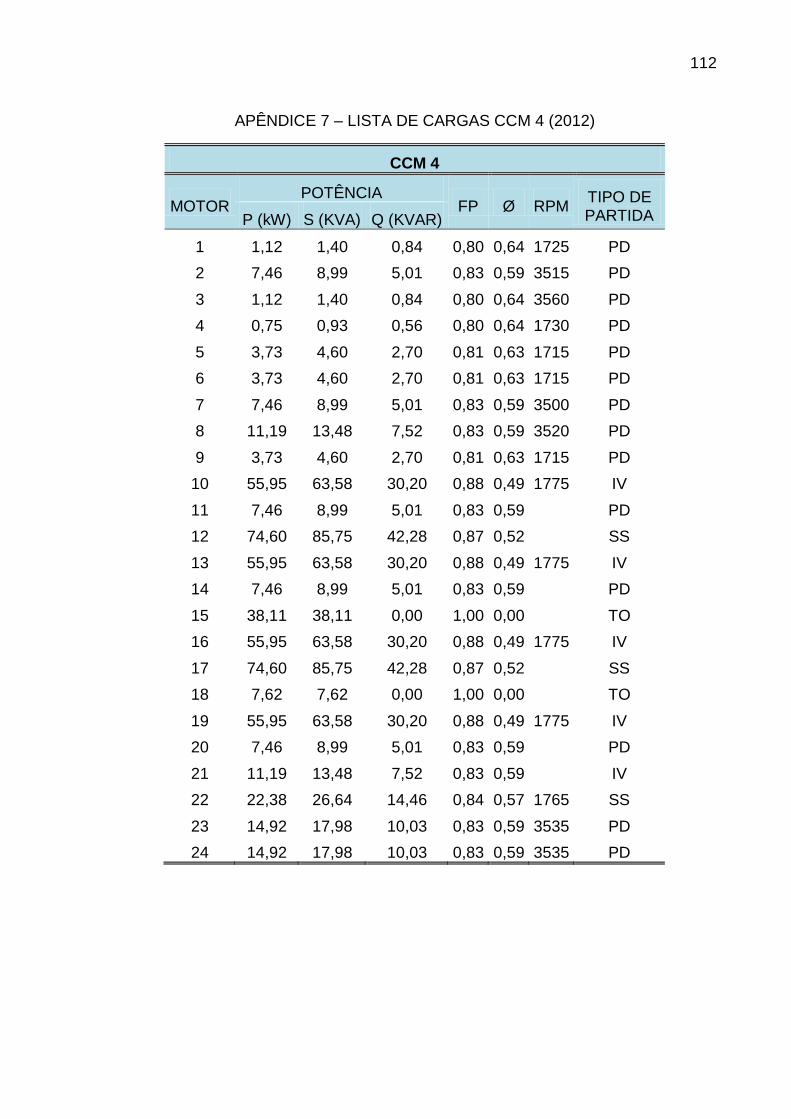
112
APÊNDICE 7 – LISTA DE CARGAS CCM 4 (2012)
CCM 4
MOTOR POTÊNCIA
FP Ø RPM TIPO DE PARTIDA P (kW) S (KVA) Q (KVAR)
1 1,12 1,40 0,84 0,80 0,64 1725 PD
2 7,46 8,99 5,01 0,83 0,59 3515 PD
3 1,12 1,40 0,84 0,80 0,64 3560 PD
4 0,75 0,93 0,56 0,80 0,64 1730 PD
5 3,73 4,60 2,70 0,81 0,63 1715 PD
6 3,73 4,60 2,70 0,81 0,63 1715 PD
7 7,46 8,99 5,01 0,83 0,59 3500 PD
8 11,19 13,48 7,52 0,83 0,59 3520 PD
9 3,73 4,60 2,70 0,81 0,63 1715 PD
10 55,95 63,58 30,20 0,88 0,49 1775 IV
11 7,46 8,99 5,01 0,83 0,59 PD
12 74,60 85,75 42,28 0,87 0,52 SS
13 55,95 63,58 30,20 0,88 0,49 1775 IV
14 7,46 8,99 5,01 0,83 0,59 PD
15 38,11 38,11 0,00 1,00 0,00 TO
16 55,95 63,58 30,20 0,88 0,49 1775 IV
17 74,60 85,75 42,28 0,87 0,52 SS
18 7,62 7,62 0,00 1,00 0,00 TO
19 55,95 63,58 30,20 0,88 0,49 1775 IV
20 7,46 8,99 5,01 0,83 0,59 PD
21 11,19 13,48 7,52 0,83 0,59 IV
22 22,38 26,64 14,46 0,84 0,57 1765 SS
23 14,92 17,98 10,03 0,83 0,59 3535 PD
24 14,92 17,98 10,03 0,83 0,59 3535 PD
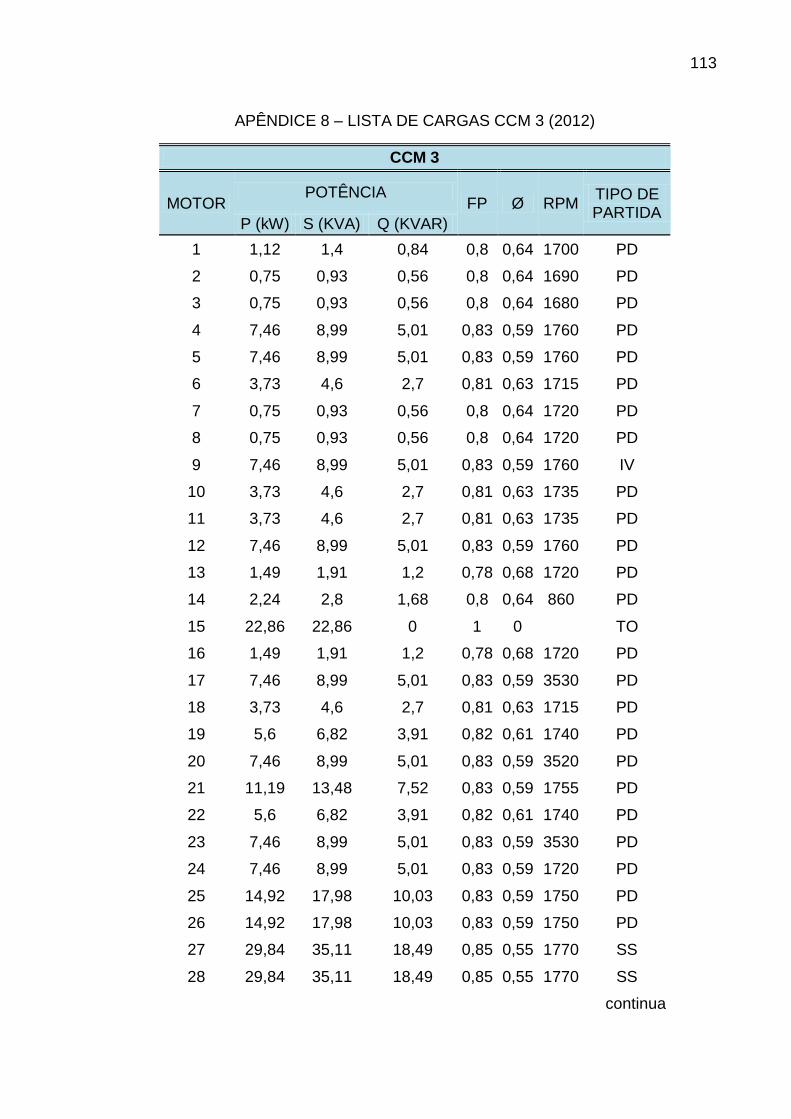
113
APÊNDICE 8 – LISTA DE CARGAS CCM 3 (2012)
CCM 3
MOTOR POTÊNCIA
FP Ø RPM TIPO DE PARTIDA
P (kW) S (KVA) Q (KVAR)
1 1,12 1,4 0,84 0,8 0,64 1700 PD
2 0,75 0,93 0,56 0,8 0,64 1690 PD
3 0,75 0,93 0,56 0,8 0,64 1680 PD
4 7,46 8,99 5,01 0,83 0,59 1760 PD
5 7,46 8,99 5,01 0,83 0,59 1760 PD
6 3,73 4,6 2,7 0,81 0,63 1715 PD
7 0,75 0,93 0,56 0,8 0,64 1720 PD
8 0,75 0,93 0,56 0,8 0,64 1720 PD
9 7,46 8,99 5,01 0,83 0,59 1760 IV
10 3,73 4,6 2,7 0,81 0,63 1735 PD
11 3,73 4,6 2,7 0,81 0,63 1735 PD
12 7,46 8,99 5,01 0,83 0,59 1760 PD
13 1,49 1,91 1,2 0,78 0,68 1720 PD
14 2,24 2,8 1,68 0,8 0,64 860 PD
15 22,86 22,86 0 1 0
TO
16 1,49 1,91 1,2 0,78 0,68 1720 PD
17 7,46 8,99 5,01 0,83 0,59 3530 PD
18 3,73 4,6 2,7 0,81 0,63 1715 PD
19 5,6 6,82 3,91 0,82 0,61 1740 PD
20 7,46 8,99 5,01 0,83 0,59 3520 PD
21 11,19 13,48 7,52 0,83 0,59 1755 PD
22 5,6 6,82 3,91 0,82 0,61 1740 PD
23 7,46 8,99 5,01 0,83 0,59 3530 PD
24 7,46 8,99 5,01 0,83 0,59 1720 PD
25 14,92 17,98 10,03 0,83 0,59 1750 PD
26 14,92 17,98 10,03 0,83 0,59 1750 PD
27 29,84 35,11 18,49 0,85 0,55 1770 SS
28 29,84 35,11 18,49 0,85 0,55 1770 SS
continua
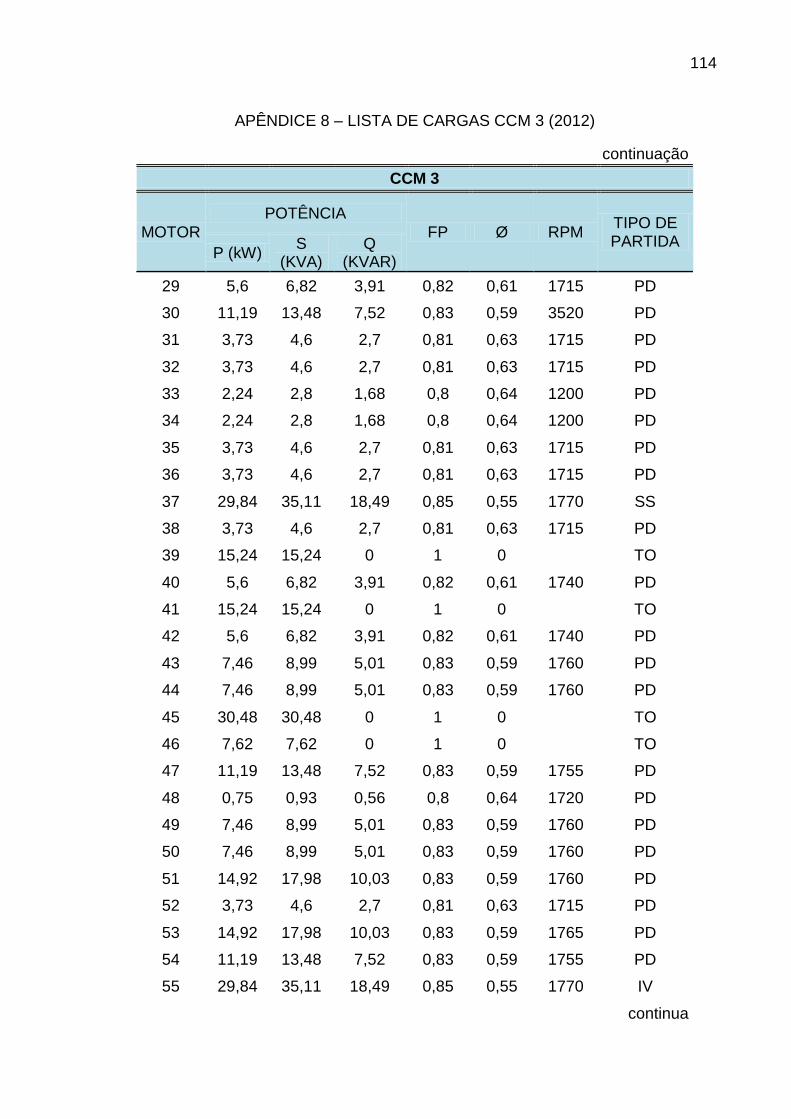
114
APÊNDICE 8 – LISTA DE CARGAS CCM 3 (2012)
continuação
CCM 3
MOTOR
POTÊNCIA
FP Ø RPM TIPO DE PARTIDA
P (kW) S
(KVA) Q
(KVAR)
29 5,6 6,82 3,91 0,82 0,61 1715 PD
30 11,19 13,48 7,52 0,83 0,59 3520 PD
31 3,73 4,6 2,7 0,81 0,63 1715 PD
32 3,73 4,6 2,7 0,81 0,63 1715 PD
33 2,24 2,8 1,68 0,8 0,64 1200 PD
34 2,24 2,8 1,68 0,8 0,64 1200 PD
35 3,73 4,6 2,7 0,81 0,63 1715 PD
36 3,73 4,6 2,7 0,81 0,63 1715 PD
37 29,84 35,11 18,49 0,85 0,55 1770 SS
38 3,73 4,6 2,7 0,81 0,63 1715 PD
39 15,24 15,24 0 1 0
TO
40 5,6 6,82 3,91 0,82 0,61 1740 PD
41 15,24 15,24 0 1 0
TO
42 5,6 6,82 3,91 0,82 0,61 1740 PD
43 7,46 8,99 5,01 0,83 0,59 1760 PD
44 7,46 8,99 5,01 0,83 0,59 1760 PD
45 30,48 30,48 0 1 0
TO
46 7,62 7,62 0 1 0
TO
47 11,19 13,48 7,52 0,83 0,59 1755 PD
48 0,75 0,93 0,56 0,8 0,64 1720 PD
49 7,46 8,99 5,01 0,83 0,59 1760 PD
50 7,46 8,99 5,01 0,83 0,59 1760 PD
51 14,92 17,98 10,03 0,83 0,59 1760 PD
52 3,73 4,6 2,7 0,81 0,63 1715 PD
53 14,92 17,98 10,03 0,83 0,59 1765 PD
54 11,19 13,48 7,52 0,83 0,59 1755 PD
55 29,84 35,11 18,49 0,85 0,55 1770 IV
continua
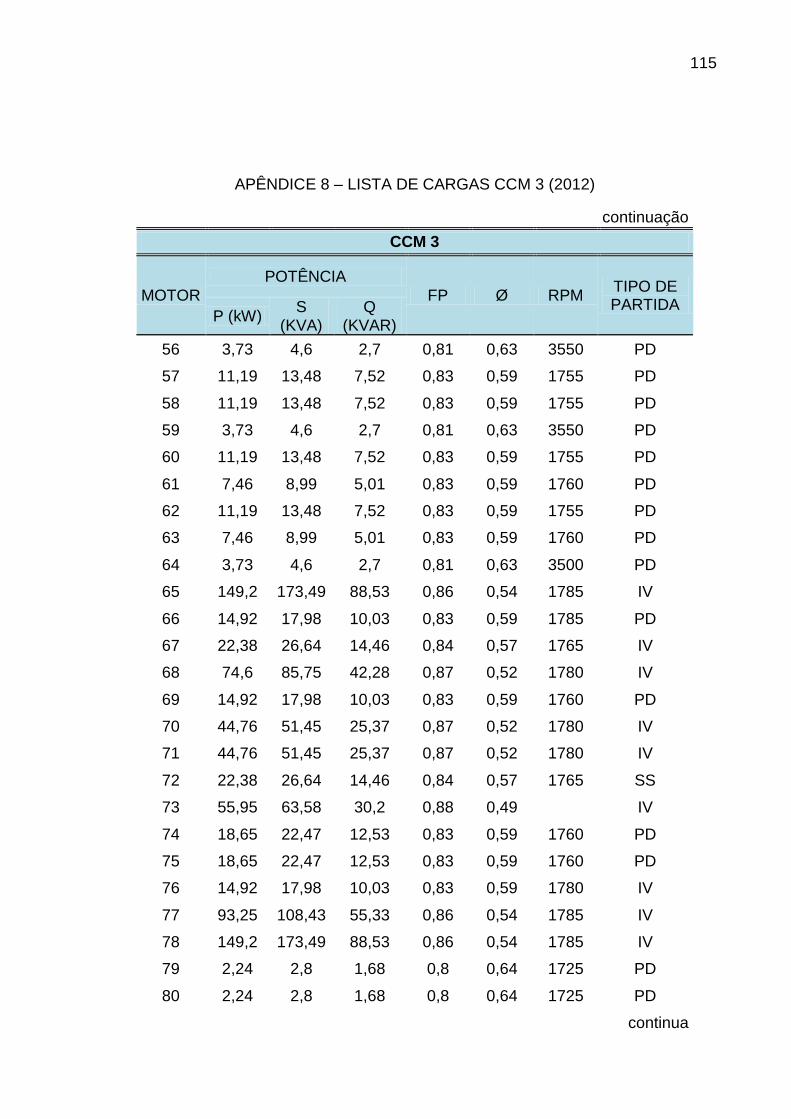
115
APÊNDICE 8 – LISTA DE CARGAS CCM 3 (2012)
continuação
CCM 3
MOTOR
POTÊNCIA
FP Ø RPM TIPO DE PARTIDA
P (kW) S
(KVA) Q
(KVAR)
56 3,73 4,6 2,7 0,81 0,63 3550 PD
57 11,19 13,48 7,52 0,83 0,59 1755 PD
58 11,19 13,48 7,52 0,83 0,59 1755 PD
59 3,73 4,6 2,7 0,81 0,63 3550 PD
60 11,19 13,48 7,52 0,83 0,59 1755 PD
61 7,46 8,99 5,01 0,83 0,59 1760 PD
62 11,19 13,48 7,52 0,83 0,59 1755 PD
63 7,46 8,99 5,01 0,83 0,59 1760 PD
64 3,73 4,6 2,7 0,81 0,63 3500 PD
65 149,2 173,49 88,53 0,86 0,54 1785 IV
66 14,92 17,98 10,03 0,83 0,59 1785 PD
67 22,38 26,64 14,46 0,84 0,57 1765 IV
68 74,6 85,75 42,28 0,87 0,52 1780 IV
69 14,92 17,98 10,03 0,83 0,59 1760 PD
70 44,76 51,45 25,37 0,87 0,52 1780 IV
71 44,76 51,45 25,37 0,87 0,52 1780 IV
72 22,38 26,64 14,46 0,84 0,57 1765 SS
73 55,95 63,58 30,2 0,88 0,49
IV
74 18,65 22,47 12,53 0,83 0,59 1760 PD
75 18,65 22,47 12,53 0,83 0,59 1760 PD
76 14,92 17,98 10,03 0,83 0,59 1780 IV
77 93,25 108,43 55,33 0,86 0,54 1785 IV
78 149,2 173,49 88,53 0,86 0,54 1785 IV
79 2,24 2,8 1,68 0,8 0,64 1725 PD
80 2,24 2,8 1,68 0,8 0,64 1725 PD
continua
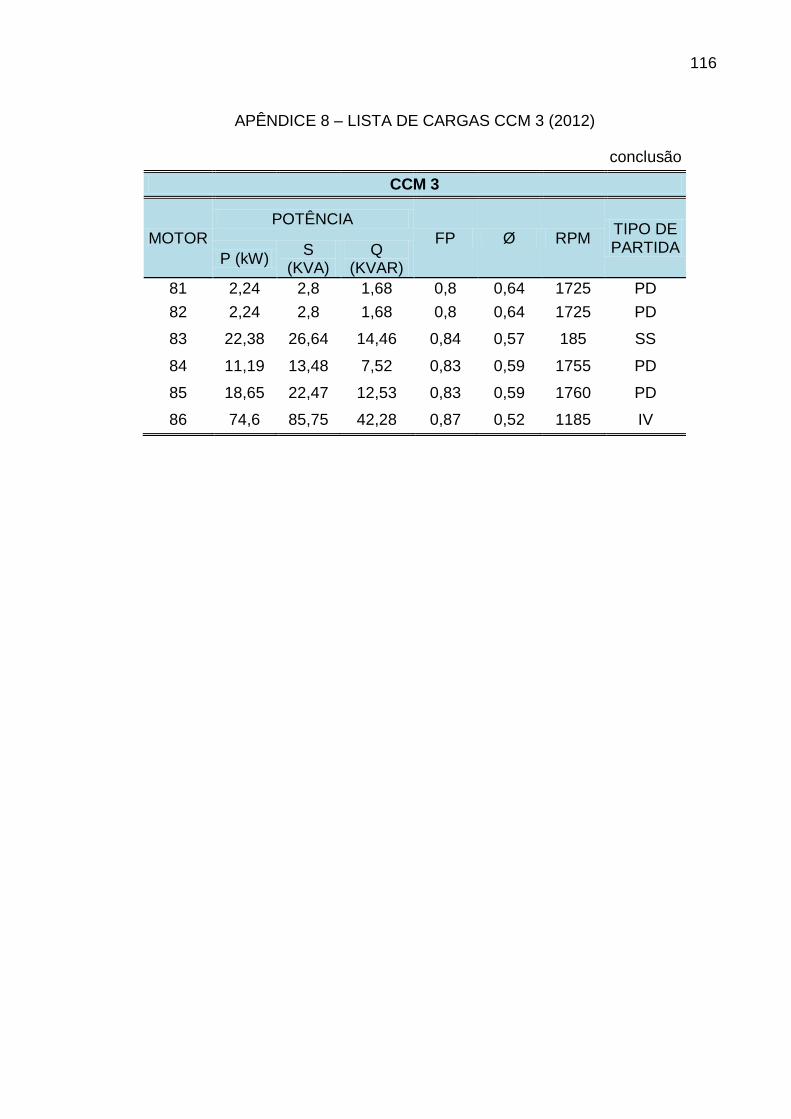
116
APÊNDICE 8 – LISTA DE CARGAS CCM 3 (2012)
conclusão
CCM 3
MOTOR
POTÊNCIA
FP Ø RPM TIPO DE PARTIDA
P (kW) S
(KVA) Q
(KVAR)
81 2,24 2,8 1,68 0,8 0,64 1725 PD
82 2,24 2,8 1,68 0,8 0,64 1725 PD
83 22,38 26,64 14,46 0,84 0,57 185 SS
84 11,19 13,48 7,52 0,83 0,59 1755 PD
85 18,65 22,47 12,53 0,83 0,59 1760 PD
86 74,6 85,75 42,28 0,87 0,52 1185 IV
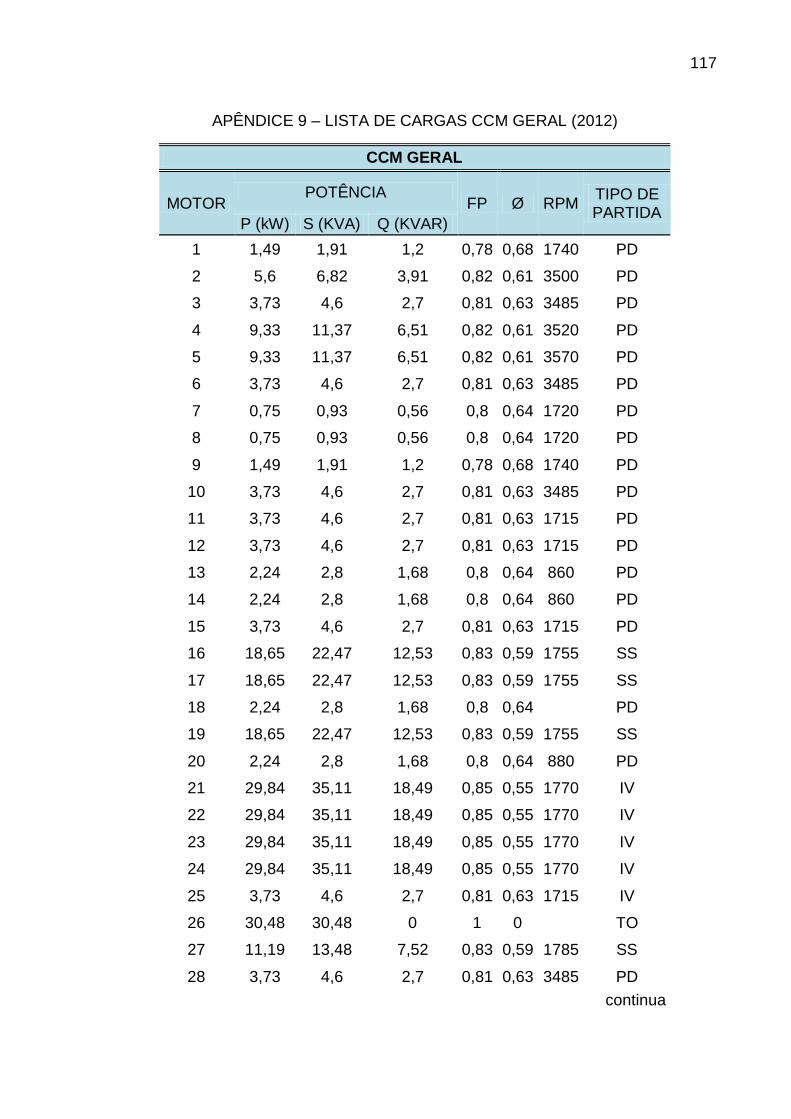
117
APÊNDICE 9 – LISTA DE CARGAS CCM GERAL (2012)
CCM GERAL
MOTOR POTÊNCIA
FP Ø RPM TIPO DE PARTIDA
P (kW) S (KVA) Q (KVAR)
1 1,49 1,91 1,2 0,78 0,68 1740 PD
2 5,6 6,82 3,91 0,82 0,61 3500 PD
3 3,73 4,6 2,7 0,81 0,63 3485 PD
4 9,33 11,37 6,51 0,82 0,61 3520 PD
5 9,33 11,37 6,51 0,82 0,61 3570 PD
6 3,73 4,6 2,7 0,81 0,63 3485 PD
7 0,75 0,93 0,56 0,8 0,64 1720 PD
8 0,75 0,93 0,56 0,8 0,64 1720 PD
9 1,49 1,91 1,2 0,78 0,68 1740 PD
10 3,73 4,6 2,7 0,81 0,63 3485 PD
11 3,73 4,6 2,7 0,81 0,63 1715 PD
12 3,73 4,6 2,7 0,81 0,63 1715 PD
13 2,24 2,8 1,68 0,8 0,64 860 PD
14 2,24 2,8 1,68 0,8 0,64 860 PD
15 3,73 4,6 2,7 0,81 0,63 1715 PD
16 18,65 22,47 12,53 0,83 0,59 1755 SS
17 18,65 22,47 12,53 0,83 0,59 1755 SS
18 2,24 2,8 1,68 0,8 0,64
PD
19 18,65 22,47 12,53 0,83 0,59 1755 SS
20 2,24 2,8 1,68 0,8 0,64 880 PD
21 29,84 35,11 18,49 0,85 0,55 1770 IV
22 29,84 35,11 18,49 0,85 0,55 1770 IV
23 29,84 35,11 18,49 0,85 0,55 1770 IV
24 29,84 35,11 18,49 0,85 0,55 1770 IV
25 3,73 4,6 2,7 0,81 0,63 1715 IV
26 30,48 30,48 0 1 0
TO
27 11,19 13,48 7,52 0,83 0,59 1785 SS
28 3,73 4,6 2,7 0,81 0,63 3485 PD
continua
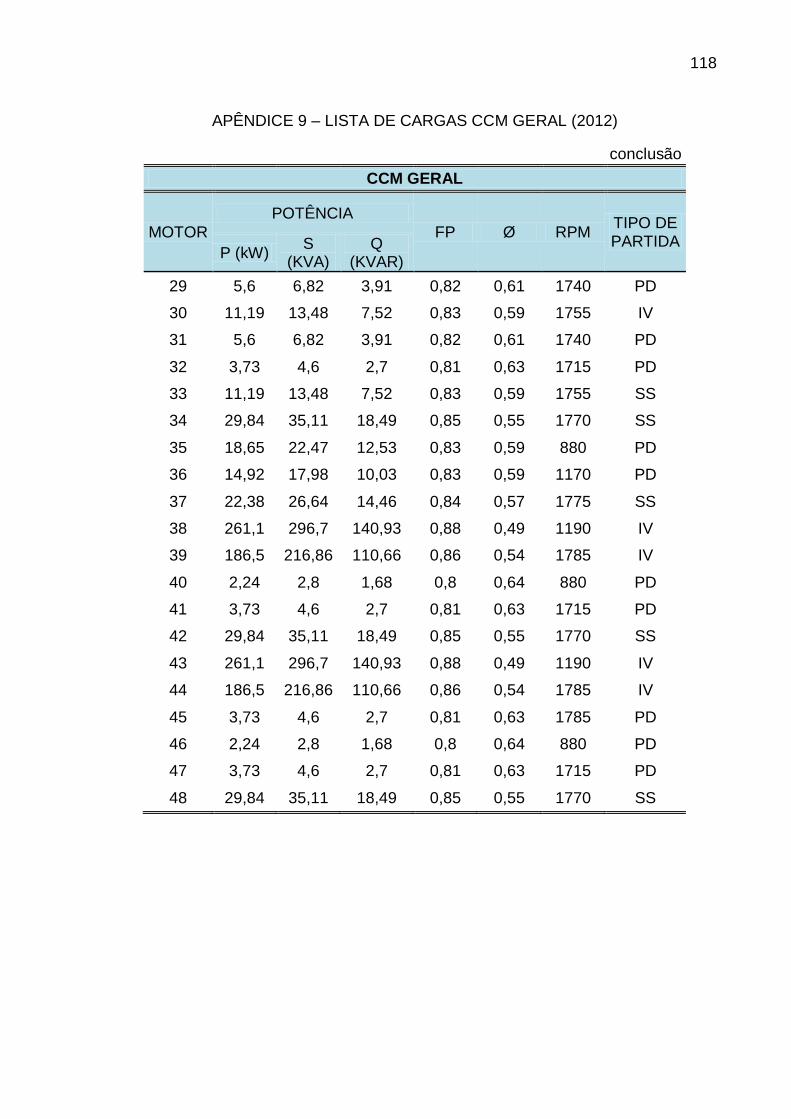
118
APÊNDICE 9 – LISTA DE CARGAS CCM GERAL (2012)
conclusão
CCM GERAL
MOTOR
POTÊNCIA
FP Ø RPM TIPO DE PARTIDA
P (kW) S
(KVA) Q
(KVAR)
29 5,6 6,82 3,91 0,82 0,61 1740 PD
30 11,19 13,48 7,52 0,83 0,59 1755 IV
31 5,6 6,82 3,91 0,82 0,61 1740 PD
32 3,73 4,6 2,7 0,81 0,63 1715 PD
33 11,19 13,48 7,52 0,83 0,59 1755 SS
34 29,84 35,11 18,49 0,85 0,55 1770 SS
35 18,65 22,47 12,53 0,83 0,59 880 PD
36 14,92 17,98 10,03 0,83 0,59 1170 PD
37 22,38 26,64 14,46 0,84 0,57 1775 SS
38 261,1 296,7 140,93 0,88 0,49 1190 IV
39 186,5 216,86 110,66 0,86 0,54 1785 IV
40 2,24 2,8 1,68 0,8 0,64 880 PD
41 3,73 4,6 2,7 0,81 0,63 1715 PD
42 29,84 35,11 18,49 0,85 0,55 1770 SS
43 261,1 296,7 140,93 0,88 0,49 1190 IV
44 186,5 216,86 110,66 0,86 0,54 1785 IV
45 3,73 4,6 2,7 0,81 0,63 1785 PD
46 2,24 2,8 1,68 0,8 0,64 880 PD
47 3,73 4,6 2,7 0,81 0,63 1715 PD
48 29,84 35,11 18,49 0,85 0,55 1770 SS
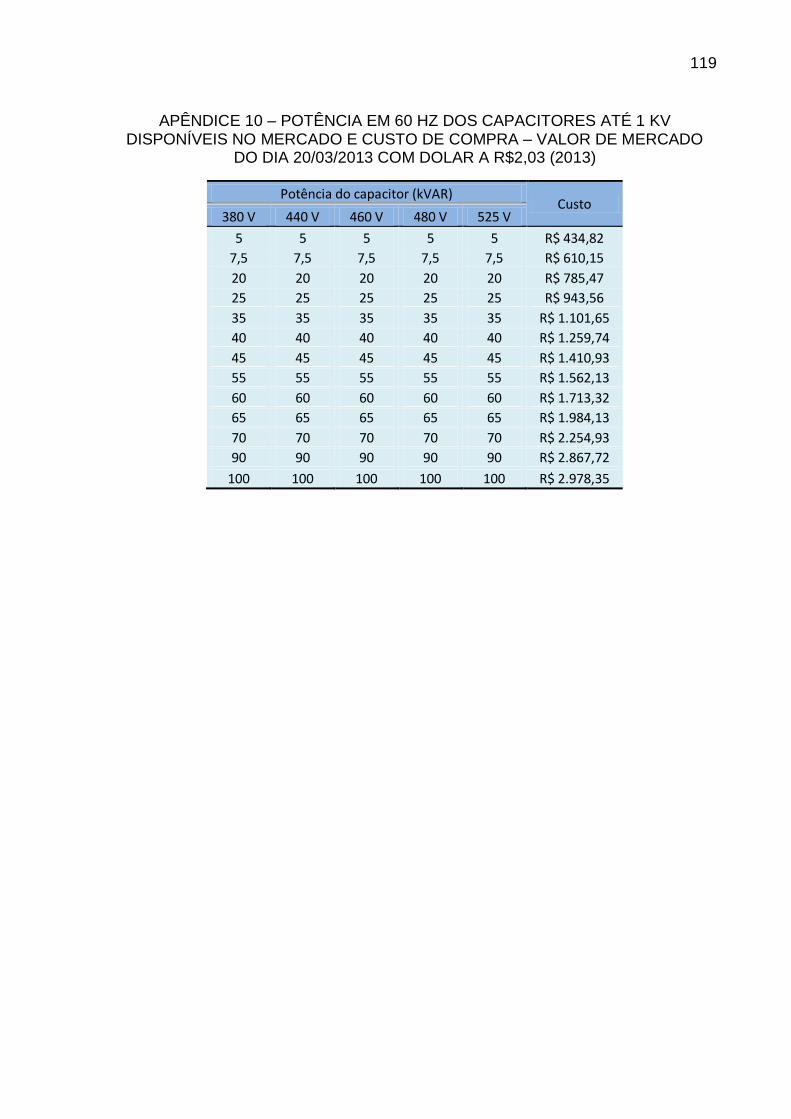
119
APÊNDICE 10 – POTÊNCIA EM 60 HZ DOS CAPACITORES ATÉ 1 KV DISPONÍVEIS NO MERCADO E CUSTO DE COMPRA – VALOR DE MERCADO
DO DIA 20/03/2013 COM DOLAR A R$2,03 (2013)
Potência do capacitor (kVAR) Custo
380 V 440 V 460 V 480 V 525 V
5 5 5 5 5 R$ 434,82 7,5 7,5 7,5 7,5 7,5 R$ 610,15
20 20 20 20 20 R$ 785,47 25 25 25 25 25 R$ 943,56
35 35 35 35 35 R$ 1.101,65 40 40 40 40 40 R$ 1.259,74
45 45 45 45 45 R$ 1.410,93 55 55 55 55 55 R$ 1.562,13
60 60 60 60 60 R$ 1.713,32 65 65 65 65 65 R$ 1.984,13
70 70 70 70 70 R$ 2.254,93 90 90 90 90 90 R$ 2.867,72
100 100 100 100 100 R$ 2.978,35
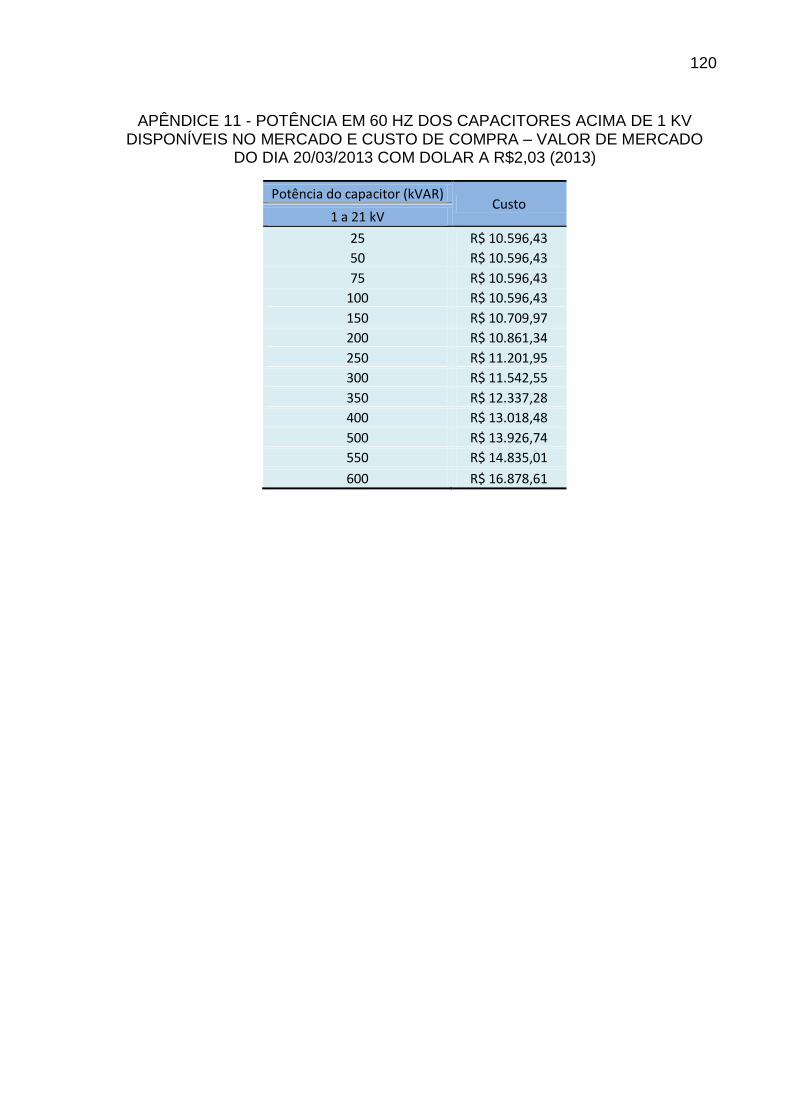
120
APÊNDICE 11 - POTÊNCIA EM 60 HZ DOS CAPACITORES ACIMA DE 1 KV DISPONÍVEIS NO MERCADO E CUSTO DE COMPRA – VALOR DE MERCADO
DO DIA 20/03/2013 COM DOLAR A R$2,03 (2013)
Potência do capacitor (kVAR) Custo
1 a 21 kV
25 R$ 10.596,43 50 R$ 10.596,43
75 R$ 10.596,43 100 R$ 10.596,43
150 R$ 10.709,97 200 R$ 10.861,34
250 R$ 11.201,95 300 R$ 11.542,55
350 R$ 12.337,28 400 R$ 13.018,48
500 R$ 13.926,74 550 R$ 14.835,01
600 R$ 16.878,61
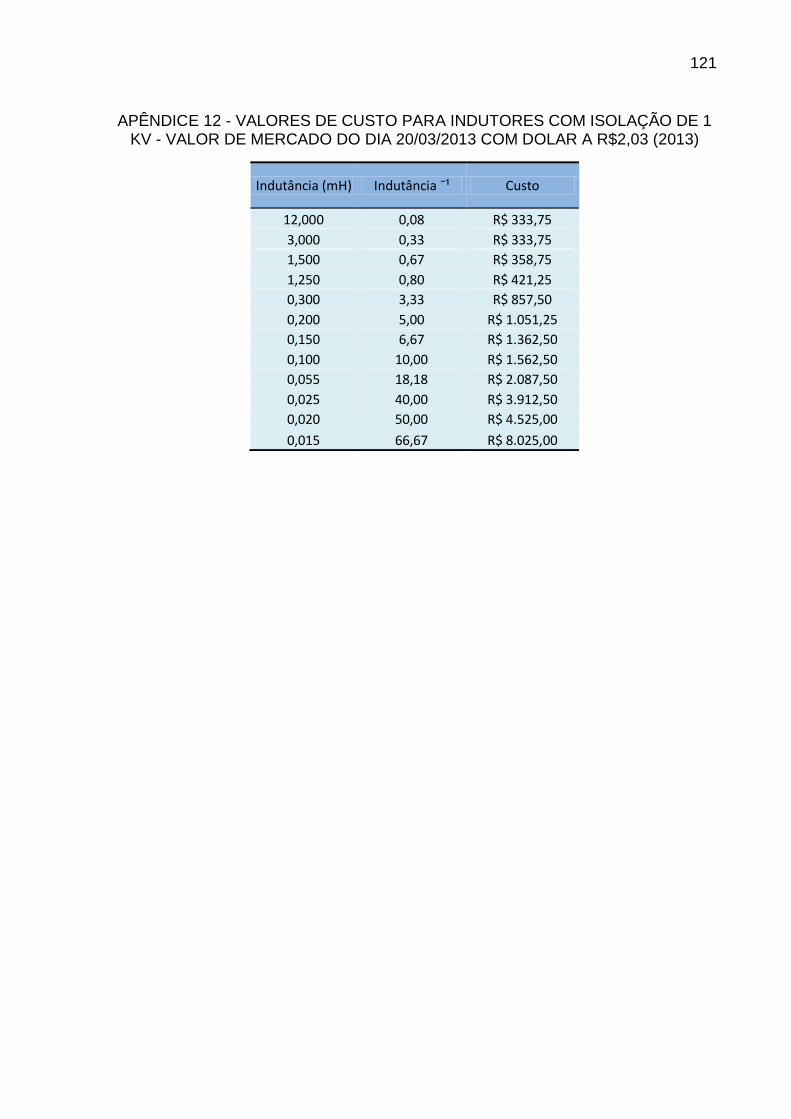
121
APÊNDICE 12 - VALORES DE CUSTO PARA INDUTORES COM ISOLAÇÃO DE 1 KV - VALOR DE MERCADO DO DIA 20/03/2013 COM DOLAR A R$2,03 (2013)
Indutância (mH) Indutância ¯¹ Custo
12,000 0,08 R$ 333,75
3,000 0,33 R$ 333,75 1,500 0,67 R$ 358,75
1,250 0,80 R$ 421,25 0,300 3,33 R$ 857,50
0,200 5,00 R$ 1.051,25 0,150 6,67 R$ 1.362,50
0,100 10,00 R$ 1.562,50 0,055 18,18 R$ 2.087,50
0,025 40,00 R$ 3.912,50 0,020 50,00 R$ 4.525,00
0,015 66,67 R$ 8.025,00
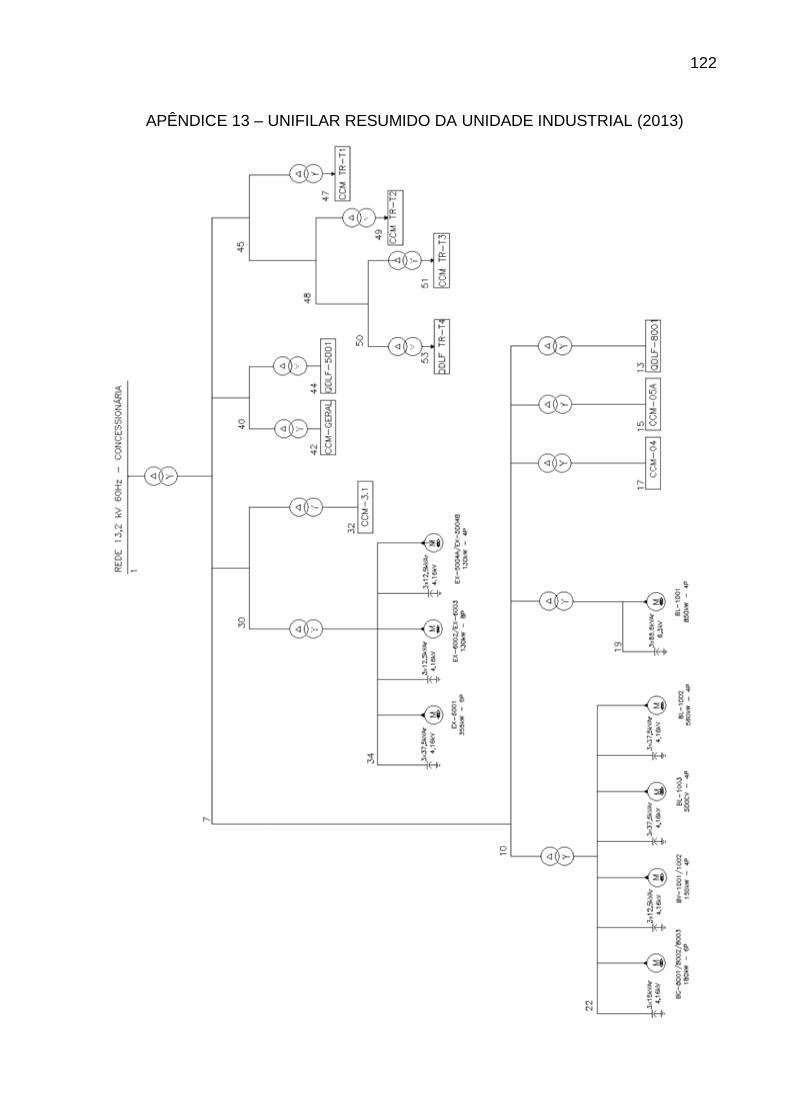
122
APÊNDICE 13 – UNIFILAR RESUMIDO DA UNIDADE INDUSTRIAL (2013)
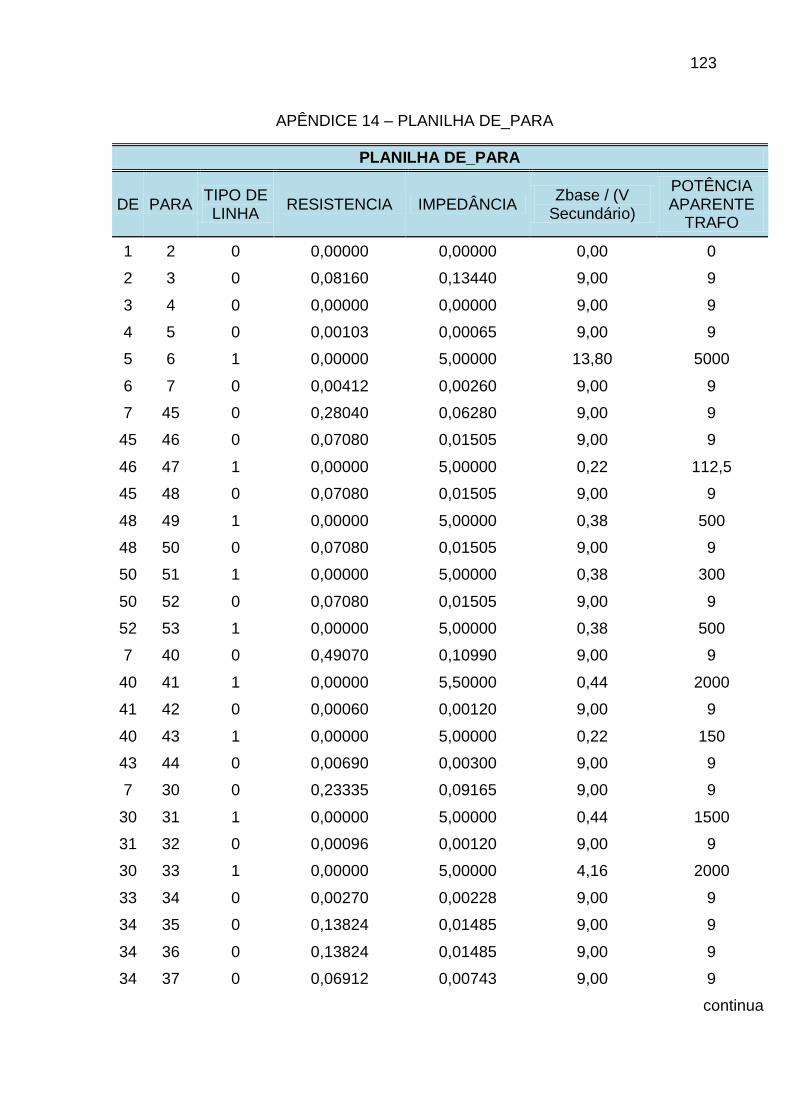
123
APÊNDICE 14 – PLANILHA DE_PARA
PLANILHA DE_PARA
DE PARA TIPO DE LINHA
RESISTENCIA IMPEDÂNCIA Zbase / (V
Secundário)
POTÊNCIA APARENTE
TRAFO
1 2 0 0,00000 0,00000 0,00 0
2 3 0 0,08160 0,13440 9,00 9
3 4 0 0,00000 0,00000 9,00 9
4 5 0 0,00103 0,00065 9,00 9
5 6 1 0,00000 5,00000 13,80 5000
6 7 0 0,00412 0,00260 9,00 9
7 45 0 0,28040 0,06280 9,00 9
45 46 0 0,07080 0,01505 9,00 9
46 47 1 0,00000 5,00000 0,22 112,5
45 48 0 0,07080 0,01505 9,00 9
48 49 1 0,00000 5,00000 0,38 500
48 50 0 0,07080 0,01505 9,00 9
50 51 1 0,00000 5,00000 0,38 300
50 52 0 0,07080 0,01505 9,00 9
52 53 1 0,00000 5,00000 0,38 500
7 40 0 0,49070 0,10990 9,00 9
40 41 1 0,00000 5,50000 0,44 2000
41 42 0 0,00060 0,00120 9,00 9
40 43 1 0,00000 5,00000 0,22 150
43 44 0 0,00690 0,00300 9,00 9
7 30 0 0,23335 0,09165 9,00 9
30 31 1 0,00000 5,00000 0,44 1500
31 32 0 0,00096 0,00120 9,00 9
30 33 1 0,00000 5,00000 4,16 2000
33 34 0 0,00270 0,00228 9,00 9
34 35 0 0,13824 0,01485 9,00 9
34 36 0 0,13824 0,01485 9,00 9
34 37 0 0,06912 0,00743 9,00 9
continua
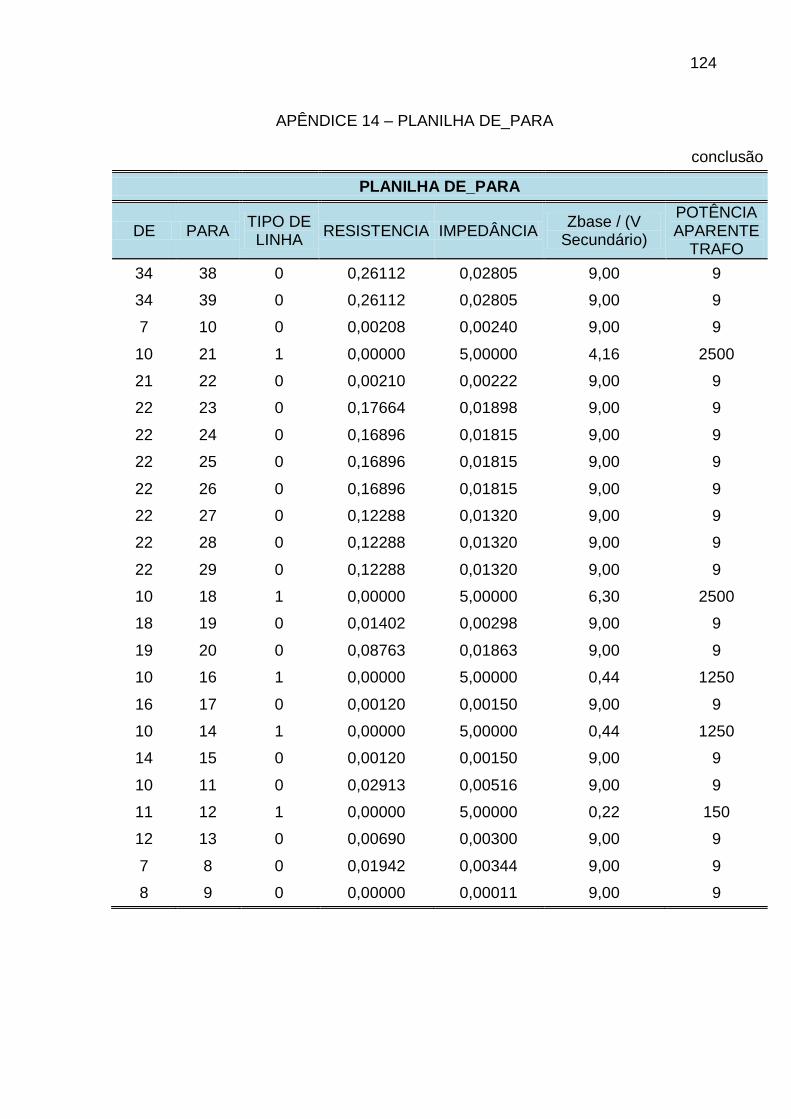
124
APÊNDICE 14 – PLANILHA DE_PARA
conclusão
PLANILHA DE_PARA
DE PARA TIPO DE LINHA
RESISTENCIA IMPEDÂNCIA Zbase / (V
Secundário)
POTÊNCIA APARENTE
TRAFO
34 38 0 0,26112 0,02805 9,00 9
34 39 0 0,26112 0,02805 9,00 9
7 10 0 0,00208 0,00240 9,00 9
10 21 1 0,00000 5,00000 4,16 2500
21 22 0 0,00210 0,00222 9,00 9
22 23 0 0,17664 0,01898 9,00 9
22 24 0 0,16896 0,01815 9,00 9
22 25 0 0,16896 0,01815 9,00 9
22 26 0 0,16896 0,01815 9,00 9
22 27 0 0,12288 0,01320 9,00 9
22 28 0 0,12288 0,01320 9,00 9
22 29 0 0,12288 0,01320 9,00 9
10 18 1 0,00000 5,00000 6,30 2500
18 19 0 0,01402 0,00298 9,00 9
19 20 0 0,08763 0,01863 9,00 9
10 16 1 0,00000 5,00000 0,44 1250
16 17 0 0,00120 0,00150 9,00 9
10 14 1 0,00000 5,00000 0,44 1250
14 15 0 0,00120 0,00150 9,00 9
10 11 0 0,02913 0,00516 9,00 9
11 12 1 0,00000 5,00000 0,22 150
12 13 0 0,00690 0,00300 9,00 9
7 8 0 0,01942 0,00344 9,00 9
8 9 0 0,00000 0,00011 9,00 9