intelligent agents katia sycara [email protected] the robotics institute joseph giampapa...
Post on 22-Dec-2015
245 views
TRANSCRIPT
Intelligent Agents
Katia Sycara
The Robotics Institute
Joseph Giampapa
www.cs.cmu.edu/~softagents

What is an agent?• An agent is an autonomous computational
entity, which:– is reactive and proactive– is goal driven– is intelligent:
• able to reason, plan and sometimes learn
• has domain specific intelligence
– interacts with humans, other agents, and the environment via sensors and effectors in a high level language/protocol
– anticipates user needs and reacts based on them– wish list: friendly, understands natural lang.,etc

Multi-Agent Systems (MAS)
• An agent is more useful in the context of others:– can concentrate on tasks of its expertise– can delegate other tasks to other experts– can take advantage of its ability to intelligently
communicate, coordinate, negotiate
• But, a MAS is not just a collection of agents– it needs meaningful ways for agents to interact– it needs some system design and performance
evaluation
MAS - Two Approaches
• Build a system that is comprised of agents - should provide good performance
• Advantages may arise from:– possibility to develop each agent as an expert– incorporation of non-local expertise– rather simple to have multiple developers
working concurrently
• Example: a system within an organization
1. Centralized design
MAS - Two Approaches
• Usually, the system has no prior static design, only single agents within
• Agents seek others to provide services, without knowing in advance who they are
• There is a need for agent finding mechanism• Other agent may be non-cooperative or untrusted or
malicious• Example: markets, Internet
2. Open MAS

Design and Architecture - Outline
• Design philosophies
• Information processing and needs
• Reactive architectures
• Deliberative architectures
• Layered architectures
• Belief, Desire, Intention (BDI)
• Concurrent architecture (RETSINA)
Agent Design Philosophies• Agents reside in the environment: the world and
other agents
• The environment can be characterized by a set of states S={s1,s2,...}
• Agents execute actions A={a1,a2,…}
• An action is a function action: SS, that affects the environment via state change
• So, in general, an agent is a set of actions that receive input from the world and manipulate the state of the world
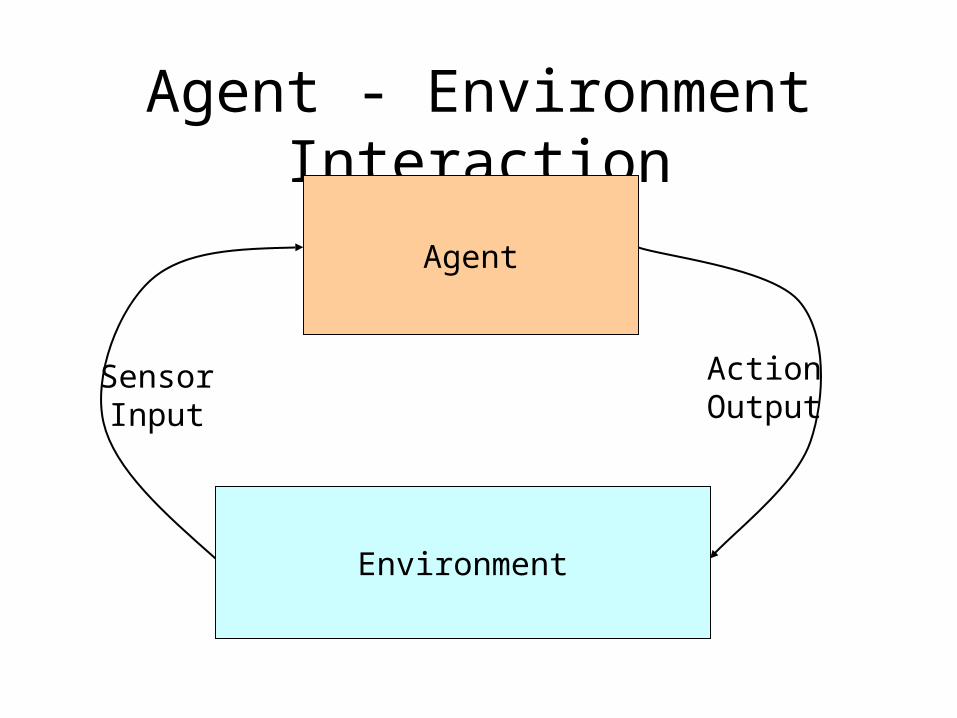
Agent - Environment Interaction
Agent
Environment
SensorInput
ActionOutput
Architecture Design • A map of the internal structures of the
agent, includes:– data structures– operation that can be performed on them– control and data flow between the structures
• Starts from a high-level definition and traverses through refinements
• Design decisions result in adding details, getting closer to code level, reducing generality
Information and Processing Needs• System architecture design needs knowledge of:
– what the expected inputs are?– what the required/expected outputs are?– what processing can provide this relation between
input and output?
• For agents, in particular:– what are the possible/expected states of the world?– how should the world state be perceived?– how should the agent’s reasoning be affected by the
world state?– how should agent reasoning result in agent action?
Agent Information Needs
• Is the “state of the world” sufficient?• Yes. Usually it is too much:
– some or most of it may be inaccessible– dynamic and possibly non-deterministic– includes other agents, users, internet, etc
• Perception filters and reduces amount of info.• Design question: what is the minimal set of data
and how to filter/extract it?
Agent Architectures
Reactive architecturesDeliberative architectures
• Layered architectures
• Belief, Desire, Intention (BDI)
• Concurrent architecture (RETSINA)

Agent Architectures (cont)
• Reactive vs. deliberative– Reactive agents: upon input from the environment,
they react with action execution – Deliberative agents: upon input, a reasoning
process is invoked. Action is based on the results of the reasoning
• Agents may populate the whole spectrum between purely reactive and maximally deliberative (rational)
Agent Processing Needs
• Reactive agents only need to map between world states and actions
• Deliberative agents need to reason for action. May include:– taking into account historical states of world – creating and maintaining an internal state– reasoning about world and states– planning, re-planning for current/future action– learning
Agent Processing Needs (continued)
• Collaborative (social) agents need, in addition:– maintain models of other agents and the society– reason about others– plan collaborative activity– reason about interaction: communication,
coordination, collaboration
Required Agent Attributes• Perception - a function perceive: SP, where
P={p1,p2,…} a set of percepts:– required for both reactive and deliberative agents
– may be provided via sensor or any other input
• Internal state I (records history)– not necessary for reactive agents
– deliberative agents need to maintain information regarding past activity to allow for deliberation
• Reasoning: performed mainly by deliberative agents, but may be useful for reactive, too
• Learning: only in deliberative agents
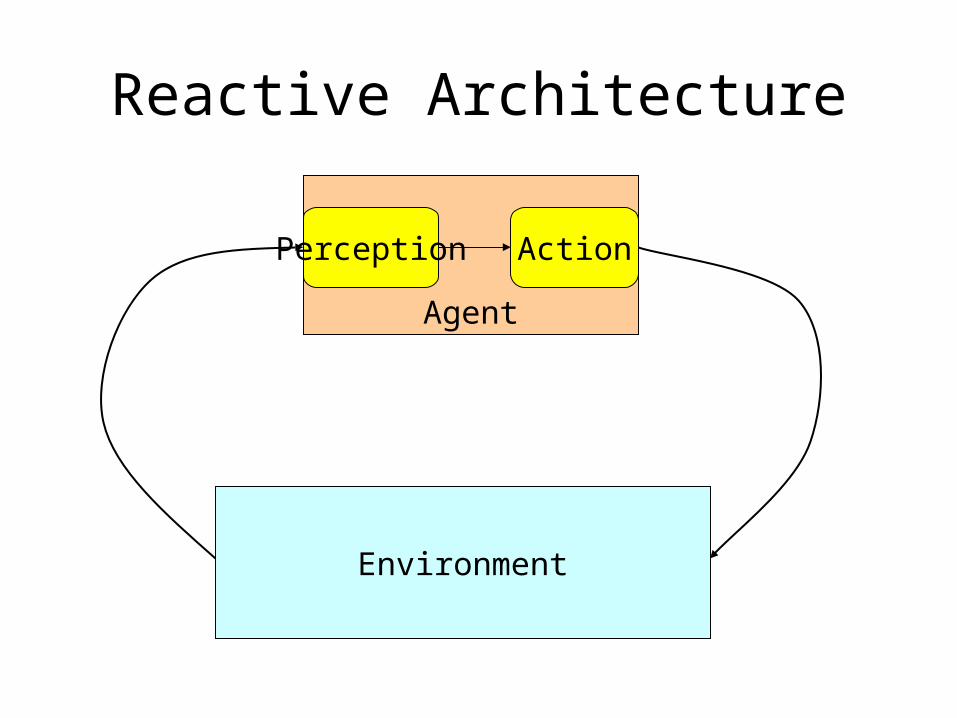
Reactive Architecture
Agent
Environment
Perception Action
Agents without State (Reactive)
• Perception is a function perceive: SP
• Action is a function action: SS,
• Action selection is a function as: PA
• The world state results in a percept via perception, the percept results in an action selection, and the action transforms the state of the world
Example: Subsumption (Brooks) • An agent decision making is performed by a set of task
accomplishing behaviors (TAB)• In Brooks’ implementation, each TAB is a finite state
machine• In other implementation, TABs are rules of the type
situation action, which maps percepts to actions• In the subsumption architecture, multiple behaviors can
be activated simultaneously• Action selection is based on a subsumption hierarchy,
behaviors arranged in layers, which are at different layers of abstraction (layered architecture)
Reactive: Pros and Cons• Pros:
– simplicity, economy– computational tractability– fault tolerance– overall behavior emerges from component interaction
• Cons:– without a model of the environment, agents need
sufficient info. to determine action– agents are “short-sighted”, may limit decision quality– relationship between components not clear.

Agents with State = DeliberativeAgent
Environment
Perception Action
Reasoning State
Agents with State (Deliberative)
• Perception is still a function perceive: S P
• Action is still action: SS
• But action selection (was as: PA), is now the function as: IA
• In addition, update: P×II is a function that update the internal state based on percepts (may include complex reasoning)

Agents with State: RefinementAgent
Environment
Perception Action
Reasoning
Stateplanning learning
inference

Layered Agent Architectures• Usually, but not always, deliberative
architectures
• Decision making is performed via separation to several software layers
• Each layer reasons at a different level of abstraction. Layers interact
• Two major types:– vertical layers: perception input and action
output are dealt with by a single layer each– horizontal layers: each layer directly connects
to perception input and action output

Layers’ design• Typically, at least two layers, one for
reactive behavior and one for proactive
• No reason not to have multiple layers
• Typology: information and control flow between the layers, e.g.:
Perception Action
Agent

Information and Control Flow
Layer n
Layer 2
Layer 1
Layer n
Layer 2
Layer 1
Layer n
Layer 2
Layer 1
Perceptualinput
Perceptualinput
Perceptualinput
Actionoutput
Actionoutput
Actionoutput
Horizontal Vertical (one pass) Vertical (two pass)
Layers Pros and Cons• Horizontal
– each layer acts like an agent - provides independency, simplicity
– for n different behaviors we implement n layers– competition between layers can cause incoherence– need for mediation between layers: exponentially
complex, a control bottleneck
• Vertical– Low complexity, no control bottleneck– Less flexible and not fault tolerant: one decision
needs all layers
TOURINGMACHINES
• Three layers produce suggestions for action:– reactive: implements situation-action rules as in
Brooks’ subsumption architecture– planning: achieves proactiveness via plans based
on a library of schemas– modeling: model of world, other agents, self,
predicts conflicts, generates goals to resolve them
• Domain of implementation: multiple vehicles

Example: TOURINGMACHINES
Modeling layer
Planning layer
Reactive layer
Control subsystem
Perception subsystem Action subsystem
Perceptioninput
Actionoutput
INTERRAP
• A vertically layered two pass architecture• Layers have similar purposes as in
TOURINGMACHINES
• Each layer is associated with a knowledge-base
• Layers interact with each other:– bottom-up: activation– top-down: execution
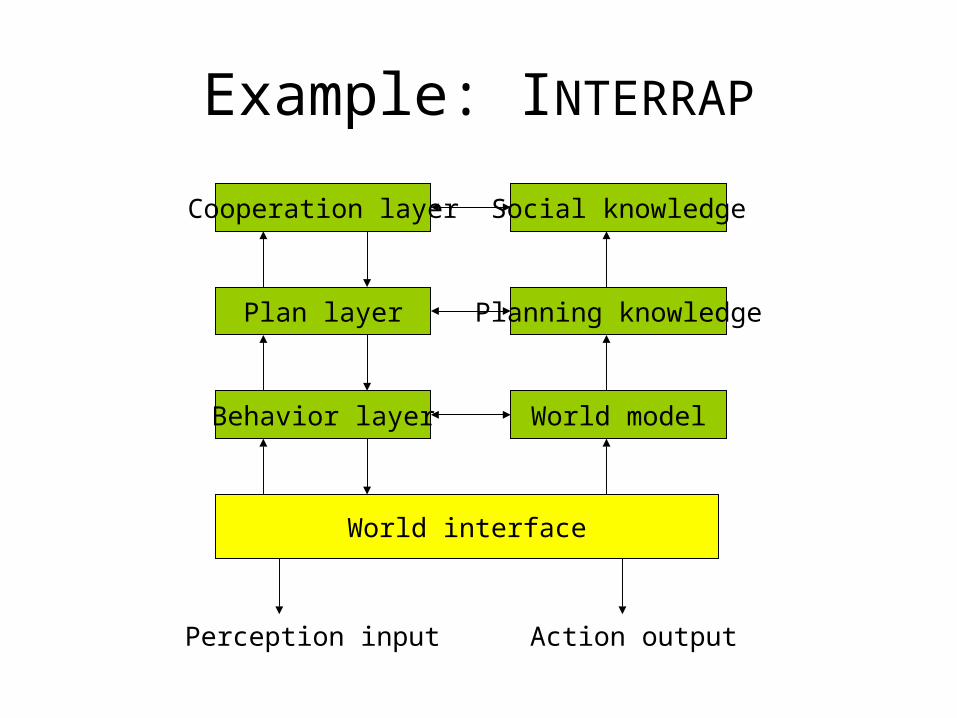
Example: INTERRAP
Cooperation layer
Plan layer
Behavior layer
World interface
Perception input Action output
Social knowledge
Planning knowledge
World model
Belief-Desire-Intention Architecture• Based on practical reasoning and decision on actions.
Involves:– decision on what goals we want to achieve: deliberation
– decision on how to achieve these goals: means-ends reasoning
• Choosing some options creates intentions. These: – usually lead to action
– should persist: • once adopted, an agent should persist with the intention, attempt to achieve
it
• the intention should be dropped if– it is clearly non-achievable
– it was already achieved
– the reason for the intention is not there anymore
– are related to beliefs about the future
BDI Architecture Components• A set of current beliefs about the environment• A belief revision function (brf) - updates current beliefs based
on perception• An option generation function - determines available options
(desires) based on beliefs and intentions• A set of desires (current options) - possible courses of action
available• A set of current intentions - the options the agents is
committed to trying to perform• A filter function (deliberation) - determines new intentions
based on current beliefs, desires, intentions• An action selection function - selects actions based on
intentions
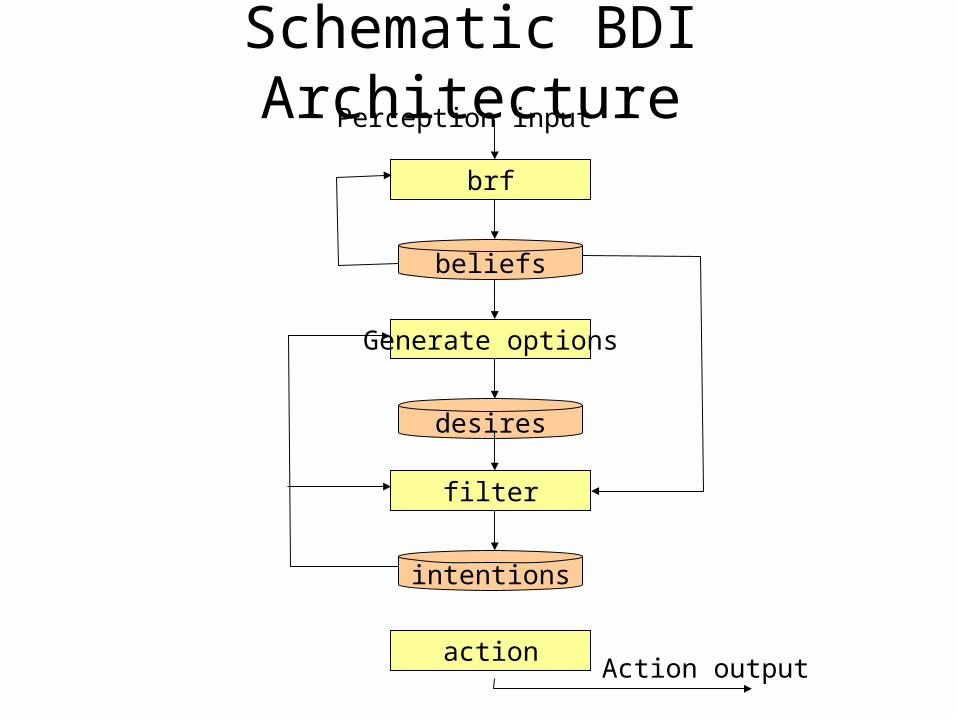
Schematic BDI Architecture
brf
Generate options
filter
action
beliefs
desires
intentions
Action output
Perception input
BDI Pros and Cons• Key problem: difficult to balance between mental
activities– Example: dropping intentions requires reconsideration, which
is costly but needed– Rate of environment change helps set re-consideration
• Questionable: what advantage do mental states provide?
• Intuitive, provides functional decomposition
• Easy to define formally, using logic, and convert to code
Concurrent Architectures(RETSINA: Sycara & al.)
• Include multiple functional and knowledge modules that work concurrently
• Coherence between the functional modules is achieved via shared databases
• Typical functional separation:– communication and collaboration– planning and reasoning– action scheduling – execution and monitoring

Example: RETSINA Agent Architecture

Functional Components
• Communicator: handles incoming and outgoing messages in an ACL. Converts requests into goals/objectives
• Planner: takes objectives and devises detailed plans to achieve them. Creates tasks, actions and new objectives. Uses plan fragments from libraries
• Scheduler: schedules actions for execution• Execution monitor: executes actions and monitors• Coordination/collaboration: reasons for such activities,
may be internal to planner or to communicator• Self-awareness: maintains self model: load, state, etc
11
Planning
• By incremental instantiation of plan fragments
• Conditional planning mechanisms
• Interleaving planning, information gathering, and execution
• Declarative description of information flow and control flow requirements
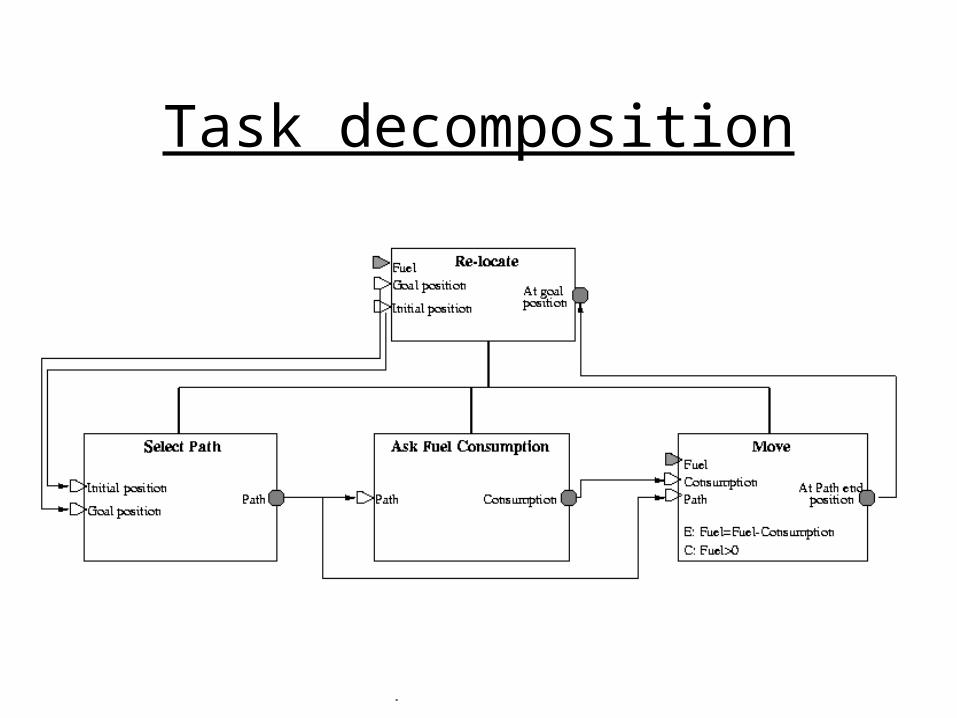
Task decomposition

Knowledge Components• Objective DB: holds the agent’s objectives
• Task DB: holds the agent’s tasks and actions, before they are scheduled for execution
• Schedule: holds scheduled actions
• Task reduction library: includes a set of possible task decompositions
• Task schema library: includes plan fragments, each provides details on how to perform a task
• Beliefs DB: holds the beliefs of the agent regarding information relevant to its activity

Architecture Attributes• Functional components do not directly
interface or synchronize with each other
• Knowledge components do not directly interface or synchronize with each other
• Functional components work concurrently
• These provide: – reusability and substitutability of components– efficient utilization of computational resources– timely task performance– reduced development effort
10
RETSINA Agent Functionality
• Interacts with humans and other agents
• Anticipates and satisfy human information needs
• Provides decision support
• Integrates planning, information gathering and execution
• Acquires, use and disseminate timely and relevant information
• Adapts to user, task and situation