intelligent control of nonlinear systems - iitkhome.iitk.ac.in/~lbehera/indous2/talks_files/day...
TRANSCRIPT

26/10/09 1
Dr. Shubhi Purwar
DEPARTMENT OF ELECTRICAL ENGG.MOTILAL NEHRU NATIONAL INSTITUTE OF TECHNOLOGY
ALLAHABAD 211004
INTELLIGENT CONTROL OF NONLINEAR SYSTEMS
INDIA
26/10/09 2
OutlineMotivation Mathematical modelingNonlinear Control methodsIntelligent ControlFeedback LinearizationBackstepping ControlSliding mode ControlConclusion
26/10/09 3
Virtually all physical systems are nonlinear in nature. Because of the powerful tools established in linear systems, a first step in analyzing the nonlinear system is to linearize it about some nominal operating point.
However linearization alone will not be sufficient as nonlinear control analysis and design provides sharper understanding of the real system.
Motivation

26/10/09 4
Limitations of Linearization:
Approximation in the neighbourhood of operating point, it can predict only local behaviour.
Dynamics have essentially nonlinear phenomena due to the presence of nonlinearity
Finite escape time Multiple isolated equilibria Limit cycles

26/10/09 5
As we move from linear to nonlinear systems, we are faced with a more difficult situation
• The superposition principle does not hold.
• Analysis tools involve more advanced mathematics.
26/10/09 6
The difficulties of complex nonlinear systems can be classified into the following categories-
Presence of nonlinearities
Uncertainty
Computational complexity
26/10/09 7
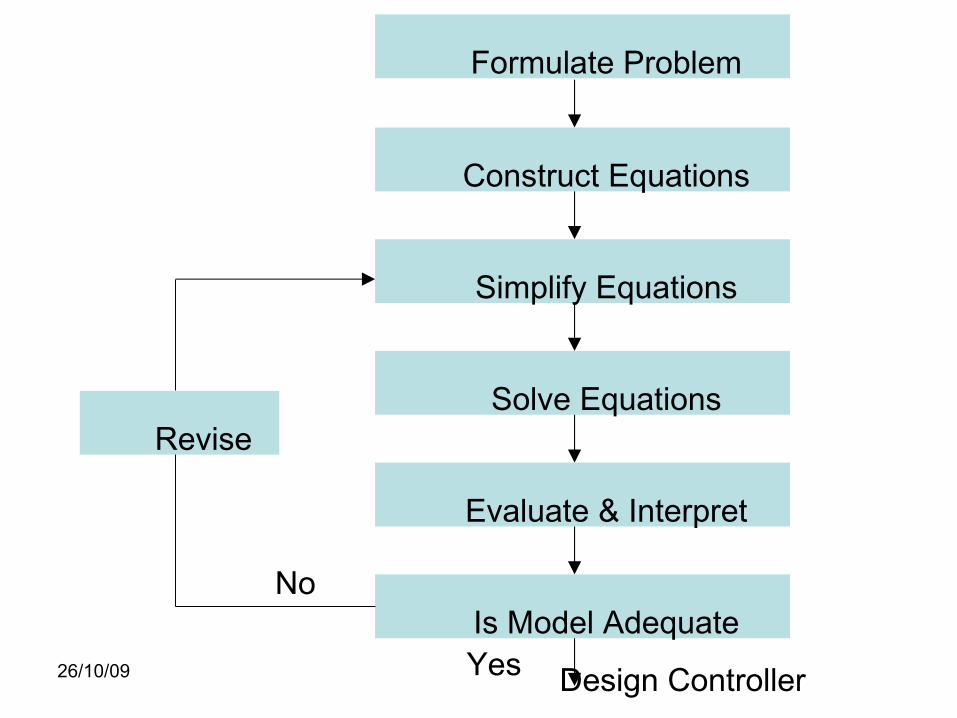
Mathematical Modeling
• For designing a controller, we first need to analyze the plant quantitatively.
• The analysis requires a mathematical description of the interrelations between # system quantities themselves.
# system quantities & system I/P’s.
26/10/09
Formulate Problem
Construct Equations
Simplify Equations
Solve Equations
Evaluate & Interpret
Is Model Adequate
Revise
No
Yes Design Controller
26/10/09 9
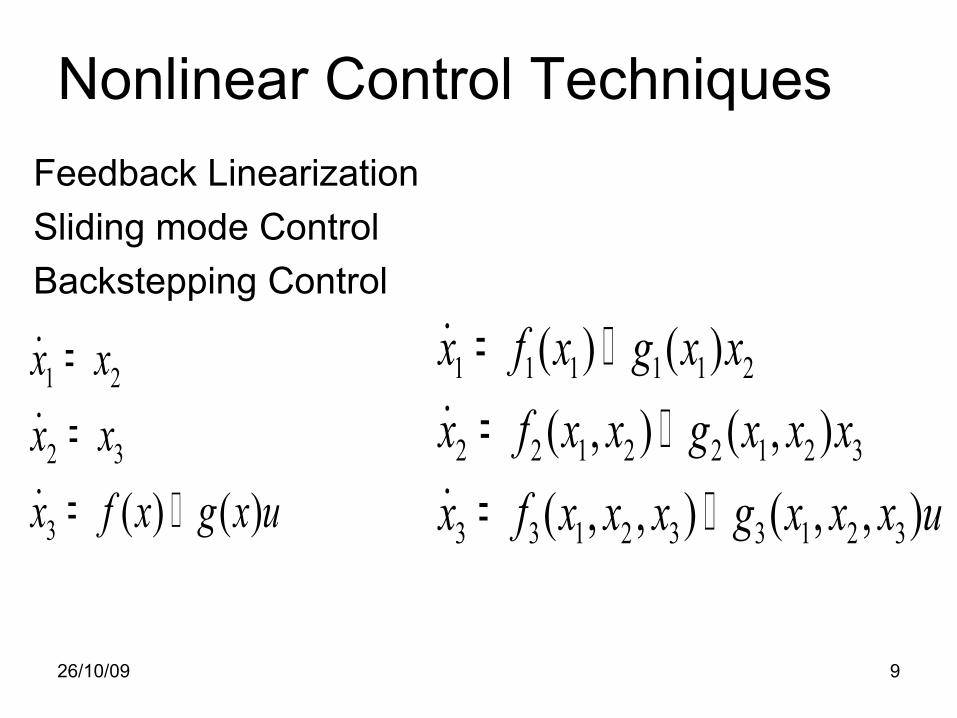
Nonlinear Control TechniquesFeedback LinearizationSliding mode ControlBackstepping Control
1 1 1 1 1 2
2 2 1 2 2 1 2 3
3 3 1 2 3 3 1 2 3
( ) ( )( , ) ( , )( , , ) ( , , )
x f x g x xx f x x g x x xx f x x x g x x x u
= += += +
˙˙˙
1 2
2 3
3 ( ) ( )
x xx xx f x g x u
=== +
˙˙˙
26/10/09 10
Intelligent Control Ability to deal with unknown system
parameters/unknown nonlinearities
Reduce the uncertainty
Plan, generate & execute control action
26/10/09 11
Intelligent Control attempts to build upon and enhance the conventional control methodologies.
Paradigms of Intelligent Control NN FLSProperty- Universal Approximator for a class
of functions on a compact domain.Proof based on Stone-Weierstrass theorem.
26/10/09 12
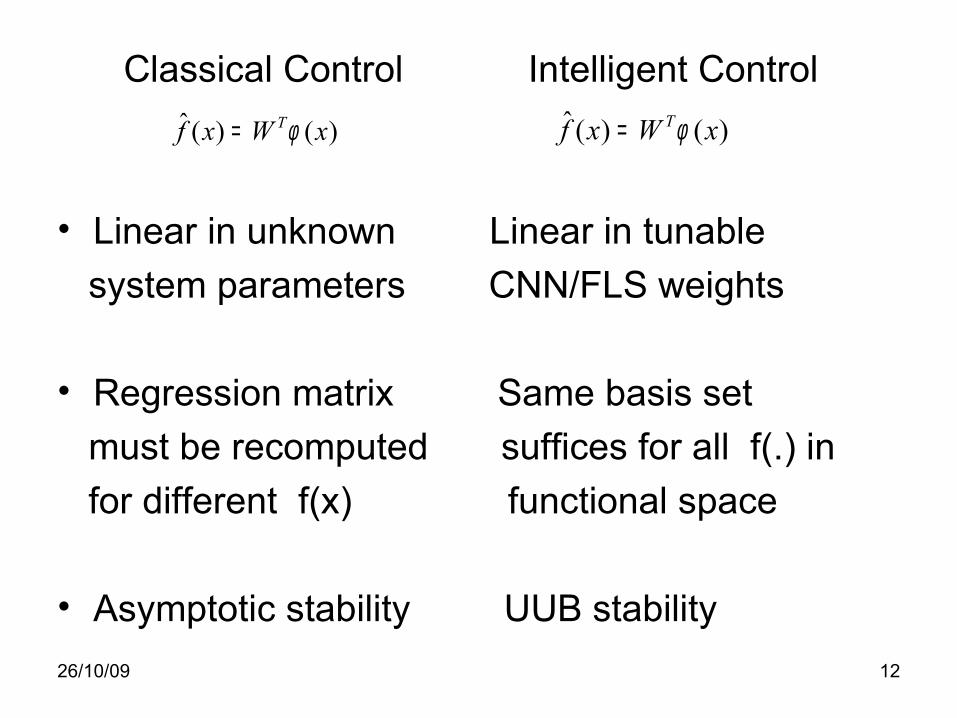
Classical Control Intelligent Control
• Linear in unknown Linear in tunable system parameters CNN/FLS weights
• Regression matrix Same basis set must be recomputed suffices for all f(.) in for different f(x) functional space
• Asymptotic stability UUB stability
ˆ ( ) ( )Tf x W xφ=ˆ ( ) ( )Tf x W xφ=
26/10/09 13
Asymptotic Stability (AS): Classical Adaptive Control
An equilibrium point xe is locally asymptotically stable at t0 if there exists a compact set S such that for every initial condition x0 in S, ║x(t)-xe║→0 as t → ∞.
26/10/09 14
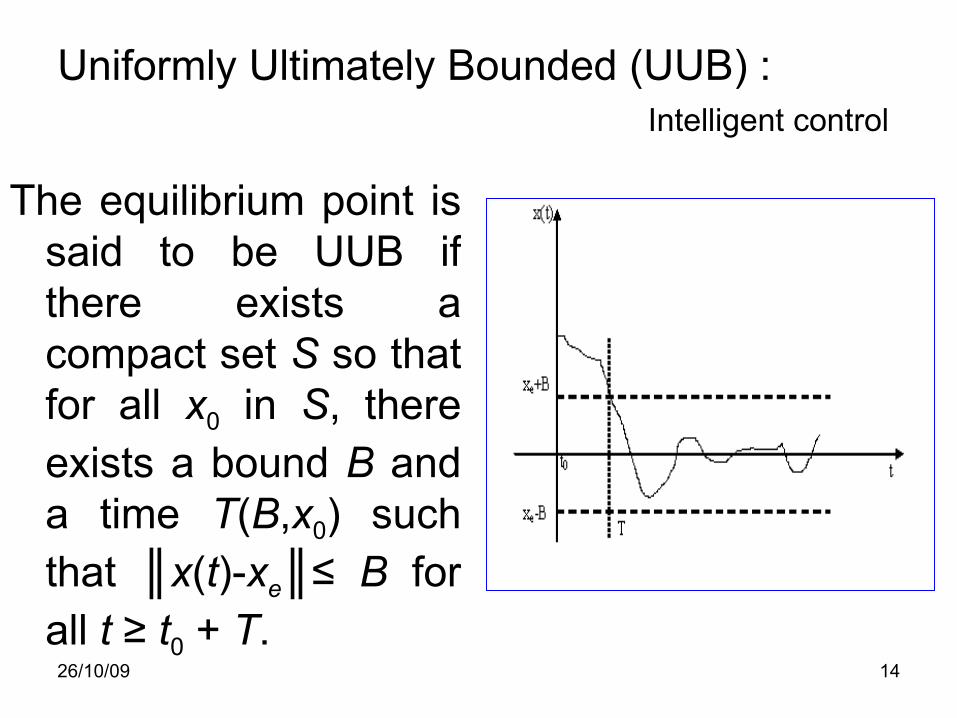
Uniformly Ultimately Bounded (UUB) : Intelligent control
The equilibrium point is said to be UUB if there exists a compact set S so that for all x0 in S, there exists a bound B and a time T(B,x0) such that ║x(t)-xe║≤ B for all t ≥ t0 + T.

26/10/09 15
Feedback Linearization
The idea of feedback linearization is to algebraically transform a nonlinear system dynamics into a linear one so that linear control techniques can be applied.
Input-State LinearizationInput-Output Linearization
26/10/09 16
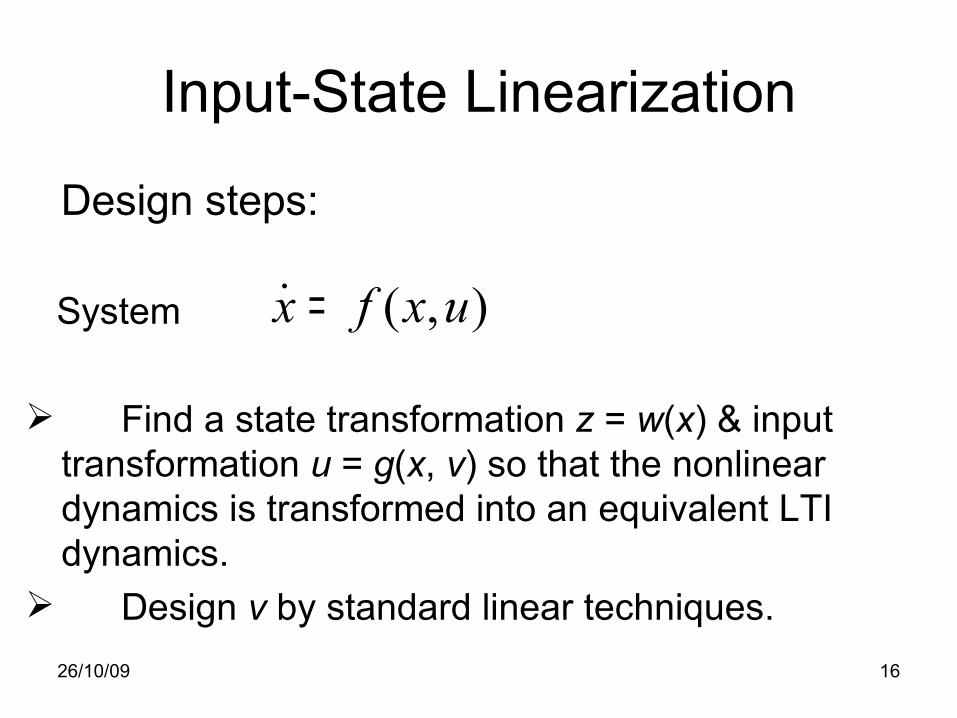
Input-State Linearization
Design steps:
System
Find a state transformation z = w(x) & input transformation u = g(x, v) so that the nonlinear dynamics is transformed into an equivalent LTI dynamics.
Design v by standard linear techniques.
( , )x f x u=˙

26/10/09 17
0_
Pole placement loop
Linearization loop
z = w(x)
v = -kTz u = g(x,v) ( , )x f x u=˙x
Inner loop: Linearization of input-state relation
Outer loop: Stabilization of closed loop dynamics
26/10/09 18
MATHEMATICAL TOOLS
•Lie algebra
•Frobenius Theorem
Control laws derived are often complex due to the need to determine nonlinear state space transformations.

26/10/09 19
Control design based on input-output linearization is done in 3 steps:
• Differentiate the output y until the input u appears
• Choose u to cancel the nonlinearities and guarantee tracking convergence
• Study the stability of the internal dynamics
Input-Output Linearization
26/10/09 20
Objective
Given desired trajectories for robot
determine a control law using feedback linearization that achieves
tlim ( ) dq t q→ ∞ =
( ) ( , ) ( ) disM q q C q q q G q τ τ+ + + =˙̇ ˙ ˙
26/10/09 21
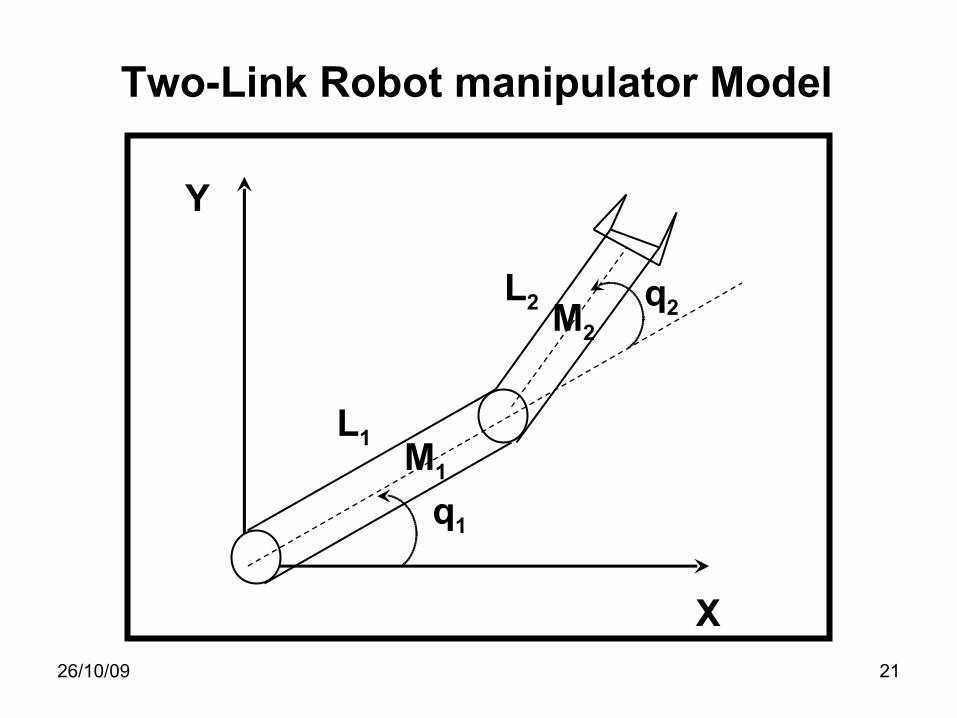
X
Y
q2
q1
M2
M1
L2
L1
Two-Link Robot manipulator Model

26/10/09 22
1
d( ) [ , y ,.... ]n Td d d
dT
x t y yE X Xr E
−== −
= Λ
˙
1
11
( ) ( )
dn
nd d i i
i
r f X g X u d Y
Y y eλ−
+=
= + + +
≡ − + ∑˙
[ ]1 ( )( ) v du f X K r Y d
g X= − − − −
max2
1 ˆ ˆ[ ( , ) ]( )
ˆ( )
c r
v d
r z
u f W X v ug X
v K r Y d
u K W W
= − + +
= − − −
= − +
2ˆ ˆ( )W M X r kM r Wφ= −˙
ˆ ˆ( ) ( )Tf X W Xφ=UXXGXXFX
XX),(),( 211212
21
+=
=˙
˙
26/10/09 23
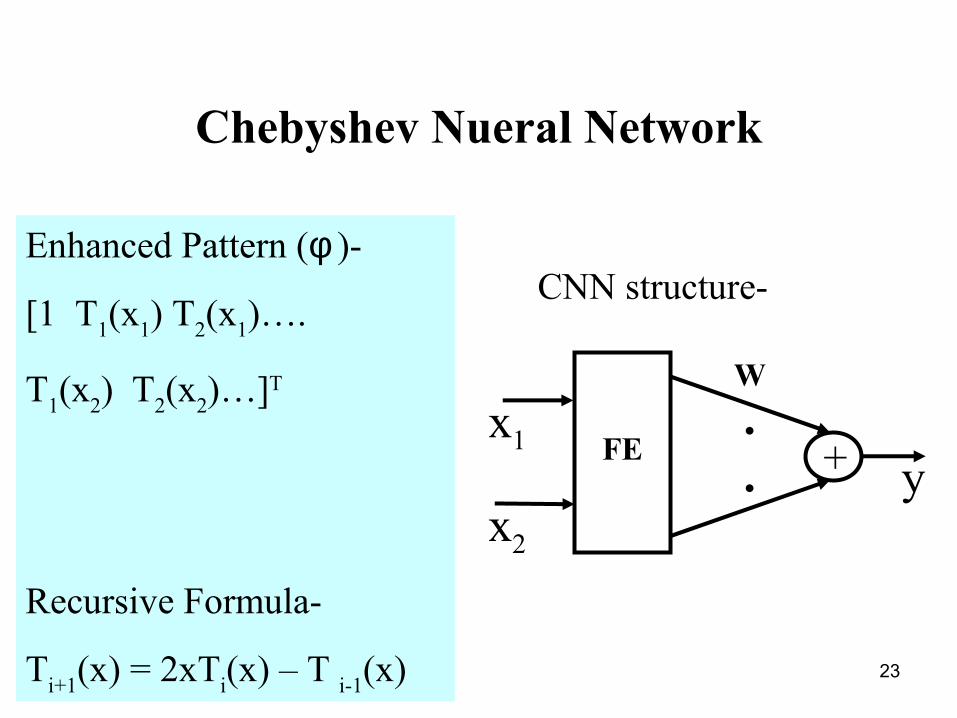
Chebyshev Nueral Network
Enhanced Pattern (φ )-
[1 T1(x1) T2(x1)….
T1(x2) T2(x2)…]T
Recursive Formula-
Ti+1(x) = 2xTi(x) – T i-1(x)
CNN structure-
.
.
.FE
x1
x2
+ y
W

26/10/09 24
Joint Tracking (CNN)
Solid – DesiredDashed - Actual
Time(sec)
0 1 2 3 4 5 6 7 8 9 10-1.5
-1
-0.5
0
0.5
1
1.5
RadiansSolid – DesiredDashed - Actual
Tracking error (Joint 1)
Time(sec)
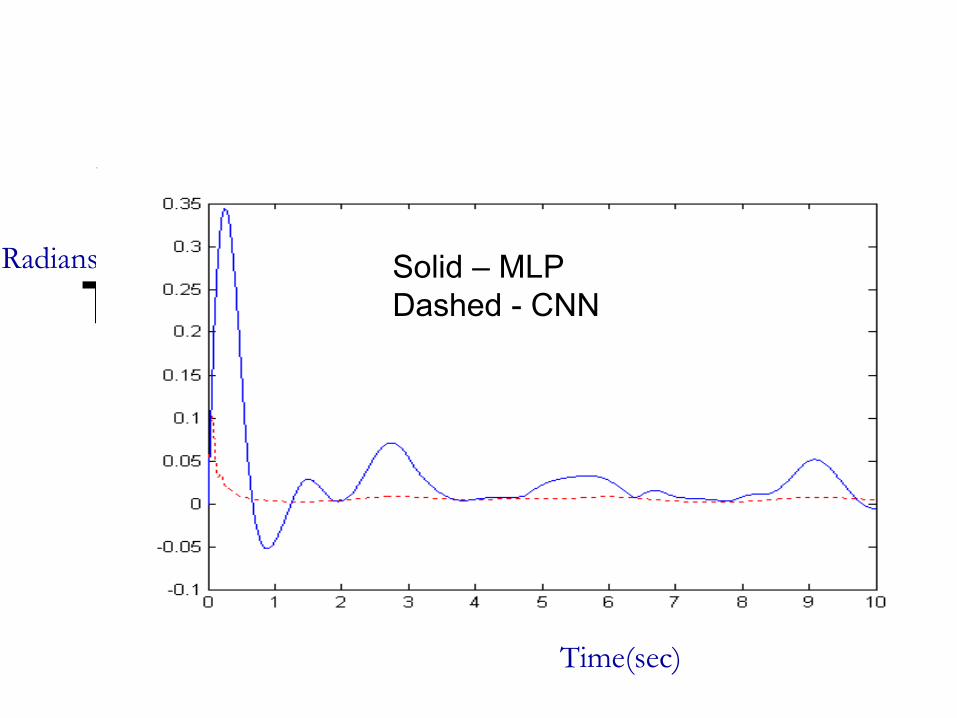
Radians Solid – MLPDashed - CNN

26/10/09 26
Tracking error (Joint 2)
Solid – MLPDashed - CNN
Radians

26/10/09 27
Conclusions
Can be applied forStabilization & Tracking controlSISO & MIMO systems
LimitationsCannot be applied to all nonlinear systemsFull state has to be measured
26/10/09 28
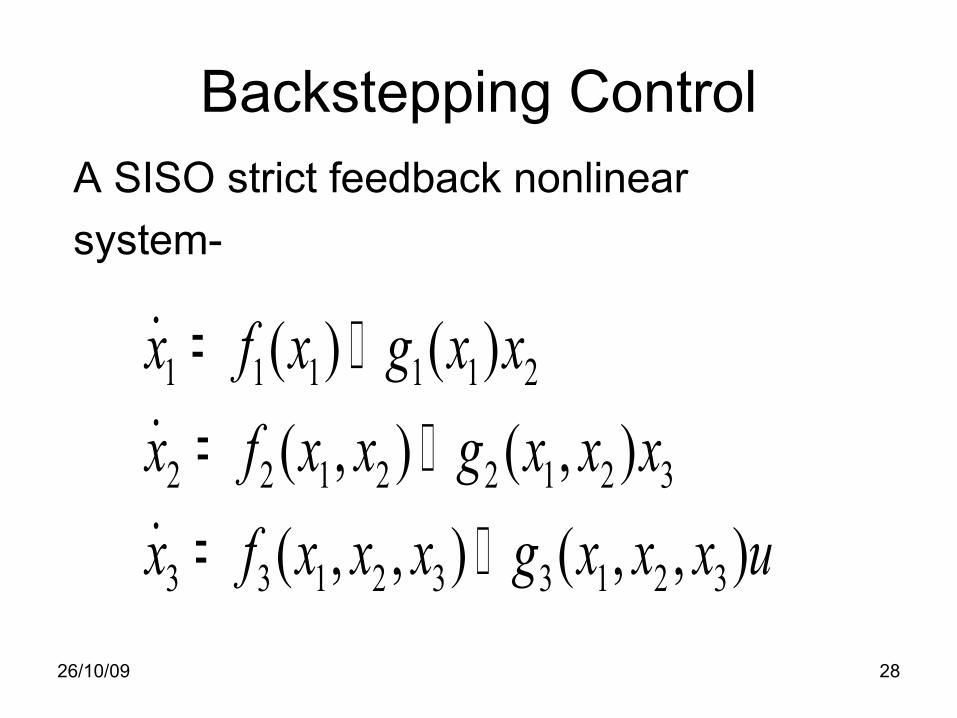
Backstepping ControlA SISO strict feedback nonlinear system-
1 1 1 1 1 2
2 2 1 2 2 1 2 3
3 3 1 2 3 3 1 2 3
( ) ( )( , ) ( , )( , , ) ( , , )
x f x g x xx f x x g x x xx f x x x g x x x u
= += += +
˙˙˙
26/10/09 29
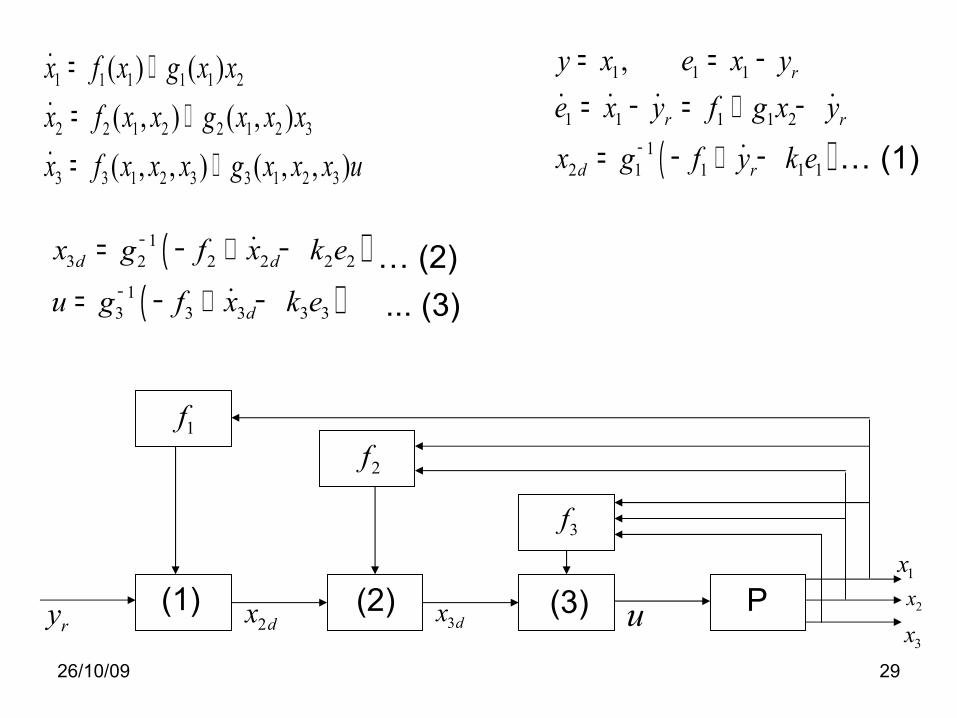
1 1 1 1 1 2
2 2 1 2 2 1 2 3
3 3 1 2 3 3 1 2 3
( ) ( )( , ) ( , )( , , ) ( , , )
x f x g x xx f x x g x x xx f x x x g x x x u
= += += +
˙˙˙ ( )
1 1 1
1 1 1 1 21
2 1 1 1 1
, r
r r
d r
y x e x ye x y f g x yx g f y k e−
= = −= − = + −
= − + −
˙ ˙ ˙ ˙
˙
( )( )
13 2 2 2 2 2
13 3 3 3 3
d d
d
x g f x k e
u g f x k e
−
−
= − + −
= − + −
˙
˙
… (1)
… (2) ... (3)
1f2f
3f
ry 2dx 3dx u1x
2x
3x(1) (2) (3) P
26/10/09 30
11
11
( )
( )
li
li
Mn li i jA
lj M
ni iA
l
x yy
x
µ
µ
==
==
Π=
Π
∑
∑
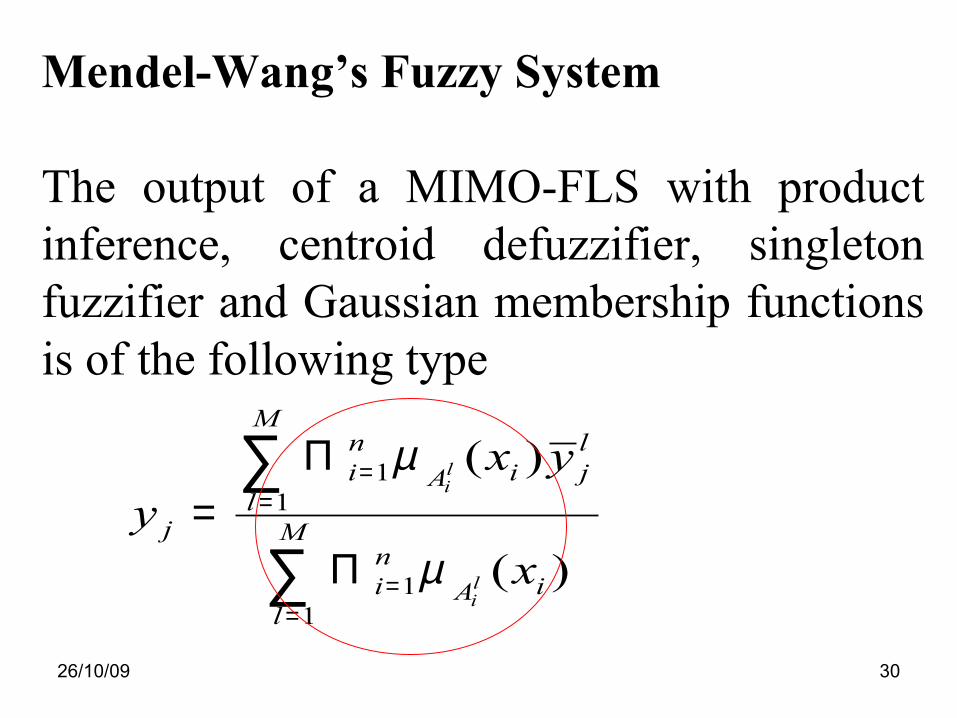
Mendel-Wang’s Fuzzy System
The output of a MIMO-FLS with product inference, centroid defuzzifier, singleton fuzzifier and Gaussian membership functions is of the following type
26/10/09 31
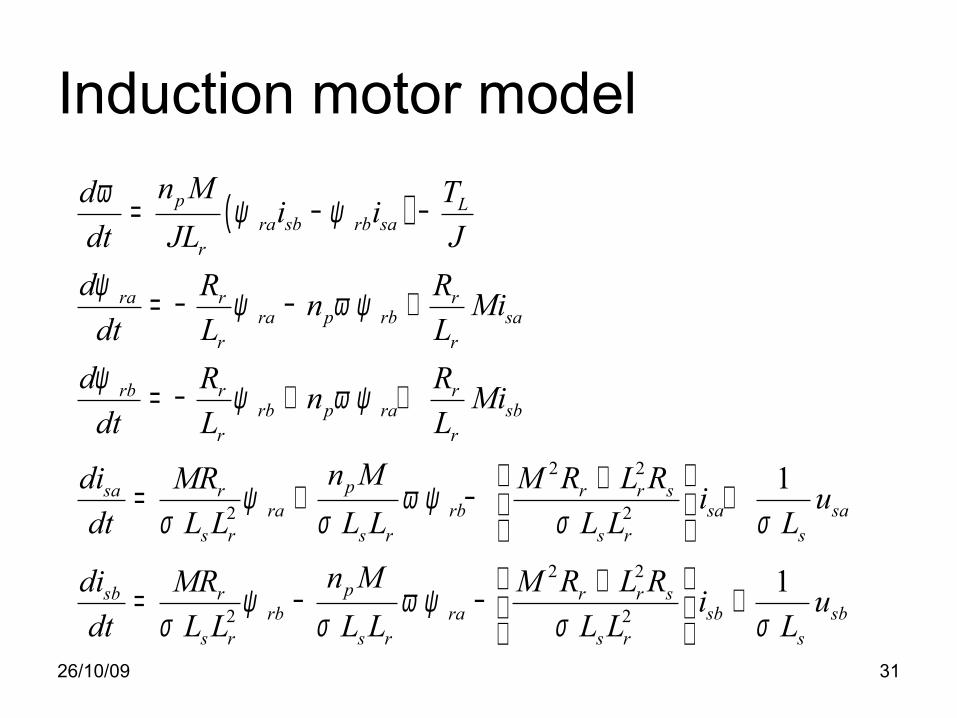
Induction motor model
( )
2 2
2 2
2 2
2
1
p Lra sb rb sa
r
ra r rra p rb sa
r r
rb r rrb p ra sb
r r
psa r r srra rb sa sa
s r s r s r s
psb r r srrb ra
s r s r
n Md Ti idt JL Jd R Rn Mi
dt L Ld R Rn Mi
dt L Ln Mdi M R L RMR i u
dt L L L L L L L
n Mdi M R L RMRdt L L L L
ω ψ ψ
ψ ψ ω ψ
ψ ψ ω ψ
ψ ω ψσ σ σ σ
ψ ω ψσ σ σ
= − −
= − − +
= − + +
+= + − +
+= − − 2
1sb sb
s r s
i uL L Lσ
+
26/10/09 32
Problem Statement
The control objective is to track the rotor speed and the magnetic flux magnitude of the induction motor to the desired reference levels i.e.,
t
t
lim ( ) ( ) &
lim ( ) ( )
r
rd d
t t
t t
ω ω
ψ ψ
→ ∞
→ ∞
=
=
26/10/09 33
Constraints
Rotor fluxes are not measurable.
Stator currents should be limited.
Load torque and rotor resistance are unknown.
26/10/09 34
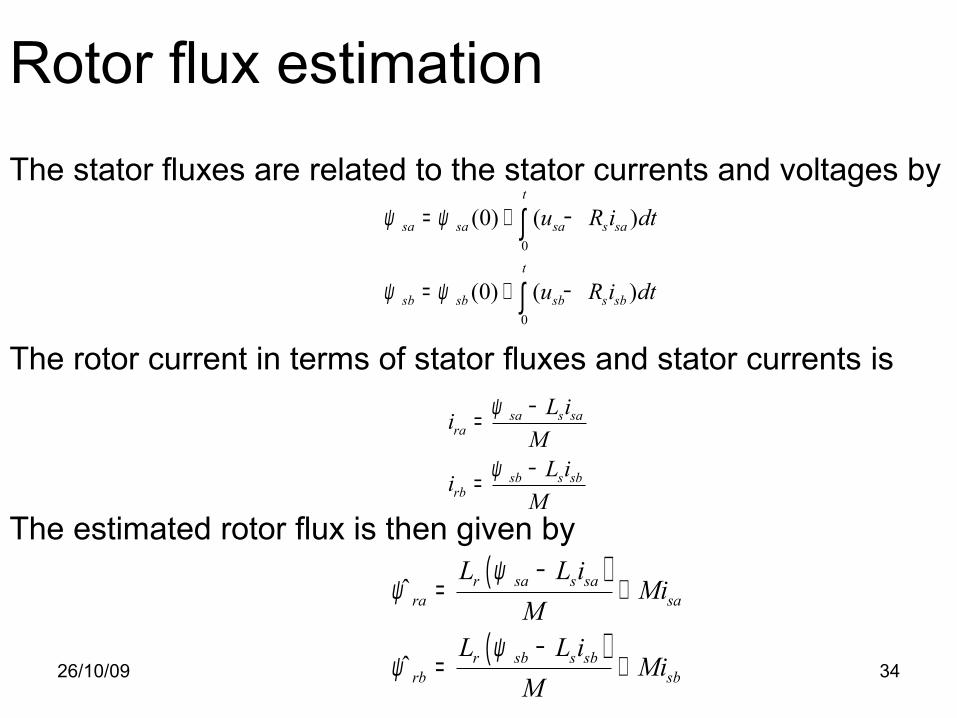
Rotor flux estimation
0
0
(0) ( )
(0) ( )
t
sa sa sa s sa
t
sb sb sb s sb
u R i dt
u R i dt
ψ ψ
ψ ψ
= + −
= + −
∫
∫
sa s sara
sb s sbrb
L iiM
L iiM
ψ
ψ
−=
−=
( )
( )
ˆ
ˆ
r sa s sara sa
r sb s sbrb sb
L L iMi
ML L i
MiM
ψψ
ψψ
−= +
−= +
The stator fluxes are related to the stator currents and voltages by
The rotor current in terms of stator fluxes and stator currents is
The estimated rotor flux is then given by

26/10/09 35
Stator current limitation
*1si
*2 si
sin θ
Is Is*
2*1si
2*2 si
cos θ i1*
i2*
+
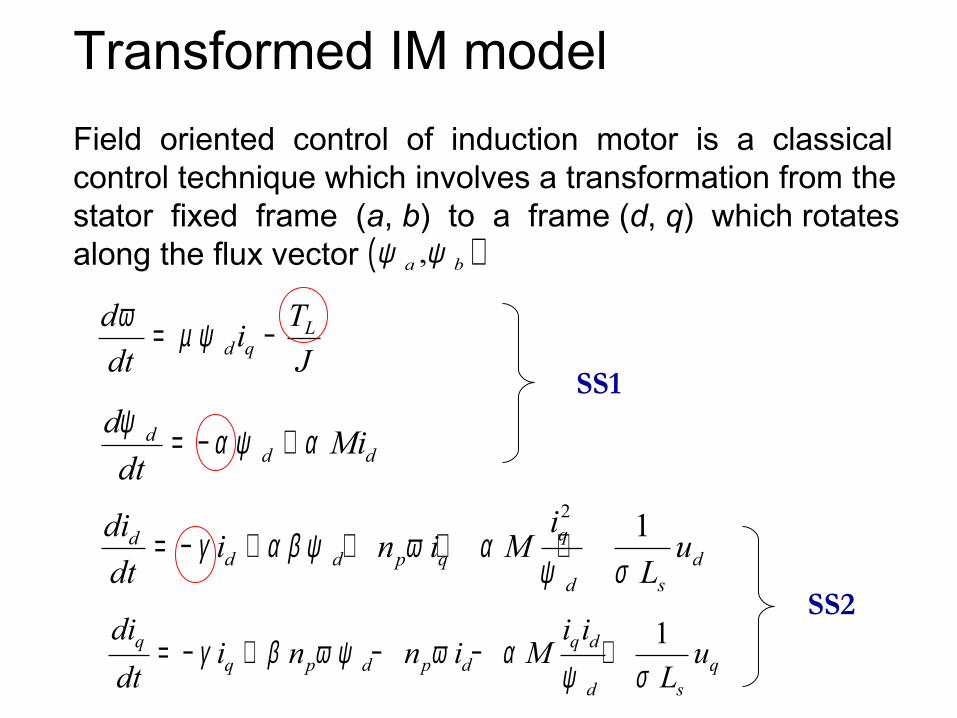
Transformed IM modelField oriented control of induction motor is a classical control technique which involves a transformation from the stator fixed frame (a, b) to a frame (d, q) which rotatesalong the flux vector
dd d
d Midtψ α ψ α= − +
2 1qdd d p q d
d s
idi i n i M udt L
γ α β ψ ω αψ σ
= − + + + +
1q q dq p d p d q
d s
di i ii n n i M u
dt Lγ β ω ψ ω α
ψ σ= − + − − +
( ),a bψ ψ
Ld q
d Tidt Jω µ ψ= −
SS1
SS2
26/10/09 37
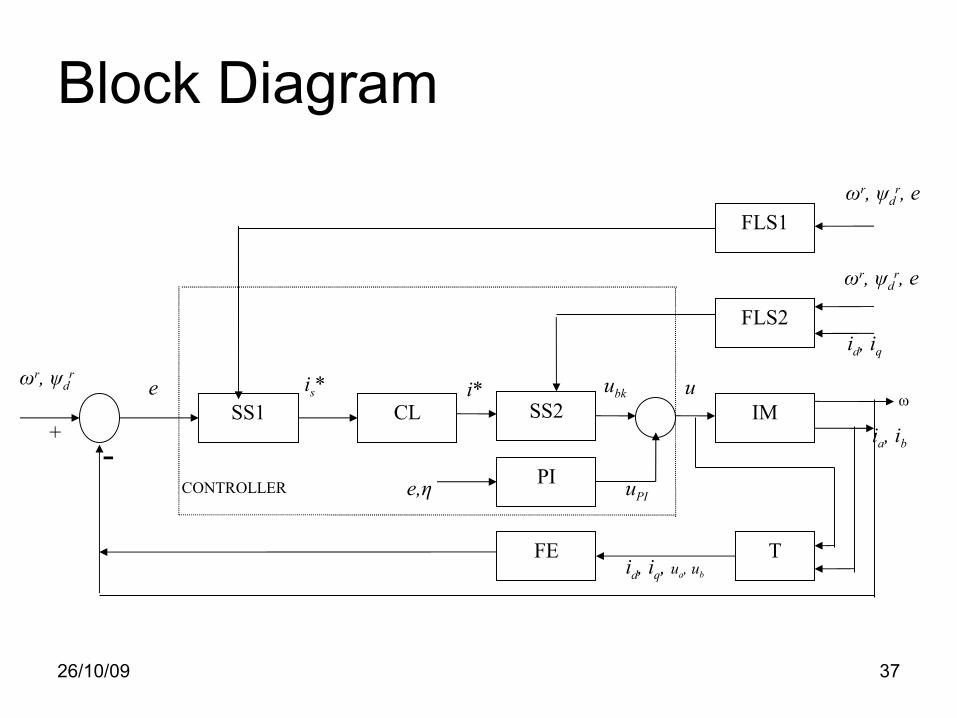
Block Diagram
ωr, ψdr is* i*
PICONTROLLER
SS2u
e,η
ubk
uPI
FE Tid, iq, ua, ub
FLS1
FLS2
SS1 CL IM
ωr, ψdr, e
e
ωr, ψdr, e
id, iq
ia, ib+
-ω

26/10/09 38
Controller design
11 1De = F +F + G iknown˙ ˆ* -1s 1 1 1 1i = G -F -F -K eknown
2 2 2η = F +F + G uknown˙
2
ˆ ˆ
ˆ ˆ1 1 1
2 2
F = Wφ
F = Wφ
T
T
ˆ ˆ
ˆ ˆ1 1 1 1 1 1
2 2 2 2 2 2
W = Γ φ e - Γ E W
W = Γ φ η - Γ E W
κ
κ
˙
˙
FLS1 - ωr, ψdr, e1, e2 - (20x1) and - (20x2)⇒ 1φ ˆ
1W
FLS2 - ωr, ψdr, e1, e2, id, iq - (30x1) and - (30x2)⇒ 2φ ˆ
2W
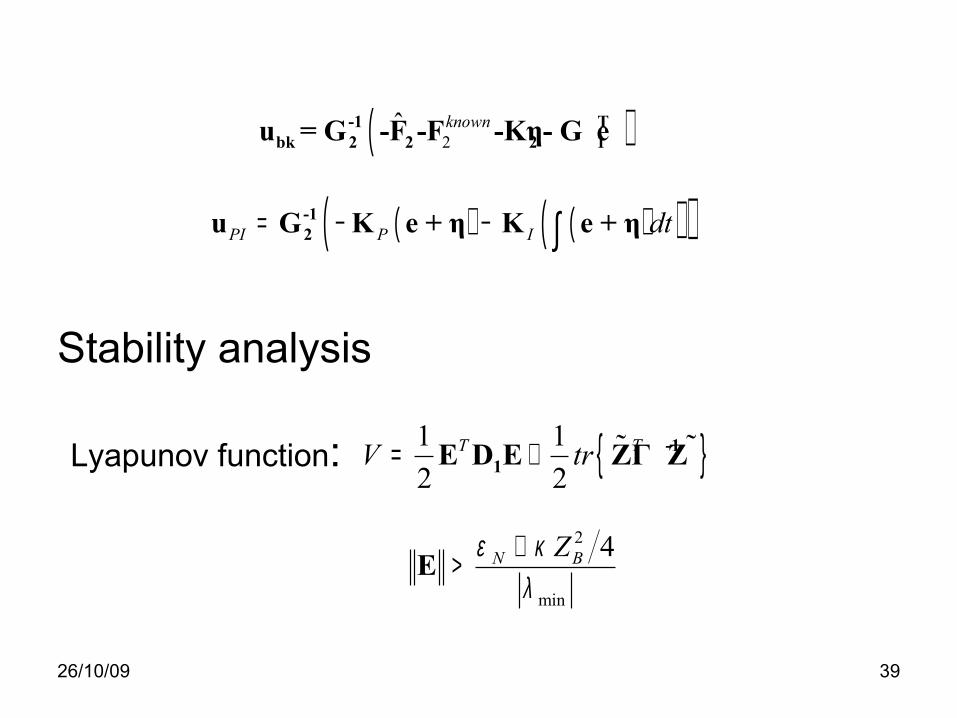
26/10/09 39
Stability analysis
{ }1 12 2
-11E D E ZΓ ZT TV tr= +
2
min
4N BZε κλ
+>E
( )2ˆ-1 T
bk 2 2 2 1u = G -F -F -Kη- G eknown
( ) ( )( )( )-12u G K e + η K e + ηPI P I dt= − − ∫
Lyapunov function:
26/10/09 40
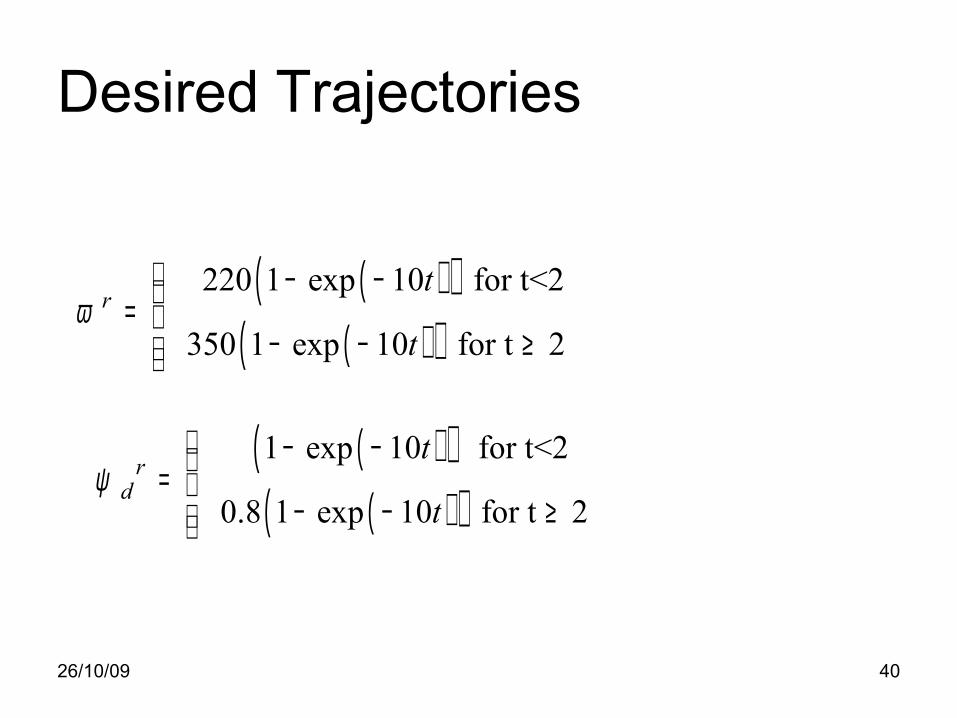
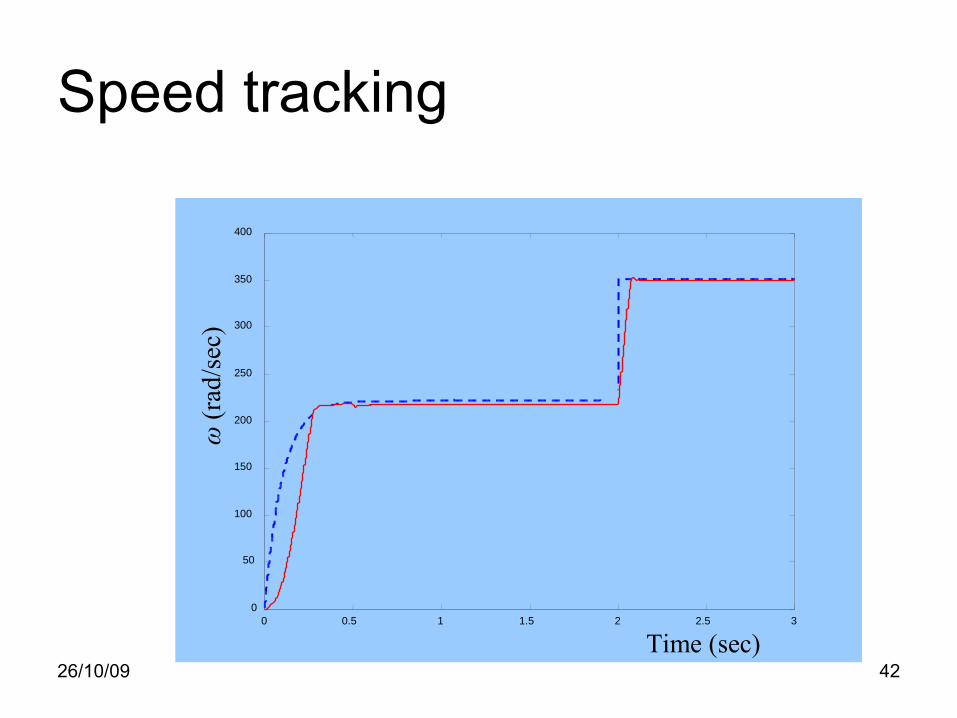
Desired Trajectories
( )( )( )( )
220 1 exp 10 for t<2
350 1 exp 10 for t 2 r
t
tω
− −= − − ≥
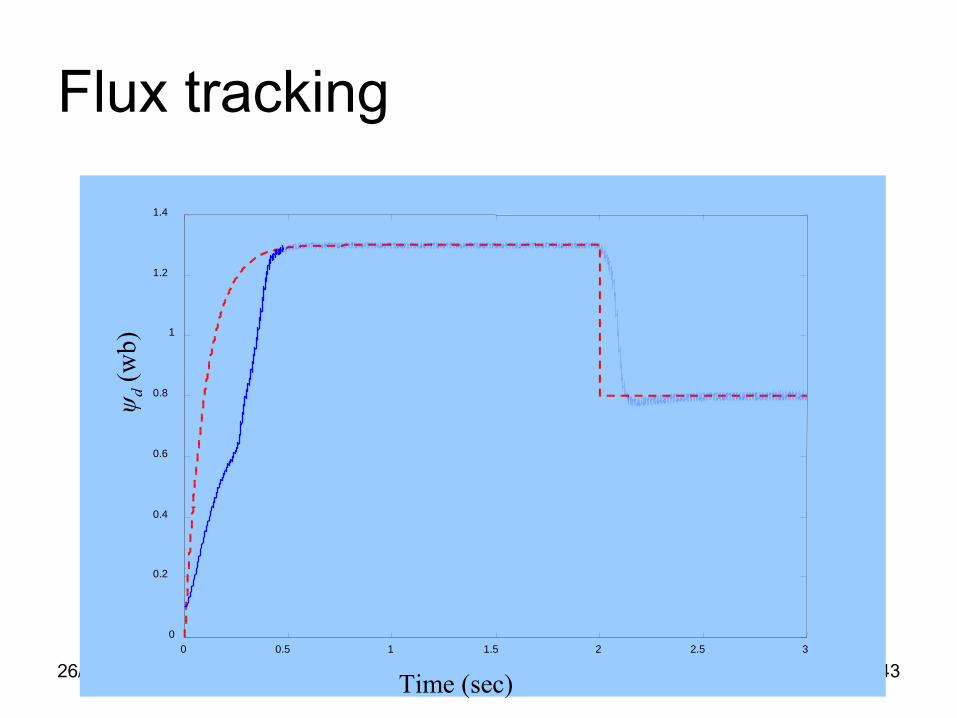
( )( )( )( )
1 exp 10 for t<2
0.8 1 exp 10 for t 2 r
d
t
tψ
− −= − − ≥
26/10/09 41
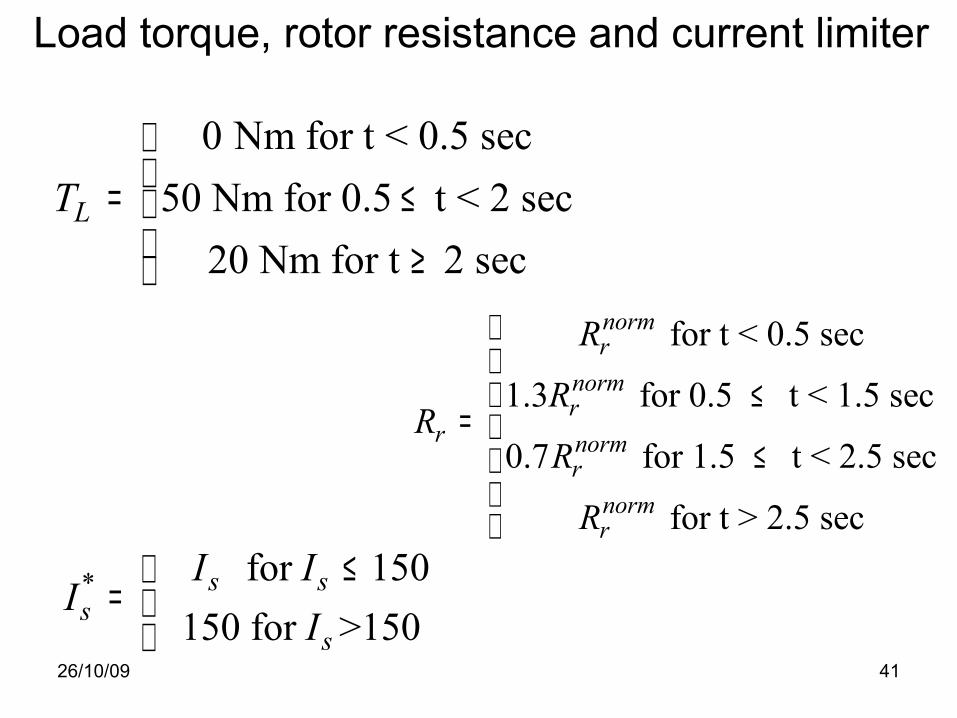
Load torque, rotor resistance and current limiter
0 Nm for t < 0.5 sec50 Nm for 0.5 t < 2 sec
20 Nm for t 2 secLT
= ≤ ≥
* for 150 150 for >150
s ss
s
I II
I≤
=
for t < 0.5 sec
1.3 for 0.5 t < 1.5 sec
0.7 for 1.5 t < 2.5 sec
for t > 2.5 sec
normr
normr
r normr
normr
R
RR
R
R
≤=
≤
26/10/09 42
Speed tracking
0 0.5 1 1.5 2 2.5 30
50
100
150
200
250
300
350
400ω
(rad
/sec
)
Time (sec)
26/10/09 43
Flux tracking
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (sec)
ψ d (w
b)

26/10/09 44
Current waveform
0 0.5 1 1.5 2 2.5 3
-150
-100
-50
0
50
100
150
Time (sec)
i a (am
p)
26/10/09 45
Conclusions
Flux measurements are not required
With unknown rotor resistance and load torque tracking performance is achieved
Stator currents are within practical limits

26/10/09 46
Sliding Mode ControlThe main advantage of Sliding Mode Control (SMC) is the robustness to modelling errors and unknown disturbances.
Traditional SMC was, however, limited by a
discontinuous control law.
There are techniques to limit and eliminate the high-frequency switching associated with traditional SMC.
Two SMC techniques utilizing a robot manipulator to eliminate the limitation of the discontinuous control law are presented.
26/10/09 47
SMC Design Methodology
• Design a sliding manifold or sliding surface in state space.
• Design a controller to reach the sliding surface in finite time.
• Design a control law to confine the desired state variables to the sliding manifold.

26/10/09 48
SMC Graphical Illustration
26/10/09 49
Objective
( ) ( , ) ( ) disM q q C q q q G q τ τ+ + + =˙̇ ˙ ˙
tlim ( ) dq t q→ ∞ =
Given desired trajectories for robot
determine a control law using sliding mode technique which achieves the following goal
26/10/09 50
CSMC Controller
Define tracking error & sliding surface as
de = q - q.
s = e+λe
r dq = q - s = q -λe˙ ˙ ˙ r dq = q - s = q -λe˙̇ ˙̇ ˙ ˙̇ ˙
sgn( )^
τ = τ- K s ˆ ˆˆˆ.. .
r rτ = M q + Cq + G - As
Choose the control input
The reference states are given by
26/10/09 51
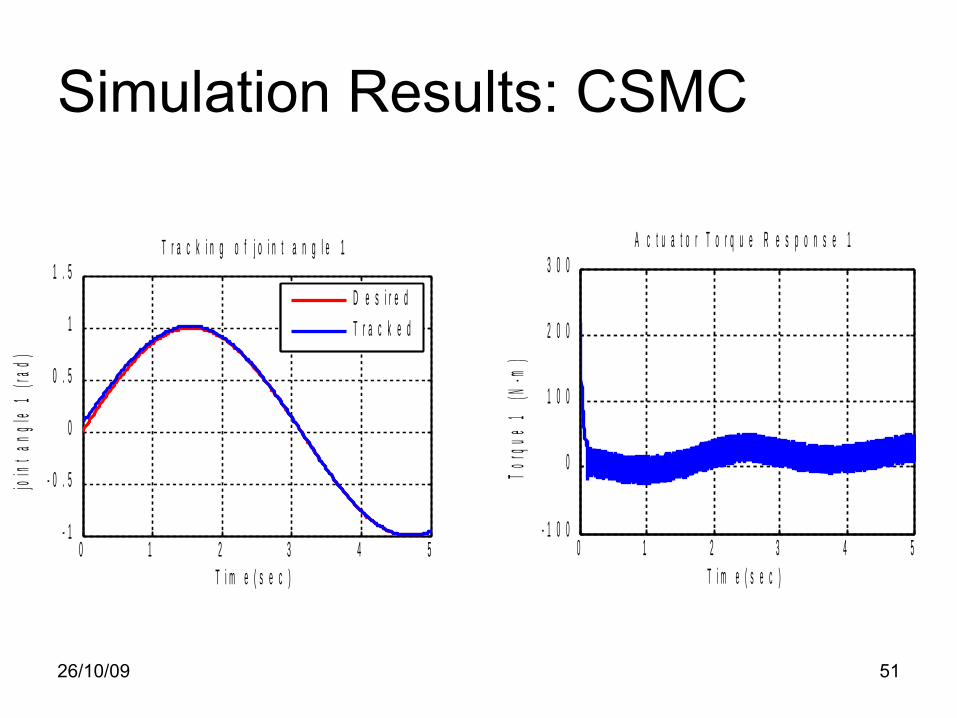
Simulation Results: CSMC
0 1 2 3 4 5- 1
- 0 . 5
0
0 . 5
1
1 . 5T r a c k i n g o f j o i n t a n g l e 1
T i m e ( s e c )
join
t ang
le 1
(rad
)
D e s i r e d
T r a c k e d
0 1 2 3 4 5- 1 0 0
0
1 0 0
2 0 0
3 0 0A c t u a t o r T o r q u e R e s p o n s e 1
T i m e ( s e c )
Torq
ue 1
(N-
m)

26/10/09 52
CSMC
0 1 2 3 4 5- 0 . 2
- 0 . 1
0
0 . 1
0 . 2T r a c k i n g e r r o r s o f j o i n t a n g l e s
T i m e ( s e c )
erro
rs o
f jo
int
angl
es (
rad) e r r o r o f j o i n t 1
e r r o r o f j o i n t 2
26/10/09 53
FSMC Controller
Choose the control input ˆ ˆˆ= −
.. .
r rτ M q + Cq + G - As k
1,... ,... Ti nk k k= k
( )
( )
m
m
A1 1
A1
µ( )
µ
i
i i
nMmk i
Tm ii k k iM
im
sk s
s
θ= =
=
= =∑ ∏
∑θ ψ
26/10/09 54
HOSMC Controller
• HOSMC eliminates chattering while retaining the main properties of FOSMC.
• It is characterized by a discontinuous control acting on higher order time derivatives of the sliding variable.
• Order of the sliding mode is the order of the first continuous total time derivative of the sliding variable.
26/10/09 55
Relative Degree
( , ) ( , ) , 0
d
r r
y y
h t x g t x u gu
σ
σ σ
= −∂= + = ≠
∂
( , ) ( , ) , , output , input nx a t x b t x u x R y u R= + ∈ ∈˙
The number r of the first total derivatives where
the control explicitly appears with a non-zero
coefficient.
26/10/09 56
u signα σ= −
( ) ( )1 12 2u signα= − σ + σ σ σ + σ˙ ˙
1 12 2
2 2 23 3 3
.. . . .. .2 2u signα σ σ σ σ σ σ σ σ σ
− = − + + + + +
r =1-3
In practice r = 2, 3, 4, 5 (mechanical systems)

26/10/09 57
Define
dσ = e = q - q
ˆ sτ = τ + τ
( ) ( )1 12 2signα= −sτ σ + σ σ σ + σ˙ ˙
26/10/09 58
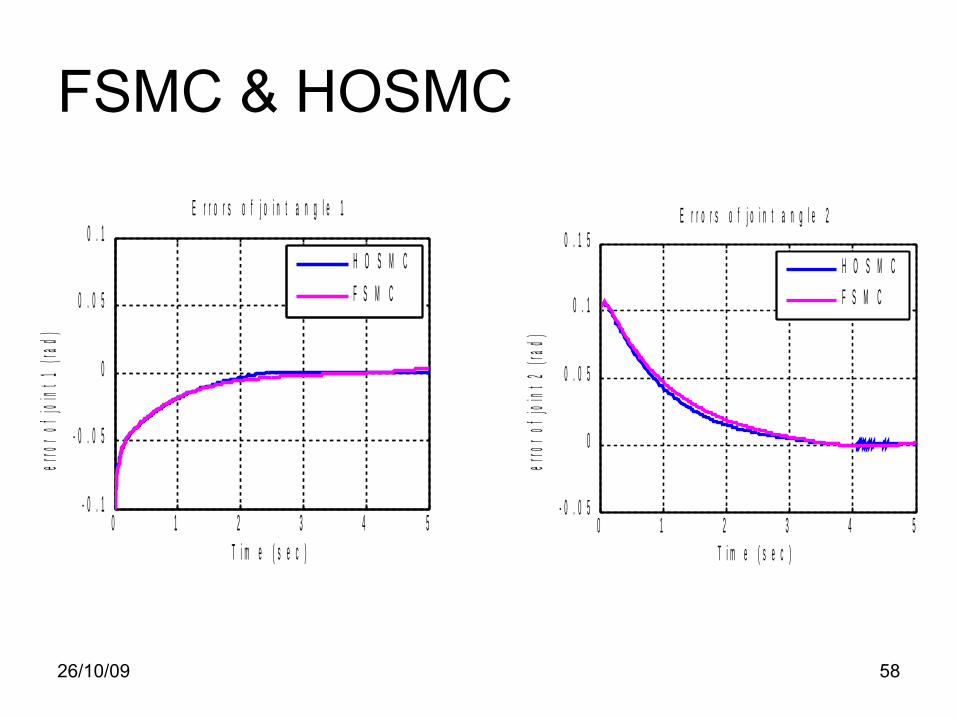
FSMC & HOSMC
0 1 2 3 4 5- 0 . 1
- 0 . 0 5
0
0 . 0 5
0 . 1E r r o r s o f j o i n t a n g l e 1
T i m e ( s e c )
erro
r of j
oint 1
(rad
)
H O S M C
F S M C
0 1 2 3 4 5- 0 . 0 5
0
0 . 0 5
0 . 1
0 . 1 5E r r o r s o f j o i n t a n g l e 2
T i m e ( s e c )er
ror o
f joi
nt 2
(rad
)
H O S M C
F S M C
26/10/09 59
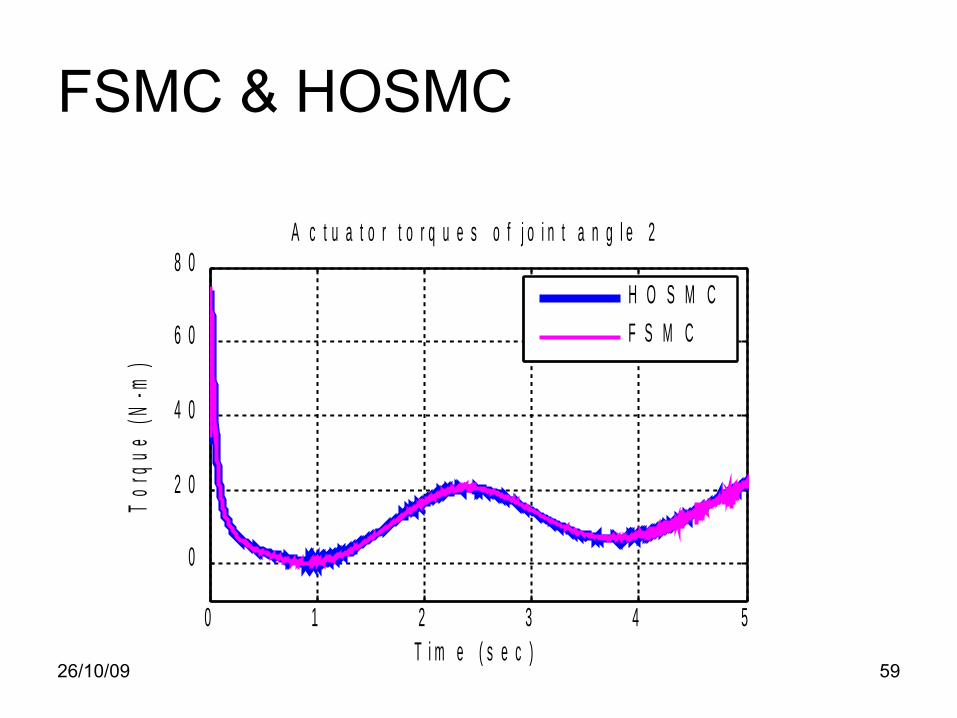
FSMC & HOSMC
0 1 2 3 4 5
0
2 0
4 0
6 0
8 0A c t u a t o r t o r q u e s o f j o i n t a n g l e 2
T i m e ( s e c )
Tor
que
(N-m
)
H O S M C
F S M C
26/10/09 60
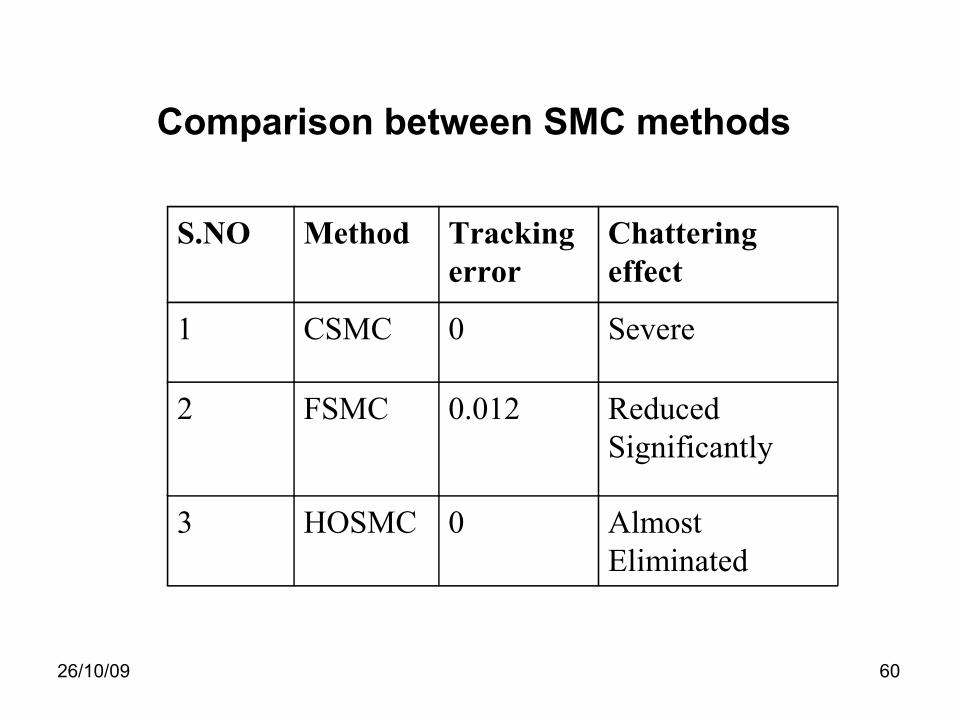
Comparison between SMC methods
S.NO Method Tracking error
Chattering effect
1 CSMC 0 Severe
2 FSMC 0.012 Reduced Significantly
3 HOSMC 0 Almost Eliminated

26/10/09 61
Summary Direct adaptive controller using NN/FLS for
companion form & strict feedback form nonlinear systems.
Controller structures are based on feedback linearization, backstepping and sliding mode based output feedback law.
The feedback control law which is a nonlinear function of system states is approximated using NN/FLS.
26/10/09 62
The tracking errors and weights of NN/FLS are uniformly ultimately bounded.
Efficacy of the proposed techniques is verified through simulation results.
Simulation results are verified on Induction motor & 2-link robot

26/10/09 63
Thank You