international conference on ocean, offshore and arctic ... · formulas based on blevins’ model...
TRANSCRIPT

1 Copyright © 2015 by ASME
Proceedings of the 34th
International Conference on Ocean, Offshore and Arctic Engineering OMAE2015
May 31- June 5, 2015, St. John’s, Newfoundland and Labrador, Canada
OMAE2015-41443
HYDRODYNAMIC COEFFICIENT MAPS FOR RISER INTERFERENCE ANALYSIS
Suneel Patel 2H Offshore Inc.
Houston, TX, U.S.A.
Shankar Sundararaman 2H Offshore Inc.
Houston, TX, U.S.A.
Pete Padelopoulos 2H Offshore Inc.
Houston, TX, U.S.A.
Kamaldev Raghavan Chevron Energy Technology
Company Houston, TX, U.S.A.
Metin Karayaka Chevron Energy Technology
Company Houston, TX, U.S.A
Paul Hays Chevron Energy Technology Company
Houston, TX, U.S.A.
Yiannis Constantinides Chevron Energy Technology Company
Houston, TX, U.S.A.
ABSTRACT Riser wake interference analysis is conducted based on
analytical / semi-empirical models such as Blevins’ and Huse’s
models. These models are used for modeling the reduction in
particle flow velocity due to the presence of a cylindrical object
upstream in the flow path. However, these models are often too
conservative and accurate only for circular cylinders. Many top
tensioned risers (TTRs) use vortex induced vibration (VIV)
suppression devices such as strakes or fairings. There is a need
for alternate methods to obtain drag and lift coefficient datasets
for circular cylinders with strakes and fairings. Two such
approaches are to obtain data from Computational Fluid
Dynamics (CFD) simulations or from experimental large-scale
model test data. Interpolation and/or extrapolation methods are
needed to obtain additional data points for global riser finite
element analysis.
This paper presents a methodology to obtain hydrodynamic
coefficients for TTRs with VIV suppression devices. The
proposed methodology uses a combination of empirical
formulas based on Blevins’ model and numerical interpolation
techniques along with experimental tow tank test data and CFD
analysis. The resulting data is then input as user-defined
drag/lift coefficients into a global riser finite element analysis
to obtain a more realistic riser system response.
INTRODUCTION Analytical and semi-empirical models such as Blevins’ and
Huse’s are used for modeling the reduction in current velocity
due to the presence of a cylindrical object upstream in the flow
path. However, these models are often too conservative and
accurate only for circular cylinders. With the presence of VIV
suppression devices on both the upstream and downstream
risers, the risers no longer react as circular cylinders.
Additionally, existing models found in industry guidelines are
based on approximate theoretical models of bare cylinder wake
and nominally checked against small scale tests at low
Reynolds numbers. In actual conditions, the Reynolds number
is sufficiently high for risers fitted with VIV suppression
devices, [3].
Matrices of hydrodynamic drag and lift coefficients are
required for the user-defined wake interference capabilities in
global riser finite element analysis software. These drag
coefficients/drag coefficient factors and lift coefficients vary as
a function of the distance of the downstream riser from the
upstream riser. This variation in drag and lift coefficients due to
the wake effects induced by the upstream riser depend on a
number of factors including the distance between risers, drag
diameter, geometry of the riser (bare, fairing, strake), current
velocity, current direction and Reynolds number.
Learn more at www.2hoffshore.com

2 Copyright © 2015 by ASME
Wake Interference Analysis
Wake interference studies between riser pairs are carried
out by assessing a number of factors related to the flow regime,
and the structure. These parameters also include effects of any
VIV suppression devices. The interference between two risers
is evaluated by considering a conservative but realistic wake
model in which the flow behind the upstream cylinder is
modified resulting in reduced velocity downstream. The
downstream structure drag and lift coefficients used to model
this are expressed in terms of the upstream drag diameter
because of the geometric similarity of the wake field behind the
upstream structure.
A simplified riser schematic in profile view of the
upstream-downstream riser pair and the current profile is
illustrated in Figure 1.
Figure 1 – Upstream-Downstream Riser Pair with Current
The plan view of the upstream-downstream riser pair is
illustrated in Figure 2. The drag and lift coefficients are defined
in terms of functions of non-dimensional distances, L/Du and
T/Du, where L and T denote the in-line and transverse distances
between the centerlines of the downstream and upstream
cylinders, and Du is the drag diameter of the upstream cylinder.
When the downstream cylinder is within the wake
generated by the upstream cylinder, it experiences a reduced
drag force due to reduced mean current velocities in the wake
and a lift force as a result of varying pressures across the
cylinder. The drag and lift coefficients for the downstream
cylinder are calculated as functions of its position in the wake
as given in Equation 1 and Equation 2, respectively:
𝐶𝑑 = 𝐶𝑑0λ𝑑(𝐿 𝐷𝑢⁄ , 𝑇 𝐷𝑢⁄ ) = 𝐹𝐷 (1
2𝜌𝑈0
2𝐷𝑢)⁄ (1)
𝐶𝐿 = λ𝐿(𝐿 𝐷𝑢⁄ , 𝑇 𝐷𝑢⁄ ) = 𝐹𝐿 (1
2𝜌𝑈0
2𝐷𝑢)⁄ (2)
where, Cd0 denotes the undisturbed drag coefficients for the
downstream cylinder in the absence of wake effects; λd and λL
are the coefficient factors calculated from the appropriate wake
theory and, FD and FL denote the drag/lift force per unit length
for the downstream riser, U0 is the undisturbed current speed,
Du is the upstream drag diameter and ρ is the fluid density.
As illustrated in Figure 2, the upstream cylinder is at (Xu,
Yu), and the downstream cylinder is at (Xd, Yd). The in-line (L)
and transverse (T) distances can be calculated using Equation 3
and Equation 4, respectively:
𝐿 = 𝑑𝑋 ∗ cos 𝛼 + 𝑑𝑌 ∗ sin 𝛼 (3)
𝑇 = −𝑑𝑋 ∗ sin 𝛼 + 𝑑𝑌 ∗ cos𝛼 (4)
where α is the current direction angle, dX=Xd-Xu and dY=Yd-
Yu.
Figure 2 – Cylinder Model Plan View with Current
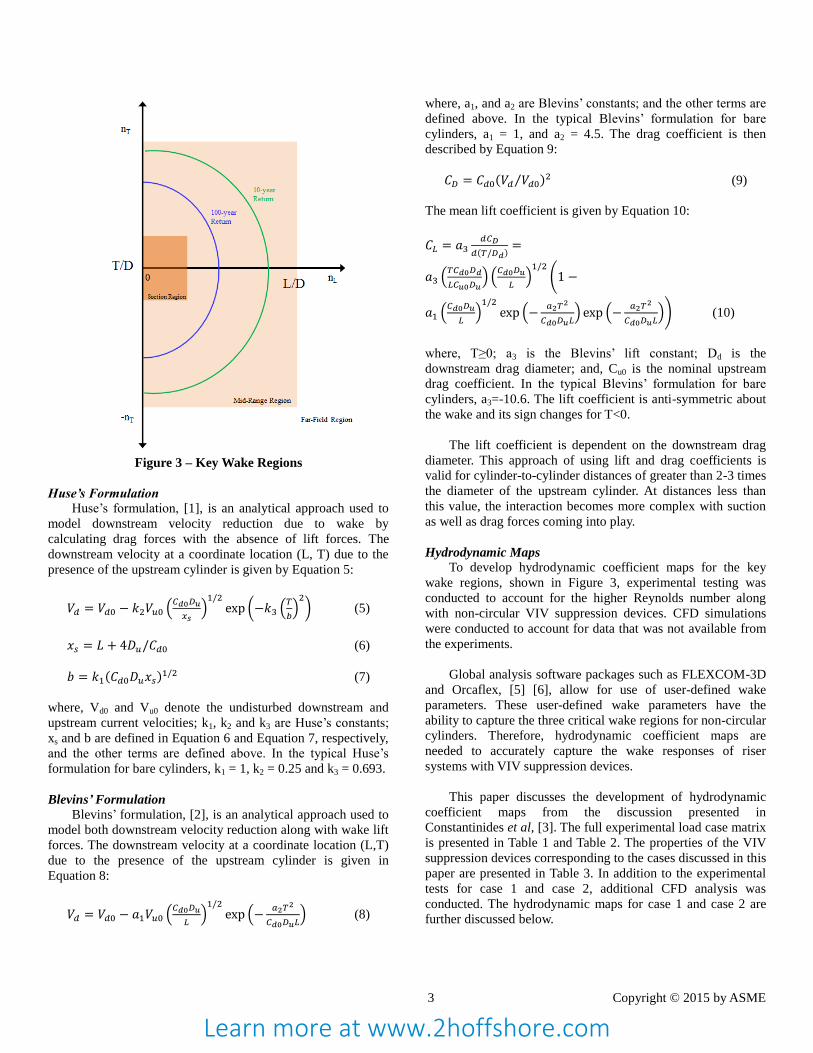
When considering the in-line and transverse distances
between two adjacent risers, there are three key wake regions as
defined in Figure 3. The three key regions are the suction
region, mid-range region and the far-field region. The suction
region corresponds to low in-line and transverse distances. In
the suction region, the drag and lift coefficient factors are
reduced so adjacent risers move closer to each other. The mid-
range region corresponds to in-line and transverse distances
that are typically experienced during 10-year and 100-year
return period environments. The far field region corresponds to
in-line and transverse distances that are great enough to
produce little change in the nominal drag and lift coefficients.
Downstream
Riser
Upstream
Riser
Current
Profile
Current
Direction
dX
dY
Upstream Riser
(Xu,Yu)
Downstream Riser
(Xd,Yd)
T
L
Global
Axes
Current
Direction
Y
X (α=0)
α
Learn more at www.2hoffshore.com
3 Copyright © 2015 by ASME
Figure 3 – Key Wake Regions
Huse’s Formulation
Huse’s formulation, [1], is an analytical approach used to
model downstream velocity reduction due to wake by
calculating drag forces with the absence of lift forces. The
downstream velocity at a coordinate location (L, T) due to the
presence of the upstream cylinder is given by Equation 5:
𝑉𝑑 = 𝑉𝑑0 − 𝑘2𝑉𝑢0 (𝐶𝑑0𝐷𝑢
𝑥𝑠)1/2
exp (−𝑘3 (𝑇
𝑏)2
) (5)
𝑥𝑠 = 𝐿 + 4𝐷𝑢/𝐶𝑑0 (6)
𝑏 = 𝑘1(𝐶𝑑0𝐷𝑢𝑥𝑠)1/2 (7)
where, Vd0 and Vu0 denote the undisturbed downstream and
upstream current velocities; k1, k2 and k3 are Huse’s constants;
xs and b are defined in Equation 6 and Equation 7, respectively,
and the other terms are defined above. In the typical Huse’s
formulation for bare cylinders, k1 = 1, k2 = 0.25 and k3 = 0.693.
Blevins’ Formulation
Blevins’ formulation, [2], is an analytical approach used to
model both downstream velocity reduction along with wake lift
forces. The downstream velocity at a coordinate location (L,T)
due to the presence of the upstream cylinder is given in
Equation 8:
𝑉𝑑 = 𝑉𝑑0 − 𝑎1𝑉𝑢0 (𝐶𝑑0𝐷𝑢
𝐿)1/2
exp (−𝑎2𝑇
2
𝐶𝑑0𝐷𝑢𝐿) (8)
where, a1, and a2 are Blevins’ constants; and the other terms are
defined above. In the typical Blevins’ formulation for bare
cylinders, a1 = 1, and a2 = 4.5. The drag coefficient is then
described by Equation 9:
𝐶𝐷 = 𝐶𝑑0(𝑉𝑑 𝑉𝑑0⁄ )2 (9)
The mean lift coefficient is given by Equation 10:
𝐶𝐿 = 𝑎3𝑑𝐶𝐷
𝑑(𝑇/𝐷𝑑)=
𝑎3 (𝑇𝐶𝑑0𝐷𝑑
𝐿𝐶𝑢0𝐷𝑢) (
𝐶𝑑0𝐷𝑢
𝐿)1/2
(1 −
𝑎1 (𝐶𝑑0𝐷𝑢
𝐿)1/2
exp (−𝑎2𝑇
2
𝐶𝑑0𝐷𝑢𝐿) exp (−
𝑎2𝑇2
𝐶𝑑0𝐷𝑢𝐿)) (10)
where, T≥0; a3 is the Blevins’ lift constant; Dd is the
downstream drag diameter; and, Cu0 is the nominal upstream
drag coefficient. In the typical Blevins’ formulation for bare
cylinders, a3=-10.6. The lift coefficient is anti-symmetric about
the wake and its sign changes for T<0.
The lift coefficient is dependent on the downstream drag
diameter. This approach of using lift and drag coefficients is
valid for cylinder-to-cylinder distances of greater than 2-3 times
the diameter of the upstream cylinder. At distances less than
this value, the interaction becomes more complex with suction
as well as drag forces coming into play.
Hydrodynamic Maps
To develop hydrodynamic coefficient maps for the key
wake regions, shown in Figure 3, experimental testing was
conducted to account for the higher Reynolds number along
with non-circular VIV suppression devices. CFD simulations
were conducted to account for data that was not available from
the experiments.
Global analysis software packages such as FLEXCOM-3D
and Orcaflex, [5] [6], allow for use of user-defined wake
parameters. These user-defined wake parameters have the
ability to capture the three critical wake regions for non-circular
cylinders. Therefore, hydrodynamic coefficient maps are
needed to accurately capture the wake responses of riser
systems with VIV suppression devices.
This paper discusses the development of hydrodynamic
coefficient maps from the discussion presented in
Constantinides et al, [3]. The full experimental load case matrix
is presented in Table 1 and Table 2. The properties of the VIV
suppression devices corresponding to the cases discussed in this
paper are presented in Table 3. In addition to the experimental
tests for case 1 and case 2, additional CFD analysis was
conducted. The hydrodynamic maps for case 1 and case 2 are
further discussed below.
Learn more at www.2hoffshore.com
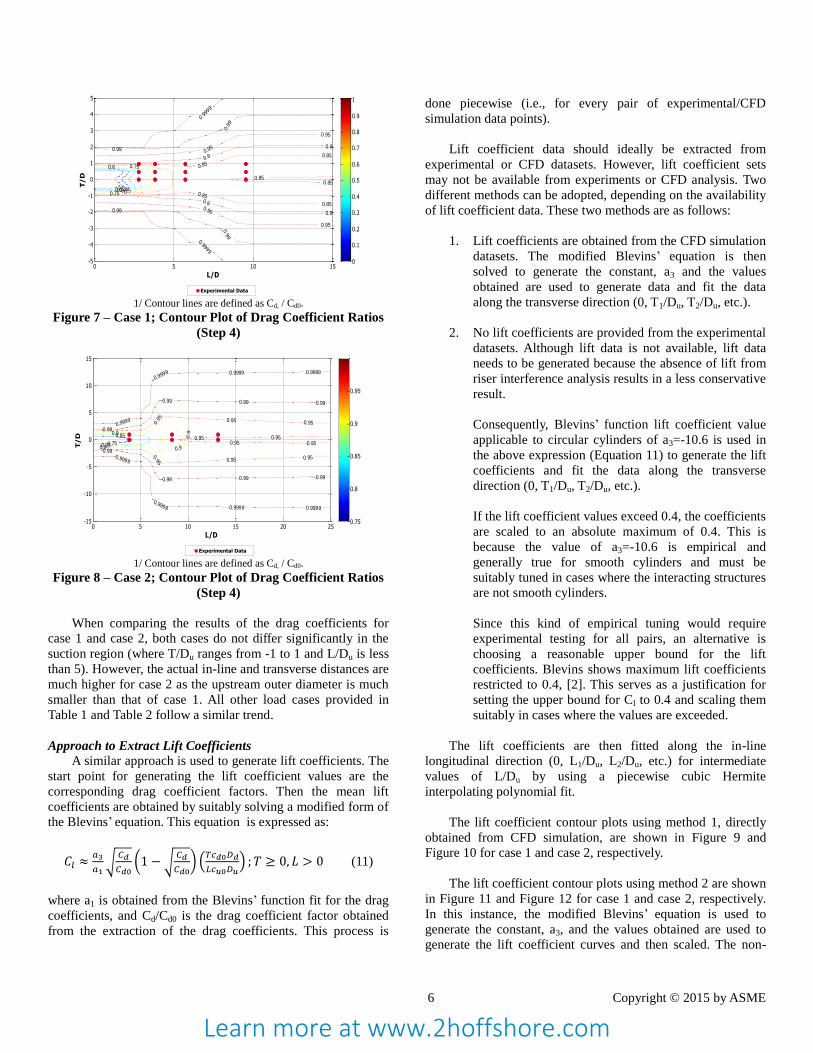
4 Copyright © 2015 by ASME
Table 1 – Load Case Matrix for Study, [3]
Case
No.
Upstream
Riser Pipe
Downstream
Riser Pipe
1
52” Riser Pipe with
ADFS Fairings
(29” Span)
14.5” Riser Pipe with
Triple Helix Strakes
2
21” Riser Pipe with
ADFS Fairings
(72” Span)
14.5” Riser Pipe with
Triple Helix Strakes
3 14.5” Riser Pipe with
Triple Helix Strakes
52” Riser Pipe with
ADFS Fairings
(29” Span)
4 14.5” Riser Pipe with
Triple Helix Strakes
21” Riser Pipe with
ADFS Fairings
(72” Span)
5 52” Bare Riser Pipe 14.5” Riser Pipe with
Triple Helix Strakes
6 14.5” Riser Pipe with
Triple Helix Strakes
14.5” Riser Pipe with
Triple Helix Strakes
Table 2 – Load Case Matrix Schematics
Case No. Schematic
1
2
3
4
5
6
Table 3 – VIV Suppression Devices for Case Study, [3]
Component S/D (1)
Pitch
ADFS Fairings (72” Span) 3.4 N/A
ADFS Fairings (29” Span) 1.4 N/A
Triple Helix Strakes N/A 17D 1/ Denotes span/diameter ratio.
DRAG COEFFICIENT DATA FROM LAB EXPERIMENTS AND CFD SIMULATIONS
To understand the effect of vortices being shed from an
upstream riser with non-cylindrical VIV suppression devices on
a downstream riser as a function of the spacing between them
and their offset relative to the flow direction, experimental
testing was conducted at the Institute for Ocean Technology
with the assistance of Oceanic Consulting Corporation.
Additional details regarding the experimental testing are
provided in Constantinides et al, [3].
A sequence of 3-dimensional, transient CFD simulations of
a pair of cylinders was performed for certain load cases; each
containing a variation of cylinder position, current velocity,
cylinder geometries and VIV mitigation devices. The load cases
and VIV suppression devices considered in the CFD
simulations were case 1 and case 2 (as defined in Table 1 and
Table 2). The simulations were performed at full scale,
prototypic Reynolds Numbers (ReADFS-29 ≈ 2x106, ReADFS-72 ≈
9x105, ReStrake ≈ 6x10
5).
To accurately produce lift and drag values for risers, a
transient simulation approach and a high resolution turbulence
model to resolve the wake vortex structures is considered.
Using this approach, a portion of the riser is modeled as it is
subjected to a constant undersea current. The simulation
proceeds in a time accurate fashion, resolving the 3-
dimensional vortices that are created in the wake, and tracking
the propagation downstream. The simulations are run for 10-20
shedding cycles of the riser to acquire statistics about the lift
and drag as well as the time averaged velocity field in the wake.
INTERPOLATION METHODOLOGY Experimental and CFD simulation data (if necessary) are
interpolated to obtain values for various distances from the
centerline of the upstream cylinder. A matrix of values is
generated in terms of ratios of longitudinal distance over drag
diameter (L/Du) and transverse distance over drag diameter
(T/Du). Three types of interpolation techniques are used:
1. Linear interpolation;
2. Blevins’ function fit in conjunction with
piecewise spline interpolation;
3. Piecewise Hermite interpolating polynomial.
Linear interpolation and linear extrapolation ensures a
straight line fit over each data interval. Spline interpolation uses
low-order polynomial fits in each of the data intervals and
ensures that they fit smoothly (i.e., splines have continuous
second derivatives). Hermite interpolating polynomials also
make use of polynomials fits, but the coefficients are instead
obtained using a recursive division process. Typically, spline
interpolation is more accurate than Hermite interpolating
polynomials if the data are values of a smooth function.
However, Hermite interpolating polynomials have no
Learn more at www.2hoffshore.com

5 Copyright © 2015 by ASME
overshoots and have fewer oscillations if the data is not smooth
(non-monotonic).
Additionally, the Blevins’ function is used to fit a bulk of
the data points along the transverse direction. The Blevins’
function is also incorporated in a piece-wise sense; i.e.,
different sets of Blevins’ coefficients are used to fit pairs of data
points. The Blevins’ coefficients used to generate the tables are
based on the nominal drag coefficients and diameters used in
the respective CFD simulation/laboratory experiment. Two sets
of Blevins’ functions are used, depending on whether the drag
coefficients or lift coefficients are generated.
Approach to Extract Drag Coefficients
A four step process is used to extract the drag coefficients
for all cases presented in Table 1 and Table 2. The steps to
generate the drag coefficients are provided using case 1 as an
example. The contour plots of drag coefficient ratios are
provided for case 1 and case 2 to show how these cases differ.
The steps used to generate the drag coefficients are as
follows:
1. The drag coefficient ratios are fitted along the in-line
longitudinal direction as shown in Figure 4 for case 1.
A piecewise cubic Hermite interpolating polynomial is
used to interpolate or extrapolate data based on each
set of experimental/CFD simulation data points.
2. The Blevins’ function is used to generate data and fit
the data along the transverse direction (0, T1/Du, T2/Du,
Tn/Du), where Tn/Du refers to the ratio of the transverse
distance of the nth data point to the upstream riser drag
diameter. This fit is carried out along each set of data
points obtained in the in-line longitudinal direction (0,
L1/Du, L2/Du, Lm/Du), where Lm/Du refers to the ratio
of the longitudinal distance of the mth data point to the
upstream riser drag diameter. Wherever the Blevins’ fit
does not pass through all the data points (typically in
the suction region), a combination cubic spline and
piecewise cubic Hermite interpolating polynomial fit
is used to ensure that the final fit passes through all the
data points obtained. Step 2 is illustrated in Figure 5.
3. The drag coefficient ratios are then fitted along the in-
line longitudinal direction (0, L1/Du, L2/Du, etc.) as
illustrated in Figure 6. A combination of linear
interpolation (in the suction region) and piecewise
cubic Hermite interpolating polynomial (when the
distance between the two risers is great enough) is
used to extrapolate the remaining data points along the
longitudinal direction (0, L1/Du, L2/Du, etc.).
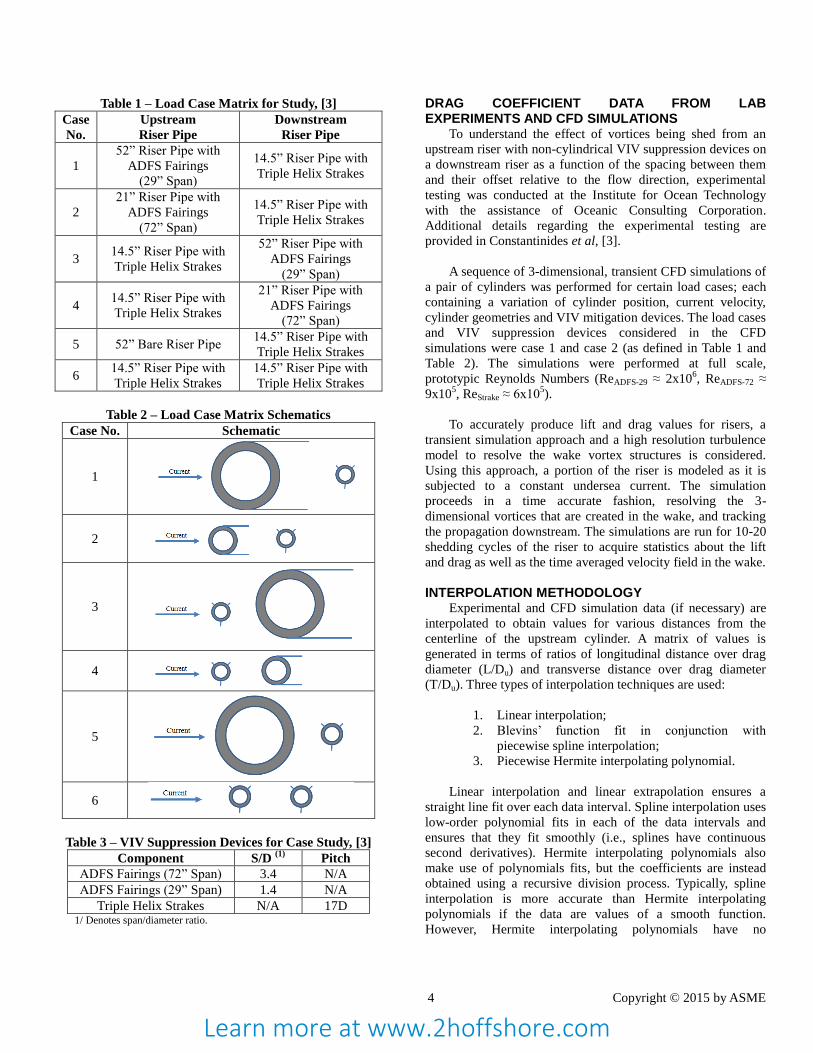
4. Steps 1-3 are repeated along every longitudinal and
transverse line of interest to generate a contour plot.
This data, including the illustrations in Figure 7 and
Figure 8, is generated with a longitudinal spacing of
0.05 between L=Du and L=2Du, 0.25 between L=2Du
and L=5Du, and 0.50 greater than L=5Du and a
transverse spacing of 0.05 between T=0 and T=Du,
and 0.50 greater than T= Du. This spacing is adopted
because most global riser analysis software, such as
FLEXCOM-3D and Orcaflex, [5] [6], require fine
spacing when the two cylinders are in close proximity.
Figure 4 – Case 1; Drag Coefficient Ratio Fitted along
Longitudinal Direction (T/Du=0) (Step 1)
Figure 5 – Case 1; Drag Coefficient Ratio Fitted along
Transverse Direction (L/Du=0) (Step 2)
Figure 6 – Case 1; Drag Coefficient Ratio Fitted along
Longitudinal Direction (T/Du=0) (Step 3)
Experimental Data Hermite Polynomial FitBlevins Eq. Huse Eq.
0 5 10 15 20 25-0.2
0
0.2
0.4
0.6
0.8
1
L/D-upstream
Cd
-do
wn
str
ea
m/
Cd
-no
min
al
Drag Ratio Fitted along Longitudinal Direction (Buoyant Fairing-Strake)
0 5 10 15 20 25-0.2
0
0.2
0.4
0.6
0.8
1
L/D-upstream
Cd
-do
wn
str
ea
m/C
d-n
om
ina
l
Drag Ratio Fitted along Longitudinal Direction (Buoyant Fairing-Strake)
Experimental Data Blevins Eq./Spline FitBlevins Eq. Huse Eq.
0 0.5 1 1.5 2 2.5 3 3.5 4-0.2
0
0.2
0.4
0.6
0.8
1
T/D-upstream
Cd
-do
wn
str
ea
m/
Cd
-no
min
al
Drag Ratio Fitted along Transverse Direction (Buoyant Fairing-Strake)
0 0.5 1 1.5 2 2.5 3 3.5 4-0.2
0
0.2
0.4
0.6
0.8
1
T/D-upstream
Cd
-do
wn
str
ea
m/
Cd
-no
min
al
Drag Ratio Fitted along Transverse Direction (Buoyant Fairing-Strake)
Piecewise cubic spline+cubic Hermite
interpolating polynomial fit
(Suction Region)
Piecewise Blevins fit
Experimental Data Hermite Polynomial/Linear FitBlevins Eq. Huse Eq.
0 5 10 15 20 25-0.2
0
0.2
0.4
0.6
0.8
1
L/D-upstream
Cd
-do
wn
str
ea
m/
Cd
-no
min
al
Drag Ratio Fitted along Longitudinal Direction (Buoyant Fairing-Strake)
0 5 10 15 20 25-0.2
0
0.2
0.4
0.6
0.8
1
L/D-upstream
Cd
-do
wn
str
ea
m/C
d-n
om
ina
l
Drag Ratio Fitted along Longitudinal Direction (Buoyant Fairing-Strake)
Linear Fit
(Suction Region)
Piecewise Cubic Hermite
Interpolating Polynomial Fit
Learn more at www.2hoffshore.com
6 Copyright © 2015 by ASME
1/ Contour lines are defined as Cd, / Cd0.
Figure 7 – Case 1; Contour Plot of Drag Coefficient Ratios
(Step 4)
1/ Contour lines are defined as Cd, / Cd0.
Figure 8 – Case 2; Contour Plot of Drag Coefficient Ratios
(Step 4)
When comparing the results of the drag coefficients for
case 1 and case 2, both cases do not differ significantly in the
suction region (where T/Du ranges from -1 to 1 and L/Du is less
than 5). However, the actual in-line and transverse distances are
much higher for case 2 as the upstream outer diameter is much
smaller than that of case 1. All other load cases provided in
Table 1 and Table 2 follow a similar trend.
Approach to Extract Lift Coefficients
A similar approach is used to generate lift coefficients. The
start point for generating the lift coefficient values are the
corresponding drag coefficient factors. Then the mean lift
coefficients are obtained by suitably solving a modified form of
the Blevins’ equation. This equation is expressed as:
𝐶𝑙 ≈𝑎3
𝑎1√
𝐶𝑑
𝐶𝑑0(1 − √
𝐶𝑑
𝐶𝑑0) (
𝑇𝑐𝑑0𝐷𝑑
𝐿𝑐𝑢0𝐷𝑢) ; 𝑇 ≥ 0, 𝐿 > 0 (11)
where a1 is obtained from the Blevins’ function fit for the drag
coefficients, and Cd/Cd0 is the drag coefficient factor obtained
from the extraction of the drag coefficients. This process is
done piecewise (i.e., for every pair of experimental/CFD
simulation data points).
Lift coefficient data should ideally be extracted from
experimental or CFD datasets. However, lift coefficient sets
may not be available from experiments or CFD analysis. Two
different methods can be adopted, depending on the availability
of lift coefficient data. These two methods are as follows:
1. Lift coefficients are obtained from the CFD simulation
datasets. The modified Blevins’ equation is then
solved to generate the constant, a3 and the values
obtained are used to generate data and fit the data
along the transverse direction (0, T1/Du, T2/Du, etc.).
2. No lift coefficients are provided from the experimental
datasets. Although lift data is not available, lift data
needs to be generated because the absence of lift from
riser interference analysis results in a less conservative
result.
Consequently, Blevins’ function lift coefficient value
applicable to circular cylinders of a3=-10.6 is used in
the above expression (Equation 11) to generate the lift
coefficients and fit the data along the transverse
direction (0, T1/Du, T2/Du, etc.).
If the lift coefficient values exceed 0.4, the coefficients
are scaled to an absolute maximum of 0.4. This is
because the value of a3=-10.6 is empirical and
generally true for smooth cylinders and must be
suitably tuned in cases where the interacting structures
are not smooth cylinders.
Since this kind of empirical tuning would require
experimental testing for all pairs, an alternative is
choosing a reasonable upper bound for the lift
coefficients. Blevins shows maximum lift coefficients
restricted to 0.4, [2]. This serves as a justification for
setting the upper bound for Cl to 0.4 and scaling them
suitably in cases where the values are exceeded.
The lift coefficients are then fitted along the in-line
longitudinal direction (0, L1/Du, L2/Du, etc.) for intermediate
values of L/Du by using a piecewise cubic Hermite
interpolating polynomial fit.
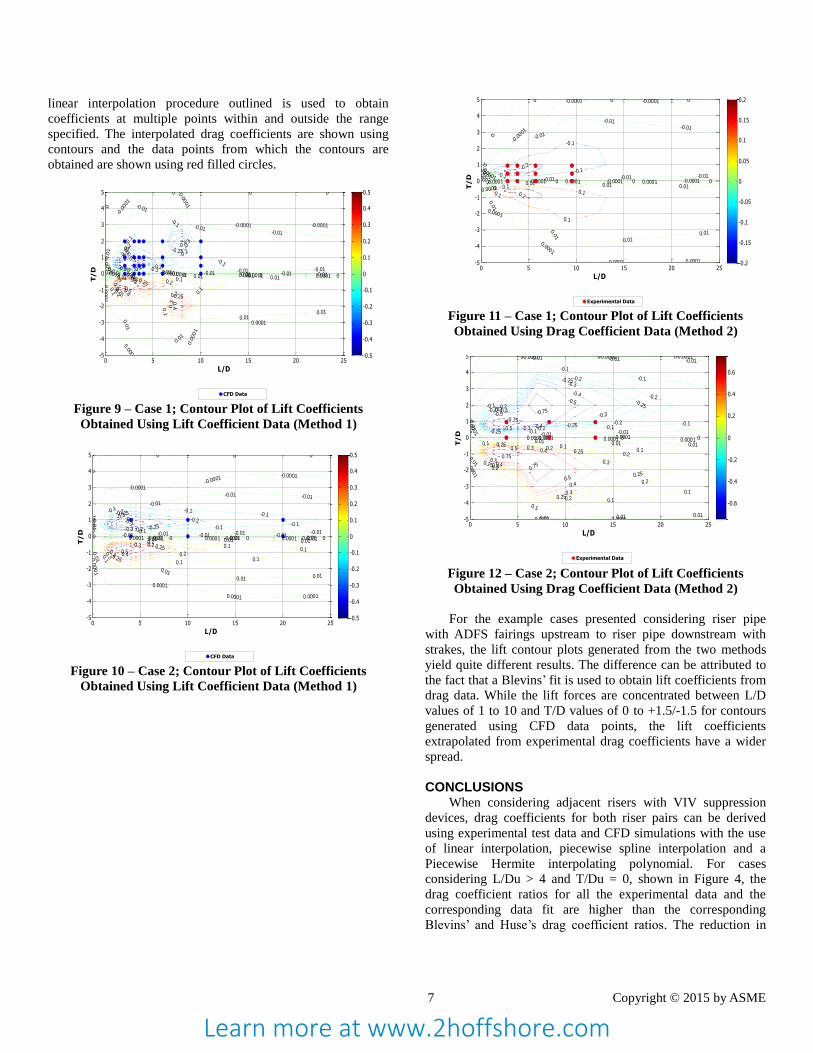
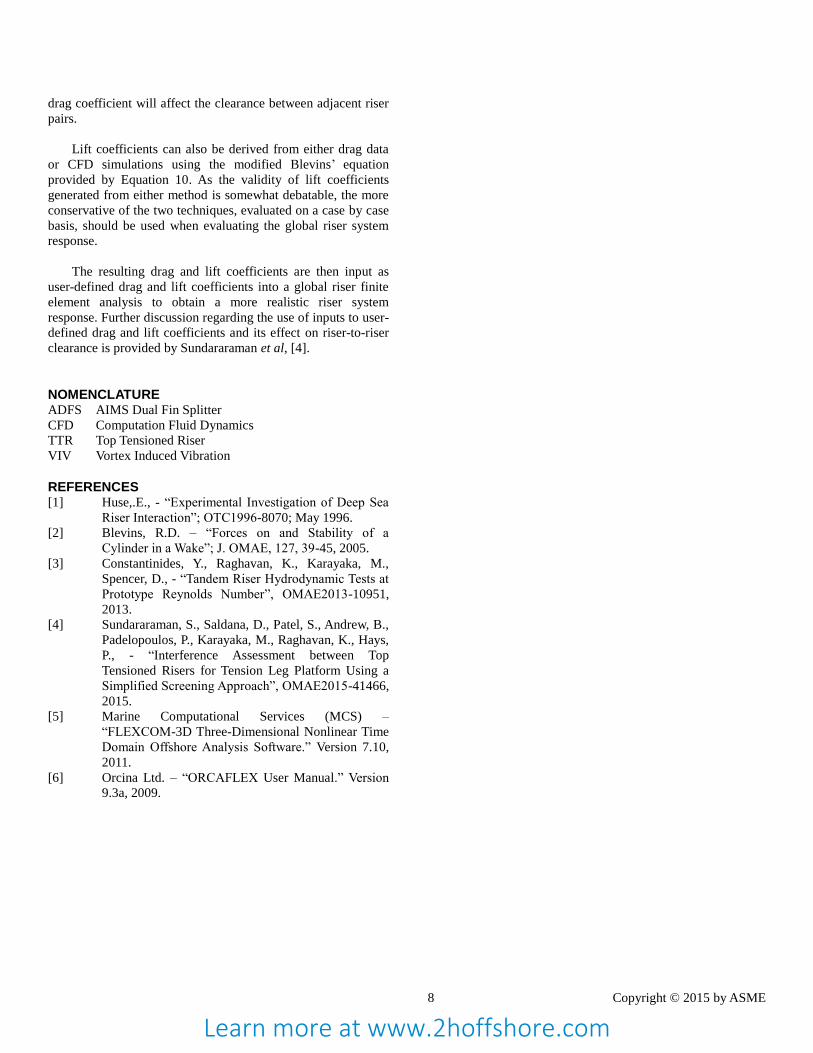
The lift coefficient contour plots using method 1, directly
obtained from CFD simulation, are shown in Figure 9 and
Figure 10 for case 1 and case 2, respectively.
The lift coefficient contour plots using method 2 are shown
in Figure 11 and Figure 12 for case 1 and case 2, respectively.
In this instance, the modified Blevins’ equation is used to
generate the constant, a3, and the values obtained are used to
generate the lift coefficient curves and then scaled. The non-
Experimental Data
0.10.20.30.40.5
0.6 0.75
0.75
0.85
0.85
0.85
0.85
0.850.85
0.9
0.9
0.9
0.9
0.95
0.95
0.95
0.95
0.99
0.9
9
0.99
0.9
9
0.99
99
0.9999
L/D
T/
DDrag Coefficient Ratio (Buoyant Fairing-Strake)
0 5 10 15-5
-4
-3
-2
-1
0
1
2
3
4
5
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Experimental Data
0.75
0.85
0.85
0.9
0.9
0.90.9
0.95 0.95 0.95
0.95 0.95 0.95
0.950.950.95 0.95
0.99
0.99 0.99 0.99
0.99
0.99 0.99 0.99
0.9999
0.9999 0.9999 0.9999
0.9999
0.9999 0.9999 0.9999
L/D
T/
D
Drag Coefficient Ratio (Non-Buoyant Fairing-Strake)
0 5 10 15 20 25-15
-10
-5
0
5
10
15
0.75
0.8
0.85
0.9
0.95
Learn more at www.2hoffshore.com
7 Copyright © 2015 by ASME
linear interpolation procedure outlined is used to obtain
coefficients at multiple points within and outside the range
specified. The interpolated drag coefficients are shown using
contours and the data points from which the contours are
obtained are shown using red filled circles.
Figure 9 – Case 1; Contour Plot of Lift Coefficients
Obtained Using Lift Coefficient Data (Method 1)
Figure 10 – Case 2; Contour Plot of Lift Coefficients
Obtained Using Lift Coefficient Data (Method 1)
Figure 11 – Case 1; Contour Plot of Lift Coefficients
Obtained Using Drag Coefficient Data (Method 2)
Figure 12 – Case 2; Contour Plot of Lift Coefficients
Obtained Using Drag Coefficient Data (Method 2)
For the example cases presented considering riser pipe
with ADFS fairings upstream to riser pipe downstream with
strakes, the lift contour plots generated from the two methods
yield quite different results. The difference can be attributed to
the fact that a Blevins’ fit is used to obtain lift coefficients from
drag data. While the lift forces are concentrated between L/D
values of 1 to 10 and T/D values of 0 to +1.5/-1.5 for contours
generated using CFD data points, the lift coefficients
extrapolated from experimental drag coefficients have a wider
spread.
CONCLUSIONS When considering adjacent risers with VIV suppression
devices, drag coefficients for both riser pairs can be derived
using experimental test data and CFD simulations with the use
of linear interpolation, piecewise spline interpolation and a
Piecewise Hermite interpolating polynomial. For cases
considering L/Du > 4 and T/Du = 0, shown in Figure 4, the
drag coefficient ratios for all the experimental data and the
corresponding data fit are higher than the corresponding
Blevins’ and Huse’s drag coefficient ratios. The reduction in
CFD Data
-0.5-0.4
-0.4
-0.3
-0.3
-0.3
-0.25
-0.25 -0.25
-0.2
-0.2
-0.2
-0.1
-0.1
-0.1
-0.1
-0.01-0.01
-0.01
-0.0
1
-0.01 -0.01 -0.01-0.01-0.01 -0.01 -0.01-0.01
-0.0001-0.0001
-0.0
001
-0.0001
-0.0
001
-0.0001 -0.0001
-0.0
001
000
0
00 0 00 0.00010.00010.00010.0001
0.0
001
0.0001
0.0
001
0.0001
0.010.010.01
0.0
1
0.01
0.010.01
0.010.1
0.1
0.1
0.1
0.2
0.2
0.2
0.250.25
0.25
0.3
0.3
0.3
0.4
0.4
0.5
L/D
T/
D
Lift Coefficient (Buoyant Fairing-Strake)
0 5 10 15 20 25-5
-4
-3
-2
-1
0
1
2
3
4
5
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
CFD Data
-0.5-0.4
-0.3
-0.3
-0.25
-0.25
-0.2
-0.2
-0.2
-0.1-0.1
-0.1
-0.1-0.1-0.1
-0.01-0.01
-0.01
-0.0
1
-0.01 -0.01 -0.01-0.01-0.01-0.01 -0.01 -0.01 -0.01
-0.0001-0.0001
-0.0001
-0.0
001
-0.0001 -0.0001 -0.0001
000
0
0 0 0 00.00010.00010.0001
0.0
00
1
0.0001
0.0001 0.0001
0.010.010.01
0.0
1
0.010.01 0.01
0.10.1
0.1
0.10.1
0.1
0.2
0.20.2
0.25
0.25
0.30.3 0.4
0.5
L/D
T/D
Lift Coefficient (Slick Fairing-Strake)
0 5 10 15 20 25-5
-4
-3
-2
-1
0
1
2
3
4
5
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Experimental Data
-0.2
-0.1-0.1
-0.1
-0.01
-0.01
-0.01
-0.0
1
-0.01 -0.01 -0.01
-0.0001-0.0001
-0.0
001
-0.0001-0.0001 -0.0001 -0.0001
-0.0001
000
0
0 0 0 0
0
0.00010.00010.0001
0.0001
0.0001
0.0001 0.0001
0.0001
0.010.010.01
0.0
1
0.0
1
0.010.01
0.01
0.10.1
0.1
0.1 0.2
L/D
T/D
Lift Coefficient (Drag Extrap.) (Buoyant Fairing-Strake)
0 5 10 15 20 25-5
-4
-3
-2
-1
0
1
2
3
4
5
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Experimental Data
-0.75
-0.75
-0.5
-0.5
-0.5
-0.4
-0.4
-0.4
-0.3
-0.3
-0.3
-0.3
-0.25-0.25
-0.25
-0.25
-0.25
-0.2-0.2
-0.2
-0.2
-0.2
-0.1
-0.1
-0.1
-0.1-0.1
-0.1
-0.01-0.01-0.01
-0.0
1
-0.01 -0.01
-0.0001-0.0001-0.0001
-0.0
001
-0.0001 -0.0001
000
0
0 0 00.00010.00010.0001
0.0
001
0.0001 0.0001
0.010.010.01
0.01
0.01 0.01 0.01
0.10.1
0.1
0.1
0.1
0.1
0.20.2
0.2
0.2
0.2
0.250.25
0.25
0.25
0.25
0.3
0.3
0.3
0.3
0.4
0.4
0.4
0.5
0.5
0.50.75
0.75
L/D
T/
D
Lift Coefficient (Drag Extrap.) (Non-Buoyant Fairing-Strake)
0 5 10 15 20 25-5
-4
-3
-2
-1
0
1
2
3
4
5
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Learn more at www.2hoffshore.com
8 Copyright © 2015 by ASME
drag coefficient will affect the clearance between adjacent riser
pairs.
Lift coefficients can also be derived from either drag data
or CFD simulations using the modified Blevins’ equation
provided by Equation 10. As the validity of lift coefficients
generated from either method is somewhat debatable, the more
conservative of the two techniques, evaluated on a case by case
basis, should be used when evaluating the global riser system
response.
The resulting drag and lift coefficients are then input as
user-defined drag and lift coefficients into a global riser finite
element analysis to obtain a more realistic riser system
response. Further discussion regarding the use of inputs to user-
defined drag and lift coefficients and its effect on riser-to-riser
clearance is provided by Sundararaman et al, [4].
NOMENCLATURE ADFS AIMS Dual Fin Splitter
CFD Computation Fluid Dynamics
TTR Top Tensioned Riser
VIV Vortex Induced Vibration
REFERENCES [1] Huse,.E., - “Experimental Investigation of Deep Sea
Riser Interaction”; OTC1996-8070; May 1996.
[2] Blevins, R.D. – “Forces on and Stability of a
Cylinder in a Wake”; J. OMAE, 127, 39-45, 2005.
[3] Constantinides, Y., Raghavan, K., Karayaka, M.,
Spencer, D., - “Tandem Riser Hydrodynamic Tests at
Prototype Reynolds Number”, OMAE2013-10951,
2013.
[4] Sundararaman, S., Saldana, D., Patel, S., Andrew, B.,
Padelopoulos, P., Karayaka, M., Raghavan, K., Hays,
P., - “Interference Assessment between Top
Tensioned Risers for Tension Leg Platform Using a
Simplified Screening Approach”, OMAE2015-41466,
2015.
[5] Marine Computational Services (MCS) –
“FLEXCOM-3D Three-Dimensional Nonlinear Time
Domain Offshore Analysis Software.” Version 7.10,
2011.
[6] Orcina Ltd. – “ORCAFLEX User Manual.” Version
9.3a, 2009.
Learn more at www.2hoffshore.com