introduction basic definitions different model types system...
TRANSCRIPT

Lecture 1: Introduction to System Modeling and Control
• Introduction• Basic Definitions• Different Model Types• System Identification

What is Mathematical Model?A set of mathematical equations (e.g., differential eqs.) that describes the input-output behavior of a system.What is a model used for?
• Simulation
• Prediction/Forecasting
• Prognostics/Diagnostics
• Design/Performance Evaluation
• Control System Design

Definition of System
System: An aggregation or assemblage of things so combined by man or nature to form an integral and complex whole.
From engineering point of view, a system is defined as an interconnection of many components or functional units act together to perform a certain objective, e.g., automobile, machine tool, robot, aircraft, etc.

System VariablesTo every system there corresponds three sets of variables:
Input variables originate outside the system and are not affected by what happens in the system
Output variables are the internal variables that are used to monitor or regulate the system. They result from the interaction of the system with its environment and are influenced by the input variables
Systemu y

Dynamic SystemsA system is said to be dynamic if its current output may depend on the past history as well as the present values of the input variables. Mathematically,
Time : Input, :]0),([)(
tututy ≤τ≤τϕ=
Example: A moving mass
M
yu
Model: Force=Mass x Acceleration
uyM =

Example of a Dynamic SystemVelocity-Force: ∫ ττ+==
t
duM
ytytv0
)(1)0()()(
Therefore, this is a dynamic system. If the drag force (bdx/dt) is included, then
uybyM =+
2nd order ordinary differential equation (ODE)
Position-Force:
dsduM
ytytyt s
∫ ∫ ττ++=0 0
)(1)0()0()(

Mathematical Modeling BasicsMathematical model of a real world system is derived using analytical and experimental means
• Analytical model is derived based on governing physical laws for the system such as Newton's law, Ohms law, etc.
• It is often assembled into a single or system of differential (difference in the case of discrete-time systems) equations
• An analytical model maybe linear or nonlinear

Mathematical Modeling Basics
• A nonlinear model is often linearized about a certain operating point
• Model reduction (or approximation) may be needed to get a lumped-parameter (finite dimensional) model
• Numerical values of the model parameters are often approximated from experimental data by curve fitting.

Different Types of Lumped-Parameter Models
Input-output differential or difference equation
State equations (system of 1st order eqs.)
Transfer function
Nonlinear
Linear
Linear Time Invariant
System Type Model Type

Input-Output Models Differential Equations (Continuous-Time Systems)
ubububyayayay nnn
nnnn +++=++++ −
−−
−1
)1(11
)1(1
)(
)()1()()1()( 11 nkubkubnkyakyaky nn −++−+−++−=
Difference Equations (Discrete-Time Systems)
DiscretizationInverse Discretization

Example II: AccelerometerConsider the mass-spring-damper (may be used as accelerometer or seismograph) system shown below:
Free-Body-Diagram
M
fs
fd
fs
fd
x
fs(y): position dependent spring force, y=x-ufd(y): velocity dependent spring force
Newton’s 2nd law ( ) )()( yfyfuyMxM sd −−=+=
Linearizaed model: uMkyybyM =++
M
ux

Example II: Delay Feedback
Delayz-1
u y
Consider the digital system shown below:
Input-Output Eq.: )1()1()( −+−= kukyky
Equivalent to an integrator: ∑−
=
=1
0)()(
k
jjuky
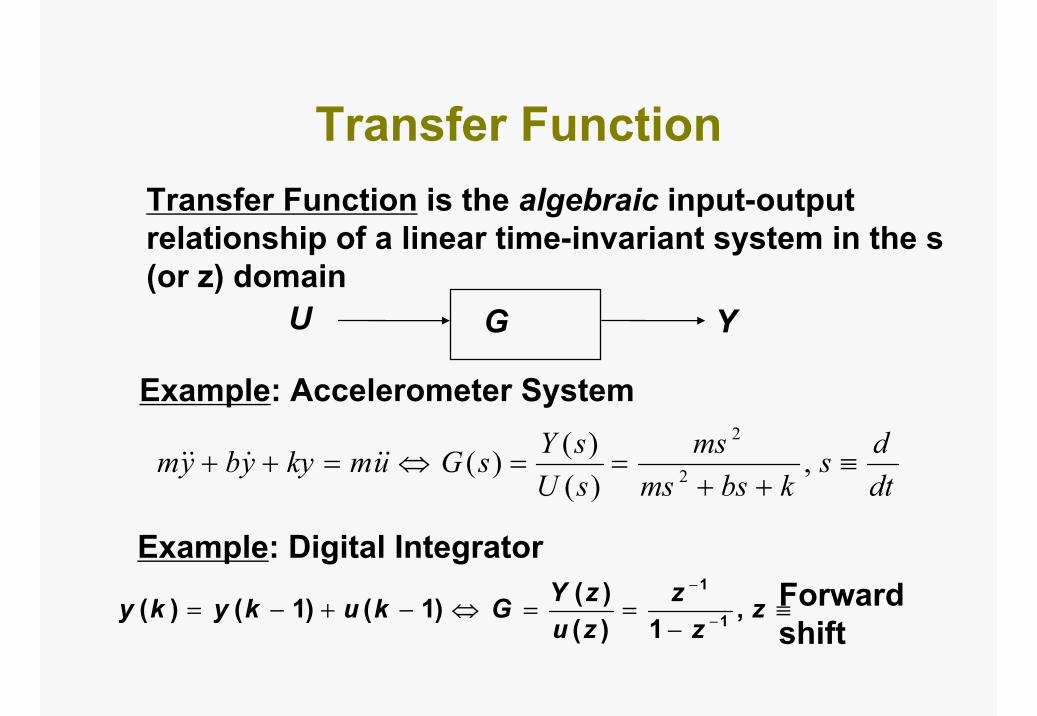
Transfer FunctionTransfer Function is the algebraic input-output relationship of a linear time-invariant system in the s (or z) domain
GU Y
dtds
kbsmsms
sUsYsGumkyybym ≡
++==⇔=++ ,
)()()( 2
2
Example: Accelerometer System
Example: Digital Integrator
≡−
==⇔−+−= −
−
zz
zzuzYGkukyky ,
1)()()1()1()( 1
1 Forward shift

Comments on TF
• Transfer function is a property of the system independent from input-output signal
• It is an algebraic representation of differential equations
• Systems from different disciplines (e.g., mechanical and electrical) may have the same transfer function
Mixed Systems
• Most systems in mechatronics are of the mixed type, e.g., electromechanical, hydromechanical, etc
• Each subsystem within a mixed system can be modeled as single discipline system first
• Power transformation among various subsystems are used to integrate them into the entire system
• Overall mathematical model may be assembled into a system of equations, or a transfer function

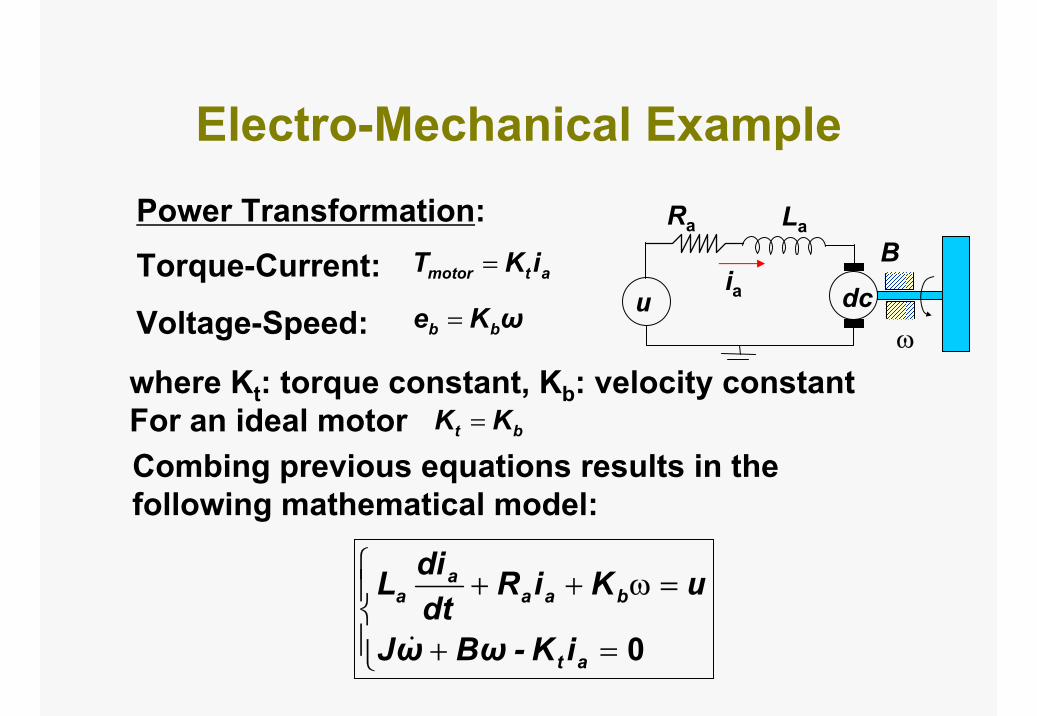
Electro-Mechanical Example
voltage emf-backe,edtdiLiRu bb
aaaa =++=
Mechanical Subsystem BωωJTmotor +=
uia dc
Ra La
Jω
BInput: voltage uOutput: Angular velocity ω
Elecrical Subsystem (loop method):
Electro-Mechanical Example
uia dc
Ra La
ω
Torque-Current:
Voltage-Speed:atmotor iKT =
Combing previous equations results in the following mathematical model:
BPower Transformation:
ωKe bb =
=+
=ω++
0at
baaa
a
iK-BωωJ
uKiRdtdiL
where Kt: torque constant, Kb: velocity constant For an ideal motor bt KK =

Transfer Function of Electromechanical Example
Taking Laplace transform of the system’s differential equations with zero initial conditions gives:
Eliminating Ia yields the input-output transfer function
( ) btaaa2
a
t
KKBRBLJRJsLK
U(s)Ω(s)
++++=
uia Kt
Ra La
ω
B( )( )
=Ω+=Ω++
0)()()()(
sIK-(s)BJssUsKsIRsL
at
baaa
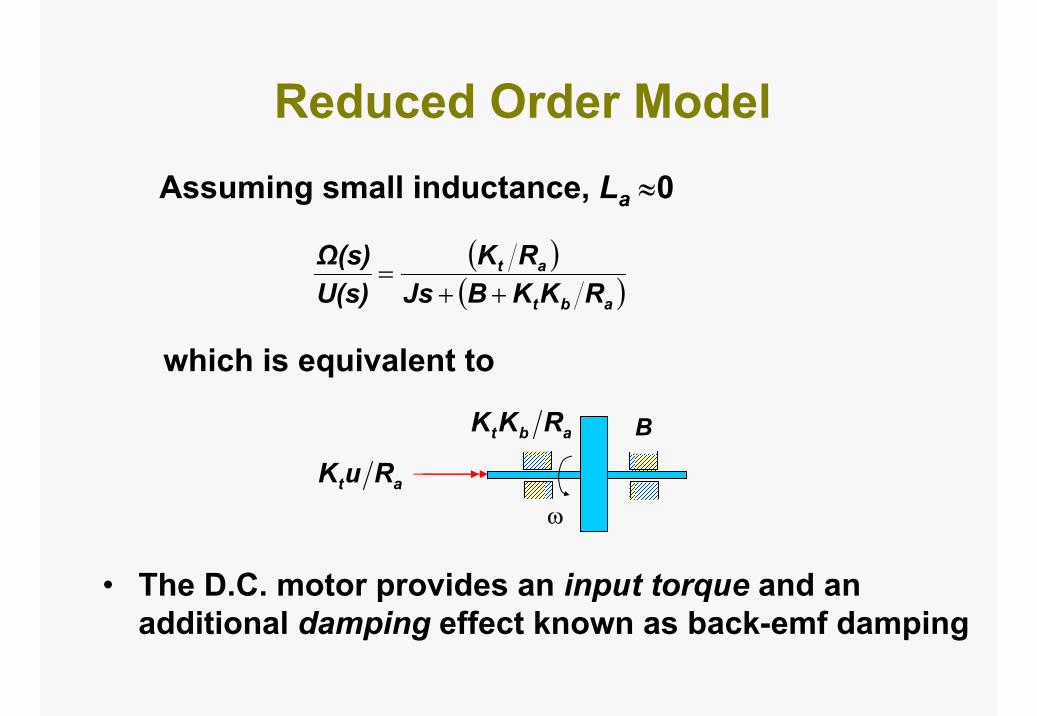
Reduced Order ModelAssuming small inductance, La ≈0
( )( )abt
at
RKKBJsRK
U(s)Ω(s)
++=
which is equivalent to
ωat RuK
Babt RKK
• The D.C. motor provides an input torque and an additional damping effect known as back-emf damping

System identification
• Parametric Identification: The input-output model coefficients are estimated to “fit” the input-output data.
• Frequency-Domain (non-parametric): The Bode diagram [G(jw) vs. w in log-log scale] is estimated directly form the input-output data. The input can either be a sweeping sinusoidal or random signal.
Experimental determination of system model. There are two methods of system identification:
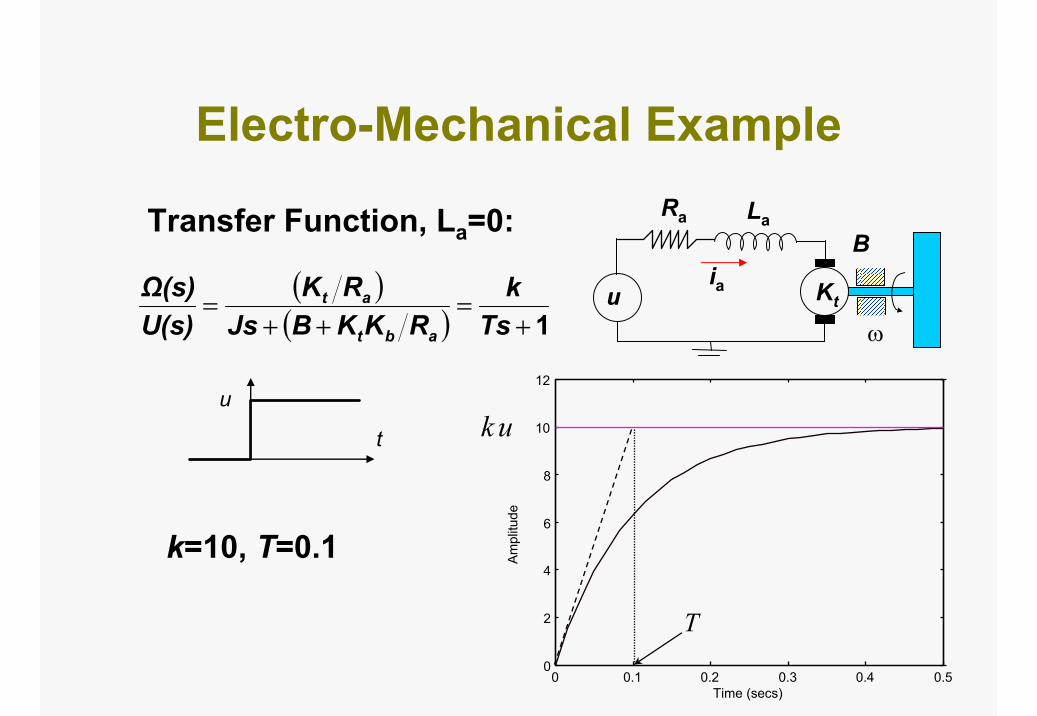
Electro-Mechanical Example
uia Kt
Ra La
ω
B
( )( ) 1+
=++
=Ts
kRKKBJs
RKU(s)Ω(s)
abt
at
Transfer Function, La=0:
0 0.1 0.2 0.3 0.4 0.50
2
4
6
8
10
12
Time (secs)
Ampl
itude
ku
T
u
t
k=10, T=0.1
Comments on First Order Identification
Graphical method is
• difficult to optimize with noisy data and multiple data sets
• only applicable to low order systems
• difficult to automate

Least Squares Estimation
Given a linear system with uniformly sampled input output data, (u(k),y(k)), then
noisenkubkubnkyakyaky nn +−++−+−++−= )()1()()1()( 11
Least squares curve-fitting technique may be used to estimate the coefficients of the above model called ARMA (Auto Regressive Moving Average) model.

System Identification Structure
Input: Random or deterministic
Random Noise
u
Output
n
plant
Noise model
• persistently exciting with as much power as possible;• uncorrelated with the disturbance • as long as possible
y
Basic Modeling Approaches• Analytical
• Experimental
– Time response analysis (e.g., step, impulse)– Parametric
* ARX, ARMAX
* Box-Jenkins
* State-Space
– Nonparametric or Frequency based
* Spectral Analysis (SPA)
* Emperical Transfer Function Analysis (ETFE)

Real-World Linear Motor Example
u: voltage
y: position

Experimental Input-Output Data
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.4
-0.2
0
0.2
0.4
inpu
t
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-4
-2
0
2
4x 10-3
Time (sec)
outp
ut

ARMA ModelAssume a 2nd order ARMA model
)2()1()2()1()( 2121 −+−+−+−= kubkubkyakyaky
Least squares fit is used to determine ai’sand bi’s
%Load input-output data U,Y
TH=arx([Y,U],[2,2,1]);
Matlab commands:

Model Validation
0 1000 2000 3000 4000 5000 6000-3
-2
-1
0
1
2
3x 10-3
Yellow: Model output, Magenta: Measured output
Output # 1 Fit: 0.00067122

Model Step Response
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.005
0.01
0.015
0.02
0.025
0.03ou
tput
Time (sec)
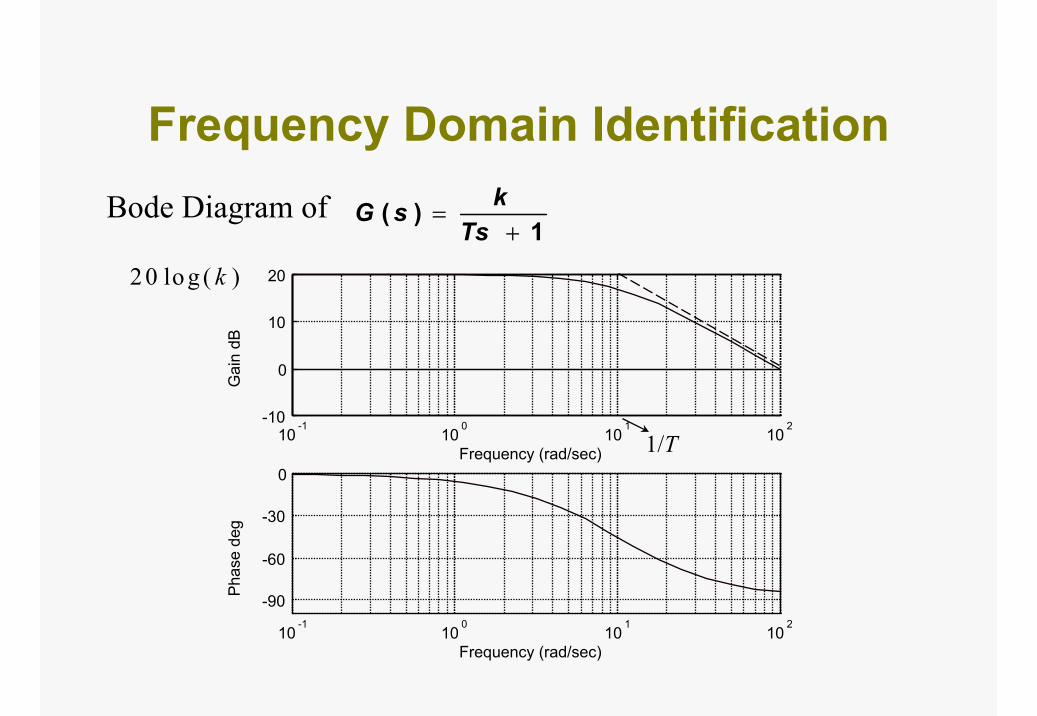
Frequency Domain IdentificationBode Diagram of
10-1
100
101
102-10
0
10
20
Frequency (rad/sec)
Gai
n dB
10-1
100
101
102
-30
-60
-90
0
Frequency (rad/sec)
Phas
e de
g
1/T
20 log ( )k
1)(
+=
TsksG

Identification DataMethod I (Sweeping Sinusoidal):
systemAi Ao
f
t>>0
M agn itu de P hased b
=
=
AAi
0 , φ
Method II (Random Input):
system
Transfer function is determined by analyzing the spectrum of the input and output

Random Input Method• Pointwise Estimation:
)()()(
ωω
=ωUYjG
This often results in a very nonsmooth frequency response because of data truncation and noise.
• Spectral estimation: uses “smoothed” sample estimators based on input-output covariance and crosscovariance.
The smoothing process reduces variability at the expense of adding bias to the estimate
)(ˆ)(ˆ
)(ˆωΦ
ωΦ=ω
u
yujeG

Matlab Commands to get Bode plot:
0 1 2 3 4 50
5
10
15
Time (sec)
Out
put
0 1 2 3 4 5-1
0
1
2
Inpu
t
> % Create Random Input U
> % Collect system response Y to input U
> Z=detrend([Y,U]);
> G=spa(Z);
> Gs=sett(G,Ts); %specify sampling time Ts
> bodeplot(Gs)
Random Input Response
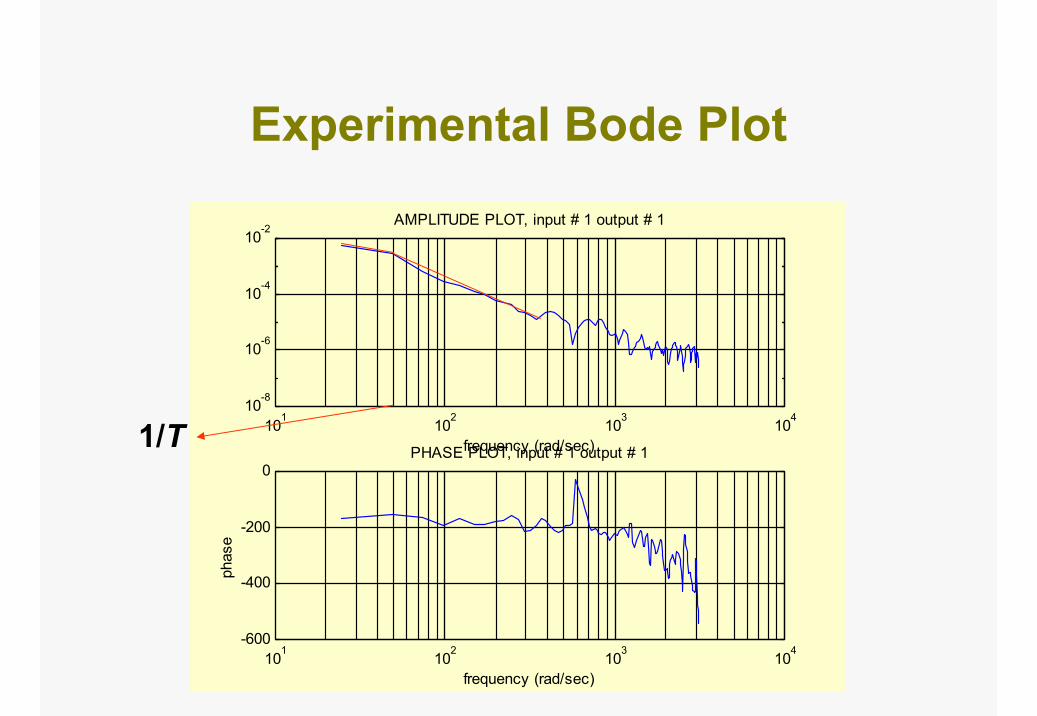
Experimental Bode Plot
101 102 103 10410-8
10-6
10-4
10-2
frequency (rad/sec)
AMPLITUDE PLOT, input # 1 output # 1
101 102 103 104-600
-400
-200
0PHASE PLOT, input # 1 output # 1
frequency (rad/sec)
phas
e
1/T

Photo Receptor Drive Test Fixture

Experimental Bode Plot
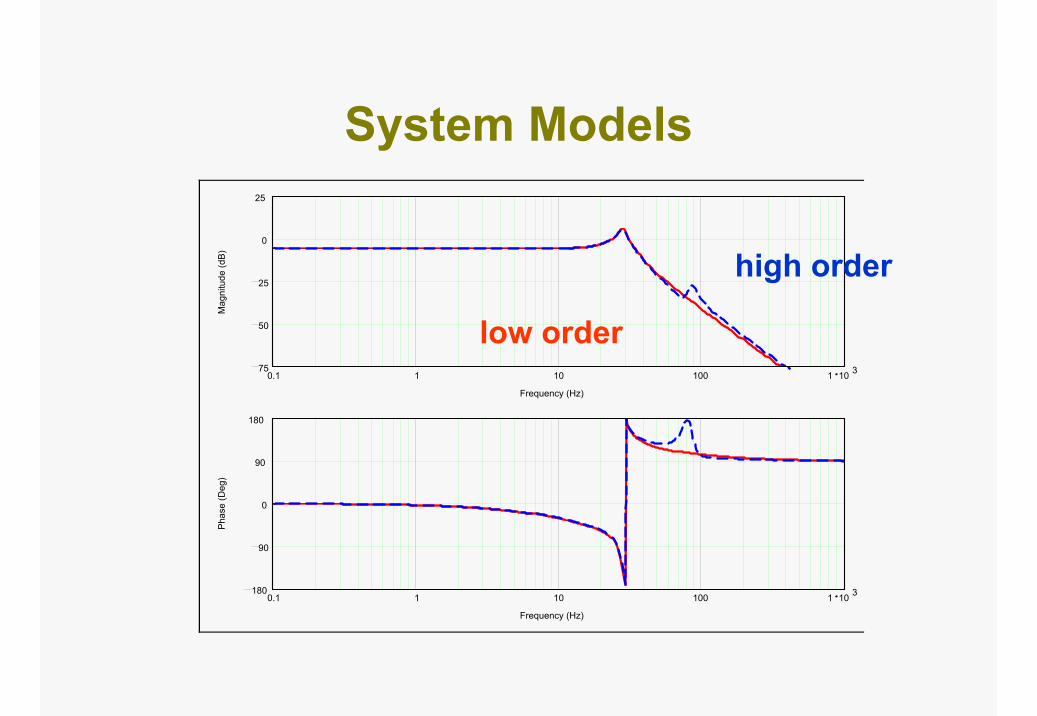
System Models
0.1 1 10 100 1 10 375
50
25
0
25
Frequency (Hz)
Mag
nitu
de (d
B)
0.1 1 10 100 1 10 3180
90
0
90
180
Frequency (Hz)
Phas
e (D
eg)
high order
low order